Chapter Objectives. Copyright 2011 Pearson Education South Asia Pte Ltd
|
|
|
- Reynold Carter
- 5 years ago
- Views:
Transcription

1 Chapter Objectives To show how to add forces and resolve them into components using the Parallelogram Law. To express force and position in Cartesian vector form and explain how to determine the vector s magnitude and direction. To introduce the dot product in order to determine the angle between two vectors or the projection of one vector onto another.
2 In-Class Activities 1. Reading Quiz. Applications 3. Scalars and Vectors 4. Vector Operations 5. Vector Addition of Forces 6. Addition of a System of Coplanar Forces 7. Cartesian Vectors 8. Addition and Subtraction of Cartesian Vectors 9. Position Vectors 10. Force Vector Directed along a Line 11. Dot Product 1. Concept Quiz
3 READING QUIZ 1. Which one of the following is a scalar quantity? a) Force b) Position c) Mass d) Velocity
4 READING QUIZ (cont). If a dot product of two non-zero vectors is 0, then the two vectors must be to each other. a) Parallel (pointing in the same direction) b) Parallel (pointing in the opposite direction) c) Perpendicular d) Cannot be determined.
5 APPLICATIONS
6 SCALARS AND VECTORS Scalar A quantity characterized by a positive or negative number Indicated by letters in italic such as A e.g., mass, volume and length
7 SCALARS AND VECTORS (cont) Vector A quantity that has magnitude and direction e.g., position, force and moment Represented by a letter with an arrow over it Magnitude is designated by In this subject, vector is presented as A and its magnitude (positive quantity) as A A A
8 VECTOR OPERATIONS Multiplication and Division of a Vector by a Scalar - Product of vector A and scalar a = aa - Magnitude = aa - Law of multiplication applies e.g. A/a = ( 1/a ) A, a 0
9 VECTOR OPERATIONS (cont) Vector Addition - Addition of two vectors A and B gives a resultant vector R by the parallelogram law - Result R can be found by triangle construction - Communicative e.g. R = A + B = B + A - Special case: Vectors A and B are collinear (both have the same line of action)
10 VECTOR OPERATIONS (cont) Vector Subtraction - Special case of addition e.g. R = A B = A + ( - B ) - Rules of Vector Addition Applies
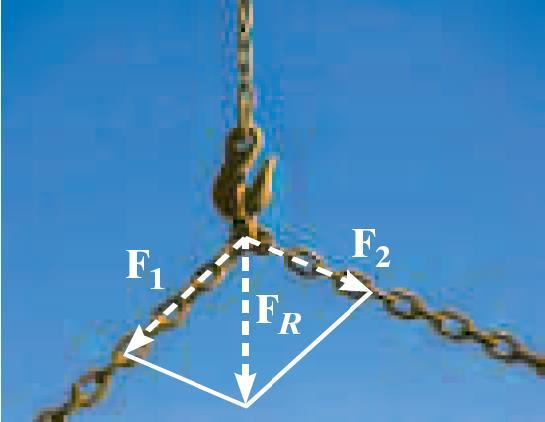
11 VECTOR ADDITION OF FORCES Finding a Resultant Force Parallelogram law is carried out to find the resultant force Resultant, F R = ( F 1 + F )
12 VECTOR ADDITION OF FORCES (cont) Procedure for Analysis Parallelogram Law Make a sketch using the parallelogram law component forces add to form the resultant force Resultant force is shown by the diagonal of the parallelogram The components are shown by the sides of the parallelogram


13 VECTOR ADDITION OF FORCES (cont) Procedure for Analysis Trigonometry Redraw half portion of the parallelogram Magnitude of the resultant force can be determined by the law of cosines Direction of the resultant force can be determined by the law of sines Magnitude of the two components can be determined by the law of sines

14 EXAMPLE 1 The screw eye is subjected to two forces, F 1 and F. Determine the magnitude and direction of the resultant force. Copyright 011 Pearson Education South Asia Pte Ltd

15 EXAMPLE 1 (cont) Parallelogram Law Unknown: magnitude of F R and angle θ Copyright 011 Pearson Education South Asia Pte Ltd
16 EXAMPLE 1 (cont) Solution Trigonometry Law of Cosines 100N 150N 100N 150N cos N N F R Law of Sines 150N 1.6N sin sin N sin N 39.8 Copyright 011 Pearson Education South Asia Pte Ltd
17 EXAMPLE 1 (cont) Solution Trigonometry Direction Φ of F R measured from the horizontal Copyright 011 Pearson Education South Asia Pte Ltd
18 ADDITION OF A SYSTEM OF COPLANAR FORCES Scalar Notation x and y axes are designated positive and negative Components of forces expressed as algebraic scalars F F F x x F F y cos and F F sin y
19 ADDITION OF A SYSTEM OF COPLANAR FORCES (cont) Cartesian Vector Notation Cartesian unit vectors i and j are used to designate the x and y directions Unit vectors i and j have dimensionless magnitude of unity ( = 1 ) Magnitude is always a positive quantity, represented by scalars F x and F y F F i F j x y
20 ADDITION OF A SYSTEM OF COPLANAR FORCES (cont) Coplanar Force Resultants To determine resultant of several coplanar forces: Resolve force into x and y components F F i F j 1 1x 1y F F i F x F F i F j 3 3x 3 y Addition of the respective components using scalar algebra y j
21 ADDITION OF A SYSTEM OF COPLANAR FORCES (cont) Coplanar Force Resultants Vector resultant is therefore F F F F R 1 3 F i F j If scalar notation is used Rx Ry F F Rx Ry F F 1x 1y F F x y F F 3x 3y
22 ADDITION OF A SYSTEM OF COPLANAR FORCES (cont) Coplanar Force Resultants In all cases we have F F Rx Ry F F x y * Take note of sign conventions Magnitude of F R can be found by Pythagorean Theorem F R F Rx F Ry and tan -1 F F Ry Rx

23 EXAMPLE Determine x and y components of F 1 and F acting on the boom. Express each force as a Cartesian vector. Copyright 011 Pearson Education South Asia Pte Ltd

24 EXAMPLE (cont) Solution Scalar Notation F F 1x 1y 00sin 30 00cos 30 N 100N 100N N 173N 173N Copyright 011 Pearson Education South Asia Pte Ltd

25 EXAMPLE (cont) Solution By similar triangles we have F F x y Scalar Notation: 40N 100N F F x y 100N Cartesian Vector Notation: 40N F F 1 100N 100i 173 j 40i 100 jn N Copyright 011 Pearson Education South Asia Pte Ltd

26 EXAMPLE 3 The link is subjected to two forces F1 and F. Determine the magnitude and orientation of the resultant force. Copyright 011 Pearson Education South Asia Pte Ltd
27 EXAMPLE 3 (cont) Scalar Notation: Solution I F F F F Rx Rx F 36.8N Ry Ry F x y : 600cos 30 : 600sin N N 400sin 45 N 400cos 45 N N Copyright 011 Pearson Education South Asia Pte Ltd

28 EXAMPLE 3 (cont) Resultant Force F R 69N 36.8N 58.8N Solution I From vector addition, direction angle θ is tan N 36.8N Copyright 011 Pearson Education South Asia Pte Ltd
29 EXAMPLE 3 (cont) Cartesian Vector Notation F1 = { 600 cos 30 i sin 30 j } N F = { -400 sin 45 i cos 45 j } N Solution II Thus, F R = F1 + F = (600 cos 30º N 400 sin 45º N) i + (600 sin 30º N cos 45º N) j = {36.8i j} N The magnitude and direction of F R are determined in the same manner as before. Copyright 011 Pearson Education South Asia Pte Ltd

30 CARTESIAN VECTORS Right-Handed Coordinate System A rectangular or Cartesian coordinate system is said to be right-handed provided: Thumb of right hand points in the direction of the positive z axis z-axis for the D problem would be perpendicular, directed out of the page.
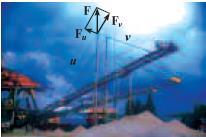
31 CARTESIAN VECTORS (cont) Rectangular Components of a Vector A vector A may have one, two or three rectangular components along the x, y and z axes, depending on orientation By two successive applications of the parallelogram law, A = A + A z A = A x + A y Combing the equations, A can be expressed as A = A x + A y + A z
32 CARTESIAN VECTORS (cont) Unit Vector Direction of A can be specified using a unit vector Unit vector has a magnitude of 1 If A is a vector having a magnitude of A 0, unit vector having the same direction as A is expressed by u A = A / A. So that A = A u A
33 CARTESIAN VECTORS (cont) Cartesian Vector Representations 3 components of A act in the positive i, j and k directions A = A x i + A y j + A Z k *Note the magnitude and direction of each components are separated, easing vector algebraic operations.
34 Magnitude of a Cartesian Vector From the colored triangle, From the shaded triangle, Combining the equations gives magnitude of A CARTESIAN VECTORS (cont) z y x A A A A ' y x A A A ' z A A A
35 CARTESIAN VECTORS (cont) Direction of a Cartesian Vector Orientation of A is defined as the coordinate direction angles α, β and γ measured between the tail of A and the positive x, y and z axes 0 α, β and γ 180 The direction cosines of A are cos A x A cos A z A cos A y A
36 CARTESIAN VECTORS (cont) Direction of a Cartesian Vector Angles α, β and γ can be determined by the inverse cosines Given A = A x i + A y j + A Z k then, u A = A /A = (A x /A)i + (A y /A)j + (A Z /A)k where A A x A y A z
37 CARTESIAN VECTORS (cont) Direction of a Cartesian Vector u A can also be expressed as u A = cosαi + cosβj + cosγk Since A A A A and u A = 1, we have cos x A as expressed in Cartesian vector form is A = Au A = Acosαi + Acosβj + Acosγk = A x i + A y j + A Z k y cos z cos 1
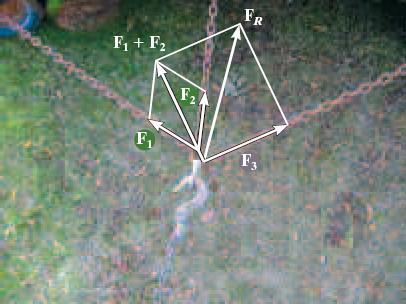
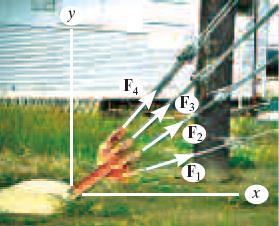
38 ADDITION AND SUBTRACTION OF CARTESIAN VECTORS Addition and Subtraction of Forces - Concurrent Force Systems: Force resultant is the vector sum of all the forces in the system F R = F = F x i + F y j + F z k

39 EXAMPLE 4 Express the force F as Cartesian vector. Copyright 011 Pearson Education South Asia Pte Ltd
40 EXAMPLE 4 (cont) Since two angles are specified, the third angle is found by cos cos cos cos cos 1 Two possibilities exist, namely 60 cos cos 0. 5 cos ± 0. 5 Solution cos Copyright 011 Pearson Education South Asia Pte Ltd
41 EXAMPLE 4 (cont) Solution By inspection, α = 60º since Fx is in the +x direction Given F = 00N F = Fcosαi + Fcosβj + Fcosγk = (00cos60ºN)i + (00cos60ºN)j + (00cos45ºN)k = {100.0i j k}N Checking: F F x F y F z N Copyright 011 Pearson Education South Asia Pte Ltd
42 POSITION VECTORS x,y,z Coordinates Right-handed coordinate system Positive z axis points upwards, measuring the height of an object or the altitude of a point Points are measured relative to the origin, O.
43 POSITION VECTORS (cont) Position Vector Position vector r is defined as a fixed vector which locates a point in space relative to another point. E.g. r = xi + yj + zk
44 POSITION VECTORS (cont) Position Vector Vector addition gives r A + r = r B Solving r = r B r A = (x B x A )i + (y B y A )j + (z B z A )k or r = (x B x A )i + (y B y A )j + (z B z A )k

45 POSITION VECTORS (cont) Length and direction of cable AB can be found by measuring A and B using the x, y, z axes Position vector r can be established Magnitude r represents the length of cable Angles, α, β and γ represent the direction of the cable Unit vector, u = r/r

46 EXAMPLE 5 An elastic rubber band is attached to points A and B. Determine its length and its direction measured from A towards B. Copyright 011 Pearson Education South Asia Pte Ltd
![EXAMPLE 5 (cont) Position vector r = [-m 1m]i + [m 0]j + [3m (-3m)]k = {-3i + j + 6k}m Solution Magnitude = length of the rubber](/docs-images/82/84944651/images/47-0.jpg "band 3 6 m r 7 Unit vector in the director of r u = r /r = -3/7i + /7j + 6/7k Copyright 011 Pearson Education South Asia Pte Ltd")
47 EXAMPLE 5 (cont) Position vector r = [-m 1m]i + [m 0]j + [3m (-3m)]k = {-3i + j + 6k}m Solution Magnitude = length of the rubber band 3 6 m r 7 Unit vector in the director of r u = r /r = -3/7i + /7j + 6/7k Copyright 011 Pearson Education South Asia Pte Ltd


48 EXAMPLE 5 (cont) Solution Copyright 011 Pearson Education South Asia Pte Ltd
49 FORCE VECTOR DIRECTED ALONG A LINE In 3D problems, direction of F is specified by points, through which its line of action lies F can be formulated as a Cartesian vector: F = F u = F (r/r) Note that F has the unit of force (N) unlike r, with the unit of length (m)

50 FORCE VECTOR DIRECTED ALONG A LINE (cont) Force F acting along the chain can be presented as a Cartesian vector by - Establish x, y, z axes - Form a position vector r along length of chain Unit vector, u = r/r that defines the direction of both the chain and the force We get F = Fu
51 EXAMPLE 6 The man pulls on the cord with a force of 350 N. Represent this force acting on the support A, as a Cartesian vector and determine its direction. Copyright 011 Pearson Education South Asia Pte Ltd
52 EXAMPLE 6 (cont) End points of the cord are: A (0m, 0m, 7.5m) and B (3m, -m, 1.5m) Solution r = (3m 0m)i + (-m 0m)j + (1.5m 7.5m)k = {3i j 6k}m Magnitude = length of cord AB 3m m 6m m r 7 Unit vector, u = r /r = 3/7i - /7j - 6/7k Copyright 011 Pearson Education South Asia Pte Ltd
 = {150i - 100j - 300k}N α = cos -1 (3/7) = 64.")
53 EXAMPLE 6 (cont) Force F has a magnitude of 350 N, direction specified by u. Solution F = Fu = 350N(3/7i - /7j - 6/7k) = {150i - 100j - 300k}N α = cos -1 (3/7) = 64.6 β = cos -1 (-/7) = 107 γ = cos -1 (-6/7) = 149 Copyright 011 Pearson Education South Asia Pte Ltd
54 DOT PRODUCT Dot product of vectors A and B is written as A B (Read A dot B) Define the magnitudes of A and B and the angle between their tails A B = AB cosθ where 0 θ 180 Referred to as scalar product of vectors as result is a scalar
55 DOT PRODUCT (cont) Laws of Operation 1. Commutative law A B = B A. Multiplication by a scalar a(a B) = (aa) B = A (ab) = (A B)a 3. Distributive law A (B + D) = (A B) + (A D)
56 DOT PRODUCT (cont) Cartesian Vector Formulation - Dot product of Cartesian unit vectors i i = (1)(1)cos0 = 1 i j = (1)(1)cos90 = 0 - Similarly i i = 1 j j = 1 k k = 1 i j = 0 i k = 1 j k = 1
57 DOT PRODUCT (cont) Cartesian Vector Formulation Dot product of vectors A and B is: A B = A x B x + A y B y + A z B z Applications The angle formed between two vectors or intersecting lines. θ = cos -1 [(A B)/(AB)] 0 θ 180 The components of a vector parallel and perpendicular to a line. A a = A cos θ = A u a

58 EXAMPLE 7 The frame is subjected to a horizontal force F = {300j} N. Determine the components of this force parallel and perpendicular to the member AB. Copyright 011 Pearson Education South Asia Pte Ltd
59 EXAMPLE 7 (cont) Solution Since r i j k u B 6 3 B rb 0.86i j 0.49k Thus FAB F. u B F 57.1N 6 3 cos 300 j 0.86i j 0.49k (0)(0.86) (300)(0.857) (0)(0.49) Copyright 011 Pearson Education South Asia Pte Ltd
60 EXAMPLE 7 (cont) Solution Since result is a positive scalar, F AB has the same sense of direction as u B. Expressed in Cartesian form: Perpendicular component: Copyright 011 Pearson Education South Asia Pte Ltd
61 EXAMPLE 7 (cont) Solution Magnitude can be determined from F or from Pythagorean Theorem, F F 300N 57.1N 155N F AB Copyright 011 Pearson Education South Asia Pte Ltd
62 CONCEPT QUIZ (cont) 1) Resolve F along x and y axes and write it in vector form. F = { } N a) 80 cos (30 ) i 80 sin (30 ) j b) 80 sin (30 ) i + 80 cos (30 ) j c) 80 sin (30 ) i 80 cos (30 ) j d) 80 cos (30 ) i + 80 sin (30 ) j y 30 x F = 80 N
63 CONCEPT QUIZ (cont) ) Determine the magnitude of the resultant (F1 + F) force in N when: F1 = {10i + 0j} N F = {0i + 0j} N a) 30 N b) 40 N c) 50 N d) 60 N e) 70 N
64 CONCEPT QUIZ (cont) 3) Vector algebra, as we are going to use it, is based on a coordinate system. a) Euclidean b) Left-handed c) Greek d) Right-handed e) Egyptian
65 CONCEPT QUIZ (cont) 4) The symbols,, and designate the of a 3-D Cartesian vector. a) Unit vectors b) Coordinate direction angles c) Greek societies d) X, Y and Z components
66 CONCEPT QUIZ (cont) 5) What is not true about a unit vector, u A? a) It is dimensionless. b) Its magnitude is one. c) It always points in the direction of the positive X-axis. d) It always points in the direction of vector A.
67 CONCEPT QUIZ (cont) 6) If F = { 10 i + 10 j + 10 k } N and G = { 0 i + 0 j + 0 k } N, then F + G = { } N a) 10 i + 10 j + 10 k b) 30 i + 0 j + 30 k c) 10 i 10 j 10 k d) 30 i + 30 j + 30 k
68 CONCEPT QUIZ (cont) 7) A position vector, r PQ, is obtained by a) Coordinates of Q minus coordinates of P a) Coordinates of P minus coordinates of Q a) Coordinates of Q minus coordinates of the origin a) Coordinates of the origin minus coordinates of P
69 CONCEPT QUIZ (cont) 8) A force of magnitude F, directed along a unit vector U, is given by F =. a) F (U) b) U / F c) F / U d) F + U e) F U
70 CONCEPT QUIZ (cont) 9) P and Q are two points in a 3-D space. How are the position vectors r PQ and r QP related? a) r PQ = r QP b) r PQ = - r QP c) r PQ = 1/r QP d) r PQ = r QP
71 CONCEPT QUIZ (cont) 10) Two points in 3 D space have coordinates of P (1,, 3) and Q (4, 5, 6) meters. The position vector r QP is given by a) {3 i + 3 j + 3 k} m b) { 3 i 3 j 3 k} m c) {5 i + 7 j + 9 k} m d) { 3 i + 3 j + 3 k} m e) {4 i + 5 j + 6 k} m
72 CONCEPT QUIZ (cont) 13) Force vector F directed along a line PQ is given by a) (F/ F) r PQ b) r PQ /r PQ c) F(r PQ /r PQ ) d) F(r PQ /r PQ ) 14) The dot product of two vectors P & Q is defined as a) P Q cos b) P Q sin c) P Q tan d) P Q sec P Q
73 CONCEPT QUIZ (cont) 15) The dot product can be used to find all of the following except. a) sum of two vectors b) angle between two vectors c) component of a vector parallel to another line d) component of a vector perpendicular to another line
74 CONCEPT QUIZ (cont) 16) Find the dot product of the two vectors P and Q. P = { 5 i + j + 3 k} m Q = {- i + 5 j + 4 k} m a) -1 m b) 1 m c) 1 m d) -1 m e) 10 m
Engineering Mechanics: Statics in SI Units, 12e Force Vectors
 Engineering Mechanics: Statics in SI Units, 1e orce Vectors 1 Chapter Objectives Parallelogram Law Cartesian vector form Dot product and angle between vectors Chapter Outline 1. Scalars and Vectors. Vector
Engineering Mechanics: Statics in SI Units, 1e orce Vectors 1 Chapter Objectives Parallelogram Law Cartesian vector form Dot product and angle between vectors Chapter Outline 1. Scalars and Vectors. Vector
2.1 Scalars and Vectors
 2.1 Scalars and Vectors Scalar A quantity characterized by a positive or negative number Indicated by letters in italic such as A e.g. Mass, volume and length 2.1 Scalars and Vectors Vector A quantity
2.1 Scalars and Vectors Scalar A quantity characterized by a positive or negative number Indicated by letters in italic such as A e.g. Mass, volume and length 2.1 Scalars and Vectors Vector A quantity
Engineering Mechanics: Statics in SI Units, 12e
 Engineering Mechanics: Statics in SI Units, 12e 2 Force Vectors 1 Chapter Objectives Parallelogram Law Cartesian vector form Dot product and an angle between two vectors 2 Chapter Outline 1. Scalars and
Engineering Mechanics: Statics in SI Units, 12e 2 Force Vectors 1 Chapter Objectives Parallelogram Law Cartesian vector form Dot product and an angle between two vectors 2 Chapter Outline 1. Scalars and
Ishik University / Sulaimani Civil Engineering Department. Chapter -2-
 Ishik University / Sulaimani Civil Engineering Department Chapter -- 1 orce Vectors Contents : 1. Scalars and Vectors. Vector Operations 3. Vector Addition of orces 4. Addition of a System of Coplanar
Ishik University / Sulaimani Civil Engineering Department Chapter -- 1 orce Vectors Contents : 1. Scalars and Vectors. Vector Operations 3. Vector Addition of orces 4. Addition of a System of Coplanar
Course Overview. Statics (Freshman Fall) Dynamics: x(t)= f(f(t)) displacement as a function of time and applied force
 Dynamics: x(t)= f(f(t)) displacement as a function of time and applied force") Course Overview Statics (Freshman Fall) Engineering Mechanics Dynamics (Freshman Spring) Strength of Materials (Sophomore Fall) Mechanism Kinematics and Dynamics (Sophomore Spring ) Aircraft structures
Course Overview Statics (Freshman Fall) Engineering Mechanics Dynamics (Freshman Spring) Strength of Materials (Sophomore Fall) Mechanism Kinematics and Dynamics (Sophomore Spring ) Aircraft structures
MECHANICS. Prepared by Engr. John Paul Timola
 MECHANICS Prepared by Engr. John Paul Timola MECHANICS a branch of the physical sciences that is concerned with the state of rest or motion of bodies that are subjected to the action of forces. subdivided
MECHANICS Prepared by Engr. John Paul Timola MECHANICS a branch of the physical sciences that is concerned with the state of rest or motion of bodies that are subjected to the action of forces. subdivided
Engineering Mechanics Statics
 Mechanical Systems Engineering- 2016 Engineering Mechanics Statics 2. Force Vectors; Operations on Vectors Dr. Rami Zakaria MECHANICS, UNITS, NUMERICAL CALCULATIONS & GENERAL PROCEDURE FOR ANALYSIS Today
Mechanical Systems Engineering- 2016 Engineering Mechanics Statics 2. Force Vectors; Operations on Vectors Dr. Rami Zakaria MECHANICS, UNITS, NUMERICAL CALCULATIONS & GENERAL PROCEDURE FOR ANALYSIS Today
Chapter 2: Force Vectors
 Chapter 2: Force Vectors Chapter Objectives To show how to add forces and resolve them into components using the Parallelogram Law. To express force and position in Cartesian vector form and explain how
Chapter 2: Force Vectors Chapter Objectives To show how to add forces and resolve them into components using the Parallelogram Law. To express force and position in Cartesian vector form and explain how
2-9. The plate is subjected to the forces acting on members A and B as shown. If θ = 60 o, determine the magnitude of the resultant of these forces
 2-9. The plate is subjected to the forces acting on members A and B as shown. If θ 60 o, determine the magnitude of the resultant of these forces and its direction measured clockwise from the positie x
2-9. The plate is subjected to the forces acting on members A and B as shown. If θ 60 o, determine the magnitude of the resultant of these forces and its direction measured clockwise from the positie x
POSITION VECTORS & FORCE VECTORS
 POSITION VECTORS & FORCE VECTORS Today s Objectives: Students will be able to : a) Represent a position vector in Cartesian coordinate form, from given geometry. b) Represent a force vector directed along
POSITION VECTORS & FORCE VECTORS Today s Objectives: Students will be able to : a) Represent a position vector in Cartesian coordinate form, from given geometry. b) Represent a force vector directed along
CE 201 Statics. 2 Physical Sciences. Rigid-Body Deformable-Body Fluid Mechanics Mechanics Mechanics
 CE 201 Statics 2 Physical Sciences Branch of physical sciences 16 concerned with the state of Mechanics rest motion of bodies that are subjected to the action of forces Rigid-Body Deformable-Body Fluid
CE 201 Statics 2 Physical Sciences Branch of physical sciences 16 concerned with the state of Mechanics rest motion of bodies that are subjected to the action of forces Rigid-Body Deformable-Body Fluid
Chapter 8 Vectors and Scalars
 Chapter 8 193 Vectors and Scalars Chapter 8 Vectors and Scalars 8.1 Introduction: In this chapter we shall use the ideas of the plane to develop a new mathematical concept, vector. If you have studied
Chapter 8 193 Vectors and Scalars Chapter 8 Vectors and Scalars 8.1 Introduction: In this chapter we shall use the ideas of the plane to develop a new mathematical concept, vector. If you have studied
Chapter 2 Statics of Particles. Resultant of Two Forces 8/28/2014. The effects of forces on particles:
 Chapter 2 Statics of Particles The effects of forces on particles: - replacing multiple forces acting on a particle with a single equivalent or resultant force, - relations between forces acting on a particle
Chapter 2 Statics of Particles The effects of forces on particles: - replacing multiple forces acting on a particle with a single equivalent or resultant force, - relations between forces acting on a particle
Quiz No. 1: Tuesday Jan. 31. Assignment No. 2, due Thursday Feb 2: Problems 8.4, 8.13, 3.10, 3.28 Conceptual questions: 8.1, 3.6, 3.12, 3.
 Quiz No. 1: Tuesday Jan. 31 Assignment No. 2, due Thursday Feb 2: Problems 8.4, 8.13, 3.10, 3.28 Conceptual questions: 8.1, 3.6, 3.12, 3.20 Chapter 3 Vectors and Two-Dimensional Kinematics Properties of
Quiz No. 1: Tuesday Jan. 31 Assignment No. 2, due Thursday Feb 2: Problems 8.4, 8.13, 3.10, 3.28 Conceptual questions: 8.1, 3.6, 3.12, 3.20 Chapter 3 Vectors and Two-Dimensional Kinematics Properties of
Department of Physics, Korea University
 Name: Department: Notice +2 ( 1) points per correct (incorrect) answer. No penalty for an unanswered question. Fill the blank ( ) with (8) if the statement is correct (incorrect).!!!: corrections to an
Name: Department: Notice +2 ( 1) points per correct (incorrect) answer. No penalty for an unanswered question. Fill the blank ( ) with (8) if the statement is correct (incorrect).!!!: corrections to an
scalar and - vector - - presentation SCALAR AND VECTOR
 http://www.slideshare.net/fikrifadzal/chapter-14scalar-and-vector- and presentation SCLR ND VECTOR Scalars Scalars are quantities which have magnitude without directioni Examples of scalars temperaturere
http://www.slideshare.net/fikrifadzal/chapter-14scalar-and-vector- and presentation SCLR ND VECTOR Scalars Scalars are quantities which have magnitude without directioni Examples of scalars temperaturere
DOT PRODUCT. Statics, Fourteenth Edition in SI Units R.C. Hibbeler. Copyright 2017 by Pearson Education, Ltd. All rights reserved.
 DOT PRODUCT Today s Objective: Students will be able to use the vector dot product to: a) determine an angle between two vectors and, b) determine the projection of a vector along a specified line. In-Class
DOT PRODUCT Today s Objective: Students will be able to use the vector dot product to: a) determine an angle between two vectors and, b) determine the projection of a vector along a specified line. In-Class
2- Scalars and Vectors
 2- Scalars and Vectors Scalars : have magnitude only : Length, time, mass, speed and volume is example of scalar. v Vectors : have magnitude and direction. v The magnitude of is written v v Position, displacement,
2- Scalars and Vectors Scalars : have magnitude only : Length, time, mass, speed and volume is example of scalar. v Vectors : have magnitude and direction. v The magnitude of is written v v Position, displacement,
Prepared by: M. S. KumarSwamy, TGT(Maths) Page
 Page") Prepared by: M S KumarSwamy, TGT(Maths) Page - 119 - CHAPTER 10: VECTOR ALGEBRA QUICK REVISION (Important Concepts & Formulae) MARKS WEIGHTAGE 06 marks Vector The line l to the line segment AB, then a
Prepared by: M S KumarSwamy, TGT(Maths) Page - 119 - CHAPTER 10: VECTOR ALGEBRA QUICK REVISION (Important Concepts & Formulae) MARKS WEIGHTAGE 06 marks Vector The line l to the line segment AB, then a
Chap. 3 Rigid Bodies: Equivalent Systems of Forces. External/Internal Forces; Equivalent Forces
 Chap. 3 Rigid Bodies: Equivalent Systems of Forces Treatment of a body as a single particle is not always possible. In general, the size of the body and the specific points of application of the forces
Chap. 3 Rigid Bodies: Equivalent Systems of Forces Treatment of a body as a single particle is not always possible. In general, the size of the body and the specific points of application of the forces
Review of Coordinate Systems
 Vector in 2 R and 3 R Review of Coordinate Systems Used to describe the position of a point in space Common coordinate systems are: Cartesian Polar Cartesian Coordinate System Also called rectangular coordinate
Vector in 2 R and 3 R Review of Coordinate Systems Used to describe the position of a point in space Common coordinate systems are: Cartesian Polar Cartesian Coordinate System Also called rectangular coordinate
Vector is a quantity which has both magnitude and direction. We will use the arrow to designate vectors.
 In this section, we will study the fundamental operations (addition, resolving vectors into components) of force vectors. Vector is a quantity which has both magnitude and direction. We will use the arrow
In this section, we will study the fundamental operations (addition, resolving vectors into components) of force vectors. Vector is a quantity which has both magnitude and direction. We will use the arrow
Mechanics: Scalars and Vectors
 Mechanics: Scalars and Vectors Scalar Onl magnitude is associated with it Vector e.g., time, volume, densit, speed, energ, mass etc. Possess direction as well as magnitude Parallelogram law of addition
Mechanics: Scalars and Vectors Scalar Onl magnitude is associated with it Vector e.g., time, volume, densit, speed, energ, mass etc. Possess direction as well as magnitude Parallelogram law of addition
Engineering Mechanics Statics
 Mechanical Systems Engineering -2016 Engineering Mechanics Statics 3. Force Vectors; Position Vector & Dot product Position Vector A position vector is a fixed vector that locates a point in space relative
Mechanical Systems Engineering -2016 Engineering Mechanics Statics 3. Force Vectors; Position Vector & Dot product Position Vector A position vector is a fixed vector that locates a point in space relative
Mathematical review trigonometry vectors Motion in one dimension
 Mathematical review trigonometry vectors Motion in one dimension Used to describe the position of a point in space Coordinate system (frame) consists of a fixed reference point called the origin specific
Mathematical review trigonometry vectors Motion in one dimension Used to describe the position of a point in space Coordinate system (frame) consists of a fixed reference point called the origin specific
Engineering Mechanics. Electrical Engineering. First stage
 Assist AliA. A Engineering Mechanics Electrical Engineering First stage Syllabus Static 1- General Princples 2- System of Forces 3- Composition and Resolution of Foreces Moments 5- Equilibrium 6- Trusses
Assist AliA. A Engineering Mechanics Electrical Engineering First stage Syllabus Static 1- General Princples 2- System of Forces 3- Composition and Resolution of Foreces Moments 5- Equilibrium 6- Trusses
Physics 40 Chapter 3: Vectors
 Physics 40 Chapter 3: Vectors Cartesian Coordinate System Also called rectangular coordinate system x-and y- axes intersect at the origin Points are labeled (x,y) Polar Coordinate System Origin and reference
Physics 40 Chapter 3: Vectors Cartesian Coordinate System Also called rectangular coordinate system x-and y- axes intersect at the origin Points are labeled (x,y) Polar Coordinate System Origin and reference
Vectors. Introduction
 Chapter 3 Vectors Vectors Vector quantities Physical quantities that have both numerical and directional properties Mathematical operations of vectors in this chapter Addition Subtraction Introduction
Chapter 3 Vectors Vectors Vector quantities Physical quantities that have both numerical and directional properties Mathematical operations of vectors in this chapter Addition Subtraction Introduction
DATE: MATH ANALYSIS 2 CHAPTER 12: VECTORS & DETERMINANTS
 NAME: PERIOD: DATE: MATH ANALYSIS 2 MR. MELLINA CHAPTER 12: VECTORS & DETERMINANTS Sections: v 12.1 Geometric Representation of Vectors v 12.2 Algebraic Representation of Vectors v 12.3 Vector and Parametric
NAME: PERIOD: DATE: MATH ANALYSIS 2 MR. MELLINA CHAPTER 12: VECTORS & DETERMINANTS Sections: v 12.1 Geometric Representation of Vectors v 12.2 Algebraic Representation of Vectors v 12.3 Vector and Parametric
Force System Resultants. Engineering Mechanics: Statics
 Force System Resultants Engineering Mechanics: Statics Chapter Objectives To discuss the concept of the moment of a force and show how to calculate it in 2-D and 3-D systems. Definition of the moment of
Force System Resultants Engineering Mechanics: Statics Chapter Objectives To discuss the concept of the moment of a force and show how to calculate it in 2-D and 3-D systems. Definition of the moment of
VECTORS. Given two vectors! and! we can express the law of vector addition geometrically. + = Fig. 1 Geometrical definition of vector addition
 VECTORS Vectors in 2- D and 3- D in Euclidean space or flatland are easy compared to vectors in non- Euclidean space. In Cartesian coordinates we write a component of a vector as where the index i stands
VECTORS Vectors in 2- D and 3- D in Euclidean space or flatland are easy compared to vectors in non- Euclidean space. In Cartesian coordinates we write a component of a vector as where the index i stands
Vectors and 2D Kinematics. AIT AP Physics C
 Vectors and 2D Kinematics Coordinate Systems Used to describe the position of a point in space Coordinate system consists of a fixed reference point called the origin specific axes with scales and labels
Vectors and 2D Kinematics Coordinate Systems Used to describe the position of a point in space Coordinate system consists of a fixed reference point called the origin specific axes with scales and labels
Chapter 3. Vectors and. Two-Dimensional Motion Vector vs. Scalar Review
 Chapter 3 Vectors and Two-Dimensional Motion Vector vs. Scalar Review All physical quantities encountered in this text will be either a scalar or a vector A vector quantity has both magnitude (size) and
Chapter 3 Vectors and Two-Dimensional Motion Vector vs. Scalar Review All physical quantities encountered in this text will be either a scalar or a vector A vector quantity has both magnitude (size) and
Vector/Matrix operations. *Remember: All parts of HW 1 are due on 1/31 or 2/1
 Lecture 4: Topics: Linear Algebra II Vector/Matrix operations Homework: HW, Part *Remember: All parts of HW are due on / or / Solving Axb Row reduction method can be used Simple operations on equations
Lecture 4: Topics: Linear Algebra II Vector/Matrix operations Homework: HW, Part *Remember: All parts of HW are due on / or / Solving Axb Row reduction method can be used Simple operations on equations
General Physics I, Spring Vectors
 General Physics I, Spring 2011 Vectors 1 Vectors: Introduction A vector quantity in physics is one that has a magnitude (absolute value) and a direction. We have seen three already: displacement, velocity,
General Physics I, Spring 2011 Vectors 1 Vectors: Introduction A vector quantity in physics is one that has a magnitude (absolute value) and a direction. We have seen three already: displacement, velocity,
Vectors. Introduction. Prof Dr Ahmet ATAÇ
 Chapter 3 Vectors Vectors Vector quantities Physical quantities that have both n u m e r i c a l a n d d i r e c t i o n a l properties Mathematical operations of vectors in this chapter A d d i t i o
Chapter 3 Vectors Vectors Vector quantities Physical quantities that have both n u m e r i c a l a n d d i r e c t i o n a l properties Mathematical operations of vectors in this chapter A d d i t i o
Chapter 2 One-Dimensional Kinematics
 Review: Chapter 2 One-Dimensional Kinematics Description of motion in one dimension Copyright 2010 Pearson Education, Inc. Review: Motion with Constant Acceleration Free fall: constant acceleration g =
Review: Chapter 2 One-Dimensional Kinematics Description of motion in one dimension Copyright 2010 Pearson Education, Inc. Review: Motion with Constant Acceleration Free fall: constant acceleration g =
UNIT-05 VECTORS. 3. Utilize the characteristics of two or more vectors that are concurrent, or collinear, or coplanar.
 UNIT-05 VECTORS Introduction: physical quantity that can be specified by just a number the magnitude is known as a scalar. In everyday life you deal mostly with scalars such as time, temperature, length
UNIT-05 VECTORS Introduction: physical quantity that can be specified by just a number the magnitude is known as a scalar. In everyday life you deal mostly with scalars such as time, temperature, length
1.1 Bound and Free Vectors. 1.2 Vector Operations
 1 Vectors Vectors are used when both the magnitude and the direction of some physical quantity are required. Examples of such quantities are velocity, acceleration, force, electric and magnetic fields.
1 Vectors Vectors are used when both the magnitude and the direction of some physical quantity are required. Examples of such quantities are velocity, acceleration, force, electric and magnetic fields.
Ishik University / Sulaimani Architecture Department Structure ARCH 214 Chapter -4- Force System Resultant
 Ishik University / Sulaimani Architecture Department 1 Structure ARCH 214 Chapter -4- Force System Resultant 2 1 CHAPTER OBJECTIVES To discuss the concept of the moment of a force and show how to calculate
Ishik University / Sulaimani Architecture Department 1 Structure ARCH 214 Chapter -4- Force System Resultant 2 1 CHAPTER OBJECTIVES To discuss the concept of the moment of a force and show how to calculate
GEOMETRY AND VECTORS
 GEOMETRY AND VECTORS Distinguishing Between Points in Space One Approach Names: ( Fred, Steve, Alice...) Problem: distance & direction must be defined point-by-point More elegant take advantage of geometry
GEOMETRY AND VECTORS Distinguishing Between Points in Space One Approach Names: ( Fred, Steve, Alice...) Problem: distance & direction must be defined point-by-point More elegant take advantage of geometry
POSITION VECTORS & FORCE VECTORS
 POSITION VECTORS & FORCE VECTORS Today s Objectives: Students will be able to : a) Represent a position vector in Cartesian coordinate form, from given geometry. b) Represent a force vector directed along
POSITION VECTORS & FORCE VECTORS Today s Objectives: Students will be able to : a) Represent a position vector in Cartesian coordinate form, from given geometry. b) Represent a force vector directed along
Chapter 2: Statics of Particles
 CE297-A09-Ch2 Page 1 Wednesday, August 26, 2009 4:18 AM Chapter 2: Statics of Particles 2.1-2.3 orces as Vectors & Resultants orces are drawn as directed arrows. The length of the arrow represents the
CE297-A09-Ch2 Page 1 Wednesday, August 26, 2009 4:18 AM Chapter 2: Statics of Particles 2.1-2.3 orces as Vectors & Resultants orces are drawn as directed arrows. The length of the arrow represents the
Chapter 3. Vectors and Two-Dimensional Motion
 Chapter 3 Vectors and Two-Dimensional Motion 1 Vector vs. Scalar Review All physical quantities encountered in this text will be either a scalar or a vector A vector quantity has both magnitude (size)
Chapter 3 Vectors and Two-Dimensional Motion 1 Vector vs. Scalar Review All physical quantities encountered in this text will be either a scalar or a vector A vector quantity has both magnitude (size)
Chapter 2 - Vector Algebra
 A spatial vector, or simply vector, is a concept characterized by a magnitude and a direction, and which sums with other vectors according to the Parallelogram Law. A vector can be thought of as an arrow
A spatial vector, or simply vector, is a concept characterized by a magnitude and a direction, and which sums with other vectors according to the Parallelogram Law. A vector can be thought of as an arrow
SECTION 6.3: VECTORS IN THE PLANE
 (Section 6.3: Vectors in the Plane) 6.18 SECTION 6.3: VECTORS IN THE PLANE Assume a, b, c, and d are real numbers. PART A: INTRO A scalar has magnitude but not direction. We think of real numbers as scalars,
(Section 6.3: Vectors in the Plane) 6.18 SECTION 6.3: VECTORS IN THE PLANE Assume a, b, c, and d are real numbers. PART A: INTRO A scalar has magnitude but not direction. We think of real numbers as scalars,
CHAPTER 3 : VECTORS. Definition 3.1 A vector is a quantity that has both magnitude and direction.
 EQT 101-Engineering Mathematics I Teaching Module CHAPTER 3 : VECTORS 3.1 Introduction Definition 3.1 A ector is a quantity that has both magnitude and direction. A ector is often represented by an arrow
EQT 101-Engineering Mathematics I Teaching Module CHAPTER 3 : VECTORS 3.1 Introduction Definition 3.1 A ector is a quantity that has both magnitude and direction. A ector is often represented by an arrow
Chapter -4- Force System Resultant
 Ishik University / Sulaimani Civil Engineering Department Chapter -4- Force System Resultant 1 2 1 CHAPTER OBJECTIVES To discuss the concept of the moment of a force and show how to calculate it in two
Ishik University / Sulaimani Civil Engineering Department Chapter -4- Force System Resultant 1 2 1 CHAPTER OBJECTIVES To discuss the concept of the moment of a force and show how to calculate it in two
Omm Al-Qura University Dr. Abdulsalam Ai LECTURE OUTLINE CHAPTER 3. Vectors in Physics
 LECTURE OUTLINE CHAPTER 3 Vectors in Physics 3-1 Scalars Versus Vectors Scalar a numerical value (number with units). May be positive or negative. Examples: temperature, speed, height, and mass. Vector
LECTURE OUTLINE CHAPTER 3 Vectors in Physics 3-1 Scalars Versus Vectors Scalar a numerical value (number with units). May be positive or negative. Examples: temperature, speed, height, and mass. Vector
VECTORS. 3-1 What is Physics? 3-2 Vectors and Scalars CHAPTER
 CHAPTER 3 VECTORS 3-1 What is Physics? Physics deals with a great many quantities that have both size and direction, and it needs a special mathematical language the language of vectors to describe those
CHAPTER 3 VECTORS 3-1 What is Physics? Physics deals with a great many quantities that have both size and direction, and it needs a special mathematical language the language of vectors to describe those
ARC241 Structural Analysis I Lecture 1, Sections ST1.1 ST2.4
 Lecture 1, Sections ST1.1 ST2.4 ST1.1-ST1.2) Introduction ST1.3) Units of Measurements ST1.4) The International System (SI) of Units ST1.5) Numerical Calculations ST1.6) General Procedure of Analysis ST2.1)
Lecture 1, Sections ST1.1 ST2.4 ST1.1-ST1.2) Introduction ST1.3) Units of Measurements ST1.4) The International System (SI) of Units ST1.5) Numerical Calculations ST1.6) General Procedure of Analysis ST2.1)
 For a general development of the theoretical aspects of mechanics, however, a more rigorous treatment is possible by using vector analysis. A vector may be denoted by drawing a short arrow above the letter
For a general development of the theoretical aspects of mechanics, however, a more rigorous treatment is possible by using vector analysis. A vector may be denoted by drawing a short arrow above the letter
MAT 1339-S14 Class 8
 MAT 1339-S14 Class 8 July 28, 2014 Contents 7.2 Review Dot Product........................... 2 7.3 Applications of the Dot Product..................... 4 7.4 Vectors in Three-Space.........................
MAT 1339-S14 Class 8 July 28, 2014 Contents 7.2 Review Dot Product........................... 2 7.3 Applications of the Dot Product..................... 4 7.4 Vectors in Three-Space.........................
The Study of Concurrent Forces with the Force Table
 The Study of Concurrent Forces with the Force Table Apparatus: Force table with 4 pulleys, centering ring and string, 50 g weight hangers, slotted weights, protractors, and rulers. Discussion: The force
The Study of Concurrent Forces with the Force Table Apparatus: Force table with 4 pulleys, centering ring and string, 50 g weight hangers, slotted weights, protractors, and rulers. Discussion: The force
Coordinate Systems. Chapter 3. Cartesian Coordinate System. Polar Coordinate System
 Chapter 3 Vectors Coordinate Systems Used to describe the position of a point in space Coordinate system consists of a fixed reference point called the origin specific axes with scales and labels instructions
Chapter 3 Vectors Coordinate Systems Used to describe the position of a point in space Coordinate system consists of a fixed reference point called the origin specific axes with scales and labels instructions
ENGR-1100 Introduction to Engineering Analysis. Lecture 3
 ENGR-1100 Introduction to Engineering Analysis Lecture 3 POSITION VECTORS & FORCE VECTORS Today s Objectives: Students will be able to : a) Represent a position vector in Cartesian coordinate form, from
ENGR-1100 Introduction to Engineering Analysis Lecture 3 POSITION VECTORS & FORCE VECTORS Today s Objectives: Students will be able to : a) Represent a position vector in Cartesian coordinate form, from
Introduction to Engineering Mechanics
 Introduction to Engineering Mechanics Statics October 2009 () Introduction 10/09 1 / 19 Engineering mechanics Engineering mechanics is the physical science that deals with the behavior of bodies under
Introduction to Engineering Mechanics Statics October 2009 () Introduction 10/09 1 / 19 Engineering mechanics Engineering mechanics is the physical science that deals with the behavior of bodies under
Tenth Edition STATICS 1 Ferdinand P. Beer E. Russell Johnston, Jr. David F. Mazurek Lecture Notes: John Chen California Polytechnic State University
 T E CHAPTER 1 VECTOR MECHANICS FOR ENGINEERS: STATICS Ferdinand P. Beer E. Russell Johnston, Jr. David F. Mazurek Lecture Notes: Introduction John Chen California Polytechnic State University! Contents
T E CHAPTER 1 VECTOR MECHANICS FOR ENGINEERS: STATICS Ferdinand P. Beer E. Russell Johnston, Jr. David F. Mazurek Lecture Notes: Introduction John Chen California Polytechnic State University! Contents
10.2,3,4. Vectors in 3D, Dot products and Cross Products
 Name: Section: 10.2,3,4. Vectors in 3D, Dot products and Cross Products 1. Sketch the plane parallel to the xy-plane through (2, 4, 2) 2. For the given vectors u and v, evaluate the following expressions.
Name: Section: 10.2,3,4. Vectors in 3D, Dot products and Cross Products 1. Sketch the plane parallel to the xy-plane through (2, 4, 2) 2. For the given vectors u and v, evaluate the following expressions.
a b = a a a and that has been used here. ( )
") Review Eercise ( i j+ k) ( i+ j k) i j k = = i j+ k (( ) ( ) ) (( ) ( ) ) (( ) ( ) ) = i j+ k = ( ) i ( ( )) j+ ( ) k = j k Hence ( ) ( i j+ k) ( i+ j k) = ( ) + ( ) = 8 = Formulae for finding the vector
Review Eercise ( i j+ k) ( i+ j k) i j k = = i j+ k (( ) ( ) ) (( ) ( ) ) (( ) ( ) ) = i j+ k = ( ) i ( ( )) j+ ( ) k = j k Hence ( ) ( i j+ k) ( i+ j k) = ( ) + ( ) = 8 = Formulae for finding the vector
Objectives and Essential Questions
 VECTORS Objectives and Essential Questions Objectives Distinguish between basic trigonometric functions (SOH CAH TOA) Distinguish between vector and scalar quantities Add vectors using graphical and analytical
VECTORS Objectives and Essential Questions Objectives Distinguish between basic trigonometric functions (SOH CAH TOA) Distinguish between vector and scalar quantities Add vectors using graphical and analytical
Unit 1 Representing and Operations with Vectors. Over the years you have come to accept various mathematical concepts or properties:
 Lesson1.notebook November 27, 2012 Algebra Unit 1 Representing and Operations with Vectors Over the years you have come to accept various mathematical concepts or properties: Communative Property Associative
Lesson1.notebook November 27, 2012 Algebra Unit 1 Representing and Operations with Vectors Over the years you have come to accept various mathematical concepts or properties: Communative Property Associative
Vector components and motion
 Vector components and motion Objectives Distinguish between vectors and scalars and give examples of each. Use vector diagrams to interpret the relationships among vector quantities such as force and acceleration.
Vector components and motion Objectives Distinguish between vectors and scalars and give examples of each. Use vector diagrams to interpret the relationships among vector quantities such as force and acceleration.
Chapter 3 Vectors Prof. Raymond Lee, revised
 Chapter 3 Vectors Prof. Raymond Lee, revised 9-2-2010 1 Coordinate systems Used to describe a point s position in space Coordinate system consists of fixed reference point called origin specific axes with
Chapter 3 Vectors Prof. Raymond Lee, revised 9-2-2010 1 Coordinate systems Used to describe a point s position in space Coordinate system consists of fixed reference point called origin specific axes with
Vectors and the Geometry of Space
 Vectors and the Geometry of Space Many quantities in geometry and physics, such as area, volume, temperature, mass, and time, can be characterized by a single real number scaled to appropriate units of
Vectors and the Geometry of Space Many quantities in geometry and physics, such as area, volume, temperature, mass, and time, can be characterized by a single real number scaled to appropriate units of
STATICS. FE Review. Statics, Fourteenth Edition R.C. Hibbeler. Copyright 2016 by Pearson Education, Inc. All rights reserved.
 STATICS FE Review 1. Resultants of force systems VECTOR OPERATIONS (Section 2.2) Scalar Multiplication and Division VECTOR ADDITION USING EITHER THE PARALLELOGRAM LAW OR TRIANGLE Parallelogram Law: Triangle
STATICS FE Review 1. Resultants of force systems VECTOR OPERATIONS (Section 2.2) Scalar Multiplication and Division VECTOR ADDITION USING EITHER THE PARALLELOGRAM LAW OR TRIANGLE Parallelogram Law: Triangle
Statics deal with the condition of equilibrium of bodies acted upon by forces.
 Mechanics It is defined as that branch of science, which describes and predicts the conditions of rest or motion of bodies under the action of forces. Engineering mechanics applies the principle of mechanics
Mechanics It is defined as that branch of science, which describes and predicts the conditions of rest or motion of bodies under the action of forces. Engineering mechanics applies the principle of mechanics
141EE0402-Engineering Mechanics. UNIT- I : Basics and Statics of Particles
 141EE0402-Engineering Mechanics UNIT- I : Basics and Statics of Particles Force Force is an agent which produces or tends to produce, destroys or tends to destroy the motion of body or particles. Vector
141EE0402-Engineering Mechanics UNIT- I : Basics and Statics of Particles Force Force is an agent which produces or tends to produce, destroys or tends to destroy the motion of body or particles. Vector
VECTORS. Vectors OPTIONAL - I Vectors and three dimensional Geometry
 Vectors OPTIONAL - I 32 VECTORS In day to day life situations, we deal with physical quantities such as distance, speed, temperature, volume etc. These quantities are sufficient to describe change of position,
Vectors OPTIONAL - I 32 VECTORS In day to day life situations, we deal with physical quantities such as distance, speed, temperature, volume etc. These quantities are sufficient to describe change of position,
Vector Operations. Vector Operations. Graphical Operations. Component Operations. ( ) ˆk
 ˆk") Vector Operations Vector Operations ME 202 Multiplication by a scalar Addition/subtraction Scalar multiplication (dot product) Vector multiplication (cross product) 1 2 Graphical Operations Component Operations
Vector Operations Vector Operations ME 202 Multiplication by a scalar Addition/subtraction Scalar multiplication (dot product) Vector multiplication (cross product) 1 2 Graphical Operations Component Operations
Math 2433 Notes Week The Dot Product. The angle between two vectors is found with this formula: cosθ = a b
 Math 2433 Notes Week 2 11.3 The Dot Product The angle between two vectors is found with this formula: cosθ = a b a b 3) Given, a = 4i + 4j, b = i - 2j + 3k, c = 2i + 2k Find the angle between a and c Projection
Math 2433 Notes Week 2 11.3 The Dot Product The angle between two vectors is found with this formula: cosθ = a b a b 3) Given, a = 4i + 4j, b = i - 2j + 3k, c = 2i + 2k Find the angle between a and c Projection
two forces and moments Structural Math Physics for Structures Structural Math
 RHITETURL STRUTURES: ORM, EHVIOR, ND DESIGN DR. NNE NIHOLS SUMMER 05 lecture two forces and moments orces & Moments rchitectural Structures 009abn Structural Math quantify environmental loads how big is
RHITETURL STRUTURES: ORM, EHVIOR, ND DESIGN DR. NNE NIHOLS SUMMER 05 lecture two forces and moments orces & Moments rchitectural Structures 009abn Structural Math quantify environmental loads how big is
Definition 6.1. A vector is a quantity with both a magnitude (size) and direction. Figure 6.1: Some vectors.
 and direction. Figure 6.1: Some vectors.") Chapter 6 Vectors 6.1 Introduction Definition 6.1. A vector is a quantity with both a magnitude (size) and direction. Many quantities in engineering applications can be described by vectors, e.g. force,
Chapter 6 Vectors 6.1 Introduction Definition 6.1. A vector is a quantity with both a magnitude (size) and direction. Many quantities in engineering applications can be described by vectors, e.g. force,
Kinematics in Two Dimensions; Vectors
 Kinematics in Two Dimensions; Vectors Vectors & Scalars!! Scalars They are specified only by a number and units and have no direction associated with them, such as time, mass, and temperature.!! Vectors
Kinematics in Two Dimensions; Vectors Vectors & Scalars!! Scalars They are specified only by a number and units and have no direction associated with them, such as time, mass, and temperature.!! Vectors
Chapter 2 A Mathematical Toolbox
 Chapter 2 Mathematical Toolbox Vectors and Scalars 1) Scalars have only a magnitude (numerical value) Denoted by a symbol, a 2) Vectors have a magnitude and direction Denoted by a bold symbol (), or symbol
Chapter 2 Mathematical Toolbox Vectors and Scalars 1) Scalars have only a magnitude (numerical value) Denoted by a symbol, a 2) Vectors have a magnitude and direction Denoted by a bold symbol (), or symbol
Vectors (Trigonometry Explanation)
") Vectors (Trigonometry Explanation) CK12 Editor Say Thanks to the Authors Click http://www.ck12.org/saythanks (No sign in required) To access a customizable version of this book, as well as other interactive
Vectors (Trigonometry Explanation) CK12 Editor Say Thanks to the Authors Click http://www.ck12.org/saythanks (No sign in required) To access a customizable version of this book, as well as other interactive
CHAPTER 10 VECTORS POINTS TO REMEMBER
 For more important questions visit : www4onocom CHAPTER 10 VECTORS POINTS TO REMEMBER A quantity that has magnitude as well as direction is called a vector It is denoted by a directed line segment Two
For more important questions visit : www4onocom CHAPTER 10 VECTORS POINTS TO REMEMBER A quantity that has magnitude as well as direction is called a vector It is denoted by a directed line segment Two
Notes: Vectors and Scalars
 A particle moving along a straight line can move in only two directions and we can specify which directions with a plus or negative sign. For a particle moving in three dimensions; however, a plus sign
A particle moving along a straight line can move in only two directions and we can specify which directions with a plus or negative sign. For a particle moving in three dimensions; however, a plus sign
Vectors in Physics. Topics to review:
 Vectors in Physics Topics to review: Scalars Versus Vectors The Components of a Vector Adding and Subtracting Vectors Unit Vectors Position, Displacement, Velocity, and Acceleration Vectors Relative Motion
Vectors in Physics Topics to review: Scalars Versus Vectors The Components of a Vector Adding and Subtracting Vectors Unit Vectors Position, Displacement, Velocity, and Acceleration Vectors Relative Motion
ENT 151 STATICS. Statics of Particles. Contents. Resultant of Two Forces. Introduction
 CHAPTER ENT 151 STATICS Lecture Notes: Azizul bin Mohamad KUKUM Statics of Particles Contents Introduction Resultant of Two Forces Vectors Addition of Vectors Resultant of Several Concurrent Forces Sample
CHAPTER ENT 151 STATICS Lecture Notes: Azizul bin Mohamad KUKUM Statics of Particles Contents Introduction Resultant of Two Forces Vectors Addition of Vectors Resultant of Several Concurrent Forces Sample
Three-Dimensional Coordinate Systems. Three-Dimensional Coordinate Systems. Three-Dimensional Coordinate Systems. Three-Dimensional Coordinate Systems
 To locate a point in a plane, two numbers are necessary. We know that any point in the plane can be represented as an ordered pair (a, b) of real numbers, where a is the x-coordinate and b is the y-coordinate.
To locate a point in a plane, two numbers are necessary. We know that any point in the plane can be represented as an ordered pair (a, b) of real numbers, where a is the x-coordinate and b is the y-coordinate.
Chapter 2 Mechanical Equilibrium
 Chapter 2 Mechanical Equilibrium I. Force (2.1) A. force is a push or pull 1. A force is needed to change an object s state of motion 2. State of motion may be one of two things a. At rest b. Moving uniformly
Chapter 2 Mechanical Equilibrium I. Force (2.1) A. force is a push or pull 1. A force is needed to change an object s state of motion 2. State of motion may be one of two things a. At rest b. Moving uniformly
MOMENT OF A FORCE ABOUT A POINT
 MOMENT OF A FORCE ABOUT A POINT The tendency of a body to rotate about an axis passing through a specific point O when acted upon by a force (sometimes called a torque). 1 APPLICATIONS A torque or moment
MOMENT OF A FORCE ABOUT A POINT The tendency of a body to rotate about an axis passing through a specific point O when acted upon by a force (sometimes called a torque). 1 APPLICATIONS A torque or moment
(arrows denote positive direction)
") 12 Chapter 12 12.1 3-dimensional Coordinate System The 3-dimensional coordinate system we use are coordinates on R 3. The coordinate is presented as a triple of numbers: (a,b,c). In the Cartesian coordinate
12 Chapter 12 12.1 3-dimensional Coordinate System The 3-dimensional coordinate system we use are coordinates on R 3. The coordinate is presented as a triple of numbers: (a,b,c). In the Cartesian coordinate
Workbook on STATICS Department of Mechanical Engineering LINGAYA S UNIVERSITY Nachauli, Old Faridabad Jasana Road Faridabad , Haryana, India
 Workbook on STATICS Department of Mechanical Engineering LINGAYA S UNIVERSITY (Deemed to be University under Section 3 of UGC Act, 1956) Nachauli, Old Faridabad Jasana Road Faridabad 121 2, Haryana, India
Workbook on STATICS Department of Mechanical Engineering LINGAYA S UNIVERSITY (Deemed to be University under Section 3 of UGC Act, 1956) Nachauli, Old Faridabad Jasana Road Faridabad 121 2, Haryana, India
APPLIED MECHANICS I Resultant of Concurrent Forces Consider a body acted upon by co-planar forces as shown in Fig 1.1(a).
.") PPLIED MECHNICS I 1. Introduction to Mechanics Mechanics is a science that describes and predicts the conditions of rest or motion of bodies under the action of forces. It is divided into three parts 1.
PPLIED MECHNICS I 1. Introduction to Mechanics Mechanics is a science that describes and predicts the conditions of rest or motion of bodies under the action of forces. It is divided into three parts 1.
STATICS. Statics of Particles VECTOR MECHANICS FOR ENGINEERS: Eighth Edition CHAPTER. Ferdinand P. Beer E. Russell Johnston, Jr.
 Eighth E CHAPTER VECTOR MECHANICS FOR ENGINEERS: STATICS Ferdinand P. Beer E. Russell Johnston, Jr. Statics of Particles Lecture Notes: J. Walt Oler Teas Tech Universit Contents Introduction Resultant
Eighth E CHAPTER VECTOR MECHANICS FOR ENGINEERS: STATICS Ferdinand P. Beer E. Russell Johnston, Jr. Statics of Particles Lecture Notes: J. Walt Oler Teas Tech Universit Contents Introduction Resultant
6. Vectors. Given two points, P 0 = (x 0, y 0 ) and P 1 = (x 1, y 1 ), a vector can be drawn with its foot at P 0 and
 and P 1 = (x 1, y 1 ), a vector can be drawn with its foot at P 0 and") 6. Vectors For purposes of applications in calculus and physics, a vector has both a direction and a magnitude (length), and is usually represented as an arrow. The start of the arrow is the vector s foot,
6. Vectors For purposes of applications in calculus and physics, a vector has both a direction and a magnitude (length), and is usually represented as an arrow. The start of the arrow is the vector s foot,
The Cross Product. In this section, we will learn about: Cross products of vectors and their applications.
 The Cross Product In this section, we will learn about: Cross products of vectors and their applications. THE CROSS PRODUCT The cross product a x b of two vectors a and b, unlike the dot product, is a
The Cross Product In this section, we will learn about: Cross products of vectors and their applications. THE CROSS PRODUCT The cross product a x b of two vectors a and b, unlike the dot product, is a
Statics. Today Introductions Review Course Outline and Class Schedule Course Expectations Chapter 1 ENGR 1205 ENGR 1205
 Statics ENGR 1205 Kaitlin Ford kford@mtroyal.ca B175 Today Introductions Review Course Outline and Class Schedule Course Expectations Start Chapter 1 1 the goal of this course is to develop your ability
Statics ENGR 1205 Kaitlin Ford kford@mtroyal.ca B175 Today Introductions Review Course Outline and Class Schedule Course Expectations Start Chapter 1 1 the goal of this course is to develop your ability
Vectors. However, cartesian coordinates are really nothing more than a way to pinpoint an object s position in space
 Vectors Definition of Scalars and Vectors - A quantity that requires both magnitude and direction for a complete description is called a vector quantity ex) force, velocity, displacement, position vector,
Vectors Definition of Scalars and Vectors - A quantity that requires both magnitude and direction for a complete description is called a vector quantity ex) force, velocity, displacement, position vector,
Quantities which have only magnitude are called scalars. Quantities which have magnitude and direction are called vectors.
 Vectors summary Quantities which have only magnitude are called scalars. Quantities which have magnitude and direction are called vectors. AB is the position vector of B relative to A and is the vector
Vectors summary Quantities which have only magnitude are called scalars. Quantities which have magnitude and direction are called vectors. AB is the position vector of B relative to A and is the vector
Unit 1. (a) tan α = (b) tan α = (c) tan α = (d) tan α =
 tan α = (b) tan α = (c) tan α = (d) tan α =") Unit 1 1. The subjects Engineering Mechanics deals with (a) Static (b) kinematics (c) Kinetics (d) All of the above 2. If the resultant of two forces P and Q is acting at an angle α with P, then (a) tan
Unit 1 1. The subjects Engineering Mechanics deals with (a) Static (b) kinematics (c) Kinetics (d) All of the above 2. If the resultant of two forces P and Q is acting at an angle α with P, then (a) tan
Engineering Mechanics Prof. U. S. Dixit Department of Mechanical Engineering Indian Institute of Technology, Guwahati
 Engineering Mechanics Prof. U. S. Dixit Department of Mechanical Engineering Indian Institute of Technology, Guwahati Module No. - 01 Basics of Statics Lecture No. - 01 Fundamental of Engineering Mechanics
Engineering Mechanics Prof. U. S. Dixit Department of Mechanical Engineering Indian Institute of Technology, Guwahati Module No. - 01 Basics of Statics Lecture No. - 01 Fundamental of Engineering Mechanics
Brief Review of Vector Algebra
 APPENDIX Brief Review of Vector Algebra A.0 Introduction Vector algebra is used extensively in computational mechanics. The student must thus understand the concepts associated with this subject. The current
APPENDIX Brief Review of Vector Algebra A.0 Introduction Vector algebra is used extensively in computational mechanics. The student must thus understand the concepts associated with this subject. The current
Applications of Trigonometry and Vectors. Copyright 2017, 2013, 2009 Pearson Education, Inc.
 7 Applications of Trigonometry and Vectors Copyright 2017, 2013, 2009 Pearson Education, Inc. 1 7.4 Geometrically Defined Vectors and Applications Basic Terminology The Equilibrant Incline Applications
7 Applications of Trigonometry and Vectors Copyright 2017, 2013, 2009 Pearson Education, Inc. 1 7.4 Geometrically Defined Vectors and Applications Basic Terminology The Equilibrant Incline Applications
Dr. ANIL PATIL Associate Professor M.E.D., D.I.T., Dehradun
 by Dr. ANIL PATIL Associate Professor M.E.D., D.I.T., Dehradun 1 2 Mechanics The study of forces and their effect upon body under consideration Statics Deals with the forces which are acting on a body
by Dr. ANIL PATIL Associate Professor M.E.D., D.I.T., Dehradun 1 2 Mechanics The study of forces and their effect upon body under consideration Statics Deals with the forces which are acting on a body
Fundamental Electromagnetics ( Chapter 2: Vector Algebra )
") Fundamental Electromagnetics ( Chapter 2: Vector Algebra ) Prof. Kwang-Chun Ho kwangho@hansung.ac.kr Tel: 02-760-4253 Fax:02-6919-2160 1 Key Points Basic concept of scalars and vectors What is unit vector?
Fundamental Electromagnetics ( Chapter 2: Vector Algebra ) Prof. Kwang-Chun Ho kwangho@hansung.ac.kr Tel: 02-760-4253 Fax:02-6919-2160 1 Key Points Basic concept of scalars and vectors What is unit vector?
10.1 Vectors. c Kun Wang. Math 150, Fall 2017
 10.1 Vectors Definition. A vector is a quantity that has both magnitude and direction. A vector is often represented graphically as an arrow where the direction is the direction of the arrow, and the magnitude
10.1 Vectors Definition. A vector is a quantity that has both magnitude and direction. A vector is often represented graphically as an arrow where the direction is the direction of the arrow, and the magnitude
Vectors. In kinematics, the simplest concept is position, so let s begin with a position vector shown below:
 Vectors Extending the concepts of kinematics into two and three dimensions, the idea of a vector becomes very useful. By definition, a vector is a quantity with both a magnitude and a spatial direction.
Vectors Extending the concepts of kinematics into two and three dimensions, the idea of a vector becomes very useful. By definition, a vector is a quantity with both a magnitude and a spatial direction.