Contents Kreatryx. All Rights Reserved.
|
|
|
- Katrina Montgomery
- 5 years ago
- Views:
Transcription
1
2 Cotets Maual for K-Notes... Basics of Cotrol Systems... 3 Sigal Flow Graphs... 7 Time Respose Aalysis... 0 Cotrol System Stability... 6 Root locus Techique... 8 Frequecy Domai Aalysis... Bode Plots... 5 Desigs of Cotrol systems... 8 State Variable Aalysis Kreatryx. All Rights Reserved.
3 Maual for K-Notes Why K-Notes? Towards the ed of preparatio, a studet has lost the time to revise all the chapters from his / her class otes / stadard text books. This is the reaso why K-Notes is specifically iteded for Quick Revisio ad should ot be cosidered as comprehesive study material. What are K-Notes? A 40 page or less otebook for each subject which cotais all cocepts covered i GATE Curriculum i a cocise maer to aid a studet i fial stages of his/her preparatio. It is highly useful for both the studets as well as workig professioals who are preparig for GATE as it comes hady while travelig log distaces. Whe do I start usig K-Notes? It is highly recommeded to use K-Notes i the last moths before GATE Exam (November ed owards). How do I use K-Notes? Oce you fiish the etire K-Notes for a particular subject, you should practice the respective Subject Test / Mixed Questio Bag cotaiig questios from all the Chapters to make best use of it. 04 Kreatryx. All Rights Reserved.


 dx F Md dt M dt t () F K x x K v v dt dx")
4 Basics of Cotrol Systems The cotrol system is that meas by which ay quatity of iterest i a machie, mechaism or other equatio is maitaied or altered i accordace which a desired maer. Mathematical Modelig The Differetial Equatio of the system is formed by replacig each elemet by correspodig differetial equatio. For Mechaical systems () dx F Md dt M dt t () F K x x K v v dt dx (3) dx F f v v f dt dt 3

5 (4) Jd T dt Jd dt (5) Jd T dt Jd dt (6) T K K dt t Aalogy betwee Electrical & Mechaical systems Force (Torque) Voltage Aalogy Traslatio system Rotatioal system Electrical system Force F Torque T Voltage e Mass M Momet of Iertia J Iductace L Visuals Frictio coefficiet f Viscous Frictio coefficiet f Resistat R Sprig stiffess K Tesioal sprig stiffess K Reciprocal of capacitace C Displacemet x Agular Displacemet Charge q Velocity Agular velocity Curret i Force (Torque) curret Aalogy Traslatio system Rotatioal system Electrical system Force F Torque T Curret i Mass M Momet of Iertia J Capacitace C Visuals Frictio coefficiet f Viscous Frictio coefficiet f Reciprocal of Resistat /R Sprig stiffess K Tesioal sprig stiffess K Reciprocal of Iductace L Displacemet x Agular Displacemet Magetic flux likage Velocity Agular Velocity Voltage e 4


6 Trasfer fuctio The differetial equatio for this system is d x dx F M f kx dt dt Take Laplace Trasform both sides F(s) = Ms Xs fsx s kx s X Fs Ms fs k [Assumig zero iitial coditios] Trasfer fuctio of the system Trasfer fuctio is ratio of Laplace Trasform of output variable to Laplace Trasform of iput variable. The steady state-respose of a cotrol system to a siusoidal iput is obtaied by replacig s with jw i the trasfer fuctio of the system. X jw M jw f jw k F jw w M jwf+k Block Diagram Algebra The system ca also be represeted graphical with the help of block diagram. Various blocks ca be replaced by a sigal block to simplify the block diagram. => => 5
7 => => => => 6

8 Sigal Flow Graphs Node: it represets a system variable which is equal to sum of all icomig sigals at the ode. Outgoig sigals do ot affect value of ode. Brach: A sigal travels alog a brach from oe ode to aother i the directio idicated by the brach arrow & i the process gets multiplied by gai or trasmittace of brach Forward Path: Path from iput ode to output ode. No-Touchig loop: Loops that do ot have ay commo ode. Maso s Gai Formula Ratio of output to iput variable of a sigal flow graph is called et gai. T P k P k P mr K K k = path gai of k th forward path = determiat of graph = (sum of gai of idividual loops) + (sum of gai product of o touchig loops) (sum of gai product of 3 o touchig loops) + P P P... K m m m3 = gai product of all r o touchig loops. = the value of T = overall gai Example : for the part of graph ot touchig k th forward path. Forward Paths: P a a a a P aa3 a35 Loops : P a3a3 P a3a34 a4 P3 a 44 P a a a a P5 a3a35 a5 -No Touchig loops P a a a P a a a ;
 Negative feedback Gai = G GH G (gai decreases) Effect o")
9 a a a a a a a a a a a a a a a a a a a First forward path is i touch with all loops Secod forward path does ot touch oe loop a 44 P P T a a a a a a a a Effect of Feed back System before feedback System after feedback Effect o Gai Positive feedback Gai = G GH G (gai icreases) Negative feedback Gai = G GH G (gai decreases) Effect o Stability Feedback ca improve stability or be harmful to stability if ot applied properly. Eg. Gai = G GH & GH =, output is ifiite for all iputs. 8


10 Effect o sesitivity Sesitivity is the ratio of relative chage i output to relative chage i iput T T T LT SG G LG G For ope loop system T = G T G T G SG T G G For closed loop system G T GH T G T G GH SG T G G GH GH (Sesitivity decreases) Effect o Noise Feedback ca reduce the effect oise ad disturbace o system s performace. Ope loop system G Y S NS Closed loop system G YS G N S G G H (Effect of Noise Decreases) 9
 = Au(t) u(t) = ; t > 0 = 0; t < 0 R(s) = A s Ramp Sigal r(t) = At, t > 0 R(s) = = 0, t < 0 A s Parabolic")
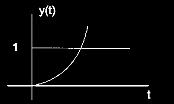
11 Positive feedback is mostly employed i oscillator whereas egative feedback is used i amplifiers. Time Respose Aalysis Stadard Test sigals Step sigal r(t) = Au(t) u(t) = ; t > 0 = 0; t < 0 R(s) = A s Ramp Sigal r(t) = At, t > 0 R(s) = = 0, t < 0 A s Parabolic sigal r(t) = At R(s) = = 0 ; t < 0 A s ; t > 0 3 Impulse t 0 ; t 0 t dt 0
 = T S Ts S Ts C(t) = e t T Uit Ramp iput R(s) = S C(s)")
 at s = 0.")
 = lim Gs")
12 Time Respose of first order systems Uit step iput R(s) = S C(s) = T S Ts S Ts C(t) = e t T Uit Ramp iput R(s) = S C(s) = S Ts C(t) = t T t e T Type of system ss Steady state error of system e depeds o umber of poles of G(s) at s = 0. This umber is kow as types of system Error Costats For uity feedback cotrol systems K P (positio error costat) = lim Gs s 0


13 K v (Velocity error costat) = lim s G s s 0 K a (Acceleratio error costat) = lim s G s s 0 Steady state error for uity feedback systems Type of Error Step iput Ramp iput Parabolic Iput system cos tats R R R j K K K K K K P K 0 K v 0 K a p v R K R 0 K R 0 0 K a For o-uity feedback systems, the differece betwee iput sigal R(s) ad feedback sigal B(s) actuatig error sigal Ea s R s G s H s e a ss lim sr s s 0 G s H s a E s. Trasiet Respose of secod order system Gs w S S+w w Y s R s s w s w Characteristic Equatio: For uit step iput Y s s s w s w 0 w s s w s w
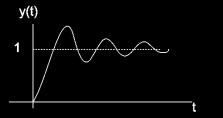
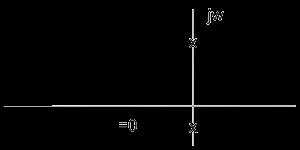
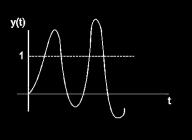
14 if < (uder damp) e wt y(t) = siw t d w w ; if = (critical damp) y(t) = ( + w t) d =ta e wt - if > (over damp) y(t) = cos h w t si h w t e wt Roots of characteristic equatio are s,s w jw w is dampig costat which govers decay of respose for uder damped system. = cos = 0, imagiary axis If correspods to udamped system or sustaied oscillatios 3

15 Pole zero plot Step Respose 4
16 Importat Characteristic of step Respose / Maximum overshoot : 00e % ta Rise Time : w Peak Time : w Settlig Time : t t s s 4 w 3 w (for % margi) (for 5% margi) Effect of Addig poles ad zeroes to Trasfer Fuctio. If a pole is added to forward trasfer fuctio of a closed loop system, it icreases maximum overshoot of the system.. If a pole is added to closed loop trasfer fuctio it has effect opposite to that of case. 3. If a zero is added to forward path trasfer fuctio of a closed loop system, it decreases rise time ad icreases maximum overshoot. 4. If a zero is added to closed loop system, rise time decreases but maximum overshoot decreases tha icreases as zero added moves towards origi. 5
17 Cotrol System Stability A liear, time-ivariat system is stable if followig otios of stability are satisfied: Whe system is excited by bouded iput, the output is bouded. I absece of iputs, output teds towards zero irrespective of iitial coditios. For system of first ad secod order, the positive ess of coefficiets of characteristic equatio is sufficiet coditio for stability. For higher order systems, it is ecessary but ot sufficiet coditio for stability. Routh stability criterio If is ecessary & sufficiet coditio that each term of first colum of Routh Array of its characteristic equatio is positive if a0 0. Number of sig chages i first colum = Number of roots i Right Half Plae. Example : s 0 a s a s... a 0 a 0 a a 4 s s 3 s a a 3 a 5. a a a a a a a a s a a a Special Cases Whe first term i ay row of the Routh Array is zero while the row has at least oe ozero term. Solutio : substitute a small positive umber for the zero & proceed to evaluate rest of Routh Array 6
18 eg. s 5 s 4 s 3 s 3s s 3 4 s 5 3 s s s 0 s 5 0, ad hece there are sig chage ad thus roots i right half plae. Whe all the elemets i ay oe row Routh Array are zero. Solutio : The polyomial whose coefficiets are the elemets of row just above row of zeroes i Routh Array is called auxiliary polyomial. o The order of auxiliary polyomial is always eve. o Row of zeroes should be replaced row of coefficiets of polyomial geerated by takig first derivative of auxiliary polyomial Example : s s 8s s 0s 6s s s 6 5 s s 6 4 s s 0 0 Auxiliary polyomial : A(s) = 6 s s s s 4 3 s 3 s 3 8 s 0 3 s 8 4 s 6s 8 0 7
19 Types of stability Limited stable : if o-repeated root of characteristic equatio lies o jw- axis. Absolutely stable: with respect to a parameter if it is stable for all value of this parameter. Coditioally stable : with respect to a parameter if system is stable for bouded rage of this parameter. Relative stability If stability with respect to a lie s is to be judged, the we replace s by z i characteristic equatio ad judge stability based o Routh criterio, applied o ew characteristic equatio. Root locus Techique Root Loci is importat to study trajectories of poles ad zeroes as the poles & zeroes determie trasiet respose & stability of the system. Characteristic equatio +G(s)H(s) =0 Assume G(s)H(s) = KG sh s KG sh s 0 G s H s K Coditio of Roots locus G sh s k k G s H s i K 0 = odd multiples of 80 G s H s i K 0 = eve multiples of 80 8
20 Coditio for a poit to lie o root Locus The differece betwee the sum of the agles of the vectors draw from the zeroes ad those from the poles of G(s) H(s) to s is o odd multiple of 80 if K > 0. The differece betwee the sum of the agles of the vectors draw from the zeroes & those from the poles of G(s)H(s) to s is a eve multiple of 80 icludig zero degrees. Properties of Roots loci of KG s H s 0. K = 0 poits : These poits are poles of G(s)H(s), icludig those at s =.. K = poit : The K = poits are the zeroes of G(s)H(s) icludig those at s =. 3. Total umbers of Root loci is equal to order of KG s H s 0 equatio. 4. The root loci are symmetrical about the axis of symmetry of the pole- zero cofiguratio G(s) H(s). 5. For large values of s, the RL (K > 0) are asymptotes with agles give by: i 80 i m for CRL(complemetary root loci) (K < 0) i i 80 m where i = 0,,,., m = o. of fiite poles of G(s) H(s) m = o. of fiite zeroes of G(s) H(s) 6. The itersectio of asymptotes lies o the real axis i s-plae. The poit of itersectio is called cetroid ( ) real parts of poles G(s)H(s) real parts of zeroes G(s)H(s) = m 7. Roots locus are foud i a sectio of the real axis oly if total umber of poles ad zeros to the right side of sectio is odd if K > 0. For CRL (K < 0), the umber of real poles & zeroes to right of give sectio is eve, the that sectio lies o root locus. 8. The agle of departure or arrival of roots loci at a pole or zero of G(s) H(s) say s is foud by removig term (s s ) from the trasfer fuctio ad replacig s by s i the remaiig trasfer fuctio to calculate Gs Hs 9
21 Agle of Departure (oly applicable for poles) = Gs Hs Agle of Arrival (oly applicable for zeroes) = Gs Hs 9. The crossig poit of root-loci o imagiary axis ca be foud by equatig coefficiet of s i Routh table to zero & calculatig K. The roots of auxiliary polyomial give itersectio of root locus with imagiary axis. 0. Break-away & Break-i poits These poits are determied by fidig roots of for breakaway poits : For break i poits : dk 0 ds dk ds 0 dk ds 0. Value of k o Root locus is K G s H s Additio of poles & zeroes to G(s) H(s) Additio of a pole to G(s) H(s) has the effect of pushig of roots loci toward right half plae. Additio of left half plae zeroes to the fuctio G(s) H(s) geerally has effect of movig & bedig the root loci toward the left half s-plae. 0

22 Frequecy Domai Aalysis Resoat Peak, M r It is the maximum value of M(jw) for secod order system Mr =, = dampig coefficiet Resoat frequecy, w r The resoat frequecy w r is the frequecy at which the peak M r occurs. r w w, for secod order system Badwidth, BW The badwidth is the frequecy at which M(jw) drops to 70.7% of, or 3dB dow from, its zero frequecy value. for secod order system, BW = 4 w 4 Note : For > 0.707, w r = 0 ad M r = so o peak. Effect of Addig poles ad zeroes to forward trasfer fuctio The geeral effect of addig a zero to the forward path trasfer fuctio is to icrease the badwidth of closed loop system. The effect of addig a pole to the forward path trasfer fuctio is to make the closed loop less stable, which decreasig the bad width. Nyquist stability criterio I additio to providig the absolute stability like the Routh Hurwitz criterio, the Nyquist criterio gives iformatio o relative stability of a stable system ad the degree of istability of a ustable system.

23 Stability coditio Ope loop stability If all poles of G(s) H(s) lie i left half plae. Closed loop stability If all roots of + G(s)H(s) = 0 lie i left half plae. Ecircled or Eclosed A poit of regio i a complex plae is said to be ecircled by a closed path if it is foud iside the path. A poit or regio is said to eclosed by a closed path if it is ecircled i the couter clockwise directio, or the poit or regio lies to the left of path. Nyquist Path If is a semi-circle that ecircles etire right half plae but it should ot pass through ay poles or zeroes of s GsHs & hece we draw small semi-circles aroud the poles & zeroes o jw-axis. Nyquist Criterio. The Nyquist path s is defied i s-plae, as show above.. The L(s) plot (G(s)H(s) plot) i L(s) plae is draw i.e., every poit correspodig value of L(s) = G(s)H(s). s plae is mapped to 3. The umber of ecirclemets N, of the ( + j0) poit made by L(s) plot is observed. 4. The Nyquist criterio is N= Z P N = umber of ecirclemet of the ( + j0) poit made by L(s) plot. Z = Number of zeroes of + L(s) that are iside Nyquist path (i.e., RHP) P = Number of poles of + L(s) that are iside Nyquiest path (i.e., RHP) ; poles of + L(s) are same as poles of L(s).
 i RHP but i clockwise directio. Nyquist criterio for Miimum phase system A miimum phase trasfer fuctio does ot have poles or zeroes i the right half s-plae or o axis excludig origi.")
24 For closed loop stability Z must equal 0 For ope loop stability, P must equal 0. for closed loop stability N = P i.e., Nyquist plot must ecircle ( + j0) poit as may times as o. of poles of L(s) i RHP but i clockwise directio. Nyquist criterio for Miimum phase system A miimum phase trasfer fuctio does ot have poles or zeroes i the right half s-plae or o axis excludig origi. For a closed loop system with loop trasfer fuctio L(s) that is of miimum phase type, the system is closed loop stable if the L(s) plot that correspods to the Nyquist path does ot ecircle ( + j0) poit it is ustable. i.e. N=0 Effect of additio of poles & zeroes to L(s) o shape of Nyquiest plot If L(s) = K T s Additio of poles at s = 0. Ls K s T s Both Head & Tail of Nyquist plot are rotated by 90 clockwise.. Ls K s T s 3
 icreases the phase of L(s) by 90 at w ad hece improves stability.")
 does ot itersect the egative real axis P L jw 0 GM = db GM > 0dB idicates stable system.")
25 3. Ls K 3 s T s Additio of fiite o-zero poles L s K T s T s Oly the head is moved clockwise by 90 but tail poit remais same. Additio of zeroes Additio of term T s i umerator of L(s) icreases the phase of L(s) by 90 at w ad hece improves stability. d Relative stability: Gai & Phase Margi Gai Margi Phase crossover frequecy is the frequecy at which the L(jw) plot itersect the egative real axis. L jw 80 or where gai margi = GM = P 0log 0 L jw if L(jw) does ot itersect the egative real axis P L jw 0 GM = db GM > 0dB idicates stable system. GM = 0dB idicates margially stable system. GM < 0dB idicates ustable system. Higher the value of GM, more stable the system is. P 4
26 Phase Margi It is defied as the agle i degrees through which L(jw) plot must be rotated about the origi so that gai crossover passes through (, j 0) poit. Gai crossover frequecy is w g s.t. g L jw Phase margi (PM) = g L jw 80 Bode Plots Bode plot cosist of two plots 0 log G jw vs log w w vs log w Assumig G s K Ts Ts s Tas s s e Ts d 0 0 G jw 0log G jw 0log K 0log jwt db 0log jwt 0log jw 0log jwt a w 0log w 0 j w w G jw jwt jwt jw jwta jw / w w jwtd rad w 5


27 Magitude & phase plot of various factor Factor Magitude plot Phase Plot K P jw jw P jwt a jwt a G jw j w w w w 6


28 Example : Bode plot for Gs G jw 0s 0 s s s 5 If w = jw jw jw jw 5 0 G jw ; For 0. < w < G jw For < w < w 5 w G jw jw jw 5 w G jw G jw 80 For 5 < w < jw jw jw w j 3 G jw For w > 0 G jw 70 0 jw 0 G jw jw jw jw G jw 80 ; slope = 0 db / dec ; G jw w ; G jw ; G jw Slope = 40 db/ dec Slope = 60 db/ dec slope = 40 db/ dec 7
29 Desigs of Cotrol systems P cotroller The trasfer fuctio of this cotroller is K P. The mai disadvatage i P cotroller is that as K P value icreases, hece overshoot icreases. As overshoot icreases system stability decreases. decreases & I cotroller The trasfer fuctio of this cotroller is k i s It itroduces a pole at origi ad hece type is icreased ad as type icreases, the SS error decrease but system stability is affected.. D cotroller It s purpose is to improve the stability. The trasfer fuctio of this cotroller is K DS. It itroduces a zero at origi so system type is decreased but steady state error icreases. PI cotroller It s purpose SS error without affectio stability. Trasfer fuctio = K P K s SK K i P i It adds pole at origi, so type icreases & SS error decreases. It adds a zero i LHP, so stability is ot affected. S Effects: o Improves dampig ad reduces maximum overshoot. o Icreases rise time. o Decreases BW. o Improves Gai Margi, Phase margi & Mr. o Filter out high frequecy oise. 8


30 PD cotroller Its purpose is to improve stability without affectig stability. Trasfer fuctio: K P K S D It adds a zero i LHP, so stability improved. Effects: o Improves dampig ad maximum overshoot. o Reduces rise time & settig time. o Icreases BW o Improves GM, PM, Mr. o May atteuate high frequecy oise. PID cotroller Its purpose is to improve stability as well as to decrease e ss. Ki Trasfer fuctio = KP skd s o If adds a pole at origi which icreases type & hece steady state error decreases. o If adds zeroes i LHP, oe fiite zero to avoid effect o stability & other zero to improve stability of system. Compesators Lead Compesator G e s c ; < ZS ZS = phase lead = ta w ta w For maximum phase shift ta m w = Geometric mea of corer frequecies = 9




31 Effect o o o It icreases Gai Crossover frequecy It reduces Badwidth. It reduces udamped frequecy. Lag compesators Ge Ge s jw s s jw jw For maximum phase shift w ; ta m Effect o o o Icrease gai of origial Network without affectig stability. Reduces steady state error. Reduces speed of respose. Lag lead compesator G e s S S S S > ; < G e jw jw jw jw jw / 30
32 State Variable Aalysis The state of a dyamical system is a miimal set of variables (kow as state variables) such that the kowledge of these variables at t = t 0 together with the kowledge of iput for t t 0 completely determie the behavior of system at t > t 0. State variable x(t) = x x.. x t t t ; y(t) = y y.. yp t t t ; u(t) = u t u t.. um t Equatios determiig system behavior : X(t) = A x (t) + Bu(t) ; State equatio y(t) = Cx (t) + Du (t) ; output equatio State Trasitio Matrix It is a matrix that satisfies the followig liear homogeous equatio. dx t Ax t dt Assumig Properties: t is state trasitio matrix t SI A ) 0 = I (idetity matrix) ) t t At 3 3 t e I At A t A t...! 3! 3) t t t t t t 0 0 4) t kt K for K > 0 Solutio of state equatio State Equatio: X(t) = A x(t) + Bu(t) X(t) = t At At e x 0 e Bud 0 3
33 Relatioship betwee state equatios ad Trasfer Fuctio X(t) = Ax (t) + Bu(t) Takig Laplace Trasform both sides sx(s) = Ax (s) + Bu(s) (SI A) X(s) = Bu(s) X(s) = (SI A) B u (s) y(t) = Cx(t) + D u(t) Take Laplace Trasform both sides. y(s) = Cx(s) + D u (s) x(s) = (si A) B u (s) y(s) = [C(SI A) B + D] U(s) y s Us C SI A B D = Trasfer fuctio Eige value of matrix A are the root of the characteristic equatio of the system. Characteristic equatio = SI A 0 Cotrollability & Observability A system is said to be cotrollable if a system ca be trasferred from oe state to aother i specified fiite time by cotrol iput u(t). A system is said to be completely observable if every state of system X idetified by observig the output y(t). i t ca be Test for cotrollability Q C = cotrollability matrix = [B AB A B A B] Here A is assumed to be a x matrix B is assumed to be a x matrix If det Q C = 0 system is ucotrollable det Q 0, system is cotrollable C 3
34 Test for observability Q 0 = observability matrix = C CA CA... C A A is a x matrix C is a ( x ) matrix If det Q0 0, system is uobservable det Q 0, system is observable 0 33

35
Chapter 2 Feedback Control Theory Continued
 Chapter Feedback Cotrol Theor Cotiued. Itroductio I the previous chapter, the respose characteristic of simple first ad secod order trasfer fuctios were studied. It was show that first order trasfer fuctio,
Chapter Feedback Cotrol Theor Cotiued. Itroductio I the previous chapter, the respose characteristic of simple first ad secod order trasfer fuctios were studied. It was show that first order trasfer fuctio,
Mechatronics. Time Response & Frequency Response 2 nd -Order Dynamic System 2-Pole, Low-Pass, Active Filter
 Time Respose & Frequecy Respose d -Order Dyamic System -Pole, Low-Pass, Active Filter R 4 R 7 C 5 e i R 1 C R 3 - + R 6 - + e out Assigmet: Perform a Complete Dyamic System Ivestigatio of the Two-Pole,
Time Respose & Frequecy Respose d -Order Dyamic System -Pole, Low-Pass, Active Filter R 4 R 7 C 5 e i R 1 C R 3 - + R 6 - + e out Assigmet: Perform a Complete Dyamic System Ivestigatio of the Two-Pole,
Course Outline. Designing Control Systems. Proportional Controller. Amme 3500 : System Dynamics and Control. Root Locus. Dr. Stefan B.
 Amme 3500 : System Dyamics ad Cotrol Root Locus Course Outlie Week Date Cotet Assigmet Notes Mar Itroductio 8 Mar Frequecy Domai Modellig 3 5 Mar Trasiet Performace ad the s-plae 4 Mar Block Diagrams Assig
Amme 3500 : System Dyamics ad Cotrol Root Locus Course Outlie Week Date Cotet Assigmet Notes Mar Itroductio 8 Mar Frequecy Domai Modellig 3 5 Mar Trasiet Performace ad the s-plae 4 Mar Block Diagrams Assig
EE Control Systems
 Copyright FL Lewis 7 All rights reserved Updated: Moday, November 1, 7 EE 4314 - Cotrol Systems Bode Plot Performace Specificatios The Bode Plot was developed by Hedrik Wade Bode i 1938 while he worked
Copyright FL Lewis 7 All rights reserved Updated: Moday, November 1, 7 EE 4314 - Cotrol Systems Bode Plot Performace Specificatios The Bode Plot was developed by Hedrik Wade Bode i 1938 while he worked
Answer: 1(A); 2(C); 3(A); 4(D); 5(B); 6(A); 7(C); 8(C); 9(A); 10(A); 11(A); 12(C); 13(C)
; 2(C); 3(A); 4(D); 5(B); 6(A); 7(C); 8(C); 9(A); 10(A); 11(A); 12(C); 13(C)") Aswer: (A); (C); 3(A); 4(D); 5(B); 6(A); 7(C); 8(C); 9(A); 0(A); (A); (C); 3(C). A two loop positio cotrol system is show below R(s) Y(s) + + s(s +) - - s The gai of the Tacho-geerator iflueces maily the
Aswer: (A); (C); 3(A); 4(D); 5(B); 6(A); 7(C); 8(C); 9(A); 0(A); (A); (C); 3(C). A two loop positio cotrol system is show below R(s) Y(s) + + s(s +) - - s The gai of the Tacho-geerator iflueces maily the
Chapter 4 : Laplace Transform
 4. Itroductio Laplace trasform is a alterative to solve the differetial equatio by the complex frequecy domai ( s = σ + jω), istead of the usual time domai. The DE ca be easily trasformed ito a algebraic
4. Itroductio Laplace trasform is a alterative to solve the differetial equatio by the complex frequecy domai ( s = σ + jω), istead of the usual time domai. The DE ca be easily trasformed ito a algebraic
2.004 Dynamics and Control II Spring 2008
 MIT OpeCourseWare http://ocw.mit.edu 2.004 Dyamics ad Cotrol II Sprig 2008 For iformatio about citig these materials or our Terms of Use, visit: http://ocw.mit.edu/terms. Massachusetts Istitute of Techology
MIT OpeCourseWare http://ocw.mit.edu 2.004 Dyamics ad Cotrol II Sprig 2008 For iformatio about citig these materials or our Terms of Use, visit: http://ocw.mit.edu/terms. Massachusetts Istitute of Techology
The z-transform. 7.1 Introduction. 7.2 The z-transform Derivation of the z-transform: x[n] = z n LTI system, h[n] z = re j
![The z-transform. 7.1 Introduction. 7.2 The z-transform Derivation of the z-transform: x[n] = z n LTI system, h[n] z = re j](/thumbs/82/85448534.jpg "The z-transform. 7.1 Introduction. 7.2 The z-transform Derivation of the z-transform: x[n] = z n LTI system, h[n] z = re j") The -Trasform 7. Itroductio Geeralie the complex siusoidal represetatio offered by DTFT to a represetatio of complex expoetial sigals. Obtai more geeral characteristics for discrete-time LTI systems. 7.
The -Trasform 7. Itroductio Geeralie the complex siusoidal represetatio offered by DTFT to a represetatio of complex expoetial sigals. Obtai more geeral characteristics for discrete-time LTI systems. 7.
(c) Write, but do not evaluate, an integral expression for the volume of the solid generated when R is
 Write, but do not evaluate, an integral expression for the volume of the solid generated when R is") Calculus BC Fial Review Name: Revised 7 EXAM Date: Tuesday, May 9 Remiders:. Put ew batteries i your calculator. Make sure your calculator is i RADIAN mode.. Get a good ight s sleep. Eat breakfast. Brig:
Calculus BC Fial Review Name: Revised 7 EXAM Date: Tuesday, May 9 Remiders:. Put ew batteries i your calculator. Make sure your calculator is i RADIAN mode.. Get a good ight s sleep. Eat breakfast. Brig:
3. Z Transform. Recall that the Fourier transform (FT) of a DT signal xn [ ] is ( ) [ ] = In order for the FT to exist in the finite magnitude sense,
![3. Z Transform. Recall that the Fourier transform (FT) of a DT signal xn [ ] is ( ) [ ] = In order for the FT to exist in the finite magnitude sense,](/thumbs/82/85448051.jpg "3. Z Transform. Recall that the Fourier transform (FT) of a DT signal xn [ ] is ( ) [ ] = In order for the FT to exist in the finite magnitude sense,") 3. Z Trasform Referece: Etire Chapter 3 of text. Recall that the Fourier trasform (FT) of a DT sigal x [ ] is ω ( ) [ ] X e = j jω k = xe I order for the FT to exist i the fiite magitude sese, S = x [
3. Z Trasform Referece: Etire Chapter 3 of text. Recall that the Fourier trasform (FT) of a DT sigal x [ ] is ω ( ) [ ] X e = j jω k = xe I order for the FT to exist i the fiite magitude sese, S = x [
Dynamic Response of Linear Systems
 Dyamic Respose of Liear Systems Liear System Respose Superpositio Priciple Resposes to Specific Iputs Dyamic Respose of st Order Systems Characteristic Equatio - Free Respose Stable st Order System Respose
Dyamic Respose of Liear Systems Liear System Respose Superpositio Priciple Resposes to Specific Iputs Dyamic Respose of st Order Systems Characteristic Equatio - Free Respose Stable st Order System Respose
CHAPTER NINE. Frequency Response Methods
 CHAPTER NINE 9. Itroductio It as poited earlier that i practice the performace of a feedback cotrol system is more preferably measured by its time - domai respose characteristics. This is i cotrast to
CHAPTER NINE 9. Itroductio It as poited earlier that i practice the performace of a feedback cotrol system is more preferably measured by its time - domai respose characteristics. This is i cotrast to
Introduction to Signals and Systems, Part V: Lecture Summary
 EEL33: Discrete-Time Sigals ad Systems Itroductio to Sigals ad Systems, Part V: Lecture Summary Itroductio to Sigals ad Systems, Part V: Lecture Summary So far we have oly looked at examples of o-recursive
EEL33: Discrete-Time Sigals ad Systems Itroductio to Sigals ad Systems, Part V: Lecture Summary Itroductio to Sigals ad Systems, Part V: Lecture Summary So far we have oly looked at examples of o-recursive
Principle Of Superposition
 ecture 5: PREIMINRY CONCEP O RUCUR NYI Priciple Of uperpositio Mathematically, the priciple of superpositio is stated as ( a ) G( a ) G( ) G a a or for a liear structural system, the respose at a give
ecture 5: PREIMINRY CONCEP O RUCUR NYI Priciple Of uperpositio Mathematically, the priciple of superpositio is stated as ( a ) G( a ) G( ) G a a or for a liear structural system, the respose at a give
Chapter 7: The z-transform. Chih-Wei Liu
 Chapter 7: The -Trasform Chih-Wei Liu Outlie Itroductio The -Trasform Properties of the Regio of Covergece Properties of the -Trasform Iversio of the -Trasform The Trasfer Fuctio Causality ad Stability
Chapter 7: The -Trasform Chih-Wei Liu Outlie Itroductio The -Trasform Properties of the Regio of Covergece Properties of the -Trasform Iversio of the -Trasform The Trasfer Fuctio Causality ad Stability
6.003 Homework #3 Solutions
 6.00 Homework # Solutios Problems. Complex umbers a. Evaluate the real ad imagiary parts of j j. π/ Real part = Imagiary part = 0 e Euler s formula says that j = e jπ/, so jπ/ j π/ j j = e = e. Thus the
6.00 Homework # Solutios Problems. Complex umbers a. Evaluate the real ad imagiary parts of j j. π/ Real part = Imagiary part = 0 e Euler s formula says that j = e jπ/, so jπ/ j π/ j j = e = e. Thus the
School of Mechanical Engineering Purdue University. ME375 Frequency Response - 1
 Case Study ME375 Frequecy Respose - Case Study SUPPORT POWER WIRE DROPPERS Electric trai derives power through a patograph, which cotacts the power wire, which is suspeded from a cateary. Durig high-speed
Case Study ME375 Frequecy Respose - Case Study SUPPORT POWER WIRE DROPPERS Electric trai derives power through a patograph, which cotacts the power wire, which is suspeded from a cateary. Durig high-speed
Frequency Response Methods
 Frequecy Respose Methods The frequecy respose Nyquist diagram polar plots Bode diagram magitude ad phase Frequecy domai specificatios Frequecy Respose Methods I precedig chapters the respose ad performace
Frequecy Respose Methods The frequecy respose Nyquist diagram polar plots Bode diagram magitude ad phase Frequecy domai specificatios Frequecy Respose Methods I precedig chapters the respose ad performace
CDS 101: Lecture 8.2 Tools for PID & Loop Shaping
 CDS : Lecture 8. Tools for PID & Loop Shapig Richard M. Murray 7 November 4 Goals: Show how to use loop shapig to achieve a performace specificatio Itroduce ew tools for loop shapig desig: Ziegler-Nichols,
CDS : Lecture 8. Tools for PID & Loop Shapig Richard M. Murray 7 November 4 Goals: Show how to use loop shapig to achieve a performace specificatio Itroduce ew tools for loop shapig desig: Ziegler-Nichols,
Complex Analysis Spring 2001 Homework I Solution
 Complex Aalysis Sprig 2001 Homework I Solutio 1. Coway, Chapter 1, sectio 3, problem 3. Describe the set of poits satisfyig the equatio z a z + a = 2c, where c > 0 ad a R. To begi, we see from the triagle
Complex Aalysis Sprig 2001 Homework I Solutio 1. Coway, Chapter 1, sectio 3, problem 3. Describe the set of poits satisfyig the equatio z a z + a = 2c, where c > 0 ad a R. To begi, we see from the triagle
Exponential Moving Average Pieter P
 Expoetial Movig Average Pieter P Differece equatio The Differece equatio of a expoetial movig average lter is very simple: y[] x[] + (1 )y[ 1] I this equatio, y[] is the curret output, y[ 1] is the previous
Expoetial Movig Average Pieter P Differece equatio The Differece equatio of a expoetial movig average lter is very simple: y[] x[] + (1 )y[ 1] I this equatio, y[] is the curret output, y[ 1] is the previous
EXPERIMENT OF SIMPLE VIBRATION
 EXPERIMENT OF SIMPLE VIBRATION. PURPOSE The purpose of the experimet is to show free vibratio ad damped vibratio o a system havig oe degree of freedom ad to ivestigate the relatioship betwee the basic
EXPERIMENT OF SIMPLE VIBRATION. PURPOSE The purpose of the experimet is to show free vibratio ad damped vibratio o a system havig oe degree of freedom ad to ivestigate the relatioship betwee the basic
ME 375 FINAL EXAM Friday, May 6, 2005
 ME 375 FINAL EXAM Friay, May 6, 005 Divisio: Kig 11:30 / Cuigham :30 (circle oe) Name: Istructios (1) This is a close book examiatio, but you are allowe three 8.5 11 crib sheets. () You have two hours
ME 375 FINAL EXAM Friay, May 6, 005 Divisio: Kig 11:30 / Cuigham :30 (circle oe) Name: Istructios (1) This is a close book examiatio, but you are allowe three 8.5 11 crib sheets. () You have two hours
Discrete-Time Systems, LTI Systems, and Discrete-Time Convolution
 EEL5: Discrete-Time Sigals ad Systems. Itroductio I this set of otes, we begi our mathematical treatmet of discrete-time s. As show i Figure, a discrete-time operates or trasforms some iput sequece x [
EEL5: Discrete-Time Sigals ad Systems. Itroductio I this set of otes, we begi our mathematical treatmet of discrete-time s. As show i Figure, a discrete-time operates or trasforms some iput sequece x [
732 Appendix E: Previous EEE480 Exams. Rules: One sheet permitted, calculators permitted. GWC 352,
 732 Aedix E: Previous EEE0 Exams EEE0 Exam 2, Srig 2008 A.A. Rodriguez Rules: Oe 8. sheet ermitted, calculators ermitted. GWC 32, 9-372 Problem Aalysis of a Feedback System Cosider the feedback system
732 Aedix E: Previous EEE0 Exams EEE0 Exam 2, Srig 2008 A.A. Rodriguez Rules: Oe 8. sheet ermitted, calculators ermitted. GWC 32, 9-372 Problem Aalysis of a Feedback System Cosider the feedback system
Problem Cosider the curve give parametrically as x = si t ad y = + cos t for» t» ß: (a) Describe the path this traverses: Where does it start (whe t =
 Describe the path this traverses: Where does it start (whe t =") Mathematics Summer Wilso Fial Exam August 8, ANSWERS Problem 1 (a) Fid the solutio to y +x y = e x x that satisfies y() = 5 : This is already i the form we used for a first order liear differetial equatio,
Mathematics Summer Wilso Fial Exam August 8, ANSWERS Problem 1 (a) Fid the solutio to y +x y = e x x that satisfies y() = 5 : This is already i the form we used for a first order liear differetial equatio,
FREE VIBRATION RESPONSE OF A SYSTEM WITH COULOMB DAMPING
 Mechaical Vibratios FREE VIBRATION RESPONSE OF A SYSTEM WITH COULOMB DAMPING A commo dampig mechaism occurrig i machies is caused by slidig frictio or dry frictio ad is called Coulomb dampig. Coulomb dampig
Mechaical Vibratios FREE VIBRATION RESPONSE OF A SYSTEM WITH COULOMB DAMPING A commo dampig mechaism occurrig i machies is caused by slidig frictio or dry frictio ad is called Coulomb dampig. Coulomb dampig
CALCULUS AB SECTION I, Part A Time 60 minutes Number of questions 30 A CALCULATOR MAY NOT BE USED ON THIS PART OF THE EXAM.
 AP Calculus AB Portfolio Project Multiple Choice Practice Name: CALCULUS AB SECTION I, Part A Time 60 miutes Number of questios 30 A CALCULATOR MAY NOT BE USED ON THIS PART OF THE EXAM. Directios: Solve
AP Calculus AB Portfolio Project Multiple Choice Practice Name: CALCULUS AB SECTION I, Part A Time 60 miutes Number of questios 30 A CALCULATOR MAY NOT BE USED ON THIS PART OF THE EXAM. Directios: Solve
Solutions. Number of Problems: 4. None. Use only the prepared sheets for your solutions. Additional paper is available from the supervisors.
 Quiz November 4th, 23 Sigals & Systems (5-575-) P. Reist & Prof. R. D Adrea Solutios Exam Duratio: 4 miutes Number of Problems: 4 Permitted aids: Noe. Use oly the prepared sheets for your solutios. Additioal
Quiz November 4th, 23 Sigals & Systems (5-575-) P. Reist & Prof. R. D Adrea Solutios Exam Duratio: 4 miutes Number of Problems: 4 Permitted aids: Noe. Use oly the prepared sheets for your solutios. Additioal
mx bx kx F t. dt IR I LI V t, Q LQ RQ V t,
 Lecture 5 omplex Variables II (Applicatios i Physics) (See hapter i Boas) To see why complex variables are so useful cosider first the (liear) mechaics of a sigle particle described by Newto s equatio
Lecture 5 omplex Variables II (Applicatios i Physics) (See hapter i Boas) To see why complex variables are so useful cosider first the (liear) mechaics of a sigle particle described by Newto s equatio
Analysis of the No-Load Characteristic of the Moving Coil Linear Compressor
 Purdue Uiversity Purdue e-pubs Iteratioal Compressor Egieerig Coferece School of Mechaical Egieerig 008 Aalysis of the No-Load Characteristic of the Movig Coil Liear Compressor Yigbai Xie North Chia Electric
Purdue Uiversity Purdue e-pubs Iteratioal Compressor Egieerig Coferece School of Mechaical Egieerig 008 Aalysis of the No-Load Characteristic of the Movig Coil Liear Compressor Yigbai Xie North Chia Electric
MTH Assignment 1 : Real Numbers, Sequences
 MTH -26 Assigmet : Real Numbers, Sequeces. Fid the supremum of the set { m m+ : N, m Z}. 2. Let A be a o-empty subset of R ad α R. Show that α = supa if ad oly if α is ot a upper boud of A but α + is a
MTH -26 Assigmet : Real Numbers, Sequeces. Fid the supremum of the set { m m+ : N, m Z}. 2. Let A be a o-empty subset of R ad α R. Show that α = supa if ad oly if α is ot a upper boud of A but α + is a
(s)h(s) = K( s + 8 ) = 5 and one finite zero is located at z 1
h(s) = K( s + 8 ) = 5 and one finite zero is located at z 1") ROOT LOCUS TECHNIQUE 93 should be desiged differetly to eet differet specificatios depedig o its area of applicatio. We have observed i Sectio 6.4 of Chapter 6, how the variatio of a sigle paraeter like
ROOT LOCUS TECHNIQUE 93 should be desiged differetly to eet differet specificatios depedig o its area of applicatio. We have observed i Sectio 6.4 of Chapter 6, how the variatio of a sigle paraeter like
Appendix: The Laplace Transform
 Appedix: The Laplace Trasform The Laplace trasform is a powerful method that ca be used to solve differetial equatio, ad other mathematical problems. Its stregth lies i the fact that it allows the trasformatio
Appedix: The Laplace Trasform The Laplace trasform is a powerful method that ca be used to solve differetial equatio, ad other mathematical problems. Its stregth lies i the fact that it allows the trasformatio
Time-Domain Representations of LTI Systems
 2.1 Itroductio Objectives: 1. Impulse resposes of LTI systems 2. Liear costat-coefficiets differetial or differece equatios of LTI systems 3. Bloc diagram represetatios of LTI systems 4. State-variable
2.1 Itroductio Objectives: 1. Impulse resposes of LTI systems 2. Liear costat-coefficiets differetial or differece equatios of LTI systems 3. Bloc diagram represetatios of LTI systems 4. State-variable
Infinite Sequences and Series
 Chapter 6 Ifiite Sequeces ad Series 6.1 Ifiite Sequeces 6.1.1 Elemetary Cocepts Simply speakig, a sequece is a ordered list of umbers writte: {a 1, a 2, a 3,...a, a +1,...} where the elemets a i represet
Chapter 6 Ifiite Sequeces ad Series 6.1 Ifiite Sequeces 6.1.1 Elemetary Cocepts Simply speakig, a sequece is a ordered list of umbers writte: {a 1, a 2, a 3,...a, a +1,...} where the elemets a i represet
CALCULUS BASIC SUMMER REVIEW
 CALCULUS BASIC SUMMER REVIEW NAME rise y y y Slope of a o vertical lie: m ru Poit Slope Equatio: y y m( ) The slope is m ad a poit o your lie is, ). ( y Slope-Itercept Equatio: y m b slope= m y-itercept=
CALCULUS BASIC SUMMER REVIEW NAME rise y y y Slope of a o vertical lie: m ru Poit Slope Equatio: y y m( ) The slope is m ad a poit o your lie is, ). ( y Slope-Itercept Equatio: y m b slope= m y-itercept=
Dr. Seeler Department of Mechanical Engineering Fall 2009 Lafayette College ME 479: Control Systems and Mechatronics Design and Analysis
 Dr. Seeler Departmet of Mechaical Egieerig Fall 009 Lafayette College ME 479: Cotrol Systems ad Mechatroics Desig ad Aalysis Lab 0: Review of the First ad Secod Order Step Resposes The followig remarks
Dr. Seeler Departmet of Mechaical Egieerig Fall 009 Lafayette College ME 479: Cotrol Systems ad Mechatroics Desig ad Aalysis Lab 0: Review of the First ad Secod Order Step Resposes The followig remarks
Transfer Function Analysis
 Trasfer Fuctio Aalysis Free & Forced Resposes Trasfer Fuctio Syste Stability ME375 Trasfer Fuctios - Free & Forced Resposes Ex: Let s s look at a stable first order syste: τ y + y = Ku Take LT of the I/O
Trasfer Fuctio Aalysis Free & Forced Resposes Trasfer Fuctio Syste Stability ME375 Trasfer Fuctios - Free & Forced Resposes Ex: Let s s look at a stable first order syste: τ y + y = Ku Take LT of the I/O
Assignment 1 : Real Numbers, Sequences. for n 1. Show that (x n ) converges. Further, by observing that x n+2 + x n+1
 converges. Further, by observing that x n+2 + x n+1") Assigmet : Real Numbers, Sequeces. Let A be a o-empty subset of R ad α R. Show that α = supa if ad oly if α is ot a upper boud of A but α + is a upper boud of A for every N. 2. Let y (, ) ad x (, ). Evaluate
Assigmet : Real Numbers, Sequeces. Let A be a o-empty subset of R ad α R. Show that α = supa if ad oly if α is ot a upper boud of A but α + is a upper boud of A for every N. 2. Let y (, ) ad x (, ). Evaluate
Z - Transform. It offers the techniques for digital filter design and frequency analysis of digital signals.
 Z - Trasform The -trasform is a very importat tool i describig ad aalyig digital systems. It offers the techiques for digital filter desig ad frequecy aalysis of digital sigals. Defiitio of -trasform:
Z - Trasform The -trasform is a very importat tool i describig ad aalyig digital systems. It offers the techiques for digital filter desig ad frequecy aalysis of digital sigals. Defiitio of -trasform:
Chapter 7 z-transform
 Chapter 7 -Trasform Itroductio Trasform Uilateral Trasform Properties Uilateral Trasform Iversio of Uilateral Trasform Determiig the Frequecy Respose from Poles ad Zeros Itroductio Role i Discrete-Time
Chapter 7 -Trasform Itroductio Trasform Uilateral Trasform Properties Uilateral Trasform Iversio of Uilateral Trasform Determiig the Frequecy Respose from Poles ad Zeros Itroductio Role i Discrete-Time
Generalizing the DTFT. The z Transform. Complex Exponential Excitation. The Transfer Function. Systems Described by Difference Equations
 Geeraliig the DTFT The Trasform M. J. Roberts - All Rights Reserved. Edited by Dr. Robert Akl 1 The forward DTFT is defied by X e jω = x e jω i which = Ω is discrete-time radia frequecy, a real variable.
Geeraliig the DTFT The Trasform M. J. Roberts - All Rights Reserved. Edited by Dr. Robert Akl 1 The forward DTFT is defied by X e jω = x e jω i which = Ω is discrete-time radia frequecy, a real variable.
Class 07 Time domain analysis Part II 2 nd order systems
 Class 07 Time domai aalysis Part II d order systems Time domai aalysis d order systems iput S output Secod order systems of the type α G(s) as + bs + c Time domai aalysis d order systems iput S α as +
Class 07 Time domai aalysis Part II d order systems Time domai aalysis d order systems iput S output Secod order systems of the type α G(s) as + bs + c Time domai aalysis d order systems iput S α as +
FIR Filter Design: Part II
 EEL335: Discrete-Time Sigals ad Systems. Itroductio I this set of otes, we cosider how we might go about desigig FIR filters with arbitrary frequecy resposes, through compositio of multiple sigle-peak
EEL335: Discrete-Time Sigals ad Systems. Itroductio I this set of otes, we cosider how we might go about desigig FIR filters with arbitrary frequecy resposes, through compositio of multiple sigle-peak
Solution of EECS 315 Final Examination F09
 Solutio of EECS 315 Fial Examiatio F9 1. Fid the umerical value of δ ( t + 4ramp( tdt. δ ( t + 4ramp( tdt. Fid the umerical sigal eergy of x E x = x[ ] = δ 3 = 11 = ( = ramp( ( 4 = ramp( 8 = 8 [ ] = (
Solutio of EECS 315 Fial Examiatio F9 1. Fid the umerical value of δ ( t + 4ramp( tdt. δ ( t + 4ramp( tdt. Fid the umerical sigal eergy of x E x = x[ ] = δ 3 = 11 = ( = ramp( ( 4 = ramp( 8 = 8 [ ] = (
Lab(8) controller design using root locus
 controller design using root locus") Lab(8) cotroller desig usig root locus I this lab we will lear how to desig a cotroller usig root locus but before this we eed to aswer the followig questios: What is root locus? What is the purpose of
Lab(8) cotroller desig usig root locus I this lab we will lear how to desig a cotroller usig root locus but before this we eed to aswer the followig questios: What is root locus? What is the purpose of
Voltage controlled oscillator (VCO)
") Voltage cotrolled oscillator (VO) Oscillatio frequecy jl Z L(V) jl[ L(V)] [L L (V)] L L (V) T VO gai / Logf Log 4 L (V) f f 4 L(V) Logf / L(V) f 4 L (V) f (V) 3 Lf 3 VO gai / (V) j V / V Bi (V) / V Bi
Voltage cotrolled oscillator (VO) Oscillatio frequecy jl Z L(V) jl[ L(V)] [L L (V)] L L (V) T VO gai / Logf Log 4 L (V) f f 4 L(V) Logf / L(V) f 4 L (V) f (V) 3 Lf 3 VO gai / (V) j V / V Bi (V) / V Bi
MASSACHUSETTS INSTITUTE OF TECHNOLOGY Department of Electrical Engineering and Computer Science. BACKGROUND EXAM September 30, 2004.
 MASSACHUSETTS INSTITUTE OF TECHNOLOGY Departmet of Electrical Egieerig ad Computer Sciece 6.34 Discrete Time Sigal Processig Fall 24 BACKGROUND EXAM September 3, 24. Full Name: Note: This exam is closed
MASSACHUSETTS INSTITUTE OF TECHNOLOGY Departmet of Electrical Egieerig ad Computer Sciece 6.34 Discrete Time Sigal Processig Fall 24 BACKGROUND EXAM September 3, 24. Full Name: Note: This exam is closed
ECE 422/522 Power System Operations & Planning/Power Systems Analysis II : 6 - Small Signal Stability
 ECE 4/5 Power System Operatios & Plaig/Power Systems Aalysis II : 6 - Small Sigal Stability Sprig 014 Istructor: Kai Su 1 Refereces Kudur s Chapter 1 Saadat s Chapter 11.4 EPRI Tutorial s Chapter 8 Power
ECE 4/5 Power System Operatios & Plaig/Power Systems Aalysis II : 6 - Small Sigal Stability Sprig 014 Istructor: Kai Su 1 Refereces Kudur s Chapter 1 Saadat s Chapter 11.4 EPRI Tutorial s Chapter 8 Power
School of Mechanical Engineering Purdue University. ME375 Transfer Functions - 1
 Trasfer Fuctio Aalysis Free & Forced Resposes Trasfer Fuctio Syste Stability ME375 Trasfer Fuctios - 1 Free & Forced Resposes Ex: Let s look at a stable first order syste: y y Ku Take LT of the I/O odel
Trasfer Fuctio Aalysis Free & Forced Resposes Trasfer Fuctio Syste Stability ME375 Trasfer Fuctios - 1 Free & Forced Resposes Ex: Let s look at a stable first order syste: y y Ku Take LT of the I/O odel
ENGI Series Page 6-01
 ENGI 3425 6 Series Page 6-01 6. Series Cotets: 6.01 Sequeces; geeral term, limits, covergece 6.02 Series; summatio otatio, covergece, divergece test 6.03 Stadard Series; telescopig series, geometric series,
ENGI 3425 6 Series Page 6-01 6. Series Cotets: 6.01 Sequeces; geeral term, limits, covergece 6.02 Series; summatio otatio, covergece, divergece test 6.03 Stadard Series; telescopig series, geometric series,
Apply change-of-basis formula to rewrite x as a linear combination of eigenvectors v j.
 Eigevalue-Eigevector Istructor: Nam Su Wag eigemcd Ay vector i real Euclidea space of dimesio ca be uiquely epressed as a liear combiatio of liearly idepedet vectors (ie, basis) g j, j,,, α g α g α g α
Eigevalue-Eigevector Istructor: Nam Su Wag eigemcd Ay vector i real Euclidea space of dimesio ca be uiquely epressed as a liear combiatio of liearly idepedet vectors (ie, basis) g j, j,,, α g α g α g α
EE / EEE SAMPLE STUDY MATERIAL. GATE, IES & PSUs Signal System. Electrical Engineering. Postal Correspondence Course
 Sigal-EE Postal Correspodece Course 1 SAMPLE STUDY MATERIAL Electrical Egieerig EE / EEE Postal Correspodece Course GATE, IES & PSUs Sigal System Sigal-EE Postal Correspodece Course CONTENTS 1. SIGNAL
Sigal-EE Postal Correspodece Course 1 SAMPLE STUDY MATERIAL Electrical Egieerig EE / EEE Postal Correspodece Course GATE, IES & PSUs Sigal System Sigal-EE Postal Correspodece Course CONTENTS 1. SIGNAL
Dynamic Response of Second Order Mechanical Systems with Viscous Dissipation forces
 Hadout #b (pp. 4-55) Dyamic Respose o Secod Order Mechaical Systems with Viscous Dissipatio orces M X + DX + K X = F t () Periodic Forced Respose to F (t) = F o si( t) ad F (t) = M u si(t) Frequecy Respose
Hadout #b (pp. 4-55) Dyamic Respose o Secod Order Mechaical Systems with Viscous Dissipatio orces M X + DX + K X = F t () Periodic Forced Respose to F (t) = F o si( t) ad F (t) = M u si(t) Frequecy Respose
Castiel, Supernatural, Season 6, Episode 18
 13 Differetial Equatios the aswer to your questio ca best be epressed as a series of partial differetial equatios... Castiel, Superatural, Seaso 6, Episode 18 A differetial equatio is a mathematical equatio
13 Differetial Equatios the aswer to your questio ca best be epressed as a series of partial differetial equatios... Castiel, Superatural, Seaso 6, Episode 18 A differetial equatio is a mathematical equatio
COMM 602: Digital Signal Processing
 COMM 60: Digital Sigal Processig Lecture 4 -Properties of LTIS Usig Z-Trasform -Iverse Z-Trasform Properties of LTIS Usig Z-Trasform Properties of LTIS Usig Z-Trasform -ve +ve Properties of LTIS Usig Z-Trasform
COMM 60: Digital Sigal Processig Lecture 4 -Properties of LTIS Usig Z-Trasform -Iverse Z-Trasform Properties of LTIS Usig Z-Trasform Properties of LTIS Usig Z-Trasform -ve +ve Properties of LTIS Usig Z-Trasform
ECE-S352 Introduction to Digital Signal Processing Lecture 3A Direct Solution of Difference Equations
 ECE-S352 Itroductio to Digital Sigal Processig Lecture 3A Direct Solutio of Differece Equatios Discrete Time Systems Described by Differece Equatios Uit impulse (sample) respose h() of a DT system allows
ECE-S352 Itroductio to Digital Sigal Processig Lecture 3A Direct Solutio of Differece Equatios Discrete Time Systems Described by Differece Equatios Uit impulse (sample) respose h() of a DT system allows
UNIVERSITY OF BOLTON SCHOOL OF ENGINEERING BENG (HONS) IN MECHANICAL ENGINEERING SEMESTER 1 EXAMINATION 2016/2017
 IN MECHANICAL ENGINEERING SEMESTER 1 EXAMINATION 2016/2017") UNIVERSITY OF BOLTON TW30 SCHOOL OF ENGINEERING BENG (HONS) IN MECHANICAL ENGINEERING SEMESTER EXAMINATION 06/07 ADVANCED THERMOFLUIDS & CONTROL SYSTEMS MODULE NO: AME6005 Date: Thursday Jauary 07 Time:
UNIVERSITY OF BOLTON TW30 SCHOOL OF ENGINEERING BENG (HONS) IN MECHANICAL ENGINEERING SEMESTER EXAMINATION 06/07 ADVANCED THERMOFLUIDS & CONTROL SYSTEMS MODULE NO: AME6005 Date: Thursday Jauary 07 Time:
3.2 Properties of Division 3.3 Zeros of Polynomials 3.4 Complex and Rational Zeros of Polynomials
 Math 60 www.timetodare.com 3. Properties of Divisio 3.3 Zeros of Polyomials 3.4 Complex ad Ratioal Zeros of Polyomials I these sectios we will study polyomials algebraically. Most of our work will be cocered
Math 60 www.timetodare.com 3. Properties of Divisio 3.3 Zeros of Polyomials 3.4 Complex ad Ratioal Zeros of Polyomials I these sectios we will study polyomials algebraically. Most of our work will be cocered
Question1 Multiple choices (circle the most appropriate one):
:") Philadelphia Uiversity Studet Name: Faculty of Egieerig Studet Number: Dept. of Computer Egieerig Fial Exam, First Semester: 2014/2015 Course Title: Digital Sigal Aalysis ad Processig Date: 01/02/2015
Philadelphia Uiversity Studet Name: Faculty of Egieerig Studet Number: Dept. of Computer Egieerig Fial Exam, First Semester: 2014/2015 Course Title: Digital Sigal Aalysis ad Processig Date: 01/02/2015
Signals & Systems Chapter3
 Sigals & Systems Chapter3 1.2 Discrete-Time (D-T) Sigals Electroic systems do most of the processig of a sigal usig a computer. A computer ca t directly process a C-T sigal but istead eeds a stream of
Sigals & Systems Chapter3 1.2 Discrete-Time (D-T) Sigals Electroic systems do most of the processig of a sigal usig a computer. A computer ca t directly process a C-T sigal but istead eeds a stream of
Zeros of Polynomials
 Math 160 www.timetodare.com 4.5 4.6 Zeros of Polyomials I these sectios we will study polyomials algebraically. Most of our work will be cocered with fidig the solutios of polyomial equatios of ay degree
Math 160 www.timetodare.com 4.5 4.6 Zeros of Polyomials I these sectios we will study polyomials algebraically. Most of our work will be cocered with fidig the solutios of polyomial equatios of ay degree
Sinusoidal Steady-state Analysis
 Siusoidal Steady-state Aalysis Complex umber reviews Phasors ad ordiary differetial equatios Complete respose ad siusoidal steady-state respose Cocepts of impedace ad admittace Siusoidal steady-state aalysis
Siusoidal Steady-state Aalysis Complex umber reviews Phasors ad ordiary differetial equatios Complete respose ad siusoidal steady-state respose Cocepts of impedace ad admittace Siusoidal steady-state aalysis
ADVANCED DIGITAL SIGNAL PROCESSING
 ADVANCED DIGITAL SIGNAL PROCESSING PROF. S. C. CHAN (email : sccha@eee.hku.hk, Rm. CYC-702) DISCRETE-TIME SIGNALS AND SYSTEMS MULTI-DIMENSIONAL SIGNALS AND SYSTEMS RANDOM PROCESSES AND APPLICATIONS ADAPTIVE
ADVANCED DIGITAL SIGNAL PROCESSING PROF. S. C. CHAN (email : sccha@eee.hku.hk, Rm. CYC-702) DISCRETE-TIME SIGNALS AND SYSTEMS MULTI-DIMENSIONAL SIGNALS AND SYSTEMS RANDOM PROCESSES AND APPLICATIONS ADAPTIVE
1 1 2 = show that: over variables x and y. [2 marks] Write down necessary conditions involving first and second-order partial derivatives for ( x0, y
![1 1 2 = show that: over variables x and y. [2 marks] Write down necessary conditions involving first and second-order partial derivatives for ( x0, y](/thumbs/95/125864248.jpg "1 1 2 = show that: over variables x and y. [2 marks] Write down necessary conditions involving first and second-order partial derivatives for ( x0, y") Questio (a) A square matrix A= A is called positive defiite if the quadratic form waw > 0 for every o-zero vector w [Note: Here (.) deotes the traspose of a matrix or a vector]. Let 0 A = 0 = show that:
Questio (a) A square matrix A= A is called positive defiite if the quadratic form waw > 0 for every o-zero vector w [Note: Here (.) deotes the traspose of a matrix or a vector]. Let 0 A = 0 = show that:
FIR Filter Design: Part I
 EEL3: Discrete-Time Sigals ad Systems FIR Filter Desig: Part I. Itroductio FIR Filter Desig: Part I I this set o otes, we cotiue our exploratio o the requecy respose o FIR ilters. First, we cosider some
EEL3: Discrete-Time Sigals ad Systems FIR Filter Desig: Part I. Itroductio FIR Filter Desig: Part I I this set o otes, we cotiue our exploratio o the requecy respose o FIR ilters. First, we cosider some
TEACHER CERTIFICATION STUDY GUIDE
 COMPETENCY 1. ALGEBRA SKILL 1.1 1.1a. ALGEBRAIC STRUCTURES Kow why the real ad complex umbers are each a field, ad that particular rigs are ot fields (e.g., itegers, polyomial rigs, matrix rigs) Algebra
COMPETENCY 1. ALGEBRA SKILL 1.1 1.1a. ALGEBRAIC STRUCTURES Kow why the real ad complex umbers are each a field, ad that particular rigs are ot fields (e.g., itegers, polyomial rigs, matrix rigs) Algebra
Section 1.1. Calculus: Areas And Tangents. Difference Equations to Differential Equations
 Differece Equatios to Differetial Equatios Sectio. Calculus: Areas Ad Tagets The study of calculus begis with questios about chage. What happes to the velocity of a swigig pedulum as its positio chages?
Differece Equatios to Differetial Equatios Sectio. Calculus: Areas Ad Tagets The study of calculus begis with questios about chage. What happes to the velocity of a swigig pedulum as its positio chages?
Lecture 13. Graphical representation of the frequency response. Luca Ferrarini - Basic Automatic Control 1
 Lecture 3 Graphical represetatio of the frequecy respose Luca Ferrarii - Basic Automatic Cotrol Graphical represetatio of the frequecy respose Polar plot G Bode plot ( j), G Im 3 Re of the magitude G (
Lecture 3 Graphical represetatio of the frequecy respose Luca Ferrarii - Basic Automatic Cotrol Graphical represetatio of the frequecy respose Polar plot G Bode plot ( j), G Im 3 Re of the magitude G (
Bode Diagrams School of Mechanical Engineering ME375 Frequency Response - 29 Purdue University Example Ex:
 ME375 Hadouts Bode Diagrams Recall that if m m bs m + bm s + + bs+ b Gs () as + a s + + as+ a The bm( j z)( j z) ( j zm) G( j ) a ( j p )( j p ) ( j p ) bm( s z)( s z) ( s zm) a ( s p )( s p ) ( s p )
ME375 Hadouts Bode Diagrams Recall that if m m bs m + bm s + + bs+ b Gs () as + a s + + as+ a The bm( j z)( j z) ( j zm) G( j ) a ( j p )( j p ) ( j p ) bm( s z)( s z) ( s zm) a ( s p )( s p ) ( s p )
PAPER : IIT-JAM 2010
 MATHEMATICS-MA (CODE A) Q.-Q.5: Oly oe optio is correct for each questio. Each questio carries (+6) marks for correct aswer ad ( ) marks for icorrect aswer.. Which of the followig coditios does NOT esure
MATHEMATICS-MA (CODE A) Q.-Q.5: Oly oe optio is correct for each questio. Each questio carries (+6) marks for correct aswer ad ( ) marks for icorrect aswer.. Which of the followig coditios does NOT esure
Exam. Notes: A single A4 sheet of paper (double sided; hand-written or computer typed)
") Exam February 8th, 8 Sigals & Systems (5-575-) Prof. R. D Adrea Exam Exam Duratio: 5 Mi Number of Problems: 5 Number of Poits: 5 Permitted aids: Importat: Notes: A sigle A sheet of paper (double sided;
Exam February 8th, 8 Sigals & Systems (5-575-) Prof. R. D Adrea Exam Exam Duratio: 5 Mi Number of Problems: 5 Number of Poits: 5 Permitted aids: Importat: Notes: A sigle A sheet of paper (double sided;
(a) (b) All real numbers. (c) All real numbers. (d) None. to show the. (a) 3. (b) [ 7, 1) (c) ( 7, 1) (d) At x = 7. (a) (b)
 (b) All real numbers. (c) All real numbers. (d) None. to show the. (a) 3. (b) [ 7, 1) (c) ( 7, 1) (d) At x = 7. (a) (b)") Chapter 0 Review 597. E; a ( + )( + ) + + S S + S + + + + + + S lim + l. D; a diverges by the Itegral l k Test sice d lim [(l ) ], so k l ( ) does ot coverge absolutely. But it coverges by the Alteratig
Chapter 0 Review 597. E; a ( + )( + ) + + S S + S + + + + + + S lim + l. D; a diverges by the Itegral l k Test sice d lim [(l ) ], so k l ( ) does ot coverge absolutely. But it coverges by the Alteratig
We will conclude the chapter with the study a few methods and techniques which are useful
 Chapter : Coordiate geometry: I this chapter we will lear about the mai priciples of graphig i a dimesioal (D) Cartesia system of coordiates. We will focus o drawig lies ad the characteristics of the graphs
Chapter : Coordiate geometry: I this chapter we will lear about the mai priciples of graphig i a dimesioal (D) Cartesia system of coordiates. We will focus o drawig lies ad the characteristics of the graphs
62. Power series Definition 16. (Power series) Given a sequence {c n }, the series. c n x n = c 0 + c 1 x + c 2 x 2 + c 3 x 3 +
 Given a sequence {c n }, the series. c n x n = c 0 + c 1 x + c 2 x 2 + c 3 x 3 +") 62. Power series Defiitio 16. (Power series) Give a sequece {c }, the series c x = c 0 + c 1 x + c 2 x 2 + c 3 x 3 + is called a power series i the variable x. The umbers c are called the coefficiets of
62. Power series Defiitio 16. (Power series) Give a sequece {c }, the series c x = c 0 + c 1 x + c 2 x 2 + c 3 x 3 + is called a power series i the variable x. The umbers c are called the coefficiets of
1the 1it is said to be overdamped. When 1, the roots of
 Homework 3 AERE573 Fall 08 Due 0/8(M) ame PROBLEM (40pts) Cosider a D order uderdamped system trasfer fuctio H( s) s ratio 0 The deomiator is the system characteristic polyomial P( s) s s (a)(5pts) Use
Homework 3 AERE573 Fall 08 Due 0/8(M) ame PROBLEM (40pts) Cosider a D order uderdamped system trasfer fuctio H( s) s ratio 0 The deomiator is the system characteristic polyomial P( s) s s (a)(5pts) Use
 FINALTERM EXAMINATION Fall 9 Calculus & Aalytical Geometry-I Questio No: ( Mars: ) - Please choose oe Let f ( x) is a fuctio such that as x approaches a real umber a, either from left or right-had-side,
FINALTERM EXAMINATION Fall 9 Calculus & Aalytical Geometry-I Questio No: ( Mars: ) - Please choose oe Let f ( x) is a fuctio such that as x approaches a real umber a, either from left or right-had-side,
CHAPTER 10 INFINITE SEQUENCES AND SERIES
 CHAPTER 10 INFINITE SEQUENCES AND SERIES 10.1 Sequeces 10.2 Ifiite Series 10.3 The Itegral Tests 10.4 Compariso Tests 10.5 The Ratio ad Root Tests 10.6 Alteratig Series: Absolute ad Coditioal Covergece
CHAPTER 10 INFINITE SEQUENCES AND SERIES 10.1 Sequeces 10.2 Ifiite Series 10.3 The Itegral Tests 10.4 Compariso Tests 10.5 The Ratio ad Root Tests 10.6 Alteratig Series: Absolute ad Coditioal Covergece
Matrices and vectors
 Oe Matrices ad vectors This book takes for grated that readers have some previous kowledge of the calculus of real fuctios of oe real variable It would be helpful to also have some kowledge of liear algebra
Oe Matrices ad vectors This book takes for grated that readers have some previous kowledge of the calculus of real fuctios of oe real variable It would be helpful to also have some kowledge of liear algebra
Honors Calculus Homework 13 Solutions, due 12/8/5
 Hoors Calculus Homework Solutios, due /8/5 Questio Let a regio R i the plae be bouded by the curves y = 5 ad = 5y y. Sketch the regio R. The two curves meet where both equatios hold at oce, so where: y
Hoors Calculus Homework Solutios, due /8/5 Questio Let a regio R i the plae be bouded by the curves y = 5 ad = 5y y. Sketch the regio R. The two curves meet where both equatios hold at oce, so where: y
Beurling Integers: Part 2
 Beurlig Itegers: Part 2 Isomorphisms Devi Platt July 11, 2015 1 Prime Factorizatio Sequeces I the last article we itroduced the Beurlig geeralized itegers, which ca be represeted as a sequece of real umbers
Beurlig Itegers: Part 2 Isomorphisms Devi Platt July 11, 2015 1 Prime Factorizatio Sequeces I the last article we itroduced the Beurlig geeralized itegers, which ca be represeted as a sequece of real umbers
Chapter 9 - CD companion 1. A Generic Implementation; The Common-Merge Amplifier. 1 τ is. ω ch. τ io
 Chapter 9 - CD compaio CHAPTER NINE CD-9.2 CD-9.2. Stages With Voltage ad Curret Gai A Geeric Implemetatio; The Commo-Merge Amplifier The advaced method preseted i the text for approximatig cutoff frequecies
Chapter 9 - CD compaio CHAPTER NINE CD-9.2 CD-9.2. Stages With Voltage ad Curret Gai A Geeric Implemetatio; The Commo-Merge Amplifier The advaced method preseted i the text for approximatig cutoff frequecies
Signal Processing. Lecture 02: Discrete Time Signals and Systems. Ahmet Taha Koru, Ph. D. Yildiz Technical University.
 Sigal Processig Lecture 02: Discrete Time Sigals ad Systems Ahmet Taha Koru, Ph. D. Yildiz Techical Uiversity 2017-2018 Fall ATK (YTU) Sigal Processig 2017-2018 Fall 1 / 51 Discrete Time Sigals Discrete
Sigal Processig Lecture 02: Discrete Time Sigals ad Systems Ahmet Taha Koru, Ph. D. Yildiz Techical Uiversity 2017-2018 Fall ATK (YTU) Sigal Processig 2017-2018 Fall 1 / 51 Discrete Time Sigals Discrete
Most text will write ordinary derivatives using either Leibniz notation 2 3. y + 5y= e and y y. xx tt t
 Itroductio to Differetial Equatios Defiitios ad Termiolog Differetial Equatio: A equatio cotaiig the derivatives of oe or more depedet variables, with respect to oe or more idepedet variables, is said
Itroductio to Differetial Equatios Defiitios ad Termiolog Differetial Equatio: A equatio cotaiig the derivatives of oe or more depedet variables, with respect to oe or more idepedet variables, is said
The Z-Transform. (t-t 0 ) Figure 1: Simplified graph of an impulse function. For an impulse, it can be shown that (1)
 Figure 1: Simplified graph of an impulse function. For an impulse, it can be shown that (1)") The Z-Trasform Sampled Data The geeralied fuctio (t) (also kow as the impulse fuctio) is useful i the defiitio ad aalysis of sampled-data sigals. Figure below shows a simplified graph of a impulse. (t-t
The Z-Trasform Sampled Data The geeralied fuctio (t) (also kow as the impulse fuctio) is useful i the defiitio ad aalysis of sampled-data sigals. Figure below shows a simplified graph of a impulse. (t-t
x c the remainder is Pc ().
.") Algebra, Polyomial ad Ratioal Fuctios Page 1 K.Paulk Notes Chapter 3, Sectio 3.1 to 3.4 Summary Sectio Theorem Notes 3.1 Zeros of a Fuctio Set the fuctio to zero ad solve for x. The fuctio is zero at these
Algebra, Polyomial ad Ratioal Fuctios Page 1 K.Paulk Notes Chapter 3, Sectio 3.1 to 3.4 Summary Sectio Theorem Notes 3.1 Zeros of a Fuctio Set the fuctio to zero ad solve for x. The fuctio is zero at these
Filter banks. Separately, the lowpass and highpass filters are not invertible. removes the highest frequency 1/ 2and
 Filter bas Separately, the lowpass ad highpass filters are ot ivertible T removes the highest frequecy / ad removes the lowest frequecy Together these filters separate the sigal ito low-frequecy ad high-frequecy
Filter bas Separately, the lowpass ad highpass filters are ot ivertible T removes the highest frequecy / ad removes the lowest frequecy Together these filters separate the sigal ito low-frequecy ad high-frequecy
(A sequence also can be thought of as the list of function values attained for a function f :ℵ X, where f (n) = x n for n 1.) x 1 x N +k x N +4 x 3
 = x n for n 1.) x 1 x N +k x N +4 x 3") MATH 337 Sequeces Dr. Neal, WKU Let X be a metric space with distace fuctio d. We shall defie the geeral cocept of sequece ad limit i a metric space, the apply the results i particular to some special
MATH 337 Sequeces Dr. Neal, WKU Let X be a metric space with distace fuctio d. We shall defie the geeral cocept of sequece ad limit i a metric space, the apply the results i particular to some special
Chapter 9: Numerical Differentiation
 178 Chapter 9: Numerical Differetiatio Numerical Differetiatio Formulatio of equatios for physical problems ofte ivolve derivatives (rate-of-chage quatities, such as velocity ad acceleratio). Numerical
178 Chapter 9: Numerical Differetiatio Numerical Differetiatio Formulatio of equatios for physical problems ofte ivolve derivatives (rate-of-chage quatities, such as velocity ad acceleratio). Numerical
Balancing. Rotating Components Examples of rotating components in a mechanism or a machine. (a)
") alacig NOT COMPLETE Rotatig Compoets Examples of rotatig compoets i a mechaism or a machie. Figure 1: Examples of rotatig compoets: camshaft; crakshaft Sigle-Plae (Static) alace Cosider a rotatig shaft
alacig NOT COMPLETE Rotatig Compoets Examples of rotatig compoets i a mechaism or a machie. Figure 1: Examples of rotatig compoets: camshaft; crakshaft Sigle-Plae (Static) alace Cosider a rotatig shaft
Polynomial Functions and Their Graphs
 Polyomial Fuctios ad Their Graphs I this sectio we begi the study of fuctios defied by polyomial expressios. Polyomial ad ratioal fuctios are the most commo fuctios used to model data, ad are used extesively
Polyomial Fuctios ad Their Graphs I this sectio we begi the study of fuctios defied by polyomial expressios. Polyomial ad ratioal fuctios are the most commo fuctios used to model data, ad are used extesively
Chapter 10: Power Series
 Chapter : Power Series 57 Chapter Overview: Power Series The reaso series are part of a Calculus course is that there are fuctios which caot be itegrated. All power series, though, ca be itegrated because
Chapter : Power Series 57 Chapter Overview: Power Series The reaso series are part of a Calculus course is that there are fuctios which caot be itegrated. All power series, though, ca be itegrated because
Complex Numbers Solutions
 Complex Numbers Solutios Joseph Zoller February 7, 06 Solutios. (009 AIME I Problem ) There is a complex umber with imagiary part 64 ad a positive iteger such that Fid. [Solutio: 697] 4i + + 4i. 4i 4i
Complex Numbers Solutios Joseph Zoller February 7, 06 Solutios. (009 AIME I Problem ) There is a complex umber with imagiary part 64 ad a positive iteger such that Fid. [Solutio: 697] 4i + + 4i. 4i 4i
Dynamic System Response
 Solutio of Liear, Costat-Coefficiet, Ordiary Differetial Equatios Classical Operator Method Laplace Trasform Method Laplace Trasform Properties 1 st -Order Dyamic System Time ad Frequecy Respose d -Order
Solutio of Liear, Costat-Coefficiet, Ordiary Differetial Equatios Classical Operator Method Laplace Trasform Method Laplace Trasform Properties 1 st -Order Dyamic System Time ad Frequecy Respose d -Order
AP Calculus BC 2005 Scoring Guidelines
 AP Calculus BC 5 Scorig Guidelies The College Board: Coectig Studets to College Success The College Board is a ot-for-profit membership associatio whose missio is to coect studets to college success ad
AP Calculus BC 5 Scorig Guidelies The College Board: Coectig Studets to College Success The College Board is a ot-for-profit membership associatio whose missio is to coect studets to college success ad
Math 113 Exam 3 Practice
 Math Exam Practice Exam 4 will cover.-., 0. ad 0.. Note that eve though. was tested i exam, questios from that sectios may also be o this exam. For practice problems o., refer to the last review. This
Math Exam Practice Exam 4 will cover.-., 0. ad 0.. Note that eve though. was tested i exam, questios from that sectios may also be o this exam. For practice problems o., refer to the last review. This
September 2012 C1 Note. C1 Notes (Edexcel) Copyright - For AS, A2 notes and IGCSE / GCSE worksheets 1
 Copyright - For AS, A2 notes and IGCSE / GCSE worksheets 1") September 0 s (Edecel) Copyright www.pgmaths.co.uk - For AS, A otes ad IGCSE / GCSE worksheets September 0 Copyright www.pgmaths.co.uk - For AS, A otes ad IGCSE / GCSE worksheets September 0 Copyright
September 0 s (Edecel) Copyright www.pgmaths.co.uk - For AS, A otes ad IGCSE / GCSE worksheets September 0 Copyright www.pgmaths.co.uk - For AS, A otes ad IGCSE / GCSE worksheets September 0 Copyright
2C09 Design for seismic and climate changes
 2C09 Desig for seismic ad climate chages Lecture 02: Dyamic respose of sigle-degree-of-freedom systems I Daiel Grecea, Politehica Uiversity of Timisoara 10/03/2014 Europea Erasmus Mudus Master Course Sustaiable
2C09 Desig for seismic ad climate chages Lecture 02: Dyamic respose of sigle-degree-of-freedom systems I Daiel Grecea, Politehica Uiversity of Timisoara 10/03/2014 Europea Erasmus Mudus Master Course Sustaiable
Problem 1. Problem Engineering Dynamics Problem Set 9--Solution. Find the equation of motion for the system shown with respect to:
 2.003 Egieerig Dyamics Problem Set 9--Solutio Problem 1 Fid the equatio of motio for the system show with respect to: a) Zero sprig force positio. Draw the appropriate free body diagram. b) Static equilibrium
2.003 Egieerig Dyamics Problem Set 9--Solutio Problem 1 Fid the equatio of motio for the system show with respect to: a) Zero sprig force positio. Draw the appropriate free body diagram. b) Static equilibrium