EEO 401 Digital Signal Processing Prof. Mark Fowler
|
|
|
- Christian Osborne
- 5 years ago
- Views:
Transcription
1 EEO 401 Digital Signal Processing Pro. Mark Fowler Note Set #10 Fourier Analysis or DT Signals eading Assignment: Sect. 4.2 & 4.4 o Proakis & Manolakis Much o Ch. 4 should be review so you are expected to read it to reresh your memory. We ll ocus on a ew topics you might not have seen beore 1/18
2 Fourier Series or DT Periodic Signals (DTFS) The idea here is the same as FS or CT periodic signals just a ew details are dierent. Let x[n] be a periodic signal with period o N: x[n+n] = x[n] We deine the undamental requency as 2π/N in units o rad/sample n exactly the same way as or CT FS we can decompose the periodic signal x[n] into a sum o complex sinusoids with requencies that are integer multiples o the undamental The key dierence here is that or DT requencies we can limit our selves to the range 0 to 2π. So the requencies o interest are: 2 k / N, k 0,1,2,, N 1 FS or DT Signal N 1 [ ] k j2 kn/ N, 0,1,2,, 1 k 0 xn ce n N Though extendable to other n via periodicity 2/18
3 Similar to how we ind the FS coeicients or CT the DTFS coeicients are N 1 1 j2 kn/ N ck x[ n] e, k 0,1,2,, N 1 N n0 t is easy to veriy that c k+n = c k. n other words, the DTFS coeicients themselves have a periodic nature in requency. DTFS vs DTFT xn [ ] N 1 ce k k0 j2 kn/ N 1 jn xn [ ] ( ) e d 2 2 c k 1 N N 1 n0 x[ n] e j2 kn/ N j n ( ) x[ n] e n ninite summation so issues o convergence & truncation 3/18
4 CT Signals DT Signals Aperiodic Signals Periodic Signals Periodicity w/ period α in one domain automatically implies discretization with spacing o 1/α in the other domain and vice versa! 4/18
5 Convergence o DTFT The equation or inding the DTFT o a signal is j n ( ) x[ n] e n t involves an ininite sum so there are issues with its convergence. ecall our study o OC or ZT and the link between ZT & DTFT! Deine: j n ( ) x[ n] e N Mathematicians have many dierent ways to characterize convergence the one we consider irst is called Uniorm Convergence. We say that Like we saw in our studies o ZT a suicient condition is absolute summability o x[n]. The DTFT converges uniormly i n N nn N ( ) converges uniormly to xn [ ] ( ) when limsup ( ) N ( ) 0 N A more general concept o max This roughly says that the largest dierence between the two keeps getting smaller However in DSP the class o signals o interest are energy signals ( square summable ) and not all o those are absolutely summable 5/18
6 To allow us to deal with energy signals we have to relax our expectation on the type o convergence we ll accept. We consider Mean Square Convergence deined as 2 lim ( ) N ( ) d 0 N This says that were are looking or the area o squared error to go to zero. However, the area can go to zero even though the largest dierence between the two does not go to zero. Example DTFT o sinc unction Peak o ripple stays same Area o squared error goes to zero 6/18
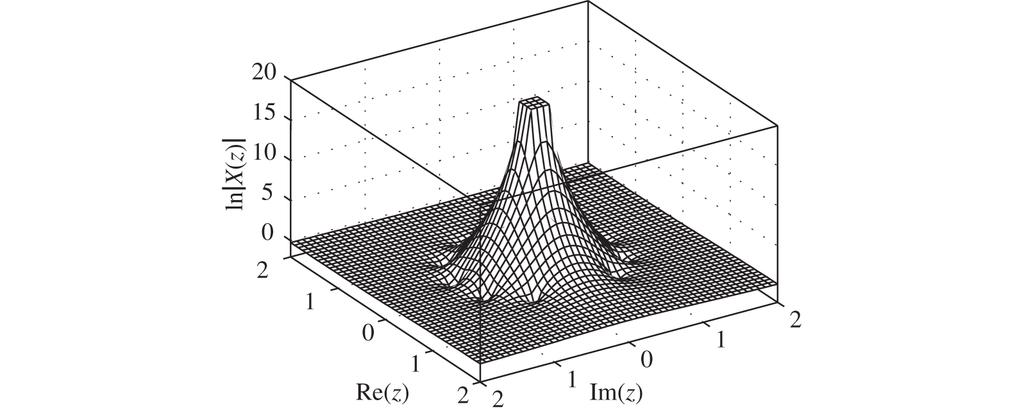
7 elationship o DTFT to ZT We ve already discussed this but we ll see it again here. z n ( z) x[ n] z, OC: z n 2 1 the OC contains the UC then we can replace z by its values on the UC: z j e z n z j jn jn ( ) [ ] ( ) [ ] ( ) [ ] z xnz e xne xne n n n Viewed as a unction o ω yields the DTFT So the OC contains the UC then we get the DTFT by evaluating the ZT on the UC But there are some signals w/ DTFT that do not come rom a ZT. One o those is the sinc unction t has a DTFT but does not have a ZT! 7/18
8 8/18
9 DTFT o Signals w/ Poles on UC Even though these don t satisy the UC in OC criteria i we allow the DTFT to contain delta unctions we can get DTFT results or such signals. z 1 Consider the signal x[n] = u[n] whose ZT is ( z) 1 1 z t has a pole on the UC so clearly the OC does not contain the UC. But in Signals & Systems we said that its DTFT is ( ) ( 2 k) 1 1 j e k Evaluate ZT on UC except at poles Accounts or pole at z = 1, which is at ω = 2πk 9/18
10 Symmetry Properties o the DTFT Due to similarities between all the Fourier tools these hold or the other Fourier tools as well n this section we will allow the signal to be complex valued in general (Obviously, the DTFT is also in general complex valued) xn [ ] x[ n] jx[ n] ( ) ( ) j ( ) jn ( ) x[ n] e x [ n] jx [ n] e n n jn n n x [ n] jx [ n] cos( n) jsin( n) x [ n]cos( n) x [ n]sin( n) j x [ n]sin( n) x [ n]cos( n) 10/18
11 Thus. ( ) ( ) j ( ) with. ( ) x [ n ]cos( n ) x [ n ]sin( n ) n ( ) x [ n ]sin( n ) x [ n ]cos( n ) n Similarly. xn [ ] x[ n] jx[ n] with. 1 [ ] ( )cos( ) ( )sin( ) 2 x n n n d 1 [ ] ( )sin( ) ( )cos( ) 2 x n n n d We can now use these general results to explore several special cases! 11/18
12 eal Signals x[ n] 0 x[ n] x[ n] ( ) x [ n ]cos( n ) x [ n ]sin( n ) n ( ) x [ n ]sin( n ) x [ n ]cos( n ) n ( ) x[ n]cos( n) n ( ) x[ n]sin( n) n Even Function because cos is even ( ) ( ) Odd Function because sine is odd ( ) ( ) ( ) ( ) * ( ) ( ) ( ) ( ) Hermitian Symmetry Magn is Even Phase is Odd Proo: ( ) ( ) j ( ) ( ) j( ) * ( ) 12/18
13 eal Signals (cont.) 1 [ ] [ ] ( )cos( ) ( )sin( ) 2 xn x n n n d Even = Even x Even Even = Odd x Odd So only need to integrate over hal the range then x2 1 [ ] ( )cos( ) ( )sin( ) 0 xn n n d 13/18
14 eal & Even Signals From the act that x[n] is real we recall that ( ) x[ n]cos( n) n ( ) x[ n]sin( n) n Even = Even x Even Odd = Even x Odd ( ) x[0] 2 x[ n]cos( n) n1 ( ) 0 x x n n n1 ( ) ( ) [0] 2 [ ]cos( ) Even & eal From the act that x[n] is real we recall that 1 [ ] ( )cos( ) ( )sin( ) 0 xn n n d 1 [ ] ( )cos( ) 0 xn nd 14/18
15 eal & Odd Signals Using a similar argument ( ) 0 ( ) 2 x[ n]sin( n) n1 j j x n n n1 ( ) ( ) 2 [ ]sin( ) Odd & maginary From the act that x[n] is real we recall that 1 [ ] ( )cos( ) ( )sin( ) 0 xn n n d 1 [ ] ( )sin( ) 0 xn nd 15/18
16 Purely maginary Signals ( ) x [ n ]cos( n ) x [ n ]sin( n ) n ( ) x [ n ]sin( n ) x [ n ]cos( n ) n ( ) x[ n]sin( n) n x [ n] 0 x [ n] x[ n] ( ) x[ n]cos( n) n Odd Function because sin is odd ( ) ( ) Even Function because cos is even ( ) ( ) 1 [ ] ( )sin( ) ( )cos( ) 0 xn n n d 16/18
17 maginary & Even Signals ( ) 0 ( ) x[0] 2 x[ n]cos( n) n1 ( ) ( ) [0] 2 [ ]cos( ) j jx x n n n1 Even & maginary 1 [ ] ( )cos( ) 0 xn nd maginary & Odd Signals ( ) 0 xn n ( ) 2 [ ]sin( ) n1 x n n n1 ( ) ( ) 2 [ ]sin( ) Odd & eal 1 [ ] ( )sin( ) 0 xn nd 17/18
18 Also see Table 4.4 in the Textbook 18/18
EEO 401 Digital Signal Processing Prof. Mark Fowler
 EEO 4 Digital Signal Processing Pro. Mark Fowler ote Set # Using the DFT or Spectral Analysis o Signals Reading Assignment: Sect. 7.4 o Proakis & Manolakis Ch. 6 o Porat s Book /9 Goal o Practical Spectral
EEO 4 Digital Signal Processing Pro. Mark Fowler ote Set # Using the DFT or Spectral Analysis o Signals Reading Assignment: Sect. 7.4 o Proakis & Manolakis Ch. 6 o Porat s Book /9 Goal o Practical Spectral
DSP Laboratory (EELE 4110) Lab#5 DTFS & DTFT
 Lab#5 DTFS & DTFT") Islamic University of Gaza Faculty of Engineering Electrical Engineering Department EG.MOHAMMED ELASMER Spring-22 DSP Laboratory (EELE 4) Lab#5 DTFS & DTFT Discrete-Time Fourier Series (DTFS) The discrete-time
Islamic University of Gaza Faculty of Engineering Electrical Engineering Department EG.MOHAMMED ELASMER Spring-22 DSP Laboratory (EELE 4) Lab#5 DTFS & DTFT Discrete-Time Fourier Series (DTFS) The discrete-time
ENSC327 Communications Systems 2: Fourier Representations. School of Engineering Science Simon Fraser University
 ENSC37 Communications Systems : Fourier Representations School o Engineering Science Simon Fraser University Outline Chap..5: Signal Classiications Fourier Transorm Dirac Delta Function Unit Impulse Fourier
ENSC37 Communications Systems : Fourier Representations School o Engineering Science Simon Fraser University Outline Chap..5: Signal Classiications Fourier Transorm Dirac Delta Function Unit Impulse Fourier
Discrete-time Fourier transform (DTFT) representation of DT aperiodic signals Section The (DT) Fourier transform (or spectrum) of x[n] is
![Discrete-time Fourier transform (DTFT) representation of DT aperiodic signals Section The (DT) Fourier transform (or spectrum) of x[n] is](/thumbs/89/98498368.jpg "Discrete-time Fourier transform (DTFT) representation of DT aperiodic signals Section The (DT) Fourier transform (or spectrum) of x[n] is") Discrete-time Fourier transform (DTFT) representation of DT aperiodic signals Section 5. 3 The (DT) Fourier transform (or spectrum) of x[n] is X ( e jω) = n= x[n]e jωn x[n] can be reconstructed from its
Discrete-time Fourier transform (DTFT) representation of DT aperiodic signals Section 5. 3 The (DT) Fourier transform (or spectrum) of x[n] is X ( e jω) = n= x[n]e jωn x[n] can be reconstructed from its
Definition of Discrete-Time Fourier Transform (DTFT)
") Definition of Discrete-Time ourier Transform (DTT) {x[n]} = X(e jω ) + n= {X(e jω )} = x[n] x[n]e jωn Why use the above awkward notation for the transform? X(e jω )e jωn dω Answer: It is consistent with
Definition of Discrete-Time ourier Transform (DTT) {x[n]} = X(e jω ) + n= {X(e jω )} = x[n] x[n]e jωn Why use the above awkward notation for the transform? X(e jω )e jωn dω Answer: It is consistent with
Problem Set. Problems on Unordered Summation. Math 5323, Fall Februray 15, 2001 ANSWERS
 Problem Set Problems on Unordered Summation Math 5323, Fall 2001 Februray 15, 2001 ANSWERS i 1 Unordered Sums o Real Terms In calculus and real analysis, one deines the convergence o an ininite series
Problem Set Problems on Unordered Summation Math 5323, Fall 2001 Februray 15, 2001 ANSWERS i 1 Unordered Sums o Real Terms In calculus and real analysis, one deines the convergence o an ininite series
Review of Discrete-Time System
 Review of Discrete-Time System Electrical & Computer Engineering University of Maryland, College Park Acknowledgment: ENEE630 slides were based on class notes developed by Profs. K.J. Ray Liu and Min Wu.
Review of Discrete-Time System Electrical & Computer Engineering University of Maryland, College Park Acknowledgment: ENEE630 slides were based on class notes developed by Profs. K.J. Ray Liu and Min Wu.
In many diverse fields physical data is collected or analysed as Fourier components.
 1. Fourier Methods In many diverse ields physical data is collected or analysed as Fourier components. In this section we briely discuss the mathematics o Fourier series and Fourier transorms. 1. Fourier
1. Fourier Methods In many diverse ields physical data is collected or analysed as Fourier components. In this section we briely discuss the mathematics o Fourier series and Fourier transorms. 1. Fourier
ELEG 3143 Probability & Stochastic Process Ch. 4 Multiple Random Variables
 Department o Electrical Engineering University o Arkansas ELEG 3143 Probability & Stochastic Process Ch. 4 Multiple Random Variables Dr. Jingxian Wu wuj@uark.edu OUTLINE 2 Two discrete random variables
Department o Electrical Engineering University o Arkansas ELEG 3143 Probability & Stochastic Process Ch. 4 Multiple Random Variables Dr. Jingxian Wu wuj@uark.edu OUTLINE 2 Two discrete random variables
2 Frequency-Domain Analysis
 2 requency-domain Analysis Electrical engineers live in the two worlds, so to speak, o time and requency. requency-domain analysis is an extremely valuable tool to the communications engineer, more so
2 requency-domain Analysis Electrical engineers live in the two worlds, so to speak, o time and requency. requency-domain analysis is an extremely valuable tool to the communications engineer, more so
EEO 401 Digital Signal Processing Prof. Mark Fowler
 EEO 401 Digital Signal Processing Pro. Mark Fowler Note Set #14 Practical A-to-D Converters and D-to-A Converters Reading Assignment: Sect. 6.3 o Proakis & Manolakis 1/19 The irst step was to see that
EEO 401 Digital Signal Processing Pro. Mark Fowler Note Set #14 Practical A-to-D Converters and D-to-A Converters Reading Assignment: Sect. 6.3 o Proakis & Manolakis 1/19 The irst step was to see that
Complex symmetry Signals and Systems Fall 2015
 18-90 Signals and Systems Fall 015 Complex symmetry 1. Complex symmetry This section deals with the complex symmetry property. As an example I will use the DTFT for a aperiodic discrete-time signal. The
18-90 Signals and Systems Fall 015 Complex symmetry 1. Complex symmetry This section deals with the complex symmetry property. As an example I will use the DTFT for a aperiodic discrete-time signal. The
Fourier analysis of discrete-time signals. (Lathi Chapt. 10 and these slides)
") Fourier analysis of discrete-time signals (Lathi Chapt. 10 and these slides) Towards the discrete-time Fourier transform How we will get there? Periodic discrete-time signal representation by Discrete-time
Fourier analysis of discrete-time signals (Lathi Chapt. 10 and these slides) Towards the discrete-time Fourier transform How we will get there? Periodic discrete-time signal representation by Discrete-time
( 1) ( 2) ( 1) nan integer, since the potential is no longer simple harmonic.
 ( 2) ( 1) nan integer, since the potential is no longer simple harmonic.") . Anharmonic Oscillators Michael Fowler Landau (para 8) considers a simple harmonic oscillator with added small potential energy terms mα + mβ. We ll simpliy slightly by dropping the term, to give an equation
. Anharmonic Oscillators Michael Fowler Landau (para 8) considers a simple harmonic oscillator with added small potential energy terms mα + mβ. We ll simpliy slightly by dropping the term, to give an equation
EECE 301 Signals & Systems Prof. Mark Fowler
 EECE 3 Signals & Systems Pro. Mark Fowler Discussion #9 Illustrating the Errors in DFT Processing DFT or Sonar Processing Example # Illustrating The Errors in DFT Processing Illustrating the Errors in
EECE 3 Signals & Systems Pro. Mark Fowler Discussion #9 Illustrating the Errors in DFT Processing DFT or Sonar Processing Example # Illustrating The Errors in DFT Processing Illustrating the Errors in
Chap 2. Discrete-Time Signals and Systems
 Digital Signal Processing Chap 2. Discrete-Time Signals and Systems Chang-Su Kim Discrete-Time Signals CT Signal DT Signal Representation 0 4 1 1 1 2 3 Functional representation 1, n 1,3 x[ n] 4, n 2 0,
Digital Signal Processing Chap 2. Discrete-Time Signals and Systems Chang-Su Kim Discrete-Time Signals CT Signal DT Signal Representation 0 4 1 1 1 2 3 Functional representation 1, n 1,3 x[ n] 4, n 2 0,
Overview of Discrete-Time Fourier Transform Topics Handy Equations Handy Limits Orthogonality Defined orthogonal
 Overview of Discrete-Time Fourier Transform Topics Handy equations and its Definition Low- and high- discrete-time frequencies Convergence issues DTFT of complex and real sinusoids Relationship to LTI
Overview of Discrete-Time Fourier Transform Topics Handy equations and its Definition Low- and high- discrete-time frequencies Convergence issues DTFT of complex and real sinusoids Relationship to LTI
Fourier Analysis Overview (0A)
") CTFS: Fourier Series CTFT: Fourier Transform DTFS: Fourier Series DTFT: Fourier Transform DFT: Discrete Fourier Transform Copyright (c) 2011-2016 Young W. Lim. Permission is granted to copy, distribute
CTFS: Fourier Series CTFT: Fourier Transform DTFS: Fourier Series DTFT: Fourier Transform DFT: Discrete Fourier Transform Copyright (c) 2011-2016 Young W. Lim. Permission is granted to copy, distribute
6.003 Signal Processing
 6.003 Signal Processing Week 6, Lecture A: The Discrete Fourier Transform (DFT) Adam Hartz hz@mit.edu What is 6.003? What is a signal? Abstractly, a signal is a function that conveys information Signal
6.003 Signal Processing Week 6, Lecture A: The Discrete Fourier Transform (DFT) Adam Hartz hz@mit.edu What is 6.003? What is a signal? Abstractly, a signal is a function that conveys information Signal
6.003 Signal Processing
 6.003 Signal Processing Week 6, Lecture A: The Discrete Fourier Transform (DFT) Adam Hartz hz@mit.edu What is 6.003? What is a signal? Abstractly, a signal is a function that conveys information Signal
6.003 Signal Processing Week 6, Lecture A: The Discrete Fourier Transform (DFT) Adam Hartz hz@mit.edu What is 6.003? What is a signal? Abstractly, a signal is a function that conveys information Signal
Asymptote. 2 Problems 2 Methods
 Asymptote Problems Methods Problems Assume we have the ollowing transer unction which has a zero at =, a pole at = and a pole at =. We are going to look at two problems: problem is where >> and problem
Asymptote Problems Methods Problems Assume we have the ollowing transer unction which has a zero at =, a pole at = and a pole at =. We are going to look at two problems: problem is where >> and problem
Discrete-time Signals and Systems in
 Discrete-time Signals and Systems in the Frequency Domain Chapter 3, Sections 3.1-39 3.9 Chapter 4, Sections 4.8-4.9 Dr. Iyad Jafar Outline Introduction The Continuous-Time FourierTransform (CTFT) The
Discrete-time Signals and Systems in the Frequency Domain Chapter 3, Sections 3.1-39 3.9 Chapter 4, Sections 4.8-4.9 Dr. Iyad Jafar Outline Introduction The Continuous-Time FourierTransform (CTFT) The
Figure 3.1 Effect on frequency spectrum of increasing period T 0. Consider the amplitude spectrum of a periodic waveform as shown in Figure 3.2.
 3. Fourier ransorm From Fourier Series to Fourier ransorm [, 2] In communication systems, we oten deal with non-periodic signals. An extension o the time-requency relationship to a non-periodic signal
3. Fourier ransorm From Fourier Series to Fourier ransorm [, 2] In communication systems, we oten deal with non-periodic signals. An extension o the time-requency relationship to a non-periodic signal
DSP-I DSP-I DSP-I DSP-I
 NOTES FOR 8-79 LECTURES 3 and 4 Introduction to Discrete-Time Fourier Transforms (DTFTs Distributed: September 8, 2005 Notes: This handout contains in brief outline form the lecture notes used for 8-79
NOTES FOR 8-79 LECTURES 3 and 4 Introduction to Discrete-Time Fourier Transforms (DTFTs Distributed: September 8, 2005 Notes: This handout contains in brief outline form the lecture notes used for 8-79
SIO 211B, Rudnick. We start with a definition of the Fourier transform! ĝ f of a time series! ( )
") SIO B, Rudnick! XVIII.Wavelets The goal o a wavelet transorm is a description o a time series that is both requency and time selective. The wavelet transorm can be contrasted with the well-known and very
SIO B, Rudnick! XVIII.Wavelets The goal o a wavelet transorm is a description o a time series that is both requency and time selective. The wavelet transorm can be contrasted with the well-known and very
( ) ( ) numerically using the DFT. The DTFT is defined. [ ]e. [ ] = x n. [ ]e j 2π Fn and the DFT is defined by X k. [ ]e j 2π kn/n with N = 5.
![( ) ( ) numerically using the DFT. The DTFT is defined. [ ]e. [ ] = x n. [ ]e j 2π Fn and the DFT is defined by X k. [ ]e j 2π kn/n with N = 5.](/thumbs/88/116792961.jpg "( ) ( ) numerically using the DFT. The DTFT is defined. [ ]e. [ ] = x n. [ ]e j 2π Fn and the DFT is defined by X k. [ ]e j 2π kn/n with N = 5.") ( /13) in the Ω form. ind the DTT of 8rect 3 n 2 8rect ( 3( n 2) /13) 40drcl(,5)e j 4π Let = Ω / 2π. Then 8rect 3 n 2 40 drcl( Ω / 2π,5)e j 2Ω ( /13) ind the DTT of 8rect 3( n 2) /13 by X = x n numerically
( /13) in the Ω form. ind the DTT of 8rect 3 n 2 8rect ( 3( n 2) /13) 40drcl(,5)e j 4π Let = Ω / 2π. Then 8rect 3 n 2 40 drcl( Ω / 2π,5)e j 2Ω ( /13) ind the DTT of 8rect 3( n 2) /13 by X = x n numerically
Outline. Approximate sampling theorem (AST) recall Lecture 1. P. L. Butzer, G. Schmeisser, R. L. Stens
 recall Lecture 1. P. L. Butzer, G. Schmeisser, R. L. Stens") Outline Basic relations valid or the Bernstein space B and their extensions to unctions rom larger spaces in terms o their distances rom B Part 3: Distance unctional approach o Part applied to undamental
Outline Basic relations valid or the Bernstein space B and their extensions to unctions rom larger spaces in terms o their distances rom B Part 3: Distance unctional approach o Part applied to undamental
The Fourier Transform (and more )
") The Fourier Transform (and more ) imrod Peleg ov. 5 Outline Introduce Fourier series and transforms Introduce Discrete Time Fourier Transforms, (DTFT) Introduce Discrete Fourier Transforms (DFT) Consider
The Fourier Transform (and more ) imrod Peleg ov. 5 Outline Introduce Fourier series and transforms Introduce Discrete Time Fourier Transforms, (DTFT) Introduce Discrete Fourier Transforms (DFT) Consider
6.003: Signal Processing
 6.003: Signal Processing Discrete Fourier Transform Discrete Fourier Transform (DFT) Relations to Discrete-Time Fourier Transform (DTFT) Relations to Discrete-Time Fourier Series (DTFS) October 16, 2018
6.003: Signal Processing Discrete Fourier Transform Discrete Fourier Transform (DFT) Relations to Discrete-Time Fourier Transform (DTFT) Relations to Discrete-Time Fourier Series (DTFS) October 16, 2018
Introduction to Analog And Digital Communications
 Introduction to Analog And Digital Communications Second Edition Simon Haykin, Michael Moher Chapter Fourier Representation o Signals and Systems.1 The Fourier Transorm. Properties o the Fourier Transorm.3
Introduction to Analog And Digital Communications Second Edition Simon Haykin, Michael Moher Chapter Fourier Representation o Signals and Systems.1 The Fourier Transorm. Properties o the Fourier Transorm.3
EECE 301 Signals & Systems Prof. Mark Fowler
 EECE 3 Signals & Systems Prof. ark Fowler Note Set #28 D-T Systems: DT Filters Ideal & Practical /4 Ideal D-T Filters Just as in the CT case we can specify filters. We looked at the ideal filter for the
EECE 3 Signals & Systems Prof. ark Fowler Note Set #28 D-T Systems: DT Filters Ideal & Practical /4 Ideal D-T Filters Just as in the CT case we can specify filters. We looked at the ideal filter for the
Discrete Time Signals and Systems Time-frequency Analysis. Gloria Menegaz
 Discrete Time Signals and Systems Time-frequency Analysis Gloria Menegaz Time-frequency Analysis Fourier transform (1D and 2D) Reference textbook: Discrete time signal processing, A.W. Oppenheim and R.W.
Discrete Time Signals and Systems Time-frequency Analysis Gloria Menegaz Time-frequency Analysis Fourier transform (1D and 2D) Reference textbook: Discrete time signal processing, A.W. Oppenheim and R.W.
Fourier Analysis Overview (0A)
") CTFS: Fourier Series CTFT: Fourier Transform DTFS: Fourier Series DTFT: Fourier Transform DFT: Discrete Fourier Transform Copyright (c) 2011-2016 Young W. Lim. Permission is granted to copy, distribute
CTFS: Fourier Series CTFT: Fourier Transform DTFS: Fourier Series DTFT: Fourier Transform DFT: Discrete Fourier Transform Copyright (c) 2011-2016 Young W. Lim. Permission is granted to copy, distribute
( x) f = where P and Q are polynomials.
 f = where P and Q are polynomials.") 9.8 Graphing Rational Functions Lets begin with a deinition. Deinition: Rational Function A rational unction is a unction o the orm ( ) ( ) ( ) P where P and Q are polynomials. Q An eample o a simple rational
9.8 Graphing Rational Functions Lets begin with a deinition. Deinition: Rational Function A rational unction is a unction o the orm ( ) ( ) ( ) P where P and Q are polynomials. Q An eample o a simple rational
SIGNALS AND SYSTEMS. Unit IV. Analysis of DT signals
 SIGNALS AND SYSTEMS Unit IV Analysis of DT signals Contents: 4.1 Discrete Time Fourier Transform 4.2 Discrete Fourier Transform 4.3 Z Transform 4.4 Properties of Z Transform 4.5 Relationship between Z
SIGNALS AND SYSTEMS Unit IV Analysis of DT signals Contents: 4.1 Discrete Time Fourier Transform 4.2 Discrete Fourier Transform 4.3 Z Transform 4.4 Properties of Z Transform 4.5 Relationship between Z
Section 3 Discrete-Time Signals EO 2402 Summer /05/2013 EO2402.SuFY13/MPF Section 3 1
 Section 3 Discrete-Time Signals EO 2402 Summer 2013 07/05/2013 EO2402.SuFY13/MPF Section 3 1 [p. 3] Discrete-Time Signal Description Sampling, sampling theorem Discrete sinusoidal signal Discrete exponential
Section 3 Discrete-Time Signals EO 2402 Summer 2013 07/05/2013 EO2402.SuFY13/MPF Section 3 1 [p. 3] Discrete-Time Signal Description Sampling, sampling theorem Discrete sinusoidal signal Discrete exponential
Digital Signal Processing Lecture 10 - Discrete Fourier Transform
 Digital Signal Processing - Discrete Fourier Transform Electrical Engineering and Computer Science University of Tennessee, Knoxville November 12, 2015 Overview 1 2 3 4 Review - 1 Introduction Discrete-time
Digital Signal Processing - Discrete Fourier Transform Electrical Engineering and Computer Science University of Tennessee, Knoxville November 12, 2015 Overview 1 2 3 4 Review - 1 Introduction Discrete-time
Roberto s Notes on Differential Calculus Chapter 8: Graphical analysis Section 1. Extreme points
 Roberto s Notes on Dierential Calculus Chapter 8: Graphical analysis Section 1 Extreme points What you need to know already: How to solve basic algebraic and trigonometric equations. All basic techniques
Roberto s Notes on Dierential Calculus Chapter 8: Graphical analysis Section 1 Extreme points What you need to know already: How to solve basic algebraic and trigonometric equations. All basic techniques
Estimation and detection of a periodic signal
 Estimation and detection o a periodic signal Daniel Aronsson, Erik Björnemo, Mathias Johansson Signals and Systems Group, Uppsala University, Sweden, e-mail: Daniel.Aronsson,Erik.Bjornemo,Mathias.Johansson}@Angstrom.uu.se
Estimation and detection o a periodic signal Daniel Aronsson, Erik Björnemo, Mathias Johansson Signals and Systems Group, Uppsala University, Sweden, e-mail: Daniel.Aronsson,Erik.Bjornemo,Mathias.Johansson}@Angstrom.uu.se
In this Lecture. Frequency domain analysis
 In this Lecture Frequency domain analysis Introduction In most cases we want to know the frequency content of our signal Why? Most popular analysis in frequency domain is based on work of Joseph Fourier
In this Lecture Frequency domain analysis Introduction In most cases we want to know the frequency content of our signal Why? Most popular analysis in frequency domain is based on work of Joseph Fourier
Chapter 4 The Fourier Series and Fourier Transform
 Chapter 4 The Fourier Series and Fourier Transform Fourier Series Representation of Periodic Signals Let x(t) be a CT periodic signal with period T, i.e., xt ( + T) = xt ( ), t R Example: the rectangular
Chapter 4 The Fourier Series and Fourier Transform Fourier Series Representation of Periodic Signals Let x(t) be a CT periodic signal with period T, i.e., xt ( + T) = xt ( ), t R Example: the rectangular
Chapter 4 The Fourier Series and Fourier Transform
 Chapter 4 The Fourier Series and Fourier Transform Representation of Signals in Terms of Frequency Components Consider the CT signal defined by N xt () = Acos( ω t+ θ ), t k = 1 k k k The frequencies `present
Chapter 4 The Fourier Series and Fourier Transform Representation of Signals in Terms of Frequency Components Consider the CT signal defined by N xt () = Acos( ω t+ θ ), t k = 1 k k k The frequencies `present
CISE-301: Numerical Methods Topic 1:
 CISE-3: Numerical Methods Topic : Introduction to Numerical Methods and Taylor Series Lectures -4: KFUPM Term 9 Section 8 CISE3_Topic KFUPM - T9 - Section 8 Lecture Introduction to Numerical Methods What
CISE-3: Numerical Methods Topic : Introduction to Numerical Methods and Taylor Series Lectures -4: KFUPM Term 9 Section 8 CISE3_Topic KFUPM - T9 - Section 8 Lecture Introduction to Numerical Methods What
The Discrete-Time Fourier
 Chapter 3 The Discrete-Time Fourier Transform 清大電機系林嘉文 cwlin@ee.nthu.edu.tw 03-5731152 Original PowerPoint slides prepared by S. K. Mitra 3-1-1 Continuous-Time Fourier Transform Definition The CTFT of
Chapter 3 The Discrete-Time Fourier Transform 清大電機系林嘉文 cwlin@ee.nthu.edu.tw 03-5731152 Original PowerPoint slides prepared by S. K. Mitra 3-1-1 Continuous-Time Fourier Transform Definition The CTFT of
Chapter 6: Applications of Fourier Representation Houshou Chen
 Chapter 6: Applications of Fourier Representation Houshou Chen Dept. of Electrical Engineering, National Chung Hsing University E-mail: houshou@ee.nchu.edu.tw H.S. Chen Chapter6: Applications of Fourier
Chapter 6: Applications of Fourier Representation Houshou Chen Dept. of Electrical Engineering, National Chung Hsing University E-mail: houshou@ee.nchu.edu.tw H.S. Chen Chapter6: Applications of Fourier
ECE 301 Fall 2011 Division 1. Homework 1 Solutions.
 ECE 3 Fall 2 Division. Homework Solutions. Reading: Course information handout on the course website; textbook sections.,.,.2,.3,.4; online review notes on complex numbers. Problem. For each discrete-time
ECE 3 Fall 2 Division. Homework Solutions. Reading: Course information handout on the course website; textbook sections.,.,.2,.3,.4; online review notes on complex numbers. Problem. For each discrete-time
Frequency-domain representation of discrete-time signals
 4 Frequency-domain representation of discrete-time signals So far we have been looing at signals as a function of time or an index in time. Just lie continuous-time signals, we can view a time signal as
4 Frequency-domain representation of discrete-time signals So far we have been looing at signals as a function of time or an index in time. Just lie continuous-time signals, we can view a time signal as
EE301 Signals and Systems In-Class Exam Exam 3 Thursday, Apr. 19, Cover Sheet
 EE301 Signals and Systems In-Class Exam Exam 3 Thursday, Apr. 19, 2012 Cover Sheet Test Duration: 75 minutes. Coverage: Chaps. 5,7 Open Book but Closed Notes. One 8.5 in. x 11 in. crib sheet Calculators
EE301 Signals and Systems In-Class Exam Exam 3 Thursday, Apr. 19, 2012 Cover Sheet Test Duration: 75 minutes. Coverage: Chaps. 5,7 Open Book but Closed Notes. One 8.5 in. x 11 in. crib sheet Calculators
3.2 Complex Sinusoids and Frequency Response of LTI Systems
 3. Introduction. A signal can be represented as a weighted superposition of complex sinusoids. x(t) or x[n]. LTI system: LTI System Output = A weighted superposition of the system response to each complex
3. Introduction. A signal can be represented as a weighted superposition of complex sinusoids. x(t) or x[n]. LTI system: LTI System Output = A weighted superposition of the system response to each complex
Feedback Linearization
 Feedback Linearization Peter Al Hokayem and Eduardo Gallestey May 14, 2015 1 Introduction Consider a class o single-input-single-output (SISO) nonlinear systems o the orm ẋ = (x) + g(x)u (1) y = h(x) (2)
Feedback Linearization Peter Al Hokayem and Eduardo Gallestey May 14, 2015 1 Introduction Consider a class o single-input-single-output (SISO) nonlinear systems o the orm ẋ = (x) + g(x)u (1) y = h(x) (2)
Z-Transform. The Z-transform is the Discrete-Time counterpart of the Laplace Transform. Laplace : G(s) = g(t)e st dt. Z : G(z) =
 = g(t)e st dt. Z : G(z) =") Z-Transform The Z-transform is the Discrete-Time counterpart of the Laplace Transform. Laplace : G(s) = Z : G(z) = It is Used in Digital Signal Processing n= g(t)e st dt g[n]z n Used to Define Frequency
Z-Transform The Z-transform is the Discrete-Time counterpart of the Laplace Transform. Laplace : G(s) = Z : G(z) = It is Used in Digital Signal Processing n= g(t)e st dt g[n]z n Used to Define Frequency
Supplementary material for Continuous-action planning for discounted infinite-horizon nonlinear optimal control with Lipschitz values
 Supplementary material or Continuous-action planning or discounted ininite-horizon nonlinear optimal control with Lipschitz values List o main notations x, X, u, U state, state space, action, action space,
Supplementary material or Continuous-action planning or discounted ininite-horizon nonlinear optimal control with Lipschitz values List o main notations x, X, u, U state, state space, action, action space,
EE123 Digital Signal Processing
 EE123 Digital Signal Processing Discrete Time Fourier Transform M. Lustig, EECS UC Berkeley A couple of things Read Ch 2 2.0-2.9 It s OK to use 2nd edition Class webcast in bcourses.berkeley.edu or linked
EE123 Digital Signal Processing Discrete Time Fourier Transform M. Lustig, EECS UC Berkeley A couple of things Read Ch 2 2.0-2.9 It s OK to use 2nd edition Class webcast in bcourses.berkeley.edu or linked
Telescoping Decomposition Method for Solving First Order Nonlinear Differential Equations
 Telescoping Decomposition Method or Solving First Order Nonlinear Dierential Equations 1 Mohammed Al-Reai 2 Maysem Abu-Dalu 3 Ahmed Al-Rawashdeh Abstract The Telescoping Decomposition Method TDM is a new
Telescoping Decomposition Method or Solving First Order Nonlinear Dierential Equations 1 Mohammed Al-Reai 2 Maysem Abu-Dalu 3 Ahmed Al-Rawashdeh Abstract The Telescoping Decomposition Method TDM is a new
Signals & Linear Systems Analysis Chapter 2&3, Part II
 Signals & Linear Systems Analysis Chapter &3, Part II Dr. Yun Q. Shi Dept o Electrical & Computer Engr. New Jersey Institute o echnology Email: shi@njit.edu et used or the course:
Signals & Linear Systems Analysis Chapter &3, Part II Dr. Yun Q. Shi Dept o Electrical & Computer Engr. New Jersey Institute o echnology Email: shi@njit.edu et used or the course:
EE123 Digital Signal Processing
 Announcements EE Digital Signal Processing otes posted HW due Friday SDR give away Today! Read Ch 9 $$$ give me your names Lecture based on slides by JM Kahn M Lustig, EECS UC Berkeley M Lustig, EECS UC
Announcements EE Digital Signal Processing otes posted HW due Friday SDR give away Today! Read Ch 9 $$$ give me your names Lecture based on slides by JM Kahn M Lustig, EECS UC Berkeley M Lustig, EECS UC
Frequency-Domain C/S of LTI Systems
 Frequency-Domain C/S of LTI Systems x(n) LTI y(n) LTI: Linear Time-Invariant system h(n), the impulse response of an LTI systems describes the time domain c/s. H(ω), the frequency response describes the
Frequency-Domain C/S of LTI Systems x(n) LTI y(n) LTI: Linear Time-Invariant system h(n), the impulse response of an LTI systems describes the time domain c/s. H(ω), the frequency response describes the
Flash File. Module 3 : Sampling and Reconstruction Lecture 28 : Discrete time Fourier transform and its Properties. Objectives: Scope of this Lecture:
 Module 3 : Sampling and Reconstruction Lecture 28 : Discrete time Fourier transform and its Properties Objectives: Scope of this Lecture: In the previous lecture we defined digital signal processing and
Module 3 : Sampling and Reconstruction Lecture 28 : Discrete time Fourier transform and its Properties Objectives: Scope of this Lecture: In the previous lecture we defined digital signal processing and
8.4 Inverse Functions
 Section 8. Inverse Functions 803 8. Inverse Functions As we saw in the last section, in order to solve application problems involving eponential unctions, we will need to be able to solve eponential equations
Section 8. Inverse Functions 803 8. Inverse Functions As we saw in the last section, in order to solve application problems involving eponential unctions, we will need to be able to solve eponential equations
Stability Condition in Terms of the Pole Locations
 Stability Condition in Terms of the Pole Locations A causal LTI digital filter is BIBO stable if and only if its impulse response h[n] is absolutely summable, i.e., 1 = S h [ n] < n= We now develop a stability
Stability Condition in Terms of the Pole Locations A causal LTI digital filter is BIBO stable if and only if its impulse response h[n] is absolutely summable, i.e., 1 = S h [ n] < n= We now develop a stability
Fourier Analysis and Spectral Representation of Signals
 MIT 6.02 DRAFT Lecture Notes Last update: April 11, 2012 Comments, questions or bug reports? Please contact verghese at mit.edu CHAPTER 13 Fourier Analysis and Spectral Representation of Signals We have
MIT 6.02 DRAFT Lecture Notes Last update: April 11, 2012 Comments, questions or bug reports? Please contact verghese at mit.edu CHAPTER 13 Fourier Analysis and Spectral Representation of Signals We have
Lecture 13: Discrete Time Fourier Transform (DTFT)
") Lecture 13: Discrete Time Fourier Transform (DTFT) ECE 401: Signal and Image Analysis University of Illinois 3/9/2017 1 Sampled Systems Review 2 DTFT and Convolution 3 Inverse DTFT 4 Ideal Lowpass Filter
Lecture 13: Discrete Time Fourier Transform (DTFT) ECE 401: Signal and Image Analysis University of Illinois 3/9/2017 1 Sampled Systems Review 2 DTFT and Convolution 3 Inverse DTFT 4 Ideal Lowpass Filter
The concept of limit
 Roberto s Notes on Dierential Calculus Chapter 1: Limits and continuity Section 1 The concept o limit What you need to know already: All basic concepts about unctions. What you can learn here: What limits
Roberto s Notes on Dierential Calculus Chapter 1: Limits and continuity Section 1 The concept o limit What you need to know already: All basic concepts about unctions. What you can learn here: What limits
EE123 Digital Signal Processing
 EE123 Digital Signal Processing Lecture 2B D. T. Fourier Transform M. Lustig, EECS UC Berkeley Something Fun gotenna http://www.gotenna.com/# Text messaging radio Bluetooth phone interface MURS VHF radio
EE123 Digital Signal Processing Lecture 2B D. T. Fourier Transform M. Lustig, EECS UC Berkeley Something Fun gotenna http://www.gotenna.com/# Text messaging radio Bluetooth phone interface MURS VHF radio
Let H(z) = P(z)/Q(z) be the system function of a rational form. Let us represent both P(z) and Q(z) as polynomials of z (not z -1 )
 = P(z)/Q(z) be the system function of a rational form. Let us represent both P(z) and Q(z) as polynomials of z (not z -1 )") Review: Poles and Zeros of Fractional Form Let H() = P()/Q() be the system function of a rational form. Let us represent both P() and Q() as polynomials of (not - ) Then Poles: the roots of Q()=0 Zeros:
Review: Poles and Zeros of Fractional Form Let H() = P()/Q() be the system function of a rational form. Let us represent both P() and Q() as polynomials of (not - ) Then Poles: the roots of Q()=0 Zeros:
9.3 Graphing Functions by Plotting Points, The Domain and Range of Functions
 9. Graphing Functions by Plotting Points, The Domain and Range o Functions Now that we have a basic idea o what unctions are and how to deal with them, we would like to start talking about the graph o
9. Graphing Functions by Plotting Points, The Domain and Range o Functions Now that we have a basic idea o what unctions are and how to deal with them, we would like to start talking about the graph o
Representing a Signal
 The Fourier Series Representing a Signal The convolution method for finding the response of a system to an excitation takes advantage of the linearity and timeinvariance of the system and represents the
The Fourier Series Representing a Signal The convolution method for finding the response of a system to an excitation takes advantage of the linearity and timeinvariance of the system and represents the
UNIT 1. SIGNALS AND SYSTEM
 Page no: 1 UNIT 1. SIGNALS AND SYSTEM INTRODUCTION A SIGNAL is defined as any physical quantity that changes with time, distance, speed, position, pressure, temperature or some other quantity. A SIGNAL
Page no: 1 UNIT 1. SIGNALS AND SYSTEM INTRODUCTION A SIGNAL is defined as any physical quantity that changes with time, distance, speed, position, pressure, temperature or some other quantity. A SIGNAL
MHF 4U Unit 7: Combining Functions May 29, Review Solutions
 MHF 4U Unit 7: Combining Functions May 9, 008. Review Solutions Use the ollowing unctions to answer questions 5, ( ) g( ), h( ) sin, w {(, ), (3, ), (4, 7)}, r, and l ) log ( ) + (, ) Determine: a) + w
MHF 4U Unit 7: Combining Functions May 9, 008. Review Solutions Use the ollowing unctions to answer questions 5, ( ) g( ), h( ) sin, w {(, ), (3, ), (4, 7)}, r, and l ) log ( ) + (, ) Determine: a) + w
ELEN E4810: Digital Signal Processing Topic 11: Continuous Signals. 1. Sampling and Reconstruction 2. Quantization
 ELEN E4810: Digital Signal Processing Topic 11: Continuous Signals 1. Sampling and Reconstruction 2. Quantization 1 1. Sampling & Reconstruction DSP must interact with an analog world: A to D D to A x(t)
ELEN E4810: Digital Signal Processing Topic 11: Continuous Signals 1. Sampling and Reconstruction 2. Quantization 1 1. Sampling & Reconstruction DSP must interact with an analog world: A to D D to A x(t)
Theorem Let J and f be as in the previous theorem. Then for any w 0 Int(J), f(z) (z w 0 ) n+1
, f(z) (z w 0 ) n+1") (w) Second, since lim z w z w z w δ. Thus, i r δ, then z w =r (w) z w = (w), there exist δ, M > 0 such that (w) z w M i dz ML({ z w = r}) = M2πr, which tends to 0 as r 0. This shows that g = 2πi(w), which
(w) Second, since lim z w z w z w δ. Thus, i r δ, then z w =r (w) z w = (w), there exist δ, M > 0 such that (w) z w M i dz ML({ z w = r}) = M2πr, which tends to 0 as r 0. This shows that g = 2πi(w), which
2. ETA EVALUATIONS USING WEBER FUNCTIONS. Introduction
 . ETA EVALUATIONS USING WEBER FUNCTIONS Introduction So ar we have seen some o the methods or providing eta evaluations that appear in the literature and we have seen some o the interesting properties
. ETA EVALUATIONS USING WEBER FUNCTIONS Introduction So ar we have seen some o the methods or providing eta evaluations that appear in the literature and we have seen some o the interesting properties
CHAPTER 4 FOURIER SERIES S A B A R I N A I S M A I L
 CHAPTER 4 FOURIER SERIES 1 S A B A R I N A I S M A I L Outline Introduction of the Fourier series. The properties of the Fourier series. Symmetry consideration Application of the Fourier series to circuit
CHAPTER 4 FOURIER SERIES 1 S A B A R I N A I S M A I L Outline Introduction of the Fourier series. The properties of the Fourier series. Symmetry consideration Application of the Fourier series to circuit
Standing Waves If the same type of waves move through a common region and their frequencies, f, are the same then so are their wavelengths, λ.
 Standing Waves I the same type o waves move through a common region and their requencies,, are the same then so are their wavelengths,. This ollows rom: v=. Since the waves move through a common region,
Standing Waves I the same type o waves move through a common region and their requencies,, are the same then so are their wavelengths,. This ollows rom: v=. Since the waves move through a common region,
Discrete-Time Signals: Time-Domain Representation
 Discrete-Time Signals: Time-Domain Representation 1 Signals represented as sequences of numbers, called samples Sample value of a typical signal or sequence denoted as x[n] with n being an integer in the
Discrete-Time Signals: Time-Domain Representation 1 Signals represented as sequences of numbers, called samples Sample value of a typical signal or sequence denoted as x[n] with n being an integer in the
Radar Systems Engineering Lecture 3 Review of Signals, Systems and Digital Signal Processing
 Radar Systems Engineering Lecture Review of Signals, Systems and Digital Signal Processing Dr. Robert M. O Donnell Guest Lecturer Radar Systems Course Review Signals, Systems & DSP // Block Diagram of
Radar Systems Engineering Lecture Review of Signals, Systems and Digital Signal Processing Dr. Robert M. O Donnell Guest Lecturer Radar Systems Course Review Signals, Systems & DSP // Block Diagram of
arxiv: v2 [math.co] 29 Mar 2017
![arxiv: v2 [math.co] 29 Mar 2017](/thumbs/92/108462179.jpg "arxiv: v2 [math.co] 29 Mar 2017") COMBINATORIAL IDENTITIES FOR GENERALIZED STIRLING NUMBERS EXPANDING -FACTORIAL FUNCTIONS AND THE -HARMONIC NUMBERS MAXIE D. SCHMIDT arxiv:6.04708v2 [math.co 29 Mar 207 SCHOOL OF MATHEMATICS GEORGIA INSTITUTE
COMBINATORIAL IDENTITIES FOR GENERALIZED STIRLING NUMBERS EXPANDING -FACTORIAL FUNCTIONS AND THE -HARMONIC NUMBERS MAXIE D. SCHMIDT arxiv:6.04708v2 [math.co 29 Mar 207 SCHOOL OF MATHEMATICS GEORGIA INSTITUTE
Maximum Flow. Reading: CLRS Chapter 26. CSE 6331 Algorithms Steve Lai
 Maximum Flow Reading: CLRS Chapter 26. CSE 6331 Algorithms Steve Lai Flow Network A low network G ( V, E) is a directed graph with a source node sv, a sink node tv, a capacity unction c. Each edge ( u,
Maximum Flow Reading: CLRS Chapter 26. CSE 6331 Algorithms Steve Lai Flow Network A low network G ( V, E) is a directed graph with a source node sv, a sink node tv, a capacity unction c. Each edge ( u,
Lecture 4: FT Pairs, Random Signals and z-transform
 EE518 Digital Signal Processing University of Washington Autumn 2001 Dept. of Electrical Engineering Lecture 4: T Pairs, Rom Signals z-transform Wed., Oct. 10, 2001 Prof: J. Bilmes
EE518 Digital Signal Processing University of Washington Autumn 2001 Dept. of Electrical Engineering Lecture 4: T Pairs, Rom Signals z-transform Wed., Oct. 10, 2001 Prof: J. Bilmes
Discrete Time Rect Function(4B)
") Discrete Time Rect Function(4B) Discrete Time Rect Functions Copyright (c) 29-213 Young W. Lim. Permission is granted to copy, distribute and/or modify this document under the terms of the GNU Free Documentation
Discrete Time Rect Function(4B) Discrete Time Rect Functions Copyright (c) 29-213 Young W. Lim. Permission is granted to copy, distribute and/or modify this document under the terms of the GNU Free Documentation
Discrete-Time Fourier Transform (DTFT)
") Connexions module: m047 Discrete-Time Fourier Transorm DTFT) Don Johnson This work is produced by The Connexions Project and licensed under the Creative Commons Attribution License Abstract Discussion
Connexions module: m047 Discrete-Time Fourier Transorm DTFT) Don Johnson This work is produced by The Connexions Project and licensed under the Creative Commons Attribution License Abstract Discussion
Contents. Signals as functions (1D, 2D)
") Fourier Transform The idea A signal can be interpreted as en electromagnetic wave. This consists of lights of different color, or frequency, that can be split apart usign an optic prism. Each component
Fourier Transform The idea A signal can be interpreted as en electromagnetic wave. This consists of lights of different color, or frequency, that can be split apart usign an optic prism. Each component
EECE 301 Signals & Systems Prof. Mark Fowler
 EECE 30 Signals & Systems Prof. Mark Fowler Note Set #26 D-T Systems: Transfer Function and Frequency Response / Finding the Transfer Function from Difference Eq. Recall: we found a DT system s freq. resp.
EECE 30 Signals & Systems Prof. Mark Fowler Note Set #26 D-T Systems: Transfer Function and Frequency Response / Finding the Transfer Function from Difference Eq. Recall: we found a DT system s freq. resp.
Fourier Analysis and Spectral Representation of Signals
 MIT 6.02 DRAFT Lecture Notes Last update: November 3, 2012 CHAPTER 13 Fourier Analysis and Spectral Representation of Signals We have seen in the previous chapter that the action of an LTI system on a
MIT 6.02 DRAFT Lecture Notes Last update: November 3, 2012 CHAPTER 13 Fourier Analysis and Spectral Representation of Signals We have seen in the previous chapter that the action of an LTI system on a
Contents. Signals as functions (1D, 2D)
") Fourier Transform The idea A signal can be interpreted as en electromagnetic wave. This consists of lights of different color, or frequency, that can be split apart usign an optic prism. Each component
Fourier Transform The idea A signal can be interpreted as en electromagnetic wave. This consists of lights of different color, or frequency, that can be split apart usign an optic prism. Each component
Chapter 2: The Fourier Transform
 EEE, EEE Part A : Digital Signal Processing Chapter Chapter : he Fourier ransform he Fourier ransform. Introduction he sampled Fourier transform of a periodic, discrete-time signal is nown as the discrete
EEE, EEE Part A : Digital Signal Processing Chapter Chapter : he Fourier ransform he Fourier ransform. Introduction he sampled Fourier transform of a periodic, discrete-time signal is nown as the discrete
信號與系統 Signals and Systems
 Spring 2013 Flowchart Introduction (Chap 1) LTI & Convolution (Chap 2) NTUEE-SS10-Z-2 信號與系統 Signals and Systems Chapter SS-10 The z-transform FS (Chap 3) Periodic Bounded/Convergent CT DT FT Aperiodic
Spring 2013 Flowchart Introduction (Chap 1) LTI & Convolution (Chap 2) NTUEE-SS10-Z-2 信號與系統 Signals and Systems Chapter SS-10 The z-transform FS (Chap 3) Periodic Bounded/Convergent CT DT FT Aperiodic
Chapter 4 Discrete Fourier Transform (DFT) And Signal Spectrum
 And Signal Spectrum") Chapter 4 Discrete Fourier Transform (DFT) And Signal Spectrum CEN352, DR. Nassim Ammour, King Saud University 1 Fourier Transform History Born 21 March 1768 ( Auxerre ). Died 16 May 1830 ( Paris ) French
Chapter 4 Discrete Fourier Transform (DFT) And Signal Spectrum CEN352, DR. Nassim Ammour, King Saud University 1 Fourier Transform History Born 21 March 1768 ( Auxerre ). Died 16 May 1830 ( Paris ) French
Discrete-Time Signals: Time-Domain Representation
 Discrete-Time Signals: Time-Domain Representation 1 Signals represented as sequences of numbers, called samples Sample value of a typical signal or sequence denoted as x[n] with n being an integer in the
Discrete-Time Signals: Time-Domain Representation 1 Signals represented as sequences of numbers, called samples Sample value of a typical signal or sequence denoted as x[n] with n being an integer in the
Digital Signal Processing Lecture 3 - Discrete-Time Systems
 Digital Signal Processing - Discrete-Time Systems Electrical Engineering and Computer Science University of Tennessee, Knoxville August 25, 2015 Overview 1 2 3 4 5 6 7 8 Introduction Three components of
Digital Signal Processing - Discrete-Time Systems Electrical Engineering and Computer Science University of Tennessee, Knoxville August 25, 2015 Overview 1 2 3 4 5 6 7 8 Introduction Three components of
Contents. Signals as functions (1D, 2D)
") Fourier Transform The idea A signal can be interpreted as en electromagnetic wave. This consists of lights of different color, or frequency, that can be split apart usign an optic prism. Each component
Fourier Transform The idea A signal can be interpreted as en electromagnetic wave. This consists of lights of different color, or frequency, that can be split apart usign an optic prism. Each component
Image Enhancement (Spatial Filtering 2)
") Image Enhancement (Spatial Filtering ) Dr. Samir H. Abdul-Jauwad Electrical Engineering Department College o Engineering Sciences King Fahd University o Petroleum & Minerals Dhahran Saudi Arabia samara@kupm.edu.sa
Image Enhancement (Spatial Filtering ) Dr. Samir H. Abdul-Jauwad Electrical Engineering Department College o Engineering Sciences King Fahd University o Petroleum & Minerals Dhahran Saudi Arabia samara@kupm.edu.sa
Discrete Time Rect Function(4B)
") Discrete Time Rect Function(4B) Discrete Time Rect Functions Copyright (c) 29-23 Young W. Lim. Permission is granted to copy, distribute and/or modify this document under the terms of the GNU Free Documentation
Discrete Time Rect Function(4B) Discrete Time Rect Functions Copyright (c) 29-23 Young W. Lim. Permission is granted to copy, distribute and/or modify this document under the terms of the GNU Free Documentation
Online Appendix: The Continuous-type Model of Competitive Nonlinear Taxation and Constitutional Choice by Massimo Morelli, Huanxing Yang, and Lixin Ye
 Online Appendix: The Continuous-type Model o Competitive Nonlinear Taxation and Constitutional Choice by Massimo Morelli, Huanxing Yang, and Lixin Ye For robustness check, in this section we extend our
Online Appendix: The Continuous-type Model o Competitive Nonlinear Taxation and Constitutional Choice by Massimo Morelli, Huanxing Yang, and Lixin Ye For robustness check, in this section we extend our
BANDELET IMAGE APPROXIMATION AND COMPRESSION
 BANDELET IMAGE APPOXIMATION AND COMPESSION E. LE PENNEC AND S. MALLAT Abstract. Finding eicient geometric representations o images is a central issue to improve image compression and noise removal algorithms.
BANDELET IMAGE APPOXIMATION AND COMPESSION E. LE PENNEC AND S. MALLAT Abstract. Finding eicient geometric representations o images is a central issue to improve image compression and noise removal algorithms.
! Introduction. ! Discrete Time Signals & Systems. ! Z-Transform. ! Inverse Z-Transform. ! Sampling of Continuous Time Signals
 ESE 531: Digital Signal Processing Lec 25: April 24, 2018 Review Course Content! Introduction! Discrete Time Signals & Systems! Discrete Time Fourier Transform! Z-Transform! Inverse Z-Transform! Sampling
ESE 531: Digital Signal Processing Lec 25: April 24, 2018 Review Course Content! Introduction! Discrete Time Signals & Systems! Discrete Time Fourier Transform! Z-Transform! Inverse Z-Transform! Sampling
Numerical Methods - Lecture 2. Numerical Methods. Lecture 2. Analysis of errors in numerical methods
 Numerical Methods - Lecture 1 Numerical Methods Lecture. Analysis o errors in numerical methods Numerical Methods - Lecture Why represent numbers in loating point ormat? Eample 1. How a number 56.78 can
Numerical Methods - Lecture 1 Numerical Methods Lecture. Analysis o errors in numerical methods Numerical Methods - Lecture Why represent numbers in loating point ormat? Eample 1. How a number 56.78 can
A Fourier Transform Model in Excel #1
 A Fourier Transorm Model in Ecel # -This is a tutorial about the implementation o a Fourier transorm in Ecel. This irst part goes over adjustments in the general Fourier transorm ormula to be applicable
A Fourier Transorm Model in Ecel # -This is a tutorial about the implementation o a Fourier transorm in Ecel. This irst part goes over adjustments in the general Fourier transorm ormula to be applicable
Rank Lowering Linear Maps and Multiple Dirichlet Series Associated to GL(n, R)
") Pure and Applied Mathematics Quarterly Volume, Number Special Issue: In honor o John H Coates, Part o 6 65, 6 Ran Lowering Linear Maps and Multiple Dirichlet Series Associated to GLn, R Introduction Dorian
Pure and Applied Mathematics Quarterly Volume, Number Special Issue: In honor o John H Coates, Part o 6 65, 6 Ran Lowering Linear Maps and Multiple Dirichlet Series Associated to GLn, R Introduction Dorian
Philadelphia University Faculty of Engineering Communication and Electronics Engineering
 Module: Electronics II Module Number: 6503 Philadelphia University Faculty o Engineering Communication and Electronics Engineering Ampliier Circuits-II BJT and FET Frequency Response Characteristics: -
Module: Electronics II Module Number: 6503 Philadelphia University Faculty o Engineering Communication and Electronics Engineering Ampliier Circuits-II BJT and FET Frequency Response Characteristics: -