Ensemble Kalman filter assimilation of transient groundwater flow data via stochastic moment equations
|
|
|
- Derrick Doyle
- 5 years ago
- Views:
Transcription
 (1) Department of Civil and Environmental Engineering, Politecnico di Milano, Milan, Italy () Department of Hydrology and Water Resources, University of Arizona, Tucson,")
1 Ensemble Kalman filter assimilation of transient groundwater flow data via stochastic moment equations Alberto Guadagnini (1,), Marco Panzeri (1), Monica Riva (1,), Shlomo P. Neuman () (1) Department of Civil and Environmental Engineering, Politecnico di Milano, Milan, Italy () Department of Hydrology and Water Resources, University of Arizona, Tucson, Arizona, USA


2 Objective: Inverse Modeling Data Assimilation History Matching Data Assimilation History Matching Inverse Modeling Prior model: Posterior model: x WCT P1 x x x x x x x x x x x t WCT P1 x x x x x x x x x x x x x x t Producer P1 Injector well W1 Observations WCT P1 x x x x x x x x x x x t x x x t The inverse problem aims at determining the unknown model parameters by making use of observed state data.
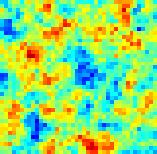
3 Inverse modeling / parameter estimation 3 x Impervious boundary Reference field: exponential variogram (Sill =.; Integral scale = 4.) Guadagnini A., Panzeri M., Riva M., Neuman S.P Impervious boundary x from Panzeri et al. [13] ref h Pumping well (flow rate = 3) 9 measurements σ =.1 h measurement locations 1 observation times σ = ( ) E ( ) he from Panzeri et al. [13] t
4 Ensemble Kalman Filter (EnKF) 4 Start with the Kalman Filter (KF) [Kalman, 196] First developed to integrate noisy measured data in a physical model characterized by (a) linear dynamics and (b) a Gaussian distribution of system variables and measurement errors. Two-step implementation scheme: (1) mean and covariances of system state variables are propagated/advanced in time until new measurements of these states (and/or other) variables are available (forward step); () measured values and the associated error measurement variances are employed to evaluate updated mean and covariances of system state variables (updating step). t = t t = t 1 t = t f(y ) f(y 1 y ) f(y 1 d 1 ) f(y y 1 ) f(y d ) Guadagnini A., Panzeri M., Riva M., Neuman S.P. f(d 1 y 1 ) f(d y )
5 Ensemble Kalman Filter (EnKF) 5 Start with the Kalman Filter (KF) [Kalman, 196] First developed to integrate noisy measured data in a physical model characterized by (a) linear dynamics and (b) a Gaussian distribution of system variables and measurement errors. Two-step implementation scheme: (1) mean and covariances of system state variables are propagated/advanced in time until new measurements of these states (and/or other) variables are available (forward step); () measured values and the associated error measurement variances are employed to evaluate updated mean and covariances of system state variables (updating step). t = t t = t 1 t = t f(y ) f(y 1 y ) f(y 1 d 1 ) f(y y 1 ) f(y d ) Guadagnini A., Panzeri M., Riva M., Neuman S.P. f(d 1 y 1 ) f(d y )
6 Ensemble Kalman Filter (EnKF) 6 Advantages: EnKF is associated with dynamic systems; observed data are obtained in time and employed for sequential updates of the model. no sensitivity analysis (gradient-based methods) relatively affordable computational cost sequential update of model variables/states well-suited for real time model estimation Ensemble of models (conceptual uncertainty quantification) t = t t = t 1 t = t f(y ) f(y 1 y ) f(y 1 d 1 ) f(y y 1 ) f(y d ) Guadagnini A., Panzeri M., Riva M., Neuman S.P. f(d 1 y 1 ) f(d y )
7 EnKF (traditional MC approach) 7 Data assimilation of transient groundwater flow data in complex geologic media via Ensemble Kalman filter First and second order statistical moments of parameters and state variables are traditionally approximated via Monte Carlo approach Difficulties a. A good approximation of the covariance function requires a large number of realizations (computationally intensive) b. When the collection ( ensemble ) of realizations is small, the spurious correlations in the empirical covariance matrix may lead to incorrect parameters updates (Filter Inbreeding)
8 EnKF coupled with MEs 8 Data assimilation of transient groundwater flow data via Ensemble Kalman filter Key point coupling EnKF with the solution of stochastic Moment Differential Equations (MEs) of transient groundwater flow Tartakovsky and Neuman [1998a, b, c]; e et al. [4]; Hernandez et al. [3, 6]; Riva et al. [9, 1]; Bianchi Janetti et al. [1]; Panzeri et al. [13a, b] Advantages a) MEs provide theoretical insights in the nature of the solution b) Solution of MEs can be achieved (in principle) by adopting a coarser grid than the one required by MC (computational efficiency) c) Alleviate Filter Inbreeding
![Brief history of groundwater flow MEs 9 Neuman and Orr [1993]: Steady-state groundwater flow MEs (nonlocal and localized format)](/docs-images/92/108760505/images/9-1.jpg "Tartakovsky and Neuman [1998a, b, c]: Transient exact and recursive approximations (including effective parameters for uniform mean")
![flow) Guadagnini and Neuman [1999a, b]; e et al. [4]: Numerical solution of steady-state and transient MEs.](/docs-images/92/108760505/images/9-2.jpg "x x 8 6 4 4 6 8 1 1 14 16 18 x1 8 6 4 4 6 8 1 1 14 16 18 x1 x 1 6. 5. 4. 3.. 1.. -1. -. -3. -4. -5. -6. -7.. 1.5 1..5. -.5-1. -1.5 -. -.5-3.")
9 Brief history of groundwater flow MEs 9 Neuman and Orr [1993]: Steady-state groundwater flow MEs (nonlocal and localized format) Tartakovsky and Neuman [1998a, b, c]: Transient exact and recursive approximations (including effective parameters for uniform mean flow) Guadagnini and Neuman [1999a, b]; e et al. [4]: Numerical solution of steady-state and transient MEs. x x x x1 x x from Guadagnini and Neuman [9]
![Brief history of groundwater flow MEs 1 Winter et al. [; 3]: Flow statistics in composite media p 1 (k) P 1 (x) p (k) p(b) Riva et al. [1]; Guadagnini et al. [3]; Neuman et al. [4, 7]; Riva et al.](/docs-images/92/108760505/images/10-1.jpg "[9]: Analytical solutions well flow; stochastic interpretation of pumping tests + field applications 3 G 1 G Hernandez et al. [3, 6]; Riva et al. [9, 1]; Bianchi Janetti et al.")
10 Brief history of groundwater flow MEs 1 Winter et al. [; 3]: Flow statistics in composite media p 1 (k) P 1 (x) p (k) p(b) Riva et al. [1]; Guadagnini et al. [3]; Neuman et al. [4, 7]; Riva et al. [9]: Analytical solutions well flow; stochastic interpretation of pumping tests + field applications 3 G 1 G Hernandez et al. [3, 6]; Riva et al. [9, 1]; Bianchi Janetti et al. [1]: Inverse modeling (steady-state and transient) + field applications from Riva et al. [1]
![Brief history of groundwater flow MEs 11 Riva et al. [11]: MEs & Model discrimination criteria Panzeri et al. [13a, b]: MEs & EnKF Neuman et al.](/docs-images/92/108760505/images/11-2.jpg "[8]; Riva and Guadagnini [9]: MEs and hierarchical media. Guadagnini and Neuman [1]; Morales Casique et al. [6a, b]; Riva et al.")
11 Brief history of groundwater flow MEs 11 Riva et al. [11]: MEs & Model discrimination criteria Panzeri et al. [13a, b]: MEs & EnKF Neuman et al. [8]; Riva and Guadagnini [9]: MEs and hierarchical media. Guadagnini and Neuman [1]; Morales Casique et al. [6a, b]; Riva et al. [6] + others: MEs for transport; well capture zones.
12 Extended MEs 1 Stochastic equations developed by e et al. [4] are extended to account for random initial conditions Zero-order mean flow equations: Second-order mean flow equations: ( ) ( x, t ) ( ) ( + q ) = ( ) h S( x) x, t f x, t t q ( ) ( ) ( ) ( ) ( x, t = K x h x, t ) + B.C. & I.C. G ( ) ( x, t ) ( ) ( ) h S( x) + q x, t = t σ x q G q r ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( x, t = K x h x, t + x, t + ) ( x, t) + B.C. & I.C.
13 Extended MEs 13 Stochastic equations developed by e et al. [4] are extended to account for random initial conditions Equations for the residual flux ( ) u ( yx,, s) () ( ) ( ) ( ) ( ) ( S y [ ( x,, )] = ( ) [, q ) y KG y yu y s KG x y C x y y, s ] s + B.C. & I.C. ( ) ( ) ( y ) ( ) u ( yx,, s) = K x h, s r ( ) ( ) x, y, s = u ( x, y, s) () y Second-order head (cross)covariance equations: () Ch ( yx,,,) st ( ) S( y) = K y C yxst + u yxt h ys s + B.C. & I.C. () () y [ G( ) y h (,,, )] y [ (,, ) y (, ) ]
14 EnKF: flowchart 14 MONTE CARLO MOMENT EQUATIONS Initial conditions: h f, T j j = 1,, NMC h f, T C u + h ( ) ( ) ( ) h u C h f, T
15 EnKF: flowchart 15 MONTE CARLO MOMENT EQUATIONS Initial conditions: h f, T j j = 1,, NMC h f, T C u + h ( ) ( ) ( ) h u C h f, T Forecast Step NMC deterministic flow problems Stochastic Moment Equations h f, Tk j j = 1,, NMC h f, Tk C u + h ( ) ( ) ( ) h u C h f, T k
16 EnKF: flowchart 16 MONTE CARLO MOMENT EQUATIONS Initial conditions: h f, T j j = 1,, NMC h f, T C u + h ( ) ( ) ( ) h u C h f, T Forecast Step NMC deterministic flow problems Stochastic Moment Equations h f, Tk j j = 1,, NMC h f, Tk C u + h ( ) ( ) ( ) h u C h f, T k EnKF Updating Step: Observed data T d k Tk Σ dd
17 EnKF: flowchart 17 MONTE CARLO MOMENT EQUATIONS Initial conditions: h f, T j j = 1,, NMC h f, T C u + h ( ) ( ) ( ) h u C h f, T Forecast Step NMC deterministic flow problems Stochastic Moment Equations h f, Tk j j = 1,, NMC h f, Tk C u + h ( ) ( ) ( ) h u C h f, T k EnKF Updating Step: Observed data T d k Tk Σ dd h f, Tk j j = 1,, NMC h ut, k C u + h ( ) ( ) ( ) h u C h ut, k
18 Objectives of first analyses 18 Comparison of the two methodologies: 1. EnKF coupled with the solution of the stochastic moment equations (MEs) of transient groundwater flow;. Traditional MC-based EnKF with diverse numbers of model realizations (NMC = 1; 5; 1,; 1,; 1,). a. Accuracy of the estimated mean and variance of logconductivity and head fields b. Effect of magnitude of measurement error c. Effect of transient v. pseudo-steady state data d. Analysis of the occurrence of filter inbreeding (systematic underestimation of estimation variance with the assimilation) e. Computational efficiency
19 Inverse modeling / parameter estimation 19 x Constant head = Impervious boundary Reference field: exponential variogram (Sill =.; Integral scale = 4.) Impervious boundary x 1 Guadagnini A., Panzeri M., Riva M., Neuman S.P Constant head = from Panzeri et al. [13] ref h Pumping well (flow rate = 3) 9 measurements σ =.1 h measurement locations 1 observation times σ = ( ) E ( ) he from Panzeri et al. [13] t









20 Tests performed x 4. Impervious boundary I = σ =.5 σ = 1. σ =. a) b) c) Constant head = Impervious boundary Constant head =. I = x I = from Panzeri et al. [14]
21 Objectives of first analyses 1 Comparison of the two methodologies: 1. EnKF coupled with the solution of the stochastic moment equations (MEs) of transient groundwater flow;. Traditional MC-based EnKF with different number of model realizations (NMC = 1; 5; 1,; 1,; 1,). a. Accuracy of the estimated mean and variance of logconductivity and head fields b. Effect of magnitude of measurement error c. Effect of transient v. pseudo-steady state data d. Analysis of the occurrence of filter inbreeding (systematic underestimation of estimation variance with the assimilation) e. Computational efficiency






 = ( )")

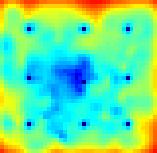
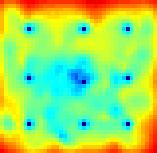
22 Inverse modeling / parameter estimation Reference Estimated mean fields T k = T k = 5 T k = 1 T k = T k = 3 T k = 4 T k = E T k N 1 ( ) = ( ) ( ) E T x x k i i ref N i = 1 T k from Panzeri et al. [14]







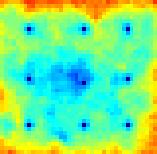
23 Inverse modeling / parameter estimation 3 Estimated variance fields T k = T k = 5 T k = 1 T k = σ T k = 3 T k = 4 T k = V More than 9% of the estimates lie inside the ± σ confidence intervals at each time T K from Panzeri et al. [14] T k N 1 ( ) σ ( ) V T = x k i N i= 1 T k
24 Objectives of first analyses 4 Comparison of the two methodologies: 1. EnKF coupled with the solution of the stochastic moment equations (MEs) of transient groundwater flow;. Traditional MC-based EnKF with different number of model realizations (NMC = 1; 5; 1,; 1,; 1,). a. Accuracy of the estimated mean and variance of logconductivity and head fields b. Effect of magnitude of measurement error c. Effect of transient v. pseudo-steady state data d. Analysis of the occurrence of filter inbreeding (systematic underestimation of estimation variance with the assimilation) e. Computational efficiency
25 Synthetic example: increasing number of observation times 5 1. E Test Case 3 (TC3): Adding 1 additional observation times to the conditioning data set from Panzeri et al. [13] TC1 TC T k h V T k TC1 TC T k
26 Objectives of first analyses 6 Comparison of the two methodologies: 1. EnKF coupled with the solution of the stochastic moment equations (MEs) of transient groundwater flow;. Traditional MC-based EnKF with diverse numbers of model realizations (NMC = 1; 5; 1,; 1,; 1,). a. Accuracy of the estimated mean and variance of logconductivity and head fields b. Effect of magnitude of measurement error c. Effect of transient v. pseudo-steady state data d. Analysis of the occurrence of filter inbreeding (systematic underestimation of estimation variance with the assimilation) e. Computational efficiency
27 Results: estimated mean fields 7 Estimated fields of ME ( x ) at the latest assimilation step ( t =1.) NMC =1, NMC = 1, True field ref, NMC = 1, NMC = 5 NMC = 1 from Panzeri et al. [14]



 at the")
28 Results: estimated variance fields 8 Estimated fields of ME σ ( x ) at the latest assimilation step ( t =1.) NMC =1, NMC =1, σ ( x) NMC = 1, NMC = 5 NMC = 1 from Panzeri et al. [14]
29 Results E 1.9 V t t ( ) ( ) N 1 ( ) = ( i) ( i) ref N i= 1 E t x x Filter Inbreeding (see also later) t 1 N σ i N i= 1 V t = x ME NMC =1 NMC = 5 NMC =1, NMC =1, NMC =1, t from Panzeri et al. [14]
30 Objectives of first analyses 3 Comparison of the two methodologies: 1. EnKF coupled with the solution of the stochastic moment equations (MEs) of transient groundwater flow;. Traditional MC-based EnKF with different number of model realizations (NMC = 1; 5; 1,; 1,; 1,). a. Accuracy of the estimated mean and variance of logconductivity and head fields b. Effect of magnitude of measurement error c. Effect of transient v. pseudo-steady state data d. Analysis of the occurrence of filter inbreeding (systematic underestimation of estimation variance with the assimilation) e. Computational efficiency
31 Filter inbreeding 31 The EnKF leads to systematically underestimated error during the assimilation. It is caused by the juxtaposition of diverse effects: i. updating of the collection of model realizations through a Kalman gain calculated from the same sample; ii. iii. influence of the finiteness of the sample size on the Kalman gain (spurious covariances in the sample covariance matrix); nonlinear relationship between hydraulic heads and logtransmissivities.
32 Filter inbreeding P σ.8.7 V E t t N 1 P t H x x x { } i t i i ref ( ) = ( ) ( ) ( ) σ σ N i= 1 H { } : Heaviside step function t ME NMC =1 NMC = 5 NMC =1, NMC =1, NMC =1, from Panzeri et al. [14]


33 ME NMC =1, NMC = 1, NMC = 5 NMC = 1 σ =.5 I = 4. ME NMC =1, NMC = 1, NMC = 5 NMC = 1 σ =. I =. Spatial location (black dots) of the reference values of that lie outside the corresponding confidence intervals of width equal to ± two standard deviations about their mean obtained after the final updating time step. Also related to Filter inbreeding. from Panzeri et al. [14]
![Field scale application data analyzed 34 Corrected drawdown.14.1.1.8.6.4. Pumping at B4 B1 B B3 Guadagnini A., Panzeri M., Riva M., Neuman S.P.. 1 1 1 1 1 Time [s] Heterogeneous fluvial aquifer in the Neckar river valley near Tübingen, Germany.](/docs-images/92/108760505/images/34-1.jpg "The aquifer consists mainly of sandy gravel material. Prior works at the site include: a) Geostatistical analyses b) Modeling of tracer tests c) Stochastic delineation of wellprotecion zones")
34 Field scale application data analyzed 34 Corrected drawdown Pumping at B4 B1 B B3 Guadagnini A., Panzeri M., Riva M., Neuman S.P Time [s] Heterogeneous fluvial aquifer in the Neckar river valley near Tübingen, Germany. The aquifer consists mainly of sandy gravel material. Prior works at the site include: a) Geostatistical analyses b) Modeling of tracer tests c) Stochastic delineation of wellprotecion zones
35 Field scale application ME-EnKF modeling 35 s c s c [ m] [ m] t [ s] Pumping well: B4.16 c) a) B5 Pumping well: B t s [ ] B1 B3 B4 B5 B3 B1 B t s Measurement errors are considered Gaussian with zero mean and standard deviation of 1-3 m. Conditioning data set is composed by 15 selected drawdown measurements for each well taken at 4 observation wells (e.g., B1, B3, B4, and B5 when pumping from B) b) Pumping well: B3 [ ] B3 B1 B4 B5 Assimilation of drawdown data by considering pumping test in B & in B3. The initial log-transmissivity mean field is set to a constant value of = (T is in m /s) (from previous analyses stochastic well testing). The initial covariance is stationary and set according to an exponential variogram function with sill 1.5 and integral scale.5 m (from previous analyses on vertically integrated conductivity data).
36 Field application prior field (pumping from B) 36 Corrected drawdown [m] Corrected drawdown [m] Observation: B Time [s] Observation: B4 Time [s] Guadagnini A., Panzeri M., Riva M., Neuman S.P. Corrected drawdown [m] Corrected drawdown [m] Observation: B Time [s] Observation: B5 Time [s]
 σ ( ) V t = x Mean field variance Mean")
![field variance t [s] MEs NMC = 5 4 t x 197. 19. 187.4 18.](/docs-images/92/108760505/images/37-2.jpg "6 177.8 173. 168. 163.4 B4 B4 37 158.6 158.6 163.4 168.")

37 Field application ME- & MC-EnKF modeling V N 1 i N i= 1 ( ) σ ( ) V t = x Mean field variance Mean field variance t [s] MEs NMC = 5 4 t x B4 B x1 x 1 B1 B5 B B5 B B1 B3 B3 T k = T k = 1 T k = 1 T k = 15 4 m T k =


38 Field scale application ME-EnKF modeling B5 B B4 B B B 168. B3 B3 B B Mean field variance Mean field variance x x1 x 1 T k = T k = 1 T k = 1 T k = 15 4 m T k =
39 Field scale application ME-EnKF modeling V t [ s] N 1 i N i= 1 ( ) σ ( ) V t = x t
40 Field application Validation (pumping from B4) 4 Corrected drawdown [m] Validation: B Time [s] Corrected drawdown [m] Validation: B Time [s] Corrected drawdown [m] Validation: B3 Time [s] Guadagnini A., Panzeri M., Riva M., Neuman S.P. Corrected drawdown [m] Validation: B5 Time [s]
41 Field application Validation (pumping from B4) 41 s B1 [ m] Prior After assimilation of B After assimilation of B and B t [ s] [ s] t t [ s] s B [ m] Prior After assimilation of B After assimilation of B and B t [ s] [ s] t t [ s]
42 Field scale application Validation and reciprocity 4 Corrected drawdown / Q Corrected drawdown [m] Time [s] Pump from B4 Observation: B5 Assimilation set: B B3 B B3 B4 Time [s] Corrected drawdown / Q Corrected drawdown [m] Time [s] Pump from B3 Observation: B5 Assimilation set: B B4 B5 B3 B5 Time [s]
![Field scale application Comparisons 43 Elevation [m ASL] 36 35.5 35 34.5 34 33.5 33 3.5 3 31.5 31 1.E-5 1.E-4 1.E-3 1.E- 1.](/docs-images/92/108760505/images/43-1.jpg "E-1 K [m/s] B4 31 flowmeter K values from all B and F wells were locally upscaled to obtain T G =. 1 [m /s] Variance (ln T) = 1.5 Integral scale =.")
43 Field scale application Comparisons 43 Elevation [m ASL] E-5 1.E-4 1.E-3 1.E- 1.E-1 K [m/s] B4 31 flowmeter K values from all B and F wells were locally upscaled to obtain T G =. 1 [m /s] Variance (ln T) = 1.5 Integral scale =.5 m B1 B B3 B4 B5 multiscale geostatistical analysis Riva et al. [8] ME-EnKF Riva et al. [8] Multiscale geostatistical analysis based on impeller flowmeter data and stochastic type-curves interpretation of pumping tests Estimated = ln T Estimated = ln T Assimilation set: B Assimilation set: B + B4 B1 B B3 B4 B5
44 Conclusions 44 Coupling (nonlocal) conditional MEs of groundwater flow with EnKF obviates the need for: (a) computationally intensive MC simulations; (b) batch inverse solution Combining EnKF and MEs renders the estimation of variogram parameters less critical than in batch inverse solution (not shown in details here) Increasing the log-conductivity error measurement variance by one order of magnitude brought about only a minor deterioration in the quality of the parameter estimates Assimilation of early time hydraulic head measurements resulted in an increased rate of improvement of parameter estimation without underestimating their variance.
45 Conclusions 45 Traditional MC-based EnKF yields reliable results when NMC 1, Filter inbreeding affects the MC simulation performed with a low number of model realization. The ME-based assimilation is not affected by filter inbreeding in the considered case. Results from field scale application are promising.
DATA ASSIMILATION FOR COMPLEX SUBSURFACE FLOW FIELDS
 POLITECNICO DI MILANO Department of Civil and Environmental Engineering Doctoral Programme in Environmental and Infrastructure Engineering XXVI Cycle DATA ASSIMILATION FOR COMPLEX SUBSURFACE FLOW FIELDS
POLITECNICO DI MILANO Department of Civil and Environmental Engineering Doctoral Programme in Environmental and Infrastructure Engineering XXVI Cycle DATA ASSIMILATION FOR COMPLEX SUBSURFACE FLOW FIELDS
Deterministic solution of stochastic groundwater flow equations by nonlocalfiniteelements A. Guadagnini^ & S.P. Neuman^
 Deterministic solution of stochastic groundwater flow equations by nonlocalfiniteelements A. Guadagnini^ & S.P. Neuman^ Milano, Italy; ^Department of. Hydrology & Water Resources, The University ofarizona,
Deterministic solution of stochastic groundwater flow equations by nonlocalfiniteelements A. Guadagnini^ & S.P. Neuman^ Milano, Italy; ^Department of. Hydrology & Water Resources, The University ofarizona,
11280 Electrical Resistivity Tomography Time-lapse Monitoring of Three-dimensional Synthetic Tracer Test Experiments
 11280 Electrical Resistivity Tomography Time-lapse Monitoring of Three-dimensional Synthetic Tracer Test Experiments M. Camporese (University of Padova), G. Cassiani* (University of Padova), R. Deiana
11280 Electrical Resistivity Tomography Time-lapse Monitoring of Three-dimensional Synthetic Tracer Test Experiments M. Camporese (University of Padova), G. Cassiani* (University of Padova), R. Deiana
Type-curve estimation of statistical heterogeneity
 WATER RESOURCES RESEARCH, VOL. 40,, doi:10.1029/2003wr002405, 2004 Type-curve estimation of statistical heterogeneity Shlomo P. Neuman Department of Hydrology and Water Resources, University of Arizona,
WATER RESOURCES RESEARCH, VOL. 40,, doi:10.1029/2003wr002405, 2004 Type-curve estimation of statistical heterogeneity Shlomo P. Neuman Department of Hydrology and Water Resources, University of Arizona,
APPLICATION OF THE TRUNCATED PLURIGAUSSIAN METHOD TO DELINEATE HYDROFACIES DISTRIBUTION IN HETEROGENEOUS AQUIFERS
 XIX International Conference on Water Resources CMWR 2012 University of Illinois at Urbana-Champaign June 17-22, 2012 APPLICATION OF THE TRUNCATED PLURIGAUSSIAN METHOD TO DELINEATE HYDROFACIES DISTRIBUTION
XIX International Conference on Water Resources CMWR 2012 University of Illinois at Urbana-Champaign June 17-22, 2012 APPLICATION OF THE TRUNCATED PLURIGAUSSIAN METHOD TO DELINEATE HYDROFACIES DISTRIBUTION
Type curve interpretation of late-time pumping test data in randomly heterogeneous aquifers
 WATER RESOURCES RESEARCH, VOL. 43,, doi:10.1029/2007wr005871, 2007 Type curve interpretation of late-time pumping test data in randomly heterogeneous aquifers Shlomo P. Neuman, 1 Ayelet Blattstein, 1,2
WATER RESOURCES RESEARCH, VOL. 43,, doi:10.1029/2007wr005871, 2007 Type curve interpretation of late-time pumping test data in randomly heterogeneous aquifers Shlomo P. Neuman, 1 Ayelet Blattstein, 1,2
A Stochastic Collocation based. for Data Assimilation
 A Stochastic Collocation based Kalman Filter (SCKF) for Data Assimilation Lingzao Zeng and Dongxiao Zhang University of Southern California August 11, 2009 Los Angeles Outline Introduction SCKF Algorithm
A Stochastic Collocation based Kalman Filter (SCKF) for Data Assimilation Lingzao Zeng and Dongxiao Zhang University of Southern California August 11, 2009 Los Angeles Outline Introduction SCKF Algorithm
Lagrangian Data Assimilation and Manifold Detection for a Point-Vortex Model. David Darmon, AMSC Kayo Ide, AOSC, IPST, CSCAMM, ESSIC
 Lagrangian Data Assimilation and Manifold Detection for a Point-Vortex Model David Darmon, AMSC Kayo Ide, AOSC, IPST, CSCAMM, ESSIC Background Data Assimilation Iterative process Forecast Analysis Background
Lagrangian Data Assimilation and Manifold Detection for a Point-Vortex Model David Darmon, AMSC Kayo Ide, AOSC, IPST, CSCAMM, ESSIC Background Data Assimilation Iterative process Forecast Analysis Background
Hydraulic tomography: Development of a new aquifer test method
 WATER RESOURCES RESEARCH, VOL. 36, NO. 8, PAGES 2095 2105, AUGUST 2000 Hydraulic tomography: Development of a new aquifer test method T.-C. Jim Yeh and Shuyun Liu Department of Hydrology and Water Resources,
WATER RESOURCES RESEARCH, VOL. 36, NO. 8, PAGES 2095 2105, AUGUST 2000 Hydraulic tomography: Development of a new aquifer test method T.-C. Jim Yeh and Shuyun Liu Department of Hydrology and Water Resources,
6. GRID DESIGN AND ACCURACY IN NUMERICAL SIMULATIONS OF VARIABLY SATURATED FLOW IN RANDOM MEDIA: REVIEW AND NUMERICAL ANALYSIS
 Harter Dissertation - 1994-132 6. GRID DESIGN AND ACCURACY IN NUMERICAL SIMULATIONS OF VARIABLY SATURATED FLOW IN RANDOM MEDIA: REVIEW AND NUMERICAL ANALYSIS 6.1 Introduction Most numerical stochastic
Harter Dissertation - 1994-132 6. GRID DESIGN AND ACCURACY IN NUMERICAL SIMULATIONS OF VARIABLY SATURATED FLOW IN RANDOM MEDIA: REVIEW AND NUMERICAL ANALYSIS 6.1 Introduction Most numerical stochastic
Simple closed form formulas for predicting groundwater flow model uncertainty in complex, heterogeneous trending media
 WATER RESOURCES RESEARCH, VOL. 4,, doi:0.029/2005wr00443, 2005 Simple closed form formulas for predicting groundwater flow model uncertainty in complex, heterogeneous trending media Chuen-Fa Ni and Shu-Guang
WATER RESOURCES RESEARCH, VOL. 4,, doi:0.029/2005wr00443, 2005 Simple closed form formulas for predicting groundwater flow model uncertainty in complex, heterogeneous trending media Chuen-Fa Ni and Shu-Guang
Simultaneous use of hydrogeological and geophysical data for groundwater protection zone delineation by co-conditional stochastic simulations
 Simultaneous use of hydrogeological and geophysical data for groundwater protection zone delineation by co-conditional stochastic simulations C. Rentier,, A. Dassargues Hydrogeology Group, Departement
Simultaneous use of hydrogeological and geophysical data for groundwater protection zone delineation by co-conditional stochastic simulations C. Rentier,, A. Dassargues Hydrogeology Group, Departement
Stochastic methods for aquifer protection and management
 Stochastic methods for aquifer protection and management Dr Adrian Butler Department of Civil & Environmental Engineering G-WADI 07 International Workshop on Groundwater Modeling for Arid and Semi-arid
Stochastic methods for aquifer protection and management Dr Adrian Butler Department of Civil & Environmental Engineering G-WADI 07 International Workshop on Groundwater Modeling for Arid and Semi-arid
Application of the Ensemble Kalman Filter to History Matching
 Application of the Ensemble Kalman Filter to History Matching Presented at Texas A&M, November 16,2010 Outline Philosophy EnKF for Data Assimilation Field History Match Using EnKF with Covariance Localization
Application of the Ensemble Kalman Filter to History Matching Presented at Texas A&M, November 16,2010 Outline Philosophy EnKF for Data Assimilation Field History Match Using EnKF with Covariance Localization
Reactive Transport in Porous Media
 Reactive Transport in Porous Media Daniel M. Tartakovsky Department of Mechanical & Aerospace Engineering University of California, San Diego Alberto Guadagnini, Politecnico di Milano, Italy Peter C. Lichtner,
Reactive Transport in Porous Media Daniel M. Tartakovsky Department of Mechanical & Aerospace Engineering University of California, San Diego Alberto Guadagnini, Politecnico di Milano, Italy Peter C. Lichtner,
Uncertainty quantification for flow in highly heterogeneous porous media
 695 Uncertainty quantification for flow in highly heterogeneous porous media D. Xiu and D.M. Tartakovsky a a Theoretical Division, Los Alamos National Laboratory, Mathematical Modeling and Analysis Group
695 Uncertainty quantification for flow in highly heterogeneous porous media D. Xiu and D.M. Tartakovsky a a Theoretical Division, Los Alamos National Laboratory, Mathematical Modeling and Analysis Group
Uncertainty propagation in a sequential model for flood forecasting
 Predictions in Ungauged Basins: Promise and Progress (Proceedings of symposium S7 held during the Seventh IAHS Scientific Assembly at Foz do Iguaçu, Brazil, April 2005). IAHS Publ. 303, 2006. 177 Uncertainty
Predictions in Ungauged Basins: Promise and Progress (Proceedings of symposium S7 held during the Seventh IAHS Scientific Assembly at Foz do Iguaçu, Brazil, April 2005). IAHS Publ. 303, 2006. 177 Uncertainty
The Ensemble Kalman Filter:
 p.1 The Ensemble Kalman Filter: Theoretical formulation and practical implementation Geir Evensen Norsk Hydro Research Centre, Bergen, Norway Based on Evensen 23, Ocean Dynamics, Vol 53, No 4 p.2 The Ensemble
p.1 The Ensemble Kalman Filter: Theoretical formulation and practical implementation Geir Evensen Norsk Hydro Research Centre, Bergen, Norway Based on Evensen 23, Ocean Dynamics, Vol 53, No 4 p.2 The Ensemble
MOMENT DIFFERENTIAL EQUATIONS FOR FLOW IN HIGHLY HETEROGENEOUS POROUS MEDIA
 MOMENT DIFFERENTIAL EQUATIONS FOR FLOW IN HIGHLY HETEROGENEOUS POROUS MEDIA C.L. WINTER Mathematical Modeling & Analysis Group and Center for Nonlinear Studies, Los Alamos National Laboratory, Los Alamos,
MOMENT DIFFERENTIAL EQUATIONS FOR FLOW IN HIGHLY HETEROGENEOUS POROUS MEDIA C.L. WINTER Mathematical Modeling & Analysis Group and Center for Nonlinear Studies, Los Alamos National Laboratory, Los Alamos,
Conditional moment analysis of steady state unsaturated flow in bounded, randomly heterogeneous soils
 WATR RSOURCS RSARCH, VOL. 38, NO. 4, 10.109/001WR00078, 00 Conditional moment analysis of steady state unsaturated flow in bounded, randomly heterogeneous soils himing Lu and Shlomo P. Neuman Department
WATR RSOURCS RSARCH, VOL. 38, NO. 4, 10.109/001WR00078, 00 Conditional moment analysis of steady state unsaturated flow in bounded, randomly heterogeneous soils himing Lu and Shlomo P. Neuman Department
Lagrangian Data Assimilation and Its Application to Geophysical Fluid Flows
 Lagrangian Data Assimilation and Its Application to Geophysical Fluid Flows Laura Slivinski June, 3 Laura Slivinski (Brown University) Lagrangian Data Assimilation June, 3 / 3 Data Assimilation Setup:
Lagrangian Data Assimilation and Its Application to Geophysical Fluid Flows Laura Slivinski June, 3 Laura Slivinski (Brown University) Lagrangian Data Assimilation June, 3 / 3 Data Assimilation Setup:
Assessment of Hydraulic Conductivity Upscaling Techniques and. Associated Uncertainty
 CMWRXVI Assessment of Hydraulic Conductivity Upscaling Techniques and Associated Uncertainty FARAG BOTROS,, 4, AHMED HASSAN 3, 4, AND GREG POHLL Division of Hydrologic Sciences, University of Nevada, Reno
CMWRXVI Assessment of Hydraulic Conductivity Upscaling Techniques and Associated Uncertainty FARAG BOTROS,, 4, AHMED HASSAN 3, 4, AND GREG POHLL Division of Hydrologic Sciences, University of Nevada, Reno
Hierarchical Bayes Ensemble Kalman Filter
 Hierarchical Bayes Ensemble Kalman Filter M Tsyrulnikov and A Rakitko HydroMetCenter of Russia Wrocław, 7 Sep 2015 M Tsyrulnikov and A Rakitko (HMC) Hierarchical Bayes Ensemble Kalman Filter Wrocław, 7
Hierarchical Bayes Ensemble Kalman Filter M Tsyrulnikov and A Rakitko HydroMetCenter of Russia Wrocław, 7 Sep 2015 M Tsyrulnikov and A Rakitko (HMC) Hierarchical Bayes Ensemble Kalman Filter Wrocław, 7
Inverting hydraulic heads in an alluvial aquifer constrained with ERT data through MPS and PPM: a case study
 Inverting hydraulic heads in an alluvial aquifer constrained with ERT data through MPS and PPM: a case study Hermans T. 1, Scheidt C. 2, Caers J. 2, Nguyen F. 1 1 University of Liege, Applied Geophysics
Inverting hydraulic heads in an alluvial aquifer constrained with ERT data through MPS and PPM: a case study Hermans T. 1, Scheidt C. 2, Caers J. 2, Nguyen F. 1 1 University of Liege, Applied Geophysics
Enhancing information transfer from observations to unobserved state variables for mesoscale radar data assimilation
 Enhancing information transfer from observations to unobserved state variables for mesoscale radar data assimilation Weiguang Chang and Isztar Zawadzki Department of Atmospheric and Oceanic Sciences Faculty
Enhancing information transfer from observations to unobserved state variables for mesoscale radar data assimilation Weiguang Chang and Isztar Zawadzki Department of Atmospheric and Oceanic Sciences Faculty
A hybrid Marquardt-Simulated Annealing method for solving the groundwater inverse problem
 Calibration and Reliability in Groundwater Modelling (Proceedings of the ModelCARE 99 Conference held at Zurich, Switzerland, September 1999). IAHS Publ. no. 265, 2000. 157 A hybrid Marquardt-Simulated
Calibration and Reliability in Groundwater Modelling (Proceedings of the ModelCARE 99 Conference held at Zurich, Switzerland, September 1999). IAHS Publ. no. 265, 2000. 157 A hybrid Marquardt-Simulated
Best Unbiased Ensemble Linearization and the Quasi-Linear Kalman Ensemble Generator
 W. Nowak a,b Best Unbiased Ensemble Linearization and the Quasi-Linear Kalman Ensemble Generator Stuttgart, February 2009 a Institute of Hydraulic Engineering (LH 2 ), University of Stuttgart, Pfaffenwaldring
W. Nowak a,b Best Unbiased Ensemble Linearization and the Quasi-Linear Kalman Ensemble Generator Stuttgart, February 2009 a Institute of Hydraulic Engineering (LH 2 ), University of Stuttgart, Pfaffenwaldring
Structural Surface Uncertainty Modeling and Updating Using the Ensemble Kalman Filter
 Structural Surface Uncertainty Modeling and Updating Using the Ensemble Kalman Filter A. Seiler, Nansen Environmental and Remote Sensing Center and Statoil; S.I. Aanonsen, Center for Integrated Petroleum
Structural Surface Uncertainty Modeling and Updating Using the Ensemble Kalman Filter A. Seiler, Nansen Environmental and Remote Sensing Center and Statoil; S.I. Aanonsen, Center for Integrated Petroleum
Monte Carlo Simulation. CWR 6536 Stochastic Subsurface Hydrology
 Monte Carlo Simulation CWR 6536 Stochastic Subsurface Hydrology Steps in Monte Carlo Simulation Create input sample space with known distribution, e.g. ensemble of all possible combinations of v, D, q,
Monte Carlo Simulation CWR 6536 Stochastic Subsurface Hydrology Steps in Monte Carlo Simulation Create input sample space with known distribution, e.g. ensemble of all possible combinations of v, D, q,
Ensemble Kalman Filter
 Ensemble Kalman Filter Geir Evensen and Laurent Bertino Hydro Research Centre, Bergen, Norway, Nansen Environmental and Remote Sensing Center, Bergen, Norway The Ensemble Kalman Filter (EnKF) Represents
Ensemble Kalman Filter Geir Evensen and Laurent Bertino Hydro Research Centre, Bergen, Norway, Nansen Environmental and Remote Sensing Center, Bergen, Norway The Ensemble Kalman Filter (EnKF) Represents
DATA ASSIMILATION FOR FLOOD FORECASTING
 DATA ASSIMILATION FOR FLOOD FORECASTING Arnold Heemin Delft University of Technology 09/16/14 1 Data assimilation is the incorporation of measurement into a numerical model to improve the model results
DATA ASSIMILATION FOR FLOOD FORECASTING Arnold Heemin Delft University of Technology 09/16/14 1 Data assimilation is the incorporation of measurement into a numerical model to improve the model results
LARGE-SCALE TRAFFIC STATE ESTIMATION
 Hans van Lint, Yufei Yuan & Friso Scholten A localized deterministic Ensemble Kalman Filter LARGE-SCALE TRAFFIC STATE ESTIMATION CONTENTS Intro: need for large-scale traffic state estimation Some Kalman
Hans van Lint, Yufei Yuan & Friso Scholten A localized deterministic Ensemble Kalman Filter LARGE-SCALE TRAFFIC STATE ESTIMATION CONTENTS Intro: need for large-scale traffic state estimation Some Kalman
Robust Ensemble Filtering With Improved Storm Surge Forecasting
 Robust Ensemble Filtering With Improved Storm Surge Forecasting U. Altaf, T. Buttler, X. Luo, C. Dawson, T. Mao, I.Hoteit Meteo France, Toulouse, Nov 13, 2012 Project Ensemble data assimilation for storm
Robust Ensemble Filtering With Improved Storm Surge Forecasting U. Altaf, T. Buttler, X. Luo, C. Dawson, T. Mao, I.Hoteit Meteo France, Toulouse, Nov 13, 2012 Project Ensemble data assimilation for storm
Technical note: Analytical drawdown solution for steady-state pumping tests in two-dimensional isotropic heterogeneous aquifers
 Hydrol. Earth Syst. Sci., 0, 655 667, 06 www.hydrol-earth-syst-sci.net/0/655/06/ doi:0.594/hess-0-655-06 Authors 06. CC Attribution 3.0 License. Technical note: Analytical drawdown solution for steady-state
Hydrol. Earth Syst. Sci., 0, 655 667, 06 www.hydrol-earth-syst-sci.net/0/655/06/ doi:0.594/hess-0-655-06 Authors 06. CC Attribution 3.0 License. Technical note: Analytical drawdown solution for steady-state
Data assimilation in the MIKE 11 Flood Forecasting system using Kalman filtering
 Water Resources Systems Hydrological Risk, Management and Development (Proceedings of symposium IlS02b held during IUGG2003 al Sapporo. July 2003). IAHS Publ. no. 281. 2003. 75 Data assimilation in the
Water Resources Systems Hydrological Risk, Management and Development (Proceedings of symposium IlS02b held during IUGG2003 al Sapporo. July 2003). IAHS Publ. no. 281. 2003. 75 Data assimilation in the
Methods of Data Assimilation and Comparisons for Lagrangian Data
 Methods of Data Assimilation and Comparisons for Lagrangian Data Chris Jones, Warwick and UNC-CH Kayo Ide, UCLA Andrew Stuart, Jochen Voss, Warwick Guillaume Vernieres, UNC-CH Amarjit Budiraja, UNC-CH
Methods of Data Assimilation and Comparisons for Lagrangian Data Chris Jones, Warwick and UNC-CH Kayo Ide, UCLA Andrew Stuart, Jochen Voss, Warwick Guillaume Vernieres, UNC-CH Amarjit Budiraja, UNC-CH
Data assimilation in high dimensions
 Data assimilation in high dimensions David Kelly Courant Institute New York University New York NY www.dtbkelly.com February 12, 2015 Graduate seminar, CIMS David Kelly (CIMS) Data assimilation February
Data assimilation in high dimensions David Kelly Courant Institute New York University New York NY www.dtbkelly.com February 12, 2015 Graduate seminar, CIMS David Kelly (CIMS) Data assimilation February
Dynamic System Identification using HDMR-Bayesian Technique
 Dynamic System Identification using HDMR-Bayesian Technique *Shereena O A 1) and Dr. B N Rao 2) 1), 2) Department of Civil Engineering, IIT Madras, Chennai 600036, Tamil Nadu, India 1) ce14d020@smail.iitm.ac.in
Dynamic System Identification using HDMR-Bayesian Technique *Shereena O A 1) and Dr. B N Rao 2) 1), 2) Department of Civil Engineering, IIT Madras, Chennai 600036, Tamil Nadu, India 1) ce14d020@smail.iitm.ac.in
Improved inverse modeling for flow and transport in subsurface media: Combined parameter and state estimation
 GEOPHYSICAL RESEARCH LETTERS, VOL. 32, L18408, doi:10.1029/2005gl023940, 2005 Improved inverse modeling for flow and transport in subsurface media: Combined parameter and state estimation Jasper A. Vrugt,
GEOPHYSICAL RESEARCH LETTERS, VOL. 32, L18408, doi:10.1029/2005gl023940, 2005 Improved inverse modeling for flow and transport in subsurface media: Combined parameter and state estimation Jasper A. Vrugt,
Aspects of the practical application of ensemble-based Kalman filters
 Aspects of the practical application of ensemble-based Kalman filters Lars Nerger Alfred Wegener Institute for Polar and Marine Research Bremerhaven, Germany and Bremen Supercomputing Competence Center
Aspects of the practical application of ensemble-based Kalman filters Lars Nerger Alfred Wegener Institute for Polar and Marine Research Bremerhaven, Germany and Bremen Supercomputing Competence Center
Inverse Modelling for Flow and Transport in Porous Media
 Inverse Modelling for Flow and Transport in Porous Media Mauro Giudici 1 Dipartimento di Scienze della Terra, Sezione di Geofisica, Università degli Studi di Milano, Milano, Italy Lecture given at the
Inverse Modelling for Flow and Transport in Porous Media Mauro Giudici 1 Dipartimento di Scienze della Terra, Sezione di Geofisica, Università degli Studi di Milano, Milano, Italy Lecture given at the
Groundwater Resources Management under. Uncertainty Harald Kunstmann*, Wolfgang Kinzelbach* & Gerrit van Tender**
 Groundwater Resources Management under Uncertainty Harald Kunstmann*, Wolfgang Kinzelbach* & Gerrit van Tender**, C/f &OP3 Zwnc/?, Email: kunstmann@ihw. baum. ethz. ch Abstract Groundwater resources and
Groundwater Resources Management under Uncertainty Harald Kunstmann*, Wolfgang Kinzelbach* & Gerrit van Tender**, C/f &OP3 Zwnc/?, Email: kunstmann@ihw. baum. ethz. ch Abstract Groundwater resources and
The Ensemble Kalman Filter:
 p.1 The Ensemble Kalman Filter: Theoretical formulation and practical implementation Geir Evensen Norsk Hydro Research Centre, Bergen, Norway Based on Evensen, Ocean Dynamics, Vol 5, No p. The Ensemble
p.1 The Ensemble Kalman Filter: Theoretical formulation and practical implementation Geir Evensen Norsk Hydro Research Centre, Bergen, Norway Based on Evensen, Ocean Dynamics, Vol 5, No p. The Ensemble
Short tutorial on data assimilation
 Mitglied der Helmholtz-Gemeinschaft Short tutorial on data assimilation 23 June 2015 Wolfgang Kurtz & Harrie-Jan Hendricks Franssen Institute of Bio- and Geosciences IBG-3 (Agrosphere), Forschungszentrum
Mitglied der Helmholtz-Gemeinschaft Short tutorial on data assimilation 23 June 2015 Wolfgang Kurtz & Harrie-Jan Hendricks Franssen Institute of Bio- and Geosciences IBG-3 (Agrosphere), Forschungszentrum
A new Hierarchical Bayes approach to ensemble-variational data assimilation
 A new Hierarchical Bayes approach to ensemble-variational data assimilation Michael Tsyrulnikov and Alexander Rakitko HydroMetCenter of Russia College Park, 20 Oct 2014 Michael Tsyrulnikov and Alexander
A new Hierarchical Bayes approach to ensemble-variational data assimilation Michael Tsyrulnikov and Alexander Rakitko HydroMetCenter of Russia College Park, 20 Oct 2014 Michael Tsyrulnikov and Alexander
Stochastic Collocation Methods for Polynomial Chaos: Analysis and Applications
 Stochastic Collocation Methods for Polynomial Chaos: Analysis and Applications Dongbin Xiu Department of Mathematics, Purdue University Support: AFOSR FA955-8-1-353 (Computational Math) SF CAREER DMS-64535
Stochastic Collocation Methods for Polynomial Chaos: Analysis and Applications Dongbin Xiu Department of Mathematics, Purdue University Support: AFOSR FA955-8-1-353 (Computational Math) SF CAREER DMS-64535
Kalman Filter and Ensemble Kalman Filter
 Kalman Filter and Ensemble Kalman Filter 1 Motivation Ensemble forecasting : Provides flow-dependent estimate of uncertainty of the forecast. Data assimilation : requires information about uncertainty
Kalman Filter and Ensemble Kalman Filter 1 Motivation Ensemble forecasting : Provides flow-dependent estimate of uncertainty of the forecast. Data assimilation : requires information about uncertainty
Geostatistical History Matching coupled with Adaptive Stochastic Sampling: A zonation-based approach using Direct Sequential Simulation
 Geostatistical History Matching coupled with Adaptive Stochastic Sampling: A zonation-based approach using Direct Sequential Simulation Eduardo Barrela* Instituto Superior Técnico, Av. Rovisco Pais 1,
Geostatistical History Matching coupled with Adaptive Stochastic Sampling: A zonation-based approach using Direct Sequential Simulation Eduardo Barrela* Instituto Superior Técnico, Av. Rovisco Pais 1,
Ensemble square-root filters
 Ensemble square-root filters MICHAEL K. TIPPETT International Research Institute for climate prediction, Palisades, New Yor JEFFREY L. ANDERSON GFDL, Princeton, New Jersy CRAIG H. BISHOP Naval Research
Ensemble square-root filters MICHAEL K. TIPPETT International Research Institute for climate prediction, Palisades, New Yor JEFFREY L. ANDERSON GFDL, Princeton, New Jersy CRAIG H. BISHOP Naval Research
Development of Stochastic Artificial Neural Networks for Hydrological Prediction
 Development of Stochastic Artificial Neural Networks for Hydrological Prediction G. B. Kingston, M. F. Lambert and H. R. Maier Centre for Applied Modelling in Water Engineering, School of Civil and Environmental
Development of Stochastic Artificial Neural Networks for Hydrological Prediction G. B. Kingston, M. F. Lambert and H. R. Maier Centre for Applied Modelling in Water Engineering, School of Civil and Environmental
Performance of ensemble Kalman filters with small ensembles
 Performance of ensemble Kalman filters with small ensembles Xin T Tong Joint work with Andrew J. Majda National University of Singapore Sunday 28 th May, 2017 X.Tong EnKF performance 1 / 31 Content Ensemble
Performance of ensemble Kalman filters with small ensembles Xin T Tong Joint work with Andrew J. Majda National University of Singapore Sunday 28 th May, 2017 X.Tong EnKF performance 1 / 31 Content Ensemble
Review of permeability in buried-valley aquifers: Centimeter to kilometer scales
 Review of permeability in buried-valley aquifers: Centimeter to kilometer scales R. W. RITZI, Z. DAI & D. F. DOMINIC Department of Geological Sciences, Wright State University, Dayton, Ohio 45435, USA
Review of permeability in buried-valley aquifers: Centimeter to kilometer scales R. W. RITZI, Z. DAI & D. F. DOMINIC Department of Geological Sciences, Wright State University, Dayton, Ohio 45435, USA
Environment Canada s Regional Ensemble Kalman Filter
 Environment Canada s Regional Ensemble Kalman Filter May 19, 2014 Seung-Jong Baek, Luc Fillion, Kao-Shen Chung, and Peter Houtekamer Meteorological Research Division, Environment Canada, Dorval, Quebec
Environment Canada s Regional Ensemble Kalman Filter May 19, 2014 Seung-Jong Baek, Luc Fillion, Kao-Shen Chung, and Peter Houtekamer Meteorological Research Division, Environment Canada, Dorval, Quebec
Fundamentals of Data Assimila1on
 014 GSI Community Tutorial NCAR Foothills Campus, Boulder, CO July 14-16, 014 Fundamentals of Data Assimila1on Milija Zupanski Cooperative Institute for Research in the Atmosphere Colorado State University
014 GSI Community Tutorial NCAR Foothills Campus, Boulder, CO July 14-16, 014 Fundamentals of Data Assimila1on Milija Zupanski Cooperative Institute for Research in the Atmosphere Colorado State University
The Generalized Likelihood Uncertainty Estimation methodology
 CHAPTER 4 The Generalized Likelihood Uncertainty Estimation methodology Calibration and uncertainty estimation based upon a statistical framework is aimed at finding an optimal set of models, parameters
CHAPTER 4 The Generalized Likelihood Uncertainty Estimation methodology Calibration and uncertainty estimation based upon a statistical framework is aimed at finding an optimal set of models, parameters
Ensembles and Particle Filters for Ocean Data Assimilation
 DISTRIBUTION STATEMENT A. Approved for public release; distribution is unlimited. Ensembles and Particle Filters for Ocean Data Assimilation Robert N. Miller College of Oceanic and Atmospheric Sciences
DISTRIBUTION STATEMENT A. Approved for public release; distribution is unlimited. Ensembles and Particle Filters for Ocean Data Assimilation Robert N. Miller College of Oceanic and Atmospheric Sciences
Capturing aquifer heterogeneity: Comparison of approaches through controlled sandbox experiments
 WATER RESOURCES RESEARCH, VOL. 47, W09514, doi:10.1029/2011wr010429, 2011 Capturing aquifer heterogeneity: Comparison of approaches through controlled sandbox experiments Steven J. Berg 1 and Walter A.
WATER RESOURCES RESEARCH, VOL. 47, W09514, doi:10.1029/2011wr010429, 2011 Capturing aquifer heterogeneity: Comparison of approaches through controlled sandbox experiments Steven J. Berg 1 and Walter A.
ESTIMATING CORRELATIONS FROM A COASTAL OCEAN MODEL FOR LOCALIZING AN ENSEMBLE TRANSFORM KALMAN FILTER
 ESTIMATING CORRELATIONS FROM A COASTAL OCEAN MODEL FOR LOCALIZING AN ENSEMBLE TRANSFORM KALMAN FILTER Jonathan Poterjoy National Weather Center Research Experiences for Undergraduates, Norman, Oklahoma
ESTIMATING CORRELATIONS FROM A COASTAL OCEAN MODEL FOR LOCALIZING AN ENSEMBLE TRANSFORM KALMAN FILTER Jonathan Poterjoy National Weather Center Research Experiences for Undergraduates, Norman, Oklahoma
PUBLICATIONS. Water Resources Research
 PUBLICATIONS RESEARCH ARTICLE Special Section: Modeling highly heterogeneous aquifers: Lessons learned in the last 3 years from the MADE experiments and others Characterization of non-gaussian conductivities
PUBLICATIONS RESEARCH ARTICLE Special Section: Modeling highly heterogeneous aquifers: Lessons learned in the last 3 years from the MADE experiments and others Characterization of non-gaussian conductivities
The Kalman Filter ImPr Talk
 The Kalman Filter ImPr Talk Ged Ridgway Centre for Medical Image Computing November, 2006 Outline What is the Kalman Filter? State Space Models Kalman Filter Overview Bayesian Updating of Estimates Kalman
The Kalman Filter ImPr Talk Ged Ridgway Centre for Medical Image Computing November, 2006 Outline What is the Kalman Filter? State Space Models Kalman Filter Overview Bayesian Updating of Estimates Kalman
A Note on the Particle Filter with Posterior Gaussian Resampling
 Tellus (6), 8A, 46 46 Copyright C Blackwell Munksgaard, 6 Printed in Singapore. All rights reserved TELLUS A Note on the Particle Filter with Posterior Gaussian Resampling By X. XIONG 1,I.M.NAVON 1,2 and
Tellus (6), 8A, 46 46 Copyright C Blackwell Munksgaard, 6 Printed in Singapore. All rights reserved TELLUS A Note on the Particle Filter with Posterior Gaussian Resampling By X. XIONG 1,I.M.NAVON 1,2 and
Best unbiased ensemble linearization and the quasi-linear Kalman ensemble generator
 WATER RESOURCES RESEARCH, VOL. 45,, doi:10.1029/2008wr007328, 2009 Best unbiased ensemble linearization and the quasi-linear Kalman ensemble generator W. Nowak 1,2 Received 1 August 2008; revised 23 February
WATER RESOURCES RESEARCH, VOL. 45,, doi:10.1029/2008wr007328, 2009 Best unbiased ensemble linearization and the quasi-linear Kalman ensemble generator W. Nowak 1,2 Received 1 August 2008; revised 23 February
BME STUDIES OF STOCHASTIC DIFFERENTIAL EQUATIONS REPRESENTING PHYSICAL LAW
 7 VIII. BME STUDIES OF STOCHASTIC DIFFERENTIAL EQUATIONS REPRESENTING PHYSICAL LAW A wide variety of natural processes are described using physical laws. A physical law may be expressed by means of an
7 VIII. BME STUDIES OF STOCHASTIC DIFFERENTIAL EQUATIONS REPRESENTING PHYSICAL LAW A wide variety of natural processes are described using physical laws. A physical law may be expressed by means of an
Towards a probabilistic hydrological forecasting and data assimilation system. Henrik Madsen DHI, Denmark
 Towards a probabilistic hydrological forecasting and data assimilation system Henrik Madsen DHI, Denmark Outline Hydrological forecasting Data assimilation framework Data assimilation experiments Concluding
Towards a probabilistic hydrological forecasting and data assimilation system Henrik Madsen DHI, Denmark Outline Hydrological forecasting Data assimilation framework Data assimilation experiments Concluding
Fundamentals of Data Assimilation
 National Center for Atmospheric Research, Boulder, CO USA GSI Data Assimilation Tutorial - June 28-30, 2010 Acknowledgments and References WRFDA Overview (WRF Tutorial Lectures, H. Huang and D. Barker)
National Center for Atmospheric Research, Boulder, CO USA GSI Data Assimilation Tutorial - June 28-30, 2010 Acknowledgments and References WRFDA Overview (WRF Tutorial Lectures, H. Huang and D. Barker)
A Spectral Approach to Linear Bayesian Updating
 A Spectral Approach to Linear Bayesian Updating Oliver Pajonk 1,2, Bojana V. Rosic 1, Alexander Litvinenko 1, and Hermann G. Matthies 1 1 Institute of Scientific Computing, TU Braunschweig, Germany 2 SPT
A Spectral Approach to Linear Bayesian Updating Oliver Pajonk 1,2, Bojana V. Rosic 1, Alexander Litvinenko 1, and Hermann G. Matthies 1 1 Institute of Scientific Computing, TU Braunschweig, Germany 2 SPT
PROBABILISTIC PREDICTIONS OF INFILTRATION INTO HETEROGENEOUS MEDIA WITH UNCERTAIN HYDRAULIC PARAMETERS
 International Journal for Uncertainty Quantification, 1(1):35 47, 211 PROBABILISTIC PREDICTIONS OF INFILTRATION INTO HETEROGENEOUS MEDIA WITH UNCERTAIN HYDRAULIC PARAMETERS Peng Wang & Daniel M. Tartakovsky
International Journal for Uncertainty Quantification, 1(1):35 47, 211 PROBABILISTIC PREDICTIONS OF INFILTRATION INTO HETEROGENEOUS MEDIA WITH UNCERTAIN HYDRAULIC PARAMETERS Peng Wang & Daniel M. Tartakovsky
Stochastic uncertainty analysis for solute transport in randomly heterogeneous media using a Karhunen-Loève-based moment equation approach
 WATER RESOURCES RESEARCH, VOL. 43,, doi:10.1029/2006wr005193, 2007 Stochastic uncertainty analysis for solute transport in randomly heterogeneous media using a Karhunen-Loève-based moment equation approach
WATER RESOURCES RESEARCH, VOL. 43,, doi:10.1029/2006wr005193, 2007 Stochastic uncertainty analysis for solute transport in randomly heterogeneous media using a Karhunen-Loève-based moment equation approach
Ensemble Kalman filter for automatic history matching of geologic facies
 Journal of Petroleum Science and Engineering 47 (2005) 147 161 www.elsevier.com/locate/petrol Ensemble Kalman filter for automatic history matching of geologic facies Ning LiuT, Dean S. Oliver School of
Journal of Petroleum Science and Engineering 47 (2005) 147 161 www.elsevier.com/locate/petrol Ensemble Kalman filter for automatic history matching of geologic facies Ning LiuT, Dean S. Oliver School of
Bayesian methodology to stochastic capture zone determination: Conditioning on transmissivity measurements
 WATER RESOURCES RESEARCH, VOL. 38, NO. 9, 1164, doi:10.1029/2001wr000950, 2002 Bayesian methodology to stochastic capture zone determination: Conditioning on transmissivity measurements L. Feyen, 1 P.
WATER RESOURCES RESEARCH, VOL. 38, NO. 9, 1164, doi:10.1029/2001wr000950, 2002 Bayesian methodology to stochastic capture zone determination: Conditioning on transmissivity measurements L. Feyen, 1 P.
Systematic strategies for real time filtering of turbulent signals in complex systems
 Systematic strategies for real time filtering of turbulent signals in complex systems Statistical inversion theory for Gaussian random variables The Kalman Filter for Vector Systems: Reduced Filters and
Systematic strategies for real time filtering of turbulent signals in complex systems Statistical inversion theory for Gaussian random variables The Kalman Filter for Vector Systems: Reduced Filters and
Prospects for river discharge and depth estimation through assimilation of swath altimetry into a raster-based hydraulics model
 Prospects for river discharge and depth estimation through assimilation of swath altimetry into a raster-based hydraulics model Kostas Andreadis 1, Elizabeth Clark 2, Dennis Lettenmaier 1, and Doug Alsdorf
Prospects for river discharge and depth estimation through assimilation of swath altimetry into a raster-based hydraulics model Kostas Andreadis 1, Elizabeth Clark 2, Dennis Lettenmaier 1, and Doug Alsdorf
Ensemble Kalman Filters for WRF-ARW. Chris Snyder MMM and IMAGe National Center for Atmospheric Research
 Ensemble Kalman Filters for WRF-ARW Chris Snyder MMM and IMAGe National Center for Atmospheric Research Preliminaries Notation: x = modelʼs state w.r.t. some discrete basis, e.g. grid-pt values y = Hx
Ensemble Kalman Filters for WRF-ARW Chris Snyder MMM and IMAGe National Center for Atmospheric Research Preliminaries Notation: x = modelʼs state w.r.t. some discrete basis, e.g. grid-pt values y = Hx
Superparameterization and Dynamic Stochastic Superresolution (DSS) for Filtering Sparse Geophysical Flows
 for Filtering Sparse Geophysical Flows") SP and DSS for Filtering Sparse Geophysical Flows Superparameterization and Dynamic Stochastic Superresolution (DSS) for Filtering Sparse Geophysical Flows Presented by Nan Chen, Michal Branicki and Chenyue
SP and DSS for Filtering Sparse Geophysical Flows Superparameterization and Dynamic Stochastic Superresolution (DSS) for Filtering Sparse Geophysical Flows Presented by Nan Chen, Michal Branicki and Chenyue
COLLOCATED CO-SIMULATION USING PROBABILITY AGGREGATION
 COLLOCATED CO-SIMULATION USING PROBABILITY AGGREGATION G. MARIETHOZ, PH. RENARD, R. FROIDEVAUX 2. CHYN, University of Neuchâtel, rue Emile Argand, CH - 2009 Neuchâtel, Switzerland 2 FSS Consultants, 9,
COLLOCATED CO-SIMULATION USING PROBABILITY AGGREGATION G. MARIETHOZ, PH. RENARD, R. FROIDEVAUX 2. CHYN, University of Neuchâtel, rue Emile Argand, CH - 2009 Neuchâtel, Switzerland 2 FSS Consultants, 9,
Ensemble Data Assimilation and Uncertainty Quantification
 Ensemble Data Assimilation and Uncertainty Quantification Jeff Anderson National Center for Atmospheric Research pg 1 What is Data Assimilation? Observations combined with a Model forecast + to produce
Ensemble Data Assimilation and Uncertainty Quantification Jeff Anderson National Center for Atmospheric Research pg 1 What is Data Assimilation? Observations combined with a Model forecast + to produce
An Efficient Ensemble Data Assimilation Approach To Deal With Range Limited Observation
 An Efficient Ensemble Data Assimilation Approach To Deal With Range Limited Observation A. Shah 1,2, M. E. Gharamti 1, L. Bertino 1 1 Nansen Environmental and Remote Sensing Center 2 University of Bergen
An Efficient Ensemble Data Assimilation Approach To Deal With Range Limited Observation A. Shah 1,2, M. E. Gharamti 1, L. Bertino 1 1 Nansen Environmental and Remote Sensing Center 2 University of Bergen
Gaussian Filtering Strategies for Nonlinear Systems
 Gaussian Filtering Strategies for Nonlinear Systems Canonical Nonlinear Filtering Problem ~u m+1 = ~ f (~u m )+~ m+1 ~v m+1 = ~g(~u m+1 )+~ o m+1 I ~ f and ~g are nonlinear & deterministic I Noise/Errors
Gaussian Filtering Strategies for Nonlinear Systems Canonical Nonlinear Filtering Problem ~u m+1 = ~ f (~u m )+~ m+1 ~v m+1 = ~g(~u m+1 )+~ o m+1 I ~ f and ~g are nonlinear & deterministic I Noise/Errors
PATTERN RECOGNITION AND MACHINE LEARNING CHAPTER 13: SEQUENTIAL DATA
 PATTERN RECOGNITION AND MACHINE LEARNING CHAPTER 13: SEQUENTIAL DATA Contents in latter part Linear Dynamical Systems What is different from HMM? Kalman filter Its strength and limitation Particle Filter
PATTERN RECOGNITION AND MACHINE LEARNING CHAPTER 13: SEQUENTIAL DATA Contents in latter part Linear Dynamical Systems What is different from HMM? Kalman filter Its strength and limitation Particle Filter
EnKF Review. P.L. Houtekamer 7th EnKF workshop Introduction to the EnKF. Challenges. The ultimate global EnKF algorithm
 Overview 1 2 3 Review of the Ensemble Kalman Filter for Atmospheric Data Assimilation 6th EnKF Purpose EnKF equations localization After the 6th EnKF (2014), I decided with Prof. Zhang to summarize progress
Overview 1 2 3 Review of the Ensemble Kalman Filter for Atmospheric Data Assimilation 6th EnKF Purpose EnKF equations localization After the 6th EnKF (2014), I decided with Prof. Zhang to summarize progress
SPE History Matching Using the Ensemble Kalman Filter on a North Sea Field Case
 SPE- 1243 History Matching Using the Ensemble Kalman Filter on a North Sea Field Case Vibeke Haugen, SPE, Statoil ASA, Lars-Jørgen Natvik, Statoil ASA, Geir Evensen, Hydro, Aina Berg, IRIS, Kristin Flornes,
SPE- 1243 History Matching Using the Ensemble Kalman Filter on a North Sea Field Case Vibeke Haugen, SPE, Statoil ASA, Lars-Jørgen Natvik, Statoil ASA, Geir Evensen, Hydro, Aina Berg, IRIS, Kristin Flornes,
Adaptive ensemble Kalman filtering of nonlinear systems
 Adaptive ensemble Kalman filtering of nonlinear systems Tyrus Berry George Mason University June 12, 213 : Problem Setup We consider a system of the form: x k+1 = f (x k ) + ω k+1 ω N (, Q) y k+1 = h(x
Adaptive ensemble Kalman filtering of nonlinear systems Tyrus Berry George Mason University June 12, 213 : Problem Setup We consider a system of the form: x k+1 = f (x k ) + ω k+1 ω N (, Q) y k+1 = h(x
Homogenization Theory
 Homogenization Theory Sabine Attinger Lecture: Homogenization Tuesday Wednesday Thursday August 15 August 16 August 17 Lecture Block 1 Motivation Basic Ideas Elliptic Equations Calculation of Effective
Homogenization Theory Sabine Attinger Lecture: Homogenization Tuesday Wednesday Thursday August 15 August 16 August 17 Lecture Block 1 Motivation Basic Ideas Elliptic Equations Calculation of Effective
Gaussian Process Approximations of Stochastic Differential Equations
 Gaussian Process Approximations of Stochastic Differential Equations Cédric Archambeau Dan Cawford Manfred Opper John Shawe-Taylor May, 2006 1 Introduction Some of the most complex models routinely run
Gaussian Process Approximations of Stochastic Differential Equations Cédric Archambeau Dan Cawford Manfred Opper John Shawe-Taylor May, 2006 1 Introduction Some of the most complex models routinely run
Localization in the ensemble Kalman Filter
 Department of Meteorology Localization in the ensemble Kalman Filter Ruth Elizabeth Petrie A dissertation submitted in partial fulfilment of the requirement for the degree of MSc. Atmosphere, Ocean and
Department of Meteorology Localization in the ensemble Kalman Filter Ruth Elizabeth Petrie A dissertation submitted in partial fulfilment of the requirement for the degree of MSc. Atmosphere, Ocean and
A State Space Model for Wind Forecast Correction
 A State Space Model for Wind Forecast Correction Valrie Monbe, Pierre Ailliot 2, and Anne Cuzol 1 1 Lab-STICC, Université Européenne de Bretagne, France (e-mail: valerie.monbet@univ-ubs.fr, anne.cuzol@univ-ubs.fr)
A State Space Model for Wind Forecast Correction Valrie Monbe, Pierre Ailliot 2, and Anne Cuzol 1 1 Lab-STICC, Université Européenne de Bretagne, France (e-mail: valerie.monbet@univ-ubs.fr, anne.cuzol@univ-ubs.fr)
Relative Merits of 4D-Var and Ensemble Kalman Filter
 Relative Merits of 4D-Var and Ensemble Kalman Filter Andrew Lorenc Met Office, Exeter International summer school on Atmospheric and Oceanic Sciences (ISSAOS) "Atmospheric Data Assimilation". August 29
Relative Merits of 4D-Var and Ensemble Kalman Filter Andrew Lorenc Met Office, Exeter International summer school on Atmospheric and Oceanic Sciences (ISSAOS) "Atmospheric Data Assimilation". August 29
A data-driven method for improving the correlation estimation in serial ensemble Kalman filter
 A data-driven method for improving the correlation estimation in serial ensemble Kalman filter Michèle De La Chevrotière, 1 John Harlim 2 1 Department of Mathematics, Penn State University, 2 Department
A data-driven method for improving the correlation estimation in serial ensemble Kalman filter Michèle De La Chevrotière, 1 John Harlim 2 1 Department of Mathematics, Penn State University, 2 Department
Organization. I MCMC discussion. I project talks. I Lecture.
 Organization I MCMC discussion I project talks. I Lecture. Content I Uncertainty Propagation Overview I Forward-Backward with an Ensemble I Model Reduction (Intro) Uncertainty Propagation in Causal Systems
Organization I MCMC discussion I project talks. I Lecture. Content I Uncertainty Propagation Overview I Forward-Backward with an Ensemble I Model Reduction (Intro) Uncertainty Propagation in Causal Systems
Probabilistic Collocation Method for Uncertainty Analysis of Soil Infiltration in Flood Modelling
 Probabilistic Collocation Method for Uncertainty Analysis of Soil Infiltration in Flood Modelling Y. Huang 1,2, and X.S. Qin 1,2* 1 School of Civil & Environmental Engineering, Nanyang Technological University,
Probabilistic Collocation Method for Uncertainty Analysis of Soil Infiltration in Flood Modelling Y. Huang 1,2, and X.S. Qin 1,2* 1 School of Civil & Environmental Engineering, Nanyang Technological University,
Bayesian Calibration of Simulators with Structured Discretization Uncertainty
 Bayesian Calibration of Simulators with Structured Discretization Uncertainty Oksana A. Chkrebtii Department of Statistics, The Ohio State University Joint work with Matthew T. Pratola (Statistics, The
Bayesian Calibration of Simulators with Structured Discretization Uncertainty Oksana A. Chkrebtii Department of Statistics, The Ohio State University Joint work with Matthew T. Pratola (Statistics, The
Particle Filters. Outline
 Particle Filters M. Sami Fadali Professor of EE University of Nevada Outline Monte Carlo integration. Particle filter. Importance sampling. Degeneracy Resampling Example. 1 2 Monte Carlo Integration Numerical
Particle Filters M. Sami Fadali Professor of EE University of Nevada Outline Monte Carlo integration. Particle filter. Importance sampling. Degeneracy Resampling Example. 1 2 Monte Carlo Integration Numerical
c 2004 Society for Industrial and Applied Mathematics
 SIAM J. SCI. COMPUT. Vol. 26, No. 2, pp. 558 577 c 2004 Society for Industrial and Applied Mathematics A COMPARATIVE STUDY ON UNCERTAINTY QUANTIFICATION FOR FLOW IN RANDOMLY HETEROGENEOUS MEDIA USING MONTE
SIAM J. SCI. COMPUT. Vol. 26, No. 2, pp. 558 577 c 2004 Society for Industrial and Applied Mathematics A COMPARATIVE STUDY ON UNCERTAINTY QUANTIFICATION FOR FLOW IN RANDOMLY HETEROGENEOUS MEDIA USING MONTE
Background. Developing a FracMan DFN Model. Fractures, FracMan and Fragmentation Applications of DFN Models to Block & Panel Caving
 Background Golder Associates are one of the pioneering groups in the use of the Discrete Fracture Network (DFN) approach. DFN models seek to describe the heterogeneous nature of fractured rock masses by
Background Golder Associates are one of the pioneering groups in the use of the Discrete Fracture Network (DFN) approach. DFN models seek to describe the heterogeneous nature of fractured rock masses by
Fundamentals of Data Assimila1on
 2015 GSI Community Tutorial NCAR Foothills Campus, Boulder, CO August 11-14, 2015 Fundamentals of Data Assimila1on Milija Zupanski Cooperative Institute for Research in the Atmosphere Colorado State University
2015 GSI Community Tutorial NCAR Foothills Campus, Boulder, CO August 11-14, 2015 Fundamentals of Data Assimila1on Milija Zupanski Cooperative Institute for Research in the Atmosphere Colorado State University
Uncertainty quantification and calibration of computer models. February 5th, 2014
 Uncertainty quantification and calibration of computer models February 5th, 2014 Physical model Physical model is defined by a set of differential equations. Now, they are usually described by computer
Uncertainty quantification and calibration of computer models February 5th, 2014 Physical model Physical model is defined by a set of differential equations. Now, they are usually described by computer
Stochastic Models, Estimation and Control Peter S. Maybeck Volumes 1, 2 & 3 Tables of Contents
 Navtech Part #s Volume 1 #1277 Volume 2 #1278 Volume 3 #1279 3 Volume Set #1280 Stochastic Models, Estimation and Control Peter S. Maybeck Volumes 1, 2 & 3 Tables of Contents Volume 1 Preface Contents
Navtech Part #s Volume 1 #1277 Volume 2 #1278 Volume 3 #1279 3 Volume Set #1280 Stochastic Models, Estimation and Control Peter S. Maybeck Volumes 1, 2 & 3 Tables of Contents Volume 1 Preface Contents
Winter 2019 Math 106 Topics in Applied Mathematics. Lecture 1: Introduction
 Winter 2019 Math 106 Topics in Applied Mathematics Data-driven Uncertainty Quantification Yoonsang Lee (yoonsang.lee@dartmouth.edu) Lecture 1: Introduction 19 Winter M106 Class: MWF 12:50-1:55 pm @ 200
Winter 2019 Math 106 Topics in Applied Mathematics Data-driven Uncertainty Quantification Yoonsang Lee (yoonsang.lee@dartmouth.edu) Lecture 1: Introduction 19 Winter M106 Class: MWF 12:50-1:55 pm @ 200
Enhanced Data-Driven Assessments of Hydraulic Capture Zones
 Enhanced Data-Driven Assessments of Hydraulic Capture Zones David E. Dougherty, Subterranean Research, Inc. David A. Wilson, EPA Region 5, GEOS Federal Remediation Technologies Roundtable Optimization
Enhanced Data-Driven Assessments of Hydraulic Capture Zones David E. Dougherty, Subterranean Research, Inc. David A. Wilson, EPA Region 5, GEOS Federal Remediation Technologies Roundtable Optimization
(Extended) Kalman Filter
 Kalman Filter") (Extended) Kalman Filter Brian Hunt 7 June 2013 Goals of Data Assimilation (DA) Estimate the state of a system based on both current and all past observations of the system, using a model for the system
(Extended) Kalman Filter Brian Hunt 7 June 2013 Goals of Data Assimilation (DA) Estimate the state of a system based on both current and all past observations of the system, using a model for the system