STATICS. FE Review. Statics, Fourteenth Edition R.C. Hibbeler. Copyright 2016 by Pearson Education, Inc. All rights reserved.
|
|
|
- Gilbert Austin
- 5 years ago
- Views:
Transcription
1 STATICS FE Review

2 1. Resultants of force systems
3 VECTOR OPERATIONS (Section 2.2) Scalar Multiplication and Division
4 VECTOR ADDITION USING EITHER THE PARALLELOGRAM LAW OR TRIANGLE Parallelogram Law: Triangle method (always tip to tail ): How do you subtract a vector? How can you add more than two concurrent vectors graphically?
5 RESOLUTION OF A VECTOR Resolution of a vector is breaking up a vector into components. It is kind of like using the parallelogram law in reverse.
6 ADDITION OF A SYSTEM OF COPLANAR FORCES (Section 2.4) We resolve vectors into components using the x and y-axis coordinate system. Each component of the vector is shown as a magnitude and a direction. The directions are based on the x and y axes. We use the unit vectors i and j to designate the x and y-axes.

7 For example, F = F x i + F y j or F' = F' x i + ( F' y ) j The x and y-axis are always perpendicular to each other. Together, they can be set at any inclination.
8 ADDITION OF SEVERAL VECTORS Step 1 is to resolve each force into its components. Step 2 is to add all the x- components together, followed by adding all the y-components together. These two totals are the x and y-components of the resultant vector. Step 3 is to find the magnitude and angle of the resultant vector.
9 An example of the process: Break the three vectors into components, then add them. F R = F 1 + F 2 + F 3 = F 1x i + F 1y j F 2x i + F 2y j + F 3x i F 3y j = (F 1x F 2x + F 3x ) i + (F 1y + F 2y F 3y ) j = (F Rx ) i + (F Ry ) j
10 You can also represent a 2-D vector with a magnitude and angle. = tan 1 F F Ry Rx F = F + F 2 2 R Rx Ry
11 EXAMPLE I Given: Three concurrent forces acting on a tent post. Find: The magnitude and angle of the resultant force. Plan: a) Resolve the forces into their x-y components. b) Add the respective components to get the resultant vector. c) Find magnitude and angle from the resultant components.

12 EQUILIBRIUM OF A PARTICLE, THE FREE-BODY DIAGRAM

13 APPLICATIONS For a spool of given weight, how would you find the forces in cables AB and AC? If designing a spreader bar like the one being used here, you need to know the forces to make sure the rigging doesn t fail.
14 APPLICATIONS (continued)
15 SIMPLE SPRINGS
16 CABLES AND PULLEYS T1 T2
17 GROUP PROBLEM SOLVING Given: The mass of lamp is 20 kg and geometry is as shown. Find: The force in each cable. Plan:
18 EQUIVALENT FORCE SYSTEMS


19 APPLICATIONS (continued)?? Several forces and a couple moment are acting on this vertical section of an I-beam.
")
20 SIMPLIFICATION OF FORCE AND COUPLE SYSTEM (Section 4.7)
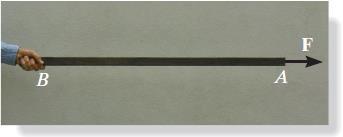
21 MOVING A FORCE ON ITS LINE OF ACTION
22 MOVING A FORCE OFF OF ITS LINE OF ACTION B
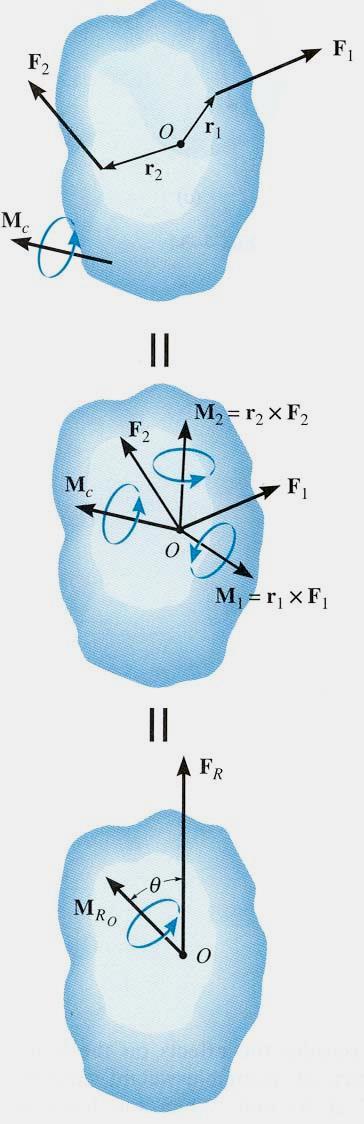
23 SIMPLIFICATION OF A FORCE AND COUPLE SYSTEM
 WR = W1 + W2 (MR)o = W1 d1 + W2")
24 SIMPLIFICATION OF A FORCE AND COUPLE SYSTEM (continued) WR = W1 + W2 (MR)o = W1 d1 + W2 d2
25 GROUP PROBLEM SOLVING I Given: A 2-D force and couple system as shown. Find: The equivalent resultant force and couple moment acting at A. Plan:

26 RIGID BODY: EQUATIONS OF EQUILIBRIUM

27 APPLICATIONS A
28 APPLICATIONS (continued)
 Fx = 0 Fy = 0 Mo = 0 where point O is any")
29 EQUATIONS OF EQUILIBRIUM (Section 5.3) Fx = 0 Fy = 0 Mo = 0 where point O is any arbitrary point.
30 TWO-FORCE MEMBERS & THREE FORCE- MEMBERS (Section 5.4)


31 EXAMPLES OF TWO-FORCE MEMBERS
32 EXAMPLE Given: The 4kN load at B of the beam is supported by pins at A and C. Find: Plan: The support reactions at A and C.

33 SIMPLE TRUSSES, THE METHOD OF JOINTS, & ZERO-FORCE MEMBERS
34 THE METHOD OF JOINTS (Section 6.2) A free-body diagram of Joint B
35 ZERO-FORCE MEMBERS (Section 6.3) If a joint has only two non-collinear members and there is no external load or support reaction at that joint, then those two members are zeroforce members.


36 ZERO FORCE MEMBERS (continued) If three members form a truss joint for which two of the members are collinear and there is no external load or reaction at that joint, then the third non-collinear member is a zero force member, e.g., DA.

37 EXAMPLE Given: Loads as shown on the truss Find: The forces in each member of the truss. Plan:

38 THE METHOD OF SECTIONS


39 APPLICATIONS
40 STEPS FOR ANALYSIS

41 EXAMPLE Given: Loads as shown on the truss. Find: The force in members KJ, KD, and CD. Plan:

42 FRAMES AND MACHINES


43 APPLICATIONS Machines, like those above, are used in a variety of applications. How are they different from trusses and frames?

44 FRAMES AND MACHINES: DEFINITIONS Frame Machine Frames are generally stationary and support external loads.
45 STEPS FOR ANALYZING A FRAME OR MACHINE FAB
46 EXAMPLE Given: The frame supports an external load and moment as shown. Find: The horizontal and vertical components of the pin reactions at C and the magnitude of reaction at B. Plan:


47 CHARACTERISTICS OF DRY FRICTION

48 APPLICATIONS In designing a brake system for a bicycle, car, or any other vehicle, it is important to understand the frictional forces involved.

49 APPLICATIONS (continued) The rope is used to tow the refrigerator. In order to move the refrigerator, is it best to pull up as shown, pull horizontally, or pull downwards on the rope?
 Friction is defined as a force of resistance acting on a body which")
 to the")

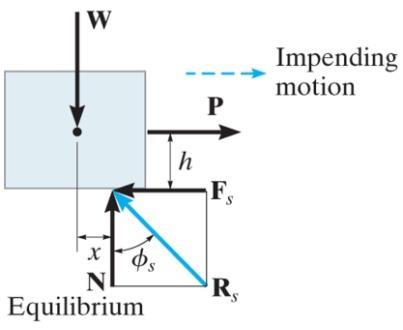
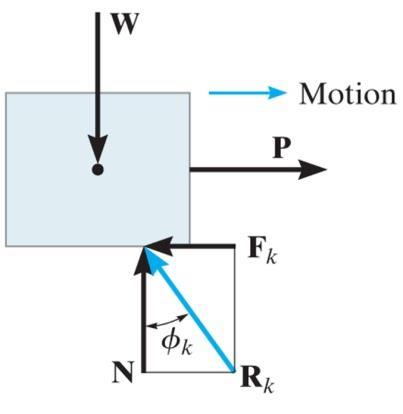
50 CHARACTERISTICS OF DRY FRICTION (Section 8.1) Friction is defined as a force of resistance acting on a body which prevents or resists the slipping of a body relative to a second body. Experiments show that frictional forces act tangent (parallel) to the contacting surface in a direction opposing the relative motion or tendency for motion. For the body shown in the figure to be in equilibrium, the following must be true: F = P, N = W, and W*x = P*h.

51 CHARACTERISTICS OF DRY FRICTION (continued)
52 CHARACTERISTICS OF DRY FRICTION (continued)

53 IMPENDING TIPPING versus SLIPPING For a given W and h of the box, how can we determine if the block will slide or tip first? In this case, we have four unknowns (F, N, x, and P) and only the three E-of-E.
54 IMPENDING TIPPING versus SLIPPING (continued) Assume: Slipping occurs Known: F = s N Solve: x, P, and N Check: 0 x b/2 Or Assume: Tipping occurs Known: x = b/2 Solve: P, N, and F Check: F s N
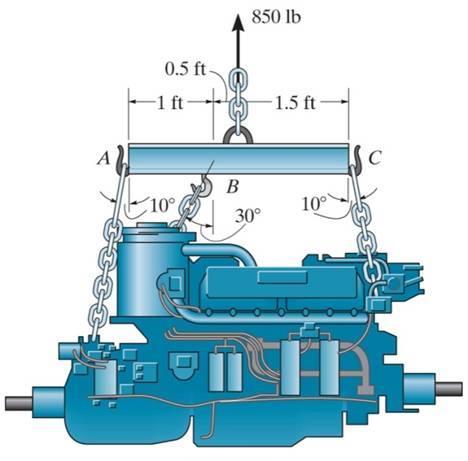
55 Given: Crate weight = 250 lb and s = 0.4 Find: The maximum force P that can be applied without causing movement of the?? crate. Plan: EXAMPLE
56 EXAMPLE (continued) Solution: 1.5 ft 1.5 ft P 250 lb 4.5 ft ft F x N FBD of the crate There are four unknowns: P, N, F and x. First, let s assume the crate slips. Then the friction equation is F = s N = 0.4 N.

57 EXAMPLE (continued) 1.5 ft 1.5 ft P 250 lb 4.5 ft 3.5 ft + FX = P 0.4 N = 0 + FY = N 250 = 0 Solving these two equations gives: 0 x FBD of the crate N F P = 100 lb and N = 250 lb + MO = -100 (4.5) (x) = 0 Check: x = : No slipping will occur since x 1.5
58 EXAMPLE (continued) Since tipping occurs, here is the correct FBD: 1.5 ft 1.5 ft + FX = P F = 0 + FY = N 250 = 0 These two equations give: P = F and N = 250 lb P 4.5 ft 250 lb A 3.5 ft F + MA = P (4.5) (1.5) = 0 FBD of the crate N P = 83.3 lb, and F = 83.3 lb s N = 100 lb


59 CENTER OF GRAVITY, CENTER OF MASS AND CENTROID OF A BODY
60 APPLICATIONS
 is that it might tip over when taking a sharp")
61 APPLICATIONS (continued) One concern about a sport utility vehicle (SUV) is that it might tip over when taking a sharp turn.
62 APPLICATIONS (continued)


63 CONCEPT OF CENTER OF GRAVITY (CG)
64 CM & CENTROID OF A BODY

65 CONCEPT OF CENTROID
 Plan:")
66 EXAMPLE I Given: The area as shown. Find: The centroid location (x, y) Plan: Follow the steps.

67 CG/CM OF A COMPOSITE BODY


68 CONCEPT OF A COMPOSITE BODY
69 GROUP PROBLEM SOLVING a b d c Given: The part shown. Find: The centroid of the part. Plan: Follow the steps for analysis.

70 DEFINITION OF MOMENTS OF INERTIA FOR AREAS, RADIUS OF GYRATION OF AN AREA


71 APPLICATIONS Many structural members like beams and columns have cross sectional shapes like an I, H, C, etc..
72 DEFINITION OF MOMENTS OF INERTIA FOR AREAS 10cm 3cm 1cm 10cm 10cm 3cm x P (A) (B) (C) R S 1cm

73 DEFINITION OF MOMENTS OF INERTIA FOR AREAS For the differential area da, shown in the figure: d I x = y 2 da, d I y = x 2 da, and, d J O = r 2 da, where J O is the polar moment of inertia about the pole O or z axis.

74 MoI FOR AN AREA BY INTEGRATION For simplicity, the area element used has a differential size in only one direction (dx or dy). This results in a single integration and is usually simpler than doing a double integration with two differentials, i.e., dx dy.
 Find: The MoI of the area about the x- and y-axes.")
75 EXAMPLE Given: The shaded area shown in the figure. (x,y) Find: The MoI of the area about the x- and y-axes. Plan: Follow the steps given earlier.

76 PARALLEL-AXIS THEOREM, RADIUS OF GYRATION & MOMENT OF INERTIA FOR COMPOSITE AREAS

77 APPLICATIONS
78 APPLICATIONS (continued)
 This theorem relates the moment of inertia (MoI) of an area about an axis passing through the area s centroid to the MoI of the area about a corresponding parallel axis.")
79 PARALLEL-AXIS THEOREM FOR AN AREA (Section 10.2) This theorem relates the moment of inertia (MoI) of an area about an axis passing through the area s centroid to the MoI of the area about a corresponding parallel axis. This theorem has many practical applications, especially when working with composite areas. Consider an area with centroid C. The x' and y' axes pass through C. The MoI about the x-axis, which is parallel to, and distance dy from the x ' axis, is found by using the parallel-axis theorem.

80 PARALLEL-AXIS THEOREM (continued)

81 EXAMPLE Given: The beam s crosssectional area. [3] [2] [1] Find: Plan: The moment of inertia of the area about the x-axis Follow the steps for analysis.
F R. + F 3x. + F 2y. = (F 1x. j + F 3x. i + F 2y. i F 3y. i + F 1y. j F 2x. ) i + (F 1y. ) j. F 2x. F 3y. = (F ) i + (F ) j. ) j
 i + (F 1y. ) j. F 2x. F 3y. = (F ) i + (F ) j. ) j") General comments: closed book and notes but optional one page crib sheet allowed. STUDY: old exams, homework and power point lectures! Key: make sure you can solve your homework problems and exam problems.
General comments: closed book and notes but optional one page crib sheet allowed. STUDY: old exams, homework and power point lectures! Key: make sure you can solve your homework problems and exam problems.
CHARACTERISTICS OF DRY FRICTION & PROBLEMS INVOLVING DRY FRICTION
 CHARACTERISTICS OF DRY FRICTION & PROBLEMS INVOLVING DRY FRICTION Today s Objective: Students will be able to: a) Understand the characteristics of dry friction. b) Draw a FBD including friction. c) Solve
CHARACTERISTICS OF DRY FRICTION & PROBLEMS INVOLVING DRY FRICTION Today s Objective: Students will be able to: a) Understand the characteristics of dry friction. b) Draw a FBD including friction. c) Solve
VALLIAMMAI ENGINEERING COLLEGE SRM NAGAR, KATTANKULATHUR DEPARTMENT OF MECHANICAL ENGINEERING
 VALLIAMMAI ENGINEERING COLLEGE SRM NAGAR, KATTANKULATHUR 603203 DEPARTMENT OF MECHANICAL ENGINEERING BRANCH: MECHANICAL YEAR / SEMESTER: I / II UNIT 1 PART- A 1. State Newton's three laws of motion? 2.
VALLIAMMAI ENGINEERING COLLEGE SRM NAGAR, KATTANKULATHUR 603203 DEPARTMENT OF MECHANICAL ENGINEERING BRANCH: MECHANICAL YEAR / SEMESTER: I / II UNIT 1 PART- A 1. State Newton's three laws of motion? 2.
Engineering Mechanics Statics
 Mechanical Systems Engineering- 2016 Engineering Mechanics Statics 2. Force Vectors; Operations on Vectors Dr. Rami Zakaria MECHANICS, UNITS, NUMERICAL CALCULATIONS & GENERAL PROCEDURE FOR ANALYSIS Today
Mechanical Systems Engineering- 2016 Engineering Mechanics Statics 2. Force Vectors; Operations on Vectors Dr. Rami Zakaria MECHANICS, UNITS, NUMERICAL CALCULATIONS & GENERAL PROCEDURE FOR ANALYSIS Today
KINGS COLLEGE OF ENGINEERING ENGINEERING MECHANICS QUESTION BANK UNIT I - PART-A
 KINGS COLLEGE OF ENGINEERING ENGINEERING MECHANICS QUESTION BANK Sub. Code: CE1151 Sub. Name: Engg. Mechanics UNIT I - PART-A Sem / Year II / I 1.Distinguish the following system of forces with a suitable
KINGS COLLEGE OF ENGINEERING ENGINEERING MECHANICS QUESTION BANK Sub. Code: CE1151 Sub. Name: Engg. Mechanics UNIT I - PART-A Sem / Year II / I 1.Distinguish the following system of forces with a suitable
Statics Chapter II Fall 2018 Exercises Corresponding to Sections 2.1, 2.2, and 2.3
 Statics Chapter II Fall 2018 Exercises Corresponding to Sections 2.1, 2.2, and 2.3 2 3 Determine the magnitude of the resultant force FR = F1 + F2 and its direction, measured counterclockwise from the
Statics Chapter II Fall 2018 Exercises Corresponding to Sections 2.1, 2.2, and 2.3 2 3 Determine the magnitude of the resultant force FR = F1 + F2 and its direction, measured counterclockwise from the
STATICS. Bodies. Vector Mechanics for Engineers: Statics VECTOR MECHANICS FOR ENGINEERS: Design of a support
 4 Equilibrium CHAPTER VECTOR MECHANICS FOR ENGINEERS: STATICS Ferdinand P. Beer E. Russell Johnston, Jr. Lecture Notes: J. Walt Oler Texas Tech University of Rigid Bodies 2010 The McGraw-Hill Companies,
4 Equilibrium CHAPTER VECTOR MECHANICS FOR ENGINEERS: STATICS Ferdinand P. Beer E. Russell Johnston, Jr. Lecture Notes: J. Walt Oler Texas Tech University of Rigid Bodies 2010 The McGraw-Hill Companies,
TABLE OF CONTENTS. Preface...
 TABLE OF CONTENTS Preface...................................... xiv 1 Introduction........................................ 1 1.1 Engineering and Statics.............................. 1 1.2 A Brief History
TABLE OF CONTENTS Preface...................................... xiv 1 Introduction........................................ 1 1.1 Engineering and Statics.............................. 1 1.2 A Brief History
However, the friction forces are limited in magnitude and will not prevent motion if sufficiently large forces are applied.
 FRICTION 1 Introduction In preceding chapters, it was assumed that surfaces in contact were either frictionless (surfaces could move freely with respect to each other) or rough (tangential forces prevent
FRICTION 1 Introduction In preceding chapters, it was assumed that surfaces in contact were either frictionless (surfaces could move freely with respect to each other) or rough (tangential forces prevent
Vector Mechanics: Statics
 PDHOnline Course G492 (4 PDH) Vector Mechanics: Statics Mark A. Strain, P.E. 2014 PDH Online PDH Center 5272 Meadow Estates Drive Fairfax, VA 22030-6658 Phone & Fax: 703-988-0088 www.pdhonline.org www.pdhcenter.com
PDHOnline Course G492 (4 PDH) Vector Mechanics: Statics Mark A. Strain, P.E. 2014 PDH Online PDH Center 5272 Meadow Estates Drive Fairfax, VA 22030-6658 Phone & Fax: 703-988-0088 www.pdhonline.org www.pdhcenter.com
STATICS SECOND EDITION
 Engineering Mechanics STATICS SECOND EDITION Michael E. Plesha Department of Engineering Physics University of Wisconsin-Madison Gary L. Gray Department of Engineering Science and Mechanics Penn State
Engineering Mechanics STATICS SECOND EDITION Michael E. Plesha Department of Engineering Physics University of Wisconsin-Madison Gary L. Gray Department of Engineering Science and Mechanics Penn State
REVIEW. Final Exam. Final Exam Information. Final Exam Information. Strategy for Studying. Test taking strategy. Sign Convention Rules
 Final Exam Information REVIEW Final Exam (Print notes) DATE: WEDNESDAY, MAY 12 TIME: 1:30 PM - 3:30 PM ROOM ASSIGNMENT: Toomey Hall Room 199 1 2 Final Exam Information Comprehensive exam covers all topics
Final Exam Information REVIEW Final Exam (Print notes) DATE: WEDNESDAY, MAY 12 TIME: 1:30 PM - 3:30 PM ROOM ASSIGNMENT: Toomey Hall Room 199 1 2 Final Exam Information Comprehensive exam covers all topics
AREAS, RADIUS OF GYRATION
 Chapter 10 MOMENTS of INERTIA for AREAS, RADIUS OF GYRATION Today s Objectives: Students will be able to: a) Define the moments of inertia (MoI) for an area. b) Determine the MoI for an area by integration.
Chapter 10 MOMENTS of INERTIA for AREAS, RADIUS OF GYRATION Today s Objectives: Students will be able to: a) Define the moments of inertia (MoI) for an area. b) Determine the MoI for an area by integration.
FE Sta'cs Review. Torch Ellio0 (801) MCE room 2016 (through 2000B door)
 MCE room 2016 (through 2000B door)") FE Sta'cs Review h0p://www.coe.utah.edu/current- undergrad/fee.php Scroll down to: Sta'cs Review - Slides Torch Ellio0 ellio0@eng.utah.edu (801) 587-9016 MCE room 2016 (through 2000B door) Posi'on and
FE Sta'cs Review h0p://www.coe.utah.edu/current- undergrad/fee.php Scroll down to: Sta'cs Review - Slides Torch Ellio0 ellio0@eng.utah.edu (801) 587-9016 MCE room 2016 (through 2000B door) Posi'on and
Dry Friction Static vs. Kinetic Angles
 Outline: Types of Friction Dry Friction Static vs. Kinetic Angles Applications of Friction 1 Contacting surfaces typically support normal and tangential forces Friction is a tangential force Friction occurs
Outline: Types of Friction Dry Friction Static vs. Kinetic Angles Applications of Friction 1 Contacting surfaces typically support normal and tangential forces Friction is a tangential force Friction occurs
Chapter 5. The Laws of Motion
 Chapter 5 The Laws of Motion The Laws of Motion The description of an object in motion included its position, velocity, and acceleration. There was no consideration of what might influence that motion.
Chapter 5 The Laws of Motion The Laws of Motion The description of an object in motion included its position, velocity, and acceleration. There was no consideration of what might influence that motion.
Unit 21 Couples and Resultants with Couples
 Unit 21 Couples and Resultants with Couples Page 21-1 Couples A couple is defined as (21-5) Moment of Couple The coplanar forces F 1 and F 2 make up a couple and the coordinate axes are chosen so that
Unit 21 Couples and Resultants with Couples Page 21-1 Couples A couple is defined as (21-5) Moment of Couple The coplanar forces F 1 and F 2 make up a couple and the coordinate axes are chosen so that
Course Overview. Statics (Freshman Fall) Dynamics: x(t)= f(f(t)) displacement as a function of time and applied force
 Dynamics: x(t)= f(f(t)) displacement as a function of time and applied force") Course Overview Statics (Freshman Fall) Engineering Mechanics Dynamics (Freshman Spring) Strength of Materials (Sophomore Fall) Mechanism Kinematics and Dynamics (Sophomore Spring ) Aircraft structures
Course Overview Statics (Freshman Fall) Engineering Mechanics Dynamics (Freshman Spring) Strength of Materials (Sophomore Fall) Mechanism Kinematics and Dynamics (Sophomore Spring ) Aircraft structures
E 490 FE Exam Prep. Engineering Mechanics
 E 490 FE Exam Prep Engineering Mechanics 2008 E 490 Course Topics Statics Newton s Laws of Motion Resultant Force Systems Moment of Forces and Couples Equilibrium Pulley Systems Trusses Centroid of an
E 490 FE Exam Prep Engineering Mechanics 2008 E 490 Course Topics Statics Newton s Laws of Motion Resultant Force Systems Moment of Forces and Couples Equilibrium Pulley Systems Trusses Centroid of an
Engineering Mechanics: Statics in SI Units, 12e
 Engineering Mechanics: Statics in SI Units, 12e 5 Equilibrium of a Rigid Body Chapter Objectives Develop the equations of equilibrium for a rigid body Concept of the free-body diagram for a rigid body
Engineering Mechanics: Statics in SI Units, 12e 5 Equilibrium of a Rigid Body Chapter Objectives Develop the equations of equilibrium for a rigid body Concept of the free-body diagram for a rigid body
Outline: Types of Friction Dry Friction Static vs. Kinetic Angles Applications of Friction. ENGR 1205 Appendix B
 Outline: Types of Friction Dry Friction Static vs. Kinetic Angles Applications of Friction ENGR 1205 Appendix B 1 Contacting surfaces typically support normal and tangential forces Friction is a tangential
Outline: Types of Friction Dry Friction Static vs. Kinetic Angles Applications of Friction ENGR 1205 Appendix B 1 Contacting surfaces typically support normal and tangential forces Friction is a tangential
Equilibrium of a Particle
 ME 108 - Statics Equilibrium of a Particle Chapter 3 Applications For a spool of given weight, what are the forces in cables AB and AC? Applications For a given weight of the lights, what are the forces
ME 108 - Statics Equilibrium of a Particle Chapter 3 Applications For a spool of given weight, what are the forces in cables AB and AC? Applications For a given weight of the lights, what are the forces
Questions from all units
 Questions from all units S.NO 1. 1 UNT NO QUESTON Explain the concept of force and its characteristics. BLOOMS LEVEL LEVEL 2. 2 Explain different types of force systems with examples. Determine the magnitude
Questions from all units S.NO 1. 1 UNT NO QUESTON Explain the concept of force and its characteristics. BLOOMS LEVEL LEVEL 2. 2 Explain different types of force systems with examples. Determine the magnitude
MECHANICS. Prepared by Engr. John Paul Timola
 MECHANICS Prepared by Engr. John Paul Timola MECHANICS a branch of the physical sciences that is concerned with the state of rest or motion of bodies that are subjected to the action of forces. subdivided
MECHANICS Prepared by Engr. John Paul Timola MECHANICS a branch of the physical sciences that is concerned with the state of rest or motion of bodies that are subjected to the action of forces. subdivided
FE Statics Review. Sanford Meek Department of Mechanical Engineering Kenn 226 (801)
") FE Statics Review Sanford Meek Department of Mechanical Engineering Kenn 226 (801)581-8562 meek@mech.utah.edu Statics! forces = 0!moments = 0 2 Vectors Scalars have magnitude only Vectors have magnitude
FE Statics Review Sanford Meek Department of Mechanical Engineering Kenn 226 (801)581-8562 meek@mech.utah.edu Statics! forces = 0!moments = 0 2 Vectors Scalars have magnitude only Vectors have magnitude
Chapter Objectives. Copyright 2011 Pearson Education South Asia Pte Ltd
 Chapter Objectives To develop the equations of equilibrium for a rigid body. To introduce the concept of the free-body diagram for a rigid body. To show how to solve rigid-body equilibrium problems using
Chapter Objectives To develop the equations of equilibrium for a rigid body. To introduce the concept of the free-body diagram for a rigid body. To show how to solve rigid-body equilibrium problems using
if the initial displacement and velocities are zero each. [ ] PART-B
![if the initial displacement and velocities are zero each. [ ] PART-B](/thumbs/86/94772448.jpg "if the initial displacement and velocities are zero each. [ ] PART-B") Set No - 1 I. Tech II Semester Regular Examinations ugust - 2014 ENGINEERING MECHNICS (Common to ECE, EEE, EIE, io-tech, E Com.E, gri. E) Time: 3 hours Max. Marks: 70 Question Paper Consists of Part- and
Set No - 1 I. Tech II Semester Regular Examinations ugust - 2014 ENGINEERING MECHNICS (Common to ECE, EEE, EIE, io-tech, E Com.E, gri. E) Time: 3 hours Max. Marks: 70 Question Paper Consists of Part- and
EQUATIONS OF EQUILIBRIUM & TWO- AND THREE-FORCE MEMEBERS
 EQUATIONS OF EQUILIBRIUM & TWO- AND THREE-FORCE MEMEBERS Today s Objectives: Students will be able to: a) Apply equations of equilibrium to solve for unknowns, and b) Recognize two-force members. In-Class
EQUATIONS OF EQUILIBRIUM & TWO- AND THREE-FORCE MEMEBERS Today s Objectives: Students will be able to: a) Apply equations of equilibrium to solve for unknowns, and b) Recognize two-force members. In-Class
EQUILIBRIUM OF A PARTICLE, THE FREE-BODY DIAGRAM & COPLANAR FORCE SYSTEMS
 EQUILIBRIUM OF PRTICLE, THE FREE-BODY DIGRM & COPLNR FORCE SYSTEMS Today s Objectives: Students will be able to : a) Draw a free body diagram (FBD), and, b) pply equations of equilibrium to solve a 2-D
EQUILIBRIUM OF PRTICLE, THE FREE-BODY DIGRM & COPLNR FORCE SYSTEMS Today s Objectives: Students will be able to : a) Draw a free body diagram (FBD), and, b) pply equations of equilibrium to solve a 2-D
I B.TECH EXAMINATIONS, JUNE ENGINEERING MECHANICS (COMMON TO CE, ME, CHEM, MCT, MMT, AE, AME, MIE, MIM)
") Code.No: 09A1BS05 R09 SET-1 I B.TECH EXAMINATIONS, JUNE - 2011 ENGINEERING MECHANICS (COMMON TO CE, ME, CHEM, MCT, MMT, AE, AME, MIE, MIM) Time: 3 hours Max. Marks: 75 Answer any FIVE questions All questions
Code.No: 09A1BS05 R09 SET-1 I B.TECH EXAMINATIONS, JUNE - 2011 ENGINEERING MECHANICS (COMMON TO CE, ME, CHEM, MCT, MMT, AE, AME, MIE, MIM) Time: 3 hours Max. Marks: 75 Answer any FIVE questions All questions
PESIT- Bangalore South Campus Dept of science & Humanities Sub: Elements Of Civil Engineering & Engineering Mechanics 1 st module QB
 PESIT- Bangalore South Campus Dept of science & Humanities Sub: Elements Of Civil Engineering & Engineering Mechanics 1 st module QB Sub Code: 15CIV13/23 1. Briefly give the scope of different fields in
PESIT- Bangalore South Campus Dept of science & Humanities Sub: Elements Of Civil Engineering & Engineering Mechanics 1 st module QB Sub Code: 15CIV13/23 1. Briefly give the scope of different fields in
Announcements. Equilibrium of a Rigid Body
 Announcements Equilibrium of a Rigid Body Today s Objectives Identify support reactions Draw a free body diagram Class Activities Applications Support reactions Free body diagrams Examples Engr221 Chapter
Announcements Equilibrium of a Rigid Body Today s Objectives Identify support reactions Draw a free body diagram Class Activities Applications Support reactions Free body diagrams Examples Engr221 Chapter
ASSOCIATE DEGREE IN ENGINEERING EXAMINATIONS SEMESTER /13
 ASSOCIATE DEGREE IN ENGINEERING EXAMINATIONS SEMESTER 2 2012/13 COURSE NAME: ENGINEERING MECHANICS - STATICS CODE: ENG 2008 GROUP: AD ENG II DATE: May 2013 TIME: DURATION: 2 HOURS INSTRUCTIONS: 1. This
ASSOCIATE DEGREE IN ENGINEERING EXAMINATIONS SEMESTER 2 2012/13 COURSE NAME: ENGINEERING MECHANICS - STATICS CODE: ENG 2008 GROUP: AD ENG II DATE: May 2013 TIME: DURATION: 2 HOURS INSTRUCTIONS: 1. This
SKAA 1213 Engineering Mechanics
 SKAA 1213 Engineering Mechanics TOPIC 6 FRICTION Lecturers: Rosli Anang Dr. Mohd Yunus Ishak Dr. Tan Cher Siang Lesson 7 Outline Introduction Equilibrium on a horizontal plane Equilibrium i on an inclined
SKAA 1213 Engineering Mechanics TOPIC 6 FRICTION Lecturers: Rosli Anang Dr. Mohd Yunus Ishak Dr. Tan Cher Siang Lesson 7 Outline Introduction Equilibrium on a horizontal plane Equilibrium i on an inclined
CIV100: Mechanics. Lecture Notes. Module 1: Force & Moment in 2D. You Know What to Do!
 CIV100: Mechanics Lecture Notes Module 1: Force & Moment in 2D By: Tamer El-Diraby, PhD, PEng. Associate Prof. & Director, I2C University of Toronto Acknowledgment: Hesham Osman, PhD and Jinyue Zhang,
CIV100: Mechanics Lecture Notes Module 1: Force & Moment in 2D By: Tamer El-Diraby, PhD, PEng. Associate Prof. & Director, I2C University of Toronto Acknowledgment: Hesham Osman, PhD and Jinyue Zhang,
The centroid of an area is defined as the point at which (12-2) The distance from the centroid of a given area to a specified axis may be found by
 The distance from the centroid of a given area to a specified axis may be found by") Unit 12 Centroids Page 12-1 The centroid of an area is defined as the point at which (12-2) The distance from the centroid of a given area to a specified axis may be found by (12-5) For the area shown
Unit 12 Centroids Page 12-1 The centroid of an area is defined as the point at which (12-2) The distance from the centroid of a given area to a specified axis may be found by (12-5) For the area shown
STATICS. Bodies VECTOR MECHANICS FOR ENGINEERS: Ninth Edition CHAPTER. Ferdinand P. Beer E. Russell Johnston, Jr.
 N E 4 Equilibrium CHAPTER VECTOR MECHANICS FOR ENGINEERS: STATICS Ferdinand P. Beer E. Russell Johnston, Jr. Lecture Notes: J. Walt Oler Texas Tech University of Rigid Bodies 2010 The McGraw-Hill Companies,
N E 4 Equilibrium CHAPTER VECTOR MECHANICS FOR ENGINEERS: STATICS Ferdinand P. Beer E. Russell Johnston, Jr. Lecture Notes: J. Walt Oler Texas Tech University of Rigid Bodies 2010 The McGraw-Hill Companies,
Where, m = slope of line = constant c = Intercept on y axis = effort required to start the machine
 (ISO/IEC - 700-005 Certified) Model Answer: Summer 07 Code: 70 Important Instructions to examiners: ) The answers should be examined by key words and not as word-to-word as given in the model answer scheme.
(ISO/IEC - 700-005 Certified) Model Answer: Summer 07 Code: 70 Important Instructions to examiners: ) The answers should be examined by key words and not as word-to-word as given in the model answer scheme.
STATICS. Friction VECTOR MECHANICS FOR ENGINEERS: Eighth Edition CHAPTER. Ferdinand P. Beer E. Russell Johnston, Jr.
 Eighth E 8 Friction CHAPTER VECTOR MECHANICS FOR ENGINEERS: STATICS Ferdinand P. Beer E. Russell Johnston, Jr. Lecture Notes: J. Walt Oler Texas Tech University Contents Introduction Laws of Dry Friction.
Eighth E 8 Friction CHAPTER VECTOR MECHANICS FOR ENGINEERS: STATICS Ferdinand P. Beer E. Russell Johnston, Jr. Lecture Notes: J. Walt Oler Texas Tech University Contents Introduction Laws of Dry Friction.
Equilibrium of Rigid Bodies
 Equilibrium of Rigid Bodies 1 2 Contents Introduction Free-Bod Diagram Reactions at Supports and Connections for a wo-dimensional Structure Equilibrium of a Rigid Bod in wo Dimensions Staticall Indeterminate
Equilibrium of Rigid Bodies 1 2 Contents Introduction Free-Bod Diagram Reactions at Supports and Connections for a wo-dimensional Structure Equilibrium of a Rigid Bod in wo Dimensions Staticall Indeterminate
5.2 Rigid Bodies and Two-Dimensional Force Systems
 5.2 Rigid odies and Two-Dimensional Force Systems 5.2 Rigid odies and Two-Dimensional Force Systems Procedures and Strategies, page 1 of 1 Procedures and Strategies for Solving Problems Involving Equilibrium
5.2 Rigid odies and Two-Dimensional Force Systems 5.2 Rigid odies and Two-Dimensional Force Systems Procedures and Strategies, page 1 of 1 Procedures and Strategies for Solving Problems Involving Equilibrium
SOLUTION 8 1. a+ M B = 0; N A = 0. N A = kn = 16.5 kn. Ans. + c F y = 0; N B = 0
 8 1. The mine car and its contents have a total mass of 6 Mg and a center of gravity at G. If the coefficient of static friction between the wheels and the tracks is m s = 0.4 when the wheels are locked,
8 1. The mine car and its contents have a total mass of 6 Mg and a center of gravity at G. If the coefficient of static friction between the wheels and the tracks is m s = 0.4 when the wheels are locked,
ENGR-1100 Introduction to Engineering Analysis. Lecture 13
 ENGR-1100 Introduction to Engineering Analysis Lecture 13 EQUILIBRIUM OF A RIGID BODY & FREE-BODY DIAGRAMS Today s Objectives: Students will be able to: a) Identify support reactions, and, b) Draw a free-body
ENGR-1100 Introduction to Engineering Analysis Lecture 13 EQUILIBRIUM OF A RIGID BODY & FREE-BODY DIAGRAMS Today s Objectives: Students will be able to: a) Identify support reactions, and, b) Draw a free-body
5. Plane Kinetics of Rigid Bodies
 5. Plane Kinetics of Rigid Bodies 5.1 Mass moments of inertia 5.2 General equations of motion 5.3 Translation 5.4 Fixed axis rotation 5.5 General plane motion 5.6 Work and energy relations 5.7 Impulse
5. Plane Kinetics of Rigid Bodies 5.1 Mass moments of inertia 5.2 General equations of motion 5.3 Translation 5.4 Fixed axis rotation 5.5 General plane motion 5.6 Work and energy relations 5.7 Impulse
The case where there is no net effect of the forces acting on a rigid body
 The case where there is no net effect of the forces acting on a rigid body Outline: Introduction and Definition of Equilibrium Equilibrium in Two-Dimensions Special cases Equilibrium in Three-Dimensions
The case where there is no net effect of the forces acting on a rigid body Outline: Introduction and Definition of Equilibrium Equilibrium in Two-Dimensions Special cases Equilibrium in Three-Dimensions
ENGINEERING MECHANICS - Question Bank
 E Semester-_IST YEAR (CIVIL, MECH, AUTO, CHEM, RUER, PLASTIC, ENV,TT,AERO) ENGINEERING MECHANICS - Question ank All questions carry equal marks(10 marks) Q.1 Define space,time matter and force, scalar
E Semester-_IST YEAR (CIVIL, MECH, AUTO, CHEM, RUER, PLASTIC, ENV,TT,AERO) ENGINEERING MECHANICS - Question ank All questions carry equal marks(10 marks) Q.1 Define space,time matter and force, scalar
Chapter 5. The Laws of Motion
 Chapter 5 The Laws of Motion Sir Isaac Newton 1642 1727 Formulated basic laws of mechanics Discovered Law of Universal Gravitation Invented form of calculus Many observations dealing with light and optics
Chapter 5 The Laws of Motion Sir Isaac Newton 1642 1727 Formulated basic laws of mechanics Discovered Law of Universal Gravitation Invented form of calculus Many observations dealing with light and optics
five moments ELEMENTS OF ARCHITECTURAL STRUCTURES: FORM, BEHAVIOR, AND DESIGN DR. ANNE NICHOLS SPRING 2014 lecture ARCH 614
 ELEMENTS OF ARCHITECTURAL STRUCTURES: FORM, BEHAVIOR, AND DESIGN DR. ANNE NICHOLS SPRING 2014 lecture five moments Moments 1 Moments forces have the tendency to make a body rotate about an axis http://www.physics.umd.edu
ELEMENTS OF ARCHITECTURAL STRUCTURES: FORM, BEHAVIOR, AND DESIGN DR. ANNE NICHOLS SPRING 2014 lecture five moments Moments 1 Moments forces have the tendency to make a body rotate about an axis http://www.physics.umd.edu
5 Equilibrium of a Rigid Body Chapter Objectives
 5 Equilibrium of a Rigid Body Chapter Objectives Develop the equations of equilibrium for a rigid body Concept of the free-body diagram for a rigid body Solve rigid-body equilibrium problems using the
5 Equilibrium of a Rigid Body Chapter Objectives Develop the equations of equilibrium for a rigid body Concept of the free-body diagram for a rigid body Solve rigid-body equilibrium problems using the
When a rigid body is in equilibrium, both the resultant force and the resultant couple must be zero.
 When a rigid body is in equilibrium, both the resultant force and the resultant couple must be zero. 0 0 0 0 k M j M i M M k R j R i R F R z y x z y x Forces and moments acting on a rigid body could be
When a rigid body is in equilibrium, both the resultant force and the resultant couple must be zero. 0 0 0 0 k M j M i M M k R j R i R F R z y x z y x Forces and moments acting on a rigid body could be
1. Replace the given system of forces acting on a body as shown in figure 1 by a single force and couple acting at the point A.
 Code No: Z0321 / R07 Set No. 1 I B.Tech - Regular Examinations, June 2009 CLASSICAL MECHANICS ( Common to Mechanical Engineering, Chemical Engineering, Mechatronics, Production Engineering and Automobile
Code No: Z0321 / R07 Set No. 1 I B.Tech - Regular Examinations, June 2009 CLASSICAL MECHANICS ( Common to Mechanical Engineering, Chemical Engineering, Mechatronics, Production Engineering and Automobile
Eng Sample Test 4
 1. An adjustable tow bar connecting the tractor unit H with the landing gear J of a large aircraft is shown in the figure. Adjusting the height of the hook F at the end of the tow bar is accomplished by
1. An adjustable tow bar connecting the tractor unit H with the landing gear J of a large aircraft is shown in the figure. Adjusting the height of the hook F at the end of the tow bar is accomplished by
where G is called the universal gravitational constant.
 UNIT-I BASICS & STATICS OF PARTICLES 1. What are the different laws of mechanics? First law: A body does not change its state of motion unless acted upon by a force or Every object in a state of uniform
UNIT-I BASICS & STATICS OF PARTICLES 1. What are the different laws of mechanics? First law: A body does not change its state of motion unless acted upon by a force or Every object in a state of uniform
Statics: Lecture Notes for Sections 10.1,10.2,10.3 1
 Chapter 10 MOMENTS of INERTIA for AREAS, RADIUS OF GYRATION Today s Objectives: Students will be able to: a) Define the moments of inertia (MoI) for an area. b) Determine the MoI for an area by integration.
Chapter 10 MOMENTS of INERTIA for AREAS, RADIUS OF GYRATION Today s Objectives: Students will be able to: a) Define the moments of inertia (MoI) for an area. b) Determine the MoI for an area by integration.
EQUATIONS OF EQUILIBRIUM & TWO-AND THREE-FORCE MEMEBERS
 EQUATIONS OF EQUILIBRIUM & TWO-AND THREE-FORCE MEMEBERS Today s Objectives: Students will be able to: a) Apply equations of equilibrium to solve for unknowns, and, b) Recognize two-force members. READING
EQUATIONS OF EQUILIBRIUM & TWO-AND THREE-FORCE MEMEBERS Today s Objectives: Students will be able to: a) Apply equations of equilibrium to solve for unknowns, and, b) Recognize two-force members. READING
2015 ENGINEERING MECHANICS
 Set No - 1 I B.Tech I Semester Regular/Supple. Examinations Nov./Dec. 2015 ENGINEERING MECHANICS (Common to CE, ME, CSE, PCE, IT, Chem. E, Aero E, AME, Min E, PE, Metal E, Textile Engg.) Time: 3 hours
Set No - 1 I B.Tech I Semester Regular/Supple. Examinations Nov./Dec. 2015 ENGINEERING MECHANICS (Common to CE, ME, CSE, PCE, IT, Chem. E, Aero E, AME, Min E, PE, Metal E, Textile Engg.) Time: 3 hours
Sports biomechanics explores the relationship between the body motion, internal forces and external forces to optimize the sport performance.
 What is biomechanics? Biomechanics is the field of study that makes use of the laws of physics and engineering concepts to describe motion of body segments, and the internal and external forces, which
What is biomechanics? Biomechanics is the field of study that makes use of the laws of physics and engineering concepts to describe motion of body segments, and the internal and external forces, which
6.6 FRAMES AND MACHINES APPLICATIONS. Frames are commonly used to support various external loads.
 6.6 FRAMES AND MACHINES APPLICATIONS Frames are commonly used to support various external loads. How is a frame different than a truss? How can you determine the forces at the joints and supports of a
6.6 FRAMES AND MACHINES APPLICATIONS Frames are commonly used to support various external loads. How is a frame different than a truss? How can you determine the forces at the joints and supports of a
Equilibrium. Rigid Bodies VECTOR MECHANICS FOR ENGINEERS: STATICS. Eighth Edition CHAPTER. Ferdinand P. Beer E. Russell Johnston, Jr.
 Eighth E 4 Equilibrium CHAPTER VECTOR MECHANICS FOR ENGINEERS: STATICS Ferdinand P. Beer E. Russell Johnston, Jr. Lecture Notes: J. Walt Oler Texas Tech University of Rigid Bodies Contents Introduction
Eighth E 4 Equilibrium CHAPTER VECTOR MECHANICS FOR ENGINEERS: STATICS Ferdinand P. Beer E. Russell Johnston, Jr. Lecture Notes: J. Walt Oler Texas Tech University of Rigid Bodies Contents Introduction
Final Exam - Spring
 EM121 Final Exam - Spring 2011-2012 Name : Section Number : Record all your answers to the multiple choice problems (1-15) by filling in the appropriate circle. All multiple choice answers will be graded
EM121 Final Exam - Spring 2011-2012 Name : Section Number : Record all your answers to the multiple choice problems (1-15) by filling in the appropriate circle. All multiple choice answers will be graded
CEE 271: Applied Mechanics II, Dynamics Lecture 25: Ch.17, Sec.4-5
 1 / 36 CEE 271: Applied Mechanics II, Dynamics Lecture 25: Ch.17, Sec.4-5 Prof. Albert S. Kim Civil and Environmental Engineering, University of Hawaii at Manoa Date: 2 / 36 EQUATIONS OF MOTION: ROTATION
1 / 36 CEE 271: Applied Mechanics II, Dynamics Lecture 25: Ch.17, Sec.4-5 Prof. Albert S. Kim Civil and Environmental Engineering, University of Hawaii at Manoa Date: 2 / 36 EQUATIONS OF MOTION: ROTATION
Determine the resultant internal loadings acting on the cross section at C of the beam shown in Fig. 1 4a.
 E X M P L E 1.1 Determine the resultant internal loadings acting on the cross section at of the beam shown in Fig. 1 a. 70 N/m m 6 m Fig. 1 Support Reactions. This problem can be solved in the most direct
E X M P L E 1.1 Determine the resultant internal loadings acting on the cross section at of the beam shown in Fig. 1 a. 70 N/m m 6 m Fig. 1 Support Reactions. This problem can be solved in the most direct
SIMPLIFICATION OF FORCE AND COUPLE SYSTEMS & THEIR FURTHER SIMPLIFICATION
 SIMPLIFICATION OF FORCE AND COUPLE SYSTEMS & THEIR FURTHER SIMPLIFICATION Today s Objectives: Students will be able to: a) Determine the effect of moving a force. b) Find an equivalent force-couple system
SIMPLIFICATION OF FORCE AND COUPLE SYSTEMS & THEIR FURTHER SIMPLIFICATION Today s Objectives: Students will be able to: a) Determine the effect of moving a force. b) Find an equivalent force-couple system
.VALLIAMMAI ENGINEERING COLLEGE
 .VALLIAMMAI ENGINEERING COLLEGE SRM Nagar, Kattankulathur 603 203 DEPARTMENT OF GENERAL ENGINEERING QUESTION BANK II SEMESTER GE 8292- Engineering Mechanics Regulation 2017 Academic Year 2017 18 VALLIAMMAI
.VALLIAMMAI ENGINEERING COLLEGE SRM Nagar, Kattankulathur 603 203 DEPARTMENT OF GENERAL ENGINEERING QUESTION BANK II SEMESTER GE 8292- Engineering Mechanics Regulation 2017 Academic Year 2017 18 VALLIAMMAI
Engineering Mechanics Statics
 Mechanical Systems Engineering_2016 Engineering Mechanics Statics 6. Moment of a Couple Dr. Rami Zakaria Moment of a Couple We need a moment (or torque) of (12 N m) to rotate the wheel. Notice that one
Mechanical Systems Engineering_2016 Engineering Mechanics Statics 6. Moment of a Couple Dr. Rami Zakaria Moment of a Couple We need a moment (or torque) of (12 N m) to rotate the wheel. Notice that one
ME 201 Engineering Mechanics: Statics. Final Exam Review
 ME 201 Engineering Mechanics: Statics inal Exam Review inal Exam Testing Center (Proctored, 1 attempt) Opens: Monday, April 9 th Closes : riday, April 13 th Test ormat 15 Problems 10 Multiple Choice (75%)
ME 201 Engineering Mechanics: Statics inal Exam Review inal Exam Testing Center (Proctored, 1 attempt) Opens: Monday, April 9 th Closes : riday, April 13 th Test ormat 15 Problems 10 Multiple Choice (75%)
Vidyalanakar F.Y. Diploma : Sem. II [AE/CE/CH/CR/CS/CV/EE/EP/FE/ME/MH/MI/PG/PT/PS] Engineering Mechanics
![Vidyalanakar F.Y. Diploma : Sem. II [AE/CE/CH/CR/CS/CV/EE/EP/FE/ME/MH/MI/PG/PT/PS] Engineering Mechanics](/thumbs/77/74871041.jpg "Vidyalanakar F.Y. Diploma : Sem. II [AE/CE/CH/CR/CS/CV/EE/EP/FE/ME/MH/MI/PG/PT/PS] Engineering Mechanics") Vidyalanakar F.Y. Diploma : Sem. II [AE/CE/CH/CR/CS/CV/EE/EP/FE/ME/MH/MI/PG/PT/PS] Engineering Mechanics Time : 3 Hrs.] Prelim Question Paper Solution [Marks : 100 Q.1 Attempt any TEN of the following
Vidyalanakar F.Y. Diploma : Sem. II [AE/CE/CH/CR/CS/CV/EE/EP/FE/ME/MH/MI/PG/PT/PS] Engineering Mechanics Time : 3 Hrs.] Prelim Question Paper Solution [Marks : 100 Q.1 Attempt any TEN of the following
FRAMES AND MACHINES Learning Objectives 1). To evaluate the unknown reactions at the supports and the interaction forces at the connection points of a
. To evaluate the unknown reactions at the supports and the interaction forces at the connection points of a") FRAMES AND MACHINES Learning Objectives 1). To evaluate the unknown reactions at the supports and the interaction forces at the connection points of a rigid frame in equilibrium by solving the equations
FRAMES AND MACHINES Learning Objectives 1). To evaluate the unknown reactions at the supports and the interaction forces at the connection points of a rigid frame in equilibrium by solving the equations
STATICS & DYNAMICS. Engineering Mechanics. Gary L. Gray. Francesco Costanzo. Michael E. Plesha. University of Wisconsin-Madison
 Engineering Mechanics STATICS & DYNAMICS SECOND EDITION Francesco Costanzo Department of Engineering Science and Mechanics Penn State University Michael E. Plesha Department of Engineering Physics University
Engineering Mechanics STATICS & DYNAMICS SECOND EDITION Francesco Costanzo Department of Engineering Science and Mechanics Penn State University Michael E. Plesha Department of Engineering Physics University
Ishik University / Sulaimani Architecture Department. Structure. ARCH 214 Chapter -5- Equilibrium of a Rigid Body
 Ishik University / Sulaimani Architecture Department 1 Structure ARCH 214 Chapter -5- Equilibrium of a Rigid Body CHAPTER OBJECTIVES To develop the equations of equilibrium for a rigid body. To introduce
Ishik University / Sulaimani Architecture Department 1 Structure ARCH 214 Chapter -5- Equilibrium of a Rigid Body CHAPTER OBJECTIVES To develop the equations of equilibrium for a rigid body. To introduce
MOMENTS OF INERTIA FOR AREAS, RADIUS OF GYRATION OF AN AREA, & MOMENTS OF INTERTIA BY INTEGRATION
 MOMENTS OF INERTIA FOR AREAS, RADIUS OF GYRATION OF AN AREA, & MOMENTS OF INTERTIA BY INTEGRATION Today s Objectives: Students will be able to: a) Define the moments of inertia (MoI) for an area. b) Determine
MOMENTS OF INERTIA FOR AREAS, RADIUS OF GYRATION OF AN AREA, & MOMENTS OF INTERTIA BY INTEGRATION Today s Objectives: Students will be able to: a) Define the moments of inertia (MoI) for an area. b) Determine
1. The horizontal beam represented in Examination Figure 6 carries three loads P 1. and R 2
 Student ID: 52573847 Exam: 286037RR - Engineering Mechanics, Part 2 When you have completed your exam and reviewed your answers, click Submit Exam. Answers will not be recorded until you hit Submit Exam.
Student ID: 52573847 Exam: 286037RR - Engineering Mechanics, Part 2 When you have completed your exam and reviewed your answers, click Submit Exam. Answers will not be recorded until you hit Submit Exam.
three Equilibrium 1 and planar trusses ELEMENTS OF ARCHITECTURAL STRUCTURES: FORM, BEHAVIOR, AND DESIGN DR. ANNE NICHOLS SPRING 2015 lecture ARCH 614
 ELEMENTS OF ARCHITECTURAL STRUCTURES: FORM, BEHAVIOR, AND DESIGN DR. ANNE NICHOLS SPRING 2015 lecture three equilibrium and planar trusses Equilibrium 1 Equilibrium balanced steady resultant of forces
ELEMENTS OF ARCHITECTURAL STRUCTURES: FORM, BEHAVIOR, AND DESIGN DR. ANNE NICHOLS SPRING 2015 lecture three equilibrium and planar trusses Equilibrium 1 Equilibrium balanced steady resultant of forces
Spring 2018 Lecture 28 Exam Review
 Statics - TAM 210 & TAM 211 Spring 2018 Lecture 28 Exam Review Announcements Concept Inventory: Ungraded assessment of course knowledge Extra credit: Complete #1 or #2 for 0.5 out of 100 pt of final grade
Statics - TAM 210 & TAM 211 Spring 2018 Lecture 28 Exam Review Announcements Concept Inventory: Ungraded assessment of course knowledge Extra credit: Complete #1 or #2 for 0.5 out of 100 pt of final grade
two forces and moments Structural Math Physics for Structures Structural Math
 RHITETURL STRUTURES: ORM, EHVIOR, ND DESIGN DR. NNE NIHOLS SUMMER 05 lecture two forces and moments orces & Moments rchitectural Structures 009abn Structural Math quantify environmental loads how big is
RHITETURL STRUTURES: ORM, EHVIOR, ND DESIGN DR. NNE NIHOLS SUMMER 05 lecture two forces and moments orces & Moments rchitectural Structures 009abn Structural Math quantify environmental loads how big is
2. a) Explain the equilibrium of i) Concurrent force system, and ii) General force system.
 Explain the equilibrium of i) Concurrent force system, and ii) General force system.") Code No: R21031 R10 SET - 1 II B. Tech I Semester Supplementary Examinations Dec 2013 ENGINEERING MECHANICS (Com to ME, AE, AME, MM) Time: 3 hours Max. Marks: 75 Answer any FIVE Questions All Questions
Code No: R21031 R10 SET - 1 II B. Tech I Semester Supplementary Examinations Dec 2013 ENGINEERING MECHANICS (Com to ME, AE, AME, MM) Time: 3 hours Max. Marks: 75 Answer any FIVE Questions All Questions
CHAPTER 2: EQUILIBRIUM OF RIGID BODIES
 For a rigid body to be in equilibrium, the net force as well as the net moment about any arbitrary point O must be zero Summation of all external forces. Equilibrium: Sum of moments of all external forces.
For a rigid body to be in equilibrium, the net force as well as the net moment about any arbitrary point O must be zero Summation of all external forces. Equilibrium: Sum of moments of all external forces.
Physics, Chapter 3: The Equilibrium of a Particle
 University of Nebraska - Lincoln DigitalCommons@University of Nebraska - Lincoln Robert Katz Publications Research Papers in Physics and Astronomy 1-1958 Physics, Chapter 3: The Equilibrium of a Particle
University of Nebraska - Lincoln DigitalCommons@University of Nebraska - Lincoln Robert Katz Publications Research Papers in Physics and Astronomy 1-1958 Physics, Chapter 3: The Equilibrium of a Particle
K.GNANASEKARAN. M.E.,M.B.A.,(Ph.D)
") DEPARTMENT OF MECHANICAL ENGG. Engineering Mechanics I YEAR 2th SEMESTER) Two Marks Question Bank UNIT-I Basics and statics of particles 1. Define Engineering Mechanics Engineering Mechanics is defined
DEPARTMENT OF MECHANICAL ENGG. Engineering Mechanics I YEAR 2th SEMESTER) Two Marks Question Bank UNIT-I Basics and statics of particles 1. Define Engineering Mechanics Engineering Mechanics is defined
Unit 1. (a) tan α = (b) tan α = (c) tan α = (d) tan α =
 tan α = (b) tan α = (c) tan α = (d) tan α =") Unit 1 1. The subjects Engineering Mechanics deals with (a) Static (b) kinematics (c) Kinetics (d) All of the above 2. If the resultant of two forces P and Q is acting at an angle α with P, then (a) tan
Unit 1 1. The subjects Engineering Mechanics deals with (a) Static (b) kinematics (c) Kinetics (d) All of the above 2. If the resultant of two forces P and Q is acting at an angle α with P, then (a) tan
Engineering Mechanics: Statics
 Engineering Mechanics: Statics Chapter 6B: Applications of Friction in Machines Wedges Used to produce small position adjustments of a body or to apply large forces When sliding is impending, the resultant
Engineering Mechanics: Statics Chapter 6B: Applications of Friction in Machines Wedges Used to produce small position adjustments of a body or to apply large forces When sliding is impending, the resultant
e14 - applied mechanics: statics e14 - applied mechanics: statics mon/wed/fri, 12:50-2:05pm, syllabus e14 - applied mechanics: statics
 e14 - applied mechanics: statics e14 - applied mechanics: statics mon/wed/fri, 12:50-2:05pm, 370-3701 e14 - applied mechanics: statics regular final mon, 06/06/11, 8:30-10:30am, 120 min, cubaud regular
e14 - applied mechanics: statics e14 - applied mechanics: statics mon/wed/fri, 12:50-2:05pm, 370-3701 e14 - applied mechanics: statics regular final mon, 06/06/11, 8:30-10:30am, 120 min, cubaud regular
EQUATIONS OF EQUILIBRIUM & TWO- AND THREE-FORCE MEMEBERS
 EQUATIONS OF EQUILIBRIUM & TWO- AND THREE-FORCE MEMEBERS Today s Objectives: Students will be able to: a) Apply equations of equilibrium to solve for unknowns, and, b) Recognize two-force members. In-Class
EQUATIONS OF EQUILIBRIUM & TWO- AND THREE-FORCE MEMEBERS Today s Objectives: Students will be able to: a) Apply equations of equilibrium to solve for unknowns, and, b) Recognize two-force members. In-Class
Consider the case of a 100 N. mass on a horizontal surface as shown below:
 1.9.1 Introduction The study of friction is called: The force of friction is defined as: The force of friction acting between two surfaces has three properties: i) ii) iii) Consider the case of a 100 N.
1.9.1 Introduction The study of friction is called: The force of friction is defined as: The force of friction acting between two surfaces has three properties: i) ii) iii) Consider the case of a 100 N.
Engineering Mechanics: Statics in SI Units, 12e
 Engineering Mechanics: Statics in SI Units, 12e 3 Equilibrium of a Particle Chapter Objectives To introduce the concept of the free-body diagram for a particle To show how to solve particle equilibrium
Engineering Mechanics: Statics in SI Units, 12e 3 Equilibrium of a Particle Chapter Objectives To introduce the concept of the free-body diagram for a particle To show how to solve particle equilibrium
Chapter 5. The Laws of Motion
 Chapter 5 The Laws of Motion The Laws of Motion The description of an object in There was no consideration of what might influence that motion. Two main factors need to be addressed to answer questions
Chapter 5 The Laws of Motion The Laws of Motion The description of an object in There was no consideration of what might influence that motion. Two main factors need to be addressed to answer questions
1. Draw a FBD of the toy plane if it is suspended from a string while you hold the string and move across the room at a constant velocity.
 1. Draw a FBD of the toy plane if it is suspended from a string while you hold the string and move across the room at a constant velocity. 2. A 15 kg bag of bananas hangs from a taunt line strung between
1. Draw a FBD of the toy plane if it is suspended from a string while you hold the string and move across the room at a constant velocity. 2. A 15 kg bag of bananas hangs from a taunt line strung between
ISBN :
 ISBN : 978-81-909042-4-7 - www.airwalkpublications.com ANNA UNIVERSITY - R2013 GE6253 ENGINEERING MECHANICS UNIT I: BASICS AND STATICS OF PARTICLES 12 Introduction Units and Dimensions Laws of Mechanics
ISBN : 978-81-909042-4-7 - www.airwalkpublications.com ANNA UNIVERSITY - R2013 GE6253 ENGINEERING MECHANICS UNIT I: BASICS AND STATICS OF PARTICLES 12 Introduction Units and Dimensions Laws of Mechanics
The Concept of Force Newton s First Law and Inertial Frames Mass Newton s Second Law The Gravitational Force and Weight Newton s Third Law Analysis
 The Laws of Motion The Concept of Force Newton s First Law and Inertial Frames Mass Newton s Second Law The Gravitational Force and Weight Newton s Third Law Analysis Models using Newton s Second Law Forces
The Laws of Motion The Concept of Force Newton s First Law and Inertial Frames Mass Newton s Second Law The Gravitational Force and Weight Newton s Third Law Analysis Models using Newton s Second Law Forces
Chapter 6: Structural Analysis
 Chapter 6: Structural Analysis Chapter Objectives To show how to determine the forces in the members of a truss using the method of joints and the method of sections. To analyze the forces acting on the
Chapter 6: Structural Analysis Chapter Objectives To show how to determine the forces in the members of a truss using the method of joints and the method of sections. To analyze the forces acting on the
MEE224: Engineering Mechanics Lecture 4
 Lecture 4: Structural Analysis Part 1: Trusses So far we have only analysed forces and moments on a single rigid body, i.e. bars. Remember that a structure is a formed by and this lecture will investigate
Lecture 4: Structural Analysis Part 1: Trusses So far we have only analysed forces and moments on a single rigid body, i.e. bars. Remember that a structure is a formed by and this lecture will investigate
Engineering Mechanics: Statics
 Engineering Mechanics: Statics Chapter 6B: Applications of Friction in Machines Wedges Used to produce small position adjustments of a body or to apply large forces When sliding is impending, the resultant
Engineering Mechanics: Statics Chapter 6B: Applications of Friction in Machines Wedges Used to produce small position adjustments of a body or to apply large forces When sliding is impending, the resultant
CHAPTER 4 NEWTON S LAWS OF MOTION
 62 CHAPTER 4 NEWTON S LAWS O MOTION CHAPTER 4 NEWTON S LAWS O MOTION 63 Up to now we have described the motion of particles using quantities like displacement, velocity and acceleration. These quantities
62 CHAPTER 4 NEWTON S LAWS O MOTION CHAPTER 4 NEWTON S LAWS O MOTION 63 Up to now we have described the motion of particles using quantities like displacement, velocity and acceleration. These quantities
BE Semester- I ( ) Question Bank (MECHANICS OF SOLIDS)
 Question Bank (MECHANICS OF SOLIDS)") BE Semester- I ( ) Question Bank (MECHANICS OF SOLIDS) All questions carry equal marks(10 marks) Q.1 (a) Write the SI units of following quantities and also mention whether it is scalar or vector: (i)
BE Semester- I ( ) Question Bank (MECHANICS OF SOLIDS) All questions carry equal marks(10 marks) Q.1 (a) Write the SI units of following quantities and also mention whether it is scalar or vector: (i)
Physics 101 Lecture 5 Newton`s Laws
 Physics 101 Lecture 5 Newton`s Laws Dr. Ali ÖVGÜN EMU Physics Department The Laws of Motion q Newton s first law q Force q Mass q Newton s second law q Newton s third law qfrictional forces q Examples
Physics 101 Lecture 5 Newton`s Laws Dr. Ali ÖVGÜN EMU Physics Department The Laws of Motion q Newton s first law q Force q Mass q Newton s second law q Newton s third law qfrictional forces q Examples
Chapter 5: Equilibrium of a Rigid Body
 Chapter 5: Equilibrium of a Rigid Body Chapter Objectives To develop the equations of equilibrium for a rigid body. To introduce the concept of a free-body diagram for a rigid body. To show how to solve
Chapter 5: Equilibrium of a Rigid Body Chapter Objectives To develop the equations of equilibrium for a rigid body. To introduce the concept of a free-body diagram for a rigid body. To show how to solve
PART-A. a. 60 N b. -60 N. c. 30 N d. 120 N. b. How you can get direction of Resultant R when number of forces acting on a particle in plane.
 V.S.. ENGINEERING OLLEGE, KRUR EPRTMENT OF MEHNIL ENGINEERING EMI YER: 2009-2010 (EVEN SEMESTER) ENGINEERING MEHNIS (MEH II SEM) QUESTION NK UNIT I PRT- EM QUESTION NK 1. efine Mechanics 2. What is meant
V.S.. ENGINEERING OLLEGE, KRUR EPRTMENT OF MEHNIL ENGINEERING EMI YER: 2009-2010 (EVEN SEMESTER) ENGINEERING MEHNIS (MEH II SEM) QUESTION NK UNIT I PRT- EM QUESTION NK 1. efine Mechanics 2. What is meant
3.1 CONDITIONS FOR RIGID-BODY EQUILIBRIUM
 3.1 CONDITIONS FOR RIGID-BODY EQUILIBRIUM Consider rigid body fixed in the x, y and z reference and is either at rest or moves with reference at constant velocity Two types of forces that act on it, the
3.1 CONDITIONS FOR RIGID-BODY EQUILIBRIUM Consider rigid body fixed in the x, y and z reference and is either at rest or moves with reference at constant velocity Two types of forces that act on it, the
EQUATIONS OF MOTION: RECTANGULAR COORDINATES
 EQUATIONS OF MOTION: RECTANGULAR COORDINATES Today s Objectives: Students will be able to: 1. Apply Newton s second law to determine forces and accelerations for particles in rectilinear motion. In-Class
EQUATIONS OF MOTION: RECTANGULAR COORDINATES Today s Objectives: Students will be able to: 1. Apply Newton s second law to determine forces and accelerations for particles in rectilinear motion. In-Class
If the solution does not follow a logical thought process, it will be assumed in error.
 Please review the following statement: I certify that I have not given unauthorized aid nor have I received aid in the completion of this exam. If I detect cheating I will write a note on my exam and raise
Please review the following statement: I certify that I have not given unauthorized aid nor have I received aid in the completion of this exam. If I detect cheating I will write a note on my exam and raise