Computer Model Calibration: Bayesian Methods for Combining Simulations and Experiments for Inference and Prediction
|
|
|
- Merilyn Waters
- 5 years ago
- Views:
Transcription
1 Computer Model Calibration: Bayesian Methods for Combining Simulations and Experiments for Inference and Prediction
2 Example The Lyon-Fedder-Mobary (LFM) model simulates the interaction of solar wind plasma in the magnetosphere We see this as the Aurora Borealis Have a computer model that attempts to capture the main features of this phenomenon Outputs are large 3-dimensional space-time fields or extracted features thereof Computer model has three inputs: =(,, R)
3 Example Field observations available from the Polar Ultraviolet Imager satellite Computer model is assumed to capture all salient features of the solar wind interactions, up to random error However, the inputs ( =(,, R) ) are not known Scientific problem: estimate =(,, R)
4
5 Basic inverse problem Statistical formulation y s (t) = (t) y f ( ) = ( )+ Where, y f system response y s simulator response at input t θ calibration parameters ε random error Have data from 2 separate sources computer model and field observations Problem is to estimate the calibration parameters
6 Solutions Many different solutions to such problems can you think of one? Suppose the computer model is fast? Suppose the computer model is slow?
7 Model calibration Statistical formulation y s (x, t) = (x, t) y f (x, ) = (x, )+ Where, x model or system inputs; y f system response y s simulator response θ calibration parameters ε random error Have data from 2 separate sources computer model and field observations Problem is to estimate the calibration parameters
8 Solutions Many different solutions to such problems can you think of one? Suppose the computer model is fast? Suppose the computer model is slow?


9 Example: Radiative shock experiment A radiative shock is a wave in which both hydrodynamic and radiation transport physics play a significant role in the shock s propagation and structure

10 Application Initial experiments:" 1 ns, 3.8 kj laser irradiates Be diskè plasma down Xe gas filled shock tube at ~ 200 km/s" Circular tube; diam = 575μm" Timing ns" Additional experiments " Laser energy ~ 3.8kJ" Circular tube; diam = 575, 1150μm" Timing 13,20,26 ns" Nozzle experiments" Laser energy ~ 3.8kJ" nozzle length = taper length = 500μm" Circular tube; diam = 575μm" Timing 26 ns" " Extrapolation experiments (5 th year) " Laser energy ~ 3.8kJ" Elliptical tube; diam = μm" Aspect ratio = 2" Includes nozzle in shock tube" Timing 26 ns" Laser Laser Laser Laser Be disk shock tube 575μm tube filled with Xe gas ~1.2atm shock tube 1150μm nozzle length taper length 575μm 1150μm shock tube 1150μm 575μm



11 Have several outputs & inputs y Outputs ( ) Shock location Shock breakout time Wall shock location Axial centroid of Xe Area of dense Xe Shock location x Inputs ( ) Observation time Laser energy Be disk thickness Xe gas pressure Tube geometry Calibration parameters ( ) Vary with model Electron flux limiter Laser scale factor Fixed window Centroid of dense Xe Wall shock location Area of dense Xe







12 We can measure and we can compute 600 µm 1200 µm Circular Elliptical tube tube nozzle nozzle Goal is to predict elliptical tube quantities of interest and uncertainty, without using any data from elliptical Department tube of Statistics experiments and Actuarial Science Shocks at 13 ns

13 Data Have observations from 1-D CRASH model and experiments Experiment data: 9 experiments experiment variables: Be thickness, Laser Energy, Xe pressure and Time responses: Shock location 1-D CRASH Simulations 320 simulations, varied over 8 inputs experiment variables: Be thickness, Laser Energy, Xe pressure and Time calibration parameters: Be Gamma, Be OSF, Xe Gamma, Xe OSF response: Shock location
14 Use observations and simulations for prediction in real world Have simulations from the CRASH code Have observations from laboratory experiments Want to combine these sources of data to make prediction of the real-world process... Also have to estimate the calibration parameters Additional complicating factor, the computer model is not an exact representation of the mean of the physical system darn! Approach: Model calibration (Kennedy and O Hagan, 2001; Higdon et al., 2004)
15 Model calibration Statistical formulation y s y f ( x,t) = η x,t ( ) ( x,θ) = η( x,θ) +δ( x) +ε Where, x model or system inputs; y f system response simulator response y s θ calibration parameters ε random error
16 Model calibration Statistical formulation y s y f ( x,t) = η x,t ( ) ( x,θ) = η( x,θ) +δ( x) +ε Shared signal
17 Model calibration Statistical formulation y s y f ( x,t) = η x,t ( ) ( x,θ) = η( x,θ) +δ( x) +ε Discrepancy
18 Model calibration Statistical formulation y s y f ( x,t) = η x,t ( ) ( x,θ) = η( x,θ) +δ( x) +ε Gaussian process models
19 Back to Gaussian process models y(x i )=µ + z(x i ) 2 z(x i ) N(0, z) cor ((z(x i ),z(x j )) = e 2 z(x) N(0 n, z R) 2 y(x) N(µ1 n, z R) P d k=1 k(x ik x jk ) 2
20 Gaussian process model for the emulator in this setting y s (x i,t i )=µ + z(x i,t i ) z(x i,t i ) N(0, 2 z) cor ((z(x i ),z(x j )) = e z(x, t) N(0 n, 2 z R) y(x, t) N(µ1 n, 2 z R) P d k=1 k(x ik x jk ) 2 P d 0 k=1! k(t ik t jk ) 2
21 Have Gaussian process model for the discrepancy (x i ) N(0, 2 ) P d k=1 k(x ik x jk ) 2 cor (( (x i ), (x j )) = e (x) N(0 m, 2 R )=N(0 m, )
22 Hierarchical model is used to combine simulations and observations View computational model as a draw of a random process (like before) Denote vectors of simulation trials as and field measurements as y s & y f Suppose that these are n and m- vectors respectively Can combine sources of information using a single GP y s y f " $ y = $ $ # ( x,t) = η x,t ( ) ( x,θ) = η( x,θ) +δ( x) +ε y s y f % ' ' ' & ~ N ( µ, Σ η + Σ δ + Σ ε )
23 Hierarchical model is used to combine simulations and observations View computational model as a draw of a random process Denote vectors of simulation trials as and field measurements as y s & y f Suppose that these are n and m- vectors respectively Can combine sources of information using a single GP y s y f " $ y = $ $ # ( x,t) = η x,t ( ) ( x,θ) = η( x,θ) +δ( x) +ε y s y f % ' ' ' & ~ N ( µ, Σ η + Σ δ + Σ ε ) Contains correlations between all sources of data via the joint signal in the computer model
24 Hierarchical model is used to combine simulations and observations View computational model as a draw of a random process Denote vectors of simulation trials as and field measurements as y s & y f Suppose that these are n and m- vectors respectively Can combine sources of information using a single GP y s y f " $ y = $ $ # ( x,t) = η x,t ( ) ( x,θ) = η( x,θ) +δ( x) +ε y s y f % ' ' ' & ~ N ( µ, Σ η + Σ δ + Σ ε ) Problem correlations involving field trials have t =
25 Hierarchical model is used to combine simulations and observations View computational model as a draw of a random process Denote vectors of simulation trials as and field measurements as y s & y f Suppose that these are n and m- vectors respectively Can combine sources of information using a single GP y s y f " $ y = $ $ # ( x,t) = η x,t ( ) ( x,θ) = η( x,θ) +δ( x) +ε y s y f % ' ' ' & ~ N ( µ, Σ η + Σ δ + Σ ε ) Only operates on the field data
26 Calibration idea: No discrepancy model (Plot taken shamelessly from Dave Higdon)
27 Calibration idea: Discrepancy model (Plot taken shamelessly from Dave Higdon) (a) model runs (b) data & prior uncertainty (c) posterior mean for!(x,t) 3!(x,t) 2 0!2 y(x),!(x,t) 2 1 0!1!(x,t) ! x 1 1 t 0.5 0! "! x x 1 1 t (d) calibrated simulator prediction (e) posterior model discrepancy (f) calibrated prediction y(x),!(x,") 1 0!1 #(x) 1 0!1 y(x), $(x) 1 0!1! "! x!2! x!2! x
28 Comments Interpretation of unknown constants can change Without discrepancy: estimating unknown physical constants With discrepancy: selecting tuning constants that best fit the model
29 Estimation What parameters do we have to estimate?
30 Estimation Can apply Bayes Rule: In the unbiased case for a fast simulator, For the simulators we have been considering, use an emulator in place of computer model basic idea [ ]! [ˆ, y s ] [A B] = [B A][A] [B] [, y f ] / [y f, ][ ][ ] Ignoring statistical model parameters for the moment [ ˆ, y f ] / [y f ˆ, ][ˆ, y s ][ ]
31 Estimation How could we put this together for the CRASH problem?
32 Back to CRASH Inverted-gamma priors for variance components Gamma priors for the correlation parameters Log-normal priors for the calibration parameters Samples from the posterior are generated through MCMC anyone know how to do this?
33 CRASH predictions
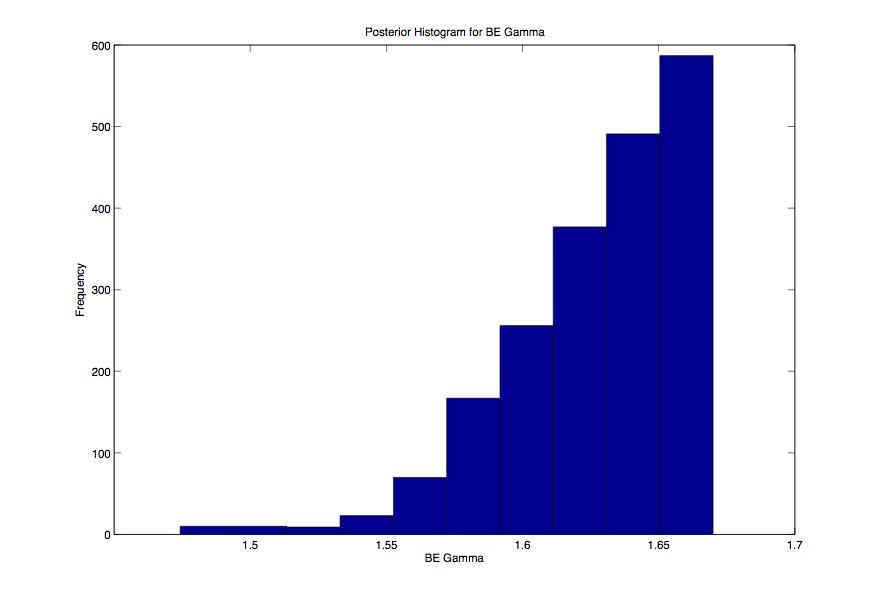
34 Calibration - BE Gamma
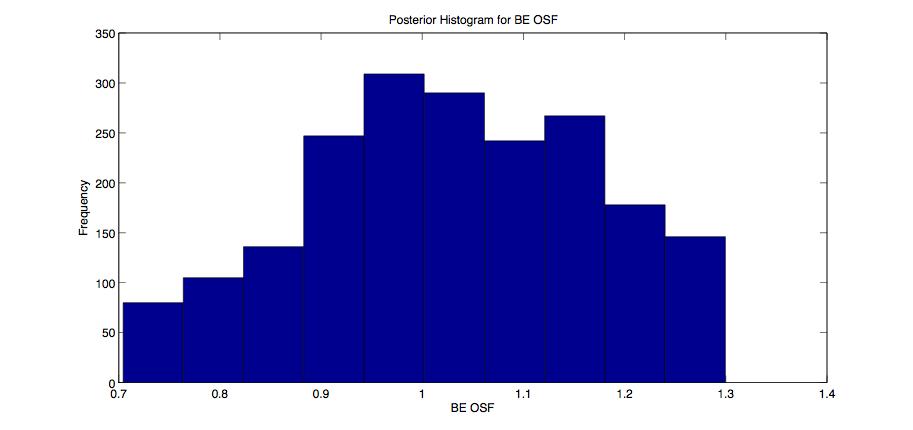
35 Calibration - BE OSF
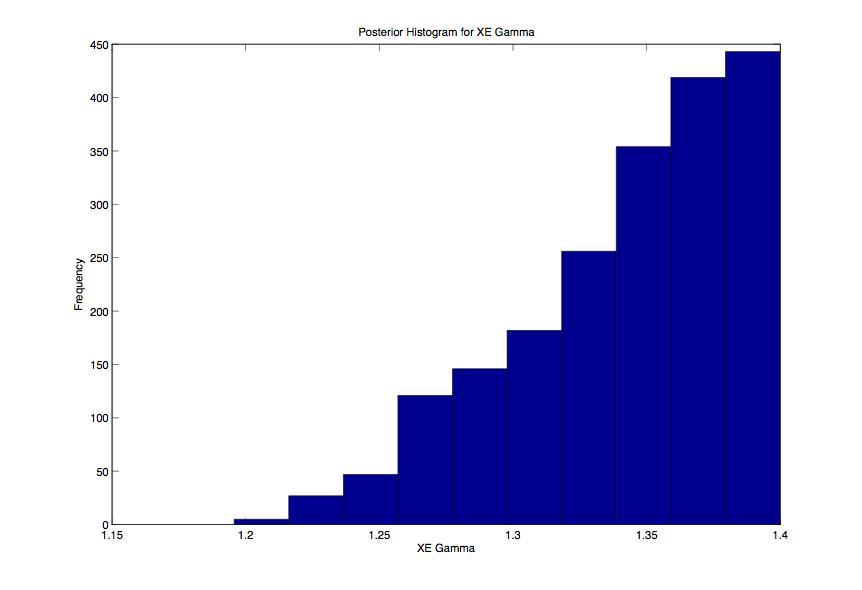
36 Calibration - XE Gamma
37 Calibration - XE OSF
38 Exploring the discrepancy The CRASH project was an ongoing endeavor Computer codes were being developed Idea is to use the statistical model to inform code development Predicted the discrepancy over a 4-d grid Used posterior mean surface

39 Discrepancy
40 Reasons for the discrepancy It was interesting that the discrepancy is always positive Incorrect radial loss of energy results in Xe that is too hot in front of the shock, and that systematically messes up the shock speed The region where the discrepancy is highest is thought to be the region where Xe pressure is largely going to impact Why might this be a crazy approach to explore the discrepancy?
An introduction to Bayesian statistics and model calibration and a host of related topics
 An introduction to Bayesian statistics and model calibration and a host of related topics Derek Bingham Statistics and Actuarial Science Simon Fraser University Cast of thousands have participated in the
An introduction to Bayesian statistics and model calibration and a host of related topics Derek Bingham Statistics and Actuarial Science Simon Fraser University Cast of thousands have participated in the
Quantifying Uncertainties in Radiation Hydrodynamics Models
 Krzysztof Fidkowski Department of Aerospace Engineering University of Michigan 1320 Beal Avenue, 3029 FXB Ann Arbor, MI 48109 USA kfid@umich.edu CRASH PIs: R.P. Drake, M.L. Adams, J.P. Holloway, K.G. Powell,
Krzysztof Fidkowski Department of Aerospace Engineering University of Michigan 1320 Beal Avenue, 3029 FXB Ann Arbor, MI 48109 USA kfid@umich.edu CRASH PIs: R.P. Drake, M.L. Adams, J.P. Holloway, K.G. Powell,
Calibration and validation of computer models for radiative shock experiment
 Calibration and validation of computer models for radiative shock experiment Jean Giorla 1, J. Garnier 2, E. Falize 1,3, B. Loupias 1, C. Busschaert 1,3, M. Koenig 4, A. Ravasio 4, C. Michaut 3 1 CEA/DAM/DIF,
Calibration and validation of computer models for radiative shock experiment Jean Giorla 1, J. Garnier 2, E. Falize 1,3, B. Loupias 1, C. Busschaert 1,3, M. Koenig 4, A. Ravasio 4, C. Michaut 3 1 CEA/DAM/DIF,
Validating Expensive Simulations with Expensive Experiments: A Bayesian Approach
 Validating Expensive Simulations with Expensive Experiments: A Bayesian Approach Dr. Arun Subramaniyan GE Global Research Center Niskayuna, NY 2012 ASME V& V Symposium Team: GE GRC: Liping Wang, Natarajan
Validating Expensive Simulations with Expensive Experiments: A Bayesian Approach Dr. Arun Subramaniyan GE Global Research Center Niskayuna, NY 2012 ASME V& V Symposium Team: GE GRC: Liping Wang, Natarajan
arxiv: v1 [stat.ap] 13 Aug 2012
![arxiv: v1 [stat.ap] 13 Aug 2012](/thumbs/90/104089316.jpg "arxiv: v1 [stat.ap] 13 Aug 2012") Prediction and Computer Model Calibration Using Outputs From Multi-fidelity Simulators arxiv:128.2716v1 [stat.ap] 13 Aug 212 Joslin Goh and Derek Bingham Department of Statistics and Actuarial Science
Prediction and Computer Model Calibration Using Outputs From Multi-fidelity Simulators arxiv:128.2716v1 [stat.ap] 13 Aug 212 Joslin Goh and Derek Bingham Department of Statistics and Actuarial Science
Uncertainty quantification and calibration of computer models. February 5th, 2014
 Uncertainty quantification and calibration of computer models February 5th, 2014 Physical model Physical model is defined by a set of differential equations. Now, they are usually described by computer
Uncertainty quantification and calibration of computer models February 5th, 2014 Physical model Physical model is defined by a set of differential equations. Now, they are usually described by computer
Efficiency and Reliability of Bayesian Calibration of Energy Supply System Models
 Efficiency and Reliability of Bayesian Calibration of Energy Supply System Models Kathrin Menberg 1,2, Yeonsook Heo 2, Ruchi Choudhary 1 1 University of Cambridge, Department of Engineering, Cambridge,
Efficiency and Reliability of Bayesian Calibration of Energy Supply System Models Kathrin Menberg 1,2, Yeonsook Heo 2, Ruchi Choudhary 1 1 University of Cambridge, Department of Engineering, Cambridge,
Uncertainty quantification for spatial field data using expensive computer models: refocussed Bayesian calibration with optimal projection
 University of Exeter Department of Mathematics Uncertainty quantification for spatial field data using expensive computer models: refocussed Bayesian calibration with optimal projection James Martin Salter
University of Exeter Department of Mathematics Uncertainty quantification for spatial field data using expensive computer models: refocussed Bayesian calibration with optimal projection James Martin Salter
Influence of an intensive UV preionization on evolution and EUV-emission of the laser plasma with Xe gas target (S12)
") Influence of an intensive UV preionization on evolution and EUV-emission of the laser plasma with Xe gas target (S12) 2013 Int. Workshop on EUV and Soft X-ray Sources UCD, Dublin, November 4-7, 2013 A.Garbaruk
Influence of an intensive UV preionization on evolution and EUV-emission of the laser plasma with Xe gas target (S12) 2013 Int. Workshop on EUV and Soft X-ray Sources UCD, Dublin, November 4-7, 2013 A.Garbaruk
Bayesian reconstruction of free energy profiles from umbrella samples
 Bayesian reconstruction of free energy profiles from umbrella samples Thomas Stecher with Gábor Csányi and Noam Bernstein 21st November 212 Motivation Motivation and Goals Many conventional methods implicitly
Bayesian reconstruction of free energy profiles from umbrella samples Thomas Stecher with Gábor Csányi and Noam Bernstein 21st November 212 Motivation Motivation and Goals Many conventional methods implicitly
Approximate Bayesian computation for spatial extremes via open-faced sandwich adjustment
 Approximate Bayesian computation for spatial extremes via open-faced sandwich adjustment Ben Shaby SAMSI August 3, 2010 Ben Shaby (SAMSI) OFS adjustment August 3, 2010 1 / 29 Outline 1 Introduction 2 Spatial
Approximate Bayesian computation for spatial extremes via open-faced sandwich adjustment Ben Shaby SAMSI August 3, 2010 Ben Shaby (SAMSI) OFS adjustment August 3, 2010 1 / 29 Outline 1 Introduction 2 Spatial
PARAMETER TUNING FOR A MULTI-FIDELITY DYNAMICAL MODEL OF THE MAGNETOSPHERE 1
 The Annals of Applied Statistics 2013, Vol. 7, No. 3, 1286 1310 DOI: 10.1214/13-AOAS651 Institute of Mathematical Statistics, 2013 PARAMETER TUNING FOR A MULTI-FIDELITY DYNAMICAL MODEL OF THE MAGNETOSPHERE
The Annals of Applied Statistics 2013, Vol. 7, No. 3, 1286 1310 DOI: 10.1214/13-AOAS651 Institute of Mathematical Statistics, 2013 PARAMETER TUNING FOR A MULTI-FIDELITY DYNAMICAL MODEL OF THE MAGNETOSPHERE
Part 6: Multivariate Normal and Linear Models
 Part 6: Multivariate Normal and Linear Models 1 Multiple measurements Up until now all of our statistical models have been univariate models models for a single measurement on each member of a sample of
Part 6: Multivariate Normal and Linear Models 1 Multiple measurements Up until now all of our statistical models have been univariate models models for a single measurement on each member of a sample of
Follow-Up Experimental Designs for Computer Models and Physical Processes
 This article was downloaded by: [Acadia University] On: 13 June 2012, At: 07:19 Publisher: Taylor & Francis Informa Ltd Registered in England and Wales Registered Number: 1072954 Registered office: Mortimer
This article was downloaded by: [Acadia University] On: 13 June 2012, At: 07:19 Publisher: Taylor & Francis Informa Ltd Registered in England and Wales Registered Number: 1072954 Registered office: Mortimer
Bayesian linear regression
 Bayesian linear regression Linear regression is the basis of most statistical modeling. The model is Y i = X T i β + ε i, where Y i is the continuous response X i = (X i1,..., X ip ) T is the corresponding
Bayesian linear regression Linear regression is the basis of most statistical modeling. The model is Y i = X T i β + ε i, where Y i is the continuous response X i = (X i1,..., X ip ) T is the corresponding
Challenges In Uncertainty, Calibration, Validation and Predictability of Engineering Analysis Models
 Challenges In Uncertainty, Calibration, Validation and Predictability of Engineering Analysis Models Dr. Liping Wang GE Global Research Manager, Probabilistics Lab Niskayuna, NY 2011 UQ Workshop University
Challenges In Uncertainty, Calibration, Validation and Predictability of Engineering Analysis Models Dr. Liping Wang GE Global Research Manager, Probabilistics Lab Niskayuna, NY 2011 UQ Workshop University
Why Study Magnetic Reconnection?
 Why Study Magnetic Reconnection? Fundamental Process Sun: Solar flares, Flare loops, CMEs Interplanetary Space Planetary Magnetosphere: solar wind plasma entry, causes Aurora Ultimate goal of the project
Why Study Magnetic Reconnection? Fundamental Process Sun: Solar flares, Flare loops, CMEs Interplanetary Space Planetary Magnetosphere: solar wind plasma entry, causes Aurora Ultimate goal of the project
A hierarchical Krylov-Bayes iterative inverse solver for MEG with physiological preconditioning
 A hierarchical Krylov-Bayes iterative inverse solver for MEG with physiological preconditioning D Calvetti 1 A Pascarella 3 F Pitolli 2 E Somersalo 1 B Vantaggi 2 1 Case Western Reserve University Department
A hierarchical Krylov-Bayes iterative inverse solver for MEG with physiological preconditioning D Calvetti 1 A Pascarella 3 F Pitolli 2 E Somersalo 1 B Vantaggi 2 1 Case Western Reserve University Department
Probability and Estimation. Alan Moses
 Probability and Estimation Alan Moses Random variables and probability A random variable is like a variable in algebra (e.g., y=e x ), but where at least part of the variability is taken to be stochastic.
Probability and Estimation Alan Moses Random variables and probability A random variable is like a variable in algebra (e.g., y=e x ), but where at least part of the variability is taken to be stochastic.
Bayesian Models in Machine Learning
 Bayesian Models in Machine Learning Lukáš Burget Escuela de Ciencias Informáticas 2017 Buenos Aires, July 24-29 2017 Frequentist vs. Bayesian Frequentist point of view: Probability is the frequency of
Bayesian Models in Machine Learning Lukáš Burget Escuela de Ciencias Informáticas 2017 Buenos Aires, July 24-29 2017 Frequentist vs. Bayesian Frequentist point of view: Probability is the frequency of
Exploring Astrophysical Magnetohydrodynamics Using High-power Laser Facilities
 Exploring Astrophysical Magnetohydrodynamics Using High-power Laser Facilities Mario Manuel Einstein Fellows Symposium Harvard-Smithsonian Center for Astrophysics October 28 th, 2014 Ø Collimation and
Exploring Astrophysical Magnetohydrodynamics Using High-power Laser Facilities Mario Manuel Einstein Fellows Symposium Harvard-Smithsonian Center for Astrophysics October 28 th, 2014 Ø Collimation and
Parameter Estimation. William H. Jefferys University of Texas at Austin Parameter Estimation 7/26/05 1
 Parameter Estimation William H. Jefferys University of Texas at Austin bill@bayesrules.net Parameter Estimation 7/26/05 1 Elements of Inference Inference problems contain two indispensable elements: Data
Parameter Estimation William H. Jefferys University of Texas at Austin bill@bayesrules.net Parameter Estimation 7/26/05 1 Elements of Inference Inference problems contain two indispensable elements: Data
Climate Change: the Uncertainty of Certainty
 Climate Change: the Uncertainty of Certainty Reinhard Furrer, UZH JSS, Geneva Oct. 30, 2009 Collaboration with: Stephan Sain - NCAR Reto Knutti - ETHZ Claudia Tebaldi - Climate Central Ryan Ford, Doug
Climate Change: the Uncertainty of Certainty Reinhard Furrer, UZH JSS, Geneva Oct. 30, 2009 Collaboration with: Stephan Sain - NCAR Reto Knutti - ETHZ Claudia Tebaldi - Climate Central Ryan Ford, Doug
Default Priors and Effcient Posterior Computation in Bayesian
 Default Priors and Effcient Posterior Computation in Bayesian Factor Analysis January 16, 2010 Presented by Eric Wang, Duke University Background and Motivation A Brief Review of Parameter Expansion Literature
Default Priors and Effcient Posterior Computation in Bayesian Factor Analysis January 16, 2010 Presented by Eric Wang, Duke University Background and Motivation A Brief Review of Parameter Expansion Literature
Prior information, but no MCMC:
 Physikalisch-Technische Bundesanstalt Braunschweig and Berlin National Metrology Institute Prior information, but no MCMC: A Bayesian Normal linear regression case study K. Klauenberg, G. Wübbeler, B.
Physikalisch-Technische Bundesanstalt Braunschweig and Berlin National Metrology Institute Prior information, but no MCMC: A Bayesian Normal linear regression case study K. Klauenberg, G. Wübbeler, B.
Gaussian Processes for Computer Experiments
 Gaussian Processes for Computer Experiments Jeremy Oakley School of Mathematics and Statistics, University of Sheffield www.jeremy-oakley.staff.shef.ac.uk 1 / 43 Computer models Computer model represented
Gaussian Processes for Computer Experiments Jeremy Oakley School of Mathematics and Statistics, University of Sheffield www.jeremy-oakley.staff.shef.ac.uk 1 / 43 Computer models Computer model represented
Naïve Bayes classification
 Naïve Bayes classification 1 Probability theory Random variable: a variable whose possible values are numerical outcomes of a random phenomenon. Examples: A person s height, the outcome of a coin toss
Naïve Bayes classification 1 Probability theory Random variable: a variable whose possible values are numerical outcomes of a random phenomenon. Examples: A person s height, the outcome of a coin toss
PREDICTING SOLAR GENERATION FROM WEATHER FORECASTS. Chenlin Wu Yuhan Lou
 PREDICTING SOLAR GENERATION FROM WEATHER FORECASTS Chenlin Wu Yuhan Lou Background Smart grid: increasing the contribution of renewable in grid energy Solar generation: intermittent and nondispatchable
PREDICTING SOLAR GENERATION FROM WEATHER FORECASTS Chenlin Wu Yuhan Lou Background Smart grid: increasing the contribution of renewable in grid energy Solar generation: intermittent and nondispatchable
Annals of Nuclear Energy
 Annals of Nuclear Energy 52 (213) 13 112 Contents lists available at SciVerse ScienceDirect Annals of Nuclear Energy journal homepage: www.elsevier.com/locate/anucene A calibration and data assimilation
Annals of Nuclear Energy 52 (213) 13 112 Contents lists available at SciVerse ScienceDirect Annals of Nuclear Energy journal homepage: www.elsevier.com/locate/anucene A calibration and data assimilation
Bayesian Analysis of RR Lyrae Distances and Kinematics
 Bayesian Analysis of RR Lyrae Distances and Kinematics William H. Jefferys, Thomas R. Jefferys and Thomas G. Barnes University of Texas at Austin, USA Thanks to: Jim Berger, Peter Müller, Charles Friedman
Bayesian Analysis of RR Lyrae Distances and Kinematics William H. Jefferys, Thomas R. Jefferys and Thomas G. Barnes University of Texas at Austin, USA Thanks to: Jim Berger, Peter Müller, Charles Friedman
Bayesian Inference and MCMC
 Bayesian Inference and MCMC Aryan Arbabi Partly based on MCMC slides from CSC412 Fall 2018 1 / 18 Bayesian Inference - Motivation Consider we have a data set D = {x 1,..., x n }. E.g each x i can be the
Bayesian Inference and MCMC Aryan Arbabi Partly based on MCMC slides from CSC412 Fall 2018 1 / 18 Bayesian Inference - Motivation Consider we have a data set D = {x 1,..., x n }. E.g each x i can be the
MATH c UNIVERSITY OF LEEDS Examination for the Module MATH2715 (January 2015) STATISTICAL METHODS. Time allowed: 2 hours
 STATISTICAL METHODS. Time allowed: 2 hours") MATH2750 This question paper consists of 8 printed pages, each of which is identified by the reference MATH275. All calculators must carry an approval sticker issued by the School of Mathematics. c UNIVERSITY
MATH2750 This question paper consists of 8 printed pages, each of which is identified by the reference MATH275. All calculators must carry an approval sticker issued by the School of Mathematics. c UNIVERSITY
Bayesian Dynamic Linear Modelling for. Complex Computer Models
 Bayesian Dynamic Linear Modelling for Complex Computer Models Fei Liu, Liang Zhang, Mike West Abstract Computer models may have functional outputs. With no loss of generality, we assume that a single computer
Bayesian Dynamic Linear Modelling for Complex Computer Models Fei Liu, Liang Zhang, Mike West Abstract Computer models may have functional outputs. With no loss of generality, we assume that a single computer
Integrated Bayesian Experimental Design
 Integrated Bayesian Experimental Design R. Fischer, H. Dreier, A. Dinklage, B. Kurzan and E. Pasch Max-Planck-Institut für Plasmaphysik, EURATOM Association, Boltzmannstr. 2, 85 748 Garching, Germany Max-Planck-Institut
Integrated Bayesian Experimental Design R. Fischer, H. Dreier, A. Dinklage, B. Kurzan and E. Pasch Max-Planck-Institut für Plasmaphysik, EURATOM Association, Boltzmannstr. 2, 85 748 Garching, Germany Max-Planck-Institut
Bayesian Regression Linear and Logistic Regression
 When we want more than point estimates Bayesian Regression Linear and Logistic Regression Nicole Beckage Ordinary Least Squares Regression and Lasso Regression return only point estimates But what if we
When we want more than point estimates Bayesian Regression Linear and Logistic Regression Nicole Beckage Ordinary Least Squares Regression and Lasso Regression return only point estimates But what if we
GAUSSIAN PROCESS REGRESSION
 GAUSSIAN PROCESS REGRESSION CSE 515T Spring 2015 1. BACKGROUND The kernel trick again... The Kernel Trick Consider again the linear regression model: y(x) = φ(x) w + ε, with prior p(w) = N (w; 0, Σ). The
GAUSSIAN PROCESS REGRESSION CSE 515T Spring 2015 1. BACKGROUND The kernel trick again... The Kernel Trick Consider again the linear regression model: y(x) = φ(x) w + ε, with prior p(w) = N (w; 0, Σ). The
Hierarchical Bayesian Modeling of Planet Populations. Angie Wolfgang NSF Postdoctoral Fellow, Penn State
 Hierarchical Bayesian Modeling of Planet Populations Angie Wolfgang NSF Postdoctoral Fellow, Penn State The Big Picture We ve found > 3000 planets, and counting. Earth s place in the Universe... We re
Hierarchical Bayesian Modeling of Planet Populations Angie Wolfgang NSF Postdoctoral Fellow, Penn State The Big Picture We ve found > 3000 planets, and counting. Earth s place in the Universe... We re
Principles of Bayesian Inference
 Principles of Bayesian Inference Sudipto Banerjee University of Minnesota July 20th, 2008 1 Bayesian Principles Classical statistics: model parameters are fixed and unknown. A Bayesian thinks of parameters
Principles of Bayesian Inference Sudipto Banerjee University of Minnesota July 20th, 2008 1 Bayesian Principles Classical statistics: model parameters are fixed and unknown. A Bayesian thinks of parameters
Motivation Scale Mixutres of Normals Finite Gaussian Mixtures Skew-Normal Models. Mixture Models. Econ 690. Purdue University
 Econ 690 Purdue University In virtually all of the previous lectures, our models have made use of normality assumptions. From a computational point of view, the reason for this assumption is clear: combined
Econ 690 Purdue University In virtually all of the previous lectures, our models have made use of normality assumptions. From a computational point of view, the reason for this assumption is clear: combined
Introduction to Gaussian Processes
 Introduction to Gaussian Processes Iain Murray murray@cs.toronto.edu CSC255, Introduction to Machine Learning, Fall 28 Dept. Computer Science, University of Toronto The problem Learn scalar function of
Introduction to Gaussian Processes Iain Murray murray@cs.toronto.edu CSC255, Introduction to Machine Learning, Fall 28 Dept. Computer Science, University of Toronto The problem Learn scalar function of
PILCO: A Model-Based and Data-Efficient Approach to Policy Search
 PILCO: A Model-Based and Data-Efficient Approach to Policy Search (M.P. Deisenroth and C.E. Rasmussen) CSC2541 November 4, 2016 PILCO Graphical Model PILCO Probabilistic Inference for Learning COntrol
PILCO: A Model-Based and Data-Efficient Approach to Policy Search (M.P. Deisenroth and C.E. Rasmussen) CSC2541 November 4, 2016 PILCO Graphical Model PILCO Probabilistic Inference for Learning COntrol
Principles of Bayesian Inference
 Principles of Bayesian Inference Sudipto Banerjee and Andrew O. Finley 2 Biostatistics, School of Public Health, University of Minnesota, Minneapolis, Minnesota, U.S.A. 2 Department of Forestry & Department
Principles of Bayesian Inference Sudipto Banerjee and Andrew O. Finley 2 Biostatistics, School of Public Health, University of Minnesota, Minneapolis, Minnesota, U.S.A. 2 Department of Forestry & Department
Estimation of reliability parameters from Experimental data (Parte 2) Prof. Enrico Zio
 Prof. Enrico Zio") Estimation of reliability parameters from Experimental data (Parte 2) This lecture Life test (t 1,t 2,...,t n ) Estimate θ of f T t θ For example: λ of f T (t)= λe - λt Classical approach (frequentist
Estimation of reliability parameters from Experimental data (Parte 2) This lecture Life test (t 1,t 2,...,t n ) Estimate θ of f T t θ For example: λ of f T (t)= λe - λt Classical approach (frequentist
Visualization of Xe and Sn Atoms Generated from Laser-Produced Plasma for EUV Light Source
 3rd International EUVL Symposium NOVEMBER 1-4, 2004 Miyazaki, Japan Visualization of Xe and Sn Atoms Generated from Laser-Produced Plasma for EUV Light Source H. Tanaka, A. Matsumoto, K. Akinaga, A. Takahashi
3rd International EUVL Symposium NOVEMBER 1-4, 2004 Miyazaki, Japan Visualization of Xe and Sn Atoms Generated from Laser-Produced Plasma for EUV Light Source H. Tanaka, A. Matsumoto, K. Akinaga, A. Takahashi
Gaussian with mean ( µ ) and standard deviation ( σ)
 and standard deviation ( σ)") Slide from Pieter Abbeel Gaussian with mean ( µ ) and standard deviation ( σ) 10/6/16 CSE-571: Robotics X ~ N( µ, σ ) Y ~ N( aµ + b, a σ ) Y = ax + b + + + + 1 1 1 1 1 1 1 1 1 1, ~ ) ( ) ( ), ( ~ ), (
Slide from Pieter Abbeel Gaussian with mean ( µ ) and standard deviation ( σ) 10/6/16 CSE-571: Robotics X ~ N( µ, σ ) Y ~ N( aµ + b, a σ ) Y = ax + b + + + + 1 1 1 1 1 1 1 1 1 1, ~ ) ( ) ( ), ( ~ ), (
Statistical Tools and Techniques for Solar Astronomers
 Statistical Tools and Techniques for Solar Astronomers Alexander W Blocker Nathan Stein SolarStat 2012 Outline Outline 1 Introduction & Objectives 2 Statistical issues with astronomical data 3 Example:
Statistical Tools and Techniques for Solar Astronomers Alexander W Blocker Nathan Stein SolarStat 2012 Outline Outline 1 Introduction & Objectives 2 Statistical issues with astronomical data 3 Example:
Principles of Bayesian Inference
 Principles of Bayesian Inference Sudipto Banerjee 1 and Andrew O. Finley 2 1 Biostatistics, School of Public Health, University of Minnesota, Minneapolis, Minnesota, U.S.A. 2 Department of Forestry & Department
Principles of Bayesian Inference Sudipto Banerjee 1 and Andrew O. Finley 2 1 Biostatistics, School of Public Health, University of Minnesota, Minneapolis, Minnesota, U.S.A. 2 Department of Forestry & Department
Bayesian Methods for Machine Learning
 Bayesian Methods for Machine Learning CS 584: Big Data Analytics Material adapted from Radford Neal s tutorial (http://ftp.cs.utoronto.ca/pub/radford/bayes-tut.pdf), Zoubin Ghahramni (http://hunch.net/~coms-4771/zoubin_ghahramani_bayesian_learning.pdf),
Bayesian Methods for Machine Learning CS 584: Big Data Analytics Material adapted from Radford Neal s tutorial (http://ftp.cs.utoronto.ca/pub/radford/bayes-tut.pdf), Zoubin Ghahramni (http://hunch.net/~coms-4771/zoubin_ghahramani_bayesian_learning.pdf),
Bayesian Calibration of Simulators with Structured Discretization Uncertainty
 Bayesian Calibration of Simulators with Structured Discretization Uncertainty Oksana A. Chkrebtii Department of Statistics, The Ohio State University Joint work with Matthew T. Pratola (Statistics, The
Bayesian Calibration of Simulators with Structured Discretization Uncertainty Oksana A. Chkrebtii Department of Statistics, The Ohio State University Joint work with Matthew T. Pratola (Statistics, The
Bayesian Regression (1/31/13)
") STA613/CBB540: Statistical methods in computational biology Bayesian Regression (1/31/13) Lecturer: Barbara Engelhardt Scribe: Amanda Lea 1 Bayesian Paradigm Bayesian methods ask: given that I have observed
STA613/CBB540: Statistical methods in computational biology Bayesian Regression (1/31/13) Lecturer: Barbara Engelhardt Scribe: Amanda Lea 1 Bayesian Paradigm Bayesian methods ask: given that I have observed
Introduction to Bayesian Statistics with WinBUGS Part 4 Priors and Hierarchical Models
 Introduction to Bayesian Statistics with WinBUGS Part 4 Priors and Hierarchical Models Matthew S. Johnson New York ASA Chapter Workshop CUNY Graduate Center New York, NY hspace1in December 17, 2009 December
Introduction to Bayesian Statistics with WinBUGS Part 4 Priors and Hierarchical Models Matthew S. Johnson New York ASA Chapter Workshop CUNY Graduate Center New York, NY hspace1in December 17, 2009 December
Plausible Values for Latent Variables Using Mplus
 Plausible Values for Latent Variables Using Mplus Tihomir Asparouhov and Bengt Muthén August 21, 2010 1 1 Introduction Plausible values are imputed values for latent variables. All latent variables can
Plausible Values for Latent Variables Using Mplus Tihomir Asparouhov and Bengt Muthén August 21, 2010 1 1 Introduction Plausible values are imputed values for latent variables. All latent variables can
Naïve Bayes classification. p ij 11/15/16. Probability theory. Probability theory. Probability theory. X P (X = x i )=1 i. Marginal Probability
=1 i. Marginal Probability") Probability theory Naïve Bayes classification Random variable: a variable whose possible values are numerical outcomes of a random phenomenon. s: A person s height, the outcome of a coin toss Distinguish
Probability theory Naïve Bayes classification Random variable: a variable whose possible values are numerical outcomes of a random phenomenon. s: A person s height, the outcome of a coin toss Distinguish
Non-Parametric Bayes
 Non-Parametric Bayes Mark Schmidt UBC Machine Learning Reading Group January 2016 Current Hot Topics in Machine Learning Bayesian learning includes: Gaussian processes. Approximate inference. Bayesian
Non-Parametric Bayes Mark Schmidt UBC Machine Learning Reading Group January 2016 Current Hot Topics in Machine Learning Bayesian learning includes: Gaussian processes. Approximate inference. Bayesian
Primer on statistics:
 Primer on statistics: MLE, Confidence Intervals, and Hypothesis Testing ryan.reece@gmail.com http://rreece.github.io/ Insight Data Science - AI Fellows Workshop Feb 16, 018 Outline 1. Maximum likelihood
Primer on statistics: MLE, Confidence Intervals, and Hypothesis Testing ryan.reece@gmail.com http://rreece.github.io/ Insight Data Science - AI Fellows Workshop Feb 16, 018 Outline 1. Maximum likelihood
Bayesian data analysis in practice: Three simple examples
 Bayesian data analysis in practice: Three simple examples Martin P. Tingley Introduction These notes cover three examples I presented at Climatea on 5 October 0. Matlab code is available by request to
Bayesian data analysis in practice: Three simple examples Martin P. Tingley Introduction These notes cover three examples I presented at Climatea on 5 October 0. Matlab code is available by request to
(5) Multi-parameter models - Gibbs sampling. ST440/540: Applied Bayesian Analysis
 Multi-parameter models - Gibbs sampling. ST440/540: Applied Bayesian Analysis") Summarizing a posterior Given the data and prior the posterior is determined Summarizing the posterior gives parameter estimates, intervals, and hypothesis tests Most of these computations are integrals
Summarizing a posterior Given the data and prior the posterior is determined Summarizing the posterior gives parameter estimates, intervals, and hypothesis tests Most of these computations are integrals
STATISTICAL MODELS FOR QUANTIFYING THE SPATIAL DISTRIBUTION OF SEASONALLY DERIVED OZONE STANDARDS
 STATISTICAL MODELS FOR QUANTIFYING THE SPATIAL DISTRIBUTION OF SEASONALLY DERIVED OZONE STANDARDS Eric Gilleland Douglas Nychka Geophysical Statistics Project National Center for Atmospheric Research Supported
STATISTICAL MODELS FOR QUANTIFYING THE SPATIAL DISTRIBUTION OF SEASONALLY DERIVED OZONE STANDARDS Eric Gilleland Douglas Nychka Geophysical Statistics Project National Center for Atmospheric Research Supported
Lecture 2: From Linear Regression to Kalman Filter and Beyond
 Lecture 2: From Linear Regression to Kalman Filter and Beyond January 18, 2017 Contents 1 Batch and Recursive Estimation 2 Towards Bayesian Filtering 3 Kalman Filter and Bayesian Filtering and Smoothing
Lecture 2: From Linear Regression to Kalman Filter and Beyond January 18, 2017 Contents 1 Batch and Recursive Estimation 2 Towards Bayesian Filtering 3 Kalman Filter and Bayesian Filtering and Smoothing
Point spread function reconstruction from the image of a sharp edge
 DOE/NV/5946--49 Point spread function reconstruction from the image of a sharp edge John Bardsley, Kevin Joyce, Aaron Luttman The University of Montana National Security Technologies LLC Montana Uncertainty
DOE/NV/5946--49 Point spread function reconstruction from the image of a sharp edge John Bardsley, Kevin Joyce, Aaron Luttman The University of Montana National Security Technologies LLC Montana Uncertainty
Learning about physical parameters: The importance of model discrepancy
 Learning about physical parameters: The importance of model discrepancy Jenný Brynjarsdóttir 1 and Anthony O Hagan 2 June 9, 2014 Abstract Science-based simulation models are widely used to predict the
Learning about physical parameters: The importance of model discrepancy Jenný Brynjarsdóttir 1 and Anthony O Hagan 2 June 9, 2014 Abstract Science-based simulation models are widely used to predict the
Lecture 4: Dynamic models
 linear s Lecture 4: s Hedibert Freitas Lopes The University of Chicago Booth School of Business 5807 South Woodlawn Avenue, Chicago, IL 60637 http://faculty.chicagobooth.edu/hedibert.lopes hlopes@chicagobooth.edu
linear s Lecture 4: s Hedibert Freitas Lopes The University of Chicago Booth School of Business 5807 South Woodlawn Avenue, Chicago, IL 60637 http://faculty.chicagobooth.edu/hedibert.lopes hlopes@chicagobooth.edu
Adaptive Data Assimilation and Multi-Model Fusion
 Adaptive Data Assimilation and Multi-Model Fusion Pierre F.J. Lermusiaux, Oleg G. Logoutov and Patrick J. Haley Jr. Mechanical Engineering and Ocean Science and Engineering, MIT We thank: Allan R. Robinson
Adaptive Data Assimilation and Multi-Model Fusion Pierre F.J. Lermusiaux, Oleg G. Logoutov and Patrick J. Haley Jr. Mechanical Engineering and Ocean Science and Engineering, MIT We thank: Allan R. Robinson
Introduction to Gaussian Processes
 Introduction to Gaussian Processes 1 Objectives to express prior knowledge/beliefs about model outputs using Gaussian process (GP) to sample functions from the probability measure defined by GP to build
Introduction to Gaussian Processes 1 Objectives to express prior knowledge/beliefs about model outputs using Gaussian process (GP) to sample functions from the probability measure defined by GP to build
DRAGON ADVANCED TRAINING COURSE IN ATMOSPHERE REMOTE SENSING. Inversion basics. Erkki Kyrölä Finnish Meteorological Institute
 Inversion basics y = Kx + ε x ˆ = (K T K) 1 K T y Erkki Kyrölä Finnish Meteorological Institute Day 3 Lecture 1 Retrieval techniques - Erkki Kyrölä 1 Contents 1. Introduction: Measurements, models, inversion
Inversion basics y = Kx + ε x ˆ = (K T K) 1 K T y Erkki Kyrölä Finnish Meteorological Institute Day 3 Lecture 1 Retrieval techniques - Erkki Kyrölä 1 Contents 1. Introduction: Measurements, models, inversion
Parameter Estimation in the Spatio-Temporal Mixed Effects Model Analysis of Massive Spatio-Temporal Data Sets
 Parameter Estimation in the Spatio-Temporal Mixed Effects Model Analysis of Massive Spatio-Temporal Data Sets Matthias Katzfuß Advisor: Dr. Noel Cressie Department of Statistics The Ohio State University
Parameter Estimation in the Spatio-Temporal Mixed Effects Model Analysis of Massive Spatio-Temporal Data Sets Matthias Katzfuß Advisor: Dr. Noel Cressie Department of Statistics The Ohio State University
Using a Relativistic Electron Beam to Generate Warm Dense Matter for Equation of State Studies
 Using a Relativistic Electron Beam to Generate Warm Dense Matter for Equation of State Studies DOE/NV/25946--1257 M. J. Berninger National Security Technologies, LLC, Los Alamos, NM 87544 T. J. T. Kwan,
Using a Relativistic Electron Beam to Generate Warm Dense Matter for Equation of State Studies DOE/NV/25946--1257 M. J. Berninger National Security Technologies, LLC, Los Alamos, NM 87544 T. J. T. Kwan,
Chapter 8: Sampling distributions of estimators Sections
 Chapter 8: Sampling distributions of estimators Sections 8.1 Sampling distribution of a statistic 8.2 The Chi-square distributions 8.3 Joint Distribution of the sample mean and sample variance Skip: p.
Chapter 8: Sampling distributions of estimators Sections 8.1 Sampling distribution of a statistic 8.2 The Chi-square distributions 8.3 Joint Distribution of the sample mean and sample variance Skip: p.
Bayesian Inference. Chapter 4: Regression and Hierarchical Models
 Bayesian Inference Chapter 4: Regression and Hierarchical Models Conchi Ausín and Mike Wiper Department of Statistics Universidad Carlos III de Madrid Advanced Statistics and Data Mining Summer School
Bayesian Inference Chapter 4: Regression and Hierarchical Models Conchi Ausín and Mike Wiper Department of Statistics Universidad Carlos III de Madrid Advanced Statistics and Data Mining Summer School
Gaussian processes. Chuong B. Do (updated by Honglak Lee) November 22, 2008
 November 22, 2008") Gaussian processes Chuong B Do (updated by Honglak Lee) November 22, 2008 Many of the classical machine learning algorithms that we talked about during the first half of this course fit the following pattern:
Gaussian processes Chuong B Do (updated by Honglak Lee) November 22, 2008 Many of the classical machine learning algorithms that we talked about during the first half of this course fit the following pattern:
Sampling and incomplete network data
 1/58 Sampling and incomplete network data 567 Statistical analysis of social networks Peter Hoff Statistics, University of Washington 2/58 Network sampling methods It is sometimes difficult to obtain a
1/58 Sampling and incomplete network data 567 Statistical analysis of social networks Peter Hoff Statistics, University of Washington 2/58 Network sampling methods It is sometimes difficult to obtain a
Parametric Techniques Lecture 3
 Parametric Techniques Lecture 3 Jason Corso SUNY at Buffalo 22 January 2009 J. Corso (SUNY at Buffalo) Parametric Techniques Lecture 3 22 January 2009 1 / 39 Introduction In Lecture 2, we learned how to
Parametric Techniques Lecture 3 Jason Corso SUNY at Buffalo 22 January 2009 J. Corso (SUNY at Buffalo) Parametric Techniques Lecture 3 22 January 2009 1 / 39 Introduction In Lecture 2, we learned how to
Advanced Statistical Methods. Lecture 6
 Advanced Statistical Methods Lecture 6 Convergence distribution of M.-H. MCMC We denote the PDF estimated by the MCMC as. It has the property Convergence distribution After some time, the distribution
Advanced Statistical Methods Lecture 6 Convergence distribution of M.-H. MCMC We denote the PDF estimated by the MCMC as. It has the property Convergence distribution After some time, the distribution
Bayesian dynamic modeling for large space-time weather datasets using Gaussian predictive processes
 Bayesian dynamic modeling for large space-time weather datasets using Gaussian predictive processes Alan Gelfand 1 and Andrew O. Finley 2 1 Department of Statistical Science, Duke University, Durham, North
Bayesian dynamic modeling for large space-time weather datasets using Gaussian predictive processes Alan Gelfand 1 and Andrew O. Finley 2 1 Department of Statistical Science, Duke University, Durham, North
Advanced Machine Learning
 Advanced Machine Learning Nonparametric Bayesian Models --Learning/Reasoning in Open Possible Worlds Eric Xing Lecture 7, August 4, 2009 Reading: Eric Xing Eric Xing @ CMU, 2006-2009 Clustering Eric Xing
Advanced Machine Learning Nonparametric Bayesian Models --Learning/Reasoning in Open Possible Worlds Eric Xing Lecture 7, August 4, 2009 Reading: Eric Xing Eric Xing @ CMU, 2006-2009 Clustering Eric Xing
Multi-fidelity co-kriging models
 Application to Sequential design Loic Le Gratiet 12, Claire Cannamela 3 1 EDF R&D, Chatou, France 2 UNS CNRS, 69 Sophia Antipolis, France 3 CEA, DAM, DIF, F-91297 Arpajon, France ANR CHORUS April 3, 214
Application to Sequential design Loic Le Gratiet 12, Claire Cannamela 3 1 EDF R&D, Chatou, France 2 UNS CNRS, 69 Sophia Antipolis, France 3 CEA, DAM, DIF, F-91297 Arpajon, France ANR CHORUS April 3, 214
Theory of Maximum Likelihood Estimation. Konstantin Kashin
 Gov 2001 Section 5: Theory of Maximum Likelihood Estimation Konstantin Kashin February 28, 2013 Outline Introduction Likelihood Examples of MLE Variance of MLE Asymptotic Properties What is Statistical
Gov 2001 Section 5: Theory of Maximum Likelihood Estimation Konstantin Kashin February 28, 2013 Outline Introduction Likelihood Examples of MLE Variance of MLE Asymptotic Properties What is Statistical
Statistical Techniques in Robotics (16-831, F12) Lecture#21 (Monday November 12) Gaussian Processes
 Lecture#21 (Monday November 12) Gaussian Processes") Statistical Techniques in Robotics (16-831, F12) Lecture#21 (Monday November 12) Gaussian Processes Lecturer: Drew Bagnell Scribe: Venkatraman Narayanan 1, M. Koval and P. Parashar 1 Applications of Gaussian
Statistical Techniques in Robotics (16-831, F12) Lecture#21 (Monday November 12) Gaussian Processes Lecturer: Drew Bagnell Scribe: Venkatraman Narayanan 1, M. Koval and P. Parashar 1 Applications of Gaussian
Model comparison. Christopher A. Sims Princeton University October 18, 2016
 ECO 513 Fall 2008 Model comparison Christopher A. Sims Princeton University sims@princeton.edu October 18, 2016 c 2016 by Christopher A. Sims. This document may be reproduced for educational and research
ECO 513 Fall 2008 Model comparison Christopher A. Sims Princeton University sims@princeton.edu October 18, 2016 c 2016 by Christopher A. Sims. This document may be reproduced for educational and research
Tracking properties of the ATLAS Transition Radiation Tracker (TRT)
") 2 racking properties of the ALAS ransition Radiation racker (R) 3 4 5 6 D V Krasnopevtsev on behalf of ALAS R collaboration National Research Nuclear University MEPhI (Moscow Engineering Physics Institute),
2 racking properties of the ALAS ransition Radiation racker (R) 3 4 5 6 D V Krasnopevtsev on behalf of ALAS R collaboration National Research Nuclear University MEPhI (Moscow Engineering Physics Institute),
Statistical Techniques in Robotics (16-831, F12) Lecture#20 (Monday November 12) Gaussian Processes
 Lecture#20 (Monday November 12) Gaussian Processes") Statistical Techniques in Robotics (6-83, F) Lecture# (Monday November ) Gaussian Processes Lecturer: Drew Bagnell Scribe: Venkatraman Narayanan Applications of Gaussian Processes (a) Inverse Kinematics
Statistical Techniques in Robotics (6-83, F) Lecture# (Monday November ) Gaussian Processes Lecturer: Drew Bagnell Scribe: Venkatraman Narayanan Applications of Gaussian Processes (a) Inverse Kinematics
Classical and Bayesian inference
 Classical and Bayesian inference AMS 132 Claudia Wehrhahn (UCSC) Classical and Bayesian inference January 8 1 / 11 The Prior Distribution Definition Suppose that one has a statistical model with parameter
Classical and Bayesian inference AMS 132 Claudia Wehrhahn (UCSC) Classical and Bayesian inference January 8 1 / 11 The Prior Distribution Definition Suppose that one has a statistical model with parameter
Parametric Techniques
 Parametric Techniques Jason J. Corso SUNY at Buffalo J. Corso (SUNY at Buffalo) Parametric Techniques 1 / 39 Introduction When covering Bayesian Decision Theory, we assumed the full probabilistic structure
Parametric Techniques Jason J. Corso SUNY at Buffalo J. Corso (SUNY at Buffalo) Parametric Techniques 1 / 39 Introduction When covering Bayesian Decision Theory, we assumed the full probabilistic structure
Bayesian Gaussian Process Regression
 Bayesian Gaussian Process Regression STAT8810, Fall 2017 M.T. Pratola October 7, 2017 Today Bayesian Gaussian Process Regression Bayesian GP Regression Recall we had observations from our expensive simulator,
Bayesian Gaussian Process Regression STAT8810, Fall 2017 M.T. Pratola October 7, 2017 Today Bayesian Gaussian Process Regression Bayesian GP Regression Recall we had observations from our expensive simulator,
Using training sets and SVD to separate global 21-cm signal from foreground and instrument systematics
 Using training sets and SVD to separate global 21-cm signal from foreground and instrument systematics KEITH TAUSCHER*, DAVID RAPETTI, JACK O. BURNS, ERIC SWITZER Aspen, CO Cosmological Signals from Cosmic
Using training sets and SVD to separate global 21-cm signal from foreground and instrument systematics KEITH TAUSCHER*, DAVID RAPETTI, JACK O. BURNS, ERIC SWITZER Aspen, CO Cosmological Signals from Cosmic
SURROGATE PREPOSTERIOR ANALYSES FOR PREDICTING AND ENHANCING IDENTIFIABILITY IN MODEL CALIBRATION
 International Journal for Uncertainty Quantification, ():xxx xxx, 0 SURROGATE PREPOSTERIOR ANALYSES FOR PREDICTING AND ENHANCING IDENTIFIABILITY IN MODEL CALIBRATION Zhen Jiang, Daniel W. Apley, & Wei
International Journal for Uncertainty Quantification, ():xxx xxx, 0 SURROGATE PREPOSTERIOR ANALYSES FOR PREDICTING AND ENHANCING IDENTIFIABILITY IN MODEL CALIBRATION Zhen Jiang, Daniel W. Apley, & Wei
Data Assimilation: Finding the Initial Conditions in Large Dynamical Systems. Eric Kostelich Data Mining Seminar, Feb. 6, 2006
 Data Assimilation: Finding the Initial Conditions in Large Dynamical Systems Eric Kostelich Data Mining Seminar, Feb. 6, 2006 kostelich@asu.edu Co-Workers Istvan Szunyogh, Gyorgyi Gyarmati, Ed Ott, Brian
Data Assimilation: Finding the Initial Conditions in Large Dynamical Systems Eric Kostelich Data Mining Seminar, Feb. 6, 2006 kostelich@asu.edu Co-Workers Istvan Szunyogh, Gyorgyi Gyarmati, Ed Ott, Brian
David Giles Bayesian Econometrics
 David Giles Bayesian Econometrics 1. General Background 2. Constructing Prior Distributions 3. Properties of Bayes Estimators and Tests 4. Bayesian Analysis of the Multiple Regression Model 5. Bayesian
David Giles Bayesian Econometrics 1. General Background 2. Constructing Prior Distributions 3. Properties of Bayes Estimators and Tests 4. Bayesian Analysis of the Multiple Regression Model 5. Bayesian
Problem set: solar irradiance and solar wind
 Problem set: solar irradiance and solar wind Karel Schrijver July 3, 203 Stratification of a static atmosphere within a force-free magnetic field Problem: Write down the general MHD force-balance equation
Problem set: solar irradiance and solar wind Karel Schrijver July 3, 203 Stratification of a static atmosphere within a force-free magnetic field Problem: Write down the general MHD force-balance equation
Outline. Binomial, Multinomial, Normal, Beta, Dirichlet. Posterior mean, MAP, credible interval, posterior distribution
 Outline A short review on Bayesian analysis. Binomial, Multinomial, Normal, Beta, Dirichlet Posterior mean, MAP, credible interval, posterior distribution Gibbs sampling Revisit the Gaussian mixture model
Outline A short review on Bayesian analysis. Binomial, Multinomial, Normal, Beta, Dirichlet Posterior mean, MAP, credible interval, posterior distribution Gibbs sampling Revisit the Gaussian mixture model
Bayesian dynamic modeling for large space-time weather datasets using Gaussian predictive processes
 Bayesian dynamic modeling for large space-time weather datasets using Gaussian predictive processes Sudipto Banerjee 1 and Andrew O. Finley 2 1 Biostatistics, School of Public Health, University of Minnesota,
Bayesian dynamic modeling for large space-time weather datasets using Gaussian predictive processes Sudipto Banerjee 1 and Andrew O. Finley 2 1 Biostatistics, School of Public Health, University of Minnesota,
Abel Inversion using the Maximum Entropy Method
 Abel Inversion using the Maximum Entropy Method Danilo R. Neuber Wolfgang von der Linden 3rd October 2003 Inst. für Theoretische Physik, Tel.: +43/3 16/8 73-81 88; neuber@itp.tu-graz.ac.at Inst. für Theoretische
Abel Inversion using the Maximum Entropy Method Danilo R. Neuber Wolfgang von der Linden 3rd October 2003 Inst. für Theoretische Physik, Tel.: +43/3 16/8 73-81 88; neuber@itp.tu-graz.ac.at Inst. für Theoretische
Wrapped Gaussian processes: a short review and some new results
 Wrapped Gaussian processes: a short review and some new results Giovanna Jona Lasinio 1, Gianluca Mastrantonio 2 and Alan Gelfand 3 1-Università Sapienza di Roma 2- Università RomaTRE 3- Duke University
Wrapped Gaussian processes: a short review and some new results Giovanna Jona Lasinio 1, Gianluca Mastrantonio 2 and Alan Gelfand 3 1-Università Sapienza di Roma 2- Università RomaTRE 3- Duke University
Models for models. Douglas Nychka Geophysical Statistics Project National Center for Atmospheric Research
 Models for models Douglas Nychka Geophysical Statistics Project National Center for Atmospheric Research Outline Statistical models and tools Spatial fields (Wavelets) Climate regimes (Regression and clustering)
Models for models Douglas Nychka Geophysical Statistics Project National Center for Atmospheric Research Outline Statistical models and tools Spatial fields (Wavelets) Climate regimes (Regression and clustering)
Linear Models A linear model is defined by the expression
 Linear Models A linear model is defined by the expression x = F β + ɛ. where x = (x 1, x 2,..., x n ) is vector of size n usually known as the response vector. β = (β 1, β 2,..., β p ) is the transpose
Linear Models A linear model is defined by the expression x = F β + ɛ. where x = (x 1, x 2,..., x n ) is vector of size n usually known as the response vector. β = (β 1, β 2,..., β p ) is the transpose
Multistage Anslysis on Solar Spectral Analyses with Uncertainties in Atomic Physical Models
 Multistage Anslysis on Solar Spectral Analyses with Uncertainties in Atomic Physical Models Xixi Yu Imperial College London xixi.yu16@imperial.ac.uk 23 October 2018 Xixi Yu (Imperial College London) Multistage
Multistage Anslysis on Solar Spectral Analyses with Uncertainties in Atomic Physical Models Xixi Yu Imperial College London xixi.yu16@imperial.ac.uk 23 October 2018 Xixi Yu (Imperial College London) Multistage
Bayesian Inference. Chapter 4: Regression and Hierarchical Models
 Bayesian Inference Chapter 4: Regression and Hierarchical Models Conchi Ausín and Mike Wiper Department of Statistics Universidad Carlos III de Madrid Master in Business Administration and Quantitative
Bayesian Inference Chapter 4: Regression and Hierarchical Models Conchi Ausín and Mike Wiper Department of Statistics Universidad Carlos III de Madrid Master in Business Administration and Quantitative
Three-dimensional nature of magnetic reconnection X-line in asymmetric current sheets
 Blue Waters symposium 2017 Three-dimensional nature of magnetic reconnection X-line in asymmetric current sheets Yi-Hsin Liu @ NASA- Goddard Space Flight Center William Daughton @ Los Alamos National Lab
Blue Waters symposium 2017 Three-dimensional nature of magnetic reconnection X-line in asymmetric current sheets Yi-Hsin Liu @ NASA- Goddard Space Flight Center William Daughton @ Los Alamos National Lab
Combining Experimental Data and Computer Simulations, With an Application to Flyer Plate Experiments
 Combining Experimental Data and Computer Simulations, With an Application to Flyer Plate Experiments LA-UR-6- Brian Williams, Los Alamos National Laboratory Dave Higdon, Los Alamos National Laboratory
Combining Experimental Data and Computer Simulations, With an Application to Flyer Plate Experiments LA-UR-6- Brian Williams, Los Alamos National Laboratory Dave Higdon, Los Alamos National Laboratory