EE123 Digital Signal Processing
|
|
|
- Dwain Joseph
- 5 years ago
- Views:
Transcription


1 EE123 Digital Signal Processing Lecture 2B D. T. Fourier Transform M. Lustig, EECS UC Berkeley
 https://www.youtube.com/watch?")
2 Something Fun gotenna Text messaging radio Bluetooth phone interface MURS VHF radio or 900MHz ISM 2W (VHF), 1W (900MHz) mile range encryption, mesh networking 2 for 150$ Lab 6 implements a similar approach -- (without the slick system integration) M. Lustig, EECS UC Berkeley
3 Discrete-Time LTI Systems The impulse response h[n] completely characterizes an LTI system DNA of LTI [n] LTI h[n] discrete convolution x[n] LTI y[n] =h[n] x[n] 1X y[n] = h[n m]x[m] N= 1 Sum of weighted, delayed impulse responses! M. Lustig, EECS UC Berkeley
4 BIBO Stability of LTI Systems An LTI system is BIBO stable iff h[n] is absolutely summable 1X k= 1 h[k] < 1 M. Lustig, EECS UC Berkeley
5 BIBO Stability of LTI Systems Proof: if y[n] = apple 1X h[k]x[n k] k= 1 1X k= 1 h[k] x[n k] apple B x apple B x 1 X k= 1 h[k] < 1 M. Lustig, EECS UC Berkeley
6 BIBO Stability of LTI Systems Proof: only if P 1 k= 1 h[k] = 1 suppose show that there exists bounded x[n] that gives unbounded y[n] Let: M. Lustig, EECS UC Berkeley
= x[n] = 1 Alternative 2 1X k= 1 Z X(f) = x[n] = x[k]e j!")
e j2 fn df Why one is sum and the other")
7 Discrete-Time Fourier Transform (DTFT) X(e j! )= x[n] = 1 Alternative 2 1X k= 1 Z X(f) = x[n] = x[k]e j!k X(e j! )e j!n d! 1X k= 1 Z x[k]e j2 fk X(f)e j2 fn df Why one is sum and the other integral? Why use one over the other?
8 Example 1: w[n] window -N N DTFT: W (e j! ) = NX e j!k k= N = e j!n 1+e j! + + e j!2n Recall: 1+p + p p M = 1 pm+1 1 p p = e j! M = 2N
9 Example 1 cont. DTFT:
10 Example 1 cont. DTFT: W (e j! ) = e j!n 1+e j! + + e j!2n = e jwn 1 ei!(2n+1) 1+e j! = e j!n e j!n e j! 1 e j! = e j!(n+ 1 2 ) e j!(n+ 1 2 ) e j! 2 e j! 2 = sin[(n )!] sin(! 2 ) j - periodic sinc e j! 2 e j! 2
11 Example 1 cont. W (e j! )= sin[(n )!] sin(! 2 ) also, Σx[n]! (2N + 1) as!! 0 from l Hôpital 2N +1 N =1, why?
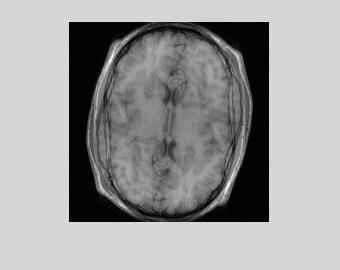
12 Properties of the DTFT Periodicity: X(e j(!+2 ) )=X(e j! ) Conjugate Symmetry: X (e j! )=X(e j! ) if x[n] is real Re X(e j! ) = Re X(e j! ) Im X(e j! ) = Im X(e j! ) Big deal for: MRI, Communications, more...
 Image Complete")

13 Half Fourier Imaging in MR k-space (Raw Data) Image Complete based on conjugate symmetry Half the Scan time! Discrete Fourier transform
14 SSB Modulation Real Baseband signal has conjugate symmetric spectrum m[n] cos(! 0 n) AM modulation (DSB-SC)!! Single sideband (USB) half bandwidth!
15 SSB Amateur radio on shortwaves often use SSB modulation Example: Websdr
16 Properties of the DTFT cont. Time-Reversal x[n] $ X(e i! ) x[ n] $ X(e i! ) = X (e j! ) if x[n] 2Real If x[n] = x[-n] and x[n] is real, then: X(e j! ) = X (e j! )! X(e j! ) 2Real
17 Q: Suppose: x[n] $ X(e j! )? $ Re X(e j! ) A: Decompose x[n] to even and odd functions x[n] =x e [n]+x o [n] x e [n] := 1 2 x o [n] := 1 2 (x[n]+x[ n]) (x[n] x[ n]) x e [n]+x o [n]!re X(e j! ) + jim X(e j! )
18 Oops!
19 Properties of the DTFT cont. Time-Freq Shifting/modulation: x[n] $ X(e j! ) Good for MRI! Why x[n n d ] $ e j!n d X(e j! ) e j! 0n x[n] $ X(e j(!! o) )
20 Example 2 What is the DTFT of: 5 High Pass Filter 2N +1= e j n See 2.9 for more properties
21 Frequency Response of LTI Systems Check response to a pure frequency: e i!n 0 LTI y[n] y[n] = = 1X k= 1 0 1X k= 1 h[k]e j!(n k) h[k]e j!k C {z } 0 1 A ej!n 0 0 H e j!!=! 0
22 Frequency Response of LTI Systems Check response to a pure frequency: e i!n 0 LTI y[n] H(e j! )=DTFT{h[n]} y[n] =H e j!!=! 0 e j! 0n Output is the same pure frequency, scaled and phase-shifted! e j! 0n is an eigen function of LTI systems Recall eigen vectors satisfy: A =
23 Example 3 Frequency response of a causal moving average filter y[n] = x[n M]+ + x[n] M +1 Q: What type of filter is it? A: Low-Pass 1 M +1 0 M h[n] = 1 M +1 w[n n M 2 ]
24 Example 3 Cont. Frequency response of a causal moving average filter h[n] = 1 M +1 w[n M 2 ] Same as example 1, only: Shifted by N, divided by M+1, M=2N H(e j! )= e j! M 2 M +1 sin ( M )! sin(! 2 )
25 Example 3 Cont. Frequency response of a causal moving average filter H(e j! )= e j! M 2 M +1 sin ( M 2 + 1)! sin(! 2 ) Not a sinc! 1 H(e j! ) 3 \H(e j! )
26 Example 4: Impulse Response of an Ideal Low-Pass Filter H 1 LP (e j! )! c! c h LP [n] = 1 2 = 1 2 Z Z!c H LP (e jw )e j!n d!! c e j!n d!
27 Example 4 Impulse Response of an Ideal Low-Pass Filter Z h LP [n] = 1 2 = 1 2 Z!c H LP (e jw )e j!n d!! c e j!n d! = 1 2 jn ej!n! c! c =2j sin(w c n) = sin(w cn) n
28 Example 4 Impulse Response of an Ideal Low-Pass Filter h LP [n] = sin(w cn) n sampled sinc h LP [n] Non causal! Truncate and shift right to make causal
29 Example 4 Impulse Response of an Ideal Low-Pass Filter Non causal! Truncate and shift right to make causal How does it changes the frequency response? Truncation: h LP [n] =w N [n] h LP [n] property 2.9.7: H LP (e j! )= 1 2 Z H LP (e j )W (e j(! ) )d Periodic convolution
30 Example 4 We get smearing of the frequency response We get rippling ω real imag
EE123 Digital Signal Processing
 EE123 Digital Signal Processing Discrete Time Fourier Transform M. Lustig, EECS UC Berkeley A couple of things Read Ch 2 2.0-2.9 It s OK to use 2nd edition Class webcast in bcourses.berkeley.edu or linked
EE123 Digital Signal Processing Discrete Time Fourier Transform M. Lustig, EECS UC Berkeley A couple of things Read Ch 2 2.0-2.9 It s OK to use 2nd edition Class webcast in bcourses.berkeley.edu or linked
EE123 Digital Signal Processing
 EE123 Digital Signal Processing Lecture 2A D.T Systems D. T. Fourier Transform A couple of things Read Ch 2 2.0-2.9 It s OK to use 2nd edition My office hours: posted on-line W 4-5pm Cory 506 ham radio
EE123 Digital Signal Processing Lecture 2A D.T Systems D. T. Fourier Transform A couple of things Read Ch 2 2.0-2.9 It s OK to use 2nd edition My office hours: posted on-line W 4-5pm Cory 506 ham radio
EE123 Digital Signal Processing. M. Lustig, EECS UC Berkeley
 EE123 Digital Signal Processing Today Last time: DTFT - Ch 2 Today: Continue DTFT Z-Transform Ch. 3 Properties of the DTFT cont. Time-Freq Shifting/modulation: M. Lustig, EE123 UCB M. Lustig, EE123 UCB
EE123 Digital Signal Processing Today Last time: DTFT - Ch 2 Today: Continue DTFT Z-Transform Ch. 3 Properties of the DTFT cont. Time-Freq Shifting/modulation: M. Lustig, EE123 UCB M. Lustig, EE123 UCB
EE123 Digital Signal Processing
 EE123 Digital Signal Processing Lecture 2 Discrete Time Systems Today Last time: Administration Overview Announcement: HW1 will be out today Lab 0 out webcast out Today: Ch. 2 - Discrete-Time Signals and
EE123 Digital Signal Processing Lecture 2 Discrete Time Systems Today Last time: Administration Overview Announcement: HW1 will be out today Lab 0 out webcast out Today: Ch. 2 - Discrete-Time Signals and
Digital Signal Processing Lecture 3 - Discrete-Time Systems
 Digital Signal Processing - Discrete-Time Systems Electrical Engineering and Computer Science University of Tennessee, Knoxville August 25, 2015 Overview 1 2 3 4 5 6 7 8 Introduction Three components of
Digital Signal Processing - Discrete-Time Systems Electrical Engineering and Computer Science University of Tennessee, Knoxville August 25, 2015 Overview 1 2 3 4 5 6 7 8 Introduction Three components of
Digital Signal Processing Lecture 4
 Remote Sensing Laboratory Dept. of Information Engineering and Computer Science University of Trento Via Sommarive, 14, I-38123 Povo, Trento, Italy Digital Signal Processing Lecture 4 Begüm Demir E-mail:
Remote Sensing Laboratory Dept. of Information Engineering and Computer Science University of Trento Via Sommarive, 14, I-38123 Povo, Trento, Italy Digital Signal Processing Lecture 4 Begüm Demir E-mail:
Let H(z) = P(z)/Q(z) be the system function of a rational form. Let us represent both P(z) and Q(z) as polynomials of z (not z -1 )
 = P(z)/Q(z) be the system function of a rational form. Let us represent both P(z) and Q(z) as polynomials of z (not z -1 )") Review: Poles and Zeros of Fractional Form Let H() = P()/Q() be the system function of a rational form. Let us represent both P() and Q() as polynomials of (not - ) Then Poles: the roots of Q()=0 Zeros:
Review: Poles and Zeros of Fractional Form Let H() = P()/Q() be the system function of a rational form. Let us represent both P() and Q() as polynomials of (not - ) Then Poles: the roots of Q()=0 Zeros:
Linear Convolution Using FFT
 Linear Convolution Using FFT Another useful property is that we can perform circular convolution and see how many points remain the same as those of linear convolution. When P < L and an L-point circular
Linear Convolution Using FFT Another useful property is that we can perform circular convolution and see how many points remain the same as those of linear convolution. When P < L and an L-point circular
! Circular Convolution. " Linear convolution with circular convolution. ! Discrete Fourier Transform. " Linear convolution through circular
 Previously ESE 531: Digital Signal Processing Lec 22: April 18, 2017 Fast Fourier Transform (con t)! Circular Convolution " Linear convolution with circular convolution! Discrete Fourier Transform " Linear
Previously ESE 531: Digital Signal Processing Lec 22: April 18, 2017 Fast Fourier Transform (con t)! Circular Convolution " Linear convolution with circular convolution! Discrete Fourier Transform " Linear
EE123 Digital Signal Processing
 Announcements EE Digital Signal Processing otes posted HW due Friday SDR give away Today! Read Ch 9 $$$ give me your names Lecture based on slides by JM Kahn M Lustig, EECS UC Berkeley M Lustig, EECS UC
Announcements EE Digital Signal Processing otes posted HW due Friday SDR give away Today! Read Ch 9 $$$ give me your names Lecture based on slides by JM Kahn M Lustig, EECS UC Berkeley M Lustig, EECS UC
How to manipulate Frequencies in Discrete-time Domain? Two Main Approaches
 How to manipulate Frequencies in Discrete-time Domain? Two Main Approaches Difference Equations (an LTI system) x[n]: input, y[n]: output That is, building a system that maes use of the current and previous
How to manipulate Frequencies in Discrete-time Domain? Two Main Approaches Difference Equations (an LTI system) x[n]: input, y[n]: output That is, building a system that maes use of the current and previous
! Introduction. ! Discrete Time Signals & Systems. ! Z-Transform. ! Inverse Z-Transform. ! Sampling of Continuous Time Signals
 ESE 531: Digital Signal Processing Lec 25: April 24, 2018 Review Course Content! Introduction! Discrete Time Signals & Systems! Discrete Time Fourier Transform! Z-Transform! Inverse Z-Transform! Sampling
ESE 531: Digital Signal Processing Lec 25: April 24, 2018 Review Course Content! Introduction! Discrete Time Signals & Systems! Discrete Time Fourier Transform! Z-Transform! Inverse Z-Transform! Sampling
EEL3135: Homework #4
 EEL335: Homework #4 Problem : For each of the systems below, determine whether or not the system is () linear, () time-invariant, and (3) causal: (a) (b) (c) xn [ ] cos( 04πn) (d) xn [ ] xn [ ] xn [ 5]
EEL335: Homework #4 Problem : For each of the systems below, determine whether or not the system is () linear, () time-invariant, and (3) causal: (a) (b) (c) xn [ ] cos( 04πn) (d) xn [ ] xn [ ] xn [ 5]
ESE 531: Digital Signal Processing
 ESE 531: Digital Signal Processing Lec 22: April 10, 2018 Adaptive Filters Penn ESE 531 Spring 2018 Khanna Lecture Outline! Circular convolution as linear convolution with aliasing! Adaptive Filters Penn
ESE 531: Digital Signal Processing Lec 22: April 10, 2018 Adaptive Filters Penn ESE 531 Spring 2018 Khanna Lecture Outline! Circular convolution as linear convolution with aliasing! Adaptive Filters Penn
Lecture 3 January 23
 EE 123: Digital Signal Processing Spring 2007 Lecture 3 January 23 Lecturer: Prof. Anant Sahai Scribe: Dominic Antonelli 3.1 Outline These notes cover the following topics: Eigenvectors and Eigenvalues
EE 123: Digital Signal Processing Spring 2007 Lecture 3 January 23 Lecturer: Prof. Anant Sahai Scribe: Dominic Antonelli 3.1 Outline These notes cover the following topics: Eigenvectors and Eigenvalues
Chap 2. Discrete-Time Signals and Systems
 Digital Signal Processing Chap 2. Discrete-Time Signals and Systems Chang-Su Kim Discrete-Time Signals CT Signal DT Signal Representation 0 4 1 1 1 2 3 Functional representation 1, n 1,3 x[ n] 4, n 2 0,
Digital Signal Processing Chap 2. Discrete-Time Signals and Systems Chang-Su Kim Discrete-Time Signals CT Signal DT Signal Representation 0 4 1 1 1 2 3 Functional representation 1, n 1,3 x[ n] 4, n 2 0,
Review of Fundamentals of Digital Signal Processing
 Chapter 2 Review of Fundamentals of Digital Signal Processing 2.1 (a) This system is not linear (the constant term makes it non linear) but is shift-invariant (b) This system is linear but not shift-invariant
Chapter 2 Review of Fundamentals of Digital Signal Processing 2.1 (a) This system is not linear (the constant term makes it non linear) but is shift-invariant (b) This system is linear but not shift-invariant
EE123 Digital Signal Processing
 EE123 Digital Signal Processing Lecture 1 Time-Dependent FT Announcements! Midterm: 2/22/216 Open everything... but cheat sheet recommended instead 1am-12pm How s the lab going? Frequency Analysis with
EE123 Digital Signal Processing Lecture 1 Time-Dependent FT Announcements! Midterm: 2/22/216 Open everything... but cheat sheet recommended instead 1am-12pm How s the lab going? Frequency Analysis with
Stability Condition in Terms of the Pole Locations
 Stability Condition in Terms of the Pole Locations A causal LTI digital filter is BIBO stable if and only if its impulse response h[n] is absolutely summable, i.e., 1 = S h [ n] < n= We now develop a stability
Stability Condition in Terms of the Pole Locations A causal LTI digital filter is BIBO stable if and only if its impulse response h[n] is absolutely summable, i.e., 1 = S h [ n] < n= We now develop a stability
Discrete-Time Fourier Transform (DTFT)
") Discrete-Time Fourier Transform (DTFT) 1 Preliminaries Definition: The Discrete-Time Fourier Transform (DTFT) of a signal x[n] is defined to be X(e jω ) x[n]e jωn. (1) In other words, the DTFT of x[n]
Discrete-Time Fourier Transform (DTFT) 1 Preliminaries Definition: The Discrete-Time Fourier Transform (DTFT) of a signal x[n] is defined to be X(e jω ) x[n]e jωn. (1) In other words, the DTFT of x[n]
ENT 315 Medical Signal Processing CHAPTER 2 DISCRETE FOURIER TRANSFORM. Dr. Lim Chee Chin
 ENT 315 Medical Signal Processing CHAPTER 2 DISCRETE FOURIER TRANSFORM Dr. Lim Chee Chin Outline Introduction Discrete Fourier Series Properties of Discrete Fourier Series Time domain aliasing due to frequency
ENT 315 Medical Signal Processing CHAPTER 2 DISCRETE FOURIER TRANSFORM Dr. Lim Chee Chin Outline Introduction Discrete Fourier Series Properties of Discrete Fourier Series Time domain aliasing due to frequency
Fall 2011, EE123 Digital Signal Processing
 Lecture 6 Miki Lustig, UCB September 11, 2012 Miki Lustig, UCB DFT and Sampling the DTFT X (e jω ) = e j4ω sin2 (5ω/2) sin 2 (ω/2) 5 x[n] 25 X(e jω ) 4 20 3 15 2 1 0 10 5 1 0 5 10 15 n 0 0 2 4 6 ω 5 reconstructed
Lecture 6 Miki Lustig, UCB September 11, 2012 Miki Lustig, UCB DFT and Sampling the DTFT X (e jω ) = e j4ω sin2 (5ω/2) sin 2 (ω/2) 5 x[n] 25 X(e jω ) 4 20 3 15 2 1 0 10 5 1 0 5 10 15 n 0 0 2 4 6 ω 5 reconstructed
The Johns Hopkins University Department of Electrical and Computer Engineering Introduction to Linear Systems Fall 2002.
 The Johns Hopkins University Department of Electrical and Computer Engineering 505.460 Introduction to Linear Systems Fall 2002 Final exam Name: You are allowed to use: 1. Table 3.1 (page 206) & Table
The Johns Hopkins University Department of Electrical and Computer Engineering 505.460 Introduction to Linear Systems Fall 2002 Final exam Name: You are allowed to use: 1. Table 3.1 (page 206) & Table
LAB 6: FIR Filter Design Summer 2011
 University of Illinois at Urbana-Champaign Department of Electrical and Computer Engineering ECE 311: Digital Signal Processing Lab Chandra Radhakrishnan Peter Kairouz LAB 6: FIR Filter Design Summer 011
University of Illinois at Urbana-Champaign Department of Electrical and Computer Engineering ECE 311: Digital Signal Processing Lab Chandra Radhakrishnan Peter Kairouz LAB 6: FIR Filter Design Summer 011
Frequency-Domain C/S of LTI Systems
 Frequency-Domain C/S of LTI Systems x(n) LTI y(n) LTI: Linear Time-Invariant system h(n), the impulse response of an LTI systems describes the time domain c/s. H(ω), the frequency response describes the
Frequency-Domain C/S of LTI Systems x(n) LTI y(n) LTI: Linear Time-Invariant system h(n), the impulse response of an LTI systems describes the time domain c/s. H(ω), the frequency response describes the
Digital Signal Processing. Midterm 1 Solution
 EE 123 University of California, Berkeley Anant Sahai February 15, 27 Digital Signal Processing Instructions Midterm 1 Solution Total time allowed for the exam is 8 minutes Some useful formulas: Discrete
EE 123 University of California, Berkeley Anant Sahai February 15, 27 Digital Signal Processing Instructions Midterm 1 Solution Total time allowed for the exam is 8 minutes Some useful formulas: Discrete
ELEG 305: Digital Signal Processing
 ELEG 305: Digital Signal Processing Lecture 1: Course Overview; Discrete-Time Signals & Systems Kenneth E. Barner Department of Electrical and Computer Engineering University of Delaware Fall 2008 K. E.
ELEG 305: Digital Signal Processing Lecture 1: Course Overview; Discrete-Time Signals & Systems Kenneth E. Barner Department of Electrical and Computer Engineering University of Delaware Fall 2008 K. E.
Flash File. Module 3 : Sampling and Reconstruction Lecture 28 : Discrete time Fourier transform and its Properties. Objectives: Scope of this Lecture:
 Module 3 : Sampling and Reconstruction Lecture 28 : Discrete time Fourier transform and its Properties Objectives: Scope of this Lecture: In the previous lecture we defined digital signal processing and
Module 3 : Sampling and Reconstruction Lecture 28 : Discrete time Fourier transform and its Properties Objectives: Scope of this Lecture: In the previous lecture we defined digital signal processing and
Ch.11 The Discrete-Time Fourier Transform (DTFT)
") EE2S11 Signals and Systems, part 2 Ch.11 The Discrete-Time Fourier Transform (DTFT Contents definition of the DTFT relation to the -transform, region of convergence, stability frequency plots convolution
EE2S11 Signals and Systems, part 2 Ch.11 The Discrete-Time Fourier Transform (DTFT Contents definition of the DTFT relation to the -transform, region of convergence, stability frequency plots convolution
Digital Signal Processing:
 Digital Signal Processing: Mathematical and algorithmic manipulation of discretized and quantized or naturally digital signals in order to extract the most relevant and pertinent information that is carried
Digital Signal Processing: Mathematical and algorithmic manipulation of discretized and quantized or naturally digital signals in order to extract the most relevant and pertinent information that is carried
( ) John A. Quinn Lecture. ESE 531: Digital Signal Processing. Lecture Outline. Frequency Response of LTI System. Example: Zero on Real Axis
 John A. Quinn Lecture. ESE 531: Digital Signal Processing. Lecture Outline. Frequency Response of LTI System. Example: Zero on Real Axis") John A. Quinn Lecture ESE 531: Digital Signal Processing Lec 15: March 21, 2017 Review, Generalized Linear Phase Systems Penn ESE 531 Spring 2017 Khanna Lecture Outline!!! 2 Frequency Response of LTI System
John A. Quinn Lecture ESE 531: Digital Signal Processing Lec 15: March 21, 2017 Review, Generalized Linear Phase Systems Penn ESE 531 Spring 2017 Khanna Lecture Outline!!! 2 Frequency Response of LTI System
ENSC327 Communications Systems 2: Fourier Representations. Jie Liang School of Engineering Science Simon Fraser University
 ENSC327 Communications Systems 2: Fourier Representations Jie Liang School of Engineering Science Simon Fraser University 1 Outline Chap 2.1 2.5: Signal Classifications Fourier Transform Dirac Delta Function
ENSC327 Communications Systems 2: Fourier Representations Jie Liang School of Engineering Science Simon Fraser University 1 Outline Chap 2.1 2.5: Signal Classifications Fourier Transform Dirac Delta Function
Chapter 7: Filter Design 7.1 Practical Filter Terminology
 hapter 7: Filter Design 7. Practical Filter Terminology Analog and digital filters and their designs constitute one of the major emphasis areas in signal processing and communication systems. This is due
hapter 7: Filter Design 7. Practical Filter Terminology Analog and digital filters and their designs constitute one of the major emphasis areas in signal processing and communication systems. This is due
Digital Signal Processing Lecture 5
 Remote Sensing Laboratory Dept. of Information Engineering and Computer Science University of Trento Via Sommarive, 14, I-38123 Povo, Trento, Italy Digital Signal Processing Lecture 5 Begüm Demir E-mail:
Remote Sensing Laboratory Dept. of Information Engineering and Computer Science University of Trento Via Sommarive, 14, I-38123 Povo, Trento, Italy Digital Signal Processing Lecture 5 Begüm Demir E-mail:
Question Paper Code : AEC11T02
 Hall Ticket No Question Paper Code : AEC11T02 VARDHAMAN COLLEGE OF ENGINEERING (AUTONOMOUS) Affiliated to JNTUH, Hyderabad Four Year B. Tech III Semester Tutorial Question Bank 2013-14 (Regulations: VCE-R11)
Hall Ticket No Question Paper Code : AEC11T02 VARDHAMAN COLLEGE OF ENGINEERING (AUTONOMOUS) Affiliated to JNTUH, Hyderabad Four Year B. Tech III Semester Tutorial Question Bank 2013-14 (Regulations: VCE-R11)
Chapter 7: The z-transform
 Chapter 7: The -Transform ECE352 1 The -Transform - definition Continuous-time systems: e st H(s) y(t) = e st H(s) e st is an eigenfunction of the LTI system h(t), and H(s) is the corresponding eigenvalue.
Chapter 7: The -Transform ECE352 1 The -Transform - definition Continuous-time systems: e st H(s) y(t) = e st H(s) e st is an eigenfunction of the LTI system h(t), and H(s) is the corresponding eigenvalue.
Discrete Time Systems
 Discrete Time Systems Valentina Hubeika, Jan Černocký DCGM FIT BUT Brno, {ihubeika,cernocky}@fit.vutbr.cz 1 LTI systems In this course, we work only with linear and time-invariant systems. We talked about
Discrete Time Systems Valentina Hubeika, Jan Černocký DCGM FIT BUT Brno, {ihubeika,cernocky}@fit.vutbr.cz 1 LTI systems In this course, we work only with linear and time-invariant systems. We talked about
Properties of LTI Systems
 Properties of LTI Systems Properties of Continuous Time LTI Systems Systems with or without memory: A system is memory less if its output at any time depends only on the value of the input at that same
Properties of LTI Systems Properties of Continuous Time LTI Systems Systems with or without memory: A system is memory less if its output at any time depends only on the value of the input at that same
5.1 The Discrete Time Fourier Transform
 32 33 5 The Discrete Time ourier Transform ourier (or frequency domain) analysis the last Complete the introduction and the development of the methods of ourier analysis Learn frequency-domain methods
32 33 5 The Discrete Time ourier Transform ourier (or frequency domain) analysis the last Complete the introduction and the development of the methods of ourier analysis Learn frequency-domain methods
EE123 Digital Signal Processing
 Aoucemets HW solutios posted -- self gradig due HW2 due Friday EE2 Digital Sigal Processig ham radio licesig lectures Tue 6:-8pm Cory 2 Lecture 6 based o slides by J.M. Kah SDR give after GSI Wedesday
Aoucemets HW solutios posted -- self gradig due HW2 due Friday EE2 Digital Sigal Processig ham radio licesig lectures Tue 6:-8pm Cory 2 Lecture 6 based o slides by J.M. Kah SDR give after GSI Wedesday
ELEG 3124 SYSTEMS AND SIGNALS Ch. 5 Fourier Transform
 Department of Electrical Engineering University of Arkansas ELEG 3124 SYSTEMS AND SIGNALS Ch. 5 Fourier Transform Dr. Jingxian Wu wuj@uark.edu OUTLINE 2 Introduction Fourier Transform Properties of Fourier
Department of Electrical Engineering University of Arkansas ELEG 3124 SYSTEMS AND SIGNALS Ch. 5 Fourier Transform Dr. Jingxian Wu wuj@uark.edu OUTLINE 2 Introduction Fourier Transform Properties of Fourier
Discrete Fourier Transform
 Discrete Fourier Transform Virtually all practical signals have finite length (e.g., sensor data, audio records, digital images, stock values, etc). Rather than considering such signals to be zero-padded
Discrete Fourier Transform Virtually all practical signals have finite length (e.g., sensor data, audio records, digital images, stock values, etc). Rather than considering such signals to be zero-padded
Review of Fundamentals of Digital Signal Processing
 Solution Manual for Theory and Applications of Digital Speech Processing by Lawrence Rabiner and Ronald Schafer Click here to Purchase full Solution Manual at http://solutionmanuals.info Link download
Solution Manual for Theory and Applications of Digital Speech Processing by Lawrence Rabiner and Ronald Schafer Click here to Purchase full Solution Manual at http://solutionmanuals.info Link download
3.2 Complex Sinusoids and Frequency Response of LTI Systems
 3. Introduction. A signal can be represented as a weighted superposition of complex sinusoids. x(t) or x[n]. LTI system: LTI System Output = A weighted superposition of the system response to each complex
3. Introduction. A signal can be represented as a weighted superposition of complex sinusoids. x(t) or x[n]. LTI system: LTI System Output = A weighted superposition of the system response to each complex
ELEG 305: Digital Signal Processing
 ELEG 305: Digital Signal Processing Lecture 18: Applications of FFT Algorithms & Linear Filtering DFT Computation; Implementation of Discrete Time Systems Kenneth E. Barner Department of Electrical and
ELEG 305: Digital Signal Processing Lecture 18: Applications of FFT Algorithms & Linear Filtering DFT Computation; Implementation of Discrete Time Systems Kenneth E. Barner Department of Electrical and
Digital Signal Processing, Homework 1, Spring 2013, Prof. C.D. Chung
 Digital Signal Processing, Homework, Spring 203, Prof. C.D. Chung. (0.5%) Page 99, Problem 2.2 (a) The impulse response h [n] of an LTI system is known to be zero, except in the interval N 0 n N. The input
Digital Signal Processing, Homework, Spring 203, Prof. C.D. Chung. (0.5%) Page 99, Problem 2.2 (a) The impulse response h [n] of an LTI system is known to be zero, except in the interval N 0 n N. The input
Lecture 11 FIR Filters
 Lecture 11 FIR Filters Fundamentals of Digital Signal Processing Spring, 2012 Wei-Ta Chu 2012/4/12 1 The Unit Impulse Sequence Any sequence can be represented in this way. The equation is true if k ranges
Lecture 11 FIR Filters Fundamentals of Digital Signal Processing Spring, 2012 Wei-Ta Chu 2012/4/12 1 The Unit Impulse Sequence Any sequence can be represented in this way. The equation is true if k ranges
VII. Discrete Fourier Transform (DFT) Chapter-8. A. Modulo Arithmetic. (n) N is n modulo N, n is an integer variable.
 Chapter-8. A. Modulo Arithmetic. (n) N is n modulo N, n is an integer variable.") 1 VII. Discrete Fourier Transform (DFT) Chapter-8 A. Modulo Arithmetic (n) N is n modulo N, n is an integer variable. (n) N = n m N 0 n m N N-1, pick m Ex. (k) 4 W N = e -j2π/n 2 Note that W N k = 0 but
1 VII. Discrete Fourier Transform (DFT) Chapter-8 A. Modulo Arithmetic (n) N is n modulo N, n is an integer variable. (n) N = n m N 0 n m N N-1, pick m Ex. (k) 4 W N = e -j2π/n 2 Note that W N k = 0 but
Lecture 2 OKAN UNIVERSITY FACULTY OF ENGINEERING AND ARCHITECTURE
 OKAN UNIVERSITY FACULTY OF ENGINEERING AND ARCHITECTURE EEE 43 DIGITAL SIGNAL PROCESSING (DSP) 2 DIFFERENCE EQUATIONS AND THE Z- TRANSFORM FALL 22 Yrd. Doç. Dr. Didem Kivanc Tureli didemk@ieee.org didem.kivanc@okan.edu.tr
OKAN UNIVERSITY FACULTY OF ENGINEERING AND ARCHITECTURE EEE 43 DIGITAL SIGNAL PROCESSING (DSP) 2 DIFFERENCE EQUATIONS AND THE Z- TRANSFORM FALL 22 Yrd. Doç. Dr. Didem Kivanc Tureli didemk@ieee.org didem.kivanc@okan.edu.tr
2. Typical Discrete-Time Systems All-Pass Systems (5.5) 2.2. Minimum-Phase Systems (5.6) 2.3. Generalized Linear-Phase Systems (5.
 2.2. Minimum-Phase Systems (5.6) 2.3. Generalized Linear-Phase Systems (5.") . Typical Discrete-Time Systems.1. All-Pass Systems (5.5).. Minimum-Phase Systems (5.6).3. Generalized Linear-Phase Systems (5.7) .1. All-Pass Systems An all-pass system is defined as a system which has
. Typical Discrete-Time Systems.1. All-Pass Systems (5.5).. Minimum-Phase Systems (5.6).3. Generalized Linear-Phase Systems (5.7) .1. All-Pass Systems An all-pass system is defined as a system which has
Lecture 4: FT Pairs, Random Signals and z-transform
 EE518 Digital Signal Processing University of Washington Autumn 2001 Dept. of Electrical Engineering Lecture 4: T Pairs, Rom Signals z-transform Wed., Oct. 10, 2001 Prof: J. Bilmes
EE518 Digital Signal Processing University of Washington Autumn 2001 Dept. of Electrical Engineering Lecture 4: T Pairs, Rom Signals z-transform Wed., Oct. 10, 2001 Prof: J. Bilmes
EE-210. Signals and Systems Homework 7 Solutions
 EE-20. Signals and Systems Homework 7 Solutions Spring 200 Exercise Due Date th May. Problems Q Let H be the causal system described by the difference equation w[n] = 7 w[n ] 2 2 w[n 2] + x[n ] x[n 2]
EE-20. Signals and Systems Homework 7 Solutions Spring 200 Exercise Due Date th May. Problems Q Let H be the causal system described by the difference equation w[n] = 7 w[n ] 2 2 w[n 2] + x[n ] x[n 2]
ECE-314 Fall 2012 Review Questions for Midterm Examination II
 ECE-314 Fall 2012 Review Questions for Midterm Examination II First, make sure you study all the problems and their solutions from homework sets 4-7. Then work on the following additional problems. Problem
ECE-314 Fall 2012 Review Questions for Midterm Examination II First, make sure you study all the problems and their solutions from homework sets 4-7. Then work on the following additional problems. Problem
Q1 Q2 Q3 Q4 Q5 Total
 EE 120: Signals & Systems Department of Electrical Engineering and Computer Sciences University of California, Berkeley Midterm Exam #1 February 29, 2016, 2:10-4:00pm Instructions: There are five questions
EE 120: Signals & Systems Department of Electrical Engineering and Computer Sciences University of California, Berkeley Midterm Exam #1 February 29, 2016, 2:10-4:00pm Instructions: There are five questions
The Z-Transform. Fall 2012, EE123 Digital Signal Processing. Eigen Functions of LTI System. Eigen Functions of LTI System
 The Z-Transform Fall 202, EE2 Digital Signal Processing Lecture 4 September 4, 202 Used for: Analysis of LTI systems Solving di erence equations Determining system stability Finding frequency response
The Z-Transform Fall 202, EE2 Digital Signal Processing Lecture 4 September 4, 202 Used for: Analysis of LTI systems Solving di erence equations Determining system stability Finding frequency response
Chapter 3 Fourier Representations of Signals and Linear Time-Invariant Systems
 Chapter 3 Fourier Representations of Signals and Linear Time-Invariant Systems Introduction Complex Sinusoids and Frequency Response of LTI Systems. Fourier Representations for Four Classes of Signals
Chapter 3 Fourier Representations of Signals and Linear Time-Invariant Systems Introduction Complex Sinusoids and Frequency Response of LTI Systems. Fourier Representations for Four Classes of Signals
EE 224 Signals and Systems I Review 1/10
 EE 224 Signals and Systems I Review 1/10 Class Contents Signals and Systems Continuous-Time and Discrete-Time Time-Domain and Frequency Domain (all these dimensions are tightly coupled) SIGNALS SYSTEMS
EE 224 Signals and Systems I Review 1/10 Class Contents Signals and Systems Continuous-Time and Discrete-Time Time-Domain and Frequency Domain (all these dimensions are tightly coupled) SIGNALS SYSTEMS
ESE 531: Digital Signal Processing
 ESE 531: Digital Signal Processing Lec 8: February 7th, 2017 Sampling and Reconstruction Lecture Outline! Review " Ideal sampling " Frequency response of sampled signal " Reconstruction " Anti-aliasing
ESE 531: Digital Signal Processing Lec 8: February 7th, 2017 Sampling and Reconstruction Lecture Outline! Review " Ideal sampling " Frequency response of sampled signal " Reconstruction " Anti-aliasing
Lecture 19 IIR Filters
 Lecture 19 IIR Filters Fundamentals of Digital Signal Processing Spring, 2012 Wei-Ta Chu 2012/5/10 1 General IIR Difference Equation IIR system: infinite-impulse response system The most general class
Lecture 19 IIR Filters Fundamentals of Digital Signal Processing Spring, 2012 Wei-Ta Chu 2012/5/10 1 General IIR Difference Equation IIR system: infinite-impulse response system The most general class
Review of Discrete-Time System
 Review of Discrete-Time System Electrical & Computer Engineering University of Maryland, College Park Acknowledgment: ENEE630 slides were based on class notes developed by Profs. K.J. Ray Liu and Min Wu.
Review of Discrete-Time System Electrical & Computer Engineering University of Maryland, College Park Acknowledgment: ENEE630 slides were based on class notes developed by Profs. K.J. Ray Liu and Min Wu.
Digital Signal Processing Lecture 9 - Design of Digital Filters - FIR
 Digital Signal Processing - Design of Digital Filters - FIR Electrical Engineering and Computer Science University of Tennessee, Knoxville November 3, 2015 Overview 1 2 3 4 Roadmap Introduction Discrete-time
Digital Signal Processing - Design of Digital Filters - FIR Electrical Engineering and Computer Science University of Tennessee, Knoxville November 3, 2015 Overview 1 2 3 4 Roadmap Introduction Discrete-time
Very useful for designing and analyzing signal processing systems
 z-transform z-transform The z-transform generalizes the Discrete-Time Fourier Transform (DTFT) for analyzing infinite-length signals and systems Very useful for designing and analyzing signal processing
z-transform z-transform The z-transform generalizes the Discrete-Time Fourier Transform (DTFT) for analyzing infinite-length signals and systems Very useful for designing and analyzing signal processing
Review of Frequency Domain Fourier Series: Continuous periodic frequency components
 Today we will review: Review of Frequency Domain Fourier series why we use it trig form & exponential form how to get coefficients for each form Eigenfunctions what they are how they relate to LTI systems
Today we will review: Review of Frequency Domain Fourier series why we use it trig form & exponential form how to get coefficients for each form Eigenfunctions what they are how they relate to LTI systems
EE 225D LECTURE ON DIGITAL FILTERS. University of California Berkeley
 University of California Berkeley College of Engineering Department of Electrical Engineering and Computer Sciences Professors : N.Morgan / B.Gold EE225D Digital Filters Spring,1999 Lecture 7 N.MORGAN
University of California Berkeley College of Engineering Department of Electrical Engineering and Computer Sciences Professors : N.Morgan / B.Gold EE225D Digital Filters Spring,1999 Lecture 7 N.MORGAN
DISCRETE FOURIER TRANSFORM
 DISCRETE FOURIER TRANSFORM 1. Introduction The sampled discrete-time fourier transform (DTFT) of a finite length, discrete-time signal is known as the discrete Fourier transform (DFT). The DFT contains
DISCRETE FOURIER TRANSFORM 1. Introduction The sampled discrete-time fourier transform (DTFT) of a finite length, discrete-time signal is known as the discrete Fourier transform (DFT). The DFT contains
Digital Signal Processing I Final Exam Fall 2008 ECE Dec Cover Sheet
 Digital Signal Processing I Final Exam Fall 8 ECE538 7 Dec.. 8 Cover Sheet Test Duration: minutes. Open Book but Closed Notes. Calculators NOT allowed. This test contains FIVE problems. All work should
Digital Signal Processing I Final Exam Fall 8 ECE538 7 Dec.. 8 Cover Sheet Test Duration: minutes. Open Book but Closed Notes. Calculators NOT allowed. This test contains FIVE problems. All work should
Discrete Time Signals and Systems Time-frequency Analysis. Gloria Menegaz
 Discrete Time Signals and Systems Time-frequency Analysis Gloria Menegaz Time-frequency Analysis Fourier transform (1D and 2D) Reference textbook: Discrete time signal processing, A.W. Oppenheim and R.W.
Discrete Time Signals and Systems Time-frequency Analysis Gloria Menegaz Time-frequency Analysis Fourier transform (1D and 2D) Reference textbook: Discrete time signal processing, A.W. Oppenheim and R.W.
Filter structures ELEC-E5410
 Filter structures ELEC-E5410 Contents FIR filter basics Ideal impulse responses Polyphase decomposition Fractional delay by polyphase structure Nyquist filters Half-band filters Gibbs phenomenon Discrete-time
Filter structures ELEC-E5410 Contents FIR filter basics Ideal impulse responses Polyphase decomposition Fractional delay by polyphase structure Nyquist filters Half-band filters Gibbs phenomenon Discrete-time
Discrete-time Signals and Systems in
 Discrete-time Signals and Systems in the Frequency Domain Chapter 3, Sections 3.1-39 3.9 Chapter 4, Sections 4.8-4.9 Dr. Iyad Jafar Outline Introduction The Continuous-Time FourierTransform (CTFT) The
Discrete-time Signals and Systems in the Frequency Domain Chapter 3, Sections 3.1-39 3.9 Chapter 4, Sections 4.8-4.9 Dr. Iyad Jafar Outline Introduction The Continuous-Time FourierTransform (CTFT) The
The Discrete-Time Fourier
 Chapter 3 The Discrete-Time Fourier Transform 清大電機系林嘉文 cwlin@ee.nthu.edu.tw 03-5731152 Original PowerPoint slides prepared by S. K. Mitra 3-1-1 Continuous-Time Fourier Transform Definition The CTFT of
Chapter 3 The Discrete-Time Fourier Transform 清大電機系林嘉文 cwlin@ee.nthu.edu.tw 03-5731152 Original PowerPoint slides prepared by S. K. Mitra 3-1-1 Continuous-Time Fourier Transform Definition The CTFT of
Continuous Fourier transform of a Gaussian Function
 Continuous Fourier transform of a Gaussian Function Gaussian function: e t2 /(2σ 2 ) The CFT of a Gaussian function is also a Gaussian function (i.e., time domain is Gaussian, then the frequency domain
Continuous Fourier transform of a Gaussian Function Gaussian function: e t2 /(2σ 2 ) The CFT of a Gaussian function is also a Gaussian function (i.e., time domain is Gaussian, then the frequency domain
E : Lecture 1 Introduction
 E85.2607: Lecture 1 Introduction 1 Administrivia 2 DSP review 3 Fun with Matlab E85.2607: Lecture 1 Introduction 2010-01-21 1 / 24 Course overview Advanced Digital Signal Theory Design, analysis, and implementation
E85.2607: Lecture 1 Introduction 1 Administrivia 2 DSP review 3 Fun with Matlab E85.2607: Lecture 1 Introduction 2010-01-21 1 / 24 Course overview Advanced Digital Signal Theory Design, analysis, and implementation
Analog vs. discrete signals
 Analog vs. discrete signals Continuous-time signals are also known as analog signals because their amplitude is analogous (i.e., proportional) to the physical quantity they represent. Discrete-time signals
Analog vs. discrete signals Continuous-time signals are also known as analog signals because their amplitude is analogous (i.e., proportional) to the physical quantity they represent. Discrete-time signals
Digital Signal Processing Module 1 Analysis of Discrete time Linear Time - Invariant Systems
 Digital Signal Processing Module 1 Analysis of Discrete time Linear Time - Invariant Systems Objective: 1. To understand the representation of Discrete time signals 2. To analyze the causality and stability
Digital Signal Processing Module 1 Analysis of Discrete time Linear Time - Invariant Systems Objective: 1. To understand the representation of Discrete time signals 2. To analyze the causality and stability
NAME: ht () 1 2π. Hj0 ( ) dω Find the value of BW for the system having the following impulse response.
 1 2π. Hj0 ( ) dω Find the value of BW for the system having the following impulse response.") University of California at Berkeley Department of Electrical Engineering and Computer Sciences Professor J. M. Kahn, EECS 120, Fall 1998 Final Examination, Wednesday, December 16, 1998, 5-8 pm NAME: 1.
University of California at Berkeley Department of Electrical Engineering and Computer Sciences Professor J. M. Kahn, EECS 120, Fall 1998 Final Examination, Wednesday, December 16, 1998, 5-8 pm NAME: 1.
Digital Signal Processing. Midterm 2 Solutions
 EE 123 University of California, Berkeley Anant Sahai arch 15, 2007 Digital Signal Processing Instructions idterm 2 Solutions Total time allowed for the exam is 80 minutes Please write your name and SID
EE 123 University of California, Berkeley Anant Sahai arch 15, 2007 Digital Signal Processing Instructions idterm 2 Solutions Total time allowed for the exam is 80 minutes Please write your name and SID
Transform analysis of LTI systems Oppenheim and Schafer, Second edition pp For LTI systems we can write
 Transform analysis of LTI systems Oppenheim and Schafer, Second edition pp. 4 9. For LTI systems we can write yœn D xœn hœn D X kd xœkhœn Alternatively, this relationship can be expressed in the z-transform
Transform analysis of LTI systems Oppenheim and Schafer, Second edition pp. 4 9. For LTI systems we can write yœn D xœn hœn D X kd xœkhœn Alternatively, this relationship can be expressed in the z-transform
EE301 Signals and Systems In-Class Exam Exam 3 Thursday, Apr. 20, Cover Sheet
 NAME: NAME EE301 Signals and Systems In-Class Exam Exam 3 Thursday, Apr. 20, 2017 Cover Sheet Test Duration: 75 minutes. Coverage: Chaps. 5,7 Open Book but Closed Notes. One 8.5 in. x 11 in. crib sheet
NAME: NAME EE301 Signals and Systems In-Class Exam Exam 3 Thursday, Apr. 20, 2017 Cover Sheet Test Duration: 75 minutes. Coverage: Chaps. 5,7 Open Book but Closed Notes. One 8.5 in. x 11 in. crib sheet
Digital Signal Processing Lecture 10 - Discrete Fourier Transform
 Digital Signal Processing - Discrete Fourier Transform Electrical Engineering and Computer Science University of Tennessee, Knoxville November 12, 2015 Overview 1 2 3 4 Review - 1 Introduction Discrete-time
Digital Signal Processing - Discrete Fourier Transform Electrical Engineering and Computer Science University of Tennessee, Knoxville November 12, 2015 Overview 1 2 3 4 Review - 1 Introduction Discrete-time
ESE 531: Digital Signal Processing
 ESE 531: Digital Signal Processing Lec 6: January 31, 2017 Inverse z-transform Lecture Outline! z-transform " Tie up loose ends " Regions of convergence properties! Inverse z-transform " Inspection " Partial
ESE 531: Digital Signal Processing Lec 6: January 31, 2017 Inverse z-transform Lecture Outline! z-transform " Tie up loose ends " Regions of convergence properties! Inverse z-transform " Inspection " Partial
Shift Property of z-transform. Lecture 16. More z-transform (Lathi 5.2, ) More Properties of z-transform. Convolution property of z-transform
 More Properties of z-transform. Convolution property of z-transform") Shift Property of -Transform If Lecture 6 More -Transform (Lathi 5.2,5.4-5.5) then which is delay causal signal by sample period. If we delay x[n] first: Peter Cheung Department of Electrical & Electronic
Shift Property of -Transform If Lecture 6 More -Transform (Lathi 5.2,5.4-5.5) then which is delay causal signal by sample period. If we delay x[n] first: Peter Cheung Department of Electrical & Electronic
ECE503: Digital Signal Processing Lecture 5
 ECE53: Digital Signal Processing Lecture 5 D. Richard Brown III WPI 3-February-22 WPI D. Richard Brown III 3-February-22 / 32 Lecture 5 Topics. Magnitude and phase characterization of transfer functions
ECE53: Digital Signal Processing Lecture 5 D. Richard Brown III WPI 3-February-22 WPI D. Richard Brown III 3-February-22 / 32 Lecture 5 Topics. Magnitude and phase characterization of transfer functions
INF3440/INF4440. Design of digital filters
 Last week lecture Today s lecture: Chapter 8.1-8.3, 8.4.2, 8.5.3 INF3440/INF4440. Design of digital filters October 2004 Last week lecture Today s lecture: Chapter 8.1-8.3, 8.4.2, 8.5.3 Last lectures:
Last week lecture Today s lecture: Chapter 8.1-8.3, 8.4.2, 8.5.3 INF3440/INF4440. Design of digital filters October 2004 Last week lecture Today s lecture: Chapter 8.1-8.3, 8.4.2, 8.5.3 Last lectures:
ESE 531: Digital Signal Processing
 ESE 531: Digital Signal Processing Lec 6: January 30, 2018 Inverse z-transform Lecture Outline! z-transform " Tie up loose ends " Regions of convergence properties! Inverse z-transform " Inspection " Partial
ESE 531: Digital Signal Processing Lec 6: January 30, 2018 Inverse z-transform Lecture Outline! z-transform " Tie up loose ends " Regions of convergence properties! Inverse z-transform " Inspection " Partial
Discrete-Time Signals and Systems. Frequency Domain Analysis of LTI Systems. The Frequency Response Function. The Frequency Response Function
 Discrete-Time Signals and s Frequency Domain Analysis of LTI s Dr. Deepa Kundur University of Toronto Reference: Sections 5., 5.2-5.5 of John G. Proakis and Dimitris G. Manolakis, Digital Signal Processing:
Discrete-Time Signals and s Frequency Domain Analysis of LTI s Dr. Deepa Kundur University of Toronto Reference: Sections 5., 5.2-5.5 of John G. Proakis and Dimitris G. Manolakis, Digital Signal Processing:
Signals & Systems Handout #4
 Signals & Systems Handout #4 H-4. Elementary Discrete-Domain Functions (Sequences): Discrete-domain functions are defined for n Z. H-4.. Sequence Notation: We use the following notation to indicate the
Signals & Systems Handout #4 H-4. Elementary Discrete-Domain Functions (Sequences): Discrete-domain functions are defined for n Z. H-4.. Sequence Notation: We use the following notation to indicate the
EE538 Digital Signal Processing I Session 13 Exam 1 Live: Wed., Sept. 18, Cover Sheet
 EE538 Digital Signal Processing I Session 3 Exam Live: Wed., Sept. 8, 00 Cover Sheet Test Duration: 50 minutes. Coverage: Sessions -0. Open Book but Closed Notes. Calculators not allowed. This test contains
EE538 Digital Signal Processing I Session 3 Exam Live: Wed., Sept. 8, 00 Cover Sheet Test Duration: 50 minutes. Coverage: Sessions -0. Open Book but Closed Notes. Calculators not allowed. This test contains
ECE 308 Discrete-Time Signals and Systems
 ECE 38-6 ECE 38 Discrete-Time Signals and Systems Z. Aliyazicioglu Electrical and Computer Engineering Department Cal Poly Pomona ECE 38-6 1 Intoduction Two basic methods for analyzing the response of
ECE 38-6 ECE 38 Discrete-Time Signals and Systems Z. Aliyazicioglu Electrical and Computer Engineering Department Cal Poly Pomona ECE 38-6 1 Intoduction Two basic methods for analyzing the response of
Lecture 19: Discrete Fourier Series
 EE518 Digital Signal Processing University of Washington Autumn 2001 Dept. of Electrical Engineering Lecture 19: Discrete Fourier Series Dec 5, 2001 Prof: J. Bilmes TA: Mingzhou
EE518 Digital Signal Processing University of Washington Autumn 2001 Dept. of Electrical Engineering Lecture 19: Discrete Fourier Series Dec 5, 2001 Prof: J. Bilmes TA: Mingzhou
ELEG 305: Digital Signal Processing
 ELEG 5: Digital Signal Processing Lecture 6: The Fast Fourier Transform; Radix Decimatation in Time Kenneth E. Barner Department of Electrical and Computer Engineering University of Delaware Fall 8 K.
ELEG 5: Digital Signal Processing Lecture 6: The Fast Fourier Transform; Radix Decimatation in Time Kenneth E. Barner Department of Electrical and Computer Engineering University of Delaware Fall 8 K.
Massachusetts Institute of Technology Department of Electrical Engineering and Computer Science. Fall Solutions for Problem Set 2
 Massachusetts Institute of Technology Department of Electrical Engineering and Computer Science Issued: Tuesday, September 5. 6.: Discrete-Time Signal Processing Fall 5 Solutions for Problem Set Problem.
Massachusetts Institute of Technology Department of Electrical Engineering and Computer Science Issued: Tuesday, September 5. 6.: Discrete-Time Signal Processing Fall 5 Solutions for Problem Set Problem.
/ (2π) X(e jω ) dω. 4. An 8 point sequence is given by x(n) = {2,2,2,2,1,1,1,1}. Compute 8 point DFT of x(n) by
 X(e jω ) dω. 4. An 8 point sequence is given by x(n) = {2,2,2,2,1,1,1,1}. Compute 8 point DFT of x(n) by") Code No: RR320402 Set No. 1 III B.Tech II Semester Regular Examinations, Apr/May 2006 DIGITAL SIGNAL PROCESSING ( Common to Electronics & Communication Engineering, Electronics & Instrumentation Engineering,
Code No: RR320402 Set No. 1 III B.Tech II Semester Regular Examinations, Apr/May 2006 DIGITAL SIGNAL PROCESSING ( Common to Electronics & Communication Engineering, Electronics & Instrumentation Engineering,
Fourier series for continuous and discrete time signals
 8-9 Signals and Systems Fall 5 Fourier series for continuous and discrete time signals The road to Fourier : Two weeks ago you saw that if we give a complex exponential as an input to a system, the output
8-9 Signals and Systems Fall 5 Fourier series for continuous and discrete time signals The road to Fourier : Two weeks ago you saw that if we give a complex exponential as an input to a system, the output
Final Exam of ECE301, Section 1 (Prof. Chih-Chun Wang) 1 3pm, Friday, December 13, 2016, EE 129.
 1 3pm, Friday, December 13, 2016, EE 129.") Final Exam of ECE301, Section 1 (Prof. Chih-Chun Wang) 1 3pm, Friday, December 13, 2016, EE 129. 1. Please make sure that it is your name printed on the exam booklet. Enter your student ID number, and
Final Exam of ECE301, Section 1 (Prof. Chih-Chun Wang) 1 3pm, Friday, December 13, 2016, EE 129. 1. Please make sure that it is your name printed on the exam booklet. Enter your student ID number, and
ECE 301 Division 1 Final Exam Solutions, 12/12/2011, 3:20-5:20pm in PHYS 114.
 ECE 301 Division 1 Final Exam Solutions, 12/12/2011, 3:20-5:20pm in PHYS 114. The exam for both sections of ECE 301 is conducted in the same room, but the problems are completely different. Your ID will
ECE 301 Division 1 Final Exam Solutions, 12/12/2011, 3:20-5:20pm in PHYS 114. The exam for both sections of ECE 301 is conducted in the same room, but the problems are completely different. Your ID will
UNIT - 7: FIR Filter Design
 UNIT - 7: FIR Filter Design Dr. Manjunatha. P manjup.jnnce@gmail.com Professor Dept. of ECE J.N.N. College of Engineering, Shimoga October 5, 06 Unit 7 Syllabus Introduction FIR Filter Design:[,, 3, 4]
UNIT - 7: FIR Filter Design Dr. Manjunatha. P manjup.jnnce@gmail.com Professor Dept. of ECE J.N.N. College of Engineering, Shimoga October 5, 06 Unit 7 Syllabus Introduction FIR Filter Design:[,, 3, 4]
Lecture 8 Finite Impulse Response Filters
 Lecture 8 Finite Impulse Response Filters Outline 8. Finite Impulse Response Filters.......................... 8. oving Average Filter............................... 8.. Phase response...............................
Lecture 8 Finite Impulse Response Filters Outline 8. Finite Impulse Response Filters.......................... 8. oving Average Filter............................... 8.. Phase response...............................
Lecture 7 Discrete Systems
 Lecture 7 Discrete Systems EE 52: Instrumentation and Measurements Lecture Notes Update on November, 29 Aly El-Osery, Electrical Engineering Dept., New Mexico Tech 7. Contents The z-transform 2 Linear
Lecture 7 Discrete Systems EE 52: Instrumentation and Measurements Lecture Notes Update on November, 29 Aly El-Osery, Electrical Engineering Dept., New Mexico Tech 7. Contents The z-transform 2 Linear
EECE 301 Signals & Systems Prof. Mark Fowler
 EECE 30 Signals & Systems Prof. Mark Fowler Note Set #26 D-T Systems: Transfer Function and Frequency Response / Finding the Transfer Function from Difference Eq. Recall: we found a DT system s freq. resp.
EECE 30 Signals & Systems Prof. Mark Fowler Note Set #26 D-T Systems: Transfer Function and Frequency Response / Finding the Transfer Function from Difference Eq. Recall: we found a DT system s freq. resp.
! Review: Discrete Fourier Transform (DFT) ! DFT Properties. " Duality. " Circular Shift. ! Circular Convolution. ! Fast Convolution Methods
 ! DFT Properties. Duality. Circular Shift. ! Circular Convolution. ! Fast Convolution Methods") Toda ESE 531: Digital Signal Processing! Review: Discrete Fourier Transform (DFT)! DFT Properties Lec 20: April 11, 2017 Discrete Fourier Transform, Pt 2 " Dualit " Circular Shift! Circular Convolution!
Toda ESE 531: Digital Signal Processing! Review: Discrete Fourier Transform (DFT)! DFT Properties Lec 20: April 11, 2017 Discrete Fourier Transform, Pt 2 " Dualit " Circular Shift! Circular Convolution!