151H0653H00L Bio-Inspired Motor Control
|
|
|
- Edwina Hunter
- 5 years ago
- Views:
Transcription
1 Lecture H0653H00L Bio-Inspired Motor Control Fumiya Iida, Jonas Buchli Luzius Brodbeck, Derek Leach, Xiaoxiang Yu, Amir Jafari, Hugo Marques, Liyu Wang, Surya Nurzaman 11/20/2012 1
2 Lecture 10 Today Lecture: Bio-Inspired Actuators 1 Definition and Classification of Actuators 2 Why Do We Need Bio-Inspired Actuators? 3 4 Different Ways of Realizing Softness Unconventional Actuators 11/20/2012 2
3 Lecture 10 Today Lecture: Bio-Inspired Actuators 1 Definition and Classification of Actuators 2 Why Do We Need Bio-Inspired Actuators? 3 4 Different Ways of Realizing Softness Unconventional Actuators 11/20/2012 3

4 Lecture 10 Actuator Definition Actuator is system able to provide the mechanical action within a certain time Energy Source Motion converter Transducer 11/20/2012 4




5 Lecture 10 Actuator Definition Actuator is system able to provide the mechanical action within a certain time Energy Source 11/20/2012 5






6 Lecture 10 Actuator Definition Actuator is system able to provide the mechanical action within a certain time Motion converter 11/20/2012 6
7 Lecture 10 Actuator Definition Electrical Chemical high torque / low velocity Thermal Transducer Mechanical Motion Converter Nuclear low torque / high velocity Sound 11/20/2012 7
 Frequency of actuation (cycles per second, Hz) Efficiency of the transducer Bulk of the motion converter Efficiency of the motion converter Type of battery")
8 Lecture 10 Actuator Characteristics Fundamental characteristics in the evaluation of an actuator are: Force per unit of area that the transducer can give (N/m^2) Stroke that the transducer can provide with respect to its dimensions (%) Frequency of actuation (cycles per second, Hz) Efficiency of the transducer Bulk of the motion converter Efficiency of the motion converter Type of battery / energy source 11/20/2012 8
9 Lecture 10 1 Definition and Classification of Actuators 2 Why Do We Need Bio-Inspired Actuators? 3 4 Different Ways of Realizing Softness Unconventional Actuators 11/20/2012 9
10 Lecture 10 Inspiration Performances of robotic systems are still far from those characterizing animals and, in general, living systems. Major limitations are due to actuation systems, where traditional concepts have been improved through the years, without really changing core solutions. 11/20/


11 Inspiration Industrial actuators Accurate Rigid Bulky, heavy Fast Position control Unsafe DLR 11/20/
12 Inspiration How can we control the robot s behavior in an unknown environment?! 11/20/
13 Lecture 10 Soft Actuators The specifications of Nature's designs consist of general features rather than making exact duplicates Shape Functionality Performance 11/20/
14 Lecture 10 1 Definition and Classification of Actuators 2 Why Do We Need Bio-Inspired Actuators? 3 4 Different Ways of Realizing Softness Unconventional Actuators 11/20/

15 Different Ways of Realizing Softness Covering robot with soft and compliant material Adding large inertia to the system Cooling the electronics Affecting maneuverability of the robot Humanoid robot Macra 11/20/

16 Different Ways of Realizing Softness (active compliance) Sense the force Facilitate the robot with force/torque sensors and feedback control to detect collisions and avoid them DLR 11/20/
17 Different Ways of Realizing Softness (active compliance) Calculate the force Alessandro De Luca and Raffaella Mattone. 2005, Sensorless Robot Collision Detection and Hybrid Force/Motion Control, IEEE International Conference on Robotics and Automation 11/20/
18 Different Ways of Realizing Softness (passive compliance) Traditional actuators Motor GB Link I r N 2 +I l : apparent Inertia 11/20/
 Motor GB Link Robust Perturbations and uncertainties")
19 Different Ways of Realizing Softness (passive compliance) Series Elastic Actuator (SEA) Motor GB Link Robust Perturbations and uncertainties 11/20/


20 Different Ways of Realizing Softness Compliant Humanoid: CoMan Li Zhibin and Nikos Tsagarakis from Italian Institute of Technology 11/20/
21 Different Ways of Realizing Softness (passive compliance) Series Elastic Actuator (SEA) x l Motor GB Link Energy 11/20/
")

22 Different Ways of Realizing Softness (passive compliance) Series Elastic Actuator (SEA) Motor GB Link Motor GB Link 11/20/
23 Varaible Compliance Why do we need variable compliance actuators?! 11/20/
24 Lecture 10 11/20/

25 Variable Stiffness Actuators Safety and Performance Giovanni Tonietti et al. 2003, Design and Control of a Variable Stiffness Actuator for Safe and Fast Physical Human/Robot Interaction, IEEE International Conference on Robotics and Automation 11/20/

26 Variable Stiffness Actuators Minimizing Energy Consumption Motor GB 11/20/


27 Variable Stiffness Actuators Maximizing output power Motor GB Link Motor GB Link Motor GB Link 11/20/

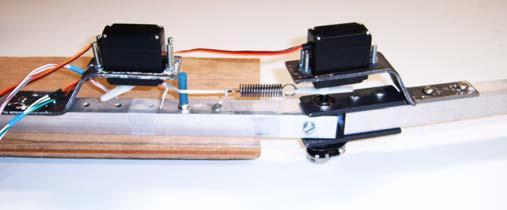
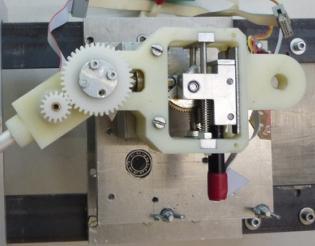
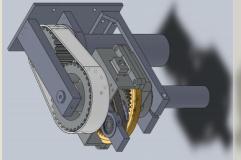
28 HDAU Korea University 11/20/
29 Variable Stiffness Actuators Motor Motor GB GB Link Two actuation units Stiffness adjusting mechanism 11/20/



















30 Variable Stiffness Actuators Mot Actuation GB Mot or Units GB or Link 11/20/
 [Hurst et al. 2010] Plated Pneumatic Artificial Muscles (PPAM) [Darden, et al.")
![1999] Antagonistic C2: Cross coupled Variable Stiffness Actuator (VSA) [Tonietti et al. 2005] C3: Bidirectional Variable Stiffness Actuator-II (VSA-II) [Schiavi et al. 2008] VSA-HD [Castalano et al.](/docs-images/81/84079065/images/31-1.jpg "2010] VSA-CUBE [castalano et al. 2011] Bidirectional Antagonism with Variable Stiffness (BAVS) [Petit et al. 2010] Floating Spring Joint (FSJ)[Wolf et al.")
31 Variable Stiffness Actuators Approaches Classes Table 1. Classification of different VSAs Examples Schemes C1: Simple antagonistic Biologically inspired joint stiffness control [Migliore et al.2005] Actuator with Mechanically Adjustable Series Compliance (AMASC) [Hurst et al. 2010] Plated Pneumatic Artificial Muscles (PPAM) [Darden, et al. 1999] Antagonistic C2: Cross coupled Variable Stiffness Actuator (VSA) [Tonietti et al. 2005] C3: Bidirectional Variable Stiffness Actuator-II (VSA-II) [Schiavi et al. 2008] VSA-HD [Castalano et al. 2010] VSA-CUBE [castalano et al. 2011] Bidirectional Antagonism with Variable Stiffness (BAVS) [Petit et al. 2010] Floating Spring Joint (FSJ)[Wolf et al. 2011] Quasi-Antagonistic joint (QA-joint)[Eiberger et al. 2010] C4: Changing the spring's deflection Mechanically Adjustable and Controllable Compliance Equilibrium Position Actuator (MACCEPA) [Van Ham et al. 2006] and (MACCEPA 2.0) [vanderborght et al. 2011] Varaible Stiffness Joint (VS-joint) [Wolf et al. 2008] Safe Joint Mechanism (SJM I) [Park et al. 2010] and (SJM II) [Park et al. 2011] Series C5: Changing the lever ratio Actuator with Adjustable Stiffness (AwAS-I) [Jafari et al. 2010] and (AwAS-II) [Jafari et al. 2012] Compact Variable Stiffness Actuator (ComPact-VSA) [Tsagarakis et al. 2011] Energy Efficient Variable Stiffness Actuator [Visser et al. 2011] Variable Stiffness Actuator University of Twente [Carloni et al. 2012] Hybrid Dual Actuation Unit (HDAU) [Park et al. 2011] C6: Changing the transmission angle Mechanism for Varying Stiffness via Changing Transmission Angle (MESTRAN) [Quy et al. 2011] C7: Changing the inertia Structure Controlled Stiffness (SCS) [Sugar et al. 2004] 11/20/2012

32 Bio-Inspired Approach Two muscles actuate one joint Force to deflection profile is nonlinear Muscles are unidirectional actuators Position and stiffness can be controlled independently 11/20/
33 Penumatic Artificial Muscles (PAM) as artificial muscles



34 Plated Pneumatic Artificial Muscles (PPAM) Vrije Universiteit Brussel Daerden, et al.(2001) 11/20/


35 Plated Pneumatic Artificial Muscles (PPAM) Vrije Universiteit Brussel Stiff Soft 11/20/
 Vrije Universiteit Brussel")
 Vrije Universiteit Brussel")
36 Plated Pneumatic Artificial Muscles (PPAM) Vrije Universiteit Brussel Biped Lucy: Vanderborght, et al.(2006) Vrije Universiteit Brussel 11/20/

37 Introduction What is Pneumatic Artificial Muscle PAM: A contractile and linear motion engine operated by gas pressure [Daerden and Lefeben, 2000]

38 Introduction The Operation Principle (1) Operation at constant load M is constant p=0 < p 1 < p 2 V min < V 1 < V 2 l max > l 1 > l 2 [Kelasidi et al. 2012, Daerden and Lefeben 2000]

39 Introduction The Operation Principle (2) Operation at constant pressure p is constant M 1 > M 2 V 1 < V 2 < V max l 1 > l 2 > l max [Kelasidi et al. 2012, Daerden and Lefeben 2000]

40 Introduction Why PAM? PAM enables a resemblance of skeletal muscle system: - Lightweight and strong - Direct connection - Ready replacement [Daerden and Lefeben 2000, Yamada et al. 2011]
41 General Properties Similarities with biological muscles (1) 1. Force versus Length relationship* F = muscle load L = length instantaneous value: m value at the resting length: m,o [Klute et al. 1999]
42 General Properties Similarities with biological muscles (2) 2. Compliance characteristic C = compliance, K = stiffness 3. Antagonist characteristic [Daerden and Lefeben 2000]
43 General Properties Differences with biological muscles (1) 1. Force versus Velocity relationship F = muscle load V = velocity of contraction instantaneous value: m value at the resting length: m,o [Klute et al. 1999]
44 General Properties Differences with biological muscles (2) 2. Biological muscles: - do not change volume during contraction - in fact have a modular structure - have integrated force and strain sensors - have energy stored in them - comestible [Daerden and Lefeben 2000]




45 McKibben PAM Different Type of PAMs Braided PAM Pleated PAM Netted PAM Embedded PAM [Kelasidi et al. 2012, Daerden and Lefeben 2000]
46 McKibben PAM Model of McKibben PAM F = muscle load p = pressure D max = muscle's diameter at θ=90 ε = contraction l = muscle length value at resting: o [Daerden and Lefeben 2000]


47 Applications Human like robot Exoskeleton
48 Lecture 10 1 Definition and Classification of Actuators 2 Why Do We Need Bio-Inspired Actuators? 3 4 Different Ways of Realizing Softness Unconventional Actuators 11/20/
49 Electroactive polymers (EAPs) as artificial muscles
50 Why do EAPs resemble muscles? Full & Meijer (2004) in Bar-Cohen (ed.) Electroactive Polymer Actuators as Artificial Muscles, ch. 3

51 Armwrestling Match of EAP Robotic Arm Against Human (2005) Environmental Robots Incorporated USA EMPA Switzerland Virginia Tech USA

52 EAPs as actuators in robots

53 EAPs as actuators in robots

54 EAPs as actuators in robots
55 A list of major EAP materials Electrorheological fluids (ERF) Bar-Cohen (2004) in Electrochemistry Encyclopedia: Samatham et al. (2007) in Kim & Tadokoro (ed.) Electroactive Polymers for Robotic Applications, ch. 1
56 A list of major EAP materials Electrorheological fluids (ERF) Bar-Cohen (2004) in Electrochemistry Encyclopedia: Samatham et al. (2007) in Kim & Tadokoro (ed.) Electroactive Polymers for Robotic Applications, ch. 1
 at ETH Robotics Summer School on Soft")
57 Dielectric elastomers (DEs) Dielectric elastomers are essentially elastic parallel-plate capacitors Electrostatic forces generate significant actuation strains and high energy densities Changes in resistance and capacitance can be using to self-sense Slide adapted from Conn (2012) at ETH Robotics Summer School on Soft Robotics
 at ETH Robotics Summer School on Soft")
58 Dielectric elastomers (DEs) Slide modified from Conn (2012) at ETH Robotics Summer School on Soft Robotics
 in Bar-Cohen (ed.")
59 DE actuator configurations Kornbluh et al. (2004) in Bar-Cohen (ed.) Electroactive Polymer Actuators as Artificial Muscles, ch. 16
60 A list of major EAP materials Electrorheological fluids (ERF) Bar-Cohen (2004) in Electrochemistry Encyclopedia: Samatham et al. (2007) in Kim & Tadokoro (ed.) Electroactive Polymers for Robotic Applications, ch. 1


61 Ionic polymer-metal composites IPMCs consist of a polymer membrane coated with flexible gold electrodes. The polymer membrane provides channels for mobility of positive ions in a fixed network of negative ions. When a voltage is applied the IPMC bends in response to internal ion migration. The polymer membrane needs to be hydrated for operation. Voltage OFF Uniform cation distribution Voltage ON Cation migration Slide adapted from Conn (2012) at ETH Robotics Summer School on Soft Robotics
 at ETH Robotics Summer School on Soft")
62 Ionic polymer-metal composites Slide modified from Conn (2012) at ETH Robotics Summer School on Soft Robotics
63 Potential applications Bio-inspired robots Biomedical devices Haptic interfaces Kornbluh et al. (2004) in Bar-Cohen (ed.) Electroactive Polymer Actuators as Artificial Muscles, ch. 16


64 Shape Memory Alloys

65 Lecture 10 11/20/
66 Shape-memory alloy (SMA) A material that can remember its shape A class of smart materials SMA also exhibits superelastic (pseudoelastic) behavior


67 STRESS Shape Memory Effect: Shape Recovery Under Stress Detwinned Martensite (stressed) Austenite M f M s A s A f TEMPERATURE


68 SMA Demonstrations and Applications Floral Arrangement SMA Actuated Butterfly: SMA Linear Actuator Thermobile Demonstrator: SMA Properties/Thermodynamics
69 Lecture 10 Do you want to make your own soft robot/actuator? 11/20/
Coupling between the Output Force and Stiffness in Different Variable Stiffness Actuators
 Actuators 014, 3, 70-84; doi:10.3390/act303070 Article OPEN ACCESS actuators ISSN 076-085 www.mdpi.com/journal/actuators Coupling between the Output Force and Stiffness in Different Variable Stiffness
Actuators 014, 3, 70-84; doi:10.3390/act303070 Article OPEN ACCESS actuators ISSN 076-085 www.mdpi.com/journal/actuators Coupling between the Output Force and Stiffness in Different Variable Stiffness
EAP - ElectroActive Polymers
 A Short Introduction to Robotics Applications AIRLab - Artificial Intelligence and Robotics Lab Politecnico di Milano http://www.airlab.elet.polimi.it/ February 2007 Introduction to EAP Focus: Emulate
A Short Introduction to Robotics Applications AIRLab - Artificial Intelligence and Robotics Lab Politecnico di Milano http://www.airlab.elet.polimi.it/ February 2007 Introduction to EAP Focus: Emulate
ARTISAN ( ) ARTISAN ( ) Human-Friendly Robot Design
 ARTISAN ( ) Human-Friendly Robot Design") Human-Friendly Robot Design Torque Control: a basic capability dynamic performance compliance, force control safety, interactivity manipulation cooperation ARTISAN (1990-95) ARTISAN (1990-95) 1 intelligence
Human-Friendly Robot Design Torque Control: a basic capability dynamic performance compliance, force control safety, interactivity manipulation cooperation ARTISAN (1990-95) ARTISAN (1990-95) 1 intelligence
Design and Control of Compliant Humanoids. Alin Albu-Schäffer. DLR German Aerospace Center Institute of Robotics and Mechatronics
 Design and Control of Compliant Humanoids Alin Albu-Schäffer DLR German Aerospace Center Institute of Robotics and Mechatronics Torque Controlled Light-weight Robots Torque sensing in each joint Mature
Design and Control of Compliant Humanoids Alin Albu-Schäffer DLR German Aerospace Center Institute of Robotics and Mechatronics Torque Controlled Light-weight Robots Torque sensing in each joint Mature
Pleated Pneumatic Artificial Muscles: Compliant Robotic Actuators
 Pleated Pneumatic Artificial Muscles: Compliant Robotic Actuators Frank DAERDEN, Dirk LEFEBER, Björn VERRELST, Ronald VAN HAM VRIJE UNIVERSITEIT BRUSSEL Department of Mechanical Engineering / Multibody
Pleated Pneumatic Artificial Muscles: Compliant Robotic Actuators Frank DAERDEN, Dirk LEFEBER, Björn VERRELST, Ronald VAN HAM VRIJE UNIVERSITEIT BRUSSEL Department of Mechanical Engineering / Multibody
Active elastomer components based on dielectric elastomers
 Gummi Fasern Kunststoffe, 68, No. 6, 2015, pp. 412 415 Active elastomer components based on dielectric elastomers W. Kaal and S. Herold Fraunhofer Institute for Structural Durability and System Reliability
Gummi Fasern Kunststoffe, 68, No. 6, 2015, pp. 412 415 Active elastomer components based on dielectric elastomers W. Kaal and S. Herold Fraunhofer Institute for Structural Durability and System Reliability
Stiffness estimation for flexible transmissions
 SICURA@SIDRA 2010 13 Settembre L Aquila Stiffness estimation for flexible transmissions Fabrizio Flacco Alessandro De Luca Dipartimento di Informatica e Sistemistica Motivation Why we need to know the
SICURA@SIDRA 2010 13 Settembre L Aquila Stiffness estimation for flexible transmissions Fabrizio Flacco Alessandro De Luca Dipartimento di Informatica e Sistemistica Motivation Why we need to know the
Safe Joint Mechanism using Inclined Link with Springs for Collision Safety and Positioning Accuracy of a Robot Arm
 1 IEEE International Conference on Robotics and Automation Anchorage Convention District May 3-8, 1, Anchorage, Alaska, USA Safe Joint Mechanism using Inclined Link with Springs for Collision Safety and
1 IEEE International Conference on Robotics and Automation Anchorage Convention District May 3-8, 1, Anchorage, Alaska, USA Safe Joint Mechanism using Inclined Link with Springs for Collision Safety and
Smart Polymer Material as Artificial Muscle Actuator
 Smart Polymer Material as Artificial Muscle Actuator Yusuf Wibisono Advanced Materials Science and Engineering Actuator Motion-generating device A mechanical device for moving or controlling a mechanism
Smart Polymer Material as Artificial Muscle Actuator Yusuf Wibisono Advanced Materials Science and Engineering Actuator Motion-generating device A mechanical device for moving or controlling a mechanism
Pleated pneumatic artificial muscles: actuators for automation and robotics
 Pleated pneumatic artificial muscles: actuators for automation and robotics Frank Daerden, Dirk Lefeber, Björn Verrelst, Ronald Van Ham Vrije Universiteit Brussel Department of Mechanical Engineering /
Pleated pneumatic artificial muscles: actuators for automation and robotics Frank Daerden, Dirk Lefeber, Björn Verrelst, Ronald Van Ham Vrije Universiteit Brussel Department of Mechanical Engineering /
A Simplified Variable Admittance Controller Based on a Virtual Agonist-Antagonist Mechanism for Robot Joint Control
 1 A Simplified Variable Admittance Controller Based on a Virtual Agonist-Antagonist Mechanism for Robot Joint Control Xiaofeng Xiong, Florentin Wörgötter and Poramate Manoonpong the Bernstein Center for
1 A Simplified Variable Admittance Controller Based on a Virtual Agonist-Antagonist Mechanism for Robot Joint Control Xiaofeng Xiong, Florentin Wörgötter and Poramate Manoonpong the Bernstein Center for
Modeling Hysteresis in Pleated Pneumatic Artificial Muscles
 Modeling Hysteresis in Pleated Pneumatic Artificial Muscles M. Van Damme, P. Beyl, B. Vanderborght, R. Van Ham, I. Vanderniepen, R. Versluys, F. Daerden, D. Lefeber Robotics & Multibody Mechanics Research
Modeling Hysteresis in Pleated Pneumatic Artificial Muscles M. Van Damme, P. Beyl, B. Vanderborght, R. Van Ham, I. Vanderniepen, R. Versluys, F. Daerden, D. Lefeber Robotics & Multibody Mechanics Research
Variable Stiffness Actuators: the user s point of view.
 1 Variable Stiffness Actuators: the user s point of view. Giorgio Grioli, Sebastian Wolf, Manolo Garabini, Manuel Catalano, Etienne Burdet, Darwin Caldwell, Raffaella Carloni, Werner Friedl, Markus Grebenstein,
1 Variable Stiffness Actuators: the user s point of view. Giorgio Grioli, Sebastian Wolf, Manolo Garabini, Manuel Catalano, Etienne Burdet, Darwin Caldwell, Raffaella Carloni, Werner Friedl, Markus Grebenstein,
Biped Walking of Passive Dynamic Walker with IPMC Linear Actuator
 Biped Walking of Passive Dynamic Walker with IPMC Linear Actuator N. Kamamichi 1,Y.Kaneda 1, M. Yamakita 1,3,K.Asaka 2,3 and Z. W. Luo 3 1 Tokyo Institute of Technology, 2-12-1 Meguro-ku Oh-okayama Tokyo,
Biped Walking of Passive Dynamic Walker with IPMC Linear Actuator N. Kamamichi 1,Y.Kaneda 1, M. Yamakita 1,3,K.Asaka 2,3 and Z. W. Luo 3 1 Tokyo Institute of Technology, 2-12-1 Meguro-ku Oh-okayama Tokyo,
Variable Radius Pulley Design Methodology for Pneumatic Artificial Muscle-based Antagonistic Actuation Systems
 211 IEEE/RSJ International Conference on Intelligent Robots and Systems September 25-3, 211. San Francisco, CA, USA Variable Radius Pulley Design Methodology for Pneumatic Artificial Muscle-based Antagonistic
211 IEEE/RSJ International Conference on Intelligent Robots and Systems September 25-3, 211. San Francisco, CA, USA Variable Radius Pulley Design Methodology for Pneumatic Artificial Muscle-based Antagonistic
Modelling and Control of Variable Stiffness Actuated Robots
 Modelling and Control of Variable Stiffness Actuated Robots Sabira Jamaludheen 1, Roshin R 2 P.G. Student, Department of Electrical and Electronics Engineering, MES College of Engineering, Kuttippuram,
Modelling and Control of Variable Stiffness Actuated Robots Sabira Jamaludheen 1, Roshin R 2 P.G. Student, Department of Electrical and Electronics Engineering, MES College of Engineering, Kuttippuram,
Electro-statically stricted polymers (ESSP)
") Proceedings of SPIE's 61h Annual International Symposium on Smart Structures and Materials, 1-5 March, 1999, Newport CA. Beach, No. 3669-41 SPIE Copyright 0 1999 Electro-statically stricted polymers (ESSP)
Proceedings of SPIE's 61h Annual International Symposium on Smart Structures and Materials, 1-5 March, 1999, Newport CA. Beach, No. 3669-41 SPIE Copyright 0 1999 Electro-statically stricted polymers (ESSP)
Conception and Evaluation of a Novel Variable Torsion Stiffness for Biomechanical Applications
 The Fourth IEEE RAS/EMBS International Conference on Biomedical Robotics and Biomechatronics Roma, Italy. June 24-27, 2012 Conception and Evaluation of a Novel Variable Torsion Stiffness for Biomechanical
The Fourth IEEE RAS/EMBS International Conference on Biomedical Robotics and Biomechatronics Roma, Italy. June 24-27, 2012 Conception and Evaluation of a Novel Variable Torsion Stiffness for Biomechanical
IMPROVING FORCE CONTROL THROUGH END- EFFECTOR VIBRATION REDUCTION AND VARIABLE STIFFNESS JOINT DESIGN LI RENJUN NATIONAL UNIVERSITY OF SINGAPORE
 IMPROVING FORCE CONTROL THROUGH END- EFFECTOR VIBRATION REDUCTION AND VARIABLE STIFFNESS JOINT DESIGN LI RENJUN NATIONAL UNIVERSITY OF SINGAPORE 2014 IMPROVING FORCE CONTROL THROUGH END- EFFECTOR VIBRATION
IMPROVING FORCE CONTROL THROUGH END- EFFECTOR VIBRATION REDUCTION AND VARIABLE STIFFNESS JOINT DESIGN LI RENJUN NATIONAL UNIVERSITY OF SINGAPORE 2014 IMPROVING FORCE CONTROL THROUGH END- EFFECTOR VIBRATION
MATLAB MODELS FOR PNEUMATIC ARTIFICIAL MUSCLES
 1 Tamás Szépe 2 József Sárosi MATLAB MODELS FOR PNEUMATIC ARTIFICIAL MUSCLES Keywords: pneumatic artificial muscle, geometric model, force, Matlab 1 Department of Computer Algorithms and Artificial Intelligence,
1 Tamás Szépe 2 József Sárosi MATLAB MODELS FOR PNEUMATIC ARTIFICIAL MUSCLES Keywords: pneumatic artificial muscle, geometric model, force, Matlab 1 Department of Computer Algorithms and Artificial Intelligence,
A COMPLETE STUDY OF ELECTROACTIVE POLYMERS FOR ENERGY SCAVENGING: MODELLING AND EXPERIMENTS
 Stresa, Italy, 5-7 pril 007 OMPLETE STUDY OF ELETROTIVE POLYMERS FOR ENERGY SVENGING: MODELLING ND EXPERIMENTS. Jean-Mistral 1, S. asrour, J.J. haillout 1 and. onvilain 1 E-LETI. 17 rue des Martyrs, 805
Stresa, Italy, 5-7 pril 007 OMPLETE STUDY OF ELETROTIVE POLYMERS FOR ENERGY SVENGING: MODELLING ND EXPERIMENTS. Jean-Mistral 1, S. asrour, J.J. haillout 1 and. onvilain 1 E-LETI. 17 rue des Martyrs, 805
A Novel Variable Stiffness Mechanism Capable of an Infinite Stiffness Range and Unlimited Decoupled Output Motion
 Actuators 204, 3, 07-23; doi:0.3390/act302007 OPEN ACCESS actuators ISSN 2076-0825 www.mdpi.com/journal/actuators Article A Novel Variable Stiffness Mechanism Capable of an Infinite Stiffness Range and
Actuators 204, 3, 07-23; doi:0.3390/act302007 OPEN ACCESS actuators ISSN 2076-0825 www.mdpi.com/journal/actuators Article A Novel Variable Stiffness Mechanism Capable of an Infinite Stiffness Range and
Ion Concentration and Electromechanical Actuation Simulations of Ionic Polymer-Metal Composites
 October 5-7, 2016, Boston, Massachusetts, USA Ion Concentration and Electromechanical Actuation Simulations of Ionic Polymer-Metal Composites Tyler Stalbaum, Qi Shen, and Kwang J. Kim Active Materials
October 5-7, 2016, Boston, Massachusetts, USA Ion Concentration and Electromechanical Actuation Simulations of Ionic Polymer-Metal Composites Tyler Stalbaum, Qi Shen, and Kwang J. Kim Active Materials
Design of Dielectric Electroactive Polymers for a Compact and Scalable Variable Stiffness Device
 Design of Dielectric Electroactive Polymers for a Compact and Scalable Variable Stiffness Device Sanjay Dastoor and Mark Cutkosky Abstract We present the design, analysis, and experimental validation of
Design of Dielectric Electroactive Polymers for a Compact and Scalable Variable Stiffness Device Sanjay Dastoor and Mark Cutkosky Abstract We present the design, analysis, and experimental validation of
Mechanism Design for Variable Stiffness Actuation based on Enumeration and Analysis of Performance
 2010 IEEE International Conference on Robotics and Automation Anchorage Convention District May 3-8, 2010, Anchorage, Alaska, USA Mechanism Design for Variable Stiffness Actuation based on Enumeration
2010 IEEE International Conference on Robotics and Automation Anchorage Convention District May 3-8, 2010, Anchorage, Alaska, USA Mechanism Design for Variable Stiffness Actuation based on Enumeration
COMPLIANT CONTROL FOR PHYSICAL HUMAN-ROBOT INTERACTION
 COMPLIANT CONTROL FOR PHYSICAL HUMAN-ROBOT INTERACTION Andrea Calanca Paolo Fiorini Invited Speakers Nevio Luigi Tagliamonte Fabrizio Sergi 18/07/2014 Andrea Calanca - Altair Lab 2 In this tutorial Review
COMPLIANT CONTROL FOR PHYSICAL HUMAN-ROBOT INTERACTION Andrea Calanca Paolo Fiorini Invited Speakers Nevio Luigi Tagliamonte Fabrizio Sergi 18/07/2014 Andrea Calanca - Altair Lab 2 In this tutorial Review
Analysis of Torque Capacities in Hybrid Actuation for Human-Friendly Robot Design
 1 IEEE International Conference on Robotics and Automation Anchorage Convention District May 3-8, 1, Anchorage, Alaska, USA Analysis of Torque Capacities in Hybrid Actuation for Human-Friendly Robot Design
1 IEEE International Conference on Robotics and Automation Anchorage Convention District May 3-8, 1, Anchorage, Alaska, USA Analysis of Torque Capacities in Hybrid Actuation for Human-Friendly Robot Design
Safety Properties and Collision Behavior of Robotic Arms with Elastic Tendon Actuation
 German Conference on Robotics (ROBOTIK ), Springer, Safety Properties and Collision Behavior of Robotic Arms with Elastic Tendon Actuation Thomas Lens, Oskar von Stryk Simulation, Optimization and Robotics
German Conference on Robotics (ROBOTIK ), Springer, Safety Properties and Collision Behavior of Robotic Arms with Elastic Tendon Actuation Thomas Lens, Oskar von Stryk Simulation, Optimization and Robotics
Soft Actuation in Cyclic Motions: Stiffness Profile Optimization for Energy Efficiency
 Soft Actuation in Cyclic Motions: Stiffness Profile Optimization for Energy Efficiency Alexandra Velasco, Manolo Garabini, Manuel G. Catalano and Antonio Bicchi Abstract In this paper, we investigate the
Soft Actuation in Cyclic Motions: Stiffness Profile Optimization for Energy Efficiency Alexandra Velasco, Manolo Garabini, Manuel G. Catalano and Antonio Bicchi Abstract In this paper, we investigate the
A REVIEW ON DIELECTRIC ELASTOMER AND ITS APPLICATION
 A REVIEW ON DIELECTRIC ELASTOMER AND ITS APPLICATION 1 2 Anjani Kumar Singh, O. P. Thakur 1 Bharati Vidyapeeth College of Engineering, New Delhi 2 Netaji Subhas Institute of Technology, University of Delhi
A REVIEW ON DIELECTRIC ELASTOMER AND ITS APPLICATION 1 2 Anjani Kumar Singh, O. P. Thakur 1 Bharati Vidyapeeth College of Engineering, New Delhi 2 Netaji Subhas Institute of Technology, University of Delhi
Bacillus spores as building blocks for stimuliresponsive materials and nanogenerators
 Bacillus spores as building blocks for stimuliresponsive materials and nanogenerators Xi Chen, L Mahadevan, Adam Driks & Ozgur Sahin 1- Estimation of energy densities from the AFM based measurements Supplementary
Bacillus spores as building blocks for stimuliresponsive materials and nanogenerators Xi Chen, L Mahadevan, Adam Driks & Ozgur Sahin 1- Estimation of energy densities from the AFM based measurements Supplementary
The Next Challenges in Bio-Inspired Robotics! Fumiya Iida! Bio-Inspired Robotics Lab! Institute of Robotics and Intelligent Systems! ETH Zurich!
 The Next Challenges in Bio-Inspired Robotics! Fumiya Iida! Bio-Inspired Robotics Lab! Institute of Robotics and Intelligent Systems! ETH Zurich! Robot vs. Animal The Principle of Self-Organization Three
The Next Challenges in Bio-Inspired Robotics! Fumiya Iida! Bio-Inspired Robotics Lab! Institute of Robotics and Intelligent Systems! ETH Zurich! Robot vs. Animal The Principle of Self-Organization Three
Phys498BIO; Prof. Paul Selvin Hw #9 Assigned Wed. 4/18/12: Due 4/25/08
 1. Ionic Movements Across a Permeable Membrane: The Nernst Potential. In class we showed that if a non-permeable membrane separates a solution with high [KCl] from a solution with low [KCl], the net charge
1. Ionic Movements Across a Permeable Membrane: The Nernst Potential. In class we showed that if a non-permeable membrane separates a solution with high [KCl] from a solution with low [KCl], the net charge
The Effect of Viscosity and Ion Size Copley, Hubbard, Maisano on the Transduction of Ionic. Polymer Metal Composite
 The Effect of Viscosity and Ion Size Copley, Hubbard, Maisano on the Transduction of Ionic Keywords ionic polymer metal Polymer Metal Composite composite (IPMC), actuators, ionic liquids, Actuators viscosity
The Effect of Viscosity and Ion Size Copley, Hubbard, Maisano on the Transduction of Ionic Keywords ionic polymer metal Polymer Metal Composite composite (IPMC), actuators, ionic liquids, Actuators viscosity
Instantaneous Stiffness Effects on Impact Forces in Human-Friendly Robots
 IEEE/RSJ International Conference on Intelligent Robots and Systems September -3,. San Francisco, CA, USA Instantaneous Stiffness Effects on Impact Forces in Human-Friendly Robots Dongjun Shin, Zhan Fan
IEEE/RSJ International Conference on Intelligent Robots and Systems September -3,. San Francisco, CA, USA Instantaneous Stiffness Effects on Impact Forces in Human-Friendly Robots Dongjun Shin, Zhan Fan
An Accurate Model for Pull-in Voltage of Circular Diaphragm Capacitive Micromachined Ultrasonic Transducers (CMUT)
") An Accurate Model for Pull-in Voltage of Circular Diaphragm Capacitive Micromachined Ultrasonic Transducers (CMUT) Mosaddequr Rahman, Sazzadur Chowdhury Department of Electrical and Computer Engineering
An Accurate Model for Pull-in Voltage of Circular Diaphragm Capacitive Micromachined Ultrasonic Transducers (CMUT) Mosaddequr Rahman, Sazzadur Chowdhury Department of Electrical and Computer Engineering
Enhanced IPMC actuation by thermal cycling
 Enhanced IPMC actuation by thermal cycling Jonathan Rossiter a*, Kazuto Takashima b Toshiharu Mukai c a Department of Engineering Mathematics, University of Bristol, Woodland Road, Bristol BS8 1UB, UK;
Enhanced IPMC actuation by thermal cycling Jonathan Rossiter a*, Kazuto Takashima b Toshiharu Mukai c a Department of Engineering Mathematics, University of Bristol, Woodland Road, Bristol BS8 1UB, UK;
1 Force Sensing. Lecture Notes. 1.1 Load Cell. 1.2 Stress and Strain
 Lecture Notes 1 Force Sensing 1.1 Load Cell A Load Cell is a structure which supports the load and deflects a known amount in response to applied forces and torques. The deflections are measured to characterize
Lecture Notes 1 Force Sensing 1.1 Load Cell A Load Cell is a structure which supports the load and deflects a known amount in response to applied forces and torques. The deflections are measured to characterize
IROS 16 Workshop: The Mechatronics behind Force/Torque Controlled Robot Actuation Secrets & Challenges
 Arne Wahrburg (*), 2016-10-14 Cartesian Contact Force and Torque Estimation for Redundant Manipulators IROS 16 Workshop: The Mechatronics behind Force/Torque Controlled Robot Actuation Secrets & Challenges
Arne Wahrburg (*), 2016-10-14 Cartesian Contact Force and Torque Estimation for Redundant Manipulators IROS 16 Workshop: The Mechatronics behind Force/Torque Controlled Robot Actuation Secrets & Challenges
MUSCLE-LIKE ACTUATORS? A COMPARISON BETWEEN THREE ELECTROACTIVE POLYMERS.
 MUSCLE-LIKE ACTUATORS? A COMPARISON BETWEEN THREE ELECTROACTIVE POLYMERS. Kenneth Meijer*, Marcus Rosenthal and Robert J Full Dept. Integrative Biology, University of California at Berkeley. ABSTRACT Muscles
MUSCLE-LIKE ACTUATORS? A COMPARISON BETWEEN THREE ELECTROACTIVE POLYMERS. Kenneth Meijer*, Marcus Rosenthal and Robert J Full Dept. Integrative Biology, University of California at Berkeley. ABSTRACT Muscles
ARTIFICIAL MUSCLES: STATE OF THE ART AND A NEW TECHNOLOGY
 ARTIFICIAL MUSCLES: STATE OF THE ART AND A NEW TECHNOLOGY PETR KOCIS, RADEK KNOFLICEK Brno University of Technology, Faculty of Mechanical Engineering, Institute of Producing Machines, Systems and Robotics,
ARTIFICIAL MUSCLES: STATE OF THE ART AND A NEW TECHNOLOGY PETR KOCIS, RADEK KNOFLICEK Brno University of Technology, Faculty of Mechanical Engineering, Institute of Producing Machines, Systems and Robotics,
Outline. 4 Mechanical Sensors Introduction General Mechanical properties Piezoresistivity Piezoresistive Sensors Capacitive sensors Applications
 Sensor devices Outline 4 Mechanical Sensors Introduction General Mechanical properties Piezoresistivity Piezoresistive Sensors Capacitive sensors Applications Introduction Two Major classes of mechanical
Sensor devices Outline 4 Mechanical Sensors Introduction General Mechanical properties Piezoresistivity Piezoresistive Sensors Capacitive sensors Applications Introduction Two Major classes of mechanical
International Journal of Engineering Science
 International Journal of Engineering Science 8 (1) 188 198 Contents lists available at ScienceDirect International Journal of Engineering Science journal homepage: www.elsevier.com/locate/ijengsci Study
International Journal of Engineering Science 8 (1) 188 198 Contents lists available at ScienceDirect International Journal of Engineering Science journal homepage: www.elsevier.com/locate/ijengsci Study
Modeling of Hysteresis Effect of SMA using Neuro Fuzzy Inference System
 54th AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conference April 8-11, 2013, Boston, Massachusetts AIAA 2013-1918 Modeling of Hysteresis Effect of SMA using Neuro Fuzzy Inference
54th AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conference April 8-11, 2013, Boston, Massachusetts AIAA 2013-1918 Modeling of Hysteresis Effect of SMA using Neuro Fuzzy Inference
Mathematical Model for Pressure-Deformation Relationship of Miniaturized McKibben Actuators. {ashwinkp,
 Mathematical Model for Pressure-Deformation Relationship of Miniaturized McKibben Actuators Ashwin K.P 1 and Ashitava Ghosal 1 1 Indian Institute of Science, Bangalore Email: {ashwinkp, asitava}@iisc.ac.in
Mathematical Model for Pressure-Deformation Relationship of Miniaturized McKibben Actuators Ashwin K.P 1 and Ashitava Ghosal 1 1 Indian Institute of Science, Bangalore Email: {ashwinkp, asitava}@iisc.ac.in
A MOTORIZED GRAVITY COMPENSATION MECHANISM USED FOR THE NECK OF A SOCIAL ROBOT
 A MOTORIZED GRAVITY COMPENSATION MECHANISM USED FOR THE NECK OF A SOCIAL ROBOT Florentina Adascalitei 1, Ioan Doroftei 1, Ovidiu Crivoi 1, Bram Vanderborght, Dirk Lefeber 1 "Gh. Asachi" Technical University
A MOTORIZED GRAVITY COMPENSATION MECHANISM USED FOR THE NECK OF A SOCIAL ROBOT Florentina Adascalitei 1, Ioan Doroftei 1, Ovidiu Crivoi 1, Bram Vanderborght, Dirk Lefeber 1 "Gh. Asachi" Technical University
Transduction Based on Changes in the Energy Stored in an Electrical Field. Lecture 6-5. Department of Mechanical Engineering
 Transduction Based on Changes in the Energy Stored in an Electrical Field Lecture 6-5 Transducers with cylindrical Geometry For a cylinder of radius r centered inside a shell with with an inner radius
Transduction Based on Changes in the Energy Stored in an Electrical Field Lecture 6-5 Transducers with cylindrical Geometry For a cylinder of radius r centered inside a shell with with an inner radius
Power-optimized Stiffness and Nonlinear Position Control of an Actuator with Variable Torsion Stiffness*
 This is a preprint of a paper that appeared in the Proceedings of International Conference on Advanced Intelligent Mechatronics,, Wollongong Power-optimized Stiffness and Nonlinear Position Control of
This is a preprint of a paper that appeared in the Proceedings of International Conference on Advanced Intelligent Mechatronics,, Wollongong Power-optimized Stiffness and Nonlinear Position Control of
Accurate force function approximation for pneumatic artificial muscles
 Accurate force function approximation for pneumatic artificial muscles Tamas Szepe Department of Technical Informatics, University of Szeged, Hungary; email: szepe.tamas@gmail.com Abstract Many papers
Accurate force function approximation for pneumatic artificial muscles Tamas Szepe Department of Technical Informatics, University of Szeged, Hungary; email: szepe.tamas@gmail.com Abstract Many papers
Controlled actuation of Nafion-based Ionic Polymer-metal Composites (IPMCs) with Ethylene Glycol as Solvent
 with Ethylene Glycol as Solvent") Controlled actuation of Nafion-based Ionic Polymer-metal Composites (IPMCs) with Ethylene Glycol as Solvent Shahram Zamani and Sia Nemat-Nasser University of California, San Diego Center of Excellence
Controlled actuation of Nafion-based Ionic Polymer-metal Composites (IPMCs) with Ethylene Glycol as Solvent Shahram Zamani and Sia Nemat-Nasser University of California, San Diego Center of Excellence
Analysis of Circular Robot Jumping by Body Deformation
 27 IEEE International Conference on Robotics and Automation Roma, Italy, 1-14 April 27 ThA1. Analysis of Circular Robot Jumping by Body Deformation Yoshinari Matsuyama and Shinichi Hirai Abstract As jumping
27 IEEE International Conference on Robotics and Automation Roma, Italy, 1-14 April 27 ThA1. Analysis of Circular Robot Jumping by Body Deformation Yoshinari Matsuyama and Shinichi Hirai Abstract As jumping
Transduction Based on Changes in the Energy Stored in an Electrical Field
 Lecture 6-1 Transduction Based on Changes in the Energy Stored in an Electrical Field Electric Field and Forces Suppose a charged fixed q 1 in a space, an exploring charge q is moving toward the fixed
Lecture 6-1 Transduction Based on Changes in the Energy Stored in an Electrical Field Electric Field and Forces Suppose a charged fixed q 1 in a space, an exploring charge q is moving toward the fixed
Design and Control of Variable Stiffness Actuation Systems
 Design and Control of Variable Stiffness Actuation Systems Gianluca Palli, Claudio Melchiorri, Giovanni Berselli and Gabriele Vassura DEIS - DIEM - Università di Bologna LAR - Laboratory of Automation
Design and Control of Variable Stiffness Actuation Systems Gianluca Palli, Claudio Melchiorri, Giovanni Berselli and Gabriele Vassura DEIS - DIEM - Università di Bologna LAR - Laboratory of Automation
Article de périodique (Journal article)
") Article de périodique (Journal article) "Variable Stiffness Actuator applied to an active ankle prosthesis: Principle, energy-efficiency, and control" Everarts, Christophe ; Dehez, Bruno ; Ronsse, Renaud
Article de périodique (Journal article) "Variable Stiffness Actuator applied to an active ankle prosthesis: Principle, energy-efficiency, and control" Everarts, Christophe ; Dehez, Bruno ; Ronsse, Renaud
A Laboratory Demonstration of a Parallel Robotic Mechanism with Integrated EPAM Actuators. Ebraheem I. Fontaine
 A Laboratory Demonstration of a Parallel Robotic Mechanism with Integrated EPAM Actuators by Ebraheem I. Fontaine Submitted to the Department of Mechanical Engineering in Partial Fulfillment of the Requirements
A Laboratory Demonstration of a Parallel Robotic Mechanism with Integrated EPAM Actuators by Ebraheem I. Fontaine Submitted to the Department of Mechanical Engineering in Partial Fulfillment of the Requirements
Lecture 19. Measurement of Solid-Mechanical Quantities (Chapter 8) Measuring Strain Measuring Displacement Measuring Linear Velocity
 Measuring Strain Measuring Displacement Measuring Linear Velocity") MECH 373 Instrumentation and Measurements Lecture 19 Measurement of Solid-Mechanical Quantities (Chapter 8) Measuring Strain Measuring Displacement Measuring Linear Velocity Measuring Accepleration and
MECH 373 Instrumentation and Measurements Lecture 19 Measurement of Solid-Mechanical Quantities (Chapter 8) Measuring Strain Measuring Displacement Measuring Linear Velocity Measuring Accepleration and
Lecture 20. Measuring Pressure and Temperature (Chapter 9) Measuring Pressure Measuring Temperature MECH 373. Instrumentation and Measurements
 Measuring Pressure Measuring Temperature MECH 373. Instrumentation and Measurements") MECH 373 Instrumentation and Measurements Lecture 20 Measuring Pressure and Temperature (Chapter 9) Measuring Pressure Measuring Temperature 1 Measuring Acceleration and Vibration Accelerometers using
MECH 373 Instrumentation and Measurements Lecture 20 Measuring Pressure and Temperature (Chapter 9) Measuring Pressure Measuring Temperature 1 Measuring Acceleration and Vibration Accelerometers using
Representation of a Conceptual Design for a Rectilinear Motion Polymer Actuator
 International Journal Representation of Control, Automation, of a Conceptual and Systems, Design for vol. a 5, Rectilinear no. 4, pp. Motion 49-435, Polymer August Actuator 007 49 Representation of a Conceptual
International Journal Representation of Control, Automation, of a Conceptual and Systems, Design for vol. a 5, Rectilinear no. 4, pp. Motion 49-435, Polymer August Actuator 007 49 Representation of a Conceptual
Actuators. ... physical devices that transform electrical, chemical, or thermal energy into mechanical energy...
 Actuators... physical devices that transform electrical, chemical, or thermal energy into mechanical energy... challenges and opportunities with respect to power density, dynamic range, packaging, and
Actuators... physical devices that transform electrical, chemical, or thermal energy into mechanical energy... challenges and opportunities with respect to power density, dynamic range, packaging, and
Björn Verrelst, Ronald Van Ham, Jimmy Vermeulen, Dirk Lefeber, and Frank Daerden
 Concept of Combining Adaptable Passive Behaviour with an Active Control Structure Using Pleated Pneumatic Artificial Muscles for the Bipedal Robot LUCY Björn Verrelst, Ronald Van Ham, Jimmy Vermeulen,
Concept of Combining Adaptable Passive Behaviour with an Active Control Structure Using Pleated Pneumatic Artificial Muscles for the Bipedal Robot LUCY Björn Verrelst, Ronald Van Ham, Jimmy Vermeulen,
Operator-based Modeling for Nonlinear Ionic Polymer Metal Composite with Uncertainties
 SCIS & ISIS, Dec. 8-,, Okayama Convention Center, Okayama, Japan Operator-based Modeling for Nonlinear Ionic Polymer Metal Composite with Uncertainties Mingcong Deng a, Aihui Wang b, Mamoru Minami b, and
SCIS & ISIS, Dec. 8-,, Okayama Convention Center, Okayama, Japan Operator-based Modeling for Nonlinear Ionic Polymer Metal Composite with Uncertainties Mingcong Deng a, Aihui Wang b, Mamoru Minami b, and
Transduction Based on Changes in the Energy Stored in an Electrical Field
 Lecture 6- Transduction Based on Changes in the Energy Stored in an Electrical Field Actuator Examples Microgrippers Normal force driving In-plane force driving» Comb-drive device F = εav d 1 ε oε F rwv
Lecture 6- Transduction Based on Changes in the Energy Stored in an Electrical Field Actuator Examples Microgrippers Normal force driving In-plane force driving» Comb-drive device F = εav d 1 ε oε F rwv
A Stacked-type Electrostatic Actuator and Measurement of its Energy Efficiency
 A Stacked-type Electrostatic Actuator and Measurement of its Energy Efficiency Yoshiyuki Hata Tokyo Institute of Technology yoshiyuki@ric.titech.ac.jp Keiji Saneyoshi Tokyo Institute of Technology ksaneyos@ric.titech.ac.jp
A Stacked-type Electrostatic Actuator and Measurement of its Energy Efficiency Yoshiyuki Hata Tokyo Institute of Technology yoshiyuki@ric.titech.ac.jp Keiji Saneyoshi Tokyo Institute of Technology ksaneyos@ric.titech.ac.jp
Flexible, low-mass robotic arm actuated by electroactive polymers
 Proceedings of SPIE's 5 th Annual International Symposium on Smart Structures and Materials, 1-5 March, 1998, San Diego, CA. Paper No. 3329-07 SPIE Copyright 1998 Flexible, low-mass robotic arm actuated
Proceedings of SPIE's 5 th Annual International Symposium on Smart Structures and Materials, 1-5 March, 1998, San Diego, CA. Paper No. 3329-07 SPIE Copyright 1998 Flexible, low-mass robotic arm actuated
Dimensioning and Evaluation of the Elastic Element in a Variable Torsion Stiffness Actuator*
 This is a preprint of a paper that appeared in the Proceedings of International Conference on Advanced Intelligent Mechatronics, 213, Wollongong Dimensioning and Evaluation of the Elastic Element in a
This is a preprint of a paper that appeared in the Proceedings of International Conference on Advanced Intelligent Mechatronics, 213, Wollongong Dimensioning and Evaluation of the Elastic Element in a
A Physically-Based Fault Detection and Isolation Method and Its Uses in Robot Manipulators
 des FA 4.13 Steuerung und Regelung von Robotern A Physically-Based Fault Detection and Isolation Method and Its Uses in Robot Manipulators Alessandro De Luca Dipartimento di Informatica e Sistemistica
des FA 4.13 Steuerung und Regelung von Robotern A Physically-Based Fault Detection and Isolation Method and Its Uses in Robot Manipulators Alessandro De Luca Dipartimento di Informatica e Sistemistica
Development of a Fatigue Testing Setup for Dielectric Elastomer Membrane Actuators
 1 2 3 4 5 6 7 8 9 1 0 11 12 Development of a Fatigue Testing Setup for Dielectric Elastomer Membrane Actuators M. Hill* a,b, G. Rizzello a, S. Seelecke a a Department of Systems Engineering, Department
1 2 3 4 5 6 7 8 9 1 0 11 12 Development of a Fatigue Testing Setup for Dielectric Elastomer Membrane Actuators M. Hill* a,b, G. Rizzello a, S. Seelecke a a Department of Systems Engineering, Department
PIEZOELECTRIC MATERIALS USED FOR PORTABLE
 PIEZOELECTRIC MATERIALS USED FOR PORTABLE DEVICE SUPPLY G. Poulin, E. Sarraute, F. Costa, J.-C. Faugière SATIE ENS Cachan, Cachan, France Abstract: The focus of this paper is to study the feasibility of
PIEZOELECTRIC MATERIALS USED FOR PORTABLE DEVICE SUPPLY G. Poulin, E. Sarraute, F. Costa, J.-C. Faugière SATIE ENS Cachan, Cachan, France Abstract: The focus of this paper is to study the feasibility of
TORQUE CHARACTERISTICS OF ROTARY PNEUMATIC MUSCLE ACTUATOR
 TORQUE CHARACTERISTICS OF ROTARY PNEUMATIC MUSCLE ACTUATOR MILAN BALARA, MARIA TOTHOVA Technical University of Kosice, Faculty of Manufacturing Technologies with a seat in Presov, Slovak Republic DOI:.797/MMSJ.6_9_67
TORQUE CHARACTERISTICS OF ROTARY PNEUMATIC MUSCLE ACTUATOR MILAN BALARA, MARIA TOTHOVA Technical University of Kosice, Faculty of Manufacturing Technologies with a seat in Presov, Slovak Republic DOI:.797/MMSJ.6_9_67
Study of flapping actuator modules using IPMC
 Study of flapping actuator modules using IPMC Hong-Il Kim, Dae-Kwan Kim, and Jae-Hung Han Department of Aerospace Engineering, Korea Advanced Institute of Science and Technology Daejeon 305-701, Republic
Study of flapping actuator modules using IPMC Hong-Il Kim, Dae-Kwan Kim, and Jae-Hung Han Department of Aerospace Engineering, Korea Advanced Institute of Science and Technology Daejeon 305-701, Republic
Second Generation Pleated Pneumatic Artificial Muscle and Its Robotic Applications
 Second Generation Pleated Pneumatic Artificial Muscle and Its Robotic Applications Björn Verrelst, Ronald Van Ham, Bram Vanderborght, Dirk Lefeber & Frank Daerden Vrije Universiteit Brussel, Department
Second Generation Pleated Pneumatic Artificial Muscle and Its Robotic Applications Björn Verrelst, Ronald Van Ham, Bram Vanderborght, Dirk Lefeber & Frank Daerden Vrije Universiteit Brussel, Department
Drug Delivery Systems
 Introduction to BioMEMS & Medical Microdevices Drug Delivery Systems Companion lecture to the textbook: Fundamentals of BioMEMS and Medical Microdevices, by Prof., http://saliterman.umn.edu/ Star Tribune
Introduction to BioMEMS & Medical Microdevices Drug Delivery Systems Companion lecture to the textbook: Fundamentals of BioMEMS and Medical Microdevices, by Prof., http://saliterman.umn.edu/ Star Tribune
A passively safe cable driven upper limb rehabilitation exoskeleton
 Technology and Health Care 23 (2015) S197 S202 DOI 10.3233/THC-150954 IOS Press S197 A passively safe cable driven upper limb rehabilitation exoskeleton Yanyan Chen, Jizhuang Fan, Yanhe Zhu, Jie Zhao and
Technology and Health Care 23 (2015) S197 S202 DOI 10.3233/THC-150954 IOS Press S197 A passively safe cable driven upper limb rehabilitation exoskeleton Yanyan Chen, Jizhuang Fan, Yanhe Zhu, Jie Zhao and
Demonstrating the Benefits of Variable Impedance to Telerobotic Task Execution
 Demonstrating the Benefits of Variable Impedance to Telerobotic Task Execution Daniel S. Walker, J. Kenneth Salisbury and Günter Niemeyer Abstract Inspired by human physiology, variable impedance actuation
Demonstrating the Benefits of Variable Impedance to Telerobotic Task Execution Daniel S. Walker, J. Kenneth Salisbury and Günter Niemeyer Abstract Inspired by human physiology, variable impedance actuation
Journal of Biomechanical Science and Engineering
 Science and Engineering Bioinspired Propulsion Mechanism in Fluid Using Fin with Dynamic Variable-Effective-Length Spring * Shunichi KOBAYASHI ** Masataka NAKABAYASHI ** and Hirohisa MORIKAWA ** **Department
Science and Engineering Bioinspired Propulsion Mechanism in Fluid Using Fin with Dynamic Variable-Effective-Length Spring * Shunichi KOBAYASHI ** Masataka NAKABAYASHI ** and Hirohisa MORIKAWA ** **Department
Modeling and Control of Robots with Compliant Actuation
 PhD Thesis in System Engineering XXIV Ciclo Modeling and Control of Robots with Compliant Actuation Fabrizio Flacco Advisor Prof. Alessandro De Luca April 2012 Dipartimento di Ingegneria Informatica, Automatica
PhD Thesis in System Engineering XXIV Ciclo Modeling and Control of Robots with Compliant Actuation Fabrizio Flacco Advisor Prof. Alessandro De Luca April 2012 Dipartimento di Ingegneria Informatica, Automatica
Out-of-Plane Motion of a Planner Dielectric Elastomer Actuator with Distributed Stiffeners
 Out-of-Plane Motion of a Planner Dielectric Elastomer Actuator with Distributed Stiffeners William Lai* a, Ashraf F. Bastawros a, Wei Hong a a Department of Aerospace Engineering, Iowa State University,
Out-of-Plane Motion of a Planner Dielectric Elastomer Actuator with Distributed Stiffeners William Lai* a, Ashraf F. Bastawros a, Wei Hong a a Department of Aerospace Engineering, Iowa State University,
Fast Low-Voltage Electroactive Actuators. Using Nanostructured Polymer Electrolytes
 Supplementary Information Fast Low-Voltage Electroactive Actuators Using Nanostructured Polymer Electrolytes Onnuri Kim 1, Tae Joo Shin 2, and Moon Jeong Park 1,3* 1 Division of Advanced Materials Science
Supplementary Information Fast Low-Voltage Electroactive Actuators Using Nanostructured Polymer Electrolytes Onnuri Kim 1, Tae Joo Shin 2, and Moon Jeong Park 1,3* 1 Division of Advanced Materials Science
Thickness Optimization of a Piezoelectric Converter for Energy Harvesting
 Excerpt from the Proceedings of the COMSOL Conference 29 Milan Thickness Optimization of a Piezoelectric Converter for Energy Harvesting M. Guizzetti* 1, V. Ferrari 1, D. Marioli 1 and T. Zawada 2 1 Dept.
Excerpt from the Proceedings of the COMSOL Conference 29 Milan Thickness Optimization of a Piezoelectric Converter for Energy Harvesting M. Guizzetti* 1, V. Ferrari 1, D. Marioli 1 and T. Zawada 2 1 Dept.
Tailoring actuation of ionic polymer-metal composites through cation combination
 Tailoring actuation of ionic polymer-metal composites through cation combination Sia Nemat-Nasser * and Yongxian Wu University of California, San Diego. Center of Excellence for Advanced Materials 9500
Tailoring actuation of ionic polymer-metal composites through cation combination Sia Nemat-Nasser * and Yongxian Wu University of California, San Diego. Center of Excellence for Advanced Materials 9500
Modellierung, Entwurf und automatisierte Herstellung von Multilayer-Polymeraktoren
 Modellierung, Entwurf und automatisierte Herstellung von Multilayer-Polymeraktoren Modeling, design and automated fabrication of polymer-based multilayer actuators Thorben Hoffstadt, Dominik Tepel und
Modellierung, Entwurf und automatisierte Herstellung von Multilayer-Polymeraktoren Modeling, design and automated fabrication of polymer-based multilayer actuators Thorben Hoffstadt, Dominik Tepel und
MODELLING AND CONTROL OF PAM UNDER LOW PRESSURES AND AT SHORT LENGTHS
 Page 39 MODELLING AND CONTROL OF PAM UNDER LOW PRESSURES AND AT SHORT LENGTHS Fernando d Assunção Morgado Junior Jorge Audrin Morgado de Gois, audrin@ime.eb.br Military Institute of Engineering, 8 General
Page 39 MODELLING AND CONTROL OF PAM UNDER LOW PRESSURES AND AT SHORT LENGTHS Fernando d Assunção Morgado Junior Jorge Audrin Morgado de Gois, audrin@ime.eb.br Military Institute of Engineering, 8 General
Variable Stiffness Actuators for Fast and Safe Motion Control
 Variable Stiffness Actuators for Fast and Safe Motion Control Antonio Bicchi 1, Giovanni Tonietti 1, Michele Bavaro 1, and Marco Piccigallo 1 Centro Interdipartimentale di Ricerca E. Piaggio Università
Variable Stiffness Actuators for Fast and Safe Motion Control Antonio Bicchi 1, Giovanni Tonietti 1, Michele Bavaro 1, and Marco Piccigallo 1 Centro Interdipartimentale di Ricerca E. Piaggio Università
INF5490 RF MEMS. LN03: Modeling, design and analysis. Spring 2008, Oddvar Søråsen Department of Informatics, UoO
 INF5490 RF MEMS LN03: Modeling, design and analysis Spring 2008, Oddvar Søråsen Department of Informatics, UoO 1 Today s lecture MEMS functional operation Transducer principles Sensor principles Methods
INF5490 RF MEMS LN03: Modeling, design and analysis Spring 2008, Oddvar Søråsen Department of Informatics, UoO 1 Today s lecture MEMS functional operation Transducer principles Sensor principles Methods
Actuation of Artificial Muscle Based on IPMC by Electromyography (EMG) Signal
 Signal") Actuation of Artificial Muscle Based on IPMC by Electromyography (EMG) Signal Myoung-Joon Lee, Sung-Hee Jung, Inhyuk Moon, Suk-Min Lee, and Mu-Sung Mun Korea Orthopedics and Rehabilitation Engineering
Actuation of Artificial Muscle Based on IPMC by Electromyography (EMG) Signal Myoung-Joon Lee, Sung-Hee Jung, Inhyuk Moon, Suk-Min Lee, and Mu-Sung Mun Korea Orthopedics and Rehabilitation Engineering
Stiction Compensation in Agonist-Antagonist Variable Stiffness Actuators
 Robotics: Science and Systems 2014 Berkeley, CA, USA, July 12-16, 2014 Stiction Compensation in Agonist-Antagonist Variable Stiffness Actuators Luca Fiorio Francesco Romano Alberto Parmiggiani Giulio Sandini
Robotics: Science and Systems 2014 Berkeley, CA, USA, July 12-16, 2014 Stiction Compensation in Agonist-Antagonist Variable Stiffness Actuators Luca Fiorio Francesco Romano Alberto Parmiggiani Giulio Sandini
Artificial Muscle Actuator Based on the Synthetic Elastomer
 894 International Journal of Control, Automation, and Systems, vol. 6, no. 6, pp. 894-903, December 008 Artificial Muscle Actuator Based on the Synthetic Elastomer Nguyen Huu Chuc, Ja Choon Koo, Young
894 International Journal of Control, Automation, and Systems, vol. 6, no. 6, pp. 894-903, December 008 Artificial Muscle Actuator Based on the Synthetic Elastomer Nguyen Huu Chuc, Ja Choon Koo, Young
Overview. Sensors? Commonly Detectable Phenomenon Physical Principles How Sensors Work? Need for Sensors Choosing a Sensor Examples
 Intro to Sensors Overview Sensors? Commonly Detectable Phenomenon Physical Principles How Sensors Work? Need for Sensors Choosing a Sensor Examples Sensors? American National Standards Institute A device
Intro to Sensors Overview Sensors? Commonly Detectable Phenomenon Physical Principles How Sensors Work? Need for Sensors Choosing a Sensor Examples Sensors? American National Standards Institute A device
FREQUENCY BEHAVIOR OF RYLEIGH HYPER-ELASTIC MICRO- BEAM
 International Journal of Industrial Electronics and Electrical Engineering, ISSN(p: 7-698, ISSN(e: 9-X Volume-6, Issue-, Apr.-18, http://ijieee.org.in FREQUENCY BEHAVIOR OF RYLEIGH HYPER-ELASTIC MICRO-
International Journal of Industrial Electronics and Electrical Engineering, ISSN(p: 7-698, ISSN(e: 9-X Volume-6, Issue-, Apr.-18, http://ijieee.org.in FREQUENCY BEHAVIOR OF RYLEIGH HYPER-ELASTIC MICRO-
University of Twente. EEMCS / Electrical Engineering
 University of Twente EEMCS / Electrical Engineering Robotics and Mechatronics Real-Time Environmental Impedance Estimation Using a Variable Stiffness Actuator as a Variable Stiffness Sensor R.M. (Rick)
University of Twente EEMCS / Electrical Engineering Robotics and Mechatronics Real-Time Environmental Impedance Estimation Using a Variable Stiffness Actuator as a Variable Stiffness Sensor R.M. (Rick)
Optimality Principles in Variable Stiffness Control: The VSA Hammer
 Optimality Principles in Variable Stiffness Control: he VSA Hammer Manolo Garabini, Andrea Passaglia, Felipe Belo, Paolo Salaris, and Antonio Bicchi Abstract he control of a robot s mechanical impedance
Optimality Principles in Variable Stiffness Control: he VSA Hammer Manolo Garabini, Andrea Passaglia, Felipe Belo, Paolo Salaris, and Antonio Bicchi Abstract he control of a robot s mechanical impedance
CHAPTER 4 DESIGN AND ANALYSIS OF CANTILEVER BEAM ELECTROSTATIC ACTUATORS
 61 CHAPTER 4 DESIGN AND ANALYSIS OF CANTILEVER BEAM ELECTROSTATIC ACTUATORS 4.1 INTRODUCTION The analysis of cantilever beams of small dimensions taking into the effect of fringing fields is studied and
61 CHAPTER 4 DESIGN AND ANALYSIS OF CANTILEVER BEAM ELECTROSTATIC ACTUATORS 4.1 INTRODUCTION The analysis of cantilever beams of small dimensions taking into the effect of fringing fields is studied and
Toward Torque Control of a KUKA LBR IIWA for Physical Human-Robot Interaction
 Toward Torque Control of a UA LBR IIWA for Physical Human-Robot Interaction Vinay Chawda and Günter Niemeyer Abstract In this paper we examine joint torque tracking as well as estimation of external torques
Toward Torque Control of a UA LBR IIWA for Physical Human-Robot Interaction Vinay Chawda and Günter Niemeyer Abstract In this paper we examine joint torque tracking as well as estimation of external torques
Functional and smart materials
 Functional and smart materials 2014-2015 Engineering from past to present One of the scopes of the engineers has always been the realization of components to optimally respond to the requested needs. The
Functional and smart materials 2014-2015 Engineering from past to present One of the scopes of the engineers has always been the realization of components to optimally respond to the requested needs. The
Contact Distinction in Human-Robot Cooperation with Admittance Control
 Contact Distinction in Human-Robot Cooperation with Admittance Control Alexandros Kouris, Fotios Dimeas and Nikos Aspragathos Robotics Group, Dept. of Mechanical Engineering & Aeronautics University of
Contact Distinction in Human-Robot Cooperation with Admittance Control Alexandros Kouris, Fotios Dimeas and Nikos Aspragathos Robotics Group, Dept. of Mechanical Engineering & Aeronautics University of
Inverse Dynamics of Gel Robots made of Electro-Active Polymer Gel
 Proceedings of the 2003 IEEE International Conference on Robotics & Automation Taipei, Taiwan, September 14-19, 2003 Inverse Dynamics of Gel Robots made of Electro-Active Polymer Gel Mihoko OTAKE Yoshiharu
Proceedings of the 2003 IEEE International Conference on Robotics & Automation Taipei, Taiwan, September 14-19, 2003 Inverse Dynamics of Gel Robots made of Electro-Active Polymer Gel Mihoko OTAKE Yoshiharu
DEVELOPMENT OF JUMP ASSIST SYSTEM USING PNEUMATIC RUBBER MUSCLE
 DEVELOPMENT OF JUMP ASSIST SYSTEM USING PNEUMATIC RUBBER MUSCLE Kotaro TADANO*, Hiroshi ARAYA**, Kenji KAWASHIMA*, Chongo YOUN *, Toshiharu KAGAWA* * Precision and Intelligence Laboratory, Tokyo Institute
DEVELOPMENT OF JUMP ASSIST SYSTEM USING PNEUMATIC RUBBER MUSCLE Kotaro TADANO*, Hiroshi ARAYA**, Kenji KAWASHIMA*, Chongo YOUN *, Toshiharu KAGAWA* * Precision and Intelligence Laboratory, Tokyo Institute
Energy Harvesting Applications of Ionic Polymers
 Energy Harvesting Applications of Ionic Polymers by Benjamin R. Martin Thesis submitted to the Faculty of the Virginia Polytechnic Institute and State University in partial fulfillment of the requirements
Energy Harvesting Applications of Ionic Polymers by Benjamin R. Martin Thesis submitted to the Faculty of the Virginia Polytechnic Institute and State University in partial fulfillment of the requirements
VNSA: Variable Negative Stiffness Actuation based on Nonlinear Deflection Characteristics of Buckling Beams
 13 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) November 3-7, 13. Tokyo, Japan VNSA: Variable Negative Stiffness Actuation based on Nonlinear Deflection Characteristics of
13 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) November 3-7, 13. Tokyo, Japan VNSA: Variable Negative Stiffness Actuation based on Nonlinear Deflection Characteristics of
MECHANICS OF PNEUMATIC ARTIFICIAL MUSCLE
 MECHANICS OF PNEUMATIC ARTIFICIAL MUSCLE *Zdeněk Varga, **Michal Moučka *Technical University of Liberec, Department of Applied Cybernetics Studentská 2, 46117, Liberec 1, Czech Republic Email: zdenek.varga@atlas.cz
MECHANICS OF PNEUMATIC ARTIFICIAL MUSCLE *Zdeněk Varga, **Michal Moučka *Technical University of Liberec, Department of Applied Cybernetics Studentská 2, 46117, Liberec 1, Czech Republic Email: zdenek.varga@atlas.cz