Smoothers: Types and Benchmarks
|
|
|
- Gary Miller
- 5 years ago
- Views:
Transcription

1 Smoothers: Types and Benchmarks Patrick N. Raanes Oxford University, NERSC 8th International EnKF Workshop May 27, 2013 Chris Farmer, Irene Moroz Laurent Bertino NERSC Geir Evensen
2 Abstract Talk builds on Smoothing problems in a Bayesian framework and their linear Gaussian solutions (Cosme et al., 2012) Aim: Introduce new organisation of smoothers Aim: Comparisons with less known RTS smoother
3 Outline Bayesian DA Classic Form Ensemble Formulations Benchmarking Appendix
4 Notation Kalman filter equations x t 1:t 1 = M t 1x t 1 1:t 1 P t 1:t 1 = M t 1P t 1 1:t 1 M t 1 + Qt K t = P t t 1 H C 1 x t 1:t = x t 1:t 1 + K td t P t 1:t = (I K th)p t t 1 where C 1 = ( ) HP t t 1 H 1 + R t and dt = (y t Hx t 1:t 1 ). PDF of state x conditioned on data y : p(x y) x 1:t = (x 1; x 2;... ; x t 1; x t) Estimate for x t given data y 1:t : x t 1:t
5 Notation Kalman filter equations x t 1:t 1 = M t 1x t 1 1:t 1 P t 1:t 1 = M t 1P t 1 1:t 1 M t 1 + Qt K t = P t t 1 H C 1 x t 1:t = x t 1:t 1 + K td t P t 1:t = (I K th)p t t 1 where C 1 = ( ) HP t t 1 H 1 + R t and dt = (y t Hx t 1:t 1 ). PDF of state x conditioned on data y : p(x y) x 1:t = (x 1; x 2;... ; x t 1; x t) Estimate for x t given data y 1:t : x t 1:t The n th ensemble member: All ensemble members: x n t 1:t E t 1:t Non-linear models denoted by curly symbols: H, M
6 Bayesian DA A useful generalisation Hidden Markov Chain Model M 0 M x 0 x 1 1 x M t 1 x t M T 1 x T H 1 H 2 H t H T y 1 y 2 y t y T Bayes Rule Marginalisation p(x y) = p(y x)p(x) p(y) p(x 1 ) = p(x 1, x 2 ) dx 2
7 Bayesian DA A useful generalisation 3 Methods Augmented Filter (AF) smoothers Backward-Forward, Rauch-Tung-Striebel (RTS) smoothers Two-Filter (2F) smoothers
8 Bayesian DA Augmented Filter (AF) smoothers Augment state vector: x t = ( ) xt x Σt, for some Σ t (0 : t 1)
9 Bayesian DA Augmented Filter (AF) smoothers Augment state vector: x t = Find filter solution ( ) xt x Σt, for some Σ t (0 : t 1) p(x t, x Σt y 1:t ) = p(y t x t ) p(x t x t 1 ) p(x t 1, x Σt 1 y 1:t 1 ) dx Σ c t \Σ c, t 1 provided Σ c t 1 Σc t, where Σ c t = {(0 : t 1)\Σ t }.
10 Bayesian DA AF special cases The Filter Observations Σ t =, i.e. (x t ; x Σt ) = x t States p(x t y 1:t ) = p(y t x t ) p(x t x t 1 ) p(x t 1 y 1:t 1 ) dx t 1
11 Bayesian DA AF special cases The Filter Observations Σ t =, i.e. (x t ; x Σt ) = x t States p(x t y 1:t ) = p(y t x t ) p(x t x t 1 ) p(x t 1 y 1:t 1 ) dx t 1
12 Bayesian DA AF special cases The Filter Σ t =, i.e. (x t ; x Σt ) = x t Observations States p(x t y 1:t ) = p(y t x t ) p(x t x t 1 ) p(x t 1 y 1:t 1 ) dx t 1
13 Bayesian DA AF special cases The Global, Sequential Smoother Observations Σ t = (0 : t 1), i.e. (x t ; x Σt ) = x 0:t States p(x 0:t y 1:t ) = p(y t x t )p(x t x t 1 ) p(x 0:t 1 y 1:t 1 )
14 Bayesian DA AF special cases The Global, Sequential Smoother Observations Σ t = (0 : t 1), i.e. (x t ; x Σt ) = x 0:t States p(x 0:t y 1:t ) = p(y t x t )p(x t x t 1 ) p(x 0:t 1 y 1:t 1 )
15 Bayesian DA AF special cases The Global, Sequential Smoother Observations Σ t = (0 : t 1), i.e. (x t ; x Σt ) = x 0:t States p(x 0:t y 1:t ) = p(y t x t )p(x t x t 1 ) p(x 0:t 1 y 1:t 1 )
16 Bayesian DA AF special cases The Fixed Lag Smoother Observations Σ t = (t L : t 1), i.e. (x t ; x Σt ) = x t L:t States p(x t L:t y 1:t ) = p(y t x t ) p(x t x t 1 ) p(x t 1 L:t 1 y 1:t 1 ) dx t 1
17 Bayesian DA AF special cases The Fixed Lag Smoother Σ t = (t L : t 1), i.e. (x t ; x Σt ) = x t L:t Observations States p(x t L:t y 1:t ) = p(y t x t ) p(x t x t 1 ) p(x t 1 L:t 1 y 1:t 1 ) dx t 1
18 Bayesian DA AF special cases The Fixed Lag Smoother Σ t = (t L : t 1), i.e. (x t ; x Σt ) = x t L:t Observations States p(x t L:t y 1:t ) = p(y t x t ) p(x t x t 1 ) p(x t 1 L:t 1 y 1:t 1 ) dx t 1
19 Bayesian DA AF special cases The Fixed, Lagging Point Smoother Σ t = t L, i.e. (x t ; x Σt ) = (x t ; x t L ) Observations States Does not satisfy the condition Σ c t 1 Σc t = no recursive relation available But the fixed-lag smoother should suffice
20 Bayesian DA AF special cases The Fixed, Lagging Point Smoother Σ t = t L, i.e. (x t ; x Σt ) = (x t ; x t L ) Observations States Does not satisfy the condition Σ c t 1 Σc t = no recursive relation available But the fixed-lag smoother should suffice
21 Bayesian DA AF special cases The Fixed, Lagging Point Smoother Σ t = t L, i.e. (x t ; x Σt ) = (x t ; x t L ) Observations States Does not satisfy the condition Σ c t 1 Σc t = no recursive relation available But the fixed-lag smoother should suffice
22 Bayesian DA RTS smoother Seek a recursive, marginal smoother for a fixed analysis window Observations p(x t y 1:T ) = p(x t x t+1, y 1:t ) p(x t+1 y 1:T ) dx t States First runs the filter; Then corrects backwards Recursive, but not with new data
23 Bayesian DA RTS smoother Seek a recursive, marginal smoother for a fixed analysis window p(x t y 1:T ) = p(x t x t+1, y 1:t ) p(x t+1 y 1:T ) dx t Observations States First runs the filter; Then corrects backwards Recursive, but not with new data
24 Bayesian DA RTS smoother Seek a recursive, marginal smoother for a fixed analysis window p(x t y 1:T ) = p(x t x t+1, y 1:t ) p(x t+1 y 1:T ) dx t Observations States First runs the filter; Then corrects backwards Recursive, but not with new data
25 Bayesian DA RTS smoother Seek a recursive, marginal smoother for a fixed analysis window p(x t y 1:T ) = p(x t x t+1, y 1:t ) p(x t+1 y 1:T ) dx t Observations States First runs the filter; Then corrects backwards Recursive, but not with new data
26 Bayesian DA Two-Filter (2F) smoother Seek a smoother that directly utilises the filter solution p(x t y 1:T ) = p(x t y 1:t ) p(y t+1:t x t ) Observations States Recursive, but not with new data Involves a backwards likelihood/information filter = Requires adjoint model Will not be discussed further
27 Bayesian DA Two-Filter (2F) smoother Seek a smoother that directly utilises the filter solution p(x t y 1:T ) = p(x t y 1:t ) p(y t+1:t x t ) Observations States Recursive, but not with new data Involves a backwards likelihood/information filter = Requires adjoint model Will not be discussed further
28 Bayesian DA Classic Forms Ensemble Formulations Benchmarking
29 Classic Form Derivable from the Bayesian formulations assuming Gaussian noise input and linear models Can simply insert augmented matrices into the Kalman filter equations
30 Classic Form Augmented Filter Smoother Augmented system matrices: Observations Fixed Point/Interval H t = (H t 0 0) M t 0 0 M t = 0. I 0 Fixed-Lag M t = M t 0 0 I 0. 0
31 Classic Form Augmented Filter Smoother In either case, the other block matrices are Q t 0 0 Q t = 0. 0, Pt = 0 P t P Σt,t P t,σt P Σt, which reduces the Kalman gain to K t+1 = K t+1 K Σt+1 = P t+1 1:t P Σt+1,t+1 1:t H t+1 C 1
32 Classic Form Augmented Filter Smoother Thus, in addition to the usual filter updates, we get x Σt 1:t = x Σt 1:t 1 + K Σt d t P t,σt 1:t = (I K t H)P t,σt 1:t 1 P Σt 1:t = P Σt 1:t 1 K Σt HP t,σt 1:t 1
33 Classic Form RTS Smoother Derivable using the usual Linear, Gaussian assumptions The recursive, retrospective corrections become J t = P t 1:t M t P 1 t+1 1:t x t 1:T = x t 1:t + J t ( x t+1 1:T x t+1 1:t ) P t 1:T = P t 1:t J t ( P t+1 1:T P t+1 1:t ) J t
34 Bayesian DA Classic Forms Ensemble Formulations Benchmarking
35 Ensemble formulation Augmented Filter Smoother Classic form ( ) 1 K Σt = P Σt,t 1:t 1 H HP t 1:t 1 H + R x Σt 1:t = x Σt 1:t 1 + K Σt d t
36 Ensemble formulation Augmented Filter Smoother Classic form ( ) 1 K Σt = P Σt,t 1:t 1 H HP t 1:t 1 H + R x Σt 1:t = x Σt 1:t 1 + K Σt d t Ensemble formulation = { EnKF (Evensen, 1994) EnKS (Evensen and Van Leeuwen, 2000)
37 Ensemble formulation Augmented Filter Smoother Classic form ( ) 1 K Σt = P Σt,t 1:t 1 H HP t 1:t 1 H + R x Σt 1:t = x Σt 1:t 1 + K Σt d t Ensemble formulation = { EnKF (Evensen, 1994) EnKS (Evensen and Van Leeuwen, 2000) K Σt = A Σt 1:t 1 S t (S ts t + R) 1 x n Σ t 1:t = xn Σ t 1:t 1 + K Σ t d n t, where A t 1:t = E t 1:t [ I 1 N ½½ ] and S t = H ( E t 1:t 1 ) [ I 1 N ½½ ].
38 Ensemble formulation Augmented Filter Smoother Possibility: Save up multiple updates before analysing. = EnS (Van Leeuwen and Evensen, 1996) May save significant time because max n t T n t < t max T n n t, where Tt n is the time required to propagate ensemble member n from one observation point to another. Possibility: Process observations sequentially. = EnSS (Cosme et al., 2012)
39 Ensemble formulation RTS Smoother Classic form Ensemble formulation J t = P t 1:t M t P 1 t+1 1:t x t 1:T = x t 1:t + J t ( x t+1 1:T x t+1 1:t ) A t+1 t = UΣV J t = A t 1:t V Σ 1 U x n t 1:T = xn t 1:t + J t ( ) x n t+1 1:T xn t+1 1:t = EnRTS (Lermusiaux and Robinson, 1999)
40 Bayesian DA Classic Forms Ensemble Formulations Benchmarking
41 Classic Form Marginal and joint smoothers Joint and marginal estimates may differ But the marginal and joint means are always equal Besides, the marginal pdfs of a Gaussian RV are just the individual components of the joint pdf = Classic smoothers, whether marginal or not, yield the same estimate if the system is linear and Gaussian.
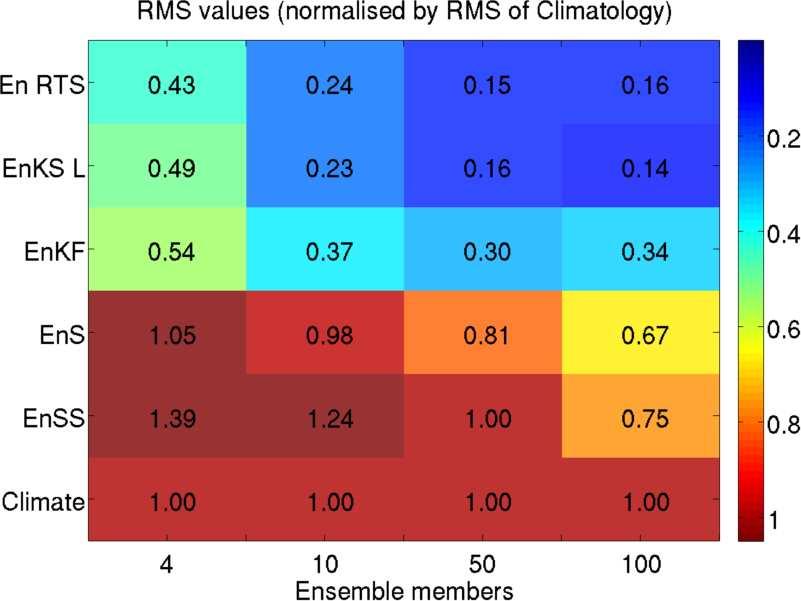
42 Benchmarking RMS RMS: 1 Tt=1 T x t x t 2 Normalised by the RMS of climatology.
 t=0 = (1.508870, 1.531271, 25.460910), Q t = diag([2, 12.13, 12.31]). Direct observations of all 3 components and R t = 2I. T = 10.")
43 Benchmarking Lorenz 63 A convenient, chaotic, toy model dx = σ(y x), dt dy = x(ρ z) y, dt dz = xy βz. dt with σ = 10, β = 8/3, ρ = 28, initial cond. (x, y, z) t=0 = ( , , ), Q t = diag([2, 12.13, 12.31]). Direct observations of all 3 components and R t = 2I. T = 10. t between observations = 0.25.
44 Benchmarking Lorenz 63
45 Benchmarking 1D Linear Advection A linear, high-dimensional toy model u t + c u x = 0 with c = x = t = 1, a periodic waveform with decorrelation length 20, a periodic domain with 300 nodes, and no forward model noise. Direct observations 60 nodes apart, assimilated every 10 time steps, with R t = 0.01I. T = 305.

46 Benchmarking 1D Linear Advection
47 Benchmarking Method performance EnS superior on LA model EnKS and RTS superior to EnS(S) on Lorenz 63 EnKS and RTS perform similarly on both models EnS superior EnS-Sequential Difference SQRT/Pert comparatively insignificant
48 Benchmarking Costs Asymptotic numerical flop costs. Not including application of M and H to ensemble Assumes N n x, n y. (N: number of ensemble members) Method Flops EnKF T N 2 (n x + n y ) 0 EnKS T N 2 (n x + n y ) T 2 N 2 n x EnKS-Lag T N 2 (n x + n y ) + LT N 2 n x EnS 0 + T N 2 n x EnRTS T N 2 (n x + n y ) + T N 2 n x
49 Future work More models More parameter test regimes More assessment scores than RMS More careful cost analysis More DA methods
50 References Cosme, E., J. Verron, P. Brasseur, J. Blum, and D. Auroux, 2012: Smoothing problems in a bayesian framework and their linear gaussian solutions. Monthly Weather Review, 140, Evensen, G., 1994: Sequential data assimilation with a nonlinear quasi-geostrophic model using monte carlo methods to forecast error statistics. Journal of Geophysical Research, 99, : The ensemble kalman filter for combined state and parameter estimation. Control Systems, IEEE, 29, Evensen, G. and P. Van Leeuwen, 2000: An ensemble kalman smoother for nonlinear dynamics. Monthly Weather Review, 128, Jazwinski, A., 1970: Stochastic processes and filtering theory, volume 63. Academic press. Lermusiaux, P. F. and A. Robinson, 1999: Data assimilation via error subspace statistical estimation. part i: Theory and schemes. Monthly Weather Review, 127, Skjervheim, J. and G. Evensen, 2011: An ensemble smoother for assisted history matching. SPE Reservoir Simulation Symposium. Van Leeuwen, P. J. and G. Evensen, 1996: Data assimilation and inverse methods in terms of a probabilistic formulation. Monthly Weather Review-USA, 124,
51 Bayesian DA AF special cases The Fixed Point Smoother Σ t = k, i.e. (x t ; x Σt ) = (x t ; x k ) Observations States p(x t, x k y 1:t ) = p(y t x t ) p(x t x t 1 ) p(x t 1, x k y 1:t 1 ) dx t 1
52 Bayesian DA AF special cases The Fixed Point Smoother Σ t = k, i.e. (x t ; x Σt ) = (x t ; x k ) Observations States p(x t, x k y 1:t ) = p(y t x t ) p(x t x t 1 ) p(x t 1, x k y 1:t 1 ) dx t 1
Lecture 2: From Linear Regression to Kalman Filter and Beyond
 Lecture 2: From Linear Regression to Kalman Filter and Beyond January 18, 2017 Contents 1 Batch and Recursive Estimation 2 Towards Bayesian Filtering 3 Kalman Filter and Bayesian Filtering and Smoothing
Lecture 2: From Linear Regression to Kalman Filter and Beyond January 18, 2017 Contents 1 Batch and Recursive Estimation 2 Towards Bayesian Filtering 3 Kalman Filter and Bayesian Filtering and Smoothing
The Ensemble Kalman Filter:
 p.1 The Ensemble Kalman Filter: Theoretical formulation and practical implementation Geir Evensen Norsk Hydro Research Centre, Bergen, Norway Based on Evensen 23, Ocean Dynamics, Vol 53, No 4 p.2 The Ensemble
p.1 The Ensemble Kalman Filter: Theoretical formulation and practical implementation Geir Evensen Norsk Hydro Research Centre, Bergen, Norway Based on Evensen 23, Ocean Dynamics, Vol 53, No 4 p.2 The Ensemble
Organization. I MCMC discussion. I project talks. I Lecture.
 Organization I MCMC discussion I project talks. I Lecture. Content I Uncertainty Propagation Overview I Forward-Backward with an Ensemble I Model Reduction (Intro) Uncertainty Propagation in Causal Systems
Organization I MCMC discussion I project talks. I Lecture. Content I Uncertainty Propagation Overview I Forward-Backward with an Ensemble I Model Reduction (Intro) Uncertainty Propagation in Causal Systems
The Kalman Filter ImPr Talk
 The Kalman Filter ImPr Talk Ged Ridgway Centre for Medical Image Computing November, 2006 Outline What is the Kalman Filter? State Space Models Kalman Filter Overview Bayesian Updating of Estimates Kalman
The Kalman Filter ImPr Talk Ged Ridgway Centre for Medical Image Computing November, 2006 Outline What is the Kalman Filter? State Space Models Kalman Filter Overview Bayesian Updating of Estimates Kalman
Lecture 7: Optimal Smoothing
 Department of Biomedical Engineering and Computational Science Aalto University March 17, 2011 Contents 1 What is Optimal Smoothing? 2 Bayesian Optimal Smoothing Equations 3 Rauch-Tung-Striebel Smoother
Department of Biomedical Engineering and Computational Science Aalto University March 17, 2011 Contents 1 What is Optimal Smoothing? 2 Bayesian Optimal Smoothing Equations 3 Rauch-Tung-Striebel Smoother
Lecture 6: Bayesian Inference in SDE Models
 Lecture 6: Bayesian Inference in SDE Models Bayesian Filtering and Smoothing Point of View Simo Särkkä Aalto University Simo Särkkä (Aalto) Lecture 6: Bayesian Inference in SDEs 1 / 45 Contents 1 SDEs
Lecture 6: Bayesian Inference in SDE Models Bayesian Filtering and Smoothing Point of View Simo Särkkä Aalto University Simo Särkkä (Aalto) Lecture 6: Bayesian Inference in SDEs 1 / 45 Contents 1 SDEs
Short tutorial on data assimilation
 Mitglied der Helmholtz-Gemeinschaft Short tutorial on data assimilation 23 June 2015 Wolfgang Kurtz & Harrie-Jan Hendricks Franssen Institute of Bio- and Geosciences IBG-3 (Agrosphere), Forschungszentrum
Mitglied der Helmholtz-Gemeinschaft Short tutorial on data assimilation 23 June 2015 Wolfgang Kurtz & Harrie-Jan Hendricks Franssen Institute of Bio- and Geosciences IBG-3 (Agrosphere), Forschungszentrum
Ensemble Kalman Filter
 Ensemble Kalman Filter Geir Evensen and Laurent Bertino Hydro Research Centre, Bergen, Norway, Nansen Environmental and Remote Sensing Center, Bergen, Norway The Ensemble Kalman Filter (EnKF) Represents
Ensemble Kalman Filter Geir Evensen and Laurent Bertino Hydro Research Centre, Bergen, Norway, Nansen Environmental and Remote Sensing Center, Bergen, Norway The Ensemble Kalman Filter (EnKF) Represents
Asynchronous data assimilation
 Ensemble Kalman Filter, lecture 2 Asynchronous data assimilation Pavel Sakov Nansen Environmental and Remote Sensing Center, Norway This talk has been prepared in the course of evita-enkf project funded
Ensemble Kalman Filter, lecture 2 Asynchronous data assimilation Pavel Sakov Nansen Environmental and Remote Sensing Center, Norway This talk has been prepared in the course of evita-enkf project funded
Convergence of the Ensemble Kalman Filter in Hilbert Space
 Convergence of the Ensemble Kalman Filter in Hilbert Space Jan Mandel Center for Computational Mathematics Department of Mathematical and Statistical Sciences University of Colorado Denver Parts based
Convergence of the Ensemble Kalman Filter in Hilbert Space Jan Mandel Center for Computational Mathematics Department of Mathematical and Statistical Sciences University of Colorado Denver Parts based
Lagrangian Data Assimilation and Its Application to Geophysical Fluid Flows
 Lagrangian Data Assimilation and Its Application to Geophysical Fluid Flows Laura Slivinski June, 3 Laura Slivinski (Brown University) Lagrangian Data Assimilation June, 3 / 3 Data Assimilation Setup:
Lagrangian Data Assimilation and Its Application to Geophysical Fluid Flows Laura Slivinski June, 3 Laura Slivinski (Brown University) Lagrangian Data Assimilation June, 3 / 3 Data Assimilation Setup:
6 Sequential Data Assimilation for Nonlinear Dynamics: The Ensemble Kalman Filter
 6 Sequential Data Assimilation for Nonlinear Dynamics: The Ensemble Kalman Filter GEIR EVENSEN Nansen Environmental and Remote Sensing Center, Bergen, Norway 6.1 Introduction Sequential data assimilation
6 Sequential Data Assimilation for Nonlinear Dynamics: The Ensemble Kalman Filter GEIR EVENSEN Nansen Environmental and Remote Sensing Center, Bergen, Norway 6.1 Introduction Sequential data assimilation
Lecture 2: From Linear Regression to Kalman Filter and Beyond
 Lecture 2: From Linear Regression to Kalman Filter and Beyond Department of Biomedical Engineering and Computational Science Aalto University January 26, 2012 Contents 1 Batch and Recursive Estimation
Lecture 2: From Linear Regression to Kalman Filter and Beyond Department of Biomedical Engineering and Computational Science Aalto University January 26, 2012 Contents 1 Batch and Recursive Estimation
Relationship between Singular Vectors, Bred Vectors, 4D-Var and EnKF
 Relationship between Singular Vectors, Bred Vectors, 4D-Var and EnKF Eugenia Kalnay and Shu-Chih Yang with Alberto Carrasi, Matteo Corazza and Takemasa Miyoshi 4th EnKF Workshop, April 2010 Relationship
Relationship between Singular Vectors, Bred Vectors, 4D-Var and EnKF Eugenia Kalnay and Shu-Chih Yang with Alberto Carrasi, Matteo Corazza and Takemasa Miyoshi 4th EnKF Workshop, April 2010 Relationship
The Ensemble Kalman Filter:
 p.1 The Ensemble Kalman Filter: Theoretical formulation and practical implementation Geir Evensen Norsk Hydro Research Centre, Bergen, Norway Based on Evensen, Ocean Dynamics, Vol 5, No p. The Ensemble
p.1 The Ensemble Kalman Filter: Theoretical formulation and practical implementation Geir Evensen Norsk Hydro Research Centre, Bergen, Norway Based on Evensen, Ocean Dynamics, Vol 5, No p. The Ensemble
Towards a Bayesian model for Cyber Security
 Towards a Bayesian model for Cyber Security Mark Briers (mbriers@turing.ac.uk) Joint work with Henry Clausen and Prof. Niall Adams (Imperial College London) 27 September 2017 The Alan Turing Institute
Towards a Bayesian model for Cyber Security Mark Briers (mbriers@turing.ac.uk) Joint work with Henry Clausen and Prof. Niall Adams (Imperial College London) 27 September 2017 The Alan Turing Institute
Analysis Scheme in the Ensemble Kalman Filter
 JUNE 1998 BURGERS ET AL. 1719 Analysis Scheme in the Ensemble Kalman Filter GERRIT BURGERS Royal Netherlands Meteorological Institute, De Bilt, the Netherlands PETER JAN VAN LEEUWEN Institute or Marine
JUNE 1998 BURGERS ET AL. 1719 Analysis Scheme in the Ensemble Kalman Filter GERRIT BURGERS Royal Netherlands Meteorological Institute, De Bilt, the Netherlands PETER JAN VAN LEEUWEN Institute or Marine
Lagrangian Data Assimilation and Manifold Detection for a Point-Vortex Model. David Darmon, AMSC Kayo Ide, AOSC, IPST, CSCAMM, ESSIC
 Lagrangian Data Assimilation and Manifold Detection for a Point-Vortex Model David Darmon, AMSC Kayo Ide, AOSC, IPST, CSCAMM, ESSIC Background Data Assimilation Iterative process Forecast Analysis Background
Lagrangian Data Assimilation and Manifold Detection for a Point-Vortex Model David Darmon, AMSC Kayo Ide, AOSC, IPST, CSCAMM, ESSIC Background Data Assimilation Iterative process Forecast Analysis Background
An Ensemble Kalman Smoother for Nonlinear Dynamics
 1852 MONTHLY WEATHER REVIEW VOLUME 128 An Ensemble Kalman Smoother or Nonlinear Dynamics GEIR EVENSEN Nansen Environmental and Remote Sensing Center, Bergen, Norway PETER JAN VAN LEEUWEN Institute or Marine
1852 MONTHLY WEATHER REVIEW VOLUME 128 An Ensemble Kalman Smoother or Nonlinear Dynamics GEIR EVENSEN Nansen Environmental and Remote Sensing Center, Bergen, Norway PETER JAN VAN LEEUWEN Institute or Marine
A Note on the Particle Filter with Posterior Gaussian Resampling
 Tellus (6), 8A, 46 46 Copyright C Blackwell Munksgaard, 6 Printed in Singapore. All rights reserved TELLUS A Note on the Particle Filter with Posterior Gaussian Resampling By X. XIONG 1,I.M.NAVON 1,2 and
Tellus (6), 8A, 46 46 Copyright C Blackwell Munksgaard, 6 Printed in Singapore. All rights reserved TELLUS A Note on the Particle Filter with Posterior Gaussian Resampling By X. XIONG 1,I.M.NAVON 1,2 and
Data Assimilation in the Geosciences
 Data Assimilation in the Geosciences An overview on methods, issues and perspectives arxiv:1709.02798v3 [physics.ao-ph] 8 Jun 2018 Alberto Carrassi, Marc Bocquet, Laurent Bertino and Geir Evensen Article
Data Assimilation in the Geosciences An overview on methods, issues and perspectives arxiv:1709.02798v3 [physics.ao-ph] 8 Jun 2018 Alberto Carrassi, Marc Bocquet, Laurent Bertino and Geir Evensen Article
Estimating model evidence using data assimilation
 Estimating model evidence using data assimilation Application to the attribution of climate-related events Marc Bocquet 1, Alberto Carrassi 2, Alexis Hannart 3 & Michael Ghil 4,5 and the DADA Team (1 CEREA,
Estimating model evidence using data assimilation Application to the attribution of climate-related events Marc Bocquet 1, Alberto Carrassi 2, Alexis Hannart 3 & Michael Ghil 4,5 and the DADA Team (1 CEREA,
An Efficient Ensemble Data Assimilation Approach To Deal With Range Limited Observation
 An Efficient Ensemble Data Assimilation Approach To Deal With Range Limited Observation A. Shah 1,2, M. E. Gharamti 1, L. Bertino 1 1 Nansen Environmental and Remote Sensing Center 2 University of Bergen
An Efficient Ensemble Data Assimilation Approach To Deal With Range Limited Observation A. Shah 1,2, M. E. Gharamti 1, L. Bertino 1 1 Nansen Environmental and Remote Sensing Center 2 University of Bergen
Introduction to Particle Filters for Data Assimilation
 Introduction to Particle Filters for Data Assimilation Mike Dowd Dept of Mathematics & Statistics (and Dept of Oceanography Dalhousie University, Halifax, Canada STATMOS Summer School in Data Assimila5on,
Introduction to Particle Filters for Data Assimilation Mike Dowd Dept of Mathematics & Statistics (and Dept of Oceanography Dalhousie University, Halifax, Canada STATMOS Summer School in Data Assimila5on,
Graphical Models for Statistical Inference and Data Assimilation
 Graphical Models for Statistical Inference and Data Assimilation Alexander T. Ihler a Sergey Kirshner b Michael Ghil c,d Andrew W. Robertson e Padhraic Smyth a a Donald Bren School of Information and Computer
Graphical Models for Statistical Inference and Data Assimilation Alexander T. Ihler a Sergey Kirshner b Michael Ghil c,d Andrew W. Robertson e Padhraic Smyth a a Donald Bren School of Information and Computer
Data assimilation in the geosciences An overview
 Data assimilation in the geosciences An overview Alberto Carrassi 1, Olivier Talagrand 2, Marc Bocquet 3 (1) NERSC, Bergen, Norway (2) LMD, École Normale Supérieure, IPSL, France (3) CEREA, joint lab École
Data assimilation in the geosciences An overview Alberto Carrassi 1, Olivier Talagrand 2, Marc Bocquet 3 (1) NERSC, Bergen, Norway (2) LMD, École Normale Supérieure, IPSL, France (3) CEREA, joint lab École
Fundamentals of Data Assimilation
 National Center for Atmospheric Research, Boulder, CO USA GSI Data Assimilation Tutorial - June 28-30, 2010 Acknowledgments and References WRFDA Overview (WRF Tutorial Lectures, H. Huang and D. Barker)
National Center for Atmospheric Research, Boulder, CO USA GSI Data Assimilation Tutorial - June 28-30, 2010 Acknowledgments and References WRFDA Overview (WRF Tutorial Lectures, H. Huang and D. Barker)
Graphical Models for Statistical Inference and Data Assimilation
 Graphical Models for Statistical Inference and Data Assimilation Alexander T. Ihler a Sergey Kirshner a Michael Ghil b,c Andrew W. Robertson d Padhraic Smyth a a Donald Bren School of Information and Computer
Graphical Models for Statistical Inference and Data Assimilation Alexander T. Ihler a Sergey Kirshner a Michael Ghil b,c Andrew W. Robertson d Padhraic Smyth a a Donald Bren School of Information and Computer
A Spectral Approach to Linear Bayesian Updating
 A Spectral Approach to Linear Bayesian Updating Oliver Pajonk 1,2, Bojana V. Rosic 1, Alexander Litvinenko 1, and Hermann G. Matthies 1 1 Institute of Scientific Computing, TU Braunschweig, Germany 2 SPT
A Spectral Approach to Linear Bayesian Updating Oliver Pajonk 1,2, Bojana V. Rosic 1, Alexander Litvinenko 1, and Hermann G. Matthies 1 1 Institute of Scientific Computing, TU Braunschweig, Germany 2 SPT
Particle Filtering Approaches for Dynamic Stochastic Optimization
 Particle Filtering Approaches for Dynamic Stochastic Optimization John R. Birge The University of Chicago Booth School of Business Joint work with Nicholas Polson, Chicago Booth. JRBirge I-Sim Workshop,
Particle Filtering Approaches for Dynamic Stochastic Optimization John R. Birge The University of Chicago Booth School of Business Joint work with Nicholas Polson, Chicago Booth. JRBirge I-Sim Workshop,
4. DATA ASSIMILATION FUNDAMENTALS
 4. DATA ASSIMILATION FUNDAMENTALS... [the atmosphere] "is a chaotic system in which errors introduced into the system can grow with time... As a consequence, data assimilation is a struggle between chaotic
4. DATA ASSIMILATION FUNDAMENTALS... [the atmosphere] "is a chaotic system in which errors introduced into the system can grow with time... As a consequence, data assimilation is a struggle between chaotic
Methods of Data Assimilation and Comparisons for Lagrangian Data
 Methods of Data Assimilation and Comparisons for Lagrangian Data Chris Jones, Warwick and UNC-CH Kayo Ide, UCLA Andrew Stuart, Jochen Voss, Warwick Guillaume Vernieres, UNC-CH Amarjit Budiraja, UNC-CH
Methods of Data Assimilation and Comparisons for Lagrangian Data Chris Jones, Warwick and UNC-CH Kayo Ide, UCLA Andrew Stuart, Jochen Voss, Warwick Guillaume Vernieres, UNC-CH Amarjit Budiraja, UNC-CH
Probabilistic Graphical Models
 Probabilistic Graphical Models Brown University CSCI 2950-P, Spring 2013 Prof. Erik Sudderth Lecture 12: Gaussian Belief Propagation, State Space Models and Kalman Filters Guest Kalman Filter Lecture by
Probabilistic Graphical Models Brown University CSCI 2950-P, Spring 2013 Prof. Erik Sudderth Lecture 12: Gaussian Belief Propagation, State Space Models and Kalman Filters Guest Kalman Filter Lecture by
Bayesian Statistics and Data Assimilation. Jonathan Stroud. Department of Statistics The George Washington University
 Bayesian Statistics and Data Assimilation Jonathan Stroud Department of Statistics The George Washington University 1 Outline Motivation Bayesian Statistics Parameter Estimation in Data Assimilation Combined
Bayesian Statistics and Data Assimilation Jonathan Stroud Department of Statistics The George Washington University 1 Outline Motivation Bayesian Statistics Parameter Estimation in Data Assimilation Combined
EnKF-based particle filters
 EnKF-based particle filters Jana de Wiljes, Sebastian Reich, Wilhelm Stannat, Walter Acevedo June 20, 2017 Filtering Problem Signal dx t = f (X t )dt + 2CdW t Observations dy t = h(x t )dt + R 1/2 dv t.
EnKF-based particle filters Jana de Wiljes, Sebastian Reich, Wilhelm Stannat, Walter Acevedo June 20, 2017 Filtering Problem Signal dx t = f (X t )dt + 2CdW t Observations dy t = h(x t )dt + R 1/2 dv t.
Relationship between Singular Vectors, Bred Vectors, 4D-Var and EnKF
 Relationship between Singular Vectors, Bred Vectors, 4D-Var and EnKF Eugenia Kalnay and Shu-Chih Yang with Alberto Carrasi, Matteo Corazza and Takemasa Miyoshi ECODYC10, Dresden 28 January 2010 Relationship
Relationship between Singular Vectors, Bred Vectors, 4D-Var and EnKF Eugenia Kalnay and Shu-Chih Yang with Alberto Carrasi, Matteo Corazza and Takemasa Miyoshi ECODYC10, Dresden 28 January 2010 Relationship
Graphical models for statistical inference and data assimilation
 Physica D ( ) www.elsevier.com/locate/physd Graphical models for statistical inference and data assimilation Alexander T. Ihler a,, Sergey Kirshner b, Michael Ghil c,d, Andrew W. Robertson e, Padhraic
Physica D ( ) www.elsevier.com/locate/physd Graphical models for statistical inference and data assimilation Alexander T. Ihler a,, Sergey Kirshner b, Michael Ghil c,d, Andrew W. Robertson e, Padhraic
Relative Merits of 4D-Var and Ensemble Kalman Filter
 Relative Merits of 4D-Var and Ensemble Kalman Filter Andrew Lorenc Met Office, Exeter International summer school on Atmospheric and Oceanic Sciences (ISSAOS) "Atmospheric Data Assimilation". August 29
Relative Merits of 4D-Var and Ensemble Kalman Filter Andrew Lorenc Met Office, Exeter International summer school on Atmospheric and Oceanic Sciences (ISSAOS) "Atmospheric Data Assimilation". August 29
Markov Chain Monte Carlo Methods for Stochastic Optimization
 Markov Chain Monte Carlo Methods for Stochastic Optimization John R. Birge The University of Chicago Booth School of Business Joint work with Nicholas Polson, Chicago Booth. JRBirge U of Toronto, MIE,
Markov Chain Monte Carlo Methods for Stochastic Optimization John R. Birge The University of Chicago Booth School of Business Joint work with Nicholas Polson, Chicago Booth. JRBirge U of Toronto, MIE,
Gaussian Process Approximations of Stochastic Differential Equations
 Gaussian Process Approximations of Stochastic Differential Equations Cédric Archambeau Dan Cawford Manfred Opper John Shawe-Taylor May, 2006 1 Introduction Some of the most complex models routinely run
Gaussian Process Approximations of Stochastic Differential Equations Cédric Archambeau Dan Cawford Manfred Opper John Shawe-Taylor May, 2006 1 Introduction Some of the most complex models routinely run
On the convergence of (ensemble) Kalman filters and smoothers onto the unstable subspace
 Kalman filters and smoothers onto the unstable subspace") On the convergence of (ensemble) Kalman filters and smoothers onto the unstable subspace Marc Bocquet CEREA, joint lab École des Ponts ParisTech and EdF R&D, Université Paris-Est, France Institut Pierre-Simon
On the convergence of (ensemble) Kalman filters and smoothers onto the unstable subspace Marc Bocquet CEREA, joint lab École des Ponts ParisTech and EdF R&D, Université Paris-Est, France Institut Pierre-Simon
A Gaussian Mixture Model Smoother for Continuous Nonlinear Stochastic Dynamical Systems: Applications
 JULY 2017 L O L L A A N D L E R M U S I A U X 2763 A Gaussian Mixture Model Smoother for Continuous Nonlinear Stochastic Dynamical Systems: Applications TAPOVAN LOLLA AND PIERRE F. J. LERMUSIAUX Department
JULY 2017 L O L L A A N D L E R M U S I A U X 2763 A Gaussian Mixture Model Smoother for Continuous Nonlinear Stochastic Dynamical Systems: Applications TAPOVAN LOLLA AND PIERRE F. J. LERMUSIAUX Department
Ergodicity in data assimilation methods
 Ergodicity in data assimilation methods David Kelly Andy Majda Xin Tong Courant Institute New York University New York NY www.dtbkelly.com April 15, 2016 ETH Zurich David Kelly (CIMS) Data assimilation
Ergodicity in data assimilation methods David Kelly Andy Majda Xin Tong Courant Institute New York University New York NY www.dtbkelly.com April 15, 2016 ETH Zurich David Kelly (CIMS) Data assimilation
The Kalman Filter. Data Assimilation & Inverse Problems from Weather Forecasting to Neuroscience. Sarah Dance
 The Kalman Filter Data Assimilation & Inverse Problems from Weather Forecasting to Neuroscience Sarah Dance School of Mathematical and Physical Sciences, University of Reading s.l.dance@reading.ac.uk July
The Kalman Filter Data Assimilation & Inverse Problems from Weather Forecasting to Neuroscience Sarah Dance School of Mathematical and Physical Sciences, University of Reading s.l.dance@reading.ac.uk July
A nested sampling particle filter for nonlinear data assimilation
 Quarterly Journal of the Royal Meteorological Society Q. J. R. Meteorol. Soc. : 14, July 2 A DOI:.2/qj.224 A nested sampling particle filter for nonlinear data assimilation Ahmed H. Elsheikh a,b *, Ibrahim
Quarterly Journal of the Royal Meteorological Society Q. J. R. Meteorol. Soc. : 14, July 2 A DOI:.2/qj.224 A nested sampling particle filter for nonlinear data assimilation Ahmed H. Elsheikh a,b *, Ibrahim
UNDERSTANDING DATA ASSIMILATION APPLICATIONS TO HIGH-LATITUDE IONOSPHERIC ELECTRODYNAMICS
 Monday, June 27, 2011 CEDAR-GEM joint workshop: DA tutorial 1 UNDERSTANDING DATA ASSIMILATION APPLICATIONS TO HIGH-LATITUDE IONOSPHERIC ELECTRODYNAMICS Tomoko Matsuo University of Colorado, Boulder Space
Monday, June 27, 2011 CEDAR-GEM joint workshop: DA tutorial 1 UNDERSTANDING DATA ASSIMILATION APPLICATIONS TO HIGH-LATITUDE IONOSPHERIC ELECTRODYNAMICS Tomoko Matsuo University of Colorado, Boulder Space
The Ensemble Kalman Filter: Theoretical Formulation and Practical Implementation
 The Ensemble Kalman Filter: Theoretical Formulation and Practical Implementation Geir Evensen Norsk Hydro, Oil and Energy Research Centre, Bergen PO Box 7190 - N 5020 Bergen, Norway Geir.Evensen@hydro.com
The Ensemble Kalman Filter: Theoretical Formulation and Practical Implementation Geir Evensen Norsk Hydro, Oil and Energy Research Centre, Bergen PO Box 7190 - N 5020 Bergen, Norway Geir.Evensen@hydro.com
Particle Filtering for Data-Driven Simulation and Optimization
 Particle Filtering for Data-Driven Simulation and Optimization John R. Birge The University of Chicago Booth School of Business Includes joint work with Nicholas Polson. JRBirge INFORMS Phoenix, October
Particle Filtering for Data-Driven Simulation and Optimization John R. Birge The University of Chicago Booth School of Business Includes joint work with Nicholas Polson. JRBirge INFORMS Phoenix, October
Robust Ensemble Filtering With Improved Storm Surge Forecasting
 Robust Ensemble Filtering With Improved Storm Surge Forecasting U. Altaf, T. Buttler, X. Luo, C. Dawson, T. Mao, I.Hoteit Meteo France, Toulouse, Nov 13, 2012 Project Ensemble data assimilation for storm
Robust Ensemble Filtering With Improved Storm Surge Forecasting U. Altaf, T. Buttler, X. Luo, C. Dawson, T. Mao, I.Hoteit Meteo France, Toulouse, Nov 13, 2012 Project Ensemble data assimilation for storm
Finite-size ensemble Kalman filters (EnKF-N)
") Finite-size ensemble Kalman filters (EnKF-N) Marc Bocquet (1,2), Pavel Sakov (3,4) (1) Université Paris-Est, CEREA, joint lab École des Ponts ParisTech and EdF R&D, France (2) INRIA, Paris-Rocquencourt
Finite-size ensemble Kalman filters (EnKF-N) Marc Bocquet (1,2), Pavel Sakov (3,4) (1) Université Paris-Est, CEREA, joint lab École des Ponts ParisTech and EdF R&D, France (2) INRIA, Paris-Rocquencourt
A new Hierarchical Bayes approach to ensemble-variational data assimilation
 A new Hierarchical Bayes approach to ensemble-variational data assimilation Michael Tsyrulnikov and Alexander Rakitko HydroMetCenter of Russia College Park, 20 Oct 2014 Michael Tsyrulnikov and Alexander
A new Hierarchical Bayes approach to ensemble-variational data assimilation Michael Tsyrulnikov and Alexander Rakitko HydroMetCenter of Russia College Park, 20 Oct 2014 Michael Tsyrulnikov and Alexander
Data assimilation : Basics and meteorology
 Data assimilation : Basics and meteorology Olivier Talagrand Laboratoire de Météorologie Dynamique, École Normale Supérieure, Paris, France Workshop on Coupled Climate-Economics Modelling and Data Analysis
Data assimilation : Basics and meteorology Olivier Talagrand Laboratoire de Météorologie Dynamique, École Normale Supérieure, Paris, France Workshop on Coupled Climate-Economics Modelling and Data Analysis
Maximum Likelihood Ensemble Filter Applied to Multisensor Systems
 Maximum Likelihood Ensemble Filter Applied to Multisensor Systems Arif R. Albayrak a, Milija Zupanski b and Dusanka Zupanski c abc Colorado State University (CIRA), 137 Campus Delivery Fort Collins, CO
Maximum Likelihood Ensemble Filter Applied to Multisensor Systems Arif R. Albayrak a, Milija Zupanski b and Dusanka Zupanski c abc Colorado State University (CIRA), 137 Campus Delivery Fort Collins, CO
Four-Dimensional Ensemble Kalman Filtering
 Four-Dimensional Ensemble Kalman Filtering B.R. Hunt, E. Kalnay, E.J. Kostelich, E. Ott, D.J. Patil, T. Sauer, I. Szunyogh, J.A. Yorke, A.V. Zimin University of Maryland, College Park, MD 20742, USA Ensemble
Four-Dimensional Ensemble Kalman Filtering B.R. Hunt, E. Kalnay, E.J. Kostelich, E. Ott, D.J. Patil, T. Sauer, I. Szunyogh, J.A. Yorke, A.V. Zimin University of Maryland, College Park, MD 20742, USA Ensemble
A new unscented Kalman filter with higher order moment-matching
 A new unscented Kalman filter with higher order moment-matching KSENIA PONOMAREVA, PARESH DATE AND ZIDONG WANG Department of Mathematical Sciences, Brunel University, Uxbridge, UB8 3PH, UK. Abstract This
A new unscented Kalman filter with higher order moment-matching KSENIA PONOMAREVA, PARESH DATE AND ZIDONG WANG Department of Mathematical Sciences, Brunel University, Uxbridge, UB8 3PH, UK. Abstract This
The Ensemble Kalman Filter: Theoretical Formulation and Practical Implementation
 Noname manuscript No. (will be inserted by the editor) The Ensemble Kalman Filter: Theoretical Formulation and Practical Implementation Geir Evensen Nansen Environmental and Remote Sensing Center, Bergen
Noname manuscript No. (will be inserted by the editor) The Ensemble Kalman Filter: Theoretical Formulation and Practical Implementation Geir Evensen Nansen Environmental and Remote Sensing Center, Bergen
Fundamentals of Data Assimila1on
 014 GSI Community Tutorial NCAR Foothills Campus, Boulder, CO July 14-16, 014 Fundamentals of Data Assimila1on Milija Zupanski Cooperative Institute for Research in the Atmosphere Colorado State University
014 GSI Community Tutorial NCAR Foothills Campus, Boulder, CO July 14-16, 014 Fundamentals of Data Assimila1on Milija Zupanski Cooperative Institute for Research in the Atmosphere Colorado State University
A Stochastic Collocation based. for Data Assimilation
 A Stochastic Collocation based Kalman Filter (SCKF) for Data Assimilation Lingzao Zeng and Dongxiao Zhang University of Southern California August 11, 2009 Los Angeles Outline Introduction SCKF Algorithm
A Stochastic Collocation based Kalman Filter (SCKF) for Data Assimilation Lingzao Zeng and Dongxiao Zhang University of Southern California August 11, 2009 Los Angeles Outline Introduction SCKF Algorithm
Abstract 2. ENSEMBLE KALMAN FILTERS 1. INTRODUCTION
 J5.4 4D ENSEMBLE KALMAN FILTERING FOR ASSIMILATION OF ASYNCHRONOUS OBSERVATIONS T. Sauer George Mason University, Fairfax, VA 22030 B.R. Hunt, J.A. Yorke, A.V. Zimin, E. Ott, E.J. Kostelich, I. Szunyogh,
J5.4 4D ENSEMBLE KALMAN FILTERING FOR ASSIMILATION OF ASYNCHRONOUS OBSERVATIONS T. Sauer George Mason University, Fairfax, VA 22030 B.R. Hunt, J.A. Yorke, A.V. Zimin, E. Ott, E.J. Kostelich, I. Szunyogh,
Sequential Monte Carlo Samplers for Applications in High Dimensions
 Sequential Monte Carlo Samplers for Applications in High Dimensions Alexandros Beskos National University of Singapore KAUST, 26th February 2014 Joint work with: Dan Crisan, Ajay Jasra, Nik Kantas, Alex
Sequential Monte Carlo Samplers for Applications in High Dimensions Alexandros Beskos National University of Singapore KAUST, 26th February 2014 Joint work with: Dan Crisan, Ajay Jasra, Nik Kantas, Alex
STA 4273H: Statistical Machine Learning
 STA 4273H: Statistical Machine Learning Russ Salakhutdinov Department of Statistics! rsalakhu@utstat.toronto.edu! http://www.utstat.utoronto.ca/~rsalakhu/ Sidney Smith Hall, Room 6002 Lecture 11 Project
STA 4273H: Statistical Machine Learning Russ Salakhutdinov Department of Statistics! rsalakhu@utstat.toronto.edu! http://www.utstat.utoronto.ca/~rsalakhu/ Sidney Smith Hall, Room 6002 Lecture 11 Project
Crib Sheet : Linear Kalman Smoothing
 Crib Sheet : Linear Kalman Smoothing Gabriel A. Terejanu Department of Computer Science and Engineering University at Buffalo, Buffalo, NY 14260 terejanu@buffalo.edu 1 Introduction Smoothing can be separated
Crib Sheet : Linear Kalman Smoothing Gabriel A. Terejanu Department of Computer Science and Engineering University at Buffalo, Buffalo, NY 14260 terejanu@buffalo.edu 1 Introduction Smoothing can be separated
A data-driven method for improving the correlation estimation in serial ensemble Kalman filter
 A data-driven method for improving the correlation estimation in serial ensemble Kalman filter Michèle De La Chevrotière, 1 John Harlim 2 1 Department of Mathematics, Penn State University, 2 Department
A data-driven method for improving the correlation estimation in serial ensemble Kalman filter Michèle De La Chevrotière, 1 John Harlim 2 1 Department of Mathematics, Penn State University, 2 Department
Modeling and state estimation Examples State estimation Probabilities Bayes filter Particle filter. Modeling. CSC752 Autonomous Robotic Systems
 Modeling CSC752 Autonomous Robotic Systems Ubbo Visser Department of Computer Science University of Miami February 21, 2017 Outline 1 Modeling and state estimation 2 Examples 3 State estimation 4 Probabilities
Modeling CSC752 Autonomous Robotic Systems Ubbo Visser Department of Computer Science University of Miami February 21, 2017 Outline 1 Modeling and state estimation 2 Examples 3 State estimation 4 Probabilities
State and Parameter Estimation in Stochastic Dynamical Models
 State and Parameter Estimation in Stochastic Dynamical Models Timothy DelSole George Mason University, Fairfax, Va and Center for Ocean-Land-Atmosphere Studies, Calverton, MD June 21, 2011 1 1 collaboration
State and Parameter Estimation in Stochastic Dynamical Models Timothy DelSole George Mason University, Fairfax, Va and Center for Ocean-Land-Atmosphere Studies, Calverton, MD June 21, 2011 1 1 collaboration
Data assimilation in high dimensions
 Data assimilation in high dimensions David Kelly Courant Institute New York University New York NY www.dtbkelly.com February 12, 2015 Graduate seminar, CIMS David Kelly (CIMS) Data assimilation February
Data assimilation in high dimensions David Kelly Courant Institute New York University New York NY www.dtbkelly.com February 12, 2015 Graduate seminar, CIMS David Kelly (CIMS) Data assimilation February
Ensemble Data Assimilation and Uncertainty Quantification
 Ensemble Data Assimilation and Uncertainty Quantification Jeff Anderson National Center for Atmospheric Research pg 1 What is Data Assimilation? Observations combined with a Model forecast + to produce
Ensemble Data Assimilation and Uncertainty Quantification Jeff Anderson National Center for Atmospheric Research pg 1 What is Data Assimilation? Observations combined with a Model forecast + to produce
Computer Intensive Methods in Mathematical Statistics
 Computer Intensive Methods in Mathematical Statistics Department of mathematics johawes@kth.se Lecture 16 Advanced topics in computational statistics 18 May 2017 Computer Intensive Methods (1) Plan of
Computer Intensive Methods in Mathematical Statistics Department of mathematics johawes@kth.se Lecture 16 Advanced topics in computational statistics 18 May 2017 Computer Intensive Methods (1) Plan of
Par$cle Filters Part I: Theory. Peter Jan van Leeuwen Data- Assimila$on Research Centre DARC University of Reading
 Par$cle Filters Part I: Theory Peter Jan van Leeuwen Data- Assimila$on Research Centre DARC University of Reading Reading July 2013 Why Data Assimila$on Predic$on Model improvement: - Parameter es$ma$on
Par$cle Filters Part I: Theory Peter Jan van Leeuwen Data- Assimila$on Research Centre DARC University of Reading Reading July 2013 Why Data Assimila$on Predic$on Model improvement: - Parameter es$ma$on
Constrained State Estimation Using the Unscented Kalman Filter
 16th Mediterranean Conference on Control and Automation Congress Centre, Ajaccio, France June 25-27, 28 Constrained State Estimation Using the Unscented Kalman Filter Rambabu Kandepu, Lars Imsland and
16th Mediterranean Conference on Control and Automation Congress Centre, Ajaccio, France June 25-27, 28 Constrained State Estimation Using the Unscented Kalman Filter Rambabu Kandepu, Lars Imsland and
Inverse methods and data assimilation
 Inverse methods and data assimilation 1 Introduction, and simple but essential exemple 3 1.1 What is an inverse problem........................... 3 1.2 A simple example................................
Inverse methods and data assimilation 1 Introduction, and simple but essential exemple 3 1.1 What is an inverse problem........................... 3 1.2 A simple example................................
Stochastic Collocation Methods for Polynomial Chaos: Analysis and Applications
 Stochastic Collocation Methods for Polynomial Chaos: Analysis and Applications Dongbin Xiu Department of Mathematics, Purdue University Support: AFOSR FA955-8-1-353 (Computational Math) SF CAREER DMS-64535
Stochastic Collocation Methods for Polynomial Chaos: Analysis and Applications Dongbin Xiu Department of Mathematics, Purdue University Support: AFOSR FA955-8-1-353 (Computational Math) SF CAREER DMS-64535
arxiv: v1 [physics.ao-ph] 23 Jan 2009
![arxiv: v1 [physics.ao-ph] 23 Jan 2009](/thumbs/83/88185003.jpg "arxiv: v1 [physics.ao-ph] 23 Jan 2009") A Brief Tutorial on the Ensemble Kalman Filter Jan Mandel arxiv:0901.3725v1 [physics.ao-ph] 23 Jan 2009 February 2007, updated January 2009 Abstract The ensemble Kalman filter EnKF) is a recursive filter
A Brief Tutorial on the Ensemble Kalman Filter Jan Mandel arxiv:0901.3725v1 [physics.ao-ph] 23 Jan 2009 February 2007, updated January 2009 Abstract The ensemble Kalman filter EnKF) is a recursive filter
(Extended) Kalman Filter
 Kalman Filter") (Extended) Kalman Filter Brian Hunt 7 June 2013 Goals of Data Assimilation (DA) Estimate the state of a system based on both current and all past observations of the system, using a model for the system
(Extended) Kalman Filter Brian Hunt 7 June 2013 Goals of Data Assimilation (DA) Estimate the state of a system based on both current and all past observations of the system, using a model for the system
4DEnVar. Four-Dimensional Ensemble-Variational Data Assimilation. Colloque National sur l'assimilation de données
 Four-Dimensional Ensemble-Variational Data Assimilation 4DEnVar Colloque National sur l'assimilation de données Andrew Lorenc, Toulouse France. 1-3 décembre 2014 Crown copyright Met Office 4DEnVar: Topics
Four-Dimensional Ensemble-Variational Data Assimilation 4DEnVar Colloque National sur l'assimilation de données Andrew Lorenc, Toulouse France. 1-3 décembre 2014 Crown copyright Met Office 4DEnVar: Topics
Adaptive Data Assimilation and Multi-Model Fusion
 Adaptive Data Assimilation and Multi-Model Fusion Pierre F.J. Lermusiaux, Oleg G. Logoutov and Patrick J. Haley Jr. Mechanical Engineering and Ocean Science and Engineering, MIT We thank: Allan R. Robinson
Adaptive Data Assimilation and Multi-Model Fusion Pierre F.J. Lermusiaux, Oleg G. Logoutov and Patrick J. Haley Jr. Mechanical Engineering and Ocean Science and Engineering, MIT We thank: Allan R. Robinson
Markov Chain Monte Carlo Methods for Stochastic
 Markov Chain Monte Carlo Methods for Stochastic Optimization i John R. Birge The University of Chicago Booth School of Business Joint work with Nicholas Polson, Chicago Booth. JRBirge U Florida, Nov 2013
Markov Chain Monte Carlo Methods for Stochastic Optimization i John R. Birge The University of Chicago Booth School of Business Joint work with Nicholas Polson, Chicago Booth. JRBirge U Florida, Nov 2013
Data assimilation Schrödinger s perspective
 Data assimilation Schrödinger s perspective Sebastian Reich (www.sfb1294.de) Universität Potsdam/ University of Reading IMS NUS, August 3, 218 Universität Potsdam/ University of Reading 1 Core components
Data assimilation Schrödinger s perspective Sebastian Reich (www.sfb1294.de) Universität Potsdam/ University of Reading IMS NUS, August 3, 218 Universität Potsdam/ University of Reading 1 Core components
Model Uncertainty Quantification for Data Assimilation in partially observed Lorenz 96
 Model Uncertainty Quantification for Data Assimilation in partially observed Lorenz 96 Sahani Pathiraja, Peter Jan Van Leeuwen Institut für Mathematik Universität Potsdam With thanks: Sebastian Reich,
Model Uncertainty Quantification for Data Assimilation in partially observed Lorenz 96 Sahani Pathiraja, Peter Jan Van Leeuwen Institut für Mathematik Universität Potsdam With thanks: Sebastian Reich,
Advanced Computational Methods in Statistics: Lecture 5 Sequential Monte Carlo/Particle Filtering
 Advanced Computational Methods in Statistics: Lecture 5 Sequential Monte Carlo/Particle Filtering Axel Gandy Department of Mathematics Imperial College London http://www2.imperial.ac.uk/~agandy London
Advanced Computational Methods in Statistics: Lecture 5 Sequential Monte Carlo/Particle Filtering Axel Gandy Department of Mathematics Imperial College London http://www2.imperial.ac.uk/~agandy London
Data Assimilation with the Ensemble Kalman Filter and the SEIK Filter applied to a Finite Element Model of the North Atlantic
 Data Assimilation with the Ensemble Kalman Filter and the SEIK Filter applied to a Finite Element Model of the North Atlantic L. Nerger S. Danilov, G. Kivman, W. Hiller, and J. Schröter Alfred Wegener
Data Assimilation with the Ensemble Kalman Filter and the SEIK Filter applied to a Finite Element Model of the North Atlantic L. Nerger S. Danilov, G. Kivman, W. Hiller, and J. Schröter Alfred Wegener
Local Ensemble Transform Kalman Filter
 Local Ensemble Transform Kalman Filter Brian Hunt 11 June 2013 Review of Notation Forecast model: a known function M on a vector space of model states. Truth: an unknown sequence {x n } of model states
Local Ensemble Transform Kalman Filter Brian Hunt 11 June 2013 Review of Notation Forecast model: a known function M on a vector space of model states. Truth: an unknown sequence {x n } of model states
Data assimilation; comparison of 4D-Var and LETKF smoothers
 Data assimilation; comparison of 4D-Var and LETKF smoothers Eugenia Kalnay and many friends University of Maryland CSCAMM DAS13 June 2013 Contents First part: Forecasting the weather - we are really getting
Data assimilation; comparison of 4D-Var and LETKF smoothers Eugenia Kalnay and many friends University of Maryland CSCAMM DAS13 June 2013 Contents First part: Forecasting the weather - we are really getting
NON-LINEAR NOISE ADAPTIVE KALMAN FILTERING VIA VARIATIONAL BAYES
 2013 IEEE INTERNATIONAL WORKSHOP ON MACHINE LEARNING FOR SIGNAL PROCESSING NON-LINEAR NOISE ADAPTIVE KALMAN FILTERING VIA VARIATIONAL BAYES Simo Särä Aalto University, 02150 Espoo, Finland Jouni Hartiainen
2013 IEEE INTERNATIONAL WORKSHOP ON MACHINE LEARNING FOR SIGNAL PROCESSING NON-LINEAR NOISE ADAPTIVE KALMAN FILTERING VIA VARIATIONAL BAYES Simo Särä Aalto University, 02150 Espoo, Finland Jouni Hartiainen
EnKF Review. P.L. Houtekamer 7th EnKF workshop Introduction to the EnKF. Challenges. The ultimate global EnKF algorithm
 Overview 1 2 3 Review of the Ensemble Kalman Filter for Atmospheric Data Assimilation 6th EnKF Purpose EnKF equations localization After the 6th EnKF (2014), I decided with Prof. Zhang to summarize progress
Overview 1 2 3 Review of the Ensemble Kalman Filter for Atmospheric Data Assimilation 6th EnKF Purpose EnKF equations localization After the 6th EnKF (2014), I decided with Prof. Zhang to summarize progress
Mini-Course 07 Kalman Particle Filters. Henrique Massard da Fonseca Cesar Cunha Pacheco Wellington Bettencurte Julio Dutra
 Mini-Course 07 Kalman Particle Filters Henrique Massard da Fonseca Cesar Cunha Pacheco Wellington Bettencurte Julio Dutra Agenda State Estimation Problems & Kalman Filter Henrique Massard Steady State
Mini-Course 07 Kalman Particle Filters Henrique Massard da Fonseca Cesar Cunha Pacheco Wellington Bettencurte Julio Dutra Agenda State Estimation Problems & Kalman Filter Henrique Massard Steady State
Adaptive ensemble Kalman filtering of nonlinear systems
 Adaptive ensemble Kalman filtering of nonlinear systems Tyrus Berry George Mason University June 12, 213 : Problem Setup We consider a system of the form: x k+1 = f (x k ) + ω k+1 ω N (, Q) y k+1 = h(x
Adaptive ensemble Kalman filtering of nonlinear systems Tyrus Berry George Mason University June 12, 213 : Problem Setup We consider a system of the form: x k+1 = f (x k ) + ω k+1 ω N (, Q) y k+1 = h(x
RECURSIVE OUTLIER-ROBUST FILTERING AND SMOOTHING FOR NONLINEAR SYSTEMS USING THE MULTIVARIATE STUDENT-T DISTRIBUTION
 1 IEEE INTERNATIONAL WORKSHOP ON MACHINE LEARNING FOR SIGNAL PROCESSING, SEPT. 3 6, 1, SANTANDER, SPAIN RECURSIVE OUTLIER-ROBUST FILTERING AND SMOOTHING FOR NONLINEAR SYSTEMS USING THE MULTIVARIATE STUDENT-T
1 IEEE INTERNATIONAL WORKSHOP ON MACHINE LEARNING FOR SIGNAL PROCESSING, SEPT. 3 6, 1, SANTANDER, SPAIN RECURSIVE OUTLIER-ROBUST FILTERING AND SMOOTHING FOR NONLINEAR SYSTEMS USING THE MULTIVARIATE STUDENT-T
Bayesian Calibration of Simulators with Structured Discretization Uncertainty
 Bayesian Calibration of Simulators with Structured Discretization Uncertainty Oksana A. Chkrebtii Department of Statistics, The Ohio State University Joint work with Matthew T. Pratola (Statistics, The
Bayesian Calibration of Simulators with Structured Discretization Uncertainty Oksana A. Chkrebtii Department of Statistics, The Ohio State University Joint work with Matthew T. Pratola (Statistics, The
Expectation propagation for signal detection in flat-fading channels
 Expectation propagation for signal detection in flat-fading channels Yuan Qi MIT Media Lab Cambridge, MA, 02139 USA yuanqi@media.mit.edu Thomas Minka CMU Statistics Department Pittsburgh, PA 15213 USA
Expectation propagation for signal detection in flat-fading channels Yuan Qi MIT Media Lab Cambridge, MA, 02139 USA yuanqi@media.mit.edu Thomas Minka CMU Statistics Department Pittsburgh, PA 15213 USA
Adaptive State Estimation Robert Stengel Optimal Control and Estimation MAE 546 Princeton University, 2018
 Adaptive State Estimation Robert Stengel Optimal Control and Estimation MAE 546 Princeton University, 218! Nonlinearity of adaptation! Parameter-adaptive filtering! Test for whiteness of the residual!
Adaptive State Estimation Robert Stengel Optimal Control and Estimation MAE 546 Princeton University, 218! Nonlinearity of adaptation! Parameter-adaptive filtering! Test for whiteness of the residual!
Demonstration and Comparison of of Sequential Approaches for Altimeter Data Assimilation in in HYCOM
 Demonstration and Comparison of of Sequential Approaches for Altimeter Data Assimilation in in HYCOM A. Srinivasan, E. P. Chassignet, O. M. Smedstad, C. Thacker, L. Bertino, P. Brasseur, T. M. Chin,, F.
Demonstration and Comparison of of Sequential Approaches for Altimeter Data Assimilation in in HYCOM A. Srinivasan, E. P. Chassignet, O. M. Smedstad, C. Thacker, L. Bertino, P. Brasseur, T. M. Chin,, F.
Ensemble prediction and strategies for initialization: Tangent Linear and Adjoint Models, Singular Vectors, Lyapunov vectors
 Ensemble prediction and strategies for initialization: Tangent Linear and Adjoint Models, Singular Vectors, Lyapunov vectors Eugenia Kalnay Lecture 2 Alghero, May 2008 Elements of Ensemble Forecasting
Ensemble prediction and strategies for initialization: Tangent Linear and Adjoint Models, Singular Vectors, Lyapunov vectors Eugenia Kalnay Lecture 2 Alghero, May 2008 Elements of Ensemble Forecasting
Hidden Markov models 1
 Hidden Markov models 1 Outline Time and uncertainty Markov process Hidden Markov models Inference: filtering, prediction, smoothing Most likely explanation: Viterbi 2 Time and uncertainty The world changes;
Hidden Markov models 1 Outline Time and uncertainty Markov process Hidden Markov models Inference: filtering, prediction, smoothing Most likely explanation: Viterbi 2 Time and uncertainty The world changes;
Data assimilation with and without a model
 Data assimilation with and without a model Tim Sauer George Mason University Parameter estimation and UQ U. Pittsburgh Mar. 5, 2017 Partially supported by NSF Most of this work is due to: Tyrus Berry,
Data assimilation with and without a model Tim Sauer George Mason University Parameter estimation and UQ U. Pittsburgh Mar. 5, 2017 Partially supported by NSF Most of this work is due to: Tyrus Berry,
Forecasting and data assimilation
 Supported by the National Science Foundation DMS Forecasting and data assimilation Outline Numerical models Kalman Filter Ensembles Douglas Nychka, Thomas Bengtsson, Chris Snyder Geophysical Statistics
Supported by the National Science Foundation DMS Forecasting and data assimilation Outline Numerical models Kalman Filter Ensembles Douglas Nychka, Thomas Bengtsson, Chris Snyder Geophysical Statistics
Four-dimensional ensemble Kalman filtering
 Tellus (24), 56A, 273 277 Copyright C Blackwell Munksgaard, 24 Printed in UK. All rights reserved TELLUS Four-dimensional ensemble Kalman filtering By B. R. HUNT 1, E. KALNAY 1, E. J. KOSTELICH 2,E.OTT
Tellus (24), 56A, 273 277 Copyright C Blackwell Munksgaard, 24 Printed in UK. All rights reserved TELLUS Four-dimensional ensemble Kalman filtering By B. R. HUNT 1, E. KALNAY 1, E. J. KOSTELICH 2,E.OTT
Fundamentals of Data Assimila1on
 2015 GSI Community Tutorial NCAR Foothills Campus, Boulder, CO August 11-14, 2015 Fundamentals of Data Assimila1on Milija Zupanski Cooperative Institute for Research in the Atmosphere Colorado State University
2015 GSI Community Tutorial NCAR Foothills Campus, Boulder, CO August 11-14, 2015 Fundamentals of Data Assimila1on Milija Zupanski Cooperative Institute for Research in the Atmosphere Colorado State University
Local Ensemble Transform Kalman Filter: An Efficient Scheme for Assimilating Atmospheric Data
 Local Ensemble Transform Kalman Filter: An Efficient Scheme for Assimilating Atmospheric Data John Harlim and Brian R. Hunt Department of Mathematics and Institute for Physical Science and Technology University
Local Ensemble Transform Kalman Filter: An Efficient Scheme for Assimilating Atmospheric Data John Harlim and Brian R. Hunt Department of Mathematics and Institute for Physical Science and Technology University
HMM part 1. Dr Philip Jackson
 Centre for Vision Speech & Signal Processing University of Surrey, Guildford GU2 7XH. HMM part 1 Dr Philip Jackson Probability fundamentals Markov models State topology diagrams Hidden Markov models -
Centre for Vision Speech & Signal Processing University of Surrey, Guildford GU2 7XH. HMM part 1 Dr Philip Jackson Probability fundamentals Markov models State topology diagrams Hidden Markov models -