ME451 Kinematics and Dynamics of Machine Systems
|
|
|
- Donald Thomas
- 6 years ago
- Views:
Transcription
1 ME451 Kinematics and Dynamics of Machine Systems Introduction to Dynamics 6.1 November 6, 2014 Dan Negrut ME451, Fall 2014 University of Wisconsin-Madison Quote of the day: I have never let my schooling interfere with my education. -- Mark Twain
2 Before we get started 2 Last time (before the exam) Calculus of variations: for a function of, Virtual displacements and virtual work (esoteric but important topic) Today Start working towards deriving the equations of motion of a rigid body Today s lecture is not straightforward Project 1 Due date: Nov 11 at 11:59 PM Requires you to use simengine2d in conjunction with excavator example discussed in class Not trivial, requires some thinking
3 The Hammer We ll Use: The D Alembert s Principle 3 D Alembert s Principle For a collection of particles experiencing accelerated motion you can still fall back on the Principle of Virtual Work when you also include in the set of forces acting on each particle its inertia force: NOTES: We are talking above about a collection of particles 1,2,, In our derivation we ll start off regarding each rigid body as a collection of particles that are rigidly connected to each other and that together make up the body The sum above will turn into an integral The ability to compute the virtual work of various forces is crucial We ll spend some time today understanding how various forces and torques are leading to virtual work



4 Virtual Work and Virtual Displacement 4 Y j O G-RF i P r r X P y F P s P O x L-RF f


5 Small changes in q will lead to small changes in location of P 5 In ME451 we are interested in changes in kinematic quantities (locations of a point P, of the orientation matrix A, etc.) due to variations in the location and orientation of a body; i.e., in,, and Variation in location of the LRF: Variation in orientation of the LRF: As far as the change of orientation matrix is concerned, using the result stated a couple of slides ago, we have that a variation in the orientation leads to the following variation in :
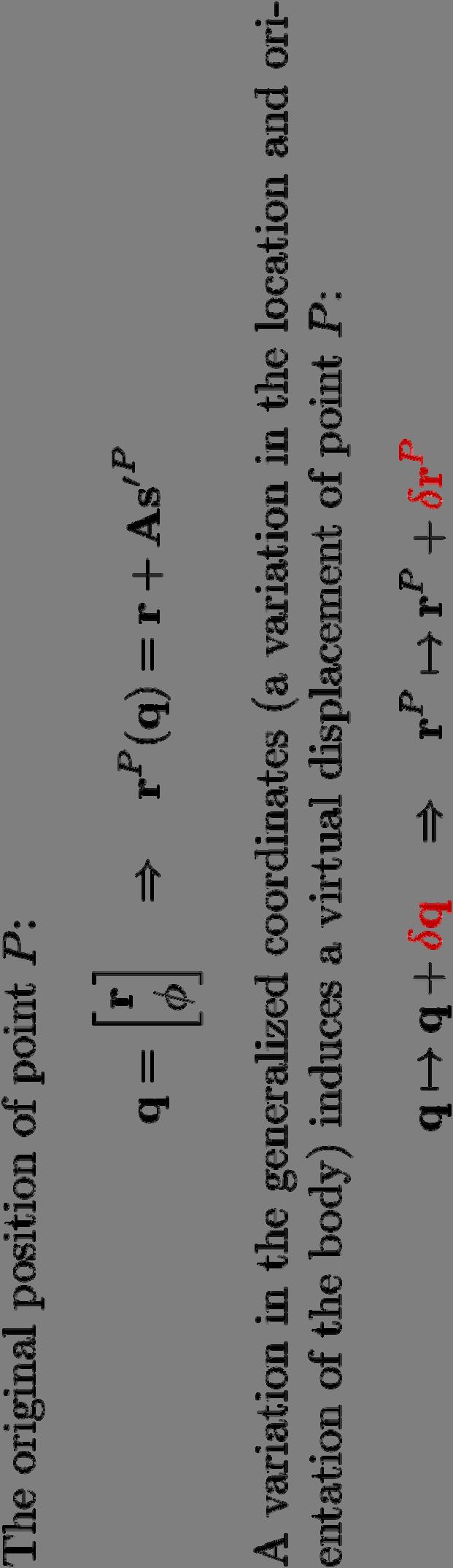
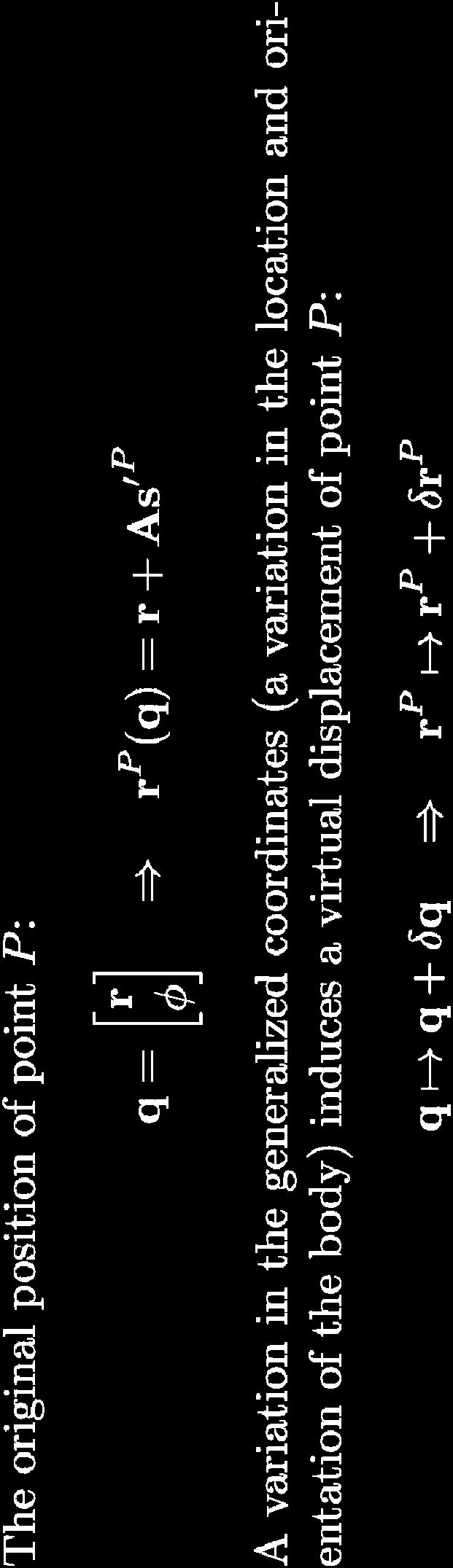
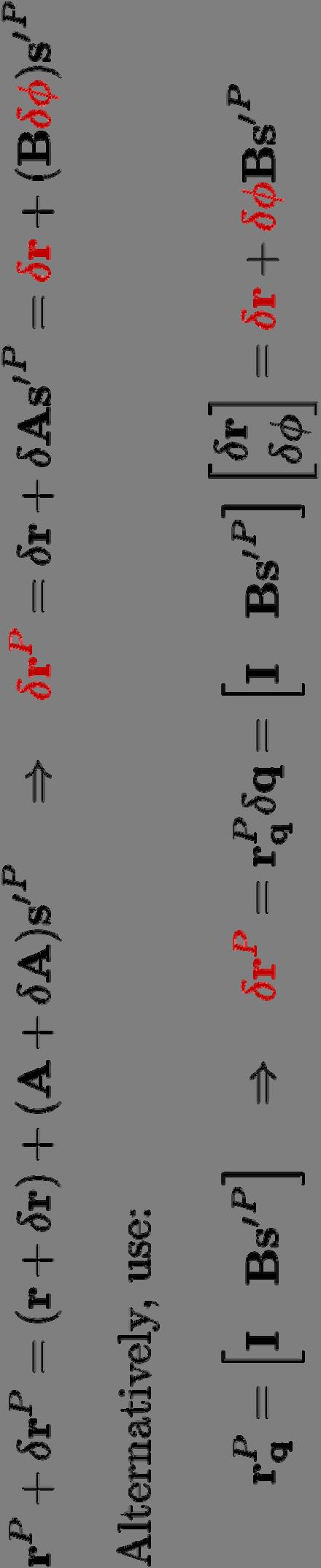
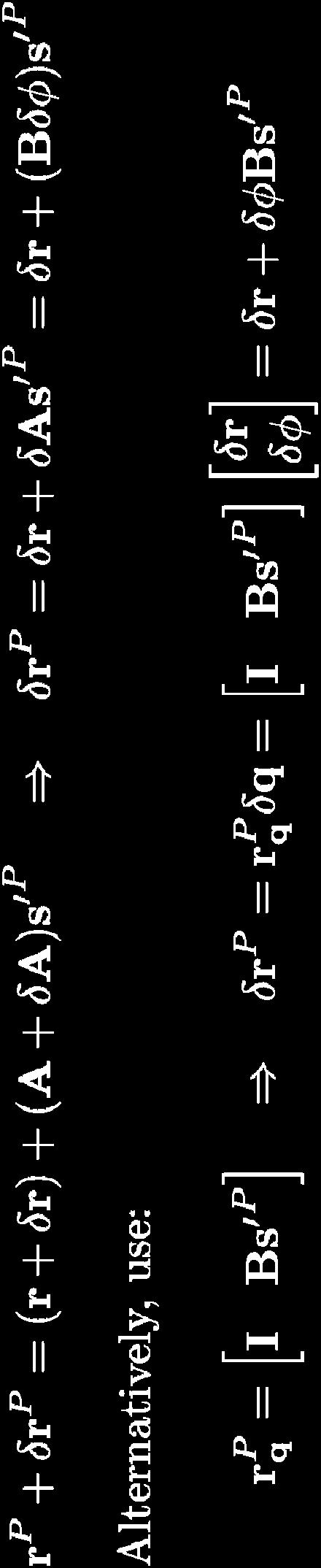
6 Virtual Displacement of a Point Attached to a Rigid Body [tied to previous slide] 6
7 Deriving the EOM 7
8 Some Clarifications 8 Assumptions: All bodies that we work with are rigid (this is consequential) The bodies undergo planar motion We will use a full set of Cartesian coordinates to position and orient a body in the 2D space Start from scratch, that is, from the dynamics of a particle/point mass First, we ll work our way up to determining the EOM for one body Then, we ll learn how to deal with a collection of bodies that are interacting through kinematic joints and/or friction & contact

9 Newton s Laws of Motion 9 1 st Law Every point mass perseveres in its state of being at rest or of moving uniformly straight forward, except insofar as it is compelled to change its state by forces impressed. 2 nd Law A change in motion is proportional to the motive force impressed and takes place along the straight line in which that force is impressed. 3 rd Law To any action there is always an opposite and equal reaction; in other words, the actions of two point masses upon each other are always equal and always opposite in direction. Newton s laws are applied to particles (idealized single point masses) only hold in inertial frames are valid only for non-relativistic speeds Sir Isaac Newton ( )
10 Types of Forces & Torques Acting on a Body 10 Type 1: Distributed over the volume of a body Examples: Inertia forces Internal interaction forces Etc. Type 2: Concentrated at a point Examples: Action (or applied, or external) forces and torques Reaction (or constraint) forces and torques Etc. Y j O G-RF i P r r X P y F P s P O x L-RF f


11 Virtual Work: Dealing with Inertia Forces 11

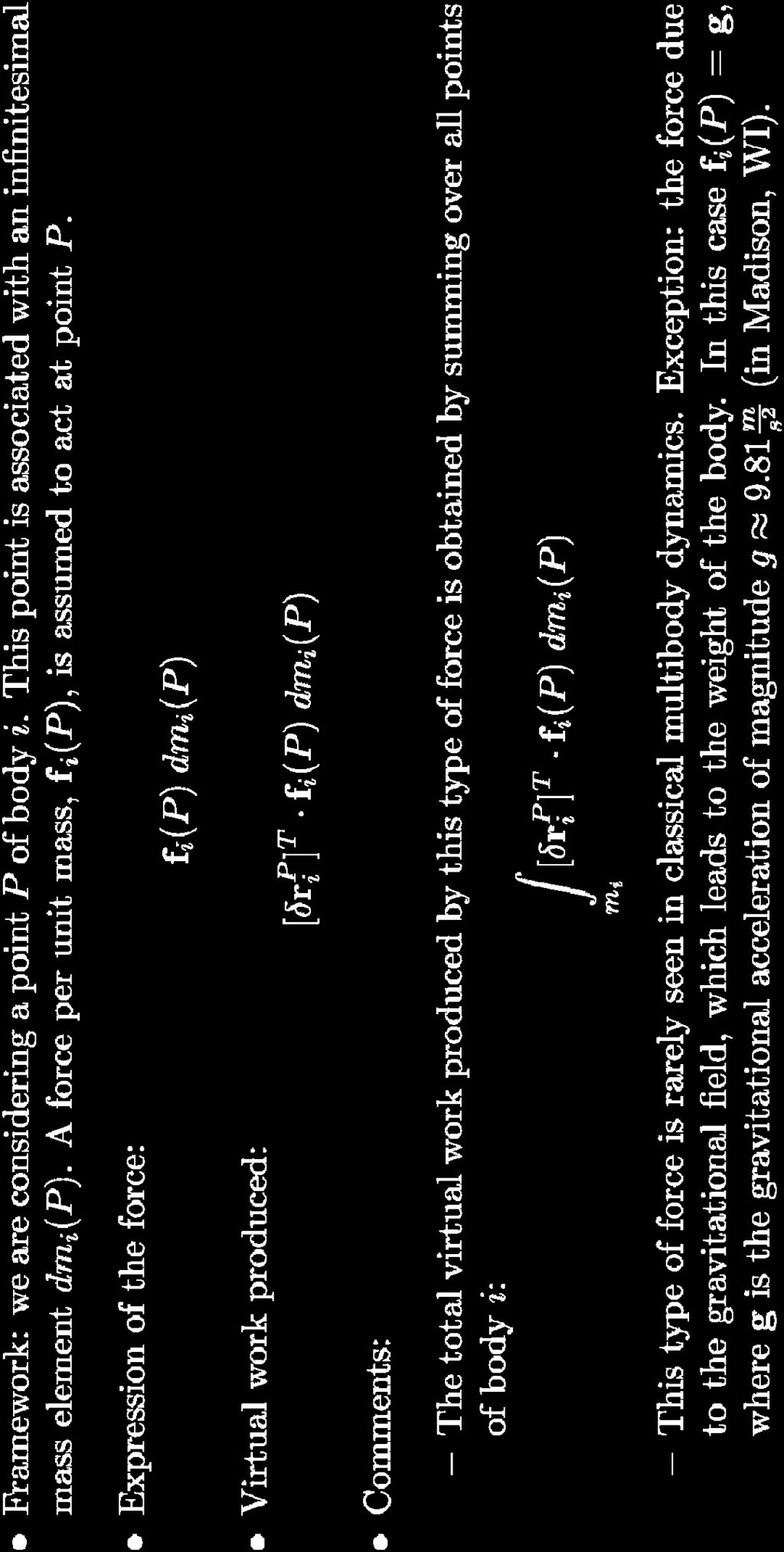
12 Virtual Work: Dealing with Mass-Distributed Forces 12
13 Virtual Work: Dealing with Internal Interaction Forces 13 13


14 Dealing with Active Forces 14


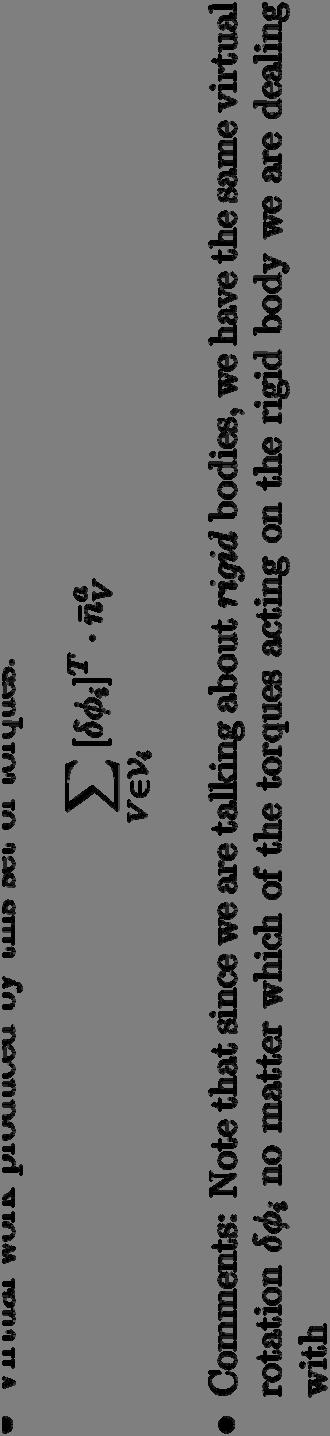
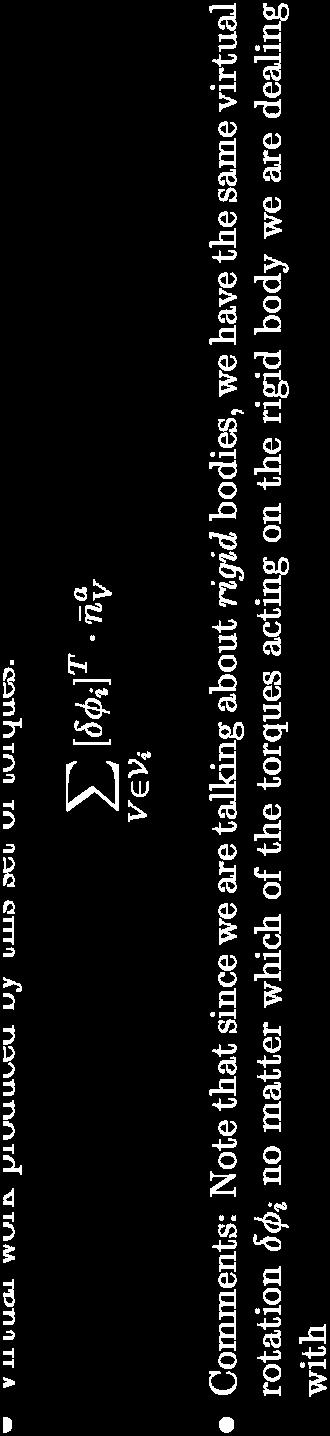
15 Dealing with Active Torques 15
16 Virtual Work: Dealing with Constraint Reaction Forces 16 16


17 Virtual Work: Dealing with Constraint Reaction Torques 17
18 Deriving Newton s Equations for a body with planar motion 18 NOTE: You should be able to derive Newton s equations for a planar rigid body on your own (closed books) Overall, the book does a very good job in explaining the derivation the equations of motion (EOM) for a rigid body The material is straight out of the book (page 200)
19 EOM: First Pass 19 For now, assume that there are no concentrated forces Do this for *one* body for now We are going to deal with the distributed forces and use them in the context of d Alembert s Principle Inertia forces Internal forces Other distributed forces (gravity)

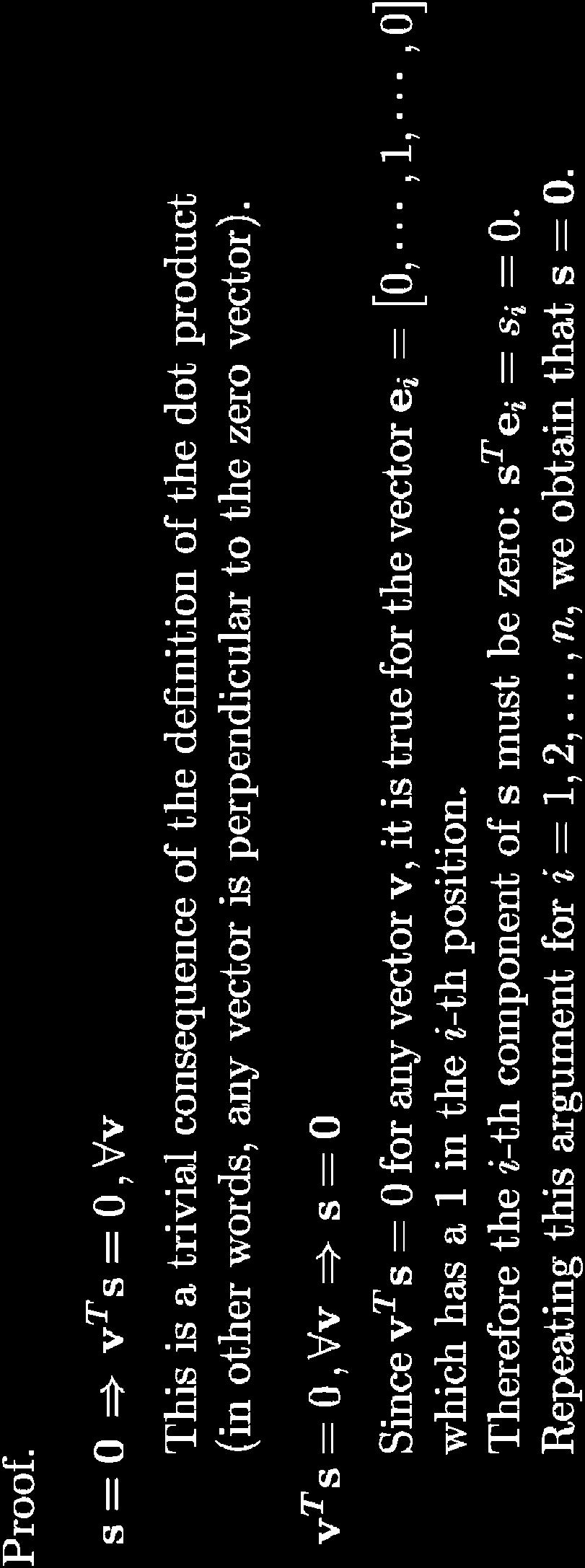
20 [Side Trip] An Orthogonality Theorem 20
21 Newton s EOM for a Differential Mass dm(p) [where the rubber hits the road] 21 Apply Newton s 2 nd law to the differential mass located at point P: This represents a valid way of characterizing the motion of a body: describe the motion of every single particle that makes up that body However Differential equation above involves the internal forces acting within the body These are difficult to completely describe Their number is enormous Idea: simplify these equations taking advantage of the rigid body assumption
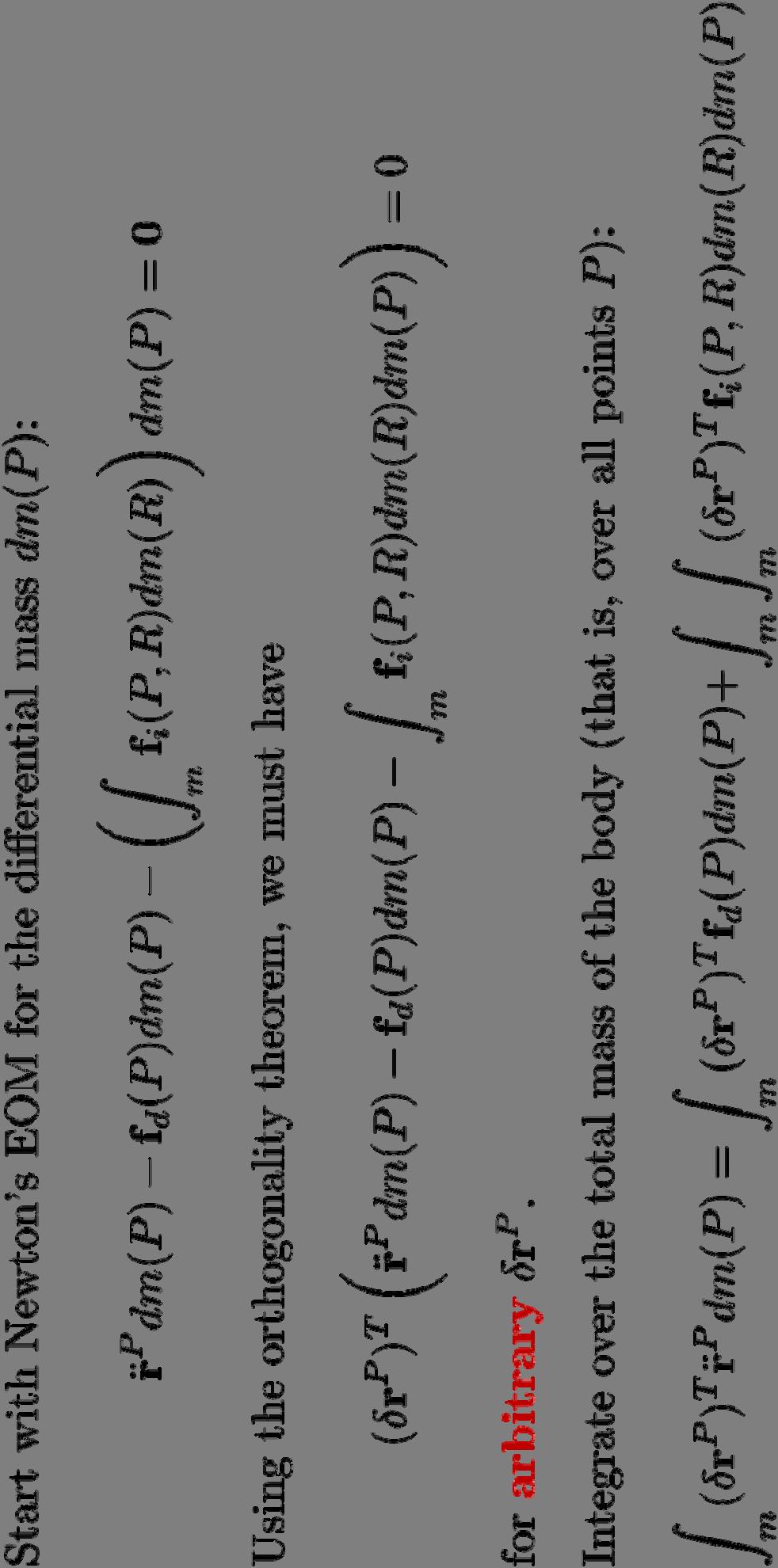

22 Variational EOM for a Rigid Body Part 1/2 22
![The Rigid Body Model: Why we like it [Short Detour, 1/2] 23 In the rigid body model, the](/docs-images/78/76820550/images/23-0.jpg "distance between any pair of points in/on the body is constant: The internal forces, on due to")

23 The Rigid Body Model: Why we like it [Short Detour, 1/2] 23 In the rigid body model, the distance between any pair of points in/on the body is constant: The internal forces, on due to the differential mass, on due to the differential mass satisfy the following conditions: They act along the line connecting points and They are equal in magnitude, opposite in direction, and collinear
24 The Rigid Body Model: Why we like it [Short Detour, 2/2] 24 The distance between any two points and on a rigid body is constant in time: and therefore The internal force, acts along the line between and and therefore is also orthogonal to :




25 Variational EOM for a Rigid Body Part 2/2 25
![[Side Trip]](/docs-images/78/76820550/images/26-0.jpg "D Alembert s")
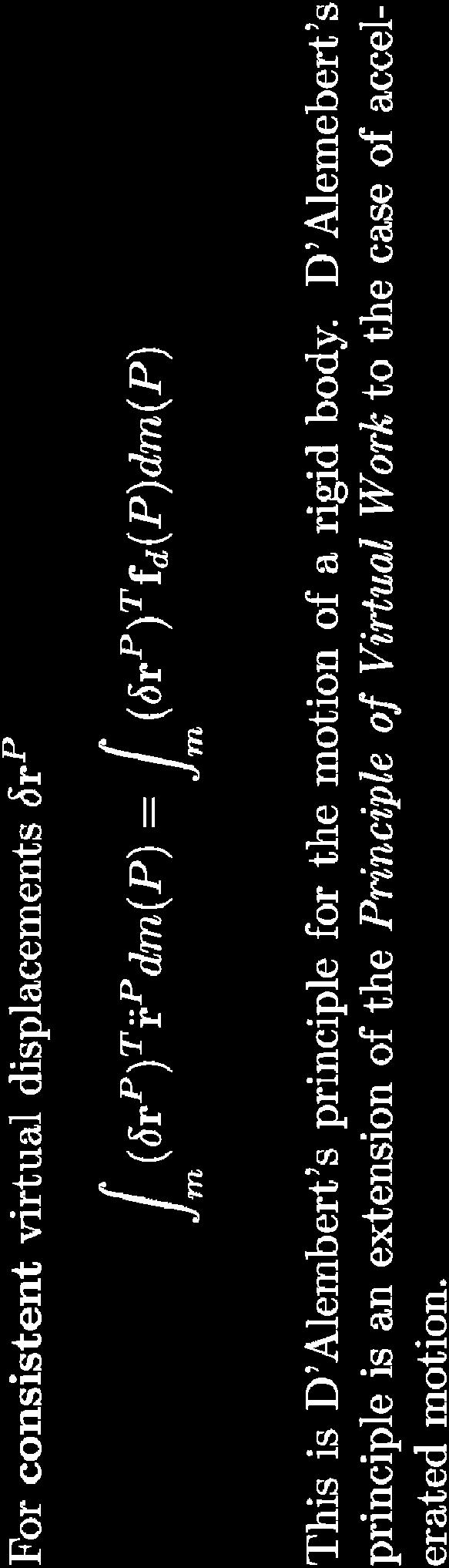

26 [Side Trip] D Alembert s Principle 26 Jean-Baptiste d Alembert ( )
ME451 Kinematics and Dynamics of Machine Systems
 ME451 Kinematics and Dynamics of Machine Systems Introduction to Dynamics 6.1 October 30, 2014 Dan Negrut ME451, Fall 2014 University of Wisconsin-Madison Quote of the day: Computer science education cannot
ME451 Kinematics and Dynamics of Machine Systems Introduction to Dynamics 6.1 October 30, 2014 Dan Negrut ME451, Fall 2014 University of Wisconsin-Madison Quote of the day: Computer science education cannot
ME451 Kinematics and Dynamics of Machine Systems
 ME451 Kinematics and Dynamics of Machine Systems Introduction to Dynamics 6.1 November 11, 2014 Dan Negrut ME451, Fall 2014 University of Wisconsin-Madison Quote of the day: Noise makes little good; good
ME451 Kinematics and Dynamics of Machine Systems Introduction to Dynamics 6.1 November 11, 2014 Dan Negrut ME451, Fall 2014 University of Wisconsin-Madison Quote of the day: Noise makes little good; good
ME751 Advanced Computational Multibody Dynamics
 ME751 Advanced Computational Multibody Dynamics Inverse Dynamics Equilibrium Analysis Various Odd Ends March 18, 2010 Dan Negrut, 2010 ME751, UW-Madison Action speaks louder than words but not nearly as
ME751 Advanced Computational Multibody Dynamics Inverse Dynamics Equilibrium Analysis Various Odd Ends March 18, 2010 Dan Negrut, 2010 ME751, UW-Madison Action speaks louder than words but not nearly as
ME451 Kinematics and Dynamics of Machine Systems
 ME451 Kinematics and Dynamics of Machine Systems Introduction to Dynamics 6.3.4, 6.6 November 25, 2014 Dan Negrut ME451, Fall 2014 University of Wisconsin-Madison Quote of the day: Marge, don't discourage
ME451 Kinematics and Dynamics of Machine Systems Introduction to Dynamics 6.3.4, 6.6 November 25, 2014 Dan Negrut ME451, Fall 2014 University of Wisconsin-Madison Quote of the day: Marge, don't discourage
General Theoretical Concepts Related to Multibody Dynamics
 General Theoretical Concepts Related to Multibody Dynamics Before Getting Started Material draws on two main sources Ed Haug s book, available online: http://sbel.wisc.edu/courses/me751/2010/bookhaugpointers.htm
General Theoretical Concepts Related to Multibody Dynamics Before Getting Started Material draws on two main sources Ed Haug s book, available online: http://sbel.wisc.edu/courses/me751/2010/bookhaugpointers.htm
ME451 Kinematics and Dynamics of Machine Systems
 ME451 Kinematics and Dynamics of Machine Systems Introduction to Dynamics Newmark Integration Formula [not in the textbook] December 9, 2014 Dan Negrut ME451, Fall 2014 University of Wisconsin-Madison
ME451 Kinematics and Dynamics of Machine Systems Introduction to Dynamics Newmark Integration Formula [not in the textbook] December 9, 2014 Dan Negrut ME451, Fall 2014 University of Wisconsin-Madison
ME451 Kinematics and Dynamics of Machine Systems
 ME451 Kinematics and Dynamics of Machine Systems Introduction September 4, 2014 Dan Negrut University of Wisconsin-Madison Quote of the day: "History will be kind to me for I intend to write it -Winston
ME451 Kinematics and Dynamics of Machine Systems Introduction September 4, 2014 Dan Negrut University of Wisconsin-Madison Quote of the day: "History will be kind to me for I intend to write it -Winston
ME751 Advanced Computational Multibody Dynamics. September 14, 2016
 ME751 Advanced Computational Multibody Dynamics September 14, 2016 Quote of the Day My own business always bores me to death; I prefer other people's. -- Oscar Wilde 2 Looking Ahead, Friday Need to wrap
ME751 Advanced Computational Multibody Dynamics September 14, 2016 Quote of the Day My own business always bores me to death; I prefer other people's. -- Oscar Wilde 2 Looking Ahead, Friday Need to wrap
ME751 Advanced Computational Multibody Dynamics
 ME751 Advanced Computational Multibody Dynamics October 7, 2016 Dan Negrut University of Wisconsin-Madison Quotes of the Day [from Samuel] There will come a time when you believe everything is finished.
ME751 Advanced Computational Multibody Dynamics October 7, 2016 Dan Negrut University of Wisconsin-Madison Quotes of the Day [from Samuel] There will come a time when you believe everything is finished.
Dynamics. Dynamics of mechanical particle and particle systems (many body systems)
") Dynamics Dynamics of mechanical particle and particle systems (many body systems) Newton`s first law: If no net force acts on a body, it will move on a straight line at constant velocity or will stay at
Dynamics Dynamics of mechanical particle and particle systems (many body systems) Newton`s first law: If no net force acts on a body, it will move on a straight line at constant velocity or will stay at
First few slides are additional review problems from Chs. 1 and 2. WEST VIRGINIA UNIVERSITY Physics
 First few slides are additional review problems from Chs. 1 and 2 Average Speed A person travels by car from one city to another with different constant speeds between pairs of cities. She drives for 35
First few slides are additional review problems from Chs. 1 and 2 Average Speed A person travels by car from one city to another with different constant speeds between pairs of cities. She drives for 35
Lecture 6. Newton s laws of motion. Important note: First Exam is on Tuesday, Feb. 6, 8:15-9:45 pm
 Lecture 6 Newton s laws of motion Important note: First Exam is on Tuesday, Feb. 6, 8:15-9:45 pm Today s Topics: Newton s Laws of Motion Newton s 1 st Law (Inertial reference frames) Vector nature of forces
Lecture 6 Newton s laws of motion Important note: First Exam is on Tuesday, Feb. 6, 8:15-9:45 pm Today s Topics: Newton s Laws of Motion Newton s 1 st Law (Inertial reference frames) Vector nature of forces
*Definition of Mechanics *Basic Concepts *Newton s Laws *Units
 INTRODUCTION *Definition of Mechanics *Basic Concepts *Newton s Laws *Units Mechanics may be defined as the physical science which describes and predicts the conditions of rest or motion of bodies under
INTRODUCTION *Definition of Mechanics *Basic Concepts *Newton s Laws *Units Mechanics may be defined as the physical science which describes and predicts the conditions of rest or motion of bodies under
Introduction MEAM 535. What is MEAM 535? Audience. Advanced topics in dynamics
 What is MEAM 535? Advanced topics in dynamics Audience Review of Newtonian mechanics MEAM 535 Introduction Analytical mechanics: Lagrangian and Hamiltonian Special topics: Stability of dynamical systems,
What is MEAM 535? Advanced topics in dynamics Audience Review of Newtonian mechanics MEAM 535 Introduction Analytical mechanics: Lagrangian and Hamiltonian Special topics: Stability of dynamical systems,
Chapter 5. Force and Motion I
 Chapter 5 Force and Motion I 5 Force and Motion I 25 October 2018 PHY101 Physics I Dr.Cem Özdoğan 2 3 5-2 Newtonian Mechanics A force is a push or pull acting on a object and causes acceleration. Mechanics
Chapter 5 Force and Motion I 5 Force and Motion I 25 October 2018 PHY101 Physics I Dr.Cem Özdoğan 2 3 5-2 Newtonian Mechanics A force is a push or pull acting on a object and causes acceleration. Mechanics
STATICS & DYNAMICS. Engineering Mechanics. Gary L. Gray. Francesco Costanzo. Michael E. Plesha. University of Wisconsin-Madison
 Engineering Mechanics STATICS & DYNAMICS SECOND EDITION Francesco Costanzo Department of Engineering Science and Mechanics Penn State University Michael E. Plesha Department of Engineering Physics University
Engineering Mechanics STATICS & DYNAMICS SECOND EDITION Francesco Costanzo Department of Engineering Science and Mechanics Penn State University Michael E. Plesha Department of Engineering Physics University
Modesto Junior College Course Outline of Record PHYS 101
 Modesto Junior College Course Outline of Record PHYS 101 I. OVERVIEW The following information will appear in the 2011-2012 catalog PHYS 101 General Physics: Mechanics 5 Units Prerequisite: Satisfactory
Modesto Junior College Course Outline of Record PHYS 101 I. OVERVIEW The following information will appear in the 2011-2012 catalog PHYS 101 General Physics: Mechanics 5 Units Prerequisite: Satisfactory
ME451 Kinematics and Dynamics of Machine Systems
 ME451 Kinematics and Dynamics of Machine Systems Introduction September 2, 2010 Dan Negrut, 2010 ME451, UW-Madison Dan Negrut University of Wisconsin, Madison Before we get started Today: Discuss Syllabus
ME451 Kinematics and Dynamics of Machine Systems Introduction September 2, 2010 Dan Negrut, 2010 ME451, UW-Madison Dan Negrut University of Wisconsin, Madison Before we get started Today: Discuss Syllabus
DEPARTMENT OF MECHANICAL ENGINEERING Dynamics of Machinery. Submitted
 DEPARTMENT OF MECHANICAL ENGINEERING Dynamics of Machinery Submitted 1 UNIT I - Force Analysis INDEX (1) Introduction (2) Newton s Law (3) Types of force Analysis (4) Principle of Super Position (5) Free
DEPARTMENT OF MECHANICAL ENGINEERING Dynamics of Machinery Submitted 1 UNIT I - Force Analysis INDEX (1) Introduction (2) Newton s Law (3) Types of force Analysis (4) Principle of Super Position (5) Free
Physics 12 Unit 2: Vector Dynamics
 1 Physics 12 Unit 2: Vector Dynamics In this unit you will extend your study of forces. In particular, we will examine force as a vector quantity; this will involve solving problems where forces must be
1 Physics 12 Unit 2: Vector Dynamics In this unit you will extend your study of forces. In particular, we will examine force as a vector quantity; this will involve solving problems where forces must be
Summary of Chapters 1-3. Equations of motion for a uniformly acclerating object. Quiz to follow
 Summary of Chapters 1-3 Equations of motion for a uniformly acclerating object Quiz to follow An unbalanced force acting on an object results in its acceleration Accelerated motion in time, t, described
Summary of Chapters 1-3 Equations of motion for a uniformly acclerating object Quiz to follow An unbalanced force acting on an object results in its acceleration Accelerated motion in time, t, described
Test Wed, Feb 8 th 7pm, G20 MING HSIEH Bring your calculator and #2 pencil with a good eraser! 20 Multiple choice questions from:
 Test Wed, Feb 8 th 7pm, G20 MING HSIEH Bring your calculator and #2 pencil with a good eraser! 20 Multiple choice questions from: Chapter 1 (except section 1.2 and 1.7): Unit conversions, estimating, trigonometry,
Test Wed, Feb 8 th 7pm, G20 MING HSIEH Bring your calculator and #2 pencil with a good eraser! 20 Multiple choice questions from: Chapter 1 (except section 1.2 and 1.7): Unit conversions, estimating, trigonometry,
Robotics & Automation. Lecture 06. Serial Kinematic Chain, Forward Kinematics. John T. Wen. September 11, 2008
 Robotics & Automation Lecture 06 Serial Kinematic Chain, Forward Kinematics John T. Wen September 11, 2008 So Far... We have covered rigid body rotational kinematics: representations of SO(3), change of
Robotics & Automation Lecture 06 Serial Kinematic Chain, Forward Kinematics John T. Wen September 11, 2008 So Far... We have covered rigid body rotational kinematics: representations of SO(3), change of
Structural Dynamics Prof. P. Banerji Department of Civil Engineering Indian Institute of Technology, Bombay. Lecture - 1 Introduction
 Structural Dynamics Prof. P. Banerji Department of Civil Engineering Indian Institute of Technology, Bombay Lecture - 1 Introduction Hello, I am Pradipta Banerji from the department of civil engineering,
Structural Dynamics Prof. P. Banerji Department of Civil Engineering Indian Institute of Technology, Bombay Lecture - 1 Introduction Hello, I am Pradipta Banerji from the department of civil engineering,
Lecture 7: More on Newton s Laws
 Lecture 7: More on Newton s Laws Other Important Aspects of the Second Law: Note that = ma is a vector equation, i.e., it is equivalent to saying: = ma x y z = ma = ma An object accelerates in the same
Lecture 7: More on Newton s Laws Other Important Aspects of the Second Law: Note that = ma is a vector equation, i.e., it is equivalent to saying: = ma x y z = ma = ma An object accelerates in the same
Chapter 8- Rotational Motion
 Chapter 8- Rotational Motion Assignment 8 Textbook (Giancoli, 6 th edition), Chapter 7-8: Due on Thursday, November 13, 2008 - Problem 28 - page 189 of the textbook - Problem 40 - page 190 of the textbook
Chapter 8- Rotational Motion Assignment 8 Textbook (Giancoli, 6 th edition), Chapter 7-8: Due on Thursday, November 13, 2008 - Problem 28 - page 189 of the textbook - Problem 40 - page 190 of the textbook
Newton s Laws of Motion. Supplemental Text Material Pages
 Newton s Laws of Motion Supplemental Text Material Pages 300-320 Sir Isaac Newton Born 1642 1665 began individual studies Proved universal gravitation Invented the Calculus Reflector telescope 1672 First
Newton s Laws of Motion Supplemental Text Material Pages 300-320 Sir Isaac Newton Born 1642 1665 began individual studies Proved universal gravitation Invented the Calculus Reflector telescope 1672 First
Lecture 4-1 Force, Mass, Newton's Laws Throughout this semester we have been talking about Classical Mechanics which studies motion of objects at
 Lecture 4-1 orce, Mass, Newton's Laws Throughout this semester we have been talking about Classical Mechanics which studies motion of objects at every-day scale. Classical mechanics can be subdivided into
Lecture 4-1 orce, Mass, Newton's Laws Throughout this semester we have been talking about Classical Mechanics which studies motion of objects at every-day scale. Classical mechanics can be subdivided into
SYLLABUS FORM WESTCHESTER COMMUNITY COLLEGE Valhalla, NY lo595. l. Course #: PHYSC NAME OF ORIGINATOR /REVISOR: ALENA O CONNOR
 SYLLABUS FORM WESTCHESTER COMMUNITY COLLEGE Valhalla, NY lo595 l. Course #: PHYSC 121 2. NAME OF ORIGINATOR /REVISOR: ALENA O CONNOR NAME OF COURSE ENGINEERING PHYSICS 1 WITH LAB 3. CURRENT DATE: SUMMER
SYLLABUS FORM WESTCHESTER COMMUNITY COLLEGE Valhalla, NY lo595 l. Course #: PHYSC 121 2. NAME OF ORIGINATOR /REVISOR: ALENA O CONNOR NAME OF COURSE ENGINEERING PHYSICS 1 WITH LAB 3. CURRENT DATE: SUMMER
Lecture 16 Newton on Space, Time, and Motion
 Lecture 16 Newton on Space, Time, and Motion Patrick Maher Philosophy 270 Spring 2010 Isaac Newton 1642: Born in a rural area 100 miles north of London, England. 1669: Professor of mathematics at Cambridge
Lecture 16 Newton on Space, Time, and Motion Patrick Maher Philosophy 270 Spring 2010 Isaac Newton 1642: Born in a rural area 100 miles north of London, England. 1669: Professor of mathematics at Cambridge
ME751 Advanced Computational Multibody Dynamics
 ME751 Advanced Computational Multibody Dynamics November 2, 2016 Antonio Recuero University of Wisconsin-Madison Quotes of the Day The methods which I set forth do not require either constructions or geometrical
ME751 Advanced Computational Multibody Dynamics November 2, 2016 Antonio Recuero University of Wisconsin-Madison Quotes of the Day The methods which I set forth do not require either constructions or geometrical
Main Ideas in Class Today
 2/4/17 Test Wed, Feb 8th 7pm, G24 Eiesland Bring your calculator and #2 pencil with a good eraser! 20 Multiple choice questions from: Chapter 1 (except section 1.2 and 1.7): Unit conversions, estimating,
2/4/17 Test Wed, Feb 8th 7pm, G24 Eiesland Bring your calculator and #2 pencil with a good eraser! 20 Multiple choice questions from: Chapter 1 (except section 1.2 and 1.7): Unit conversions, estimating,
Video 2.1a Vijay Kumar and Ani Hsieh
 Video 2.1a Vijay Kumar and Ani Hsieh Robo3x-1.3 1 Introduction to Lagrangian Mechanics Vijay Kumar and Ani Hsieh University of Pennsylvania Robo3x-1.3 2 Analytical Mechanics Aristotle Galileo Bernoulli
Video 2.1a Vijay Kumar and Ani Hsieh Robo3x-1.3 1 Introduction to Lagrangian Mechanics Vijay Kumar and Ani Hsieh University of Pennsylvania Robo3x-1.3 2 Analytical Mechanics Aristotle Galileo Bernoulli
PHYSICS 107. Lecture 5 Newton s Laws of Motion
 PHYSICS 107 Lecture 5 Newton s Laws of Motion First Law We saw that the type of motion which was most difficult for Aristotle to explain was horizontal motion of nonliving objects, particularly after they've
PHYSICS 107 Lecture 5 Newton s Laws of Motion First Law We saw that the type of motion which was most difficult for Aristotle to explain was horizontal motion of nonliving objects, particularly after they've
Gravity. Announcement. Topics in Chapter 5. Topics for Today. PHYS 1403 Introduction to Astronomy. Motion. Chapter 5. Exam 1
 PHYS 1403 Introduction to Astronomy Gravity Chapter 5 Announcement Exam 1 February 21 st 2018 2:25pm 3:40 pm during class time Chapter 1,2,3,4 and 5 40 Multiple Questions. One short answer essay type question.
PHYS 1403 Introduction to Astronomy Gravity Chapter 5 Announcement Exam 1 February 21 st 2018 2:25pm 3:40 pm during class time Chapter 1,2,3,4 and 5 40 Multiple Questions. One short answer essay type question.
Modesto Junior College Course Outline of Record PHYS 142
 Modesto Junior College Course Outline of Record PHYS 142 I. OVERVIEW The following information will appear in the 2011-2012 catalog PHYS 142 Mechanics, Heat, & Waves 5 Units Formerly listed as: PHYS -
Modesto Junior College Course Outline of Record PHYS 142 I. OVERVIEW The following information will appear in the 2011-2012 catalog PHYS 142 Mechanics, Heat, & Waves 5 Units Formerly listed as: PHYS -
NEWTON S LAWS OF MOTION. Chapter 2: pages Review questions 1, 5-10, 14, 17, 21-24, 30
 NEWTON S LAWS OF MOTION Chapter 2: pages 37-53 Review questions 1, 5-10, 14, 17, 21-24, 30 Sir Isaac Newton Born 1642 1665 began individual studies Proved universal gravitation Invented the Calculus Reflector
NEWTON S LAWS OF MOTION Chapter 2: pages 37-53 Review questions 1, 5-10, 14, 17, 21-24, 30 Sir Isaac Newton Born 1642 1665 began individual studies Proved universal gravitation Invented the Calculus Reflector
Dynamics: Forces and Newton s Laws of Motion
 Lecture 7 Chapter 5 Dynamics: Forces and Newton s Laws of Motion Course website: http://faculty.uml.edu/andriy_danylov/teaching/physicsi Today we are going to discuss: Chapter 5: Force, Mass: Section 5.1
Lecture 7 Chapter 5 Dynamics: Forces and Newton s Laws of Motion Course website: http://faculty.uml.edu/andriy_danylov/teaching/physicsi Today we are going to discuss: Chapter 5: Force, Mass: Section 5.1
Physics Exam #1 review
 Physics 1010 Exam #1 review General Test Information 7:30 tonight in this room (G1B20). Closed book. Single 3x5 note card with own notes written on it allowed. Calculators are allowed (no memory usage).
Physics 1010 Exam #1 review General Test Information 7:30 tonight in this room (G1B20). Closed book. Single 3x5 note card with own notes written on it allowed. Calculators are allowed (no memory usage).
Chapter 5 Newton s Laws of Motion. Copyright 2010 Pearson Education, Inc.
 Chapter 5 Newton s Laws of Motion Copyright 2010 Pearson Education, Inc. Force and Mass Copyright 2010 Pearson Education, Inc. Units of Chapter 5 Newton s First Law of Motion Newton s Second Law of Motion
Chapter 5 Newton s Laws of Motion Copyright 2010 Pearson Education, Inc. Force and Mass Copyright 2010 Pearson Education, Inc. Units of Chapter 5 Newton s First Law of Motion Newton s Second Law of Motion
Physics 351 Wednesday, January 14, 2015
 Physics 351 Wednesday, January 14, 2015 Read Chapter 1 for today. Two-thirds of you answered the Chapter 1 questions so far. Read Chapters 2+3 for Friday. Skim Chapter 4 for next Wednesday (1/21). Homework
Physics 351 Wednesday, January 14, 2015 Read Chapter 1 for today. Two-thirds of you answered the Chapter 1 questions so far. Read Chapters 2+3 for Friday. Skim Chapter 4 for next Wednesday (1/21). Homework
Phys 1401: General Physics I
 1. (0 Points) What course is this? a. PHYS 1401 b. PHYS 1402 c. PHYS 2425 d. PHYS 2426 2. (0 Points) Which exam is this? a. Exam 1 b. Exam 2 c. Final Exam 3. (0 Points) What version of the exam is this?
1. (0 Points) What course is this? a. PHYS 1401 b. PHYS 1402 c. PHYS 2425 d. PHYS 2426 2. (0 Points) Which exam is this? a. Exam 1 b. Exam 2 c. Final Exam 3. (0 Points) What version of the exam is this?
AP Physics C: Mechanics: Syllabus 2
 AP Physics C: Mechanics: Syllabus 2 Scoring Components SC1 The course covers instruction in kinematics. 3 SC2 The course covers instruction in Newton s laws of 4 motion. SC3 The course covers instruction
AP Physics C: Mechanics: Syllabus 2 Scoring Components SC1 The course covers instruction in kinematics. 3 SC2 The course covers instruction in Newton s laws of 4 motion. SC3 The course covers instruction
Newtons laws - Equations of Motion - Problems. John V Petersen
 Newtons laws - Equations of Motion - Problems John V Petersen Newtons laws 2016 John V Petersen art-science-soul Contents 1. Introduction and Newtons Laws... 4 2. Integration of Newtons 2. Law and Equations
Newtons laws - Equations of Motion - Problems John V Petersen Newtons laws 2016 John V Petersen art-science-soul Contents 1. Introduction and Newtons Laws... 4 2. Integration of Newtons 2. Law and Equations
Course Review. Physics 2210 Fall Semester 2014
 Course Review Physics 2210 Fall Semester 2014 Announcements Unit 21 Simple and Physical Pendula (Nov 24th) HW Due 11/25th as usual No new material Wednesday November 26th. In-class discussion of problems
Course Review Physics 2210 Fall Semester 2014 Announcements Unit 21 Simple and Physical Pendula (Nov 24th) HW Due 11/25th as usual No new material Wednesday November 26th. In-class discussion of problems
Spring 2015, Math 111 Lab 4: Kinematics of Linear Motion
 Spring 2015, Math 111 Lab 4: William and Mary February 24, 2015 Spring 2015, Math 111 Lab 4: Learning Objectives Today, we will be looking at applications of derivatives in the field of kinematics. Learning
Spring 2015, Math 111 Lab 4: William and Mary February 24, 2015 Spring 2015, Math 111 Lab 4: Learning Objectives Today, we will be looking at applications of derivatives in the field of kinematics. Learning
2007 Problem Topic Comment 1 Kinematics Position-time equation Kinematics 7 2 Kinematics Velocity-time graph Dynamics 6 3 Kinematics Average velocity
 2007 Problem Topic Comment 1 Kinematics Position-time equation Kinematics 7 2 Kinematics Velocity-time graph Dynamics 6 3 Kinematics Average velocity Energy 7 4 Kinematics Free fall Collisions 3 5 Dynamics
2007 Problem Topic Comment 1 Kinematics Position-time equation Kinematics 7 2 Kinematics Velocity-time graph Dynamics 6 3 Kinematics Average velocity Energy 7 4 Kinematics Free fall Collisions 3 5 Dynamics
LECTURE 10: Newton's laws of motion
 LECTURE 10: Newton's laws of motion Select LEARNING OBJECTIVES: i. ii. iii. iv. v. vi. vii. viii. Understand that an object can only change its speed or direction if there is a net external force. Understand
LECTURE 10: Newton's laws of motion Select LEARNING OBJECTIVES: i. ii. iii. iv. v. vi. vii. viii. Understand that an object can only change its speed or direction if there is a net external force. Understand
STATICS Chapter 1 Introductory Concepts
 Contents Preface to Adapted Edition... (v) Preface to Third Edition... (vii) List of Symbols and Abbreviations... (xi) PART - I STATICS Chapter 1 Introductory Concepts 1-1 Scope of Mechanics... 1 1-2 Preview
Contents Preface to Adapted Edition... (v) Preface to Third Edition... (vii) List of Symbols and Abbreviations... (xi) PART - I STATICS Chapter 1 Introductory Concepts 1-1 Scope of Mechanics... 1 1-2 Preview
SAN DIEGO COMMUNITY COLLEGE DISTRICT CITY, MESA, AND MIRAMAR COLLEGES ASSOCIATE DEGREE COURSE OUTLINE
 PHYS 195 CIC Approval: 04/27/2006 BOT APPROVAL: 05/25/2006 STATE APPROVAL: EFFECTIVE TERM: Fall 2006 SECTION I SAN DIEGO COMMUNITY COLLEGE DISTRICT CITY, MESA, AND MIRAMAR COLLEGES ASSOCIATE DEGREE COURSE
PHYS 195 CIC Approval: 04/27/2006 BOT APPROVAL: 05/25/2006 STATE APPROVAL: EFFECTIVE TERM: Fall 2006 SECTION I SAN DIEGO COMMUNITY COLLEGE DISTRICT CITY, MESA, AND MIRAMAR COLLEGES ASSOCIATE DEGREE COURSE
Announcements. l Register your iclicker on LON-CAPA. l First exam: Feb 6 in Life Sciences A133
 Announcements l LON-CAPA #1 and Mastering Physics 1+2 due next Tuesday help room hours (Strosacker Help Room, 1248 BPS): M: 5-8 PM W: 5-8 PM F: 2-6 PM l Guest lecturer next Tuesday l Register for Mastering
Announcements l LON-CAPA #1 and Mastering Physics 1+2 due next Tuesday help room hours (Strosacker Help Room, 1248 BPS): M: 5-8 PM W: 5-8 PM F: 2-6 PM l Guest lecturer next Tuesday l Register for Mastering
A B Ax Bx Ay By Az Bz
 Lecture 5.1 Dynamics of Rotation For some time now we have been discussing the laws of classical dynamics. However, for the most part, we only talked about examples of translational motion. On the other
Lecture 5.1 Dynamics of Rotation For some time now we have been discussing the laws of classical dynamics. However, for the most part, we only talked about examples of translational motion. On the other
PHYSICS. Chapter 5 Lecture FOR SCIENTISTS AND ENGINEERS A STRATEGIC APPROACH 4/E RANDALL D. KNIGHT Pearson Education, Inc.
 PHYSICS FOR SCIENTISTS AND ENGINEERS A STRATEGIC APPROACH 4/E Chapter 5 Lecture RANDALL D. KNIGHT Chapter 5 Force and Motion IN THIS CHAPTER, you will learn about the connection between force and motion.
PHYSICS FOR SCIENTISTS AND ENGINEERS A STRATEGIC APPROACH 4/E Chapter 5 Lecture RANDALL D. KNIGHT Chapter 5 Force and Motion IN THIS CHAPTER, you will learn about the connection between force and motion.
TODAY S OUTCOMES: FORCE, MOTION AND ENERGY - Review the Law of Interaction and balanced forces within bodies with constant motion
 TODAY S OUTCOMES: FORCE, MOTION AND ENERGY - Review the Law of Interaction and balanced forces within bodies with constant motion - Observe and plot an example of acceleration of an object - Study the
TODAY S OUTCOMES: FORCE, MOTION AND ENERGY - Review the Law of Interaction and balanced forces within bodies with constant motion - Observe and plot an example of acceleration of an object - Study the
Chapter 5. The Laws of Motion
 Chapter 5 The Laws of Motion The Laws of Motion The description of an object in There was no consideration of what might influence that motion. Two main factors need to be addressed to answer questions
Chapter 5 The Laws of Motion The Laws of Motion The description of an object in There was no consideration of what might influence that motion. Two main factors need to be addressed to answer questions
COLLEGE OF THE DESERT
 COLLEGE OF THE DESERT Course Code ENGR-011 Course Outline of Record 1. Course Code: ENGR-011 2. a. Long Course Title: Statics b. Short Course Title: STATICS 3. a. Catalog Course Description: This course
COLLEGE OF THE DESERT Course Code ENGR-011 Course Outline of Record 1. Course Code: ENGR-011 2. a. Long Course Title: Statics b. Short Course Title: STATICS 3. a. Catalog Course Description: This course
Exam 1 is Two Weeks away.here are some tips:
 Assignment 4 due Friday like almost every Friday Pre-class due 15min before class like every class Help Room: Here, 6-9pm Wed/Thurs SI: Morton 326, M&W 7:15-8:45pm Office Hours: 204 EAL, 10-11am Wed or
Assignment 4 due Friday like almost every Friday Pre-class due 15min before class like every class Help Room: Here, 6-9pm Wed/Thurs SI: Morton 326, M&W 7:15-8:45pm Office Hours: 204 EAL, 10-11am Wed or
Newton s Laws of Motion
 Chapter 4 Newton s Laws of Motion PowerPoint Lectures for University Physics, Thirteenth Edition Hugh D. Young and Roger A. Freedman Lectures by Wayne Anderson Goals for Chapter 4 To understand the meaning
Chapter 4 Newton s Laws of Motion PowerPoint Lectures for University Physics, Thirteenth Edition Hugh D. Young and Roger A. Freedman Lectures by Wayne Anderson Goals for Chapter 4 To understand the meaning
Force and Acceleration Lecture 4
 Force and Acceleration Lecture 4 ˆ In this lecture we continue to discuss force and Newton s laws of motion. ˆ The key is the second law, F = ma. ˆ For equilibrium, a = 0, so the last lecture can be seen
Force and Acceleration Lecture 4 ˆ In this lecture we continue to discuss force and Newton s laws of motion. ˆ The key is the second law, F = ma. ˆ For equilibrium, a = 0, so the last lecture can be seen
Physics 321 Theoretical Mechanics I. University of Arizona Fall 2004 Prof. Erich W. Varnes
 Physics 321 Theoretical Mechanics I University of Arizona Fall 2004 Prof. Erich W. Varnes Contacting me Administrative Matters I will hold office hours on Tuesday from 1-3 pm Room 420K in the PAS building
Physics 321 Theoretical Mechanics I University of Arizona Fall 2004 Prof. Erich W. Varnes Contacting me Administrative Matters I will hold office hours on Tuesday from 1-3 pm Room 420K in the PAS building
ME751 Advanced Computational Multibody Dynamics
 ME751 Advanced Computational Multibody Dynamics Section 9.2 September 16, 2016 Dan Negrut University of Wisconsin-Madison Quote of the day I only believe in statistics that I doctored myself. -- Sir Winston
ME751 Advanced Computational Multibody Dynamics Section 9.2 September 16, 2016 Dan Negrut University of Wisconsin-Madison Quote of the day I only believe in statistics that I doctored myself. -- Sir Winston
Chapter 5. The Laws of Motion
 Chapter 5 The Laws of Motion The Laws of Motion The description of an object in motion included its position, velocity, and acceleration. There was no consideration of what might influence that motion.
Chapter 5 The Laws of Motion The Laws of Motion The description of an object in motion included its position, velocity, and acceleration. There was no consideration of what might influence that motion.
Chapter 8 Lecture Notes
 Chapter 8 Lecture Notes Physics 2414 - Strauss Formulas: v = l / t = r θ / t = rω a T = v / t = r ω / t =rα a C = v 2 /r = ω 2 r ω = ω 0 + αt θ = ω 0 t +(1/2)αt 2 θ = (1/2)(ω 0 +ω)t ω 2 = ω 0 2 +2αθ τ
Chapter 8 Lecture Notes Physics 2414 - Strauss Formulas: v = l / t = r θ / t = rω a T = v / t = r ω / t =rα a C = v 2 /r = ω 2 r ω = ω 0 + αt θ = ω 0 t +(1/2)αt 2 θ = (1/2)(ω 0 +ω)t ω 2 = ω 0 2 +2αθ τ
PHYSICS. Chapter 5 Lecture FOR SCIENTISTS AND ENGINEERS A STRATEGIC APPROACH 4/E RANDALL D. KNIGHT Pearson Education, Inc.
 PHYSICS FOR SCIENTISTS AND ENGINEERS A STRATEGIC APPROACH 4/E Chapter 5 Lecture RANDALL D. KNIGHT Chapter 5 Force and Motion IN THIS CHAPTER, you will learn about the connection between force and motion.
PHYSICS FOR SCIENTISTS AND ENGINEERS A STRATEGIC APPROACH 4/E Chapter 5 Lecture RANDALL D. KNIGHT Chapter 5 Force and Motion IN THIS CHAPTER, you will learn about the connection between force and motion.
Video 3.1 Vijay Kumar and Ani Hsieh
 Video 3.1 Vijay Kumar and Ani Hsieh Robo3x-1.3 1 Dynamics of Robot Arms Vijay Kumar and Ani Hsieh University of Pennsylvania Robo3x-1.3 2 Lagrange s Equation of Motion Lagrangian Kinetic Energy Potential
Video 3.1 Vijay Kumar and Ani Hsieh Robo3x-1.3 1 Dynamics of Robot Arms Vijay Kumar and Ani Hsieh University of Pennsylvania Robo3x-1.3 2 Lagrange s Equation of Motion Lagrangian Kinetic Energy Potential
STATICS SECOND EDITION
 Engineering Mechanics STATICS SECOND EDITION Michael E. Plesha Department of Engineering Physics University of Wisconsin-Madison Gary L. Gray Department of Engineering Science and Mechanics Penn State
Engineering Mechanics STATICS SECOND EDITION Michael E. Plesha Department of Engineering Physics University of Wisconsin-Madison Gary L. Gray Department of Engineering Science and Mechanics Penn State
Quantitative Skills in AP Physics 1
 This chapter focuses on some of the quantitative skills that are important in your AP Physics 1 course. These are not all of the skills that you will learn, practice, and apply during the year, but these
This chapter focuses on some of the quantitative skills that are important in your AP Physics 1 course. These are not all of the skills that you will learn, practice, and apply during the year, but these
NEWTON S LAWS OF MOTION (EQUATION OF MOTION) (Sections )
 (Sections )") NEWTON S LAWS OF MOTION (EQUATION OF MOTION) (Sections 13.1-13.3) Today s Objectives: Students will be able to: a) Write the equation of motion for an accelerating body. b) Draw the free-body and kinetic
NEWTON S LAWS OF MOTION (EQUATION OF MOTION) (Sections 13.1-13.3) Today s Objectives: Students will be able to: a) Write the equation of motion for an accelerating body. b) Draw the free-body and kinetic
CHAPTER 1 INTRODUCTION
 CHAPTER 1 INTRODUCTION DEFINITION OF MECHANICS Mechanics may be defined as the physical science which describes and predicts the conditions of rest or motion of bodies under the action of force systems.
CHAPTER 1 INTRODUCTION DEFINITION OF MECHANICS Mechanics may be defined as the physical science which describes and predicts the conditions of rest or motion of bodies under the action of force systems.
41514 Dynamics of Machinery
 41514 Dynamics of Machinery Theory, Experiment, Phenomenology and Industrial Applications Ilmar Ferreira Santos 1. Recapitulation Mathematical Modeling & Steps 2. Example System of Particle 3. Example
41514 Dynamics of Machinery Theory, Experiment, Phenomenology and Industrial Applications Ilmar Ferreira Santos 1. Recapitulation Mathematical Modeling & Steps 2. Example System of Particle 3. Example
Summary of Chapters 1-3. Equations of motion for a uniformly accelerating object. Quiz to follow
 Summary of Chapters 1-3 Equations of motion for a uniformly accelerating object Quiz to follow An unbalanced force acting on an object results in its acceleration Accelerated motion in time, t, described
Summary of Chapters 1-3 Equations of motion for a uniformly accelerating object Quiz to follow An unbalanced force acting on an object results in its acceleration Accelerated motion in time, t, described
Chapters 10 & 11: Rotational Dynamics Thursday March 8 th
 Chapters 10 & 11: Rotational Dynamics Thursday March 8 th Review of rotational kinematics equations Review and more on rotational inertia Rolling motion as rotation and translation Rotational kinetic energy
Chapters 10 & 11: Rotational Dynamics Thursday March 8 th Review of rotational kinematics equations Review and more on rotational inertia Rolling motion as rotation and translation Rotational kinetic energy
Work, Power, and Energy Lecture 8
 Work, Power, and Energy Lecture 8 ˆ Back to Earth... ˆ We return to a topic touched on previously: the mechanical advantage of simple machines. In this way we will motivate the definitions of work, power,
Work, Power, and Energy Lecture 8 ˆ Back to Earth... ˆ We return to a topic touched on previously: the mechanical advantage of simple machines. In this way we will motivate the definitions of work, power,
Chapter 5. The Laws of Motion
 Chapter 5 The Laws of Motion Sir Isaac Newton 1642 1727 Formulated basic laws of mechanics Discovered Law of Universal Gravitation Invented form of calculus Many observations dealing with light and optics
Chapter 5 The Laws of Motion Sir Isaac Newton 1642 1727 Formulated basic laws of mechanics Discovered Law of Universal Gravitation Invented form of calculus Many observations dealing with light and optics
Newton s Laws of Motion. Monday, September 26, 11
 Newton s Laws of Motion Introduction We ve studied motion in one, two, and three dimensions but what causes motion? This causality was first studied in the late 1600s by Sir Isaac Newton. The laws are
Newton s Laws of Motion Introduction We ve studied motion in one, two, and three dimensions but what causes motion? This causality was first studied in the late 1600s by Sir Isaac Newton. The laws are
Engineering Mechanics Prof. U. S. Dixit Department of Mechanical Engineering Indian Institute of Technology, Guwahati
 Engineering Mechanics Prof. U. S. Dixit Department of Mechanical Engineering Indian Institute of Technology, Guwahati Module No. - 01 Basics of Statics Lecture No. - 01 Fundamental of Engineering Mechanics
Engineering Mechanics Prof. U. S. Dixit Department of Mechanical Engineering Indian Institute of Technology, Guwahati Module No. - 01 Basics of Statics Lecture No. - 01 Fundamental of Engineering Mechanics
Physics 111. Lecture 8 (Walker: 5.1-3) Force (F) Mass (m) Newton s 2 nd Law: F = ma. Summary - 2D Kinematics. = (20.0 m/s)(6.
 Force (F) Mass (m) Newton s 2 nd Law: F = ma. Summary - 2D Kinematics. = (20.0 m/s)(6.") Physics Lecture 8 (Walker: 5.-3) Force (F) Mass (m) Newton s nd Law: F = ma Example: A Supply Drop Helicopter drops supply package to flood victims on raft. When package is released, helicopter is 00 m
Physics Lecture 8 (Walker: 5.-3) Force (F) Mass (m) Newton s nd Law: F = ma Example: A Supply Drop Helicopter drops supply package to flood victims on raft. When package is released, helicopter is 00 m
Section 2: Newton s Laws of Motion (p. 145)
") Section 2: Newton s Laws of Motion (p. 145) 1. In 1686, published Principia, a work explaining laws to help people understand how forces relate to the of objects. Newton s First Law of Motion (p. 145)
Section 2: Newton s Laws of Motion (p. 145) 1. In 1686, published Principia, a work explaining laws to help people understand how forces relate to the of objects. Newton s First Law of Motion (p. 145)
Physics 351 Wednesday, January 10, 2018
 Physics 351 Wednesday, January 10, 2018 Chapers 1 5 mostly review freshman physics, so we ll go through them very quickly in the first few days of class. Read Chapters 1+2 for Friday. Read Chapter 3 (momentum
Physics 351 Wednesday, January 10, 2018 Chapers 1 5 mostly review freshman physics, so we ll go through them very quickly in the first few days of class. Read Chapters 1+2 for Friday. Read Chapter 3 (momentum
EQUATIONS OF MOTION: GENERAL PLANE MOTION (Section 17.5) Today s Objectives: Students will be able to analyze the planar kinetics of a rigid body
 Today s Objectives: Students will be able to analyze the planar kinetics of a rigid body") EQUATIONS OF MOTION: GENERAL PLANE MOTION (Section 17.5) Today s Objectives: Students will be able to analyze the planar kinetics of a rigid body undergoing general plane motion. APPLICATIONS As the soil
EQUATIONS OF MOTION: GENERAL PLANE MOTION (Section 17.5) Today s Objectives: Students will be able to analyze the planar kinetics of a rigid body undergoing general plane motion. APPLICATIONS As the soil
Chapter 4 Statics and dynamics of rigid bodies
 Chapter 4 Statics and dynamics of rigid bodies Bachelor Program in AUTOMATION ENGINEERING Prof. Rong-yong Zhao (zhaorongyong@tongji.edu.cn) First Semester,2014-2015 Content of chapter 4 4.1 Static equilibrium
Chapter 4 Statics and dynamics of rigid bodies Bachelor Program in AUTOMATION ENGINEERING Prof. Rong-yong Zhao (zhaorongyong@tongji.edu.cn) First Semester,2014-2015 Content of chapter 4 4.1 Static equilibrium
Lecture Outline Chapter 5. Physics, 4 th Edition James S. Walker. Copyright 2010 Pearson Education, Inc.
 Lecture Outline Chapter 5 Physics, 4 th Edition James S. Walker Chapter 5 Newton s Laws of Motion Force and Mass Units of Chapter 5 Newton s First Law of Motion Newton s Second Law of Motion Newton s Third
Lecture Outline Chapter 5 Physics, 4 th Edition James S. Walker Chapter 5 Newton s Laws of Motion Force and Mass Units of Chapter 5 Newton s First Law of Motion Newton s Second Law of Motion Newton s Third
Lecture PowerPoints. Chapter 4 Physics: for Scientists & Engineers, with Modern Physics, 4th edition Giancoli
 Lecture PowerPoints Chapter 4 Physics: for Scientists & Engineers, with Modern Physics, 4th edition Giancoli 2009 Pearson Education, Inc. This work is protected by United States copyright laws and is provided
Lecture PowerPoints Chapter 4 Physics: for Scientists & Engineers, with Modern Physics, 4th edition Giancoli 2009 Pearson Education, Inc. This work is protected by United States copyright laws and is provided
Classical Mechanics Lecture 4
 Classical Mechanics Lecture 4 Homework 3 and Midterm Exam 1 Today's Concepts: Newton s Laws a) Acceleration is caused by forces b) Force changes momentum c) Forces always come in pairs d) Good reference
Classical Mechanics Lecture 4 Homework 3 and Midterm Exam 1 Today's Concepts: Newton s Laws a) Acceleration is caused by forces b) Force changes momentum c) Forces always come in pairs d) Good reference
Forces and motion. Announcements. Force: A push or pull between pairs of objects. Newton s First Law: Inertia
 Announcements 1. Exam 1 still going on a. until Monday night b. My advice: take it sooner rather than later, because we re moving on now Forces and motion Aristotle: 384 322 BC, Greece Four elements, two
Announcements 1. Exam 1 still going on a. until Monday night b. My advice: take it sooner rather than later, because we re moving on now Forces and motion Aristotle: 384 322 BC, Greece Four elements, two
Physical Simulation. October 19, 2005
 Physical Simulation October 19, 2005 Objects So now that we have objects, lets make them behave like real objects Want to simulate properties of matter Physical properties (dynamics, kinematics) [today
Physical Simulation October 19, 2005 Objects So now that we have objects, lets make them behave like real objects Want to simulate properties of matter Physical properties (dynamics, kinematics) [today
Circular Motion, Pt 2: Angular Dynamics. Mr. Velazquez AP/Honors Physics
 Circular Motion, Pt 2: Angular Dynamics Mr. Velazquez AP/Honors Physics Formulas: Angular Kinematics (θ must be in radians): s = rθ Arc Length 360 = 2π rads = 1 rev ω = θ t = v t r Angular Velocity α av
Circular Motion, Pt 2: Angular Dynamics Mr. Velazquez AP/Honors Physics Formulas: Angular Kinematics (θ must be in radians): s = rθ Arc Length 360 = 2π rads = 1 rev ω = θ t = v t r Angular Velocity α av
= 40 N. Q = 60 O m s,k
 Sample Exam #2 Technical Physics Multiple Choice ( 6 Points Each ): F app = 40 N 20 kg Q = 60 O = 0 1. A 20 kg box is pulled along a frictionless floor with an applied force of 40 N. The applied force
Sample Exam #2 Technical Physics Multiple Choice ( 6 Points Each ): F app = 40 N 20 kg Q = 60 O = 0 1. A 20 kg box is pulled along a frictionless floor with an applied force of 40 N. The applied force
Force, Motion, and Sound
 Force, Motion, and Sound Physics 160, Spring 2006 Galileo (1564-1642) 1642) Isaac Newton (1643-1727) 1727) Uniform Motion x = 1cm 2cm 3cm 4cm 5cm 6cm 7cm 8cm O t = 1s 2s 3s 4s 5s 6s 7s 8s This picture
Force, Motion, and Sound Physics 160, Spring 2006 Galileo (1564-1642) 1642) Isaac Newton (1643-1727) 1727) Uniform Motion x = 1cm 2cm 3cm 4cm 5cm 6cm 7cm 8cm O t = 1s 2s 3s 4s 5s 6s 7s 8s This picture
Motion. Ifitis60milestoRichmondandyouaretravelingat30miles/hour, itwilltake2hourstogetthere. Tobecorrect,speedisrelative. Ifyou. time.
 Motion Motion is all around us. How something moves is probably the first thing we notice about some process. Quantifying motion is the were we learn how objects fall and thus gravity. Even our understanding
Motion Motion is all around us. How something moves is probably the first thing we notice about some process. Quantifying motion is the were we learn how objects fall and thus gravity. Even our understanding
Newton s Laws of Motion
 DUY TAN UNIVERSITY DEPARTMENT OF NATURAL SCIENCE Newton s Laws of Motion Lecturer: HO VAN TUYEN Da Nang, 2017 Motions Newton s Contributions Sir Isaac Newton (1643-1727) an English scientist and mathematician.
DUY TAN UNIVERSITY DEPARTMENT OF NATURAL SCIENCE Newton s Laws of Motion Lecturer: HO VAN TUYEN Da Nang, 2017 Motions Newton s Contributions Sir Isaac Newton (1643-1727) an English scientist and mathematician.
Chapter 5 - Force and Motion
 I know not what I appear to the world, but to myself I seem to have been only like a boy playing on the sea-shore, and diverting myself in now and then finding a smoother pebble or a prettier shell, whilst
I know not what I appear to the world, but to myself I seem to have been only like a boy playing on the sea-shore, and diverting myself in now and then finding a smoother pebble or a prettier shell, whilst
Space Flight Mechanics Prof. M. Sinha Department of Aerospace Engineering Indian Institute of Technology, Kharagpur
 Space Flight Mechanics Prof. M. Sinha Department of Aerospace Engineering Indian Institute of Technology, Kharagpur Model No. 01 Lecture No. 05 Two Body Problem Before starting with the two body problem,
Space Flight Mechanics Prof. M. Sinha Department of Aerospace Engineering Indian Institute of Technology, Kharagpur Model No. 01 Lecture No. 05 Two Body Problem Before starting with the two body problem,
HADDONFIELD PUBLIC SCHOOLS Curriculum Map for AP Physics, Mechanics C
 Curriculum Map for AP Physics, Mechanics C September Enduring Understandings (The big ideas): Chapter 2 -- Motion Along a Straight Line Essential Questions: How do objects move? 1. Displacement, time,
Curriculum Map for AP Physics, Mechanics C September Enduring Understandings (The big ideas): Chapter 2 -- Motion Along a Straight Line Essential Questions: How do objects move? 1. Displacement, time,
General Physics I. Lecture 9: Vector Cross Product. Prof. WAN, Xin ( 万歆 )
") General Physics I Lecture 9: Vector Cross Product Prof. WAN, Xin ( 万歆 ) xinwan@zju.edu.cn http://zimp.zju.edu.cn/~xinwan/ Outline Examples of the rotation of a rigid object about a fixed axis Force/torque
General Physics I Lecture 9: Vector Cross Product Prof. WAN, Xin ( 万歆 ) xinwan@zju.edu.cn http://zimp.zju.edu.cn/~xinwan/ Outline Examples of the rotation of a rigid object about a fixed axis Force/torque
Advanced Dynamics. - Lecture 4 Lagrange Equations. Paolo Tiso Spring Semester 2017 ETH Zürich
 Advanced Dynamics - Lecture 4 Lagrange Equations Paolo Tiso Spring Semester 2017 ETH Zürich LECTURE OBJECTIVES 1. Derive the Lagrange equations of a system of particles; 2. Show that the equation of motion
Advanced Dynamics - Lecture 4 Lagrange Equations Paolo Tiso Spring Semester 2017 ETH Zürich LECTURE OBJECTIVES 1. Derive the Lagrange equations of a system of particles; 2. Show that the equation of motion
Today s Lecture: Kinematics in Two Dimensions (continued) A little bit of chapter 4: Forces and Newton s Laws of Motion (next time)
 A little bit of chapter 4: Forces and Newton s Laws of Motion (next time)") Today s Lecture: Kinematics in Two Dimensions (continued) Relative Velocity - 2 Dimensions A little bit of chapter 4: Forces and Newton s Laws of Motion (next time) 27 September 2009 1 Relative Velocity
Today s Lecture: Kinematics in Two Dimensions (continued) Relative Velocity - 2 Dimensions A little bit of chapter 4: Forces and Newton s Laws of Motion (next time) 27 September 2009 1 Relative Velocity
What path do the longest sparks take after they leave the wand? Today we ll be doing one more new concept before the test on Wednesday.
 What path do the longest sparks take after they leave the wand? Today we ll be doing one more new concept before the test on Wednesday. Centripetal Acceleration and Newtonian Gravitation Reminders: 15
What path do the longest sparks take after they leave the wand? Today we ll be doing one more new concept before the test on Wednesday. Centripetal Acceleration and Newtonian Gravitation Reminders: 15
Friction forces. Lecture 8. Chapter 6. Physics I. Course website:
 Lecture 8 Physics I Chapter 6 Friction forces Course website: http://faculty.uml.edu/andriy_danylov/teaching/physicsi Today we are going to discuss: Chapter 6: Some leftover (Ch.5) Kinetic/Static Friction:
Lecture 8 Physics I Chapter 6 Friction forces Course website: http://faculty.uml.edu/andriy_danylov/teaching/physicsi Today we are going to discuss: Chapter 6: Some leftover (Ch.5) Kinetic/Static Friction:
Chapter 4: Newton's Laws of Motion
 Chapter 4 Lecture Chapter 4: Newton's Laws of Motion Goals for Chapter 4 To understand force either directly or as the net force of multiple components. To study and apply Newton's first law. To study
Chapter 4 Lecture Chapter 4: Newton's Laws of Motion Goals for Chapter 4 To understand force either directly or as the net force of multiple components. To study and apply Newton's first law. To study