Methods of Data Assimilation and Comparisons for Lagrangian Data
|
|
|
- Hugh Hawkins
- 5 years ago
- Views:
Transcription
1 Methods of Data Assimilation and Comparisons for Lagrangian Data Chris Jones, Warwick and UNC-CH Kayo Ide, UCLA Andrew Stuart, Jochen Voss, Warwick Guillaume Vernieres, UNC-CH Amarjit Budiraja, UNC-CH Elaine Spiller, SAMSI Amit Apte, TIFR Bangalore Supported by the Office of Naval Research
2 DATA: ever-improving experimental technology has led to vast amounts of accumulated data MODEL: ever-increasing computational capacity has led to greater model capability and output Scientific imperative: bring data and computations together to work in harmony to enhance prediction and estimation

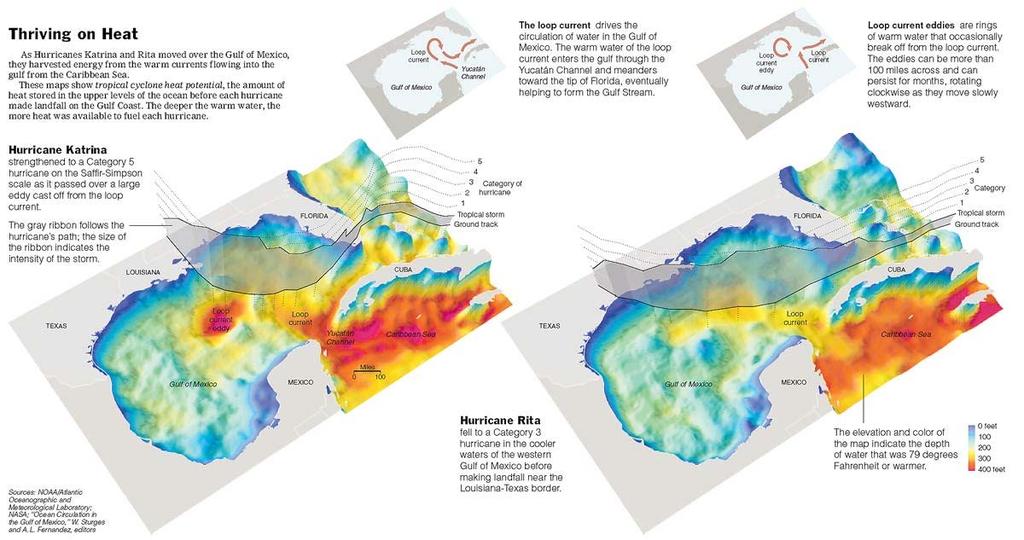
3 Eddies in the Gulf
4 t = t 0 x ( t ), x ( t ) t t t = t 1 State estimate: x ( t ), x ( t ), P ( t ) a a a Model forecast: x ( t ), x ( t ), P ( t ) f f f Initial conditions: f f f x ( t ), x ( t ) t t x ( t ), x ( t ), P ( t ) Measurement: y ( t ) = x ( t ) + ε o t Gain Matrix
5 Sequential Data Assimilation Model + observations prediction t 0 model t1 t2 model t N obs update obs update interpolation interpolation
 (, ) prognos t t d = M(, t) dt + ( t) dt x x η T E[ η( t) η ( t')] = δ ( t t') Q( t) tic model actual evolution covariance of the model residual Observations: o t y i = H i[ xi] +")
6 Ocean model: x R N f f dx = M x t dt state vector comprising all relevant dynamical variables (e.g. flow velocity, temperature, salinity, etc. at each grid point) (, ) prognos t t d = M(, t) dt + ( t) dt x x η T E[ η( t) η ( t')] = δ ( t t') Q( t) tic model actual evolution covariance of the model residual Observations: o t y i = H i[ xi] + εi H ε i y i o i observation operator observation error R L T E[ εε ], i m im i typically L N = δ R observation error covariance
7 Kalman Filter Distributions are Gaussian Model is linear-tlm (EKF) or fit to Gaussian (EnKF)
8 Extended Kalman Filter Forecast model error covariance using tangent linear model: i P = E[ ΔxΔx ]; Δx x x f T f t f dp f f T = MP + P M + Q( t) dt M M x t x f (, )/ : linearized model operator a Combine mod el and observations into a new state minimizing tr i H x = x + K d d = y H ( x ) a f o f j j j j j j j j f T f 1 a f j = j j j j j + j j = j j j ( T ) ( ) K P H H P H R P I K H P H : linearized observation function i / x x P a j
9 Ensemble Kalman Filter (EnKF) Error covariance is predicted via solution of full nonlinear system for a Monte- Carlo ensemble of states Model forecast: x ( t ), y ( t ), j = 1, N f f j 1 j 1 E 1 1 x ( t ) x ( t ), y ( t ) y ( t ) NE NE f f f f 1 = j 1 1 = j 1 NE j= 1 NE j= 1 t t x t1 y t1 ( ), ( ) t t x t0 y t0 ( ), ( ) Initial conditions: x ( t ), y ( t ), j = 1, N f f j 0 j 0 E 1 1 x ( t ) x ( t ), y ( t ) y ( t ) NE NE f f f f 0 = j 0 0 = j 0 NE j= 1 NE j= 1
10 Update step in EnKF Kalman gain matrix is computed using error covariance matrix derived from the ensemble. Ensemble members are updated with noisy observations 1 1 x x P x x x x N N E E f f f f f f f = j = j j N j= 1 1 j 1 E N = E ( )( ) T d = y + ε H x E ε ε R o f T Ensemble of observations: j j ( j) [ j j ] = Update ensemble members: x = x + Kd a f j j j ( f T ) 1 f T K= PH HPH + R
11 Lagrangian Data Floats: subsurface, pressurized to stay at certain depth Drifters: on surface, drogued to reflect behavior under turbulent layer Floats drift Drifters float


12 RAFOS Floats Floats

13 Revealing Pathways Of interest: finding pathways for salty Mediterranean water to reach North Atlantic Thanks to Amy Bower


14 Drifters

15 DART project: Marie-Poulain et al. Drifter tracks
16 Augmented system Append equations for drifters (floats) x dx dt dx dt F = x D f F f D x = = M M -- augmented state vector f F( x F, t) -- flow equations f f D( xd, xf, t) -- tracer advection equation Apply filtering to augmented system
17 Two vortices, N=2, one tracer, L=1 z = 1, z = ζ = i Γ = 2π 1,2 Δ T = 1 σ = 0.04 ρ = 0.02
18 Two vortices, N=2, one tracer, L=1 z 1 z 2 ζ z = 1, z = ζ = i Γ = 2π 1,2 ΔT = 1.5 σ = 0.04 ρ = 0.02
19 t = t 0 x ( t ), x ( t ) t t t = t 1 State estimate: x ( t ), x ( t ), P ( t ) a a a Model forecast: x ( t ), x ( t ), P ( t ) f f f Initial conditions: f f f x ( t ), x ( t ) t t x ( t ), x ( t ), P ( t ) Bayes Measurement: y ( t ) = x ( t ) + ε o t posterior obs prior P ( x y) = P ( yx) P x ( )
: p x t p x t y")
 p( z, t ) dz But: computationally prohibitive, state ~ 6 10")
20 Forecast step: p( x, t ) p( x, t ) p ( Mp) 1 ( Qp ij ) + i = t x 2 x x i i j Bayes step (update/analysis): p x t p x t y o (, 1) (, 1 ) p( y x) p( x, t ) o o 1 1 y o 1 p( x, t ) = p( y z) p( z, t ) dz But: computationally prohibitive, state ~ 6 10
21 Particle Filter Elaine Spiller, Amarjit Budiraja, Kayo Ide, CJ Initialize particle cloud and evolve under noisy dynamics: N 500 Reinitialize by choosing best particles using weight forecast tracer location observed tracer location Horizontal: best particles. Vertical: number reinitialized
22 Correcting particle filter Issue: particle cloud pulls away from obs Exploit different time-scales of Eulerian and Lagrangian dynamics Backtrack two time steps and reinitialize: i. Cloud expansion using Gaussian ii. Redistribute along line toward and away from obs (directed doubling)

23 Results

24 Gulf of Mexico 3 active layer, reduced gravity Modeling of the loop current in the GoM Limited area model km Lagrangian vs Eulerian data
25 Twin Experiment: Control


26 Twin Experiment: Control
27 Synthetic observation: Fixed stations(u,v) Surface floats (x,y) Isopycnal floats (x,y,z)
")
28 Synthetic observation: 4 Fixed stations (u,v)
")
29 Synthetic observation: 4 Surface floats (x,y)
")
30 Synthetic observation: 4 Isopycnal floats (x,y,z)

31 Results: ssh field Isopycnal floats Surface drifters Fixed stations
32 Results: rms(truth-analysis) of interface s depths Interface between layer 1 and 2 EuDA (u,v) LaDA (x,y,z) LaDA (x,y) Interface between layer 2 and 3
 LaDA")
33 EuDA LaDA (x,y,h) LaDA (x,y)
34 Lagrangian DA and State Estimation Augmented model : dx dx F = M F F D D F dt dt, D ( x, t) ; = M ( x, x t) with initial conditions x ( x x ) 0 F(0), D(0) Observations : y i = x D ( t i ) + ξ i ; ξ i ~ N (0, R 2 ) at times (t 1,t 2, t m ) Goal : Estimate initial conditions x(0) using the observations Idea : Use Bayesian formulation and Langevin sampling Note: This is really hindcasting/nowcasting, not forecasting
35 Bayesian formulation prior Prior distribution: P ( x) from initial initial condition Observational likelihood: P obs ( y x) from (Lagrangian) data For example: obs 1 P ( y x) exp y Hx 2 2σ ( ) 2 Bayes rule: P posterior obs prior ( x y) P ( y x) P ( x) State estimation problem : Calculate the statistics (mean / variance) of the posterior distribution of initial conditions (assume a perfect model)
36 State Estimation Model runs + observations state estimate x 0 0 t t 1 t2 model model model t 3 + OBS t N ( ) xt N y( t0) y( t1) y( t2) y( t3) Bayes: posterior obs prior P ( x y) = P ( y x) P x ( ) y t N ( ) sample posterior } Model runs
37 Lagrangian DA and State Estimation State estimation is particularly appropriate for float data Natural to use an augmented state-space approach Obs are in a clearly defined low-dimensional subspace but encode key aspects of full dynamics, for instance large scale features
38 Model Problem for Lagrangian DA Linearized shallow water model: 2 mode approximation: u 0 Geostrophic mode with amplitude Inertial gravity mode that is time periodic k = l = m= 1
39 Augmented System obs at: tk = kδ k = 1,..., N with Gaussian errors uncorrelated and independent of each other
40 Experiments and Methods 1. Short trajectory 2. Long trajectory staying in cell 3. Trajectory crossing cell boundaries A. Langevin Stochastic DE B. Metropolis Adjusted Langevin Algorithm C. Random Walk Metropolis Hastings D. EnKF
41 Short Trajectory
42 Long Trajectory in Cell 3 observations sets, # of obs: Obs set 1: 100 Obs set 2: 20 Obs set 3: 6
43 Comparison MALA improves with increased number of observations (frequency kept same) but EnKF does not. Obs set 4, has same fequency as 3, but extends trajectory and makes 20 obs

44 Scatter Plots EnKF is handicapped by trying to effectively approximate by a Gaussian and thus not accounting for nonlinear effects
45 Trajectory crossing cell boundary
46 Scatter Plots
47 Advantages of Langevin sampling Smoothing technique Works for nonlinear evolution Both the prior and observational distributions can be non-gaussian
48 Conclusions LaDa works and reveals saddle problem, but saddles are crucial due to directed launch strategy Effective approaches to saddle problem (EnKF, Langevin sampling) are emerging Statistical sampling has edge in cases it can be applied, but not developed for high-dimensions. Nonlinearity in statistical filtering approach is well addressed, but saddle issue is not resolved Filtering vs. smoothing is a significant debate because of chaotic effects
Lagrangian Data Assimilation and Its Application to Geophysical Fluid Flows
 Lagrangian Data Assimilation and Its Application to Geophysical Fluid Flows Laura Slivinski June, 3 Laura Slivinski (Brown University) Lagrangian Data Assimilation June, 3 / 3 Data Assimilation Setup:
Lagrangian Data Assimilation and Its Application to Geophysical Fluid Flows Laura Slivinski June, 3 Laura Slivinski (Brown University) Lagrangian Data Assimilation June, 3 / 3 Data Assimilation Setup:
Estimation of State Noise for the Ensemble Kalman filter algorithm for 2D shallow water equations.
 Estimation of State Noise for the Ensemble Kalman filter algorithm for 2D shallow water equations. May 6, 2009 Motivation Constitutive Equations EnKF algorithm Some results Method Navier Stokes equations
Estimation of State Noise for the Ensemble Kalman filter algorithm for 2D shallow water equations. May 6, 2009 Motivation Constitutive Equations EnKF algorithm Some results Method Navier Stokes equations
Lagrangian Data Assimilation and Manifold Detection for a Point-Vortex Model. David Darmon, AMSC Kayo Ide, AOSC, IPST, CSCAMM, ESSIC
 Lagrangian Data Assimilation and Manifold Detection for a Point-Vortex Model David Darmon, AMSC Kayo Ide, AOSC, IPST, CSCAMM, ESSIC Background Data Assimilation Iterative process Forecast Analysis Background
Lagrangian Data Assimilation and Manifold Detection for a Point-Vortex Model David Darmon, AMSC Kayo Ide, AOSC, IPST, CSCAMM, ESSIC Background Data Assimilation Iterative process Forecast Analysis Background
Lagrangian data assimilation for point vortex systems
 JOT J OURNAL OF TURBULENCE http://jot.iop.org/ Lagrangian data assimilation for point vortex systems Kayo Ide 1, Leonid Kuznetsov 2 and Christopher KRTJones 2 1 Department of Atmospheric Sciences and Institute
JOT J OURNAL OF TURBULENCE http://jot.iop.org/ Lagrangian data assimilation for point vortex systems Kayo Ide 1, Leonid Kuznetsov 2 and Christopher KRTJones 2 1 Department of Atmospheric Sciences and Institute
Ensemble Kalman Filter
 Ensemble Kalman Filter Geir Evensen and Laurent Bertino Hydro Research Centre, Bergen, Norway, Nansen Environmental and Remote Sensing Center, Bergen, Norway The Ensemble Kalman Filter (EnKF) Represents
Ensemble Kalman Filter Geir Evensen and Laurent Bertino Hydro Research Centre, Bergen, Norway, Nansen Environmental and Remote Sensing Center, Bergen, Norway The Ensemble Kalman Filter (EnKF) Represents
The Ensemble Kalman Filter:
 p.1 The Ensemble Kalman Filter: Theoretical formulation and practical implementation Geir Evensen Norsk Hydro Research Centre, Bergen, Norway Based on Evensen 23, Ocean Dynamics, Vol 53, No 4 p.2 The Ensemble
p.1 The Ensemble Kalman Filter: Theoretical formulation and practical implementation Geir Evensen Norsk Hydro Research Centre, Bergen, Norway Based on Evensen 23, Ocean Dynamics, Vol 53, No 4 p.2 The Ensemble
UNIVERSITY OF OKLAHOMA GRADUATE COLLEGE APPLICATION OF THE FORWARD SENSITIVITY METHOD TO DATA ASSIMILATION OF THE LAGRANGIAN TRACER DYNAMICS
 UNIVERSITY OF OKLAHOMA GRADUATE COLLEGE APPLICATION OF THE FORWARD SENSITIVITY METHOD TO DATA ASSIMILATION OF THE LAGRANGIAN TRACER DYNAMICS A DISSERTATION SUBMITTED TO THE GRADUATE FACULTY in partial
UNIVERSITY OF OKLAHOMA GRADUATE COLLEGE APPLICATION OF THE FORWARD SENSITIVITY METHOD TO DATA ASSIMILATION OF THE LAGRANGIAN TRACER DYNAMICS A DISSERTATION SUBMITTED TO THE GRADUATE FACULTY in partial
Modified particle filter methods for assimilating Lagrangian data into a point-vortex model
 Physica D 237 (2008) 1498 1506 www.elsevier.com/locate/physd Modified particle filter methods for assimilating Lagrangian data into a point-vortex model Elaine T. Spiller a,, Amarit Budhiraa b, Kayo Ide
Physica D 237 (2008) 1498 1506 www.elsevier.com/locate/physd Modified particle filter methods for assimilating Lagrangian data into a point-vortex model Elaine T. Spiller a,, Amarit Budhiraa b, Kayo Ide
Stochastic Collocation Methods for Polynomial Chaos: Analysis and Applications
 Stochastic Collocation Methods for Polynomial Chaos: Analysis and Applications Dongbin Xiu Department of Mathematics, Purdue University Support: AFOSR FA955-8-1-353 (Computational Math) SF CAREER DMS-64535
Stochastic Collocation Methods for Polynomial Chaos: Analysis and Applications Dongbin Xiu Department of Mathematics, Purdue University Support: AFOSR FA955-8-1-353 (Computational Math) SF CAREER DMS-64535
Bayesian Inverse problem, Data assimilation and Localization
 Bayesian Inverse problem, Data assimilation and Localization Xin T Tong National University of Singapore ICIP, Singapore 2018 X.Tong Localization 1 / 37 Content What is Bayesian inverse problem? What is
Bayesian Inverse problem, Data assimilation and Localization Xin T Tong National University of Singapore ICIP, Singapore 2018 X.Tong Localization 1 / 37 Content What is Bayesian inverse problem? What is
Lecture 2: From Linear Regression to Kalman Filter and Beyond
 Lecture 2: From Linear Regression to Kalman Filter and Beyond January 18, 2017 Contents 1 Batch and Recursive Estimation 2 Towards Bayesian Filtering 3 Kalman Filter and Bayesian Filtering and Smoothing
Lecture 2: From Linear Regression to Kalman Filter and Beyond January 18, 2017 Contents 1 Batch and Recursive Estimation 2 Towards Bayesian Filtering 3 Kalman Filter and Bayesian Filtering and Smoothing
Stability of Ensemble Kalman Filters
 Stability of Ensemble Kalman Filters Idrissa S. Amour, Zubeda Mussa, Alexander Bibov, Antti Solonen, John Bardsley, Heikki Haario and Tuomo Kauranne Lappeenranta University of Technology University of
Stability of Ensemble Kalman Filters Idrissa S. Amour, Zubeda Mussa, Alexander Bibov, Antti Solonen, John Bardsley, Heikki Haario and Tuomo Kauranne Lappeenranta University of Technology University of
Kalman Filter and Ensemble Kalman Filter
 Kalman Filter and Ensemble Kalman Filter 1 Motivation Ensemble forecasting : Provides flow-dependent estimate of uncertainty of the forecast. Data assimilation : requires information about uncertainty
Kalman Filter and Ensemble Kalman Filter 1 Motivation Ensemble forecasting : Provides flow-dependent estimate of uncertainty of the forecast. Data assimilation : requires information about uncertainty
Sampling the posterior: An approach to non-gaussian data assimilation
 Physica D 230 (2007) 50 64 www.elsevier.com/locate/physd Sampling the posterior: An approach to non-gaussian data assimilation A. Apte a, M. Hairer b, A.M. Stuart b,, J. Voss b a Department of Mathematics,
Physica D 230 (2007) 50 64 www.elsevier.com/locate/physd Sampling the posterior: An approach to non-gaussian data assimilation A. Apte a, M. Hairer b, A.M. Stuart b,, J. Voss b a Department of Mathematics,
Smoothers: Types and Benchmarks
 Smoothers: Types and Benchmarks Patrick N. Raanes Oxford University, NERSC 8th International EnKF Workshop May 27, 2013 Chris Farmer, Irene Moroz Laurent Bertino NERSC Geir Evensen Abstract Talk builds
Smoothers: Types and Benchmarks Patrick N. Raanes Oxford University, NERSC 8th International EnKF Workshop May 27, 2013 Chris Farmer, Irene Moroz Laurent Bertino NERSC Geir Evensen Abstract Talk builds
4. DATA ASSIMILATION FUNDAMENTALS
 4. DATA ASSIMILATION FUNDAMENTALS... [the atmosphere] "is a chaotic system in which errors introduced into the system can grow with time... As a consequence, data assimilation is a struggle between chaotic
4. DATA ASSIMILATION FUNDAMENTALS... [the atmosphere] "is a chaotic system in which errors introduced into the system can grow with time... As a consequence, data assimilation is a struggle between chaotic
Comparison of of Assimilation Schemes for HYCOM
 Comparison of of Assimilation Schemes for HYCOM Ashwanth Srinivasan, C. Thacker, Z. Garraffo, E. P. Chassignet, O. M. Smedstad, J. Cummings, F. Counillon, L. Bertino, T. M. Chin, P. Brasseur and C. Lozano
Comparison of of Assimilation Schemes for HYCOM Ashwanth Srinivasan, C. Thacker, Z. Garraffo, E. P. Chassignet, O. M. Smedstad, J. Cummings, F. Counillon, L. Bertino, T. M. Chin, P. Brasseur and C. Lozano
Fundamentals of Data Assimila1on
 014 GSI Community Tutorial NCAR Foothills Campus, Boulder, CO July 14-16, 014 Fundamentals of Data Assimila1on Milija Zupanski Cooperative Institute for Research in the Atmosphere Colorado State University
014 GSI Community Tutorial NCAR Foothills Campus, Boulder, CO July 14-16, 014 Fundamentals of Data Assimila1on Milija Zupanski Cooperative Institute for Research in the Atmosphere Colorado State University
6 Sequential Data Assimilation for Nonlinear Dynamics: The Ensemble Kalman Filter
 6 Sequential Data Assimilation for Nonlinear Dynamics: The Ensemble Kalman Filter GEIR EVENSEN Nansen Environmental and Remote Sensing Center, Bergen, Norway 6.1 Introduction Sequential data assimilation
6 Sequential Data Assimilation for Nonlinear Dynamics: The Ensemble Kalman Filter GEIR EVENSEN Nansen Environmental and Remote Sensing Center, Bergen, Norway 6.1 Introduction Sequential data assimilation
Applications of an ensemble Kalman Filter to regional ocean modeling associated with the western boundary currents variations
 Applications of an ensemble Kalman Filter to regional ocean modeling associated with the western boundary currents variations Miyazawa, Yasumasa (JAMSTEC) Collaboration with Princeton University AICS Data
Applications of an ensemble Kalman Filter to regional ocean modeling associated with the western boundary currents variations Miyazawa, Yasumasa (JAMSTEC) Collaboration with Princeton University AICS Data
Demonstration and Comparison of of Sequential Approaches for Altimeter Data Assimilation in in HYCOM
 Demonstration and Comparison of of Sequential Approaches for Altimeter Data Assimilation in in HYCOM A. Srinivasan, E. P. Chassignet, O. M. Smedstad, C. Thacker, L. Bertino, P. Brasseur, T. M. Chin,, F.
Demonstration and Comparison of of Sequential Approaches for Altimeter Data Assimilation in in HYCOM A. Srinivasan, E. P. Chassignet, O. M. Smedstad, C. Thacker, L. Bertino, P. Brasseur, T. M. Chin,, F.
(Extended) Kalman Filter
 Kalman Filter") (Extended) Kalman Filter Brian Hunt 7 June 2013 Goals of Data Assimilation (DA) Estimate the state of a system based on both current and all past observations of the system, using a model for the system
(Extended) Kalman Filter Brian Hunt 7 June 2013 Goals of Data Assimilation (DA) Estimate the state of a system based on both current and all past observations of the system, using a model for the system
Data assimilation in high dimensions
 Data assimilation in high dimensions David Kelly Courant Institute New York University New York NY www.dtbkelly.com February 12, 2015 Graduate seminar, CIMS David Kelly (CIMS) Data assimilation February
Data assimilation in high dimensions David Kelly Courant Institute New York University New York NY www.dtbkelly.com February 12, 2015 Graduate seminar, CIMS David Kelly (CIMS) Data assimilation February
Lecture 2: From Linear Regression to Kalman Filter and Beyond
 Lecture 2: From Linear Regression to Kalman Filter and Beyond Department of Biomedical Engineering and Computational Science Aalto University January 26, 2012 Contents 1 Batch and Recursive Estimation
Lecture 2: From Linear Regression to Kalman Filter and Beyond Department of Biomedical Engineering and Computational Science Aalto University January 26, 2012 Contents 1 Batch and Recursive Estimation
Data assimilation with and without a model
 Data assimilation with and without a model Tim Sauer George Mason University Parameter estimation and UQ U. Pittsburgh Mar. 5, 2017 Partially supported by NSF Most of this work is due to: Tyrus Berry,
Data assimilation with and without a model Tim Sauer George Mason University Parameter estimation and UQ U. Pittsburgh Mar. 5, 2017 Partially supported by NSF Most of this work is due to: Tyrus Berry,
Data Assimilation with the Ensemble Kalman Filter and the SEIK Filter applied to a Finite Element Model of the North Atlantic
 Data Assimilation with the Ensemble Kalman Filter and the SEIK Filter applied to a Finite Element Model of the North Atlantic L. Nerger S. Danilov, G. Kivman, W. Hiller, and J. Schröter Alfred Wegener
Data Assimilation with the Ensemble Kalman Filter and the SEIK Filter applied to a Finite Element Model of the North Atlantic L. Nerger S. Danilov, G. Kivman, W. Hiller, and J. Schröter Alfred Wegener
Fundamentals of Data Assimilation
 National Center for Atmospheric Research, Boulder, CO USA GSI Data Assimilation Tutorial - June 28-30, 2010 Acknowledgments and References WRFDA Overview (WRF Tutorial Lectures, H. Huang and D. Barker)
National Center for Atmospheric Research, Boulder, CO USA GSI Data Assimilation Tutorial - June 28-30, 2010 Acknowledgments and References WRFDA Overview (WRF Tutorial Lectures, H. Huang and D. Barker)
Relative Merits of 4D-Var and Ensemble Kalman Filter
 Relative Merits of 4D-Var and Ensemble Kalman Filter Andrew Lorenc Met Office, Exeter International summer school on Atmospheric and Oceanic Sciences (ISSAOS) "Atmospheric Data Assimilation". August 29
Relative Merits of 4D-Var and Ensemble Kalman Filter Andrew Lorenc Met Office, Exeter International summer school on Atmospheric and Oceanic Sciences (ISSAOS) "Atmospheric Data Assimilation". August 29
Christopher Jones Department of Mathematics, University of North Carolina at Chapel Hill And Warwick Mathematics Institute, University of Warwick
 Christopher Jones Department of Mathematics, University of North Carolina at Chapel Hill And Warwick Mathematics Institute, University of Warwick Future Directions in Applied Mathematics North Carolina
Christopher Jones Department of Mathematics, University of North Carolina at Chapel Hill And Warwick Mathematics Institute, University of Warwick Future Directions in Applied Mathematics North Carolina
Short tutorial on data assimilation
 Mitglied der Helmholtz-Gemeinschaft Short tutorial on data assimilation 23 June 2015 Wolfgang Kurtz & Harrie-Jan Hendricks Franssen Institute of Bio- and Geosciences IBG-3 (Agrosphere), Forschungszentrum
Mitglied der Helmholtz-Gemeinschaft Short tutorial on data assimilation 23 June 2015 Wolfgang Kurtz & Harrie-Jan Hendricks Franssen Institute of Bio- and Geosciences IBG-3 (Agrosphere), Forschungszentrum
EnKF-based particle filters
 EnKF-based particle filters Jana de Wiljes, Sebastian Reich, Wilhelm Stannat, Walter Acevedo June 20, 2017 Filtering Problem Signal dx t = f (X t )dt + 2CdW t Observations dy t = h(x t )dt + R 1/2 dv t.
EnKF-based particle filters Jana de Wiljes, Sebastian Reich, Wilhelm Stannat, Walter Acevedo June 20, 2017 Filtering Problem Signal dx t = f (X t )dt + 2CdW t Observations dy t = h(x t )dt + R 1/2 dv t.
Dynamic System Identification using HDMR-Bayesian Technique
 Dynamic System Identification using HDMR-Bayesian Technique *Shereena O A 1) and Dr. B N Rao 2) 1), 2) Department of Civil Engineering, IIT Madras, Chennai 600036, Tamil Nadu, India 1) ce14d020@smail.iitm.ac.in
Dynamic System Identification using HDMR-Bayesian Technique *Shereena O A 1) and Dr. B N Rao 2) 1), 2) Department of Civil Engineering, IIT Madras, Chennai 600036, Tamil Nadu, India 1) ce14d020@smail.iitm.ac.in
Ergodicity in data assimilation methods
 Ergodicity in data assimilation methods David Kelly Andy Majda Xin Tong Courant Institute New York University New York NY www.dtbkelly.com April 15, 2016 ETH Zurich David Kelly (CIMS) Data assimilation
Ergodicity in data assimilation methods David Kelly Andy Majda Xin Tong Courant Institute New York University New York NY www.dtbkelly.com April 15, 2016 ETH Zurich David Kelly (CIMS) Data assimilation
The Ensemble Kalman Filter:
 p.1 The Ensemble Kalman Filter: Theoretical formulation and practical implementation Geir Evensen Norsk Hydro Research Centre, Bergen, Norway Based on Evensen, Ocean Dynamics, Vol 5, No p. The Ensemble
p.1 The Ensemble Kalman Filter: Theoretical formulation and practical implementation Geir Evensen Norsk Hydro Research Centre, Bergen, Norway Based on Evensen, Ocean Dynamics, Vol 5, No p. The Ensemble
Bayesian Statistics and Data Assimilation. Jonathan Stroud. Department of Statistics The George Washington University
 Bayesian Statistics and Data Assimilation Jonathan Stroud Department of Statistics The George Washington University 1 Outline Motivation Bayesian Statistics Parameter Estimation in Data Assimilation Combined
Bayesian Statistics and Data Assimilation Jonathan Stroud Department of Statistics The George Washington University 1 Outline Motivation Bayesian Statistics Parameter Estimation in Data Assimilation Combined
Data assimilation as an optimal control problem and applications to UQ
 Data assimilation as an optimal control problem and applications to UQ Walter Acevedo, Angwenyi David, Jana de Wiljes & Sebastian Reich Universität Potsdam/ University of Reading IPAM, November 13th 2017
Data assimilation as an optimal control problem and applications to UQ Walter Acevedo, Angwenyi David, Jana de Wiljes & Sebastian Reich Universität Potsdam/ University of Reading IPAM, November 13th 2017
Alexander Barth, Aida Alvera-Azc. Azcárate, Robert H. Weisberg, University of South Florida. George Halliwell RSMAS, University of Miami
 Ensemble-based based Assimilation of HF-Radar Surface Currents in a West Florida Shelf ROMS Nested into HYCOM and filtering of spurious surface gravity waves. Alexander Barth, Aida Alvera-Azc Azcárate,
Ensemble-based based Assimilation of HF-Radar Surface Currents in a West Florida Shelf ROMS Nested into HYCOM and filtering of spurious surface gravity waves. Alexander Barth, Aida Alvera-Azc Azcárate,
Data assimilation with and without a model
 Data assimilation with and without a model Tyrus Berry George Mason University NJIT Feb. 28, 2017 Postdoc supported by NSF This work is in collaboration with: Tim Sauer, GMU Franz Hamilton, Postdoc, NCSU
Data assimilation with and without a model Tyrus Berry George Mason University NJIT Feb. 28, 2017 Postdoc supported by NSF This work is in collaboration with: Tim Sauer, GMU Franz Hamilton, Postdoc, NCSU
A comparison of sequential data assimilation schemes for. Twin Experiments
 A comparison of sequential data assimilation schemes for ocean prediction with HYCOM Twin Experiments A. Srinivasan, University of Miami, Miami, FL E. P. Chassignet, COAPS, Florida State University, Tallahassee,
A comparison of sequential data assimilation schemes for ocean prediction with HYCOM Twin Experiments A. Srinivasan, University of Miami, Miami, FL E. P. Chassignet, COAPS, Florida State University, Tallahassee,
EnKF Review. P.L. Houtekamer 7th EnKF workshop Introduction to the EnKF. Challenges. The ultimate global EnKF algorithm
 Overview 1 2 3 Review of the Ensemble Kalman Filter for Atmospheric Data Assimilation 6th EnKF Purpose EnKF equations localization After the 6th EnKF (2014), I decided with Prof. Zhang to summarize progress
Overview 1 2 3 Review of the Ensemble Kalman Filter for Atmospheric Data Assimilation 6th EnKF Purpose EnKF equations localization After the 6th EnKF (2014), I decided with Prof. Zhang to summarize progress
Nonparametric Drift Estimation for Stochastic Differential Equations
 Nonparametric Drift Estimation for Stochastic Differential Equations Gareth Roberts 1 Department of Statistics University of Warwick Brazilian Bayesian meeting, March 2010 Joint work with O. Papaspiliopoulos,
Nonparametric Drift Estimation for Stochastic Differential Equations Gareth Roberts 1 Department of Statistics University of Warwick Brazilian Bayesian meeting, March 2010 Joint work with O. Papaspiliopoulos,
A Note on the Particle Filter with Posterior Gaussian Resampling
 Tellus (6), 8A, 46 46 Copyright C Blackwell Munksgaard, 6 Printed in Singapore. All rights reserved TELLUS A Note on the Particle Filter with Posterior Gaussian Resampling By X. XIONG 1,I.M.NAVON 1,2 and
Tellus (6), 8A, 46 46 Copyright C Blackwell Munksgaard, 6 Printed in Singapore. All rights reserved TELLUS A Note on the Particle Filter with Posterior Gaussian Resampling By X. XIONG 1,I.M.NAVON 1,2 and
PATTERN RECOGNITION AND MACHINE LEARNING CHAPTER 13: SEQUENTIAL DATA
 PATTERN RECOGNITION AND MACHINE LEARNING CHAPTER 13: SEQUENTIAL DATA Contents in latter part Linear Dynamical Systems What is different from HMM? Kalman filter Its strength and limitation Particle Filter
PATTERN RECOGNITION AND MACHINE LEARNING CHAPTER 13: SEQUENTIAL DATA Contents in latter part Linear Dynamical Systems What is different from HMM? Kalman filter Its strength and limitation Particle Filter
Impact of frontal eddy dynamics on the Loop Current variability during free and data assimilative HYCOM simulations
 Impact of frontal eddy dynamics on the Loop Current variability during free and data assimilative HYCOM simulations Matthieu Le Hénaff (1) Villy H. Kourafalou (1) Ashwanth Srinivasan (1) George R. Halliwell
Impact of frontal eddy dynamics on the Loop Current variability during free and data assimilative HYCOM simulations Matthieu Le Hénaff (1) Villy H. Kourafalou (1) Ashwanth Srinivasan (1) George R. Halliwell
Lagrangian Data Assimilation and its Applications to Geophysical Fluid Flows
 Lagrangian Data Assimilation and its Applications to Geophysical Fluid Flows by Laura Slivinski B.S., University of Maryland; College Park, MD, 2009 Sc.M, Brown University; Providence, RI, 2010 A dissertation
Lagrangian Data Assimilation and its Applications to Geophysical Fluid Flows by Laura Slivinski B.S., University of Maryland; College Park, MD, 2009 Sc.M, Brown University; Providence, RI, 2010 A dissertation
Gaussian Process Approximations of Stochastic Differential Equations
 Gaussian Process Approximations of Stochastic Differential Equations Cédric Archambeau Dan Cawford Manfred Opper John Shawe-Taylor May, 2006 1 Introduction Some of the most complex models routinely run
Gaussian Process Approximations of Stochastic Differential Equations Cédric Archambeau Dan Cawford Manfred Opper John Shawe-Taylor May, 2006 1 Introduction Some of the most complex models routinely run
Gaussian Filtering Strategies for Nonlinear Systems
 Gaussian Filtering Strategies for Nonlinear Systems Canonical Nonlinear Filtering Problem ~u m+1 = ~ f (~u m )+~ m+1 ~v m+1 = ~g(~u m+1 )+~ o m+1 I ~ f and ~g are nonlinear & deterministic I Noise/Errors
Gaussian Filtering Strategies for Nonlinear Systems Canonical Nonlinear Filtering Problem ~u m+1 = ~ f (~u m )+~ m+1 ~v m+1 = ~g(~u m+1 )+~ o m+1 I ~ f and ~g are nonlinear & deterministic I Noise/Errors
A data-driven method for improving the correlation estimation in serial ensemble Kalman filter
 A data-driven method for improving the correlation estimation in serial ensemble Kalman filter Michèle De La Chevrotière, 1 John Harlim 2 1 Department of Mathematics, Penn State University, 2 Department
A data-driven method for improving the correlation estimation in serial ensemble Kalman filter Michèle De La Chevrotière, 1 John Harlim 2 1 Department of Mathematics, Penn State University, 2 Department
ECE276A: Sensing & Estimation in Robotics Lecture 10: Gaussian Mixture and Particle Filtering
 ECE276A: Sensing & Estimation in Robotics Lecture 10: Gaussian Mixture and Particle Filtering Lecturer: Nikolay Atanasov: natanasov@ucsd.edu Teaching Assistants: Siwei Guo: s9guo@eng.ucsd.edu Anwesan Pal:
ECE276A: Sensing & Estimation in Robotics Lecture 10: Gaussian Mixture and Particle Filtering Lecturer: Nikolay Atanasov: natanasov@ucsd.edu Teaching Assistants: Siwei Guo: s9guo@eng.ucsd.edu Anwesan Pal:
Data Assimilation Research Testbed Tutorial
 Data Assimilation Research Testbed Tutorial Section 2: How should observations of a state variable impact an unobserved state variable? Multivariate assimilation. Single observed variable, single unobserved
Data Assimilation Research Testbed Tutorial Section 2: How should observations of a state variable impact an unobserved state variable? Multivariate assimilation. Single observed variable, single unobserved
A Global Atmospheric Model. Joe Tribbia NCAR Turbulence Summer School July 2008
 A Global Atmospheric Model Joe Tribbia NCAR Turbulence Summer School July 2008 Outline Broad overview of what is in a global climate/weather model of the atmosphere Spectral dynamical core Some results-climate
A Global Atmospheric Model Joe Tribbia NCAR Turbulence Summer School July 2008 Outline Broad overview of what is in a global climate/weather model of the atmosphere Spectral dynamical core Some results-climate
Lecture 6: Bayesian Inference in SDE Models
 Lecture 6: Bayesian Inference in SDE Models Bayesian Filtering and Smoothing Point of View Simo Särkkä Aalto University Simo Särkkä (Aalto) Lecture 6: Bayesian Inference in SDEs 1 / 45 Contents 1 SDEs
Lecture 6: Bayesian Inference in SDE Models Bayesian Filtering and Smoothing Point of View Simo Särkkä Aalto University Simo Särkkä (Aalto) Lecture 6: Bayesian Inference in SDEs 1 / 45 Contents 1 SDEs
Forecasting and data assimilation
 Supported by the National Science Foundation DMS Forecasting and data assimilation Outline Numerical models Kalman Filter Ensembles Douglas Nychka, Thomas Bengtsson, Chris Snyder Geophysical Statistics
Supported by the National Science Foundation DMS Forecasting and data assimilation Outline Numerical models Kalman Filter Ensembles Douglas Nychka, Thomas Bengtsson, Chris Snyder Geophysical Statistics
Brian J. Etherton University of North Carolina
 Brian J. Etherton University of North Carolina The next 90 minutes of your life Data Assimilation Introit Different methodologies Barnes Analysis in IDV NWP Error Sources 1. Intrinsic Predictability Limitations
Brian J. Etherton University of North Carolina The next 90 minutes of your life Data Assimilation Introit Different methodologies Barnes Analysis in IDV NWP Error Sources 1. Intrinsic Predictability Limitations
Introduction to Ensemble Kalman Filters and the Data Assimilation Research Testbed
 Introduction to Ensemble Kalman Filters and the Data Assimilation Research Testbed Jeffrey Anderson, Tim Hoar, Nancy Collins NCAR Institute for Math Applied to Geophysics pg 1 What is Data Assimilation?
Introduction to Ensemble Kalman Filters and the Data Assimilation Research Testbed Jeffrey Anderson, Tim Hoar, Nancy Collins NCAR Institute for Math Applied to Geophysics pg 1 What is Data Assimilation?
Bayesian Nonlinear Assimilation of Eulerian and Lagrangian Coastal Flow Data
 DISTRIBUTION STATEMENT A. Approved for public release; distribution is unlimited. Bayesian Nonlinear Assimilation of Eulerian and Lagrangian Coastal Flow Data Dr. Pierre F.J. Lermusiaux Department of Mechanical
DISTRIBUTION STATEMENT A. Approved for public release; distribution is unlimited. Bayesian Nonlinear Assimilation of Eulerian and Lagrangian Coastal Flow Data Dr. Pierre F.J. Lermusiaux Department of Mechanical
Data Assimilation: Finding the Initial Conditions in Large Dynamical Systems. Eric Kostelich Data Mining Seminar, Feb. 6, 2006
 Data Assimilation: Finding the Initial Conditions in Large Dynamical Systems Eric Kostelich Data Mining Seminar, Feb. 6, 2006 kostelich@asu.edu Co-Workers Istvan Szunyogh, Gyorgyi Gyarmati, Ed Ott, Brian
Data Assimilation: Finding the Initial Conditions in Large Dynamical Systems Eric Kostelich Data Mining Seminar, Feb. 6, 2006 kostelich@asu.edu Co-Workers Istvan Szunyogh, Gyorgyi Gyarmati, Ed Ott, Brian
State and Parameter Estimation in Stochastic Dynamical Models
 State and Parameter Estimation in Stochastic Dynamical Models Timothy DelSole George Mason University, Fairfax, Va and Center for Ocean-Land-Atmosphere Studies, Calverton, MD June 21, 2011 1 1 collaboration
State and Parameter Estimation in Stochastic Dynamical Models Timothy DelSole George Mason University, Fairfax, Va and Center for Ocean-Land-Atmosphere Studies, Calverton, MD June 21, 2011 1 1 collaboration
Data assimilation in high dimensions
 Data assimilation in high dimensions David Kelly Kody Law Andy Majda Andrew Stuart Xin Tong Courant Institute New York University New York NY www.dtbkelly.com February 3, 2016 DPMMS, University of Cambridge
Data assimilation in high dimensions David Kelly Kody Law Andy Majda Andrew Stuart Xin Tong Courant Institute New York University New York NY www.dtbkelly.com February 3, 2016 DPMMS, University of Cambridge
What do we know about EnKF?
 What do we know about EnKF? David Kelly Kody Law Andrew Stuart Andrew Majda Xin Tong Courant Institute New York University New York, NY April 10, 2015 CAOS seminar, Courant. David Kelly (NYU) EnKF April
What do we know about EnKF? David Kelly Kody Law Andrew Stuart Andrew Majda Xin Tong Courant Institute New York University New York, NY April 10, 2015 CAOS seminar, Courant. David Kelly (NYU) EnKF April
Seminar: Data Assimilation
 Seminar: Data Assimilation Jonas Latz, Elisabeth Ullmann Chair of Numerical Mathematics (M2) Technical University of Munich Jonas Latz, Elisabeth Ullmann (TUM) Data Assimilation 1 / 28 Prerequisites Bachelor:
Seminar: Data Assimilation Jonas Latz, Elisabeth Ullmann Chair of Numerical Mathematics (M2) Technical University of Munich Jonas Latz, Elisabeth Ullmann (TUM) Data Assimilation 1 / 28 Prerequisites Bachelor:
An Efficient Ensemble Data Assimilation Approach To Deal With Range Limited Observation
 An Efficient Ensemble Data Assimilation Approach To Deal With Range Limited Observation A. Shah 1,2, M. E. Gharamti 1, L. Bertino 1 1 Nansen Environmental and Remote Sensing Center 2 University of Bergen
An Efficient Ensemble Data Assimilation Approach To Deal With Range Limited Observation A. Shah 1,2, M. E. Gharamti 1, L. Bertino 1 1 Nansen Environmental and Remote Sensing Center 2 University of Bergen
Four-Dimensional Ensemble Kalman Filtering
 Four-Dimensional Ensemble Kalman Filtering B.R. Hunt, E. Kalnay, E.J. Kostelich, E. Ott, D.J. Patil, T. Sauer, I. Szunyogh, J.A. Yorke, A.V. Zimin University of Maryland, College Park, MD 20742, USA Ensemble
Four-Dimensional Ensemble Kalman Filtering B.R. Hunt, E. Kalnay, E.J. Kostelich, E. Ott, D.J. Patil, T. Sauer, I. Szunyogh, J.A. Yorke, A.V. Zimin University of Maryland, College Park, MD 20742, USA Ensemble
Ensemble Kalman filter assimilation of transient groundwater flow data via stochastic moment equations
 Ensemble Kalman filter assimilation of transient groundwater flow data via stochastic moment equations Alberto Guadagnini (1,), Marco Panzeri (1), Monica Riva (1,), Shlomo P. Neuman () (1) Department of
Ensemble Kalman filter assimilation of transient groundwater flow data via stochastic moment equations Alberto Guadagnini (1,), Marco Panzeri (1), Monica Riva (1,), Shlomo P. Neuman () (1) Department of
A Spectral Approach to Linear Bayesian Updating
 A Spectral Approach to Linear Bayesian Updating Oliver Pajonk 1,2, Bojana V. Rosic 1, Alexander Litvinenko 1, and Hermann G. Matthies 1 1 Institute of Scientific Computing, TU Braunschweig, Germany 2 SPT
A Spectral Approach to Linear Bayesian Updating Oliver Pajonk 1,2, Bojana V. Rosic 1, Alexander Litvinenko 1, and Hermann G. Matthies 1 1 Institute of Scientific Computing, TU Braunschweig, Germany 2 SPT
Performance of ensemble Kalman filters with small ensembles
 Performance of ensemble Kalman filters with small ensembles Xin T Tong Joint work with Andrew J. Majda National University of Singapore Sunday 28 th May, 2017 X.Tong EnKF performance 1 / 31 Content Ensemble
Performance of ensemble Kalman filters with small ensembles Xin T Tong Joint work with Andrew J. Majda National University of Singapore Sunday 28 th May, 2017 X.Tong EnKF performance 1 / 31 Content Ensemble
Numerical Weather Prediction: Data assimilation. Steven Cavallo
 Numerical Weather Prediction: Data assimilation Steven Cavallo Data assimilation (DA) is the process estimating the true state of a system given observations of the system and a background estimate. Observations
Numerical Weather Prediction: Data assimilation Steven Cavallo Data assimilation (DA) is the process estimating the true state of a system given observations of the system and a background estimate. Observations
Bayesian Hierarchical Model Characterization of Model Error in Ocean Data Assimilation and Forecasts
 DISTRIBUTION STATEMENT A: Distribution approved for public release; distribution is unlimited. Bayesian Hierarchical Model Characterization of Model Error in Ocean Data Assimilation and Forecasts Christopher
DISTRIBUTION STATEMENT A: Distribution approved for public release; distribution is unlimited. Bayesian Hierarchical Model Characterization of Model Error in Ocean Data Assimilation and Forecasts Christopher
Data Assimilation for Dispersion Models
 Data Assimilation for Dispersion Models K. V. Umamaheswara Reddy Dept. of Mechanical and Aerospace Engg. State University of New Yor at Buffalo Buffalo, NY, U.S.A. venatar@buffalo.edu Yang Cheng Dept.
Data Assimilation for Dispersion Models K. V. Umamaheswara Reddy Dept. of Mechanical and Aerospace Engg. State University of New Yor at Buffalo Buffalo, NY, U.S.A. venatar@buffalo.edu Yang Cheng Dept.
Application of the Ensemble Kalman Filter to History Matching
 Application of the Ensemble Kalman Filter to History Matching Presented at Texas A&M, November 16,2010 Outline Philosophy EnKF for Data Assimilation Field History Match Using EnKF with Covariance Localization
Application of the Ensemble Kalman Filter to History Matching Presented at Texas A&M, November 16,2010 Outline Philosophy EnKF for Data Assimilation Field History Match Using EnKF with Covariance Localization
Ensemble prediction and strategies for initialization: Tangent Linear and Adjoint Models, Singular Vectors, Lyapunov vectors
 Ensemble prediction and strategies for initialization: Tangent Linear and Adjoint Models, Singular Vectors, Lyapunov vectors Eugenia Kalnay Lecture 2 Alghero, May 2008 Elements of Ensemble Forecasting
Ensemble prediction and strategies for initialization: Tangent Linear and Adjoint Models, Singular Vectors, Lyapunov vectors Eugenia Kalnay Lecture 2 Alghero, May 2008 Elements of Ensemble Forecasting
Aspects of the practical application of ensemble-based Kalman filters
 Aspects of the practical application of ensemble-based Kalman filters Lars Nerger Alfred Wegener Institute for Polar and Marine Research Bremerhaven, Germany and Bremen Supercomputing Competence Center
Aspects of the practical application of ensemble-based Kalman filters Lars Nerger Alfred Wegener Institute for Polar and Marine Research Bremerhaven, Germany and Bremen Supercomputing Competence Center
Bayesian Calibration of Simulators with Structured Discretization Uncertainty
 Bayesian Calibration of Simulators with Structured Discretization Uncertainty Oksana A. Chkrebtii Department of Statistics, The Ohio State University Joint work with Matthew T. Pratola (Statistics, The
Bayesian Calibration of Simulators with Structured Discretization Uncertainty Oksana A. Chkrebtii Department of Statistics, The Ohio State University Joint work with Matthew T. Pratola (Statistics, The
Strongly coupled data assimilation: Could scatterometer winds improve ocean analyses?
 Strongly coupled data assimilation: Could scatterometer winds improve ocean analyses? Sergey Frolov 1 Craig H. Bishop 2 ; Teddy Holt 2 ; James Cummings 3 ; David Kuhl 4 1 UCAR, Visiting Scientist 2 Naval
Strongly coupled data assimilation: Could scatterometer winds improve ocean analyses? Sergey Frolov 1 Craig H. Bishop 2 ; Teddy Holt 2 ; James Cummings 3 ; David Kuhl 4 1 UCAR, Visiting Scientist 2 Naval
A Stochastic Collocation based. for Data Assimilation
 A Stochastic Collocation based Kalman Filter (SCKF) for Data Assimilation Lingzao Zeng and Dongxiao Zhang University of Southern California August 11, 2009 Los Angeles Outline Introduction SCKF Algorithm
A Stochastic Collocation based Kalman Filter (SCKF) for Data Assimilation Lingzao Zeng and Dongxiao Zhang University of Southern California August 11, 2009 Los Angeles Outline Introduction SCKF Algorithm
Organization. I MCMC discussion. I project talks. I Lecture.
 Organization I MCMC discussion I project talks. I Lecture. Content I Uncertainty Propagation Overview I Forward-Backward with an Ensemble I Model Reduction (Intro) Uncertainty Propagation in Causal Systems
Organization I MCMC discussion I project talks. I Lecture. Content I Uncertainty Propagation Overview I Forward-Backward with an Ensemble I Model Reduction (Intro) Uncertainty Propagation in Causal Systems
Data assimilation; comparison of 4D-Var and LETKF smoothers
 Data assimilation; comparison of 4D-Var and LETKF smoothers Eugenia Kalnay and many friends University of Maryland CSCAMM DAS13 June 2013 Contents First part: Forecasting the weather - we are really getting
Data assimilation; comparison of 4D-Var and LETKF smoothers Eugenia Kalnay and many friends University of Maryland CSCAMM DAS13 June 2013 Contents First part: Forecasting the weather - we are really getting
A new Hierarchical Bayes approach to ensemble-variational data assimilation
 A new Hierarchical Bayes approach to ensemble-variational data assimilation Michael Tsyrulnikov and Alexander Rakitko HydroMetCenter of Russia College Park, 20 Oct 2014 Michael Tsyrulnikov and Alexander
A new Hierarchical Bayes approach to ensemble-variational data assimilation Michael Tsyrulnikov and Alexander Rakitko HydroMetCenter of Russia College Park, 20 Oct 2014 Michael Tsyrulnikov and Alexander
Efficient Data Assimilation for Spatiotemporal Chaos: a Local Ensemble Transform Kalman Filter
 Efficient Data Assimilation for Spatiotemporal Chaos: a Local Ensemble Transform Kalman Filter arxiv:physics/0511236 v1 28 Nov 2005 Brian R. Hunt Institute for Physical Science and Technology and Department
Efficient Data Assimilation for Spatiotemporal Chaos: a Local Ensemble Transform Kalman Filter arxiv:physics/0511236 v1 28 Nov 2005 Brian R. Hunt Institute for Physical Science and Technology and Department
Ensemble Kalman Filters for WRF-ARW. Chris Snyder MMM and IMAGe National Center for Atmospheric Research
 Ensemble Kalman Filters for WRF-ARW Chris Snyder MMM and IMAGe National Center for Atmospheric Research Preliminaries Notation: x = modelʼs state w.r.t. some discrete basis, e.g. grid-pt values y = Hx
Ensemble Kalman Filters for WRF-ARW Chris Snyder MMM and IMAGe National Center for Atmospheric Research Preliminaries Notation: x = modelʼs state w.r.t. some discrete basis, e.g. grid-pt values y = Hx
Filtering the Navier-Stokes Equation
 Filtering the Navier-Stokes Equation Andrew M Stuart1 1 Mathematics Institute and Centre for Scientific Computing University of Warwick Geometric Methods Brown, November 4th 11 Collaboration with C. Brett,
Filtering the Navier-Stokes Equation Andrew M Stuart1 1 Mathematics Institute and Centre for Scientific Computing University of Warwick Geometric Methods Brown, November 4th 11 Collaboration with C. Brett,
A nested sampling particle filter for nonlinear data assimilation
 Quarterly Journal of the Royal Meteorological Society Q. J. R. Meteorol. Soc. : 14, July 2 A DOI:.2/qj.224 A nested sampling particle filter for nonlinear data assimilation Ahmed H. Elsheikh a,b *, Ibrahim
Quarterly Journal of the Royal Meteorological Society Q. J. R. Meteorol. Soc. : 14, July 2 A DOI:.2/qj.224 A nested sampling particle filter for nonlinear data assimilation Ahmed H. Elsheikh a,b *, Ibrahim
Four-dimensional ensemble Kalman filtering
 Tellus (24), 56A, 273 277 Copyright C Blackwell Munksgaard, 24 Printed in UK. All rights reserved TELLUS Four-dimensional ensemble Kalman filtering By B. R. HUNT 1, E. KALNAY 1, E. J. KOSTELICH 2,E.OTT
Tellus (24), 56A, 273 277 Copyright C Blackwell Munksgaard, 24 Printed in UK. All rights reserved TELLUS Four-dimensional ensemble Kalman filtering By B. R. HUNT 1, E. KALNAY 1, E. J. KOSTELICH 2,E.OTT
EnKF Localization Techniques and Balance
 EnKF Localization Techniques and Balance Steven Greybush Eugenia Kalnay, Kayo Ide, Takemasa Miyoshi, and Brian Hunt Weather Chaos Meeting September 21, 2009 Data Assimilation Equation Scalar form: x a
EnKF Localization Techniques and Balance Steven Greybush Eugenia Kalnay, Kayo Ide, Takemasa Miyoshi, and Brian Hunt Weather Chaos Meeting September 21, 2009 Data Assimilation Equation Scalar form: x a
Abstract 2. ENSEMBLE KALMAN FILTERS 1. INTRODUCTION
 J5.4 4D ENSEMBLE KALMAN FILTERING FOR ASSIMILATION OF ASYNCHRONOUS OBSERVATIONS T. Sauer George Mason University, Fairfax, VA 22030 B.R. Hunt, J.A. Yorke, A.V. Zimin, E. Ott, E.J. Kostelich, I. Szunyogh,
J5.4 4D ENSEMBLE KALMAN FILTERING FOR ASSIMILATION OF ASYNCHRONOUS OBSERVATIONS T. Sauer George Mason University, Fairfax, VA 22030 B.R. Hunt, J.A. Yorke, A.V. Zimin, E. Ott, E.J. Kostelich, I. Szunyogh,
EnKF and filter divergence
 EnKF and filter divergence David Kelly Andrew Stuart Kody Law Courant Institute New York University New York, NY dtbkelly.com December 12, 2014 Applied and computational mathematics seminar, NIST. David
EnKF and filter divergence David Kelly Andrew Stuart Kody Law Courant Institute New York University New York, NY dtbkelly.com December 12, 2014 Applied and computational mathematics seminar, NIST. David
A Comparison of Error Subspace Kalman Filters
 Tellus 000, 000 000 (0000) Printed 4 February 2005 (Tellus LATEX style file v2.2) A Comparison of Error Subspace Kalman Filters By LARS NERGER, WOLFGANG HILLER and JENS SCHRÖTER Alfred Wegener Institute
Tellus 000, 000 000 (0000) Printed 4 February 2005 (Tellus LATEX style file v2.2) A Comparison of Error Subspace Kalman Filters By LARS NERGER, WOLFGANG HILLER and JENS SCHRÖTER Alfred Wegener Institute
Convergence of the Ensemble Kalman Filter in Hilbert Space
 Convergence of the Ensemble Kalman Filter in Hilbert Space Jan Mandel Center for Computational Mathematics Department of Mathematical and Statistical Sciences University of Colorado Denver Parts based
Convergence of the Ensemble Kalman Filter in Hilbert Space Jan Mandel Center for Computational Mathematics Department of Mathematical and Statistical Sciences University of Colorado Denver Parts based
Relationship between Singular Vectors, Bred Vectors, 4D-Var and EnKF
 Relationship between Singular Vectors, Bred Vectors, 4D-Var and EnKF Eugenia Kalnay and Shu-Chih Yang with Alberto Carrasi, Matteo Corazza and Takemasa Miyoshi 4th EnKF Workshop, April 2010 Relationship
Relationship between Singular Vectors, Bred Vectors, 4D-Var and EnKF Eugenia Kalnay and Shu-Chih Yang with Alberto Carrasi, Matteo Corazza and Takemasa Miyoshi 4th EnKF Workshop, April 2010 Relationship
LARGE-SCALE TRAFFIC STATE ESTIMATION
 Hans van Lint, Yufei Yuan & Friso Scholten A localized deterministic Ensemble Kalman Filter LARGE-SCALE TRAFFIC STATE ESTIMATION CONTENTS Intro: need for large-scale traffic state estimation Some Kalman
Hans van Lint, Yufei Yuan & Friso Scholten A localized deterministic Ensemble Kalman Filter LARGE-SCALE TRAFFIC STATE ESTIMATION CONTENTS Intro: need for large-scale traffic state estimation Some Kalman
Introduction to Particle Filters for Data Assimilation
 Introduction to Particle Filters for Data Assimilation Mike Dowd Dept of Mathematics & Statistics (and Dept of Oceanography Dalhousie University, Halifax, Canada STATMOS Summer School in Data Assimila5on,
Introduction to Particle Filters for Data Assimilation Mike Dowd Dept of Mathematics & Statistics (and Dept of Oceanography Dalhousie University, Halifax, Canada STATMOS Summer School in Data Assimila5on,
Lecture 7: Optimal Smoothing
 Department of Biomedical Engineering and Computational Science Aalto University March 17, 2011 Contents 1 What is Optimal Smoothing? 2 Bayesian Optimal Smoothing Equations 3 Rauch-Tung-Striebel Smoother
Department of Biomedical Engineering and Computational Science Aalto University March 17, 2011 Contents 1 What is Optimal Smoothing? 2 Bayesian Optimal Smoothing Equations 3 Rauch-Tung-Striebel Smoother
Winter 2019 Math 106 Topics in Applied Mathematics. Lecture 8: Importance Sampling
 Winter 2019 Math 106 Topics in Applied Mathematics Data-driven Uncertainty Quantification Yoonsang Lee (yoonsang.lee@dartmouth.edu) Lecture 8: Importance Sampling 8.1 Importance Sampling Importance sampling
Winter 2019 Math 106 Topics in Applied Mathematics Data-driven Uncertainty Quantification Yoonsang Lee (yoonsang.lee@dartmouth.edu) Lecture 8: Importance Sampling 8.1 Importance Sampling Importance sampling
Tracer transport in a sea of vortices
 Tracer transport in a sea of vortices A. Provenzale ISAC-CNR, Torino and CIMA, Savona, Italy Work done with: Annalisa Bracco, Jost von Hardenberg, Claudia Pasquero A. Babiano, E. Chassignet, Z. Garraffo,
Tracer transport in a sea of vortices A. Provenzale ISAC-CNR, Torino and CIMA, Savona, Italy Work done with: Annalisa Bracco, Jost von Hardenberg, Claudia Pasquero A. Babiano, E. Chassignet, Z. Garraffo,
Data assimilation : Basics and meteorology
 Data assimilation : Basics and meteorology Olivier Talagrand Laboratoire de Météorologie Dynamique, École Normale Supérieure, Paris, France Workshop on Coupled Climate-Economics Modelling and Data Analysis
Data assimilation : Basics and meteorology Olivier Talagrand Laboratoire de Météorologie Dynamique, École Normale Supérieure, Paris, France Workshop on Coupled Climate-Economics Modelling and Data Analysis
New Fast Kalman filter method
 New Fast Kalman filter method Hojat Ghorbanidehno, Hee Sun Lee 1. Introduction Data assimilation methods combine dynamical models of a system with typically noisy observations to obtain estimates of the
New Fast Kalman filter method Hojat Ghorbanidehno, Hee Sun Lee 1. Introduction Data assimilation methods combine dynamical models of a system with typically noisy observations to obtain estimates of the
Relationship between Singular Vectors, Bred Vectors, 4D-Var and EnKF
 Relationship between Singular Vectors, Bred Vectors, 4D-Var and EnKF Eugenia Kalnay and Shu-Chih Yang with Alberto Carrasi, Matteo Corazza and Takemasa Miyoshi ECODYC10, Dresden 28 January 2010 Relationship
Relationship between Singular Vectors, Bred Vectors, 4D-Var and EnKF Eugenia Kalnay and Shu-Chih Yang with Alberto Carrasi, Matteo Corazza and Takemasa Miyoshi ECODYC10, Dresden 28 January 2010 Relationship
Fundamentals of Data Assimila1on
 2015 GSI Community Tutorial NCAR Foothills Campus, Boulder, CO August 11-14, 2015 Fundamentals of Data Assimila1on Milija Zupanski Cooperative Institute for Research in the Atmosphere Colorado State University
2015 GSI Community Tutorial NCAR Foothills Campus, Boulder, CO August 11-14, 2015 Fundamentals of Data Assimila1on Milija Zupanski Cooperative Institute for Research in the Atmosphere Colorado State University
TSRT14: Sensor Fusion Lecture 8
 TSRT14: Sensor Fusion Lecture 8 Particle filter theory Marginalized particle filter Gustaf Hendeby gustaf.hendeby@liu.se TSRT14 Lecture 8 Gustaf Hendeby Spring 2018 1 / 25 Le 8: particle filter theory,
TSRT14: Sensor Fusion Lecture 8 Particle filter theory Marginalized particle filter Gustaf Hendeby gustaf.hendeby@liu.se TSRT14 Lecture 8 Gustaf Hendeby Spring 2018 1 / 25 Le 8: particle filter theory,
Robust Ensemble Filtering With Improved Storm Surge Forecasting
 Robust Ensemble Filtering With Improved Storm Surge Forecasting U. Altaf, T. Buttler, X. Luo, C. Dawson, T. Mao, I.Hoteit Meteo France, Toulouse, Nov 13, 2012 Project Ensemble data assimilation for storm
Robust Ensemble Filtering With Improved Storm Surge Forecasting U. Altaf, T. Buttler, X. Luo, C. Dawson, T. Mao, I.Hoteit Meteo France, Toulouse, Nov 13, 2012 Project Ensemble data assimilation for storm