AGC (Chapter 9 of W&W) 1.0 Introduction
|
|
|
- Maude Melton
- 6 years ago
- Views:
Transcription
1 AGC Chapter 9 of W&W.0 Introduction Synchronou generator repond to loadgeneration imbalance by accelerating or decelerating changing peed. For example, when load increae, generation low down, effectively releaing ome of it inertial energy to compenate for the load increae. Liewie, when load decreae, generation peed up, aborbing the overupply a increaed inertial energy. Becaue load i contantly changing, an unregulated ynchronou generator ha highly variable peed reulting in highly variable ytem frequency, an unacceptable ituation becaue: NERC penaltie for poor-performance CPS Load performance can be frequency-dependent Motor peed without a peed-drive Electric cloc Steam-turbine blade may loe life or fail under frequencie that vary from deign level. Some relay are frequency-dependent: Underfrequency load hedding relay Volt per hertz relay Frequency dip may increae for given lo of generation
2 The fact that frequency change with the loadgeneration imbalance give a good way to regulate the imbalance: ue frequency or frequency deviation a a regulation ignal. A given power ytem will have many generator, o we mut balance load with total generation by appropriately regulating each generator in repone to frequency change. A a reult of how power ytem evolved, the load-frequency control problem i even more complex. Initially, there were many iolated interconnection, each one having the problem of balancing it load with it generation. Gradually, in order to enhance reliability, iolated ytem interconnected to ait one another in emergency ituation when one area had inufficient generation, another area could provide aitance by increaing generation to end power to the needy area via tie line.
3 For many year, each area wa called a control area, and you will till find thi term ued quite a lot in the indutry. For example, on page 348 of W&W, the term i defined a An interconnected ytem within which the load and generation will be controlled a per the rule in Fig The rule of Fig. 9.0 are dicued in more depth in Section 4.0 below. The correct terminology now, however, i balancing authority area, which i formally defined by the North American Electric Reliability Council NERC a []: Balancing authority area: The collection of generation, tranmiion, and load within the metered boundarie of the Balancing Authority. The Balancing Authority maintain loadreource balance within thi area. Thi definition require another definition []: Balancing authority: The reponible entity that integrate reource plan ahead of time, maintain load-interchange-generation balance 3
4 within a Balancing Authority Area, and upport Interconnection frequency in real time. Each balancing authority will have it own AGC. The baic function of AGC are identified in Fig 9. of W&W Fig. a below. Fig. a Figure 9. hould alo provide a local loop feeding bac a turbine peed ignal to the input of the generator. An alternative illutration howing thi local loop i given in Fig. b. 4

5 Fig. b.0 Hitorical View The problem of meauring frequency and net tie deviation, and then redipatching generation to mae appropriate correction in frequency and net deviation wa olved many year ago by engineer at General Electric Company, led by a man named Nathan Cohn. Their olution, which in it baic form i till in place today, i referred to a Automatic Generation Control, or AGC. We will tudy their olution in thi ection of the coure. Dr. Cohn wrote an excellent boo on the ubject []. 5
6 3.0 Overview There are two main function of AGC:.Load-frequency control LFC. LFC mut balance the load via two action: a. Maintain ytem frequency b.maintain cheduled export tie line flow.provide ignal to generator for two reaon: a. Economic dipatch via the real-time maret b.security control via contingency analyi Below, Fig. c, illutrate thee function. Fig. c 6
7 A it name implie, AGC i a control function. There are two main level of control:.primary control.secondary control We will tudy each of thee in what follow. To provide you with ome intuition in regard to the main difference between thee two control level, conider a power ytem that uddenly loe a large generation facility. The potcontingency ytem repone, in term of frequency meaured at variou bue in the power ytem, i hown in Fig. b and c. Thi i undertood in the context of Fig a and d. T, Electromagnetic torque Mechanical energy Electrical energy T m, Mechanical torque from turbine Fig. a 7


8 Fig. b: tranient time frame Fig. c: tranient time frame 8

9 Fig. d: Tranient & pot-tranient time frame The following chart identifie the variou time interval aociated with the above figure. 9
10 Fig. e 4.0 Two area A mentioned in Section.0 above, on page 348 of W&W, the term control area i defined a An interconnected ytem within which the load and generation will be controlled a per the 0
11 rule in Fig The rule of Fig. 9.0 are applied to a two-control area ytem a illutrated in Table and Fig. 3 below. Table ω P net int Load change Reulting econdary control action - - P L + P L P L - P L P L 0 P L P L 0 P L - Increae P gen in ytem Decreae P gen in ytem Increae P gen in ytem Decreae P gen in ytem Control area Control area P net int P L =Load change in area P L =Load change in area Fig. 3 The table hould be viewed with the following thought in mind: The above ytem may be conidered to be compried of one control area of interet let ay # on one ide of the tie line and a ret of the world control area on the other ide. The
12 ret of the world control area may be one control area or many. All value are teady-tate value not tranient following governor action primary control but before AGC action econdary control. Since all value are teady-tate value, frequency change ω i the ame throughout the interconnection i.e., the ame ω i een in area a area. Frequency change ω i poitive above 60 Hz when load decreae and negative below 60 Hz when load increae. Change in net interchange, denoted by P net int, i poitive for flow increae from area to area and negative for flow decreae from area to area. The indication in the load change column can be undertood to be the caue of the governor action primary control which reult in the frequency and tie line change. There are two important point that come from tudying the above table of rule :
13 . AGC correct both tie line deviation and frequency deviation.. The tie line and frequency deviation are corrected by AGC in uch a way o that each control area compenate for it own load change. Thee are core concept underlying AGC. 5.0 Interchange The interconnection of different balancing authority area create the following complexity: Given a teady-tate frequency deviation een throughout an interconnection and therefore a load-generation imbalance, how doe an area now whether the imbalance i caued by it own area load or that of another area load? To anwer the lat quetion, it i neceary to provide ome definition []: Summary of term: My term W&W term My ymbol W&W ymbol Net actual interchange AP ij Net chedule interchange SP ij Interchange deviation ΔP ij Actual export Total actual net interchange AP i P net int Scheduled export Scheduled or deired value SP i P net int ched of interchange Net export deviation ΔP i ΔP net int 3
14 Net actual interchange: The algebraic um of all metered interchange over all interconnection between phyically Adjacent Balancing Authority Area. Net cheduled interchange: The algebraic um of all Interchange Schedule acro a given path or between Balancing Authoritie for a given period or intant in time. Interchange chedule: An agreed-upon Interchange Tranaction ize MW, tart & end time, beginning & ending ramp time & rate, & type required for delivery/receipt of power/ energy between Source & Sin Balancing Authoritie involved in the tranaction. We illutrate net actual interchange & net cheduled interchange in Fig. 4 below. A 00 mw 0 mw A Scheduled 50 mw 30 mw 80 mw A3 00 mw Actual Fig. 4 4
15 The word net i ued with actual and cheduled interchange becaue there may be more than one interconnection between two area. The net actual interchange between area: A to A: AP =0 MW A to A: AP =-0 MW A to A3: AP 3 =30 MW A3 to A: AP 3 =-30 MW A to A3: AP 3 =-80 MW A3 to A: AP 3 =80 MW The net cheduled interchange between area: A to A: SP =00 MW A to A: SP =-00 MW A to A3: SP 3 =50 MW A3 to A: SP 3 =-50 MW A to A3: SP 3 =-00 MW A3 to A: SP 3 =00 MW The interchange deviation between two area i Net Actual Interchange-Net Scheduled Interchange We will define thi a ΔP ij, o: ΔP ij =AP ij -SP ij In our example: Area : ΔP =AP -SP =0-00=0 MW ΔP 3 =AP 3 -SP 3 =30-50=-0 MW Area : ΔP =AP -SP =-0--00=-0 MW ΔP 3 =AP 3 -SP 3 = =0 MW 5
16 Area 3: ΔP 3 =AP 3 -SP 3 = =0 MW ΔP 3 =AP 3 -SP 3 =80-00=-0 MW Some obervation:.the net actual interchange may not be what i cheduled due to loop flow. For example, the balancing authoritie may chedule 50 MW from A to A3 but only 30 MW flow on the A-A3 tie line. The other 0 MW flow through A. Thi i called loop flow or inadvertent flow..we may alo define, for an area i, an actual export, a cheduled export, and a net deviation or net export deviation a: Actual Export: Scheduled Export: Net Deviation: n AP i AP ij j ji n SP i SP ij j ji 3 n P i P ij j ji 4 W&W ue different nomenclature/terminology, p. 347: 6
17 Total actual net interchange denoted a P net int to mean actual export. Scheduled or deired value of interchange denoted a P net int ched to mean cheduled export. ΔP net int to mean net deviation Since an area net deviation i the um of it interchange deviation per eq. 4, and Since each interchange deviation i Net Actual Interchange-Net Scheduled Interchange per eq., we can write P i n P n AP SP ij ij ij ij j j j j ji ji ji ji n AP n SP ij AP SP 5 Thi ay that the net deviation for an area i jut the difference between the actual export and the cheduled export for that area. Summary of term: My term W&W term My ymbol W&W ymbol Net actual interchange AP ij Net chedule interchange SP ij Interchange deviation ΔP ij Actual export Total actual net interchange AP i P net int Scheduled export Scheduled or deired value SP i P net int ched of interchange Net export deviation ΔP i ΔP net int i i 7
18 3. Net deviation i unaffected by loop flow. For example, in Fig. 5a, the right ide ha the ame net deviation a the left ide but how a new et of actual flow between area, due to a change in tranfer path impedance. But ΔP i doen t change. A 50 mw 00 mw 0 mw 30 mw A3 80 mw A 00 mw Scheduled Actual A 50 mw 00 mw 5 mw 5 mw A3 75 mw A 00 mw Scheduled Fig. 5a What affect net deviation i varying load & varying gen, a illutrated in Fig. 5b, where the right ide ha the ame cheduled flow a the left ide but how new net deviation for area A, A. A 50 mw 00 mw 0 mw 30 mw A3 80 mw A 00 mw Scheduled Actual A 50 mw 00 mw 5 mw 35 mw A3 75 mw A 00 mw Actual Scheduled Fig. 5b We ee that the A actual export i 60 MW intead of the cheduled export of 50MW, ΔP =60-50=0MW. Liewie, the A3 actual export i 40 MW intead of the cheduled 50 MW, ΔP 3 =40-50=-0MW. The area A actual export i till the ame a the cheduled export of -00 MW, ΔP = =0MW. Actual 8
19 Concluion: Area A ha corrected for a load increae in Area A3. So we need to ignal Area A generator to bac down and Area A3 generator to increae. Overall concluion: To perform load-frequency control in a power ytem coniting of multiple balancing authoritie, we need to meaure two thing: Steady-tate frequency deviation: to determine whether there i a generation/load imbalance in the overall interconnected ytem. f f 60 6 When Δf>0, it mean the generation in the ytem exceed the load and therefore we hould reduce generation in the area. Net deviation: to determine whether the actual export are the ame a the cheduled export. Pi APi SPi 5 When ΔP i >0, it mean that the actual export exceed the cheduled export, and o the generation in area i hould be reduced. 9
20 The meaurement of thee two thing i typically combined in an overall ignal called the area control error, or ACE. From the above, our firt impule may be to immediately write down the ACE for area i a: ACE i Pi f 7 Alternatively, ACE i Pi 8 But we note problem with eq. 8. Firt, we are adding quantitie that have different unit. Anytime you come acro a relation that add or more unit having different unit, beware. The econd problem i that the magnitude of the two term in eq. 8 may differ dramatically. If we are woring in MW and Hz or rad/ec, then we may ee ΔP i in the 00 of MW wherea we will ee Δf or Δω in the hundredth or at mot tenth of a Hz. The implication i that the control ignal, per eq. 8, will greatly favor the export deviation over the frequency deviation. 0
21 Therefore we need to cale one of them. To do o, we define area i frequency bia a B i. It ha unit of MW/Hz, o that ACEi Pi Bi 9 We will loo cloely at ue of thi equation for control. Before we do that, however, we need to loo at the ytem that we are trying to control and obtain model for each ignificant part. 6.0 Generator model A well-nown relation in power ytem analyi i the wing equation. Thi equation i derived in EE 554 and relate acceleration of a ynchronou machine to imbalance between input mechanical power and output electrical power, according to H d e Pm P e 0e dt 0 Or, ince ω=dδ/dt, we can write 0 a H de Pm Pe 0 e dt where
22 δ e i the machine torque electrical angle by which the rotor lead the ynchronouly rotating reference; P m i mechanical input power in per-unit P e i electrical output power in per-unit H i the inertia contant in Mjoule/MW=ec given by 0m I H S b S b i the machine MVA rating; I i moment of inertia of all machine mae in g-m 0 6 ; ω 0m i the ynchronou rotor peed in mechanical rad/ec ω 0e i the ynchronou rotor peed in electrical rad/ec will alway be 377 in North America. If you have the EE554 text Anderon& Fouad, you will find a eq..8 in that text. Here, to agree with eq. 9.6 in W&W, we need to mae three change.
23 .Put frequency in pu: H de P dt 0 e e d 0e H 0e 0e dt m P d H P m P e dt where ω=ω e /ω 0e. m P e P e Ue a different inertia term: Anderon & Fouad define the angular momentum of the machine a M; we denote it here a M AF where M AF I0m 6a From repeated below, left, we can write I0m HSb H I0m S b 6b 0m Thu we ee that HSb M AF 7 0m 3
24 and olving for H, we obtain: M AF H 0m S 8 b Subtituting into 5 repeated below, left: d M AF H P m P 0 m d e P dt m Pe Sb dt 9 Now where A&F ue the angular momentum M AF, W&W ue a per-unitized angular momentum, according to M AF M m WW 0 Sb 0 Comparion to 8 indicate M WW H Therefore, we have d M P m P e dt where it i undertood from now on that M=M WW. W&W indicate on pg. 33 that the unit of M are watt per radian per econd per econd. 4
25 However, it i typically ued in a form of perunit power over per-unit peed per econd, a we have derived it above, and here it ha unit of econd. In fact, W&W themelve mention thi pg 33 and ue it in per-unit form in all of the ret of their wor in thi text. 3.Ue deviation: Expre each variable in a um of an equilibrium value and a deviation, i.e., Pm Pm 0 Pm Pe Pe 0 Pe e0 t t t e0 Subtitution of the above into reult in d t M Pm 0 Pm Pe 0 Pe dt 3 Simplifying, and noting that at equilibrium, P m0 =P e0, we have 5
26 M d t dt P m P e 4 Equation 4 i eq. 9.6 in your text and i what W&W ue to repreent the dynamic of a ynchronou machine. Becaue we want to derive bloc diagram for our control ytem, we will tranform all timedomain expreion into the Laplace domain. M P m P e 5 where we have aumed ωt=0= Load model The load upplied by a power ytem at any given moment conit of many type of element, including electronic load, heating, cooing, and lighting load, and motor load, with the latter two type of load compriing the larger percentage. Of thee two, it i quite typical that heating, cooing, and lighting load have almot no frequency enitivity, i.e., their power conumption remain contant for variation away from nominal frequency. More dicuion about variou load type i in [3]. 6
27 Motor load, on the other hand, are different. To ee thi, we will focu on only the induction motor which tend to comprie the larget percentage of motor load. Conider the tandard per-phae teady-tate model of an induction motor, a given in Fig. 6. Fig. 6 From thi model, the electric power delivered to the motor can be derived a: P R th R 3V ' th R X ' th X ' 6 where R th +jx th and V th are the Thevenin equivalent impedance and voltage, repectively, looing from the rotor circuit the junction between jx S and R in Fig. 6 left, bac into the tator circuit. 7
28 Recall that induction motor lip i given by m = 7 where ω S i the mechanical ynchronou peed et by the networ frequency and ω m i the mechanical peed of the rotor. Subtituting 7 into 6 we obtain P R th R 3V ' m th R ' X th X ' 8 Quetion: Let aume that the voltage V th and the mechanical peed ω m remain almot contant the almot i becaue there i ome variation in ω m which can be oberved by plotting torque v. peed curve ee note from EE 559. What happen to P a ω S decreae? 8
29 Example: Aume contant mechanical peed ω m of 80 rad/ec. What happen to for a 4-pole machine when frequency decreae from 60 Hz to 59.9 Hz? Then indicate qualitatively what happen to power drawn by the motor under thi ame frequency deviation. Solution: At 60 Hz, the ynchronou peed i given and correponding lip are given by ω S =πf/p/=π60/4/=88.5 rad/ec = /88.5=0.045 where p i the number of pole. At 59.9 Hz, it i given by ω S =π59.9/4/=88.8 rad/ec = /88.8= And o reduction in frequency caue a reduction in lip. From 6, we ee that thi R ' will caue the term to increae, which will caue the overall power expreion to decreae. Concluion: Power drop with frequency. m 9
30 EPRI [4] provide an intereting figure which compare frequency enitivity for motor load with non-motor load, hown below in Fig. 7. Fig. 7 Figure 7 how that motor load reduce about % for every % drop in frequency. If we aume that nonmotor load are unaffected by frequency, a reaonable compoite characteritic might be that total load reduce by % for every % drop in frequency, a indicated by the total load characteritic in Fig. 7. To account for load enitivity to frequency deviation, we will define a parameter D according to 30
31 D pu change pu change in from which we may write: pu change in load in load frequency D 9a 9b If our ytem ha a % decreae in power for every % decreae in frequency, then D=. In determining D baed on 9a, the bae frequency hould be the ytem nominal frequency, in North America, 60 Hz. The bae load hould be the ame a the bae MVA, S b, ued to per-unitize power in the wing equation 4, repeated here for convenience. M d t dt P m P e 4 In 4, P e i the change in electric power out of the ynchronou generator. The change in electric power out of the ynchronou generator will be balanced by any change in net electric demand in the networ, which we will denote a P L and 3
32 the change in load due to frequency deviation, according to 9b. Therefore Pe PL D 30 Pleae note that thi D differ from the D ued in tability tudie to repreent windage & friction. Subtitution of 30 into 4 reult in d t M Pm PL D t dt 3 Taing the Laplace tranform of 3 reult in M Pm PL D 3 where again we have aumed ωt=0=0. Solving 3 for ω, we obtain M M D D P P m P L M D Input P We model 33 a in Fig. 8. m m P P L Tranfer Function L 33 3
33 ΔP m + Σ - M+D Δω ΔP L Fig Turbine prime mover model The mechanical power i provided by the primemover, otherwie nown a the turbine. For nuclear, coal, ga, and combined cycle unit, the prime-mover i a team turbine, and the mechanical power i controlled by a team valve. For hydroelectric machine, the prime mover i a hydro-turbine, and the mechanical power i controlled by the water gate. We deire a turbine model which relate mechanical power control team valve or water gate to mechanical power provided by the turbine. 33
34 Since the mechanical power provided by the turbine i the mechanical power provided to the generator, we can denote it a P m. We will denote the mechanical power control a P V. Reference [5, p. 4-6] provide a brief but ueful dicuion about turbine model and indicate that a general turbine model i a hown in Fig. 9. NEXT 6 PAGES PROVIDE BACKGROUND ON TURBINE MODELING. YOU SHOULD READ THIS ON YOUR OWN. IN LECTURE, WE SKIP TO PAGE
35 35 Fig. 9 K Σ T 4 + ΔP V T 5 3 K Σ + + T 6 5 K Σ + + T 7 7 K Σ + + ΔP M
36 Thi turbine model can be applied to a multi-tage team turbine, a ingle-tage team turbine, or a hydro-turbine. The multi-tage team turbine i a common type of turbine that ue reheating to provide additional power from the ame team, and a a reult i mot often called a reheat turbine. The principle behind a reheat turbine i that the energy of the team i dependent upon two of it attribute: preure and temperature. Thi can be oberved in a very imple way by recalling that wor done by exerting a force F over a ditance d i given by W=F d. Dividing F by Area A and multiplying d by A, we get W=F/A da, and recognizing F/A a preure, P, and da a volume V, we ee that W=P V. Now the only other thing we need to now i that volume V increae with temperature, and we ee quicly that the energy exerted by an amount of team flowing over turbine blade increae with preure and temperature. 36
37 A typical -tage reheat turbine i hown in Fig. 0 where we oberve that the reheater provide increaed temperature to utilize the reduced preure team a econd time in the low preure turbine. 400 PSI 000 F HP Turbine LP Turbine GEN STEAM VALVE Exhaut 600 PSI 600 F REHEATER 500 PSI 000 F Fig 0 Referring once again to Fig. 9, the time contant T 4 repreent the firt tage, often called the team chet. If the turbine i non-reheat, then thi i the only time contant needed, and the deired tranfer function i given by Pm PV T4 34 For multitage turbine, reference [5] tate that The time contant T 5, T 6, and T 7 are aociated with time delay of piping ytem for reheater and cro-over mechanim The coefficient K, K 3, K 5, and K 7 repreent fraction of total 37
38 mechanical power output aociated with very high, high, intermediate, and low preure component, repectively. Reference [5] alo provide ome typical data for team turbine ytem, reproduced in Table below. Nonreheat Singlereheat Doublereheat Table T 4 T 5 T 6 T 7 K K 3 K 5 K
39 Finally, reference [5] addree hydro turbine: In the cae of hydro turbine, the ituation depend on the geometry of the ytem, among other factor. The overall tranfer function of a hydro turbine i given a Tw Pm PV 0.5T where T w i nown a the water time contant. The ignificance of the above tranfer function i that it contain a zero in the complex right-half plane. From a tability viewpoint, thi may caue ome problem ince thi i a non-minimum phae ytem. Uing the model of Figure 6.5 Fig. 9 in our note one identifie the following parameter: T 4 =0, T 5 =T w /, T 6 =T 7 =0, K =-, K 3 =3, K 5 =K 7 =0. Typical value of T w range from.5 to 5 ec. The above ytem i called non-minimum phae becaue it ha a right-half-plane zero and therefore, in frequency-repone Bode plot, we will ee a greater phae contribution at frequencie correponding to the RHP zero. w 39
40 We will be able to illutrate the baic attribute of AGC by uing the model for the implet turbine ytem the nonreheat turbine, with tranfer function given by 34. For convenience, we write thi tranfer function here, together with that of the generator with load frequency enitivity given by 33: Pm PL Pm PL G M D 33 P m Input T 4 P Tranfer Function V T P Input Subtituting 34 into 33 reult in T 4 P V P L V M D We ee in 35 tranfer function providing frequency deviation a a function of: change in team valve etting and change in connected load. The bloc diagram for thi appear a in Fig.. Fig. illutrate the action of the primary peed controller, which we will decribe next. 40
41 ΔP V +T 4 T ΔP m + - Σ ΔP L M+D G Δω Fig. Σ - ΔP V +T 4 T ΔP m + - Σ ΔP L M+D G Δω Equation 36-37: P P G P m m T P T Q V L Fig. Q 4
42 9.0 Primary peed control The primary peed controller i alo referred to a the peed governor. It ha three purpoe:.regulate the peed of the machine..aid in matching ytem MW generation with ytem MW load. 3.Provide a mechanim through which econdary peed control can act. Regulation of peed mean we will control ω. To control ω, we mut regulate the input power to the machine, denoted in Fig. by P V. Thi require having feedbac from ω to P V. We denote thi feedbac a Q, a hown in Fig.. Uing the impler notation of T and G, we can ee from Fig. that Pm PL G 36 and Pm T PV T Q 37 Subtitution of 37 into 36 reult in 4
43 T Q P G L 38 Solving for ω T T Q G PL G Q G PL G P G L T Q G 39 Appendix A of thee note provide an analyi of a mechanical-hydraulic peed governor that wa ued for many year and till i in ome older power plant. Newer plant today ue computer-baed digital controller. But the concept are the ame; we utilize eq. A from App A to illutrate the relation in notation of App A, the circumflex above variable indicate the Laplace domain in thee equation. P V 53 xˆ E ˆ 5 4 A Pˆ C A Here, i the ame a P V. We drop the E notation, and we ignore P C which i the etpoint power output for now, o that xˆ E P V ˆ xˆ 43
44 The firt ind of governor ever deigned provided imple integral feedbac. Thi i obtained from 40 if 4 i et to 0 in Appendix A, thi correpond to diconnecting rod CDE at point E in Fig. A4 and A5 ee eq. Aa. Then we obtain 5 3 P V ˆ 4 The contant in 4 are combined to obtain: P K G ˆ V 4 Comparing 4 to the bloc diagram of Fig., we ee that KG Q 43 Subtitution of 43 into 39 reult in P KG L G T G 44 The bloc diagram for 44 i hown in Fig
45 Σ - ΔP V +T 4 T ΔP m + Q Σ - ΔP L M+D G Δω Fig. 4 Σ - ΔP V +T 4 T ΔP m + Σ - ΔP L M+D G Δω Δq Σ + - R Q Fig. 5 45
46 It i of interet to undertand the teady-tate repone of the ytem characterized by 44 to a load change. Let aume that the load change i an intantaneou change. Mathematically, we can model thi uing the tep function ut. If the amount of load change i L, then the appropriate functional notation i P L t Lu t 45 Taing the Laplace tranform, we obtain P L L 46 Subtituting 46 into 44, we obtain K L G G T G Multiplying through by reult in LG K T G G Recall the final-value theorem FVT from Laplace tranform theory, which ay 46
47 lim t f t lim F 0 We can ue the FVT to obtain the teady-tate repone of 48 according to: lim t t lim 0 lim 0 LG 0 K T G G 49 Equation 49 indicate that the teady-tate repone to a tep-change in load i 0. In claical control theory, thi i aid to be a Type ytem, implying that the repone to a tep change give 0 teady-tate error. Therefore, thi governor force ωt to 0 after a long enough time. Very nice! Or i it? To fully appreciate the implication of thi governor deign, we need to recognize that the frequency deviation ignal ωt actually come from comparing the meaured turbine peed ω with a deired reference peed ω ref, o that t ref t 50 47
48 Since there are many generator in a power ytem, each having their own equation 50, we can write t t t t n ref ref refn t t It i phyically not poible to enure ref ref refn Thi governor deign would wor fine if there were only a ingle machine. But with multiple machine, there will alway be ome unit in the ytem that ee a non-zero actuation ignal ω. Thi caue machine to fight againt one another. That i, for the two-machine cae, we will ee that machine will correct cauing machine to ee actuation, machine will correct cauing machine to ee actuation, and o on. 48
49 49 To correct thi problem, we add a proportional feedbac loop around the integrator, a hown in Fig. 5. Note that the tranfer function for the peed governor i now given by R K K R K K q Q G G G G / 5 Factoring out the K G R term from the denominator, we obtain R K R R K R K K Q G G G G 5 Now define T G =/K G R a the governor time contant, we can write 5 a T G R Q 53 We can ue 53 in redrawing Fig. 5 a hown in Fig. 6. We may derive the overall tranfer function via Fig. 6. Alternatively, we may ubtitute 53 into 39, repeated here for convenience. G Q T G P L 39
50 Σ - ΔP V +T 4 T ΔP m + Σ - ΔP L M+D G Δω Δq +T G R Fig. 6 Q 50
51 5 G T T R G P G L 54 Again, we deire to loo at teady-tate frequency error to a tep change in load. Following the ame procedure a before, with L P L 46 the FVT provide that we can write lim / lim lim lim G T T R LG G T T R G L t G G t 55 To better ee the ignificance of 55 we need to ubtitute into it the tranfer function for G and T, which can be een from Fig. 6 to be D M G 4 T T 56 Subtitution into 55 reult in
52 lim t lim t 0 R L M D T T M D Clearing the fraction in the denominator, lim t G T T M D T T M D 4 57 R G 4 L t lim M D 0 R 58 Canceling the M+D term in the numerator, lim t G 4 LR TG T4 T T M D t lim 0 R 59 G Now we can ee that a 0, the expreion become LR L lim t t RD D / R 60 We denote the teady-tate repone to a tep load change of L a ω, 4 LR L RD D / R 6 We will addre how to eliminate thi teadytate error. Before doing that, however, let loo at what happen to the mechanical power delivered to the generator in the teady-tate. 5
53 To do that, we follow the ame procedure a we did when inpecting teady-tate frequency deviation, except now we are invetigating P m,. Thi require that we firt expre P m. Thi can be done eaily baed on Fig. 6, where we oberve that P m T Q 6 Subtituting 39 into 6, we obtain PL G Pm T Q T Q G 6 Subtituting 53 and 56 into 6 reult in P m T R T PL M D 4 G 63 T R T M D Clearing the fraction in the denominator P m T R T P L R 4 G T T M D T T M D 4 G R 4 G Several term will cancel: P R P L 4 G M D T T M D 4 G 64 m 65 Note the two negative ign mae a poitive. 53
54 Again uing P L and applying the FVT, we obtain: lim t P m Therefore, t lim 0 lim 0 lim 0 R R L RD But recall 6: P L 46 m L / T T M D T T M D 4 4 L RD L G G 66 P m, 67 LR RD 6 Dividing both ide of 6 by R, we obtain R L RD Equating 67 and 68 reult in R 68 P m, 69 54
55 Finally, we ue the fact that, at teady-tate, P m, = P e,, and therefore 69 can be expreed a R P e, 70 Or, equivalently, RP e, 7 Figure 7 plot ω a a function of P e,. ω Slope=-R= ω / P e, P e, Fig. 7 Figure 7 diplay the o-called droop characteritic of the peed governor, ince the plot droop moving from left to right. 55
56 It i important to undertand that the droop characteritic Fig. 7 diplay teady-tate frequency and power. You can thin of P L t=lut a the initiating change, then we wait a minute, at which time all tranient have died, and the peed governor will have operated in uch a way o that the frequency will decreae for poitive L by ω, and the generation will have increaed for poitive L by P e,. The parameter R can be undertood via R P e, 7 which how that R i the value of per-unit frequency deviation required to produce a per unit change in electric output power. R i called the regulation coefficient, or droop contant. It i typically et to 5% 0.05 pu in the US frequency and power are given in per-unit and the power per-unit bae i the generator rated MVA. At 5% droop, the frequency deviation correponding to a 00% change in machine output i 3 Hz. Quetion: Would 4% droop be tighter or looer frequency control than 5%? Wetinghoue machine ued to be et to 4% and GE machine to 5%. It wa then recommended to et all machine to 5%, and ome confued engineer were upportive on the bai that the higher value of R wa better for frequency regulation. 56
57 Anwer: It would mean that a machine i required to move more for a given frequency. At 4% droop, the frequency neceary to caue a 00% change in machine output i.4 Hz. So anwer i tighter. Recalling 70, R P e, 70 we ee that if all unit in the interconnection have the ame R, in per-unit on each unit bae MVA, and recalling that in the teady-tate, the entire interconnection ee the ame ω, 70 tell u that all unit will mae the ame per-unit power change when power i given on the generator rated MVA. Thi mean that generator pic-up in proportion to their rating, i.e., larger ized machine pic-up more than maller ized machine. Lovely. Oberve the benefit. Before, with integral control only where Q=K G /, we found teadytate error to be zero, but the machine would continuouly fight againt each other if their ω ref were not exactly equal. 57
58 Now, with proportional-integral control, Q=/R/+T G, we have non-zero teady-tate error, but, machine will not fight one another; intead, they will load hare in proportion to their MVA rating, and in proportion to the final teady-tate frequency error. Thi ituation i illutrated in Fig. 8 below. 58
59 f f 60 hz f 3 Hz P P P MW P,max P,max P MW Fig. 8 Notice in Fig. 8, that when Δf=3Hz, for both unit, j= and j=, f / 60 R Pj / P j,max P 3/ 60 j,max / P j,max
60 Quetion: What can we do about the fact that we have a teady-tate frequency deviation? Anwer: Modify the real power generation et point of the unit. The control point in which to accomplih thi i called the peed changing motor. For a ytem with a ingle generator, thi control change turbine peed and therefore the name and conequently frequency. But for interconnected ytem with a large number of generator uch that frequency i almot contant, thi control mainly change the power output of the machine and i ituated o that the governor can do the wor of actually opening and cloing the valve or gate, a hown in Fig. 9 below, which we redraw a hown in Fig. 0 and then Fig.. W&W call the control the machine load reference et point. I denote it by ΔP ref. The modification to the peed changer motor will caue a hift a hown in Fig.. For contant power, peed or frequency change. For contant frequency, power change. 60
61 Σ - ΔP V +T 4 T ΔP m + Σ - ΔP L M+D G Δω Δq + +T Σ G R - ΔP ref ΔP V +T 4 T Fig. 9 ΔP m + Σ - ΔP L M+D G Δω Δq - +T Σ G R + ΔP ref Fig. 0 6
62 + ΔP ref Σ - +T G ΔP V +T 4 T ΔP m + Σ - ΔP L M+D G Δω R Fig. f P ref5 > P ref4 >P ref3 > P ref > P ref 60 Hz P ref5 P ref4 P ref3 P ref P ref Fig pu P e,.0 pu
63 0.0 Two-area ytem Let now conider applying governor control to a ytem compried of two balancing area BA with each BA having only one generator and o we have temporarily relieved ourelve from having to worry about how to allocate the demand among the variou generator. Fig 3 below illutrate. BA BA P X Fig. 3 The power flowing from BA to BA may be expreed a V V X P in 7 Aume that V =V =.0 and that θ -θ i mall and in radian. Then 7 become X P 7 63
64 Now aume that we have a mall perturbation perhap a mall P L. Then X P P 73 which can be rewritten a X P P 74 where we ee that P t t t X 75 In 75, we have made the dependency on time explicit. Taing the Laplace tranform of 75, we obtain: But P X 76 In Laplace, 77a become i t i t dt 77a i i 77b Subtituting 77b into 76 reult in P X 78 64
65 Equation 78 aume that ω i i in rad/ec. However, we deire it to be in per-unit, which can be achieved by 79: e0 P X 79 Notation for ω i in 78 and 79 i the ame, but in 78, ω i i in rad/ec wherea in 79, ω i i in pu, with thi difference in the two equation being compenated by the multiplication of bae frequency ω e0 in 79. Now we define the tie-line tiffne coefficient T X e0 80 Thi tie-line tiffne coefficient i proportional to what i often referred to a the ynchronizing power coefficient. For a ingle-generator connected through a tie-line having reactance X to an infinite bu, the power tranfer i given by VV P e X in where V and V are the voltage magnitude of the two bue and δ i the angular difference 65
66 between them. In thi cae, the ynchronizing power coefficient i defined a P e V V X co The ynchronizing power coefficient, or the tiffne coefficient a defined in 80, increae a the line reactance decreae. The larger the T, the greater the change in power for a given change in bu phae angle. Equation 79 become, then, T P 8 The text pp ue P tie intead of P. To clarify, we have P P P tie 8 Oberve that + P caue increae generation from BA it appear to BA a a load increae and hould therefore have the ame ign a P L. We draw the bloc diagram for the -area ytem uing two of Fig. with 8 and 8, a hown in Fig. 4, which i the ame except for ome nomenclature a Fig. 9.6 in W&W. 66
67 R + ΔP ref, + ΔP ref, - Σ Σ - +T G, +T G, ΔP V ΔP V +T 4, T +T 4, T ΔP m + ΔP L ΔP L ΔP m Σ - ΔP tie ΔP tie + Σ M +D T G M +D G Δω Δω + Σ - R Fig. 4 67
68 In developing data for the -area ytem, all quantitie mut be normalized to the ame power bae. Thi pertain to M, D, R, and all power quantitie. We would lie to find teady-tate value of frequency ω and mechanical power P m and P m. To do thi, we begin by recalling the expreion for ω for the ingle balancing area model, given by 54: where, G PL G T G R T M Subtitution yield Simplifying, R R D P L G T M T T T M D G D PL R TG T4 T T M D G Remember, 84 i for a ingle balancing area. Quetion: If you are BA, how doe being connected to BA differ from operating a a ingle BA? 68
69 Anwer: The anwer can be een by comparing the external input to the demand ummer of Fig. 4, which model interconnected balancing area, and that of Fig., which model jut one. ΔP m + Σ ΔP m + Σ ΔP L - - ΔP tie - ΔP L From Fig. ΔP L ΔP m + - Σ ΔP tie + From Fig. 4 Wherea Fig. ee only it own load change, P L, a an external input, Fig. 4 ee,. in the cae of BA, the BA load change plu the tie-line flow change, P L + P tie, i.e., P L T PL Ptie PL 85a 69
70 . and in the cae of BA, the BA load change le the tie-line flow change, P L - P tie, i.e., PL PL Ptie PL 85b So what we can do i to jut mae the ubtitution of 85a into the ω expreion of 84, i.e., replace ΔP L in 84 with ΔP L + ΔP tie from the RHS of 85a. Alternatively, we can mae the ubtitution of 85b into the ω expreion of 84, i.e., replace ΔP L in 84 with ΔP L - ΔP tie from the RHS of 85b. In the firt cae, we obtain ω, and in the econd, we obtain ω. It doe not matter which one we ue becaue we are intereted in the teady-tate frequency, and we now within an interconnection, the teady-tate frequency i the ame everywhere, o the expreion will be identical. Although it get a little algebraically mey, maing one of the above ubtitution, with P L =L /, and ue of the FVT, we obtain: T 70
71 Again, for the -area ytem, all quantitie mut be normalized to the ame power bae. So in 86, R, R, D, and D mut be on the ame power bae. Let denote them with a ubcript of By in what follow. There are two demand ummer. The one dicued here i the one in the right-center of the Fig. 4 diagram, where ΔP L i input. R L D R D 86 You can alo algebraically find P m, and P m,, or you can reaon a follow:. We found before that, R for a one balancing area ytem.. A we already oberved, the only difference between the ingle area and the two area model, from the point of view of either area, i what the demand ummer ee. 3. But oberving the model of Fig. 4, we ee that P m depend on the input to the demand ummer only through ω; a long a we now ω, we do not need any additional information about the input to the demand ummer to obtain P m. Therefore, we have Pm, Pm, 87 R, By P m R, By Quetion: How doe the generation get ditributed? 7
72 Define R,B =R,B =0.05 a droop contant on the machine bae. But 87 are derived from a ytem of governor, neceitating that P m, P m, R, and R be given on the ame MVA bae the ytem MVA bae, which we refer to a S By a oppoed to the machine MVA bae, S B. Recalling RP m,, we can write that the per-unit frequency deviation i: R MW, By P S MW m By R, B P S MW m B 88 where Pm i in MW. Solving 88 for R,By, we obtain R R, By, B Similarly, we can derive R R, By, B Subtitute 89a and 89b into 87 reult in S S S By S B By B 89a 89b 7
73 P P m, SB SBy R, BS By R, B SB m, SB SBy R, BSBy R, B SB 90a 90b Equation 90a and 90b expre the teadytate power deviation in per-unit on the ytem bae, S By. To expre them in MW, we have P P S MW m, B R, B S MW m, B R, B 9a 9b If we require that R,B =R,B be equal and in North America they are 0.05, then 9a and 9b indicate that the governor action repond in uch a way o that each balancing area compenate for load change in proportion to it ize. Thi wa a concluion we gueed at in the analyi of a ingle area ee equation 70 but here we have confirmed it uing rigorou analyi for a two area cae. 73
74 A a lat comment regarding the two-area model, let tae a loo at the electrical power out of the machine. In what follow, all quantitie are on a common power bae S By. In the ingle area cae, you will recall that the teady-tate deviation in electrical power out of the machine i equal to the change in load P L plu the change in load reulting from the teady-tate frequency deviation per 30, i.e., Pe PL D 30 The ituation for area will be exactly the ame, except now we alo have to pay attention to change in tie-line flow, i.e., Pe PL D Ptie 9 where P tie = P =- P. If the only load change i in BA, i.e., P L =0, then Pe D P tie 93 But recall from 87 P e, R, By P e, R, By 94 Subtitution of the P e of 94 into 93 give 74
75 P e, D P tie R 95 Solving for P tie reult in P tie D R Subtitution of 86 into 96 reult in P tie L D R D D R R.0 Secondary control Quetion: What ort of additional control do we need for our two-area ytem? For a tep load change in area, we deire:. P m = P L Each BA compenate. P m =0 for it own load change. 3. ω =0 4. P tie =0 How to develop uch a control? 75
76 There are three baic way:. Derive teady-tate relation for ω and P tie and a: What do we need to do to mae their um = 0? Thi i what W&W do, ee page Derive expreion for ω, P tie, P m, and P m given an unnown control input u, and then apply condition -4 above. Thi wor, but it i algebraically mey. 3. Reaon via nowledge of proce control. Thi i what we will do. The reaoning i provided in what follow. Integral control action: Conider the following ytem that i conceptually imilar to our own two-area loadfrequency model. r We deire to enure that bt and ct are driven to 0 in the teady-tate t= following a tep change in pt, i.e., p=/. In the above ytem, we do not achieve thi a hown below aume r=0. B b B p C B c C b b lim b t lim b lim c A t lim c t t a + 0 lim c We oberve that neither term goe to zero. - Σ p=/ B b B C lim C B c 76
77 77 The only way we will achieve b =0 i if we have a zero in B, and the only way we will achieve c =0 i if we have a zero in B or C or both. Aumption : We do not have a zero in B or C. Aumption : We do not have a zero in A. Let add a controller in front of A and feedbac the um of c and b through it a follow: Again, aume that r=0 and p=/. We may derive the expreion for b a follow: / C D A B B b B C D A B b B C D A B b B C b b D A B b B a B a B p a B b C b b D A c b D A a A Σ + - p=/ B C c b a Σ r Σ D
78 78 And becaue c=cb, / C D A B C B c We can now loo at the teady-tate error of thee two term: lim lim lim lim lim lim C D A B C B c t c c C D A B B b t b b t t Now let D=/, an integrator. In that cae, 0 lim lim lim lim C A B B C A B B b t b b t Liewie, 0 lim lim lim lim C A B C B C A B C B c t c c t
79 What i the point? We may zero the teady-tate error of a ignal, when ytem input i a tep repone, by paing the ignal through an integral-controller via a negative feedbac loop. That i, we deire to mae Δω and ΔP tie, zero jut lie we made bt, ct zero in the above exercie. So, let um them & pa them through an integral controller via a negative feedbac loop. Fig. 9.,W&W, illutrate. ΔP L ΔP L 79
80 80 Notice D=K/; frequency bia factor B & B ; and 3 the ignal ACE =-B ω- P tie, ACE =-B ω+ P tie where R D B R D B The ACE and ACE ignal become poitive to increae generation when ω and P tie are negative..0 State equation State equation may be written for the ytem illutrated in Fig. 9. of W&W. Thee equation enable one to imulate the ytem uing Simulin. tie ref L tie m m T V T m ref G G V G V P K t KB t P t P M t P M t M D t P M t t P T t P T t P t P T t R T t P T t P
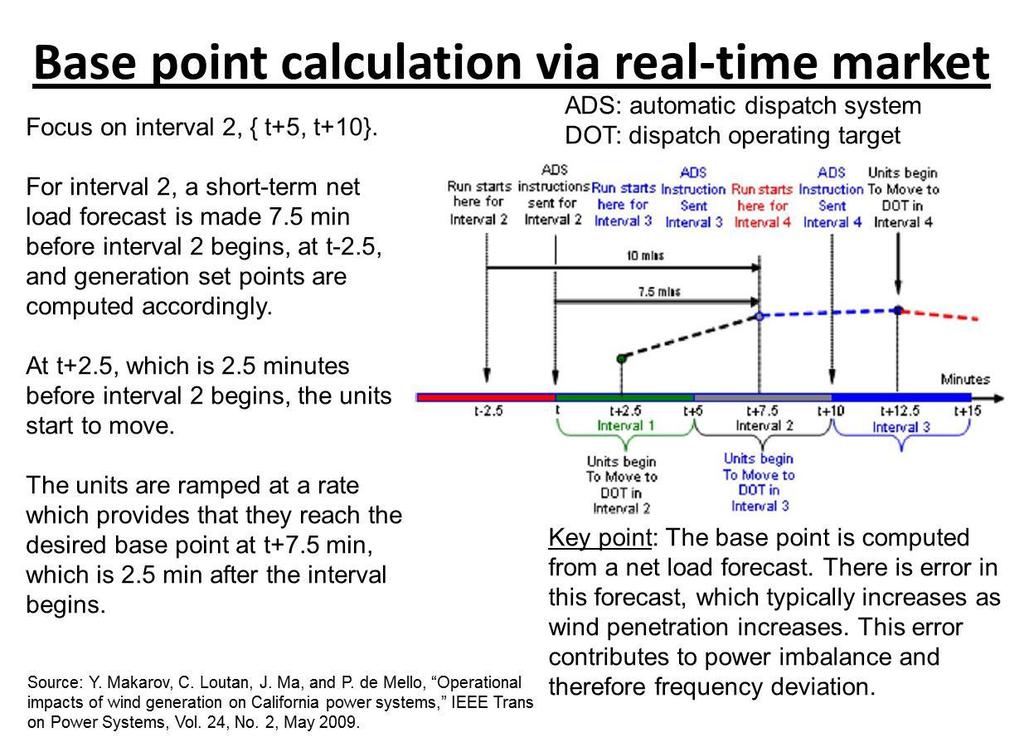
81 8 tie ref L tie m m T V T m ref G G V G V P K t KB t P t P M t P M t M D t P M t t P T t P T t P t P T t R T t P T t P t T t T t P tie 3.0 Bae point calculation A lat comment i that the ACE, being a meaure of how much the total ytem generation need to change, i allocated to the variou unit that comprie the balancing area via participation factor. Thi i illutrated in Fig. 9.5 of W&W. The participation factor are obtained by linearizing the economic maret dipatch about the lat bae point olution ee Wood & Wollenberg, ection 3.8. Bae point calculation i performed by the realtime maret every 5 min, a indicated in the lide at the top of the next page.
82 8
83 4.0 Control performance tandard Control Performance Standard CPS and CPS are two performance metric aociated with load frequency control. Thee meaure depend on area control error ACE, given for control area i a ACE i Pi Bf Pi APi SPi 3 where AP i and SP i are actual and cheduled export, repectively. ACE i i computed on a continuou bai. With thi definition, we can define CPS and CPS a CPS: It meaure ACE variability, a meaure of hortterm error between load and generation [ 6 ]. It i an average of a function combining ACE and interconnection frequency error from chedule [ 7 ]. It meaure control performance by comparing how well a control area ACE perform in conjunction with the frequency error of the interconnection. It i given by CF where CPS CF 00% 4a ControlParameter Month 4b ControlPar ameter ACE 0B min ute F min ute 4c 83

![It i illutrated in Fig. 9 [ 8 ]. ε -ε 60-ε 60+ε Fig.](/docs-images/72/66370027/images/84-1.jpg "9 [8] The control parameter, a MW-Hz, indicate the extent to which the control area i contributing to or hindering")
84 CF i the compliance factor, the ratio of the month average control parameter divided by the quare of the frequency target ε. ε i the maximum acceptable teady-tate frequency deviation it i 0.08 Hz=8 mhz in the eatern interconnection. It i illutrated in Fig. 9 [ 8 ]. ε -ε 60-ε 60+ε Fig. 9 [8] The control parameter, a MW-Hz, indicate the extent to which the control area i contributing to or hindering correction of the interconnection frequency error, a illutrated in Fig. 0 [8]. Fig. 0 [8] 84
85 If ACE i poitive, the control area will be increaing it generation, and if ACE i negative, the control area will be decreaing it generation. If F i poitive, then the overall interconnection need to decreae it generation, and if F i negative, then the overall interconnection need to increae it generation. Therefore if the ign of the product ACE F i poitive, then the control area i hindering the needed frequency correction, and if the ign of the product ACE F i negative, then the control area i contributing to the needed frequency correction. o A CPS core of 00% i perfect actual meaured frequency equal cheduled frequency over any - minute period o The minimum paing long-term -month rolling average core for CPS i 00% CPS: The ten-minute average ACE. In ummary, from [ 9 ], CPS meaure the relationhip between the control area ACE and it interconnection frequency on a one-minute average bai. CPS value are recorded every minute, but the metric i evaluated and reported annually. NERC et minimum CPS requirement that each control area mut exceed each year. CPS i a monthly performance tandard that et control-area-pecific limit on the maximum average ACE for every 0-minute period. The underlying iue here i that control area operator are penalized if they do 85
86 not maintain CPS. The ability to maintain thee tandard i decreaed a inertia decreae. 86
87 Appendix A Thee note are adapted from treatment in [0]. Speed governing equipment for team and hydro turbine are conceptually imilar. Mot peed governing ytem are one of two type; mechanical-hydraulic or Electro-hydraulic. Electro-hydraulic governing equipment ue electrical ening intead of mechanical, and variou other function are implemented uing electronic circuitry. Some Electro-hydraulic governing ytem alo incorporate digital computer oftware control to achieve neceary tranient and teady tate control requirement. The mechanical-hydraulic deign illutrated in Fig. A4 i ued with older generator. We review thi older deign here becaue it provide good intuitive undertanding of the primary peed loop operation. Baic operation of thi feedbac control for turbine operating under-peed correponding 87
88 to the cae of loing generation or adding load i indicated by movement of each component a hown by the vertical arrow. Fig. A4 A ω m decreae, the bevel gear decreae their rotational peed, and the rotating flyweight pull together due to decreaed centrifugal force. Thi caue point B and therefore point C to raie. Auming, initially, that point E i fixed, point D alo raie cauing high preure oil to flow into the cylinder through the upper port and releae of the oil through the lower port. The oil caue the main piton to lower, which open the team valve or water gate in the 88
89 cae of a hydro machine, increaing the energy upply to the machine in order to increae the peed. To avoid over-correction, Rod CDE i connected at point E o that when the main piton lower, and thu point E lower, Rod CDE alo lower. Thi caue a reveral of the original action of opening the team valve. The amount of correction obtained in thi action can be adjuted. Thi action provide for an intentional non-zero teady-tate frequency error. There i really only one input to the diagram of Fig. A4, and that i the peed of the governor, which determine how the point B move from it original poition and therefore alo determine the change in the team-valve opening. However, we alo need to be able to et the input of the team-valve opening directly, o that we can change the MW output of the 89
90 generator in order to achieve economic operation. Thi i achieved by enabling direct control of the poition of point C via a ervomotor, a illutrated in Fig. A5. For example, a point A move down, auming contant frequency, point B remain fixed and therefore point C move up. Thi caue point D to raie, opening the valve to increae the team flow. Fig. A5 A model for mall change We deire an analytic model that enable u to tudy the operation of the Fig. A5 controller 90
91 when it undergoe mall change away from a current tate. We utilize the variable hown in Fig. A5, which include ΔP C, Δx A, Δx B, Δx C, Δx D, Δx E. We provide tatement indicating the conceptual bai and then the analytical relation. In each cae, we expre an output or dependent variable a a function of input or independent variable of a certain portion of the controller..bai: Point A, B, C are on the ame rod. Point C i the output. When A i fixed, C move in ame direction a B. When B i fixed, C move in oppoite direction a A. Relation: xc Bx B Ax A A7.Bai: Change in point B depend on the change in frequency Δω. Relation: B xb A8 3.Bai: Change in point A depend on the change in et point ΔP C. Relation: AxA PC A9 Subtitution of A8 & A9 into A7 reult in xc P C A0a 9
What lies between Δx E, which represents the steam valve, and ΔP M, which is the mechanical power into the synchronous machine?
 A 2.0 Introduction In the lat et of note, we developed a model of the peed governing mechanim, which i given below: xˆ K ( Pˆ ˆ) E () In thee note, we want to extend thi model o that it relate the actual
A 2.0 Introduction In the lat et of note, we developed a model of the peed governing mechanim, which i given below: xˆ K ( Pˆ ˆ) E () In thee note, we want to extend thi model o that it relate the actual
FUNDAMENTALS OF POWER SYSTEMS
 1 FUNDAMENTALS OF POWER SYSTEMS 1 Chapter FUNDAMENTALS OF POWER SYSTEMS INTRODUCTION The three baic element of electrical engineering are reitor, inductor and capacitor. The reitor conume ohmic or diipative
1 FUNDAMENTALS OF POWER SYSTEMS 1 Chapter FUNDAMENTALS OF POWER SYSTEMS INTRODUCTION The three baic element of electrical engineering are reitor, inductor and capacitor. The reitor conume ohmic or diipative
Question 1 Equivalent Circuits
 MAE 40 inear ircuit Fall 2007 Final Intruction ) Thi exam i open book You may ue whatever written material you chooe, including your cla note and textbook You may ue a hand calculator with no communication
MAE 40 inear ircuit Fall 2007 Final Intruction ) Thi exam i open book You may ue whatever written material you chooe, including your cla note and textbook You may ue a hand calculator with no communication
Homework #7 Solution. Solutions: ΔP L Δω. Fig. 1
 Homework #7 Solution Aignment:. through.6 Bergen & Vittal. M Solution: Modified Equation.6 becaue gen. peed not fed back * M (.0rad / MW ec)(00mw) rad /ec peed ( ) (60) 9.55r. p. m. 3600 ( 9.55) 3590.45r.
Homework #7 Solution Aignment:. through.6 Bergen & Vittal. M Solution: Modified Equation.6 becaue gen. peed not fed back * M (.0rad / MW ec)(00mw) rad /ec peed ( ) (60) 9.55r. p. m. 3600 ( 9.55) 3590.45r.
Section Induction motor drives
 Section 5.1 - nduction motor drive Electric Drive Sytem 5.1.1. ntroduction he AC induction motor i by far the mot widely ued motor in the indutry. raditionally, it ha been ued in contant and lowly variable-peed
Section 5.1 - nduction motor drive Electric Drive Sytem 5.1.1. ntroduction he AC induction motor i by far the mot widely ued motor in the indutry. raditionally, it ha been ued in contant and lowly variable-peed
Gain and Phase Margins Based Delay Dependent Stability Analysis of Two- Area LFC System with Communication Delays
 Gain and Phae Margin Baed Delay Dependent Stability Analyi of Two- Area LFC Sytem with Communication Delay Şahin Sönmez and Saffet Ayaun Department of Electrical Engineering, Niğde Ömer Halidemir Univerity,
Gain and Phae Margin Baed Delay Dependent Stability Analyi of Two- Area LFC Sytem with Communication Delay Şahin Sönmez and Saffet Ayaun Department of Electrical Engineering, Niğde Ömer Halidemir Univerity,
ME 375 FINAL EXAM Wednesday, May 6, 2009
 ME 375 FINAL EXAM Wedneday, May 6, 9 Diviion Meckl :3 / Adam :3 (circle one) Name_ Intruction () Thi i a cloed book examination, but you are allowed three ingle-ided 8.5 crib heet. A calculator i NOT allowed.
ME 375 FINAL EXAM Wedneday, May 6, 9 Diviion Meckl :3 / Adam :3 (circle one) Name_ Intruction () Thi i a cloed book examination, but you are allowed three ingle-ided 8.5 crib heet. A calculator i NOT allowed.
Massachusetts Institute of Technology Dynamics and Control II
 I E Maachuett Intitute of Technology Department of Mechanical Engineering 2.004 Dynamic and Control II Laboratory Seion 5: Elimination of Steady-State Error Uing Integral Control Action 1 Laboratory Objective:
I E Maachuett Intitute of Technology Department of Mechanical Engineering 2.004 Dynamic and Control II Laboratory Seion 5: Elimination of Steady-State Error Uing Integral Control Action 1 Laboratory Objective:
BASIC INDUCTION MOTOR CONCEPTS
 INDUCTION MOTOS An induction motor ha the ame phyical tator a a ynchronou machine, with a different rotor contruction. There are two different type of induction motor rotor which can be placed inide the
INDUCTION MOTOS An induction motor ha the ame phyical tator a a ynchronou machine, with a different rotor contruction. There are two different type of induction motor rotor which can be placed inide the
SERIES COMPENSATION: VOLTAGE COMPENSATION USING DVR (Lectures 41-48)
") Chapter 5 SERIES COMPENSATION: VOLTAGE COMPENSATION USING DVR (Lecture 41-48) 5.1 Introduction Power ytem hould enure good quality of electric power upply, which mean voltage and current waveform hould
Chapter 5 SERIES COMPENSATION: VOLTAGE COMPENSATION USING DVR (Lecture 41-48) 5.1 Introduction Power ytem hould enure good quality of electric power upply, which mean voltage and current waveform hould
ECE 3510 Root Locus Design Examples. PI To eliminate steady-state error (for constant inputs) & perfect rejection of constant disturbances
 & perfect rejection of constant disturbances") ECE 350 Root Locu Deign Example Recall the imple crude ervo from lab G( ) 0 6.64 53.78 σ = = 3 23.473 PI To eliminate teady-tate error (for contant input) & perfect reection of contant diturbance Note:
ECE 350 Root Locu Deign Example Recall the imple crude ervo from lab G( ) 0 6.64 53.78 σ = = 3 23.473 PI To eliminate teady-tate error (for contant input) & perfect reection of contant diturbance Note:
ME 375 FINAL EXAM SOLUTIONS Friday December 17, 2004
 ME 375 FINAL EXAM SOLUTIONS Friday December 7, 004 Diviion Adam 0:30 / Yao :30 (circle one) Name Intruction () Thi i a cloed book eamination, but you are allowed three 8.5 crib heet. () You have two hour
ME 375 FINAL EXAM SOLUTIONS Friday December 7, 004 Diviion Adam 0:30 / Yao :30 (circle one) Name Intruction () Thi i a cloed book eamination, but you are allowed three 8.5 crib heet. () You have two hour
Social Studies 201 Notes for November 14, 2003
 1 Social Studie 201 Note for November 14, 2003 Etimation of a mean, mall ample ize Section 8.4, p. 501. When a reearcher ha only a mall ample ize available, the central limit theorem doe not apply to the
1 Social Studie 201 Note for November 14, 2003 Etimation of a mean, mall ample ize Section 8.4, p. 501. When a reearcher ha only a mall ample ize available, the central limit theorem doe not apply to the
Bogoliubov Transformation in Classical Mechanics
 Bogoliubov Tranformation in Claical Mechanic Canonical Tranformation Suppoe we have a et of complex canonical variable, {a j }, and would like to conider another et of variable, {b }, b b ({a j }). How
Bogoliubov Tranformation in Claical Mechanic Canonical Tranformation Suppoe we have a et of complex canonical variable, {a j }, and would like to conider another et of variable, {b }, b b ({a j }). How
Lecture 10 Filtering: Applied Concepts
 Lecture Filtering: Applied Concept In the previou two lecture, you have learned about finite-impule-repone (FIR) and infinite-impule-repone (IIR) filter. In thee lecture, we introduced the concept of filtering
Lecture Filtering: Applied Concept In the previou two lecture, you have learned about finite-impule-repone (FIR) and infinite-impule-repone (IIR) filter. In thee lecture, we introduced the concept of filtering
LOAD FREQUENCY CONTROL OF MULTI AREA INTERCONNECTED SYSTEM WITH TCPS AND DIVERSE SOURCES OF POWER GENERATION
 G.J. E.D.T.,Vol.(6:93 (NovemberDecember, 03 ISSN: 39 793 LOAD FREQUENCY CONTROL OF MULTI AREA INTERCONNECTED SYSTEM WITH TCPS AND DIVERSE SOURCES OF POWER GENERATION C.Srinivaa Rao Dept. of EEE, G.Pullaiah
G.J. E.D.T.,Vol.(6:93 (NovemberDecember, 03 ISSN: 39 793 LOAD FREQUENCY CONTROL OF MULTI AREA INTERCONNECTED SYSTEM WITH TCPS AND DIVERSE SOURCES OF POWER GENERATION C.Srinivaa Rao Dept. of EEE, G.Pullaiah
Social Studies 201 Notes for March 18, 2005
 1 Social Studie 201 Note for March 18, 2005 Etimation of a mean, mall ample ize Section 8.4, p. 501. When a reearcher ha only a mall ample ize available, the central limit theorem doe not apply to the
1 Social Studie 201 Note for March 18, 2005 Etimation of a mean, mall ample ize Section 8.4, p. 501. When a reearcher ha only a mall ample ize available, the central limit theorem doe not apply to the
Introduction to Laplace Transform Techniques in Circuit Analysis
 Unit 6 Introduction to Laplace Tranform Technique in Circuit Analyi In thi unit we conider the application of Laplace Tranform to circuit analyi. A relevant dicuion of the one-ided Laplace tranform i found
Unit 6 Introduction to Laplace Tranform Technique in Circuit Analyi In thi unit we conider the application of Laplace Tranform to circuit analyi. A relevant dicuion of the one-ided Laplace tranform i found
Chapter 10. Closed-Loop Control Systems
 hapter 0 loed-loop ontrol Sytem ontrol Diagram of a Typical ontrol Loop Actuator Sytem F F 2 T T 2 ontroller T Senor Sytem T TT omponent and Signal of a Typical ontrol Loop F F 2 T Air 3-5 pig 4-20 ma
hapter 0 loed-loop ontrol Sytem ontrol Diagram of a Typical ontrol Loop Actuator Sytem F F 2 T T 2 ontroller T Senor Sytem T TT omponent and Signal of a Typical ontrol Loop F F 2 T Air 3-5 pig 4-20 ma
EE 4443/5329. LAB 3: Control of Industrial Systems. Simulation and Hardware Control (PID Design) The Inverted Pendulum. (ECP Systems-Model: 505)
 The Inverted Pendulum. (ECP Systems-Model: 505)") EE 4443/5329 LAB 3: Control of Indutrial Sytem Simulation and Hardware Control (PID Deign) The Inverted Pendulum (ECP Sytem-Model: 505) Compiled by: Nitin Swamy Email: nwamy@lakehore.uta.edu Email: okuljaca@lakehore.uta.edu
EE 4443/5329 LAB 3: Control of Indutrial Sytem Simulation and Hardware Control (PID Deign) The Inverted Pendulum (ECP Sytem-Model: 505) Compiled by: Nitin Swamy Email: nwamy@lakehore.uta.edu Email: okuljaca@lakehore.uta.edu
ME 375 EXAM #1 Tuesday February 21, 2006
 ME 375 EXAM #1 Tueday February 1, 006 Diviion Adam 11:30 / Savran :30 (circle one) Name Intruction (1) Thi i a cloed book examination, but you are allowed one 8.5x11 crib heet. () You have one hour to
ME 375 EXAM #1 Tueday February 1, 006 Diviion Adam 11:30 / Savran :30 (circle one) Name Intruction (1) Thi i a cloed book examination, but you are allowed one 8.5x11 crib heet. () You have one hour to
Digital Control System
 Digital Control Sytem - A D D A Micro ADC DAC Proceor Correction Element Proce Clock Meaurement A: Analog D: Digital Continuou Controller and Digital Control Rt - c Plant yt Continuou Controller Digital
Digital Control Sytem - A D D A Micro ADC DAC Proceor Correction Element Proce Clock Meaurement A: Analog D: Digital Continuou Controller and Digital Control Rt - c Plant yt Continuou Controller Digital
into a discrete time function. Recall that the table of Laplace/z-transforms is constructed by (i) selecting to get
 selecting to get") Lecture 25 Introduction to Some Matlab c2d Code in Relation to Sampled Sytem here are many way to convert a continuou time function, { h( t) ; t [0, )} into a dicrete time function { h ( k) ; k {0,,, }}
Lecture 25 Introduction to Some Matlab c2d Code in Relation to Sampled Sytem here are many way to convert a continuou time function, { h( t) ; t [0, )} into a dicrete time function { h ( k) ; k {0,,, }}
The Influence of the Load Condition upon the Radial Distribution of Electromagnetic Vibration and Noise in a Three-Phase Squirrel-Cage Induction Motor
 The Influence of the Load Condition upon the Radial Ditribution of Electromagnetic Vibration and Noie in a Three-Phae Squirrel-Cage Induction Motor Yuta Sato 1, Iao Hirotuka 1, Kazuo Tuboi 1, Maanori Nakamura
The Influence of the Load Condition upon the Radial Ditribution of Electromagnetic Vibration and Noie in a Three-Phae Squirrel-Cage Induction Motor Yuta Sato 1, Iao Hirotuka 1, Kazuo Tuboi 1, Maanori Nakamura
S_LOOP: SINGLE-LOOP FEEDBACK CONTROL SYSTEM ANALYSIS
 S_LOOP: SINGLE-LOOP FEEDBACK CONTROL SYSTEM ANALYSIS by Michelle Gretzinger, Daniel Zyngier and Thoma Marlin INTRODUCTION One of the challenge to the engineer learning proce control i relating theoretical
S_LOOP: SINGLE-LOOP FEEDBACK CONTROL SYSTEM ANALYSIS by Michelle Gretzinger, Daniel Zyngier and Thoma Marlin INTRODUCTION One of the challenge to the engineer learning proce control i relating theoretical
POWER SYSTEM SMALL SIGNAL STABILITY ANALYSIS BASED ON TEST SIGNAL
 POWE YEM MALL INAL ABILIY ANALYI BAE ON E INAL Zheng Xu, Wei hao, Changchun Zhou Zheang Univerity, Hangzhou, 37 PChina Email: hvdc@ceezueducn Abtract - In thi paper, a method baed on ome tet ignal (et
POWE YEM MALL INAL ABILIY ANALYI BAE ON E INAL Zheng Xu, Wei hao, Changchun Zhou Zheang Univerity, Hangzhou, 37 PChina Email: hvdc@ceezueducn Abtract - In thi paper, a method baed on ome tet ignal (et
Nonlinear Single-Particle Dynamics in High Energy Accelerators
 Nonlinear Single-Particle Dynamic in High Energy Accelerator Part 6: Canonical Perturbation Theory Nonlinear Single-Particle Dynamic in High Energy Accelerator Thi coure conit of eight lecture: 1. Introduction
Nonlinear Single-Particle Dynamic in High Energy Accelerator Part 6: Canonical Perturbation Theory Nonlinear Single-Particle Dynamic in High Energy Accelerator Thi coure conit of eight lecture: 1. Introduction
Homework 12 Solution - AME30315, Spring 2013
 Homework 2 Solution - AME335, Spring 23 Problem :[2 pt] The Aerotech AGS 5 i a linear motor driven XY poitioning ytem (ee attached product heet). A friend of mine, through careful experimentation, identified
Homework 2 Solution - AME335, Spring 23 Problem :[2 pt] The Aerotech AGS 5 i a linear motor driven XY poitioning ytem (ee attached product heet). A friend of mine, through careful experimentation, identified
SIMON FRASER UNIVERSITY School of Engineering Science ENSC 320 Electric Circuits II. Solutions to Assignment 3 February 2005.
 SIMON FRASER UNIVERSITY School of Engineering Science ENSC 320 Electric Circuit II Solution to Aignment 3 February 2005. Initial Condition Source 0 V battery witch flip at t 0 find i 3 (t) Component value:
SIMON FRASER UNIVERSITY School of Engineering Science ENSC 320 Electric Circuit II Solution to Aignment 3 February 2005. Initial Condition Source 0 V battery witch flip at t 0 find i 3 (t) Component value:
7.2 INVERSE TRANSFORMS AND TRANSFORMS OF DERIVATIVES 281
 72 INVERSE TRANSFORMS AND TRANSFORMS OF DERIVATIVES 28 and i 2 Show how Euler formula (page 33) can then be ued to deduce the reult a ( a) 2 b 2 {e at co bt} {e at in bt} b ( a) 2 b 2 5 Under what condition
72 INVERSE TRANSFORMS AND TRANSFORMS OF DERIVATIVES 28 and i 2 Show how Euler formula (page 33) can then be ued to deduce the reult a ( a) 2 b 2 {e at co bt} {e at in bt} b ( a) 2 b 2 5 Under what condition
Design By Emulation (Indirect Method)
") Deign By Emulation (Indirect Method he baic trategy here i, that Given a continuou tranfer function, it i required to find the bet dicrete equivalent uch that the ignal produced by paing an input ignal
Deign By Emulation (Indirect Method he baic trategy here i, that Given a continuou tranfer function, it i required to find the bet dicrete equivalent uch that the ignal produced by paing an input ignal
Given the following circuit with unknown initial capacitor voltage v(0): X(s) Immediately, we know that the transfer function H(s) is
: X(s) Immediately, we know that the transfer function H(s) is") EE 4G Note: Chapter 6 Intructor: Cheung More about ZSR and ZIR. Finding unknown initial condition: Given the following circuit with unknown initial capacitor voltage v0: F v0/ / Input xt 0Ω Output yt -
EE 4G Note: Chapter 6 Intructor: Cheung More about ZSR and ZIR. Finding unknown initial condition: Given the following circuit with unknown initial capacitor voltage v0: F v0/ / Input xt 0Ω Output yt -
No-load And Blocked Rotor Test On An Induction Machine
 No-load And Blocked Rotor Tet On An Induction Machine Aim To etimate magnetization and leakage impedance parameter of induction machine uing no-load and blocked rotor tet Theory An induction machine in
No-load And Blocked Rotor Tet On An Induction Machine Aim To etimate magnetization and leakage impedance parameter of induction machine uing no-load and blocked rotor tet Theory An induction machine in
V = 4 3 πr3. d dt V = d ( 4 dv dt. = 4 3 π d dt r3 dv π 3r2 dv. dt = 4πr 2 dr
 0.1 Related Rate In many phyical ituation we have a relationhip between multiple quantitie, and we know the rate at which one of the quantitie i changing. Oftentime we can ue thi relationhip a a convenient
0.1 Related Rate In many phyical ituation we have a relationhip between multiple quantitie, and we know the rate at which one of the quantitie i changing. Oftentime we can ue thi relationhip a a convenient
Representation of a Group of Three-phase Induction Motors Using Per Unit Aggregation Model A.Kunakorn and T.Banyatnopparat
 epreentation of a Group of Three-phae Induction Motor Uing Per Unit Aggregation Model A.Kunakorn and T.Banyatnopparat Abtract--Thi paper preent a per unit gregation model for repreenting a group of three-phae
epreentation of a Group of Three-phae Induction Motor Uing Per Unit Aggregation Model A.Kunakorn and T.Banyatnopparat Abtract--Thi paper preent a per unit gregation model for repreenting a group of three-phae
Linear Motion, Speed & Velocity
 Add Important Linear Motion, Speed & Velocity Page: 136 Linear Motion, Speed & Velocity NGSS Standard: N/A MA Curriculum Framework (006): 1.1, 1. AP Phyic 1 Learning Objective: 3.A.1.1, 3.A.1.3 Knowledge/Undertanding
Add Important Linear Motion, Speed & Velocity Page: 136 Linear Motion, Speed & Velocity NGSS Standard: N/A MA Curriculum Framework (006): 1.1, 1. AP Phyic 1 Learning Objective: 3.A.1.1, 3.A.1.3 Knowledge/Undertanding
NAME (pinyin/italian)... MATRICULATION NUMBER... SIGNATURE
... MATRICULATION NUMBER... SIGNATURE") POLITONG SHANGHAI BASIC AUTOMATIC CONTROL June Academic Year / Exam grade NAME (pinyin/italian)... MATRICULATION NUMBER... SIGNATURE Ue only thee page (including the bac) for anwer. Do not ue additional
POLITONG SHANGHAI BASIC AUTOMATIC CONTROL June Academic Year / Exam grade NAME (pinyin/italian)... MATRICULATION NUMBER... SIGNATURE Ue only thee page (including the bac) for anwer. Do not ue additional
SIMON FRASER UNIVERSITY School of Engineering Science ENSC 320 Electric Circuits II. R 4 := 100 kohm
 SIMON FRASER UNIVERSITY School of Engineering Science ENSC 320 Electric Circuit II Solution to Aignment 3 February 2003. Cacaded Op Amp [DC&L, problem 4.29] An ideal op amp ha an output impedance of zero,
SIMON FRASER UNIVERSITY School of Engineering Science ENSC 320 Electric Circuit II Solution to Aignment 3 February 2003. Cacaded Op Amp [DC&L, problem 4.29] An ideal op amp ha an output impedance of zero,
Lecture 4. Chapter 11 Nise. Controller Design via Frequency Response. G. Hovland 2004
 METR4200 Advanced Control Lecture 4 Chapter Nie Controller Deign via Frequency Repone G. Hovland 2004 Deign Goal Tranient repone via imple gain adjutment Cacade compenator to improve teady-tate error Cacade
METR4200 Advanced Control Lecture 4 Chapter Nie Controller Deign via Frequency Repone G. Hovland 2004 Deign Goal Tranient repone via imple gain adjutment Cacade compenator to improve teady-tate error Cacade
ECE382/ME482 Spring 2004 Homework 4 Solution November 14,
 ECE382/ME482 Spring 2004 Homework 4 Solution November 14, 2005 1 Solution to HW4 AP4.3 Intead of a contant or tep reference input, we are given, in thi problem, a more complicated reference path, r(t)
ECE382/ME482 Spring 2004 Homework 4 Solution November 14, 2005 1 Solution to HW4 AP4.3 Intead of a contant or tep reference input, we are given, in thi problem, a more complicated reference path, r(t)
Module 4: Time Response of discrete time systems Lecture Note 1
 Digital Control Module 4 Lecture Module 4: ime Repone of dicrete time ytem Lecture Note ime Repone of dicrete time ytem Abolute tability i a baic requirement of all control ytem. Apart from that, good
Digital Control Module 4 Lecture Module 4: ime Repone of dicrete time ytem Lecture Note ime Repone of dicrete time ytem Abolute tability i a baic requirement of all control ytem. Apart from that, good
Automatic Control Systems. Part III: Root Locus Technique
 www.pdhcenter.com PDH Coure E40 www.pdhonline.org Automatic Control Sytem Part III: Root Locu Technique By Shih-Min Hu, Ph.D., P.E. Page of 30 www.pdhcenter.com PDH Coure E40 www.pdhonline.org VI. Root
www.pdhcenter.com PDH Coure E40 www.pdhonline.org Automatic Control Sytem Part III: Root Locu Technique By Shih-Min Hu, Ph.D., P.E. Page of 30 www.pdhcenter.com PDH Coure E40 www.pdhonline.org VI. Root
Control Systems Analysis and Design by the Root-Locus Method
 6 Control Sytem Analyi and Deign by the Root-Locu Method 6 1 INTRODUCTION The baic characteritic of the tranient repone of a cloed-loop ytem i cloely related to the location of the cloed-loop pole. If
6 Control Sytem Analyi and Deign by the Root-Locu Method 6 1 INTRODUCTION The baic characteritic of the tranient repone of a cloed-loop ytem i cloely related to the location of the cloed-loop pole. If
R. W. Erickson. Department of Electrical, Computer, and Energy Engineering University of Colorado, Boulder
 R. W. Erickon Department of Electrical, Computer, and Energy Engineering Univerity of Colorado, Boulder Cloed-loop buck converter example: Section 9.5.4 In ECEN 5797, we ued the CCM mall ignal model to
R. W. Erickon Department of Electrical, Computer, and Energy Engineering Univerity of Colorado, Boulder Cloed-loop buck converter example: Section 9.5.4 In ECEN 5797, we ued the CCM mall ignal model to
Chapter 13. Root Locus Introduction
 Chapter 13 Root Locu 13.1 Introduction In the previou chapter we had a glimpe of controller deign iue through ome imple example. Obviouly when we have higher order ytem, uch imple deign technique will
Chapter 13 Root Locu 13.1 Introduction In the previou chapter we had a glimpe of controller deign iue through ome imple example. Obviouly when we have higher order ytem, uch imple deign technique will
Laplace Transformation
 Univerity of Technology Electromechanical Department Energy Branch Advance Mathematic Laplace Tranformation nd Cla Lecture 6 Page of 7 Laplace Tranformation Definition Suppoe that f(t) i a piecewie continuou
Univerity of Technology Electromechanical Department Energy Branch Advance Mathematic Laplace Tranformation nd Cla Lecture 6 Page of 7 Laplace Tranformation Definition Suppoe that f(t) i a piecewie continuou
EE C128 / ME C134 Problem Set 1 Solution (Fall 2010) Wenjie Chen and Jansen Sheng, UC Berkeley
 Wenjie Chen and Jansen Sheng, UC Berkeley") EE C28 / ME C34 Problem Set Solution (Fall 200) Wenjie Chen and Janen Sheng, UC Berkeley. (0 pt) BIBO tability The ytem h(t) = co(t)u(t) i not BIBO table. What i the region of convergence for H()? A bounded
EE C28 / ME C34 Problem Set Solution (Fall 200) Wenjie Chen and Janen Sheng, UC Berkeley. (0 pt) BIBO tability The ytem h(t) = co(t)u(t) i not BIBO table. What i the region of convergence for H()? A bounded
CHAPTER 8 OBSERVER BASED REDUCED ORDER CONTROLLER DESIGN FOR LARGE SCALE LINEAR DISCRETE-TIME CONTROL SYSTEMS
 CHAPTER 8 OBSERVER BASED REDUCED ORDER CONTROLLER DESIGN FOR LARGE SCALE LINEAR DISCRETE-TIME CONTROL SYSTEMS 8.1 INTRODUCTION 8.2 REDUCED ORDER MODEL DESIGN FOR LINEAR DISCRETE-TIME CONTROL SYSTEMS 8.3
CHAPTER 8 OBSERVER BASED REDUCED ORDER CONTROLLER DESIGN FOR LARGE SCALE LINEAR DISCRETE-TIME CONTROL SYSTEMS 8.1 INTRODUCTION 8.2 REDUCED ORDER MODEL DESIGN FOR LINEAR DISCRETE-TIME CONTROL SYSTEMS 8.3
CHAPTER 4 DESIGN OF STATE FEEDBACK CONTROLLERS AND STATE OBSERVERS USING REDUCED ORDER MODEL
 98 CHAPTER DESIGN OF STATE FEEDBACK CONTROLLERS AND STATE OBSERVERS USING REDUCED ORDER MODEL INTRODUCTION The deign of ytem uing tate pace model for the deign i called a modern control deign and it i
98 CHAPTER DESIGN OF STATE FEEDBACK CONTROLLERS AND STATE OBSERVERS USING REDUCED ORDER MODEL INTRODUCTION The deign of ytem uing tate pace model for the deign i called a modern control deign and it i
Suggested Answers To Exercises. estimates variability in a sampling distribution of random means. About 68% of means fall
 Beyond Significance Teting ( nd Edition), Rex B. Kline Suggeted Anwer To Exercie Chapter. The tatitic meaure variability among core at the cae level. In a normal ditribution, about 68% of the core fall
Beyond Significance Teting ( nd Edition), Rex B. Kline Suggeted Anwer To Exercie Chapter. The tatitic meaure variability among core at the cae level. In a normal ditribution, about 68% of the core fall
Bernoulli s equation may be developed as a special form of the momentum or energy equation.
 BERNOULLI S EQUATION Bernoulli equation may be developed a a pecial form of the momentum or energy equation. Here, we will develop it a pecial cae of momentum equation. Conider a teady incompreible flow
BERNOULLI S EQUATION Bernoulli equation may be developed a a pecial form of the momentum or energy equation. Here, we will develop it a pecial cae of momentum equation. Conider a teady incompreible flow
online learning Unit Workbook 4 RLC Transients
 online learning Pearon BTC Higher National in lectrical and lectronic ngineering (QCF) Unit 5: lectrical & lectronic Principle Unit Workbook 4 in a erie of 4 for thi unit Learning Outcome: RLC Tranient
online learning Pearon BTC Higher National in lectrical and lectronic ngineering (QCF) Unit 5: lectrical & lectronic Principle Unit Workbook 4 in a erie of 4 for thi unit Learning Outcome: RLC Tranient
MAE140 Linear Circuits Fall 2012 Final, December 13th
 MAE40 Linear Circuit Fall 202 Final, December 3th Intruction. Thi exam i open book. You may ue whatever written material you chooe, including your cla note and textbook. You may ue a hand calculator with
MAE40 Linear Circuit Fall 202 Final, December 3th Intruction. Thi exam i open book. You may ue whatever written material you chooe, including your cla note and textbook. You may ue a hand calculator with
R. W. Erickson. Department of Electrical, Computer, and Energy Engineering University of Colorado, Boulder
 R. W. Erickon Department of Electrical, Computer, and Energy Engineering Univerity of Colorado, Boulder ZOH: Sampled Data Sytem Example v T Sampler v* H Zero-order hold H v o e = 1 T 1 v *( ) = v( jkω
R. W. Erickon Department of Electrical, Computer, and Energy Engineering Univerity of Colorado, Boulder ZOH: Sampled Data Sytem Example v T Sampler v* H Zero-order hold H v o e = 1 T 1 v *( ) = v( jkω
EE/ME/AE324: Dynamical Systems. Chapter 8: Transfer Function Analysis
 EE/ME/AE34: Dynamical Sytem Chapter 8: Tranfer Function Analyi The Sytem Tranfer Function Conider the ytem decribed by the nth-order I/O eqn.: ( n) ( n 1) ( m) y + a y + + a y = b u + + bu n 1 0 m 0 Taking
EE/ME/AE34: Dynamical Sytem Chapter 8: Tranfer Function Analyi The Sytem Tranfer Function Conider the ytem decribed by the nth-order I/O eqn.: ( n) ( n 1) ( m) y + a y + + a y = b u + + bu n 1 0 m 0 Taking
Control Systems Engineering ( Chapter 7. Steady-State Errors ) Prof. Kwang-Chun Ho Tel: Fax:
 Prof. Kwang-Chun Ho Tel: Fax:") Control Sytem Engineering ( Chapter 7. Steady-State Error Prof. Kwang-Chun Ho kwangho@hanung.ac.kr Tel: 0-760-453 Fax:0-760-4435 Introduction In thi leon, you will learn the following : How to find the
Control Sytem Engineering ( Chapter 7. Steady-State Error Prof. Kwang-Chun Ho kwangho@hanung.ac.kr Tel: 0-760-453 Fax:0-760-4435 Introduction In thi leon, you will learn the following : How to find the
March 18, 2014 Academic Year 2013/14
 POLITONG - SHANGHAI BASIC AUTOMATIC CONTROL Exam grade March 8, 4 Academic Year 3/4 NAME (Pinyin/Italian)... STUDENT ID Ue only thee page (including the back) for anwer. Do not ue additional heet. Ue of
POLITONG - SHANGHAI BASIC AUTOMATIC CONTROL Exam grade March 8, 4 Academic Year 3/4 NAME (Pinyin/Italian)... STUDENT ID Ue only thee page (including the back) for anwer. Do not ue additional heet. Ue of
μ + = σ = D 4 σ = D 3 σ = σ = All units in parts (a) and (b) are in V. (1) x chart: Center = μ = 0.75 UCL =
 and (b) are in V. (1) x chart: Center = μ = 0.75 UCL =") Our online Tutor are available 4*7 to provide Help with Proce control ytem Homework/Aignment or a long term Graduate/Undergraduate Proce control ytem Project. Our Tutor being experienced and proficient
Our online Tutor are available 4*7 to provide Help with Proce control ytem Homework/Aignment or a long term Graduate/Undergraduate Proce control ytem Project. Our Tutor being experienced and proficient
Root Locus Diagram. Root loci: The portion of root locus when k assume positive values: that is 0
 Objective Root Locu Diagram Upon completion of thi chapter you will be able to: Plot the Root Locu for a given Tranfer Function by varying gain of the ytem, Analye the tability of the ytem from the root
Objective Root Locu Diagram Upon completion of thi chapter you will be able to: Plot the Root Locu for a given Tranfer Function by varying gain of the ytem, Analye the tability of the ytem from the root
Lecture 15 - Current. A Puzzle... Advanced Section: Image Charge for Spheres. Image Charge for a Grounded Spherical Shell
 Lecture 15 - Current Puzzle... Suppoe an infinite grounded conducting plane lie at z = 0. charge q i located at a height h above the conducting plane. Show in three different way that the potential below
Lecture 15 - Current Puzzle... Suppoe an infinite grounded conducting plane lie at z = 0. charge q i located at a height h above the conducting plane. Show in three different way that the potential below
PHYSICS LAB Experiment 5 Fall 2004 FRICTION
 FRICTION In thi experiment we will meaure the effect of friction on the motion of a body in contact with a particular urface. When a body lide or roll over another, it motion i oppoed by the force of friction
FRICTION In thi experiment we will meaure the effect of friction on the motion of a body in contact with a particular urface. When a body lide or roll over another, it motion i oppoed by the force of friction
Advanced D-Partitioning Analysis and its Comparison with the Kharitonov s Theorem Assessment
 Journal of Multidiciplinary Engineering Science and Technology (JMEST) ISSN: 59- Vol. Iue, January - 5 Advanced D-Partitioning Analyi and it Comparion with the haritonov Theorem Aement amen M. Yanev Profeor,
Journal of Multidiciplinary Engineering Science and Technology (JMEST) ISSN: 59- Vol. Iue, January - 5 Advanced D-Partitioning Analyi and it Comparion with the haritonov Theorem Aement amen M. Yanev Profeor,
ECE 325 Electric Energy System Components 6- Three-Phase Induction Motors. Instructor: Kai Sun Fall 2015
 ECE 35 Electric Energy Sytem Component 6- Three-Phae Induction Motor Intructor: Kai Sun Fall 015 1 Content (Material are from Chapter 13-15) Component and baic principle Selection and application Equivalent
ECE 35 Electric Energy Sytem Component 6- Three-Phae Induction Motor Intructor: Kai Sun Fall 015 1 Content (Material are from Chapter 13-15) Component and baic principle Selection and application Equivalent
EE Control Systems LECTURE 14
 Updated: Tueday, March 3, 999 EE 434 - Control Sytem LECTURE 4 Copyright FL Lewi 999 All right reerved ROOT LOCUS DESIGN TECHNIQUE Suppoe the cloed-loop tranfer function depend on a deign parameter k We
Updated: Tueday, March 3, 999 EE 434 - Control Sytem LECTURE 4 Copyright FL Lewi 999 All right reerved ROOT LOCUS DESIGN TECHNIQUE Suppoe the cloed-loop tranfer function depend on a deign parameter k We
Improving Power System Transient Stability with Static Synchronous Series Compensator
 American Journal of Applied Science 8 (1): 77-81, 2011 ISSN 1546-9239 2010 Science Pulication Improving Power Sytem Tranient Staility with Static Synchronou Serie Compenator Prechanon Kumkratug Diviion
American Journal of Applied Science 8 (1): 77-81, 2011 ISSN 1546-9239 2010 Science Pulication Improving Power Sytem Tranient Staility with Static Synchronou Serie Compenator Prechanon Kumkratug Diviion
Design of Digital Filters
 Deign of Digital Filter Paley-Wiener Theorem [ ] ( ) If h n i a caual energy ignal, then ln H e dω< B where B i a finite upper bound. One implication of the Paley-Wiener theorem i that a tranfer function
Deign of Digital Filter Paley-Wiener Theorem [ ] ( ) If h n i a caual energy ignal, then ln H e dω< B where B i a finite upper bound. One implication of the Paley-Wiener theorem i that a tranfer function
Solving Differential Equations by the Laplace Transform and by Numerical Methods
 36CH_PHCalter_TechMath_95099 3//007 :8 PM Page Solving Differential Equation by the Laplace Tranform and by Numerical Method OBJECTIVES When you have completed thi chapter, you hould be able to: Find the
36CH_PHCalter_TechMath_95099 3//007 :8 PM Page Solving Differential Equation by the Laplace Tranform and by Numerical Method OBJECTIVES When you have completed thi chapter, you hould be able to: Find the
Chapter 2 Sampling and Quantization. In order to investigate sampling and quantization, the difference between analog
 Chapter Sampling and Quantization.1 Analog and Digital Signal In order to invetigate ampling and quantization, the difference between analog and digital ignal mut be undertood. Analog ignal conit of continuou
Chapter Sampling and Quantization.1 Analog and Digital Signal In order to invetigate ampling and quantization, the difference between analog and digital ignal mut be undertood. Analog ignal conit of continuou
Function and Impulse Response
 Tranfer Function and Impule Repone Solution of Selected Unolved Example. Tranfer Function Q.8 Solution : The -domain network i hown in the Fig... Applying VL to the two loop, R R R I () I () L I () L V()
Tranfer Function and Impule Repone Solution of Selected Unolved Example. Tranfer Function Q.8 Solution : The -domain network i hown in the Fig... Applying VL to the two loop, R R R I () I () L I () L V()
Overview: Induction Motors. Review Questions. Why the Rotor Moves: Motor Speed
 Overview: nduction Motor Motor operation & Slip Speed-torque relationhip Equivalent circuit model Tranformer Motor efficiency Starting induction motor Smith College, EGR 35 ovember 5, 04 Review Quetion
Overview: nduction Motor Motor operation & Slip Speed-torque relationhip Equivalent circuit model Tranformer Motor efficiency Starting induction motor Smith College, EGR 35 ovember 5, 04 Review Quetion
GNSS Solutions: What is the carrier phase measurement? How is it generated in GNSS receivers? Simply put, the carrier phase
 GNSS Solution: Carrier phae and it meaurement for GNSS GNSS Solution i a regular column featuring quetion and anwer about technical apect of GNSS. Reader are invited to end their quetion to the columnit,
GNSS Solution: Carrier phae and it meaurement for GNSS GNSS Solution i a regular column featuring quetion and anwer about technical apect of GNSS. Reader are invited to end their quetion to the columnit,
J. Electrical Systems 8-1 (2012): Regular paper
: Regular paper") K.R.M. Vijaya Chandrakala S. Balamurugan K. Sankaranarayanan J. Electrical Sytem 8- (22): 85-94 Regular paper Damping of Tie-Line Power Ocillation in Interconnected Power Sytem uing Variable Structure
K.R.M. Vijaya Chandrakala S. Balamurugan K. Sankaranarayanan J. Electrical Sytem 8- (22): 85-94 Regular paper Damping of Tie-Line Power Ocillation in Interconnected Power Sytem uing Variable Structure
CONTROL SYSTEMS. Chapter 2 : Block Diagram & Signal Flow Graphs GATE Objective & Numerical Type Questions
 ONTOL SYSTEMS hapter : Bloc Diagram & Signal Flow Graph GATE Objective & Numerical Type Quetion Quetion 6 [Practice Boo] [GATE E 994 IIT-Kharagpur : 5 Mar] educe the ignal flow graph hown in figure below,
ONTOL SYSTEMS hapter : Bloc Diagram & Signal Flow Graph GATE Objective & Numerical Type Quetion Quetion 6 [Practice Boo] [GATE E 994 IIT-Kharagpur : 5 Mar] educe the ignal flow graph hown in figure below,
Singular perturbation theory
 Singular perturbation theory Marc R. Rouel June 21, 2004 1 Introduction When we apply the teady-tate approximation (SSA) in chemical kinetic, we typically argue that ome of the intermediate are highly
Singular perturbation theory Marc R. Rouel June 21, 2004 1 Introduction When we apply the teady-tate approximation (SSA) in chemical kinetic, we typically argue that ome of the intermediate are highly
Source slideplayer.com/fundamentals of Analytical Chemistry, F.J. Holler, S.R.Crouch. Chapter 6: Random Errors in Chemical Analysis
 Source lideplayer.com/fundamental of Analytical Chemitry, F.J. Holler, S.R.Crouch Chapter 6: Random Error in Chemical Analyi Random error are preent in every meaurement no matter how careful the experimenter.
Source lideplayer.com/fundamental of Analytical Chemitry, F.J. Holler, S.R.Crouch Chapter 6: Random Error in Chemical Analyi Random error are preent in every meaurement no matter how careful the experimenter.
1 Routh Array: 15 points
 EE C28 / ME34 Problem Set 3 Solution Fall 2 Routh Array: 5 point Conider the ytem below, with D() k(+), w(t), G() +2, and H y() 2 ++2 2(+). Find the cloed loop tranfer function Y () R(), and range of k
EE C28 / ME34 Problem Set 3 Solution Fall 2 Routh Array: 5 point Conider the ytem below, with D() k(+), w(t), G() +2, and H y() 2 ++2 2(+). Find the cloed loop tranfer function Y () R(), and range of k
Synchronous Machines - Structure
 Synchronou Machine - Structure Synchronou Machine - Structure rotate at contant peed. primary energy converion device of the word electric power ytem. both generator and motor operation can draw either
Synchronou Machine - Structure Synchronou Machine - Structure rotate at contant peed. primary energy converion device of the word electric power ytem. both generator and motor operation can draw either
Stability. ME 344/144L Prof. R.G. Longoria Dynamic Systems and Controls/Lab. Department of Mechanical Engineering The University of Texas at Austin
 Stability The tability of a ytem refer to it ability or tendency to eek a condition of tatic equilibrium after it ha been diturbed. If given a mall perturbation from the equilibrium, it i table if it return.
Stability The tability of a ytem refer to it ability or tendency to eek a condition of tatic equilibrium after it ha been diturbed. If given a mall perturbation from the equilibrium, it i table if it return.
MM1: Basic Concept (I): System and its Variables
: System and its Variables") MM1: Baic Concept (I): Sytem and it Variable A ytem i a collection of component which are coordinated together to perform a function Sytem interact with their environment. The interaction i defined in
MM1: Baic Concept (I): Sytem and it Variable A ytem i a collection of component which are coordinated together to perform a function Sytem interact with their environment. The interaction i defined in
EE Control Systems LECTURE 6
 Copyright FL Lewi 999 All right reerved EE - Control Sytem LECTURE 6 Updated: Sunday, February, 999 BLOCK DIAGRAM AND MASON'S FORMULA A linear time-invariant (LTI) ytem can be repreented in many way, including:
Copyright FL Lewi 999 All right reerved EE - Control Sytem LECTURE 6 Updated: Sunday, February, 999 BLOCK DIAGRAM AND MASON'S FORMULA A linear time-invariant (LTI) ytem can be repreented in many way, including:
NCAAPMT Calculus Challenge Challenge #3 Due: October 26, 2011
 NCAAPMT Calculu Challenge 011 01 Challenge #3 Due: October 6, 011 A Model of Traffic Flow Everyone ha at ome time been on a multi-lane highway and encountered road contruction that required the traffic
NCAAPMT Calculu Challenge 011 01 Challenge #3 Due: October 6, 011 A Model of Traffic Flow Everyone ha at ome time been on a multi-lane highway and encountered road contruction that required the traffic
5.5 Application of Frequency Response: Signal Filters
 44 Dynamic Sytem Second order lowpa filter having tranfer function H()=H ()H () u H () H () y Firt order lowpa filter Figure 5.5: Contruction of a econd order low-pa filter by combining two firt order
44 Dynamic Sytem Second order lowpa filter having tranfer function H()=H ()H () u H () H () y Firt order lowpa filter Figure 5.5: Contruction of a econd order low-pa filter by combining two firt order
A Simplified Dynamics Block Diagram for a Four-Axis Stabilized Platform
 A Simplified Dynamic Block Diagram for a FourAxi Stabilized Platform Author: Hendrik Daniël Mouton a Univerity of Cape Town, Rondeboch, Cape Town, South Africa, 770 Abtract: t i relatively traightforward
A Simplified Dynamic Block Diagram for a FourAxi Stabilized Platform Author: Hendrik Daniël Mouton a Univerity of Cape Town, Rondeboch, Cape Town, South Africa, 770 Abtract: t i relatively traightforward
Lecture #9 Continuous time filter
 Lecture #9 Continuou time filter Oliver Faut December 5, 2006 Content Review. Motivation......................................... 2 2 Filter pecification 2 2. Low pa..........................................
Lecture #9 Continuou time filter Oliver Faut December 5, 2006 Content Review. Motivation......................................... 2 2 Filter pecification 2 2. Low pa..........................................
Coupling of Three-Phase Sequence Circuits Due to Line and Load Asymmetries
 Coupling of Three-Phae Sequence Circuit Due to Line and Load Aymmetrie DEGO BELLAN Department of Electronic nformation and Bioengineering Politecnico di Milano Piazza Leonardo da inci 01 Milano TALY diego.ellan@polimi.it
Coupling of Three-Phae Sequence Circuit Due to Line and Load Aymmetrie DEGO BELLAN Department of Electronic nformation and Bioengineering Politecnico di Milano Piazza Leonardo da inci 01 Milano TALY diego.ellan@polimi.it
Figure 1 Siemens PSSE Web Site
 Stability Analyi of Dynamic Sytem. In the lat few lecture we have een how mall ignal Lalace domain model may be contructed of the dynamic erformance of ower ytem. The tability of uch ytem i a matter of
Stability Analyi of Dynamic Sytem. In the lat few lecture we have een how mall ignal Lalace domain model may be contructed of the dynamic erformance of ower ytem. The tability of uch ytem i a matter of
Comparison of Hardware Tests with SIMULINK Models of UW Microgrid
 Comparion of Hardware Tet with SIMULINK Model of UW Microgrid Introduction Thi report include a detailed dicuion of the microource available on the Univerity- of- Wiconin microgrid. Thi include detail
Comparion of Hardware Tet with SIMULINK Model of UW Microgrid Introduction Thi report include a detailed dicuion of the microource available on the Univerity- of- Wiconin microgrid. Thi include detail
The Laplace Transform , Haynes Miller and Jeremy Orloff
 The Laplace Tranform 8.3, Hayne Miller and Jeremy Orloff Laplace tranform baic: introduction An operator take a function a input and output another function. A tranform doe the ame thing with the added
The Laplace Tranform 8.3, Hayne Miller and Jeremy Orloff Laplace tranform baic: introduction An operator take a function a input and output another function. A tranform doe the ame thing with the added
Analysis of Prevention of Induction Motors Stalling by Capacitor Switching
 16th NTIONL POWER SYSTEMS CONFERENCE, 15th-17th DECEMER, 2010 260 nalyi of Prevention of Induction Motor Stalling by Capacitor Switching S.Maheh and P.S Nagendra rao Department of Electrical Engineering
16th NTIONL POWER SYSTEMS CONFERENCE, 15th-17th DECEMER, 2010 260 nalyi of Prevention of Induction Motor Stalling by Capacitor Switching S.Maheh and P.S Nagendra rao Department of Electrical Engineering
Lecture 17: Analytic Functions and Integrals (See Chapter 14 in Boas)
") Lecture 7: Analytic Function and Integral (See Chapter 4 in Boa) Thi i a good point to take a brief detour and expand on our previou dicuion of complex variable and complex function of complex variable.
Lecture 7: Analytic Function and Integral (See Chapter 4 in Boa) Thi i a good point to take a brief detour and expand on our previou dicuion of complex variable and complex function of complex variable.
MAE 101A. Homework 3 Solutions 2/5/2018
 MAE 101A Homework 3 Solution /5/018 Munon 3.6: What preure gradient along the treamline, /d, i required to accelerate water upward in a vertical pipe at a rate of 30 ft/? What i the anwer if the flow i
MAE 101A Homework 3 Solution /5/018 Munon 3.6: What preure gradient along the treamline, /d, i required to accelerate water upward in a vertical pipe at a rate of 30 ft/? What i the anwer if the flow i
Dimensional Analysis A Tool for Guiding Mathematical Calculations
 Dimenional Analyi A Tool for Guiding Mathematical Calculation Dougla A. Kerr Iue 1 February 6, 2010 ABSTRACT AND INTRODUCTION In converting quantitie from one unit to another, we may know the applicable
Dimenional Analyi A Tool for Guiding Mathematical Calculation Dougla A. Kerr Iue 1 February 6, 2010 ABSTRACT AND INTRODUCTION In converting quantitie from one unit to another, we may know the applicable
EE 508 Lecture 16. Filter Transformations. Lowpass to Bandpass Lowpass to Highpass Lowpass to Band-reject
 EE 508 Lecture 6 Filter Tranformation Lowpa to Bandpa Lowpa to Highpa Lowpa to Band-reject Review from Lat Time Theorem: If the perimeter variation and contact reitance are neglected, the tandard deviation
EE 508 Lecture 6 Filter Tranformation Lowpa to Bandpa Lowpa to Highpa Lowpa to Band-reject Review from Lat Time Theorem: If the perimeter variation and contact reitance are neglected, the tandard deviation
State Space: Observer Design Lecture 11
 State Space: Oberver Deign Lecture Advanced Control Sytem Dr Eyad Radwan Dr Eyad Radwan/ACS/ State Space-L Controller deign relie upon acce to the tate variable for feedback through adjutable gain. Thi
State Space: Oberver Deign Lecture Advanced Control Sytem Dr Eyad Radwan Dr Eyad Radwan/ACS/ State Space-L Controller deign relie upon acce to the tate variable for feedback through adjutable gain. Thi
NOTE: The items d) and e) of Question 4 gave you bonus marks.
 and e) of Question 4 gave you bonus marks.") MAE 40 Linear ircuit Summer 2007 Final Solution NOTE: The item d) and e) of Quetion 4 gave you bonu mark. Quetion [Equivalent irciut] [4 mark] Find the equivalent impedance between terminal A and B in
MAE 40 Linear ircuit Summer 2007 Final Solution NOTE: The item d) and e) of Quetion 4 gave you bonu mark. Quetion [Equivalent irciut] [4 mark] Find the equivalent impedance between terminal A and B in
Lecture 8. PID control. Industrial process control ( today) PID control. Insights about PID actions
 PID control. Insights about PID actions") Lecture 8. PID control. The role of P, I, and D action 2. PID tuning Indutrial proce control (92... today) Feedback control i ued to improve the proce performance: tatic performance: for contant reference,
Lecture 8. PID control. The role of P, I, and D action 2. PID tuning Indutrial proce control (92... today) Feedback control i ued to improve the proce performance: tatic performance: for contant reference,
Feedback Control Systems (FCS)
") Feedback Control Sytem (FCS) Lecture19-20 Routh-Herwitz Stability Criterion Dr. Imtiaz Huain email: imtiaz.huain@faculty.muet.edu.pk URL :http://imtiazhuainkalwar.weebly.com/ Stability of Higher Order
Feedback Control Sytem (FCS) Lecture19-20 Routh-Herwitz Stability Criterion Dr. Imtiaz Huain email: imtiaz.huain@faculty.muet.edu.pk URL :http://imtiazhuainkalwar.weebly.com/ Stability of Higher Order
Delhi Noida Bhopal Hyderabad Jaipur Lucknow Indore Pune Bhubaneswar Kolkata Patna Web: Ph:
 Serial :. PT_EE_A+C_Control Sytem_798 Delhi Noida Bhopal Hyderabad Jaipur Lucknow Indore Pune Bhubanewar olkata Patna Web: E-mail: info@madeeay.in Ph: -4546 CLASS TEST 8-9 ELECTRICAL ENGINEERING Subject
Serial :. PT_EE_A+C_Control Sytem_798 Delhi Noida Bhopal Hyderabad Jaipur Lucknow Indore Pune Bhubanewar olkata Patna Web: E-mail: info@madeeay.in Ph: -4546 CLASS TEST 8-9 ELECTRICAL ENGINEERING Subject
Wolfgang Hofle. CERN CAS Darmstadt, October W. Hofle feedback systems
 Wolfgang Hofle Wolfgang.Hofle@cern.ch CERN CAS Darmtadt, October 9 Feedback i a mechanim that influence a ytem by looping back an output to the input a concept which i found in abundance in nature and
Wolfgang Hofle Wolfgang.Hofle@cern.ch CERN CAS Darmtadt, October 9 Feedback i a mechanim that influence a ytem by looping back an output to the input a concept which i found in abundance in nature and
Halliday/Resnick/Walker 7e Chapter 6
 HRW 7e Chapter 6 Page of Halliday/Renick/Walker 7e Chapter 6 3. We do not conider the poibility that the bureau might tip, and treat thi a a purely horizontal motion problem (with the peron puh F in the
HRW 7e Chapter 6 Page of Halliday/Renick/Walker 7e Chapter 6 3. We do not conider the poibility that the bureau might tip, and treat thi a a purely horizontal motion problem (with the peron puh F in the