Sliding Mode Control Strategies for Spacecraft Rendezvous Maneuvers
|
|
|
- Eric Hodge
- 5 years ago
- Views:
Transcription

1 Osaka University March 15, 2018 Sliding Mode Control Strategies for Spacecraft Rendezvous Maneuvers Elisabetta Punta CNR-IEIIT, Italy
2 Problem Statement First Case Spacecraft Model Position Dynamics Attitude Dynamics Actuation Systems Sliding Mode Control First Order Sliding Mode - Position Second Order Sliding Mode - Attitude Simulation Results Remarks Rendezvous Maneuvers Sliding Mode Control Spacecraft Systems
3 Spacecraft Systems

4 Position Dynamics uncertainties control The position vector The force vector in the LVLH frame The force vector in the body frame The transformation matrix between body and LVLH frames The control matrix
5 Attitude Dynamics Quaternions uncertainties control The angular velocities vector of the Chaser The angular velocities vector of the RW The moment of inertia of the RW The control matrix
6 Mono-directional Actuation System for Position Control The actuation system for position control exploits thrusters. The thrusters can exert mono-directional on-off actions. The control design will specify thrusters number and disposition. Mono-directional Action Non-modulated On-off Action Fixed Limited Switching Frequency The inverse of the constant allowed switching frequency for the is the maximum thruster.
7 Thrusters (I) The thrusters produce forces and moments that have to be considered for the evaluation of the spacecraft dynamics. The task of the thruster model is to convert On/Off command into thrust and moment variation according to their shoot direction and their location wrt the CoM. Forces Thrusters +X 1X 3X -X 2X 4X +Y 2Y 3Y -Y 1Y 4Y +Z 3Z 4Z -Z 2Z 1Z 7 Two thrusters have to switched on simultaneously to provide the necessary force to move the spacecraft.
8 Thrusters (II) Thrusters are characterized by predictable, accurate and repeatable performance but they cannot be modulated. The maximum thrust is provided when the thrusters is switched on. An electronic device on thrusters permit to halve the maximum thrust but can be activated only one time. Discontinuous Action Mono-directional Action Fixed Limited Switching Frequency Non-modulated On-off Action Bias and random errors are considered for the thruster errors in magnitude. Directional cosines for the shoot errors. 8
.")
9 Thrusters (III) Forces Thrusters +X 1X 3X -X 2X 4X +Y 2Y 3Y -Y 1Y 4Y +Z 3Z 4Z -Z 2Z 1Z Component-wise directions of the Control Vectors Two thrusters have to switched on simultaneously to provide the necessary force to move the spacecraft. The number of pairs of thrusters used to fully actuate the system is 12 (6 pairs). The thrusters of the pair are always switched on together and exert the nominal force on the Chaser
10 Actuation System for Attitude Control The actuation system for attitude control exploits reaction wheels. The RW actuators can exert bi-directional continuous actions. Three reaction wheels, driven by electric motors powered by the spacecraft electrical power supply, are used. Bi-directional Actions Saturated on the maximum torque Continuous Actions A saturation on the maximum torque provided by the RW.
11 Spacecraft Rendezvous Maneuvers
12 Rendezvous Maneuvers (I) Spacecraft Systems Rendezvous Maneuvers Approaching Maneuver Cone
13 Rendezvous Maneuvers (II) Spacecraft Systems Rendezvous Maneuvers Approaching Maneuver Cone
14 First and Second Order Sliding Mode Control Strategies for Spacecraft Rendezvous Maneuvers
15 Spacecraft Rendezvous Maneuvers First Order Sliding Mode Control




16 Position Tracking First Order SMC First Order SMC n = number of thrusters, T max = maximum thrust Sliding Output Component-wise directions of the Control Vectors Two thrusters have to switched on simultaneously to provide the necessary force to move the spacecraft.
17 Multi-Input Sliding Mode Control: Switching Logic Component-Wise Switching Logic
18 Desired Position, Velocity and Control Switching Frequency Control Switching Frequency Position and Velocity Reference
19 Spacecraft Rendezvous Maneuvers Second Order Sliding Mode Control
20 Attitude Tracking Second Order SMC Super-Twisting SMC Sliding Output Desired Attitude The desired attitude implies that LVLH and Body Frames are aligned

21 Simulation Results
22 Simulation Results (II) Different cases are analyzed in function of the switching frequencies of the thrusters and of the distance between the two bodies. The external disturbances are considered for all the simulations. The thruster errors are included in some simulations. For all the simulations the performance indicators are the final R bar, the fuel consumption and the total time required for complete the maneuver. 22

23 Simulation Results (I) A 6 DOF simulation is considered for evaluation of the tracking performance of the proposed controller. The Target CoM is located at the origin of the LVLH frame and is 500 m far from the Chaser. The maneuver starts with a speed equal to 0.15 m/s at an orbit altitude of 650 km. Spacecraft geometrical and inertial data [4] : Low thrust produces low spacecraft accelerations and guarantees low fuel consumption and high precision. [4] Guglieri, G., Quagliotti, F., Pellegrino, P., and Saluzzi, A., Analysis of Automated Rendezvous and Docking Operations, AIAA/AAS Astrodynamics Specialist Conference and Exhibit, Honolulu, Hawaii,

24 Simulation Results: Forces
25 Simulation Results: Moments

26 Simulation Results: Case A

27 Simulation Results: Case B

28 Simulation Results: Case C
29 Remarks
30 Remarks Sliding mode controllers are discontinuous and must guarantee that the system trajectories reach and maintain a motion on the desired sliding manifold. Global stability and robustness to system uncertainties. A first order sliding mode controller is implemented, reducing the fuel consumption and guaranteeing tracking in terms of positions and speeds. A second order sliding mode controller is designed as for the attitude control of the spacecraft. 30
31 Simplex Sliding Mode Control Strategies for Spacecraft Rendezvous Maneuvers
32 Problem Statement Second Case Spacecraft Model Position Dynamics Attitude Dynamics Actuation Systems Sliding Mode Control Simplex Sliding Mode - Position Second Order Sliding Mode - Attitude Simulation Results Conclusions Rendezvous Maneuvers Sliding Mode Control Spacecraft Systems
33 Spacecraft Systems
34 Position Dynamics uncertainties control The position vector The force vector in the LVLH frame The force vector in the body frame The transformation matrix between body and LVLH frames The control matrix
35 Attitude Dynamics Quaternions uncertainties control The angular velocities vector of the Chaser The angular velocities vector of the RW The moment of inertia of the RW The control matrix
36 Mono-directional Actuation System for Position Control The actuation system for position control exploits thrusters. The thrusters can exert mono-directional on-off actions. The control design will specify thrusters number and disposition. Mono-directional Action Non-modulated On-off Action Fixed Limited Switching Frequency The inverse of the constant allowed switching frequency for the is the maximum thruster.
37 Actuation System for Attitude Control The actuation system for attitude control exploits reaction wheels. The RW actuators can exert bi-directional continuous actions. Three reaction wheels, driven by electric motors powered by the spacecraft electrical power supply, are used. Bi-directional Actions Saturated on the maximum torque Continuous Actions A saturation on the maximum torque provided by the RW.
38 Spacecraft Rendezvous Maneuvers
39 Rendezvous Maneuvers Spacecraft Systems Rendezvous Maneuvers Approaching Maneuver Cone
40 Spacecraft Rendezvous Maneuvers Sliding Mode Control Design
41 Simplex of Vectors
42 Multi-Input Sliding Mode Control: Switching Logics Component-Wise Switching Logic Simplex-Based Switching Logic
43 Position Tracking Simplex SMC The thrusters configuration is designed to have a zero moment in the ideal case. The minimum number of control directions required to fully actuate the system is 4 and it is sufficient if and only if the 4 directions form a simplex of vectors in. The total number of required thrusters is 8. The thrusters of the pair are always switched on together and exert the nominal force on the Chaser
44 Position Tracking Simplex SMC Simplex SMC Sliding Output Simplex of Vectors
45 Desired Position, Velocity and Control Switching Frequency Control Switching Frequency Position and Velocity Reference
46 Attitude Tracking SMC Super-Twisting SMC Sliding Output Desired Attitude The desired attitude implies that LVLH and Body Frames are aligned
47 Simulation Results
48
49
50

51
52 Conclusions
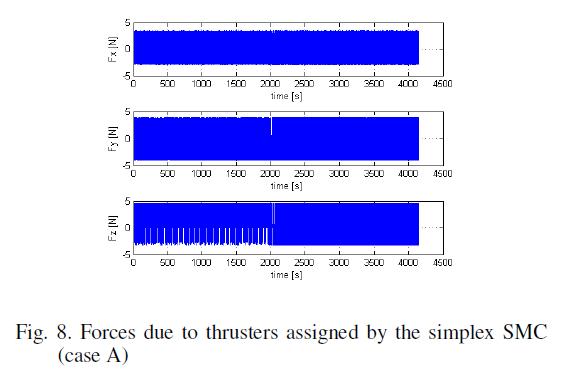
53 Conclusions SMC for simultaneous position tracking and attitude control of a rendezvous maneuver (approaching phase) between two spacecraft. Position tracking: simplex SMC considers different phases of the approaching maneuver based on the Chaser distance from the Target. Attitude control: Second Order SMC algorithm designs continuous control signals for the reaction wheels. Simplex First Order Sliding Mode Simplex SMC permits to reduce the number of thrusters, the fuel consumption and the switching frequency required to control the spacecraft. The control strategy is implemented in an on-board algorithm with minimum computational effort. Results.






54 Aerospace Applications (E. Capello, F. Dabbene, G. Guglieri, E. Punta, R. Tempo) Rendezvous and Docking Maneuvers via Sliding Mode Controllers [1] E. Capello, F. Dabbene, G. Guglieri, E. Punta, R. Tempo, Rendez-Vous and Docking Position Tracking via Sliding Mode Control, American Control Conference-ACC 2015, Chicago, IL, USA, July 1 3, [2] E. Capello, F. Dabbene, G. Guglieri, E. Punta, R. Tempo, Rendez-Vous and Docking Maneuvers via Sliding Mode Controllers, Journal of Guidance, Control, and Dynamics, vol. 40, no. 6, 2017.
Quaternion-Based Tracking Control Law Design For Tracking Mode
 A. M. Elbeltagy Egyptian Armed forces Conference on small satellites. 2016 Logan, Utah, USA Paper objectives Introduction Presentation Agenda Spacecraft combined nonlinear model Proposed RW nonlinear attitude
A. M. Elbeltagy Egyptian Armed forces Conference on small satellites. 2016 Logan, Utah, USA Paper objectives Introduction Presentation Agenda Spacecraft combined nonlinear model Proposed RW nonlinear attitude
Feedback Control of Spacecraft Rendezvous Maneuvers using Differential Drag
 Feedback Control of Spacecraft Rendezvous Maneuvers using Differential Drag D. Pérez 1 and R. Bevilacqua Rensselaer Polytechnic Institute, Troy, New York, 1180 This work presents a feedback control strategy
Feedback Control of Spacecraft Rendezvous Maneuvers using Differential Drag D. Pérez 1 and R. Bevilacqua Rensselaer Polytechnic Institute, Troy, New York, 1180 This work presents a feedback control strategy
Design of Sliding Mode Attitude Control for Communication Spacecraft
 Design of Sliding Mode Attitude Control for Communication Spacecraft Erkan Abdulhamitbilal 1 and Elbrous M. Jafarov 1 ISTAVIA Engineering, Istanbul Aeronautics and Astronautics Engineering, Istanbul Technical
Design of Sliding Mode Attitude Control for Communication Spacecraft Erkan Abdulhamitbilal 1 and Elbrous M. Jafarov 1 ISTAVIA Engineering, Istanbul Aeronautics and Astronautics Engineering, Istanbul Technical
Visual Feedback Attitude Control of a Bias Momentum Micro Satellite using Two Wheels
 Visual Feedback Attitude Control of a Bias Momentum Micro Satellite using Two Wheels Fuyuto Terui a, Nobutada Sako b, Keisuke Yoshihara c, Toru Yamamoto c, Shinichi Nakasuka b a National Aerospace Laboratory
Visual Feedback Attitude Control of a Bias Momentum Micro Satellite using Two Wheels Fuyuto Terui a, Nobutada Sako b, Keisuke Yoshihara c, Toru Yamamoto c, Shinichi Nakasuka b a National Aerospace Laboratory
AUTONOMOUS AND ROBUST RENDEZVOUS GUIDANCE ON ELLIPTICAL ORBIT SUBJECT TO J 2 PERTURBATION.
 AUTONOMOUS AND ROBUST RENDEZVOUS GUIDANCE ON ELLIPTICAL ORBIT SUBJECT TO J 2 PERTURBATION Emmanuel GOGIBUS (1), Hervé CHARBONNEL (2), Patrick DELPY (3) (1) Astrium Space Transportation, 66 route de Verneuil,
AUTONOMOUS AND ROBUST RENDEZVOUS GUIDANCE ON ELLIPTICAL ORBIT SUBJECT TO J 2 PERTURBATION Emmanuel GOGIBUS (1), Hervé CHARBONNEL (2), Patrick DELPY (3) (1) Astrium Space Transportation, 66 route de Verneuil,
FAULT DETECTION for SPACECRAFT ATTITUDE CONTROL SYSTEM. M. Amin Vahid D. Mechanical Engineering Department Concordia University December 19 th, 2010
 FAULT DETECTION for SPACECRAFT ATTITUDE CONTROL SYSTEM M. Amin Vahid D. Mechanical Engineering Department Concordia University December 19 th, 2010 Attitude control : the exercise of control over the orientation
FAULT DETECTION for SPACECRAFT ATTITUDE CONTROL SYSTEM M. Amin Vahid D. Mechanical Engineering Department Concordia University December 19 th, 2010 Attitude control : the exercise of control over the orientation
PRELIMINARY HARDWARE DESIGN OF ATTITUDE CONTROL SUBSYSTEM OF LEONIDAS SPACECRAFT
 PRELIMINARY HARDWARE DESIGN OF ATTITUDE CONTROL SUBSYSTEM OF LEONIDAS SPACECRAFT Chak Shing Jackie Chan College of Engineering University of Hawai i at Mānoa Honolulu, HI 96822 ABSTRACT In order to monitor
PRELIMINARY HARDWARE DESIGN OF ATTITUDE CONTROL SUBSYSTEM OF LEONIDAS SPACECRAFT Chak Shing Jackie Chan College of Engineering University of Hawai i at Mānoa Honolulu, HI 96822 ABSTRACT In order to monitor
Dynamical Analysis of Rendezvous and Docking with Very Large Space Infrastructures in Non-Keplerian Orbits
 6th International Conference on Astrodynamics Tools and Techniques Dynamical Analysis of Rendezvous and Docking with Very Large Space Infrastructures in Non-Keplerian Orbits Andrea Colagrossi, Michèle
6th International Conference on Astrodynamics Tools and Techniques Dynamical Analysis of Rendezvous and Docking with Very Large Space Infrastructures in Non-Keplerian Orbits Andrea Colagrossi, Michèle
A hybrid control framework for impulsive control of satellite rendezvous
 A hybrid control framework for impulsive control of satellite rendezvous Luca Zaccarian Joint work with Mirko Brentari, Sofia Urbina, Denis Arzelier, Christophe Louembet LAAS-CNRS and University of Trento
A hybrid control framework for impulsive control of satellite rendezvous Luca Zaccarian Joint work with Mirko Brentari, Sofia Urbina, Denis Arzelier, Christophe Louembet LAAS-CNRS and University of Trento
Adaptive Backstepping Control for Optimal Descent with Embedded Autonomy
 Adaptive Backstepping Control for Optimal Descent with Embedded Autonomy Maodeng Li, Wuxing Jing Department of Aerospace Engineering, Harbin Institute of Technology, Harbin, Heilongjiang, 150001, China
Adaptive Backstepping Control for Optimal Descent with Embedded Autonomy Maodeng Li, Wuxing Jing Department of Aerospace Engineering, Harbin Institute of Technology, Harbin, Heilongjiang, 150001, China
Mixed Control Moment Gyro and Momentum Wheel Attitude Control Strategies
 AAS03-558 Mixed Control Moment Gyro and Momentum Wheel Attitude Control Strategies C. Eugene Skelton II and Christopher D. Hall Department of Aerospace & Ocean Engineering Virginia Polytechnic Institute
AAS03-558 Mixed Control Moment Gyro and Momentum Wheel Attitude Control Strategies C. Eugene Skelton II and Christopher D. Hall Department of Aerospace & Ocean Engineering Virginia Polytechnic Institute
Stabilization of Angular Velocity of Asymmetrical Rigid Body. Using Two Constant Torques
 Stabilization of Angular Velocity of Asymmetrical Rigid Body Using Two Constant Torques Hirohisa Kojima Associate Professor Department of Aerospace Engineering Tokyo Metropolitan University 6-6, Asahigaoka,
Stabilization of Angular Velocity of Asymmetrical Rigid Body Using Two Constant Torques Hirohisa Kojima Associate Professor Department of Aerospace Engineering Tokyo Metropolitan University 6-6, Asahigaoka,
Lyapunov-based Spacecraft Rendezvous Maneuvers using Differential Drag
 AIAA Guidance, Navigation, and Control Conference 08-11 August 2011, Portland, Oregon AIAA 2011-6630 Lyapunov-based Spacecraft Rendezvous Maneuvers using Differential Drag D. Pérez 1 and R. Bevilacqua
AIAA Guidance, Navigation, and Control Conference 08-11 August 2011, Portland, Oregon AIAA 2011-6630 Lyapunov-based Spacecraft Rendezvous Maneuvers using Differential Drag D. Pérez 1 and R. Bevilacqua
Attitude control of a hopping robot: a feasibility study
 Attitude control of a hopping robot: a feasibility study Tammepõld, R. and Kruusmaa, M. Tallinn University of Technology, Estonia Fiorini, P. University of Verona, Italy Summary Motivation Small mobile
Attitude control of a hopping robot: a feasibility study Tammepõld, R. and Kruusmaa, M. Tallinn University of Technology, Estonia Fiorini, P. University of Verona, Italy Summary Motivation Small mobile
FIBER OPTIC GYRO-BASED ATTITUDE DETERMINATION FOR HIGH- PERFORMANCE TARGET TRACKING
 FIBER OPTIC GYRO-BASED ATTITUDE DETERMINATION FOR HIGH- PERFORMANCE TARGET TRACKING Elias F. Solorzano University of Toronto (Space Flight Laboratory) Toronto, ON (Canada) August 10 th, 2016 30 th AIAA/USU
FIBER OPTIC GYRO-BASED ATTITUDE DETERMINATION FOR HIGH- PERFORMANCE TARGET TRACKING Elias F. Solorzano University of Toronto (Space Flight Laboratory) Toronto, ON (Canada) August 10 th, 2016 30 th AIAA/USU
INNOVATIVE STRATEGY FOR Z9 REENTRY
 INNOVATIVE STRATEGY FOR Z9 REENTRY Gregor Martens*, Elena Vellutini**, Irene Cruciani* *ELV, Corso Garibaldi, 34 Colleferro (Italy) **Aizoon, Viale Città d Europa 681, 144, Roma (Italy) Abstract Large
INNOVATIVE STRATEGY FOR Z9 REENTRY Gregor Martens*, Elena Vellutini**, Irene Cruciani* *ELV, Corso Garibaldi, 34 Colleferro (Italy) **Aizoon, Viale Città d Europa 681, 144, Roma (Italy) Abstract Large
Modeling, Dynamics and Control of Spacecraft Relative Motion in a Perturbed Keplerian Orbit
 Paper Int l J. of Aeronautical & Space Sci. 16(1), 77 88 (2015) http://dx.doi.org/10.5139/ijass.2015.16.1.77 Modeling, Dynamics and Control of Spacecraft Relative Motion in a Perturbed Keplerian Orbit
Paper Int l J. of Aeronautical & Space Sci. 16(1), 77 88 (2015) http://dx.doi.org/10.5139/ijass.2015.16.1.77 Modeling, Dynamics and Control of Spacecraft Relative Motion in a Perturbed Keplerian Orbit
On-Orbit Performance of KOMPSAT-2 AOCS Korea Aerospace Research Institute Seung-Wu Rhee, Ph. D.
 SSC07-VII-9 On-Orbit Performance of AOCS 2007. 8. Korea Aerospace Research Institute Seung-Wu Rhee, Ph. D. 1 Program - is Low Earth Orbit Satellite - Mission : Cartographic Mission of Korean Peninsula
SSC07-VII-9 On-Orbit Performance of AOCS 2007. 8. Korea Aerospace Research Institute Seung-Wu Rhee, Ph. D. 1 Program - is Low Earth Orbit Satellite - Mission : Cartographic Mission of Korean Peninsula
Lecture Module 5: Introduction to Attitude Stabilization and Control
 1 Lecture Module 5: Introduction to Attitude Stabilization and Control Lectures 1-3 Stability is referred to as a system s behaviour to external/internal disturbances (small) in/from equilibrium states.
1 Lecture Module 5: Introduction to Attitude Stabilization and Control Lectures 1-3 Stability is referred to as a system s behaviour to external/internal disturbances (small) in/from equilibrium states.
Controller Design for an Expert Spacecraft Robot Performing Proximity Operations
 Controller Design for an Expert Spacecraft Robot Performing Proximity Operations Theresia Jonsson Kaveh Albekord Gloria J. Wiens theresia@kth.se kavehdog@ufl.edu gwiens@ufl.edu Space, Automation, and Manufacturing
Controller Design for an Expert Spacecraft Robot Performing Proximity Operations Theresia Jonsson Kaveh Albekord Gloria J. Wiens theresia@kth.se kavehdog@ufl.edu gwiens@ufl.edu Space, Automation, and Manufacturing
Tracking Rigid Body Motion Using Thrusters and Momentum. Wheels
 JAS 199 Tracking Rigid Body Motion Using Thrusters and Momentum Wheels Christopher D. Hall, Panagiotis Tsiotras, and Haijun Shen Abstract Tracking control laws are developed for a rigid spacecraft using
JAS 199 Tracking Rigid Body Motion Using Thrusters and Momentum Wheels Christopher D. Hall, Panagiotis Tsiotras, and Haijun Shen Abstract Tracking control laws are developed for a rigid spacecraft using
AA 528 Spacecraft Dynamics and Control. Mehran Mesbahi Aeronautics & Astronautics Winter 2017 University of Washington
 AA 528 Spacecraft Dynamics and Control Mehran Mesbahi Aeronautics & Astronautics Winter 2017 University of Washington Spacecraft dynamics and control What is this class all about? what is in the name?
AA 528 Spacecraft Dynamics and Control Mehran Mesbahi Aeronautics & Astronautics Winter 2017 University of Washington Spacecraft dynamics and control What is this class all about? what is in the name?
AS3010: Introduction to Space Technology
 AS3010: Introduction to Space Technology L E C T U R E 22 Part B, Lecture 22 19 April, 2017 C O N T E N T S Attitude stabilization passive and active. Actuators for three axis or active stabilization.
AS3010: Introduction to Space Technology L E C T U R E 22 Part B, Lecture 22 19 April, 2017 C O N T E N T S Attitude stabilization passive and active. Actuators for three axis or active stabilization.
Optimal Fault-Tolerant Configurations of Thrusters
 Optimal Fault-Tolerant Configurations of Thrusters By Yasuhiro YOSHIMURA ) and Hirohisa KOJIMA, ) ) Aerospace Engineering, Tokyo Metropolitan University, Hino, Japan (Received June st, 7) Fault tolerance
Optimal Fault-Tolerant Configurations of Thrusters By Yasuhiro YOSHIMURA ) and Hirohisa KOJIMA, ) ) Aerospace Engineering, Tokyo Metropolitan University, Hino, Japan (Received June st, 7) Fault tolerance
IAA-CU A Simulator for Robust Attitude Control of Cubesat Deploying Satellites
 A Simulator for Robust Attitude Control of Cubesat Deploying Satellites Giovanni Mattei, George Georgiou, Angelo Pignatelli, Salvatore Monaco Abstract The paper deals with the development and testing of
A Simulator for Robust Attitude Control of Cubesat Deploying Satellites Giovanni Mattei, George Georgiou, Angelo Pignatelli, Salvatore Monaco Abstract The paper deals with the development and testing of
A Blade Element Approach to Modeling Aerodynamic Flight of an Insect-scale Robot
 A Blade Element Approach to Modeling Aerodynamic Flight of an Insect-scale Robot Taylor S. Clawson, Sawyer B. Fuller Robert J. Wood, Silvia Ferrari American Control Conference Seattle, WA May 25, 2016
A Blade Element Approach to Modeling Aerodynamic Flight of an Insect-scale Robot Taylor S. Clawson, Sawyer B. Fuller Robert J. Wood, Silvia Ferrari American Control Conference Seattle, WA May 25, 2016
COUPLED ORBITAL AND ATTITUDE CONTROL SIMULATION
 COUPLED ORBITAL AND ATTITUDE CONTROL SIMULATION Scott E. Lennox AOE 5984: Advanced Attitude Spacecraft Dynamics and Control December 12, 23 INTRODUCTION In the last few years the space industry has started
COUPLED ORBITAL AND ATTITUDE CONTROL SIMULATION Scott E. Lennox AOE 5984: Advanced Attitude Spacecraft Dynamics and Control December 12, 23 INTRODUCTION In the last few years the space industry has started
5.12 The Aerodynamic Assist Trajectories of Vehicles Propelled by Solar Radiation Pressure References...
 1 The Two-Body Problem... 1 1.1 Position of the Problem... 1 1.2 The Conic Sections and Their Geometrical Properties... 12 1.3 The Elliptic Orbits... 20 1.4 The Hyperbolic and Parabolic Trajectories...
1 The Two-Body Problem... 1 1.1 Position of the Problem... 1 1.2 The Conic Sections and Their Geometrical Properties... 12 1.3 The Elliptic Orbits... 20 1.4 The Hyperbolic and Parabolic Trajectories...
Attitude Control Simulator for the Small Satellite and Its Validation by On-orbit Data of QSAT-EOS
 SSC17-P1-17 Attitude Control Simulator for the Small Satellite and Its Validation by On-orbit Data of QSAT-EOS Masayuki Katayama, Yuta Suzaki Mitsubishi Precision Company Limited 345 Kamikmachiya, Kamakura
SSC17-P1-17 Attitude Control Simulator for the Small Satellite and Its Validation by On-orbit Data of QSAT-EOS Masayuki Katayama, Yuta Suzaki Mitsubishi Precision Company Limited 345 Kamikmachiya, Kamakura
Quadrotor Modeling and Control
 16-311 Introduction to Robotics Guest Lecture on Aerial Robotics Quadrotor Modeling and Control Nathan Michael February 05, 2014 Lecture Outline Modeling: Dynamic model from first principles Propeller
16-311 Introduction to Robotics Guest Lecture on Aerial Robotics Quadrotor Modeling and Control Nathan Michael February 05, 2014 Lecture Outline Modeling: Dynamic model from first principles Propeller
ATTITUDE CONTROL MECHANIZATION TO DE-ORBIT SATELLITES USING SOLAR SAILS
 IAA-AAS-DyCoSS2-14-07-02 ATTITUDE CONTROL MECHANIZATION TO DE-ORBIT SATELLITES USING SOLAR SAILS Ozan Tekinalp, * Omer Atas INTRODUCTION Utilization of solar sails for the de-orbiting of satellites is
IAA-AAS-DyCoSS2-14-07-02 ATTITUDE CONTROL MECHANIZATION TO DE-ORBIT SATELLITES USING SOLAR SAILS Ozan Tekinalp, * Omer Atas INTRODUCTION Utilization of solar sails for the de-orbiting of satellites is
SOLVING THE INTERNATIONAL SPACE STATION (ISS) MOTION CONTROL LONG-TERM PLANNING PROBLEM
 MOTION CONTROL LONG-TERM PLANNING PROBLEM") SOLVING THE INTERNATIONAL SPACE STATION (ISS) MOTION CONTROL LONG-TERM PLANNING PROBLEM V. N. Zhukov, Dr. E. K. Melnikov, A. I. Smirnov Mission Control Center, Central Research Institute of Machine Building,
SOLVING THE INTERNATIONAL SPACE STATION (ISS) MOTION CONTROL LONG-TERM PLANNING PROBLEM V. N. Zhukov, Dr. E. K. Melnikov, A. I. Smirnov Mission Control Center, Central Research Institute of Machine Building,
Orbital Environment Simulator
 Orbital Environment Simulator Samir Rawashdeh Space Systems Laboratory University of Kentucky 2009 Summer CubeSat Developers' Workshop August 9, 2009 Overview Introduction Implementation Details Capabilities
Orbital Environment Simulator Samir Rawashdeh Space Systems Laboratory University of Kentucky 2009 Summer CubeSat Developers' Workshop August 9, 2009 Overview Introduction Implementation Details Capabilities
GUIDANCE, NAVIGATION, AND CONTROL TECHNIQUES AND TECHNOLOGIES FOR ACTIVE DEBRIS REMOVAL
 GUIDANCE, NAVIGATION, AND CONTROL TECHNIQUES AND TECHNOLOGIES FOR ACTIVE DEBRIS REMOVAL Antonio Rinalducci, Guillermo Ortega Hernando, Sven Erb, Alexander Cropp, Thomas Voirin, Olivier Dubois-Matra, Gianfranco
GUIDANCE, NAVIGATION, AND CONTROL TECHNIQUES AND TECHNOLOGIES FOR ACTIVE DEBRIS REMOVAL Antonio Rinalducci, Guillermo Ortega Hernando, Sven Erb, Alexander Cropp, Thomas Voirin, Olivier Dubois-Matra, Gianfranco
Spacecraft Attitude Control with RWs via LPV Control Theory: Comparison of Two Different Methods in One Framework
 Trans. JSASS Aerospace Tech. Japan Vol. 4, No. ists3, pp. Pd_5-Pd_, 6 Spacecraft Attitude Control with RWs via LPV Control Theory: Comparison of Two Different Methods in One Framework y Takahiro SASAKI,),
Trans. JSASS Aerospace Tech. Japan Vol. 4, No. ists3, pp. Pd_5-Pd_, 6 Spacecraft Attitude Control with RWs via LPV Control Theory: Comparison of Two Different Methods in One Framework y Takahiro SASAKI,),
Semi-Analytical Guidance Algorithm for Fast Retargeting Maneuvers Computation during Planetary Descent and Landing
 ASTRA 2013 - ESA/ESTEC, Noordwijk, the Netherlands Semi-Analytical Guidance Algorithm for Fast Retargeting Maneuvers Computation during Planetary Descent and Landing Michèle LAVAGNA, Paolo LUNGHI Politecnico
ASTRA 2013 - ESA/ESTEC, Noordwijk, the Netherlands Semi-Analytical Guidance Algorithm for Fast Retargeting Maneuvers Computation during Planetary Descent and Landing Michèle LAVAGNA, Paolo LUNGHI Politecnico
Formation Flying and Rendezvous and Docking Simulator for Exploration Missions (FAMOS-V2)
") Formation Flying and Rendezvous and Docking Simulator for Exploration Missions (FAMOS-V2) Galder Bengoa, F. Alonso, D. García, M. Graziano (GMV S.A.) Dr. Guillermo Ortega (ESA/ESTEC) 2nd ESA Workshop on
Formation Flying and Rendezvous and Docking Simulator for Exploration Missions (FAMOS-V2) Galder Bengoa, F. Alonso, D. García, M. Graziano (GMV S.A.) Dr. Guillermo Ortega (ESA/ESTEC) 2nd ESA Workshop on
Spacecraft Constrained Maneuver Planning for Moving Debris Avoidance Using Positively Invariant Constraint Admissible Sets
 Spacecraft Constrained Maneuver Planning for Moving Debris Avoidance Using Positively Invariant Constraint Admissible Sets Avishai Weiss Morgan Baldwin R. Scott Erwin and Ilya Kolmanovsky Abstract This
Spacecraft Constrained Maneuver Planning for Moving Debris Avoidance Using Positively Invariant Constraint Admissible Sets Avishai Weiss Morgan Baldwin R. Scott Erwin and Ilya Kolmanovsky Abstract This
REACTION WHEEL CONFIGURATIONS FOR HIGH AND MIDDLE INCLINATION ORBITS
 REACTION WHEEL CONFIGURATIONS FOR HIGH AND MIDDLE INCLINATION ORBITS Zuliana Ismail and Renuganth Varatharajoo Department of Aerospace Engineering, Universiti Putra Malaysia, Malaysia E-Mail: zuliana.ismail@gmail.com
REACTION WHEEL CONFIGURATIONS FOR HIGH AND MIDDLE INCLINATION ORBITS Zuliana Ismail and Renuganth Varatharajoo Department of Aerospace Engineering, Universiti Putra Malaysia, Malaysia E-Mail: zuliana.ismail@gmail.com
Robust Rendezvous Planning Under Maneuver Execution Errors
 Robust Rendezvous Planning Under Maneuver Execution Errors Christophe Louembet, Denis Arzelier, Georgia Deaconu To cite this version: Christophe Louembet, Denis Arzelier, Georgia Deaconu. Robust Rendezvous
Robust Rendezvous Planning Under Maneuver Execution Errors Christophe Louembet, Denis Arzelier, Georgia Deaconu To cite this version: Christophe Louembet, Denis Arzelier, Georgia Deaconu. Robust Rendezvous
AN ANALYTICAL SOLUTION TO QUICK-RESPONSE COLLISION AVOIDANCE MANEUVERS IN LOW EARTH ORBIT
 AAS 16-366 AN ANALYTICAL SOLUTION TO QUICK-RESPONSE COLLISION AVOIDANCE MANEUVERS IN LOW EARTH ORBIT Jason A. Reiter * and David B. Spencer INTRODUCTION Collision avoidance maneuvers to prevent orbital
AAS 16-366 AN ANALYTICAL SOLUTION TO QUICK-RESPONSE COLLISION AVOIDANCE MANEUVERS IN LOW EARTH ORBIT Jason A. Reiter * and David B. Spencer INTRODUCTION Collision avoidance maneuvers to prevent orbital
PRELIMINAJ3.:( 6/8/92 SOFTWARE REQUIREMENTS SPECIFICATION FOR THE DSPSE GUIDANCE, NAVIGATION, AND CONTROL CSCI. Prepared by
 PRELIMINAJ3.:( SOFTWARE REQUIREMENTS SPECIFICATION FOR THE DSPSE GUIDANCE, NAVIGATION, AND CONTROL CSCI Prepared by Space Applications Corporation 6/8/92.. 1 SCOPE 1.1 IDENTIFICATION 1.2 OVERVIEW This
PRELIMINAJ3.:( SOFTWARE REQUIREMENTS SPECIFICATION FOR THE DSPSE GUIDANCE, NAVIGATION, AND CONTROL CSCI Prepared by Space Applications Corporation 6/8/92.. 1 SCOPE 1.1 IDENTIFICATION 1.2 OVERVIEW This
Swarm navigation and reconfiguration using electrostatic forces
 Swarm navigation and reconfiguration using electrostatic forces L. Pettazzi a, D. Izzo b and S. Theil a a ZARM, University of Bremen, Germany b EUI-ACT, ESA-ESTEC, The Netherlands Abstract The concept
Swarm navigation and reconfiguration using electrostatic forces L. Pettazzi a, D. Izzo b and S. Theil a a ZARM, University of Bremen, Germany b EUI-ACT, ESA-ESTEC, The Netherlands Abstract The concept
Attitude Tracking Control of a Small Satellite in Low Earth Orbit
 AIAA Guidance, Navigation, and Control Conference 10-13 August 2009, Chicago, Illinois AIAA 2009-5902 Attitude Tracking Control of a Small Satellite in Low Earth Orbit Amit K. Sanyal Zachary Lee-Ho In
AIAA Guidance, Navigation, and Control Conference 10-13 August 2009, Chicago, Illinois AIAA 2009-5902 Attitude Tracking Control of a Small Satellite in Low Earth Orbit Amit K. Sanyal Zachary Lee-Ho In
Previous Lecture. Orbital maneuvers: general framework. Single-impulse maneuver: compatibility conditions
 2 / 48 Previous Lecture Orbital maneuvers: general framework Single-impulse maneuver: compatibility conditions closed form expression for the impulsive velocity vector magnitude interpretation coplanar
2 / 48 Previous Lecture Orbital maneuvers: general framework Single-impulse maneuver: compatibility conditions closed form expression for the impulsive velocity vector magnitude interpretation coplanar
Rendezvous Maneuvers with Final Approach by R-bar to Target Satellite in Leo Orbit
 Rendezvous Maneuvers with Final Approach by R-bar to Target Satellite in Leo Orbit William Reis Silva* Ijar Milagre da Fonseca Space Mechanics and Control Division INPE - Brazilian Institute for Space
Rendezvous Maneuvers with Final Approach by R-bar to Target Satellite in Leo Orbit William Reis Silva* Ijar Milagre da Fonseca Space Mechanics and Control Division INPE - Brazilian Institute for Space
Asteroid Impact Mission AIM Workshop. Electric Propulsion for Attitude & Orbit Control
 Asteroid Impact Mission AIM Workshop Electric Propulsion for Attitude & Orbit Control ESA, ESTEC, Noordwijk, The Netherlands, 22-23 February 2016 Christophe R. Koppel Consulting Ind., 75008 Paris, France
Asteroid Impact Mission AIM Workshop Electric Propulsion for Attitude & Orbit Control ESA, ESTEC, Noordwijk, The Netherlands, 22-23 February 2016 Christophe R. Koppel Consulting Ind., 75008 Paris, France
IAC-04-A.P.12 NONLINEAR ATTITUDE CONTROL OF THE MICRO-SATELLITE ESEO
 IAC-04-A.P.12 NONLINEAR ATTITUDE CONTROL OF THE MICRO-SATELLITE ESEO Morten Pedersen Topland and Jan Tommy Gravdahl Department of Engineering Cybernetics Norwegian University of Science and Technology
IAC-04-A.P.12 NONLINEAR ATTITUDE CONTROL OF THE MICRO-SATELLITE ESEO Morten Pedersen Topland and Jan Tommy Gravdahl Department of Engineering Cybernetics Norwegian University of Science and Technology
Attitude Determination System of Small Satellite
 Attitude Determination System of Small Satellite Satellite Research Centre Jiun Wei Chia, M. Sheral Crescent Tissera and Kay-Soon Low School of EEE, Nanyang Technological University, Singapore 24 th October
Attitude Determination System of Small Satellite Satellite Research Centre Jiun Wei Chia, M. Sheral Crescent Tissera and Kay-Soon Low School of EEE, Nanyang Technological University, Singapore 24 th October
An Inverse Dynamics Attitude Control System with Autonomous Calibration. Sanny Omar Dr. David Beale Dr. JM Wersinger
 An Inverse Dynamics Attitude Control System with Autonomous Calibration Sanny Omar Dr. David Beale Dr. JM Wersinger Outline Attitude Determination and Control Systems (ADACS) Overview Coordinate Frames
An Inverse Dynamics Attitude Control System with Autonomous Calibration Sanny Omar Dr. David Beale Dr. JM Wersinger Outline Attitude Determination and Control Systems (ADACS) Overview Coordinate Frames
WEIGHTING MATRICES DETERMINATION USING POLE PLACEMENT FOR TRACKING MANEUVERS
 U.P.B. Sci. Bull., Series D, Vol. 75, Iss. 2, 2013 ISSN 1454-2358 WEIGHTING MATRICES DETERMINATION USING POLE PLACEMENT FOR TRACKING MANEUVERS Raluca M. STEFANESCU 1, Claudiu L. PRIOROC 2, Adrian M. STOICA
U.P.B. Sci. Bull., Series D, Vol. 75, Iss. 2, 2013 ISSN 1454-2358 WEIGHTING MATRICES DETERMINATION USING POLE PLACEMENT FOR TRACKING MANEUVERS Raluca M. STEFANESCU 1, Claudiu L. PRIOROC 2, Adrian M. STOICA
Nomenclature. = the local vertical and local horizontal reference frame. = angular velocity vector of spacecraft (rad/s)
") Adaptive Fault-Tolerant Control of Spacecraft Attitude Dynamics with Actuator Failures Yu Han 1 Harbin Institude of Technology, Harbin, Heilongjiang, China, 151 James D. Biggs 2 University of Strathclyde,
Adaptive Fault-Tolerant Control of Spacecraft Attitude Dynamics with Actuator Failures Yu Han 1 Harbin Institude of Technology, Harbin, Heilongjiang, China, 151 James D. Biggs 2 University of Strathclyde,
Design On-Line Tunable Gain Artificial Nonlinear Controller
 Journal of Computer Engineering 1 (2009) 3-11 Design On-Line Tunable Gain Artificial Nonlinear Controller Farzin Piltan, Nasri Sulaiman, M. H. Marhaban and R. Ramli Department of Electrical and Electronic
Journal of Computer Engineering 1 (2009) 3-11 Design On-Line Tunable Gain Artificial Nonlinear Controller Farzin Piltan, Nasri Sulaiman, M. H. Marhaban and R. Ramli Department of Electrical and Electronic
INFLUENCE OF THE ATV PROPELLANT SLOSHING ON THE GNC PERFORMANCE
 AIAA Guidance, Navigation, and Control Conference and Exhibit 5-8 August 2002, Monterey, California AIAA 2002-4845 INFLUENCE OF THE ATV PROPELLANT SLOSHING ON THE GNC PERFORMANCE O. Bayle*, V. L Hullier*,
AIAA Guidance, Navigation, and Control Conference and Exhibit 5-8 August 2002, Monterey, California AIAA 2002-4845 INFLUENCE OF THE ATV PROPELLANT SLOSHING ON THE GNC PERFORMANCE O. Bayle*, V. L Hullier*,
A Sliding Mode Control based on Nonlinear Disturbance Observer for the Mobile Manipulator
 International Core Journal of Engineering Vol.3 No.6 7 ISSN: 44-895 A Sliding Mode Control based on Nonlinear Disturbance Observer for the Mobile Manipulator Yanna Si Information Engineering College Henan
International Core Journal of Engineering Vol.3 No.6 7 ISSN: 44-895 A Sliding Mode Control based on Nonlinear Disturbance Observer for the Mobile Manipulator Yanna Si Information Engineering College Henan
Robust LQR Control Design of Gyroscope
 Robust LQR Control Design of Gyroscope Ashok S. Chandak 1, Anil J. Patil 2 Abstract The basic problem in designing control systems is the ability to achieve good performance in the presence of uncertainties
Robust LQR Control Design of Gyroscope Ashok S. Chandak 1, Anil J. Patil 2 Abstract The basic problem in designing control systems is the ability to achieve good performance in the presence of uncertainties
Mechatronics Assignment # 1
 Problem # 1 Consider a closed-loop, rotary, speed-control system with a proportional controller K p, as shown below. The inertia of the rotor is J. The damping coefficient B in mechanical systems is usually
Problem # 1 Consider a closed-loop, rotary, speed-control system with a proportional controller K p, as shown below. The inertia of the rotor is J. The damping coefficient B in mechanical systems is usually
Spacecraft Attitude Control using CMGs: Singularities and Global Controllability
 1 / 28 Spacecraft Attitude Control using CMGs: Singularities and Global Controllability Sanjay Bhat TCS Innovation Labs Hyderabad International Workshop on Perspectives in Dynamical Systems and Control
1 / 28 Spacecraft Attitude Control using CMGs: Singularities and Global Controllability Sanjay Bhat TCS Innovation Labs Hyderabad International Workshop on Perspectives in Dynamical Systems and Control
Attitude Control of UWE-4 for Orbit Correction during Formation Flying
 Attitude Control of UWE-4 for Orbit Correction during Formation Flying 1) By Siddharth DADHICH 1), Philip BANGERT 2) and Klaus SCHILLING 3) Department of Computer Science, Electrical and Space Engineering,
Attitude Control of UWE-4 for Orbit Correction during Formation Flying 1) By Siddharth DADHICH 1), Philip BANGERT 2) and Klaus SCHILLING 3) Department of Computer Science, Electrical and Space Engineering,
Design and performance simulation of a satellite momentum exchange actuator
 Australian Journal of Mechanical Engineering ISSN: 1448-4846 (Print) 2204-2253 (Online) Journal homepage: http://www.tandfonline.com/loi/tmec20 Design and performance simulation of a satellite momentum
Australian Journal of Mechanical Engineering ISSN: 1448-4846 (Print) 2204-2253 (Online) Journal homepage: http://www.tandfonline.com/loi/tmec20 Design and performance simulation of a satellite momentum
ROBUST RENDEZ-VOUS PLANNING USING THE SCENARIO APPROACH AND DIFFERENTIAL FLATNESS
 IAA-AAS-DyCoSS2-14-14-04 ROBUST RENDEZ-VOUS PLANNING USING THE SCENARIO APPROACH AND DIFFERENTIAL FLATNESS Lamberto Dell Elce and Gaëtan Kerschen INTRODUCTION There is a growing interest in uncertainty
IAA-AAS-DyCoSS2-14-14-04 ROBUST RENDEZ-VOUS PLANNING USING THE SCENARIO APPROACH AND DIFFERENTIAL FLATNESS Lamberto Dell Elce and Gaëtan Kerschen INTRODUCTION There is a growing interest in uncertainty
ONE of the challenges in the design of attitude control
 IEEE TRANSACTIONS ON CONTROL SYSTEMS TECHNOLOGY 1 Adaptive Sliding Mode Fault Tolerant Attitude Tracking Control for Flexible Spacecraft Under Actuator Saturation Bing Xiao, Qinglei Hu, Member, IEEE, YouminZhang,
IEEE TRANSACTIONS ON CONTROL SYSTEMS TECHNOLOGY 1 Adaptive Sliding Mode Fault Tolerant Attitude Tracking Control for Flexible Spacecraft Under Actuator Saturation Bing Xiao, Qinglei Hu, Member, IEEE, YouminZhang,
New Control Methodology for Nonlinear Systems and Its Application to Astrodynamics
 New Control Methodology for Nonlinear Systems and Its Application to Astrodynamics Hancheol Cho, Ph.D. Marie-Curie COFUND Postdoctoral Fellow Space Structures and Systems Laboratory (S3L) Department of
New Control Methodology for Nonlinear Systems and Its Application to Astrodynamics Hancheol Cho, Ph.D. Marie-Curie COFUND Postdoctoral Fellow Space Structures and Systems Laboratory (S3L) Department of
3D Pendulum Experimental Setup for Earth-based Testing of the Attitude Dynamics of an Orbiting Spacecraft
 3D Pendulum Experimental Setup for Earth-based Testing of the Attitude Dynamics of an Orbiting Spacecraft Mario A. Santillo, Nalin A. Chaturvedi, N. Harris McClamroch, Dennis S. Bernstein Department of
3D Pendulum Experimental Setup for Earth-based Testing of the Attitude Dynamics of an Orbiting Spacecraft Mario A. Santillo, Nalin A. Chaturvedi, N. Harris McClamroch, Dennis S. Bernstein Department of
The Applicability of Pulsed Plasma Thrusters to Rendezvous and Docking of Cubesats
 The Applicability of Pulsed Plasma Thrusters to Rendezvous and Docking of Cubesats IEPC-213-424 Presented at the 33 rd International Electric Propulsion Conference, The George Washington University, Washington,
The Applicability of Pulsed Plasma Thrusters to Rendezvous and Docking of Cubesats IEPC-213-424 Presented at the 33 rd International Electric Propulsion Conference, The George Washington University, Washington,
Satellite Attitude Control System Design Using Reaction Wheels Bhanu Gouda Brian Fast Dan Simon
 Satellite Attitude Control System Design Using Reaction Wheels Bhanu Gouda Brian Fast Dan Simon Outline 1. Overview of Attitude Determination and Control system. Problem formulation 3. Control schemes
Satellite Attitude Control System Design Using Reaction Wheels Bhanu Gouda Brian Fast Dan Simon Outline 1. Overview of Attitude Determination and Control system. Problem formulation 3. Control schemes
Passive Magnetic Attitude Control for CubeSat Spacecraft
 Passive Magnetic Attitude Control for CubeSat Spacecraft David Gerhardt Advisor: Dr. Scott Palo University of Colorado at Boulder Department of Aerospace Engineering Sciences August 11, 2010 Motivation
Passive Magnetic Attitude Control for CubeSat Spacecraft David Gerhardt Advisor: Dr. Scott Palo University of Colorado at Boulder Department of Aerospace Engineering Sciences August 11, 2010 Motivation
Preliminary Development of an Experimental Lightweight Pulsed Plasma Thruster for Solar Sail Attitude Control
 Preliminary Development of an Experimental Lightweight Pulsed Plasma Thruster for Solar Sail Attitude Control Kevin Pryor, Bong Wie, and Pavlos Mikellides Arizona State University 18 th Annual AIAA/USU
Preliminary Development of an Experimental Lightweight Pulsed Plasma Thruster for Solar Sail Attitude Control Kevin Pryor, Bong Wie, and Pavlos Mikellides Arizona State University 18 th Annual AIAA/USU
Energy Optimum Reactionless Path Planning for Capture of Tumbling Orbiting Objects using a Dual-Arm Robot
 Energy Optimum Reactionless Path Planning for Capture of Tumbling Orbiting Objects using a Dual-Arm Robot S. V. Shah and A. Gattupalli Robotics Research Center International Institute of Information Technology
Energy Optimum Reactionless Path Planning for Capture of Tumbling Orbiting Objects using a Dual-Arm Robot S. V. Shah and A. Gattupalli Robotics Research Center International Institute of Information Technology
Finite Set Control Transcription for Optimal Control Applications
 Finite Set Control Transcription for Optimal Control Stuart A. Stanton 1 Belinda G. Marchand 2 Department of Aerospace Engineering and Engineering Mechanics The University of Texas at Austin 19th AAS/AIAA
Finite Set Control Transcription for Optimal Control Stuart A. Stanton 1 Belinda G. Marchand 2 Department of Aerospace Engineering and Engineering Mechanics The University of Texas at Austin 19th AAS/AIAA
Relative Motion Guidance, Navigation and Control for Autonomous Orbital Rendezvous
 doi: 1.528/jatm.v6i3.33 Relative Motion Guidance, Navigation and Control for Autonomous Orbital Rendezvous Mohamed Okasha 1,2, Brett Newman 2 ABSTRACT: In this paper, the dynamics of the relative motion
doi: 1.528/jatm.v6i3.33 Relative Motion Guidance, Navigation and Control for Autonomous Orbital Rendezvous Mohamed Okasha 1,2, Brett Newman 2 ABSTRACT: In this paper, the dynamics of the relative motion
Pointing Control for Low Altitude Triple Cubesat Space Darts
 Pointing Control for Low Altitude Triple Cubesat Space Darts August 12 th, 2009 U.S. Naval Research Laboratory Washington, D.C. Code 8231-Attitude Control System James Armstrong, Craig Casey, Glenn Creamer,
Pointing Control for Low Altitude Triple Cubesat Space Darts August 12 th, 2009 U.S. Naval Research Laboratory Washington, D.C. Code 8231-Attitude Control System James Armstrong, Craig Casey, Glenn Creamer,
MICROSATELLITE AUTONOMOUS GNC IN-FLIGHT VALIDATION ,
 MICROSATELLITE AUTONOMOUS GNC IN-FLIGHT VALIDATION Franck DARNON (1), Jean-Charles DAMERY (1), Christine FALLET (1), Clémence LE FEVRE (1), Réjane IBOS (1) and Denis LAURICHESSE (1) (1) Centre National
MICROSATELLITE AUTONOMOUS GNC IN-FLIGHT VALIDATION Franck DARNON (1), Jean-Charles DAMERY (1), Christine FALLET (1), Clémence LE FEVRE (1), Réjane IBOS (1) and Denis LAURICHESSE (1) (1) Centre National
IAC-11-C1.5.9 INERTIA-FREE ATTITUDE CONTROL OF SPACECRAFT WITH UNKNOWN TIME-VARYING MASS DISTRIBUTION
 6nd International Astronautical Congress, Cape Town, SA. Copyright by the International Astronautical Federation. All rights reserved IAC--C.5.9 INERTIA-FREE ATTITUDE CONTROL OF SPACECRAFT WITH UNKNOWN
6nd International Astronautical Congress, Cape Town, SA. Copyright by the International Astronautical Federation. All rights reserved IAC--C.5.9 INERTIA-FREE ATTITUDE CONTROL OF SPACECRAFT WITH UNKNOWN
Inertia-Free Spacecraft Attitude Control Using. Reaction Wheels
 Inertia-Free Spacecraft Attitude Control Using Reaction Wheels Avishai Weiss, Ilya Kolmanovsky, Dennis S. Bernstein, Department of Aerospace Engineering, The University of Michigan, Ann Arbor, MI 489-4
Inertia-Free Spacecraft Attitude Control Using Reaction Wheels Avishai Weiss, Ilya Kolmanovsky, Dennis S. Bernstein, Department of Aerospace Engineering, The University of Michigan, Ann Arbor, MI 489-4
TRAJECTORY SIMULATIONS FOR THRUST-VECTORED ELECTRIC PROPULSION MISSIONS
 RAJECORY SIMULAIONS FOR HRUS-VECORED ELECRIC PROPULSION MISSIONS Abstract N. Leveque, C. Welch, A. Ellery, A. Curley Kingston University, Astronautics and Space Systems Group School of Engineering Friars
RAJECORY SIMULAIONS FOR HRUS-VECORED ELECRIC PROPULSION MISSIONS Abstract N. Leveque, C. Welch, A. Ellery, A. Curley Kingston University, Astronautics and Space Systems Group School of Engineering Friars
Robust Adaptive Attitude Control of a Spacecraft
 Robust Adaptive Attitude Control of a Spacecraft AER1503 Spacecraft Dynamics and Controls II April 24, 2015 Christopher Au Agenda Introduction Model Formulation Controller Designs Simulation Results 2
Robust Adaptive Attitude Control of a Spacecraft AER1503 Spacecraft Dynamics and Controls II April 24, 2015 Christopher Au Agenda Introduction Model Formulation Controller Designs Simulation Results 2
TERMINAL ATTITUDE-CONSTRAINED GUIDANCE AND CONTROL FOR LUNAR SOFT LANDING
 IAA-AAS-DyCoSS2-14 -02-05 TERMINAL ATTITUDE-CONSTRAINED GUIDANCE AND CONTROL FOR LUNAR SOFT LANDING Zheng-Yu Song, Dang-Jun Zhao, and Xin-Guang Lv This work concentrates on a 3-dimensional guidance and
IAA-AAS-DyCoSS2-14 -02-05 TERMINAL ATTITUDE-CONSTRAINED GUIDANCE AND CONTROL FOR LUNAR SOFT LANDING Zheng-Yu Song, Dang-Jun Zhao, and Xin-Guang Lv This work concentrates on a 3-dimensional guidance and
arxiv: v1 [math.oc] 14 Jan 2018
![arxiv: v1 [math.oc] 14 Jan 2018](/thumbs/92/110308524.jpg "arxiv: v1 [math.oc] 14 Jan 2018") Model Predictive Control in Spacecraft Rendezvous and Soft Docking arxiv:1801.04495v1 [math.oc] 14 Jan 018 Yaguang Yang January 16, 018 Abstract This paper discusses translation and attitude control in
Model Predictive Control in Spacecraft Rendezvous and Soft Docking arxiv:1801.04495v1 [math.oc] 14 Jan 018 Yaguang Yang January 16, 018 Abstract This paper discusses translation and attitude control in
Center of Gravity Pearson Education, Inc.
 Center of Gravity = The center of gravity position is at a place where the torque from one end of the object is balanced by the torque of the other end and therefore there is NO rotation. Fulcrum Point
Center of Gravity = The center of gravity position is at a place where the torque from one end of the object is balanced by the torque of the other end and therefore there is NO rotation. Fulcrum Point
Previous Lecture. Approximate solutions for the motion about an oblate planet: The Brouwer model. The Cid- Lahulla model 2 / 39
 2 / 39 Previous Lecture Approximate solutions for the motion about an oblate planet: The Brouwer model The Cid- Lahulla model 3 / 39 Definition of Orbital Maneuvering Orbital maneuver: the use of the propulsion
2 / 39 Previous Lecture Approximate solutions for the motion about an oblate planet: The Brouwer model The Cid- Lahulla model 3 / 39 Definition of Orbital Maneuvering Orbital maneuver: the use of the propulsion
Astrodynamics (AERO0024)
") Astrodynamics (AERO0024) 5B. Orbital Maneuvers Gaëtan Kerschen Space Structures & Systems Lab (S3L) Previous Lecture: Coplanar Maneuvers 5.1 INTRODUCTION 5.1.1 Why? 5.1.2 How? 5.1.3 How much? 5.1.4 When?
Astrodynamics (AERO0024) 5B. Orbital Maneuvers Gaëtan Kerschen Space Structures & Systems Lab (S3L) Previous Lecture: Coplanar Maneuvers 5.1 INTRODUCTION 5.1.1 Why? 5.1.2 How? 5.1.3 How much? 5.1.4 When?
Lyapunov-Based Thrusters Selection for Spacecraft Control: Analysis and Experimentation
 JOURNAL OF GUIDANCE,CONTROL, AND DYNAMICS Vol. 33, No. 4, July August Lyapunov-Based Thrusters Selection for Spacecraft Control: Analysis and Experimentation Downloaded by UNIVERSITY OF FLORIDA on August
JOURNAL OF GUIDANCE,CONTROL, AND DYNAMICS Vol. 33, No. 4, July August Lyapunov-Based Thrusters Selection for Spacecraft Control: Analysis and Experimentation Downloaded by UNIVERSITY OF FLORIDA on August
Multiple Spacecraft Autonomous Systems: Theoretical Research & Laboratory Experimentation
 Embry-Riddle Aeronautical University Department of Physical Sciences January 19 th 2010 Multiple Spacecraft Autonomous Systems: Theoretical Research & Laboratory Experimentation Dr. Riccardo Bevilacqua
Embry-Riddle Aeronautical University Department of Physical Sciences January 19 th 2010 Multiple Spacecraft Autonomous Systems: Theoretical Research & Laboratory Experimentation Dr. Riccardo Bevilacqua
Attitude Control on the Pico Satellite Solar Cell Testbed-2
 SSC12-II-1 Attitude Control on the Pico Satellite Solar Cell Testbed-2 Siegfried W. Janson, Brian S. Hardy, Andrew Y. Chin, Daniel L. Rumsey, Daniel A. Ehrlich, and David A. Hinkley The Aerospace Corporation
SSC12-II-1 Attitude Control on the Pico Satellite Solar Cell Testbed-2 Siegfried W. Janson, Brian S. Hardy, Andrew Y. Chin, Daniel L. Rumsey, Daniel A. Ehrlich, and David A. Hinkley The Aerospace Corporation
Almost Global Robust Attitude Tracking Control of Spacecraft in Gravity
 Almost Global Robust Attitude Tracking Control of Spacecraft in Gravity Amit K. Sanyal Nalin A. Chaturvedi In this paper, we treat the practical problem of tracking the attitude and angular velocity of
Almost Global Robust Attitude Tracking Control of Spacecraft in Gravity Amit K. Sanyal Nalin A. Chaturvedi In this paper, we treat the practical problem of tracking the attitude and angular velocity of
Spacecraft Rate Damping with Predictive Control Using Magnetic Actuators Only
 C. Böhm a M. Merk a W. Fichter b F. Allgöwer a Spacecraft Rate Damping with Predictive Control Using Magnetic Actuators Only Stuttgart, March 2009 a Institute of Systems Theory and Automatic Control, University
C. Böhm a M. Merk a W. Fichter b F. Allgöwer a Spacecraft Rate Damping with Predictive Control Using Magnetic Actuators Only Stuttgart, March 2009 a Institute of Systems Theory and Automatic Control, University
Attitude Control of a Bias Momentum Satellite Using Moment of Inertia
 I. INTRODUCTION Attitude Control of a Bias Momentum Satellite Using Moment of Inertia HYOCHOONG BANG Korea Advanced Institute of Science and Technology HYUNG DON CHOI Korea Aerospace Research Institute
I. INTRODUCTION Attitude Control of a Bias Momentum Satellite Using Moment of Inertia HYOCHOONG BANG Korea Advanced Institute of Science and Technology HYUNG DON CHOI Korea Aerospace Research Institute
ZERO PROPELLANT MANEUVER TM FLIGHT RESULTS FOR 180 ISS ROTATION
 ZERO PROPELLANT MANEUVER TM FLIGHT RESULTS FOR 180 ISS ROTATION Nazareth Bedrossian 1, Sagar Bhatt 2 The Charles Stark Draper Laboratory, Inc., Houston, TX 77058 Mike Lammers 3, Louis Nguyen 4 NASA Johnson
ZERO PROPELLANT MANEUVER TM FLIGHT RESULTS FOR 180 ISS ROTATION Nazareth Bedrossian 1, Sagar Bhatt 2 The Charles Stark Draper Laboratory, Inc., Houston, TX 77058 Mike Lammers 3, Louis Nguyen 4 NASA Johnson
Astrodynamics (AERO0024)
") Astrodynamics (AERO0024) 5B. Orbital Maneuvers Gaëtan Kerschen Space Structures & Systems Lab (S3L) Previous Lecture: Coplanar Maneuvers 5.1 INTRODUCTION 5.1.1 Why? 5.1.2 How? 5.1.3 How much? 5.1.4 When?
Astrodynamics (AERO0024) 5B. Orbital Maneuvers Gaëtan Kerschen Space Structures & Systems Lab (S3L) Previous Lecture: Coplanar Maneuvers 5.1 INTRODUCTION 5.1.1 Why? 5.1.2 How? 5.1.3 How much? 5.1.4 When?
SATELLITE ATTITUDE TRACKING BY QUATERNION-BASED BACKSTEPPING. Raymond Kristiansen,1 Per Johan Nicklasson,2 Jan Tommy Gravdahl,3
 SATELLITE ATTITUDE TRACKING BY QUATERNION-BASED BACKSTEPPING Raymond Kristiansen,1 Per Johan Nicklasson,2 Jan Tommy Gravdahl,3 Department of Space Technology Narvik University College, Norway Department
SATELLITE ATTITUDE TRACKING BY QUATERNION-BASED BACKSTEPPING Raymond Kristiansen,1 Per Johan Nicklasson,2 Jan Tommy Gravdahl,3 Department of Space Technology Narvik University College, Norway Department
*School of Aeronautics and Astronautics, Purdue University, West Lafayette, IN
 NEW CONTROL LAWS FOR THE ATTITUDE STABILIZATION OF RIGID BODIES PANAGIOTIS TSIOTRAS *School of Aeronautics and Astronautics, Purdue University, West Lafayette, IN 7907. Abstract. This paper introduces
NEW CONTROL LAWS FOR THE ATTITUDE STABILIZATION OF RIGID BODIES PANAGIOTIS TSIOTRAS *School of Aeronautics and Astronautics, Purdue University, West Lafayette, IN 7907. Abstract. This paper introduces
Satellite Attitude Control by Quaternion-Based Backstepping
 25 American Control Conference June 8-1, 25. Portland, OR, USA WeB11.4 Satellite Attitude Control by Quaternion-Based Backstepping Raymond Kristiansen* and Per J. Nicklasson** Department of Computer Science,
25 American Control Conference June 8-1, 25. Portland, OR, USA WeB11.4 Satellite Attitude Control by Quaternion-Based Backstepping Raymond Kristiansen* and Per J. Nicklasson** Department of Computer Science,
Estimating Geometric Aspects of Relative Satellite Motion Using Angles-Only Measurements
 Estimating Geometric Aspects of Relative Satellite Motion Using Angles-Only Measurements Jason Schmidt 1 Dept of Mechanical & Aerospace Engineering, Utah State University, Logan, UT, 84322 Thomas Alan
Estimating Geometric Aspects of Relative Satellite Motion Using Angles-Only Measurements Jason Schmidt 1 Dept of Mechanical & Aerospace Engineering, Utah State University, Logan, UT, 84322 Thomas Alan
GAIN SCHEDULING CONTROL WITH MULTI-LOOP PID FOR 2- DOF ARM ROBOT TRAJECTORY CONTROL
 GAIN SCHEDULING CONTROL WITH MULTI-LOOP PID FOR 2- DOF ARM ROBOT TRAJECTORY CONTROL 1 KHALED M. HELAL, 2 MOSTAFA R.A. ATIA, 3 MOHAMED I. ABU EL-SEBAH 1, 2 Mechanical Engineering Department ARAB ACADEMY
GAIN SCHEDULING CONTROL WITH MULTI-LOOP PID FOR 2- DOF ARM ROBOT TRAJECTORY CONTROL 1 KHALED M. HELAL, 2 MOSTAFA R.A. ATIA, 3 MOHAMED I. ABU EL-SEBAH 1, 2 Mechanical Engineering Department ARAB ACADEMY
A Miniaturized Satellite Attitude Determination and Control System with Autonomous Calibration Capabilities
 A Miniaturized Satellite Attitude Determination and Control System with Autonomous Calibration Capabilities Sanny Omar Dr. David Beale Dr. JM Wersinger Introduction ADACS designed for CubeSats CubeSats
A Miniaturized Satellite Attitude Determination and Control System with Autonomous Calibration Capabilities Sanny Omar Dr. David Beale Dr. JM Wersinger Introduction ADACS designed for CubeSats CubeSats
Experiments on Stabilization of the Hanging Equilibrium of a 3D Asymmetric Rigid Pendulum
 Proceedings of the 25 IEEE Conference on Control Applications Toronto, Canada, August 28-3, 25 MB4.5 Experiments on Stabilization of the Hanging Equilibrium of a 3D Asymmetric Rigid Pendulum Mario A. Santillo,
Proceedings of the 25 IEEE Conference on Control Applications Toronto, Canada, August 28-3, 25 MB4.5 Experiments on Stabilization of the Hanging Equilibrium of a 3D Asymmetric Rigid Pendulum Mario A. Santillo,
Nonlinear Control of Electrodynamic Tether in Equatorial or Somewhat Inclined Orbits
 Proceedings of the 15th Mediterranean Conference on Control & Automation, July 7-9, 7, Athens - Greece T-5 Nonlinear Control of Electrodynamic Tether in Equatorial or Somewhat Inclined Martin B. Larsen
Proceedings of the 15th Mediterranean Conference on Control & Automation, July 7-9, 7, Athens - Greece T-5 Nonlinear Control of Electrodynamic Tether in Equatorial or Somewhat Inclined Martin B. Larsen
LISA Pathfinder Coldgas Thrusters
 LISA Pathfinder Coldgas Thrusters Joseph Martino/Eric Plagnol - LPF collaboration Lisa Symposium September 2016 Zurich Outline System Description External Disturbances and thruster noise In Flight dedicated
LISA Pathfinder Coldgas Thrusters Joseph Martino/Eric Plagnol - LPF collaboration Lisa Symposium September 2016 Zurich Outline System Description External Disturbances and thruster noise In Flight dedicated
The force F on a charge q moving with velocity v through a region of space with electric field E and magnetic field B is given by: F qe qv B
 Lorentz Forces The force F on a charge q moving with velocity v through a region of space with electric field E and magnetic field B is given by: F qe qv B F qv B B F q vbsin 2/20/2018 1 Right Hand Rule
Lorentz Forces The force F on a charge q moving with velocity v through a region of space with electric field E and magnetic field B is given by: F qe qv B F qv B B F q vbsin 2/20/2018 1 Right Hand Rule