ANALYSIS AND SYNTHESIS OF DISTURBANCE OBSERVER AS AN ADD-ON ROBUST CONTROLLER
|
|
|
- William Gilmore
- 5 years ago
- Views:
Transcription
1 ANALYSIS AND SYNTHESIS OF DISTURBANCE OBSERVER AS AN ADD-ON ROBUST CONTROLLER Hyungbo Shim (School of Electrical Engineering, Seoul National University, Korea) in collaboration with Juhoon Back, Nam Hoon Jo, and Youngjun Joo under the support from Hyundai Heavy Industries, Co., LTD. Oct. 15, 2010, at UCSB
2 Overview disturbance observer (DOB) dates back to the Japanese article (K. Ohnishi, 1987) has been of much interest in control application community, but did not draw much attention in control theory community 41 pub. record in IEEE Trans. Indus. Elec. ( ) 8 in IEEE Trans. Contr. Sys. Tech. ( ) 3 in IEEE Trans. Automat. Contr. ( ) original idea is intuitively simple, but less analyzed rigorously This talk is about developing theoretical framework for DOB approach, and appreciation of it as a robust control tool presentation of robust stability condition and robust nominal performance recovery discussion about various aspects of DOB, and extension to nonlinear systems 2


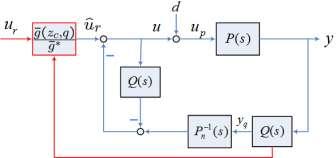
3 Overview problem statement 3 Inner-loop dynamic controller: The same input-output behavior!
4 Overview problem statement 4 The same input-output behavior! not only just the same steady-state behavior, but also the same transient behavior (with the same IC between the nominal and the real) important feature required by industry where settling time, overshoot, etc., should be uniform among many product units a sharp contrast to other robust or adaptive redesign approach which possibly changes the transient behavior
5 Linear DOB: Intuition 5
6 Linear DOB: Intuition 6

7 Linear DOB: Intuitive justification 7
8 More Issues to be Solved 8 The argument so far does not present real power and limitations. robust stability is still of question what about transient performance recovery? unanswered observations from practice : It does not work for non-minimum phase plant. High bandwidth of Q(s) destabilizes the closed-loop. It cannot handle large parameter variation. Higher order Q(s) leads to instability. can we extend the DOB-based controller for uncertain nonlinear plants?

9 Our Starting Point 9
 10 Byrnes-Isidori Normal")
10 Normal form realization of Q(s) 10 Byrnes-Isidori Normal Form


11 Representation of P (nonlinear plant) 11 Byrnes-Isidori Normal Form
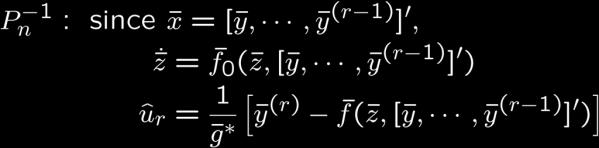
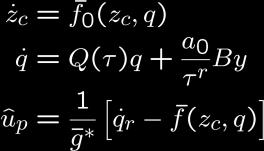

12 Representation of nominal plant Pn (with Q) 12

13 Summary: Problem Statement 13 State-space realization of DOB structure?
14 * (too brief) Review of Tikhonov s Theorem 14

15 Closed-loop system in the Standard Singular Perturbation Form 15 With coordinate change given by the overall closed-loop system is expressed by outer-loop controller C Robust stability of DOB structure with small = Robust stability of Boundary-Layer subsystem + Robust stability of Quasi-Steady-State subsystem

.")
16 Quasi-Steady-State Subsystem 16 QSS subsystem: It is the same as the disturbance-free nominal closed-loop! z-dynamics becomes unobservable. z-dynamics should be ISS (minimum phase in linear case). implies (so Q-filter with the plant inverse acts as a state observer!)


17 Boundary-Layer Subsystem 17 Robust stability condition: Q-filter should be stable. No matter how large the uncertainty is, once bounded, there are s so that two polynomials are Hurwitz! proof Semi-global result for boundedness of
18 Summary: Robust Stability 18 Robust stability of the closed-loop with DOB is guaranteed if, on a compact set of the state-space, 1. zero dynamics of uncertain plant is ISS, 2. outer-loop controller stabilizes the nominal plant, 3. coefficients of Q-filter are chosen for the RS condition, 4. is sufficiently small.



")
19 Robust Steady-State Performance 19 Nominal closed-loop nominal plant outer-loop controller C (slow) transient steady-state Real closed-loop (fast) transient (slow) transient steady-state
20 Robust (slow) Transient Performance 20 I. Tikhonov s theorem guarantees that if II. However, (0) and»(0) become unbounded as! 0.

21 Peaking phenomenon reflected in coordinate change 21
 and»(0) become unbounded as! 0.")
22 Robust (slow) Transient Performance 22 I. Tikhonov s theorem guarantees that if II. However, (0) and»(0) become unbounded as! 0. Lesson: Due to peaking phenomenon, it is not true that conventional DOB recovers (slow) transient performance.
23 Saturating the Peaking Components Peaking components that affect slow dynamics: 23 [Esfandiari & Khalil, 1992] Replace with and

24 Stability Loss in BL Subsystem and its recovery by a dead-zone function 24 BL -dynamics becomes and loses GES. Add a dead-zone function: to recover GES.

25 Stability Analysis of BL Subsystem with saturation & deadzone 25
26 Application of Tikhonov s Theorem for the second interval 26

27 Summary: Robust Transient Performance Recovery 27 thanks to saturation & dead-zone functions.



28 Proposed Nonlinear DOB Structure 28 [Back/S, AUT, 08]
29 Example: Point Mass Satellite 29 [Back/S, TAC, 09]
30 Example: Point Mass Satellite 30 Nominal: Real: with DOB (solid=nominal) Real: w/o DOB:
31 31 Robust Stability Condition for Linear DOB back to linear presents simple linear robust stability condition working on frequency domain Shim & Jo, AUT, 2009
32 Problem Formulation 32 Standing Assumption: where is a collection of Ass: C(s) is designed for Pn(s). Problem: Design of Q(s) for robust stability
 l+r + a l+r 1 ( s) l+r 1 + + a 1 ( s) + a 0 =: N Q(s; ) D Q (s; ) ; >")
33 Characteristic equation with Q(s) 33 Q(s) = ( s) l + b l 1 ( s) l b 1 ( s) + a 0 ( s) l+r + a l+r 1 ( s) l+r a 1 ( s) + a 0 =: N Q(s; ) D Q (s; ) ; > 0
34 Robust Stability of the Overall System 34 [S/Jo, AUT, 09] Observation 1: Observation 2:
 = a 0 ( s) r + a")

35 Design of Q(s): when Q(s) = a 0 ( s) r + a r 1 ( s) r a 0 35 How to choose Q(s):
36 Discussion: Answers to the raised questions It does not work for non-minimum phase plant. Correct, for small. 2. Small destabilizes the closed-loop. No, if Q(s) satisfies RS condition. It may be the effect of initial peakings but not a destabilization. 3. It cannot handle large parameter variation. No in general. By following the design guidelines, any bounded variation can be handled. 4. Higher order Q(s) leads to instability. No in general. But, for higher order Q(s), the selection of coefficients becomes more complicated.
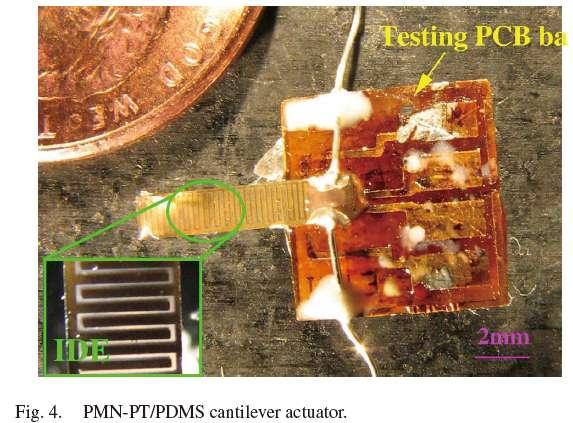
37 Taken from Yi, Chang, & Shen, IEEE/ASME Trans. Mechatronics, Experiments robust stability condition in action
38 38
39 Step responses 39

40 Robust tracking control [Bang/S/Park/Seo, IEEE Trans. Industrial Elect., 2010] 40 Hyundai HS-165 (handling 165kg)
41 Robust tracking control 41 Experiment results
42 Summary 42 theoretical study on DOB robust stability condition (new even for classical linear DOB) transient performance recovery (thanks to saturation/dead-zone functions) DOB = Inner-loop controller = Your first AID kit!
43 THANK YOU 감사합니다 Any feedback or comments are welcome
AS A POPULAR approach for compensating external
 IEEE TRANSACTIONS ON CONTROL SYSTEMS TECHNOLOGY, VOL. 16, NO. 1, JANUARY 2008 137 A Novel Robust Nonlinear Motion Controller With Disturbance Observer Zi-Jiang Yang, Hiroshi Tsubakihara, Shunshoku Kanae,
IEEE TRANSACTIONS ON CONTROL SYSTEMS TECHNOLOGY, VOL. 16, NO. 1, JANUARY 2008 137 A Novel Robust Nonlinear Motion Controller With Disturbance Observer Zi-Jiang Yang, Hiroshi Tsubakihara, Shunshoku Kanae,
Uncertainty and Robustness for SISO Systems
 Uncertainty and Robustness for SISO Systems ELEC 571L Robust Multivariable Control prepared by: Greg Stewart Outline Nature of uncertainty (models and signals). Physical sources of model uncertainty. Mathematical
Uncertainty and Robustness for SISO Systems ELEC 571L Robust Multivariable Control prepared by: Greg Stewart Outline Nature of uncertainty (models and signals). Physical sources of model uncertainty. Mathematical
Output Feedback Stabilization with Prescribed Performance for Uncertain Nonlinear Systems in Canonical Form
 Output Feedback Stabilization with Prescribed Performance for Uncertain Nonlinear Systems in Canonical Form Charalampos P. Bechlioulis, Achilles Theodorakopoulos 2 and George A. Rovithakis 2 Abstract The
Output Feedback Stabilization with Prescribed Performance for Uncertain Nonlinear Systems in Canonical Form Charalampos P. Bechlioulis, Achilles Theodorakopoulos 2 and George A. Rovithakis 2 Abstract The
UDE-based Robust Control for Nonlinear Systems with Mismatched Uncertainties and Input Saturation
 UDEbased Robust Control for Nonlinear Systems with Mismatched Uncertainties and Input Saturation DAI Jiguo, REN Beibei, ZHONG QingChang. Department of Mechanical Engineering, Texas Tech University, Lubbock,
UDEbased Robust Control for Nonlinear Systems with Mismatched Uncertainties and Input Saturation DAI Jiguo, REN Beibei, ZHONG QingChang. Department of Mechanical Engineering, Texas Tech University, Lubbock,
DISTURBANCE OBSERVER BASED CONTROL: CONCEPTS, METHODS AND CHALLENGES
 DISTURBANCE OBSERVER BASED CONTROL: CONCEPTS, METHODS AND CHALLENGES Wen-Hua Chen Professor in Autonomous Vehicles Department of Aeronautical and Automotive Engineering Loughborough University 1 Outline
DISTURBANCE OBSERVER BASED CONTROL: CONCEPTS, METHODS AND CHALLENGES Wen-Hua Chen Professor in Autonomous Vehicles Department of Aeronautical and Automotive Engineering Loughborough University 1 Outline
Chapter 2. Classical Control System Design. Dutch Institute of Systems and Control
 Chapter 2 Classical Control System Design Overview Ch. 2. 2. Classical control system design Introduction Introduction Steady-state Steady-state errors errors Type Type k k systems systems Integral Integral
Chapter 2 Classical Control System Design Overview Ch. 2. 2. Classical control system design Introduction Introduction Steady-state Steady-state errors errors Type Type k k systems systems Integral Integral
An asymptotic ratio characterization of input-to-state stability
 1 An asymptotic ratio characterization of input-to-state stability Daniel Liberzon and Hyungbo Shim Abstract For continuous-time nonlinear systems with inputs, we introduce the notion of an asymptotic
1 An asymptotic ratio characterization of input-to-state stability Daniel Liberzon and Hyungbo Shim Abstract For continuous-time nonlinear systems with inputs, we introduce the notion of an asymptotic
TWO- PHASE APPROACH TO DESIGN ROBUST CONTROLLER FOR UNCERTAIN INTERVAL SYSTEM USING GENETIC ALGORITHM
 International Journal of Electrical and Electronics Engineering Research (IJEEER) ISSN:2250-155X Vol.2, Issue 2 June 2012 27-38 TJPRC Pvt. Ltd., TWO- PHASE APPROACH TO DESIGN ROBUST CONTROLLER FOR UNCERTAIN
International Journal of Electrical and Electronics Engineering Research (IJEEER) ISSN:2250-155X Vol.2, Issue 2 June 2012 27-38 TJPRC Pvt. Ltd., TWO- PHASE APPROACH TO DESIGN ROBUST CONTROLLER FOR UNCERTAIN
FOR OVER 50 years, control engineers have appreciated
 IEEE TRANSACTIONS ON AUTOMATIC CONTROL, VOL. 49, NO. 7, JULY 2004 1081 Further Results on Robustness of (Possibly Discontinuous) Sample Hold Feedback Christopher M. Kellett, Member, IEEE, Hyungbo Shim,
IEEE TRANSACTIONS ON AUTOMATIC CONTROL, VOL. 49, NO. 7, JULY 2004 1081 Further Results on Robustness of (Possibly Discontinuous) Sample Hold Feedback Christopher M. Kellett, Member, IEEE, Hyungbo Shim,
Control Systems Design
 ELEC4410 Control Systems Design Lecture 3, Part 2: Introduction to Affine Parametrisation School of Electrical Engineering and Computer Science Lecture 3, Part 2: Affine Parametrisation p. 1/29 Outline
ELEC4410 Control Systems Design Lecture 3, Part 2: Introduction to Affine Parametrisation School of Electrical Engineering and Computer Science Lecture 3, Part 2: Affine Parametrisation p. 1/29 Outline
Robust Stabilization of Non-Minimum Phase Nonlinear Systems Using Extended High Gain Observers
 28 American Control Conference Westin Seattle Hotel, Seattle, Washington, USA June 11-13, 28 WeC15.1 Robust Stabilization of Non-Minimum Phase Nonlinear Systems Using Extended High Gain Observers Shahid
28 American Control Conference Westin Seattle Hotel, Seattle, Washington, USA June 11-13, 28 WeC15.1 Robust Stabilization of Non-Minimum Phase Nonlinear Systems Using Extended High Gain Observers Shahid
Robust Internal Model Control for Impulse Elimination of Singular Systems
 International Journal of Control Science and Engineering ; (): -7 DOI:.59/j.control.. Robust Internal Model Control for Impulse Elimination of Singular Systems M. M. Share Pasandand *, H. D. Taghirad Department
International Journal of Control Science and Engineering ; (): -7 DOI:.59/j.control.. Robust Internal Model Control for Impulse Elimination of Singular Systems M. M. Share Pasandand *, H. D. Taghirad Department
A Disturbance Observer Enhanced Composite Cascade Control with Experimental Studies
 Submission to International Journal of Control, Automation, and Systems 1 A Disturbance Observer Enhanced Composite Cascade Control with Experimental Studies Xisong Chen, Juan Li, Jun Yang, Shihua Li Abstract:
Submission to International Journal of Control, Automation, and Systems 1 A Disturbance Observer Enhanced Composite Cascade Control with Experimental Studies Xisong Chen, Juan Li, Jun Yang, Shihua Li Abstract:
An Iteration-Domain Filter for Controlling Transient Growth in Iterative Learning Control
 21 American Control Conference Marriott Waterfront, Baltimore, MD, USA June 3-July 2, 21 WeC14.1 An Iteration-Domain Filter for Controlling Transient Growth in Iterative Learning Control Qing Liu and Douglas
21 American Control Conference Marriott Waterfront, Baltimore, MD, USA June 3-July 2, 21 WeC14.1 An Iteration-Domain Filter for Controlling Transient Growth in Iterative Learning Control Qing Liu and Douglas
H-INFINITY CONTROLLER DESIGN FOR A DC MOTOR MODEL WITH UNCERTAIN PARAMETERS
 Engineering MECHANICS, Vol. 18, 211, No. 5/6, p. 271 279 271 H-INFINITY CONTROLLER DESIGN FOR A DC MOTOR MODEL WITH UNCERTAIN PARAMETERS Lukáš Březina*, Tomáš Březina** The proposed article deals with
Engineering MECHANICS, Vol. 18, 211, No. 5/6, p. 271 279 271 H-INFINITY CONTROLLER DESIGN FOR A DC MOTOR MODEL WITH UNCERTAIN PARAMETERS Lukáš Březina*, Tomáš Březina** The proposed article deals with
ECSE 4962 Control Systems Design. A Brief Tutorial on Control Design
 ECSE 4962 Control Systems Design A Brief Tutorial on Control Design Instructor: Professor John T. Wen TA: Ben Potsaid http://www.cat.rpi.edu/~wen/ecse4962s04/ Don t Wait Until The Last Minute! You got
ECSE 4962 Control Systems Design A Brief Tutorial on Control Design Instructor: Professor John T. Wen TA: Ben Potsaid http://www.cat.rpi.edu/~wen/ecse4962s04/ Don t Wait Until The Last Minute! You got
Linear State Feedback Controller Design
 Assignment For EE5101 - Linear Systems Sem I AY2010/2011 Linear State Feedback Controller Design Phang Swee King A0033585A Email: king@nus.edu.sg NGS/ECE Dept. Faculty of Engineering National University
Assignment For EE5101 - Linear Systems Sem I AY2010/2011 Linear State Feedback Controller Design Phang Swee King A0033585A Email: king@nus.edu.sg NGS/ECE Dept. Faculty of Engineering National University
Lecture 13: Internal Model Principle and Repetitive Control
 ME 233, UC Berkeley, Spring 2014 Xu Chen Lecture 13: Internal Model Principle and Repetitive Control Big picture review of integral control in PID design example: 0 Es) C s) Ds) + + P s) Y s) where P s)
ME 233, UC Berkeley, Spring 2014 Xu Chen Lecture 13: Internal Model Principle and Repetitive Control Big picture review of integral control in PID design example: 0 Es) C s) Ds) + + P s) Y s) where P s)
NONLINEAR CONTROL with LIMITED INFORMATION. Daniel Liberzon
 NONLINEAR CONTROL with LIMITED INFORMATION Daniel Liberzon Coordinated Science Laboratory and Dept. of Electrical & Computer Eng., Univ. of Illinois at Urbana-Champaign Plenary talk, 2 nd Indian Control
NONLINEAR CONTROL with LIMITED INFORMATION Daniel Liberzon Coordinated Science Laboratory and Dept. of Electrical & Computer Eng., Univ. of Illinois at Urbana-Champaign Plenary talk, 2 nd Indian Control
1 An Overview and Brief History of Feedback Control 1. 2 Dynamic Models 23. Contents. Preface. xiii
 Contents 1 An Overview and Brief History of Feedback Control 1 A Perspective on Feedback Control 1 Chapter Overview 2 1.1 A Simple Feedback System 3 1.2 A First Analysis of Feedback 6 1.3 Feedback System
Contents 1 An Overview and Brief History of Feedback Control 1 A Perspective on Feedback Control 1 Chapter Overview 2 1.1 A Simple Feedback System 3 1.2 A First Analysis of Feedback 6 1.3 Feedback System
Output Regulation of Uncertain Nonlinear Systems with Nonlinear Exosystems
 Output Regulation of Uncertain Nonlinear Systems with Nonlinear Exosystems Zhengtao Ding Manchester School of Engineering, University of Manchester Oxford Road, Manchester M3 9PL, United Kingdom zhengtaoding@manacuk
Output Regulation of Uncertain Nonlinear Systems with Nonlinear Exosystems Zhengtao Ding Manchester School of Engineering, University of Manchester Oxford Road, Manchester M3 9PL, United Kingdom zhengtaoding@manacuk
Bifurcations in Switching Converters: From Theory to Design
 Presented at Tokushima University, August 2008 Bifurcations in Switching Converters: From Theory to Design C. K. Michael Tse Department of Electronic and Information Engineering The Hong H Kong Polytechnic
Presented at Tokushima University, August 2008 Bifurcations in Switching Converters: From Theory to Design C. K. Michael Tse Department of Electronic and Information Engineering The Hong H Kong Polytechnic
Estimation-based Disturbance Rejection in Control for Limit Cycle Generation on Inertia wheel Inverted Pendulum Testbed
 Estimation-based Disturbance Rejection in Control for Limit Cycle Generation on Inertia wheel Inverted Pendulum Testbed Sébastien Andary, Ahmed Chemori, Sébastien Krut To cite this version: Sébastien Andary,
Estimation-based Disturbance Rejection in Control for Limit Cycle Generation on Inertia wheel Inverted Pendulum Testbed Sébastien Andary, Ahmed Chemori, Sébastien Krut To cite this version: Sébastien Andary,
Design of Nonlinear Control Systems with the Highest Derivative in Feedback
 SERIES ON STAB1UTY, VIBRATION AND CONTROL OF SYSTEMS SeriesA Volume 16 Founder & Editor: Ardeshir Guran Co-Editors: M. Cloud & W. B. Zimmerman Design of Nonlinear Control Systems with the Highest Derivative
SERIES ON STAB1UTY, VIBRATION AND CONTROL OF SYSTEMS SeriesA Volume 16 Founder & Editor: Ardeshir Guran Co-Editors: M. Cloud & W. B. Zimmerman Design of Nonlinear Control Systems with the Highest Derivative
On Convergence of Nonlinear Active Disturbance Rejection for SISO Systems
 On Convergence of Nonlinear Active Disturbance Rejection for SISO Systems Bao-Zhu Guo 1, Zhi-Liang Zhao 2, 1 Academy of Mathematics and Systems Science, Academia Sinica, Beijing, 100190, China E-mail:
On Convergence of Nonlinear Active Disturbance Rejection for SISO Systems Bao-Zhu Guo 1, Zhi-Liang Zhao 2, 1 Academy of Mathematics and Systems Science, Academia Sinica, Beijing, 100190, China E-mail:
Robust Tuning of Power System Stabilizers Using Coefficient Diagram Method
 International Journal of Electrical Engineering. ISSN 0974-2158 Volume 7, Number 2 (2014), pp. 257-270 International Research Publication House http://www.irphouse.com Robust Tuning of Power System Stabilizers
International Journal of Electrical Engineering. ISSN 0974-2158 Volume 7, Number 2 (2014), pp. 257-270 International Research Publication House http://www.irphouse.com Robust Tuning of Power System Stabilizers
Aircraft Stability & Control
 Aircraft Stability & Control Textbook Automatic control of Aircraft and missiles 2 nd Edition by John H Blakelock References Aircraft Dynamics and Automatic Control - McRuler & Ashkenas Aerodynamics, Aeronautics
Aircraft Stability & Control Textbook Automatic control of Aircraft and missiles 2 nd Edition by John H Blakelock References Aircraft Dynamics and Automatic Control - McRuler & Ashkenas Aerodynamics, Aeronautics
Quasi-ISS Reduced-Order Observers and Quantized Output Feedback
 Joint 48th IEEE Conference on Decision and Control and 28th Chinese Control Conference Shanghai, P.R. China, December 16-18, 2009 FrA11.5 Quasi-ISS Reduced-Order Observers and Quantized Output Feedback
Joint 48th IEEE Conference on Decision and Control and 28th Chinese Control Conference Shanghai, P.R. China, December 16-18, 2009 FrA11.5 Quasi-ISS Reduced-Order Observers and Quantized Output Feedback
Control System Design
 ELEC ENG 4CL4: Control System Design Notes for Lecture #36 Dr. Ian C. Bruce Room: CRL-229 Phone ext.: 26984 Email: ibruce@mail.ece.mcmaster.ca Friday, April 4, 2003 3. Cascade Control Next we turn to an
ELEC ENG 4CL4: Control System Design Notes for Lecture #36 Dr. Ian C. Bruce Room: CRL-229 Phone ext.: 26984 Email: ibruce@mail.ece.mcmaster.ca Friday, April 4, 2003 3. Cascade Control Next we turn to an
DESIGN OF ROBUST CONTROL SYSTEM FOR THE PMS MOTOR
 Journal of ELECTRICAL ENGINEERING, VOL 58, NO 6, 2007, 326 333 DESIGN OF ROBUST CONTROL SYSTEM FOR THE PMS MOTOR Ahmed Azaiz Youcef Ramdani Abdelkader Meroufel The field orientation control (FOC) consists
Journal of ELECTRICAL ENGINEERING, VOL 58, NO 6, 2007, 326 333 DESIGN OF ROBUST CONTROL SYSTEM FOR THE PMS MOTOR Ahmed Azaiz Youcef Ramdani Abdelkader Meroufel The field orientation control (FOC) consists
Video 5.1 Vijay Kumar and Ani Hsieh
 Video 5.1 Vijay Kumar and Ani Hsieh Robo3x-1.1 1 The Purpose of Control Input/Stimulus/ Disturbance System or Plant Output/ Response Understand the Black Box Evaluate the Performance Change the Behavior
Video 5.1 Vijay Kumar and Ani Hsieh Robo3x-1.1 1 The Purpose of Control Input/Stimulus/ Disturbance System or Plant Output/ Response Understand the Black Box Evaluate the Performance Change the Behavior
Dr Ian R. Manchester
 Week Content Notes 1 Introduction 2 Frequency Domain Modelling 3 Transient Performance and the s-plane 4 Block Diagrams 5 Feedback System Characteristics Assign 1 Due 6 Root Locus 7 Root Locus 2 Assign
Week Content Notes 1 Introduction 2 Frequency Domain Modelling 3 Transient Performance and the s-plane 4 Block Diagrams 5 Feedback System Characteristics Assign 1 Due 6 Root Locus 7 Root Locus 2 Assign
CHAPTER 5 ROBUSTNESS ANALYSIS OF THE CONTROLLER
 114 CHAPTER 5 ROBUSTNESS ANALYSIS OF THE CONTROLLER 5.1 INTRODUCTION Robust control is a branch of control theory that explicitly deals with uncertainty in its approach to controller design. It also refers
114 CHAPTER 5 ROBUSTNESS ANALYSIS OF THE CONTROLLER 5.1 INTRODUCTION Robust control is a branch of control theory that explicitly deals with uncertainty in its approach to controller design. It also refers
Design and Experiment of Add-on Track Following Controller for Optical Disc Drives based on Robust Output Regulation
 Design and Experiment of Add-on Track Following Controller for Optical Disc Drives based on Robust Output Regulation H. Shim, H. Kim and C.C. Chung Abstract An add-on type output regulator is proposed
Design and Experiment of Add-on Track Following Controller for Optical Disc Drives based on Robust Output Regulation H. Shim, H. Kim and C.C. Chung Abstract An add-on type output regulator is proposed
Analysis and Synthesis of Single-Input Single-Output Control Systems
 Lino Guzzella Analysis and Synthesis of Single-Input Single-Output Control Systems l+kja» \Uja>)W2(ja»\ um Contents 1 Definitions and Problem Formulations 1 1.1 Introduction 1 1.2 Definitions 1 1.2.1 Systems
Lino Guzzella Analysis and Synthesis of Single-Input Single-Output Control Systems l+kja» \Uja>)W2(ja»\ um Contents 1 Definitions and Problem Formulations 1 1.1 Introduction 1 1.2 Definitions 1 1.2.1 Systems
Internal Model Control of A Class of Continuous Linear Underactuated Systems
 Internal Model Control of A Class of Continuous Linear Underactuated Systems Asma Mezzi Tunis El Manar University, Automatic Control Research Laboratory, LA.R.A, National Engineering School of Tunis (ENIT),
Internal Model Control of A Class of Continuous Linear Underactuated Systems Asma Mezzi Tunis El Manar University, Automatic Control Research Laboratory, LA.R.A, National Engineering School of Tunis (ENIT),
QFT Framework for Robust Tuning of Power System Stabilizers
 45-E-PSS-75 QFT Framework for Robust Tuning of Power System Stabilizers Seyyed Mohammad Mahdi Alavi, Roozbeh Izadi-Zamanabadi Department of Control Engineering, Aalborg University, Denmark Correspondence
45-E-PSS-75 QFT Framework for Robust Tuning of Power System Stabilizers Seyyed Mohammad Mahdi Alavi, Roozbeh Izadi-Zamanabadi Department of Control Engineering, Aalborg University, Denmark Correspondence
DERIVATIVE FREE OUTPUT FEEDBACK ADAPTIVE CONTROL
 DERIVATIVE FREE OUTPUT FEEDBACK ADAPTIVE CONTROL Tansel YUCELEN, * Kilsoo KIM, and Anthony J. CALISE Georgia Institute of Technology, Yucelen Atlanta, * GA 30332, USA * tansel@gatech.edu AIAA Guidance,
DERIVATIVE FREE OUTPUT FEEDBACK ADAPTIVE CONTROL Tansel YUCELEN, * Kilsoo KIM, and Anthony J. CALISE Georgia Institute of Technology, Yucelen Atlanta, * GA 30332, USA * tansel@gatech.edu AIAA Guidance,
ADAPTIVE control of uncertain time-varying plants is a
 IEEE TRANSACTIONS ON AUTOMATIC CONTROL, VOL. 56, NO. 1, JANUARY 2011 27 Supervisory Control of Uncertain Linear Time-Varying Systems Linh Vu, Member, IEEE, Daniel Liberzon, Senior Member, IEEE Abstract
IEEE TRANSACTIONS ON AUTOMATIC CONTROL, VOL. 56, NO. 1, JANUARY 2011 27 Supervisory Control of Uncertain Linear Time-Varying Systems Linh Vu, Member, IEEE, Daniel Liberzon, Senior Member, IEEE Abstract
QUANTIZED SYSTEMS AND CONTROL. Daniel Liberzon. DISC HS, June Dept. of Electrical & Computer Eng., Univ. of Illinois at Urbana-Champaign
 QUANTIZED SYSTEMS AND CONTROL Daniel Liberzon Coordinated Science Laboratory and Dept. of Electrical & Computer Eng., Univ. of Illinois at Urbana-Champaign DISC HS, June 2003 HYBRID CONTROL Plant: u y
QUANTIZED SYSTEMS AND CONTROL Daniel Liberzon Coordinated Science Laboratory and Dept. of Electrical & Computer Eng., Univ. of Illinois at Urbana-Champaign DISC HS, June 2003 HYBRID CONTROL Plant: u y
Disturbance Attenuation for a Class of Nonlinear Systems by Output Feedback
 Disturbance Attenuation for a Class of Nonlinear Systems by Output Feedback Wei in Chunjiang Qian and Xianqing Huang Submitted to Systems & Control etters /5/ Abstract This paper studies the problem of
Disturbance Attenuation for a Class of Nonlinear Systems by Output Feedback Wei in Chunjiang Qian and Xianqing Huang Submitted to Systems & Control etters /5/ Abstract This paper studies the problem of
Robust Semiglobal Nonlinear Output Regulation The case of systems in triangular form
 Robust Semiglobal Nonlinear Output Regulation The case of systems in triangular form Andrea Serrani Department of Electrical and Computer Engineering Collaborative Center for Control Sciences The Ohio
Robust Semiglobal Nonlinear Output Regulation The case of systems in triangular form Andrea Serrani Department of Electrical and Computer Engineering Collaborative Center for Control Sciences The Ohio
Chapter 7 Interconnected Systems and Feedback: Well-Posedness, Stability, and Performance 7. Introduction Feedback control is a powerful approach to o
 Lectures on Dynamic Systems and Control Mohammed Dahleh Munther A. Dahleh George Verghese Department of Electrical Engineering and Computer Science Massachuasetts Institute of Technology c Chapter 7 Interconnected
Lectures on Dynamic Systems and Control Mohammed Dahleh Munther A. Dahleh George Verghese Department of Electrical Engineering and Computer Science Massachuasetts Institute of Technology c Chapter 7 Interconnected
Autonomous Helicopter Landing A Nonlinear Output Regulation Perspective
 Autonomous Helicopter Landing A Nonlinear Output Regulation Perspective Andrea Serrani Department of Electrical and Computer Engineering Collaborative Center for Control Sciences The Ohio State University
Autonomous Helicopter Landing A Nonlinear Output Regulation Perspective Andrea Serrani Department of Electrical and Computer Engineering Collaborative Center for Control Sciences The Ohio State University
SINCE THE formulation and solution of the problem of
 IEEE TRANSACTIONS ON AUTOMATIC CONTROL, VOL 49, NO 11, NOVEMBER 2004 1941 Output Regulation of Linear Systems With Bounded Continuous Feedback Tingshu Hu, Senior Member, IEEE, Zongli Lin, Senior Member,
IEEE TRANSACTIONS ON AUTOMATIC CONTROL, VOL 49, NO 11, NOVEMBER 2004 1941 Output Regulation of Linear Systems With Bounded Continuous Feedback Tingshu Hu, Senior Member, IEEE, Zongli Lin, Senior Member,
PERIODIC signals are commonly experienced in industrial
 IEEE TRANSACTIONS ON CONTROL SYSTEMS TECHNOLOGY, VOL. 15, NO. 2, MARCH 2007 369 Repetitive Learning Control of Nonlinear Continuous-Time Systems Using Quasi-Sliding Mode Xiao-Dong Li, Tommy W. S. Chow,
IEEE TRANSACTIONS ON CONTROL SYSTEMS TECHNOLOGY, VOL. 15, NO. 2, MARCH 2007 369 Repetitive Learning Control of Nonlinear Continuous-Time Systems Using Quasi-Sliding Mode Xiao-Dong Li, Tommy W. S. Chow,
Design of Decentralised PI Controller using Model Reference Adaptive Control for Quadruple Tank Process
 Design of Decentralised PI Controller using Model Reference Adaptive Control for Quadruple Tank Process D.Angeline Vijula #, Dr.N.Devarajan * # Electronics and Instrumentation Engineering Sri Ramakrishna
Design of Decentralised PI Controller using Model Reference Adaptive Control for Quadruple Tank Process D.Angeline Vijula #, Dr.N.Devarajan * # Electronics and Instrumentation Engineering Sri Ramakrishna
Semi-global Robust Output Regulation for a Class of Nonlinear Systems Using Output Feedback
 2005 American Control Conference June 8-10, 2005. Portland, OR, USA FrC17.5 Semi-global Robust Output Regulation for a Class of Nonlinear Systems Using Output Feedback Weiyao Lan, Zhiyong Chen and Jie
2005 American Control Conference June 8-10, 2005. Portland, OR, USA FrC17.5 Semi-global Robust Output Regulation for a Class of Nonlinear Systems Using Output Feedback Weiyao Lan, Zhiyong Chen and Jie
Observer-based sampled-data controller of linear system for the wave energy converter
 International Journal of Fuzzy Logic and Intelligent Systems, vol. 11, no. 4, December 211, pp. 275-279 http://dx.doi.org/1.5391/ijfis.211.11.4.275 Observer-based sampled-data controller of linear system
International Journal of Fuzzy Logic and Intelligent Systems, vol. 11, no. 4, December 211, pp. 275-279 http://dx.doi.org/1.5391/ijfis.211.11.4.275 Observer-based sampled-data controller of linear system
Observer Based Friction Cancellation in Mechanical Systems
 2014 14th International Conference on Control, Automation and Systems (ICCAS 2014) Oct. 22 25, 2014 in KINTEX, Gyeonggi-do, Korea Observer Based Friction Cancellation in Mechanical Systems Caner Odabaş
2014 14th International Conference on Control, Automation and Systems (ICCAS 2014) Oct. 22 25, 2014 in KINTEX, Gyeonggi-do, Korea Observer Based Friction Cancellation in Mechanical Systems Caner Odabaş
CDS 101/110a: Lecture 10-1 Robust Performance
 CDS 11/11a: Lecture 1-1 Robust Performance Richard M. Murray 1 December 28 Goals: Describe how to represent uncertainty in process dynamics Describe how to analyze a system in the presence of uncertainty
CDS 11/11a: Lecture 1-1 Robust Performance Richard M. Murray 1 December 28 Goals: Describe how to represent uncertainty in process dynamics Describe how to analyze a system in the presence of uncertainty
Control Systems. University Questions
 University Questions UNIT-1 1. Distinguish between open loop and closed loop control system. Describe two examples for each. (10 Marks), Jan 2009, June 12, Dec 11,July 08, July 2009, Dec 2010 2. Write
University Questions UNIT-1 1. Distinguish between open loop and closed loop control system. Describe two examples for each. (10 Marks), Jan 2009, June 12, Dec 11,July 08, July 2009, Dec 2010 2. Write
Adaptive and Robust Controls of Uncertain Systems With Nonlinear Parameterization
 IEEE TRANSACTIONS ON AUTOMATIC CONTROL, VOL. 48, NO. 0, OCTOBER 003 87 Adaptive and Robust Controls of Uncertain Systems With Nonlinear Parameterization Zhihua Qu Abstract Two classes of partially known
IEEE TRANSACTIONS ON AUTOMATIC CONTROL, VOL. 48, NO. 0, OCTOBER 003 87 Adaptive and Robust Controls of Uncertain Systems With Nonlinear Parameterization Zhihua Qu Abstract Two classes of partially known
FEL3210 Multivariable Feedback Control
 FEL3210 Multivariable Feedback Control Lecture 5: Uncertainty and Robustness in SISO Systems [Ch.7-(8)] Elling W. Jacobsen, Automatic Control Lab, KTH Lecture 5:Uncertainty and Robustness () FEL3210 MIMO
FEL3210 Multivariable Feedback Control Lecture 5: Uncertainty and Robustness in SISO Systems [Ch.7-(8)] Elling W. Jacobsen, Automatic Control Lab, KTH Lecture 5:Uncertainty and Robustness () FEL3210 MIMO
A Design Method of A Robust Controller for Hydraulic Actuation with Disturbance Observers
 A Design Method of A Robust Controller for Hydraulic Actuation with Disturbance Observers Hiroaki Kuwahara, Fujio Terai Corporate Manufacturing Engineering Center, TOSHIBA Corporation, Yokohama, Japan
A Design Method of A Robust Controller for Hydraulic Actuation with Disturbance Observers Hiroaki Kuwahara, Fujio Terai Corporate Manufacturing Engineering Center, TOSHIBA Corporation, Yokohama, Japan
A DISCRETE-TIME SLIDING MODE CONTROLLER WITH MODIFIED FUNCTION FOR LINEAR TIME- VARYING SYSTEMS
 http:// A DISCRETE-TIME SLIDING MODE CONTROLLER WITH MODIFIED FUNCTION FOR LINEAR TIME- VARYING SYSTEMS Deelendra Pratap Singh 1, Anil Sharma 2, Shalabh Agarwal 3 1,2 Department of Electronics & Communication
http:// A DISCRETE-TIME SLIDING MODE CONTROLLER WITH MODIFIED FUNCTION FOR LINEAR TIME- VARYING SYSTEMS Deelendra Pratap Singh 1, Anil Sharma 2, Shalabh Agarwal 3 1,2 Department of Electronics & Communication
High-Gain Observers in Nonlinear Feedback Control
 High-Gain Observers in Nonlinear Feedback Control Lecture # 1 Introduction & Stabilization High-Gain ObserversinNonlinear Feedback ControlLecture # 1Introduction & Stabilization p. 1/4 Brief History Linear
High-Gain Observers in Nonlinear Feedback Control Lecture # 1 Introduction & Stabilization High-Gain ObserversinNonlinear Feedback ControlLecture # 1Introduction & Stabilization p. 1/4 Brief History Linear
Stability and composition of transfer functions
 Problem 1.1 Stability and composition of transfer functions G. Fernández-Anaya Departamento de Ciencias Básicas Universidad Iberoaméricana Lomas de Santa Fe 01210 México D.F. México guillermo.fernandez@uia.mx
Problem 1.1 Stability and composition of transfer functions G. Fernández-Anaya Departamento de Ciencias Básicas Universidad Iberoaméricana Lomas de Santa Fe 01210 México D.F. México guillermo.fernandez@uia.mx
CHAPTER 3 TUNING METHODS OF CONTROLLER
 57 CHAPTER 3 TUNING METHODS OF CONTROLLER 3.1 INTRODUCTION This chapter deals with a simple method of designing PI and PID controllers for first order plus time delay with integrator systems (FOPTDI).
57 CHAPTER 3 TUNING METHODS OF CONTROLLER 3.1 INTRODUCTION This chapter deals with a simple method of designing PI and PID controllers for first order plus time delay with integrator systems (FOPTDI).
9. Two-Degrees-of-Freedom Design
 9. Two-Degrees-of-Freedom Design In some feedback schemes we have additional degrees-offreedom outside the feedback path. For example, feed forwarding known disturbance signals or reference signals. In
9. Two-Degrees-of-Freedom Design In some feedback schemes we have additional degrees-offreedom outside the feedback path. For example, feed forwarding known disturbance signals or reference signals. In
Control System Design
 ELEC4410 Control System Design Lecture 19: Feedback from Estimated States and Discrete-Time Control Design Julio H. Braslavsky julio@ee.newcastle.edu.au School of Electrical Engineering and Computer Science
ELEC4410 Control System Design Lecture 19: Feedback from Estimated States and Discrete-Time Control Design Julio H. Braslavsky julio@ee.newcastle.edu.au School of Electrical Engineering and Computer Science
ECEN 605 LINEAR SYSTEMS. Lecture 20 Characteristics of Feedback Control Systems II Feedback and Stability 1/27
 1/27 ECEN 605 LINEAR SYSTEMS Lecture 20 Characteristics of Feedback Control Systems II Feedback and Stability Feedback System Consider the feedback system u + G ol (s) y Figure 1: A unity feedback system
1/27 ECEN 605 LINEAR SYSTEMS Lecture 20 Characteristics of Feedback Control Systems II Feedback and Stability Feedback System Consider the feedback system u + G ol (s) y Figure 1: A unity feedback system
A unified double-loop multi-scale control strategy for NMP integrating-unstable systems
 Home Search Collections Journals About Contact us My IOPscience A unified double-loop multi-scale control strategy for NMP integrating-unstable systems This content has been downloaded from IOPscience.
Home Search Collections Journals About Contact us My IOPscience A unified double-loop multi-scale control strategy for NMP integrating-unstable systems This content has been downloaded from IOPscience.
Robust Stabilization of Jet Engine Compressor in the Presence of Noise and Unmeasured States
 obust Stabilization of Jet Engine Compressor in the Presence of Noise and Unmeasured States John A Akpobi, Member, IAENG and Aloagbaye I Momodu Abstract Compressors for jet engines in operation experience
obust Stabilization of Jet Engine Compressor in the Presence of Noise and Unmeasured States John A Akpobi, Member, IAENG and Aloagbaye I Momodu Abstract Compressors for jet engines in operation experience
L -Bounded Robust Control of Nonlinear Cascade Systems
 L -Bounded Robust Control of Nonlinear Cascade Systems Shoudong Huang M.R. James Z.P. Jiang August 19, 2004 Accepted by Systems & Control Letters Abstract In this paper, we consider the L -bounded robust
L -Bounded Robust Control of Nonlinear Cascade Systems Shoudong Huang M.R. James Z.P. Jiang August 19, 2004 Accepted by Systems & Control Letters Abstract In this paper, we consider the L -bounded robust
CDS 101/110a: Lecture 8-1 Frequency Domain Design
 CDS 11/11a: Lecture 8-1 Frequency Domain Design Richard M. Murray 17 November 28 Goals: Describe canonical control design problem and standard performance measures Show how to use loop shaping to achieve
CDS 11/11a: Lecture 8-1 Frequency Domain Design Richard M. Murray 17 November 28 Goals: Describe canonical control design problem and standard performance measures Show how to use loop shaping to achieve
Design and Implementation of Sliding Mode Controller using Coefficient Diagram Method for a nonlinear process
 IOSR Journal of Electrical and Electronics Engineering (IOSR-JEEE) e-issn: 2278-1676,p-ISSN: 2320-3331, Volume 7, Issue 5 (Sep. - Oct. 2013), PP 19-24 Design and Implementation of Sliding Mode Controller
IOSR Journal of Electrical and Electronics Engineering (IOSR-JEEE) e-issn: 2278-1676,p-ISSN: 2320-3331, Volume 7, Issue 5 (Sep. - Oct. 2013), PP 19-24 Design and Implementation of Sliding Mode Controller
IEEE TRANSACTIONS ON AUTOMATIC CONTROL, VOL. 50, NO. 5, MAY Bo Yang, Student Member, IEEE, and Wei Lin, Senior Member, IEEE (1.
 IEEE TRANSACTIONS ON AUTOMATIC CONTROL, VOL 50, NO 5, MAY 2005 619 Robust Output Feedback Stabilization of Uncertain Nonlinear Systems With Uncontrollable and Unobservable Linearization Bo Yang, Student
IEEE TRANSACTIONS ON AUTOMATIC CONTROL, VOL 50, NO 5, MAY 2005 619 Robust Output Feedback Stabilization of Uncertain Nonlinear Systems With Uncontrollable and Unobservable Linearization Bo Yang, Student
LECTURE 3 CMOS PHASE LOCKED LOOPS
 Lecture 03 (8/9/18) Page 3-1 LECTURE 3 CMOS PHASE LOCKED LOOPS Topics The acquisition process unlocked state Noise in linear PLLs Organization: Systems Perspective Types of PLLs and PLL Measurements PLL
Lecture 03 (8/9/18) Page 3-1 LECTURE 3 CMOS PHASE LOCKED LOOPS Topics The acquisition process unlocked state Noise in linear PLLs Organization: Systems Perspective Types of PLLs and PLL Measurements PLL
OUTPUT FEEDBACK STABILIZATION FOR COMPLETELY UNIFORMLY OBSERVABLE NONLINEAR SYSTEMS. H. Shim, J. Jin, J. S. Lee and Jin H. Seo
 OUTPUT FEEDBACK STABILIZATION FOR COMPLETELY UNIFORMLY OBSERVABLE NONLINEAR SYSTEMS H. Shim, J. Jin, J. S. Lee and Jin H. Seo School of Electrical Engineering, Seoul National University San 56-, Shilim-Dong,
OUTPUT FEEDBACK STABILIZATION FOR COMPLETELY UNIFORMLY OBSERVABLE NONLINEAR SYSTEMS H. Shim, J. Jin, J. S. Lee and Jin H. Seo School of Electrical Engineering, Seoul National University San 56-, Shilim-Dong,
AN EXTENSION OF GENERALIZED BILINEAR TRANSFORMATION FOR DIGITAL REDESIGN. Received October 2010; revised March 2011
 International Journal of Innovative Computing, Information and Control ICIC International c 2012 ISSN 1349-4198 Volume 8, Number 6, June 2012 pp. 4071 4081 AN EXTENSION OF GENERALIZED BILINEAR TRANSFORMATION
International Journal of Innovative Computing, Information and Control ICIC International c 2012 ISSN 1349-4198 Volume 8, Number 6, June 2012 pp. 4071 4081 AN EXTENSION OF GENERALIZED BILINEAR TRANSFORMATION
Position and Velocity Profile Tracking Control for New Generation Servo Track Writing
 Preprints of the 9th World Congress The International Federation of Automatic Control Cape Town, South Africa. August 24-29, 24 Position and Velocity Profile Tracking Control for New Generation Servo Track
Preprints of the 9th World Congress The International Federation of Automatic Control Cape Town, South Africa. August 24-29, 24 Position and Velocity Profile Tracking Control for New Generation Servo Track
EEE 184: Introduction to feedback systems
 EEE 84: Introduction to feedback systems Summary 6 8 8 x 7 7 6 Level() 6 5 4 4 5 5 time(s) 4 6 8 Time (seconds) Fig.. Illustration of BIBO stability: stable system (the input is a unit step) Fig.. step)
EEE 84: Introduction to feedback systems Summary 6 8 8 x 7 7 6 Level() 6 5 4 4 5 5 time(s) 4 6 8 Time (seconds) Fig.. Illustration of BIBO stability: stable system (the input is a unit step) Fig.. step)
Output Regulation of Non-Minimum Phase Nonlinear Systems Using Extended High-Gain Observers
 Milano (Italy) August 28 - September 2, 2 Output Regulation of Non-Minimum Phase Nonlinear Systems Using Extended High-Gain Observers Shahid Nazrulla Hassan K Khalil Electrical & Computer Engineering,
Milano (Italy) August 28 - September 2, 2 Output Regulation of Non-Minimum Phase Nonlinear Systems Using Extended High-Gain Observers Shahid Nazrulla Hassan K Khalil Electrical & Computer Engineering,
System Parameter Identification for Uncertain Two Degree of Freedom Vibration System
 System Parameter Identification for Uncertain Two Degree of Freedom Vibration System Hojong Lee and Yong Suk Kang Department of Mechanical Engineering, Virginia Tech 318 Randolph Hall, Blacksburg, VA,
System Parameter Identification for Uncertain Two Degree of Freedom Vibration System Hojong Lee and Yong Suk Kang Department of Mechanical Engineering, Virginia Tech 318 Randolph Hall, Blacksburg, VA,
IN recent years, controller design for systems having complex
 818 IEEE TRANSACTIONS ON SYSTEMS, MAN, AND CYBERNETICS PART B: CYBERNETICS, VOL 29, NO 6, DECEMBER 1999 Adaptive Neural Network Control of Nonlinear Systems by State and Output Feedback S S Ge, Member,
818 IEEE TRANSACTIONS ON SYSTEMS, MAN, AND CYBERNETICS PART B: CYBERNETICS, VOL 29, NO 6, DECEMBER 1999 Adaptive Neural Network Control of Nonlinear Systems by State and Output Feedback S S Ge, Member,
Adaptive Robust Control for Servo Mechanisms With Partially Unknown States via Dynamic Surface Control Approach
 IEEE TRANSACTIONS ON CONTROL SYSTEMS TECHNOLOGY, VOL. 18, NO. 3, MAY 2010 723 Adaptive Robust Control for Servo Mechanisms With Partially Unknown States via Dynamic Surface Control Approach Guozhu Zhang,
IEEE TRANSACTIONS ON CONTROL SYSTEMS TECHNOLOGY, VOL. 18, NO. 3, MAY 2010 723 Adaptive Robust Control for Servo Mechanisms With Partially Unknown States via Dynamic Surface Control Approach Guozhu Zhang,
Lyapunov Stability of Linear Predictor Feedback for Distributed Input Delays
 IEEE TRANSACTIONS ON AUTOMATIC CONTROL VOL. 56 NO. 3 MARCH 2011 655 Lyapunov Stability of Linear Predictor Feedback for Distributed Input Delays Nikolaos Bekiaris-Liberis Miroslav Krstic In this case system
IEEE TRANSACTIONS ON AUTOMATIC CONTROL VOL. 56 NO. 3 MARCH 2011 655 Lyapunov Stability of Linear Predictor Feedback for Distributed Input Delays Nikolaos Bekiaris-Liberis Miroslav Krstic In this case system
Iterative Feedback Tuning
 Iterative Feedback Tuning Michel Gevers CESAME - UCL Louvain-la-Neuve Belgium Collaboration : H. Hjalmarsson, S. Gunnarsson, O. Lequin, E. Bosmans, L. Triest, M. Mossberg Outline Problem formulation Iterative
Iterative Feedback Tuning Michel Gevers CESAME - UCL Louvain-la-Neuve Belgium Collaboration : H. Hjalmarsson, S. Gunnarsson, O. Lequin, E. Bosmans, L. Triest, M. Mossberg Outline Problem formulation Iterative
Quantitative Feedback Theory based Controller Design of an Unstable System
 Quantitative Feedback Theory based Controller Design of an Unstable System Chandrima Roy Department of E.C.E, Assistant Professor Heritage Institute of Technology, Kolkata, WB Kalyankumar Datta Department
Quantitative Feedback Theory based Controller Design of an Unstable System Chandrima Roy Department of E.C.E, Assistant Professor Heritage Institute of Technology, Kolkata, WB Kalyankumar Datta Department
Feedback Control CONTROL THEORY FUNDAMENTALS. Feedback Control: A History. Feedback Control: A History (contd.) Anuradha Annaswamy
 Anuradha Annaswamy") Feedback Control CONTROL THEORY FUNDAMENTALS Actuator Sensor + Anuradha Annaswamy Active adaptive Control Laboratory Massachusetts Institute of Technology must follow with» Speed» Accuracy Feeback: Measure
Feedback Control CONTROL THEORY FUNDAMENTALS Actuator Sensor + Anuradha Annaswamy Active adaptive Control Laboratory Massachusetts Institute of Technology must follow with» Speed» Accuracy Feeback: Measure
Robust Control for Robot Manipulators By Using Only Joint Position Measurements
 Proceedings of the 29 IEEE International Conference on Systems, Man, and Cybernetics San Antonio, TX, USA - October 29 Robust Control for Robot Manipulators By Using Only Joint Position Measurements Shafiqul
Proceedings of the 29 IEEE International Conference on Systems, Man, and Cybernetics San Antonio, TX, USA - October 29 Robust Control for Robot Manipulators By Using Only Joint Position Measurements Shafiqul
Plan of the Lecture. Review: stability; Routh Hurwitz criterion Today s topic: basic properties and benefits of feedback control
 Plan of the Lecture Review: stability; Routh Hurwitz criterion Today s topic: basic properties and benefits of feedback control Plan of the Lecture Review: stability; Routh Hurwitz criterion Today s topic:
Plan of the Lecture Review: stability; Routh Hurwitz criterion Today s topic: basic properties and benefits of feedback control Plan of the Lecture Review: stability; Routh Hurwitz criterion Today s topic:
Review: stability; Routh Hurwitz criterion Today s topic: basic properties and benefits of feedback control
 Plan of the Lecture Review: stability; Routh Hurwitz criterion Today s topic: basic properties and benefits of feedback control Goal: understand the difference between open-loop and closed-loop (feedback)
Plan of the Lecture Review: stability; Routh Hurwitz criterion Today s topic: basic properties and benefits of feedback control Goal: understand the difference between open-loop and closed-loop (feedback)
H-infinity Model Reference Controller Design for Magnetic Levitation System
 H.I. Ali Control and Systems Engineering Department, University of Technology Baghdad, Iraq 6043@uotechnology.edu.iq H-infinity Model Reference Controller Design for Magnetic Levitation System Abstract-
H.I. Ali Control and Systems Engineering Department, University of Technology Baghdad, Iraq 6043@uotechnology.edu.iq H-infinity Model Reference Controller Design for Magnetic Levitation System Abstract-
Introduction to Feedback Control
 Introduction to Feedback Control Control System Design Why Control? Open-Loop vs Closed-Loop (Feedback) Why Use Feedback Control? Closed-Loop Control System Structure Elements of a Feedback Control System
Introduction to Feedback Control Control System Design Why Control? Open-Loop vs Closed-Loop (Feedback) Why Use Feedback Control? Closed-Loop Control System Structure Elements of a Feedback Control System
Introduction to Root Locus. What is root locus?
 Introduction to Root Locus What is root locus? A graphical representation of the closed loop poles as a system parameter (Gain K) is varied Method of analysis and design for stability and transient response
Introduction to Root Locus What is root locus? A graphical representation of the closed loop poles as a system parameter (Gain K) is varied Method of analysis and design for stability and transient response
ECE317 : Feedback and Control
 ECE317 : Feedback and Control Lecture : Steady-state error Dr. Richard Tymerski Dept. of Electrical and Computer Engineering Portland State University 1 Course roadmap Modeling Analysis Design Laplace
ECE317 : Feedback and Control Lecture : Steady-state error Dr. Richard Tymerski Dept. of Electrical and Computer Engineering Portland State University 1 Course roadmap Modeling Analysis Design Laplace
The Rationale for Second Level Adaptation
 The Rationale for Second Level Adaptation Kumpati S. Narendra, Yu Wang and Wei Chen Center for Systems Science, Yale University arxiv:1510.04989v1 [cs.sy] 16 Oct 2015 Abstract Recently, a new approach
The Rationale for Second Level Adaptation Kumpati S. Narendra, Yu Wang and Wei Chen Center for Systems Science, Yale University arxiv:1510.04989v1 [cs.sy] 16 Oct 2015 Abstract Recently, a new approach
Chapter Robust Performance and Introduction to the Structured Singular Value Function Introduction As discussed in Lecture 0, a process is better desc
 Lectures on Dynamic Systems and Control Mohammed Dahleh Munther A Dahleh George Verghese Department of Electrical Engineering and Computer Science Massachuasetts Institute of Technology c Chapter Robust
Lectures on Dynamic Systems and Control Mohammed Dahleh Munther A Dahleh George Verghese Department of Electrical Engineering and Computer Science Massachuasetts Institute of Technology c Chapter Robust
Feedback Control of Linear SISO systems. Process Dynamics and Control
 Feedback Control of Linear SISO systems Process Dynamics and Control 1 Open-Loop Process The study of dynamics was limited to open-loop systems Observe process behavior as a result of specific input signals
Feedback Control of Linear SISO systems Process Dynamics and Control 1 Open-Loop Process The study of dynamics was limited to open-loop systems Observe process behavior as a result of specific input signals
Closed-loop system 2/1/2016. Generally MIMO case. Two-degrees-of-freedom (2 DOF) control structure. (2 DOF structure) The closed loop equations become
 control structure. (2 DOF structure) The closed loop equations become") Closed-loop system enerally MIMO case Two-degrees-of-freedom (2 DOF) control structure (2 DOF structure) 2 The closed loop equations become solving for z gives where is the closed loop transfer function
Closed-loop system enerally MIMO case Two-degrees-of-freedom (2 DOF) control structure (2 DOF structure) 2 The closed loop equations become solving for z gives where is the closed loop transfer function
MRAGPC Control of MIMO Processes with Input Constraints and Disturbance
 Proceedings of the World Congress on Engineering and Computer Science 9 Vol II WCECS 9, October -, 9, San Francisco, USA MRAGPC Control of MIMO Processes with Input Constraints and Disturbance A. S. Osunleke,
Proceedings of the World Congress on Engineering and Computer Science 9 Vol II WCECS 9, October -, 9, San Francisco, USA MRAGPC Control of MIMO Processes with Input Constraints and Disturbance A. S. Osunleke,
3.1 Overview 3.2 Process and control-loop interactions
 3. Multivariable 3.1 Overview 3.2 and control-loop interactions 3.2.1 Interaction analysis 3.2.2 Closed-loop stability 3.3 Decoupling control 3.3.1 Basic design principle 3.3.2 Complete decoupling 3.3.3
3. Multivariable 3.1 Overview 3.2 and control-loop interactions 3.2.1 Interaction analysis 3.2.2 Closed-loop stability 3.3 Decoupling control 3.3.1 Basic design principle 3.3.2 Complete decoupling 3.3.3
Fixed Order H Controller for Quarter Car Active Suspension System
 Fixed Order H Controller for Quarter Car Active Suspension System B. Erol, A. Delibaşı Abstract This paper presents an LMI based fixed-order controller design for quarter car active suspension system in
Fixed Order H Controller for Quarter Car Active Suspension System B. Erol, A. Delibaşı Abstract This paper presents an LMI based fixed-order controller design for quarter car active suspension system in
Control Systems Design
 ELEC4410 Control Systems Design Lecture 18: State Feedback Tracking and State Estimation Julio H. Braslavsky julio@ee.newcastle.edu.au School of Electrical Engineering and Computer Science Lecture 18:
ELEC4410 Control Systems Design Lecture 18: State Feedback Tracking and State Estimation Julio H. Braslavsky julio@ee.newcastle.edu.au School of Electrical Engineering and Computer Science Lecture 18:
LQG/LTR ROBUST CONTROL SYSTEM DESIGN FOR A LOW-PRESSURE FEEDWATER HEATER TRAIN. G. V. Murphy J. M. Bailey The University of Tennessee, Knoxville"
 LQG/LTR ROBUST CONTROL SYSTEM DESIGN FOR A LOW-PRESSURE FEEDWATER HEATER TRAIN G. V. Murphy J. M. Bailey The University of Tennessee, Knoxville" CONF-900464 3 DE90 006144 Abstract This paper uses the linear
LQG/LTR ROBUST CONTROL SYSTEM DESIGN FOR A LOW-PRESSURE FEEDWATER HEATER TRAIN G. V. Murphy J. M. Bailey The University of Tennessee, Knoxville" CONF-900464 3 DE90 006144 Abstract This paper uses the linear
A design method for two-degree-of-freedom multi-period repetitive controllers for multiple-input/multiple-output systems
 A design method for two-degree-of-freedom multi-period repetitive controllers for multiple-input/multiple-output systems Zhongxiang Chen Kou Yamada Tatsuya Sakanushi Iwanori Murakami Yoshinori Ando Nhan
A design method for two-degree-of-freedom multi-period repetitive controllers for multiple-input/multiple-output systems Zhongxiang Chen Kou Yamada Tatsuya Sakanushi Iwanori Murakami Yoshinori Ando Nhan
06 Feedback Control System Characteristics The role of error signals to characterize feedback control system performance.
 Chapter 06 Feedback 06 Feedback Control System Characteristics The role of error signals to characterize feedback control system performance. Lesson of the Course Fondamenti di Controlli Automatici of
Chapter 06 Feedback 06 Feedback Control System Characteristics The role of error signals to characterize feedback control system performance. Lesson of the Course Fondamenti di Controlli Automatici of
THE DESIGN OF ACTIVE CONTROLLER FOR THE OUTPUT REGULATION OF LIU-LIU-LIU-SU CHAOTIC SYSTEM
 THE DESIGN OF ACTIVE CONTROLLER FOR THE OUTPUT REGULATION OF LIU-LIU-LIU-SU CHAOTIC SYSTEM Sundarapandian Vaidyanathan 1 1 Research and Development Centre, Vel Tech Dr. RR & Dr. SR Technical University
THE DESIGN OF ACTIVE CONTROLLER FOR THE OUTPUT REGULATION OF LIU-LIU-LIU-SU CHAOTIC SYSTEM Sundarapandian Vaidyanathan 1 1 Research and Development Centre, Vel Tech Dr. RR & Dr. SR Technical University