ME751 Advanced Computational Multibody Dynamics
|
|
|
- Benjamin Dixon
- 5 years ago
- Views:
Transcription
1 ME751 Advanced Computational Multibody Dynamics October 7, 2016 Dan Negrut University of Wisconsin-Madison
2 Quotes of the Day [from Samuel] There will come a time when you believe everything is finished. That will be the beginning. -- Louis L Amour, author Be yourself, everybody else is already taken. -- Oscar Wilde An approximate answer to the right problem is worth a good deal more than the exact answer to an approximate problem -- J. Tukey, statistician If we did all the things we are capable of, we would literally astound ourselves. -- Thomas A. Edison Nobody makes a greater mistake than he who did nothing because he could only do a little. -- Edmund Burke, British statesman and orator 2
3 Before we get started Last Time: Accounting for the presence of reaction forces in the expression of the virtual work Obtaining the EOM for a 3D system: the r-p formulation Today: Loose ends, the formulation of the EOM Super briefly talk about the EOM when using Euler Angles Discuss TSDAs and RSDAs Simple example of deriving the EOM for a one body system Inverse Dynamics Analysis Equilibrium Analysis Homework Assigned today, due on October 14. Will get you started on the simengine3d Reading: Ed Haug s textbook,11.3 and






4 Comment: on the Matrix-Free and Matrix-Form of the EOM 4
5 The r-p Formulation of the EOM: Providing Initial Conditions 5
6 The r-p Formulation of the EOM: The RHS of the Acceleration Kin. Constr. Eq. 6
7 The r-p Formulation of the EOM: Getting the RHS of the Acceleration Equation 7
8 The r-p Formulation of the EOM: Getting the RHS of the Acceleration Equation 8
9 Comments on getting the EOM using Euler Angles 9
10 Recall What Done to Get [1/3] EOM 10
11 The Formulation of the EOM Using Euler Angles [2/3] 11
12 The Formulation of the EOM Using Euler Angles [3/3] 12


13 One slide overview EOM in and and 13
14 Dynamics in the Absence of Constraints 14


15 Comments, Not Wanting to Deal W/ Constraints 15
16 Discussion on Applied Forces and Torques 16



17 Virtual Work: Contribution of concentrated forces/torques 17
18 Concentrated Forces: TSDA (Translational Spring-Damper-Actuator) pp.445 Setup: You have a translational spring-damper-actuator acting between point P i on body i, and P j on body j Translational spring, stiffness k Zero stress length (given): 0 Translational damper, coefficient Actuator (hydraulic, electric, etc.) symbol used 18

19 Concentrated Forces: TSDA 19
20 Concentrated Forces: TSDA 20
21 Concentrated Forces: TSDA 21
22 Concentrated Torques: RSDA (Rotational Spring-Damper-Actuator) pp.448 Setup: You have a rotational spring-damper-actuator acting between two lines, each line rigidly attached to one of the bodies (dashed lines in figure) Rotational spring, stiffness Rotational damper, coefficient Actuator (hydraulic, electric, etc.) symbol used 22
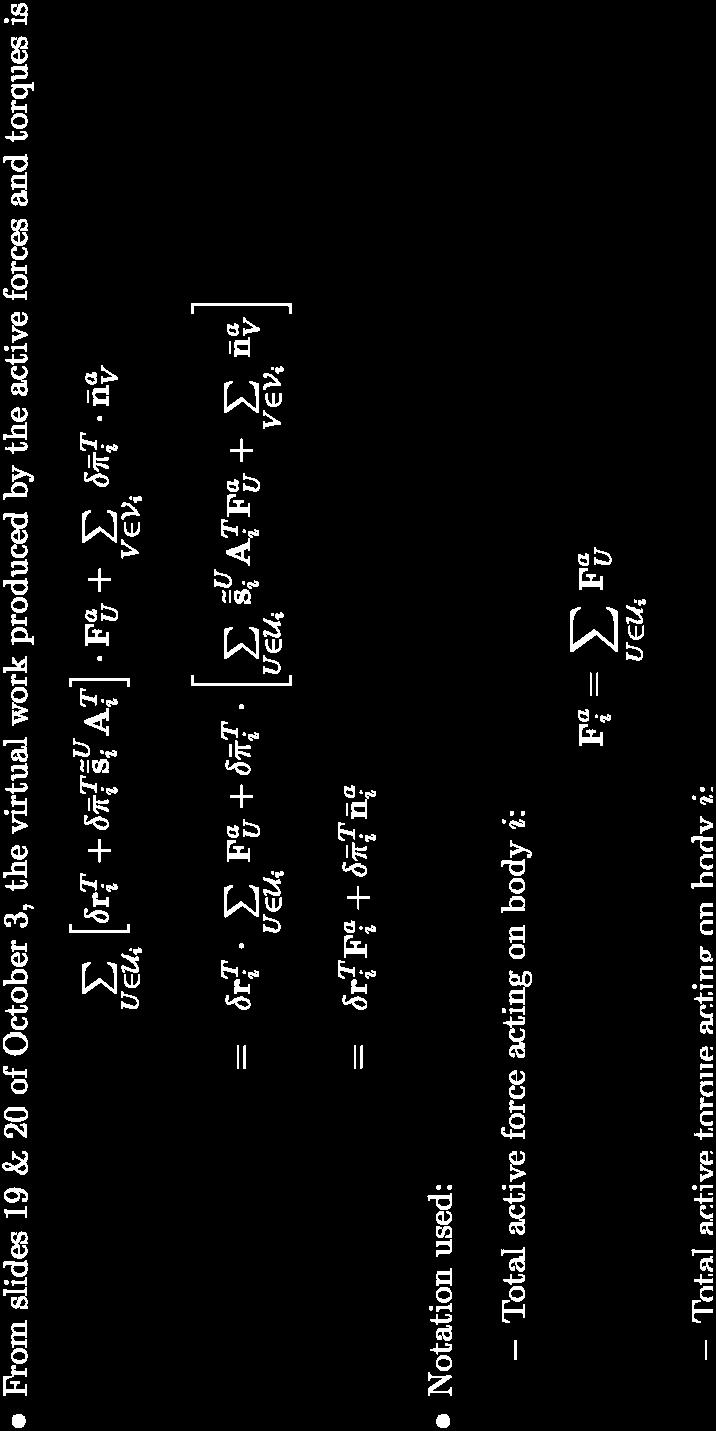
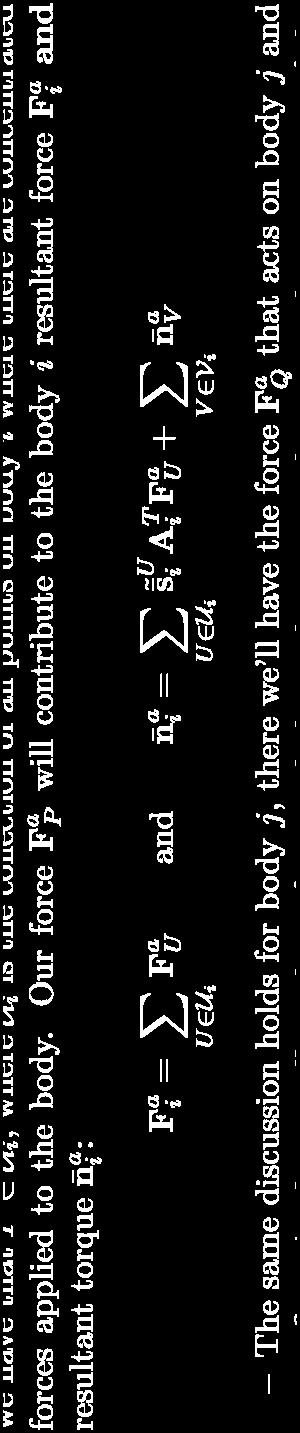
23 Virtual Work: Contribution of the active forces/torques 23
24 Concentrated Torques: RSDA 24
25 Concentrated Torques: RSDA 25
26 [AO] Example: EOM for a Dangling Cube See handout, available also online Units are all SI Cube of mass 6, length of edge is 2 Hanging from a corner at point P A force applied at opposite corner, at point Q Moving under gravity What s the work order? Formulate the EOM using the formulation Get the linear system whose solution provides accelerations and Lagr. multiplier 26
ME751 Advanced Computational Multibody Dynamics
 ME751 Advanced Computational Multibody Dynamics Inverse Dynamics Equilibrium Analysis Various Odd Ends March 18, 2010 Dan Negrut, 2010 ME751, UW-Madison Action speaks louder than words but not nearly as
ME751 Advanced Computational Multibody Dynamics Inverse Dynamics Equilibrium Analysis Various Odd Ends March 18, 2010 Dan Negrut, 2010 ME751, UW-Madison Action speaks louder than words but not nearly as
ME451 Kinematics and Dynamics of Machine Systems
 ME451 Kinematics and Dynamics of Machine Systems Introduction to Dynamics 6.1 October 30, 2014 Dan Negrut ME451, Fall 2014 University of Wisconsin-Madison Quote of the day: Computer science education cannot
ME451 Kinematics and Dynamics of Machine Systems Introduction to Dynamics 6.1 October 30, 2014 Dan Negrut ME451, Fall 2014 University of Wisconsin-Madison Quote of the day: Computer science education cannot
ME451 Kinematics and Dynamics of Machine Systems
 ME451 Kinematics and Dynamics of Machine Systems Introduction to Dynamics 6.3.4, 6.6 November 25, 2014 Dan Negrut ME451, Fall 2014 University of Wisconsin-Madison Quote of the day: Marge, don't discourage
ME451 Kinematics and Dynamics of Machine Systems Introduction to Dynamics 6.3.4, 6.6 November 25, 2014 Dan Negrut ME451, Fall 2014 University of Wisconsin-Madison Quote of the day: Marge, don't discourage
ME451 Kinematics and Dynamics of Machine Systems
 ME451 Kinematics and Dynamics of Machine Systems Introduction to Dynamics 6.1 November 6, 2014 Dan Negrut ME451, Fall 2014 University of Wisconsin-Madison Quote of the day: I have never let my schooling
ME451 Kinematics and Dynamics of Machine Systems Introduction to Dynamics 6.1 November 6, 2014 Dan Negrut ME451, Fall 2014 University of Wisconsin-Madison Quote of the day: I have never let my schooling
ME751 Advanced Computational Multibody Dynamics. September 14, 2016
 ME751 Advanced Computational Multibody Dynamics September 14, 2016 Quote of the Day My own business always bores me to death; I prefer other people's. -- Oscar Wilde 2 Looking Ahead, Friday Need to wrap
ME751 Advanced Computational Multibody Dynamics September 14, 2016 Quote of the Day My own business always bores me to death; I prefer other people's. -- Oscar Wilde 2 Looking Ahead, Friday Need to wrap
ME451 Kinematics and Dynamics of Machine Systems
 ME451 Kinematics and Dynamics of Machine Systems Introduction to Dynamics 6.1 November 11, 2014 Dan Negrut ME451, Fall 2014 University of Wisconsin-Madison Quote of the day: Noise makes little good; good
ME451 Kinematics and Dynamics of Machine Systems Introduction to Dynamics 6.1 November 11, 2014 Dan Negrut ME451, Fall 2014 University of Wisconsin-Madison Quote of the day: Noise makes little good; good
General Theoretical Concepts Related to Multibody Dynamics
 General Theoretical Concepts Related to Multibody Dynamics Before Getting Started Material draws on two main sources Ed Haug s book, available online: http://sbel.wisc.edu/courses/me751/2010/bookhaugpointers.htm
General Theoretical Concepts Related to Multibody Dynamics Before Getting Started Material draws on two main sources Ed Haug s book, available online: http://sbel.wisc.edu/courses/me751/2010/bookhaugpointers.htm
ME451 Kinematics and Dynamics of Machine Systems
 ME451 Kinematics and Dynamics of Machine Systems Introduction to Dynamics Newmark Integration Formula [not in the textbook] December 9, 2014 Dan Negrut ME451, Fall 2014 University of Wisconsin-Madison
ME451 Kinematics and Dynamics of Machine Systems Introduction to Dynamics Newmark Integration Formula [not in the textbook] December 9, 2014 Dan Negrut ME451, Fall 2014 University of Wisconsin-Madison
ME451 Kinematics and Dynamics of Machine Systems
 ME451 Kinematics and Dynamics of Machine Systems Introduction September 4, 2014 Dan Negrut University of Wisconsin-Madison Quote of the day: "History will be kind to me for I intend to write it -Winston
ME451 Kinematics and Dynamics of Machine Systems Introduction September 4, 2014 Dan Negrut University of Wisconsin-Madison Quote of the day: "History will be kind to me for I intend to write it -Winston
ME751 Advanced Computational Multibody Dynamics
 ME751 Advanced Computational Multibody Dynamics Section 9.2 September 16, 2016 Dan Negrut University of Wisconsin-Madison Quote of the day I only believe in statistics that I doctored myself. -- Sir Winston
ME751 Advanced Computational Multibody Dynamics Section 9.2 September 16, 2016 Dan Negrut University of Wisconsin-Madison Quote of the day I only believe in statistics that I doctored myself. -- Sir Winston
AN INTRODUCTION TO LAGRANGE EQUATIONS. Professor J. Kim Vandiver October 28, 2016
 AN INTRODUCTION TO LAGRANGE EQUATIONS Professor J. Kim Vandiver October 28, 2016 kimv@mit.edu 1.0 INTRODUCTION This paper is intended as a minimal introduction to the application of Lagrange equations
AN INTRODUCTION TO LAGRANGE EQUATIONS Professor J. Kim Vandiver October 28, 2016 kimv@mit.edu 1.0 INTRODUCTION This paper is intended as a minimal introduction to the application of Lagrange equations
General Physics I, Spring Vectors
 General Physics I, Spring 2011 Vectors 1 Vectors: Introduction A vector quantity in physics is one that has a magnitude (absolute value) and a direction. We have seen three already: displacement, velocity,
General Physics I, Spring 2011 Vectors 1 Vectors: Introduction A vector quantity in physics is one that has a magnitude (absolute value) and a direction. We have seen three already: displacement, velocity,
Theory & Practice of Rotor Dynamics Prof. Rajiv Tiwari Department of Mechanical Engineering Indian Institute of Technology Guwahati
 Theory & Practice of Rotor Dynamics Prof. Rajiv Tiwari Department of Mechanical Engineering Indian Institute of Technology Guwahati Module - 5 Torsional Vibrations Lecture - 4 Transfer Matrix Approach
Theory & Practice of Rotor Dynamics Prof. Rajiv Tiwari Department of Mechanical Engineering Indian Institute of Technology Guwahati Module - 5 Torsional Vibrations Lecture - 4 Transfer Matrix Approach
Read textbook CHAPTER 1.4, Apps B&D
 Lecture 2 Read textbook CHAPTER 1.4, Apps B&D Today: Derive EOMs & Linearization undamental equation of motion for mass-springdamper system (1DO). Linear and nonlinear system. Examples of derivation of
Lecture 2 Read textbook CHAPTER 1.4, Apps B&D Today: Derive EOMs & Linearization undamental equation of motion for mass-springdamper system (1DO). Linear and nonlinear system. Examples of derivation of
ME751 Advanced Computational Multibody Dynamics
 ME751 Advanced Computational Multibody Dynamics Review: Elements of Linear Algebra & Calculus September 9, 2016 Dan Negrut University of Wisconsin-Madison Quote of the day If you can't convince them, confuse
ME751 Advanced Computational Multibody Dynamics Review: Elements of Linear Algebra & Calculus September 9, 2016 Dan Negrut University of Wisconsin-Madison Quote of the day If you can't convince them, confuse
The Spring-Mass Oscillator
 The Spring-Mass Oscillator Goals and Introduction In this experiment, we will examine and quantify the behavior of the spring-mass oscillator. The spring-mass oscillator consists of an object that is free
The Spring-Mass Oscillator Goals and Introduction In this experiment, we will examine and quantify the behavior of the spring-mass oscillator. The spring-mass oscillator consists of an object that is free
Motion in Two Dimensions Teacher s Guide
 Motion in Two Dimensions Teacher s Guide Objectives: 1. Use kinematic equations for motion in two dimensions to determine the range of a projectile.. Use the equation for torque to determine at what point
Motion in Two Dimensions Teacher s Guide Objectives: 1. Use kinematic equations for motion in two dimensions to determine the range of a projectile.. Use the equation for torque to determine at what point
Physical Simulation. October 19, 2005
 Physical Simulation October 19, 2005 Objects So now that we have objects, lets make them behave like real objects Want to simulate properties of matter Physical properties (dynamics, kinematics) [today
Physical Simulation October 19, 2005 Objects So now that we have objects, lets make them behave like real objects Want to simulate properties of matter Physical properties (dynamics, kinematics) [today
Structural Dynamics Prof. P. Banerji Department of Civil Engineering Indian Institute of Technology, Bombay. Lecture - 1 Introduction
 Structural Dynamics Prof. P. Banerji Department of Civil Engineering Indian Institute of Technology, Bombay Lecture - 1 Introduction Hello, I am Pradipta Banerji from the department of civil engineering,
Structural Dynamics Prof. P. Banerji Department of Civil Engineering Indian Institute of Technology, Bombay Lecture - 1 Introduction Hello, I am Pradipta Banerji from the department of civil engineering,
Module 4: Dynamic Vibration Absorbers and Vibration Isolator Lecture 19: Active DVA. The Lecture Contains: Development of an Active DVA
 The Lecture Contains: Development of an Active DVA Proof Mass Actutor Application of Active DVA file:///d /chitra/vibration_upload/lecture19/19_1.htm[6/25/2012 12:35:51 PM] In this section, we will consider
The Lecture Contains: Development of an Active DVA Proof Mass Actutor Application of Active DVA file:///d /chitra/vibration_upload/lecture19/19_1.htm[6/25/2012 12:35:51 PM] In this section, we will consider
7. FORCE ANALYSIS. Fundamentals F C
 ME 352 ORE NLYSIS 7. ORE NLYSIS his chapter discusses some of the methodologies used to perform force analysis on mechanisms. he chapter begins with a review of some fundamentals of force analysis using
ME 352 ORE NLYSIS 7. ORE NLYSIS his chapter discusses some of the methodologies used to perform force analysis on mechanisms. he chapter begins with a review of some fundamentals of force analysis using
Structures Activity 2 Levers
 Structures Activity 2 Levers Object: The objects of this activity are to explore the concepts of torque and rotational equilibrium, study the three classes of lever, and apply the concepts of torque and
Structures Activity 2 Levers Object: The objects of this activity are to explore the concepts of torque and rotational equilibrium, study the three classes of lever, and apply the concepts of torque and
Do you know how to find the distance between two points?
 Some notation to understand: is the line through points A and B is the ray starting at point A and extending (infinitely) through B is the line segment connecting points A and B is the length of the line
Some notation to understand: is the line through points A and B is the ray starting at point A and extending (infinitely) through B is the line segment connecting points A and B is the length of the line
Torque/Rotational Energy Mock Exam. Instructions: (105 points) Answer the following questions. SHOW ALL OF YOUR WORK.
 Answer the following questions. SHOW ALL OF YOUR WORK.") AP Physics C Spring, 2017 Torque/Rotational Energy Mock Exam Name: Answer Key Mr. Leonard Instructions: (105 points) Answer the following questions. SHOW ALL OF YOUR WORK. (22 pts ) 1. Two masses are attached
AP Physics C Spring, 2017 Torque/Rotational Energy Mock Exam Name: Answer Key Mr. Leonard Instructions: (105 points) Answer the following questions. SHOW ALL OF YOUR WORK. (22 pts ) 1. Two masses are attached
Introduction to Algebra: The First Week
 Introduction to Algebra: The First Week Background: According to the thermostat on the wall, the temperature in the classroom right now is 72 degrees Fahrenheit. I want to write to my friend in Europe,
Introduction to Algebra: The First Week Background: According to the thermostat on the wall, the temperature in the classroom right now is 72 degrees Fahrenheit. I want to write to my friend in Europe,
(Refer Slide Time 1:33)
") Mechanical Measurements and Metrology Prof. S. P. Venkateshan Department of Mechanical Engineering Indian Institute of Technology, Madras Module - 4 Lecture - 45 Measurement of Force This will be lecture
Mechanical Measurements and Metrology Prof. S. P. Venkateshan Department of Mechanical Engineering Indian Institute of Technology, Madras Module - 4 Lecture - 45 Measurement of Force This will be lecture
States of matter. Density high > high >> low (pressure dependent)
") Fluids States of matter Solids Fluids crystalline amorphous liquids gasses Inter-atomic forces strong > strong >> very weak Density high > high >> low (pressure dependent) Density is an important material
Fluids States of matter Solids Fluids crystalline amorphous liquids gasses Inter-atomic forces strong > strong >> very weak Density high > high >> low (pressure dependent) Density is an important material
Multibody simulation
 Multibody simulation Dynamics of a multibody system (Newton-Euler formulation) Dimitar Dimitrov Örebro University June 8, 2012 Main points covered Newton-Euler formulation forward dynamics inverse dynamics
Multibody simulation Dynamics of a multibody system (Newton-Euler formulation) Dimitar Dimitrov Örebro University June 8, 2012 Main points covered Newton-Euler formulation forward dynamics inverse dynamics
Physics Mechanics. Lecture 11 Newton s Laws - part 2
 Physics 170 - Mechanics Lecture 11 Newton s Laws - part 2 Newton s Second Law of Motion An object may have several forces acting on it; the acceleration is due to the net force: Newton s Second Law of
Physics 170 - Mechanics Lecture 11 Newton s Laws - part 2 Newton s Second Law of Motion An object may have several forces acting on it; the acceleration is due to the net force: Newton s Second Law of
PSE Game Physics. Session (6) Angular momentum, microcollisions, damping. Oliver Meister, Roland Wittmann
 Angular momentum, microcollisions, damping. Oliver Meister, Roland Wittmann") PSE Game Physics Session (6) Angular momentum, microcollisions, damping Oliver Meister, Roland Wittmann 23.05.2014 Session (6)Angular momentum, microcollisions, damping, 23.05.2014 1 Outline Angular momentum
PSE Game Physics Session (6) Angular momentum, microcollisions, damping Oliver Meister, Roland Wittmann 23.05.2014 Session (6)Angular momentum, microcollisions, damping, 23.05.2014 1 Outline Angular momentum
To study applications of Newton s Laws as they. To study conditions that establish equilibrium. To consider contact forces and the effects of
 Chap. 5: More Examples with Newton s Law Chap.5: Applying Newton s Laws To study conditions that establish equilibrium. To study applications of Newton s Laws as they apply when the net force is not zero.
Chap. 5: More Examples with Newton s Law Chap.5: Applying Newton s Laws To study conditions that establish equilibrium. To study applications of Newton s Laws as they apply when the net force is not zero.
We ll start today by learning how to change a decimal to a fraction on our calculator! Then we will pick up our Unit 1-5 Review where we left off!
 Welcome to math! We ll start today by learning how to change a decimal to a fraction on our calculator! Then we will pick up our Unit 1-5 Review where we left off! So go back to your normal seat and get
Welcome to math! We ll start today by learning how to change a decimal to a fraction on our calculator! Then we will pick up our Unit 1-5 Review where we left off! So go back to your normal seat and get
Do you know how to find the distance between two points?
 Some notation to understand: is the line through points A and B is the ray starting at point A and extending (infinitely) through B is the line segment connecting points A and B is the length of the line
Some notation to understand: is the line through points A and B is the ray starting at point A and extending (infinitely) through B is the line segment connecting points A and B is the length of the line
Translational Mechanical Systems
 Translational Mechanical Systems Basic (Idealized) Modeling Elements Interconnection Relationships -Physical Laws Derive Equation of Motion (EOM) - SDOF Energy Transfer Series and Parallel Connections
Translational Mechanical Systems Basic (Idealized) Modeling Elements Interconnection Relationships -Physical Laws Derive Equation of Motion (EOM) - SDOF Energy Transfer Series and Parallel Connections
ME751 Advanced Computational Multibody Dynamics
 ME751 Advanced Computational Multibody Dynamics November 2, 2016 Antonio Recuero University of Wisconsin-Madison Quotes of the Day The methods which I set forth do not require either constructions or geometrical
ME751 Advanced Computational Multibody Dynamics November 2, 2016 Antonio Recuero University of Wisconsin-Madison Quotes of the Day The methods which I set forth do not require either constructions or geometrical
ME451 Kinematics and Dynamics of Machine Systems
 ME451 Kinematics and Dynamics of Machine Systems Introduction September 2, 2010 Dan Negrut, 2010 ME451, UW-Madison Dan Negrut University of Wisconsin, Madison Before we get started Today: Discuss Syllabus
ME451 Kinematics and Dynamics of Machine Systems Introduction September 2, 2010 Dan Negrut, 2010 ME451, UW-Madison Dan Negrut University of Wisconsin, Madison Before we get started Today: Discuss Syllabus
Advanced Dynamics. - Lecture 4 Lagrange Equations. Paolo Tiso Spring Semester 2017 ETH Zürich
 Advanced Dynamics - Lecture 4 Lagrange Equations Paolo Tiso Spring Semester 2017 ETH Zürich LECTURE OBJECTIVES 1. Derive the Lagrange equations of a system of particles; 2. Show that the equation of motion
Advanced Dynamics - Lecture 4 Lagrange Equations Paolo Tiso Spring Semester 2017 ETH Zürich LECTURE OBJECTIVES 1. Derive the Lagrange equations of a system of particles; 2. Show that the equation of motion
Variance Partitioning
 Chapter 9 October 22, 2008 ERSH 8320 Lecture #8-10/22/2008 Slide 1 of 33 Today s Lecture Test review and discussion. Today s Lecture Chapter 9: Muddying the waters of regression. What not to do when considering
Chapter 9 October 22, 2008 ERSH 8320 Lecture #8-10/22/2008 Slide 1 of 33 Today s Lecture Test review and discussion. Today s Lecture Chapter 9: Muddying the waters of regression. What not to do when considering
Physics 351, Spring 2015, Homework #5. Due at start of class, Friday, February 20, 2015 Course info is at positron.hep.upenn.
 Physics 351, Spring 2015, Homework #5. Due at start of class, Friday, February 20, 2015 Course info is at positron.hep.upenn.edu/p351 When you finish this homework, remember to visit the feedback page
Physics 351, Spring 2015, Homework #5. Due at start of class, Friday, February 20, 2015 Course info is at positron.hep.upenn.edu/p351 When you finish this homework, remember to visit the feedback page
Approach based on Cartesian coordinates
 GraSMech course 2005-2006 Computer-aided analysis of rigid and flexible multibody systems Approach based on Cartesian coordinates Prof. O. Verlinden Faculté polytechnique de Mons Olivier.Verlinden@fpms.ac.be
GraSMech course 2005-2006 Computer-aided analysis of rigid and flexible multibody systems Approach based on Cartesian coordinates Prof. O. Verlinden Faculté polytechnique de Mons Olivier.Verlinden@fpms.ac.be
Force Vectors and Static Equilibrium
 Force Vectors 1 Force Vectors and Static Equilibrium Overview: In this experiment you will hang weights from pulleys over the edge of a small round force table, to exert various forces on a metal ring
Force Vectors 1 Force Vectors and Static Equilibrium Overview: In this experiment you will hang weights from pulleys over the edge of a small round force table, to exert various forces on a metal ring
Theory and Practice of Rotor Dynamics Prof. Dr. Rajiv Tiwari Department of Mechanical Engineering Indian Institute of Technology Guwahati
 Theory and Practice of Rotor Dynamics Prof. Dr. Rajiv Tiwari Department of Mechanical Engineering Indian Institute of Technology Guwahati Module - 2 Simpul Rotors Lecture - 2 Jeffcott Rotor Model In the
Theory and Practice of Rotor Dynamics Prof. Dr. Rajiv Tiwari Department of Mechanical Engineering Indian Institute of Technology Guwahati Module - 2 Simpul Rotors Lecture - 2 Jeffcott Rotor Model In the
Torques and Static Equilibrium
 Torques and Static Equilibrium INTRODUCTION Archimedes, Greek mathematician, physicist, engineer, inventor and astronomer, was widely regarded as the leading scientist of the ancient world. He made a study
Torques and Static Equilibrium INTRODUCTION Archimedes, Greek mathematician, physicist, engineer, inventor and astronomer, was widely regarded as the leading scientist of the ancient world. He made a study
(Refer Slide Time: 1: 19)
") Mechanical Measurements and Metrology Prof. S. P. Venkateshan Department of Mechanical Engineering Indian Institute of Technology, Madras Module - 4 Lecture - 46 Force Measurement So this will be lecture
Mechanical Measurements and Metrology Prof. S. P. Venkateshan Department of Mechanical Engineering Indian Institute of Technology, Madras Module - 4 Lecture - 46 Force Measurement So this will be lecture
Physics 351 Wednesday, January 14, 2015
 Physics 351 Wednesday, January 14, 2015 Read Chapter 1 for today. Two-thirds of you answered the Chapter 1 questions so far. Read Chapters 2+3 for Friday. Skim Chapter 4 for next Wednesday (1/21). Homework
Physics 351 Wednesday, January 14, 2015 Read Chapter 1 for today. Two-thirds of you answered the Chapter 1 questions so far. Read Chapters 2+3 for Friday. Skim Chapter 4 for next Wednesday (1/21). Homework
Work and kinetic energy. LA info session today at 5pm in UMC235 CAPA homework due tomorrow night.
 Work and kinetic energy LA info session today at 5pm in UMC235 CAPA homework due tomorrow night. 1 Work I apply a force of 2N in the x direction to an object that moves 5m in x. How much work have I done
Work and kinetic energy LA info session today at 5pm in UMC235 CAPA homework due tomorrow night. 1 Work I apply a force of 2N in the x direction to an object that moves 5m in x. How much work have I done
Physics 1020 Experiment 6. Equilibrium of a Rigid Body
 1 2 Introduction Static equilibrium is defined as a state where an object is not moving in any way. The two conditions for the equilibrium of a rigid body (such as a meter stick) are 1. the vector sum
1 2 Introduction Static equilibrium is defined as a state where an object is not moving in any way. The two conditions for the equilibrium of a rigid body (such as a meter stick) are 1. the vector sum
Energy in Planetary Orbits
 Lecture 19: Energy in Orbits, Bohr Atom, Oscillatory Motion 1 Energy in Planetary Orbits Consequences of Kepler s First and Third Laws According to Kepler s First Law of Planetary Motion, all planets move
Lecture 19: Energy in Orbits, Bohr Atom, Oscillatory Motion 1 Energy in Planetary Orbits Consequences of Kepler s First and Third Laws According to Kepler s First Law of Planetary Motion, all planets move
Soil Dynamics Prof. Deepankar Choudhury Department of Civil Engineering Indian Institute of Technology, Bombay
 Soil Dynamics Prof. Deepankar Choudhury Department of Civil Engineering Indian Institute of Technology, Bombay Module - 5 Machine Foundations Lecture - 31 EHS Theory, Vibrational Control Let us start our
Soil Dynamics Prof. Deepankar Choudhury Department of Civil Engineering Indian Institute of Technology, Bombay Module - 5 Machine Foundations Lecture - 31 EHS Theory, Vibrational Control Let us start our
Engineering Mechanics Prof. U. S. Dixit Department of Mechanical Engineering Indian Institute of Technology, Guwahati Introduction to vibration
 Engineering Mechanics Prof. U. S. Dixit Department of Mechanical Engineering Indian Institute of Technology, Guwahati Introduction to vibration Module 15 Lecture 38 Vibration of Rigid Bodies Part-1 Today,
Engineering Mechanics Prof. U. S. Dixit Department of Mechanical Engineering Indian Institute of Technology, Guwahati Introduction to vibration Module 15 Lecture 38 Vibration of Rigid Bodies Part-1 Today,
Module 16: Momentum. p = m v. (16.2.1)
") Module 16: Momentum Law II: The change of motion is proportional to the motive force impressed, and is made in the direction of the right line in which that force is impressed. If any force generates a
Module 16: Momentum Law II: The change of motion is proportional to the motive force impressed, and is made in the direction of the right line in which that force is impressed. If any force generates a
Corner Brook Regional High School
 Corner Brook Regional High School Measurement and Calculations Significant Digits Scientific Notation Converting between Units Accuracy vs. Precision Scalar Quantities Distance Calculations Speed Calculations
Corner Brook Regional High School Measurement and Calculations Significant Digits Scientific Notation Converting between Units Accuracy vs. Precision Scalar Quantities Distance Calculations Speed Calculations
ME451 Kinematics and Dynamics of Machine Systems
 ME451 Kinematics and Dynamics of Machine Systems Cam-Follower Constraints 3.3 Driving Constraints 3.5 October 11, 2011 Dan Negrut, 2011 ME451, UW-Madison "Computers are useless. They can only give you
ME451 Kinematics and Dynamics of Machine Systems Cam-Follower Constraints 3.3 Driving Constraints 3.5 October 11, 2011 Dan Negrut, 2011 ME451, UW-Madison "Computers are useless. They can only give you
Ph211 Summer 09 HW #4, week of 07/13 07/16. Ch6: 44, 46, 52; Ch7: 29, 41. (Knight, 2nd Ed).
.") Solutions 1 for HW #4: Ch6: 44, 46, 52; Ch7: 29, 41. (Knight, 2nd Ed). We make use of: equations of kinematics, and Newton s Laws. You also (routinely) need to handle components of a vector, in nearly
Solutions 1 for HW #4: Ch6: 44, 46, 52; Ch7: 29, 41. (Knight, 2nd Ed). We make use of: equations of kinematics, and Newton s Laws. You also (routinely) need to handle components of a vector, in nearly
Lab 14. Simple Harmonic Motion and Springs: What Is the Mathematical Model of the Simple Harmonic Motion of a Mass Hanging From a Spring?
 Simple Harmonic Motion and Springs What Is the Mathematical Model of the Simple Harmonic Motion of a Mass Hanging From a Spring? Lab Handout Lab 14. Simple Harmonic Motion and Springs: What Is the Mathematical
Simple Harmonic Motion and Springs What Is the Mathematical Model of the Simple Harmonic Motion of a Mass Hanging From a Spring? Lab Handout Lab 14. Simple Harmonic Motion and Springs: What Is the Mathematical
Physics 351 Wednesday, January 10, 2018
 Physics 351 Wednesday, January 10, 2018 Chapers 1 5 mostly review freshman physics, so we ll go through them very quickly in the first few days of class. Read Chapters 1+2 for Friday. Read Chapter 3 (momentum
Physics 351 Wednesday, January 10, 2018 Chapers 1 5 mostly review freshman physics, so we ll go through them very quickly in the first few days of class. Read Chapters 1+2 for Friday. Read Chapter 3 (momentum
Physics 351, Spring 2017, Homework #3. Due at start of class, Friday, February 3, 2017
 Physics 351, Spring 2017, Homework #3. Due at start of class, Friday, February 3, 2017 Course info is at positron.hep.upenn.edu/p351 When you finish this homework, remember to visit the feedback page at
Physics 351, Spring 2017, Homework #3. Due at start of class, Friday, February 3, 2017 Course info is at positron.hep.upenn.edu/p351 When you finish this homework, remember to visit the feedback page at
Multibody simulation
 Multibody simulation Dynamics of a multibody system (Euler-Lagrange formulation) Dimitar Dimitrov Örebro University June 16, 2012 Main points covered Euler-Lagrange formulation manipulator inertia matrix
Multibody simulation Dynamics of a multibody system (Euler-Lagrange formulation) Dimitar Dimitrov Örebro University June 16, 2012 Main points covered Euler-Lagrange formulation manipulator inertia matrix
Dynamics and control of mechanical systems
 Dynamics and control of mechanical systems Date Day 1 (03/05) - 05/05 Day 2 (07/05) Day 3 (09/05) Day 4 (11/05) Day 5 (14/05) Day 6 (16/05) Content Review of the basics of mechanics. Kinematics of rigid
Dynamics and control of mechanical systems Date Day 1 (03/05) - 05/05 Day 2 (07/05) Day 3 (09/05) Day 4 (11/05) Day 5 (14/05) Day 6 (16/05) Content Review of the basics of mechanics. Kinematics of rigid
FIRST YEAR MATHS FOR PHYSICS STUDENTS NORMAL MODES AND WAVES. Hilary Term Prof. G.G.Ross. Question Sheet 1: Normal Modes
 FIRST YEAR MATHS FOR PHYSICS STUDENTS NORMAL MODES AND WAVES Hilary Term 008. Prof. G.G.Ross Question Sheet : Normal Modes [Questions marked with an asterisk (*) cover topics also covered by the unstarred
FIRST YEAR MATHS FOR PHYSICS STUDENTS NORMAL MODES AND WAVES Hilary Term 008. Prof. G.G.Ross Question Sheet : Normal Modes [Questions marked with an asterisk (*) cover topics also covered by the unstarred
2.003 Engineering Dynamics Problem Set 4 (Solutions)
") .003 Engineering Dynamics Problem Set 4 (Solutions) Problem 1: 1. Determine the velocity of point A on the outer rim of the spool at the instant shown when the cable is pulled to the right with a velocity
.003 Engineering Dynamics Problem Set 4 (Solutions) Problem 1: 1. Determine the velocity of point A on the outer rim of the spool at the instant shown when the cable is pulled to the right with a velocity
Hydraulics Prof Dr Arup Kumar Sarma Department of Civil Engineering Indian Institute of Technology, Guwahati
 Hydraulics Prof Dr Arup Kumar Sarma Department of Civil Engineering Indian Institute of Technology, Guwahati Module No # 08 Pipe Flow Lecture No # 04 Pipe Network Analysis Friends, today we will be starting
Hydraulics Prof Dr Arup Kumar Sarma Department of Civil Engineering Indian Institute of Technology, Guwahati Module No # 08 Pipe Flow Lecture No # 04 Pipe Network Analysis Friends, today we will be starting
EXPERIMENTAL PROJECT Rigid Pendulum Experiment
 EXPERIMENTAL PROJECT 2012-2013 Rigid Pendulum Experiment INTRODUCTION The simple pendulum is familiar idea to many students as they will have seen a small mass swinging from side to side at the end of
EXPERIMENTAL PROJECT 2012-2013 Rigid Pendulum Experiment INTRODUCTION The simple pendulum is familiar idea to many students as they will have seen a small mass swinging from side to side at the end of
Computational Techniques Prof. Dr. Niket Kaisare Department of Chemical Engineering Indian Institute of Technology, Madras
 Computational Techniques Prof. Dr. Niket Kaisare Department of Chemical Engineering Indian Institute of Technology, Madras Module No. # 07 Lecture No. # 05 Ordinary Differential Equations (Refer Slide
Computational Techniques Prof. Dr. Niket Kaisare Department of Chemical Engineering Indian Institute of Technology, Madras Module No. # 07 Lecture No. # 05 Ordinary Differential Equations (Refer Slide
FORCE TABLE INTRODUCTION
 FORCE TABLE INTRODUCTION All measurable quantities can be classified as either a scalar 1 or a vector 2. A scalar has only magnitude while a vector has both magnitude and direction. Examples of scalar
FORCE TABLE INTRODUCTION All measurable quantities can be classified as either a scalar 1 or a vector 2. A scalar has only magnitude while a vector has both magnitude and direction. Examples of scalar
DEVIL PHYSICS THE BADDEST CLASS ON CAMPUS IB PHYSICS
 DEVIL PHYSICS THE BADDEST CLASS ON CAMPUS IB PHYSICS TSOKOS LSN 2-2A THE CONCEPT OF FORCE Introductory Video Introducing Sir Isaac Newton Essential Idea: Classical physics requires a force to change a
DEVIL PHYSICS THE BADDEST CLASS ON CAMPUS IB PHYSICS TSOKOS LSN 2-2A THE CONCEPT OF FORCE Introductory Video Introducing Sir Isaac Newton Essential Idea: Classical physics requires a force to change a
Physics 10. Lecture 3A
 Physics 10 Lecture 3A "Your education is ultimately the flavor left over after the facts, formulas, and diagrams have been forgotten." --Paul G. Hewitt Support Forces If the Earth is pulling down on a
Physics 10 Lecture 3A "Your education is ultimately the flavor left over after the facts, formulas, and diagrams have been forgotten." --Paul G. Hewitt Support Forces If the Earth is pulling down on a
1.053J/2.003J Dynamics and Control I Fall Final Exam 18 th December, 2007
 1.053J/2.003J Dynamics and Control I Fall 2007 Final Exam 18 th December, 2007 Important Notes: 1. You are allowed to use three letter-size sheets (two-sides each) of notes. 2. There are five (5) problems
1.053J/2.003J Dynamics and Control I Fall 2007 Final Exam 18 th December, 2007 Important Notes: 1. You are allowed to use three letter-size sheets (two-sides each) of notes. 2. There are five (5) problems
Hooke s Law Simulation. Objectives:
 Name: Hooke s Law Simulation Objectives: 1. Determine the spring constant of an unknown spring. 2. Determine the mass of unknown objects using Hooke s Law. 3. Determine the potential energy stored in a
Name: Hooke s Law Simulation Objectives: 1. Determine the spring constant of an unknown spring. 2. Determine the mass of unknown objects using Hooke s Law. 3. Determine the potential energy stored in a
Oscillations! (Today: Springs)
") Oscillations! (Today: Springs) Extra Practice: 5.34, 5.35, C13.1, C13.3, C13.11, 13.1, 13.3, 13.5, 13.9, 13.11, 13.17, 13.19, 13.21, 13.23, 13.25, 13.27, 13.31 Test #3 is this Wednesday! April 12, 7-10pm,
Oscillations! (Today: Springs) Extra Practice: 5.34, 5.35, C13.1, C13.3, C13.11, 13.1, 13.3, 13.5, 13.9, 13.11, 13.17, 13.19, 13.21, 13.23, 13.25, 13.27, 13.31 Test #3 is this Wednesday! April 12, 7-10pm,
Roots of quadratic equations
 CHAPTER Roots of quadratic equations Learning objectives After studying this chapter, you should: know the relationships between the sum and product of the roots of a quadratic equation and the coefficients
CHAPTER Roots of quadratic equations Learning objectives After studying this chapter, you should: know the relationships between the sum and product of the roots of a quadratic equation and the coefficients
Lecture Note 12: Dynamics of Open Chains: Lagrangian Formulation
 ECE5463: Introduction to Robotics Lecture Note 12: Dynamics of Open Chains: Lagrangian Formulation Prof. Wei Zhang Department of Electrical and Computer Engineering Ohio State University Columbus, Ohio,
ECE5463: Introduction to Robotics Lecture Note 12: Dynamics of Open Chains: Lagrangian Formulation Prof. Wei Zhang Department of Electrical and Computer Engineering Ohio State University Columbus, Ohio,
ME 563 Mechanical Vibrations Lecture #1. Derivation of equations of motion (Newton-Euler Laws)
") ME 563 Mechanical Vibrations Lecture #1 Derivation of equations of motion (Newton-Euler Laws) Derivation of Equation of Motion 1 Define the vibrations of interest - Degrees of freedom (translational, rotational,
ME 563 Mechanical Vibrations Lecture #1 Derivation of equations of motion (Newton-Euler Laws) Derivation of Equation of Motion 1 Define the vibrations of interest - Degrees of freedom (translational, rotational,
1.4 Rewriting Equations
 Friday Homework: begin weekly review Ask your science teacher what formulas you are going to use in science this year (X- Credit) 1 st : Put your homework and Corrections in the yellow folder 2 nd : Take
Friday Homework: begin weekly review Ask your science teacher what formulas you are going to use in science this year (X- Credit) 1 st : Put your homework and Corrections in the yellow folder 2 nd : Take
General Physics (PHY 2130)
") General Physics (PHY 130) Lecture 0 Rotational dynamics equilibrium nd Newton s Law for rotational motion rolling Exam II review http://www.physics.wayne.edu/~apetrov/phy130/ Lightning Review Last lecture:
General Physics (PHY 130) Lecture 0 Rotational dynamics equilibrium nd Newton s Law for rotational motion rolling Exam II review http://www.physics.wayne.edu/~apetrov/phy130/ Lightning Review Last lecture:
PHY131H1S Class 10. Preparation for Practicals this week: Today: Equilibrium Mass, Weight, Gravity Weightlessness
 PHY131H1S Class 10 Today: Equilibrium Mass, Weight, Gravity Weightlessness Preparation for Practicals this week: Take a ride on the Burton Tower elevators! All 4 elevators in the 14-storey tower of McLennan
PHY131H1S Class 10 Today: Equilibrium Mass, Weight, Gravity Weightlessness Preparation for Practicals this week: Take a ride on the Burton Tower elevators! All 4 elevators in the 14-storey tower of McLennan
3. Mathematical Properties of MDOF Systems
 3. Mathematical Properties of MDOF Systems 3.1 The Generalized Eigenvalue Problem Recall that the natural frequencies ω and modes a are found from [ - ω 2 M + K ] a = 0 or K a = ω 2 M a Where M and K are
3. Mathematical Properties of MDOF Systems 3.1 The Generalized Eigenvalue Problem Recall that the natural frequencies ω and modes a are found from [ - ω 2 M + K ] a = 0 or K a = ω 2 M a Where M and K are
Title of Lesson: Can All Things Stretch? RET Project Connection: Failure Modes of Lightweight Sandwich Structures
 Title of Lesson: Can All Things Stretch? RET Project Connection: Failure Modes of Lightweight Sandwich Structures RET Teacher: Michael Wall School: Andover High School Town/District: Andover Public Schools
Title of Lesson: Can All Things Stretch? RET Project Connection: Failure Modes of Lightweight Sandwich Structures RET Teacher: Michael Wall School: Andover High School Town/District: Andover Public Schools
Lab #2: Newton s Second Law
 Physics 144 Chowdary How Things Work Spring 2006 Name: Partners Name(s): Lab #2: Newton s Second Law Introduction In today s exploration, we will investigate the consequences of what is one of the single
Physics 144 Chowdary How Things Work Spring 2006 Name: Partners Name(s): Lab #2: Newton s Second Law Introduction In today s exploration, we will investigate the consequences of what is one of the single
Problem 1: Find the Equation of Motion from the static equilibrium position for the following systems: 1) Assumptions
 Assumptions") Problem 1: Find the Equation of Motion from the static equilibrium position for the following systems: 1) Assumptions k 2 Wheels roll without friction k 1 Motion will not cause block to hit the supports
Problem 1: Find the Equation of Motion from the static equilibrium position for the following systems: 1) Assumptions k 2 Wheels roll without friction k 1 Motion will not cause block to hit the supports
Linearize a non-linear system at an appropriately chosen point to derive an LTI system with A, B,C, D matrices
 Dr. J. Tani, Prof. Dr. E. Frazzoli 151-0591-00 Control Systems I (HS 2018) Exercise Set 2 Topic: Modeling, Linearization Discussion: 5. 10. 2018 Learning objectives: The student can mousavis@ethz.ch, 4th
Dr. J. Tani, Prof. Dr. E. Frazzoli 151-0591-00 Control Systems I (HS 2018) Exercise Set 2 Topic: Modeling, Linearization Discussion: 5. 10. 2018 Learning objectives: The student can mousavis@ethz.ch, 4th
Work and Energy. Work joule Hooke s Law Spring Equilibrium kinetic energy work energy principle translational kinetic energy
 Work and Energy Vocabulary Work joule Hooke s Law Spring Equilibrium kinetic energy work energy principle translational kinetic energy 7-1 Work done by a constant force We will now also discuss the alternative
Work and Energy Vocabulary Work joule Hooke s Law Spring Equilibrium kinetic energy work energy principle translational kinetic energy 7-1 Work done by a constant force We will now also discuss the alternative
Computational Techniques Prof. Dr. Niket Kaisare Department of Chemical Engineering Indian Institute of Technology, Madras
 Computational Techniques Prof. Dr. Niket Kaisare Department of Chemical Engineering Indian Institute of Technology, Madras Module No. # 07 Lecture No. # 04 Ordinary Differential Equations (Initial Value
Computational Techniques Prof. Dr. Niket Kaisare Department of Chemical Engineering Indian Institute of Technology, Madras Module No. # 07 Lecture No. # 04 Ordinary Differential Equations (Initial Value
Chapter 6 Applications of Newton s Laws. Copyright 2010 Pearson Education, Inc.
 Chapter 6 Applications of Newton s Laws Units of Chapter 6 Frictional Forces Strings and Springs Translational Equilibrium Connected Objects Circular Motion 6-1 Frictional Forces Friction has its basis
Chapter 6 Applications of Newton s Laws Units of Chapter 6 Frictional Forces Strings and Springs Translational Equilibrium Connected Objects Circular Motion 6-1 Frictional Forces Friction has its basis
Variance Partitioning
 Lecture 12 March 8, 2005 Applied Regression Analysis Lecture #12-3/8/2005 Slide 1 of 33 Today s Lecture Muddying the waters of regression. What not to do when considering the relative importance of variables
Lecture 12 March 8, 2005 Applied Regression Analysis Lecture #12-3/8/2005 Slide 1 of 33 Today s Lecture Muddying the waters of regression. What not to do when considering the relative importance of variables
Mechanics Oscillations Simple Harmonic Motion
 Mechanics Oscillations Simple Harmonic Motion Lana Sheridan De Anza College Dec 3, 2018 Last time gravity Newton s universal law of gravitation gravitational field gravitational potential energy Overview
Mechanics Oscillations Simple Harmonic Motion Lana Sheridan De Anza College Dec 3, 2018 Last time gravity Newton s universal law of gravitation gravitational field gravitational potential energy Overview
Static Equilibrium. University of Arizona J. H. Burge
 Static Equilibrium Static Equilibrium Definition: When forces acting on an object which is at rest are balanced, then the object is in a state of static equilibrium. - No translations - No rotations In
Static Equilibrium Static Equilibrium Definition: When forces acting on an object which is at rest are balanced, then the object is in a state of static equilibrium. - No translations - No rotations In
Solving Equations with Addition and Subtraction
 OBJECTIVE: You need to be able to solve equations by using addition and subtraction. In math, when you say two things are equal to each other, you mean they represent the same value. We use the = sign
OBJECTIVE: You need to be able to solve equations by using addition and subtraction. In math, when you say two things are equal to each other, you mean they represent the same value. We use the = sign
Physics 2104A. Kinematics and Dynamics. Study Guide
 Adult Basic Education Science Kinematics and Dynamics Prerequisite: Physics 1104 or Science 1206 Credit Value: 1 Text: Physics: Concepts and Connections. Nowikow et al.; Irwin, 2002 Science 10. Ritter
Adult Basic Education Science Kinematics and Dynamics Prerequisite: Physics 1104 or Science 1206 Credit Value: 1 Text: Physics: Concepts and Connections. Nowikow et al.; Irwin, 2002 Science 10. Ritter
Communication Engineering Prof. Surendra Prasad Department of Electrical Engineering Indian Institute of Technology, Delhi
 Communication Engineering Prof. Surendra Prasad Department of Electrical Engineering Indian Institute of Technology, Delhi Lecture - 3 Brief Review of Signals and Systems My subject for today s discussion
Communication Engineering Prof. Surendra Prasad Department of Electrical Engineering Indian Institute of Technology, Delhi Lecture - 3 Brief Review of Signals and Systems My subject for today s discussion
PHYS 100: Lecture 11
 PHYS 00: Lecture UNIVSAL GAVITATION and SPINGS F S x 0 F S x F x F F S = G S F = -k(x x 0 ) PHYS 00 Lecture, Slide usic Who are the Artists? A) Whitney Houston and Tina Turner B) Nina Simone and Patti
PHYS 00: Lecture UNIVSAL GAVITATION and SPINGS F S x 0 F S x F x F F S = G S F = -k(x x 0 ) PHYS 00 Lecture, Slide usic Who are the Artists? A) Whitney Houston and Tina Turner B) Nina Simone and Patti
Physics 351, Spring 2018, Homework #9. Due at start of class, Friday, March 30, 2018
 Physics 351, Spring 218, Homework #9. Due at start of class, Friday, March 3, 218 Please write your name on the LAST PAGE of your homework submission, so that we don t notice whose paper we re grading
Physics 351, Spring 218, Homework #9. Due at start of class, Friday, March 3, 218 Please write your name on the LAST PAGE of your homework submission, so that we don t notice whose paper we re grading
Please read this introductory material carefully; it covers topics you might not yet have seen in class.
 b Lab Physics 211 Lab 10 Torque What You Need To Know: Please read this introductory material carefully; it covers topics you might not yet have seen in class. F (a) (b) FIGURE 1 Forces acting on an object
b Lab Physics 211 Lab 10 Torque What You Need To Know: Please read this introductory material carefully; it covers topics you might not yet have seen in class. F (a) (b) FIGURE 1 Forces acting on an object
Universal gravitation
 Universal gravitation Physics 211 Syracuse University, Physics 211 Spring 2015 Walter Freeman February 22, 2017 W. Freeman Universal gravitation February 22, 2017 1 / 14 Announcements Extra homework help
Universal gravitation Physics 211 Syracuse University, Physics 211 Spring 2015 Walter Freeman February 22, 2017 W. Freeman Universal gravitation February 22, 2017 1 / 14 Announcements Extra homework help
Understand the vocabulary used to describe polynomials Add polynomials Subtract polynomials Graph equations defined by polynomials of degree 2
 Section 5.1: ADDING AND SUBTRACTING POLYNOMIALS When you are done with your homework you should be able to Understand the vocabulary used to describe polynomials Add polynomials Subtract polynomials Graph
Section 5.1: ADDING AND SUBTRACTING POLYNOMIALS When you are done with your homework you should be able to Understand the vocabulary used to describe polynomials Add polynomials Subtract polynomials Graph
CH. I ME2560 STATICS General Principles GENERAL PRINCIPLES. Rigid body mechanics. Fluid mechanics
 1. MECHANICS GENERAL PRINCIPLES Mechanics is the branch of physics (classic) that studies the state of rest or motion of bodies subjected to the action of forces. Rigid body mechanics Mechanics Deformable
1. MECHANICS GENERAL PRINCIPLES Mechanics is the branch of physics (classic) that studies the state of rest or motion of bodies subjected to the action of forces. Rigid body mechanics Mechanics Deformable
Rigid Body Dynamics. Professor Sanjay Sarma. October 21, 2007
 Rigid Body Dynamics Professor Sanjay Sarma October 21, 2007 1.0 Where are we in the course? During the class of September 19th (about a month ago) I finished our coverage of kinematics of frames, systems
Rigid Body Dynamics Professor Sanjay Sarma October 21, 2007 1.0 Where are we in the course? During the class of September 19th (about a month ago) I finished our coverage of kinematics of frames, systems
Physics 101: Lecture 20 Elasticity and Oscillations
 Exam III Physics 101: Lecture 20 Elasticity and Oscillations Today s lecture will cover Textbook Chapter 10.5-10.10 Tuned mass damper (pendulum) in Taipei 101 Physics 101: Lecture 20, Pg 1 Review Energy
Exam III Physics 101: Lecture 20 Elasticity and Oscillations Today s lecture will cover Textbook Chapter 10.5-10.10 Tuned mass damper (pendulum) in Taipei 101 Physics 101: Lecture 20, Pg 1 Review Energy
Assignments VIII and IX, PHYS 301 (Classical Mechanics) Spring 2014 Due 3/21/14 at start of class
 Spring 2014 Due 3/21/14 at start of class") Assignments VIII and IX, PHYS 301 (Classical Mechanics) Spring 2014 Due 3/21/14 at start of class Homeworks VIII and IX both center on Lagrangian mechanics and involve many of the same skills. Therefore,
Assignments VIII and IX, PHYS 301 (Classical Mechanics) Spring 2014 Due 3/21/14 at start of class Homeworks VIII and IX both center on Lagrangian mechanics and involve many of the same skills. Therefore,
Rotational Motion. Figure 1: Torsional harmonic oscillator. The locations of the rotor and fiber are indicated.
 Rotational Motion 1 Purpose The main purpose of this laboratory is to familiarize you with the use of the Torsional Harmonic Oscillator (THO) that will be the subject of the final lab of the course on
Rotational Motion 1 Purpose The main purpose of this laboratory is to familiarize you with the use of the Torsional Harmonic Oscillator (THO) that will be the subject of the final lab of the course on