Simulation Methods for Stochastic Storage Problems: A Statistical Learning Perspective
|
|
|
- Magnus Ferguson
- 5 years ago
- Views:
Transcription
1 Simulation Methods for Stochastic Storage Problems: A Statistical Learning Perspective Aditya Maheshwari Joint work with: Dr. Michael Ludkovski Department of Statistics and Applied Probability University of California, Santa Barbara 9th Western Conference on Mathematical Finance Aditya Maheshwari (UCSB) Simulation Methods for Stochastic Storage 1 / 24
2 Outline 1 Stochastic storage 2 Dynamic Emulation Algorithm 3 Numerical Illustrations 4 Conclusion Aditya Maheshwari (UCSB) Simulation Methods for Stochastic Storage 2 / 24
3 Stochastic Storage: An optimal switching problem A storage problem has two key components: Stochastic Risk factors (autonomous dynamics). An inventory variable (fully controlled). Dynamics of the inventory is controlled via storage regimes (typically finite, > 2). In comparison, optimal stopping (American option pricing) has only two regimes: {continue, stop} and stochastic factors. Aditya Maheshwari (UCSB) Simulation Methods for Stochastic Storage 3 / 24
4 Stochastic Storage: An optimal switching problem A storage problem has two key components: Stochastic Risk factors (autonomous dynamics). An inventory variable (fully controlled). Dynamics of the inventory is controlled via storage regimes (typically finite, > 2). In comparison, optimal stopping (American option pricing) has only two regimes: {continue, stop} and stochastic factors. In today s talk we will discuss: A new modular algorithm (and its features) for optimal switching, combining Design of Experiments with Machine learning. Gaussian Process as a basis-free method for approximating continuation value. Aditya Maheshwari (UCSB) Simulation Methods for Stochastic Storage 3 / 24
5 Optimal switching problems Gas storage valuation: A classic example Gas prices as stochastic factor with dynamics P tk+1 = P tk + b(t k, P tk ) t + σ(t k, P tk ) W tk. Inventory variable: I tk+1 = I tk + a(c tk ) t, I tk [0, I max ]. Control c tk represents rate of injection/withdrawal or holding, fully determined by storage regime m tk+1 {inject, withdraw, hold}. Objective: Create a policy m tk+1 = M(t k, P tk, I tk, m tk ) which maximizes the expected profit v(t 0, P t0, I t0, m t0 ) in the horizon [0, T ]. Aditya Maheshwari (UCSB) Simulation Methods for Stochastic Storage 4 / 24
6 Optimal switching problems Gas storage valuation: A classic example Gas prices as stochastic factor with dynamics P tk+1 = P tk + b(t k, P tk ) t + σ(t k, P tk ) W tk. Inventory variable: I tk+1 = I tk + a(c tk ) t, I tk [0, I max ]. Control c tk represents rate of injection/withdrawal or holding, fully determined by storage regime m tk+1 {inject, withdraw, hold}. Objective: Create a policy m tk+1 = M(t k, P tk, I tk, m tk ) which maximizes the expected profit v(t 0, P t0, I t0, m t0 ) in the horizon [0, T ]. Microgrid control Electric load and renewable output as stochastic factors. Battery storage system as inventory, controlled via backup diesel generator. Objective: Create a policy to match demand and supply of electricity and maximize the negative expected cost. Aditya Maheshwari (UCSB) Simulation Methods for Stochastic Storage 4 / 24
7 Value Function and DPE for Gas storage sup E m tk Value Function V (t k, P tk, I tk, m tk ) = [ K 1 ] e r(ts t k ) π (P ts, m ts, m ts+1 ) + e r(t t k ) W (P T, I T ) P tk, I tk, m tk, s=k where π incorporates the revenue and the switching cost. Aditya Maheshwari (UCSB) Simulation Methods for Stochastic Storage 5 / 24
8 Value Function and DPE for Gas storage sup E m tk Value Function V (t k, P tk, I tk, m tk ) = [ K 1 ] e r(ts t k ) π (P ts, m ts, m ts+1 ) + e r(t t k ) W (P T, I T ) P tk, I tk, m tk, s=k where π incorporates the revenue and the switching cost. Dynamic Programming Equation [ ] V (t k, P tk, I tk, m tk ) = max E π (P tk, m tk, m) + e r t V (t k+1, P tk+1, I tk+1, m) P tk m J Aditya Maheshwari (UCSB) Simulation Methods for Stochastic Storage 5 / 24
9 Value Function and DPE for Gas storage sup E m tk Value Function V (t k, P tk, I tk, m tk ) = [ K 1 ] e r(ts t k ) π (P ts, m ts, m ts+1 ) + e r(t t k ) W (P T, I T ) P tk, I tk, m tk, s=k where π incorporates the revenue and the switching cost. Dynamic Programming Equation [ ] V (t k, P tk, I tk, m tk ) = max E π (P tk, m tk, m) + e r t V (t k+1, P tk+1, I tk+1, m) P tk m J Optimal Control m (t k, P, I, m) = arg max j J { π (P, m, j) + e r t q(t k, P, I + a(c tk (j)) t, j) }, where Continuation Value q(t k, P, I, m) := E [ V (t k+1, P tk+1, I, m) P tk = P ] Aditya Maheshwari (UCSB) Simulation Methods for Stochastic Storage 5 / 24
10 Inventory Residual demand Inventory/Diesel power Price A picture is worth a thousand words Residual demand Inventory Diesel Power time (in years) time (in days) Gas Storage Microgrid A pathwise trajectory for two examples Gas Storage Buy low and sell high. Microgrid Switch ON/OFF the generator to match demand and charge battery. Aditya Maheshwari (UCSB) Simulation Methods for Stochastic Storage 6 / 24







11 Control Maps Gas Storage m (P, I, +1) Microgrid c (X, I, +1) Optimal Policy How to efficiently estimate the maps m (P, I, m)? Aditya Maheshwari (UCSB) Simulation Methods for Stochastic Storage 7 / 24
12 Contributions A new algorithm Dynamic Emulation Algorithm(DEA) Flexible modular template by reformulating optimal switching problem as recursive statistical learning. Memory efficient and Scalable via smart simulation/regressions. Several new simulation designs which are dynamic, explores the space and exploits the distributional content. Gaussian Process Regression: a non-parametric tool for approximating the continuation function q(t k,,, m) Aditya Maheshwari (UCSB) Simulation Methods for Stochastic Storage 8 / 24
13 Outline 1 Stochastic storage 2 Dynamic Emulation Algorithm 3 Numerical Illustrations 4 Conclusion Aditya Maheshwari (UCSB) Simulation Methods for Stochastic Storage 9 / 24
14 Demand Demand Demand Demand Traditional Implementation time time time time Simulate paths and set t = T 1 Evaluate V (t + 1,,, ) Regression for estimating q(t,,, ) set t t 1 Paths for the exogenous process is simulated and stored for [0,T]. Controlled trajectory I t cannot be simulated. So, replicate the exogenous process P t /X t for all possible values of I t. Non-parametric regression methods are very slow since we need 10 4 paths for reasonable estimation. Aditya Maheshwari (UCSB) Simulation Methods for Stochastic Storage 10 / 24
15 Demand Demand Demand Demand Dynamic Emulation Algorithm (DEA) time time time time set t = T 1 Generate design, simulate one-step paths Evaluate V (t + 1,,, ) Regression for estimating q(t,,, ) set t t 1 Stochastic simulation for sequential learning of q. Both design and regression affects the quality of the solution. Smart design Improved learning. Aditya Maheshwari (UCSB) Simulation Methods for Stochastic Storage 11 / 24
16 Inventory Inventory Design Space Filling Design Sobol QMC Sequences: Theoretical guarantees on uniform space filling. Latin Hypercube Sampling (LHS): Probabilistic counterpart of QMC sequences Price Price 2D Sobol QMC sequence 2D LHS design Aditya Maheshwari (UCSB) Simulation Methods for Stochastic Storage 12 / 24
17 Inventory Inventory Design Probabilistic Design: Mimics the distribution of (P, I ). Too targeted, fails to explore the space. Gridded Design: Probabilistic in P and equally spaced in I Price Price Joint Probabilistic design Conventional product design Aditya Maheshwari (UCSB) Simulation Methods for Stochastic Storage 13 / 24
18 Inventory Inventory Design Probabilistic Design: Mimics the distribution of (P, I ). Too targeted, fails to explore the space. Gridded Design: Probabilistic in P and equally spaced in I Price Price Joint Probabilistic design Conventional product design Mixture Design: Combination of space filling and probabilistic designs (exploration-exploitation tradeoff). Aditya Maheshwari (UCSB) Simulation Methods for Stochastic Storage 13 / 24
19 Stochastic Simulator (at time t k ) v n k+1 Choose the design D k := (P n t k, I n t k+1, m n t k+1, n = 1,..., N k ). Generate one-step paths P n t k P n t k+1. Calculate one-step-ahead pathwise profits: { } := max π (Pt n j J k+1, mt n k+1, j) + e r t ˆq(t k+1, Pt n k+1, It n k+1 + a(c(j)) t, j) Aditya Maheshwari (UCSB) Simulation Methods for Stochastic Storage 14 / 24
20 Stochastic Simulator (at time t k ) v n k+1 Choose the design D k := (P n t k, I n t k+1, m n t k+1, n = 1,..., N k ). Generate one-step paths P n t k P n t k+1. Calculate one-step-ahead pathwise profits: { } := max π (Pt n j J k+1, mt n k+1, j) + e r t ˆq(t k+1, Pt n k+1, It n k+1 + a(c(j)) t, j) Learn the input-output relationship between (P tk, I tk+1, m tk+1 ) N k n=1 and (v k+1 ) N k n=1 using L2 projection on an approximation space H k. ˆq(t k,,, ) = arg min htk H k N n=1 h tk (Pt n k, It n k+1, mt n k+1 ) vk+1 n 2. Example: H k = span(φ 1,..., φ R ) and h tk ( ) = R i=1 β iφ i ( ) We use Gaussian Process as a new alternate for H. Aditya Maheshwari (UCSB) Simulation Methods for Stochastic Storage 14 / 24
21 Gaussian Process Regression (GPR) Assuming that the input-output relationship as y n = h(x n ) + σ 2 ξ, where ξ N (0, 1), x n = (P n t k, I n t k+1 ) and y n = v n k+1. We assume h( ) is a realization of Gaussian random field. {h(x i )} N i=1 is a sample from the multivariate normal distribution (MVND) with mean {m(x i )} N i=1 and covariance {κ(x i, x j )} N i,j=1. Conditional distribution at new sites x is also multivariate normal i.e. h(x ) (x i, y i ) N i=1 MVND(m (x ), κ (x, x )) Aditya Maheshwari (UCSB) Simulation Methods for Stochastic Storage 15 / 24
22 Gaussian Process Regression (GPR) Assuming that the input-output relationship as y n = h(x n ) + σ 2 ξ, where ξ N (0, 1), x n = (P n t k, I n t k+1 ) and y n = v n k+1. We assume h( ) is a realization of Gaussian random field. {h(x i )} N i=1 is a sample from the multivariate normal distribution (MVND) with mean {m(x i )} N i=1 and covariance {κ(x i, x j )} N i,j=1. Conditional distribution at new sites x is also multivariate normal i.e. h(x ) (x i, y i ) N i=1 MVND(m (x ), κ (x, x )) Advantages of using GPR: Analytic tractability for a non-parametric method. Smooth approximation for the function and even its derivative. Standard error on estimates at any new location x. Aditya Maheshwari (UCSB) Simulation Methods for Stochastic Storage 15 / 24
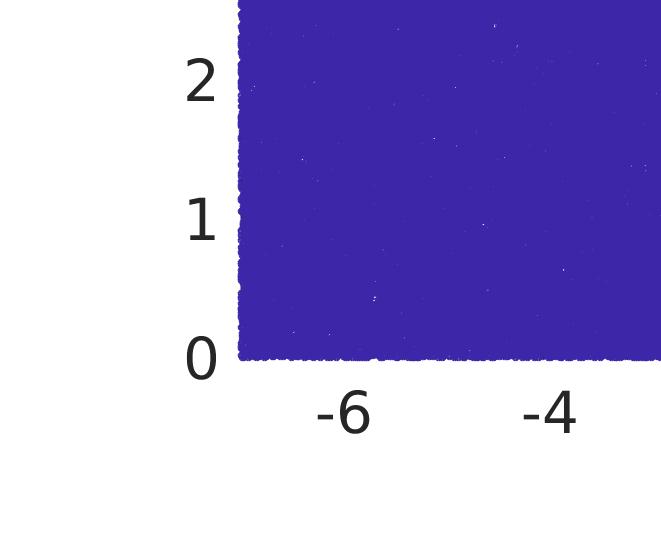
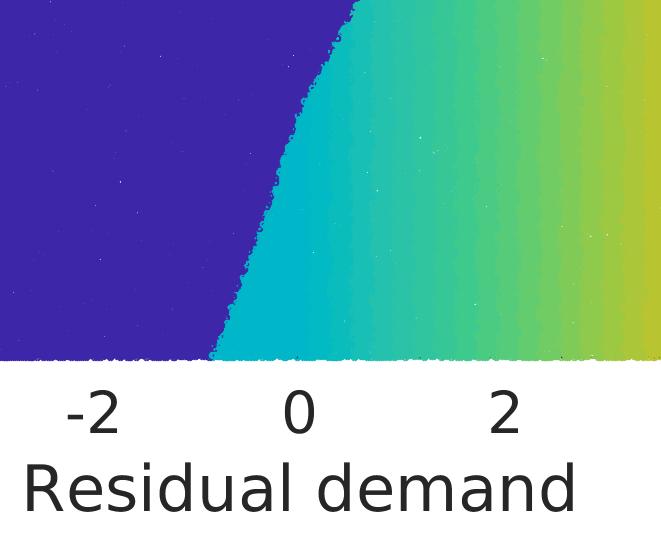
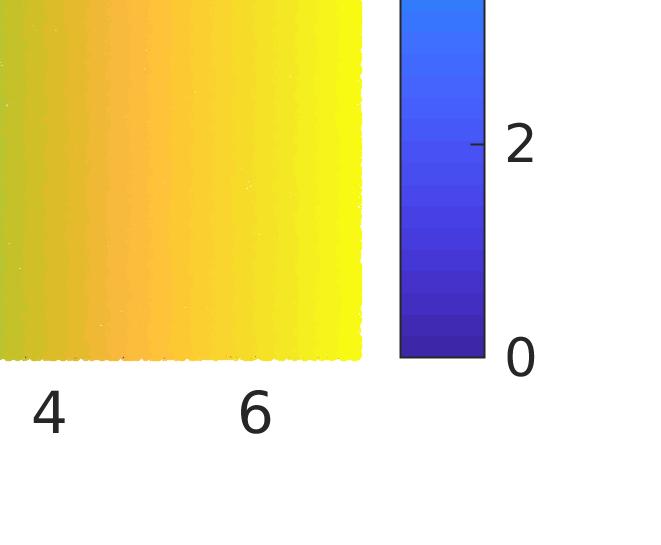
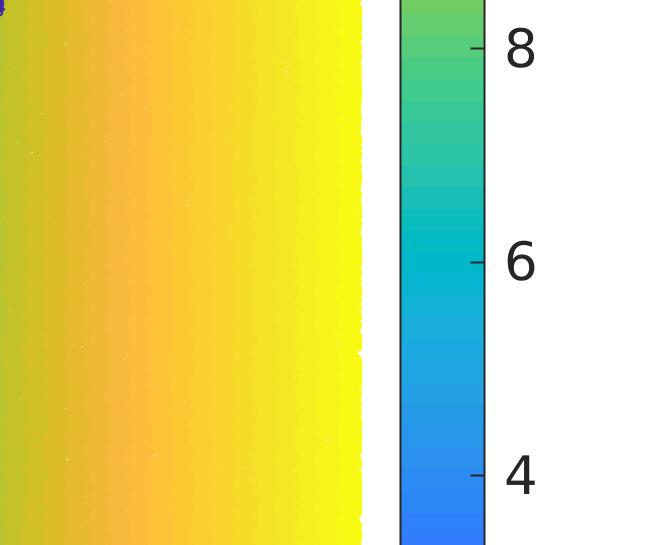
23 Inventory Inventory Gaussian Process Regression Rectangular level sets for the standard error due to space filling design (Sobol QMC). Mixture design leads to lower standard error in the switching region Price Price Impact of design on posterior standard error. Left: Sobol QMC, Right: Mixture design Allows for sequential design (Gramacy and Ludkovski (2015), Ludkovski (2018) and Hu and Ludkovski (2016)). Aditya Maheshwari (UCSB) Simulation Methods for Stochastic Storage 16 / 24
24 Outline 1 Stochastic storage 2 Dynamic Emulation Algorithm 3 Numerical Illustrations 4 Conclusion Aditya Maheshwari (UCSB) Simulation Methods for Stochastic Storage 17 / 24
25 Example1: Gas Storage Regression Simulation Budget Design Scheme Low Medium Large Conventional PR-1D 4,965 5,097 5,231 GP-1D 4,968 5,107 5,247 Adaptive 1D PR-1D 5,061 5,187 5,246 GP-1D 5,079 5,195 5,245 Dynamic GP-1D 5,132 5,225 5,266 Mixed 5,137 5,205 5,228 Mixture 2D PR-2D 4,820 4,835 4,834 GP-2D 5,137 5,210 5,233 Valuation ˆV (0, 6, 1000) (in thousands) using different design-regression pairs and three simulation budgets: Low N 10K, Medium N 40K, Large N 100K. PR: Polynomial regression, GP: Gaussian process Dynamic design: Varying budget, particularly higher simulation budget at the boundary due to penalty. Dynamic design + Mixed Regression: Varying budget and regression scheme as we move through the backward induction. Mixture design: 60% probabilistic and 40% space filling design. Higher valuation with mixture and dynamic design compared to conventional methods. Aditya Maheshwari (UCSB) Simulation Methods for Stochastic Storage 18 / 24
26 Valuation Example2: Double Gas Storage Jointly estimate the valuation of two independent gas storage facilities. State space (P t, I 1 t, I 2 t ), where I j t is the inventory for j th facility K 40K 67K 100K Sobol PR-3D Mixture PR-3D Conventional PR-1D Mixture GP-3D Space Filling design < Conventional design < Mixture design. Gaussian process better than the state-of-the-art 1D regressions. Parametric 1D regressions significantly outperform parametric -3D irrespective of the design. Aditya Maheshwari (UCSB) Simulation Methods for Stochastic Storage 19 / 24
27 Valuation Example3: Microgrid Conventional Space-filling Mixture PR-1D GP-1D GP-2D Poor performance of space filling designs across regression methods, GP more robust than the state-of-art. GP-2D with mixture design substantially better than Parametric -1D. Aditya Maheshwari (UCSB) Simulation Methods for Stochastic Storage 20 / 24
28 Conclusion So far... We developed a new Dynamic Emulation Algorithm: Scalable (very low memory requirement). Flexible (vary budget/regression/design distribution across time-steps). Fully controlled processes can be handled with ease (work in progress) Non-parametric regression methods for learning the value function. Emphasis on smart design through several examples exhibiting dynamic, exploratory and exploitative aspects of the algorithm. See for Microgrid example and other details. Aditya Maheshwari (UCSB) Simulation Methods for Stochastic Storage 21 / 24
29 Conclusion So far... We developed a new Dynamic Emulation Algorithm: Scalable (very low memory requirement). Flexible (vary budget/regression/design distribution across time-steps). Fully controlled processes can be handled with ease (work in progress) Non-parametric regression methods for learning the value function. Emphasis on smart design through several examples exhibiting dynamic, exploratory and exploitative aspects of the algorithm. See for Microgrid example and other details. DEA = Aditya Maheshwari (UCSB) Simulation Methods for Stochastic Storage 21 / 24
30 Conclusion So far... We developed a new Dynamic Emulation Algorithm: Scalable (very low memory requirement). Flexible (vary budget/regression/design distribution across time-steps). Fully controlled processes can be handled with ease (work in progress) Non-parametric regression methods for learning the value function. Emphasis on smart design through several examples exhibiting dynamic, exploratory and exploitative aspects of the algorithm. See for Microgrid example and other details. DEA = Modular template + Smart Design + Smart Regression Aditya Maheshwari (UCSB) Simulation Methods for Stochastic Storage 21 / 24
31 Conclusion So far... We developed a new Dynamic Emulation Algorithm: Scalable (very low memory requirement). Flexible (vary budget/regression/design distribution across time-steps). Fully controlled processes can be handled with ease (work in progress) Non-parametric regression methods for learning the value function. Emphasis on smart design through several examples exhibiting dynamic, exploratory and exploitative aspects of the algorithm. See for Microgrid example and other details. DEA = Modular template + Smart Design + Smart Regression Work in progress We extend Dynamic Emulation Algorithm for stochastic optimal control with probabilistic constraints. Aditya Maheshwari (UCSB) Simulation Methods for Stochastic Storage 21 / 24
32 References Balata, A., Palczewski, J.: Regress-Later Monte Carlo for Optimal Inventory Control with applications in energy (2017) Heymann, B, Bonnans, J.F, Martison, P, Silva, F, Lanas, F, Jimenez, G: Continuous optimal control approaches to microgrid energy management (2015) Heymann, B, Bonnans, J.F, Silva, F, Jimenez, G: A Stochastic Continuous Time Model for Microgrid Energy Management (2016) Ludkovski, M. Kriging Metamodels and Experimental Design for Bermudan Option Pricing, Journal of Computational Finance (2018) Gevret, H., Langrené, N., Lelong, J., and Warin, X., and Maheshwari, A., Stochastic optimization library in c++ (2018). Aditya Maheshwari (UCSB) Simulation Methods for Stochastic Storage 22 / 24
33 Microgrid Management Net demand (Load - Renewables) as stochastic factor with dynamics X tk+1 X tk = α(x X tk ) t + σ W tk. Inventory variable: I tk+1 = I tk + a(c tk ) t = I tk + B tk t, I tk [0, I max ]. Control of diesel generator c tk (1) = X tk 1 {Xtk >0} + B max Imax It k t. Regime m tk+1 {Generator ON, Generator OFF}. Aditya Maheshwari (UCSB) Simulation Methods for Stochastic Storage 23 / 24
 as stochastic")
 t + σ W tk.")
 t = I tk + B tk t, I tk")
![[0, I max ].](/docs-images/96/127747712/images/34-4.jpg "Control of diesel generator c tk")


 I max I tk B min (c tk X tk )")
![B max ] One step profit π(c, X )](/docs-images/96/127747712/images/34-8.jpg ":= c γ S [C 2 1 {S<0} + C 1 1")

34 Microgrid Management Net demand (Load - Renewables) as stochastic factor with dynamics X tk+1 X tk = α(x X tk ) t + σ W tk. Inventory variable: I tk+1 = I tk + a(c tk ) t = I tk + B tk t, I tk [0, I max ]. Control of diesel generator c tk (1) = X tk 1 {Xtk >0} + B max Imax It k t. Regime m tk+1 {Generator ON, Generator OFF}. Battery B tk := a(c tk ) = It k t ( ) I max I tk B min (c tk X tk ) B max ] One step profit π(c, X ) := c γ S [C 2 1 {S<0} + C 1 1 {S>0}, where S tk = c tk X tk B tk. S tk < 0 leads to blackout; S tk > 0 waste of energy. t. Aditya Maheshwari (UCSB) Simulation Methods for Stochastic Storage 23 / 24
35 Example1: Gas Storage Regression Simulation Budget Design Scheme Low Medium Large PR-1D 4,965 5,097 5,231 Conventional GP-1D 4,968 5,107 5,247 PR-2D 4,869 4,888 4,891 LOESS-2D 4,910 4,969 5,011 GP-2D 4,652 5,161 5,243 PR-1D 4,768 4,889 5,028 GP-1D 4,854 5,064 5,224 Space-filling PR-2D 4,762 4,789 4,792 LOESS-2D 4,747 4,912 4,934 GP-2D 4,976 5,080 5,133 Adaptive 1D PR-1D 5,061 5,187 5,246 GP-1D 5,079 5,195 5,245 Dynamic GP-1D 5,132 5,225 5,266 Mixed 5,137 5,205 5,228 PR-2D 4,820 4,835 4,834 Mixture 2D LOESS-2D 4,960 4,987 5,003 GP-2D 5,137 5,210 5,233 Valuation ˆV (0, 6, 1000) (in thousands) using different design-regression pairs and three simulation budgets: Low N 10K, Medium N 40K, Large N 100K. The valuations are averages across 10 runs of each scheme except for LOESS-2D with large budget: due to the excessive overhead of LOESS only a single run was carried out. Aditya Maheshwari (UCSB) Simulation Methods for Stochastic Storage 24 / 24
Energy Management Systems and Demand Response
 Energy Management Systems and Demand Response W. van Ackooij, A. P. Chorobura, C. Sagastizábal, H. Zidani PGMO Days 2017 November 14, 2017 (PGMO) November 14, 2017 1 / 24 Goals For a toy power mix problem,
Energy Management Systems and Demand Response W. van Ackooij, A. P. Chorobura, C. Sagastizábal, H. Zidani PGMO Days 2017 November 14, 2017 (PGMO) November 14, 2017 1 / 24 Goals For a toy power mix problem,
The Real Option Approach to Plant Valuation: from Spread Options to Optimal Switching
 The Real Option Approach to Plant Valuation: from Spread Options to René 1 and Michael Ludkovski 2 1 Bendheim Center for Finance Department of Operations Research & Financial Engineering Princeton University
The Real Option Approach to Plant Valuation: from Spread Options to René 1 and Michael Ludkovski 2 1 Bendheim Center for Finance Department of Operations Research & Financial Engineering Princeton University
Model-Based Reinforcement Learning with Continuous States and Actions
 Marc P. Deisenroth, Carl E. Rasmussen, and Jan Peters: Model-Based Reinforcement Learning with Continuous States and Actions in Proceedings of the 16th European Symposium on Artificial Neural Networks
Marc P. Deisenroth, Carl E. Rasmussen, and Jan Peters: Model-Based Reinforcement Learning with Continuous States and Actions in Proceedings of the 16th European Symposium on Artificial Neural Networks
Gaussian Processes (10/16/13)
") STA561: Probabilistic machine learning Gaussian Processes (10/16/13) Lecturer: Barbara Engelhardt Scribes: Changwei Hu, Di Jin, Mengdi Wang 1 Introduction In supervised learning, we observe some inputs
STA561: Probabilistic machine learning Gaussian Processes (10/16/13) Lecturer: Barbara Engelhardt Scribes: Changwei Hu, Di Jin, Mengdi Wang 1 Introduction In supervised learning, we observe some inputs
Approximate dynamic programming for stochastic reachability
 Approximate dynamic programming for stochastic reachability Nikolaos Kariotoglou, Sean Summers, Tyler Summers, Maryam Kamgarpour and John Lygeros Abstract In this work we illustrate how approximate dynamic
Approximate dynamic programming for stochastic reachability Nikolaos Kariotoglou, Sean Summers, Tyler Summers, Maryam Kamgarpour and John Lygeros Abstract In this work we illustrate how approximate dynamic
Lecture 6: Bayesian Inference in SDE Models
 Lecture 6: Bayesian Inference in SDE Models Bayesian Filtering and Smoothing Point of View Simo Särkkä Aalto University Simo Särkkä (Aalto) Lecture 6: Bayesian Inference in SDEs 1 / 45 Contents 1 SDEs
Lecture 6: Bayesian Inference in SDE Models Bayesian Filtering and Smoothing Point of View Simo Särkkä Aalto University Simo Särkkä (Aalto) Lecture 6: Bayesian Inference in SDEs 1 / 45 Contents 1 SDEs
Bayesian Active Learning With Basis Functions
 Bayesian Active Learning With Basis Functions Ilya O. Ryzhov Warren B. Powell Operations Research and Financial Engineering Princeton University Princeton, NJ 08544, USA IEEE ADPRL April 13, 2011 1 / 29
Bayesian Active Learning With Basis Functions Ilya O. Ryzhov Warren B. Powell Operations Research and Financial Engineering Princeton University Princeton, NJ 08544, USA IEEE ADPRL April 13, 2011 1 / 29
Optimization Tools in an Uncertain Environment
 Optimization Tools in an Uncertain Environment Michael C. Ferris University of Wisconsin, Madison Uncertainty Workshop, Chicago: July 21, 2008 Michael Ferris (University of Wisconsin) Stochastic optimization
Optimization Tools in an Uncertain Environment Michael C. Ferris University of Wisconsin, Madison Uncertainty Workshop, Chicago: July 21, 2008 Michael Ferris (University of Wisconsin) Stochastic optimization
Global Focus on Knowledge Lecture Series. Finance and Math. Practical Problems of Finance and Integral Computations of Higher Dimensions
 Global Focus on Knowledge Lecture Series Finance and Math The 9 th Lecture Practical Problems of Finance and Integral Computations of Higher Dimensions How to Compute Integration Math Application New Mathematiques
Global Focus on Knowledge Lecture Series Finance and Math The 9 th Lecture Practical Problems of Finance and Integral Computations of Higher Dimensions How to Compute Integration Math Application New Mathematiques
Design and Analysis of Simulation Experiments
 Jack P.C. Kleijnen Design and Analysis of Simulation Experiments Second Edition ~Springer Contents Preface vii 1 Introduction 1 1.1 What Is Simulation? 1 1.2 What Is "Design and Analysis of Simulation
Jack P.C. Kleijnen Design and Analysis of Simulation Experiments Second Edition ~Springer Contents Preface vii 1 Introduction 1 1.1 What Is Simulation? 1 1.2 What Is "Design and Analysis of Simulation
Nonparametric Bayesian Methods (Gaussian Processes)
") [70240413 Statistical Machine Learning, Spring, 2015] Nonparametric Bayesian Methods (Gaussian Processes) Jun Zhu dcszj@mail.tsinghua.edu.cn http://bigml.cs.tsinghua.edu.cn/~jun State Key Lab of Intelligent
[70240413 Statistical Machine Learning, Spring, 2015] Nonparametric Bayesian Methods (Gaussian Processes) Jun Zhu dcszj@mail.tsinghua.edu.cn http://bigml.cs.tsinghua.edu.cn/~jun State Key Lab of Intelligent
Course 16:198:520: Introduction To Artificial Intelligence Lecture 13. Decision Making. Abdeslam Boularias. Wednesday, December 7, 2016
 Course 16:198:520: Introduction To Artificial Intelligence Lecture 13 Decision Making Abdeslam Boularias Wednesday, December 7, 2016 1 / 45 Overview We consider probabilistic temporal models where the
Course 16:198:520: Introduction To Artificial Intelligence Lecture 13 Decision Making Abdeslam Boularias Wednesday, December 7, 2016 1 / 45 Overview We consider probabilistic temporal models where the
STAT 518 Intro Student Presentation
 STAT 518 Intro Student Presentation Wen Wei Loh April 11, 2013 Title of paper Radford M. Neal [1999] Bayesian Statistics, 6: 475-501, 1999 What the paper is about Regression and Classification Flexible
STAT 518 Intro Student Presentation Wen Wei Loh April 11, 2013 Title of paper Radford M. Neal [1999] Bayesian Statistics, 6: 475-501, 1999 What the paper is about Regression and Classification Flexible
STA414/2104. Lecture 11: Gaussian Processes. Department of Statistics
 STA414/2104 Lecture 11: Gaussian Processes Department of Statistics www.utstat.utoronto.ca Delivered by Mark Ebden with thanks to Russ Salakhutdinov Outline Gaussian Processes Exam review Course evaluations
STA414/2104 Lecture 11: Gaussian Processes Department of Statistics www.utstat.utoronto.ca Delivered by Mark Ebden with thanks to Russ Salakhutdinov Outline Gaussian Processes Exam review Course evaluations
Linear Dynamical Systems (Kalman filter)
") Linear Dynamical Systems (Kalman filter) (a) Overview of HMMs (b) From HMMs to Linear Dynamical Systems (LDS) 1 Markov Chains with Discrete Random Variables x 1 x 2 x 3 x T Let s assume we have discrete
Linear Dynamical Systems (Kalman filter) (a) Overview of HMMs (b) From HMMs to Linear Dynamical Systems (LDS) 1 Markov Chains with Discrete Random Variables x 1 x 2 x 3 x T Let s assume we have discrete
Optimal Demand Response
 Optimal Demand Response Libin Jiang Steven Low Computing + Math Sciences Electrical Engineering Caltech Oct 2011 Outline Caltech smart grid research Optimal demand response Global trends 1 Exploding renewables
Optimal Demand Response Libin Jiang Steven Low Computing + Math Sciences Electrical Engineering Caltech Oct 2011 Outline Caltech smart grid research Optimal demand response Global trends 1 Exploding renewables
A Bayesian Perspective on Residential Demand Response Using Smart Meter Data
 A Bayesian Perspective on Residential Demand Response Using Smart Meter Data Datong-Paul Zhou, Maximilian Balandat, and Claire Tomlin University of California, Berkeley [datong.zhou, balandat, tomlin]@eecs.berkeley.edu
A Bayesian Perspective on Residential Demand Response Using Smart Meter Data Datong-Paul Zhou, Maximilian Balandat, and Claire Tomlin University of California, Berkeley [datong.zhou, balandat, tomlin]@eecs.berkeley.edu
Probabilistic Reasoning in Deep Learning
 Probabilistic Reasoning in Deep Learning Dr Konstantina Palla, PhD palla@stats.ox.ac.uk September 2017 Deep Learning Indaba, Johannesburgh Konstantina Palla 1 / 39 OVERVIEW OF THE TALK Basics of Bayesian
Probabilistic Reasoning in Deep Learning Dr Konstantina Palla, PhD palla@stats.ox.ac.uk September 2017 Deep Learning Indaba, Johannesburgh Konstantina Palla 1 / 39 OVERVIEW OF THE TALK Basics of Bayesian
R O B U S T E N E R G Y M AN AG E M E N T S Y S T E M F O R I S O L AT E D M I C R O G R I D S
 ROBUST ENERGY MANAGEMENT SYSTEM FOR ISOLATED MICROGRIDS Jose Daniel La r a Claudio Cañizares Ka nka r Bhattacharya D e p a r t m e n t o f E l e c t r i c a l a n d C o m p u t e r E n g i n e e r i n
ROBUST ENERGY MANAGEMENT SYSTEM FOR ISOLATED MICROGRIDS Jose Daniel La r a Claudio Cañizares Ka nka r Bhattacharya D e p a r t m e n t o f E l e c t r i c a l a n d C o m p u t e r E n g i n e e r i n
Train the model with a subset of the data. Test the model on the remaining data (the validation set) What data to choose for training vs. test?
 What data to choose for training vs. test?") Train the model with a subset of the data Test the model on the remaining data (the validation set) What data to choose for training vs. test? In a time-series dimension, it is natural to hold out the
Train the model with a subset of the data Test the model on the remaining data (the validation set) What data to choose for training vs. test? In a time-series dimension, it is natural to hold out the
Submodularity in Machine Learning
 Saifuddin Syed MLRG Summer 2016 1 / 39 What are submodular functions Outline 1 What are submodular functions Motivation Submodularity and Concavity Examples 2 Properties of submodular functions Submodularity
Saifuddin Syed MLRG Summer 2016 1 / 39 What are submodular functions Outline 1 What are submodular functions Motivation Submodularity and Concavity Examples 2 Properties of submodular functions Submodularity
Lecture 2: From Linear Regression to Kalman Filter and Beyond
 Lecture 2: From Linear Regression to Kalman Filter and Beyond January 18, 2017 Contents 1 Batch and Recursive Estimation 2 Towards Bayesian Filtering 3 Kalman Filter and Bayesian Filtering and Smoothing
Lecture 2: From Linear Regression to Kalman Filter and Beyond January 18, 2017 Contents 1 Batch and Recursive Estimation 2 Towards Bayesian Filtering 3 Kalman Filter and Bayesian Filtering and Smoothing
Monitoring Wafer Geometric Quality using Additive Gaussian Process
 Monitoring Wafer Geometric Quality using Additive Gaussian Process Linmiao Zhang 1 Kaibo Wang 2 Nan Chen 1 1 Department of Industrial and Systems Engineering, National University of Singapore 2 Department
Monitoring Wafer Geometric Quality using Additive Gaussian Process Linmiao Zhang 1 Kaibo Wang 2 Nan Chen 1 1 Department of Industrial and Systems Engineering, National University of Singapore 2 Department
Stochastic Unit Commitment with Topology Control Recourse for Renewables Integration
 1 Stochastic Unit Commitment with Topology Control Recourse for Renewables Integration Jiaying Shi and Shmuel Oren University of California, Berkeley IPAM, January 2016 33% RPS - Cumulative expected VERs
1 Stochastic Unit Commitment with Topology Control Recourse for Renewables Integration Jiaying Shi and Shmuel Oren University of California, Berkeley IPAM, January 2016 33% RPS - Cumulative expected VERs
Multi-armed bandit models: a tutorial
 Multi-armed bandit models: a tutorial CERMICS seminar, March 30th, 2016 Multi-Armed Bandit model: general setting K arms: for a {1,..., K}, (X a,t ) t N is a stochastic process. (unknown distributions)
Multi-armed bandit models: a tutorial CERMICS seminar, March 30th, 2016 Multi-Armed Bandit model: general setting K arms: for a {1,..., K}, (X a,t ) t N is a stochastic process. (unknown distributions)
Better Simulation Metamodeling: The Why, What and How of Stochastic Kriging
 Better Simulation Metamodeling: The Why, What and How of Stochastic Kriging Jeremy Staum Collaborators: Bruce Ankenman, Barry Nelson Evren Baysal, Ming Liu, Wei Xie supported by the NSF under Grant No.
Better Simulation Metamodeling: The Why, What and How of Stochastic Kriging Jeremy Staum Collaborators: Bruce Ankenman, Barry Nelson Evren Baysal, Ming Liu, Wei Xie supported by the NSF under Grant No.
Lecture: Gaussian Process Regression. STAT 6474 Instructor: Hongxiao Zhu
 Lecture: Gaussian Process Regression STAT 6474 Instructor: Hongxiao Zhu Motivation Reference: Marc Deisenroth s tutorial on Robot Learning. 2 Fast Learning for Autonomous Robots with Gaussian Processes
Lecture: Gaussian Process Regression STAT 6474 Instructor: Hongxiao Zhu Motivation Reference: Marc Deisenroth s tutorial on Robot Learning. 2 Fast Learning for Autonomous Robots with Gaussian Processes
STATE ESTIMATION IN DISTRIBUTION SYSTEMS
 SAE ESIMAION IN DISRIBUION SYSEMS 2015 CIGRE Grid of the Future Symposium Chicago (IL), October 13, 2015 L. Garcia-Garcia, D. Apostolopoulou Laura.GarciaGarcia@ComEd.com Dimitra.Apostolopoulou@ComEd.com
SAE ESIMAION IN DISRIBUION SYSEMS 2015 CIGRE Grid of the Future Symposium Chicago (IL), October 13, 2015 L. Garcia-Garcia, D. Apostolopoulou Laura.GarciaGarcia@ComEd.com Dimitra.Apostolopoulou@ComEd.com
Practical Bayesian Optimization of Machine Learning. Learning Algorithms
 Practical Bayesian Optimization of Machine Learning Algorithms CS 294 University of California, Berkeley Tuesday, April 20, 2016 Motivation Machine Learning Algorithms (MLA s) have hyperparameters that
Practical Bayesian Optimization of Machine Learning Algorithms CS 294 University of California, Berkeley Tuesday, April 20, 2016 Motivation Machine Learning Algorithms (MLA s) have hyperparameters that
Gaussian Processes for Computer Experiments
 Gaussian Processes for Computer Experiments Jeremy Oakley School of Mathematics and Statistics, University of Sheffield www.jeremy-oakley.staff.shef.ac.uk 1 / 43 Computer models Computer model represented
Gaussian Processes for Computer Experiments Jeremy Oakley School of Mathematics and Statistics, University of Sheffield www.jeremy-oakley.staff.shef.ac.uk 1 / 43 Computer models Computer model represented
Overfitting, Bias / Variance Analysis
 Overfitting, Bias / Variance Analysis Professor Ameet Talwalkar Professor Ameet Talwalkar CS260 Machine Learning Algorithms February 8, 207 / 40 Outline Administration 2 Review of last lecture 3 Basic
Overfitting, Bias / Variance Analysis Professor Ameet Talwalkar Professor Ameet Talwalkar CS260 Machine Learning Algorithms February 8, 207 / 40 Outline Administration 2 Review of last lecture 3 Basic
ICML Scalable Bayesian Inference on Point processes. with Gaussian Processes. Yves-Laurent Kom Samo & Stephen Roberts
 ICML 2015 Scalable Nonparametric Bayesian Inference on Point Processes with Gaussian Processes Machine Learning Research Group and Oxford-Man Institute University of Oxford July 8, 2015 Point Processes
ICML 2015 Scalable Nonparametric Bayesian Inference on Point Processes with Gaussian Processes Machine Learning Research Group and Oxford-Man Institute University of Oxford July 8, 2015 Point Processes
Liquidation in Limit Order Books. LOBs with Controlled Intensity
 Limit Order Book Model Power-Law Intensity Law Exponential Decay Order Books Extensions Liquidation in Limit Order Books with Controlled Intensity Erhan and Mike Ludkovski University of Michigan and UCSB
Limit Order Book Model Power-Law Intensity Law Exponential Decay Order Books Extensions Liquidation in Limit Order Books with Controlled Intensity Erhan and Mike Ludkovski University of Michigan and UCSB
Polynomial chaos expansions for sensitivity analysis
 c DEPARTMENT OF CIVIL, ENVIRONMENTAL AND GEOMATIC ENGINEERING CHAIR OF RISK, SAFETY & UNCERTAINTY QUANTIFICATION Polynomial chaos expansions for sensitivity analysis B. Sudret Chair of Risk, Safety & Uncertainty
c DEPARTMENT OF CIVIL, ENVIRONMENTAL AND GEOMATIC ENGINEERING CHAIR OF RISK, SAFETY & UNCERTAINTY QUANTIFICATION Polynomial chaos expansions for sensitivity analysis B. Sudret Chair of Risk, Safety & Uncertainty
Robust Building Energy Load Forecasting Using Physically-Based Kernel Models
 Article Robust Building Energy Load Forecasting Using Physically-Based Kernel Models Anand Krishnan Prakash 1, Susu Xu 2, *,, Ram Rajagopal 3 and Hae Young Noh 2 1 Energy Science, Technology and Policy,
Article Robust Building Energy Load Forecasting Using Physically-Based Kernel Models Anand Krishnan Prakash 1, Susu Xu 2, *,, Ram Rajagopal 3 and Hae Young Noh 2 1 Energy Science, Technology and Policy,
Basics of reinforcement learning
 Basics of reinforcement learning Lucian Buşoniu TMLSS, 20 July 2018 Main idea of reinforcement learning (RL) Learn a sequential decision policy to optimize the cumulative performance of an unknown system
Basics of reinforcement learning Lucian Buşoniu TMLSS, 20 July 2018 Main idea of reinforcement learning (RL) Learn a sequential decision policy to optimize the cumulative performance of an unknown system
PATTERN RECOGNITION AND MACHINE LEARNING CHAPTER 13: SEQUENTIAL DATA
 PATTERN RECOGNITION AND MACHINE LEARNING CHAPTER 13: SEQUENTIAL DATA Contents in latter part Linear Dynamical Systems What is different from HMM? Kalman filter Its strength and limitation Particle Filter
PATTERN RECOGNITION AND MACHINE LEARNING CHAPTER 13: SEQUENTIAL DATA Contents in latter part Linear Dynamical Systems What is different from HMM? Kalman filter Its strength and limitation Particle Filter
Benefits of Storage Control for Wind Power Producers in Power Markets
 Benefits of Storage Control for Wind Power Producers in Power Markets Mainak Chowdhury, Student Member, IEEE, Milind Rao, Student Member, IEEE, Yue Zhao, Member, IEEE, Tara Javidi, Senior Member, IEEE
Benefits of Storage Control for Wind Power Producers in Power Markets Mainak Chowdhury, Student Member, IEEE, Milind Rao, Student Member, IEEE, Yue Zhao, Member, IEEE, Tara Javidi, Senior Member, IEEE
Conditional Simulation of Random Fields by Successive Residuals 1
 Mathematical Geology, Vol 34, No 5, July 2002 ( C 2002) Conditional Simulation of Random Fields by Successive Residuals 1 J A Vargas-Guzmán 2,3 and R Dimitrakopoulos 2 This paper presents a new approach
Mathematical Geology, Vol 34, No 5, July 2002 ( C 2002) Conditional Simulation of Random Fields by Successive Residuals 1 J A Vargas-Guzmán 2,3 and R Dimitrakopoulos 2 This paper presents a new approach
Reinforcement learning
 Reinforcement learning Based on [Kaelbling et al., 1996, Bertsekas, 2000] Bert Kappen Reinforcement learning Reinforcement learning is the problem faced by an agent that must learn behavior through trial-and-error
Reinforcement learning Based on [Kaelbling et al., 1996, Bertsekas, 2000] Bert Kappen Reinforcement learning Reinforcement learning is the problem faced by an agent that must learn behavior through trial-and-error
Neutron inverse kinetics via Gaussian Processes
 Neutron inverse kinetics via Gaussian Processes P. Picca Politecnico di Torino, Torino, Italy R. Furfaro University of Arizona, Tucson, Arizona Outline Introduction Review of inverse kinetics techniques
Neutron inverse kinetics via Gaussian Processes P. Picca Politecnico di Torino, Torino, Italy R. Furfaro University of Arizona, Tucson, Arizona Outline Introduction Review of inverse kinetics techniques
Introduction to emulators - the what, the when, the why
 School of Earth and Environment INSTITUTE FOR CLIMATE & ATMOSPHERIC SCIENCE Introduction to emulators - the what, the when, the why Dr Lindsay Lee 1 What is a simulator? A simulator is a computer code
School of Earth and Environment INSTITUTE FOR CLIMATE & ATMOSPHERIC SCIENCE Introduction to emulators - the what, the when, the why Dr Lindsay Lee 1 What is a simulator? A simulator is a computer code
Distributionally Robust Stochastic Optimization with Wasserstein Distance
 Distributionally Robust Stochastic Optimization with Wasserstein Distance Rui Gao DOS Seminar, Oct 2016 Joint work with Anton Kleywegt School of Industrial and Systems Engineering Georgia Tech What is
Distributionally Robust Stochastic Optimization with Wasserstein Distance Rui Gao DOS Seminar, Oct 2016 Joint work with Anton Kleywegt School of Industrial and Systems Engineering Georgia Tech What is
Gaussian Processes as Continuous-time Trajectory Representations: Applications in SLAM and Motion Planning
 Gaussian Processes as Continuous-time Trajectory Representations: Applications in SLAM and Motion Planning Jing Dong jdong@gatech.edu 2017-06-20 License CC BY-NC-SA 3.0 Discrete time SLAM Downsides: Measurements
Gaussian Processes as Continuous-time Trajectory Representations: Applications in SLAM and Motion Planning Jing Dong jdong@gatech.edu 2017-06-20 License CC BY-NC-SA 3.0 Discrete time SLAM Downsides: Measurements
Statistical Perspectives on Geographic Information Science. Michael F. Goodchild University of California Santa Barbara
 Statistical Perspectives on Geographic Information Science Michael F. Goodchild University of California Santa Barbara Statistical geometry Geometric phenomena subject to chance spatial phenomena emphasis
Statistical Perspectives on Geographic Information Science Michael F. Goodchild University of California Santa Barbara Statistical geometry Geometric phenomena subject to chance spatial phenomena emphasis
High-dimensional Problems in Finance and Economics. Thomas M. Mertens
 High-dimensional Problems in Finance and Economics Thomas M. Mertens NYU Stern Risk Economics Lab April 17, 2012 1 / 78 Motivation Many problems in finance and economics are high dimensional. Dynamic Optimization:
High-dimensional Problems in Finance and Economics Thomas M. Mertens NYU Stern Risk Economics Lab April 17, 2012 1 / 78 Motivation Many problems in finance and economics are high dimensional. Dynamic Optimization:
On Bayesian Computation
 On Bayesian Computation Michael I. Jordan with Elaine Angelino, Maxim Rabinovich, Martin Wainwright and Yun Yang Previous Work: Information Constraints on Inference Minimize the minimax risk under constraints
On Bayesian Computation Michael I. Jordan with Elaine Angelino, Maxim Rabinovich, Martin Wainwright and Yun Yang Previous Work: Information Constraints on Inference Minimize the minimax risk under constraints
Bayesian Dynamic Linear Modelling for. Complex Computer Models
 Bayesian Dynamic Linear Modelling for Complex Computer Models Fei Liu, Liang Zhang, Mike West Abstract Computer models may have functional outputs. With no loss of generality, we assume that a single computer
Bayesian Dynamic Linear Modelling for Complex Computer Models Fei Liu, Liang Zhang, Mike West Abstract Computer models may have functional outputs. With no loss of generality, we assume that a single computer
Optimization Methods in Management Science
 Problem Set Rules: Optimization Methods in Management Science MIT 15.053, Spring 2013 Problem Set 1 (First Group of Students) Students with first letter of surnames A F Due: February 12, 2013 1. Each student
Problem Set Rules: Optimization Methods in Management Science MIT 15.053, Spring 2013 Problem Set 1 (First Group of Students) Students with first letter of surnames A F Due: February 12, 2013 1. Each student
High-dimensional Markov Chain Models for Categorical Data Sequences with Applications Wai-Ki CHING AMACL, Department of Mathematics HKU 19 March 2013
 High-dimensional Markov Chain Models for Categorical Data Sequences with Applications Wai-Ki CHING AMACL, Department of Mathematics HKU 19 March 2013 Abstract: Markov chains are popular models for a modelling
High-dimensional Markov Chain Models for Categorical Data Sequences with Applications Wai-Ki CHING AMACL, Department of Mathematics HKU 19 March 2013 Abstract: Markov chains are popular models for a modelling
Coupled Optimization Models for Planning and Operation of Power Systems on Multiple Scales
 Coupled Optimization Models for Planning and Operation of Power Systems on Multiple Scales Michael C. Ferris University of Wisconsin, Madison Computational Needs for the Next Generation Electric Grid,
Coupled Optimization Models for Planning and Operation of Power Systems on Multiple Scales Michael C. Ferris University of Wisconsin, Madison Computational Needs for the Next Generation Electric Grid,
Introduction to Machine Learning
 Introduction to Machine Learning Linear Regression Varun Chandola Computer Science & Engineering State University of New York at Buffalo Buffalo, NY, USA chandola@buffalo.edu Chandola@UB CSE 474/574 1
Introduction to Machine Learning Linear Regression Varun Chandola Computer Science & Engineering State University of New York at Buffalo Buffalo, NY, USA chandola@buffalo.edu Chandola@UB CSE 474/574 1
Curve Fitting Re-visited, Bishop1.2.5
 Curve Fitting Re-visited, Bishop1.2.5 Maximum Likelihood Bishop 1.2.5 Model Likelihood differentiation p(t x, w, β) = Maximum Likelihood N N ( t n y(x n, w), β 1). (1.61) n=1 As we did in the case of the
Curve Fitting Re-visited, Bishop1.2.5 Maximum Likelihood Bishop 1.2.5 Model Likelihood differentiation p(t x, w, β) = Maximum Likelihood N N ( t n y(x n, w), β 1). (1.61) n=1 As we did in the case of the
Real-Time Demand Response with Uncertain Renewable Energy in Smart Grid
 Forty-Ninth Annual Allerton Conference Allerton House, UIUC, Illinois, USA September 28-3, 211 Real-Time Demand Response with Uncertain Renewable Energy in Smart Grid Libin Jiang and Steven Low Engineering
Forty-Ninth Annual Allerton Conference Allerton House, UIUC, Illinois, USA September 28-3, 211 Real-Time Demand Response with Uncertain Renewable Energy in Smart Grid Libin Jiang and Steven Low Engineering
Uncertainty in energy system models
 Uncertainty in energy system models Amy Wilson Durham University May 2015 Table of Contents 1 Model uncertainty 2 3 Example - generation investment 4 Conclusion Model uncertainty Contents 1 Model uncertainty
Uncertainty in energy system models Amy Wilson Durham University May 2015 Table of Contents 1 Model uncertainty 2 3 Example - generation investment 4 Conclusion Model uncertainty Contents 1 Model uncertainty
Gaussian Processes for Machine Learning
 Gaussian Processes for Machine Learning Carl Edward Rasmussen Max Planck Institute for Biological Cybernetics Tübingen, Germany carl@tuebingen.mpg.de Carlos III, Madrid, May 2006 The actual science of
Gaussian Processes for Machine Learning Carl Edward Rasmussen Max Planck Institute for Biological Cybernetics Tübingen, Germany carl@tuebingen.mpg.de Carlos III, Madrid, May 2006 The actual science of
Dynamic Risk Measures and Nonlinear Expectations with Markov Chain noise
 Dynamic Risk Measures and Nonlinear Expectations with Markov Chain noise Robert J. Elliott 1 Samuel N. Cohen 2 1 Department of Commerce, University of South Australia 2 Mathematical Insitute, University
Dynamic Risk Measures and Nonlinear Expectations with Markov Chain noise Robert J. Elliott 1 Samuel N. Cohen 2 1 Department of Commerce, University of South Australia 2 Mathematical Insitute, University
Estimating Optimal Dynamic Treatment Regimes from Clustered Data
 Estimating Optimal Dynamic Treatment Regimes from Clustered Data Bibhas Chakraborty Department of Biostatistics, Columbia University bc2425@columbia.edu Society for Clinical Trials Annual Meetings Boston,
Estimating Optimal Dynamic Treatment Regimes from Clustered Data Bibhas Chakraborty Department of Biostatistics, Columbia University bc2425@columbia.edu Society for Clinical Trials Annual Meetings Boston,
Risk Assessment for CO 2 Sequestration- Uncertainty Quantification based on Surrogate Models of Detailed Simulations
 Risk Assessment for CO 2 Sequestration- Uncertainty Quantification based on Surrogate Models of Detailed Simulations Yan Zhang Advisor: Nick Sahinidis Department of Chemical Engineering Carnegie Mellon
Risk Assessment for CO 2 Sequestration- Uncertainty Quantification based on Surrogate Models of Detailed Simulations Yan Zhang Advisor: Nick Sahinidis Department of Chemical Engineering Carnegie Mellon
A Computational Method for Multidimensional Continuous-choice. Dynamic Problems
 A Computational Method for Multidimensional Continuous-choice Dynamic Problems (Preliminary) Xiaolu Zhou School of Economics & Wangyannan Institution for Studies in Economics Xiamen University April 9,
A Computational Method for Multidimensional Continuous-choice Dynamic Problems (Preliminary) Xiaolu Zhou School of Economics & Wangyannan Institution for Studies in Economics Xiamen University April 9,
The classifier. Theorem. where the min is over all possible classifiers. To calculate the Bayes classifier/bayes risk, we need to know
 The Bayes classifier Theorem The classifier satisfies where the min is over all possible classifiers. To calculate the Bayes classifier/bayes risk, we need to know Alternatively, since the maximum it is
The Bayes classifier Theorem The classifier satisfies where the min is over all possible classifiers. To calculate the Bayes classifier/bayes risk, we need to know Alternatively, since the maximum it is
The classifier. Linear discriminant analysis (LDA) Example. Challenges for LDA
 Example. Challenges for LDA") The Bayes classifier Linear discriminant analysis (LDA) Theorem The classifier satisfies In linear discriminant analysis (LDA), we make the (strong) assumption that where the min is over all possible classifiers.
The Bayes classifier Linear discriminant analysis (LDA) Theorem The classifier satisfies In linear discriminant analysis (LDA), we make the (strong) assumption that where the min is over all possible classifiers.
Forecasting Data Streams: Next Generation Flow Field Forecasting
 Forecasting Data Streams: Next Generation Flow Field Forecasting Kyle Caudle South Dakota School of Mines & Technology (SDSMT) kyle.caudle@sdsmt.edu Joint work with Michael Frey (Bucknell University) and
Forecasting Data Streams: Next Generation Flow Field Forecasting Kyle Caudle South Dakota School of Mines & Technology (SDSMT) kyle.caudle@sdsmt.edu Joint work with Michael Frey (Bucknell University) and
Firming Renewable Power with Demand Response: An End-to-end Aggregator Business Model
 Firming Renewable Power with Demand Response: An End-to-end Aggregator Business Model Clay Campaigne joint work with Shmuel Oren November 5, 2015 1 / 16 Motivation Problem: Expansion of renewables increases
Firming Renewable Power with Demand Response: An End-to-end Aggregator Business Model Clay Campaigne joint work with Shmuel Oren November 5, 2015 1 / 16 Motivation Problem: Expansion of renewables increases
Sparse and Robust Optimization and Applications
 Sparse and and Statistical Learning Workshop Les Houches, 2013 Robust Laurent El Ghaoui with Mert Pilanci, Anh Pham EECS Dept., UC Berkeley January 7, 2013 1 / 36 Outline Sparse Sparse Sparse Probability
Sparse and and Statistical Learning Workshop Les Houches, 2013 Robust Laurent El Ghaoui with Mert Pilanci, Anh Pham EECS Dept., UC Berkeley January 7, 2013 1 / 36 Outline Sparse Sparse Sparse Probability
Dynamic Approaches: The Hidden Markov Model
 Dynamic Approaches: The Hidden Markov Model Davide Bacciu Dipartimento di Informatica Università di Pisa bacciu@di.unipi.it Machine Learning: Neural Networks and Advanced Models (AA2) Inference as Message
Dynamic Approaches: The Hidden Markov Model Davide Bacciu Dipartimento di Informatica Università di Pisa bacciu@di.unipi.it Machine Learning: Neural Networks and Advanced Models (AA2) Inference as Message
Introduction to Gaussian Process
 Introduction to Gaussian Process CS 778 Chris Tensmeyer CS 478 INTRODUCTION 1 What Topic? Machine Learning Regression Bayesian ML Bayesian Regression Bayesian Non-parametric Gaussian Process (GP) GP Regression
Introduction to Gaussian Process CS 778 Chris Tensmeyer CS 478 INTRODUCTION 1 What Topic? Machine Learning Regression Bayesian ML Bayesian Regression Bayesian Non-parametric Gaussian Process (GP) GP Regression
Numerical Methods with Lévy Processes
 Numerical Methods with Lévy Processes 1 Objective: i) Find models of asset returns, etc ii) Get numbers out of them. Why? VaR and risk management Valuing and hedging derivatives Why not? Usual assumption:
Numerical Methods with Lévy Processes 1 Objective: i) Find models of asset returns, etc ii) Get numbers out of them. Why? VaR and risk management Valuing and hedging derivatives Why not? Usual assumption:
Reliability Monitoring Using Log Gaussian Process Regression
 COPYRIGHT 013, M. Modarres Reliability Monitoring Using Log Gaussian Process Regression Martin Wayne Mohammad Modarres PSA 013 Center for Risk and Reliability University of Maryland Department of Mechanical
COPYRIGHT 013, M. Modarres Reliability Monitoring Using Log Gaussian Process Regression Martin Wayne Mohammad Modarres PSA 013 Center for Risk and Reliability University of Maryland Department of Mechanical
Incremental Latin Hypercube Sampling
 Incremental Latin Hypercube Sampling for Lifetime Stochastic Behavioral Modeling of Analog Circuits Yen-Lung Chen +, Wei Wu *, Chien-Nan Jimmy Liu + and Lei He * EE Dept., National Central University,
Incremental Latin Hypercube Sampling for Lifetime Stochastic Behavioral Modeling of Analog Circuits Yen-Lung Chen +, Wei Wu *, Chien-Nan Jimmy Liu + and Lei He * EE Dept., National Central University,
Today s Outline. Recap: MDPs. Bellman Equations. Q-Value Iteration. Bellman Backup 5/7/2012. CSE 473: Artificial Intelligence Reinforcement Learning
 CSE 473: Artificial Intelligence Reinforcement Learning Dan Weld Today s Outline Reinforcement Learning Q-value iteration Q-learning Exploration / exploitation Linear function approximation Many slides
CSE 473: Artificial Intelligence Reinforcement Learning Dan Weld Today s Outline Reinforcement Learning Q-value iteration Q-learning Exploration / exploitation Linear function approximation Many slides
Optimal Battery Aging : an Adaptive Weights Dynamic Programming Algorithm
 Optimal Battery Aging : an Adaptive Weights Dynamic Programming Algorithm Benjamin Heymann, Pierre Martinon To cite this version: Benjamin Heymann, Pierre Martinon. Optimal Battery Aging : an Adaptive
Optimal Battery Aging : an Adaptive Weights Dynamic Programming Algorithm Benjamin Heymann, Pierre Martinon To cite this version: Benjamin Heymann, Pierre Martinon. Optimal Battery Aging : an Adaptive
Gaussian Process Optimization with Mutual Information
 Gaussian Process Optimization with Mutual Information Emile Contal 1 Vianney Perchet 2 Nicolas Vayatis 1 1 CMLA Ecole Normale Suprieure de Cachan & CNRS, France 2 LPMA Université Paris Diderot & CNRS,
Gaussian Process Optimization with Mutual Information Emile Contal 1 Vianney Perchet 2 Nicolas Vayatis 1 1 CMLA Ecole Normale Suprieure de Cachan & CNRS, France 2 LPMA Université Paris Diderot & CNRS,
CONTROL AND OPTIMIZATION IN SMART-GRIDS
 CONTROL AND OPTIMIZATION IN SMART-GRIDS Fredy Ruiz Ph.D. Pontificia Universidad Javeriana, Colombia Visiting Profesor - ruizf@javeriana.edu.co May, 2018 Course topics Session 1: Introduction to Power systems
CONTROL AND OPTIMIZATION IN SMART-GRIDS Fredy Ruiz Ph.D. Pontificia Universidad Javeriana, Colombia Visiting Profesor - ruizf@javeriana.edu.co May, 2018 Course topics Session 1: Introduction to Power systems
COMP 551 Applied Machine Learning Lecture 20: Gaussian processes
 COMP 55 Applied Machine Learning Lecture 2: Gaussian processes Instructor: Ryan Lowe (ryan.lowe@cs.mcgill.ca) Slides mostly by: (herke.vanhoof@mcgill.ca) Class web page: www.cs.mcgill.ca/~hvanho2/comp55
COMP 55 Applied Machine Learning Lecture 2: Gaussian processes Instructor: Ryan Lowe (ryan.lowe@cs.mcgill.ca) Slides mostly by: (herke.vanhoof@mcgill.ca) Class web page: www.cs.mcgill.ca/~hvanho2/comp55
ECO 513 Fall 2008 C.Sims KALMAN FILTER. s t = As t 1 + ε t Measurement equation : y t = Hs t + ν t. u t = r t. u 0 0 t 1 + y t = [ H I ] u t.
![ECO 513 Fall 2008 C.Sims KALMAN FILTER. s t = As t 1 + ε t Measurement equation : y t = Hs t + ν t. u t = r t. u 0 0 t 1 + y t = [ H I ] u t.](/thumbs/87/95887004.jpg "ECO 513 Fall 2008 C.Sims KALMAN FILTER. s t = As t 1 + ε t Measurement equation : y t = Hs t + ν t. u t = r t. u 0 0 t 1 + y t = [ H I ] u t.") ECO 513 Fall 2008 C.Sims KALMAN FILTER Model in the form 1. THE KALMAN FILTER Plant equation : s t = As t 1 + ε t Measurement equation : y t = Hs t + ν t. Var(ε t ) = Ω, Var(ν t ) = Ξ. ε t ν t and (ε t,
ECO 513 Fall 2008 C.Sims KALMAN FILTER Model in the form 1. THE KALMAN FILTER Plant equation : s t = As t 1 + ε t Measurement equation : y t = Hs t + ν t. Var(ε t ) = Ω, Var(ν t ) = Ξ. ε t ν t and (ε t,
Adaptive Sampling of Clouds with a Fleet of UAVs: Improving Gaussian Process Regression by Including Prior Knowledge
 Master s Thesis Presentation Adaptive Sampling of Clouds with a Fleet of UAVs: Improving Gaussian Process Regression by Including Prior Knowledge Diego Selle (RIS @ LAAS-CNRS, RT-TUM) Master s Thesis Presentation
Master s Thesis Presentation Adaptive Sampling of Clouds with a Fleet of UAVs: Improving Gaussian Process Regression by Including Prior Knowledge Diego Selle (RIS @ LAAS-CNRS, RT-TUM) Master s Thesis Presentation
SECTION 5.1: Polynomials
 1 SECTION 5.1: Polynomials Functions Definitions: Function, Independent Variable, Dependent Variable, Domain, and Range A function is a rule that assigns to each input value x exactly output value y =
1 SECTION 5.1: Polynomials Functions Definitions: Function, Independent Variable, Dependent Variable, Domain, and Range A function is a rule that assigns to each input value x exactly output value y =
The Expectation-Maximization Algorithm
 1/29 EM & Latent Variable Models Gaussian Mixture Models EM Theory The Expectation-Maximization Algorithm Mihaela van der Schaar Department of Engineering Science University of Oxford MLE for Latent Variable
1/29 EM & Latent Variable Models Gaussian Mixture Models EM Theory The Expectation-Maximization Algorithm Mihaela van der Schaar Department of Engineering Science University of Oxford MLE for Latent Variable
DS-GA 1002 Lecture notes 12 Fall Linear regression
 DS-GA Lecture notes 1 Fall 16 1 Linear models Linear regression In statistics, regression consists of learning a function relating a certain quantity of interest y, the response or dependent variable,
DS-GA Lecture notes 1 Fall 16 1 Linear models Linear regression In statistics, regression consists of learning a function relating a certain quantity of interest y, the response or dependent variable,
Design for Reliability and Robustness through Probabilistic Methods in COMSOL Multiphysics with OptiY
 Excerpt from the Proceedings of the COMSOL Conference 2008 Hannover Design for Reliability and Robustness through Probabilistic Methods in COMSOL Multiphysics with OptiY The-Quan Pham * 1, Holger Neubert
Excerpt from the Proceedings of the COMSOL Conference 2008 Hannover Design for Reliability and Robustness through Probabilistic Methods in COMSOL Multiphysics with OptiY The-Quan Pham * 1, Holger Neubert
Lecture 4: Dynamic Programming
 Lecture 4: Dynamic Programming Fatih Guvenen January 10, 2016 Fatih Guvenen Lecture 4: Dynamic Programming January 10, 2016 1 / 30 Goal Solve V (k, z) =max c,k 0 u(c)+ E(V (k 0, z 0 ) z) c + k 0 =(1 +
Lecture 4: Dynamic Programming Fatih Guvenen January 10, 2016 Fatih Guvenen Lecture 4: Dynamic Programming January 10, 2016 1 / 30 Goal Solve V (k, z) =max c,k 0 u(c)+ E(V (k 0, z 0 ) z) c + k 0 =(1 +
Probabilistic numerics for deep learning
 Presenter: Shijia Wang Department of Engineering Science, University of Oxford rning (RLSS) Summer School, Montreal 2017 Outline 1 Introduction Probabilistic Numerics 2 Components Probabilistic modeling
Presenter: Shijia Wang Department of Engineering Science, University of Oxford rning (RLSS) Summer School, Montreal 2017 Outline 1 Introduction Probabilistic Numerics 2 Components Probabilistic modeling
The geometry of Gaussian processes and Bayesian optimization. Contal CMLA, ENS Cachan
 The geometry of Gaussian processes and Bayesian optimization. Contal CMLA, ENS Cachan Background: Global Optimization and Gaussian Processes The Geometry of Gaussian Processes and the Chaining Trick Algorithm
The geometry of Gaussian processes and Bayesian optimization. Contal CMLA, ENS Cachan Background: Global Optimization and Gaussian Processes The Geometry of Gaussian Processes and the Chaining Trick Algorithm
A Tour of Reinforcement Learning The View from Continuous Control. Benjamin Recht University of California, Berkeley
 A Tour of Reinforcement Learning The View from Continuous Control Benjamin Recht University of California, Berkeley trustable, scalable, predictable Control Theory! Reinforcement Learning is the study
A Tour of Reinforcement Learning The View from Continuous Control Benjamin Recht University of California, Berkeley trustable, scalable, predictable Control Theory! Reinforcement Learning is the study
Bayesian Methods for Machine Learning
 Bayesian Methods for Machine Learning CS 584: Big Data Analytics Material adapted from Radford Neal s tutorial (http://ftp.cs.utoronto.ca/pub/radford/bayes-tut.pdf), Zoubin Ghahramni (http://hunch.net/~coms-4771/zoubin_ghahramani_bayesian_learning.pdf),
Bayesian Methods for Machine Learning CS 584: Big Data Analytics Material adapted from Radford Neal s tutorial (http://ftp.cs.utoronto.ca/pub/radford/bayes-tut.pdf), Zoubin Ghahramni (http://hunch.net/~coms-4771/zoubin_ghahramani_bayesian_learning.pdf),
Uncertainty Propagation and Global Sensitivity Analysis in Hybrid Simulation using Polynomial Chaos Expansion
 Uncertainty Propagation and Global Sensitivity Analysis in Hybrid Simulation using Polynomial Chaos Expansion EU-US-Asia workshop on hybrid testing Ispra, 5-6 October 2015 G. Abbiati, S. Marelli, O.S.
Uncertainty Propagation and Global Sensitivity Analysis in Hybrid Simulation using Polynomial Chaos Expansion EU-US-Asia workshop on hybrid testing Ispra, 5-6 October 2015 G. Abbiati, S. Marelli, O.S.
MARKOV DECISION PROCESSES (MDP) AND REINFORCEMENT LEARNING (RL) Versione originale delle slide fornita dal Prof. Francesco Lo Presti
 AND REINFORCEMENT LEARNING (RL) Versione originale delle slide fornita dal Prof. Francesco Lo Presti") 1 MARKOV DECISION PROCESSES (MDP) AND REINFORCEMENT LEARNING (RL) Versione originale delle slide fornita dal Prof. Francesco Lo Presti Historical background 2 Original motivation: animal learning Early
1 MARKOV DECISION PROCESSES (MDP) AND REINFORCEMENT LEARNING (RL) Versione originale delle slide fornita dal Prof. Francesco Lo Presti Historical background 2 Original motivation: animal learning Early
Organization. I MCMC discussion. I project talks. I Lecture.
 Organization I MCMC discussion I project talks. I Lecture. Content I Uncertainty Propagation Overview I Forward-Backward with an Ensemble I Model Reduction (Intro) Uncertainty Propagation in Causal Systems
Organization I MCMC discussion I project talks. I Lecture. Content I Uncertainty Propagation Overview I Forward-Backward with an Ensemble I Model Reduction (Intro) Uncertainty Propagation in Causal Systems
Complexity of stochastic branch and bound methods for belief tree search in Bayesian reinforcement learning
 Complexity of stochastic branch and bound methods for belief tree search in Bayesian reinforcement learning Christos Dimitrakakis Informatics Institute, University of Amsterdam, Amsterdam, The Netherlands
Complexity of stochastic branch and bound methods for belief tree search in Bayesian reinforcement learning Christos Dimitrakakis Informatics Institute, University of Amsterdam, Amsterdam, The Netherlands
Nonparametric forecasting of the French load curve
 An overview RTE & UPMC-ISUP ISNPS 214, Cadix June 15, 214 Table of contents 1 Introduction 2 MAVE modeling 3 IBR modeling 4 Sparse modeling Electrical context Generation must be strictly equal to consumption
An overview RTE & UPMC-ISUP ISNPS 214, Cadix June 15, 214 Table of contents 1 Introduction 2 MAVE modeling 3 IBR modeling 4 Sparse modeling Electrical context Generation must be strictly equal to consumption
Optimization in the Big Data Regime 2: SVRG & Tradeoffs in Large Scale Learning. Sham M. Kakade
 Optimization in the Big Data Regime 2: SVRG & Tradeoffs in Large Scale Learning. Sham M. Kakade Machine Learning for Big Data CSE547/STAT548 University of Washington S. M. Kakade (UW) Optimization for
Optimization in the Big Data Regime 2: SVRG & Tradeoffs in Large Scale Learning. Sham M. Kakade Machine Learning for Big Data CSE547/STAT548 University of Washington S. M. Kakade (UW) Optimization for
Discussion Papers in Economics
 Discussion Papers in Economics No. 10/11 A General Equilibrium Corporate Finance Theorem for Incomplete Markets: A Special Case By Pascal Stiefenhofer, University of York Department of Economics and Related
Discussion Papers in Economics No. 10/11 A General Equilibrium Corporate Finance Theorem for Incomplete Markets: A Special Case By Pascal Stiefenhofer, University of York Department of Economics and Related
Sample average approximation and cascading failures of power grids. Daniel Bienstock, Guy Grebla, Tingjun Chen, Columbia University GraphEx 15
 Sample average approximation and cascading failures of power grids Daniel Bienstock, Guy Grebla, Tingjun Chen, Columbia University GraphEx 15 August 14 2003 Approximately 50 million people affected Other
Sample average approximation and cascading failures of power grids Daniel Bienstock, Guy Grebla, Tingjun Chen, Columbia University GraphEx 15 August 14 2003 Approximately 50 million people affected Other
The Bayes classifier
 The Bayes classifier Consider where is a random vector in is a random variable (depending on ) Let be a classifier with probability of error/risk given by The Bayes classifier (denoted ) is the optimal
The Bayes classifier Consider where is a random vector in is a random variable (depending on ) Let be a classifier with probability of error/risk given by The Bayes classifier (denoted ) is the optimal
Lecture 1: Dynamic Programming
 Lecture 1: Dynamic Programming Fatih Guvenen November 2, 2016 Fatih Guvenen Lecture 1: Dynamic Programming November 2, 2016 1 / 32 Goal Solve V (k, z) =max c,k 0 u(c)+ E(V (k 0, z 0 ) z) c + k 0 =(1 +
Lecture 1: Dynamic Programming Fatih Guvenen November 2, 2016 Fatih Guvenen Lecture 1: Dynamic Programming November 2, 2016 1 / 32 Goal Solve V (k, z) =max c,k 0 u(c)+ E(V (k 0, z 0 ) z) c + k 0 =(1 +
Price Discrimination through Refund Contracts in Airlines
 Introduction Price Discrimination through Refund Contracts in Airlines Paan Jindapon Department of Economics and Finance The University of Texas - Pan American Department of Economics, Finance and Legal
Introduction Price Discrimination through Refund Contracts in Airlines Paan Jindapon Department of Economics and Finance The University of Texas - Pan American Department of Economics, Finance and Legal
CPSC 540: Machine Learning
 CPSC 540: Machine Learning MCMC and Non-Parametric Bayes Mark Schmidt University of British Columbia Winter 2016 Admin I went through project proposals: Some of you got a message on Piazza. No news is
CPSC 540: Machine Learning MCMC and Non-Parametric Bayes Mark Schmidt University of British Columbia Winter 2016 Admin I went through project proposals: Some of you got a message on Piazza. No news is
Advanced analysis and modelling tools for spatial environmental data. Case study: indoor radon data in Switzerland
 EnviroInfo 2004 (Geneva) Sh@ring EnviroInfo 2004 Advanced analysis and modelling tools for spatial environmental data. Case study: indoor radon data in Switzerland Mikhail Kanevski 1, Michel Maignan 1
EnviroInfo 2004 (Geneva) Sh@ring EnviroInfo 2004 Advanced analysis and modelling tools for spatial environmental data. Case study: indoor radon data in Switzerland Mikhail Kanevski 1, Michel Maignan 1
Sparse polynomial chaos expansions in engineering applications
 DEPARTMENT OF CIVIL, ENVIRONMENTAL AND GEOMATIC ENGINEERING CHAIR OF RISK, SAFETY & UNCERTAINTY QUANTIFICATION Sparse polynomial chaos expansions in engineering applications B. Sudret G. Blatman (EDF R&D,
DEPARTMENT OF CIVIL, ENVIRONMENTAL AND GEOMATIC ENGINEERING CHAIR OF RISK, SAFETY & UNCERTAINTY QUANTIFICATION Sparse polynomial chaos expansions in engineering applications B. Sudret G. Blatman (EDF R&D,