ME451 Kinematics and Dynamics of Machine Systems
|
|
|
- Cleopatra Stevenson
- 5 years ago
- Views:
Transcription
1 ME451 Kinematics and Dynamics of Machine Systems Introduction September 4, 2014 Dan Negrut University of Wisconsin-Madison Quote of the day: "History will be kind to me for I intend to write it -Winston Churchill
2 Before we get started 2 Last time Discussed Syllabus In ME451 we are interested in figuring out how bodies move Key observation: We pursue a general approach that works for all mechanisms This approach might not be the simplest but computers are super fast these days Today Review of vector operations and linear algebra HW: 2.2.5, 2.2.8, Due in one week, at 9:30 am
3 Modeling & Simulation (1) 3 M&S applies to many (most?) disciplines: engineering, physics, chemistry, biology, economics, etc. The goal is to figure out how something happens without having to actually (build it and) test it in real-life. Modeling is the abstraction of reality while simulation is the execution of the model. Computer M&S: Start with a physical phenomenon Use laws, principles, scientific theories to extract a mathematical model (a set of equations that describe the salient features of the particular problem) Figure out a numerical solution algorithm for solving your math problem Implement computer code Simulate, that is run the code (also called carrying out the analysis ) Post-process to turn raw data into useful information for analysis, visualization, and animation Interpret results Side note: as close as you ll get in Mechanical Engineering to video gaming



 q = q_prev +")
*qdd_prev +")
*qdd_prev +")

4 Modeling & Simulation (2) 4 Geometrical Model Mathematical Model Physical Reality Solution Algorithm Post-processing Computer Implementation % Update position and velocity (using Newmark) q = q_prev + h*qd_prev + 0.5*h^2*((1-2*beta)*qdd_prev + 2*beta*qdd); qd = qd_prev + h*((1-gam)*qdd_prev + gam*qdd); Simulation Essentially, all models are wrong, but some are useful. George Box & Norman Draper
5 More on the Computational Perspective 5 Everything that we do in ME451 is governed by Newton s Second Law. We pose the problem so that it is suited for solution using a computer: 1. Identify in a simple and general way the data that is needed to formulate the equations of motion. 2. Automatically solve the set of nonlinear equations of motion using appropriate numerical solution algorithms: e.g. Newton-Raphson, Newmark Numerical Integration Method, etc. 3. Provide post-processing support for analysis of results: e.g. plot time curves for quantities of interest, animate the mechanism, etc.
6 Overview of the Class [Chapter numbers according to Haug s book] 6 Chapter 1 general considerations regarding the scope and goal of Kinematics and Dynamics (with a computational slant) Chapter 2 review of basic Linear Algebra and Calculus Linear Algebra: Focus on geometric vectors and matrix-vector operations Calculus: Focus on taking partial derivatives (a lot of this), handling time derivatives, chain rule (a lot of this too) Chapter 3 introduces the concept of kinematic constraint as the mathematical building block used to represent joints in mechanical systems This is the hardest part of the material covered Basically poses the Kinematics problem Chapter 4 quick discussion of the numerical algorithms used to solve Kinematics problem formulated in Chapter 3 Chapter 5 applications (Kinematics) Only tangentially touching it; ADAMS assignments Chapter 6 formulation of the Dynamics problem: derivation of the equations of motion (EOM) Chapter 7 numerical methods for solving the Dynamics problem formulated in Chapter 6 Haug s book is available online at the class website
7 7 ADAMS Automatic Dynamic Analysis of Mechanical Systems It says Dynamics in name, but it does a whole lot more Kinematics, Statics, Quasi-Statics, etc. Philosophy behind software package Offer a pre-processor (ADAMS/View) for people to be able to generate models Offer a solution engine (ADAMS/Solver) for people to be able to find the time evolution of their models Offer a post-processor (ADAMS/PPT) for people to be able to animate and plot results It now has a variety of so-called vertical products, which all draw on the ADAMS/Solver, but address applications from a specific field: ADAMS/Car, ADAMS/Rail, ADAMS/Controls, ADAMS/Linear, ADAMS/Hydraulics, ADAMS/Flex, ADAMS/Engine, etc. ADAMS tutorial: October 9, Room TBA (given by Justin Madsen)
8 2.1, 2.3 PLANAR VECTORS
9 Geometric Entities in Kinematics and Dynamics 9 Kinematics & Dynamics of systems of rigid bodies require the ability to describe the position, velocity, and acceleration of each body in the system Geometric vectors and orthogonal matrices provide the most natural description: Geometric vectors - used to locate points on a body and the center of mass of a rigid body, to describe forces and torques, etc. Orthogonal matrices - used to describe the orientation of a body ME451, Planar Kinematics and Dynamics Calls exclusively for use of 2D vectors and 2x2 orthogonal matrices
10 Geometric Vectors 10 What is a Geometric Vector? A geometrical entity that has: A support line A direction A magnitude (length) A directed line segment (arrow) and therefore has a start point and an end point such that: Its support line is the line defined by A and B Its direction is from the start point A to the end point B Its magnitude is the distance between the points A and B IMPORTANT: If the start point is fixed in space, called bound vector If the start point is of no importance, called free vector (therefore and represent the exact same free vector)




11 G. Vectors: Free vectors and Bound vectors 11
12 G. Vectors: Operations 12 What operations are defined for 2D geometric vectors? Scaling by a scalar Addition of 2D geometric vectors (the parallelogram rule) Multiplication of 2D geometric vectors (result in scalars!) The inner product (a.k.a. dot product) The outer product The angle between two geometric vectors A review these definitions follows next


13 G. Vector Operation : Scaling by 13 A B O
 Obtained by")

14 14 G. Vector Operation: Addition of Two G. Vectors Sum of two vectors (definition) Obtained by the parallelogram rule Operation is commutative Easy to visualize, somewhat messy to summarize in an analytical fashion:




15 15 G. Vector Operation: Dot Product of Two G. Vectors The product between the magnitude of the first geometric vector and the projection of the second vector onto the first vector Note that operation is commutative Two immediate consequences The dot product of a vector with itself gives the square of its magnitude: Two vector are orthogonal if and only if their dot product vanishes:

 vector Calculating the")
16 16 G. Vector Operation: Angle Between Two G. Vectors Note that Important: Angles are positive counterclockwise This is why when measuring the angle between two vectors it s important which one is the first (start) vector Calculating the angle between two vectors:
17 G. Vector Operations: Properties 17 P1 The sum of geometric vectors is associative P2 Distributivity (multiplication with scalars) P3 Distributivity (dot product) NOTE: The dot product does not obey the cancellation law. In other words,
18 [handout] Distributivity Property (geometric proof) 18 Prove (geometrically) that the dot product is distributive with respect to the vector sum:
19 Reference Frames. [Making Things Simpler] 19 Geometric vectors: Intuitive and easy to visualize Cumbersome to manipulate Hard to carry out simple operations (recall proving the distributive property on previous slide) Difficult to implement in computer code (operations on geometric vectors are difficult to be provided as recipes, unlike for operations on vectors and matrices) To address these drawbacks, we seek alternative ways for expressing geometric vectors: introduce a Reference Frame (RF) in which we express all our vectors



20 RF: Basis Vectors 20
21 21 RF: We will always use right-handed orthogonal RFs O O O


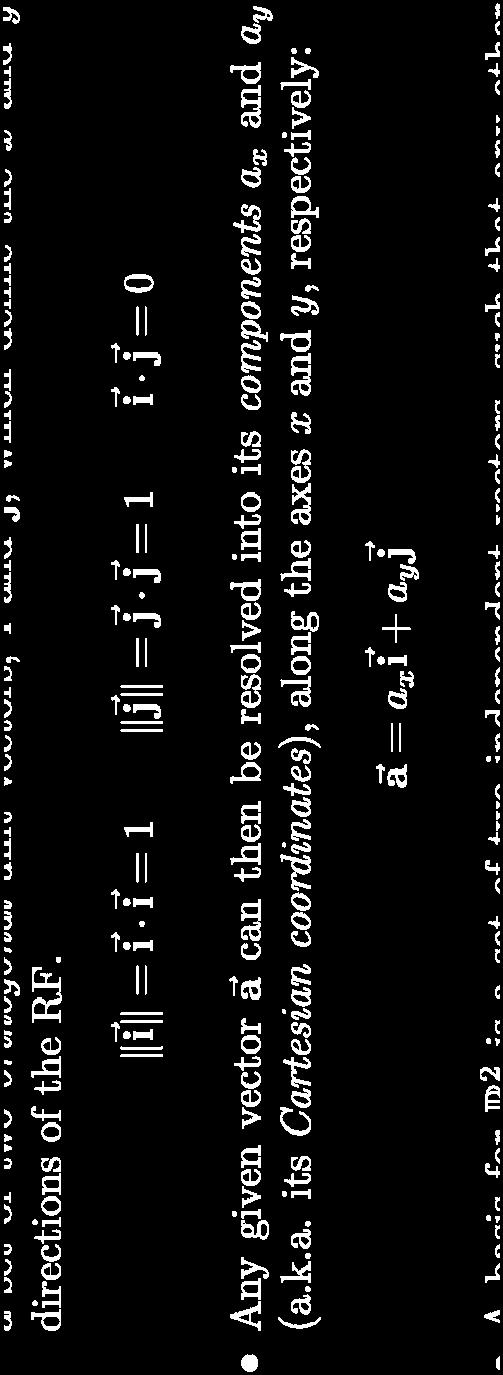
22 G. Vectors: Operations in RF (1) 22

23 G. Vectors: Operations in RF (2) 23


24 New Concept: Algebraic Vectors 24 Given a RF, each vector can be represented by a pair of Cartesian components: It is therefore natural to associate to each geometric vector a twodimensional algebraic vector: Note that I dropped the arrow on a to indicate that we are talking about an algebraic vector. Convention: throughout this class, vectors and matrices are bold, while scalars are not (most often they are in italics).


25 Putting Things in Perspective 25 Step 1: We started with geometric vectors Step 2: We introduced a reference frame Step 3: Relative to that reference frame each geometric vector is uniquely represented as a pair of scalars (the Cartesian coordinates) Step 4: We generated an algebraic vector whose two entries are provided by the pair above This vector is the algebraic representation of the geometric vector Note that the algebraic representations of the basis vectors are


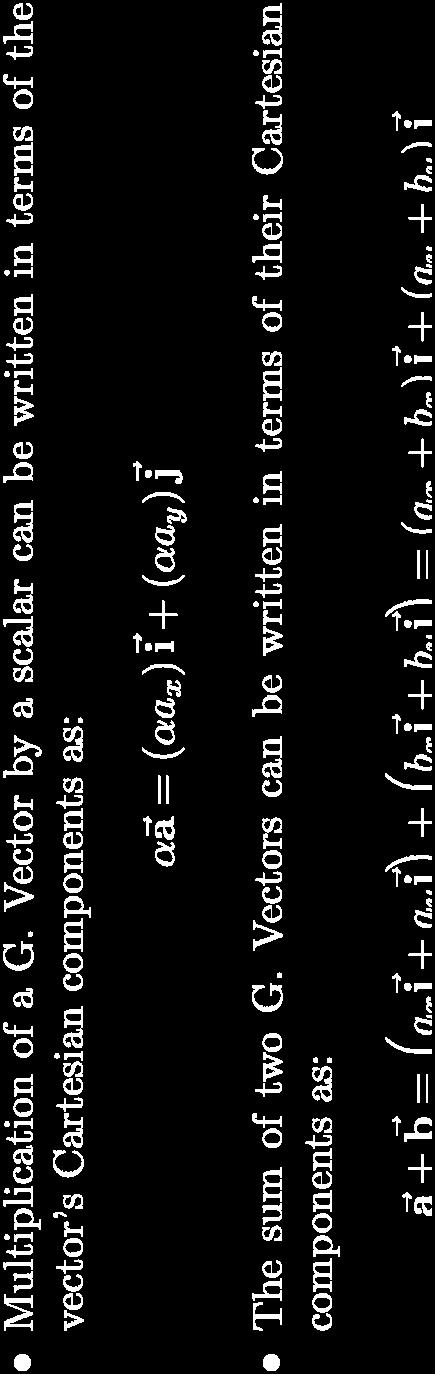
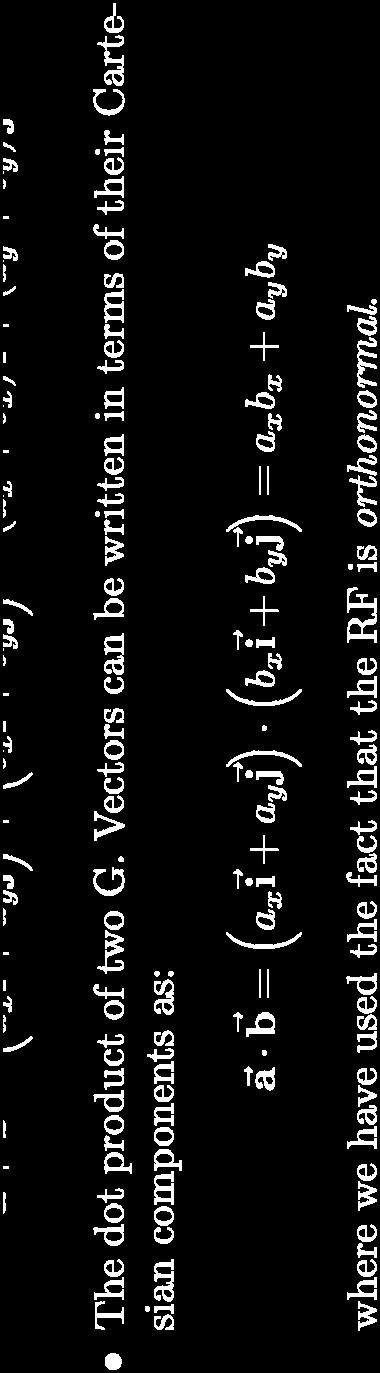
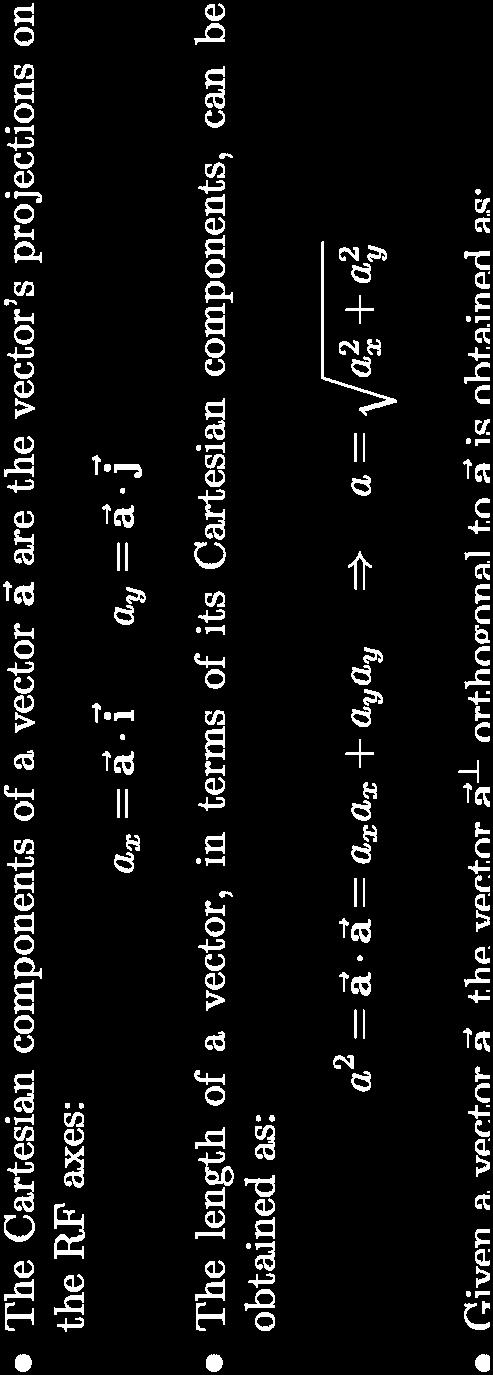
26 26 G. Vector Ops. A. Vector Ops. It is easy to see how you have to modify the algebraic representation of a geometric vector if you modify this geometric vector Scaling a G. Vector Scaling of corresponding A. Vector Adding two G. Vectors Adding the corresponding two A. Vectors Dot product of two G. Vectors Dot Product of the two A. Vectors Calculating the angle between two G. Vectors was based on their dot product use the dot product of the corresponding A. Vectors
27 2.2 MATRIX ALGEBRA


28 Recall Notation Conventions 28


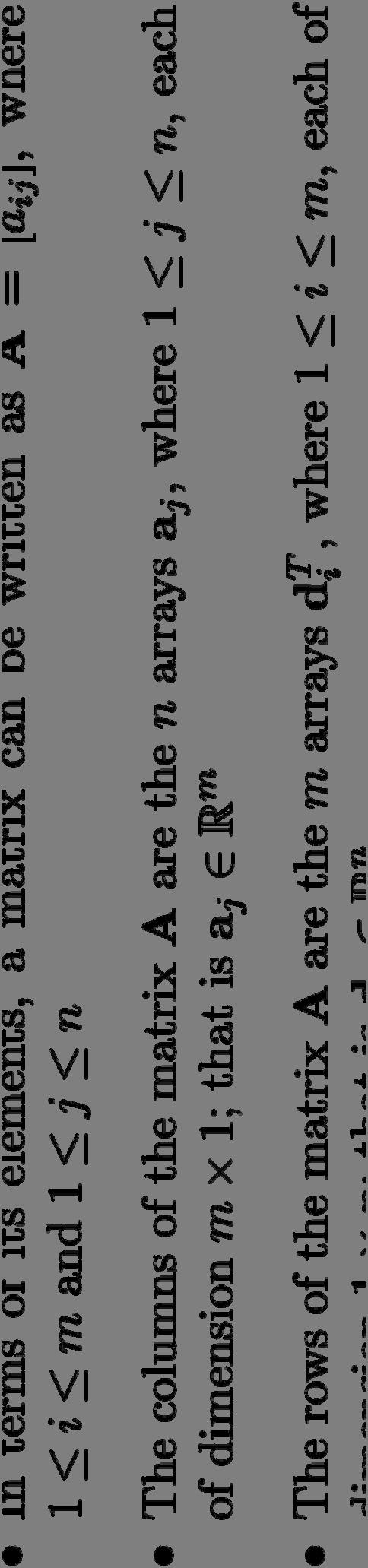

29 Matrix Review 29


30 Matrix Addition 30
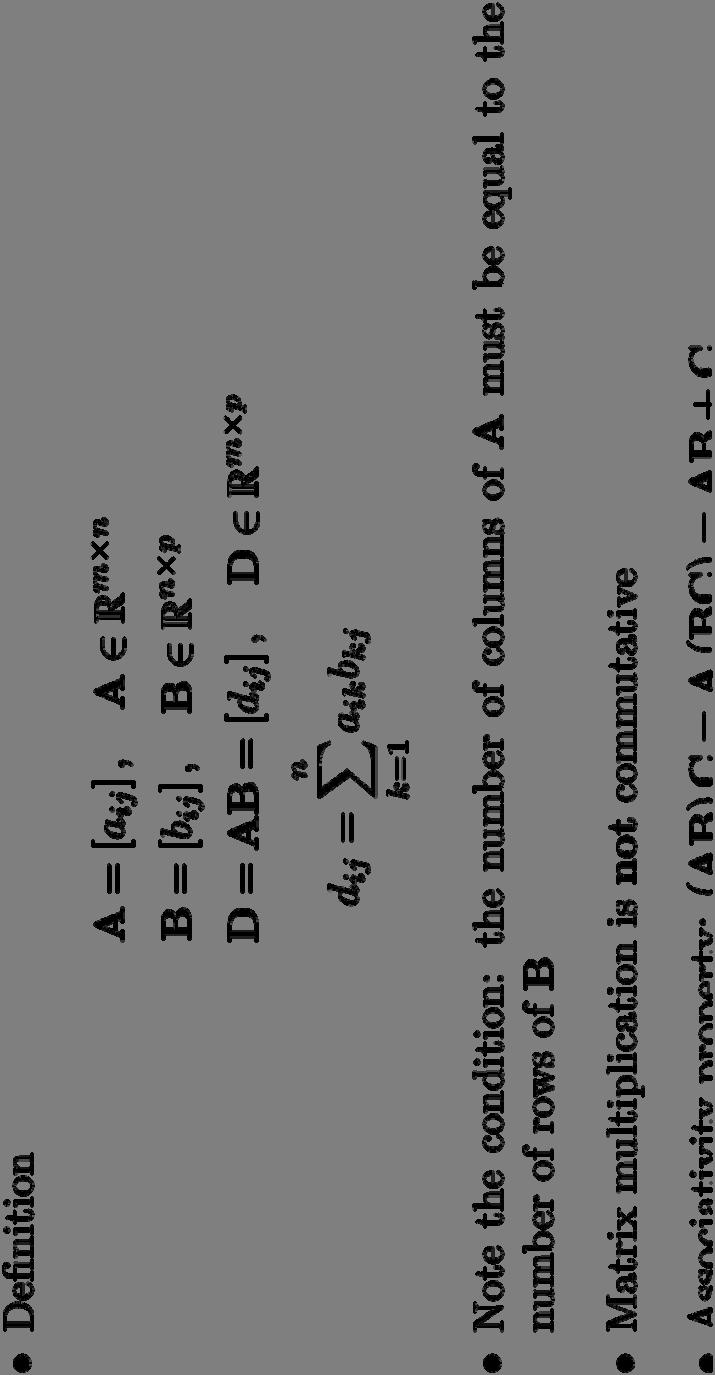
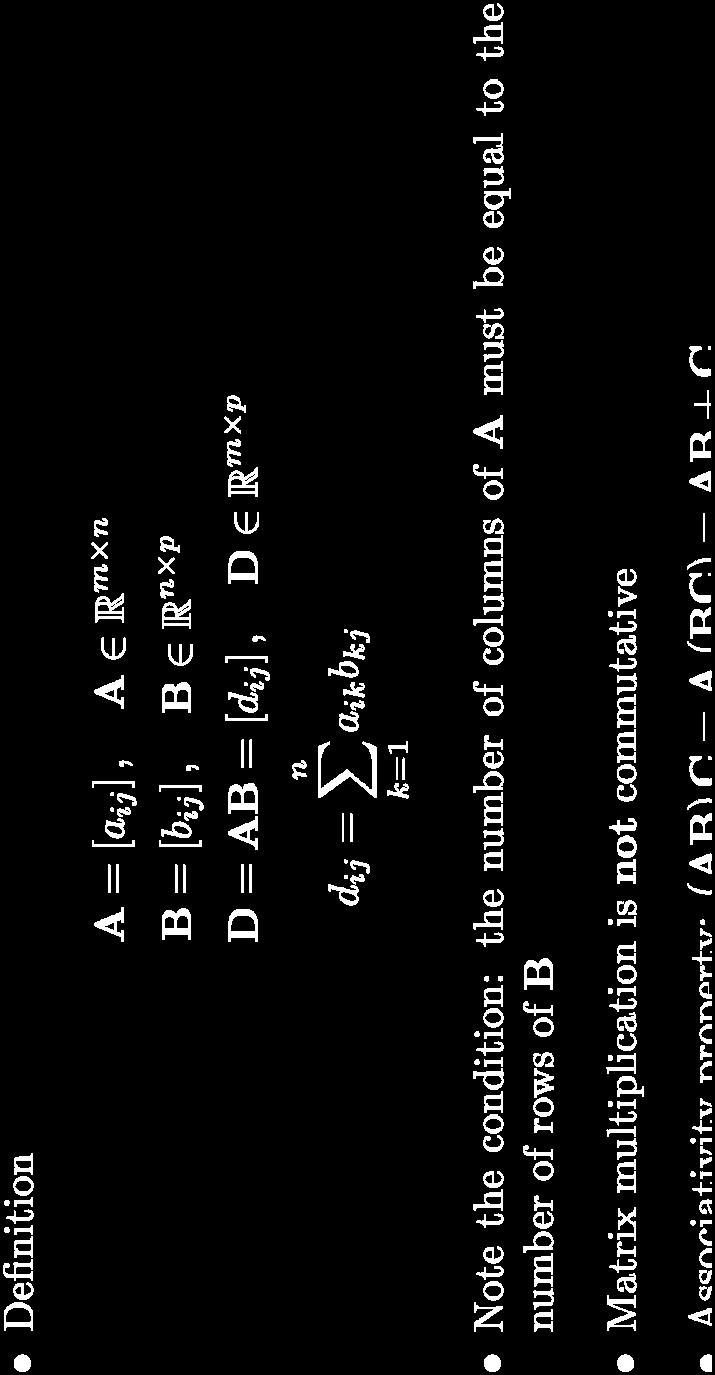
31 Matrix-Matrix Multiplication 31
ME451 Kinematics and Dynamics of Machine Systems
 ME451 Kinematics and Dynamics of Machine Systems Introduction September 2, 2010 Dan Negrut, 2010 ME451, UW-Madison Dan Negrut University of Wisconsin, Madison Before we get started Today: Discuss Syllabus
ME451 Kinematics and Dynamics of Machine Systems Introduction September 2, 2010 Dan Negrut, 2010 ME451, UW-Madison Dan Negrut University of Wisconsin, Madison Before we get started Today: Discuss Syllabus
ME451 Kinematics and Dynamics of Machine Systems
 ME451 Kinematics and Dynamics of Machine Systems Introduction to Dynamics Newmark Integration Formula [not in the textbook] December 9, 2014 Dan Negrut ME451, Fall 2014 University of Wisconsin-Madison
ME451 Kinematics and Dynamics of Machine Systems Introduction to Dynamics Newmark Integration Formula [not in the textbook] December 9, 2014 Dan Negrut ME451, Fall 2014 University of Wisconsin-Madison
ME451 Kinematics and Dynamics of Machine Systems
 ME451 Kinematics and Dynamics of Machine Systems Introduction to Dynamics 6.3.4, 6.6 November 25, 2014 Dan Negrut ME451, Fall 2014 University of Wisconsin-Madison Quote of the day: Marge, don't discourage
ME451 Kinematics and Dynamics of Machine Systems Introduction to Dynamics 6.3.4, 6.6 November 25, 2014 Dan Negrut ME451, Fall 2014 University of Wisconsin-Madison Quote of the day: Marge, don't discourage
ME451 Kinematics and Dynamics of Machine Systems
 ME451 Kinematics and Dynamics of Machine Systems Introduction to Dynamics 6.1 October 30, 2014 Dan Negrut ME451, Fall 2014 University of Wisconsin-Madison Quote of the day: Computer science education cannot
ME451 Kinematics and Dynamics of Machine Systems Introduction to Dynamics 6.1 October 30, 2014 Dan Negrut ME451, Fall 2014 University of Wisconsin-Madison Quote of the day: Computer science education cannot
ME751 Advanced Computational Multibody Dynamics
 ME751 Advanced Computational Multibody Dynamics Review: Elements of Linear Algebra & Calculus September 9, 2016 Dan Negrut University of Wisconsin-Madison Quote of the day If you can't convince them, confuse
ME751 Advanced Computational Multibody Dynamics Review: Elements of Linear Algebra & Calculus September 9, 2016 Dan Negrut University of Wisconsin-Madison Quote of the day If you can't convince them, confuse
ME751 Advanced Computational Multibody Dynamics
 ME751 Advanced Computational Multibody Dynamics Section 9.2 September 16, 2016 Dan Negrut University of Wisconsin-Madison Quote of the day I only believe in statistics that I doctored myself. -- Sir Winston
ME751 Advanced Computational Multibody Dynamics Section 9.2 September 16, 2016 Dan Negrut University of Wisconsin-Madison Quote of the day I only believe in statistics that I doctored myself. -- Sir Winston
ME451 Kinematics and Dynamics of Machine Systems
 ME451 Kinematics and Dynamics of Machine Systems Introduction to Dynamics 6.1 November 6, 2014 Dan Negrut ME451, Fall 2014 University of Wisconsin-Madison Quote of the day: I have never let my schooling
ME451 Kinematics and Dynamics of Machine Systems Introduction to Dynamics 6.1 November 6, 2014 Dan Negrut ME451, Fall 2014 University of Wisconsin-Madison Quote of the day: I have never let my schooling
ME451 Kinematics and Dynamics of Machine Systems
 ME451 Kinematics and Dynamics of Machine Systems Introduction to Dynamics 6.1 November 11, 2014 Dan Negrut ME451, Fall 2014 University of Wisconsin-Madison Quote of the day: Noise makes little good; good
ME451 Kinematics and Dynamics of Machine Systems Introduction to Dynamics 6.1 November 11, 2014 Dan Negrut ME451, Fall 2014 University of Wisconsin-Madison Quote of the day: Noise makes little good; good
ME751 Advanced Computational Multibody Dynamics. September 14, 2016
 ME751 Advanced Computational Multibody Dynamics September 14, 2016 Quote of the Day My own business always bores me to death; I prefer other people's. -- Oscar Wilde 2 Looking Ahead, Friday Need to wrap
ME751 Advanced Computational Multibody Dynamics September 14, 2016 Quote of the Day My own business always bores me to death; I prefer other people's. -- Oscar Wilde 2 Looking Ahead, Friday Need to wrap
General Theoretical Concepts Related to Multibody Dynamics
 General Theoretical Concepts Related to Multibody Dynamics Before Getting Started Material draws on two main sources Ed Haug s book, available online: http://sbel.wisc.edu/courses/me751/2010/bookhaugpointers.htm
General Theoretical Concepts Related to Multibody Dynamics Before Getting Started Material draws on two main sources Ed Haug s book, available online: http://sbel.wisc.edu/courses/me751/2010/bookhaugpointers.htm
Math (P)Review Part II:
Review Part II:") Math (P)Review Part II: Vector Calculus Computer Graphics Assignment 0.5 (Out today!) Same story as last homework; second part on vector calculus. Slightly fewer questions Last Time: Linear Algebra Touched
Math (P)Review Part II: Vector Calculus Computer Graphics Assignment 0.5 (Out today!) Same story as last homework; second part on vector calculus. Slightly fewer questions Last Time: Linear Algebra Touched
Math (P)Review Part I:
Review Part I:") Lecture 1: Math (P)Review Part I: Linear Algebra Computer Graphics CMU 15-462/15-662, Fall 2017 Homework 0.0 (Due Monday!) Exercises will be a bit harder / more rigorous than what you will do for the rest
Lecture 1: Math (P)Review Part I: Linear Algebra Computer Graphics CMU 15-462/15-662, Fall 2017 Homework 0.0 (Due Monday!) Exercises will be a bit harder / more rigorous than what you will do for the rest
ME451 Kinematics and Dynamics of Machine Systems
 ME451 Kinematics and Dynamics of Machine Systems Newton-Raphson Method 4.5 Closing remarks, Kinematics Analysis October 25, 2010 Dan Negrut, 2011 ME451, UW-Madison Success is going from failure to failure
ME451 Kinematics and Dynamics of Machine Systems Newton-Raphson Method 4.5 Closing remarks, Kinematics Analysis October 25, 2010 Dan Negrut, 2011 ME451, UW-Madison Success is going from failure to failure
MATH 12 CLASS 2 NOTES, SEP Contents. 2. Dot product: determining the angle between two vectors 2
 MATH 12 CLASS 2 NOTES, SEP 23 2011 Contents 1. Dot product: definition, basic properties 1 2. Dot product: determining the angle between two vectors 2 Quick links to definitions/theorems Dot product definition
MATH 12 CLASS 2 NOTES, SEP 23 2011 Contents 1. Dot product: definition, basic properties 1 2. Dot product: determining the angle between two vectors 2 Quick links to definitions/theorems Dot product definition
ME751 Advanced Computational Multibody Dynamics
 ME751 Advanced Computational Multibody Dynamics October 7, 2016 Dan Negrut University of Wisconsin-Madison Quotes of the Day [from Samuel] There will come a time when you believe everything is finished.
ME751 Advanced Computational Multibody Dynamics October 7, 2016 Dan Negrut University of Wisconsin-Madison Quotes of the Day [from Samuel] There will come a time when you believe everything is finished.
Vectors. Advanced Math Circle. October 18, 2018
 Vectors Advanced Math Circle October 18, 2018 Today we are going to spend some time studying vectors. Vectors are not only ubiquitous in math, and also used a lot in physics and engineering. Vectors are
Vectors Advanced Math Circle October 18, 2018 Today we are going to spend some time studying vectors. Vectors are not only ubiquitous in math, and also used a lot in physics and engineering. Vectors are
Mechanics, Heat, Oscillations and Waves Prof. V. Balakrishnan Department of Physics Indian Institute of Technology, Madras
 Mechanics, Heat, Oscillations and Waves Prof. V. Balakrishnan Department of Physics Indian Institute of Technology, Madras Lecture 08 Vectors in a Plane, Scalars & Pseudoscalers Let us continue today with
Mechanics, Heat, Oscillations and Waves Prof. V. Balakrishnan Department of Physics Indian Institute of Technology, Madras Lecture 08 Vectors in a Plane, Scalars & Pseudoscalers Let us continue today with
Dot Products, Transposes, and Orthogonal Projections
 Dot Products, Transposes, and Orthogonal Projections David Jekel November 13, 2015 Properties of Dot Products Recall that the dot product or standard inner product on R n is given by x y = x 1 y 1 + +
Dot Products, Transposes, and Orthogonal Projections David Jekel November 13, 2015 Properties of Dot Products Recall that the dot product or standard inner product on R n is given by x y = x 1 y 1 + +
1 Review of the dot product
 Any typographical or other corrections about these notes are welcome. Review of the dot product The dot product on R n is an operation that takes two vectors and returns a number. It is defined by n u
Any typographical or other corrections about these notes are welcome. Review of the dot product The dot product on R n is an operation that takes two vectors and returns a number. It is defined by n u
Overview of vector calculus. Coordinate systems in space. Distance formula. (Sec. 12.1)
") Math 20C Multivariable Calculus Lecture 1 1 Coordinates in space Slide 1 Overview of vector calculus. Coordinate systems in space. Distance formula. (Sec. 12.1) Vector calculus studies derivatives and
Math 20C Multivariable Calculus Lecture 1 1 Coordinates in space Slide 1 Overview of vector calculus. Coordinate systems in space. Distance formula. (Sec. 12.1) Vector calculus studies derivatives and
Vector Operations Quick Look (*Draft )
") Vector Operations Quick Look (*Draft 2009-08-14) The intent of this tutorial is to provide minimal background for working with vectors and vector spaces, with a view to ultimately understanding statistical
Vector Operations Quick Look (*Draft 2009-08-14) The intent of this tutorial is to provide minimal background for working with vectors and vector spaces, with a view to ultimately understanding statistical
Definition of geometric vectors
 Roberto s Notes on Linear Algebra Chapter 1: Geometric vectors Section 2 of geometric vectors What you need to know already: The general aims behind the concept of a vector. What you can learn here: The
Roberto s Notes on Linear Algebra Chapter 1: Geometric vectors Section 2 of geometric vectors What you need to know already: The general aims behind the concept of a vector. What you can learn here: The
Vectors for Beginners
 Vectors for Beginners Leo Dorst September 6, 2007 1 Three ways of looking at linear algebra We will always try to look at what we do in linear algebra at three levels: geometric: drawing a picture. This
Vectors for Beginners Leo Dorst September 6, 2007 1 Three ways of looking at linear algebra We will always try to look at what we do in linear algebra at three levels: geometric: drawing a picture. This
Review of Coordinate Systems
 Vector in 2 R and 3 R Review of Coordinate Systems Used to describe the position of a point in space Common coordinate systems are: Cartesian Polar Cartesian Coordinate System Also called rectangular coordinate
Vector in 2 R and 3 R Review of Coordinate Systems Used to describe the position of a point in space Common coordinate systems are: Cartesian Polar Cartesian Coordinate System Also called rectangular coordinate
Lecture 2: Linear regression
 Lecture 2: Linear regression Roger Grosse 1 Introduction Let s ump right in and look at our first machine learning algorithm, linear regression. In regression, we are interested in predicting a scalar-valued
Lecture 2: Linear regression Roger Grosse 1 Introduction Let s ump right in and look at our first machine learning algorithm, linear regression. In regression, we are interested in predicting a scalar-valued
Physics 351 Wednesday, January 10, 2018
 Physics 351 Wednesday, January 10, 2018 Chapers 1 5 mostly review freshman physics, so we ll go through them very quickly in the first few days of class. Read Chapters 1+2 for Friday. Read Chapter 3 (momentum
Physics 351 Wednesday, January 10, 2018 Chapers 1 5 mostly review freshman physics, so we ll go through them very quickly in the first few days of class. Read Chapters 1+2 for Friday. Read Chapter 3 (momentum
ME451 Kinematics and Dynamics of Machine Systems
 ME451 Kinematics and Dynamics of Machine Systems Cam-Follower Constraints 3.3 Driving Constraints 3.5 October 11, 2011 Dan Negrut, 2011 ME451, UW-Madison "Computers are useless. They can only give you
ME451 Kinematics and Dynamics of Machine Systems Cam-Follower Constraints 3.3 Driving Constraints 3.5 October 11, 2011 Dan Negrut, 2011 ME451, UW-Madison "Computers are useless. They can only give you
Electrostatics. Now we have finished our discussion on transmission line theory.
 Electrostatics Now we have finished our discussion on transmission line theory. The transmission line theory deals with a special type of waveguides, where there are two conductors. As such, you can define
Electrostatics Now we have finished our discussion on transmission line theory. The transmission line theory deals with a special type of waveguides, where there are two conductors. As such, you can define
(arrows denote positive direction)
") 12 Chapter 12 12.1 3-dimensional Coordinate System The 3-dimensional coordinate system we use are coordinates on R 3. The coordinate is presented as a triple of numbers: (a,b,c). In the Cartesian coordinate
12 Chapter 12 12.1 3-dimensional Coordinate System The 3-dimensional coordinate system we use are coordinates on R 3. The coordinate is presented as a triple of numbers: (a,b,c). In the Cartesian coordinate
MATH 320, WEEK 6: Linear Systems, Gaussian Elimination, Coefficient Matrices
 MATH 320, WEEK 6: Linear Systems, Gaussian Elimination, Coefficient Matrices We will now switch gears and focus on a branch of mathematics known as linear algebra. There are a few notes worth making before
MATH 320, WEEK 6: Linear Systems, Gaussian Elimination, Coefficient Matrices We will now switch gears and focus on a branch of mathematics known as linear algebra. There are a few notes worth making before
Fluid Mechanics Prof. S. K. Som Department of Mechanical Engineering Indian Institute of Technology, Kharagpur
 Fluid Mechanics Prof. S. K. Som Department of Mechanical Engineering Indian Institute of Technology, Kharagpur Lecture - 15 Conservation Equations in Fluid Flow Part III Good afternoon. I welcome you all
Fluid Mechanics Prof. S. K. Som Department of Mechanical Engineering Indian Institute of Technology, Kharagpur Lecture - 15 Conservation Equations in Fluid Flow Part III Good afternoon. I welcome you all
ME751 Advanced Computational Multibody Dynamics
 ME751 Advanced Computational Multibody Dynamics Inverse Dynamics Equilibrium Analysis Various Odd Ends March 18, 2010 Dan Negrut, 2010 ME751, UW-Madison Action speaks louder than words but not nearly as
ME751 Advanced Computational Multibody Dynamics Inverse Dynamics Equilibrium Analysis Various Odd Ends March 18, 2010 Dan Negrut, 2010 ME751, UW-Madison Action speaks louder than words but not nearly as
Matrix Algebra: Vectors
 A Matrix Algebra: Vectors A Appendix A: MATRIX ALGEBRA: VECTORS A 2 A MOTIVATION Matrix notation was invented primarily to express linear algebra relations in compact form Compactness enhances visualization
A Matrix Algebra: Vectors A Appendix A: MATRIX ALGEBRA: VECTORS A 2 A MOTIVATION Matrix notation was invented primarily to express linear algebra relations in compact form Compactness enhances visualization
(But, they are entirely separate branches of mathematics.)
") 2 You ve heard of statistics to deal with problems of uncertainty and differential equations to describe the rates of change of physical systems. In this section, you will learn about two more: vector
2 You ve heard of statistics to deal with problems of uncertainty and differential equations to describe the rates of change of physical systems. In this section, you will learn about two more: vector
Alex s Guide to Word Problems and Linear Equations Following Glencoe Algebra 1
 Alex s Guide to Word Problems and Linear Equations Following Glencoe Algebra 1 What is a linear equation? It sounds fancy, but linear equation means the same thing as a line. In other words, it s an equation
Alex s Guide to Word Problems and Linear Equations Following Glencoe Algebra 1 What is a linear equation? It sounds fancy, but linear equation means the same thing as a line. In other words, it s an equation
How to Simulate a Trebuchet Part 1: Lagrange s Equations
 Pivot Arm Counterweight Hook Base Sling Projectile How to Simulate a Trebuchet Part 1: Lagrange s Equations The trebuchet has quickly become a favorite project for physics and engineering teachers seeking
Pivot Arm Counterweight Hook Base Sling Projectile How to Simulate a Trebuchet Part 1: Lagrange s Equations The trebuchet has quickly become a favorite project for physics and engineering teachers seeking
Vectors and Equilibrium Lecture 3
 Vectors and Equilibrium Lecture 3 ˆ Last week we spent time discussing some basic tools to analyze the motion of the simplest of all systems: the particle. ˆ This week, we discuss the cause of motion,
Vectors and Equilibrium Lecture 3 ˆ Last week we spent time discussing some basic tools to analyze the motion of the simplest of all systems: the particle. ˆ This week, we discuss the cause of motion,
Math 416, Spring 2010 More on Algebraic and Geometric Properties January 21, 2010 MORE ON ALGEBRAIC AND GEOMETRIC PROPERTIES
 Math 46, Spring 2 More on Algebraic and Geometric Properties January 2, 2 MORE ON ALGEBRAIC AND GEOMETRIC PROPERTIES Algebraic properties Algebraic properties of matrix/vector multiplication Last time
Math 46, Spring 2 More on Algebraic and Geometric Properties January 2, 2 MORE ON ALGEBRAIC AND GEOMETRIC PROPERTIES Algebraic properties Algebraic properties of matrix/vector multiplication Last time
(1) Recap of Differential Calculus and Integral Calculus (2) Preview of Calculus in three dimensional space (3) Tools for Calculus 3
 Recap of Differential Calculus and Integral Calculus (2) Preview of Calculus in three dimensional space (3) Tools for Calculus 3") Math 127 Introduction and Review (1) Recap of Differential Calculus and Integral Calculus (2) Preview of Calculus in three dimensional space (3) Tools for Calculus 3 MATH 127 Introduction to Calculus III
Math 127 Introduction and Review (1) Recap of Differential Calculus and Integral Calculus (2) Preview of Calculus in three dimensional space (3) Tools for Calculus 3 MATH 127 Introduction to Calculus III
Fairfield Public Schools
 Mathematics Fairfield Public Schools PRE-CALCULUS 40 Pre-Calculus 40 BOE Approved 04/08/2014 1 PRE-CALCULUS 40 Critical Areas of Focus Pre-calculus combines the trigonometric, geometric, and algebraic
Mathematics Fairfield Public Schools PRE-CALCULUS 40 Pre-Calculus 40 BOE Approved 04/08/2014 1 PRE-CALCULUS 40 Critical Areas of Focus Pre-calculus combines the trigonometric, geometric, and algebraic
The geometry of least squares
 The geometry of least squares We can think of a vector as a point in space, where the elements of the vector are the coordinates of the point. Consider for example, the following vector s: t = ( 4, 0),
The geometry of least squares We can think of a vector as a point in space, where the elements of the vector are the coordinates of the point. Consider for example, the following vector s: t = ( 4, 0),
Lecture 2 - Force Analysis
 Lecture 2 - orce Analysis A Puzzle... Triangle or quadrilateral? 4 distinct points in a plane can either be arrange as a triangle with a point inside or as a quadrilateral. Extra Brownie Points: Use the
Lecture 2 - orce Analysis A Puzzle... Triangle or quadrilateral? 4 distinct points in a plane can either be arrange as a triangle with a point inside or as a quadrilateral. Extra Brownie Points: Use the
MATH1014. Semester 1 Administrative Overview. Neil Montgomery calculus
 MATH1014 Semester 1 Administrative Overview Lecturers: Scott Morrison linear algebra scott.morrison@anu.edu.au Neil Montgomery calculus neil.montgomery@anu.edu.au Dr Scott Morrison (ANU) MATH1014 Notes
MATH1014 Semester 1 Administrative Overview Lecturers: Scott Morrison linear algebra scott.morrison@anu.edu.au Neil Montgomery calculus neil.montgomery@anu.edu.au Dr Scott Morrison (ANU) MATH1014 Notes
Module 3: Cartesian Coordinates and Vectors
 Module 3: Cartesian Coordinates and Vectors Philosophy is written in this grand book, the universe which stands continually open to our gaze. But the book cannot be understood unless one first learns to
Module 3: Cartesian Coordinates and Vectors Philosophy is written in this grand book, the universe which stands continually open to our gaze. But the book cannot be understood unless one first learns to
Statics. Introductions Review Course Outline and Class Schedule Course Expectations Chapter 1
 Statics ENGR 1205 Kaitlin Ford kford@mtroyal.ca B175 Today Introductions Review Course Outline and Class Schedule Course Expectations Chapter 1 1 Review the Course Outline and Class Schedule Go through
Statics ENGR 1205 Kaitlin Ford kford@mtroyal.ca B175 Today Introductions Review Course Outline and Class Schedule Course Expectations Chapter 1 1 Review the Course Outline and Class Schedule Go through
Rigid Geometric Transformations
 Rigid Geometric Transformations Carlo Tomasi This note is a quick refresher of the geometry of rigid transformations in three-dimensional space, expressed in Cartesian coordinates. 1 Cartesian Coordinates
Rigid Geometric Transformations Carlo Tomasi This note is a quick refresher of the geometry of rigid transformations in three-dimensional space, expressed in Cartesian coordinates. 1 Cartesian Coordinates
CSC321 Lecture 2: Linear Regression
 CSC32 Lecture 2: Linear Regression Roger Grosse Roger Grosse CSC32 Lecture 2: Linear Regression / 26 Overview First learning algorithm of the course: linear regression Task: predict scalar-valued targets,
CSC32 Lecture 2: Linear Regression Roger Grosse Roger Grosse CSC32 Lecture 2: Linear Regression / 26 Overview First learning algorithm of the course: linear regression Task: predict scalar-valued targets,
MECHANICS, UNITS, NUMERICAL CALCULATIONS & GENERAL PROCEDURE FOR ANALYSIS
 MECHANICS, UNITS, NUMERICAL CALCULATIONS & GENERAL PROCEDURE FOR ANALYSIS Today s Objectives: Students will be able to: In-Class activities: a) Explain mechanics / statics. Reading Quiz b) Work with two
MECHANICS, UNITS, NUMERICAL CALCULATIONS & GENERAL PROCEDURE FOR ANALYSIS Today s Objectives: Students will be able to: In-Class activities: a) Explain mechanics / statics. Reading Quiz b) Work with two
Welcome to IB Math - Standard Level Year 2
 Welcome to IB Math - Standard Level Year 2 Why math? Not So Some things to know: Good HW Good HW Good HW www.aleimath.blogspot.com Example 1. Lots of info at Example Example 2. HW yup. You know you love
Welcome to IB Math - Standard Level Year 2 Why math? Not So Some things to know: Good HW Good HW Good HW www.aleimath.blogspot.com Example 1. Lots of info at Example Example 2. HW yup. You know you love
Designing Information Devices and Systems I Fall 2018 Lecture Notes Note 21
 EECS 16A Designing Information Devices and Systems I Fall 2018 Lecture Notes Note 21 21.1 Module Goals In this module, we introduce a family of ideas that are connected to optimization and machine learning,
EECS 16A Designing Information Devices and Systems I Fall 2018 Lecture Notes Note 21 21.1 Module Goals In this module, we introduce a family of ideas that are connected to optimization and machine learning,
HOW TO THINK ABOUT POINTS AND VECTORS WITHOUT COORDINATES. Math 225
 HOW TO THINK ABOUT POINTS AND VECTORS WITHOUT COORDINATES Math 225 Points Look around. What do you see? You see objects: a chair here, a table there, a book on the table. These objects occupy locations,
HOW TO THINK ABOUT POINTS AND VECTORS WITHOUT COORDINATES Math 225 Points Look around. What do you see? You see objects: a chair here, a table there, a book on the table. These objects occupy locations,
CE-570 Advanced Structural Mechanics - Arun Prakash
 Ch1-Intro Page 1 CE-570 Advanced Structural Mechanics - Arun Prakash The BIG Picture What is Mechanics? Mechanics is study of how things work: how anything works, how the world works! People ask: "Do you
Ch1-Intro Page 1 CE-570 Advanced Structural Mechanics - Arun Prakash The BIG Picture What is Mechanics? Mechanics is study of how things work: how anything works, how the world works! People ask: "Do you
Chapter 5: Forces in Equilibrium
 Chapter 5: Forces in Equilibrium I don't know what I may seem to the world, but, as to myself, I seem to have been only like a boy playing on the sea shore, and diverting myself in now and then finding
Chapter 5: Forces in Equilibrium I don't know what I may seem to the world, but, as to myself, I seem to have been only like a boy playing on the sea shore, and diverting myself in now and then finding
Announcements August 31
 Announcements August 31 Homeworks 1.1 and 1.2 are due Friday. The first quiz is on Friday, during recitation. Quizzes mostly test your understanding of the homework. There will generally be a quiz every
Announcements August 31 Homeworks 1.1 and 1.2 are due Friday. The first quiz is on Friday, during recitation. Quizzes mostly test your understanding of the homework. There will generally be a quiz every
Welcome to IB Math - Standard Level Year 2.
 Welcome to IB Math - Standard Level Year 2 Why math? Some things to know: www.aleimath.blogspot.com 1. Lots of info at 2. HW yup. You know you love it! Be prepared to present. Notebook all work is in it.
Welcome to IB Math - Standard Level Year 2 Why math? Some things to know: www.aleimath.blogspot.com 1. Lots of info at 2. HW yup. You know you love it! Be prepared to present. Notebook all work is in it.
Robotics: Tutorial 3
 Robotics: Tutorial 3 Mechatronics Engineering Dr. Islam Khalil, MSc. Omar Mahmoud, Eng. Lobna Tarek and Eng. Abdelrahman Ezz German University in Cairo Faculty of Engineering and Material Science October
Robotics: Tutorial 3 Mechatronics Engineering Dr. Islam Khalil, MSc. Omar Mahmoud, Eng. Lobna Tarek and Eng. Abdelrahman Ezz German University in Cairo Faculty of Engineering and Material Science October
Vectors. Representations: Vectors. Instructor s Guide. Table of Contents
 Vectors Representations Series Instructor s Guide Table of duction.... 2 When to Use this Video.... 2 Learning Objectives.... 2 Motivation.... 2 Student Experience.... 2 Key Information.... 2 Video Highlights....
Vectors Representations Series Instructor s Guide Table of duction.... 2 When to Use this Video.... 2 Learning Objectives.... 2 Motivation.... 2 Student Experience.... 2 Key Information.... 2 Video Highlights....
2 Systems of Linear Equations
 2 Systems of Linear Equations A system of equations of the form or is called a system of linear equations. x + 2y = 7 2x y = 4 5p 6q + r = 4 2p + 3q 5r = 7 6p q + 4r = 2 Definition. An equation involving
2 Systems of Linear Equations A system of equations of the form or is called a system of linear equations. x + 2y = 7 2x y = 4 5p 6q + r = 4 2p + 3q 5r = 7 6p q + 4r = 2 Definition. An equation involving
MAT 211, Spring 2015, Introduction to Linear Algebra.
 MAT 211, Spring 2015, Introduction to Linear Algebra. Lecture 04, 53103: MWF 10-10:53 AM. Location: Library W4535 Contact: mtehrani@scgp.stonybrook.edu Final Exam: Monday 5/18/15 8:00 AM-10:45 AM The aim
MAT 211, Spring 2015, Introduction to Linear Algebra. Lecture 04, 53103: MWF 10-10:53 AM. Location: Library W4535 Contact: mtehrani@scgp.stonybrook.edu Final Exam: Monday 5/18/15 8:00 AM-10:45 AM The aim
Dot Products. K. Behrend. April 3, Abstract A short review of some basic facts on the dot product. Projections. The spectral theorem.
 Dot Products K. Behrend April 3, 008 Abstract A short review of some basic facts on the dot product. Projections. The spectral theorem. Contents The dot product 3. Length of a vector........................
Dot Products K. Behrend April 3, 008 Abstract A short review of some basic facts on the dot product. Projections. The spectral theorem. Contents The dot product 3. Length of a vector........................
Lecture Schedule Week Date Lecture (M: 2:05p-3:50, 50-N202)
") J = x θ τ = J T F 2018 School of Information Technology and Electrical Engineering at the University of Queensland Lecture Schedule Week Date Lecture (M: 2:05p-3:50, 50-N202) 1 23-Jul Introduction + Representing
J = x θ τ = J T F 2018 School of Information Technology and Electrical Engineering at the University of Queensland Lecture Schedule Week Date Lecture (M: 2:05p-3:50, 50-N202) 1 23-Jul Introduction + Representing
Vectors. Representations: Vectors. Instructor s Guide. Table of Contents
 Vectors Representations Series Instructor s Guide Table of duction.... 2 When to Use this Video.... 2 Learning Objectives.... 2 Motivation.... 2 Student Experience.... 2 Key Information.... 2 Video Highlights....
Vectors Representations Series Instructor s Guide Table of duction.... 2 When to Use this Video.... 2 Learning Objectives.... 2 Motivation.... 2 Student Experience.... 2 Key Information.... 2 Video Highlights....
Vector Algebra II: Scalar and Vector Products
 Chapter 2 Vector Algebra II: Scalar and Vector Products We saw in the previous chapter how vector quantities may be added and subtracted. In this chapter we consider the products of vectors and define
Chapter 2 Vector Algebra II: Scalar and Vector Products We saw in the previous chapter how vector quantities may be added and subtracted. In this chapter we consider the products of vectors and define
7.6 Additional Problems
 7in x 10in Felder c07_online.tex V3 - January 21, 2015 10:11 A.M. Page 26 26 Chapter 7 Linear Algebra II (nline) 7.6 Additional Problems 7.137 The picture below shows a rubber sheet with three small stones
7in x 10in Felder c07_online.tex V3 - January 21, 2015 10:11 A.M. Page 26 26 Chapter 7 Linear Algebra II (nline) 7.6 Additional Problems 7.137 The picture below shows a rubber sheet with three small stones
Announcements Monday, September 18
 Announcements Monday, September 18 WeBWorK 1.4, 1.5 are due on Wednesday at 11:59pm. The first midterm is on this Friday, September 22. Midterms happen during recitation. The exam covers through 1.5. About
Announcements Monday, September 18 WeBWorK 1.4, 1.5 are due on Wednesday at 11:59pm. The first midterm is on this Friday, September 22. Midterms happen during recitation. The exam covers through 1.5. About
Course Notes Math 275 Boise State University. Shari Ultman
 Course Notes Math 275 Boise State University Shari Ultman Fall 2017 Contents 1 Vectors 1 1.1 Introduction to 3-Space & Vectors.............. 3 1.2 Working With Vectors.................... 7 1.3 Introduction
Course Notes Math 275 Boise State University Shari Ultman Fall 2017 Contents 1 Vectors 1 1.1 Introduction to 3-Space & Vectors.............. 3 1.2 Working With Vectors.................... 7 1.3 Introduction
Lecture 3 Math & Probability Background
 Lecture 3 Math & Probability Background ch. 1-2 of Machine Vision by Wesley E. Snyder & Hairong Qi Spring 2019 16-725 (CMU RI) : BioE 2630 (Pitt) Dr. John Galeotti The content of these slides by John Galeotti,
Lecture 3 Math & Probability Background ch. 1-2 of Machine Vision by Wesley E. Snyder & Hairong Qi Spring 2019 16-725 (CMU RI) : BioE 2630 (Pitt) Dr. John Galeotti The content of these slides by John Galeotti,
Rigid Geometric Transformations
 Rigid Geometric Transformations Carlo Tomasi This note is a quick refresher of the geometry of rigid transformations in three-dimensional space, expressed in Cartesian coordinates. 1 Cartesian Coordinates
Rigid Geometric Transformations Carlo Tomasi This note is a quick refresher of the geometry of rigid transformations in three-dimensional space, expressed in Cartesian coordinates. 1 Cartesian Coordinates
STATICS & DYNAMICS. Engineering Mechanics. Gary L. Gray. Francesco Costanzo. Michael E. Plesha. University of Wisconsin-Madison
 Engineering Mechanics STATICS & DYNAMICS SECOND EDITION Francesco Costanzo Department of Engineering Science and Mechanics Penn State University Michael E. Plesha Department of Engineering Physics University
Engineering Mechanics STATICS & DYNAMICS SECOND EDITION Francesco Costanzo Department of Engineering Science and Mechanics Penn State University Michael E. Plesha Department of Engineering Physics University
(W: 12:05-1:50, 50-N202)
") 2016 School of Information Technology and Electrical Engineering at the University of Queensland Schedule of Events Week Date Lecture (W: 12:05-1:50, 50-N202) 1 27-Jul Introduction 2 Representing Position
2016 School of Information Technology and Electrical Engineering at the University of Queensland Schedule of Events Week Date Lecture (W: 12:05-1:50, 50-N202) 1 27-Jul Introduction 2 Representing Position
Gauss s law for electric fields
 1 Gauss s law for electric fields In Maxwell s Equations, you ll encounter two kinds of electric field: the electrostatic field produced by electric charge and the induced electric field produced by a
1 Gauss s law for electric fields In Maxwell s Equations, you ll encounter two kinds of electric field: the electrostatic field produced by electric charge and the induced electric field produced by a
Chapter 1. Preliminaries
 Chapter 1 Preliminaries 1.1 The Vector Concept Revisited The concept of a vector has been one of the most fruitful ideas in all of mathematics, and it is not surprising that we receive repeated exposure
Chapter 1 Preliminaries 1.1 The Vector Concept Revisited The concept of a vector has been one of the most fruitful ideas in all of mathematics, and it is not surprising that we receive repeated exposure
Several Things to Talk about
 A slide from a previous class note Several Things to Talk about Homework Previous student comments: I prefer HW assignments to be mandatory. That way I'm forced to do it and learn. I was good about doing
A slide from a previous class note Several Things to Talk about Homework Previous student comments: I prefer HW assignments to be mandatory. That way I'm forced to do it and learn. I was good about doing
the gamedesigninitiative at cornell university Lecture 17 Physics and Motion
 Lecture 17 The Pedagogical Problem Physics simulation is a very complex topic No way I can address this in a few lectures Could spend an entire course talking about it CS 5643: Physically Based Animation
Lecture 17 The Pedagogical Problem Physics simulation is a very complex topic No way I can address this in a few lectures Could spend an entire course talking about it CS 5643: Physically Based Animation
Math 31 Lesson Plan. Day 5: Intro to Groups. Elizabeth Gillaspy. September 28, 2011
 Math 31 Lesson Plan Day 5: Intro to Groups Elizabeth Gillaspy September 28, 2011 Supplies needed: Sign in sheet Goals for students: Students will: Improve the clarity of their proof-writing. Gain confidence
Math 31 Lesson Plan Day 5: Intro to Groups Elizabeth Gillaspy September 28, 2011 Supplies needed: Sign in sheet Goals for students: Students will: Improve the clarity of their proof-writing. Gain confidence
This pre-publication material is for review purposes only. Any typographical or technical errors will be corrected prior to publication.
 This pre-publication material is for review purposes only. Any typographical or technical errors will be corrected prior to publication. Copyright Pearson Canada Inc. All rights reserved. Copyright Pearson
This pre-publication material is for review purposes only. Any typographical or technical errors will be corrected prior to publication. Copyright Pearson Canada Inc. All rights reserved. Copyright Pearson
Vector, Matrix, and Tensor Derivatives
 Vector, Matrix, and Tensor Derivatives Erik Learned-Miller The purpose of this document is to help you learn to take derivatives of vectors, matrices, and higher order tensors (arrays with three dimensions
Vector, Matrix, and Tensor Derivatives Erik Learned-Miller The purpose of this document is to help you learn to take derivatives of vectors, matrices, and higher order tensors (arrays with three dimensions
Computational Fluid Dynamics Prof. Dr. Suman Chakraborty Department of Mechanical Engineering Indian Institute of Technology, Kharagpur
 Computational Fluid Dynamics Prof. Dr. Suman Chakraborty Department of Mechanical Engineering Indian Institute of Technology, Kharagpur Lecture No. #12 Fundamentals of Discretization: Finite Volume Method
Computational Fluid Dynamics Prof. Dr. Suman Chakraborty Department of Mechanical Engineering Indian Institute of Technology, Kharagpur Lecture No. #12 Fundamentals of Discretization: Finite Volume Method
Vectors and Coordinate Systems
 Vectors and Coordinate Systems In Newtonian mechanics, we want to understand how material bodies interact with each other and how this affects their motion through space. In order to be able to make quantitative
Vectors and Coordinate Systems In Newtonian mechanics, we want to understand how material bodies interact with each other and how this affects their motion through space. In order to be able to make quantitative
VISUALIZATIONS OF VECTORS, VECTOR-VALUED FUNCTIONS, VECTOR FIELDS, AND LINE INTEGRALS
 VISUALIZATIONS OF VECTORS, VECTOR-VALUED FUNCTIONS, VECTOR FIELDS, AND LINE INTEGRALS Robert E. Kowalczyk and Adam O. Hausknecht University of Massachusetts Dartmouth Mathematics Department, 85 Old Westport
VISUALIZATIONS OF VECTORS, VECTOR-VALUED FUNCTIONS, VECTOR FIELDS, AND LINE INTEGRALS Robert E. Kowalczyk and Adam O. Hausknecht University of Massachusetts Dartmouth Mathematics Department, 85 Old Westport
LINEAR ALGEBRA - CHAPTER 1: VECTORS
 LINEAR ALGEBRA - CHAPTER 1: VECTORS A game to introduce Linear Algebra In measurement, there are many quantities whose description entirely rely on magnitude, i.e., length, area, volume, mass and temperature.
LINEAR ALGEBRA - CHAPTER 1: VECTORS A game to introduce Linear Algebra In measurement, there are many quantities whose description entirely rely on magnitude, i.e., length, area, volume, mass and temperature.
This appendix provides a very basic introduction to linear algebra concepts.
 APPENDIX Basic Linear Algebra Concepts This appendix provides a very basic introduction to linear algebra concepts. Some of these concepts are intentionally presented here in a somewhat simplified (not
APPENDIX Basic Linear Algebra Concepts This appendix provides a very basic introduction to linear algebra concepts. Some of these concepts are intentionally presented here in a somewhat simplified (not
1. Vectors.
 1. Vectors 1.1 Vectors and Matrices Linear algebra is concerned with two basic kinds of quantities: vectors and matrices. 1.1 Vectors and Matrices Scalars and Vectors - Scalar: a numerical value denoted
1. Vectors 1.1 Vectors and Matrices Linear algebra is concerned with two basic kinds of quantities: vectors and matrices. 1.1 Vectors and Matrices Scalars and Vectors - Scalar: a numerical value denoted
Classical Mechanics: From Newtonian to Lagrangian Formulation Prof. Debmalya Banerjee Department of Physics Indian Institute of Technology, Kharagpur
 Classical Mechanics: From Newtonian to Lagrangian Formulation Prof. Debmalya Banerjee Department of Physics Indian Institute of Technology, Kharagpur Lecture - 01 Review of Newtonian mechanics Hello and
Classical Mechanics: From Newtonian to Lagrangian Formulation Prof. Debmalya Banerjee Department of Physics Indian Institute of Technology, Kharagpur Lecture - 01 Review of Newtonian mechanics Hello and
DIFFERENTIAL EQUATIONS
 DIFFERENTIAL EQUATIONS Basic Concepts Paul Dawkins Table of Contents Preface... Basic Concepts... 1 Introduction... 1 Definitions... Direction Fields... 8 Final Thoughts...19 007 Paul Dawkins i http://tutorial.math.lamar.edu/terms.aspx
DIFFERENTIAL EQUATIONS Basic Concepts Paul Dawkins Table of Contents Preface... Basic Concepts... 1 Introduction... 1 Definitions... Direction Fields... 8 Final Thoughts...19 007 Paul Dawkins i http://tutorial.math.lamar.edu/terms.aspx
In the real world, objects don t just move back and forth in 1-D! Projectile
 Phys 1110, 3-1 CH. 3: Vectors In the real world, objects don t just move back and forth in 1-D In principle, the world is really 3-dimensional (3-D), but in practice, lots of realistic motion is 2-D (like
Phys 1110, 3-1 CH. 3: Vectors In the real world, objects don t just move back and forth in 1-D In principle, the world is really 3-dimensional (3-D), but in practice, lots of realistic motion is 2-D (like
Culminating Review for Vectors
 Culminating Review for Vectors 0011 0010 1010 1101 0001 0100 1011 An Introduction to Vectors Applications of Vectors Equations of Lines and Planes 4 12 Relationships between Points, Lines and Planes An
Culminating Review for Vectors 0011 0010 1010 1101 0001 0100 1011 An Introduction to Vectors Applications of Vectors Equations of Lines and Planes 4 12 Relationships between Points, Lines and Planes An
Math 290-2: Linear Algebra & Multivariable Calculus Northwestern University, Lecture Notes
 Math 290-2: Linear Algebra & Multivariable Calculus Northwestern University, Lecture Notes Written by Santiago Cañez These are notes which provide a basic summary of each lecture for Math 290-2, the second
Math 290-2: Linear Algebra & Multivariable Calculus Northwestern University, Lecture Notes Written by Santiago Cañez These are notes which provide a basic summary of each lecture for Math 290-2, the second
The Gram-Schmidt Process
 The Gram-Schmidt Process How and Why it Works This is intended as a complement to 5.4 in our textbook. I assume you have read that section, so I will not repeat the definitions it gives. Our goal is to
The Gram-Schmidt Process How and Why it Works This is intended as a complement to 5.4 in our textbook. I assume you have read that section, so I will not repeat the definitions it gives. Our goal is to
Vector Algebra II: Scalar and Vector Products
 Chapter 2 Vector Algebra II: Scalar and Vector Products ------------------- 2 a b = 0, φ = 90 The vectors are perpendicular to each other 49 Check the result geometrically by completing the diagram a =(4,
Chapter 2 Vector Algebra II: Scalar and Vector Products ------------------- 2 a b = 0, φ = 90 The vectors are perpendicular to each other 49 Check the result geometrically by completing the diagram a =(4,
The Cycloid. and the Kinematic Circumference. by Miles Mathis
 return to updates The Cycloid and the Kinematic Circumference First published August 31, 2016 by Miles Mathis Those of you who have read my papers on π=4 will know I have explained that problem using many
return to updates The Cycloid and the Kinematic Circumference First published August 31, 2016 by Miles Mathis Those of you who have read my papers on π=4 will know I have explained that problem using many
Numerical Methods for Inverse Kinematics
 Numerical Methods for Inverse Kinematics Niels Joubert, UC Berkeley, CS184 2008-11-25 Inverse Kinematics is used to pose models by specifying endpoints of segments rather than individual joint angles.
Numerical Methods for Inverse Kinematics Niels Joubert, UC Berkeley, CS184 2008-11-25 Inverse Kinematics is used to pose models by specifying endpoints of segments rather than individual joint angles.
CSC321 Lecture 5 Learning in a Single Neuron
 CSC321 Lecture 5 Learning in a Single Neuron Roger Grosse and Nitish Srivastava January 21, 2015 Roger Grosse and Nitish Srivastava CSC321 Lecture 5 Learning in a Single Neuron January 21, 2015 1 / 14
CSC321 Lecture 5 Learning in a Single Neuron Roger Grosse and Nitish Srivastava January 21, 2015 Roger Grosse and Nitish Srivastava CSC321 Lecture 5 Learning in a Single Neuron January 21, 2015 1 / 14
Structural Dynamics Prof. P. Banerji Department of Civil Engineering Indian Institute of Technology, Bombay. Lecture - 1 Introduction
 Structural Dynamics Prof. P. Banerji Department of Civil Engineering Indian Institute of Technology, Bombay Lecture - 1 Introduction Hello, I am Pradipta Banerji from the department of civil engineering,
Structural Dynamics Prof. P. Banerji Department of Civil Engineering Indian Institute of Technology, Bombay Lecture - 1 Introduction Hello, I am Pradipta Banerji from the department of civil engineering,
Vectors. A vector is usually denoted in bold, like vector a, or sometimes it is denoted a, or many other deviations exist in various text books.
 Vectors A Vector has Two properties Magnitude and Direction. That s a weirder concept than you think. A Vector does not necessarily start at a given point, but can float about, but still be the SAME vector.
Vectors A Vector has Two properties Magnitude and Direction. That s a weirder concept than you think. A Vector does not necessarily start at a given point, but can float about, but still be the SAME vector.
Intro Vectors 2D implicit curves 2D parametric curves. Graphics 2011/2012, 4th quarter. Lecture 2: vectors, curves, and surfaces
 Lecture 2, curves, and surfaces Organizational remarks Tutorials: Tutorial 1 will be online later today TA sessions for questions start next week Practicals: Exams: Make sure to find a team partner very
Lecture 2, curves, and surfaces Organizational remarks Tutorials: Tutorial 1 will be online later today TA sessions for questions start next week Practicals: Exams: Make sure to find a team partner very
Graphics (INFOGR), , Block IV, lecture 8 Deb Panja. Today: Matrices. Welcome
, , Block IV, lecture 8 Deb Panja. Today: Matrices. Welcome") Graphics (INFOGR), 2017-18, Block IV, lecture 8 Deb Panja Today: Matrices Welcome 1 Today Matrices: why and what? Matrix operations Determinants Adjoint/adjugate and inverse of matrices Geometric interpretation
Graphics (INFOGR), 2017-18, Block IV, lecture 8 Deb Panja Today: Matrices Welcome 1 Today Matrices: why and what? Matrix operations Determinants Adjoint/adjugate and inverse of matrices Geometric interpretation
Statics. Today Introductions Review Course Outline and Class Schedule Course Expectations Chapter 1 ENGR 1205 ENGR 1205
 Statics ENGR 1205 Kaitlin Ford kford@mtroyal.ca B175 Today Introductions Review Course Outline and Class Schedule Course Expectations Start Chapter 1 1 the goal of this course is to develop your ability
Statics ENGR 1205 Kaitlin Ford kford@mtroyal.ca B175 Today Introductions Review Course Outline and Class Schedule Course Expectations Start Chapter 1 1 the goal of this course is to develop your ability
Vector calculus background
 Vector calculus background Jiří Lebl January 18, 2017 This class is really the vector calculus that you haven t really gotten to in Calc III. Let us start with a very quick review of the concepts from
Vector calculus background Jiří Lebl January 18, 2017 This class is really the vector calculus that you haven t really gotten to in Calc III. Let us start with a very quick review of the concepts from
MAT 1339-S14 Class 8
 MAT 1339-S14 Class 8 July 28, 2014 Contents 7.2 Review Dot Product........................... 2 7.3 Applications of the Dot Product..................... 4 7.4 Vectors in Three-Space.........................
MAT 1339-S14 Class 8 July 28, 2014 Contents 7.2 Review Dot Product........................... 2 7.3 Applications of the Dot Product..................... 4 7.4 Vectors in Three-Space.........................