EE123 Digital Signal Processing. M. Lustig, EECS UC Berkeley
|
|
|
- Britton Alexander
- 6 years ago
- Views:
Transcription

1 EE123 Digital Signal Processing
2 Today Last time: DTFT - Ch 2 Today: Continue DTFT Z-Transform Ch. 3

3 Properties of the DTFT cont. Time-Freq Shifting/modulation: M. Lustig, EE123 UCB





4 M. Lustig, EE123 UCB

5 Frequency Response of LTI Systems Check response to a pure frequency: 0 LTI M. Lustig, EE123 UCB
6 Frequency Response of LTI Systems Check response to a pure frequency: 0 LTI Output is the same pure frequency, scaled and phase-shifted! is an eigen function of LTI systems M. Lustig, EE123 UCB Recall eigen vectors satisfy:

7 Example 3 Frequency response of a causal moving average filter Q: What type of filter is it? A: Low-Pass 0 M n M. Lustig, EE123 UCB
8 Example 3 Cont. Frequency response of a causal moving average filter Same as example 1, only: Shifted by N, divided by M+1, M=2N M. Lustig, EE123 UCB
9 Example 3 Cont. Frequency response of a causal moving average filter Not a sinc! 1 M. Lustig, EE123 UCB
10 Example 4: Impulse Response of an Ideal Low-Pass Filter M. Lustig, EE123 UCB

11 Example 4 Impulse Response of an Ideal Low-Pass Filter M. Lustig, EE123 UCB

12 Example 4 Impulse Response of an Ideal Low-Pass Filter sampled sinc Non causal! Truncate and shift right to make causal M. Lustig, EE123 UCB
13 Example 4 Impulse Response of an Ideal Low-Pass Filter Non causal! Truncate and shift right to make causal How does it changes the frequency response? Truncation: property 2.9.7: Periodic convolution M. Lustig, EE123 UCB
14 Example 4 We get smearing of the frequency response We get rippling M. Lustig, EE123 UCB
15 The z-transform Used for: Analysis of LTI systems Solving difference equations Determining system stability Finding frequency response of stable systems


![h[n]: We already](/docs-images/72/66518154/images/16-2.jpg "showed that are")
16 Eigen Functions of LTI Systems Consider an LTI system with impulse response h[n]: We already showed that are eigen-functions What if
![Eigen Functions of LTI Systems x[n] = z n are also eigen-functions of LTI](/docs-images/72/66518154/images/17-0.jpg "Systems H(z) is called a transfer function H(z) exists for larger class of")
17 Eigen Functions of LTI Systems x[n] = z n are also eigen-functions of LTI Systems H(z) is called a transfer function H(z) exists for larger class of h[n] than

18 The z Transform Since z=re jω

19 Region of Convergence (ROC) The ROC is a set of values of z for which the sum Converges.
")

20 Region of Convergence (ROC) Example 1: Right-sided sequence recall: So:

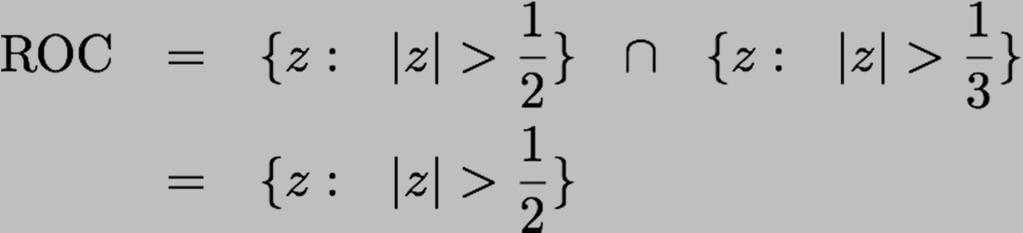
21 Region of Convergence (ROC) Example 2:

22 Region of Convergence (ROC) Example 3: Left sided sequence if a -1 z < 1, i.e, z < a then,

23 Region of Convergence (ROC) Expression is the same as Example 1! ROC = {z: z < a } is different The z-transform without ROC does not uniquely define a sequence!
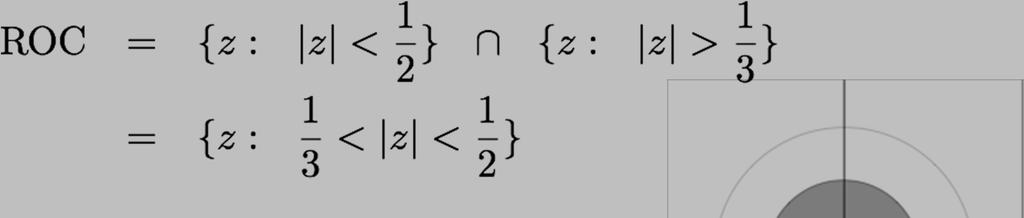


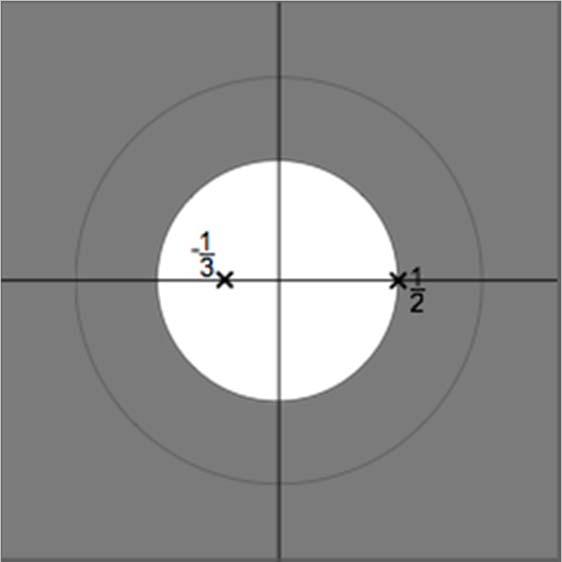
24 Region of Convergence (ROC) Example 4: Same as example 2
 Example 5: Example")
25 Region of Convergence (ROC) Example 5: Example 6:
 Example 7: Finite")

26 Region of Convergence (ROC) Example 7: Finite sequence Finite, always converges Zero cancels pole
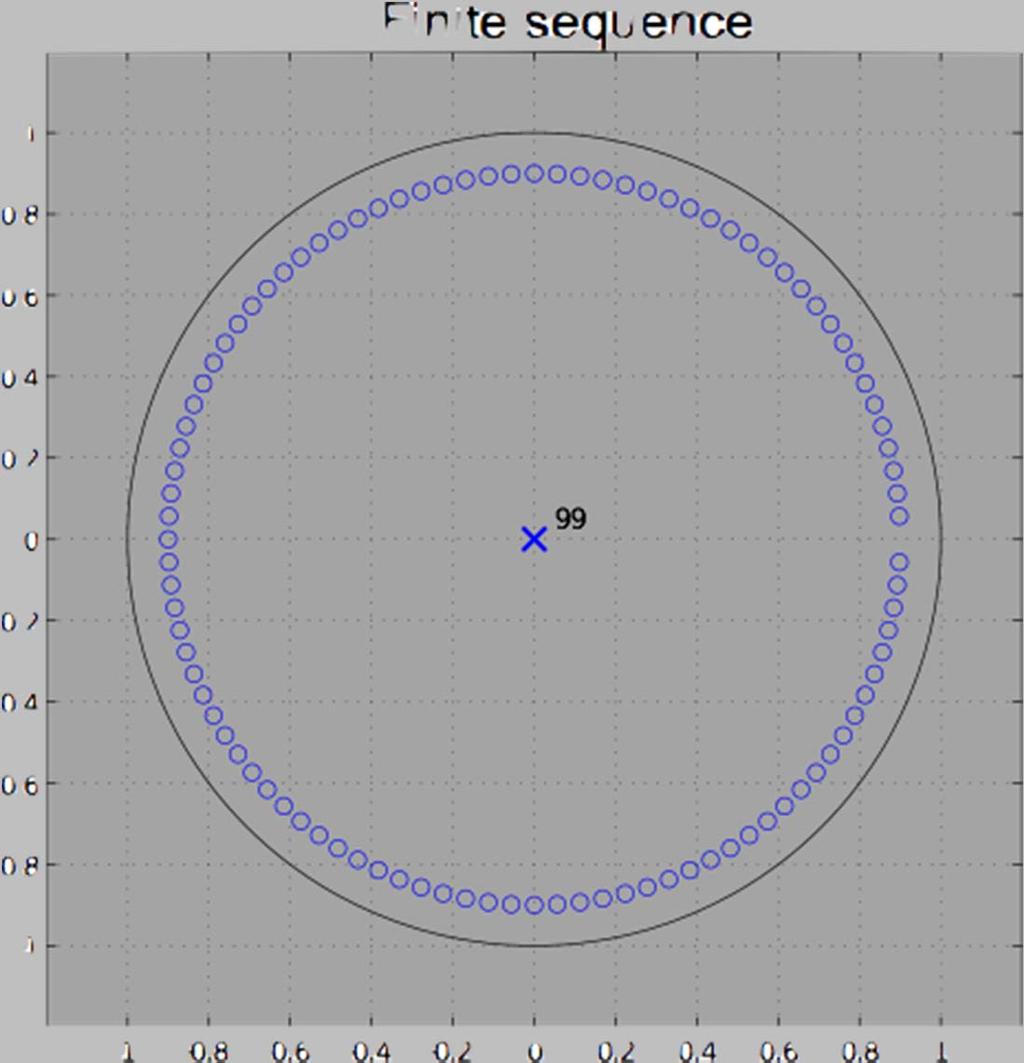
27 Region of Convergence (ROC) finite sequence
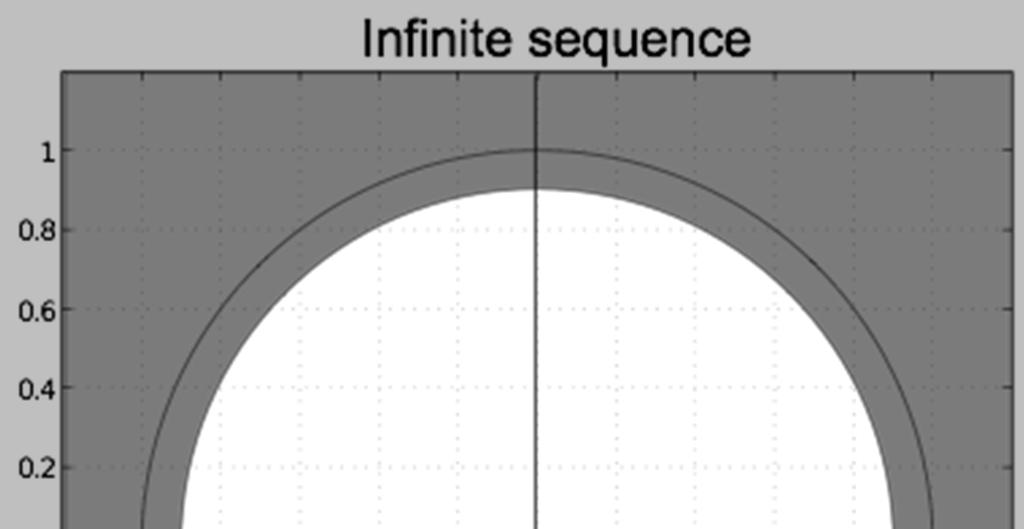
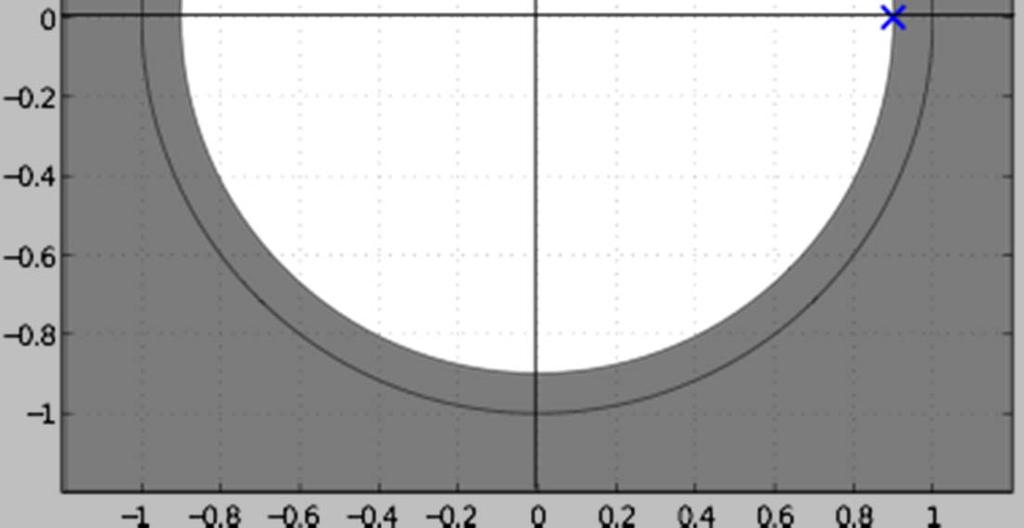
28 Properties of ROC A ring or a disk in Z-plane, centered at the origin DTFT converges iff ROC includes the unit circle ROC can t contain poles


29 Properties of ROC For finite duration sequences, ROC is the entire z-plane, except possibly z=0, z=
30 Example: w[n] window -N N Z transform: What is the ROC? M. Lustig, EE123 UCB
31 Properties of the ROC For right-sided sequences: ROC extends outward from the outermost pole to infinity Examples 1,2 For left-sided: inwards from inner most pole to zero Example 3 For two-sided, ROC is a ring - or do not exist Examples 4,5,6


32 Several Properties of the Z-transform ROC at least ROCx ROCy
")

33 Inversion of the z-transform In general, by contour integration within the ROC Ways to avoid it: Inspection (known transforms) Properties of the z-transform Power series expansion Partial fraction expansion Residue theorem Most useful is the inverse of rational polynomials Why?

34 Cool DSP: Phase Vocoder, aka autotune Shifts the frequency and time domains of audio signals using phase information Uses the DFT, which we will discuss next time!
The Z-Transform. Fall 2012, EE123 Digital Signal Processing. Eigen Functions of LTI System. Eigen Functions of LTI System
 The Z-Transform Fall 202, EE2 Digital Signal Processing Lecture 4 September 4, 202 Used for: Analysis of LTI systems Solving di erence equations Determining system stability Finding frequency response
The Z-Transform Fall 202, EE2 Digital Signal Processing Lecture 4 September 4, 202 Used for: Analysis of LTI systems Solving di erence equations Determining system stability Finding frequency response
The Z transform (2) 1
 1") The Z transform (2) 1 Today Properties of the region of convergence (3.2) Read examples 3.7, 3.8 Announcements: ELEC 310 FINAL EXAM: April 14 2010, 14:00 pm ECS 123 Assignment 2 due tomorrow by 4:00 pm
The Z transform (2) 1 Today Properties of the region of convergence (3.2) Read examples 3.7, 3.8 Announcements: ELEC 310 FINAL EXAM: April 14 2010, 14:00 pm ECS 123 Assignment 2 due tomorrow by 4:00 pm
ESE 531: Digital Signal Processing
 ESE 531: Digital Signal Processing Lec 6: January 30, 2018 Inverse z-transform Lecture Outline! z-transform " Tie up loose ends " Regions of convergence properties! Inverse z-transform " Inspection " Partial
ESE 531: Digital Signal Processing Lec 6: January 30, 2018 Inverse z-transform Lecture Outline! z-transform " Tie up loose ends " Regions of convergence properties! Inverse z-transform " Inspection " Partial
Signals and Systems. Spring Room 324, Geology Palace, ,
 Signals and Systems Spring 2013 Room 324, Geology Palace, 13756569051, zhukaiguang@jlu.edu.cn Chapter 10 The Z-Transform 1) Z-Transform 2) Properties of the ROC of the z-transform 3) Inverse z-transform
Signals and Systems Spring 2013 Room 324, Geology Palace, 13756569051, zhukaiguang@jlu.edu.cn Chapter 10 The Z-Transform 1) Z-Transform 2) Properties of the ROC of the z-transform 3) Inverse z-transform
ESE 531: Digital Signal Processing
 ESE 531: Digital Signal Processing Lec 6: January 31, 2017 Inverse z-transform Lecture Outline! z-transform " Tie up loose ends " Regions of convergence properties! Inverse z-transform " Inspection " Partial
ESE 531: Digital Signal Processing Lec 6: January 31, 2017 Inverse z-transform Lecture Outline! z-transform " Tie up loose ends " Regions of convergence properties! Inverse z-transform " Inspection " Partial
Let H(z) = P(z)/Q(z) be the system function of a rational form. Let us represent both P(z) and Q(z) as polynomials of z (not z -1 )
 = P(z)/Q(z) be the system function of a rational form. Let us represent both P(z) and Q(z) as polynomials of z (not z -1 )") Review: Poles and Zeros of Fractional Form Let H() = P()/Q() be the system function of a rational form. Let us represent both P() and Q() as polynomials of (not - ) Then Poles: the roots of Q()=0 Zeros:
Review: Poles and Zeros of Fractional Form Let H() = P()/Q() be the system function of a rational form. Let us represent both P() and Q() as polynomials of (not - ) Then Poles: the roots of Q()=0 Zeros:
SIGNALS AND SYSTEMS. Unit IV. Analysis of DT signals
 SIGNALS AND SYSTEMS Unit IV Analysis of DT signals Contents: 4.1 Discrete Time Fourier Transform 4.2 Discrete Fourier Transform 4.3 Z Transform 4.4 Properties of Z Transform 4.5 Relationship between Z
SIGNALS AND SYSTEMS Unit IV Analysis of DT signals Contents: 4.1 Discrete Time Fourier Transform 4.2 Discrete Fourier Transform 4.3 Z Transform 4.4 Properties of Z Transform 4.5 Relationship between Z
Chapter Intended Learning Outcomes: (i) Understanding the relationship between transform and the Fourier transform for discrete-time signals
 Understanding the relationship between transform and the Fourier transform for discrete-time signals") z Transform Chapter Intended Learning Outcomes: (i) Understanding the relationship between transform and the Fourier transform for discrete-time signals (ii) Understanding the characteristics and properties
z Transform Chapter Intended Learning Outcomes: (i) Understanding the relationship between transform and the Fourier transform for discrete-time signals (ii) Understanding the characteristics and properties
(i) Represent discrete-time signals using transform. (ii) Understand the relationship between transform and discrete-time Fourier transform
 Represent discrete-time signals using transform. (ii) Understand the relationship between transform and discrete-time Fourier transform") z Transform Chapter Intended Learning Outcomes: (i) Represent discrete-time signals using transform (ii) Understand the relationship between transform and discrete-time Fourier transform (iii) Understand
z Transform Chapter Intended Learning Outcomes: (i) Represent discrete-time signals using transform (ii) Understand the relationship between transform and discrete-time Fourier transform (iii) Understand
UNIT-II Z-TRANSFORM. This expression is also called a one sided z-transform. This non causal sequence produces positive powers of z in X (z).
.") Page no: 1 UNIT-II Z-TRANSFORM The Z-Transform The direct -transform, properties of the -transform, rational -transforms, inversion of the transform, analysis of linear time-invariant systems in the -
Page no: 1 UNIT-II Z-TRANSFORM The Z-Transform The direct -transform, properties of the -transform, rational -transforms, inversion of the transform, analysis of linear time-invariant systems in the -
! z-transform. " Tie up loose ends. " Regions of convergence properties. ! Inverse z-transform. " Inspection. " Partial fraction
 Lecture Outline ESE 53: Digital Signal Processing Lec 6: January 3, 207 Inverse z-transform! z-transform " Tie up loose ends " gions of convergence properties! Inverse z-transform " Inspection " Partial
Lecture Outline ESE 53: Digital Signal Processing Lec 6: January 3, 207 Inverse z-transform! z-transform " Tie up loose ends " gions of convergence properties! Inverse z-transform " Inspection " Partial
EE123 Digital Signal Processing
 EE123 Digital Signal Processing Discrete Time Fourier Transform M. Lustig, EECS UC Berkeley A couple of things Read Ch 2 2.0-2.9 It s OK to use 2nd edition Class webcast in bcourses.berkeley.edu or linked
EE123 Digital Signal Processing Discrete Time Fourier Transform M. Lustig, EECS UC Berkeley A couple of things Read Ch 2 2.0-2.9 It s OK to use 2nd edition Class webcast in bcourses.berkeley.edu or linked
EE123 Digital Signal Processing
 EE123 Digital Signal Processing Lecture 2B D. T. Fourier Transform M. Lustig, EECS UC Berkeley Something Fun gotenna http://www.gotenna.com/# Text messaging radio Bluetooth phone interface MURS VHF radio
EE123 Digital Signal Processing Lecture 2B D. T. Fourier Transform M. Lustig, EECS UC Berkeley Something Fun gotenna http://www.gotenna.com/# Text messaging radio Bluetooth phone interface MURS VHF radio
Responses of Digital Filters Chapter Intended Learning Outcomes:
 Responses of Digital Filters Chapter Intended Learning Outcomes: (i) Understanding the relationships between impulse response, frequency response, difference equation and transfer function in characterizing
Responses of Digital Filters Chapter Intended Learning Outcomes: (i) Understanding the relationships between impulse response, frequency response, difference equation and transfer function in characterizing
ECE503: Digital Signal Processing Lecture 4
 ECE503: Digital Signal Processing Lecture 4 D. Richard Brown III WPI 06-February-2012 WPI D. Richard Brown III 06-February-2012 1 / 29 Lecture 4 Topics 1. Motivation for the z-transform. 2. Definition
ECE503: Digital Signal Processing Lecture 4 D. Richard Brown III WPI 06-February-2012 WPI D. Richard Brown III 06-February-2012 1 / 29 Lecture 4 Topics 1. Motivation for the z-transform. 2. Definition
The Z transform (2) Alexandra Branzan Albu ELEC 310-Spring 2009-Lecture 28 1
 Alexandra Branzan Albu ELEC 310-Spring 2009-Lecture 28 1") The Z transform (2) Alexandra Branzan Albu ELEC 310-Spring 2009-Lecture 28 1 Outline Properties of the region of convergence (10.2) The inverse Z-transform (10.3) Definition Computational techniques Alexandra
The Z transform (2) Alexandra Branzan Albu ELEC 310-Spring 2009-Lecture 28 1 Outline Properties of the region of convergence (10.2) The inverse Z-transform (10.3) Definition Computational techniques Alexandra
Chapter 7: The z-transform
 Chapter 7: The -Transform ECE352 1 The -Transform - definition Continuous-time systems: e st H(s) y(t) = e st H(s) e st is an eigenfunction of the LTI system h(t), and H(s) is the corresponding eigenvalue.
Chapter 7: The -Transform ECE352 1 The -Transform - definition Continuous-time systems: e st H(s) y(t) = e st H(s) e st is an eigenfunction of the LTI system h(t), and H(s) is the corresponding eigenvalue.
Discrete-Time Signals and Systems. The z-transform and Its Application. The Direct z-transform. Region of Convergence. Reference: Sections
 Discrete-Time Signals and Systems The z-transform and Its Application Dr. Deepa Kundur University of Toronto Reference: Sections 3. - 3.4 of John G. Proakis and Dimitris G. Manolakis, Digital Signal Processing:
Discrete-Time Signals and Systems The z-transform and Its Application Dr. Deepa Kundur University of Toronto Reference: Sections 3. - 3.4 of John G. Proakis and Dimitris G. Manolakis, Digital Signal Processing:
信號與系統 Signals and Systems
 Spring 2013 Flowchart Introduction (Chap 1) LTI & Convolution (Chap 2) NTUEE-SS10-Z-2 信號與系統 Signals and Systems Chapter SS-10 The z-transform FS (Chap 3) Periodic Bounded/Convergent CT DT FT Aperiodic
Spring 2013 Flowchart Introduction (Chap 1) LTI & Convolution (Chap 2) NTUEE-SS10-Z-2 信號與系統 Signals and Systems Chapter SS-10 The z-transform FS (Chap 3) Periodic Bounded/Convergent CT DT FT Aperiodic
Digital Signal Processing:
 Digital Signal Processing: Mathematical and algorithmic manipulation of discretized and quantized or naturally digital signals in order to extract the most relevant and pertinent information that is carried
Digital Signal Processing: Mathematical and algorithmic manipulation of discretized and quantized or naturally digital signals in order to extract the most relevant and pertinent information that is carried
Very useful for designing and analyzing signal processing systems
 z-transform z-transform The z-transform generalizes the Discrete-Time Fourier Transform (DTFT) for analyzing infinite-length signals and systems Very useful for designing and analyzing signal processing
z-transform z-transform The z-transform generalizes the Discrete-Time Fourier Transform (DTFT) for analyzing infinite-length signals and systems Very useful for designing and analyzing signal processing
E : Lecture 1 Introduction
 E85.2607: Lecture 1 Introduction 1 Administrivia 2 DSP review 3 Fun with Matlab E85.2607: Lecture 1 Introduction 2010-01-21 1 / 24 Course overview Advanced Digital Signal Theory Design, analysis, and implementation
E85.2607: Lecture 1 Introduction 1 Administrivia 2 DSP review 3 Fun with Matlab E85.2607: Lecture 1 Introduction 2010-01-21 1 / 24 Course overview Advanced Digital Signal Theory Design, analysis, and implementation
EE123 Digital Signal Processing
 EE123 Digital Signal Processing Lecture 2A D.T Systems D. T. Fourier Transform A couple of things Read Ch 2 2.0-2.9 It s OK to use 2nd edition My office hours: posted on-line W 4-5pm Cory 506 ham radio
EE123 Digital Signal Processing Lecture 2A D.T Systems D. T. Fourier Transform A couple of things Read Ch 2 2.0-2.9 It s OK to use 2nd edition My office hours: posted on-line W 4-5pm Cory 506 ham radio
z-transform Chapter 6
 z-transform Chapter 6 Dr. Iyad djafar Outline 2 Definition Relation Between z-transform and DTFT Region of Convergence Common z-transform Pairs The Rational z-transform The Inverse z-transform z-transform
z-transform Chapter 6 Dr. Iyad djafar Outline 2 Definition Relation Between z-transform and DTFT Region of Convergence Common z-transform Pairs The Rational z-transform The Inverse z-transform z-transform
Lecture 2 OKAN UNIVERSITY FACULTY OF ENGINEERING AND ARCHITECTURE
 OKAN UNIVERSITY FACULTY OF ENGINEERING AND ARCHITECTURE EEE 43 DIGITAL SIGNAL PROCESSING (DSP) 2 DIFFERENCE EQUATIONS AND THE Z- TRANSFORM FALL 22 Yrd. Doç. Dr. Didem Kivanc Tureli didemk@ieee.org didem.kivanc@okan.edu.tr
OKAN UNIVERSITY FACULTY OF ENGINEERING AND ARCHITECTURE EEE 43 DIGITAL SIGNAL PROCESSING (DSP) 2 DIFFERENCE EQUATIONS AND THE Z- TRANSFORM FALL 22 Yrd. Doç. Dr. Didem Kivanc Tureli didemk@ieee.org didem.kivanc@okan.edu.tr
How to manipulate Frequencies in Discrete-time Domain? Two Main Approaches
 How to manipulate Frequencies in Discrete-time Domain? Two Main Approaches Difference Equations (an LTI system) x[n]: input, y[n]: output That is, building a system that maes use of the current and previous
How to manipulate Frequencies in Discrete-time Domain? Two Main Approaches Difference Equations (an LTI system) x[n]: input, y[n]: output That is, building a system that maes use of the current and previous
EE123 Digital Signal Processing
 EE123 Digital Signal Processing Lecture 5 based on slides by J.M. Kahn Info Last time Finished DTFT Ch. 2 z-transforms Ch. 3 Today: DFT Ch. 8 Reminders: HW Due tonight The effects of sampling What is going
EE123 Digital Signal Processing Lecture 5 based on slides by J.M. Kahn Info Last time Finished DTFT Ch. 2 z-transforms Ch. 3 Today: DFT Ch. 8 Reminders: HW Due tonight The effects of sampling What is going
Chapter 13 Z Transform
 Chapter 13 Z Transform 1. -transform 2. Inverse -transform 3. Properties of -transform 4. Solution to Difference Equation 5. Calculating output using -transform 6. DTFT and -transform 7. Stability Analysis
Chapter 13 Z Transform 1. -transform 2. Inverse -transform 3. Properties of -transform 4. Solution to Difference Equation 5. Calculating output using -transform 6. DTFT and -transform 7. Stability Analysis
EEL3135: Homework #4
 EEL335: Homework #4 Problem : For each of the systems below, determine whether or not the system is () linear, () time-invariant, and (3) causal: (a) (b) (c) xn [ ] cos( 04πn) (d) xn [ ] xn [ ] xn [ 5]
EEL335: Homework #4 Problem : For each of the systems below, determine whether or not the system is () linear, () time-invariant, and (3) causal: (a) (b) (c) xn [ ] cos( 04πn) (d) xn [ ] xn [ ] xn [ 5]
EE482: Digital Signal Processing Applications
 Professor Brendan Morris, SEB 3216, brendan.morris@unlv.edu EE482: Digital Signal Processing Applications Spring 2014 TTh 14:30-15:45 CBC C222 Lecture 02 DSP Fundamentals 14/01/21 http://www.ee.unlv.edu/~b1morris/ee482/
Professor Brendan Morris, SEB 3216, brendan.morris@unlv.edu EE482: Digital Signal Processing Applications Spring 2014 TTh 14:30-15:45 CBC C222 Lecture 02 DSP Fundamentals 14/01/21 http://www.ee.unlv.edu/~b1morris/ee482/
DSP-I DSP-I DSP-I DSP-I
 DSP-I DSP-I DSP-I DSP-I Digital Signal Processing I (8-79) Fall Semester, 005 OTES FOR 8-79 LECTURE 9: PROPERTIES AD EXAPLES OF Z-TRASFORS Distributed: September 7, 005 otes: This handout contains in outline
DSP-I DSP-I DSP-I DSP-I Digital Signal Processing I (8-79) Fall Semester, 005 OTES FOR 8-79 LECTURE 9: PROPERTIES AD EXAPLES OF Z-TRASFORS Distributed: September 7, 005 otes: This handout contains in outline
Module 4 : Laplace and Z Transform Problem Set 4
 Module 4 : Laplace and Z Transform Problem Set 4 Problem 1 The input x(t) and output y(t) of a causal LTI system are related to the block diagram representation shown in the figure. (a) Determine a differential
Module 4 : Laplace and Z Transform Problem Set 4 Problem 1 The input x(t) and output y(t) of a causal LTI system are related to the block diagram representation shown in the figure. (a) Determine a differential
Z Transform (Part - II)
") Z Transform (Part - II). The Z Transform of the following real exponential sequence x(nt) = a n, nt 0 = 0, nt < 0, a > 0 (a) ; z > (c) for all z z (b) ; z (d) ; z < a > a az az Soln. The given sequence
Z Transform (Part - II). The Z Transform of the following real exponential sequence x(nt) = a n, nt 0 = 0, nt < 0, a > 0 (a) ; z > (c) for all z z (b) ; z (d) ; z < a > a az az Soln. The given sequence
Stability Condition in Terms of the Pole Locations
 Stability Condition in Terms of the Pole Locations A causal LTI digital filter is BIBO stable if and only if its impulse response h[n] is absolutely summable, i.e., 1 = S h [ n] < n= We now develop a stability
Stability Condition in Terms of the Pole Locations A causal LTI digital filter is BIBO stable if and only if its impulse response h[n] is absolutely summable, i.e., 1 = S h [ n] < n= We now develop a stability
Digital Signal Processing Lecture 9 - Design of Digital Filters - FIR
 Digital Signal Processing - Design of Digital Filters - FIR Electrical Engineering and Computer Science University of Tennessee, Knoxville November 3, 2015 Overview 1 2 3 4 Roadmap Introduction Discrete-time
Digital Signal Processing - Design of Digital Filters - FIR Electrical Engineering and Computer Science University of Tennessee, Knoxville November 3, 2015 Overview 1 2 3 4 Roadmap Introduction Discrete-time
Digital Signal Processing
 COMP ENG 4TL4: Digital Signal Processing Notes for Lecture #21 Friday, October 24, 2003 Types of causal FIR (generalized) linear-phase filters: Type I: Symmetric impulse response: with order M an even
COMP ENG 4TL4: Digital Signal Processing Notes for Lecture #21 Friday, October 24, 2003 Types of causal FIR (generalized) linear-phase filters: Type I: Symmetric impulse response: with order M an even
Like bilateral Laplace transforms, ROC must be used to determine a unique inverse z-transform.
 Inversion of the z-transform Focus on rational z-transform of z 1. Apply partial fraction expansion. Like bilateral Laplace transforms, ROC must be used to determine a unique inverse z-transform. Let X(z)
Inversion of the z-transform Focus on rational z-transform of z 1. Apply partial fraction expansion. Like bilateral Laplace transforms, ROC must be used to determine a unique inverse z-transform. Let X(z)
Lecture 19 IIR Filters
 Lecture 19 IIR Filters Fundamentals of Digital Signal Processing Spring, 2012 Wei-Ta Chu 2012/5/10 1 General IIR Difference Equation IIR system: infinite-impulse response system The most general class
Lecture 19 IIR Filters Fundamentals of Digital Signal Processing Spring, 2012 Wei-Ta Chu 2012/5/10 1 General IIR Difference Equation IIR system: infinite-impulse response system The most general class
Digital Signal Processing. Midterm 1 Solution
 EE 123 University of California, Berkeley Anant Sahai February 15, 27 Digital Signal Processing Instructions Midterm 1 Solution Total time allowed for the exam is 8 minutes Some useful formulas: Discrete
EE 123 University of California, Berkeley Anant Sahai February 15, 27 Digital Signal Processing Instructions Midterm 1 Solution Total time allowed for the exam is 8 minutes Some useful formulas: Discrete
Digital Signal Processing. Lecture Notes and Exam Questions DRAFT
 Digital Signal Processing Lecture Notes and Exam Questions Convolution Sum January 31, 2006 Convolution Sum of Two Finite Sequences Consider convolution of h(n) and g(n) (M>N); y(n) = h(n), n =0... M 1
Digital Signal Processing Lecture Notes and Exam Questions Convolution Sum January 31, 2006 Convolution Sum of Two Finite Sequences Consider convolution of h(n) and g(n) (M>N); y(n) = h(n), n =0... M 1
Discrete-time signals and systems
 Discrete-time signals and systems 1 DISCRETE-TIME DYNAMICAL SYSTEMS x(t) G y(t) Linear system: Output y(n) is a linear function of the inputs sequence: y(n) = k= h(k)x(n k) h(k): impulse response of the
Discrete-time signals and systems 1 DISCRETE-TIME DYNAMICAL SYSTEMS x(t) G y(t) Linear system: Output y(n) is a linear function of the inputs sequence: y(n) = k= h(k)x(n k) h(k): impulse response of the
Solutions: Homework Set # 5
 Signal Processing for Communications EPFL Winter Semester 2007/2008 Prof. Suhas Diggavi Handout # 22, Tuesday, November, 2007 Solutions: Homework Set # 5 Problem (a) Since h [n] = 0, we have (b) We can
Signal Processing for Communications EPFL Winter Semester 2007/2008 Prof. Suhas Diggavi Handout # 22, Tuesday, November, 2007 Solutions: Homework Set # 5 Problem (a) Since h [n] = 0, we have (b) We can
Z-Transform. The Z-transform is the Discrete-Time counterpart of the Laplace Transform. Laplace : G(s) = g(t)e st dt. Z : G(z) =
 = g(t)e st dt. Z : G(z) =") Z-Transform The Z-transform is the Discrete-Time counterpart of the Laplace Transform. Laplace : G(s) = Z : G(z) = It is Used in Digital Signal Processing n= g(t)e st dt g[n]z n Used to Define Frequency
Z-Transform The Z-transform is the Discrete-Time counterpart of the Laplace Transform. Laplace : G(s) = Z : G(z) = It is Used in Digital Signal Processing n= g(t)e st dt g[n]z n Used to Define Frequency
! Introduction. ! Discrete Time Signals & Systems. ! Z-Transform. ! Inverse Z-Transform. ! Sampling of Continuous Time Signals
 ESE 531: Digital Signal Processing Lec 25: April 24, 2018 Review Course Content! Introduction! Discrete Time Signals & Systems! Discrete Time Fourier Transform! Z-Transform! Inverse Z-Transform! Sampling
ESE 531: Digital Signal Processing Lec 25: April 24, 2018 Review Course Content! Introduction! Discrete Time Signals & Systems! Discrete Time Fourier Transform! Z-Transform! Inverse Z-Transform! Sampling
Z - Transform. It offers the techniques for digital filter design and frequency analysis of digital signals.
 Z - Transform The z-transform is a very important tool in describing and analyzing digital systems. It offers the techniques for digital filter design and frequency analysis of digital signals. Definition
Z - Transform The z-transform is a very important tool in describing and analyzing digital systems. It offers the techniques for digital filter design and frequency analysis of digital signals. Definition
EECE 301 Signals & Systems Prof. Mark Fowler
 EECE 3 Signals & Systems Prof. Mark Fowler Note Set #9 C-T Systems: Laplace Transform Transfer Function Reading Assignment: Section 6.5 of Kamen and Heck /7 Course Flow Diagram The arrows here show conceptual
EECE 3 Signals & Systems Prof. Mark Fowler Note Set #9 C-T Systems: Laplace Transform Transfer Function Reading Assignment: Section 6.5 of Kamen and Heck /7 Course Flow Diagram The arrows here show conceptual
/ (2π) X(e jω ) dω. 4. An 8 point sequence is given by x(n) = {2,2,2,2,1,1,1,1}. Compute 8 point DFT of x(n) by
 X(e jω ) dω. 4. An 8 point sequence is given by x(n) = {2,2,2,2,1,1,1,1}. Compute 8 point DFT of x(n) by") Code No: RR320402 Set No. 1 III B.Tech II Semester Regular Examinations, Apr/May 2006 DIGITAL SIGNAL PROCESSING ( Common to Electronics & Communication Engineering, Electronics & Instrumentation Engineering,
Code No: RR320402 Set No. 1 III B.Tech II Semester Regular Examinations, Apr/May 2006 DIGITAL SIGNAL PROCESSING ( Common to Electronics & Communication Engineering, Electronics & Instrumentation Engineering,
Digital Signal Processing
 Digital Signal Processing The -Transform and Its Application to the Analysis of LTI Systems Moslem Amiri, Václav Přenosil Embedded Systems Laboratory Faculty of Informatics, Masaryk University Brno, Cech
Digital Signal Processing The -Transform and Its Application to the Analysis of LTI Systems Moslem Amiri, Václav Přenosil Embedded Systems Laboratory Faculty of Informatics, Masaryk University Brno, Cech
Review of Discrete-Time System
 Review of Discrete-Time System Electrical & Computer Engineering University of Maryland, College Park Acknowledgment: ENEE630 slides were based on class notes developed by Profs. K.J. Ray Liu and Min Wu.
Review of Discrete-Time System Electrical & Computer Engineering University of Maryland, College Park Acknowledgment: ENEE630 slides were based on class notes developed by Profs. K.J. Ray Liu and Min Wu.
Z-Transform. 清大電機系林嘉文 Original PowerPoint slides prepared by S. K. Mitra 4-1-1
 Chapter 6 Z-Transform 清大電機系林嘉文 cwlin@ee.nthu.edu.tw 03-5731152 Original PowerPoint slides prepared by S. K. Mitra 4-1-1 z-transform The DTFT provides a frequency-domain representation of discrete-time
Chapter 6 Z-Transform 清大電機系林嘉文 cwlin@ee.nthu.edu.tw 03-5731152 Original PowerPoint slides prepared by S. K. Mitra 4-1-1 z-transform The DTFT provides a frequency-domain representation of discrete-time
X (z) = n= 1. Ã! X (z) x [n] X (z) = Z fx [n]g x [n] = Z 1 fx (z)g. r n x [n] ª e jnω
![X (z) = n= 1. Ã! X (z) x [n] X (z) = Z fx [n]g x [n] = Z 1 fx (z)g. r n x [n] ª e jnω](/thumbs/82/85448077.jpg "X (z) = n= 1. Ã! X (z) x [n] X (z) = Z fx [n]g x [n] = Z 1 fx (z)g. r n x [n] ª e jnω") 3 The z-transform ² Two advantages with the z-transform:. The z-transform is a generalization of the Fourier transform for discrete-time signals; which encompasses a broader class of sequences. The z-transform
3 The z-transform ² Two advantages with the z-transform:. The z-transform is a generalization of the Fourier transform for discrete-time signals; which encompasses a broader class of sequences. The z-transform
Discrete-Time Signals and Systems. Frequency Domain Analysis of LTI Systems. The Frequency Response Function. The Frequency Response Function
 Discrete-Time Signals and s Frequency Domain Analysis of LTI s Dr. Deepa Kundur University of Toronto Reference: Sections 5., 5.2-5.5 of John G. Proakis and Dimitris G. Manolakis, Digital Signal Processing:
Discrete-Time Signals and s Frequency Domain Analysis of LTI s Dr. Deepa Kundur University of Toronto Reference: Sections 5., 5.2-5.5 of John G. Proakis and Dimitris G. Manolakis, Digital Signal Processing:
Discrete Time Systems
 1 Discrete Time Systems {x[0], x[1], x[2], } H {y[0], y[1], y[2], } Example: y[n] = 2x[n] + 3x[n-1] + 4x[n-2] 2 FIR and IIR Systems FIR: Finite Impulse Response -- non-recursive y[n] = 2x[n] + 3x[n-1]
1 Discrete Time Systems {x[0], x[1], x[2], } H {y[0], y[1], y[2], } Example: y[n] = 2x[n] + 3x[n-1] + 4x[n-2] 2 FIR and IIR Systems FIR: Finite Impulse Response -- non-recursive y[n] = 2x[n] + 3x[n-1]
ELEG 305: Digital Signal Processing
 ELEG 305: Digital Signal Processing Lecture 4: Inverse z Transforms & z Domain Analysis Kenneth E. Barner Department of Electrical and Computer Engineering University of Delaware Fall 008 K. E. Barner
ELEG 305: Digital Signal Processing Lecture 4: Inverse z Transforms & z Domain Analysis Kenneth E. Barner Department of Electrical and Computer Engineering University of Delaware Fall 008 K. E. Barner
Need for transformation?
 Z-TRANSFORM In today s class Z-transform Unilateral Z-transform Bilateral Z-transform Region of Convergence Inverse Z-transform Power Series method Partial Fraction method Solution of difference equations
Z-TRANSFORM In today s class Z-transform Unilateral Z-transform Bilateral Z-transform Region of Convergence Inverse Z-transform Power Series method Partial Fraction method Solution of difference equations
Fall 2011, EE123 Digital Signal Processing
 Lecture 6 Miki Lustig, UCB September 11, 2012 Miki Lustig, UCB DFT and Sampling the DTFT X (e jω ) = e j4ω sin2 (5ω/2) sin 2 (ω/2) 5 x[n] 25 X(e jω ) 4 20 3 15 2 1 0 10 5 1 0 5 10 15 n 0 0 2 4 6 ω 5 reconstructed
Lecture 6 Miki Lustig, UCB September 11, 2012 Miki Lustig, UCB DFT and Sampling the DTFT X (e jω ) = e j4ω sin2 (5ω/2) sin 2 (ω/2) 5 x[n] 25 X(e jω ) 4 20 3 15 2 1 0 10 5 1 0 5 10 15 n 0 0 2 4 6 ω 5 reconstructed
Signals and Systems Lecture 8: Z Transform
 Signals and Systems Lecture 8: Z Transform Farzaneh Abdollahi Department of Electrical Engineering Amirkabir University of Technology Winter 2012 Farzaneh Abdollahi Signal and Systems Lecture 8 1/29 Introduction
Signals and Systems Lecture 8: Z Transform Farzaneh Abdollahi Department of Electrical Engineering Amirkabir University of Technology Winter 2012 Farzaneh Abdollahi Signal and Systems Lecture 8 1/29 Introduction
Generalizing the DTFT!
 The Transform Generaliing the DTFT! The forward DTFT is defined by X e jω ( ) = x n e jωn in which n= Ω is discrete-time radian frequency, a real variable. The quantity e jωn is then a complex sinusoid
The Transform Generaliing the DTFT! The forward DTFT is defined by X e jω ( ) = x n e jωn in which n= Ω is discrete-time radian frequency, a real variable. The quantity e jωn is then a complex sinusoid
EE 3054: Signals, Systems, and Transforms Spring A causal discrete-time LTI system is described by the equation. y(n) = 1 4.
 = 1 4.") EE : Signals, Systems, and Transforms Spring 7. A causal discrete-time LTI system is described by the equation Test y(n) = X x(n k) k= No notes, closed book. Show your work. Simplify your answers.. A discrete-time
EE : Signals, Systems, and Transforms Spring 7. A causal discrete-time LTI system is described by the equation Test y(n) = X x(n k) k= No notes, closed book. Show your work. Simplify your answers.. A discrete-time
EECE 301 Signals & Systems Prof. Mark Fowler
 EECE 30 Signals & Systems Prof. Mark Fowler Note Set #26 D-T Systems: Transfer Function and Frequency Response / Finding the Transfer Function from Difference Eq. Recall: we found a DT system s freq. resp.
EECE 30 Signals & Systems Prof. Mark Fowler Note Set #26 D-T Systems: Transfer Function and Frequency Response / Finding the Transfer Function from Difference Eq. Recall: we found a DT system s freq. resp.
EE 225D LECTURE ON DIGITAL FILTERS. University of California Berkeley
 University of California Berkeley College of Engineering Department of Electrical Engineering and Computer Sciences Professors : N.Morgan / B.Gold EE225D Digital Filters Spring,1999 Lecture 7 N.MORGAN
University of California Berkeley College of Engineering Department of Electrical Engineering and Computer Sciences Professors : N.Morgan / B.Gold EE225D Digital Filters Spring,1999 Lecture 7 N.MORGAN
LTI H. the system H when xn [ ] is the input.
![LTI H. the system H when xn [ ] is the input.](/thumbs/81/84326358.jpg "LTI H. the system H when xn [ ] is the input.") REVIEW OF 1D LTI SYSTEMS LTI xn [ ] y[ n] H Operator notation: y[ n] = H{ x[ n] } In English, this is read: yn [ ] is the output of the system H when xn [ ] is the input. 2 THE MOST IMPORTANT PROPERTIES
REVIEW OF 1D LTI SYSTEMS LTI xn [ ] y[ n] H Operator notation: y[ n] = H{ x[ n] } In English, this is read: yn [ ] is the output of the system H when xn [ ] is the input. 2 THE MOST IMPORTANT PROPERTIES
Lecture 7 Discrete Systems
 Lecture 7 Discrete Systems EE 52: Instrumentation and Measurements Lecture Notes Update on November, 29 Aly El-Osery, Electrical Engineering Dept., New Mexico Tech 7. Contents The z-transform 2 Linear
Lecture 7 Discrete Systems EE 52: Instrumentation and Measurements Lecture Notes Update on November, 29 Aly El-Osery, Electrical Engineering Dept., New Mexico Tech 7. Contents The z-transform 2 Linear
EE 521: Instrumentation and Measurements
 Aly El-Osery Electrical Engineering Department, New Mexico Tech Socorro, New Mexico, USA November 1, 2009 1 / 27 1 The z-transform 2 Linear Time-Invariant System 3 Filter Design IIR Filters FIR Filters
Aly El-Osery Electrical Engineering Department, New Mexico Tech Socorro, New Mexico, USA November 1, 2009 1 / 27 1 The z-transform 2 Linear Time-Invariant System 3 Filter Design IIR Filters FIR Filters
ESE 531: Digital Signal Processing
 ESE 531: Digital Signal Processing Lec 22: April 10, 2018 Adaptive Filters Penn ESE 531 Spring 2018 Khanna Lecture Outline! Circular convolution as linear convolution with aliasing! Adaptive Filters Penn
ESE 531: Digital Signal Processing Lec 22: April 10, 2018 Adaptive Filters Penn ESE 531 Spring 2018 Khanna Lecture Outline! Circular convolution as linear convolution with aliasing! Adaptive Filters Penn
DIGITAL SIGNAL PROCESSING. Chapter 3 z-transform
 DIGITAL SIGNAL PROCESSING Chapter 3 z-transform by Dr. Norizam Sulaiman Faculty of Electrical & Electronics Engineering norizam@ump.edu.my OER Digital Signal Processing by Dr. Norizam Sulaiman work is
DIGITAL SIGNAL PROCESSING Chapter 3 z-transform by Dr. Norizam Sulaiman Faculty of Electrical & Electronics Engineering norizam@ump.edu.my OER Digital Signal Processing by Dr. Norizam Sulaiman work is
ELEG 305: Digital Signal Processing
 ELEG 305: Digital Signal Processing Lecture : Design of Digital IIR Filters (Part I) Kenneth E. Barner Department of Electrical and Computer Engineering University of Delaware Fall 008 K. E. Barner (Univ.
ELEG 305: Digital Signal Processing Lecture : Design of Digital IIR Filters (Part I) Kenneth E. Barner Department of Electrical and Computer Engineering University of Delaware Fall 008 K. E. Barner (Univ.
Digital Signal Processing Lecture 10 - Discrete Fourier Transform
 Digital Signal Processing - Discrete Fourier Transform Electrical Engineering and Computer Science University of Tennessee, Knoxville November 12, 2015 Overview 1 2 3 4 Review - 1 Introduction Discrete-time
Digital Signal Processing - Discrete Fourier Transform Electrical Engineering and Computer Science University of Tennessee, Knoxville November 12, 2015 Overview 1 2 3 4 Review - 1 Introduction Discrete-time
EE538 Digital Signal Processing I Session 13 Exam 1 Live: Wed., Sept. 18, Cover Sheet
 EE538 Digital Signal Processing I Session 3 Exam Live: Wed., Sept. 8, 00 Cover Sheet Test Duration: 50 minutes. Coverage: Sessions -0. Open Book but Closed Notes. Calculators not allowed. This test contains
EE538 Digital Signal Processing I Session 3 Exam Live: Wed., Sept. 8, 00 Cover Sheet Test Duration: 50 minutes. Coverage: Sessions -0. Open Book but Closed Notes. Calculators not allowed. This test contains
2.161 Signal Processing: Continuous and Discrete Fall 2008
 MIT OpenCourseWare http://ocw.mit.edu 2.161 Signal Processing: Continuous and Discrete Fall 2008 For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms. Massachusetts
MIT OpenCourseWare http://ocw.mit.edu 2.161 Signal Processing: Continuous and Discrete Fall 2008 For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms. Massachusetts
Computer Engineering 4TL4: Digital Signal Processing
 Computer Engineering 4TL4: Digital Signal Processing Day Class Instructor: Dr. I. C. BRUCE Duration of Examination: 3 Hours McMaster University Final Examination December, 2003 This examination paper includes
Computer Engineering 4TL4: Digital Signal Processing Day Class Instructor: Dr. I. C. BRUCE Duration of Examination: 3 Hours McMaster University Final Examination December, 2003 This examination paper includes
EE123 Digital Signal Processing
 EE123 Digital Signal Processing Lecture 1 Time-Dependent FT Announcements! Midterm: 2/22/216 Open everything... but cheat sheet recommended instead 1am-12pm How s the lab going? Frequency Analysis with
EE123 Digital Signal Processing Lecture 1 Time-Dependent FT Announcements! Midterm: 2/22/216 Open everything... but cheat sheet recommended instead 1am-12pm How s the lab going? Frequency Analysis with
Advanced Training Course on FPGA Design and VHDL for Hardware Simulation and Synthesis
 065-3 Advanced Training Course on FPGA Design and VHDL for Hardware Simulation and Synthesis 6 October - 0 November, 009 Digital Signal Processing The z-transform Massimiliano Nolich DEEI Facolta' di Ingegneria
065-3 Advanced Training Course on FPGA Design and VHDL for Hardware Simulation and Synthesis 6 October - 0 November, 009 Digital Signal Processing The z-transform Massimiliano Nolich DEEI Facolta' di Ingegneria
Introduction to the z-transform
 z-transforms and applications Introduction to the z-transform The z-transform is useful for the manipulation of discrete data sequences and has acquired a new significance in the formulation and analysis
z-transforms and applications Introduction to the z-transform The z-transform is useful for the manipulation of discrete data sequences and has acquired a new significance in the formulation and analysis
( ) John A. Quinn Lecture. ESE 531: Digital Signal Processing. Lecture Outline. Frequency Response of LTI System. Example: Zero on Real Axis
 John A. Quinn Lecture. ESE 531: Digital Signal Processing. Lecture Outline. Frequency Response of LTI System. Example: Zero on Real Axis") John A. Quinn Lecture ESE 531: Digital Signal Processing Lec 15: March 21, 2017 Review, Generalized Linear Phase Systems Penn ESE 531 Spring 2017 Khanna Lecture Outline!!! 2 Frequency Response of LTI System
John A. Quinn Lecture ESE 531: Digital Signal Processing Lec 15: March 21, 2017 Review, Generalized Linear Phase Systems Penn ESE 531 Spring 2017 Khanna Lecture Outline!!! 2 Frequency Response of LTI System
Digital Signal Processing Lecture 8 - Filter Design - IIR
 Digital Signal Processing - Filter Design - IIR Electrical Engineering and Computer Science University of Tennessee, Knoxville October 20, 2015 Overview 1 2 3 4 5 6 Roadmap Discrete-time signals and systems
Digital Signal Processing - Filter Design - IIR Electrical Engineering and Computer Science University of Tennessee, Knoxville October 20, 2015 Overview 1 2 3 4 5 6 Roadmap Discrete-time signals and systems
DHANALAKSHMI COLLEGE OF ENGINEERING DEPARTMENT OF ELECTRICAL AND ELECTRONICS ENGINEERING EC2314- DIGITAL SIGNAL PROCESSING UNIT I INTRODUCTION PART A
 DHANALAKSHMI COLLEGE OF ENGINEERING DEPARTMENT OF ELECTRICAL AND ELECTRONICS ENGINEERING EC2314- DIGITAL SIGNAL PROCESSING UNIT I INTRODUCTION PART A Classification of systems : Continuous and Discrete
DHANALAKSHMI COLLEGE OF ENGINEERING DEPARTMENT OF ELECTRICAL AND ELECTRONICS ENGINEERING EC2314- DIGITAL SIGNAL PROCESSING UNIT I INTRODUCTION PART A Classification of systems : Continuous and Discrete
Notes 22 largely plagiarized by %khc
 Notes 22 largely plagiarized by %khc LTv. ZT Using the conformal map z e st, we can transfer our knowledge of the ROC of the bilateral laplace transform to the ROC of the bilateral z transform. Laplace
Notes 22 largely plagiarized by %khc LTv. ZT Using the conformal map z e st, we can transfer our knowledge of the ROC of the bilateral laplace transform to the ROC of the bilateral z transform. Laplace
Ch.11 The Discrete-Time Fourier Transform (DTFT)
") EE2S11 Signals and Systems, part 2 Ch.11 The Discrete-Time Fourier Transform (DTFT Contents definition of the DTFT relation to the -transform, region of convergence, stability frequency plots convolution
EE2S11 Signals and Systems, part 2 Ch.11 The Discrete-Time Fourier Transform (DTFT Contents definition of the DTFT relation to the -transform, region of convergence, stability frequency plots convolution
EE123 Digital Signal Processing
 EE123 Digital Signal Processing Lecture 2 Discrete Time Systems Today Last time: Administration Overview Announcement: HW1 will be out today Lab 0 out webcast out Today: Ch. 2 - Discrete-Time Signals and
EE123 Digital Signal Processing Lecture 2 Discrete Time Systems Today Last time: Administration Overview Announcement: HW1 will be out today Lab 0 out webcast out Today: Ch. 2 - Discrete-Time Signals and
LECTURE NOTES DIGITAL SIGNAL PROCESSING III B.TECH II SEMESTER (JNTUK R 13)
") LECTURE NOTES ON DIGITAL SIGNAL PROCESSING III B.TECH II SEMESTER (JNTUK R 13) FACULTY : B.V.S.RENUKA DEVI (Asst.Prof) / Dr. K. SRINIVASA RAO (Assoc. Prof) DEPARTMENT OF ELECTRONICS AND COMMUNICATIONS
LECTURE NOTES ON DIGITAL SIGNAL PROCESSING III B.TECH II SEMESTER (JNTUK R 13) FACULTY : B.V.S.RENUKA DEVI (Asst.Prof) / Dr. K. SRINIVASA RAO (Assoc. Prof) DEPARTMENT OF ELECTRONICS AND COMMUNICATIONS
y[n] = = h[k]x[n k] h[k]z n k k= 0 h[k]z k ) = H(z)z n h[k]z h (7.1)
![y[n] = = h[k]x[n k] h[k]z n k k= 0 h[k]z k ) = H(z)z n h[k]z h (7.1)](/thumbs/71/66089461.jpg "y[n] = = h[k]x[n k] h[k]z n k k= 0 h[k]z k ) = H(z)z n h[k]z h (7.1)") 7. The Z-transform 7. Definition of the Z-transform We saw earlier that complex exponential of the from {e jwn } is an eigen function of for a LTI System. We can generalize this for signals of the form
7. The Z-transform 7. Definition of the Z-transform We saw earlier that complex exponential of the from {e jwn } is an eigen function of for a LTI System. We can generalize this for signals of the form
A system that is both linear and time-invariant is called linear time-invariant (LTI).
.") The Cooper Union Department of Electrical Engineering ECE111 Signal Processing & Systems Analysis Lecture Notes: Time, Frequency & Transform Domains February 28, 2012 Signals & Systems Signals are mapped
The Cooper Union Department of Electrical Engineering ECE111 Signal Processing & Systems Analysis Lecture Notes: Time, Frequency & Transform Domains February 28, 2012 Signals & Systems Signals are mapped
ENT 315 Medical Signal Processing CHAPTER 2 DISCRETE FOURIER TRANSFORM. Dr. Lim Chee Chin
 ENT 315 Medical Signal Processing CHAPTER 2 DISCRETE FOURIER TRANSFORM Dr. Lim Chee Chin Outline Introduction Discrete Fourier Series Properties of Discrete Fourier Series Time domain aliasing due to frequency
ENT 315 Medical Signal Processing CHAPTER 2 DISCRETE FOURIER TRANSFORM Dr. Lim Chee Chin Outline Introduction Discrete Fourier Series Properties of Discrete Fourier Series Time domain aliasing due to frequency
EE-210. Signals and Systems Homework 7 Solutions
 EE-20. Signals and Systems Homework 7 Solutions Spring 200 Exercise Due Date th May. Problems Q Let H be the causal system described by the difference equation w[n] = 7 w[n ] 2 2 w[n 2] + x[n ] x[n 2]
EE-20. Signals and Systems Homework 7 Solutions Spring 200 Exercise Due Date th May. Problems Q Let H be the causal system described by the difference equation w[n] = 7 w[n ] 2 2 w[n 2] + x[n ] x[n 2]
VI. Z Transform and DT System Analysis
 Summer 2008 Signals & Systems S.F. Hsieh VI. Z Transform and DT System Analysis Introduction Why Z transform? a DT counterpart of the Laplace transform in CT. Generalization of DT Fourier transform: z
Summer 2008 Signals & Systems S.F. Hsieh VI. Z Transform and DT System Analysis Introduction Why Z transform? a DT counterpart of the Laplace transform in CT. Generalization of DT Fourier transform: z
UNIVERSITI MALAYSIA PERLIS
 UNIVERSITI MALAYSIA PERLIS SCHOOL OF COMPUTER & COMMUNICATIONS ENGINEERING EKT 230 SIGNALS AND SYSTEMS LABORATORY MODULE LAB 5 : LAPLACE TRANSFORM & Z-TRANSFORM 1 LABORATORY OUTCOME Ability to describe
UNIVERSITI MALAYSIA PERLIS SCHOOL OF COMPUTER & COMMUNICATIONS ENGINEERING EKT 230 SIGNALS AND SYSTEMS LABORATORY MODULE LAB 5 : LAPLACE TRANSFORM & Z-TRANSFORM 1 LABORATORY OUTCOME Ability to describe
Digital Signal Processing
 COMP ENG 4TL4: Digital Signal Processing Notes for Lecture #24 Tuesday, November 4, 2003 6.8 IIR Filter Design Properties of IIR Filters: IIR filters may be unstable Causal IIR filters with rational system
COMP ENG 4TL4: Digital Signal Processing Notes for Lecture #24 Tuesday, November 4, 2003 6.8 IIR Filter Design Properties of IIR Filters: IIR filters may be unstable Causal IIR filters with rational system
Each problem is worth 25 points, and you may solve the problems in any order.
 EE 120: Signals & Systems Department of Electrical Engineering and Computer Sciences University of California, Berkeley Midterm Exam #2 April 11, 2016, 2:10-4:00pm Instructions: There are four questions
EE 120: Signals & Systems Department of Electrical Engineering and Computer Sciences University of California, Berkeley Midterm Exam #2 April 11, 2016, 2:10-4:00pm Instructions: There are four questions
Chirp Transform for FFT
 Chirp Transform for FFT Since the FFT is an implementation of the DFT, it provides a frequency resolution of 2π/N, where N is the length of the input sequence. If this resolution is not sufficient in a
Chirp Transform for FFT Since the FFT is an implementation of the DFT, it provides a frequency resolution of 2π/N, where N is the length of the input sequence. If this resolution is not sufficient in a
Digital Signal Processing I Final Exam Fall 2008 ECE Dec Cover Sheet
 Digital Signal Processing I Final Exam Fall 8 ECE538 7 Dec.. 8 Cover Sheet Test Duration: minutes. Open Book but Closed Notes. Calculators NOT allowed. This test contains FIVE problems. All work should
Digital Signal Processing I Final Exam Fall 8 ECE538 7 Dec.. 8 Cover Sheet Test Duration: minutes. Open Book but Closed Notes. Calculators NOT allowed. This test contains FIVE problems. All work should
EE123 Digital Signal Processing
 Announcements EE Digital Signal Processing otes posted HW due Friday SDR give away Today! Read Ch 9 $$$ give me your names Lecture based on slides by JM Kahn M Lustig, EECS UC Berkeley M Lustig, EECS UC
Announcements EE Digital Signal Processing otes posted HW due Friday SDR give away Today! Read Ch 9 $$$ give me your names Lecture based on slides by JM Kahn M Lustig, EECS UC Berkeley M Lustig, EECS UC
! Circular Convolution. " Linear convolution with circular convolution. ! Discrete Fourier Transform. " Linear convolution through circular
 Previously ESE 531: Digital Signal Processing Lec 22: April 18, 2017 Fast Fourier Transform (con t)! Circular Convolution " Linear convolution with circular convolution! Discrete Fourier Transform " Linear
Previously ESE 531: Digital Signal Processing Lec 22: April 18, 2017 Fast Fourier Transform (con t)! Circular Convolution " Linear convolution with circular convolution! Discrete Fourier Transform " Linear
Review of Fundamentals of Digital Signal Processing
 Solution Manual for Theory and Applications of Digital Speech Processing by Lawrence Rabiner and Ronald Schafer Click here to Purchase full Solution Manual at http://solutionmanuals.info Link download
Solution Manual for Theory and Applications of Digital Speech Processing by Lawrence Rabiner and Ronald Schafer Click here to Purchase full Solution Manual at http://solutionmanuals.info Link download
6.003: Signals and Systems
 6.003: Signals and Systems Z Transform September 22, 2011 1 2 Concept Map: Discrete-Time Systems Multiple representations of DT systems. Delay R Block Diagram System Functional X + + Y Y Delay Delay X
6.003: Signals and Systems Z Transform September 22, 2011 1 2 Concept Map: Discrete-Time Systems Multiple representations of DT systems. Delay R Block Diagram System Functional X + + Y Y Delay Delay X
QUESTION BANK SIGNALS AND SYSTEMS (4 th SEM ECE)
") QUESTION BANK SIGNALS AND SYSTEMS (4 th SEM ECE) 1. For the signal shown in Fig. 1, find x(2t + 3). i. Fig. 1 2. What is the classification of the systems? 3. What are the Dirichlet s conditions of Fourier
QUESTION BANK SIGNALS AND SYSTEMS (4 th SEM ECE) 1. For the signal shown in Fig. 1, find x(2t + 3). i. Fig. 1 2. What is the classification of the systems? 3. What are the Dirichlet s conditions of Fourier
ECE 3620: Laplace Transforms: Chapter 3:
 ECE 3620: Laplace Transforms: Chapter 3: 3.1-3.4 Prof. K. Chandra ECE, UMASS Lowell September 21, 2016 1 Analysis of LTI Systems in the Frequency Domain Thus far we have understood the relationship between
ECE 3620: Laplace Transforms: Chapter 3: 3.1-3.4 Prof. K. Chandra ECE, UMASS Lowell September 21, 2016 1 Analysis of LTI Systems in the Frequency Domain Thus far we have understood the relationship between
UNIVERSITY OF OSLO. Please make sure that your copy of the problem set is complete before you attempt to answer anything.
 UNIVERSITY OF OSLO Faculty of mathematics and natural sciences Examination in INF3470/4470 Digital signal processing Day of examination: December 9th, 011 Examination hours: 14.30 18.30 This problem set
UNIVERSITY OF OSLO Faculty of mathematics and natural sciences Examination in INF3470/4470 Digital signal processing Day of examination: December 9th, 011 Examination hours: 14.30 18.30 This problem set
Analog LTI system Digital LTI system
 Sampling Decimation Seismometer Amplifier AAA filter DAA filter Analog LTI system Digital LTI system Filtering (Digital Systems) input output filter xn [ ] X ~ [ k] Convolution of Sequences hn [ ] yn [
Sampling Decimation Seismometer Amplifier AAA filter DAA filter Analog LTI system Digital LTI system Filtering (Digital Systems) input output filter xn [ ] X ~ [ k] Convolution of Sequences hn [ ] yn [
7.17. Determine the z-transform and ROC for the following time signals: Sketch the ROC, poles, and zeros in the z-plane. X(z) = x[n]z n.
![7.17. Determine the z-transform and ROC for the following time signals: Sketch the ROC, poles, and zeros in the z-plane. X(z) = x[n]z n.](/thumbs/74/70037980.jpg "7.17. Determine the z-transform and ROC for the following time signals: Sketch the ROC, poles, and zeros in the z-plane. X(z) = x[n]z n.") Solutions to Additional Problems 7.7. Determine the -transform and ROC for the following time signals: Sketch the ROC, poles, and eros in the -plane. (a) x[n] δ[n k], k > 0 X() x[n] n n k, 0 Im k multiple
Solutions to Additional Problems 7.7. Determine the -transform and ROC for the following time signals: Sketch the ROC, poles, and eros in the -plane. (a) x[n] δ[n k], k > 0 X() x[n] n n k, 0 Im k multiple