Operations depend on pixel s Coordinates. Context free. Independent of pixel values. I(x,y) I (x,y )
|
|
|
- Melanie Carter
- 6 years ago
- Views:
Transcription

1
2 Geometric Transformation Operations depend on piel s Coordinates. Contet free. Independent of piel values. f f (, ) = ' (, ) = ' I(, ) = I' ( f (, ), f ( ) ), (,) (, ) I(,) I (, )
3 Eample: Translation = = f f (, ) = + 3 (, ) = ( + 3, ) I(, ) I ' = (,) (, ) I(,) I (, )
4 Forward Mapping Forward mapping: f f (, ) = (, ) = Source Target Forward Mapping Problems with forward mapping due to sampling: Holes (some target piels are not populated) Overlaps (some target piels assigned few colors)
5 Forward Mapping = f =, 2 ( ) Source = f =, Target ( ) = =2 = =2 =3 =4 = f =,. 7 ( ) Source? = f =, Target ( ) = =2 = =2
6 Inverse Mapping Inverse mapping: f f (, ) = (, ) = Source Target Inverse Mapping Each target piel assigned a single color. Color Interpolation is reuired.
7 Eample: Scaling along X Forward mapping: Source (,) = 2 ; = Target (,) Inverse mapping: = / 2 ; = Source Target
8 Interpolation What happens when a mapping function calculates a fractional piel location? Interpolation: generates a new piel b analzing the surrounding piels.
9 Interpolation Good interpolation techniues attempt to find an optimal balance between three undesirable artifacts: aliasing, blurring, and edge halos. 4 scaling aliasing blurring halos 9
10 Nearest Neighbor Interpolation The assign value is taken from the piel closest to the generated location: I Advantage: Fast Disadvantage: (, ) = I round f (, ) Jagged results Aliasing near edges ( { } {, round f (, ) })

11 Original Image Nearest N. Interpolation
12 Original Image Nearest N. Interpolation
13 Bilinear Interpolation The assign value is a weighted sum of the four nearest piels. Each weight is proportional to the distance from each eisting piel.
14 Linear Interpolation v e v w v w e e w w = v v e v v w w Isolating v in the above euation: v ( α) w = αv e + v where α = e w w
15 Bilinear Interpolation NW V N NE SW S SE S N V = SE + SW = NE + NW = N + S ( ) ( ) ( )
16 Bilinear Interpolation NW V N NE SW S SE The bilinear interpolation is the best fit low-degree polnomial of the form: v(, ) The piel s boundaries are C continuous (continuous values across boundaries). = i, j= a ij i j
17 Bilinear eample 5 z=5 z=7 v 5 z=2 z=

18 Nearest N. Interpolation Bilinear Interpolation
19 Nearest N. Interpolation Bilinear Interpolation
20 Bicubic Interpolation The assign value is a weighted sum of the 44 nearest piels: v(, ) = 3 i, j= a ij i j
21 How can we find the right coefficients? Denote the piel values V p {p,=..3} The unknown coefficients are a ij {i,j=..3} v p 3 = i, j= a ij i j for p, = {.. 3},, [ 2, ] We have a linear sstem of 6 euations with 6 coefficients. s The piel s boundaries are C continuous (continuous derivatives across boundaries). t 2


22 N.N Bilinear Bicubic
23 N.N

24 Bilinear
25 Bicubic
26 Appling the Transformation T = % 22 transformation matri [r,c] = size(img) % create arra of destination, coordinates [X,Y]=meshgrid(:c,:r); % calculate source coordinates sourcecoor = inv(t) * [X(:) Y(:) ] ; % calculate nearest neighbor interpolation Xs = round(sourcecoor(,:)); Ys = round(sourcecoor(2,:)); ind=find(xs< Xs>r); %out of range piels Xs(ind)=; Ys(ind)=; ind=find(ys< Ys>c); %out of range piels Xs(ind)=; Ys(ind)=; % calculate new image newimage = img((xs-).*r+ys); newimage(ind)=; newimage(ind)=; newimage = reshape(newimage,r,c);
27 Tpes of linear 2D transformations Rigid (Euclidean) transformation: Translation + Rotation (distance preserving). Similarit transformation: Translation + Rotation + Uniform Scale (angle preserving). Affine transformation: Translation + Rotation + Scale + Shear (parallelism preserving). Projective transformation Cross-ratio preserving All above transformations are groups where Rigid Similarit Affine Projective
28 Tpes of linear 2D transformations All above transformations are groups where Rigid Similarit Affine Projective
29 Matri Notation Ever location (,) is treated as a column vector: Coordinate transformation is obtained b multipling with a 22 matri? a c b d = a c + + b d
30 Matri Notation - Scale Scale(a,b): (,) (a,b) a b a = b If a or b are negative, we get reflection. Inverse: S - (a,b)=s(/a,/b) a ' ' b =
31 Matri Notation - Shear Shear(a,b): (,) (+a,+b) b a = + + a b a=.5, b=
32 Matri Notation - Rotation Rotate(θ): (,) (cosθ+sinθ, -sinθ + cosθ) cosθ sinθ cosθ + sinθ = sinθ cosθ sinθ + cosθ Inverse: R - (θ)=r T (θ)=r(-θ)
33 Matri Notation - Translation Translation(a,b): + + a b Cannot represent translation using 22 matrices. Inverse: a b
34 Homogeneous Coordinates Homogeneous Coordinates is a mapping from R n to R n+ : (, ) ( X, Y, W) ( t, t, t) Note: (t,t,t) all correspond to the same nonhomogeneous point (,). E.g. (2,3,) (6,9,3) (4,6,2). Inverse mapping: X W Y W ( X, Y, W), = (, )
35 Homogeneous Coordinates (t,t,t) (,) =(,,)
36 Some 2D Transformations Some 2D Transformations Translation : Affine transformation: Projective transformation: + + = = t t t t W Y X = t d c t b a W Y X = f e t d c t b a W Y X Affine
37 Hierarch of Linear 2D Transformations

38 Global Transformations Image Rectification
39 Global Transformations Global Warping = A
40 Global Transformations Global Warping Global Transformations Global Warping points p i points i match = p p p p p p A Y
41 Global Transformations Global Warping Global Transformations Global Warping points p i points i match = A p p p p p p Y Inverse Mapping:
42 Global Transformations Global Warping Solve for A - in terms of the least mean suare. i.e. find A - which minimizes: i pi A i 2
43 Global Transformations Global Warping Global Transformations Global Warping solution: ( ) ) ( = T XX T X X pinv = Y pinv p p p p p p A
44 Global Transformations Global Warping Global Transformations Global Warping Alternative representation: = f e d c b a = = f d c e b a A Rearrange:
45 Global Transformations Global Warping Global Transformations Global Warping = f e d cb a p p
46 Global Transformations Global Warping Global Transformations Global Warping = f e d cb a p p p p p p
47 Global Transformations Global Warping Global Transformations Global Warping = p p p p p p pinv f e d c b a ' ( ) T T Q Q Q Q pinv ) '( = solution:
48 Global Transformations Global Warping Global Transformations Global Warping What about Projective Transformations? = h g f d c e b a Homogeneit must be preserved! ' ; ' = = h g f d c h g e b a
49 Global Transformations Global Warping Global Transformations Global Warping What about Projective Transformations? ' ; ' = = h g f d c h g e b a ( ) = h g f e d c b a ' ' And similarl for



50 Global Transformations Image Rectification So who ARE we?

51 Local Transformations Image Warping Demo ale
52 Local Transformations Image Warping Area of influence Area of influence p s p s p d p d p s = source point p d = destination point
53 Local Transformations Image Warping Area of influence p s p s = source point p d = destination point p d destination p d p s p s source p d


54 Image Morphing (Image Metamorphosis) Demo bw
55 Cross Dissolve (piel operations) Source Image Destination Image t cross dissolve I ( t) = ( t) t [,] S + t T warp + dissolve
56 Warping + Cross Dissolve Warp source image towards intermediate image. Warp destination image towards intermediate image. Cross-dissolve the two images b taking the weighted average at each piel. source time Cross-dissolve destination warping images
57 warp Cross-dissolve Cross-dissolve warp
58 Image Metamorphosis Let S,T be the source and the target images Let G(p) be the transformation from S towards T, where G()=I (the identit) Let t [,] the time step to be snthesized Algorithm:. Warp S towards T: 2. Warp T toward S: 3. Cross dissolve: S T ( t) = G( t p){ S} I ( ) (( ) ) t = G t p { T} ( t) = ( t) S( t) + t T( t)
+t (T(t)) target T(t)=G((-t) p) -")
59 t sourse S(t)=G(t p){s} I(t)=(-t) S(t)+t (T(t)) target T(t)=G((-t) p) - {T}
60 Feature Based Morphing Morph one shape into another shape Use local features to define the geometric warping
61 Q Q P P
62 Q Q P P
63 Q Q P P
64 Q Q P P
65 Q Q P P
66 Q Q P P
67 One Segment Warping Q β u v R α P Source Image Dest Image α [,] is the relative position along the segment (P,Q ). β is the actual perpendicular distance to the segment. (u,v ) is the local coordinates of the segment (P,Q ): u is a unit vector parallel to Q -P Q v is the unit vector perpendicular to Q -P ( Q P ) β α u v u u = Q P v = u = u R P
68 Q β R u v α P The point R is mapped into (α,β) : ( R P ) u α = ; β = Q P ( R P ) v where R' = P' + α Q' P' u' + βv'
69 Q u β v R α P Source Image Q u v β α Dest Image R P Inverse Mapping: R( α, β ) = P+ α Q P u+ βv where (u,v) is the local coordinates of the segment (P,Q): u ( Q P) = u Q P v= u= u
70 Multiple Segment Warping Q 2 Q Q 2 Q R β R 2 β 2 R β β 2 P P 2 P P 2 In multiple segment warping the point R is influenced b multiple segments. The influence strength of each segments is proportional to: Segment length The distance from the point R
71 The influence of each segments is: p Qi P i W i = a+β i The value p [,] controls the influence of the line length. The value a is a small number avoiding division b zero. The value b determines how the relative weight diminish as the β increases b The final mapping is: R = k k W R k W k k


72 Eample: Eample images from: For more details see: Thaddeus Beier & Shawn Neel / Feature-Based Image Metamorphosis Siggraph '92

73 Another Eample: 73
74 Mesh Warping From:

75 2-Pass Mesh Warping Algorithm The first pass warps the rows of the image: For each column of the mesh determine the -coordinates at which the mesh column crosses each image row.
76 2-Pass Mesh Warping Algorithm Then, each row of the image is warped individuall b linearl interpolating each segment between the -coordinates defined b the source mesh to the size of the corresponding segment defined b the -coordinates of the destination Mesh. The second pass performs the eact same procedure on the columns of the image b interpolating the -coordinates of the meshes.

77 VidMorph

78 Fun Morph
2D Geometric Transformations. (Chapter 5 in FVD)
") 2D Geometric Transformations (Chapter 5 in FVD) 2D geometric transformation Translation Scaling Rotation Shear Matri notation Compositions Homogeneous coordinates 2 2D Geometric Transformations Question:
2D Geometric Transformations (Chapter 5 in FVD) 2D geometric transformation Translation Scaling Rotation Shear Matri notation Compositions Homogeneous coordinates 2 2D Geometric Transformations Question:
we must pay attention to the role of the coordinate system w.r.t. which we perform a tform
 linear SO... we will want to represent the geometr of points in space we will often want to perform (rigid) transformations to these objects to position them translate rotate or move them in an animation
linear SO... we will want to represent the geometr of points in space we will often want to perform (rigid) transformations to these objects to position them translate rotate or move them in an animation
we must pay attention to the role of the coordinate system w.r.t. which we perform a tform
 linear SO... we will want to represent the geometr of points in space we will often want to perform (rigid) transformations to these objects to position them translate rotate or move them in an animation
linear SO... we will want to represent the geometr of points in space we will often want to perform (rigid) transformations to these objects to position them translate rotate or move them in an animation
= x. I (x,y ) Example: Translation. Operations depend on pixel s Coordinates. Context free. Independent of pixel values. I(x,y) Forward mapping:
 Example: Translation. Operations depend on pixel s Coordinates. Context free. Independent of pixel values. I(x,y) Forward mapping:") Gomric Transormaion Oraions dnd on il s Coordinas. Con r. Indndn o il valus. (, ) ' (, ) ' I (, ) I ' ( (, ), ( ) ), (,) (, ) I(,) I (, ) Eaml: Translaion (, ) (, ) (, ) I(, ) I ' Forward Maing Forward
Gomric Transormaion Oraions dnd on il s Coordinas. Con r. Indndn o il valus. (, ) ' (, ) ' I (, ) I ' ( (, ), ( ) ), (,) (, ) I(,) I (, ) Eaml: Translaion (, ) (, ) (, ) I(, ) I ' Forward Maing Forward
Graphics Example: Type Setting
 D Transformations Graphics Eample: Tpe Setting Modern Computerized Tpesetting Each letter is defined in its own coordinate sstem And positioned on the page coordinate sstem It is ver simple, m she thought,
D Transformations Graphics Eample: Tpe Setting Modern Computerized Tpesetting Each letter is defined in its own coordinate sstem And positioned on the page coordinate sstem It is ver simple, m she thought,
CS 378: Computer Game Technology
 CS 378: Computer Game Technolog 3D Engines and Scene Graphs Spring 202 Universit of Teas at Austin CS 378 Game Technolog Don Fussell Representation! We can represent a point, p =,), in the plane! as a
CS 378: Computer Game Technolog 3D Engines and Scene Graphs Spring 202 Universit of Teas at Austin CS 378 Game Technolog Don Fussell Representation! We can represent a point, p =,), in the plane! as a
Reading. 4. Affine transformations. Required: Watt, Section 1.1. Further reading:
 Reading Required: Watt, Section.. Further reading: 4. Affine transformations Fole, et al, Chapter 5.-5.5. David F. Rogers and J. Alan Adams, Mathematical Elements for Computer Graphics, 2 nd Ed., McGraw-Hill,
Reading Required: Watt, Section.. Further reading: 4. Affine transformations Fole, et al, Chapter 5.-5.5. David F. Rogers and J. Alan Adams, Mathematical Elements for Computer Graphics, 2 nd Ed., McGraw-Hill,
Geometric Image Manipulation. Lecture #4 Wednesday, January 24, 2018
 Geometric Image Maniplation Lectre 4 Wednesda, Janar 4, 08 Programming Assignment Image Maniplation: Contet To start with the obvios, an image is a D arra of piels Piel locations represent points on the
Geometric Image Maniplation Lectre 4 Wednesda, Janar 4, 08 Programming Assignment Image Maniplation: Contet To start with the obvios, an image is a D arra of piels Piel locations represent points on the
CS 354R: Computer Game Technology
 CS 354R: Computer Game Technolog Transformations Fall 207 Universit of Teas at Austin CS 354R Game Technolog S. Abraham Transformations What are the? Wh should we care? Universit of Teas at Austin CS 354R
CS 354R: Computer Game Technolog Transformations Fall 207 Universit of Teas at Austin CS 354R Game Technolog S. Abraham Transformations What are the? Wh should we care? Universit of Teas at Austin CS 354R
Matrices. VCE Maths Methods - Unit 2 - Matrices
 Matrices Introduction to matrices Addition & subtraction Scalar multiplication Matri multiplication The unit matri Matri division - the inverse matri Using matrices - simultaneous equations Matri transformations
Matrices Introduction to matrices Addition & subtraction Scalar multiplication Matri multiplication The unit matri Matri division - the inverse matri Using matrices - simultaneous equations Matri transformations
Affine transformations
 Reading Required: Affine transformations Brian Curless CSE 557 Fall 2009 Shirle, Sec. 2.4, 2.7 Shirle, Ch. 5.-5.3 Shirle, Ch. 6 Further reading: Fole, et al, Chapter 5.-5.5. David F. Rogers and J. Alan
Reading Required: Affine transformations Brian Curless CSE 557 Fall 2009 Shirle, Sec. 2.4, 2.7 Shirle, Ch. 5.-5.3 Shirle, Ch. 6 Further reading: Fole, et al, Chapter 5.-5.5. David F. Rogers and J. Alan
Vector and Affine Math
 Vector and Affine Math Computer Science Department The Universit of Teas at Austin Vectors A vector is a direction and a magnitude Does NOT include a point of reference Usuall thought of as an arrow in
Vector and Affine Math Computer Science Department The Universit of Teas at Austin Vectors A vector is a direction and a magnitude Does NOT include a point of reference Usuall thought of as an arrow in
Transformations. Chapter D Transformations Translation
 Chapter 4 Transformations Transformations between arbitrary vector spaces, especially linear transformations, are usually studied in a linear algebra class. Here, we focus our attention to transformation
Chapter 4 Transformations Transformations between arbitrary vector spaces, especially linear transformations, are usually studied in a linear algebra class. Here, we focus our attention to transformation
Mathematics of Cryptography Part I
 CHAPTER 2 Mathematics of Crptograph Part I (Solution to Practice Set) Review Questions 1. The set of integers is Z. It contains all integral numbers from negative infinit to positive infinit. The set of
CHAPTER 2 Mathematics of Crptograph Part I (Solution to Practice Set) Review Questions 1. The set of integers is Z. It contains all integral numbers from negative infinit to positive infinit. The set of
( ) ( ) ( ) ( ) TNM046: Datorgrafik. Transformations. Linear Algebra. Linear Algebra. Sasan Gooran VT Transposition. Scalar (dot) product:
 ( ) ( ) ( ) TNM046: Datorgrafik. Transformations. Linear Algebra. Linear Algebra. Sasan Gooran VT Transposition. Scalar (dot) product:") TNM046: Datorgrafik Transformations Sasan Gooran VT 04 Linear Algebra ( ) ( ) =,, 3 =,, 3 Transposition t = 3 t = 3 Scalar (dot) product: Length (Norm): = t = + + 3 3 = = + + 3 Normaliation: ˆ = Linear
TNM046: Datorgrafik Transformations Sasan Gooran VT 04 Linear Algebra ( ) ( ) =,, 3 =,, 3 Transposition t = 3 t = 3 Scalar (dot) product: Length (Norm): = t = + + 3 3 = = + + 3 Normaliation: ˆ = Linear
Affine transformations. Brian Curless CSE 557 Fall 2014
 Affine transformations Brian Curless CSE 557 Fall 2014 1 Reading Required: Shirle, Sec. 2.4, 2.7 Shirle, Ch. 5.1-5.3 Shirle, Ch. 6 Further reading: Fole, et al, Chapter 5.1-5.5. David F. Rogers and J.
Affine transformations Brian Curless CSE 557 Fall 2014 1 Reading Required: Shirle, Sec. 2.4, 2.7 Shirle, Ch. 5.1-5.3 Shirle, Ch. 6 Further reading: Fole, et al, Chapter 5.1-5.5. David F. Rogers and J.
Affine transformations
 Reading Optional reading: Affine transformations Brian Curless CSE 557 Autumn 207 Angel and Shreiner: 3., 3.7-3. Marschner and Shirle: 2.3, 2.4.-2.4.4, 6..-6..4, 6.2., 6.3 Further reading: Angel, the rest
Reading Optional reading: Affine transformations Brian Curless CSE 557 Autumn 207 Angel and Shreiner: 3., 3.7-3. Marschner and Shirle: 2.3, 2.4.-2.4.4, 6..-6..4, 6.2., 6.3 Further reading: Angel, the rest
Image preprocessing in spatial domain
 Image preprocessing in spatial domain Sampling theorem, aliasing, interpolation, geometrical transformations Revision: 1.4, dated: May 25, 2006 Tomáš Svoboda Czech Technical University, Faculty of Electrical
Image preprocessing in spatial domain Sampling theorem, aliasing, interpolation, geometrical transformations Revision: 1.4, dated: May 25, 2006 Tomáš Svoboda Czech Technical University, Faculty of Electrical
Image preprocessing in spatial domain
 Image preprocessing in spatial domain Sampling theorem, aliasing, interpolation, geometrical transformations Revision: 1.3, dated: December 7, 2005 Tomáš Svoboda Czech Technical University, Faculty of
Image preprocessing in spatial domain Sampling theorem, aliasing, interpolation, geometrical transformations Revision: 1.3, dated: December 7, 2005 Tomáš Svoboda Czech Technical University, Faculty of
Two conventions for coordinate systems. Left-Hand vs Right-Hand. x z. Which is which?
 walters@buffalo.edu CSE 480/580 Lecture 2 Slide 3-D Transformations 3-D space Two conventions for coordinate sstems Left-Hand vs Right-Hand (Thumb is the ais, inde is the ais) Which is which? Most graphics
walters@buffalo.edu CSE 480/580 Lecture 2 Slide 3-D Transformations 3-D space Two conventions for coordinate sstems Left-Hand vs Right-Hand (Thumb is the ais, inde is the ais) Which is which? Most graphics
Matrices. VCE Maths Methods - Unit 2 - Matrices
 Matrices Introduction to matrices Addition subtraction Scalar multiplication Matri multiplication The unit matri Matri division - the inverse matri Using matrices - simultaneous equations Matri transformations
Matrices Introduction to matrices Addition subtraction Scalar multiplication Matri multiplication The unit matri Matri division - the inverse matri Using matrices - simultaneous equations Matri transformations
( ) Geometric Operations and Morphing. Geometric Transformation. Forward v.s. Inverse Mapping. I (x,y ) Image Processing - Lesson 4 IDC-CG 1
 Geometric Operations and Morphing. Geometric Transformation. Forward v.s. Inverse Mapping. I (x,y ) Image Processing - Lesson 4 IDC-CG 1") Img Procssing - Lsson 4 Gomtric Oprtions nd Morphing Gomtric Trnsformtion Oprtions dpnd on Pil s Coordints. Contt fr. Indpndnt of pil vlus. f f (, ) (, ) ( f (, ), f ( ) ) I(, ) I', (,) (, ) I(,) I (,
Img Procssing - Lsson 4 Gomtric Oprtions nd Morphing Gomtric Trnsformtion Oprtions dpnd on Pil s Coordints. Contt fr. Indpndnt of pil vlus. f f (, ) (, ) ( f (, ), f ( ) ) I(, ) I', (,) (, ) I(,) I (,
The Control-Volume Finite-Difference Approximation to the Diffusion Equation
 The Control-Volume Finite-Difference Approimation to the Diffusion Equation ME 448/548 Notes Gerald Recktenwald Portland State Universit Department of Mechanical Engineering gerr@mepdedu ME 448/548: D
The Control-Volume Finite-Difference Approimation to the Diffusion Equation ME 448/548 Notes Gerald Recktenwald Portland State Universit Department of Mechanical Engineering gerr@mepdedu ME 448/548: D
Physically Based Rendering ( ) Geometry and Transformations
 Geometry and Transformations") Phsicall Based Rendering (6.657) Geometr and Transformations 3D Point Specifies a location Origin 3D Point Specifies a location Represented b three coordinates Infinitel small class Point3D { public: Coordinate
Phsicall Based Rendering (6.657) Geometr and Transformations 3D Point Specifies a location Origin 3D Point Specifies a location Represented b three coordinates Infinitel small class Point3D { public: Coordinate
UNCORRECTED SAMPLE PAGES. 3Quadratics. Chapter 3. Objectives
 Chapter 3 3Quadratics Objectives To recognise and sketch the graphs of quadratic polnomials. To find the ke features of the graph of a quadratic polnomial: ais intercepts, turning point and ais of smmetr.
Chapter 3 3Quadratics Objectives To recognise and sketch the graphs of quadratic polnomials. To find the ke features of the graph of a quadratic polnomial: ais intercepts, turning point and ais of smmetr.
TENSOR TRANSFORMATION OF STRESSES
 GG303 Lecture 18 9/4/01 1 TENSOR TRANSFORMATION OF STRESSES Transformation of stresses between planes of arbitrar orientation In the 2-D eample of lecture 16, the normal and shear stresses (tractions)
GG303 Lecture 18 9/4/01 1 TENSOR TRANSFORMATION OF STRESSES Transformation of stresses between planes of arbitrar orientation In the 2-D eample of lecture 16, the normal and shear stresses (tractions)
Introduction to 3D Game Programming with DirectX 9.0c: A Shader Approach
 Introduction to 3D Game Programming with DirectX 90c: A Shader Approach Part I Solutions Note : Please email to frank@moon-labscom if ou find an errors Note : Use onl after ou have tried, and struggled
Introduction to 3D Game Programming with DirectX 90c: A Shader Approach Part I Solutions Note : Please email to frank@moon-labscom if ou find an errors Note : Use onl after ou have tried, and struggled
Affine transformations
 Reading Required: Affine transformations Brian Curless CSEP 557 Fall 2016 Angel 3.1, 3.7-3.11 Further reading: Angel, the rest of Chapter 3 Fole, et al, Chapter 5.1-5.5. David F. Rogers and J. Alan Adams,
Reading Required: Affine transformations Brian Curless CSEP 557 Fall 2016 Angel 3.1, 3.7-3.11 Further reading: Angel, the rest of Chapter 3 Fole, et al, Chapter 5.1-5.5. David F. Rogers and J. Alan Adams,
Mathematical Foundations: Intro
 Mathematical Foundations: Intro Graphics relies on 3 basic objects: 1. Scalars 2. Vectors 3. Points Mathematically defined in terms of spaces: 1. Vector space 2. Affine space 3. Euclidean space Math required:
Mathematical Foundations: Intro Graphics relies on 3 basic objects: 1. Scalars 2. Vectors 3. Points Mathematically defined in terms of spaces: 1. Vector space 2. Affine space 3. Euclidean space Math required:
Image Transform. Panorama Image (Keller+Lind Hall)
") Image Transform Panorama Image (Keller+Lind Hall) Image Warping (Coordinate Transform) u I v 1 I 2 I ( v) = I ( u) 2 1 Image Warping (Coordinate Transform) u I v 1 I 2 I ( v) = I ( u) 2 1 : Piel transport
Image Transform Panorama Image (Keller+Lind Hall) Image Warping (Coordinate Transform) u I v 1 I 2 I ( v) = I ( u) 2 1 Image Warping (Coordinate Transform) u I v 1 I 2 I ( v) = I ( u) 2 1 : Piel transport
1 HOMOGENEOUS TRANSFORMATIONS
 HOMOGENEOUS TRANSFORMATIONS Purpose: The purpose of this chapter is to introduce ou to the Homogeneous Transformation. This simple 4 4 transformation is used in the geometr engines of CAD sstems and in
HOMOGENEOUS TRANSFORMATIONS Purpose: The purpose of this chapter is to introduce ou to the Homogeneous Transformation. This simple 4 4 transformation is used in the geometr engines of CAD sstems and in
Eigenvectors and Eigenvalues 1
 Ma 2015 page 1 Eigenvectors and Eigenvalues 1 In this handout, we will eplore eigenvectors and eigenvalues. We will begin with an eploration, then provide some direct eplanation and worked eamples, and
Ma 2015 page 1 Eigenvectors and Eigenvalues 1 In this handout, we will eplore eigenvectors and eigenvalues. We will begin with an eploration, then provide some direct eplanation and worked eamples, and
Mathematics 309 Conic sections and their applicationsn. Chapter 2. Quadric figures. ai,j x i x j + b i x i + c =0. 1. Coordinate changes
 Mathematics 309 Conic sections and their applicationsn Chapter 2. Quadric figures In this chapter want to outline quickl how to decide what figure associated in 2D and 3D to quadratic equations look like.
Mathematics 309 Conic sections and their applicationsn Chapter 2. Quadric figures In this chapter want to outline quickl how to decide what figure associated in 2D and 3D to quadratic equations look like.
ECE 468: Digital Image Processing. Lecture 2
 ECE 468: Digital Image Processing Lecture 2 Prof. Sinisa Todorovic sinisa@eecs.oregonstate.edu Outline Image interpolation MATLAB tutorial Review of image elements Affine transforms of images Spatial-domain
ECE 468: Digital Image Processing Lecture 2 Prof. Sinisa Todorovic sinisa@eecs.oregonstate.edu Outline Image interpolation MATLAB tutorial Review of image elements Affine transforms of images Spatial-domain
IMAGE WARPING APPLICATIONS. register multiple images (registration) correct system distortions. register image to map (rectification)
 correct system distortions. register image to map (rectification)") APPLICATIONS IMAGE WARPING N correct system distortions Rectification of Landsat TM image register multiple images (registration) original register image to map (rectification) N fill Speedway rectified
APPLICATIONS IMAGE WARPING N correct system distortions Rectification of Landsat TM image register multiple images (registration) original register image to map (rectification) N fill Speedway rectified
MMJ1153 COMPUTATIONAL METHOD IN SOLID MECHANICS PRELIMINARIES TO FEM
 B Course Content: A INTRODUCTION AND OVERVIEW Numerical method and Computer-Aided Engineering; Phsical problems; Mathematical models; Finite element method;. B Elements and nodes, natural coordinates,
B Course Content: A INTRODUCTION AND OVERVIEW Numerical method and Computer-Aided Engineering; Phsical problems; Mathematical models; Finite element method;. B Elements and nodes, natural coordinates,
ME 7502 Lecture 2 Effective Properties of Particulate and Unidirectional Composites
 ME 75 Lecture Effective Properties of Particulate and Unidirectional Composites Concepts from Elasticit Theor Statistical Homogeneit, Representative Volume Element, Composite Material Effective Stress-
ME 75 Lecture Effective Properties of Particulate and Unidirectional Composites Concepts from Elasticit Theor Statistical Homogeneit, Representative Volume Element, Composite Material Effective Stress-
Polynomial and Rational Functions
 Name Date Chapter Polnomial and Rational Functions Section.1 Quadratic Functions Objective: In this lesson ou learned how to sketch and analze graphs of quadratic functions. Important Vocabular Define
Name Date Chapter Polnomial and Rational Functions Section.1 Quadratic Functions Objective: In this lesson ou learned how to sketch and analze graphs of quadratic functions. Important Vocabular Define
LESSON 35: EIGENVALUES AND EIGENVECTORS APRIL 21, (1) We might also write v as v. Both notations refer to a vector.
 We might also write v as v. Both notations refer to a vector.") LESSON 5: EIGENVALUES AND EIGENVECTORS APRIL 2, 27 In this contet, a vector is a column matri E Note 2 v 2, v 4 5 6 () We might also write v as v Both notations refer to a vector (2) A vector can be man
LESSON 5: EIGENVALUES AND EIGENVECTORS APRIL 2, 27 In this contet, a vector is a column matri E Note 2 v 2, v 4 5 6 () We might also write v as v Both notations refer to a vector (2) A vector can be man
Linear and affine transformations
 Linear and affine transformations Linear Algebra Review Matrices Transformations Affine transformations in Euclidean space 1 The linear transformation given b a matri Let A be an mn matri. The function
Linear and affine transformations Linear Algebra Review Matrices Transformations Affine transformations in Euclidean space 1 The linear transformation given b a matri Let A be an mn matri. The function
Some linear transformations on R 2 Math 130 Linear Algebra D Joyce, Fall 2013
 Some linear transformations on R 2 Math 3 Linear Algebra D Joce, Fall 23 Let s look at some some linear transformations on the plane R 2. We ll look at several kinds of operators on R 2 including reflections,
Some linear transformations on R 2 Math 3 Linear Algebra D Joce, Fall 23 Let s look at some some linear transformations on the plane R 2. We ll look at several kinds of operators on R 2 including reflections,
Lecture 4: Affine Transformations. for Satan himself is transformed into an angel of light. 2 Corinthians 11:14
 Lecture 4: Affine Transformations for Satan himself is transformed into an angel of light. 2 Corinthians 11:14 1. Transformations Transformations are the lifeblood of geometry. Euclidean geometry is based
Lecture 4: Affine Transformations for Satan himself is transformed into an angel of light. 2 Corinthians 11:14 1. Transformations Transformations are the lifeblood of geometry. Euclidean geometry is based
Demonstrate solution methods for systems of linear equations. Show that a system of equations can be represented in matrix-vector form.
 Chapter Linear lgebra Objective Demonstrate solution methods for sstems of linear equations. Show that a sstem of equations can be represented in matri-vector form. 4 Flowrates in kmol/hr Figure.: Two
Chapter Linear lgebra Objective Demonstrate solution methods for sstems of linear equations. Show that a sstem of equations can be represented in matri-vector form. 4 Flowrates in kmol/hr Figure.: Two
Homework Solutions Week of November = 1(1) + 0(x 1) + 0(x 1) 2 x = 1(1) + 1(x 1) + 0(x 1) 2 x 2 = 1(1) + 2(x 1) + 1(x 1) 2
 + 0(x 1) + 0(x 1) 2 x = 1(1) + 1(x 1) + 0(x 1) 2 x 2 = 1(1) + 2(x 1) + 1(x 1) 2") Math 34/84: Matrix heor Dr S Cooper Fall 8 Section 63: Homework Solutions Week of November 8 (7) he sets B { x (x ) } C { x x } are both bases for P We need to find [p(x) B Observe that () + (x ) + (x
Math 34/84: Matrix heor Dr S Cooper Fall 8 Section 63: Homework Solutions Week of November 8 (7) he sets B { x (x ) } C { x x } are both bases for P We need to find [p(x) B Observe that () + (x ) + (x
The spatial frequency domain
 The spatial frequenc /3/5 wk9-a- Recall: plane wave propagation λ z= θ path dela increases linearl with E ep i2π sinθ + λ z i2π cosθ λ z plane of observation /3/5 wk9-a-2 Spatial frequenc angle of propagation?
The spatial frequenc /3/5 wk9-a- Recall: plane wave propagation λ z= θ path dela increases linearl with E ep i2π sinθ + λ z i2π cosθ λ z plane of observation /3/5 wk9-a-2 Spatial frequenc angle of propagation?
Second-Order Linear Differential Equations C 2
 C8 APPENDIX C Additional Topics in Differential Equations APPENDIX C. Second-Order Homogeneous Linear Equations Second-Order Linear Differential Equations Higher-Order Linear Differential Equations Application
C8 APPENDIX C Additional Topics in Differential Equations APPENDIX C. Second-Order Homogeneous Linear Equations Second-Order Linear Differential Equations Higher-Order Linear Differential Equations Application
MAE 82 Engineering Mathematics
 Class otes : First Order Differential Equation on Linear AE 8 Engineering athematics Universe on Linear umerical Linearization on Linear Special Cases Analtical o General Solution Linear Analtical General
Class otes : First Order Differential Equation on Linear AE 8 Engineering athematics Universe on Linear umerical Linearization on Linear Special Cases Analtical o General Solution Linear Analtical General
COMP 175 COMPUTER GRAPHICS. Lecture 04: Transform 1. COMP 175: Computer Graphics February 9, Erik Anderson 04 Transform 1
 Lecture 04: Transform COMP 75: Computer Graphics February 9, 206 /59 Admin Sign up via email/piazza for your in-person grading Anderson@cs.tufts.edu 2/59 Geometric Transform Apply transforms to a hierarchy
Lecture 04: Transform COMP 75: Computer Graphics February 9, 206 /59 Admin Sign up via email/piazza for your in-person grading Anderson@cs.tufts.edu 2/59 Geometric Transform Apply transforms to a hierarchy
Reading. Affine transformations. Vector representation. Geometric transformations. x y z. x y. Required: Angel 4.1, Further reading:
 Reading Required: Angel 4.1, 4.6-4.10 Further reading: Affine transformations Angel, the rest of Chapter 4 Fole, et al, Chapter 5.1-5.5. David F. Rogers and J. Alan Adams, Mathematical Elements for Computer
Reading Required: Angel 4.1, 4.6-4.10 Further reading: Affine transformations Angel, the rest of Chapter 4 Fole, et al, Chapter 5.1-5.5. David F. Rogers and J. Alan Adams, Mathematical Elements for Computer
6.869 Advances in Computer Vision. Prof. Bill Freeman March 1, 2005
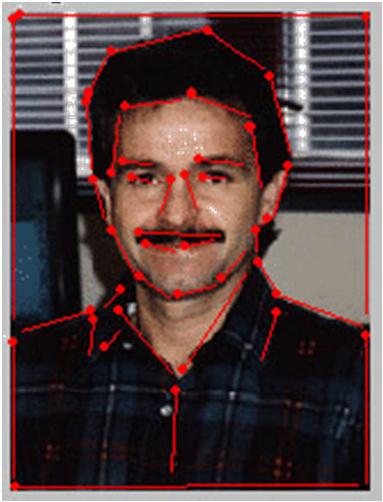
 6.869 Advances in Computer Vision Prof. Bill Freeman March 1 2005 1 2 Local Features Matching points across images important for: object identification instance recognition object class recognition pose
6.869 Advances in Computer Vision Prof. Bill Freeman March 1 2005 1 2 Local Features Matching points across images important for: object identification instance recognition object class recognition pose
Lines and points. Lines and points
 omogeneous coordinates in the plane Homogeneous coordinates in the plane A line in the plane a + by + c is represented as (a, b, c). A line is a subset of points in the plane. All vectors (ka, kb, kc)
omogeneous coordinates in the plane Homogeneous coordinates in the plane A line in the plane a + by + c is represented as (a, b, c). A line is a subset of points in the plane. All vectors (ka, kb, kc)
CSE 167: Introduction to Computer Graphics Lecture #2: Linear Algebra Primer
 CSE 167: Introduction to Computer Graphics Lecture #2: Linear Algebra Primer Jürgen P. Schulze, Ph.D. University of California, San Diego Fall Quarter 2016 Announcements Monday October 3: Discussion Assignment
CSE 167: Introduction to Computer Graphics Lecture #2: Linear Algebra Primer Jürgen P. Schulze, Ph.D. University of California, San Diego Fall Quarter 2016 Announcements Monday October 3: Discussion Assignment
Metric-based classifiers. Nuno Vasconcelos UCSD
 Metric-based classifiers Nuno Vasconcelos UCSD Statistical learning goal: given a function f. y f and a collection of eample data-points, learn what the function f. is. this is called training. two major
Metric-based classifiers Nuno Vasconcelos UCSD Statistical learning goal: given a function f. y f and a collection of eample data-points, learn what the function f. is. this is called training. two major
Homogeneous Transformations
 Purpose: Homogeneous Transformations The purpose of this chapter is to introduce you to the Homogeneous Transformation. This simple 4 x 4 transformation is used in the geometry engines of CAD systems and
Purpose: Homogeneous Transformations The purpose of this chapter is to introduce you to the Homogeneous Transformation. This simple 4 x 4 transformation is used in the geometry engines of CAD systems and
Determinants. We said in Section 3.3 that a 2 2 matrix a b. Determinant of an n n Matrix
 3.6 Determinants We said in Section 3.3 that a 2 2 matri a b is invertible if and onl if its c d erminant, ad bc, is nonzero, and we saw the erminant used in the formula for the inverse of a 2 2 matri.
3.6 Determinants We said in Section 3.3 that a 2 2 matri a b is invertible if and onl if its c d erminant, ad bc, is nonzero, and we saw the erminant used in the formula for the inverse of a 2 2 matri.
MA8502 Numerical solution of partial differential equations. The Poisson problem: Mixed Dirichlet/Neumann boundary conditions along curved boundaries
 MA85 Numerical solution of partial differential equations The Poisson problem: Mied Dirichlet/Neumann boundar conditions along curved boundaries Fall c Einar M. Rønquist Department of Mathematical Sciences
MA85 Numerical solution of partial differential equations The Poisson problem: Mied Dirichlet/Neumann boundar conditions along curved boundaries Fall c Einar M. Rønquist Department of Mathematical Sciences
CSE 167: Introduction to Computer Graphics Lecture #2: Linear Algebra Primer
 CSE 167: Introduction to Computer Graphics Lecture #2: Linear Algebra Primer Jürgen P. Schulze, Ph.D. University of California, San Diego Spring Quarter 2016 Announcements Project 1 due next Friday at
CSE 167: Introduction to Computer Graphics Lecture #2: Linear Algebra Primer Jürgen P. Schulze, Ph.D. University of California, San Diego Spring Quarter 2016 Announcements Project 1 due next Friday at
Created by T. Madas. Candidates may use any calculator allowed by the regulations of this examination.
 IYGB GCE Mathematics SYN Advanced Level Snoptic Paper C Difficult Rating: 3.895 Time: 3 hours Candidates ma use an calculator allowed b the regulations of this eamination. Information for Candidates This
IYGB GCE Mathematics SYN Advanced Level Snoptic Paper C Difficult Rating: 3.895 Time: 3 hours Candidates ma use an calculator allowed b the regulations of this eamination. Information for Candidates This
The notes cover linear operators and discuss linear independence of functions (Boas ).
.") Linear Operators Hsiu-Hau Lin hsiuhau@phsnthuedutw Mar 25, 2010 The notes cover linear operators and discuss linear independence of functions Boas 37-38 Linear operators An operator maps one thing into
Linear Operators Hsiu-Hau Lin hsiuhau@phsnthuedutw Mar 25, 2010 The notes cover linear operators and discuss linear independence of functions Boas 37-38 Linear operators An operator maps one thing into
ZETA MATHS. Higher Mathematics Revision Checklist
 ZETA MATHS Higher Mathematics Revision Checklist Contents: Epressions & Functions Page Logarithmic & Eponential Functions Addition Formulae. 3 Wave Function.... 4 Graphs of Functions. 5 Sets of Functions
ZETA MATHS Higher Mathematics Revision Checklist Contents: Epressions & Functions Page Logarithmic & Eponential Functions Addition Formulae. 3 Wave Function.... 4 Graphs of Functions. 5 Sets of Functions
Chapter Adequacy of Solutions
 Chapter 04.09 dequac of Solutions fter reading this chapter, ou should be able to: 1. know the difference between ill-conditioned and well-conditioned sstems of equations,. define the norm of a matri,
Chapter 04.09 dequac of Solutions fter reading this chapter, ou should be able to: 1. know the difference between ill-conditioned and well-conditioned sstems of equations,. define the norm of a matri,
Chapter 8. Rigid transformations
 Chapter 8. Rigid transformations We are about to start drawing figures in 3D. There are no built-in routines for this purpose in PostScript, and we shall have to start more or less from scratch in extending
Chapter 8. Rigid transformations We are about to start drawing figures in 3D. There are no built-in routines for this purpose in PostScript, and we shall have to start more or less from scratch in extending
National Quali cations
 National Quali cations AH08 X747/77/ Mathematics THURSDAY, MAY 9:00 AM :00 NOON Total marks 00 Attempt ALL questions. You may use a calculator. Full credit will be given only to solutions which contain
National Quali cations AH08 X747/77/ Mathematics THURSDAY, MAY 9:00 AM :00 NOON Total marks 00 Attempt ALL questions. You may use a calculator. Full credit will be given only to solutions which contain
Lecture 8: Coordinate Frames. CITS3003 Graphics & Animation
 Lecture 8: Coordinate Frames CITS3003 Graphics & Animation E. Angel and D. Shreiner: Interactive Computer Graphics 6E Addison-Wesley 2012 Objectives Learn how to define and change coordinate frames Introduce
Lecture 8: Coordinate Frames CITS3003 Graphics & Animation E. Angel and D. Shreiner: Interactive Computer Graphics 6E Addison-Wesley 2012 Objectives Learn how to define and change coordinate frames Introduce
27 ft 3 adequately describes the volume of a cube with side 3. ft F adequately describes the temperature of a person.
 VECTORS The stud of ectors is closel related to the stud of such phsical properties as force, motion, elocit, and other related topics. Vectors allow us to model certain characteristics of these phenomena
VECTORS The stud of ectors is closel related to the stud of such phsical properties as force, motion, elocit, and other related topics. Vectors allow us to model certain characteristics of these phenomena
Geometric Stiffness Effects in 2D and 3D Frames
 Geometric Stiffness Effects in D and 3D Frames CEE 41. Matrix Structural Analsis Department of Civil and Environmental Engineering Duke Universit Henri Gavin Fall, 1 In situations in which deformations
Geometric Stiffness Effects in D and 3D Frames CEE 41. Matrix Structural Analsis Department of Civil and Environmental Engineering Duke Universit Henri Gavin Fall, 1 In situations in which deformations
CHAPTER 3 Applications of Differentiation
 CHAPTER Applications of Differentiation Section. Etrema on an Interval................... 0 Section. Rolle s Theorem and the Mean Value Theorem...... 0 Section. Increasing and Decreasing Functions and
CHAPTER Applications of Differentiation Section. Etrema on an Interval................... 0 Section. Rolle s Theorem and the Mean Value Theorem...... 0 Section. Increasing and Decreasing Functions and
Computer Graphics: 2D Transformations. Course Website:
 Computer Graphics: D Transformations Course Website: http://www.comp.dit.ie/bmacnamee 5 Contents Wh transformations Transformations Translation Scaling Rotation Homogeneous coordinates Matri multiplications
Computer Graphics: D Transformations Course Website: http://www.comp.dit.ie/bmacnamee 5 Contents Wh transformations Transformations Translation Scaling Rotation Homogeneous coordinates Matri multiplications
15. Eigenvalues, Eigenvectors
 5 Eigenvalues, Eigenvectors Matri of a Linear Transformation Consider a linear ( transformation ) L : a b R 2 R 2 Suppose we know that L and L Then c d because of linearit, we can determine what L does
5 Eigenvalues, Eigenvectors Matri of a Linear Transformation Consider a linear ( transformation ) L : a b R 2 R 2 Suppose we know that L and L Then c d because of linearit, we can determine what L does
5. Nonholonomic constraint Mechanics of Manipulation
 5. Nonholonomic constraint Mechanics of Manipulation Matt Mason matt.mason@cs.cmu.edu http://www.cs.cmu.edu/~mason Carnegie Mellon Lecture 5. Mechanics of Manipulation p.1 Lecture 5. Nonholonomic constraint.
5. Nonholonomic constraint Mechanics of Manipulation Matt Mason matt.mason@cs.cmu.edu http://www.cs.cmu.edu/~mason Carnegie Mellon Lecture 5. Mechanics of Manipulation p.1 Lecture 5. Nonholonomic constraint.
MULTIPLE CHOICE. Choose the one alternative that best completes the statement or answers the question.
 Semester 1Eam Name MULTIPLE CHOICE. Choose the one alternative that best completes the statement or answers the question. Answer the question. 1) Which one of the equations below matches the graph? 1)
Semester 1Eam Name MULTIPLE CHOICE. Choose the one alternative that best completes the statement or answers the question. Answer the question. 1) Which one of the equations below matches the graph? 1)
Least squares contour alignment
 Least squares contour alignment Ivan Markovsky and Sasan Mahmoodi School of Electronics and Computer Science University of Southampton, SO7 BJ, UK Emails: {im,sm3}@ecssotonacuk Abstract The contour alignment
Least squares contour alignment Ivan Markovsky and Sasan Mahmoodi School of Electronics and Computer Science University of Southampton, SO7 BJ, UK Emails: {im,sm3}@ecssotonacuk Abstract The contour alignment
CS 335 Graphics and Multimedia. 2D Graphics Primitives and Transformation
 C 335 Graphics and Multimedia D Graphics Primitives and Transformation Basic Mathematical Concepts Review Coordinate Reference Frames D Cartesian Reference Frames (a) (b) creen Cartesian reference sstems
C 335 Graphics and Multimedia D Graphics Primitives and Transformation Basic Mathematical Concepts Review Coordinate Reference Frames D Cartesian Reference Frames (a) (b) creen Cartesian reference sstems
KINEMATIC RELATIONS IN DEFORMATION OF SOLIDS
 Chapter 8 KINEMATIC RELATIONS IN DEFORMATION OF SOLIDS Figure 8.1: 195 196 CHAPTER 8. KINEMATIC RELATIONS IN DEFORMATION OF SOLIDS 8.1 Motivation In Chapter 3, the conservation of linear momentum for a
Chapter 8 KINEMATIC RELATIONS IN DEFORMATION OF SOLIDS Figure 8.1: 195 196 CHAPTER 8. KINEMATIC RELATIONS IN DEFORMATION OF SOLIDS 8.1 Motivation In Chapter 3, the conservation of linear momentum for a
Linear algebra in turn is built on two basic elements, MATRICES and VECTORS.
 M-Lecture():.-. Linear algebra provides concepts that are crucial to man areas of information technolog and computing, including: Graphics Image processing Crptograph Machine learning Computer vision Optimiation
M-Lecture():.-. Linear algebra provides concepts that are crucial to man areas of information technolog and computing, including: Graphics Image processing Crptograph Machine learning Computer vision Optimiation
CS 4300 Computer Graphics. Prof. Harriet Fell Fall 2011 Lecture 11 September 29, 2011
 CS 4300 Computer Graphics Prof. Harriet Fell Fall 2011 Lecture 11 September 29, 2011 October 8, 2011 College of Computer and Information Science, Northeastern Universit 1 Toda s Topics Linear Algebra Review
CS 4300 Computer Graphics Prof. Harriet Fell Fall 2011 Lecture 11 September 29, 2011 October 8, 2011 College of Computer and Information Science, Northeastern Universit 1 Toda s Topics Linear Algebra Review
Lecture 13: Matrix Representations for Affine and Projective Transformations
 Lecture 13: Matrix Representations for Affine and Projective Transformations thou shalt set apart unto the LORD all that openeth the matrix Exodus 13:12 1 Matrix Representations for Affine Transformations
Lecture 13: Matrix Representations for Affine and Projective Transformations thou shalt set apart unto the LORD all that openeth the matrix Exodus 13:12 1 Matrix Representations for Affine Transformations
Answer Explanations. The SAT Subject Tests. Mathematics Level 1 & 2 TO PRACTICE QUESTIONS FROM THE SAT SUBJECT TESTS STUDENT GUIDE
 The SAT Subject Tests Answer Eplanations TO PRACTICE QUESTIONS FROM THE SAT SUBJECT TESTS STUDENT GUIDE Mathematics Level & Visit sat.org/stpractice to get more practice and stud tips for the Subject Test
The SAT Subject Tests Answer Eplanations TO PRACTICE QUESTIONS FROM THE SAT SUBJECT TESTS STUDENT GUIDE Mathematics Level & Visit sat.org/stpractice to get more practice and stud tips for the Subject Test
Designing Information Devices and Systems I Fall 2015 Anant Sahai, Ali Niknejad Homework 2. This homework is due September 14, 2015, at Noon.
 EECS 16A Designing Information Devices and Systems I Fall 2015 Anant Sahai, Ali Niknejad Homework 2 This homework is due September 14, 2015, at Noon. Submission Format Your homework submission should consist
EECS 16A Designing Information Devices and Systems I Fall 2015 Anant Sahai, Ali Niknejad Homework 2 This homework is due September 14, 2015, at Noon. Submission Format Your homework submission should consist
Lecture 4.2 Finite Difference Approximation
 Lecture 4. Finite Difference Approimation 1 Discretization As stated in Lecture 1.0, there are three steps in numerically solving the differential equations. They are: 1. Discretization of the domain by
Lecture 4. Finite Difference Approimation 1 Discretization As stated in Lecture 1.0, there are three steps in numerically solving the differential equations. They are: 1. Discretization of the domain by
6-1 Study Guide and Intervention
 NAME DATE PERID 6- Stud Guide and Intervention Graphing Sstems of Equations Possible Number of Solutions Two or more linear equations involving the same variables form a sstem of equations. A solution
NAME DATE PERID 6- Stud Guide and Intervention Graphing Sstems of Equations Possible Number of Solutions Two or more linear equations involving the same variables form a sstem of equations. A solution
5A Exponential functions
 Chapter 5 5 Eponential and logarithmic functions bjectives To graph eponential and logarithmic functions and transformations of these functions. To introduce Euler s number e. To revise the inde and logarithm
Chapter 5 5 Eponential and logarithmic functions bjectives To graph eponential and logarithmic functions and transformations of these functions. To introduce Euler s number e. To revise the inde and logarithm
In this chapter a student has to learn the Concept of adjoint of a matrix. Inverse of a matrix. Rank of a matrix and methods finding these.
 MATRICES UNIT STRUCTURE.0 Objectives. Introduction. Definitions. Illustrative eamples.4 Rank of matri.5 Canonical form or Normal form.6 Normal form PAQ.7 Let Us Sum Up.8 Unit End Eercise.0 OBJECTIVES In
MATRICES UNIT STRUCTURE.0 Objectives. Introduction. Definitions. Illustrative eamples.4 Rank of matri.5 Canonical form or Normal form.6 Normal form PAQ.7 Let Us Sum Up.8 Unit End Eercise.0 OBJECTIVES In
Linear Algebra & Geometry why is linear algebra useful in computer vision?
 Linear Algebra & Geometry why is linear algebra useful in computer vision? References: -Any book on linear algebra! -[HZ] chapters 2, 4 Some of the slides in this lecture are courtesy to Prof. Octavia
Linear Algebra & Geometry why is linear algebra useful in computer vision? References: -Any book on linear algebra! -[HZ] chapters 2, 4 Some of the slides in this lecture are courtesy to Prof. Octavia
32 +( 2) ( 4) ( 2)
 ( 4) ( 2)") Math 241 Exam 1 Sample 2 Solutions 1. (a) If ā = 3î 2ĵ+1ˆk and b = 4î+0ĵ 2ˆk, find the sine and cosine of the angle θ between [10 pts] ā and b. We know that ā b = ā b cosθ and so cosθ = ā b ā b = (3)(
Math 241 Exam 1 Sample 2 Solutions 1. (a) If ā = 3î 2ĵ+1ˆk and b = 4î+0ĵ 2ˆk, find the sine and cosine of the angle θ between [10 pts] ā and b. We know that ā b = ā b cosθ and so cosθ = ā b ā b = (3)(
Lecture 4: Affine Transformations. for Satan himself is transformed into an angel of light. 2 Corinthians 11:14
 Lecture 4: Affine Transformations for Satan himself is transformed into an angel of light. 2 Corinthians 11:14 1. Transformations Transformations are the lifeblood of geometry. Euclidean geometry is based
Lecture 4: Affine Transformations for Satan himself is transformed into an angel of light. 2 Corinthians 11:14 1. Transformations Transformations are the lifeblood of geometry. Euclidean geometry is based
Morphing. Xiao-Ming Fu
 Morphing Xiao-Ming Fu Outlines Definition Angle, length, area, volume, and curvature Example-Driven Deformations Based on Discrete Shells Affine transformation As-Rigid-As-Possible Shape Interpolation
Morphing Xiao-Ming Fu Outlines Definition Angle, length, area, volume, and curvature Example-Driven Deformations Based on Discrete Shells Affine transformation As-Rigid-As-Possible Shape Interpolation
Linear Algebra II. 7 Inner product spaces. Notes 7 16th December Inner products and orthonormal bases
 MTH6140 Linear Algebra II Notes 7 16th December 2010 7 Inner product spaces Ordinary Euclidean space is a 3-dimensional vector space over R, but it is more than that: the extra geometric structure (lengths,
MTH6140 Linear Algebra II Notes 7 16th December 2010 7 Inner product spaces Ordinary Euclidean space is a 3-dimensional vector space over R, but it is more than that: the extra geometric structure (lengths,
MATRIX TRANSFORMATIONS
 CHAPTER 5. MATRIX TRANSFORMATIONS INSTITIÚID TEICNEOLAÍOCHTA CHEATHARLACH INSTITUTE OF TECHNOLOGY CARLOW MATRIX TRANSFORMATIONS Matri Transformations Definition Let A and B be sets. A function f : A B
CHAPTER 5. MATRIX TRANSFORMATIONS INSTITIÚID TEICNEOLAÍOCHTA CHEATHARLACH INSTITUTE OF TECHNOLOGY CARLOW MATRIX TRANSFORMATIONS Matri Transformations Definition Let A and B be sets. A function f : A B
Precalculus Spring Final Review Name
 Precalculus Spring Final Review Name Solve the equation on the interval 0 θ < ". ) sin θ + sin θ = 0 A) 0, ", " 3, 5" 3 B) 0, ", 3" C) 0, ", " 3, " 3 D) 0, ", " 3, 5" 3 SHORT ANSWER. Answer the question.
Precalculus Spring Final Review Name Solve the equation on the interval 0 θ < ". ) sin θ + sin θ = 0 A) 0, ", " 3, 5" 3 B) 0, ", 3" C) 0, ", " 3, " 3 D) 0, ", " 3, 5" 3 SHORT ANSWER. Answer the question.
Chapter 12: Iterative Methods
 ES 40: Scientific and Engineering Computation. Uchechukwu Ofoegbu Temple University Chapter : Iterative Methods ES 40: Scientific and Engineering Computation. Gauss-Seidel Method The Gauss-Seidel method
ES 40: Scientific and Engineering Computation. Uchechukwu Ofoegbu Temple University Chapter : Iterative Methods ES 40: Scientific and Engineering Computation. Gauss-Seidel Method The Gauss-Seidel method
Subband Coding and Wavelets. National Chiao Tung University Chun-Jen Tsai 12/04/2014
 Subband Coding and Wavelets National Chiao Tung Universit Chun-Jen Tsai /4/4 Concept of Subband Coding In transform coding, we use N (or N N) samples as the data transform unit Transform coefficients are
Subband Coding and Wavelets National Chiao Tung Universit Chun-Jen Tsai /4/4 Concept of Subband Coding In transform coding, we use N (or N N) samples as the data transform unit Transform coefficients are
UNCORRECTED. To recognise the rules of a number of common algebraic relations: y = x 1 y 2 = x
 5A galler of graphs Objectives To recognise the rules of a number of common algebraic relations: = = = (rectangular hperbola) + = (circle). To be able to sketch the graphs of these relations. To be able
5A galler of graphs Objectives To recognise the rules of a number of common algebraic relations: = = = (rectangular hperbola) + = (circle). To be able to sketch the graphs of these relations. To be able
Optical flow. Subhransu Maji. CMPSCI 670: Computer Vision. October 20, 2016
 Optical flow Subhransu Maji CMPSC 670: Computer Vision October 20, 2016 Visual motion Man slides adapted from S. Seitz, R. Szeliski, M. Pollefes CMPSC 670 2 Motion and perceptual organization Sometimes,
Optical flow Subhransu Maji CMPSC 670: Computer Vision October 20, 2016 Visual motion Man slides adapted from S. Seitz, R. Szeliski, M. Pollefes CMPSC 670 2 Motion and perceptual organization Sometimes,
Exact Equations. M(x,y) + N(x,y) y = 0, M(x,y) dx + N(x,y) dy = 0. M(x,y) + N(x,y) y = 0
 + N(x,y) y = 0, M(x,y) dx + N(x,y) dy = 0. M(x,y) + N(x,y) y = 0") Eact Equations An eact equation is a first order differential equation that can be written in the form M(, + N(,, provided that there eists a function ψ(, such that = M (, and N(, = Note : Often the equation
Eact Equations An eact equation is a first order differential equation that can be written in the form M(, + N(,, provided that there eists a function ψ(, such that = M (, and N(, = Note : Often the equation
CHAPTER 3 Applications of Differentiation
 CHAPTER Applications of Differentiation Section. Etrema on an Interval.............. 0 Section. Rolle s Theorem and the Mean Value Theorem. 07 Section. Increasing and Decreasing Functions and the First
CHAPTER Applications of Differentiation Section. Etrema on an Interval.............. 0 Section. Rolle s Theorem and the Mean Value Theorem. 07 Section. Increasing and Decreasing Functions and the First
EFFECT OF DAMPING AND THERMAL GRADIENT ON VIBRATIONS OF ORTHOTROPIC RECTANGULAR PLATE OF VARIABLE THICKNESS
 Available at http://pvamu.edu/aam Appl. Appl. Math. ISSN: 193-9466 Vol. 1, Issue 1 (June 17), pp. 1-16 Applications and Applied Mathematics: An International Journal (AAM) EFFECT OF DAMPING AND THERMAL
Available at http://pvamu.edu/aam Appl. Appl. Math. ISSN: 193-9466 Vol. 1, Issue 1 (June 17), pp. 1-16 Applications and Applied Mathematics: An International Journal (AAM) EFFECT OF DAMPING AND THERMAL
Detailed Derivation of Theory of Hierarchical Data-driven Descent
 Detailed Derivation of Theory of Hierarchical Data-driven Descent Yuandong Tian and Srinivasa G. Narasimhan Carnegie Mellon University 5000 Forbes Ave, Pittsburgh, PA 15213 {yuandong, srinivas}@cs.cmu.edu
Detailed Derivation of Theory of Hierarchical Data-driven Descent Yuandong Tian and Srinivasa G. Narasimhan Carnegie Mellon University 5000 Forbes Ave, Pittsburgh, PA 15213 {yuandong, srinivas}@cs.cmu.edu
Review of Essential Skills and Knowledge
 Review of Essential Skills and Knowledge R Eponent Laws...50 R Epanding and Simplifing Polnomial Epressions...5 R 3 Factoring Polnomial Epressions...5 R Working with Rational Epressions...55 R 5 Slope
Review of Essential Skills and Knowledge R Eponent Laws...50 R Epanding and Simplifing Polnomial Epressions...5 R 3 Factoring Polnomial Epressions...5 R Working with Rational Epressions...55 R 5 Slope
Elements of Continuum Elasticity. David M. Parks Mechanics and Materials II February 25, 2004
 Elements of Continuum Elasticity David M. Parks Mechanics and Materials II 2.002 February 25, 2004 Solid Mechanics in 3 Dimensions: stress/equilibrium, strain/displacement, and intro to linear elastic
Elements of Continuum Elasticity David M. Parks Mechanics and Materials II 2.002 February 25, 2004 Solid Mechanics in 3 Dimensions: stress/equilibrium, strain/displacement, and intro to linear elastic