Digital Signal Processing Lecture 5
|
|
|
- Bernice Weaver
- 5 years ago
- Views:
Transcription




1 Remote Sensing Laboratory Dept. of Information Engineering and Computer Science University of Trento Via Sommarive, 14, I Povo, Trento, Italy Digital Signal Processing Lecture 5 Begüm Demir demir@disi.unitn.it Web page:
2 Convolution
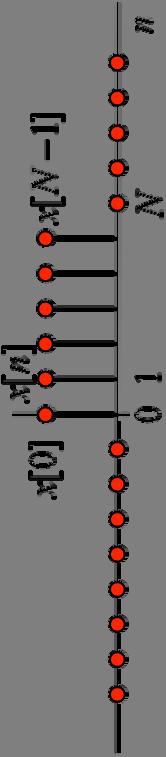
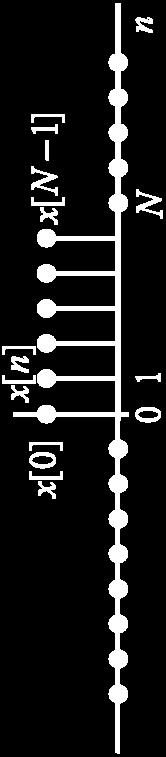
3 Convolution
4 Convolution
5 Convolution
6 Convolution
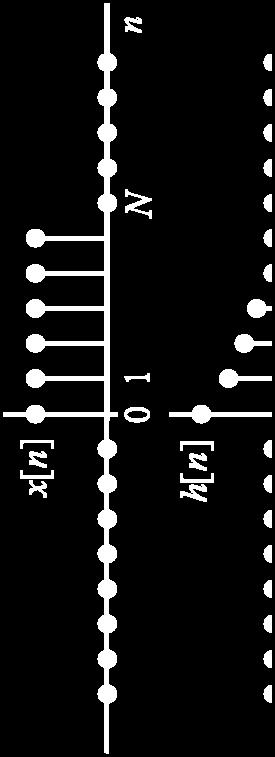
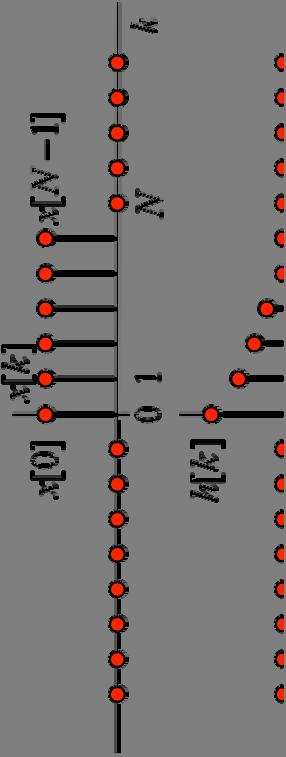
7 Convolution No Overlap for n < 0
8 Convolution Partial Overlap

9 Convolution Partial Overlap
10 Convolution Partial Overlap
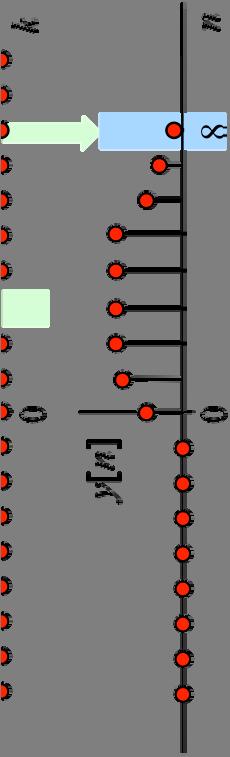
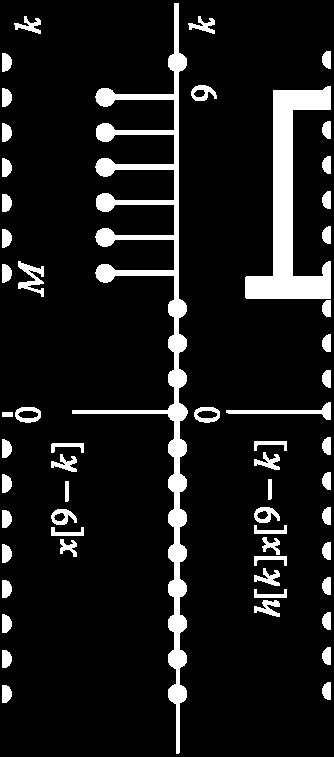
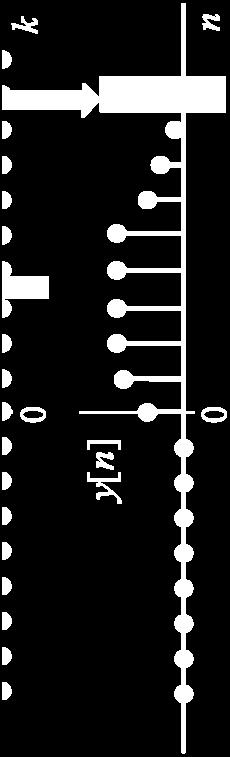
11 Convolution Full Overlap
12 Convolution Full Overlap

13 Convolution Full Overlap
14 Convolution Partial Overlap

15 Convolution Partial Overlap
16 Convolution Partial Overlap
17 Convolution No Overlap for n > 0
18 Building Blocks for DT Systems Unit delay = Memory => store at one sampling interval and read at the next one
19 Examples Signal flow graphs provide compact representation
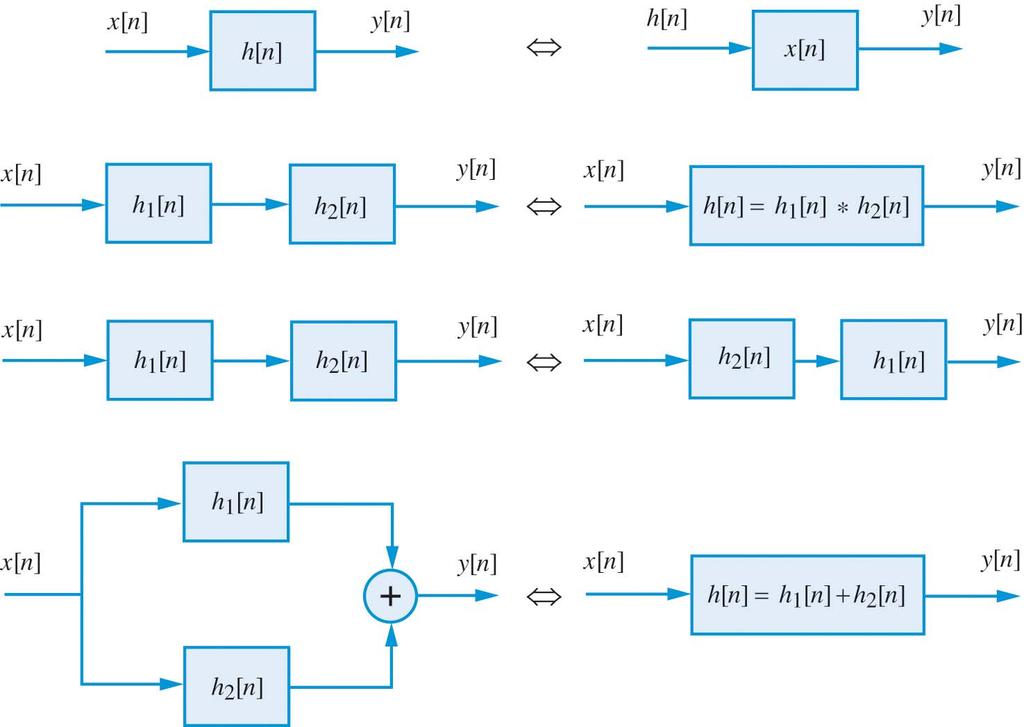
20 Interconnection of LTI Systems
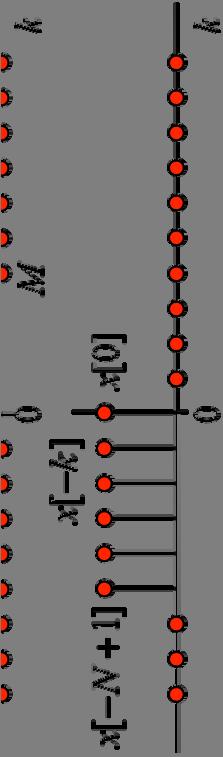
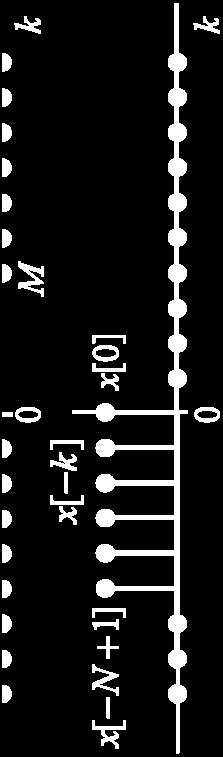
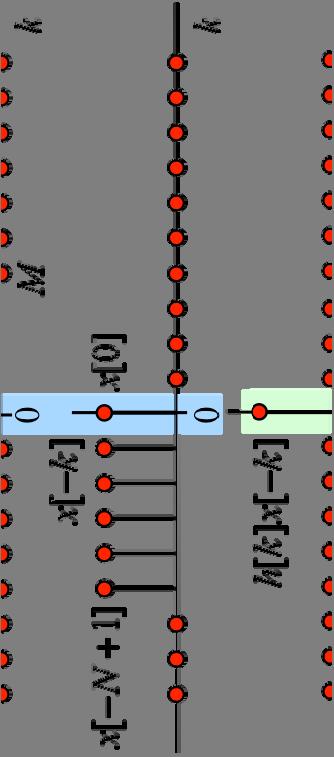
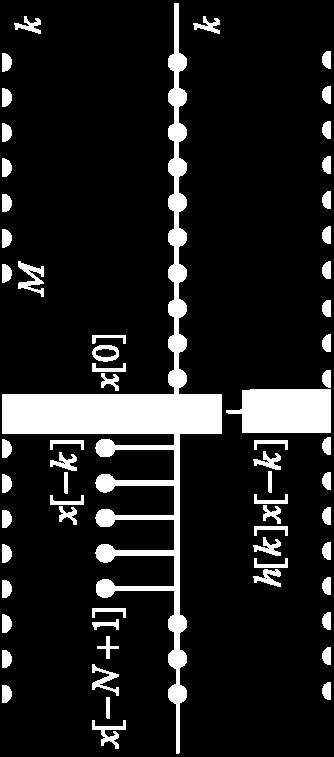
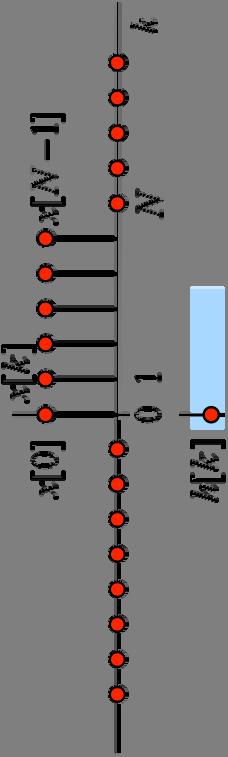
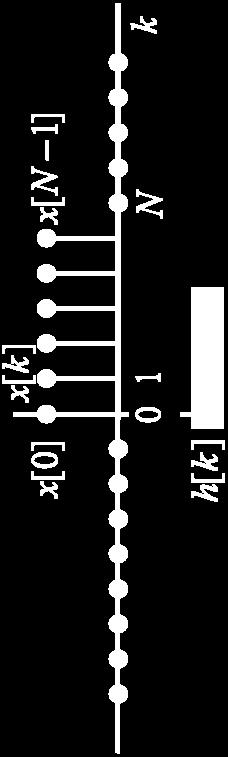
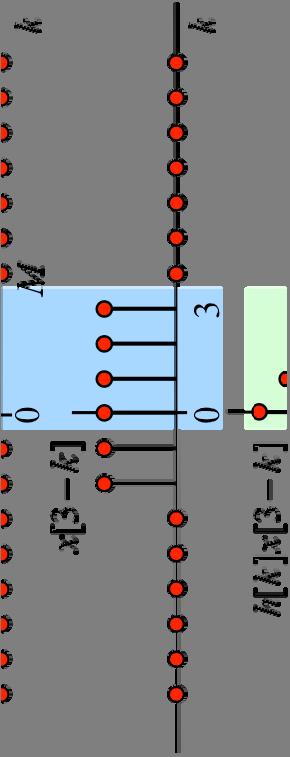
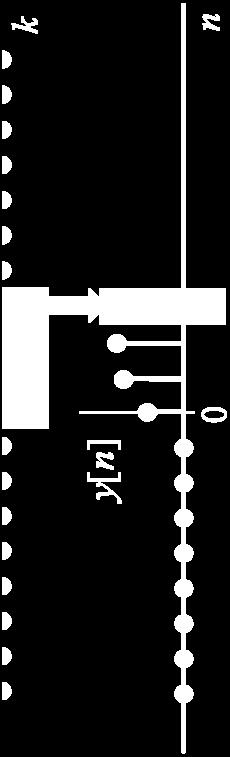
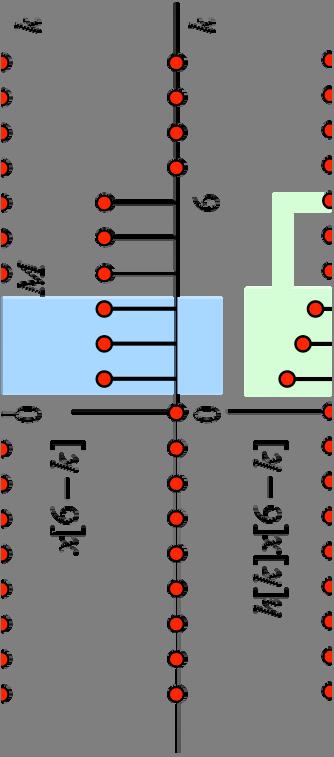
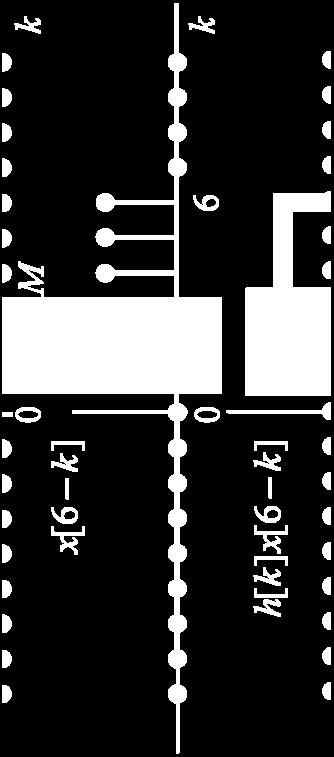
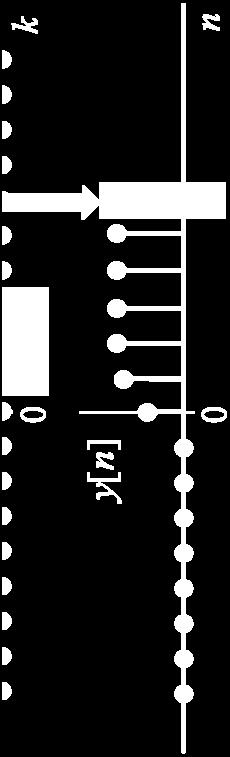
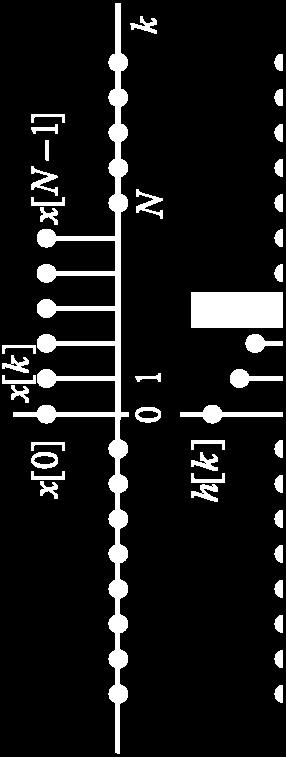
21 System Realization For causal LTI systems, h[n] = 0 for n < 0. Finite impulse response (FIR): Infinite impulse response (IIR): M 1 yn [ ] hkxn [ ] [ k] k 0 yn [ ] hkxn [ ] [ k] k 0 The convolution summation formula expresses the output of the linear timeinvariant system explicitly and only in terms of the input signal. When n is increasing, memory requirements also increases with time. How would one realize these systems?
![System Realization Moving Average if y[n] depends only on the](/docs-images/92/110725398/images/22-1.jpg "present and past inputs, such a system is called nonrecursive.")
22 System Realization Moving Average if y[n] depends only on the present and past inputs, such a system is called nonrecursive.
23 System Realization Accumulator This is an example of a recursive system. In the recursive systems y[n] depends not only on the present and past inputs, but also available past output values.
24
25 Linear Constant-Coefficient Difference Equations (LCCDE) Discrete-time systems described by difference equations express the output of the system not only in terms of the present and past values of the input, but also in terms of the already available past output values: ayn [ ] ayn [ 1]... a yn [ N] bxn [ ] bxn [ 1]... b xn [ M] 0 1 N 0 1 M N k 0 a k y[ n k] M k 0 b k x[ n k] M N 1 yn [ ] bxn k [ k] ayn k [ k] 0 k 0 k 1 B. Demir
26 Linear Constant-Coefficient Difference Equations If the output signal does not depend on the past values of output (N=0), it is defined as: M yn [ ] bxn [ k] k 0 k M k k 0 hn [ ] b [ n k] bk, 0 n M 0, otherwise The length of impulse response is M+1. B. Demir
27 Example-1 y[ n] y[ n 1] x[ n] y[ 1] 0 n 0 y[0] y[ 1] x[0] 1 n 1 y[1] y[0] x[1] 3 n 2 y[2] y[1] x[2] 4 n 3 y[3] y[2] x[3] 4 n 4 x[ n] 0, y[ n] 4 n 0 x[ n] 0, y[ 1] 0, y[ n] 0 B. Demir
28 Example-2 B. Demir
29 Example-2-Cont B. Demir
30 Example-2-Cont B. Demir
31 Example-2-Cont B. Demir
32 Linear Constant-Coefficient Difference Equations Given LCCDE as the I/O relationship describing LTI system, the objective is to determine an explicit expression for the output y[n]. Basically, the goal is to determine y[n], n 0, of the system given a specific input x[n], n 0, and set of initial conditions. The direct solution method assumes that the total solution is the sum of two parts: B. Demir
33 Linear Constant-Coefficient Difference Equations Homogeneous Solution: N k 0 ayn [ k] 0 k It is assumed that the solution of this eq. is in the form of n yn [ ] and the eq. is described as polynomial eq. a... a 0 n n 1 n N 1 N N N 1 a1... an 0 characteristic poly. B. Demir
34 Linear Constant-Coefficient Difference Equations The polynomial has N roots (λ 1, λ 2,, λ N ). The roots can be real or complex valued. Complex-valued roots occur as complex conjugate pairs. Some of N roots may be identical. If the roots are distinct: y [ n] C C C n n n h N N where C 1, C 2,, C N are weighting coefficients. These coefficients are determined from the initial conditions. If λ 1 is a root of multiplicity m, then eq. becomes y [ n] C C n C n C n h n n 2 n 3 n Cn C C m 1 n n n m 1 m 1 m 1 N N B. Demir
35 Linear Constant-Coefficient Difference Equations Particular Solution: N a y [ n k] b x[ n k] M k p k k 0 k 0 To solve this eq., it is assumed for y p [n], a form that depends on the form of the input x[n]. If x[n] is given as an exponential, it is assumed that the particular solution is also exponential. If x[n] is sinusoidal, the particular solution is also sinusoidal. Thus, the assumed form for the particular solution takes the basic form of the signal x[n]. B. Demir
36 Example-1 B. Demir
37 Example-1 B. Demir
38 Example-1 Cont
39 Example-1 Cont
40 Linear Constant-Coefficient Difference Equations The total solution can be also defined as the sum of two parts: yn [ ] y [ n] y [ n] zi zs y zi [n]= zero input response y zs =zero state response N k 0 ay[ n k] 0 k zi N n zi[ ] j j j 1 y n C y [ n] y [n] y [n] zs h p Assume that all the initial conditions are zero B. Demir 40
41 Example yn [ ] 3 yn [ 1] 4 yn [ 2] 0 y[-1]=5 ve y[-2]=0 yzi n [ n] ( 1) (4) n 2 B. Demir
42 Linear Constant-Coefficient Difference Equations h[n] is the zero state response of LTI causal systems since h[n]=0 when n<0. B. Demir
43 Example B. Demir
Digital Signal Processing Lecture 4
 Remote Sensing Laboratory Dept. of Information Engineering and Computer Science University of Trento Via Sommarive, 14, I-38123 Povo, Trento, Italy Digital Signal Processing Lecture 4 Begüm Demir E-mail:
Remote Sensing Laboratory Dept. of Information Engineering and Computer Science University of Trento Via Sommarive, 14, I-38123 Povo, Trento, Italy Digital Signal Processing Lecture 4 Begüm Demir E-mail:
ELEG 305: Digital Signal Processing
 ELEG 305: Digital Signal Processing Lecture 1: Course Overview; Discrete-Time Signals & Systems Kenneth E. Barner Department of Electrical and Computer Engineering University of Delaware Fall 2008 K. E.
ELEG 305: Digital Signal Processing Lecture 1: Course Overview; Discrete-Time Signals & Systems Kenneth E. Barner Department of Electrical and Computer Engineering University of Delaware Fall 2008 K. E.
ECE 308 Discrete-Time Signals and Systems
 ECE 38-6 ECE 38 Discrete-Time Signals and Systems Z. Aliyazicioglu Electrical and Computer Engineering Department Cal Poly Pomona ECE 38-6 1 Intoduction Two basic methods for analyzing the response of
ECE 38-6 ECE 38 Discrete-Time Signals and Systems Z. Aliyazicioglu Electrical and Computer Engineering Department Cal Poly Pomona ECE 38-6 1 Intoduction Two basic methods for analyzing the response of
2. CONVOLUTION. Convolution sum. Response of d.t. LTI systems at a certain input signal
 2. CONVOLUTION Convolution sum. Response of d.t. LTI systems at a certain input signal Any signal multiplied by the unit impulse = the unit impulse weighted by the value of the signal in 0: xn [ ] δ [
2. CONVOLUTION Convolution sum. Response of d.t. LTI systems at a certain input signal Any signal multiplied by the unit impulse = the unit impulse weighted by the value of the signal in 0: xn [ ] δ [
Digital Signal Processing Lecture 3 - Discrete-Time Systems
 Digital Signal Processing - Discrete-Time Systems Electrical Engineering and Computer Science University of Tennessee, Knoxville August 25, 2015 Overview 1 2 3 4 5 6 7 8 Introduction Three components of
Digital Signal Processing - Discrete-Time Systems Electrical Engineering and Computer Science University of Tennessee, Knoxville August 25, 2015 Overview 1 2 3 4 5 6 7 8 Introduction Three components of
Rui Wang, Assistant professor Dept. of Information and Communication Tongji University.
 Linear Time Invariant (LTI) Systems Rui Wang, Assistant professor Dept. of Information and Communication Tongji University it Email: ruiwang@tongji.edu.cn Outline Discrete-time LTI system: The convolution
Linear Time Invariant (LTI) Systems Rui Wang, Assistant professor Dept. of Information and Communication Tongji University it Email: ruiwang@tongji.edu.cn Outline Discrete-time LTI system: The convolution
Lecture 19 IIR Filters
 Lecture 19 IIR Filters Fundamentals of Digital Signal Processing Spring, 2012 Wei-Ta Chu 2012/5/10 1 General IIR Difference Equation IIR system: infinite-impulse response system The most general class
Lecture 19 IIR Filters Fundamentals of Digital Signal Processing Spring, 2012 Wei-Ta Chu 2012/5/10 1 General IIR Difference Equation IIR system: infinite-impulse response system The most general class
Analog vs. discrete signals
 Analog vs. discrete signals Continuous-time signals are also known as analog signals because their amplitude is analogous (i.e., proportional) to the physical quantity they represent. Discrete-time signals
Analog vs. discrete signals Continuous-time signals are also known as analog signals because their amplitude is analogous (i.e., proportional) to the physical quantity they represent. Discrete-time signals
Discrete-time signals and systems
 Discrete-time signals and systems 1 DISCRETE-TIME DYNAMICAL SYSTEMS x(t) G y(t) Linear system: Output y(n) is a linear function of the inputs sequence: y(n) = k= h(k)x(n k) h(k): impulse response of the
Discrete-time signals and systems 1 DISCRETE-TIME DYNAMICAL SYSTEMS x(t) G y(t) Linear system: Output y(n) is a linear function of the inputs sequence: y(n) = k= h(k)x(n k) h(k): impulse response of the
LECTURE NOTES DIGITAL SIGNAL PROCESSING III B.TECH II SEMESTER (JNTUK R 13)
") LECTURE NOTES ON DIGITAL SIGNAL PROCESSING III B.TECH II SEMESTER (JNTUK R 13) FACULTY : B.V.S.RENUKA DEVI (Asst.Prof) / Dr. K. SRINIVASA RAO (Assoc. Prof) DEPARTMENT OF ELECTRONICS AND COMMUNICATIONS
LECTURE NOTES ON DIGITAL SIGNAL PROCESSING III B.TECH II SEMESTER (JNTUK R 13) FACULTY : B.V.S.RENUKA DEVI (Asst.Prof) / Dr. K. SRINIVASA RAO (Assoc. Prof) DEPARTMENT OF ELECTRONICS AND COMMUNICATIONS
ELEN E4810: Digital Signal Processing Topic 2: Time domain
 ELEN E4810: Digital Signal Processing Topic 2: Time domain 1. Discrete-time systems 2. Convolution 3. Linear Constant-Coefficient Difference Equations (LCCDEs) 4. Correlation 1 1. Discrete-time systems
ELEN E4810: Digital Signal Processing Topic 2: Time domain 1. Discrete-time systems 2. Convolution 3. Linear Constant-Coefficient Difference Equations (LCCDEs) 4. Correlation 1 1. Discrete-time systems
Introduction to DSP Time Domain Representation of Signals and Systems
 Introduction to DSP Time Domain Representation of Signals and Systems Dr. Waleed Al-Hanafy waleed alhanafy@yahoo.com Faculty of Electronic Engineering, Menoufia Univ., Egypt Digital Signal Processing (ECE407)
Introduction to DSP Time Domain Representation of Signals and Systems Dr. Waleed Al-Hanafy waleed alhanafy@yahoo.com Faculty of Electronic Engineering, Menoufia Univ., Egypt Digital Signal Processing (ECE407)
Lecture 7 - IIR Filters
 Lecture 7 - IIR Filters James Barnes (James.Barnes@colostate.edu) Spring 204 Colorado State University Dept of Electrical and Computer Engineering ECE423 / 2 Outline. IIR Filter Representations Difference
Lecture 7 - IIR Filters James Barnes (James.Barnes@colostate.edu) Spring 204 Colorado State University Dept of Electrical and Computer Engineering ECE423 / 2 Outline. IIR Filter Representations Difference
Lecture 11 FIR Filters
 Lecture 11 FIR Filters Fundamentals of Digital Signal Processing Spring, 2012 Wei-Ta Chu 2012/4/12 1 The Unit Impulse Sequence Any sequence can be represented in this way. The equation is true if k ranges
Lecture 11 FIR Filters Fundamentals of Digital Signal Processing Spring, 2012 Wei-Ta Chu 2012/4/12 1 The Unit Impulse Sequence Any sequence can be represented in this way. The equation is true if k ranges
Cosc 3451 Signals and Systems. What is a system? Systems Terminology and Properties of Systems
 Cosc 3451 Signals and Systems Systems Terminology and Properties of Systems What is a system? an entity that manipulates one or more signals to yield new signals (often to accomplish a function) can be
Cosc 3451 Signals and Systems Systems Terminology and Properties of Systems What is a system? an entity that manipulates one or more signals to yield new signals (often to accomplish a function) can be
Implementation of Discrete-Time Systems
 EEE443 Digital Signal Processing Implementation of Discrete-Time Systems Dr. Shahrel A. Suandi PPKEE, Engineering Campus, USM Introduction A linear-time invariant system (LTI) is described by linear constant
EEE443 Digital Signal Processing Implementation of Discrete-Time Systems Dr. Shahrel A. Suandi PPKEE, Engineering Campus, USM Introduction A linear-time invariant system (LTI) is described by linear constant
Universiti Malaysia Perlis EKT430: DIGITAL SIGNAL PROCESSING LAB ASSIGNMENT 3: DISCRETE TIME SYSTEM IN TIME DOMAIN
 Universiti Malaysia Perlis EKT430: DIGITAL SIGNAL PROCESSING LAB ASSIGNMENT 3: DISCRETE TIME SYSTEM IN TIME DOMAIN Pusat Pengajian Kejuruteraan Komputer Dan Perhubungan Universiti Malaysia Perlis Discrete-Time
Universiti Malaysia Perlis EKT430: DIGITAL SIGNAL PROCESSING LAB ASSIGNMENT 3: DISCRETE TIME SYSTEM IN TIME DOMAIN Pusat Pengajian Kejuruteraan Komputer Dan Perhubungan Universiti Malaysia Perlis Discrete-Time
EE123 Digital Signal Processing
 EE123 Digital Signal Processing Lecture 2 Discrete Time Systems Today Last time: Administration Overview Announcement: HW1 will be out today Lab 0 out webcast out Today: Ch. 2 - Discrete-Time Signals and
EE123 Digital Signal Processing Lecture 2 Discrete Time Systems Today Last time: Administration Overview Announcement: HW1 will be out today Lab 0 out webcast out Today: Ch. 2 - Discrete-Time Signals and
Chapter 2 Time-Domain Representations of LTI Systems
 Chapter 2 Time-Domain Representations of LTI Systems 1 Introduction Impulse responses of LTI systems Linear constant-coefficients differential or difference equations of LTI systems Block diagram representations
Chapter 2 Time-Domain Representations of LTI Systems 1 Introduction Impulse responses of LTI systems Linear constant-coefficients differential or difference equations of LTI systems Block diagram representations
Chap 2. Discrete-Time Signals and Systems
 Digital Signal Processing Chap 2. Discrete-Time Signals and Systems Chang-Su Kim Discrete-Time Signals CT Signal DT Signal Representation 0 4 1 1 1 2 3 Functional representation 1, n 1,3 x[ n] 4, n 2 0,
Digital Signal Processing Chap 2. Discrete-Time Signals and Systems Chang-Su Kim Discrete-Time Signals CT Signal DT Signal Representation 0 4 1 1 1 2 3 Functional representation 1, n 1,3 x[ n] 4, n 2 0,
EEL3135: Homework #4
 EEL335: Homework #4 Problem : For each of the systems below, determine whether or not the system is () linear, () time-invariant, and (3) causal: (a) (b) (c) xn [ ] cos( 04πn) (d) xn [ ] xn [ ] xn [ 5]
EEL335: Homework #4 Problem : For each of the systems below, determine whether or not the system is () linear, () time-invariant, and (3) causal: (a) (b) (c) xn [ ] cos( 04πn) (d) xn [ ] xn [ ] xn [ 5]
Let H(z) = P(z)/Q(z) be the system function of a rational form. Let us represent both P(z) and Q(z) as polynomials of z (not z -1 )
 = P(z)/Q(z) be the system function of a rational form. Let us represent both P(z) and Q(z) as polynomials of z (not z -1 )") Review: Poles and Zeros of Fractional Form Let H() = P()/Q() be the system function of a rational form. Let us represent both P() and Q() as polynomials of (not - ) Then Poles: the roots of Q()=0 Zeros:
Review: Poles and Zeros of Fractional Form Let H() = P()/Q() be the system function of a rational form. Let us represent both P() and Q() as polynomials of (not - ) Then Poles: the roots of Q()=0 Zeros:
Digital Filters Ying Sun
 Digital Filters Ying Sun Digital filters Finite impulse response (FIR filter: h[n] has a finite numbers of terms. Infinite impulse response (IIR filter: h[n] has infinite numbers of terms. Causal filter:
Digital Filters Ying Sun Digital filters Finite impulse response (FIR filter: h[n] has a finite numbers of terms. Infinite impulse response (IIR filter: h[n] has infinite numbers of terms. Causal filter:
Lecture V: Linear difference and differential equations
 Lecture V: Linear difference and differential equations BME 171: Signals and Systems Duke University September 10, 2008 This lecture Plan for the lecture: 1 Discrete-time systems linear difference equations
Lecture V: Linear difference and differential equations BME 171: Signals and Systems Duke University September 10, 2008 This lecture Plan for the lecture: 1 Discrete-time systems linear difference equations
Discrete-Time Systems
 FIR Filters With this chapter we turn to systems as opposed to signals. The systems discussed in this chapter are finite impulse response (FIR) digital filters. The term digital filter arises because these
FIR Filters With this chapter we turn to systems as opposed to signals. The systems discussed in this chapter are finite impulse response (FIR) digital filters. The term digital filter arises because these
Digital Signal Processing, Homework 1, Spring 2013, Prof. C.D. Chung
 Digital Signal Processing, Homework, Spring 203, Prof. C.D. Chung. (0.5%) Page 99, Problem 2.2 (a) The impulse response h [n] of an LTI system is known to be zero, except in the interval N 0 n N. The input
Digital Signal Processing, Homework, Spring 203, Prof. C.D. Chung. (0.5%) Page 99, Problem 2.2 (a) The impulse response h [n] of an LTI system is known to be zero, except in the interval N 0 n N. The input
VU Signal and Image Processing
 052600 VU Signal and Image Processing Torsten Möller + Hrvoje Bogunović + Raphael Sahann torsten.moeller@univie.ac.at hrvoje.bogunovic@meduniwien.ac.at raphael.sahann@univie.ac.at vda.cs.univie.ac.at/teaching/sip/18s/
052600 VU Signal and Image Processing Torsten Möller + Hrvoje Bogunović + Raphael Sahann torsten.moeller@univie.ac.at hrvoje.bogunovic@meduniwien.ac.at raphael.sahann@univie.ac.at vda.cs.univie.ac.at/teaching/sip/18s/
ECE-314 Fall 2012 Review Questions for Midterm Examination II
 ECE-314 Fall 2012 Review Questions for Midterm Examination II First, make sure you study all the problems and their solutions from homework sets 4-7. Then work on the following additional problems. Problem
ECE-314 Fall 2012 Review Questions for Midterm Examination II First, make sure you study all the problems and their solutions from homework sets 4-7. Then work on the following additional problems. Problem
Lecture 2 Discrete-Time LTI Systems: Introduction
 Lecture 2 Discrete-Time LTI Systems: Introduction Outline 2.1 Classification of Systems.............................. 1 2.1.1 Memoryless................................. 1 2.1.2 Causal....................................
Lecture 2 Discrete-Time LTI Systems: Introduction Outline 2.1 Classification of Systems.............................. 1 2.1.1 Memoryless................................. 1 2.1.2 Causal....................................
Chapter 3 Convolution Representation
 Chapter 3 Convolution Representation DT Unit-Impulse Response Consider the DT SISO system: xn [ ] System yn [ ] xn [ ] = δ[ n] If the input signal is and the system has no energy at n = 0, the output yn
Chapter 3 Convolution Representation DT Unit-Impulse Response Consider the DT SISO system: xn [ ] System yn [ ] xn [ ] = δ[ n] If the input signal is and the system has no energy at n = 0, the output yn
Z - Transform. It offers the techniques for digital filter design and frequency analysis of digital signals.
 Z - Transform The z-transform is a very important tool in describing and analyzing digital systems. It offers the techniques for digital filter design and frequency analysis of digital signals. Definition
Z - Transform The z-transform is a very important tool in describing and analyzing digital systems. It offers the techniques for digital filter design and frequency analysis of digital signals. Definition
信號與系統 Signals and Systems
 Spring 2010 信號與系統 Signals and Systems Chapter SS-2 Linear Time-Invariant Systems Feng-Li Lian NTU-EE Feb10 Jun10 Figures and images used in these lecture notes are adopted from Signals & Systems by Alan
Spring 2010 信號與系統 Signals and Systems Chapter SS-2 Linear Time-Invariant Systems Feng-Li Lian NTU-EE Feb10 Jun10 Figures and images used in these lecture notes are adopted from Signals & Systems by Alan
UNIT 1. SIGNALS AND SYSTEM
 Page no: 1 UNIT 1. SIGNALS AND SYSTEM INTRODUCTION A SIGNAL is defined as any physical quantity that changes with time, distance, speed, position, pressure, temperature or some other quantity. A SIGNAL
Page no: 1 UNIT 1. SIGNALS AND SYSTEM INTRODUCTION A SIGNAL is defined as any physical quantity that changes with time, distance, speed, position, pressure, temperature or some other quantity. A SIGNAL
Differential and Difference LTI systems
 Signals and Systems Lecture: 6 Differential and Difference LTI systems Differential and difference linear time-invariant (LTI) systems constitute an extremely important class of systems in engineering.
Signals and Systems Lecture: 6 Differential and Difference LTI systems Differential and difference linear time-invariant (LTI) systems constitute an extremely important class of systems in engineering.
Signals and Systems. Problem Set: The z-transform and DT Fourier Transform
 Signals and Systems Problem Set: The z-transform and DT Fourier Transform Updated: October 9, 7 Problem Set Problem - Transfer functions in MATLAB A discrete-time, causal LTI system is described by the
Signals and Systems Problem Set: The z-transform and DT Fourier Transform Updated: October 9, 7 Problem Set Problem - Transfer functions in MATLAB A discrete-time, causal LTI system is described by the
信號與系統 Signals and Systems
 Spring 2015 信號與系統 Signals and Systems Chapter SS-2 Linear Time-Invariant Systems Feng-Li Lian NTU-EE Feb15 Jun15 Figures and images used in these lecture notes are adopted from Signals & Systems by Alan
Spring 2015 信號與系統 Signals and Systems Chapter SS-2 Linear Time-Invariant Systems Feng-Li Lian NTU-EE Feb15 Jun15 Figures and images used in these lecture notes are adopted from Signals & Systems by Alan
Ch 2: Linear Time-Invariant System
 Ch 2: Linear Time-Invariant System A system is said to be Linear Time-Invariant (LTI) if it possesses the basic system properties of linearity and time-invariance. Consider a system with an output signal
Ch 2: Linear Time-Invariant System A system is said to be Linear Time-Invariant (LTI) if it possesses the basic system properties of linearity and time-invariance. Consider a system with an output signal
Z-Transform. x (n) Sampler
 Sampler") Chapter Two A- Discrete Time Signals: The discrete time signal x(n) is obtained by taking samples of the analog signal xa (t) every Ts seconds as shown in Figure below. Analog signal Discrete time signal
Chapter Two A- Discrete Time Signals: The discrete time signal x(n) is obtained by taking samples of the analog signal xa (t) every Ts seconds as shown in Figure below. Analog signal Discrete time signal
Examples. 2-input, 1-output discrete-time systems: 1-input, 1-output discrete-time systems:
 Discrete-Time s - I Time-Domain Representation CHAPTER 4 These lecture slides are based on "Digital Signal Processing: A Computer-Based Approach, 4th ed." textbook by S.K. Mitra and its instructor materials.
Discrete-Time s - I Time-Domain Representation CHAPTER 4 These lecture slides are based on "Digital Signal Processing: A Computer-Based Approach, 4th ed." textbook by S.K. Mitra and its instructor materials.
Linear Convolution Using FFT
 Linear Convolution Using FFT Another useful property is that we can perform circular convolution and see how many points remain the same as those of linear convolution. When P < L and an L-point circular
Linear Convolution Using FFT Another useful property is that we can perform circular convolution and see how many points remain the same as those of linear convolution. When P < L and an L-point circular
UNIT-II Z-TRANSFORM. This expression is also called a one sided z-transform. This non causal sequence produces positive powers of z in X (z).
.") Page no: 1 UNIT-II Z-TRANSFORM The Z-Transform The direct -transform, properties of the -transform, rational -transforms, inversion of the transform, analysis of linear time-invariant systems in the -
Page no: 1 UNIT-II Z-TRANSFORM The Z-Transform The direct -transform, properties of the -transform, rational -transforms, inversion of the transform, analysis of linear time-invariant systems in the -
Theory and Problems of Signals and Systems
 SCHAUM'S OUTLINES OF Theory and Problems of Signals and Systems HWEI P. HSU is Professor of Electrical Engineering at Fairleigh Dickinson University. He received his B.S. from National Taiwan University
SCHAUM'S OUTLINES OF Theory and Problems of Signals and Systems HWEI P. HSU is Professor of Electrical Engineering at Fairleigh Dickinson University. He received his B.S. from National Taiwan University
Shift Property of z-transform. Lecture 16. More z-transform (Lathi 5.2, ) More Properties of z-transform. Convolution property of z-transform
 More Properties of z-transform. Convolution property of z-transform") Shift Property of -Transform If Lecture 6 More -Transform (Lathi 5.2,5.4-5.5) then which is delay causal signal by sample period. If we delay x[n] first: Peter Cheung Department of Electrical & Electronic
Shift Property of -Transform If Lecture 6 More -Transform (Lathi 5.2,5.4-5.5) then which is delay causal signal by sample period. If we delay x[n] first: Peter Cheung Department of Electrical & Electronic
Interconnection of LTI Systems
 EENG226 Signals and Systems Chapter 2 Time-Domain Representations of Linear Time-Invariant Systems Interconnection of LTI Systems Prof. Dr. Hasan AMCA Electrical and Electronic Engineering Department (ee.emu.edu.tr)
EENG226 Signals and Systems Chapter 2 Time-Domain Representations of Linear Time-Invariant Systems Interconnection of LTI Systems Prof. Dr. Hasan AMCA Electrical and Electronic Engineering Department (ee.emu.edu.tr)
NAME: 23 February 2017 EE301 Signals and Systems Exam 1 Cover Sheet
 NAME: 23 February 2017 EE301 Signals and Systems Exam 1 Cover Sheet Test Duration: 75 minutes Coverage: Chaps 1,2 Open Book but Closed Notes One 85 in x 11 in crib sheet Calculators NOT allowed DO NOT
NAME: 23 February 2017 EE301 Signals and Systems Exam 1 Cover Sheet Test Duration: 75 minutes Coverage: Chaps 1,2 Open Book but Closed Notes One 85 in x 11 in crib sheet Calculators NOT allowed DO NOT
Digital Signal Processing:
 Digital Signal Processing: Mathematical and algorithmic manipulation of discretized and quantized or naturally digital signals in order to extract the most relevant and pertinent information that is carried
Digital Signal Processing: Mathematical and algorithmic manipulation of discretized and quantized or naturally digital signals in order to extract the most relevant and pertinent information that is carried
E : Lecture 1 Introduction
 E85.2607: Lecture 1 Introduction 1 Administrivia 2 DSP review 3 Fun with Matlab E85.2607: Lecture 1 Introduction 2010-01-21 1 / 24 Course overview Advanced Digital Signal Theory Design, analysis, and implementation
E85.2607: Lecture 1 Introduction 1 Administrivia 2 DSP review 3 Fun with Matlab E85.2607: Lecture 1 Introduction 2010-01-21 1 / 24 Course overview Advanced Digital Signal Theory Design, analysis, and implementation
2.161 Signal Processing: Continuous and Discrete Fall 2008
 MIT OpenCourseWare http://ocw.mit.edu 2.161 Signal Processing: Continuous and Discrete Fall 2008 For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms. Massachusetts
MIT OpenCourseWare http://ocw.mit.edu 2.161 Signal Processing: Continuous and Discrete Fall 2008 For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms. Massachusetts
Digital Signal Processing Lecture 9 - Design of Digital Filters - FIR
 Digital Signal Processing - Design of Digital Filters - FIR Electrical Engineering and Computer Science University of Tennessee, Knoxville November 3, 2015 Overview 1 2 3 4 Roadmap Introduction Discrete-time
Digital Signal Processing - Design of Digital Filters - FIR Electrical Engineering and Computer Science University of Tennessee, Knoxville November 3, 2015 Overview 1 2 3 4 Roadmap Introduction Discrete-time
How to manipulate Frequencies in Discrete-time Domain? Two Main Approaches
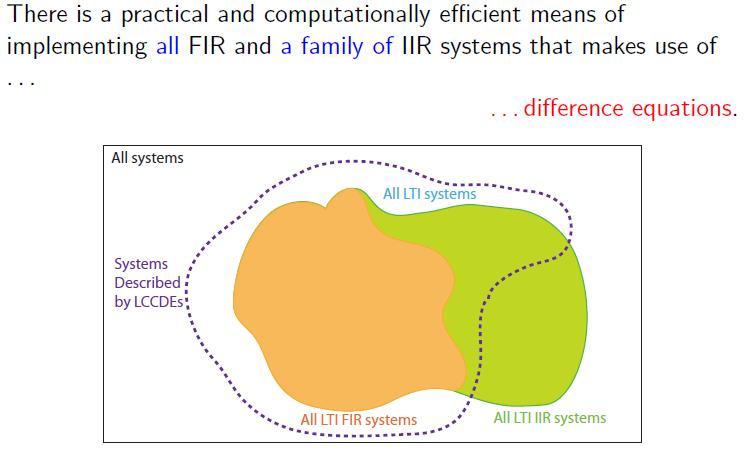
 How to manipulate Frequencies in Discrete-time Domain? Two Main Approaches Difference Equations (an LTI system) x[n]: input, y[n]: output That is, building a system that maes use of the current and previous
How to manipulate Frequencies in Discrete-time Domain? Two Main Approaches Difference Equations (an LTI system) x[n]: input, y[n]: output That is, building a system that maes use of the current and previous
III. Time Domain Analysis of systems
 1 III. Time Domain Analysis of systems Here, we adapt properties of continuous time systems to discrete time systems Section 2.2-2.5, pp 17-39 System Notation y(n) = T[ x(n) ] A. Types of Systems Memoryless
1 III. Time Domain Analysis of systems Here, we adapt properties of continuous time systems to discrete time systems Section 2.2-2.5, pp 17-39 System Notation y(n) = T[ x(n) ] A. Types of Systems Memoryless
ENT 315 Medical Signal Processing CHAPTER 2 DISCRETE FOURIER TRANSFORM. Dr. Lim Chee Chin
 ENT 315 Medical Signal Processing CHAPTER 2 DISCRETE FOURIER TRANSFORM Dr. Lim Chee Chin Outline Introduction Discrete Fourier Series Properties of Discrete Fourier Series Time domain aliasing due to frequency
ENT 315 Medical Signal Processing CHAPTER 2 DISCRETE FOURIER TRANSFORM Dr. Lim Chee Chin Outline Introduction Discrete Fourier Series Properties of Discrete Fourier Series Time domain aliasing due to frequency
The Convolution Sum for Discrete-Time LTI Systems
 The Convolution Sum for Discrete-Time LTI Systems Andrew W. H. House 01 June 004 1 The Basics of the Convolution Sum Consider a DT LTI system, L. x(n) L y(n) DT convolution is based on an earlier result
The Convolution Sum for Discrete-Time LTI Systems Andrew W. H. House 01 June 004 1 The Basics of the Convolution Sum Consider a DT LTI system, L. x(n) L y(n) DT convolution is based on an earlier result
Discrete Time Systems
 1 Discrete Time Systems {x[0], x[1], x[2], } H {y[0], y[1], y[2], } Example: y[n] = 2x[n] + 3x[n-1] + 4x[n-2] 2 FIR and IIR Systems FIR: Finite Impulse Response -- non-recursive y[n] = 2x[n] + 3x[n-1]
1 Discrete Time Systems {x[0], x[1], x[2], } H {y[0], y[1], y[2], } Example: y[n] = 2x[n] + 3x[n-1] + 4x[n-2] 2 FIR and IIR Systems FIR: Finite Impulse Response -- non-recursive y[n] = 2x[n] + 3x[n-1]
Properties of LTI Systems
 Properties of LTI Systems Properties of Continuous Time LTI Systems Systems with or without memory: A system is memory less if its output at any time depends only on the value of the input at that same
Properties of LTI Systems Properties of Continuous Time LTI Systems Systems with or without memory: A system is memory less if its output at any time depends only on the value of the input at that same
EECE 301 Signals & Systems Prof. Mark Fowler
 EECE 3 Signals & Systems Prof. ark Fowler Note Set #28 D-T Systems: DT Filters Ideal & Practical /4 Ideal D-T Filters Just as in the CT case we can specify filters. We looked at the ideal filter for the
EECE 3 Signals & Systems Prof. ark Fowler Note Set #28 D-T Systems: DT Filters Ideal & Practical /4 Ideal D-T Filters Just as in the CT case we can specify filters. We looked at the ideal filter for the
Fourier Series Representation of
 Fourier Series Representation of Periodic Signals Rui Wang, Assistant professor Dept. of Information and Communication Tongji University it Email: ruiwang@tongji.edu.cn Outline The response of LIT system
Fourier Series Representation of Periodic Signals Rui Wang, Assistant professor Dept. of Information and Communication Tongji University it Email: ruiwang@tongji.edu.cn Outline The response of LIT system
ECE4270 Fundamentals of DSP Lecture 20. Fixed-Point Arithmetic in FIR and IIR Filters (part I) Overview of Lecture. Overflow. FIR Digital Filter
 Overview of Lecture. Overflow. FIR Digital Filter") ECE4270 Fundamentals of DSP Lecture 20 Fixed-Point Arithmetic in FIR and IIR Filters (part I) School of ECE Center for Signal and Information Processing Georgia Institute of Technology Overview of Lecture
ECE4270 Fundamentals of DSP Lecture 20 Fixed-Point Arithmetic in FIR and IIR Filters (part I) School of ECE Center for Signal and Information Processing Georgia Institute of Technology Overview of Lecture
APPLIED SIGNAL PROCESSING
 APPLIED SIGNAL PROCESSING DIGITAL FILTERS Digital filters are discrete-time linear systems { x[n] } G { y[n] } Impulse response: y[n] = h[0]x[n] + h[1]x[n 1] + 2 DIGITAL FILTER TYPES FIR (Finite Impulse
APPLIED SIGNAL PROCESSING DIGITAL FILTERS Digital filters are discrete-time linear systems { x[n] } G { y[n] } Impulse response: y[n] = h[0]x[n] + h[1]x[n 1] + 2 DIGITAL FILTER TYPES FIR (Finite Impulse
Discrete-Time David Johns and Ken Martin University of Toronto
 Discrete-Time David Johns and Ken Martin University of Toronto (johns@eecg.toronto.edu) (martin@eecg.toronto.edu) University of Toronto 1 of 40 Overview of Some Signal Spectra x c () t st () x s () t xn
Discrete-Time David Johns and Ken Martin University of Toronto (johns@eecg.toronto.edu) (martin@eecg.toronto.edu) University of Toronto 1 of 40 Overview of Some Signal Spectra x c () t st () x s () t xn
EECE 301 Signals & Systems
 EECE 30 Signals & Systems Prof. Mark Fowler Note Set #22 D-T Systems: DT Systems & Difference Equations / D-T System Models So far we ve seen how to use the FT to analyze circuits Use phasors and standard
EECE 30 Signals & Systems Prof. Mark Fowler Note Set #22 D-T Systems: DT Systems & Difference Equations / D-T System Models So far we ve seen how to use the FT to analyze circuits Use phasors and standard
R13 SET - 1
 R13 SET - 1 III B. Tech II Semester Regular Examinations, April - 2016 DIGITAL SIGNAL PROCESSING (Electronics and Communication Engineering) Time: 3 hours Maximum Marks: 70 Note: 1. Question Paper consists
R13 SET - 1 III B. Tech II Semester Regular Examinations, April - 2016 DIGITAL SIGNAL PROCESSING (Electronics and Communication Engineering) Time: 3 hours Maximum Marks: 70 Note: 1. Question Paper consists
EE482: Digital Signal Processing Applications
 Professor Brendan Morris, SEB 3216, brendan.morris@unlv.edu EE482: Digital Signal Processing Applications Spring 2014 TTh 14:30-15:45 CBC C222 Lecture 02 DSP Fundamentals 14/01/21 http://www.ee.unlv.edu/~b1morris/ee482/
Professor Brendan Morris, SEB 3216, brendan.morris@unlv.edu EE482: Digital Signal Processing Applications Spring 2014 TTh 14:30-15:45 CBC C222 Lecture 02 DSP Fundamentals 14/01/21 http://www.ee.unlv.edu/~b1morris/ee482/
5. Time-Domain Analysis of Discrete-Time Signals and Systems
 5. Time-Domain Analysis of Discrete-Time Signals and Systems 5.1. Impulse Sequence (1.4.1) 5.2. Convolution Sum (2.1) 5.3. Discrete-Time Impulse Response (2.1) 5.4. Classification of a Linear Time-Invariant
5. Time-Domain Analysis of Discrete-Time Signals and Systems 5.1. Impulse Sequence (1.4.1) 5.2. Convolution Sum (2.1) 5.3. Discrete-Time Impulse Response (2.1) 5.4. Classification of a Linear Time-Invariant
Digital Signal Processing Lecture 10 - Discrete Fourier Transform
 Digital Signal Processing - Discrete Fourier Transform Electrical Engineering and Computer Science University of Tennessee, Knoxville November 12, 2015 Overview 1 2 3 4 Review - 1 Introduction Discrete-time
Digital Signal Processing - Discrete Fourier Transform Electrical Engineering and Computer Science University of Tennessee, Knoxville November 12, 2015 Overview 1 2 3 4 Review - 1 Introduction Discrete-time
Lecture 7 Discrete Systems
 Lecture 7 Discrete Systems EE 52: Instrumentation and Measurements Lecture Notes Update on November, 29 Aly El-Osery, Electrical Engineering Dept., New Mexico Tech 7. Contents The z-transform 2 Linear
Lecture 7 Discrete Systems EE 52: Instrumentation and Measurements Lecture Notes Update on November, 29 Aly El-Osery, Electrical Engineering Dept., New Mexico Tech 7. Contents The z-transform 2 Linear
considered to be the elements of a column vector as follows 1.2 Discrete-time signals
 Chapter 1 Signals and Systems 1.1 Introduction In this chapter we begin our study of digital signal processing by developing the notion of a discretetime signal and a discrete-time system. We will concentrate
Chapter 1 Signals and Systems 1.1 Introduction In this chapter we begin our study of digital signal processing by developing the notion of a discretetime signal and a discrete-time system. We will concentrate
LECTURE NOTES DIGITAL SIGNAL PROCESSING III B.TECH II SEMESTER (JNTUK R 13)
") LECTURE NOTES ON DIGITAL SIGNAL PROCESSING III B.TECH II SEMESTER (JNTUK R 13) FACULTY : B.V.S.RENUKA DEVI (Asst.Prof) / Dr. K. SRINIVASA RAO (Assoc. Prof) DEPARTMENT OF ELECTRONICS AND COMMUNICATIONS
LECTURE NOTES ON DIGITAL SIGNAL PROCESSING III B.TECH II SEMESTER (JNTUK R 13) FACULTY : B.V.S.RENUKA DEVI (Asst.Prof) / Dr. K. SRINIVASA RAO (Assoc. Prof) DEPARTMENT OF ELECTRONICS AND COMMUNICATIONS
Lecture 2. Introduction to Systems (Lathi )
") Lecture 2 Introduction to Systems (Lathi 1.6-1.8) Pier Luigi Dragotti Department of Electrical & Electronic Engineering Imperial College London URL: www.commsp.ee.ic.ac.uk/~pld/teaching/ E-mail: p.dragotti@imperial.ac.uk
Lecture 2 Introduction to Systems (Lathi 1.6-1.8) Pier Luigi Dragotti Department of Electrical & Electronic Engineering Imperial College London URL: www.commsp.ee.ic.ac.uk/~pld/teaching/ E-mail: p.dragotti@imperial.ac.uk
Discrete-Time Fourier Transform (DTFT)
") Discrete-Time Fourier Transform (DTFT) 1 Preliminaries Definition: The Discrete-Time Fourier Transform (DTFT) of a signal x[n] is defined to be X(e jω ) x[n]e jωn. (1) In other words, the DTFT of x[n]
Discrete-Time Fourier Transform (DTFT) 1 Preliminaries Definition: The Discrete-Time Fourier Transform (DTFT) of a signal x[n] is defined to be X(e jω ) x[n]e jωn. (1) In other words, the DTFT of x[n]
Discrete-Time Signals and Systems. The z-transform and Its Application. The Direct z-transform. Region of Convergence. Reference: Sections
 Discrete-Time Signals and Systems The z-transform and Its Application Dr. Deepa Kundur University of Toronto Reference: Sections 3. - 3.4 of John G. Proakis and Dimitris G. Manolakis, Digital Signal Processing:
Discrete-Time Signals and Systems The z-transform and Its Application Dr. Deepa Kundur University of Toronto Reference: Sections 3. - 3.4 of John G. Proakis and Dimitris G. Manolakis, Digital Signal Processing:
ECE 301 Division 1 Exam 1 Solutions, 10/6/2011, 8-9:45pm in ME 1061.
 ECE 301 Division 1 Exam 1 Solutions, 10/6/011, 8-9:45pm in ME 1061. Your ID will be checked during the exam. Please bring a No. pencil to fill out the answer sheet. This is a closed-book exam. No calculators
ECE 301 Division 1 Exam 1 Solutions, 10/6/011, 8-9:45pm in ME 1061. Your ID will be checked during the exam. Please bring a No. pencil to fill out the answer sheet. This is a closed-book exam. No calculators
Discrete-Time Signals & Systems
 Chapter 2 Discrete-Time Signals & Systems 清大電機系林嘉文 cwlin@ee.nthu.edu.tw 03-5731152 Original PowerPoint slides prepared by S. K. Mitra 2-1-1 Discrete-Time Signals: Time-Domain Representation (1/10) Signals
Chapter 2 Discrete-Time Signals & Systems 清大電機系林嘉文 cwlin@ee.nthu.edu.tw 03-5731152 Original PowerPoint slides prepared by S. K. Mitra 2-1-1 Discrete-Time Signals: Time-Domain Representation (1/10) Signals
Lecture 18: Stability
 Lecture 18: Stability ECE 401: Signal and Image Analysis University of Illinois 4/18/2017 1 Stability 2 Impulse Response 3 Z Transform Outline 1 Stability 2 Impulse Response 3 Z Transform BIBO Stability
Lecture 18: Stability ECE 401: Signal and Image Analysis University of Illinois 4/18/2017 1 Stability 2 Impulse Response 3 Z Transform Outline 1 Stability 2 Impulse Response 3 Z Transform BIBO Stability
Discrete-time Signals and Systems in
 Discrete-time Signals and Systems in the Frequency Domain Chapter 3, Sections 3.1-39 3.9 Chapter 4, Sections 4.8-4.9 Dr. Iyad Jafar Outline Introduction The Continuous-Time FourierTransform (CTFT) The
Discrete-time Signals and Systems in the Frequency Domain Chapter 3, Sections 3.1-39 3.9 Chapter 4, Sections 4.8-4.9 Dr. Iyad Jafar Outline Introduction The Continuous-Time FourierTransform (CTFT) The
Discrete Time Signals and Systems Time-frequency Analysis. Gloria Menegaz
 Discrete Time Signals and Systems Time-frequency Analysis Gloria Menegaz Time-frequency Analysis Fourier transform (1D and 2D) Reference textbook: Discrete time signal processing, A.W. Oppenheim and R.W.
Discrete Time Signals and Systems Time-frequency Analysis Gloria Menegaz Time-frequency Analysis Fourier transform (1D and 2D) Reference textbook: Discrete time signal processing, A.W. Oppenheim and R.W.
EECE 301 Signals & Systems Prof. Mark Fowler
 EECE 30 Signals & Systems Prof. Mark Fowler Note Set #26 D-T Systems: Transfer Function and Frequency Response / Finding the Transfer Function from Difference Eq. Recall: we found a DT system s freq. resp.
EECE 30 Signals & Systems Prof. Mark Fowler Note Set #26 D-T Systems: Transfer Function and Frequency Response / Finding the Transfer Function from Difference Eq. Recall: we found a DT system s freq. resp.
Digital Filter Structures. Basic IIR Digital Filter Structures. of an LTI digital filter is given by the convolution sum or, by the linear constant
 Digital Filter Chapter 8 Digital Filter Block Diagram Representation Equivalent Basic FIR Digital Filter Basic IIR Digital Filter. Block Diagram Representation In the time domain, the input-output relations
Digital Filter Chapter 8 Digital Filter Block Diagram Representation Equivalent Basic FIR Digital Filter Basic IIR Digital Filter. Block Diagram Representation In the time domain, the input-output relations
DHANALAKSHMI COLLEGE OF ENGINEERING DEPARTMENT OF ELECTRICAL AND ELECTRONICS ENGINEERING EC2314- DIGITAL SIGNAL PROCESSING UNIT I INTRODUCTION PART A
 DHANALAKSHMI COLLEGE OF ENGINEERING DEPARTMENT OF ELECTRICAL AND ELECTRONICS ENGINEERING EC2314- DIGITAL SIGNAL PROCESSING UNIT I INTRODUCTION PART A Classification of systems : Continuous and Discrete
DHANALAKSHMI COLLEGE OF ENGINEERING DEPARTMENT OF ELECTRICAL AND ELECTRONICS ENGINEERING EC2314- DIGITAL SIGNAL PROCESSING UNIT I INTRODUCTION PART A Classification of systems : Continuous and Discrete
Analog LTI system Digital LTI system
 Sampling Decimation Seismometer Amplifier AAA filter DAA filter Analog LTI system Digital LTI system Filtering (Digital Systems) input output filter xn [ ] X ~ [ k] Convolution of Sequences hn [ ] yn [
Sampling Decimation Seismometer Amplifier AAA filter DAA filter Analog LTI system Digital LTI system Filtering (Digital Systems) input output filter xn [ ] X ~ [ k] Convolution of Sequences hn [ ] yn [
( ) John A. Quinn Lecture. ESE 531: Digital Signal Processing. Lecture Outline. Frequency Response of LTI System. Example: Zero on Real Axis
 John A. Quinn Lecture. ESE 531: Digital Signal Processing. Lecture Outline. Frequency Response of LTI System. Example: Zero on Real Axis") John A. Quinn Lecture ESE 531: Digital Signal Processing Lec 15: March 21, 2017 Review, Generalized Linear Phase Systems Penn ESE 531 Spring 2017 Khanna Lecture Outline!!! 2 Frequency Response of LTI System
John A. Quinn Lecture ESE 531: Digital Signal Processing Lec 15: March 21, 2017 Review, Generalized Linear Phase Systems Penn ESE 531 Spring 2017 Khanna Lecture Outline!!! 2 Frequency Response of LTI System
Lecture 2 OKAN UNIVERSITY FACULTY OF ENGINEERING AND ARCHITECTURE
 OKAN UNIVERSITY FACULTY OF ENGINEERING AND ARCHITECTURE EEE 43 DIGITAL SIGNAL PROCESSING (DSP) 2 DIFFERENCE EQUATIONS AND THE Z- TRANSFORM FALL 22 Yrd. Doç. Dr. Didem Kivanc Tureli didemk@ieee.org didem.kivanc@okan.edu.tr
OKAN UNIVERSITY FACULTY OF ENGINEERING AND ARCHITECTURE EEE 43 DIGITAL SIGNAL PROCESSING (DSP) 2 DIFFERENCE EQUATIONS AND THE Z- TRANSFORM FALL 22 Yrd. Doç. Dr. Didem Kivanc Tureli didemk@ieee.org didem.kivanc@okan.edu.tr
UNIT - III PART A. 2. Mention any two techniques for digitizing the transfer function of an analog filter?
 UNIT - III PART A. Mention the important features of the IIR filters? i) The physically realizable IIR filters does not have linear phase. ii) The IIR filter specification includes the desired characteristics
UNIT - III PART A. Mention the important features of the IIR filters? i) The physically realizable IIR filters does not have linear phase. ii) The IIR filter specification includes the desired characteristics
Signals and Systems. Spring Room 324, Geology Palace, ,
 Signals and Systems Spring 2013 Room 324, Geology Palace, 13756569051, zhukaiguang@jlu.edu.cn Chapter 10 The Z-Transform 1) Z-Transform 2) Properties of the ROC of the z-transform 3) Inverse z-transform
Signals and Systems Spring 2013 Room 324, Geology Palace, 13756569051, zhukaiguang@jlu.edu.cn Chapter 10 The Z-Transform 1) Z-Transform 2) Properties of the ROC of the z-transform 3) Inverse z-transform
University Question Paper Solution
 Unit 1: Introduction University Question Paper Solution 1. Determine whether the following systems are: i) Memoryless, ii) Stable iii) Causal iv) Linear and v) Time-invariant. i) y(n)= nx(n) ii) y(t)=
Unit 1: Introduction University Question Paper Solution 1. Determine whether the following systems are: i) Memoryless, ii) Stable iii) Causal iv) Linear and v) Time-invariant. i) y(n)= nx(n) ii) y(t)=
hapter 8 Simulation/Realization 8 Introduction Given an nth-order state-space description of the form x_ (t) = f (x(t) u(t) t) (state evolution equati
 = f (x(t) u(t) t) (state evolution equati") Lectures on Dynamic Systems and ontrol Mohammed Dahleh Munther Dahleh George Verghese Department of Electrical Engineering and omputer Science Massachuasetts Institute of Technology c hapter 8 Simulation/Realization
Lectures on Dynamic Systems and ontrol Mohammed Dahleh Munther Dahleh George Verghese Department of Electrical Engineering and omputer Science Massachuasetts Institute of Technology c hapter 8 Simulation/Realization
ECE503: Digital Signal Processing Lecture 6
 ECE503: Digital Signal Processing Lecture 6 D. Richard Brown III WPI 20-February-2012 WPI D. Richard Brown III 20-February-2012 1 / 28 Lecture 6 Topics 1. Filter structures overview 2. FIR filter structures
ECE503: Digital Signal Processing Lecture 6 D. Richard Brown III WPI 20-February-2012 WPI D. Richard Brown III 20-February-2012 1 / 28 Lecture 6 Topics 1. Filter structures overview 2. FIR filter structures
Discrete Time Systems
 Discrete Time Systems Valentina Hubeika, Jan Černocký DCGM FIT BUT Brno, {ihubeika,cernocky}@fit.vutbr.cz 1 LTI systems In this course, we work only with linear and time-invariant systems. We talked about
Discrete Time Systems Valentina Hubeika, Jan Černocký DCGM FIT BUT Brno, {ihubeika,cernocky}@fit.vutbr.cz 1 LTI systems In this course, we work only with linear and time-invariant systems. We talked about
ELEG 305: Digital Signal Processing
 ELEG 305: Digital Signal Processing Lecture : Design of Digital IIR Filters (Part I) Kenneth E. Barner Department of Electrical and Computer Engineering University of Delaware Fall 008 K. E. Barner (Univ.
ELEG 305: Digital Signal Processing Lecture : Design of Digital IIR Filters (Part I) Kenneth E. Barner Department of Electrical and Computer Engineering University of Delaware Fall 008 K. E. Barner (Univ.
# FIR. [ ] = b k. # [ ]x[ n " k] [ ] = h k. x[ n] = Ae j" e j# ˆ n Complex exponential input. [ ]Ae j" e j ˆ. ˆ )Ae j# e j ˆ. y n. y n.
![# FIR. [ ] = b k. # [ ]x[ n k] [ ] = h k. x[ n] = Ae j e j# ˆ n Complex exponential input. [ ]Ae j e j ˆ. ˆ )Ae j# e j ˆ. y n. y n.](/thumbs/88/116624032.jpg "# FIR. [ ] = b k. # [ ]x[ n k] [ ] = h k. x[ n] = Ae j e j# ˆ n Complex exponential input. [ ]Ae j e j ˆ. ˆ )Ae j# e j ˆ. y n. y n.") [ ] = h k M [ ] = b k x[ n " k] FIR k= M [ ]x[ n " k] convolution k= x[ n] = Ae j" e j ˆ n Complex exponential input [ ] = h k M % k= [ ]Ae j" e j ˆ % M = ' h[ k]e " j ˆ & k= k = H (" ˆ )Ae j e j ˆ ( )
[ ] = h k M [ ] = b k x[ n " k] FIR k= M [ ]x[ n " k] convolution k= x[ n] = Ae j" e j ˆ n Complex exponential input [ ] = h k M % k= [ ]Ae j" e j ˆ % M = ' h[ k]e " j ˆ & k= k = H (" ˆ )Ae j e j ˆ ( )
x(l!) = g(n) k=-oo x(n) * hen) = hen) * x(n)
 = g(n) k=-oo x(n) * hen) = hen) * x(n)") CHAP. 1] SIGNALS AND SYSTEMS 11 Invertibllity A system property that is important in applications such as channel equalization and deconvolution is illvertibility. A system is said to be invertible if
CHAP. 1] SIGNALS AND SYSTEMS 11 Invertibllity A system property that is important in applications such as channel equalization and deconvolution is illvertibility. A system is said to be invertible if
/ (2π) X(e jω ) dω. 4. An 8 point sequence is given by x(n) = {2,2,2,2,1,1,1,1}. Compute 8 point DFT of x(n) by
 X(e jω ) dω. 4. An 8 point sequence is given by x(n) = {2,2,2,2,1,1,1,1}. Compute 8 point DFT of x(n) by") Code No: RR320402 Set No. 1 III B.Tech II Semester Regular Examinations, Apr/May 2006 DIGITAL SIGNAL PROCESSING ( Common to Electronics & Communication Engineering, Electronics & Instrumentation Engineering,
Code No: RR320402 Set No. 1 III B.Tech II Semester Regular Examinations, Apr/May 2006 DIGITAL SIGNAL PROCESSING ( Common to Electronics & Communication Engineering, Electronics & Instrumentation Engineering,
EE123 Digital Signal Processing
 EE123 Digital Signal Processing Lecture 2A D.T Systems D. T. Fourier Transform A couple of things Read Ch 2 2.0-2.9 It s OK to use 2nd edition My office hours: posted on-line W 4-5pm Cory 506 ham radio
EE123 Digital Signal Processing Lecture 2A D.T Systems D. T. Fourier Transform A couple of things Read Ch 2 2.0-2.9 It s OK to use 2nd edition My office hours: posted on-line W 4-5pm Cory 506 ham radio
ELEG 305: Digital Signal Processing
 ELEG 305: Digital Signal Processing Lecture 18: Applications of FFT Algorithms & Linear Filtering DFT Computation; Implementation of Discrete Time Systems Kenneth E. Barner Department of Electrical and
ELEG 305: Digital Signal Processing Lecture 18: Applications of FFT Algorithms & Linear Filtering DFT Computation; Implementation of Discrete Time Systems Kenneth E. Barner Department of Electrical and
EE 521: Instrumentation and Measurements
 Aly El-Osery Electrical Engineering Department, New Mexico Tech Socorro, New Mexico, USA November 1, 2009 1 / 27 1 The z-transform 2 Linear Time-Invariant System 3 Filter Design IIR Filters FIR Filters
Aly El-Osery Electrical Engineering Department, New Mexico Tech Socorro, New Mexico, USA November 1, 2009 1 / 27 1 The z-transform 2 Linear Time-Invariant System 3 Filter Design IIR Filters FIR Filters
Lecture 5 - Assembly Programming(II), Intro to Digital Filters
, Intro to Digital Filters") GoBack Lecture 5 - Assembly Programming(II), Intro to Digital Filters James Barnes (James.Barnes@colostate.edu) Spring 2009 Colorado State University Dept of Electrical and Computer Engineering ECE423
GoBack Lecture 5 - Assembly Programming(II), Intro to Digital Filters James Barnes (James.Barnes@colostate.edu) Spring 2009 Colorado State University Dept of Electrical and Computer Engineering ECE423
EE123 Digital Signal Processing
 EE123 Digital Signal Processing Lecture 2B D. T. Fourier Transform M. Lustig, EECS UC Berkeley Something Fun gotenna http://www.gotenna.com/# Text messaging radio Bluetooth phone interface MURS VHF radio
EE123 Digital Signal Processing Lecture 2B D. T. Fourier Transform M. Lustig, EECS UC Berkeley Something Fun gotenna http://www.gotenna.com/# Text messaging radio Bluetooth phone interface MURS VHF radio
Very useful for designing and analyzing signal processing systems
 z-transform z-transform The z-transform generalizes the Discrete-Time Fourier Transform (DTFT) for analyzing infinite-length signals and systems Very useful for designing and analyzing signal processing
z-transform z-transform The z-transform generalizes the Discrete-Time Fourier Transform (DTFT) for analyzing infinite-length signals and systems Very useful for designing and analyzing signal processing
Review of Discrete-Time System
 Review of Discrete-Time System Electrical & Computer Engineering University of Maryland, College Park Acknowledgment: ENEE630 slides were based on class notes developed by Profs. K.J. Ray Liu and Min Wu.
Review of Discrete-Time System Electrical & Computer Engineering University of Maryland, College Park Acknowledgment: ENEE630 slides were based on class notes developed by Profs. K.J. Ray Liu and Min Wu.
Therefore the new Fourier coefficients are. Module 2 : Signals in Frequency Domain Problem Set 2. Problem 1
 Module 2 : Signals in Frequency Domain Problem Set 2 Problem 1 Let be a periodic signal with fundamental period T and Fourier series coefficients. Derive the Fourier series coefficients of each of the
Module 2 : Signals in Frequency Domain Problem Set 2 Problem 1 Let be a periodic signal with fundamental period T and Fourier series coefficients. Derive the Fourier series coefficients of each of the