ENGI9496 Modeling and Simulation of Dynamic Systems Bond Graphs
|
|
|
- Daniella Smith
- 5 years ago
- Views:
Transcription
1 ENGI9496 Modeling and Simulation of Dynamic Systems Bond Graphs Topics covered so far: Analogies between mechanical (translation and rotation), fluid, and electrical systems o Review of domain-specific elements and constitutive laws o Review of transformer and gyrator elements (power-conserving transformations) o Review of interconnection laws (energy flow conduits among elements) State equation generation o State variables associated with energy storage elements o Generated equations for mechanical, electrical and hydraulic systems o Explicit ODE s first order; state variable derivatives are algebraic functions of state variables and inputs o Implicit ODE s can arise when energy storage elements are dependent state variable derivatives on left and right-hand sides of equations o Differential-algebraic equations can arise when an algebraic relation exists among state variables, instead of a differential equation (recall massless connection) Shortcomings in the traditional equation formulation method (gathering all the constitutive laws and attempting to combine them into a coherent set of state equations): Selection of state variables is not always obvious Sometimes not clear which of two possible equations to use to define a variable (recall fluid system example with two possible ways to express fluid inertia flow rate) Can be difficult to anticipate or recognize state variable dependencies These shortcomings will be addressed by expressing models from mechanical, electrical and fluid domains in terms of generalized elements. All domains will look identical. Formal algorithmic procedures will be applied to generate equations. 1. Generalized Variables and Power Ports Recall we can express power as the product of generalized effort and flow P = e(t)f(t) and we can define generalized quantities applicable to all energy domains. effort e and flow f momentum p (integral of effort) displacement q (integral of flow) For a system that contains multiple components joined together Components are connected at ports When two components are joined, the two complementary power variables are simultaneously constrained to be equal for both components at the port o e.g., from recent example, torque and speed at the end of the motor output shaft have the same magnitudes as torque and speed at the pump input shaft 1
2 2. List of Generalized Elements Any dynamic lumped-parameter system can be modeled using the following set of generalized elements: Kirchoff s loop (all elements in loop have same flow, efforts sum to zero) Kirchoff s node (all elements at node have same effort, flows sum to zero) Dissipator (dumps energy to environment) Potential energy storage device (energy is a function of displacement) Kinetic energy storage device (energy is a function of momentum) Source (of effort or flow, prescribed from the environment) Transformer (relates effort to effort, flow to flow; either within or between two different energy domains) Gyrator (relates effort to flow, flow to effort) 3. The Power Bond Half-Arrows and Causal Strokes In bond graphs, the system elements are connected by power bonds. Each bond contains an effort and flow signal. In block diagrams, effort and flow would be shown as separate, individual signals. Each bond has the following: half-arrow to indicate direction of algebraically positive power flow A e f B Instantaneously, power may flow from element A to B, or from B to A. However, if power is algebraically positive, then it is flowing from A to B. Half-arrow is related to sign convention. causal stroke to indicate the input to the element s constitutive law equation f = Ф A (e) A e f B e= Ф B (f) e= Ф A -1(f) A e f B f= Ф B -1(e) In the left figure, the equation for element A has f on the lefthand side (LHS). Flow is the output. Element B takes that flow, plugs it into the right-hand side (RHS) of its equation, and computes effort e. e is therefore on the LHS of element B s equation. e is plugged into the RHS of element A s equation, to generate f. Causal strokes are completely independent of half-arrows. Moving the causal stroke, as in the right figure, means we rearrange the equations, but power is still flowing from A to B when it is positive. Causal stroke is related to input-output form of the equations 2
3 4. Generalized Bond Graph Elements The following pages describe the specific elements and their generalized constitutive laws and energy equations. 1. Generalized Inertia (Kinetic Energy storage) I element: static relation between flow and momentum electrical relation between flux and current typically nonlinear mechanical typically linear except for relativistic mechanics, where momentum is nonlinear function of velocity preferred integral causality effort in, flow out half-arrow always goes into I element o define positive force and positive velocity in the same direction o if force and velocity are in the same direction, the mass will accelerate because power is flowing into it and being converted to kinetic energy a) system applying positive force, velocity in positive direction (positive power flow) Power flows from system into mass, increasing its kinetic energy. b) system applying negative force, velocity in negative direction (positive power flow) Power flows from system into mass, increasing its kinetic energy. 3
4 c) instantaneously negative power flow (positive force, negative velocity) System is slowing mass down. Power flows from mass into system. The mass transfers its kinetic energy back to the system. Energy Storage This doesn t change the half-arrow direction. The half-arrow direction is our sign convention, stating simply that if power were positive, it would be flowing into the mass. That s still true in this case. Power is negative right now, so it s not flowing into the mass. Causality Integral (preferred) Derivative - numerical integration is stable and good - numerical differentiation can be unstable 4
5 2. Generalized Capacitor (Potential Energy storage) C element: static relation between effort and displacement linear or nonlinear constitutive law can be offset from origin: spring deflection defined as zero for nonzero force (mass hanging from spring in gravity field) preferred integral causality flow in, effort out half-arrow always into C element o if a tensile force is acting on the spring, and it is getting longer, then power is flowing into the spring from the system, and its potential energy is increasing o if a tensile force is acting, but the spring is shortening, then the spring is returning some if its potential energy to the system o in either case, if extension and force are both positive in tension (or compression), then power will be flowing into the spring if power is positive 5
6 Energy Storage Causality Integral (preferred) Derivative - numerical integration is stable and good - numerical differentiation can be unstable 6
7 3. Generalized Dissipator static relation (linear or nonlinear) between effort and flow R element constitutive law must be in first and third quadrant to be passive power must always flow out of the system and into a passive resistor causality does not matter if the constitutive law is invertible half arrow always into R element (energy always flows from the system into the environment. Power is always positive.) 7
8 4. Sources (non-dissipative energy exchange with environment) power flow can be instantaneously into or out of source element, but algebraically positive power direction will be fixed half-arrow typically out of source, but not always bond graph element Se, Sf ideal vs. non-ideal sources (battery in Figure 3.7) causality is fixed Se has effort out to system, Sf has flow out to system 8
9 Example of ideal source which often has half-arrow into the source element: gravity A. Force and velocity positive downward downward gravity force, if mass is moving downward, is increasing kinetic energy of mass. Thus, power flows out of source (Earth s gravitational field) and into the mass when positive. B. Force and velocity positive upward if mass is moving up (positive velocity), and gravity force mg is positive, the gravity source is slowing the mass down. Kinetic energy flows out of the mass and into the Earth s gravitational field. You can change the half-arrow direction by considering gravity to be -mg upward and velocity positive upward. In this case, with the mass moving upwards, -mg times v will be negative, and power will be instantaneously flowing out of the mass, into the source. If v is negative, then -mg times v is positive and the falling mass is receiving power from the gravitational source. 9
10 5. Generalized Kirchoff Loops and Nodes 0-junction: all connected elements have same effort, flows sum to zero (e.g., node in electrical circuit) 1-junction: all connected elements have same flow, efforts sum to zero (e.g., Newton s law for a mass, loop in electrical circuit) algebraic signs in effort and flow summations are determined by half-arrows causal strokes determine which variables are outputs and inputs causality restriction: there can be only one flow input to a 1-junction, and only one effort input to a 0-junction 10
11 11
12 6. Power-Conserving Transformations transformer TF: relates effort to effort, and flow to flow either within a single energy domain, or between two different energy domains gyrator GY: relates effort to flow, and flow to effort (but is power-conserving, unlike an R element) transformer and gyrator modulus (lever ratio, piston area, etc.) may be constant, or may be varying. If the modulus is generated somewhere else in the system, or externally, it must be sent to the TF or GY element by a signal. A TF or GY element with a modulating signal is called a modulated transformer (MTF), or modulated gyrator (MGY). causality restrictions in Table
13 13
14 14
15 5. Examples 1. Electrical System 2. Mechanical System (Translational) 3. Mechanical System (Planar motion) 4. Hydraulic System 15
 16")
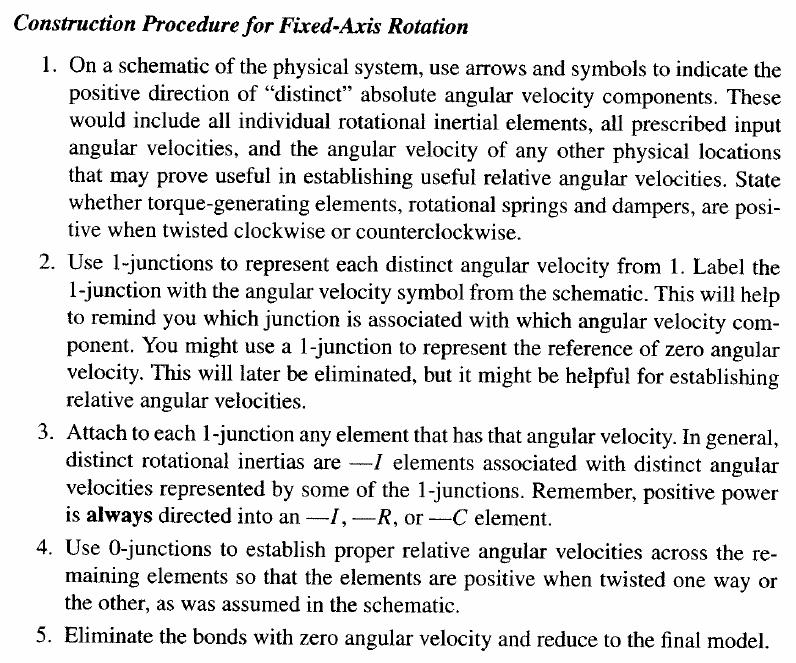
16 6. Procedures for Assembling Bond Graphs for Different Types of Systems (from Karnopp et al., System Dynamics, 4 th Edition) 16
17 17
18 18


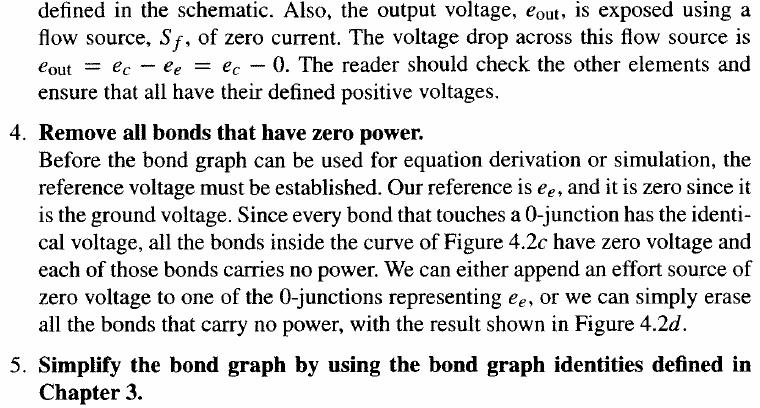
19 See text for figures corresponding to the following electrical circuit procedure. 19
20 20
Modeling of Dynamic Systems: Notes on Bond Graphs Version 1.0 Copyright Diane L. Peters, Ph.D., P.E.
 Modeling of Dynamic Systems: Notes on Bond Graphs Version 1.0 Copyright 2015 Diane L. Peters, Ph.D., P.E. Spring 2015 2 Contents 1 Overview of Dynamic Modeling 5 2 Bond Graph Basics 7 2.1 Causality.............................
Modeling of Dynamic Systems: Notes on Bond Graphs Version 1.0 Copyright 2015 Diane L. Peters, Ph.D., P.E. Spring 2015 2 Contents 1 Overview of Dynamic Modeling 5 2 Bond Graph Basics 7 2.1 Causality.............................
NONLINEAR MECHANICAL SYSTEMS (MECHANISMS)
") NONLINEAR MECHANICAL SYSTEMS (MECHANISMS) The analogy between dynamic behavior in different energy domains can be useful. Closer inspection reveals that the analogy is not complete. One key distinction
NONLINEAR MECHANICAL SYSTEMS (MECHANISMS) The analogy between dynamic behavior in different energy domains can be useful. Closer inspection reveals that the analogy is not complete. One key distinction
Mechatronics 1: ME 392Q-6 & 348C 31-Aug-07 M.D. Bryant. Analogous Systems. e(t) Se: e. ef = p/i. q = p /I, p = " q C " R p I + e(t)
 Se: e. ef = p/i. q = p /I, p = q C R p I + e(t)") V + - K R + - - k b V R V L L J + V C M B Analogous Systems i = q. + ω = θ. C -. λ/l = q v = x F T. Se: e e(t) e = p/i R: R 1 I: I e C = q/c C = dq/dt e I = dp/dt Identical dierential equations & bond
V + - K R + - - k b V R V L L J + V C M B Analogous Systems i = q. + ω = θ. C -. λ/l = q v = x F T. Se: e e(t) e = p/i R: R 1 I: I e C = q/c C = dq/dt e I = dp/dt Identical dierential equations & bond
The POG Modeling Technique Applied to Electrical Systems
 The POG Modeling Technique Applied to Electrical Systems Roberto ZANASI Computer Science Engineering Department (DII) University of Modena and Reggio Emilia Italy E-mail: roberto.zanasi@unimo.it Outline
The POG Modeling Technique Applied to Electrical Systems Roberto ZANASI Computer Science Engineering Department (DII) University of Modena and Reggio Emilia Italy E-mail: roberto.zanasi@unimo.it Outline
Regular Physics Semester 1
 Regular Physics Semester 1 1.1.Can define major components of the scientific method 1.2.Can accurately carry out conversions using dimensional analysis 1.3.Can utilize and convert metric prefixes 1.4.Can
Regular Physics Semester 1 1.1.Can define major components of the scientific method 1.2.Can accurately carry out conversions using dimensional analysis 1.3.Can utilize and convert metric prefixes 1.4.Can
Index. Index. More information. in this web service Cambridge University Press
 A-type elements, 4 7, 18, 31, 168, 198, 202, 219, 220, 222, 225 A-type variables. See Across variable ac current, 172, 251 ac induction motor, 251 Acceleration rotational, 30 translational, 16 Accumulator,
A-type elements, 4 7, 18, 31, 168, 198, 202, 219, 220, 222, 225 A-type variables. See Across variable ac current, 172, 251 ac induction motor, 251 Acceleration rotational, 30 translational, 16 Accumulator,
AP PHYSICS 1 Learning Objectives Arranged Topically
 AP PHYSICS 1 Learning Objectives Arranged Topically with o Big Ideas o Enduring Understandings o Essential Knowledges o Learning Objectives o Science Practices o Correlation to Knight Textbook Chapters
AP PHYSICS 1 Learning Objectives Arranged Topically with o Big Ideas o Enduring Understandings o Essential Knowledges o Learning Objectives o Science Practices o Correlation to Knight Textbook Chapters
HS AP Physics 1 Science
 Scope And Sequence Timeframe Unit Instructional Topics 5 Day(s) 20 Day(s) 5 Day(s) Kinematics Course AP Physics 1 is an introductory first-year, algebra-based, college level course for the student interested
Scope And Sequence Timeframe Unit Instructional Topics 5 Day(s) 20 Day(s) 5 Day(s) Kinematics Course AP Physics 1 is an introductory first-year, algebra-based, college level course for the student interested
A m. Q m P. piston or diaphragm
 Massachusetts Institute of echnology Department of Mechanical Engineering 2.141 Modeling and Simulation of Dynamic Systems 2.141 Assignment #3: GAS-CHARGED ACCUMULAOR he figure below (after Pourmovahed
Massachusetts Institute of echnology Department of Mechanical Engineering 2.141 Modeling and Simulation of Dynamic Systems 2.141 Assignment #3: GAS-CHARGED ACCUMULAOR he figure below (after Pourmovahed
Texas A & M University Department of Mechanical Engineering MEEN 364 Dynamic Systems and Controls Dr. Alexander G. Parlos
 Texas A & M University Department of Mechanical Engineering MEEN 364 Dynamic Systems and Controls Dr. Alexander G. Parlos Lecture 5: Electrical and Electromagnetic System Components The objective of this
Texas A & M University Department of Mechanical Engineering MEEN 364 Dynamic Systems and Controls Dr. Alexander G. Parlos Lecture 5: Electrical and Electromagnetic System Components The objective of this
Modeling and Computation
 Modeling and Computation James J. Nutaro August 24, 2016 2 Contents 1 Systems 5 1.1 Exercises............................................... 7 2 Modeling with bond graphs 9 2.1 One port elements..........................................
Modeling and Computation James J. Nutaro August 24, 2016 2 Contents 1 Systems 5 1.1 Exercises............................................... 7 2 Modeling with bond graphs 9 2.1 One port elements..........................................
2007 Problem Topic Comment 1 Kinematics Position-time equation Kinematics 7 2 Kinematics Velocity-time graph Dynamics 6 3 Kinematics Average velocity
 2007 Problem Topic Comment 1 Kinematics Position-time equation Kinematics 7 2 Kinematics Velocity-time graph Dynamics 6 3 Kinematics Average velocity Energy 7 4 Kinematics Free fall Collisions 3 5 Dynamics
2007 Problem Topic Comment 1 Kinematics Position-time equation Kinematics 7 2 Kinematics Velocity-time graph Dynamics 6 3 Kinematics Average velocity Energy 7 4 Kinematics Free fall Collisions 3 5 Dynamics
TOPIC E: OSCILLATIONS EXAMPLES SPRING Q1. Find general solutions for the following differential equations:
 TOPIC E: OSCILLATIONS EXAMPLES SPRING 2019 Mathematics of Oscillating Systems Q1. Find general solutions for the following differential equations: Undamped Free Vibration Q2. A 4 g mass is suspended by
TOPIC E: OSCILLATIONS EXAMPLES SPRING 2019 Mathematics of Oscillating Systems Q1. Find general solutions for the following differential equations: Undamped Free Vibration Q2. A 4 g mass is suspended by
AP Physics C Mechanics Objectives
 AP Physics C Mechanics Objectives I. KINEMATICS A. Motion in One Dimension 1. The relationships among position, velocity and acceleration a. Given a graph of position vs. time, identify or sketch a graph
AP Physics C Mechanics Objectives I. KINEMATICS A. Motion in One Dimension 1. The relationships among position, velocity and acceleration a. Given a graph of position vs. time, identify or sketch a graph
Chapter 1 Introduction to System Dynamics
 Chapter 1 Introduction to System Dynamics SAMANTHA RAMIREZ Introduction 1 What is System Dynamics? The synthesis of mathematical models to represent dynamic responses of physical systems for the purpose
Chapter 1 Introduction to System Dynamics SAMANTHA RAMIREZ Introduction 1 What is System Dynamics? The synthesis of mathematical models to represent dynamic responses of physical systems for the purpose
Dynamics. Dynamics of mechanical particle and particle systems (many body systems)
") Dynamics Dynamics of mechanical particle and particle systems (many body systems) Newton`s first law: If no net force acts on a body, it will move on a straight line at constant velocity or will stay at
Dynamics Dynamics of mechanical particle and particle systems (many body systems) Newton`s first law: If no net force acts on a body, it will move on a straight line at constant velocity or will stay at
AP PHYSICS 1 BIG IDEAS AND LEARNING OBJECTIVES
 AP PHYSICS 1 BIG IDEAS AND LEARNING OBJECTIVES KINEMATICS 3.A.1.1: The student is able to express the motion of an object using narrative, mathematical, and graphical representations. [SP 1.5, 2.1, 2.2]
AP PHYSICS 1 BIG IDEAS AND LEARNING OBJECTIVES KINEMATICS 3.A.1.1: The student is able to express the motion of an object using narrative, mathematical, and graphical representations. [SP 1.5, 2.1, 2.2]
Physics 1 Second Midterm Exam (AM) 2/25/2010
 2/25/2010") Physics Second Midterm Eam (AM) /5/00. (This problem is worth 40 points.) A roller coaster car of m travels around a vertical loop of radius R. There is no friction and no air resistance. At the top of
Physics Second Midterm Eam (AM) /5/00. (This problem is worth 40 points.) A roller coaster car of m travels around a vertical loop of radius R. There is no friction and no air resistance. At the top of
OCR Physics Specification A - H156/H556
 OCR Physics Specification A - H156/H556 Module 3: Forces and Motion You should be able to demonstrate and show your understanding of: 3.1 Motion Displacement, instantaneous speed, average speed, velocity
OCR Physics Specification A - H156/H556 Module 3: Forces and Motion You should be able to demonstrate and show your understanding of: 3.1 Motion Displacement, instantaneous speed, average speed, velocity
Bond Graphs. Peter Breedveld University of Twente, EWI/CE, P.O. Box 217, 7500 AE Enschede, Netherlands,
 Bond Graphs Peter Breedveld University of Twente, EWI/CE, P.O. Box 217, 7500 AE Enschede, Netherlands, p.c.breedveld@utwente.nl 1 Introduction The topic area that has become commonly known as bond graph
Bond Graphs Peter Breedveld University of Twente, EWI/CE, P.O. Box 217, 7500 AE Enschede, Netherlands, p.c.breedveld@utwente.nl 1 Introduction The topic area that has become commonly known as bond graph
ECEN 420 LINEAR CONTROL SYSTEMS. Lecture 6 Mathematical Representation of Physical Systems II 1/67
 1/67 ECEN 420 LINEAR CONTROL SYSTEMS Lecture 6 Mathematical Representation of Physical Systems II State Variable Models for Dynamic Systems u 1 u 2 u ṙ. Internal Variables x 1, x 2 x n y 1 y 2. y m Figure
1/67 ECEN 420 LINEAR CONTROL SYSTEMS Lecture 6 Mathematical Representation of Physical Systems II State Variable Models for Dynamic Systems u 1 u 2 u ṙ. Internal Variables x 1, x 2 x n y 1 y 2. y m Figure
Review: control, feedback, etc. Today s topic: state-space models of systems; linearization
 Plan of the Lecture Review: control, feedback, etc Today s topic: state-space models of systems; linearization Goal: a general framework that encompasses all examples of interest Once we have mastered
Plan of the Lecture Review: control, feedback, etc Today s topic: state-space models of systems; linearization Goal: a general framework that encompasses all examples of interest Once we have mastered
Modeling of Electromechanical Systems
 Page 1 of 54 Modeling of Electromechanical Systems Werner Haas, Kurt Schlacher and Reinhard Gahleitner Johannes Kepler University Linz, Department of Automatic Control, Altenbergerstr.69, A 4040 Linz,
Page 1 of 54 Modeling of Electromechanical Systems Werner Haas, Kurt Schlacher and Reinhard Gahleitner Johannes Kepler University Linz, Department of Automatic Control, Altenbergerstr.69, A 4040 Linz,
A MULTI-DOMAIN FUNCTIONAL DEPENDENCY MODELING TOOL BASED ON EXTENDED HYBRID BOND GRAPHS. Zsolt Lattmann. Thesis. Submitted to the Faculty of the
 A MULTI-DOMAIN FUNCTIONAL DEPENDENCY MODELING TOOL BASED ON EXTENDED HYBRID BOND GRAPHS By Zsolt Lattmann Thesis Submitted to the Faculty of the Graduate School of Vanderbilt University in partial fulfillment
A MULTI-DOMAIN FUNCTIONAL DEPENDENCY MODELING TOOL BASED ON EXTENDED HYBRID BOND GRAPHS By Zsolt Lattmann Thesis Submitted to the Faculty of the Graduate School of Vanderbilt University in partial fulfillment
Modeling for Designing. An essential Stage
 Modeling for Designing An essential Stage Geneviève Dauphin-Tanguy École Centrale de Lille E-mail : genevieve.dauphin-tanguy@ec-lille.fr Outline Introduction Bond Graph methodology Industrial applications
Modeling for Designing An essential Stage Geneviève Dauphin-Tanguy École Centrale de Lille E-mail : genevieve.dauphin-tanguy@ec-lille.fr Outline Introduction Bond Graph methodology Industrial applications
Physics Pre-comp diagnostic Answers
 Name Element Physics Pre-comp diagnostic Answers Grade 8 2017-2018 Instructions: THIS TEST IS NOT FOR A GRADE. It is to help you determine what you need to study for the precomps. Just do your best. Put
Name Element Physics Pre-comp diagnostic Answers Grade 8 2017-2018 Instructions: THIS TEST IS NOT FOR A GRADE. It is to help you determine what you need to study for the precomps. Just do your best. Put
AP Physics 1. Course Overview
 Radnor High School Course Syllabus AP Physics 1 Credits: Grade Weighting: Yes Prerequisites: Co-requisites: Length: Format: 1.0 Credit, weighted Honors chemistry or Advanced Chemistry Honors Pre-calculus
Radnor High School Course Syllabus AP Physics 1 Credits: Grade Weighting: Yes Prerequisites: Co-requisites: Length: Format: 1.0 Credit, weighted Honors chemistry or Advanced Chemistry Honors Pre-calculus
Topic: Force PHYSICS 231
 Topic: Force PHYSICS 231 Current Assignments Homework Set 2 due this Thursday, Jan 27, 11 pm Reading for next week: Chapters 10.1-6,10.10,8.3 2/1/11 Physics 231 Spring 2011 2 Key Concepts: Force Free body
Topic: Force PHYSICS 231 Current Assignments Homework Set 2 due this Thursday, Jan 27, 11 pm Reading for next week: Chapters 10.1-6,10.10,8.3 2/1/11 Physics 231 Spring 2011 2 Key Concepts: Force Free body
Chapter 6. Dynamics I: Motion Along a Line
 Chapter 6. Dynamics I: Motion Along a Line This chapter focuses on objects that move in a straight line, such as runners, bicycles, cars, planes, and rockets. Gravitational, tension, thrust, friction,
Chapter 6. Dynamics I: Motion Along a Line This chapter focuses on objects that move in a straight line, such as runners, bicycles, cars, planes, and rockets. Gravitational, tension, thrust, friction,
Chapter 14. Fluid Mechanics
 Chapter 14 Fluid Mechanics States of Matter Solid Has a definite volume and shape Liquid Has a definite volume but not a definite shape Gas unconfined Has neither a definite volume nor shape All of these
Chapter 14 Fluid Mechanics States of Matter Solid Has a definite volume and shape Liquid Has a definite volume but not a definite shape Gas unconfined Has neither a definite volume nor shape All of these
Physics For Scientists and Engineers A Strategic Approach 3 rd Edition, AP Edition, 2013 Knight
 For Scientists and Engineers A Strategic Approach 3 rd Edition, AP Edition, 2013 Knight To the Advanced Placement Topics for C *Advanced Placement, Advanced Placement Program, AP, and Pre-AP are registered
For Scientists and Engineers A Strategic Approach 3 rd Edition, AP Edition, 2013 Knight To the Advanced Placement Topics for C *Advanced Placement, Advanced Placement Program, AP, and Pre-AP are registered
Translational Mechanical Systems
 Translational Mechanical Systems Basic (Idealized) Modeling Elements Interconnection Relationships -Physical Laws Derive Equation of Motion (EOM) - SDOF Energy Transfer Series and Parallel Connections
Translational Mechanical Systems Basic (Idealized) Modeling Elements Interconnection Relationships -Physical Laws Derive Equation of Motion (EOM) - SDOF Energy Transfer Series and Parallel Connections
Modeling and Simulation Revision IV D R. T A R E K A. T U T U N J I P H I L A D E L P H I A U N I V E R S I T Y, J O R D A N
 Modeling and Simulation Revision IV D R. T A R E K A. T U T U N J I P H I L A D E L P H I A U N I V E R S I T Y, J O R D A N 2 0 1 7 Modeling Modeling is the process of representing the behavior of a real
Modeling and Simulation Revision IV D R. T A R E K A. T U T U N J I P H I L A D E L P H I A U N I V E R S I T Y, J O R D A N 2 0 1 7 Modeling Modeling is the process of representing the behavior of a real
DSC HW 3: Assigned 6/25/11, Due 7/2/12 Page 1
 DSC HW 3: Assigned 6/25/11, Due 7/2/12 Page 1 Problem 1 (Motor-Fan): A motor and fan are to be connected as shown in Figure 1. The torque-speed characteristics of the motor and fan are plotted on the same
DSC HW 3: Assigned 6/25/11, Due 7/2/12 Page 1 Problem 1 (Motor-Fan): A motor and fan are to be connected as shown in Figure 1. The torque-speed characteristics of the motor and fan are plotted on the same
2.004 Dynamics and Control II Spring 2008
 MIT OpenCourseWare http://ocwmitedu 00 Dynamics and Control II Spring 00 For information about citing these materials or our Terms of Use, visit: http://ocwmitedu/terms Massachusetts Institute of Technology
MIT OpenCourseWare http://ocwmitedu 00 Dynamics and Control II Spring 00 For information about citing these materials or our Terms of Use, visit: http://ocwmitedu/terms Massachusetts Institute of Technology
Mod. Sim. Dyn. Sys. Amplifiers page 1
 AMPLIFIERS A circuit containing only capacitors, amplifiers (transistors) and resistors may resonate. A circuit containing only capacitors and resistors may not. Why does amplification permit resonance
AMPLIFIERS A circuit containing only capacitors, amplifiers (transistors) and resistors may resonate. A circuit containing only capacitors and resistors may not. Why does amplification permit resonance
Modeling and Experimentation: Compound Pendulum
 Modeling and Experimentation: Compound Pendulum Prof. R.G. Longoria Department of Mechanical Engineering The University of Texas at Austin Fall 2014 Overview This lab focuses on developing a mathematical
Modeling and Experimentation: Compound Pendulum Prof. R.G. Longoria Department of Mechanical Engineering The University of Texas at Austin Fall 2014 Overview This lab focuses on developing a mathematical
PHYSICS I RESOURCE SHEET
 PHYSICS I RESOURCE SHEET Cautions and Notes Kinematic Equations These are to be used in regions with constant acceleration only You must keep regions with different accelerations separate (for example,
PHYSICS I RESOURCE SHEET Cautions and Notes Kinematic Equations These are to be used in regions with constant acceleration only You must keep regions with different accelerations separate (for example,
POG Modeling of Automotive Systems
 POG Modeling of Automotive Systems MORE on Automotive - 28 Maggio 2018 Prof. Roberto Zanasi Graphical Modeling Techniques Graphical Techniques for representing the dynamics of physical systems: 1) Bond-Graph
POG Modeling of Automotive Systems MORE on Automotive - 28 Maggio 2018 Prof. Roberto Zanasi Graphical Modeling Techniques Graphical Techniques for representing the dynamics of physical systems: 1) Bond-Graph
The... of a particle is defined as its change in position in some time interval.
 Distance is the. of a path followed by a particle. Distance is a quantity. The... of a particle is defined as its change in position in some time interval. Displacement is a.. quantity. The... of a particle
Distance is the. of a path followed by a particle. Distance is a quantity. The... of a particle is defined as its change in position in some time interval. Displacement is a.. quantity. The... of a particle
Mod. Sim. Dyn. Sys. Amplifiers page 1
 AMPLIFIERS A circuit containing only capacitors, amplifiers (transistors) and resistors may resonate. A circuit containing only capacitors and resistors may not. Why does amplification permit resonance
AMPLIFIERS A circuit containing only capacitors, amplifiers (transistors) and resistors may resonate. A circuit containing only capacitors and resistors may not. Why does amplification permit resonance
Ch 3.7: Mechanical & Electrical Vibrations
 Ch 3.7: Mechanical & Electrical Vibrations Two important areas of application for second order linear equations with constant coefficients are in modeling mechanical and electrical oscillations. We will
Ch 3.7: Mechanical & Electrical Vibrations Two important areas of application for second order linear equations with constant coefficients are in modeling mechanical and electrical oscillations. We will
EF 152 Physics for Engineers II
 EF 152 Physics for Engineers II Prof. Will Schleter Prof. Amy Biegalski http://ef.engr.utk.edu/ef152 Physics I Review: Physics II Preview: Vectors, Ratios, Estimation, 1D, 2D Motion Projectile Motion,
EF 152 Physics for Engineers II Prof. Will Schleter Prof. Amy Biegalski http://ef.engr.utk.edu/ef152 Physics I Review: Physics II Preview: Vectors, Ratios, Estimation, 1D, 2D Motion Projectile Motion,
SOLUTIONS Aug 2016 exam TFY4102
 SOLUTIONS Aug 2016 exam TFY4102 1) In a perfectly ELASTIC collision between two perfectly rigid objects A) the momentum of each object is conserved. B) the kinetic energy of each object is conserved. C)
SOLUTIONS Aug 2016 exam TFY4102 1) In a perfectly ELASTIC collision between two perfectly rigid objects A) the momentum of each object is conserved. B) the kinetic energy of each object is conserved. C)
Here are some internet links to instructional and necessary background materials:
 The general areas covered by the University Physics course are subdivided into major categories. For each category, answer the conceptual questions in the form of a short paragraph. Although fewer topics
The general areas covered by the University Physics course are subdivided into major categories. For each category, answer the conceptual questions in the form of a short paragraph. Although fewer topics
Modeling and Simulation Revision III D R. T A R E K A. T U T U N J I P H I L A D E L P H I A U N I V E R S I T Y, J O R D A N
 Modeling and Simulation Revision III D R. T A R E K A. T U T U N J I P H I L A D E L P H I A U N I V E R S I T Y, J O R D A N 0 1 4 Block Diagrams Block diagram models consist of two fundamental objects:
Modeling and Simulation Revision III D R. T A R E K A. T U T U N J I P H I L A D E L P H I A U N I V E R S I T Y, J O R D A N 0 1 4 Block Diagrams Block diagram models consist of two fundamental objects:
Modeling, Identification and Control of Aerospace Systems. Luiz Carlos S. Góes and Euler G. Barbosa Instituto Tecnológico de Aeronáutica DCTA
 Modeling, Identification and Control of Aerospace Systems Luiz Carlos S. Góes and Euler G. Barbosa Instituto Tecnológico de Aeronáutica DCTA Presentation Outline Electrohydraulic Control of a Flexible
Modeling, Identification and Control of Aerospace Systems Luiz Carlos S. Góes and Euler G. Barbosa Instituto Tecnológico de Aeronáutica DCTA Presentation Outline Electrohydraulic Control of a Flexible
2.004 Dynamics and Control II Spring 2008
 MT OpenCourseWare http://ocwmitedu 200 Dynamics and Control Spring 200 For information about citing these materials or our Terms of Use, visit: http://ocwmitedu/terms Massachusetts nstitute of Technology
MT OpenCourseWare http://ocwmitedu 200 Dynamics and Control Spring 200 For information about citing these materials or our Terms of Use, visit: http://ocwmitedu/terms Massachusetts nstitute of Technology
Chapter 4. Forces and Newton s Laws of Motion. continued
 Chapter 4 Forces and Newton s Laws of Motion continued Quiz 3 4.7 The Gravitational Force Newton s Law of Universal Gravitation Every particle in the universe exerts an attractive force on every other
Chapter 4 Forces and Newton s Laws of Motion continued Quiz 3 4.7 The Gravitational Force Newton s Law of Universal Gravitation Every particle in the universe exerts an attractive force on every other
NETWORK MODELING OF PHYSICAL SYSTEM DYNAMICS
 NETWORK MODELING OF PHYSICAL SYSTEM DYNAMICS a.k.a. lumped parameter modeling Discussion GOAL: Systematic approach to synthesizing multi-domain physical system models MODEL TYPES: Purpose of the model
NETWORK MODELING OF PHYSICAL SYSTEM DYNAMICS a.k.a. lumped parameter modeling Discussion GOAL: Systematic approach to synthesizing multi-domain physical system models MODEL TYPES: Purpose of the model
Midterm #1 Solutions
 Midterm #1 Solutions Physics 1501, Spring 2014 here are often many ways to arrive at an answer. For some conceptual problems, it happens through the intuition we have gained since birth about how the natural
Midterm #1 Solutions Physics 1501, Spring 2014 here are often many ways to arrive at an answer. For some conceptual problems, it happens through the intuition we have gained since birth about how the natural
AP Physics 1: Algebra-Based
 018 AP Physics 1: Algebra-Based Scoring Guidelines College Board, Advanced Placement Program, AP, AP Central, and the acorn logo are registered trademarks of the College Board. AP Central is the official
018 AP Physics 1: Algebra-Based Scoring Guidelines College Board, Advanced Placement Program, AP, AP Central, and the acorn logo are registered trademarks of the College Board. AP Central is the official
PHYSICS 221, FALL 2011 EXAM #2 SOLUTIONS WEDNESDAY, NOVEMBER 2, 2011
 PHYSICS 1, FALL 011 EXAM SOLUTIONS WEDNESDAY, NOVEMBER, 011 Note: The unit vectors in the +x, +y, and +z directions of a right-handed Cartesian coordinate system are î, ĵ, and ˆk, respectively. In this
PHYSICS 1, FALL 011 EXAM SOLUTIONS WEDNESDAY, NOVEMBER, 011 Note: The unit vectors in the +x, +y, and +z directions of a right-handed Cartesian coordinate system are î, ĵ, and ˆk, respectively. In this
Summary of changes (certificate to new GCSE)
") Summary of changes (certificate to new GCSE) This resource outlines the main changes that have been made to the assessment and subject content from our current Level 1/2 Certificate in Physics to the new
Summary of changes (certificate to new GCSE) This resource outlines the main changes that have been made to the assessment and subject content from our current Level 1/2 Certificate in Physics to the new
General Physics I Spring Forces and Newton s Laws of Motion
 General Physics I Spring 2011 Forces and Newton s Laws of Motion 1 Forces and Interactions The central concept in understanding why things move is force. If a tractor pushes or pulls a trailer, the tractor
General Physics I Spring 2011 Forces and Newton s Laws of Motion 1 Forces and Interactions The central concept in understanding why things move is force. If a tractor pushes or pulls a trailer, the tractor
Physics for Scientists and Engineers 4th Edition, 2017
 A Correlation of Physics for Scientists and Engineers 4th Edition, 2017 To the AP Physics C: Mechanics Course Descriptions AP is a trademark registered and/or owned by the College Board, which was not
A Correlation of Physics for Scientists and Engineers 4th Edition, 2017 To the AP Physics C: Mechanics Course Descriptions AP is a trademark registered and/or owned by the College Board, which was not
PHYSICS. Course Structure. Unit Topics Marks. Physical World and Measurement. 1 Physical World. 2 Units and Measurements.
 PHYSICS Course Structure Unit Topics Marks I Physical World and Measurement 1 Physical World 2 Units and Measurements II Kinematics 3 Motion in a Straight Line 23 4 Motion in a Plane III Laws of Motion
PHYSICS Course Structure Unit Topics Marks I Physical World and Measurement 1 Physical World 2 Units and Measurements II Kinematics 3 Motion in a Straight Line 23 4 Motion in a Plane III Laws of Motion
Dynamics: Forces. Lecture 7. Chapter 5. Course website:
 Lecture 7 Chapter 5 Dynamics: Forces Course website: http://faculty.uml.edu/andriy_danylov/teaching/physicsi Today we are going to discuss: Chapter 5: Some leftovers from rotational motion Ch.4 Force,
Lecture 7 Chapter 5 Dynamics: Forces Course website: http://faculty.uml.edu/andriy_danylov/teaching/physicsi Today we are going to discuss: Chapter 5: Some leftovers from rotational motion Ch.4 Force,
PLANAR KINETIC EQUATIONS OF MOTION (Section 17.2)
") PLANAR KINETIC EQUATIONS OF MOTION (Section 17.2) We will limit our study of planar kinetics to rigid bodies that are symmetric with respect to a fixed reference plane. As discussed in Chapter 16, when
PLANAR KINETIC EQUATIONS OF MOTION (Section 17.2) We will limit our study of planar kinetics to rigid bodies that are symmetric with respect to a fixed reference plane. As discussed in Chapter 16, when
Work and Energy Definition of work Examples. Definition of Mechanical Energy. Conservation of Mechanical Energy, Pg 1
 Work and Energy Definition of work Examples Work and Energy Today s Agenda Definition of Mechanical Energy Conservation of Mechanical Energy Conservative forces Conservation of Mechanical Energy, Pg 1
Work and Energy Definition of work Examples Work and Energy Today s Agenda Definition of Mechanical Energy Conservation of Mechanical Energy Conservative forces Conservation of Mechanical Energy, Pg 1
Lecture 5. Labs this week:
 Labs this week: Lab 10: Bleed-off Circuit Lecture 5 Lab 11/12: Asynchronous/Synchronous and Parallel/Tandem Operations Systems Review Homework (due 10/11) Participation is research lab Hydraulic Hybrid
Labs this week: Lab 10: Bleed-off Circuit Lecture 5 Lab 11/12: Asynchronous/Synchronous and Parallel/Tandem Operations Systems Review Homework (due 10/11) Participation is research lab Hydraulic Hybrid
Wiley Plus. Final Assignment (5) Is Due Today: Before 11 pm!
 Is Due Today: Before 11 pm!") Wiley Plus Final Assignment (5) Is Due Today: Before 11 pm! Final Exam Review December 9, 009 3 What about vector subtraction? Suppose you are given the vector relation A B C RULE: The resultant vector
Wiley Plus Final Assignment (5) Is Due Today: Before 11 pm! Final Exam Review December 9, 009 3 What about vector subtraction? Suppose you are given the vector relation A B C RULE: The resultant vector
Video 2.1a Vijay Kumar and Ani Hsieh
 Video 2.1a Vijay Kumar and Ani Hsieh Robo3x-1.3 1 Introduction to Lagrangian Mechanics Vijay Kumar and Ani Hsieh University of Pennsylvania Robo3x-1.3 2 Analytical Mechanics Aristotle Galileo Bernoulli
Video 2.1a Vijay Kumar and Ani Hsieh Robo3x-1.3 1 Introduction to Lagrangian Mechanics Vijay Kumar and Ani Hsieh University of Pennsylvania Robo3x-1.3 2 Analytical Mechanics Aristotle Galileo Bernoulli
AP Physics C Syllabus
 Course Overview AP Physics C Syllabus AP Physics C will meet for 90 minutes on block scheduling and for 45 minutes on regular scheduling. Class activities will include lecture, demonstration, problem solving
Course Overview AP Physics C Syllabus AP Physics C will meet for 90 minutes on block scheduling and for 45 minutes on regular scheduling. Class activities will include lecture, demonstration, problem solving
Lecture Fluid system elements
 Lecture 8.1 Fluid system elements volumetric flowrate pressure drop Detailed distributed models of fluids, such as the Navier-Stokes equations, are necessary for understanding many aspects of fluid systems
Lecture 8.1 Fluid system elements volumetric flowrate pressure drop Detailed distributed models of fluids, such as the Navier-Stokes equations, are necessary for understanding many aspects of fluid systems
GCSE PHYSICS REVISION LIST
 GCSE PHYSICS REVISION LIST OCR Gateway Physics (J249) from 2016 Topic P1: Matter P1.1 Describe how and why the atomic model has changed over time Describe the structure of the atom and discuss the charges
GCSE PHYSICS REVISION LIST OCR Gateway Physics (J249) from 2016 Topic P1: Matter P1.1 Describe how and why the atomic model has changed over time Describe the structure of the atom and discuss the charges
Feedback Basics. David M. Auslander Mechanical Engineering University of California at Berkeley. copyright 1998, D.M. Auslander
 Feedback Basics David M. Auslander Mechanical Engineering University of California at Berkeley copyright 1998, D.M. Auslander 1 I. Feedback Control Context 2 What is Feedback Control? Measure desired behavior
Feedback Basics David M. Auslander Mechanical Engineering University of California at Berkeley copyright 1998, D.M. Auslander 1 I. Feedback Control Context 2 What is Feedback Control? Measure desired behavior
2002 HKAL Physics MC Suggested Solution 1. Before the cord is cut, tension in the cord, T c = 2 mg, tension in the spring, T s = mg
 00 HKAL Physics MC Suggested Solution 1. Before the cord is cut, tension in the cord, T c = mg, tension in the spring, T s = mg Just after the cord is cut, Net force acting on X = mg +T s = mg, so the
00 HKAL Physics MC Suggested Solution 1. Before the cord is cut, tension in the cord, T c = mg, tension in the spring, T s = mg Just after the cord is cut, Net force acting on X = mg +T s = mg, so the
Q1. Which of the following is the correct combination of dimensions for energy?
 Tuesday, June 15, 2010 Page: 1 Q1. Which of the following is the correct combination of dimensions for energy? A) ML 2 /T 2 B) LT 2 /M C) MLT D) M 2 L 3 T E) ML/T 2 Q2. Two cars are initially 150 kilometers
Tuesday, June 15, 2010 Page: 1 Q1. Which of the following is the correct combination of dimensions for energy? A) ML 2 /T 2 B) LT 2 /M C) MLT D) M 2 L 3 T E) ML/T 2 Q2. Two cars are initially 150 kilometers
Study Guide for Physics 1100 Final Exam
 Study Guide for Physics 1100 Final Exam Dr. Fazzini s Physics 1100 Final Exam will take place on Wednesday, May 16 th, 2018 from 9:00AM-10:50AM in Room BIC-3535. Click on the Detailed Class Information
Study Guide for Physics 1100 Final Exam Dr. Fazzini s Physics 1100 Final Exam will take place on Wednesday, May 16 th, 2018 from 9:00AM-10:50AM in Room BIC-3535. Click on the Detailed Class Information
School of Engineering Faculty of Built Environment, Engineering, Technology & Design
 Module Name and Code : ENG60803 Real Time Instrumentation Semester and Year : Semester 5/6, Year 3 Lecture Number/ Week : Lecture 3, Week 3 Learning Outcome (s) : LO5 Module Co-ordinator/Tutor : Dr. Phang
Module Name and Code : ENG60803 Real Time Instrumentation Semester and Year : Semester 5/6, Year 3 Lecture Number/ Week : Lecture 3, Week 3 Learning Outcome (s) : LO5 Module Co-ordinator/Tutor : Dr. Phang
Dynamics: Forces and Newton s Laws of Motion
 Lecture 7 Chapter 5 Physics I Dynamics: Forces and Newton s Laws of Motion Course website: http://faculty.uml.edu/andriy_danylov/teaching/physicsi Today we are going to discuss: Chapter 5: Force, Mass:
Lecture 7 Chapter 5 Physics I Dynamics: Forces and Newton s Laws of Motion Course website: http://faculty.uml.edu/andriy_danylov/teaching/physicsi Today we are going to discuss: Chapter 5: Force, Mass:
Northwestern Connecticut Community College Course Syllabus
 Northwestern Connecticut Community College Course Syllabus Course Title: Introductory Physics Course #: PHY 110 Course Description: 4 credits (3 class hours and 3 laboratory hours per week) Physics 110
Northwestern Connecticut Community College Course Syllabus Course Title: Introductory Physics Course #: PHY 110 Course Description: 4 credits (3 class hours and 3 laboratory hours per week) Physics 110
Grade Level: 10,11,12. Course Overview:
 Course:Advanced Placement Physics 1 Content Area: Science Grade Level: 10,11,12 Course Overview: AP Physics 1: Algebra-based is part one of a two-year sequence equivalent to the first and second semesters
Course:Advanced Placement Physics 1 Content Area: Science Grade Level: 10,11,12 Course Overview: AP Physics 1: Algebra-based is part one of a two-year sequence equivalent to the first and second semesters
ENGI9496 Lecture Notes State-Space Equation Generation
 ENGI9496 Lecture Notes State-Space Equation Generation. State Equations and Variables - Definitions The end goal of model formulation is to simulate a system s behaviour on a computer. A set of coherent
ENGI9496 Lecture Notes State-Space Equation Generation. State Equations and Variables - Definitions The end goal of model formulation is to simulate a system s behaviour on a computer. A set of coherent
PHYS 1114, Lecture 33, April 10 Contents:
 PHYS 1114, Lecture 33, April 10 Contents: 1 This class is o cially cancelled, and has been replaced by the common exam Tuesday, April 11, 5:30 PM. A review and Q&A session is scheduled instead during class
PHYS 1114, Lecture 33, April 10 Contents: 1 This class is o cially cancelled, and has been replaced by the common exam Tuesday, April 11, 5:30 PM. A review and Q&A session is scheduled instead during class
Chapter 14 Potential Energy and Conservation of Energy
 Chapter 4 Potential Energy and Conservation of Energy Chapter 4 Potential Energy and Conservation of Energy... 2 4. Conservation of Energy... 2 4.2 Conservative and Non-Conservative Forces... 3 4.3 Changes
Chapter 4 Potential Energy and Conservation of Energy Chapter 4 Potential Energy and Conservation of Energy... 2 4. Conservation of Energy... 2 4.2 Conservative and Non-Conservative Forces... 3 4.3 Changes
07/13/07 Name, Roster # Physics 152 Midterm 1
 The figure to the right showing two positive point charges pertains to questions 1-3 1. If q1 and q2 are the same amount of charge, which arrow best represents the direction of the net electric field at
The figure to the right showing two positive point charges pertains to questions 1-3 1. If q1 and q2 are the same amount of charge, which arrow best represents the direction of the net electric field at
Figure 1 Answer: = m
 Q1. Figure 1 shows a solid cylindrical steel rod of length =.0 m and diameter D =.0 cm. What will be increase in its length when m = 80 kg block is attached to its bottom end? (Young's modulus of steel
Q1. Figure 1 shows a solid cylindrical steel rod of length =.0 m and diameter D =.0 cm. What will be increase in its length when m = 80 kg block is attached to its bottom end? (Young's modulus of steel
Personalised Learning Checklists AQA Physics Paper 2
 6.5.1 Forces and their interactions 6.5.2 Work done and energy transfer AQA TRILOGY Physics (8464) from 2016 Topics T6.5. Forces Topic Student Checklist R A G Identify and describe scalar quantities and
6.5.1 Forces and their interactions 6.5.2 Work done and energy transfer AQA TRILOGY Physics (8464) from 2016 Topics T6.5. Forces Topic Student Checklist R A G Identify and describe scalar quantities and
Course Name: AP Physics. Team Names: Jon Collins. Velocity Acceleration Displacement
 Course Name: AP Physics Team Names: Jon Collins 1 st 9 weeks Objectives Vocabulary 1. NEWTONIAN MECHANICS and lab skills: Kinematics (including vectors, vector algebra, components of vectors, coordinate
Course Name: AP Physics Team Names: Jon Collins 1 st 9 weeks Objectives Vocabulary 1. NEWTONIAN MECHANICS and lab skills: Kinematics (including vectors, vector algebra, components of vectors, coordinate
AN INTRODUCTION TO LAGRANGE EQUATIONS. Professor J. Kim Vandiver October 28, 2016
 AN INTRODUCTION TO LAGRANGE EQUATIONS Professor J. Kim Vandiver October 28, 2016 kimv@mit.edu 1.0 INTRODUCTION This paper is intended as a minimal introduction to the application of Lagrange equations
AN INTRODUCTION TO LAGRANGE EQUATIONS Professor J. Kim Vandiver October 28, 2016 kimv@mit.edu 1.0 INTRODUCTION This paper is intended as a minimal introduction to the application of Lagrange equations
Physics 1. and graphical representations. Express the motion of an object using narrative, mathematical,
 Theme Strand Topics Physics The Marriage of Motion and Energy Kinematics Motion in one direction Motion in two directions Content Statement Learning Targets: I can describe the similarities and differences
Theme Strand Topics Physics The Marriage of Motion and Energy Kinematics Motion in one direction Motion in two directions Content Statement Learning Targets: I can describe the similarities and differences
Linear Transport Relations (LTR)
") Linear Transport Relations (LTR) Much of Transport Phenomena deals with the exchange of momentum, mass, or heat between two (or many) objects. Often, the most mathematically simple way to consider how
Linear Transport Relations (LTR) Much of Transport Phenomena deals with the exchange of momentum, mass, or heat between two (or many) objects. Often, the most mathematically simple way to consider how
AP Physics Electromagnetic Wrap Up
 AP Physics Electromagnetic Wrap Up Here are the glorious equations for this wonderful section. This is the equation for the magnetic force acting on a moving charged particle in a magnetic field. The angle
AP Physics Electromagnetic Wrap Up Here are the glorious equations for this wonderful section. This is the equation for the magnetic force acting on a moving charged particle in a magnetic field. The angle
Physics Waves & Oscillations. Mechanics Lesson: Circular Motion. Mechanics Lesson: Circular Motion 1/18/2016. Spring 2016 Semester Matthew Jones
 Physics 42200 Waves & Oscillations Lecture 5 French, Chapter 3 Spring 2016 Semester Matthew Jones Mechanics Lesson: Circular Motion Linear motion: Mass: Position: Velocity: / Momentum: Acceleration: /
Physics 42200 Waves & Oscillations Lecture 5 French, Chapter 3 Spring 2016 Semester Matthew Jones Mechanics Lesson: Circular Motion Linear motion: Mass: Position: Velocity: / Momentum: Acceleration: /
Physics I. Unit 1 Methods in Science (Systems of Units) Competencies (Do) Students should be able to demonstrate scientific methods.
 Competencies (Do) Students should be able to demonstrate scientific methods.") Physics I Unit 1 Methods in Science (Systems of Units) Estimated Time Frame Big Ideas for Units 10 Days Tools are needed for the study of Physics, such as measurement, conversions, significant figures,
Physics I Unit 1 Methods in Science (Systems of Units) Estimated Time Frame Big Ideas for Units 10 Days Tools are needed for the study of Physics, such as measurement, conversions, significant figures,
EQUIVALENT SINGLE-DEGREE-OF-FREEDOM SYSTEM AND FREE VIBRATION
 1 EQUIVALENT SINGLE-DEGREE-OF-FREEDOM SYSTEM AND FREE VIBRATION The course on Mechanical Vibration is an important part of the Mechanical Engineering undergraduate curriculum. It is necessary for the development
1 EQUIVALENT SINGLE-DEGREE-OF-FREEDOM SYSTEM AND FREE VIBRATION The course on Mechanical Vibration is an important part of the Mechanical Engineering undergraduate curriculum. It is necessary for the development
4) Vector = and vector = What is vector = +? A) B) C) D) E)
 Vector = and vector = What is vector = +? A) B) C) D) E)") 1) Suppose that an object is moving with constant nonzero acceleration. Which of the following is an accurate statement concerning its motion? A) In equal times its speed changes by equal amounts. B) In
1) Suppose that an object is moving with constant nonzero acceleration. Which of the following is an accurate statement concerning its motion? A) In equal times its speed changes by equal amounts. B) In
A Correlation of Pearson Physics 2014
 A Correlation of Pearson Physics Ohio s New Learning Standards for Science, 2011 Physics, High School Science Inquiry and Application Course Content A Correlation of, INTRODUCTION This document demonstrates
A Correlation of Pearson Physics Ohio s New Learning Standards for Science, 2011 Physics, High School Science Inquiry and Application Course Content A Correlation of, INTRODUCTION This document demonstrates
Lecture Outline Chapter 6. Physics, 4 th Edition James S. Walker. Copyright 2010 Pearson Education, Inc.
 Lecture Outline Chapter 6 Physics, 4 th Edition James S. Walker Chapter 6 Applications of Newton s Laws Units of Chapter 6 Frictional Forces Strings and Springs Translational Equilibrium Connected Objects
Lecture Outline Chapter 6 Physics, 4 th Edition James S. Walker Chapter 6 Applications of Newton s Laws Units of Chapter 6 Frictional Forces Strings and Springs Translational Equilibrium Connected Objects
Conservation of mechanical energy *
 OpenStax-CNX module: m15102 1 Conservation of mechanical energy * Sunil Kumar Singh This work is produced by OpenStax-CNX and licensed under the Creative Commons Attribution License 2.0 Abstract When only
OpenStax-CNX module: m15102 1 Conservation of mechanical energy * Sunil Kumar Singh This work is produced by OpenStax-CNX and licensed under the Creative Commons Attribution License 2.0 Abstract When only
TOPIC LEARNING OUTCOMES REMARKS HOUR
 .0 PHYSICAL QUANTITIES AND MEASUREMENTS At the end of this topic, students should be able to: 5. Physical Quantities and Units a) List out the basic quantities and their respective SI units: length (m),
.0 PHYSICAL QUANTITIES AND MEASUREMENTS At the end of this topic, students should be able to: 5. Physical Quantities and Units a) List out the basic quantities and their respective SI units: length (m),
REGLERTEKNIK AUTOMATIC CONTROL LINKÖPING
 Generating state space equations from a bond graph with dependent storage elements using singular perturbation theory. Krister Edstrom Department of Electrical Engineering Linkoping University, S-58 83
Generating state space equations from a bond graph with dependent storage elements using singular perturbation theory. Krister Edstrom Department of Electrical Engineering Linkoping University, S-58 83
Dynamics: Forces and Newton s Laws of Motion
 Lecture 7 Chapter 5 Dynamics: Forces and Newton s Laws of Motion Course website: http://faculty.uml.edu/andriy_danylov/teaching/physicsi Today we are going to discuss: Chapter 5: Force, Mass: Section 5.1
Lecture 7 Chapter 5 Dynamics: Forces and Newton s Laws of Motion Course website: http://faculty.uml.edu/andriy_danylov/teaching/physicsi Today we are going to discuss: Chapter 5: Force, Mass: Section 5.1
Practice. Newton s 3 Laws of Motion. Recall. Forces a push or pull acting on an object; a vector quantity measured in Newtons (kg m/s²)
") Practice A car starts from rest and travels upwards along a straight road inclined at an angle of 5 from the horizontal. The length of the road is 450 m and the mass of the car is 800 kg. The speed of
Practice A car starts from rest and travels upwards along a straight road inclined at an angle of 5 from the horizontal. The length of the road is 450 m and the mass of the car is 800 kg. The speed of
Modeling and Simulation for Automatic Control
 Modeling and Simulation for Automatic Control Olav Egeland and Jan Tommy Gravdahl Norwegian University of Science and Technology Trondheim, Norway MARINE CYBERNETICS Г~Т.! " " http://www.mannecybemetics.com
Modeling and Simulation for Automatic Control Olav Egeland and Jan Tommy Gravdahl Norwegian University of Science and Technology Trondheim, Norway MARINE CYBERNETICS Г~Т.! " " http://www.mannecybemetics.com
Curriculum Map-- Kings School District Honors Physics
 Curriculum Map-- Kings School District Honors Physics Big ideas Essential Questions Content Skills/Standards Assessment + Criteria Activities/Resources Motion of an object can be described by its position,
Curriculum Map-- Kings School District Honors Physics Big ideas Essential Questions Content Skills/Standards Assessment + Criteria Activities/Resources Motion of an object can be described by its position,
LANMARK UNIVERSITY OMU-ARAN, KWARA STATE DEPARTMENT OF MECHANICAL ENGINEERING COURSE: MECHANICS OF MACHINE (MCE 322). LECTURER: ENGR.
. LECTURER: ENGR.") LANMARK UNIVERSITY OMU-ARAN, KWARA STATE DEPARTMENT OF MECHANICAL ENGINEERING COURSE: MECHANICS OF MACHINE (MCE 322). LECTURER: ENGR. IBIKUNLE ROTIMI ADEDAYO SIMPLE HARMONIC MOTION. Introduction Consider
LANMARK UNIVERSITY OMU-ARAN, KWARA STATE DEPARTMENT OF MECHANICAL ENGINEERING COURSE: MECHANICS OF MACHINE (MCE 322). LECTURER: ENGR. IBIKUNLE ROTIMI ADEDAYO SIMPLE HARMONIC MOTION. Introduction Consider
AP Physics C: Mechanics and Electricity & Magnetism
 AP Physics C: Mechanics and Electricity & Magnetism Textbook: Giancoli, D. (2000). Physics for Scientists & Engineers Third Edition. Prentice Hall: Upper Saddle River, NJ. AP Physics C is a second year
AP Physics C: Mechanics and Electricity & Magnetism Textbook: Giancoli, D. (2000). Physics for Scientists & Engineers Third Edition. Prentice Hall: Upper Saddle River, NJ. AP Physics C is a second year