Periodic Orbits and Transport: Some Interesting Dynamics in the Three-Body Problem
|
|
|
- Annis McKinney
- 5 years ago
- Views:
Transcription
1 Periodic Orbits and Transport: Some Interesting Dynamics in the Three-Body Problem Shane Ross Martin Lo (JPL), Wang Sang Koon and Jerrold Marsden (Caltech) CDS 280, January 8, shane/ Control and Dynamical Systems
2 2 Outline Important dynamical objects: Equilibria, periodic orbits, stable and unstable manifolds, bottlenecks Context: Three-body problem (Hamiltonian) Equilibria: Collinear libration points have saddle center structure Periodic orbits: Stable and unstable invariant manifolds divide energy surface, channeling flow in phase space Classification: Interesting orbits can be classified and constructed using Poincaré sections and symbolic dynamics Theorem: Near home/heteroclinic orbits, horseshoe -like dynamics exists Application: Actual space missions
3 Simple Pendulum Connecting Orbits Equations of a simple pendulum are θ + sin θ =0. Write as a system in the plane; dθ dt = v dv dt = sin θ Solutions are trajectories in the plane. The resulting phase portrait shows some important basic features: 5
4 upright pendulum (unstable point) θ = v downward pendulum (stable point) connecting (homoclinic) orbit saddle point θ
5 7 Higher Dimensional Versions are Invariant Manifolds Stable Manifold Unstable Manifold
6 Periodic Orbits Can replace fixed points by periodic orbits and do similar things. For example, stability means nearby orbits stay nearby. 8 x 0 periodic orbit nearby trajectory winding towards the periodic orbit
7 9 Invariant Manifolds for Periodic Orbits Periodic orbits have stable and unstable manifolds. Stable Manifold (orbits move toward the periodic orbit) Unstable Manifold (orbits move away from the periodic orbit)
8 Chaotic Motion and Intermittency 3
9
10 4 Motivation: Comet Transitions Jupiter Comets such as Oterma Comets moving in the vicinity of Jupiter do so mainly under the influence of Jupiter and the Sun i.e., in a three body problem. These comets sometimes make a rapid transition from outside to inside Jupiter s orbit. Captured temporarily by Jupiter during transition. Exterior (2:3 resonance) Interior (3:2 resonance). The next figure shows the orbit of Oterma (AD ) in an inertial frame
11 5 Oterma s orbit 2:3 resonance Second encounter Jupiter y (inertial frame) START Sun 3:2 resonance END First encounter Jupiter s orbit x (inertial frame)
12 Next figure shows Oterma s orbit in a rotating frame (so Jupiter looks like it is standing still) and with some invariant manifolds in the three body problem superimposed. 6
13 7 Homoclinic Orbits Oterma's Trajectory Oterma y (rotating) 1980 Sun L 1 Jupiter L 2 y (rotating) 1910 Jupiter Heteroclinic Connection x (rotating) Boundary of Energy Surface x (rotating)
14 8 Movie: Oterma in a rotating frame
15 Planar Circular Restricted 3-Body Problem PCR3BP General Comments The two main bodies could be the Sun and Jupiter, orthe Sun and Earth, etc. The total mass is normalized to 1; they are denoted m S =1 µand m J = µ, so0<µ 1 2. The two main bodies rotate in the plane in circles counterclockwise about their common center of mass and with angular velocity normalized to 1. The third body, the comet or the spacecraft, has mass zero and is free to move in the plane. The planar restricted three-body problem is used for simplicity. Generalization to the three-dimensional problem is of course important, but many of the effects can be described well with the planar model. 9
16 Equations of Motion Notation: Choose a rotating coordinate system so that the origin is at the center of mass the Sun and Jupiter are on the x-axis at the points ( µ, 0) and (1 µ, 0) respectively i.e., the distance from the Sun to Jupiter is normalized to be 1. Let (x, y) be the position of the comet in the plane relative to the positions of the Sun and Jupiter. distances to the Sun and Jupiter: r 1 = (x + µ) 2 + y 2 and r 2 = (x 1+µ) 2 +y 2. 10
17 11 Y y Comet x Jupiter t Sun X
18 12 y comet y (nondimensional units, rotating frame) x = µ m S = 1 µ Sun r 1 r 2 x = 1 µ m J = µ Jupiter Jupiter's orbit x x (nondimensional units, rotating frame)
19 Lagrangian approach rotating frame: In the rotating frame, the Lagrangian L is given by L(x, y, ẋ, ẏ) = 1 2 ((ẋ y)2 +(x+ẏ) 2 ) U(x, y) where the gravitational potential in rotating coordinates is U = 1 µ r 1 µ r 2. Reason: Ẋ =(ẋ y)cost (x+ẏ)sint, Ẏ =(x+ẏ)cost (ẋ y)sint which yields kinetic energy (wrt inertial frame) Ẋ 2 + Ẏ 2 =(ẋ y) 2 +(x+ẏ) 2. 13
20 Also, since both the distances r 1 and r 2 are invariant under rotation, we have r 2 1 =(x+µ)2 +y 2, r 2 2 =(x (1 µ))2 + y 2. The theory of moving systems says that one can simply write down the Euler-Lagrange equations in the rotating frame and one will get the correct equations. It is a very efficient general method for computing equations for either moving systems or for systems seen from rotating frames (see Marsden & Ratiu, 1999). In the present case, the Euler-Lagrange equations are given by d dt (ẋ y)=x+ẏ U x, d dt (x +ẏ)= ẋ+y U y. 14
21 After simplification, we have the equations of motion: where ẍ 2ẏ= U eff x, U eff = (x2 + y 2 ) 2 ÿ +2ẋ= U eff y 1 µ r 1 µ r 2. They have a first integral, the Hamiltonian energy, given by E(x, y, ẋ, ẏ) = 1 2 (ẋ2 +ẏ 2 )+U eff (x, y). Energy manifolds are 3-dimensional surfaces foliating the 4-dimensional phase space. For fixed energy, Poincaré sections are then 2-dimensional, making visualization of intersections between sets in the phase space particularly simple. 15
22 16 Five Equilibrium Points Three collinear (Euler, 1767) on the x-axis L 1,L 2,L 3 Two equilateral points (Lagrange, 1772) L 4,L 5. y (nondimensional units, rotating frame) L 3 S L 1 J m S = 1 - µ m J = µ L 4 L 5 comet L 2 Jupiter's orbit x (nondimensional units, rotating frame)
23 17 The energy E is given by Energy Manifold E(x, y, ẋ, ẏ) = 1 2 (ẋ2 +ẏ 2 )+U eff (x, y) = 1 2 (ẋ2 +ẏ 2 ) 1 2 (x2 +y 2 ) 1 µ r 1 µ r 2. This energy integral will help us determine the region of possible motion, i.e., the region in which the comet can possibly move along and the region which it is forbidden to move. The first step is to look at the surface of the effective potential U eff. Note that the energy manifold is 3-dimensional.
24 U eff 18
25 Near either the Sun or Jupiter, we have a potential well. Far away from the Sun-Jupiter system, the term that corresponds to the centrifugal force dominates, we have another potential well. Moreover, by applying multivariable calculus, one finds that there are 3 saddle points at L 1,L 2,L 3 and 2 maxima at L 4 and L 5. Let E i be the energy at L i, then E 5 = E 4 >E 3 >E 2 >E 1. 19
26 Let M be the energy surface given by setting the energy integral equal to a constant, i.e., M(µ, e) ={(x, y, ẋ, ẏ) E(x, y, ẋ, ẏ) =e} (1) where e is a constant. The projection of this surface onto position space is called a Hill s region M(µ, e) ={(x, y) U eff (x, y) e}. (2) The boundary of M(µ, e) isthezero velocity curve. The comet can move only within this region in the (x, y)-plane. For a given µthere are five basic configurations for the Hill s region, the first four of which are shown in the following figure. 20
27 21 Case 1 : E<E 1 Case 2 : E 1 <E<E S J S J Case 3 : E 2 <E<E 3 Case 4 : E 3 <E<E 4 =E S J 0 S J
28 [Conley] Orbits with energy just above that of L 2 can be transit orbits, passing through the neck region between the exterior region (outside Jupiter s orbit) and the temporary capture region (bubble surrounding Jupiter). They can also be nontransit orbits or asymptotic orbits. 22 Forbidden Region Exterior Region (X) S L 1 J L 2 L 2 Interior (Sun) Region (S) Jupiter Region (J)
29 23 Flow in the L 1 and L 2 Bottlenecks: Linearization [Moser] All the qualitative results of the linearized equations carry over to the full nonlinear equations. Recall equations of PCR3BP: After linearization, ẋ = v x, ẏ = v y, ẋ = v x, ẏ = v y, v x =2v y U eff x, v y = 2v x U eff y. v x =2v y +ax, v y = 2v x by. Eigenvalues have the form ±λ and ±iν.
30 24 Corresponding eigenvectors are u 1 =(1, σ, λ, λσ), u 2 =(1,σ, λ, λσ), w 1 =(1, iτ, iν, ντ), w 2 =(1,iτ, iν, ντ).
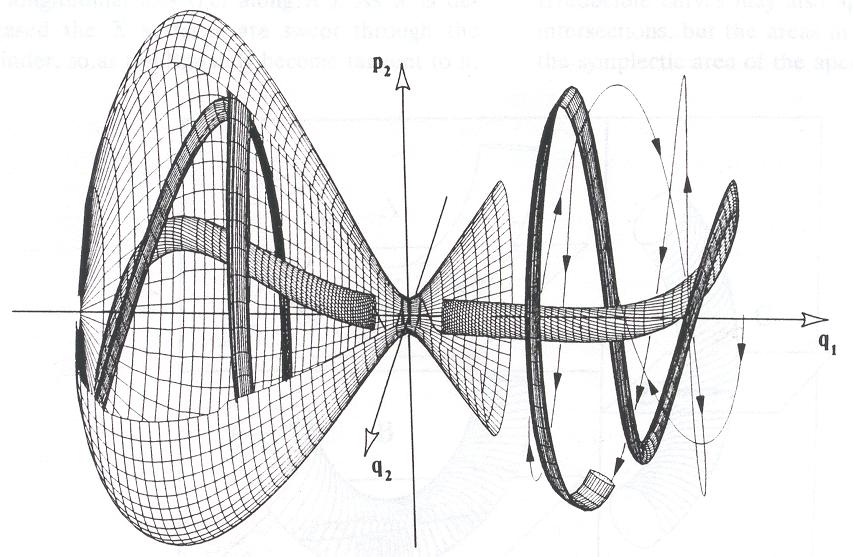
31 After linearization and making the eigenvectors the new coordinate axes, the equations of motion assume the simple form ξ = λξ, η = λη, ζ1 = νζ 2, ζ2 = νζ 1, with energy function E l = ληξ + ν 2 (ζ2 1 + ζ2 2 ). The flow near L 1,L 2 has the form of a saddle center. 25 ξ η ξ=0 ζ 2 =0 η η ξ= c η ξ=+c η+ξ=0 ζ 2 =ρ ζ 2 =0 ζ 2 =ρ
32 For each fixed value of η ξ (vertical lines in figure below), E l = E describes a 2-sphere. The equilibrium region R on the 3D energy manifold is homeomorphic to S 2 I. 26 ξ η ξ=0 ζ 2 =0 η η ξ= c η ξ=+c η+ξ=0 ζ 2 =ρ ζ 2 =0 ζ 2 =ρ
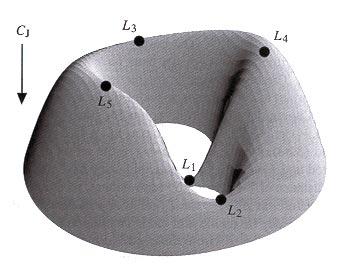
33 27 [McGehee] Can visualize 4typesof orbits in R S 2 I. Black circle is the unstable periodic Lyapunov orbit. 4 cylinders of asymptotic orbits form pieces of stable and unstable manifolds. They intersect the bounding spheres at asymptotic circles, separating spherical polar caps, which contain transit orbits, from spherical equatorial zones, which contain nontransit orbits. Transit Orbits Asymptotic Orbits ω Spherical Cap of Transit Orbits Asymptotic Circle Nontransit Orbits l Spherical Zone of Nontransit Orbits Lyapunov Orbit Cross-section of Equilibrium Region Equilibrium Region
34 Roughly speaking, for fixed energy, the equilibrium region has thedynamicsofasaddle harmonic oscillator. 28 Asymptotic Orbits Transit Orbits ω Spherical Cap of Transit Orbits Asymptotic Circle Nontransit Orbits l Spherical Zone of Nontransit Orbits Lyapunov Orbit Cross-section of Equilibrium Region Equilibrium Region
35 4 cylinders of asymptotic orbits: stable and unstable manifolds. Stable Manifold (orbits move toward the periodic orbit) 29 Unstable Manifold (orbits move away from the periodic orbit)
36 30 Invariant Manifold Tubes Partition the Energy Surface Stable and unstable manifold tubes act as separatrices for the flow in the equilibrium region. Those inside the tubes are transit orbits. Those outside the tubes are nontransit orbits. e.g., transit from outside Jupiter s orbit to Jupiter capture region possible only through L 2 periodic orbit stable tube. Forbidden Region Stable Manifold Jupiter Unstable Manifold Sun L 2 y (rotating frame) Stable Manifold Forbidden Region x (rotating frame) L 2 Periodic Orbit Unstable Manifold
37 Stable and unstable manifold tubes control the transport of material to and from the capture region. 31 Forbidden Region Stable Manifold Jupiter Unstable Manifold Sun L 2 y (rotating frame) Stable Manifold Forbidden Region x (rotating frame) L 2 Periodic Orbit Unstable Manifold
38 32 Tubes of transit orbits contain ballistic capture orbits. Jupiter Comet Begins Inside Tube Sun L 2 y (rotating frame) Ends in Ballistic Capture Passes through L 2 Equilibrium Region x (rotating frame)
39 Invariant manifold tubes are global objects extend far beyond vicinity of libration points. 33 Capture Orbit Tube of Transit Orbits y (rotating frame) Forbidden Region Sun L 2 orbit Jupiter x (rotating frame)
40 Transport between all three regions (interior, Jupiter, exterior) is controlled by the intersection of stable and unstable manifold tubes. 34 X U 3 U 4 U 1 S U 3 J L 1 L 2 J U 2 U 2
41 In particular, rapid transport between outside and inside of Jupiter s orbit is possible. Rapid Transition 35 Exterior Region Forbidden Region Sun Interior Region Jupiter Stable L 1 Manifold Manifold Unstable L 2 Jupiter Region
42 This can be seen by recalling the bounding spheres for the equilibrium regions. We will look at the images and pre-images of the spherical caps of transit orbits on a suitable Poincaré section. The images and pre-images of the spherical caps form the tubes that partition the energy surface. 36 Poincare Section U 3 (x = 1 µ, y > 0 ) d 1,2 + d 2,1 J Stable Manifold Unstable Manifold Right bounding sphere n 1,2 of L 1 equilibrium region (R 1 ) Jupiter region (J ) Left bounding sphere n 2,1 of L 2 equilibrium region (R 2 )
43 For instance, on a Poincaré section between L 1 and L 2, We look at the image of the cap on the left bounding sphere of the L 2 equilibrium region R 2 containing orbits leaving R 2. We also look at the pre-image of the cap on the right bounding sphere of R 1 containing orbits entering R 1. 37
44 The Poincaré cut of the unstable manifold of the L 2 periodic orbit forms the boundary of the image of the cap containing transit orbits leaving R 2. All of these orbits came from the exterior region and are now in the Jupiter region, so we label this region (X; J). Etc. 38 Poincare Section U 3 (x = 1 µ, y > 0 ) d 1,2 + d 2,1 J Stable Manifold Unstable Manifold Right bounding sphere n 1,2 of L 1 equilibrium region (R 1 ) Jupiter region (J ) Left bounding sphere n 2,1 of L 2 equilibrium region (R 2 )
45 Pre-Image of Spherical Cap d 1,2 + (;J,S) y (X;J) Image of Spherical Cap d 2, y Poincare Section U 3 (x = 1 µ, y > 0 ) d 1,2 + d 2,1 J Stable Manifold Unstable Manifold Right bounding sphere n 1,2 of L 1 equilibrium region (R 1 ) Jupiter region (J ) Left bounding sphere n 2,1 of L 2 equilibrium region (R 2 )
46 The dynamics of the invariant manifold tubes naturally suggest the itinerary representation. 40 y (rotating frame) Forbidden Region Forbidden Region Poincare section J L 1 L Stable Unstable 2 Manifold Manifold y (;J,S) Stable Manifold Cut (X;J) Unstable Manifold Cut y (;J,S) (X;J) Intersection Region J = (X;J,S) Stable Manifold Cut Unstable Manifold Cut x (rotating frame) y y
47 Integrating an initial condition in the intersection region would give us an orbit with the desired itinerary (X, J, S). Rapid Transition 41 Exterior Region Forbidden Region Sun Interior Region Jupiter Stable L 1 Manifold Manifold Unstable L 2 Jupiter Region
48 Global Orbit Structure: Overview Found heteroclinic connection between pair of periodic orbits. Find a large class of orbits near this (homo/heteroclinic) chain. Comet can follow these channels in rapid transition. y (AU, Sun-Jupiter rotating frame) Homoclinic Orbit Sun Homoclinic Orbit L1 L 2 Sun Jupiter L 1 L 2 Heteroclinic Connection y (AU, Sun-Jupiter rotating frame) Jupiter s Orbit x (AU, Sun-Jupiter rotating frame) x (AU, Sun-Jupiter rotating frame) -0.8
49 Global Orbit Structure: Energy Manifold Schematic view of energy manifold. y (AU, Sun-Jupiter rotating frame) Homoclinic Orbit Sun Homoclinic Orbit L1 L 2 Sun Jupiter L 1 L 2 Heteroclinic Connection y (AU, Sun-Jupiter rotating frame) Jupiter s Orbit x (AU, Sun-Jupiter rotating frame) x (AU, Sun-Jupiter rotating frame) -0.8 n 1,1 n 1,2 U 3 x = 1 µ n 2,1 n 2,2 a 1,1 a 1,2 + A 2 ' B 2 ' a 2,1 a 2,2 + G 2 ' H 2 ' U 1 y = 0 A 1 B 1 A 1 ' B 1 ' C 1 D 1 + a 1,1 a 1,2 E 1 F 1 G 1 H 1 p 1,2 A 2 B 2 G 1 ' H 1 ' C 2 D 2 + a 2,1 a 2,2 E 2 F 2 G 2 H 2 p 2,2 U 4 y = 0 p 1,1 U 2 x = 1 µ p 2,1 interior region (S ) L 1 equilibrium region (R 1 ) Jupiter region (J ) L 2 equilibrium region (R 2 ) exterior region (X )
50 Global Orbit Structure: Poincaré Map Reducing study of global orbit structure to study of discrete map. n 1,1 n 1,2 U 3 x = 1 µ n 2,1 n 2,2 a 1,1 a 1,2 + A 2 ' B 2 ' a 2,1 a 2,2 + G 2 ' H 2 ' U 1 y = 0 A 1 B 1 A 1 ' B 1 ' C 1 D 1 + a 1,1 a 1,2 E 1 F 1 G 1 H 1 p 1,2 A 2 B 2 G 1 ' H 1 ' C 2 D 2 + a 2,1 a 2,2 E 2 F 2 G 2 H 2 p 2,2 U 4 y = 0 p 1,1 U 2 x = 1 µ p 2,1 interior region (S ) L 1 equilibrium region (R 1 ) Jupiter region (J ) L 2 equilibrium region (R 2 ) exterior region (X ) x = 1 µ U 3 U 1 y = 0 interior region Jupiter region exterior region y = 0 U 4 U 2 D 1 C 1 A 1 ' B 1 ' H 1 ' G 1 ' x = 1 µ C 2 D 2 B 2 ' A 2 ' E 1 F 1 F 2 E 2 G 2 ' H 2 ' U 1 U 2 U 3 U 4
51 Construction of Poincaré Map Construct Poincaré map P (tranversal to the flow) whose domain U consists of 4 squares U i. Squares U 1 and U 4 contained in y =0, each centers around a transversal homoclinic point. Squares U 2 and U 3 contained in x =1 µ, each centers around a transversal heteroclinic point. n 1,1 n 1,2 U 3 x = 1 µ n 2,1 n 2,2 a 1,1 a 1,2 + A 2 ' B 2 ' a 2,1 a 2,2 + G 2 ' H 2 ' U 1 y = 0 A 1 B 1 A 1 ' B 1 ' C 1 D 1 + a 1,1 a 1,2 E 1 F 1 G 1 H 1 p 1,2 A 2 B 2 G 1 ' H 1 ' C 2 D 2 + a 2,1 a 2,2 E 2 F 2 G 2 H 2 p 2,2 U 4 y = 0 p 1,1 U 2 x = 1 µ p 2,1 interior region (S ) L 1 equilibrium region (R 1 ) Jupiter region (J ) L 2 equilibrium region (R 2 ) exterior region (X )
52 Global Orbit Structure near the Chain Consider invariant set Λ of points in U whose images and preimages under all iterations of P remain in U. Λ= n= P n (U). Invariant set Λ contains all recurrent orbits near the chain. It provides insight into the global dynamics around the chain. Chaos theory told us to first consider only the first forward and backward iterations: Λ 1 = P 1 (U) U P 1 (U). U 3 x = 1 µ U 1 y = 0 interior region Jupiter region exterior region y = 0 U 4 U 2 D 1 C 1 A 1 ' B 1 ' H 1 ' G 1 ' x = 1 µ C 2 D 2 B 2 ' A 2 ' E 1 F 1 F 2 E 2 G 2 ' H 2 ' U 1 U 2 U 3 U 4
53 Review of Horseshoe Dynamics: Pendulum
54 Review of Horseshoe Dynamics: Forced Pendulum
55 Review of Horseshoe Dynamics: First Iteration
56 Review of Horseshoe Dynamics: First Iteration
57 Review of Horseshoe Dynamics: Second Iteration
58 Review of Horseshoe Dynamics: Second Iteration...0,0;...1,0;...1,1;...0,1; ;1, ,0;1,1... ;1,1... ;0,1... D ;0,0...
59 Conley-Moser Conditions: Horseshoe-type Map For horseshoe-type map h satisfying Conley-Moser conditions, the invariant set of all iterations, Λ h = n= hn (Q), can be constructed and visualized in a standard way. Strip condition: h maps horizontal strips H 0,H 1 to vertical strips V 0,V 1, (with horizontal boundaries to horizontal boundaries and vertical boundaries to vertical boundaries). Hyperbolicity condition: h has uniform contraction in horizontal direction and expansion in vertical direction....0,0;...1,0;...1,1;...0,1; ;1, ,0;1,1... ;1,1... ;0,1... D ;0,0...
60 Generalized Conley-Moser Conditions Proved P satisfies Generalized Conley-Moser conditions: Strip condition: it maps horizontal strips Hn ij to vertical strips Vn ji. Hyperbolicity condition: it has uniform contraction in horizontal direction and expansion in vertical direction. U 3 E 1 F 1 A 2 ' B 2 ' C 1 E 2 U 1 U 4 D 1 F 2 A 1 ' B 1 ' C 2 G 2 ' H 2 ' D 2 H 1 ' G 1 ' U 2
61 Generalized Conley-Moser Conditions Shown are invariant set Λ 1 under first iteration. Since P satisfies Generalized Conley-Moser Conditions, this process can be repeated ad infinitum. What remains is invariant set of points Λ which are in 1-to-1 corr. with set of bi-infinite sequences (...,u i,m; u j,n,u k,...). U 3 E 1 H n 31 C 1 D 1 A 2 'B 2 ' A 1 ' B 1 ' A 1 'B 1 ' F 1 V m 34 H n 32 V m 32 H 2 C 1 V m 13 H n 11 V m 11 A 2 ' B 2 ' E 2 V m 44 H n 43 V m 42 D 1 H n 12 F 2 H n 44 H 2 C 2 D 2 3;12 Q m;n U 1 C 2 V m 21 H n 23 V m 23 G 2 ' U 4 H 2 ' D 2 H n 24 H 2 H 1 ' U 2 G 1 '
62 Global Orbit Structure: Main Theorem Main Theorem: For any admissible itinerary, e.g., (...,X, 1, J, 0; S, 1, J, 2, X,...), there exists an orbit whose whereabouts matches this itinerary. Can even specify number of revolutions the comet makes around Sun & Jupiter. S L 1 J L 2 X
63 Global Orbit Structure: Dynamical Channels Found a large class of orbits near homo/heteroclinic chain. Comet can follow these channels in rapid transition. y (AU, Sun-Jupiter rotating frame) Homoclinic Orbit Sun Homoclinic Orbit L1 L 2 Sun Jupiter L 1 L 2 Heteroclinic Connection y (AU, Sun-Jupiter rotating frame) Jupiter s Orbit x (AU, Sun-Jupiter rotating frame) x (AU, Sun-Jupiter rotating frame) -0.8
64 42 Lunar Capture: How to get to the Moon Cheaply Using the invariant manifold tubes as the building blocks, we can construct interesting, fuel saving space mission trajectories. For instance, an Earth-to-Moon ballistic capture orbit. Uses Sun s perturbation. Jump from Sun-Earth-S/C system to Earth-Moon-S/C system. Saves about 20% of onboard fuel compared to Apollo-like transfer.
65 43 Maneuver ( V) at Patch Point Earth Targeting Portion Using "Twisting" Lunar Capture Portion Sun y L 2 Moon's Orbit Earth L 2 orbit x
66 Intersection found between Earth-Moon stable manifold and Sun-Earth unstable manifold, which targets trajectory back to Earth. Sun-Earth L 2 Orbit Unstable Manifold Cut Initial Condition Earth Backward Targeting Portion Using "Twisting" 44 y (Sun-Earth rotating frame) Initial Condition Earth-Moon L 2 Orbit Stable Manifold Cut Lunar Capture Portion Sun Moon's Orbit y Earth L 2 L 2 orbit y (Sun-Earth rotating frame) Poincare Section x
67 45 Movie: Shoot the Moon in rotating frame
68 46 Future Research Directions For a single 3-body system: When is 3-body effect more important than 2-body? Find sweet spot within tubes where transport is most efficient/fastest? Consider continuous low-thrust control, optimal control. For coupling multiple 3-body systems: Where to jump from one 3-body system to another? Optimal control: trade off between travel time and fuel. Efficient use of resonances Planetary science/astronomy applications: Statistics: transport rates, capture probabilities, etc. Chemical/atomic physics applications?
69 Final Thought: For a class of Hamiltonian systems which have phase space bottlenecks containing unstable periodic orbits, the unstable and stable manifolds of those periodic orbits partition the part of the energy surface where transport is possible. The manifolds not only provide a picture of the global behavior of the system, but are the starting point for obtaining the statistical properties of the system. 47
70 48 Further Information Koon, W.S., M.W. Lo, J.E. Marsden and S.D. Ross [2000], Heteroclinic connections between periodic orbits and resonance transitions in celestial mechanics, Chaos, vol. 10(2), pp Koon, W.S., M.W. Lo, J.E. Marsden and S.D. Ross [2000], Low energy transfer to the Moon. Jaffé, C., D. Farrelly and T. Uzer [1999], Transition state in atomic physics, Phys. Rev. A, vol. 60(5), pp shane/
Periodic Orbits and Transport: From the Three-Body Problem to Atomic Physics
 Periodic Orbits and Transport: From the Three-Body Problem to Atomic Physics Shane Ross Martin Lo (JPL), Wang Sang Koon and Jerrold Marsden (Caltech) CDS 280, November 13, 2000 shane@cds.caltech.edu http://www.cds.caltech.edu/
Periodic Orbits and Transport: From the Three-Body Problem to Atomic Physics Shane Ross Martin Lo (JPL), Wang Sang Koon and Jerrold Marsden (Caltech) CDS 280, November 13, 2000 shane@cds.caltech.edu http://www.cds.caltech.edu/
Dynamical Systems and Space Mission Design
 Dynamical Systems and Space Mission Design Jerrold Marsden, Wang Koon and Martin Lo Wang Sang Koon Control and Dynamical Systems, Caltech koon@cds.caltech.edu The Flow near L and L 2 : Outline Outline
Dynamical Systems and Space Mission Design Jerrold Marsden, Wang Koon and Martin Lo Wang Sang Koon Control and Dynamical Systems, Caltech koon@cds.caltech.edu The Flow near L and L 2 : Outline Outline
Dynamical Systems and Space Mission Design
 Dynamical Systems and Space Mission Design Jerrold Marsden, Wang Sang Koon and Martin Lo Shane Ross Control and Dynamical Systems, Caltech shane@cds.caltech.edu Constructing Orbits of Prescribed Itineraries:
Dynamical Systems and Space Mission Design Jerrold Marsden, Wang Sang Koon and Martin Lo Shane Ross Control and Dynamical Systems, Caltech shane@cds.caltech.edu Constructing Orbits of Prescribed Itineraries:
Cylindrical Manifolds and Tube Dynamics in the Restricted Three-Body Problem
 C C Dynamical A L T E C S H Cylindrical Manifolds and Tube Dynamics in the Restricted Three-Body Problem Shane D. Ross Control and Dynamical Systems, Caltech www.cds.caltech.edu/ shane/pub/thesis/ April
C C Dynamical A L T E C S H Cylindrical Manifolds and Tube Dynamics in the Restricted Three-Body Problem Shane D. Ross Control and Dynamical Systems, Caltech www.cds.caltech.edu/ shane/pub/thesis/ April
The Coupled Three-Body Problem and Ballistic Lunar Capture
 The Coupled Three-Bod Problem and Ballistic Lunar Capture Shane Ross Martin Lo (JPL), Wang Sang Koon and Jerrold Marsden (Caltech) Control and Dnamical Sstems California Institute of Technolog Three Bod
The Coupled Three-Bod Problem and Ballistic Lunar Capture Shane Ross Martin Lo (JPL), Wang Sang Koon and Jerrold Marsden (Caltech) Control and Dnamical Sstems California Institute of Technolog Three Bod
Dynamical Systems and Space Mission Design
 Dnamical Sstems and Space Mission Design Wang Koon, Martin Lo, Jerrold Marsden and Shane Ross Wang Sang Koon Control and Dnamical Sstems, Caltech koon@cds.caltech.edu Acknowledgements H. Poincaré, J. Moser
Dnamical Sstems and Space Mission Design Wang Koon, Martin Lo, Jerrold Marsden and Shane Ross Wang Sang Koon Control and Dnamical Sstems, Caltech koon@cds.caltech.edu Acknowledgements H. Poincaré, J. Moser
Invariant Manifolds and Transport in the Three-Body Problem
 Dynamical S C C A L T E C H Invariant Manifolds and Transport in the Three-Body Problem Shane D. Ross Control and Dynamical Systems California Institute of Technology Classical N-Body Systems and Applications
Dynamical S C C A L T E C H Invariant Manifolds and Transport in the Three-Body Problem Shane D. Ross Control and Dynamical Systems California Institute of Technology Classical N-Body Systems and Applications
Connecting orbits and invariant manifolds in the spatial three-body problem
 C C Dynamical A L T E C S H Connecting orbits and invariant manifolds in the spatial three-body problem Shane D. Ross Control and Dynamical Systems, Caltech Work with G. Gómez, W. Koon, M. Lo, J. Marsden,
C C Dynamical A L T E C S H Connecting orbits and invariant manifolds in the spatial three-body problem Shane D. Ross Control and Dynamical Systems, Caltech Work with G. Gómez, W. Koon, M. Lo, J. Marsden,
Heteroclinic Connections between Periodic Orbits and Resonance Transitions in Celestial Mechanics
 Heteroclinic Connections between Periodic Orbits and Resonance Transitions in Celestial Mechanics Wang Sang Koon Control and Dynamical Systems and JPL Caltech 17-81, Pasadena, CA 91125 koon@cds.caltech.edu
Heteroclinic Connections between Periodic Orbits and Resonance Transitions in Celestial Mechanics Wang Sang Koon Control and Dynamical Systems and JPL Caltech 17-81, Pasadena, CA 91125 koon@cds.caltech.edu
Design of Low Energy Space Missions using Dynamical Systems Theory
 Design of Low Energy Space Missions using Dynamical Systems Theory Koon, Lo, Marsden, and Ross W.S. Koon (Caltech) and S.D. Ross (USC) CIMMS Workshop, October 7, 24 Acknowledgements H. Poincaré, J. Moser
Design of Low Energy Space Missions using Dynamical Systems Theory Koon, Lo, Marsden, and Ross W.S. Koon (Caltech) and S.D. Ross (USC) CIMMS Workshop, October 7, 24 Acknowledgements H. Poincaré, J. Moser
Invariant Manifolds, Material Transport and Space Mission Design
 C A L T E C H Control & Dynamical Systems Invariant Manifolds, Material Transport and Space Mission Design Shane D. Ross Control and Dynamical Systems, Caltech Candidacy Exam, July 27, 2001 Acknowledgements
C A L T E C H Control & Dynamical Systems Invariant Manifolds, Material Transport and Space Mission Design Shane D. Ross Control and Dynamical Systems, Caltech Candidacy Exam, July 27, 2001 Acknowledgements
Heteroclinic connections between periodic orbits and resonance transitions in celestial mechanics
 CHAOS VOLUME 10, NUMBER 2 JUNE 2000 Heteroclinic connections between periodic orbits and resonance transitions in celestial mechanics Wang Sang Koon a) Control and Dynamical Systems, Caltech 107-81, Pasadena,
CHAOS VOLUME 10, NUMBER 2 JUNE 2000 Heteroclinic connections between periodic orbits and resonance transitions in celestial mechanics Wang Sang Koon a) Control and Dynamical Systems, Caltech 107-81, Pasadena,
Chaotic Motion in the Solar System: Mapping the Interplanetary Transport Network
 C C Dynamical A L T E C S H Chaotic Motion in the Solar System: Mapping the Interplanetary Transport Network Shane D. Ross Control and Dynamical Systems, Caltech http://www.cds.caltech.edu/ shane W.S.
C C Dynamical A L T E C S H Chaotic Motion in the Solar System: Mapping the Interplanetary Transport Network Shane D. Ross Control and Dynamical Systems, Caltech http://www.cds.caltech.edu/ shane W.S.
Design of a Multi-Moon Orbiter
 C C Dynamical A L T E C S H Design of a Multi-Moon Orbiter Shane D. Ross Control and Dynamical Systems and JPL, Caltech W.S. Koon, M.W. Lo, J.E. Marsden AAS/AIAA Space Flight Mechanics Meeting Ponce, Puerto
C C Dynamical A L T E C S H Design of a Multi-Moon Orbiter Shane D. Ross Control and Dynamical Systems and JPL, Caltech W.S. Koon, M.W. Lo, J.E. Marsden AAS/AIAA Space Flight Mechanics Meeting Ponce, Puerto
From the Earth to the Moon: the weak stability boundary and invariant manifolds -
 From the Earth to the Moon: the weak stability boundary and invariant manifolds - Priscilla A. Sousa Silva MAiA-UB - - - Seminari Informal de Matemàtiques de Barcelona 05-06-2012 P.A. Sousa Silva (MAiA-UB)
From the Earth to the Moon: the weak stability boundary and invariant manifolds - Priscilla A. Sousa Silva MAiA-UB - - - Seminari Informal de Matemàtiques de Barcelona 05-06-2012 P.A. Sousa Silva (MAiA-UB)
INTERPLANETARY AND LUNAR TRANSFERS USING LIBRATION POINTS
 INTERPLANETARY AND LUNAR TRANSFERS USING LIBRATION POINTS Francesco Topputo (), Massimiliano Vasile () and Franco Bernelli-Zazzera () () Dipartimento di Ingegneria Aerospaziale, Politecnico di Milano,
INTERPLANETARY AND LUNAR TRANSFERS USING LIBRATION POINTS Francesco Topputo (), Massimiliano Vasile () and Franco Bernelli-Zazzera () () Dipartimento di Ingegneria Aerospaziale, Politecnico di Milano,
Dynamical Systems and Control in Celestial Mechanics and Space Mission Design. Jerrold E. Marsden
 C A L T E C H Control & Dynamical Systems Dynamical Systems and Control in Celestial Mechanics and Space Mission Design Jerrold E. Marsden Control and Dynamical Systems, Caltech http://www.cds.caltech.edu/
C A L T E C H Control & Dynamical Systems Dynamical Systems and Control in Celestial Mechanics and Space Mission Design Jerrold E. Marsden Control and Dynamical Systems, Caltech http://www.cds.caltech.edu/
Design of low energy space missions using dynamical systems theory
 C C Dynamical A L T E C S H Design of low energy space missions using dynamical systems theory Shane D. Ross Control and Dynamical Systems, Caltech www.cds.caltech.edu/ shane Collaborators: J.E. Marsden
C C Dynamical A L T E C S H Design of low energy space missions using dynamical systems theory Shane D. Ross Control and Dynamical Systems, Caltech www.cds.caltech.edu/ shane Collaborators: J.E. Marsden
Design of a Multi-Moon Orbiter. Jerrold E. Marsden
 C A L T E C H Control & Dynamical Systems Design of a Multi-Moon Orbiter Jerrold E. Marsden Control and Dynamical Systems, Caltech http://www.cds.caltech.edu/ marsden/ Wang Sang Koon (CDS), Martin Lo (JPL),
C A L T E C H Control & Dynamical Systems Design of a Multi-Moon Orbiter Jerrold E. Marsden Control and Dynamical Systems, Caltech http://www.cds.caltech.edu/ marsden/ Wang Sang Koon (CDS), Martin Lo (JPL),
Cylindrical Manifolds and Tube Dynamics in the Restricted Three-Body Problem
 Cylindrical Manifolds and Tube Dynamics in the Restricted Three-Body Problem Thesis by Shane David Ross In Partial Fulfillment of the Requirements for the Degree of Doctor of Philosophy California Institute
Cylindrical Manifolds and Tube Dynamics in the Restricted Three-Body Problem Thesis by Shane David Ross In Partial Fulfillment of the Requirements for the Degree of Doctor of Philosophy California Institute
Connecting orbits and invariant manifolds in the spatial restricted three-body problem
 INSTITUTE OF PHYSICS PUBLISHING Nonlinearity 17 (2004) 1571 1606 NONLINEARITY PII: S0951-7715(04)67794-2 Connecting orbits and invariant manifolds in the spatial restricted three-body problem GGómez 1,WSKoon
INSTITUTE OF PHYSICS PUBLISHING Nonlinearity 17 (2004) 1571 1606 NONLINEARITY PII: S0951-7715(04)67794-2 Connecting orbits and invariant manifolds in the spatial restricted three-body problem GGómez 1,WSKoon
Invariant Manifolds, Spatial 3-Body Problem and Space Mission Design
 Invariant Manifolds, Spatial 3-Bod Problem and Space Mission Design Góme, Koon, Lo, Marsden, Masdemont and Ross Wang Sang Koon Control and Dnamical Sstems, Caltech koon@cdscaltechedu Acknowledgements H
Invariant Manifolds, Spatial 3-Bod Problem and Space Mission Design Góme, Koon, Lo, Marsden, Masdemont and Ross Wang Sang Koon Control and Dnamical Sstems, Caltech koon@cdscaltechedu Acknowledgements H
Set oriented methods, invariant manifolds and transport
 C C Dynamical A L T E C S H Set oriented methods, invariant manifolds and transport Shane D. Ross Control and Dynamical Systems, Caltech www.cds.caltech.edu/ shane Caltech/MIT/NASA: W.S. Koon, F. Lekien,
C C Dynamical A L T E C S H Set oriented methods, invariant manifolds and transport Shane D. Ross Control and Dynamical Systems, Caltech www.cds.caltech.edu/ shane Caltech/MIT/NASA: W.S. Koon, F. Lekien,
Dynamical system theory and numerical methods applied to Astrodynamics
 Dynamical system theory and numerical methods applied to Astrodynamics Roberto Castelli Institute for Industrial Mathematics University of Paderborn BCAM, Bilbao, 20th December, 2010 Introduction Introduction
Dynamical system theory and numerical methods applied to Astrodynamics Roberto Castelli Institute for Industrial Mathematics University of Paderborn BCAM, Bilbao, 20th December, 2010 Introduction Introduction
Dynamical Systems, the Three-Body Problem
 Dynamical Systems, the Three-Body Problem and Space Mission Design Wang Sang Koon, Martin W. Lo, Jerrold E. Marsden, Shane D. Ross Control and Dynamical Systems, Caltech and JPL, Pasadena, California,
Dynamical Systems, the Three-Body Problem and Space Mission Design Wang Sang Koon, Martin W. Lo, Jerrold E. Marsden, Shane D. Ross Control and Dynamical Systems, Caltech and JPL, Pasadena, California,
Barcelona, Spain. RTBP, collinear points, periodic orbits, homoclinic orbits. Resumen
 XX Congreso de Ecuaciones Diferenciales y Aplicaciones X Congreso de Matemática Aplicada Sevilla, 24-28 septiembre 27 (pp. 1 8) The dynamics around the collinear point L 3 of the RTBP E. Barrabés 1, J.M.
XX Congreso de Ecuaciones Diferenciales y Aplicaciones X Congreso de Matemática Aplicada Sevilla, 24-28 septiembre 27 (pp. 1 8) The dynamics around the collinear point L 3 of the RTBP E. Barrabés 1, J.M.
Dynamical Systems and Space Mission Design
 Dynamical Systems and Space Mission Design Jerrold Marsden, Wang Koon and Martin Lo Wang Sang Koon Control and Dynamical Systems, Caltech koon@cds.caltech.edu Halo Orbit and Its Computation From now on,
Dynamical Systems and Space Mission Design Jerrold Marsden, Wang Koon and Martin Lo Wang Sang Koon Control and Dynamical Systems, Caltech koon@cds.caltech.edu Halo Orbit and Its Computation From now on,
Earth-to-Halo Transfers in the Sun Earth Moon Scenario
 Earth-to-Halo Transfers in the Sun Earth Moon Scenario Anna Zanzottera Giorgio Mingotti Roberto Castelli Michael Dellnitz IFIM, Universität Paderborn, Warburger Str. 100, 33098 Paderborn, Germany (e-mail:
Earth-to-Halo Transfers in the Sun Earth Moon Scenario Anna Zanzottera Giorgio Mingotti Roberto Castelli Michael Dellnitz IFIM, Universität Paderborn, Warburger Str. 100, 33098 Paderborn, Germany (e-mail:
COMPARISON OF LOW-ENERGY LUNAR TRANSFER TRAJECTORIES TO INVARIANT MANIFOLDS
 AAS 11-423 COMPARISON OF LOW-ENERGY LUNAR TRANSFER TRAJECTORIES TO INVARIANT MANIFOLDS Rodney L. Anderson and Jeffrey S. Parker INTRODUCTION In this study, transfer trajectories from the Earth to the Moon
AAS 11-423 COMPARISON OF LOW-ENERGY LUNAR TRANSFER TRAJECTORIES TO INVARIANT MANIFOLDS Rodney L. Anderson and Jeffrey S. Parker INTRODUCTION In this study, transfer trajectories from the Earth to the Moon
Interplanetary Trajectory Design using Dynamical Systems Theory
 Interplanetary Trajectory Design using Dynamical Systems Theory THESIS REPORT by Linda van der Ham 8 February 2012 The image on the front is an artist impression of the Interplanetary Superhighway [NASA,
Interplanetary Trajectory Design using Dynamical Systems Theory THESIS REPORT by Linda van der Ham 8 February 2012 The image on the front is an artist impression of the Interplanetary Superhighway [NASA,
Invariant Manifolds of Dynamical Systems and an application to Space Exploration
 Invariant Manifolds of Dynamical Systems and an application to Space Exploration Mateo Wirth January 13, 2014 1 Abstract In this paper we go over the basics of stable and unstable manifolds associated
Invariant Manifolds of Dynamical Systems and an application to Space Exploration Mateo Wirth January 13, 2014 1 Abstract In this paper we go over the basics of stable and unstable manifolds associated
Optimal Titan Trajectory Design Using Invariant Manifolds and Resonant Gravity Assists. Final Summer Undergraduate Research Fellowship Report
 Optimal Titan Trajectory Design Using Invariant Manifolds and Resonant Gravity Assists Final Summer Undergraduate Research Fellowship Report September 25, 2009 Natasha Bosanac Mentor: Professor Jerrold
Optimal Titan Trajectory Design Using Invariant Manifolds and Resonant Gravity Assists Final Summer Undergraduate Research Fellowship Report September 25, 2009 Natasha Bosanac Mentor: Professor Jerrold
TRANSFER TO THE COLLINEAR LIBRATION POINT L 3 IN THE SUN-EARTH+MOON SYSTEM
 TRANSFER TO THE COLLINEAR LIBRATION POINT L 3 IN THE SUN-EARTH+MOON SYSTEM HOU Xi-yun,2 TANG Jing-shi,2 LIU Lin,2. Astronomy Department, Nanjing University, Nanjing 20093, China 2. Institute of Space Environment
TRANSFER TO THE COLLINEAR LIBRATION POINT L 3 IN THE SUN-EARTH+MOON SYSTEM HOU Xi-yun,2 TANG Jing-shi,2 LIU Lin,2. Astronomy Department, Nanjing University, Nanjing 20093, China 2. Institute of Space Environment
Chaotic transport through the solar system
 The Interplanetary Superhighway Chaotic transport through the solar system Richard Taylor rtaylor@tru.ca TRU Math Seminar, April 12, 2006 p. 1 The N -Body Problem N masses interact via mutual gravitational
The Interplanetary Superhighway Chaotic transport through the solar system Richard Taylor rtaylor@tru.ca TRU Math Seminar, April 12, 2006 p. 1 The N -Body Problem N masses interact via mutual gravitational
Low-Energy Earth-to-Halo Transfers in the Earth Moon Scenario with Sun-Perturbation
 Low-Energy Earth-to-Halo Transfers in the Earth Moon Scenario with Sun-Perturbation Anna Zanzottera, Giorgio Mingotti, Roberto Castelli and Michael Dellnitz Abstract In this work, trajectories connecting
Low-Energy Earth-to-Halo Transfers in the Earth Moon Scenario with Sun-Perturbation Anna Zanzottera, Giorgio Mingotti, Roberto Castelli and Michael Dellnitz Abstract In this work, trajectories connecting
TRANSFER ORBITS GUIDED BY THE UNSTABLE/STABLE MANIFOLDS OF THE LAGRANGIAN POINTS
 TRANSFER ORBITS GUIDED BY THE UNSTABLE/STABLE MANIFOLDS OF THE LAGRANGIAN POINTS Annelisie Aiex Corrêa 1, Gerard Gómez 2, Teresinha J. Stuchi 3 1 DMC/INPE - São José dos Campos, Brazil 2 MAiA/UB - Barcelona,
TRANSFER ORBITS GUIDED BY THE UNSTABLE/STABLE MANIFOLDS OF THE LAGRANGIAN POINTS Annelisie Aiex Corrêa 1, Gerard Gómez 2, Teresinha J. Stuchi 3 1 DMC/INPE - São José dos Campos, Brazil 2 MAiA/UB - Barcelona,
Identifying Safe Zones for Planetary Satellite Orbiters
 AIAA/AAS Astrodynamics Specialist Conference and Exhibit 16-19 August 2004, Providence, Rhode Island AIAA 2004-4862 Identifying Safe Zones for Planetary Satellite Orbiters M.E. Paskowitz and D.J. Scheeres
AIAA/AAS Astrodynamics Specialist Conference and Exhibit 16-19 August 2004, Providence, Rhode Island AIAA 2004-4862 Identifying Safe Zones for Planetary Satellite Orbiters M.E. Paskowitz and D.J. Scheeres
CDS 101 Precourse Phase Plane Analysis and Stability
 CDS 101 Precourse Phase Plane Analysis and Stability Melvin Leok Control and Dynamical Systems California Institute of Technology Pasadena, CA, 26 September, 2002. mleok@cds.caltech.edu http://www.cds.caltech.edu/
CDS 101 Precourse Phase Plane Analysis and Stability Melvin Leok Control and Dynamical Systems California Institute of Technology Pasadena, CA, 26 September, 2002. mleok@cds.caltech.edu http://www.cds.caltech.edu/
April 13, We now extend the structure of the horseshoe to more general kinds of invariant. x (v) λ n v.
 λ n v.") April 3, 005 - Hyperbolic Sets We now extend the structure of the horseshoe to more general kinds of invariant sets. Let r, and let f D r (M) where M is a Riemannian manifold. A compact f invariant set
April 3, 005 - Hyperbolic Sets We now extend the structure of the horseshoe to more general kinds of invariant sets. Let r, and let f D r (M) where M is a Riemannian manifold. A compact f invariant set
TWO APPROACHES UTILIZING INVARIANT MANIFOLDS TO DESIGN TRAJECTORIES FOR DMOC OPTIMIZATION
 TWO APPROACHES UTILIZING INVARIANT MANIFOLDS TO DESIGN TRAJECTORIES FOR DMOC OPTIMIZATION INTRODUCTION Ashley Moore Invariant manifolds of the planar circular restricted 3-body problem are used to design
TWO APPROACHES UTILIZING INVARIANT MANIFOLDS TO DESIGN TRAJECTORIES FOR DMOC OPTIMIZATION INTRODUCTION Ashley Moore Invariant manifolds of the planar circular restricted 3-body problem are used to design
Halo Orbit Mission Correction Maneuvers Using Optimal Control
 Halo Orbit Mission Correction Maneuvers Using Optimal Control Radu Serban and Linda Petzold (UCSB) Wang Koon, Jerrold Marsden and Shane Ross (Caltech) Martin Lo and Roby Wilson (JPL) Wang Sang Koon Control
Halo Orbit Mission Correction Maneuvers Using Optimal Control Radu Serban and Linda Petzold (UCSB) Wang Koon, Jerrold Marsden and Shane Ross (Caltech) Martin Lo and Roby Wilson (JPL) Wang Sang Koon Control
Chapter 23. Predicting Chaos The Shift Map and Symbolic Dynamics
 Chapter 23 Predicting Chaos We have discussed methods for diagnosing chaos, but what about predicting the existence of chaos in a dynamical system. This is a much harder problem, and it seems that the
Chapter 23 Predicting Chaos We have discussed methods for diagnosing chaos, but what about predicting the existence of chaos in a dynamical system. This is a much harder problem, and it seems that the
ISOLATING BLOCKS NEAR THE COLLINEAR RELATIVE EQUILIBRIA OF THE THREE-BODY PROBLEM
 ISOLATING BLOCKS NEAR THE COLLINEAR RELATIVE EQUILIBRIA OF THE THREE-BODY PROBLEM RICHARD MOECKEL Abstract. The collinear relative equilibrium solutions are among the few explicitly known periodic solutions
ISOLATING BLOCKS NEAR THE COLLINEAR RELATIVE EQUILIBRIA OF THE THREE-BODY PROBLEM RICHARD MOECKEL Abstract. The collinear relative equilibrium solutions are among the few explicitly known periodic solutions
BINARY ASTEROID PAIRS A Systematic Investigation of the Full Two-Body Problem
 BINARY ASTEROID PAIRS A Systematic Investigation of the Full Two-Body Problem Michael Priolo Jerry Marsden, Ph.D., Mentor Shane Ross, Graduate Student, Co-Mentor Control and Dynamical Systems 107-81 Caltech,
BINARY ASTEROID PAIRS A Systematic Investigation of the Full Two-Body Problem Michael Priolo Jerry Marsden, Ph.D., Mentor Shane Ross, Graduate Student, Co-Mentor Control and Dynamical Systems 107-81 Caltech,
Nonlinear dynamics & chaos BECS
 Nonlinear dynamics & chaos BECS-114.7151 Phase portraits Focus: nonlinear systems in two dimensions General form of a vector field on the phase plane: Vector notation: Phase portraits Solution x(t) describes
Nonlinear dynamics & chaos BECS-114.7151 Phase portraits Focus: nonlinear systems in two dimensions General form of a vector field on the phase plane: Vector notation: Phase portraits Solution x(t) describes
I ve Got a Three-Body Problem
 I ve Got a Three-Body Problem Gareth E. Roberts Department of Mathematics and Computer Science College of the Holy Cross Mathematics Colloquium Fitchburg State College November 13, 2008 Roberts (Holy Cross)
I ve Got a Three-Body Problem Gareth E. Roberts Department of Mathematics and Computer Science College of the Holy Cross Mathematics Colloquium Fitchburg State College November 13, 2008 Roberts (Holy Cross)
Time-Dependent Invariant Manifolds Theory and Computation
 Time-Dependent Invariant Manifolds Theory and Computation Cole Lepine June 1, 2007 Abstract Due to the complex nature of dynamical systems, there are many tools that are used to understand the nature of
Time-Dependent Invariant Manifolds Theory and Computation Cole Lepine June 1, 2007 Abstract Due to the complex nature of dynamical systems, there are many tools that are used to understand the nature of
Design of Low Fuel Trajectory in Interior Realm as a Backup Trajectory for Lunar Exploration
 MITSUBISHI ELECTRIC RESEARCH LABORATORIES http://www.merl.com Design of Low Fuel Trajectory in Interior Realm as a Backup Trajectory for Lunar Exploration Sato, Y.; Grover, P.; Yoshikawa, S. TR0- June
MITSUBISHI ELECTRIC RESEARCH LABORATORIES http://www.merl.com Design of Low Fuel Trajectory in Interior Realm as a Backup Trajectory for Lunar Exploration Sato, Y.; Grover, P.; Yoshikawa, S. TR0- June
Introduction to Applied Nonlinear Dynamical Systems and Chaos
 Stephen Wiggins Introduction to Applied Nonlinear Dynamical Systems and Chaos Second Edition With 250 Figures 4jj Springer I Series Preface v L I Preface to the Second Edition vii Introduction 1 1 Equilibrium
Stephen Wiggins Introduction to Applied Nonlinear Dynamical Systems and Chaos Second Edition With 250 Figures 4jj Springer I Series Preface v L I Preface to the Second Edition vii Introduction 1 1 Equilibrium
Theory and Computation of Non-RRKM Reaction Rates in Chemical Systems with 3 or More D.O.F. Wang Sang Koon Control and Dynamical Systems, Caltech
 Theory and Computation of Non-RRKM Reaction Rates in Chemical Systems with 3 or More D.O.F. Gabern, Koon, Marsden, and Ross Wang Sang Koon Control and Dynamical Systems, Caltech koon@cds.caltech.edu Outline
Theory and Computation of Non-RRKM Reaction Rates in Chemical Systems with 3 or More D.O.F. Gabern, Koon, Marsden, and Ross Wang Sang Koon Control and Dynamical Systems, Caltech koon@cds.caltech.edu Outline
Time frequency analysis of the restricted three-body problem: transport and resonance transitions
 INSTITUTE OF PHYSICS PUBLISHING Class. Quantum Grav. 21 (24) S351 S375 CLASSICAL AND QUANTUM GRAVITY PII: S264-9381(4)7736-4 Time frequency analysis of the restricted three-body problem: transport and
INSTITUTE OF PHYSICS PUBLISHING Class. Quantum Grav. 21 (24) S351 S375 CLASSICAL AND QUANTUM GRAVITY PII: S264-9381(4)7736-4 Time frequency analysis of the restricted three-body problem: transport and
A qualitative analysis of bifurcations to halo orbits
 1/28 spazio A qualitative analysis of bifurcations to halo orbits Dr. Ceccaroni Marta ceccaron@mat.uniroma2.it University of Roma Tor Vergata Work in collaboration with S. Bucciarelli, A. Celletti, G.
1/28 spazio A qualitative analysis of bifurcations to halo orbits Dr. Ceccaroni Marta ceccaron@mat.uniroma2.it University of Roma Tor Vergata Work in collaboration with S. Bucciarelli, A. Celletti, G.
TITAN TRAJECTORY DESIGN USING INVARIANT MANIFOLDS AND RESONANT GRAVITY ASSISTS
 AAS 10-170 TITAN TRAJECTORY DESIGN USING INVARIANT MANIFOLDS AND RESONANT GRAVITY ASSISTS Natasha Bosanac, * Jerrold E. Marsden, Ashley Moore and Stefano Campagnola INTRODUCTION Following the spectacular
AAS 10-170 TITAN TRAJECTORY DESIGN USING INVARIANT MANIFOLDS AND RESONANT GRAVITY ASSISTS Natasha Bosanac, * Jerrold E. Marsden, Ashley Moore and Stefano Campagnola INTRODUCTION Following the spectacular
EE222 - Spring 16 - Lecture 2 Notes 1
 EE222 - Spring 16 - Lecture 2 Notes 1 Murat Arcak January 21 2016 1 Licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International License. Essentially Nonlinear Phenomena Continued
EE222 - Spring 16 - Lecture 2 Notes 1 Murat Arcak January 21 2016 1 Licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International License. Essentially Nonlinear Phenomena Continued
Initial Condition Maps of Subsets of the Circular Restricted Three Body Problem Phase Space
 Noname manuscript No. (will be inserted by the editor) Initial Condition Maps of Subsets of the Circular Restricted Three Body Problem Phase Space L. Hagen A. Utku P. Palmer Received: date / Accepted:
Noname manuscript No. (will be inserted by the editor) Initial Condition Maps of Subsets of the Circular Restricted Three Body Problem Phase Space L. Hagen A. Utku P. Palmer Received: date / Accepted:
B5.6 Nonlinear Systems
 B5.6 Nonlinear Systems 5. Global Bifurcations, Homoclinic chaos, Melnikov s method Alain Goriely 2018 Mathematical Institute, University of Oxford Table of contents 1. Motivation 1.1 The problem 1.2 A
B5.6 Nonlinear Systems 5. Global Bifurcations, Homoclinic chaos, Melnikov s method Alain Goriely 2018 Mathematical Institute, University of Oxford Table of contents 1. Motivation 1.1 The problem 1.2 A
SUN INFLUENCE ON TWO-IMPULSIVE EARTH-TO-MOON TRANSFERS. Sandro da Silva Fernandes. Cleverson Maranhão Porto Marinho
 SUN INFLUENCE ON TWO-IMPULSIVE EARTH-TO-MOON TRANSFERS Sandro da Silva Fernandes Instituto Tecnológico de Aeronáutica, São José dos Campos - 12228-900 - SP-Brazil, (+55) (12) 3947-5953 sandro@ita.br Cleverson
SUN INFLUENCE ON TWO-IMPULSIVE EARTH-TO-MOON TRANSFERS Sandro da Silva Fernandes Instituto Tecnológico de Aeronáutica, São José dos Campos - 12228-900 - SP-Brazil, (+55) (12) 3947-5953 sandro@ita.br Cleverson
Publ. Astron. Obs. Belgrade No. 96 (2017), COMPUTATION OF TRANSIT ORBITS IN THE THREE-BODY-PROBLEM WITH FAST LYAPUNOV INDICATORS
, COMPUTATION OF TRANSIT ORBITS IN THE THREE-BODY-PROBLEM WITH FAST LYAPUNOV INDICATORS") Publ. Astron. Obs. Belgrade No. 96 (017), 71-78 Invited Lecture COMPUTATION OF TRANSIT ORBITS IN THE THREE-BODY-PROBLEM ITH FAST LYAPUNOV INDICATORS M. GUZZO 1 and E. LEGA 1 Università degli Studi di Padova,
Publ. Astron. Obs. Belgrade No. 96 (017), 71-78 Invited Lecture COMPUTATION OF TRANSIT ORBITS IN THE THREE-BODY-PROBLEM ITH FAST LYAPUNOV INDICATORS M. GUZZO 1 and E. LEGA 1 Università degli Studi di Padova,
SPACECRAFT DYNAMICS NEAR A BINARY ASTEROID. F. Gabern, W.S. Koon and J.E. Marsden
 PROCEEDINGS OF THE FIFTH INTERNATIONAL CONFERENCE ON DYNAMICAL SYSTEMS AND DIFFERENTIAL EQUATIONS June 16 19, 2004, Pomona, CA, USA pp. 1 10 SPACECRAFT DYNAMICS NEAR A BINARY ASTEROID F. Gabern, W.S. Koon
PROCEEDINGS OF THE FIFTH INTERNATIONAL CONFERENCE ON DYNAMICAL SYSTEMS AND DIFFERENTIAL EQUATIONS June 16 19, 2004, Pomona, CA, USA pp. 1 10 SPACECRAFT DYNAMICS NEAR A BINARY ASTEROID F. Gabern, W.S. Koon
A plane autonomous system is a pair of simultaneous first-order differential equations,
 Chapter 11 Phase-Plane Techniques 11.1 Plane Autonomous Systems A plane autonomous system is a pair of simultaneous first-order differential equations, ẋ = f(x, y), ẏ = g(x, y). This system has an equilibrium
Chapter 11 Phase-Plane Techniques 11.1 Plane Autonomous Systems A plane autonomous system is a pair of simultaneous first-order differential equations, ẋ = f(x, y), ẏ = g(x, y). This system has an equilibrium
Bifurcations thresholds of halo orbits
 10 th AstroNet-II Final Meeting, 15 th -19 th June 2015, Tossa Del Mar 1/23 spazio Bifurcations thresholds of halo orbits Dr. Ceccaroni Marta ceccaron@mat.uniroma2.it University of Roma Tor Vergata Work
10 th AstroNet-II Final Meeting, 15 th -19 th June 2015, Tossa Del Mar 1/23 spazio Bifurcations thresholds of halo orbits Dr. Ceccaroni Marta ceccaron@mat.uniroma2.it University of Roma Tor Vergata Work
B5.6 Nonlinear Systems
 B5.6 Nonlinear Systems 4. Bifurcations Alain Goriely 2018 Mathematical Institute, University of Oxford Table of contents 1. Local bifurcations for vector fields 1.1 The problem 1.2 The extended centre
B5.6 Nonlinear Systems 4. Bifurcations Alain Goriely 2018 Mathematical Institute, University of Oxford Table of contents 1. Local bifurcations for vector fields 1.1 The problem 1.2 The extended centre
DESIGN OF A MULTI-MOON ORBITER
 AAS 03-143 DESIGN OF A MULTI-MOON ORBITER S.D. Ross, W.S. Koon, M.W. Lo, J.E. Marsden February 7, 2003 Abstract The Multi-Moon Orbiter concept is introduced, wherein a single spacecraft orbits several
AAS 03-143 DESIGN OF A MULTI-MOON ORBITER S.D. Ross, W.S. Koon, M.W. Lo, J.E. Marsden February 7, 2003 Abstract The Multi-Moon Orbiter concept is introduced, wherein a single spacecraft orbits several
Multiple Gravity Assists, Capture, and Escape in the Restricted Three-Body Problem
 SIAM J. APPLIED DYNAMICAL SYSTEMS Vol. 6, No. 3, pp. 576 596 c 2007 Society for Industrial and Applied Mathematics Multiple Gravity Assists, Capture, and Escape in the Restricted Three-Body Problem Shane
SIAM J. APPLIED DYNAMICAL SYSTEMS Vol. 6, No. 3, pp. 576 596 c 2007 Society for Industrial and Applied Mathematics Multiple Gravity Assists, Capture, and Escape in the Restricted Three-Body Problem Shane
14 th AAS/AIAA Space Flight Mechanics Conference
 Paper AAS 04-289 Application of Dynamical Systems Theory to a Very Low Energy Transfer S. D. Ross 1, W. S. Koon 1, M. W. Lo 2, J. E. Marsden 1 1 Control and Dynamical Systems California Institute of Technology
Paper AAS 04-289 Application of Dynamical Systems Theory to a Very Low Energy Transfer S. D. Ross 1, W. S. Koon 1, M. W. Lo 2, J. E. Marsden 1 1 Control and Dynamical Systems California Institute of Technology
1 The pendulum equation
 Math 270 Honors ODE I Fall, 2008 Class notes # 5 A longer than usual homework assignment is at the end. The pendulum equation We now come to a particularly important example, the equation for an oscillating
Math 270 Honors ODE I Fall, 2008 Class notes # 5 A longer than usual homework assignment is at the end. The pendulum equation We now come to a particularly important example, the equation for an oscillating
Earth-to-Moon Low Energy Transfers Targeting L 1 Hyperbolic Transit Orbits
 Earth-to-Moon Low Energy Transfers Targeting L 1 Hyperbolic Transit Orbits Francesco Topputo Massimiliano Vasile Franco Bernelli-Zazzera Aerospace Engineering Department, Politecnico di Milano Via La Masa,
Earth-to-Moon Low Energy Transfers Targeting L 1 Hyperbolic Transit Orbits Francesco Topputo Massimiliano Vasile Franco Bernelli-Zazzera Aerospace Engineering Department, Politecnico di Milano Via La Masa,
OPTIMIZATION OF SPACECRAFT TRAJECTORIES: A METHOD COMBINING INVARIANT MANIFOLD TECHNIQUES AND DISCRETE MECHANICS AND OPTIMAL CONTROL
 (Preprint) AAS 09-257 OPTIMIZATION OF SPACECRAFT TRAJECTORIES: A METHOD COMBINING INVARIANT MANIFOLD TECHNIQUES AND DISCRETE MECHANICS AND OPTIMAL CONTROL Ashley Moore, Sina Ober-Blöbaum, and Jerrold E.
(Preprint) AAS 09-257 OPTIMIZATION OF SPACECRAFT TRAJECTORIES: A METHOD COMBINING INVARIANT MANIFOLD TECHNIQUES AND DISCRETE MECHANICS AND OPTIMAL CONTROL Ashley Moore, Sina Ober-Blöbaum, and Jerrold E.
What is the InterPlanetary Superhighway?
 What is the InterPlanetary Superhighway? Kathleen Howell Purdue University Lo and Ross Trajectory Key Space Technology Mission-Enabling Technology Not All Technology is hardware! The InterPlanetary Superhighway
What is the InterPlanetary Superhighway? Kathleen Howell Purdue University Lo and Ross Trajectory Key Space Technology Mission-Enabling Technology Not All Technology is hardware! The InterPlanetary Superhighway
The Higgins-Selkov oscillator
 The Higgins-Selkov oscillator May 14, 2014 Here I analyse the long-time behaviour of the Higgins-Selkov oscillator. The system is ẋ = k 0 k 1 xy 2, (1 ẏ = k 1 xy 2 k 2 y. (2 The unknowns x and y, being
The Higgins-Selkov oscillator May 14, 2014 Here I analyse the long-time behaviour of the Higgins-Selkov oscillator. The system is ẋ = k 0 k 1 xy 2, (1 ẏ = k 1 xy 2 k 2 y. (2 The unknowns x and y, being
The Three Body Problem
 The Three Body Problem Joakim Hirvonen Grützelius Karlstad University December 26, 2004 Department of Engineeringsciences, Physics and Mathematics 5p Examinator: Prof Jürgen Füchs Abstract The main topic
The Three Body Problem Joakim Hirvonen Grützelius Karlstad University December 26, 2004 Department of Engineeringsciences, Physics and Mathematics 5p Examinator: Prof Jürgen Füchs Abstract The main topic
2.10 Saddles, Nodes, Foci and Centers
 2.10 Saddles, Nodes, Foci and Centers In Section 1.5, a linear system (1 where x R 2 was said to have a saddle, node, focus or center at the origin if its phase portrait was linearly equivalent to one
2.10 Saddles, Nodes, Foci and Centers In Section 1.5, a linear system (1 where x R 2 was said to have a saddle, node, focus or center at the origin if its phase portrait was linearly equivalent to one
STABILITY OF ORBITS NEAR LARGE MASS RATIO BINARY SYSTEMS
 IAA-AAS-DyCoSS2-05-08 STABILITY OF ORBITS NEAR LARGE MASS RATIO BINARY SYSTEMS Natasha Bosanac, Kathleen C. Howell and Ephraim Fischbach INTRODUCTION With recent scientific interest into the composition,
IAA-AAS-DyCoSS2-05-08 STABILITY OF ORBITS NEAR LARGE MASS RATIO BINARY SYSTEMS Natasha Bosanac, Kathleen C. Howell and Ephraim Fischbach INTRODUCTION With recent scientific interest into the composition,
MULTIPLE GRAVITY ASSISTS IN THE RESTRICTED THREE-BODY PROBLEM
 AAS 07-227 MULTIPLE GRAVITY ASSISTS IN THE RESTRICTED THREE-BODY PROBLEM Shane D. Ross and Daniel J. Scheeres Abstract For low energy spacecraft trajectories such as multi-moon orbiters for the Jupiter
AAS 07-227 MULTIPLE GRAVITY ASSISTS IN THE RESTRICTED THREE-BODY PROBLEM Shane D. Ross and Daniel J. Scheeres Abstract For low energy spacecraft trajectories such as multi-moon orbiters for the Jupiter
Nonlinear Dynamic Systems Homework 1
 Nonlinear Dynamic Systems Homework 1 1. A particle of mass m is constrained to travel along the path shown in Figure 1, which is described by the following function yx = 5x + 1x 4, 1 where x is defined
Nonlinear Dynamic Systems Homework 1 1. A particle of mass m is constrained to travel along the path shown in Figure 1, which is described by the following function yx = 5x + 1x 4, 1 where x is defined
Nonlinear Oscillators: Free Response
 20 Nonlinear Oscillators: Free Response Tools Used in Lab 20 Pendulums To the Instructor: This lab is just an introduction to the nonlinear phase portraits, but the connection between phase portraits and
20 Nonlinear Oscillators: Free Response Tools Used in Lab 20 Pendulums To the Instructor: This lab is just an introduction to the nonlinear phase portraits, but the connection between phase portraits and
Lecture 8 Phase Space, Part 2. 1 Surfaces of section. MATH-GA Mechanics
 Lecture 8 Phase Space, Part 2 MATH-GA 2710.001 Mechanics 1 Surfaces of section Thus far, we have highlighted the value of phase portraits, and seen that valuable information can be extracted by looking
Lecture 8 Phase Space, Part 2 MATH-GA 2710.001 Mechanics 1 Surfaces of section Thus far, we have highlighted the value of phase portraits, and seen that valuable information can be extracted by looking
THE ROLE OF INVARIANT MANIFOLDS IN LOW THRUST TRAJECTORY DESIGN
 AAS 4-288 THE ROLE OF INVARIANT MANIFOLDS IN LOW THRUST TRAJECTORY DESIGN Martin W. Lo *, Rodney L. Anderson, Gregory Whiffen *, Larry Romans * INTRODUCTION An initial study of techniques to be used in
AAS 4-288 THE ROLE OF INVARIANT MANIFOLDS IN LOW THRUST TRAJECTORY DESIGN Martin W. Lo *, Rodney L. Anderson, Gregory Whiffen *, Larry Romans * INTRODUCTION An initial study of techniques to be used in
Part II. Dynamical Systems. Year
 Part II Year 2017 2016 2015 2014 2013 2012 2011 2010 2009 2008 2007 2006 2005 2017 34 Paper 1, Section II 30A Consider the dynamical system where β > 1 is a constant. ẋ = x + x 3 + βxy 2, ẏ = y + βx 2
Part II Year 2017 2016 2015 2014 2013 2012 2011 2010 2009 2008 2007 2006 2005 2017 34 Paper 1, Section II 30A Consider the dynamical system where β > 1 is a constant. ẋ = x + x 3 + βxy 2, ẏ = y + βx 2
NBA Lecture 1. Simplest bifurcations in n-dimensional ODEs. Yu.A. Kuznetsov (Utrecht University, NL) March 14, 2011
 March 14, 2011") NBA Lecture 1 Simplest bifurcations in n-dimensional ODEs Yu.A. Kuznetsov (Utrecht University, NL) March 14, 2011 Contents 1. Solutions and orbits: equilibria cycles connecting orbits other invariant sets
NBA Lecture 1 Simplest bifurcations in n-dimensional ODEs Yu.A. Kuznetsov (Utrecht University, NL) March 14, 2011 Contents 1. Solutions and orbits: equilibria cycles connecting orbits other invariant sets
Fuel-efficient navigation in complex flows
 2008 American Control Conference Westin Seattle Hotel, Seattle, Washington, USA June 11-13, 2008 WeB16.5 Fuel-efficient navigation in complex flows Carmine Senatore and Shane D. Ross Abstract In realistic
2008 American Control Conference Westin Seattle Hotel, Seattle, Washington, USA June 11-13, 2008 WeB16.5 Fuel-efficient navigation in complex flows Carmine Senatore and Shane D. Ross Abstract In realistic
11 Chaos in Continuous Dynamical Systems.
 11 CHAOS IN CONTINUOUS DYNAMICAL SYSTEMS. 47 11 Chaos in Continuous Dynamical Systems. Let s consider a system of differential equations given by where x(t) : R R and f : R R. ẋ = f(x), The linearization
11 CHAOS IN CONTINUOUS DYNAMICAL SYSTEMS. 47 11 Chaos in Continuous Dynamical Systems. Let s consider a system of differential equations given by where x(t) : R R and f : R R. ẋ = f(x), The linearization
STABILITY. Phase portraits and local stability
 MAS271 Methods for differential equations Dr. R. Jain STABILITY Phase portraits and local stability We are interested in system of ordinary differential equations of the form ẋ = f(x, y), ẏ = g(x, y),
MAS271 Methods for differential equations Dr. R. Jain STABILITY Phase portraits and local stability We are interested in system of ordinary differential equations of the form ẋ = f(x, y), ẏ = g(x, y),
Phys 7221, Fall 2006: Midterm exam
 Phys 7221, Fall 2006: Midterm exam October 20, 2006 Problem 1 (40 pts) Consider a spherical pendulum, a mass m attached to a rod of length l, as a constrained system with r = l, as shown in the figure.
Phys 7221, Fall 2006: Midterm exam October 20, 2006 Problem 1 (40 pts) Consider a spherical pendulum, a mass m attached to a rod of length l, as a constrained system with r = l, as shown in the figure.
Geometric Mechanics and the Dynamics of Asteroid Pairs
 Geometric Mechanics and the Dynamics of Asteroid Pairs WANG-SANG KOON, a JERROLD E. MARSDEN, a SHANE D. ROSS, a MARTIN LO, b AND DANIEL J. SCHEERES c a Control and Dynamical Systems, Caltech, Pasadena,
Geometric Mechanics and the Dynamics of Asteroid Pairs WANG-SANG KOON, a JERROLD E. MARSDEN, a SHANE D. ROSS, a MARTIN LO, b AND DANIEL J. SCHEERES c a Control and Dynamical Systems, Caltech, Pasadena,
Physical Dynamics (SPA5304) Lecture Plan 2018
 Lecture Plan 2018") Physical Dynamics (SPA5304) Lecture Plan 2018 The numbers on the left margin are approximate lecture numbers. Items in gray are not covered this year 1 Advanced Review of Newtonian Mechanics 1.1 One Particle
Physical Dynamics (SPA5304) Lecture Plan 2018 The numbers on the left margin are approximate lecture numbers. Items in gray are not covered this year 1 Advanced Review of Newtonian Mechanics 1.1 One Particle
A map approximation for the restricted three-body problem
 A map approximation for the restricted three-body problem Shane Ross Engineering Science and Mechanics, Virginia Tech www.esm.vt.edu/ sdross Collaborators: P. Grover (Virginia Tech) & D. J. Scheeres (U
A map approximation for the restricted three-body problem Shane Ross Engineering Science and Mechanics, Virginia Tech www.esm.vt.edu/ sdross Collaborators: P. Grover (Virginia Tech) & D. J. Scheeres (U
Celestial Mechanics Notes Set 5: Symmetric Periodic Orbits of the Circular Restricted Three Body Problem and their Stable and Unstable Manifolds
 Celestial Mechanics Notes Set 5: Symmetric Periodic Orbits of the Circular Restricted Three Body Problem and their Stable and Unstable Manifolds J.D. Mireles James December 22, 26 Contents 1 Introduction:
Celestial Mechanics Notes Set 5: Symmetric Periodic Orbits of the Circular Restricted Three Body Problem and their Stable and Unstable Manifolds J.D. Mireles James December 22, 26 Contents 1 Introduction:
BIFURCATION PHENOMENA Lecture 4: Bifurcations in n-dimensional ODEs
 BIFURCATION PHENOMENA Lecture 4: Bifurcations in n-dimensional ODEs Yuri A. Kuznetsov August, 2010 Contents 1. Solutions and orbits: equilibria cycles connecting orbits compact invariant manifolds strange
BIFURCATION PHENOMENA Lecture 4: Bifurcations in n-dimensional ODEs Yuri A. Kuznetsov August, 2010 Contents 1. Solutions and orbits: equilibria cycles connecting orbits compact invariant manifolds strange
Earth-to-Moon Low Energy Transfers Targeting L 1 Hyperbolic Transit Orbits
 Earth-to-Moon Low Energy Transfers Targeting L 1 Hyperbolic Transit Orbits FRANCESCO TOPPUTO, MASSIMILIANO VASILE, AND FRANCO BERNELLI-ZAZZERA Aerospace Engineering Department, Politecnico di Milano, Milan,
Earth-to-Moon Low Energy Transfers Targeting L 1 Hyperbolic Transit Orbits FRANCESCO TOPPUTO, MASSIMILIANO VASILE, AND FRANCO BERNELLI-ZAZZERA Aerospace Engineering Department, Politecnico di Milano, Milan,
Lecture 5: Oscillatory motions for the RPE3BP
 Lecture 5: Oscillatory motions for the RPE3BP Marcel Guardia Universitat Politècnica de Catalunya February 10, 2017 M. Guardia (UPC) Lecture 5 February 10, 2017 1 / 25 Outline Oscillatory motions for the
Lecture 5: Oscillatory motions for the RPE3BP Marcel Guardia Universitat Politècnica de Catalunya February 10, 2017 M. Guardia (UPC) Lecture 5 February 10, 2017 1 / 25 Outline Oscillatory motions for the
Solutions for B8b (Nonlinear Systems) Fake Past Exam (TT 10)
 Fake Past Exam (TT 10)") Solutions for B8b (Nonlinear Systems) Fake Past Exam (TT 10) Mason A. Porter 15/05/2010 1 Question 1 i. (6 points) Define a saddle-node bifurcation and show that the first order system dx dt = r x e x
Solutions for B8b (Nonlinear Systems) Fake Past Exam (TT 10) Mason A. Porter 15/05/2010 1 Question 1 i. (6 points) Define a saddle-node bifurcation and show that the first order system dx dt = r x e x
Math 4200, Problem set 3
 Math, Problem set 3 Solutions September, 13 Problem 1. ẍ = ω x. Solution. Following the general theory of conservative systems with one degree of freedom let us define the kinetic energy T and potential
Math, Problem set 3 Solutions September, 13 Problem 1. ẍ = ω x. Solution. Following the general theory of conservative systems with one degree of freedom let us define the kinetic energy T and potential
Expanding opportunities for lunar gravity capture
 Expanding opportunities for lunar gravity capture Keita Tanaka 1, Mutsuko Morimoto 2, Michihiro Matsumoto 1, Junichiro Kawaguchi 3, 1 The University of Tokyo, Japan, 2 JSPEC/JAXA, Japan, 3 ISAS/JAXA, Japan,
Expanding opportunities for lunar gravity capture Keita Tanaka 1, Mutsuko Morimoto 2, Michihiro Matsumoto 1, Junichiro Kawaguchi 3, 1 The University of Tokyo, Japan, 2 JSPEC/JAXA, Japan, 3 ISAS/JAXA, Japan,
MATH 415, WEEKS 7 & 8: Conservative and Hamiltonian Systems, Non-linear Pendulum
 MATH 415, WEEKS 7 & 8: Conservative and Hamiltonian Systems, Non-linear Pendulum Reconsider the following example from last week: dx dt = x y dy dt = x2 y. We were able to determine many qualitative features
MATH 415, WEEKS 7 & 8: Conservative and Hamiltonian Systems, Non-linear Pendulum Reconsider the following example from last week: dx dt = x y dy dt = x2 y. We were able to determine many qualitative features
Physics 106a, Caltech 4 December, Lecture 18: Examples on Rigid Body Dynamics. Rotating rectangle. Heavy symmetric top
 Physics 106a, Caltech 4 December, 2018 Lecture 18: Examples on Rigid Body Dynamics I go through a number of examples illustrating the methods of solving rigid body dynamics. In most cases, the problem
Physics 106a, Caltech 4 December, 2018 Lecture 18: Examples on Rigid Body Dynamics I go through a number of examples illustrating the methods of solving rigid body dynamics. In most cases, the problem
INVARIANT MANIFOLDS, THE SPATIAL THREE-BODY PROBLEM AND SPACE MISSION DESIGN
 AAS -3 INVARIANT MANIFOLDS, THE SPATIAL THREE-BODY PROBLEM AND SPACE MISSION DESIGN G. Gómez,W.S.Koon,M.W.Lo, J.E. Marsden,J.Masdemont, and S.D. Ross August 2 The invariant manifold structures of the collinear
AAS -3 INVARIANT MANIFOLDS, THE SPATIAL THREE-BODY PROBLEM AND SPACE MISSION DESIGN G. Gómez,W.S.Koon,M.W.Lo, J.E. Marsden,J.Masdemont, and S.D. Ross August 2 The invariant manifold structures of the collinear
Escape Trajectories from Sun Earth Distant Retrograde Orbits
 Trans. JSASS Aerospace Tech. Japan Vol. 4, No. ists30, pp. Pd_67-Pd_75, 06 Escape Trajectories from Sun Earth Distant Retrograde Orbits By Yusue OKI ) and Junichiro KAWAGUCHI ) ) Department of Aeronautics
Trans. JSASS Aerospace Tech. Japan Vol. 4, No. ists30, pp. Pd_67-Pd_75, 06 Escape Trajectories from Sun Earth Distant Retrograde Orbits By Yusue OKI ) and Junichiro KAWAGUCHI ) ) Department of Aeronautics
Massachusetts Institute of Technology Department of Physics. Final Examination December 17, 2004
 Massachusetts Institute of Technology Department of Physics Course: 8.09 Classical Mechanics Term: Fall 004 Final Examination December 17, 004 Instructions Do not start until you are told to do so. Solve
Massachusetts Institute of Technology Department of Physics Course: 8.09 Classical Mechanics Term: Fall 004 Final Examination December 17, 004 Instructions Do not start until you are told to do so. Solve
THE THREE-BODY PROBLEM
 STUDIES IN ASTRONAUTICS 4 THE THREE-BODY PROBLEM CHRISTIAN MARCH AL Office National d'etudes et de RecherchesAerospatiales, Chätillon, France Amsterdam - Oxford - New York -Tokyo 1990 X CONTENTS Foreword
STUDIES IN ASTRONAUTICS 4 THE THREE-BODY PROBLEM CHRISTIAN MARCH AL Office National d'etudes et de RecherchesAerospatiales, Chätillon, France Amsterdam - Oxford - New York -Tokyo 1990 X CONTENTS Foreword