An analysis of the self-excited torsional vibrations of the electromechanical drive system
|
|
|
- Damian Woods
- 5 years ago
- Views:
Transcription
1 Vibration in Phyical Sytem Vol. 7 (16) An analyi of the elf-excited torional vibration of the electromechanical drive ytem Robert KONOWROCKI and Tomaz SZOLC Intitute of Fundamental Technological Reearch of the Polih Academy of Science ul. A. Pawińkiego 5B, -16 Warzawa, rkonow@ippt.pan.pl, tzolc@ippt.pan.pl Abtract Thi paper preent a dynamic analyi of torional vibration of the railway drive ytem. A dynamic electromechanical drive model ha been created and then integrated with the railway wheelet-rail ytem to imulate elf-excited torional vibration of the conidered ytem. Reult of thi analyi are ued in order to invetigate the drive ytem enitivity to torional ocillation. Here, the dynamic electromechanical interaction between the electric driving motor and the rotating wheelet i conidered. Thi invetigation ha proved that the torional tiffne and damping of drivetrain ytem trongly affect amplitude of the elf-excited vibration. A elf-excited vibration affecting on an energy conumption of the electric motor of the conidered ytem are tudied Keyword: torional vibration, electromechanical coupling, wheel-rail adheion, wheelet drivetrain dynamic 1. Introduction Mechanical vibration and deformation are phenomena aociated with an operation of majority of railway vehicle drivetrain tructure. The knowledge about torional vibration in tranmiion ytem of railway vehicle i of a great importance in the field dynamic of mechanical ytem [1]. Torional vibration in the railway vehicle drive train are generated by everal phenomena. Generally, thee phenomena are very complex and they can be divided into two main part. To the firt one belong the electromechanical interaction between of the railway drive ytem including the: electric motor, gear, the driven part of dic clutch and driving part of the gear clutch []. To the econd one belong torional vibration of the flexible wheel [3,4] and wheelet caued by variation of adheion force in the wheel-rail contact zone [5]. An interaction of the adheion force ha nonlinear feature which are related to the creep value and trongly depend on the wheel-rail zone condition and track geometry (when driving on a curve ection of the track). In many modern mechanical ytem torional tructural deformability play an important role. Often the tudy of railway vehicle dynamic uing the rigid multibody method without torionally deformable element are ued [6]. Thi approach doe not allow to analye elf-excited vibration which have an important influence on the wheelrail longitudinal interaction [7]. A dynamic modelling of the electrical drive ytem coupled with element of a driven machine or vehicle i particularly important when the purpoe of uch modelling i to obtain an information about the tranient phenomena of ytem operation, like a run-up, run-down and lo of adheion in the wheel-rail zone. In thi paper mot attention i paid to the modelling of an electromechanical interaction between the electric driving motor and the railway wheelet a well a to an influence of the elf-excited torional vibration in the conidered drive ytem.
2 188. Mathematical modeling of the wheelet and the electric motor In order to invetigate a character of elf-excited torional vibration in the electric railway vehicle powertrain and a dynamic mutual coupling between the wheelet and the electric motor, a poibly realitic and reliable electromechanical model of the railway drivetrain i applied. The mechanical drive ytem i repreented by a torionally vibrating ytem of four-dof. The cheme of the conidered model i hown in Figure 1. Fig. 1. Scheme of the dynamic model of the railway wheelet drive ytem A mathematical model of the ingle torionally deformable railway wheelet under torional vibration induced by the traction motor and variou adheion frictional effect occurring in wheel-rail contact zone ha been derived by mean of the econd-order Lagrange equation in the generalized coordinate φ i(t). Thee coordinate decribe angular diplacement of the drivetrain component of the wheelet. Here, there will be preented a torional dynamic analyi of the ingle wheelet running on a geometrically perfect traight ection under variou operational condition determined by longitudinal lip i of both wheel, vertical wheel force Q+m g and vehicle velocity v. The drive torque and the retarding one due to the creep force in contact of the rail with with the wheel complement the conervative railway drive model on the right ide (1) and it can be expreed a & (t) = ( K wheelet + K gear ) ϕ(t) + ( Cwheelet + Cgear ) & ϕ(t) = M drive M creep, (1) Iϕ where I denote the ma matrix containing ma moment of inertia of rotating element of the drive ytem, the matrice K wheel, K gear, C wheel and C gear expre the torional tiffne and damping propertie of the wheelet, dic-clutch and of the gearbox wheel, repectively. Vector M drive contain the electromagnetic torque generated by an aynchronou motor decribed in the following part of the paper and vector M creep contain the traction torque generated by longitudinal tangential load in the wheel-rail zone. Their form can be expreed a Tcreep _ i = µ i ( i ) ( Q + mi g), i = 1,, () where Q i the normal load impoed on the ingle wheel, r i the wheel radiu and µ( i) i the traction coefficient expreed in Eq. (4). It maximum value i called an adheion coefficient. The longitudinal creepage of the wheel i defined in the following form 3.6ωir 3.6ϕ& ir = ( -1), i = + ( -1), i = 1,, (3) v v
3 Vibration in Phyical Sytem Vol. 7 (16) where and i are the longitudinal creepage before and during diturbance, repectively. Symbol ωi i the angular peed of the i-th wheel, i-index mean the left and the right wheel and v denote forward wheelet velocity in km/h obtained by the equivalent angular peed of wheelet axle ϕ& at the contact point. In equation (1) the traction torque including torque M creep_1, on left and right wheel of the wheelet have nonlinear propertie. Thee propertie are dependent on a profile of adheion characteritic decribing a contact in the wheel-rail zone. Depending on the adopted variou maintenance, operation and weather condition, thi characteritic can take into conideration variou form of creepage curve, a hown in Fig.. The creepage curve applied for the carried out invetigation ha been plotted in Fig. 3 and it can be expreed by the following equation b µ ( i ) =.3*[(a + exp(-i ) + tanh( i )/ + (d atan(e i )) + exp(f i ))], i = 1,. (4) c For dry and wet weather condition in the wheel-rail zone parameter of Eq. 4 have numerical value contained in Table 1. Table 1. Parameter for traction coefficient in Eg. (4) Quantity a b/c d e f dry wet Fig.. Adheion-creep characteritic of the railway condition [8] table region untable region Fig. 3. Profile of adheion curve uing in invetigation The adheion curve can be divided into two region, ee Fig. 3. The firt region i characterized by a rapidly riing lope of the curve i the table region. The econd one, due to a negative damping reult in viible decreaing lope, can lead to elf-excited ocillation in the wheel-rail contact zone. Thi phenomenon make the driven wheelet lipping on the rail of a railway track. Conequently, when a tangential force between the wheel and the rail exceed an adheion force in the wheel-rail contact zone, the elf-excited torional vibration of the wheelet occur. Such a phenomenon ha a very large impact on the relative rotation between the wheel and the axle due to a lack of friction in pre fitting [9] and it can make vehicle derailed. Additional dynamic torional overload produce diturbance in the wheelet drive ytem, which ha a influence on the traction moment of a railway vehicle. Thi characteritic of the traction moment i alo dependent on electrical parameter of the motor, power upply and it regulation. A modeling of the
4 19 electrical part of a drivetrain i a very difficult and complex tak. For a imple olution it i poible to ue a linearization around of the working point tatic characteritic of the driving motor. But, in the cae of a more advanced analyi of tranient phenomena in the drivetrain an accurate circuit model of the electric motor i needed [1,11]. The aynchronou motor are very commonly applied a railway vehicle driving ource. From the viewpoint of electromechanical coupling invetigation, for an introductory approach the properly advanced circuit model of the electric motor eem to be required, imilarly a e.g. in [1]. In the cae of the ymmetrical three-phae aynchronou motor electric current ocillation in it winding are decribed by the ix circuit voltage equation. In order to implicity of their form they are tranformed into the ytem of four Park equation in the o called αβ-dq reference ytem U co( ω ) L Lm e t 3 U in( ω ) e t = 3 Lm R + 3 1( t) plm & ϕ R 3 pl 1 ( t) m & ϕ L 1 + L m 3 L m p & ϕ1( t) R r 1 Lr + Lm ( 1 Lr + Lm ) Lm i& ( ) α t 3 L i& ( ) m β t + i & r d ( t) 1 L + r r L ( ) m i& q t i ( ) α t i ( ) )( 1 ), 1 ( β t p & ϕ t L r + L m i r ( t) d Rr r iq ( t) where U denote the power upply voltage, ω e i the upply voltage circular frequency, L, L r are the tator coil inductance and the equivalent rotor coil inductance, repectively, L m denote the relative rotor-to-tator coil inductance, R, R r are the tator coil reitance and the equivalent rotor coil reitance, repectively, p i the number of pair of the motor magnetic pole, ϕ& 1 (t) i the current rotor angular peed including the average and vibratory component and iα, i β are the electric current in the tator winding reduced to the electric field equivalent axe α and β and i r r d, i q are the electric current in the rotor winding reduced to the electric field equivalent axe d and q, [1]. Then, the electromagnetic torque generated by uch a motor can be expreed by the following formula 3pL r r m i i i = β i d α q M. In our approach the interaction between the electromagnetic and mechanical ytem of the conidered powertrain coupled mutually through electromagnetic torque M and angular rotor velocity ϕ& 1 i hown in Eq. (5) and (6). In order to control the electric motor aumed in the applied drive ytem model the field-oriented control method ha been ued [13]. According to the above, thi et of coupled electromechanical Eq. (1), (5) and (6) i going to be imultaneouly olved by mean of a elected direct integration method for electric parameter including: reitance of the tator and the rotor equal R =.88 Ω, R r=.158 Ω. The relative inductance, inductance of the tator winding and (5) (6)
5 Vibration in Phyical Sytem Vol. 7 (16) inductance of the rotor winding are repectively equal to L m =,41 H, L =,45 H and L r =,418 H.The aynchronou motor ha 4 pole pair and it upply voltage i equal to 3 kv with 6 Hz upply frequency. In the conidered cae, the Runge-Kutta fourthorder method will be applied for motion equation of the electromechanical model aumed in thi way. 3. Numerical reult In the computational example railway drivetrain ytem with the torionally flexible wheelet i ued a an object of conideration. Thi wheelet of a total weight 15 kg and a load of the ingle wheel equal to Q=4 kn i driven by the aynchronou motor by mean of the dic-clutch with torional tiffne and damping coefficient k 1=3 knm, c 1=1 N/m. The pur gear tage of the ratio i=1:6 reduce a rotational peed of the * wheelet into & ϕ = & ϕ χ. There i aumed that the minimum radiu of the wheelet axle and the half of length of the axle are repectively equal to.8 and.75 m. Thi axle i made of teel P35G. The torional tiffne of thi axi ha been determined equal to k =k 3= 6.9e7 Nm/rad. More parameter applied in thi invetigation are alo given in the Table. Table Simulation bae parameter χ c c3 I Iz Ig Ikl Ikr.16 5 N/m 5 N/m.1 kgm. kgm 43 kgm 78 kgm 78 kgm The imulation model decribed above can be ued to imulate everal different condition of operation, i.e. motor acceleration, deceleration, load change, fault condition, etc. However, due the limited ize, only elected reult are preented here. An amplitude of elf-excited vibration i an important evaluating indicator to meaure the vibration magnitude. Some drive ytem parameter influencing the amplitude of the elf-excited torional vibration are hown in Fig. 4 and 5. Figure 4a and 4c preent the reult of the elf-excited vibration amplitude and the pectrum of them at variou damping between the drivetrain ytem and the wheelet wheel. A hown in thi figure, the vibration amplitude decreae with an increae of damping level where the dominant frequency of the vibration i kept contant. An increae of the damping can retrain thi amplitude and horten the convergence time of the torional vibration, but it i not affected whether the elf-excited vibration occur or not. The ame effect can be oberved on time-hitorie of the current of the tator winding hown in Fig. 4b and 4 d. Figure 5a how a reult of the elf-excited vibration amplitude at different equivalent tiffne between the drivetrain and the wheelet wheel of wheelet.

 and amplitude pectrum (c) of the difference between the angular")
 and amplitude pectrum (d) of the electric current in the tator winding")
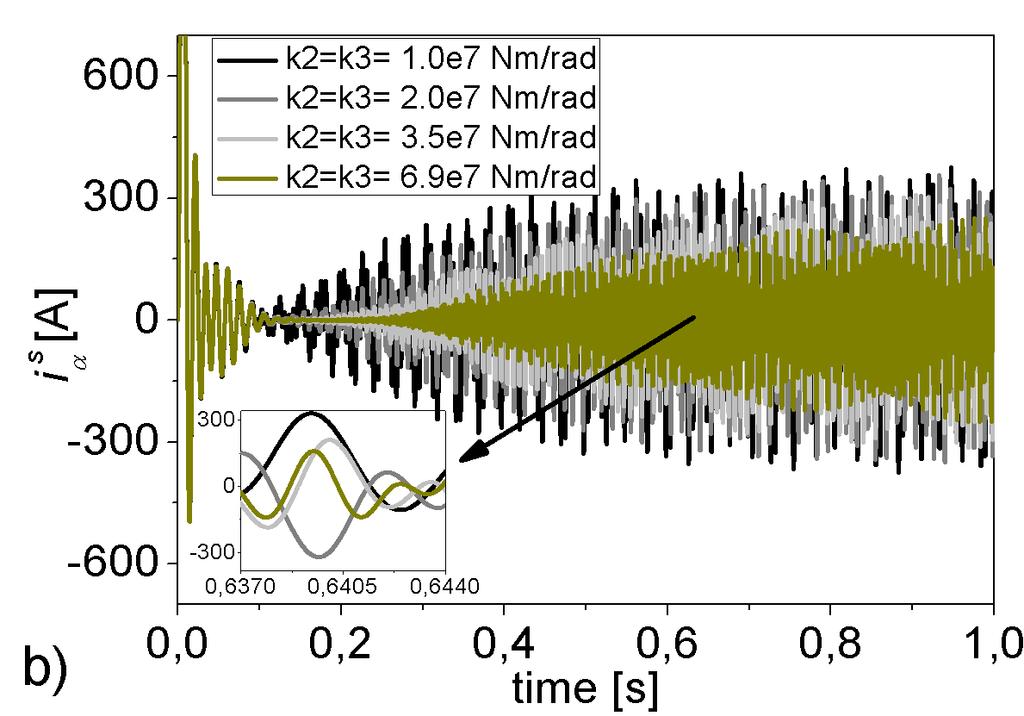
6 19 Fig. 4. Self-excited torional vibration amplitude of the mechanical and electric parameter at variou torional damping of wheelet drivetrain. Time-hitory (a) and amplitude pectrum (c) of the difference between the angular diplacement of the left and right wheelet wheel. Time-hitory (b) and amplitude pectrum (d) of the electric current in the tator winding Fig. 5. Self-excited torional vibration amplitude of the mechanical and electric parameter at variou torional tiffne of wheelet drivetrain. Time-hitory (a) and amplitude pectrum (c) of the difference between the angular diplacement of the left and right wheelet wheel. Time-hitory (b) and amplitude pectrum (d) of the electric current in the tator winding
7 Vibration in Phyical Sytem Vol. 7 (16) A hown in thi figure (Fig 5.), the vibration amplitude decreae with an increae of k and k 3. It indicate that where increaing the torional tiffne of drivetrain ytem, it i influence on the tability of the vibration and it hifting dominant frequency of the vibration in the higher range of the pectrum (Fig. 5c). Conidering the electrical parameter value of motor obtained from the above invetigation it i worth highlighting that the elf-excitation torional vibration affected on the entire electromechamical drivtrain ytem and they have a ignificant influence on the amount of theoretically expected electric energy P el conumed by the driving motor. In the cae of the invetigated ytem, thi energy can be determined by the electromotive force induced in the aynchronou motor phae by voltage and current in the tator winding. Thi energy can be defined [7]. P el tk 1 = [ U t k d ( t) iα ( t) + U q ( t) iβ ( t)] dt, (7) where U d(t)= co( ) 3 U ω e t, U q(t)= 3 U in( ω ) e t, and i α (t), i β (t), denote the voltage and current in the tator circuit of the electric motor phae tranformed into the reference ytem of Park equation, t k i the total duration time of the each variant of an analyi and the remaining ymbol have been already defined in Eq. (5) and (6). Table 3 illutrate the amount of electric energy conumed by the drivetrain motor during the conidered tet cenario at variou of parameter the drive ytem dicued above. Table 3. Amount of electric energy conumed by the aynchronou motor during the aumed four cenario of the invetigation uing the aumed drivetrain model tiffne of drivtrain [Nm/rad] 1e7 e7 3.5e7 6.9 e7 tiffne-energy conumed [kw] 6,35 7,44 76,65 78,93 damping of drivtrain [Nm/rad] 5, 1, 15,, damping-energy conumed [kw] 78,93 88,37 88,59 93, From a comparion of the reult hown in Table 3 it follow that, when the torional tiffne increae, more electric energy have been conumed. Thi fact can be ubtantiated by change amplitude of the time-hitorie of the difference between the angular diplacement of the left and right wheelet wheel characteritic of preented in Fig Final remark and preview In thi paper, an electromechanical model of the railway vehicle drive ytem ha been performed. Thi model ha been ued to invetigate elf-excited torional vibration occurring in thi ytem. In the invetigation their influence of the torional vibration on the electric parameter of the drive motor are alo conidered. From obtained reult it follow that a reduction of the elf-excited vibration amplitude by mean of increaing the damping and tiffne between the driving motor and the wheelet and torion tiffne of wheelet occur. The reult obtained uing numerical imulation indicated that the elf-
8 194 excited torional vibration in the conidered drive ytem are trongly dependent on the characteritic of the adheion coefficient in wheel-rail contact zone. A circuit model of the electric motor in the conidered drive ytem enable u to obtain value of electrical parameter characterizing the driving motor. The information concerning a frequency variation of the current in the driving motor tator can be ued for monitoring and identification of elf-excited vibration in the wheelet drivetrain ytem. The further work will be denoted to an aumption of the vehicle model with the drivetrain ytem and it will be carried out experimentally verification on real railway vehicle. Reference 1. R. Bogacz, T. Szolc, H. Irretier, An application of torional wave analyi to turbogenerator rotor haft repone, J.Vibr. Acou. -Tran. of the Ame, Vol (199) O. Ahmedov, V. Zeman, M. Byrtu, Modelling of vibration and modal propertie of electric locomotive drive, Eng. Mech., Vol. 19: /3 (1) S. Noga, R. Bogacz, T. Markowki, Vibration analyi of a wheel compoed of a ring and a wheel-plate modelled a a three-parameter elatic foundation, J.Sound Vib., Vol. 333:4, (14) R. Bogacz, R. Konowrocki, On new effect of wheel-rail interaction, Arch. Appl. Mech, Vol.8 (1) V. Zeman, Z. Hlavac, Dynamic wheelet drive load of the railway vehicle caued by hortcircuit motor moment, App. & Comp. Mech., Vol.3, No. (9) B.S. Branilav, Simulation of torion moment at the wheel et of the railway vehicle with the traction electromotor for wavy direct current, Mech. Tran. Com., Iue 3 (8) J. Liu, H. Zhao, W. Zhai, Mechanim of elf-excited torional vibration of locomotive driving ytem, Front. Mech. Eng.China, Vol.5:4 (1,) A.K. Kumar, Method and ytem of limiting the application of and to a railroad rail, U.S. Patent 7,9,87B, Nov. 6, (7). 9. S. Friedrich, M. Traupe, Dynamic Torional Load on Wheelet. Recent Finding for the Aement, Fatigue Strength and Simulation, T.TVI 4, Milan (14). 1. T. Szolc, R. Konowrocki, M. Michajłow, A. Pręgowka, An invetigation of the dynamic electromechanical coupling effect in machine drive ytem driven by aynchronou motor, Mech. Syt. Signal Proce., Vol.49 (14) R. Konowrocki, T. Szolc, A. Pochanke, A. Pręgowka, An influence of the tepping motor control and friction model on precie poitioning of the complex mechanical ytem, Mech. Syt. Signal Proce., Vol.7-71 (16) K.L., Shi, T.F., Chan, Y.K., Wong, L.S Ho, Modelling and imulation of the threephae induction motor uing Simulink, Int. J. Elect. Eng. Edu., 36 (1999) L. Lipińki, Applying imulation model for operation analyi and election of controller etting in traction drive with induction motor, Electrical Machine - Tranaction Journal, No. 1/ 94 (1) 75-8 (in Polih).
SIMPLIFIED MODEL FOR EPICYCLIC GEAR INERTIAL CHARACTERISTICS
 UNIVERSITY OF PITESTI SCIENTIFIC BULLETIN FACULTY OF ECHANICS AND TECHNOLOGY AUTOOTIVE erie, year XVII, no. ( 3 ) SIPLIFIED ODEL FOR EPICYCLIC GEAR INERTIAL CHARACTERISTICS Ciobotaru, Ticuşor *, Feraru,
UNIVERSITY OF PITESTI SCIENTIFIC BULLETIN FACULTY OF ECHANICS AND TECHNOLOGY AUTOOTIVE erie, year XVII, no. ( 3 ) SIPLIFIED ODEL FOR EPICYCLIC GEAR INERTIAL CHARACTERISTICS Ciobotaru, Ticuşor *, Feraru,
Massachusetts Institute of Technology Dynamics and Control II
 I E Maachuett Intitute of Technology Department of Mechanical Engineering 2.004 Dynamic and Control II Laboratory Seion 5: Elimination of Steady-State Error Uing Integral Control Action 1 Laboratory Objective:
I E Maachuett Intitute of Technology Department of Mechanical Engineering 2.004 Dynamic and Control II Laboratory Seion 5: Elimination of Steady-State Error Uing Integral Control Action 1 Laboratory Objective:
No-load And Blocked Rotor Test On An Induction Machine
 No-load And Blocked Rotor Tet On An Induction Machine Aim To etimate magnetization and leakage impedance parameter of induction machine uing no-load and blocked rotor tet Theory An induction machine in
No-load And Blocked Rotor Tet On An Induction Machine Aim To etimate magnetization and leakage impedance parameter of induction machine uing no-load and blocked rotor tet Theory An induction machine in
Section Induction motor drives
 Section 5.1 - nduction motor drive Electric Drive Sytem 5.1.1. ntroduction he AC induction motor i by far the mot widely ued motor in the indutry. raditionally, it ha been ued in contant and lowly variable-peed
Section 5.1 - nduction motor drive Electric Drive Sytem 5.1.1. ntroduction he AC induction motor i by far the mot widely ued motor in the indutry. raditionally, it ha been ued in contant and lowly variable-peed
Mechanics. Free rotational oscillations. LD Physics Leaflets P Measuring with a hand-held stop-clock. Oscillations Torsion pendulum
 Mechanic Ocillation Torion pendulum LD Phyic Leaflet P.5.. Free rotational ocillation Meauring with a hand-held top-clock Object of the experiment g Meauring the amplitude of rotational ocillation a function
Mechanic Ocillation Torion pendulum LD Phyic Leaflet P.5.. Free rotational ocillation Meauring with a hand-held top-clock Object of the experiment g Meauring the amplitude of rotational ocillation a function
Dynamic Simulation of a Three-Phase Induction Motor Using Matlab Simulink
 Dynamic Simulation of a ThreePhae Induction Motor Uing Matlab Simulink Adel Aktaibi & Daw Ghanim, graduate tudent member, IEEE, M. A. Rahman, life fellow, IEEE, Faculty of Engineering and Applied Science,
Dynamic Simulation of a ThreePhae Induction Motor Uing Matlab Simulink Adel Aktaibi & Daw Ghanim, graduate tudent member, IEEE, M. A. Rahman, life fellow, IEEE, Faculty of Engineering and Applied Science,
The Influence of the Load Condition upon the Radial Distribution of Electromagnetic Vibration and Noise in a Three-Phase Squirrel-Cage Induction Motor
 The Influence of the Load Condition upon the Radial Ditribution of Electromagnetic Vibration and Noie in a Three-Phae Squirrel-Cage Induction Motor Yuta Sato 1, Iao Hirotuka 1, Kazuo Tuboi 1, Maanori Nakamura
The Influence of the Load Condition upon the Radial Ditribution of Electromagnetic Vibration and Noie in a Three-Phae Squirrel-Cage Induction Motor Yuta Sato 1, Iao Hirotuka 1, Kazuo Tuboi 1, Maanori Nakamura
Investigating Efficiency of a Five-Mass Electromechanical System having Damping Friction, Elastic Coupling and Clearance
 Invetigating Efficiency of a Five-Ma Electromechanical Sytem having Damping Friction Elatic oupling and learance Mr. Aboah Boateng Emmanuel Student (BSc. Electrical and Electronic Engineering Department
Invetigating Efficiency of a Five-Ma Electromechanical Sytem having Damping Friction Elatic oupling and learance Mr. Aboah Boateng Emmanuel Student (BSc. Electrical and Electronic Engineering Department
Gain and Phase Margins Based Delay Dependent Stability Analysis of Two- Area LFC System with Communication Delays
 Gain and Phae Margin Baed Delay Dependent Stability Analyi of Two- Area LFC Sytem with Communication Delay Şahin Sönmez and Saffet Ayaun Department of Electrical Engineering, Niğde Ömer Halidemir Univerity,
Gain and Phae Margin Baed Delay Dependent Stability Analyi of Two- Area LFC Sytem with Communication Delay Şahin Sönmez and Saffet Ayaun Department of Electrical Engineering, Niğde Ömer Halidemir Univerity,
BASIC INDUCTION MOTOR CONCEPTS
 INDUCTION MOTOS An induction motor ha the ame phyical tator a a ynchronou machine, with a different rotor contruction. There are two different type of induction motor rotor which can be placed inide the
INDUCTION MOTOS An induction motor ha the ame phyical tator a a ynchronou machine, with a different rotor contruction. There are two different type of induction motor rotor which can be placed inide the
THE EXPERIMENTAL PERFORMANCE OF A NONLINEAR DYNAMIC VIBRATION ABSORBER
 Proceeding of IMAC XXXI Conference & Expoition on Structural Dynamic February -4 Garden Grove CA USA THE EXPERIMENTAL PERFORMANCE OF A NONLINEAR DYNAMIC VIBRATION ABSORBER Yung-Sheng Hu Neil S Ferguon
Proceeding of IMAC XXXI Conference & Expoition on Structural Dynamic February -4 Garden Grove CA USA THE EXPERIMENTAL PERFORMANCE OF A NONLINEAR DYNAMIC VIBRATION ABSORBER Yung-Sheng Hu Neil S Ferguon
Representation of a Group of Three-phase Induction Motors Using Per Unit Aggregation Model A.Kunakorn and T.Banyatnopparat
 epreentation of a Group of Three-phae Induction Motor Uing Per Unit Aggregation Model A.Kunakorn and T.Banyatnopparat Abtract--Thi paper preent a per unit gregation model for repreenting a group of three-phae
epreentation of a Group of Three-phae Induction Motor Uing Per Unit Aggregation Model A.Kunakorn and T.Banyatnopparat Abtract--Thi paper preent a per unit gregation model for repreenting a group of three-phae
Basic parts of an AC motor : rotor, stator, The stator and the rotor are electrical
 INDUCTION MOTO 1 CONSTUCTION Baic part of an AC motor : rotor, tator, encloure The tator and the rotor are electrical circuit that perform a electromagnet. CONSTUCTION (tator) The tator - tationary part
INDUCTION MOTO 1 CONSTUCTION Baic part of an AC motor : rotor, tator, encloure The tator and the rotor are electrical circuit that perform a electromagnet. CONSTUCTION (tator) The tator - tationary part
Estimating floor acceleration in nonlinear multi-story moment-resisting frames
 Etimating floor acceleration in nonlinear multi-tory moment-reiting frame R. Karami Mohammadi Aitant Profeor, Civil Engineering Department, K.N.Tooi Univerity M. Mohammadi M.Sc. Student, Civil Engineering
Etimating floor acceleration in nonlinear multi-tory moment-reiting frame R. Karami Mohammadi Aitant Profeor, Civil Engineering Department, K.N.Tooi Univerity M. Mohammadi M.Sc. Student, Civil Engineering
EE C128 / ME C134 Problem Set 1 Solution (Fall 2010) Wenjie Chen and Jansen Sheng, UC Berkeley
 Wenjie Chen and Jansen Sheng, UC Berkeley") EE C28 / ME C34 Problem Set Solution (Fall 200) Wenjie Chen and Janen Sheng, UC Berkeley. (0 pt) BIBO tability The ytem h(t) = co(t)u(t) i not BIBO table. What i the region of convergence for H()? A bounded
EE C28 / ME C34 Problem Set Solution (Fall 200) Wenjie Chen and Janen Sheng, UC Berkeley. (0 pt) BIBO tability The ytem h(t) = co(t)u(t) i not BIBO table. What i the region of convergence for H()? A bounded
Dynamic Simulation of NEK Reactor Coolant Pump with a Best Estimate Full Scale Model in APROS
 Dynamic Simulation of NEK Reactor Coolant Pump with a Bet Etimate Full Scale Model in APROS ABSTRACT Dejan Slovenc ZEL-EN d.o.o. Hočevarjev trg 1, 870, Krško, Slovenia dejan.lovenc@zel-en.i Ivica Bašić
Dynamic Simulation of NEK Reactor Coolant Pump with a Bet Etimate Full Scale Model in APROS ABSTRACT Dejan Slovenc ZEL-EN d.o.o. Hočevarjev trg 1, 870, Krško, Slovenia dejan.lovenc@zel-en.i Ivica Bašić
Fluid-structure coupling analysis and simulation of viscosity effect. on Coriolis mass flowmeter
 APCOM & ISCM 11-14 th December, 2013, Singapore luid-tructure coupling analyi and imulation of vicoity effect on Corioli ma flowmeter *Luo Rongmo, and Wu Jian National Metrology Centre, A*STAR, 1 Science
APCOM & ISCM 11-14 th December, 2013, Singapore luid-tructure coupling analyi and imulation of vicoity effect on Corioli ma flowmeter *Luo Rongmo, and Wu Jian National Metrology Centre, A*STAR, 1 Science
Bahram Noshad Department of Electrical Engineering, Bandar Deylam Branch, Islamic Azad University, Bandar Deylam, Iran.
 Journal of Advance in Computer Reearch Quarterly pissn: 345-66x eissn: 345-678 Sari Branch, Ilamic Azad Univerity, Sari, I.R.Iran (Vol. 9, No. 3, Augut 8), Page: - www.jacr.iauari.ac.ir A New Model for
Journal of Advance in Computer Reearch Quarterly pissn: 345-66x eissn: 345-678 Sari Branch, Ilamic Azad Univerity, Sari, I.R.Iran (Vol. 9, No. 3, Augut 8), Page: - www.jacr.iauari.ac.ir A New Model for
ME 375 FINAL EXAM Wednesday, May 6, 2009
 ME 375 FINAL EXAM Wedneday, May 6, 9 Diviion Meckl :3 / Adam :3 (circle one) Name_ Intruction () Thi i a cloed book examination, but you are allowed three ingle-ided 8.5 crib heet. A calculator i NOT allowed.
ME 375 FINAL EXAM Wedneday, May 6, 9 Diviion Meckl :3 / Adam :3 (circle one) Name_ Intruction () Thi i a cloed book examination, but you are allowed three ingle-ided 8.5 crib heet. A calculator i NOT allowed.
Comparison of Hardware Tests with SIMULINK Models of UW Microgrid
 Comparion of Hardware Tet with SIMULINK Model of UW Microgrid Introduction Thi report include a detailed dicuion of the microource available on the Univerity- of- Wiconin microgrid. Thi include detail
Comparion of Hardware Tet with SIMULINK Model of UW Microgrid Introduction Thi report include a detailed dicuion of the microource available on the Univerity- of- Wiconin microgrid. Thi include detail
POWER SYSTEM SMALL SIGNAL STABILITY ANALYSIS BASED ON TEST SIGNAL
 POWE YEM MALL INAL ABILIY ANALYI BAE ON E INAL Zheng Xu, Wei hao, Changchun Zhou Zheang Univerity, Hangzhou, 37 PChina Email: hvdc@ceezueducn Abtract - In thi paper, a method baed on ome tet ignal (et
POWE YEM MALL INAL ABILIY ANALYI BAE ON E INAL Zheng Xu, Wei hao, Changchun Zhou Zheang Univerity, Hangzhou, 37 PChina Email: hvdc@ceezueducn Abtract - In thi paper, a method baed on ome tet ignal (et
AEIJST June Vol 2 Issue 6 ISSN
 Theoretical Invetigation Performance of Proportional Directional Control Value Uing Matlab /Simulink *Sudhindra R. Kulkarni **S.H.Kulkarni ***Sudhindra R. Kulkarni *Department of Mechanical Engineering,
Theoretical Invetigation Performance of Proportional Directional Control Value Uing Matlab /Simulink *Sudhindra R. Kulkarni **S.H.Kulkarni ***Sudhindra R. Kulkarni *Department of Mechanical Engineering,
CHAPTER 4 DESIGN OF STATE FEEDBACK CONTROLLERS AND STATE OBSERVERS USING REDUCED ORDER MODEL
 98 CHAPTER DESIGN OF STATE FEEDBACK CONTROLLERS AND STATE OBSERVERS USING REDUCED ORDER MODEL INTRODUCTION The deign of ytem uing tate pace model for the deign i called a modern control deign and it i
98 CHAPTER DESIGN OF STATE FEEDBACK CONTROLLERS AND STATE OBSERVERS USING REDUCED ORDER MODEL INTRODUCTION The deign of ytem uing tate pace model for the deign i called a modern control deign and it i
Earth Potential Rise (EPR) Computation for a Fault on Transmission Mains Pole
 Computation for a Fault on Transmission Mains Pole") ACN: 32586675 ABN: 8632586675 NATIONAL ELECTRICAL ENGINEERING CONULTANCY Earth otential Rie (ER) Computation for a Fault on Tranmiion Main ole repared by: M. Naereddine ACN: 32586675 ABN: 8632586675 Abtract
ACN: 32586675 ABN: 8632586675 NATIONAL ELECTRICAL ENGINEERING CONULTANCY Earth otential Rie (ER) Computation for a Fault on Tranmiion Main ole repared by: M. Naereddine ACN: 32586675 ABN: 8632586675 Abtract
LOAD FREQUENCY CONTROL OF MULTI AREA INTERCONNECTED SYSTEM WITH TCPS AND DIVERSE SOURCES OF POWER GENERATION
 G.J. E.D.T.,Vol.(6:93 (NovemberDecember, 03 ISSN: 39 793 LOAD FREQUENCY CONTROL OF MULTI AREA INTERCONNECTED SYSTEM WITH TCPS AND DIVERSE SOURCES OF POWER GENERATION C.Srinivaa Rao Dept. of EEE, G.Pullaiah
G.J. E.D.T.,Vol.(6:93 (NovemberDecember, 03 ISSN: 39 793 LOAD FREQUENCY CONTROL OF MULTI AREA INTERCONNECTED SYSTEM WITH TCPS AND DIVERSE SOURCES OF POWER GENERATION C.Srinivaa Rao Dept. of EEE, G.Pullaiah
Improving Power System Transient Stability with Static Synchronous Series Compensator
 American Journal of Applied Science 8 (1): 77-81, 2011 ISSN 1546-9239 2010 Science Pulication Improving Power Sytem Tranient Staility with Static Synchronou Serie Compenator Prechanon Kumkratug Diviion
American Journal of Applied Science 8 (1): 77-81, 2011 ISSN 1546-9239 2010 Science Pulication Improving Power Sytem Tranient Staility with Static Synchronou Serie Compenator Prechanon Kumkratug Diviion
What lies between Δx E, which represents the steam valve, and ΔP M, which is the mechanical power into the synchronous machine?
 A 2.0 Introduction In the lat et of note, we developed a model of the peed governing mechanim, which i given below: xˆ K ( Pˆ ˆ) E () In thee note, we want to extend thi model o that it relate the actual
A 2.0 Introduction In the lat et of note, we developed a model of the peed governing mechanim, which i given below: xˆ K ( Pˆ ˆ) E () In thee note, we want to extend thi model o that it relate the actual
15 Problem 1. 3 a Draw the equivalent circuit diagram of the synchronous machine. 2 b What is the expected synchronous speed of the machine?
 Exam Electrical Machine and Drive (ET4117) 6 November 009 from 9.00 to 1.00. Thi exam conit of 4 problem on 4 page. Page 5 can be ued to anwer problem quetion b. The number before a quetion indicate how
Exam Electrical Machine and Drive (ET4117) 6 November 009 from 9.00 to 1.00. Thi exam conit of 4 problem on 4 page. Page 5 can be ued to anwer problem quetion b. The number before a quetion indicate how
Analysis of Prevention of Induction Motors Stalling by Capacitor Switching
 16th NTIONL POWER SYSTEMS CONFERENCE, 15th-17th DECEMER, 2010 260 nalyi of Prevention of Induction Motor Stalling by Capacitor Switching S.Maheh and P.S Nagendra rao Department of Electrical Engineering
16th NTIONL POWER SYSTEMS CONFERENCE, 15th-17th DECEMER, 2010 260 nalyi of Prevention of Induction Motor Stalling by Capacitor Switching S.Maheh and P.S Nagendra rao Department of Electrical Engineering
FUNDAMENTALS OF POWER SYSTEMS
 1 FUNDAMENTALS OF POWER SYSTEMS 1 Chapter FUNDAMENTALS OF POWER SYSTEMS INTRODUCTION The three baic element of electrical engineering are reitor, inductor and capacitor. The reitor conume ohmic or diipative
1 FUNDAMENTALS OF POWER SYSTEMS 1 Chapter FUNDAMENTALS OF POWER SYSTEMS INTRODUCTION The three baic element of electrical engineering are reitor, inductor and capacitor. The reitor conume ohmic or diipative
Advanced D-Partitioning Analysis and its Comparison with the Kharitonov s Theorem Assessment
 Journal of Multidiciplinary Engineering Science and Technology (JMEST) ISSN: 59- Vol. Iue, January - 5 Advanced D-Partitioning Analyi and it Comparion with the haritonov Theorem Aement amen M. Yanev Profeor,
Journal of Multidiciplinary Engineering Science and Technology (JMEST) ISSN: 59- Vol. Iue, January - 5 Advanced D-Partitioning Analyi and it Comparion with the haritonov Theorem Aement amen M. Yanev Profeor,
Theoretical study of the dual harmonic system and its application on the CSNS/RCS
 Theoretical tudy of the dual harmonic ytem and it application on the CSNS/RCS Yao-Shuo Yuan, Na Wang, Shou-Yan Xu, Yue Yuan, and Sheng Wang Dongguan branch, Intitute of High Energy Phyic, CAS, Guangdong
Theoretical tudy of the dual harmonic ytem and it application on the CSNS/RCS Yao-Shuo Yuan, Na Wang, Shou-Yan Xu, Yue Yuan, and Sheng Wang Dongguan branch, Intitute of High Energy Phyic, CAS, Guangdong
Improvement of Transient Stability of Power System by Thyristor Controlled Phase Shifter Transformer
 American Journal of Applied Science 7 (11): 1495-1499, 010 ISSN 1546-939 010 Science Publication Improvement of Tranient Stability of Power Sytem by Thyritor Controlled Phae Shifter Tranformer Prechanon
American Journal of Applied Science 7 (11): 1495-1499, 010 ISSN 1546-939 010 Science Publication Improvement of Tranient Stability of Power Sytem by Thyritor Controlled Phae Shifter Tranformer Prechanon
INFLUENCE OF BROKEN ROTOR BARS LOCATION IN THE SQUIRREL CAGE INDUCTION MOTOR USING FINITE ELEMENT METHOD
 Journal of Fundamental and Applied Science ISSN - Available online at http:www.jfa.info INFLUENCE OF BROKEN ROTOR BARS LOCATION IN THE SQUIRREL CAGE INDUCTION MOTOR USING FINITE ELEMENT METHOD N. Halem*,
Journal of Fundamental and Applied Science ISSN - Available online at http:www.jfa.info INFLUENCE OF BROKEN ROTOR BARS LOCATION IN THE SQUIRREL CAGE INDUCTION MOTOR USING FINITE ELEMENT METHOD N. Halem*,
DIRECT TORQUE CONTROL OF THREE PHASE INDUCTION MOTOR USING FUZZY LOGIC SPEED CONTROLLER FOR STEADY/DYNAMIC STATE RESPONSE
 DIRECT TORQUE CONTROL OF THREE PHASE INDUCTION MOTOR USING FUZZY LOGIC SPEED CONTROLLER FOR STEADY/DYNAMIC STATE RESPONSE 1 C. MOHAN RAJ, 2 K.KEERTHIVASAN, 3 RANJITH KUMAR DINAKARAN, 4 N.PUSHPALATHA 1
DIRECT TORQUE CONTROL OF THREE PHASE INDUCTION MOTOR USING FUZZY LOGIC SPEED CONTROLLER FOR STEADY/DYNAMIC STATE RESPONSE 1 C. MOHAN RAJ, 2 K.KEERTHIVASAN, 3 RANJITH KUMAR DINAKARAN, 4 N.PUSHPALATHA 1
CHAPTER 8 OBSERVER BASED REDUCED ORDER CONTROLLER DESIGN FOR LARGE SCALE LINEAR DISCRETE-TIME CONTROL SYSTEMS
 CHAPTER 8 OBSERVER BASED REDUCED ORDER CONTROLLER DESIGN FOR LARGE SCALE LINEAR DISCRETE-TIME CONTROL SYSTEMS 8.1 INTRODUCTION 8.2 REDUCED ORDER MODEL DESIGN FOR LINEAR DISCRETE-TIME CONTROL SYSTEMS 8.3
CHAPTER 8 OBSERVER BASED REDUCED ORDER CONTROLLER DESIGN FOR LARGE SCALE LINEAR DISCRETE-TIME CONTROL SYSTEMS 8.1 INTRODUCTION 8.2 REDUCED ORDER MODEL DESIGN FOR LINEAR DISCRETE-TIME CONTROL SYSTEMS 8.3
SMALL-SIGNAL STABILITY ASSESSMENT OF THE EUROPEAN POWER SYSTEM BASED ON ADVANCED NEURAL NETWORK METHOD
 SMALL-SIGNAL STABILITY ASSESSMENT OF THE EUROPEAN POWER SYSTEM BASED ON ADVANCED NEURAL NETWORK METHOD S.P. Teeuwen, I. Erlich U. Bachmann Univerity of Duiburg, Germany Department of Electrical Power Sytem
SMALL-SIGNAL STABILITY ASSESSMENT OF THE EUROPEAN POWER SYSTEM BASED ON ADVANCED NEURAL NETWORK METHOD S.P. Teeuwen, I. Erlich U. Bachmann Univerity of Duiburg, Germany Department of Electrical Power Sytem
Lecture 23 Date:
 Lecture 3 Date: 4.4.16 Plane Wave in Free Space and Good Conductor Power and Poynting Vector Wave Propagation in Loy Dielectric Wave propagating in z-direction and having only x-component i given by: E
Lecture 3 Date: 4.4.16 Plane Wave in Free Space and Good Conductor Power and Poynting Vector Wave Propagation in Loy Dielectric Wave propagating in z-direction and having only x-component i given by: E
USING NONLINEAR CONTROL ALGORITHMS TO IMPROVE THE QUALITY OF SHAKING TABLE TESTS
 October 12-17, 28, Beijing, China USING NONLINEAR CONTR ALGORITHMS TO IMPROVE THE QUALITY OF SHAKING TABLE TESTS T.Y. Yang 1 and A. Schellenberg 2 1 Pot Doctoral Scholar, Dept. of Civil and Env. Eng.,
October 12-17, 28, Beijing, China USING NONLINEAR CONTR ALGORITHMS TO IMPROVE THE QUALITY OF SHAKING TABLE TESTS T.Y. Yang 1 and A. Schellenberg 2 1 Pot Doctoral Scholar, Dept. of Civil and Env. Eng.,
Simple Observer Based Synchronization of Lorenz System with Parametric Uncertainty
 IOSR Journal of Electrical and Electronic Engineering (IOSR-JEEE) ISSN: 78-676Volume, Iue 6 (Nov. - Dec. 0), PP 4-0 Simple Oberver Baed Synchronization of Lorenz Sytem with Parametric Uncertainty Manih
IOSR Journal of Electrical and Electronic Engineering (IOSR-JEEE) ISSN: 78-676Volume, Iue 6 (Nov. - Dec. 0), PP 4-0 Simple Oberver Baed Synchronization of Lorenz Sytem with Parametric Uncertainty Manih
III.9. THE HYSTERESIS CYCLE OF FERROELECTRIC SUBSTANCES
 III.9. THE HYSTERESIS CYCLE OF FERROELECTRIC SBSTANCES. Work purpoe The analyi of the behaviour of a ferroelectric ubtance placed in an eternal electric field; the dependence of the electrical polariation
III.9. THE HYSTERESIS CYCLE OF FERROELECTRIC SBSTANCES. Work purpoe The analyi of the behaviour of a ferroelectric ubtance placed in an eternal electric field; the dependence of the electrical polariation
A Constraint Propagation Algorithm for Determining the Stability Margin. The paper addresses the stability margin assessment for linear systems
 A Contraint Propagation Algorithm for Determining the Stability Margin of Linear Parameter Circuit and Sytem Lubomir Kolev and Simona Filipova-Petrakieva Abtract The paper addree the tability margin aement
A Contraint Propagation Algorithm for Determining the Stability Margin of Linear Parameter Circuit and Sytem Lubomir Kolev and Simona Filipova-Petrakieva Abtract The paper addree the tability margin aement
Simulation and Analysis of Linear Permanent Magnet Vernier Motors for Direct Drive Systems
 Available online at www.ijpe-online.com vol. 3, no. 8, December 07, pp. 304-3 DOI: 0.3940/ijpe.7.08.p.3043 Simulation and Analyi of Linear Permanent Magnet Vernier Motor for Direct Drive Sytem Mingjie
Available online at www.ijpe-online.com vol. 3, no. 8, December 07, pp. 304-3 DOI: 0.3940/ijpe.7.08.p.3043 Simulation and Analyi of Linear Permanent Magnet Vernier Motor for Direct Drive Sytem Mingjie
Induction Motor Drive
 Induction Motor Drive 1. Brief review of IM theory.. IM drive characteritic with: Variable input voltage Variable rotor reitance Variable rotor power Variable voltage and variable frequency, VVVF drive
Induction Motor Drive 1. Brief review of IM theory.. IM drive characteritic with: Variable input voltage Variable rotor reitance Variable rotor power Variable voltage and variable frequency, VVVF drive
Finding the location of switched capacitor banks in distribution systems based on wavelet transform
 UPEC00 3t Aug - 3rd Sept 00 Finding the location of witched capacitor bank in ditribution ytem baed on wavelet tranform Bahram nohad Shahid Chamran Univerity in Ahvaz bahramnohad@yahoo.com Mehrdad keramatzadeh
UPEC00 3t Aug - 3rd Sept 00 Finding the location of witched capacitor bank in ditribution ytem baed on wavelet tranform Bahram nohad Shahid Chamran Univerity in Ahvaz bahramnohad@yahoo.com Mehrdad keramatzadeh
Stability. ME 344/144L Prof. R.G. Longoria Dynamic Systems and Controls/Lab. Department of Mechanical Engineering The University of Texas at Austin
 Stability The tability of a ytem refer to it ability or tendency to eek a condition of tatic equilibrium after it ha been diturbed. If given a mall perturbation from the equilibrium, it i table if it return.
Stability The tability of a ytem refer to it ability or tendency to eek a condition of tatic equilibrium after it ha been diturbed. If given a mall perturbation from the equilibrium, it i table if it return.
Reliability Analysis of Embedded System with Different Modes of Failure Emphasizing Reboot Delay
 International Journal of Applied Science and Engineering 3., 4: 449-47 Reliability Analyi of Embedded Sytem with Different Mode of Failure Emphaizing Reboot Delay Deepak Kumar* and S. B. Singh Department
International Journal of Applied Science and Engineering 3., 4: 449-47 Reliability Analyi of Embedded Sytem with Different Mode of Failure Emphaizing Reboot Delay Deepak Kumar* and S. B. Singh Department
The stabilization interval system of a tethered descent underwater vehicle
 IOP Conference Serie: Material Science and Engineering PAPER OPEN ACCESS The tabilization interval ytem of a tethered decent underwater vehicle To cite thi article: S A Gayvoronkiy et al 016 IOP Conf.
IOP Conference Serie: Material Science and Engineering PAPER OPEN ACCESS The tabilization interval ytem of a tethered decent underwater vehicle To cite thi article: S A Gayvoronkiy et al 016 IOP Conf.
Final Comprehensive Exam Physical Mechanics Friday December 15, Total 100 Points Time to complete the test: 120 minutes
 Final Comprehenive Exam Phyical Mechanic Friday December 15, 000 Total 100 Point Time to complete the tet: 10 minute Pleae Read the Quetion Carefully and Be Sure to Anwer All Part! In cae that you have
Final Comprehenive Exam Phyical Mechanic Friday December 15, 000 Total 100 Point Time to complete the tet: 10 minute Pleae Read the Quetion Carefully and Be Sure to Anwer All Part! In cae that you have
APPLICATION OF THE SINGLE IMPACT MICROINDENTATION FOR NON- DESTRUCTIVE TESTING OF THE FRACTURE TOUGHNESS OF NONMETALLIC AND POLYMERIC MATERIALS
 APPLICATION OF THE SINGLE IMPACT MICROINDENTATION FOR NON- DESTRUCTIVE TESTING OF THE FRACTURE TOUGHNESS OF NONMETALLIC AND POLYMERIC MATERIALS REN A. P. INSTITUTE OF APPLIED PHYSICS OF THE NATIONAL ACADEMY
APPLICATION OF THE SINGLE IMPACT MICROINDENTATION FOR NON- DESTRUCTIVE TESTING OF THE FRACTURE TOUGHNESS OF NONMETALLIC AND POLYMERIC MATERIALS REN A. P. INSTITUTE OF APPLIED PHYSICS OF THE NATIONAL ACADEMY
Question 1 Equivalent Circuits
 MAE 40 inear ircuit Fall 2007 Final Intruction ) Thi exam i open book You may ue whatever written material you chooe, including your cla note and textbook You may ue a hand calculator with no communication
MAE 40 inear ircuit Fall 2007 Final Intruction ) Thi exam i open book You may ue whatever written material you chooe, including your cla note and textbook You may ue a hand calculator with no communication
The Hassenpflug Matrix Tensor Notation
 The Haenpflug Matrix Tenor Notation D.N.J. El Dept of Mech Mechatron Eng Univ of Stellenboch, South Africa e-mail: dnjel@un.ac.za 2009/09/01 Abtract Thi i a ample document to illutrate the typeetting of
The Haenpflug Matrix Tenor Notation D.N.J. El Dept of Mech Mechatron Eng Univ of Stellenboch, South Africa e-mail: dnjel@un.ac.za 2009/09/01 Abtract Thi i a ample document to illutrate the typeetting of
Fractional-Order PI Speed Control of a Two-Mass Drive System with Elastic Coupling
 Fractional-Order PI Speed Control of a Two-Ma Drive Sytem with Elatic Coupling Mohammad Amin Rahimian, Mohammad Saleh Tavazoei, and Farzad Tahami Electrical Engineering Department, Sharif Univerity of
Fractional-Order PI Speed Control of a Two-Ma Drive Sytem with Elatic Coupling Mohammad Amin Rahimian, Mohammad Saleh Tavazoei, and Farzad Tahami Electrical Engineering Department, Sharif Univerity of
ASPECTS OF ANALYSIS OF REVERSE FRICTION - CAUSED CONTACT PHENOMENA
 ASPECTS OF ANALYSIS OF REVERSE FRICTION - CAUSED CONTACT PHENOMENA Paweł PIEC, Cracow Univerity of Technology, Cracow, Poland Staniław PYTKO, Univerity of Mining and Metallurgy, Cracow, Poland S u m m
ASPECTS OF ANALYSIS OF REVERSE FRICTION - CAUSED CONTACT PHENOMENA Paweł PIEC, Cracow Univerity of Technology, Cracow, Poland Staniław PYTKO, Univerity of Mining and Metallurgy, Cracow, Poland S u m m
THE IDENTIFICATION OF THE OPERATING REGIMES OF THE CONTROLLERS BY THE HELP OF THE PHASE TRAJECTORY
 Mariu M. B LA Aurel Vlaicu Univerity of Arad, Engineering Faculty Bd. Revolu iei nr. 77, 3030, Arad, Romania, E-mail: mariu.bala@ieee.org THE IDENTIFICATION OF THE OPERATING REGIMES OF THE CONTROLLERS
Mariu M. B LA Aurel Vlaicu Univerity of Arad, Engineering Faculty Bd. Revolu iei nr. 77, 3030, Arad, Romania, E-mail: mariu.bala@ieee.org THE IDENTIFICATION OF THE OPERATING REGIMES OF THE CONTROLLERS
Hybrid Projective Dislocated Synchronization of Liu Chaotic System Based on Parameters Identification
 www.ccenet.org/ma Modern Applied Science Vol. 6, No. ; February Hybrid Projective Dilocated Synchronization of Liu Chaotic Sytem Baed on Parameter Identification Yanfei Chen College of Science, Guilin
www.ccenet.org/ma Modern Applied Science Vol. 6, No. ; February Hybrid Projective Dilocated Synchronization of Liu Chaotic Sytem Baed on Parameter Identification Yanfei Chen College of Science, Guilin
ME 141. Engineering Mechanics
 ME 141 Engineering Mechanic Lecture 14: Plane motion of rigid bodie: Force and acceleration Ahmad Shahedi Shakil Lecturer, Dept. of Mechanical Engg, BUET E-mail: hakil@me.buet.ac.bd, hakil6791@gmail.com
ME 141 Engineering Mechanic Lecture 14: Plane motion of rigid bodie: Force and acceleration Ahmad Shahedi Shakil Lecturer, Dept. of Mechanical Engg, BUET E-mail: hakil@me.buet.ac.bd, hakil6791@gmail.com
Horizontal Biaxial Loading Tests on Sliding Lead Rubber Bearing System
 Horizontal Biaxial Loading Tet on Sliding Lead Rubber Bearing Sytem M. Yamamoto, H. Hamaguchi & N. Kamohita Takenaka Reearch and Development Intitute, Japan. M. Kikuchi & K. Ihii Hokkaido Univerity, Japan.
Horizontal Biaxial Loading Tet on Sliding Lead Rubber Bearing Sytem M. Yamamoto, H. Hamaguchi & N. Kamohita Takenaka Reearch and Development Intitute, Japan. M. Kikuchi & K. Ihii Hokkaido Univerity, Japan.
Molecular Dynamics Simulations of Nonequilibrium Effects Associated with Thermally Activated Exothermic Reactions
 Original Paper orma, 5, 9 7, Molecular Dynamic Simulation of Nonequilibrium Effect ociated with Thermally ctivated Exothermic Reaction Jerzy GORECKI and Joanna Natalia GORECK Intitute of Phyical Chemitry,
Original Paper orma, 5, 9 7, Molecular Dynamic Simulation of Nonequilibrium Effect ociated with Thermally ctivated Exothermic Reaction Jerzy GORECKI and Joanna Natalia GORECK Intitute of Phyical Chemitry,
µ-analysis OF INDIRECT SELF CONTROL OF AN INDUCTION MACHINE Henrik Mosskull
 -ANALYSIS OF INDIRECT SELF CONTROL OF AN INDUCTION MACHINE Henrik Mokull Bombardier Tranportation, SE-7 7 Väterå, Sweden S, Automatic Control, KTH, SE- Stockholm, Sweden Abtract: Robut tability and performance
-ANALYSIS OF INDIRECT SELF CONTROL OF AN INDUCTION MACHINE Henrik Mokull Bombardier Tranportation, SE-7 7 Väterå, Sweden S, Automatic Control, KTH, SE- Stockholm, Sweden Abtract: Robut tability and performance
ME 375 EXAM #1 Tuesday February 21, 2006
 ME 375 EXAM #1 Tueday February 1, 006 Diviion Adam 11:30 / Savran :30 (circle one) Name Intruction (1) Thi i a cloed book examination, but you are allowed one 8.5x11 crib heet. () You have one hour to
ME 375 EXAM #1 Tueday February 1, 006 Diviion Adam 11:30 / Savran :30 (circle one) Name Intruction (1) Thi i a cloed book examination, but you are allowed one 8.5x11 crib heet. () You have one hour to
THE PARAMETERIZATION OF ALL TWO-DEGREES-OF-FREEDOM SEMISTRONGLY STABILIZING CONTROLLERS. Tatsuya Hoshikawa, Kou Yamada and Yuko Tatsumi
 International Journal of Innovative Computing, Information Control ICIC International c 206 ISSN 349-498 Volume 2, Number 2, April 206 pp. 357 370 THE PARAMETERIZATION OF ALL TWO-DEGREES-OF-FREEDOM SEMISTRONGLY
International Journal of Innovative Computing, Information Control ICIC International c 206 ISSN 349-498 Volume 2, Number 2, April 206 pp. 357 370 THE PARAMETERIZATION OF ALL TWO-DEGREES-OF-FREEDOM SEMISTRONGLY
Introduction to Laplace Transform Techniques in Circuit Analysis
 Unit 6 Introduction to Laplace Tranform Technique in Circuit Analyi In thi unit we conider the application of Laplace Tranform to circuit analyi. A relevant dicuion of the one-ided Laplace tranform i found
Unit 6 Introduction to Laplace Tranform Technique in Circuit Analyi In thi unit we conider the application of Laplace Tranform to circuit analyi. A relevant dicuion of the one-ided Laplace tranform i found
Control of Delayed Integrating Processes Using Two Feedback Controllers R MS Approach
 Proceeding of the 7th WSEAS International Conference on SYSTEM SCIENCE and SIMULATION in ENGINEERING (ICOSSSE '8) Control of Delayed Integrating Procee Uing Two Feedback Controller R MS Approach LIBOR
Proceeding of the 7th WSEAS International Conference on SYSTEM SCIENCE and SIMULATION in ENGINEERING (ICOSSSE '8) Control of Delayed Integrating Procee Uing Two Feedback Controller R MS Approach LIBOR
Analysis of Step Response, Impulse and Ramp Response in the Continuous Stirred Tank Reactor System
 ISSN: 454-50 Volume 0 - Iue 05 May 07 PP. 7-78 Analyi of Step Repone, Impule and Ramp Repone in the ontinuou Stirred Tank Reactor Sytem * Zohreh Khohraftar, Pirouz Derakhhi, (Department of hemitry, Science
ISSN: 454-50 Volume 0 - Iue 05 May 07 PP. 7-78 Analyi of Step Repone, Impule and Ramp Repone in the ontinuou Stirred Tank Reactor Sytem * Zohreh Khohraftar, Pirouz Derakhhi, (Department of hemitry, Science
A VIBRATION ISOLATION SYSTEM USING STIFFNESS VARIATION CAPABILITY OF ZERO-POWER CONTROL
 Proceeding of the International Conference on Mechanical Engineering 009 (ICME009) 6-8 December 009, Dhaka, Bangladeh ICME09-AM-0 A VIBRATION ISOLATION SYSTEM USING STIFFNESS VARIATION CAPABILITY OF ZERO-POWER
Proceeding of the International Conference on Mechanical Engineering 009 (ICME009) 6-8 December 009, Dhaka, Bangladeh ICME09-AM-0 A VIBRATION ISOLATION SYSTEM USING STIFFNESS VARIATION CAPABILITY OF ZERO-POWER
SERIES COMPENSATION: VOLTAGE COMPENSATION USING DVR (Lectures 41-48)
") Chapter 5 SERIES COMPENSATION: VOLTAGE COMPENSATION USING DVR (Lecture 41-48) 5.1 Introduction Power ytem hould enure good quality of electric power upply, which mean voltage and current waveform hould
Chapter 5 SERIES COMPENSATION: VOLTAGE COMPENSATION USING DVR (Lecture 41-48) 5.1 Introduction Power ytem hould enure good quality of electric power upply, which mean voltage and current waveform hould
Lateral vibration of footbridges under crowd-loading: Continuous crowd modeling approach
 ateral vibration of footbridge under crowd-loading: Continuou crowd modeling approach Joanna Bodgi, a, Silvano Erlicher,b and Pierre Argoul,c Intitut NAVIER, ENPC, 6 et 8 av. B. Pacal, Cité Decarte, Champ
ateral vibration of footbridge under crowd-loading: Continuou crowd modeling approach Joanna Bodgi, a, Silvano Erlicher,b and Pierre Argoul,c Intitut NAVIER, ENPC, 6 et 8 av. B. Pacal, Cité Decarte, Champ
IMPROVING CNC MACHINE TOOLS ACCURACY BY MEANS OF THE CIRCULAR TEST AND SIMULATION
 Proceeding in Manufacturing Sytem, Vol. 5 (00), No. 3 ISSN 067-938 IMPROVING CNC MACHINE TOOLS ACCURACY BY MEANS OF THE CIRCULAR TEST AND SIMULATION Radu-Eugen BREAZ, Octavian BOLOGA, Gabriel RACZ 3, Valentin
Proceeding in Manufacturing Sytem, Vol. 5 (00), No. 3 ISSN 067-938 IMPROVING CNC MACHINE TOOLS ACCURACY BY MEANS OF THE CIRCULAR TEST AND SIMULATION Radu-Eugen BREAZ, Octavian BOLOGA, Gabriel RACZ 3, Valentin
into a discrete time function. Recall that the table of Laplace/z-transforms is constructed by (i) selecting to get
 selecting to get") Lecture 25 Introduction to Some Matlab c2d Code in Relation to Sampled Sytem here are many way to convert a continuou time function, { h( t) ; t [0, )} into a dicrete time function { h ( k) ; k {0,,, }}
Lecture 25 Introduction to Some Matlab c2d Code in Relation to Sampled Sytem here are many way to convert a continuou time function, { h( t) ; t [0, )} into a dicrete time function { h ( k) ; k {0,,, }}
A Simple Approach to Synthesizing Naïve Quantized Control for Reference Tracking
 A Simple Approach to Syntheizing Naïve Quantized Control for Reference Tracking SHIANG-HUA YU Department of Electrical Engineering National Sun Yat-Sen Univerity 70 Lien-Hai Road, Kaohiung 804 TAIAN Abtract:
A Simple Approach to Syntheizing Naïve Quantized Control for Reference Tracking SHIANG-HUA YU Department of Electrical Engineering National Sun Yat-Sen Univerity 70 Lien-Hai Road, Kaohiung 804 TAIAN Abtract:
Bogoliubov Transformation in Classical Mechanics
 Bogoliubov Tranformation in Claical Mechanic Canonical Tranformation Suppoe we have a et of complex canonical variable, {a j }, and would like to conider another et of variable, {b }, b b ({a j }). How
Bogoliubov Tranformation in Claical Mechanic Canonical Tranformation Suppoe we have a et of complex canonical variable, {a j }, and would like to conider another et of variable, {b }, b b ({a j }). How
Journal of Advanced Mechanical Design, Systems, and Manufacturing
 Vol., No. 4, 8 Mathematical Model of Linear Motor Stage with Non-Linear Friction Characteritic * Satohi KANEKO **, Ryuta SATO *** and Maaomi TSUTSUMI **** **Pot graduate, Tokyo Univerity of Agriculture
Vol., No. 4, 8 Mathematical Model of Linear Motor Stage with Non-Linear Friction Characteritic * Satohi KANEKO **, Ryuta SATO *** and Maaomi TSUTSUMI **** **Pot graduate, Tokyo Univerity of Agriculture
Determination of the local contrast of interference fringe patterns using continuous wavelet transform
 Determination of the local contrat of interference fringe pattern uing continuou wavelet tranform Jong Kwang Hyok, Kim Chol Su Intitute of Optic, Department of Phyic, Kim Il Sung Univerity, Pyongyang,
Determination of the local contrat of interference fringe pattern uing continuou wavelet tranform Jong Kwang Hyok, Kim Chol Su Intitute of Optic, Department of Phyic, Kim Il Sung Univerity, Pyongyang,
Direct Torque Control of Saturated Induction Machine with and without speed sensor
 Journal of Advanced Reearch in Science and Technology ISSN: 2352-9989 Direct Torque Control of Saturated Induction Machine with and without peed enor Tahar Djellouli,2, Samir Moulahoum, Med Seghir Boucherit
Journal of Advanced Reearch in Science and Technology ISSN: 2352-9989 Direct Torque Control of Saturated Induction Machine with and without peed enor Tahar Djellouli,2, Samir Moulahoum, Med Seghir Boucherit
Liquid cooling
 SKiiPPACK no. 3 4 [ 1- exp (-t/ τ )] + [( P + P )/P ] R [ 1- exp (-t/ τ )] Z tha tot3 = R ν ν tot1 tot tot3 thaa-3 aa 3 ν= 1 3.3.6. Liquid cooling The following table contain the characteritic R ν and
SKiiPPACK no. 3 4 [ 1- exp (-t/ τ )] + [( P + P )/P ] R [ 1- exp (-t/ τ )] Z tha tot3 = R ν ν tot1 tot tot3 thaa-3 aa 3 ν= 1 3.3.6. Liquid cooling The following table contain the characteritic R ν and
715. Transients in the electromagnetic actuator with the controlled supplier
 75. Tranient in the electromagnetic actuator with the controlled upplier Broniław Tomczuk, Andrzej Waindok, Dawid Wajnert Opole Univerity of Technology, Department of Indutrial Electrical Engineering Prozkowka
75. Tranient in the electromagnetic actuator with the controlled upplier Broniław Tomczuk, Andrzej Waindok, Dawid Wajnert Opole Univerity of Technology, Department of Indutrial Electrical Engineering Prozkowka
FRTN10 Exercise 3. Specifications and Disturbance Models
 FRTN0 Exercie 3. Specification and Diturbance Model 3. A feedback ytem i hown in Figure 3., in which a firt-order proce if controlled by an I controller. d v r u 2 z C() P() y n Figure 3. Sytem in Problem
FRTN0 Exercie 3. Specification and Diturbance Model 3. A feedback ytem i hown in Figure 3., in which a firt-order proce if controlled by an I controller. d v r u 2 z C() P() y n Figure 3. Sytem in Problem
ISSN: [Basnet* et al., 6(3): March, 2017] Impact Factor: 4.116
![ISSN: [Basnet* et al., 6(3): March, 2017] Impact Factor: 4.116](/thumbs/95/123902996.jpg "ISSN: [Basnet* et al., 6(3): March, 2017] Impact Factor: 4.116") IJESR INERNAIONAL JOURNAL OF ENGINEERING SCIENCES & RESEARCH ECHNOLOGY DIREC ORQUE CONROLLED INDUCION MOOR DRIVE FOR ORQUE RIPPLE REDUCION Bigyan Banet Department of Electrical Engineering, ribhuvan Univerity,
IJESR INERNAIONAL JOURNAL OF ENGINEERING SCIENCES & RESEARCH ECHNOLOGY DIREC ORQUE CONROLLED INDUCION MOOR DRIVE FOR ORQUE RIPPLE REDUCION Bigyan Banet Department of Electrical Engineering, ribhuvan Univerity,
Given the following circuit with unknown initial capacitor voltage v(0): X(s) Immediately, we know that the transfer function H(s) is
: X(s) Immediately, we know that the transfer function H(s) is") EE 4G Note: Chapter 6 Intructor: Cheung More about ZSR and ZIR. Finding unknown initial condition: Given the following circuit with unknown initial capacitor voltage v0: F v0/ / Input xt 0Ω Output yt -
EE 4G Note: Chapter 6 Intructor: Cheung More about ZSR and ZIR. Finding unknown initial condition: Given the following circuit with unknown initial capacitor voltage v0: F v0/ / Input xt 0Ω Output yt -
Simulation Study on the Shock Properties of the Double-Degree-of-Freedom Cushioning Packaging System
 Proceeding of the 7th IAPRI World Conference on Packaging Simulation Study on the Shock Propertie of the Double-Degree-of-Freedom Cuhioning Packaging Sytem Xia Zhu, Qiaoqiao Yan, Xiaoling Yao, Junbin Chen,
Proceeding of the 7th IAPRI World Conference on Packaging Simulation Study on the Shock Propertie of the Double-Degree-of-Freedom Cuhioning Packaging Sytem Xia Zhu, Qiaoqiao Yan, Xiaoling Yao, Junbin Chen,
Direct Torque Control using Matrix Converters
 Chapter 5 Direct Torque Control uing Matrix Converter The Direct Torque Control (DTC) i a high-dynamic and high performance control technique for induction motor drive which ha been developed in the lat
Chapter 5 Direct Torque Control uing Matrix Converter The Direct Torque Control (DTC) i a high-dynamic and high performance control technique for induction motor drive which ha been developed in the lat
online learning Unit Workbook 4 RLC Transients
 online learning Pearon BTC Higher National in lectrical and lectronic ngineering (QCF) Unit 5: lectrical & lectronic Principle Unit Workbook 4 in a erie of 4 for thi unit Learning Outcome: RLC Tranient
online learning Pearon BTC Higher National in lectrical and lectronic ngineering (QCF) Unit 5: lectrical & lectronic Principle Unit Workbook 4 in a erie of 4 for thi unit Learning Outcome: RLC Tranient
Control Systems Engineering ( Chapter 7. Steady-State Errors ) Prof. Kwang-Chun Ho Tel: Fax:
 Prof. Kwang-Chun Ho Tel: Fax:") Control Sytem Engineering ( Chapter 7. Steady-State Error Prof. Kwang-Chun Ho kwangho@hanung.ac.kr Tel: 0-760-453 Fax:0-760-4435 Introduction In thi leon, you will learn the following : How to find the
Control Sytem Engineering ( Chapter 7. Steady-State Error Prof. Kwang-Chun Ho kwangho@hanung.ac.kr Tel: 0-760-453 Fax:0-760-4435 Introduction In thi leon, you will learn the following : How to find the
Tuning of High-Power Antenna Resonances by Appropriately Reactive Sources
 Senor and Simulation Note Note 50 Augut 005 Tuning of High-Power Antenna Reonance by Appropriately Reactive Source Carl E. Baum Univerity of New Mexico Department of Electrical and Computer Engineering
Senor and Simulation Note Note 50 Augut 005 Tuning of High-Power Antenna Reonance by Appropriately Reactive Source Carl E. Baum Univerity of New Mexico Department of Electrical and Computer Engineering
Numerical simulation of sheet metal formability tests
 Numerical imulation of heet metal formability tet Ricardo Martin a a Intituto Superior Técnico, UniveridadedeLiboa, Liboa, Portugal ricardo.pedra.martin@tecnico.uliboa.pt Abtract One of the challenge faced
Numerical imulation of heet metal formability tet Ricardo Martin a a Intituto Superior Técnico, UniveridadedeLiboa, Liboa, Portugal ricardo.pedra.martin@tecnico.uliboa.pt Abtract One of the challenge faced
Chapter 13. Root Locus Introduction
 Chapter 13 Root Locu 13.1 Introduction In the previou chapter we had a glimpe of controller deign iue through ome imple example. Obviouly when we have higher order ytem, uch imple deign technique will
Chapter 13 Root Locu 13.1 Introduction In the previou chapter we had a glimpe of controller deign iue through ome imple example. Obviouly when we have higher order ytem, uch imple deign technique will
A Simplified Methodology for the Synthesis of Adaptive Flight Control Systems
 A Simplified Methodology for the Synthei of Adaptive Flight Control Sytem J.ROUSHANIAN, F.NADJAFI Department of Mechanical Engineering KNT Univerity of Technology 3Mirdamad St. Tehran IRAN Abtract- A implified
A Simplified Methodology for the Synthei of Adaptive Flight Control Sytem J.ROUSHANIAN, F.NADJAFI Department of Mechanical Engineering KNT Univerity of Technology 3Mirdamad St. Tehran IRAN Abtract- A implified
Compensation of friction and backlash effects in an electrical actuator
 SPECIAL ISSUE PAPER 1 Compenation of friction and backlah effect in an electrical actuator R Merzouki*, J C Cadiou and N M Sirdi Laboratoire de Robotique de Veraille, Vélizy, France Abtract: In thi paper,
SPECIAL ISSUE PAPER 1 Compenation of friction and backlah effect in an electrical actuator R Merzouki*, J C Cadiou and N M Sirdi Laboratoire de Robotique de Veraille, Vélizy, France Abtract: In thi paper,
SENSORLESS DIRECT TORQUE CONTROL OF RUSHLESS AC MACHINE USING LUENBERGER OBSERVER
 5-8 JATIT. All right reerved. SENSORLESS DIRECT TORQUE CONTROL OF RUSHLESS AC MACHINE USING LUENBERGER OBSERVER 1 Khalil. Nabti, K. Abed, H. Benalla 1, Student, Prof. Department of Electrical Engineering,
5-8 JATIT. All right reerved. SENSORLESS DIRECT TORQUE CONTROL OF RUSHLESS AC MACHINE USING LUENBERGER OBSERVER 1 Khalil. Nabti, K. Abed, H. Benalla 1, Student, Prof. Department of Electrical Engineering,
Root Locus Diagram. Root loci: The portion of root locus when k assume positive values: that is 0
 Objective Root Locu Diagram Upon completion of thi chapter you will be able to: Plot the Root Locu for a given Tranfer Function by varying gain of the ytem, Analye the tability of the ytem from the root
Objective Root Locu Diagram Upon completion of thi chapter you will be able to: Plot the Root Locu for a given Tranfer Function by varying gain of the ytem, Analye the tability of the ytem from the root
Time [seconds]
![Time [seconds]](/thumbs/92/109361387.jpg "Time [seconds]") .003 Fall 1999 Solution of Homework Aignment 4 1. Due to the application of a 1.0 Newton tep-force, the ytem ocillate at it damped natural frequency! d about the new equilibrium poition y k =. From the
.003 Fall 1999 Solution of Homework Aignment 4 1. Due to the application of a 1.0 Newton tep-force, the ytem ocillate at it damped natural frequency! d about the new equilibrium poition y k =. From the
EE 4443/5329. LAB 3: Control of Industrial Systems. Simulation and Hardware Control (PID Design) The Inverted Pendulum. (ECP Systems-Model: 505)
 The Inverted Pendulum. (ECP Systems-Model: 505)") EE 4443/5329 LAB 3: Control of Indutrial Sytem Simulation and Hardware Control (PID Deign) The Inverted Pendulum (ECP Sytem-Model: 505) Compiled by: Nitin Swamy Email: nwamy@lakehore.uta.edu Email: okuljaca@lakehore.uta.edu
EE 4443/5329 LAB 3: Control of Indutrial Sytem Simulation and Hardware Control (PID Deign) The Inverted Pendulum (ECP Sytem-Model: 505) Compiled by: Nitin Swamy Email: nwamy@lakehore.uta.edu Email: okuljaca@lakehore.uta.edu
Axial Unbalanced Magnetic Force in a Permanent Magnet Motor Due to a Skewed Magnet and Rotor Eccentricities
 IEEE TRANSACTIONS ON MAGNETICS, VOL. 53, NO. 11, NOVEMBER 217 82155 Axial Unbalanced Magnetic Force in a Permanent Magnet Motor Due to a Skewed Magnet and Rotor Eccentricitie Chi Ho Kang, Kyung Jin Kang,
IEEE TRANSACTIONS ON MAGNETICS, VOL. 53, NO. 11, NOVEMBER 217 82155 Axial Unbalanced Magnetic Force in a Permanent Magnet Motor Due to a Skewed Magnet and Rotor Eccentricitie Chi Ho Kang, Kyung Jin Kang,
Performance Improvement of Direct Torque Controlled Interior Permanent Magnet Synchronous Motor Drive by Considering Magnetic Saturation
 Performance Improvement of Direct Torque Controlled Interior Permanent Magnet Synchronou Motor Drive by Conidering Magnetic Saturation Behrooz Majidi * Jafar Milimonfared * Kaveh Malekian * *Amirkabir
Performance Improvement of Direct Torque Controlled Interior Permanent Magnet Synchronou Motor Drive by Conidering Magnetic Saturation Behrooz Majidi * Jafar Milimonfared * Kaveh Malekian * *Amirkabir
Sensorless speed control including zero speed of non salient PM synchronous drives
 BULLETIN OF THE POLISH ACADEMY OF SCIENCES TECHNICAL SCIENCES Vol. 54, No. 3, 2006 Senorle peed control including zero peed of non alient PM ynchronou drive H. RASMUSSEN Aalborg Univerity, Fredrik Bajer
BULLETIN OF THE POLISH ACADEMY OF SCIENCES TECHNICAL SCIENCES Vol. 54, No. 3, 2006 Senorle peed control including zero peed of non alient PM ynchronou drive H. RASMUSSEN Aalborg Univerity, Fredrik Bajer
EE/ME/AE324: Dynamical Systems. Chapter 8: Transfer Function Analysis
 EE/ME/AE34: Dynamical Sytem Chapter 8: Tranfer Function Analyi The Sytem Tranfer Function Conider the ytem decribed by the nth-order I/O eqn.: ( n) ( n 1) ( m) y + a y + + a y = b u + + bu n 1 0 m 0 Taking
EE/ME/AE34: Dynamical Sytem Chapter 8: Tranfer Function Analyi The Sytem Tranfer Function Conider the ytem decribed by the nth-order I/O eqn.: ( n) ( n 1) ( m) y + a y + + a y = b u + + bu n 1 0 m 0 Taking
CRACK TIP STRESS FIELDS FOR ANISOTROPIC MATERIALS WITH CUBIC SYMMETRY
 CRACK TIP TRE FIELD FOR ANIOTROPIC MATERIAL WITH CUBIC YMMETRY D.E. Lempidaki, N.P. O Dowd, E.P. Buo Department of Mechanical Engineering, Imperial College London, outh Kenington Campu, London, W7 AZ United
CRACK TIP TRE FIELD FOR ANIOTROPIC MATERIAL WITH CUBIC YMMETRY D.E. Lempidaki, N.P. O Dowd, E.P. Buo Department of Mechanical Engineering, Imperial College London, outh Kenington Campu, London, W7 AZ United
Advanced Smart Cruise Control with Safety Distance Considered Road Friction Coefficient
 International Journal of Computer Theory and Engineering, Vol. 8, No. 3, June 06 Advanced Smart Cruie Control with Safety Ditance Conidered Road Friction Coefficient Doui Hong, Chanho Park, Yongho Yoo,
International Journal of Computer Theory and Engineering, Vol. 8, No. 3, June 06 Advanced Smart Cruie Control with Safety Ditance Conidered Road Friction Coefficient Doui Hong, Chanho Park, Yongho Yoo,
Neural Network Linearization of Pressure Force Sensor Transfer Characteristic
 Acta Polytechnica Hungarica Vol., No., 006 Neural Network Linearization of Preure Force Senor Tranfer Characteritic Jozef Vojtko, Irena Kováčová, Ladilav Madaráz, Dobrolav Kováč Faculty of Electrical Engineering
Acta Polytechnica Hungarica Vol., No., 006 Neural Network Linearization of Preure Force Senor Tranfer Characteritic Jozef Vojtko, Irena Kováčová, Ladilav Madaráz, Dobrolav Kováč Faculty of Electrical Engineering