Motion Detection and Tracking by Autonomous Mobile robot in Indoor Environment
|
|
|
- Sarah Stone
- 5 years ago
- Views:
Transcription
1 Jona of Eea Enneen Moon Deeon an Tan by Aonoos Mobe obo n Inoo Enonen Zehahe SAMIR Razbaoene A Mohan Saï DJOUADI Laboaoe oboqe & poqe Eoe ae poyehnqe Bp : 7 Boj E Bah 6 Ae Aée. zehahe_sa@yahoo.f aaz56@yahoo.f sjoa@a.o Absa In hs en wo we ae onene wh he obs eeon of on objes n eos aen fo an obe obo. The an as s o opensae he oon of he obsee by esan he Hooaphy beween wo sesse faes an ee he nepenen oon of he on on ae n he ae. To eene he 3-D poson of he ae sn he seeoson an appe he assa onoe o a he ae (han) fnay we e soe ess of o een aohs n he noo enonen sn he fas fae ffeenn eho. Ths es shows he effeeness of he son syse. Keywos obe obo seeoson son base ono oon eeon an paa fen I. ITRODUCTIO In he een yeas effos hae been ae o e aonoy o a sne obe obo by sn ffeen sensos o oe nfoaon fo he sonns an ea o he hanes of s eae enonen. Cope son s one of he os popa peepon sensos epoye fo aonoos obos. In any as sh seane an aspn sa pah an sa an of a on obje. The appaon of son base an ono esn fo obo appaon has been an ae aea of obo eseah n he wo papes [] [] pesen sy of he sa seon appoahes o an ono of nonhoono obe obos n [3] pesen sy of sa naaon obe obos hs wo sbe no he sa naaon n noo enonen an he sa naaon n ooo enonen. A eho an saon of he exaon he son aa n oe o aow a obo o opeae n a a nown an yna enonen n [4] he ahos hae pesene a sonbase shee fo n a non-hoono obe obo o neep a on ae on he owe ee he pan- pafo whh aes he on-boa aea s onoe so as o eep he ae a he ene of he ae pane. On he hhe ee he obo opeaes ne he asspon ha he aea syse ahees pefe an. In paa he eae poson of he ba s eee fo he pan/ anes hoh spe eoey an se o ope a ono aw n he obo o he ae. Vaos possbe hoes ae ssse fo he hh-ee obo onoe. In [5] he obs sa an onoe s popose fo an ono of a obe obo n ae pan hs wo base on he popose eo-sae oe he sa an ono pobe s ansfoe no he saby pobe. The obs ono aw s hen popose o aanee ha he sa an syse sasfes he neessay saby onon base on LYAPUOV heoy. In [6] esbe he poson ono of aonoos obe obo sn obnaon of aan fe an fzzy o ehnqe. Boh ehnqes hae been se o fse nfoaon fo nena an exena sensos o naae he obe obo n nnown enonen. An obsae aoane aoh sn seeoson ehnqe has been peene fo obsae eeon. In [7] pesene a saey fo a nonhoono obe obo o aonoosy foow a ae base on son nfoaon fo an onboa pan aea n. Hooaphy-base ehnqes ae se o oban eae poson an oenaon nfoaon fo he onoa aea aes. The popose nea onoe base on he Lyapno eho ahees nfo aey bone an. In [8] an [9] he ahos hae popose he sae feeba ono sn he fzzy o onoe o eaze a eae an foowe obe obo base he ase an nfae sensos. Tan a on on objes n aea eo has a aey of ea wo appaons an pesens a ajo nees fo he an an ay ones. These ne aea eonon eoe seane aff onon. Deen oon of exena objes fo a on obo s he sbje of ae eseah [345] Ths s a haenn as as ae szes ae sa an hey s be aqe an ae hoh hann enonen. We popose an effeny enneee syse whh eaby oaes an as obje by sn a oa appoah. The appoah noes fo oes whh ne: - Feaes eeon an an - Eo oon esaon - Feaes seeon. - Robse Inépenan oon éeon - D Tae Loazaon by pae fe - The onoa son base an ono sffes o oban he 3D ae poson. Howee n hs pape he seeoson syse has been se o soe hs pobe we an a eah nsan hae a pa of aes fo wo eoea efne aeas ha aow s o hae fo ae oonaes. The anaon eqaon s se o esae he eae 3D poson (ae-ae). We wan o exane he ae oon eeon an an sn he nonhoono obe obo by easn he eon an he eph of he ae. Fs we w esbe he neaa oe of a obe obo (Seon II) an he aea oe (seon III) seon IV pesen feae eeon an an seon V we pesen he eo oon esaon seon VI
2 Jona of Eea Enneen we pesen he eo oon esaon seon VI pesen he feae seeon seon VII pesen he nepenen oon ee seon VIII pesen he ae an sn he paa fe seon XI pesen he 3D ae oasaon he anaon eqaons an he paaees of he aeas seon X pesens he obe obo s sa ono eeopen. Fnay we ae o he onson of he whoe wo. II. MOBILE ROBOT MODEL In hs wo s onsee he nye obe obo he naaon s onoe by he spee on ehe se of he obo. Ths n of obo has nonhoono onsans whh sho be onsee n pah pannn. The neaa shee of a obe obo an be epe as n F. whee s he eoy of he obo s he eoy of he ef whee s he eoy of he h whee s he as of eah whee s he sane beween he ef an he h whees x an y ae he poson of he obe obo an φ s he oenaon of he obo. Ths ype of obo an be esbe by he foown neas eqaons: x& os θ y& sn θ & θ ω The non-hoono eson fo oe () s () y & os θ x& sn θ () Aon o he oon pnpe of boy neas he oon of a obe obo an be esbe sn eqaons () an () whee ω an ω ae he ana eoes of he ef an h whees espeey an ω s he ana eoy. The ef an a h eoy of obo: ω. ω ω. (3). Cobnn () wh (3) we an oban: ω ( ω ω ) ( ω ω ) + (4) (5) III. CAMERA MODEL Cabaon s a heay woe on aea n son bease s neessay o esae 3D sane nfoaon onane n an ae. I aows o oe aheaay he eaonshp beween he 3D oonaes of an obje n a sene an s D oonaes n he ae [6]. The paaees of he aea ae assfe n wo aeoes nena paaees whh efne he popees of he eoea ops an he exena paaees whh efne poson an oenaon of he aea. Moe spefay he aea abaon onsss of eenn he nns paaees an he exns paaees [78]. The oe of he aea s pesene n f.. Y F F.. Caea oee A. Inns paaees Inns paaees of he aea efne he sae faos an he ae ene. I A Iae fae α α α f K α f K K K epesen he hozona an ea sae fao f epesen he foa enh an epesen he ae ene. B. Exns paaees Caea fae X M I b Z Whh efne he hooenos ansfoaon fo he wo o he aea fae en by he ax A. X Z Wo fae B Y (6) Y y ω A x y R z T (7) X x F.. Geoe espon of he obe obo
3 Jona of Eea Enneen The ax A s a obnaon of oaon ax R an ansaon ax T fo o he wo fae o he aea fae. The ansfoaon fo he wo o he ae fae s en by he ax M. We an we: M I A (8) s s s X Y Z In hs eqaon (XYZ) ae he oonaes of a pon B n he wo fae an () ae he ae oonae of he pojee pon B. IV. FEATURES DETECTIO AD TRACKIG The feaes fon an ae by hs aoh ae he Haas ones [9]. We hae aso peen he ehnqe of he Goo Feaes o Ta eeope by []. These wo eeos ae base on he oeaon ax opaon C w n he wnow w of he whoe ae. The feaes ( x y) I ( x y) (9) I w x w x y C w () I ( x y) I ( x y) w x y w y f fon sn one eeon aoh n he ae I - ae se o esae eo-oon. Howee one hese feaes ae eee hey ae ae sn a pyaa peenaon of he Las Kanae opa fow eho [] o fn he oesponn feaes f oaon ( ) n he ae I. The oa of feae an s o nze he esa fnon ε efne as foows: w w [ ] x y + ε ( ) I ( x + p y + q) I ( x + p + y + q + ) () p wx q wy Ths aoh has wo ajo poan benefs: - Robs o fay ae spaeen e o he pyaa se. - Fase han a sana opa fow bease bens o poess he sa ae han he be. The eeon-an of he feae ae one beween wo sesse aes. V. EGO MOTIO ESTIMATIO We hae se wo ffeen oes affne en by eq () an pespee oes en by eq (3). Fo he fs one he opensaon of hann sae fao was possbe; on he ohe han by sn he seon ansfoaon we wee abe o opensae hs hane. x h h h3 x s y h h h3 y () x h h h3 x s y h h h3 y (3) h3 h3 One he ahn beween feaes (f - f ) s one he paaees h j of he ansfoaon oe s esan by eas sqae o SVD eho. The Leenbe-Maqa an eae Gass-ewon opsaon ae se fo he non-nea ansfoaon []. eeheess ha ehnqe o be base [3] when () he eho an ea nehe wh oes (sahe pons) no wh non senes (senes ha onan boh sa an on objes) an () he eho nzes an aeba sane an hene es poo ess fo bay onone aa. F.3. pesens he wapn ess (be qaane) by appyn he pespee ansfoaon. The ba eane epesens he fs ae befoe wapn an he be one epesen he wape ae. y x (a) (b) () () F.3. The an ae-o-ae hooaphy ansfoaon: (a) hozona nea sae fao hann (b) hozona an ea ansaon () oaon () onsan sae fao hann +oaon. Theefoe o oon esaon shee s be obs enoh o esae he oe oon. Fo he expeens epoe n hs pape he oe of he Hooaphy s epesene by 3x3 ax efne p o a sae fao. Ths Hooaphy H (pana ansfoaon) pefos a feae o feae appn beween he hooeneos oonaes of he ae x x sh ha x H x F.4. shows he aay an eee of feeo of he eooon hann. Ths ansfoaon beween wo aes panes has eh eees of feeo (h 33 ) hene an opensae a oo nbe of a aea oon. Fo feaes pons eeon we hae a syse of nea eqaons: 3
4 Jona of Eea Enneen x y xx x y x x y yx yy y f M h M x y xx x y x x y yx yy y f A ( ) x9 h9x () x ( h h h h h h h h h ) T h (4) Wh (x y ) ae he fs oonae of he feae n he ae I(-) an (x y ) he oonae of ae feae n he ae I() s he oa nbe of feaes. A eas he esaon of H eqes fo bes feaes o soe () n he nex seon we w esbe he anne o see he. Eo-oon aay + eee of feeo Eean Hooaphy of Affne Hooaphy 6 of Pespee Hooaphy 8 of F. 4. Aay neases wh he opexy of he ansfoaon oe. VI. FEATURES SELECTIO The opa ansfoaon onans nheen eo sne soe of he feae oesponenes se o esae he ansfoaon e on on objes wh oon nepenen fo he aea. Those feaes (oes) sho be enae fo he feae se befoe he fna Hoaphy s ope we appy:. Cope he na Hooaphy sn he f feae se S. Appy he foown ea : f S n f ( H ) f ε (5) f S o ohewse Re-ope he new Hooaphy sn ony he se S Fo he paone feaes se we pan he se S n by een an S o by e. TABLE I (a) Theefoe he eo-oon of he ehe an be e-esae aaey an obsy by sn hs seeon eho. Ohe obs seeon ehnqes ae nesae o fe o ahn oes. A aan of eas-ean-sqae (LMeS) [4] an ano sape onsenss (RASAC) [ 3] boh eho ae base on he oe ejeon saey. Moe espon of hese aohs an be fon n [4]. VII. IDEPEDET MOTIO DETECT To ee oon of he on ae sh as as s he syse ses he fas fae ffeenn eho. Iae I(-) s onee sn he Hooaphy befoe ben sbae by he ae I().so fo eah pxe (x y): I op ( x y ) I ( H ( x y )) (6) The ffeene ae beween wo onsee faes s pefoe by: I x y I x y I x y (7) ff ( ) ( ) op ( ) In eay he es ae I ff s nosy by a sa-an-peppe nose n oe o enae aes ae onon wh 3x3 Gassan as. VIII. TARGET TRACKIG USIG THE PARTICLE FILTER The an feae of Pae Fe s Bayesan nfeene whh esey esaes a poseo ensy of he obje s sae: ( X I ) P( I X ) P( X I ) P (8) ff ff Whee P ( I ff X ) s he ehoo an P ( X I ) s he po ff ensy ee fo peos poseo ensy ( ) P X I ff an a ynaa oe P ( X X ) ( X I ) P( X X ) P( X I ) X P ff ff (9) The pae fe eneae a se of wehe paes a e { s π }.. whee s epesens he h obseaon (en by eq. ) of he obje sae a e π s he pobaby (he poane weh) fo s o be he on obje an s he ax nbe of paes. s x y x& y& () [ ] T The oon oe s efne as: x x + T x& s y y + Ts y& x& x& y& y& Whee T s s a e nea. ff () / n/ ( ) I ff x y j n () / j n/ The n as sho be b enoh so ha sa-anpeppe nose s enae. π exp σ (3) As shown n eq () an (3) ony he poson nfoaon of he oon aa s se o eaae paes. A oe of hese fos a esn aabe: σ. he hoe of hese aabes eenes he sensy of he fe o he easeens. The sapes of he paae fe ae 4
![Jona of Eea Enneen www.jee.o pesene n ab F 5 shows he op of he pae fe n noo enonen. ( z ) ( ) ( ) ( ) ( ) [{ w }] Conensaon [{ x w }] x //- Inazaon -//. f (Inazaon) han () ( ). o sape s.](/docs-images/89/100593547/images/5-0.jpg ".. s aon o P ( S ) ( an o pose w )... 3. en f //- Popaaon an wehn-// 4. f han 5. fo... o ( ) 6. o popaae he pae s whe aan : ( ) ( ) s P s s ( ) () 7.")
5 Jona of Eea Enneen pesene n ab F 5 shows he op of he pae fe n noo enonen. ( z ) ( ) ( ) ( ) ( ) [{ w }] Conensaon [{ x w }] x //- Inazaon -//. f (Inazaon) han () ( ). o sape s... s aon o P ( S ) ( an o pose w ) en f //- Popaaon an wehn-// 4. f han 5. fo... o ( ) 6. o popaae he pae s whe aan : ( ) ( ) s P s s ( ) () 7. o pae he weh w aon o he eqaon : ( ) ( ) ( ) w w P Z s 8. en fo ( ) Befoe of he sep ensn he noazaon ( )... w //- Ré-éhanonae -// 9. Ré-éhanonne { } ( ) ( ) w ( ~ ( ) ( ) ( ) P s s ) w s aon o wha eas o he oehe of baane paes ~ ( s ) ( ) ( ) sh as ( ) w δ s s an affee. Fn S ( ) δ ( s ~ s ) appoxae ( s z ) () x e () w ae ~ ( ) x e Tabe paa fe aoh P ;... F 5 Pae fe an: The posons of paes ae epesene by sa een os an he Yeow Coss shows he h poson of he on ae. IX. 3D TARGET LOCALIZATIO Deph aaes fo a pa of seeosop aes s neessay o fn he ahe oesponn pons beween he ef an h aes. A. MATCHED CORRESPODIG The oa s o p n oesponene wo pxes D (h-han se an ef) oesponn o he sae pon 3D. To aanee oo pefoanes he efaon an oeon of he soons ae essena fo a an no aon of he hozona eppoa nes. We pesen n hs pa he ea o be peene o ee ha pa of pes ef/h s oe o no. We w eeop hee ypes of onsans. In he fs onsan hey w be he eppoa onsans. A seon ype of onsans w enabe s o aae opaby beween wo pans sasfyn he fs ype of onsans. They ae he onsans of oe an ny. An he as ype of onsan s he onsan of ax spay. The F 6 saes we he poess aope fo pan. The oesponen of a pxe ( ) L Y L an a pxe ( X Y Y ) X n he efe ef ae R R L ben on he sae ne (eppoa onsan) n he efe h ae. The ae of he oponen X R s fon by aan he aes of oeaon (eq 4) on he sae hozona ne eppoa ( Y ) L Y R ee by X L + DMAX an X L whh ae he pxe of a pon ben on a ax sane fo he seeosop benh an he pxe n he ef ae. ZCC( P P ) wy wy [ I ( x + y + j) I ( x y )] [ I ( x + y + j) I ( x y )] wx j wx wy wy wy wy [ I ( x + y + j) I ( x y )] [ I ( x + y + j) I ( x y )] wx j wx (a) Inoo enonneen wx j wx (4) One he aes of oeaon ae aae by sn (eq 4) we fxes a hesho an we eo he aes of he pxes X R whose oeaon s hhe han he fxe hesho. Fnay he pon oesponn X R s aae by an he aeae. 5
6 Jona of Eea Enneen Y V Refe ef ae U Eppoa ne Refe h ae U L V L x 3 y 3 x 3 y 3 x y x y 3 3 x 33 4 x 34 X y y Y (6) 3 x 33 4 y 34 Z y y 34 The syse of eqaon (6) an be ewen n he fo: X L Coeaon ae X L+ D MAX X R X L Thesho E P W (7) We an soe he eqaon (7) sn he eas sqaes eho: P E E E (8) ( ) W X L+ D MAX F 6 The pnpe of ahe oepenn B. TRIAGULATIO If we paes n he ase of he hee ensona P x y of he ef ae a ebn an f he pon ( ) se p n oesponene wh he pon ( x y ) he h ae sn he eq (9) we hae: X R X + Y + Z x 3 X + 3 Y + 33 Z + 34 X + Y + Z y X + Y + Z X + Y + 3 Z + 4 x 3 X + 3 Y + 33 Z + 34 X + Y + Z y X + Y + Z Iae pane (L) ( x y ) P b Z R X ( ) P X Y Z F.7. eoey of he seeosop aea ( x y ) P X L P of Y Iae pane (R) (5) We an aso eb he pon P n he ef aea fae sn he nns paaees ax of he ef an h aea I I. The oonaes X Y an Z of he pon P ae en by [5]: Wh: b Z y y X x Z Y y Z x y I x y an x y I x y (9) b By an a ansaon aon he Y by he 3D oonae of he ae ene an be aae n he fae oae beween he wo aea ef an h as s shown n f.7. Ths he eqaon (9) beoes: b Z y y X x Z (3) b Y y Z Ths we an aae he sane whh sepaaes he obe obo an he ae whh ae en by he foown eqaon: Y + Z The ane of eaon s en by: (3) y ϕ an (3) Z The oonae XY an Z of he pon P eb n he abaon fae ae aae by son a nea syse of fo eqaons. The eqaon (5) an be wen by: 6
 Iae() Copensaon Pae fe Cassa popoona onoe The ono aw popose s efne as foows: The fowa eoy s aae by: ( ) (9) Feaes Seeon Feae an Hooaphy esaon H Mahe oesponn 3DTae poson esaon Dsane")
 The esn ose-oop syse s hen esbe by he foown eqaon: x& y& & φ ϕ ( ) ( ) os φ sn φ (3) X.")
7 Jona of Eea Enneen Lef ae Rh ae wnows XP opean syse. I opeae n ea-e wh a aaon peo of (.8-.9s). Feae eeon Iae(-) Iae() Copensaon Pae fe Cassa popoona onoe The ono aw popose s efne as foows: The fowa eoy s aae by: ( ) (9) Feaes Seeon Feae an Hooaphy esaon H Mahe oesponn 3DTae poson esaon Dsane an oenaon of he ae F 8. Goba Mon han eeon an oazaon aoh. Is he ese sane beween he eae an he foowe obe obo. The ana eoy s popoona o ϕ ane: ω ϕ (3) The esn ose-oop syse s hen esbe by he foown eqaon: x& y& & φ ϕ ( ) ( ) os φ sn φ (3) X. VISUAL COTROL OF THE MOBILE ROBOT In hs seon we esbe he fo ffeen obo onoes ha hae been neae n o an ono he foown fe sae he ase of o appaon X Caea fae R C Iae Pojeon ( X Y Z ) P ϕ Y X C Y C f Z C Z X B R B Z B F Ponee 3AT obe obo se n o Expeenaons. Y B Robo fae F 9. Paeen he faes of he obe obo eqppe wh a seeosop aea A. Copee syse esn an hawae One Ponee wheee obo was se n o expeen we one a Bbebee seeosop aea whh was opeae a a esoon of 3 4 pxes an onans ebee ope wh a CPU of.6 GHZ he syse was peene n C++ wh he openc bay of ae poessn [6] an he ARIA sofwae eeopen enonen [7] nnn n 7


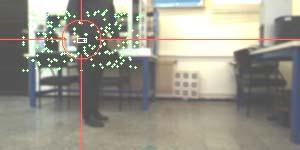

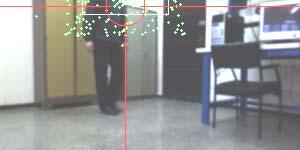
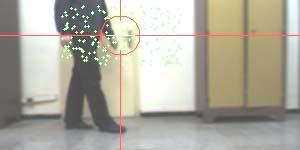




8 Jona of Eea Enneen EXPERIMETAL RESULTS F Mon obje an fo obe obo n noo enonen 3 4 8
 he ono")
 he poson of eah pae s ae wh een os an se as on h. F 5 shows hs eaaon poess he poess of an he peson n he noo enonen s shown n f ().")
9 Jona of Eea Enneen F Snapshos of a ponee3at obo foown a han XI Dssson an onson To sae he effeny of he popose an onoe we noe ha he eae sane beween he ae an he foowe obo s anane onsan wh he ese sane () he ono aons sh as he nea an he ana eoes ae aae by o assa onoe an sen o he foowe obo. The pefoane of he an aoh was eaae by opan wh he posons of anay ae objes. Fo eah seqene of faes he eon of on objes wee ae anay (Yeow oss) he poson of eah pae s ae wh een os an se as on h. F 5 shows hs eaaon poess he poess of an he peson n he noo enonen s shown n f (). The fe shows The snapshos of he obo foown a peson sessfy n he sa an. Bboaphy [] D. Bsha J. Gean an G. Hae Opa ana onfaon fo son-base ono of obe obo Poeens of he 3 IEEE Inenaona Confeene on Rob. an Ao. Tape Tawan 3. []. J. Cowan an D. E. Koshe Pana ae base sa seon as a naaon pobe Poeens of he 999 IEEE Inenaona Confeene. Conf. on Rob. an Ao. Deo Mhan 999. [3] G.. DeSoza an A. C. Ka Vson fo Mobe Robo aaon: A Sey IEEE TRASACTIOS O PATTER AALYSIS AD MACHIE ITELLIGECE VOL. 4 O. FEBRUARY. [4] L. Fea an G.Ooo Vson base neepon of a on ae wh a nonhoono obe obo Sene e on Robos an Aonoos Syses 55 (7) [5] C. Tsa K.Son Robs sa an ono of obe Robo Base an eo oe n Iae Pane Poeens of he 5 IEEE Inenaona Confeene on Mehaons & Aoaon Jy Ap 5. [6] R. Chooan &. Afzpa Hyb Kaan Fe/Fzzy Lo base Poson Cono of Aonoos Mobe Robo Inenaona Jona of Aane Robo Syses Voe be 3 (5) ISS [7] H. Kannan V.Chaaan D. M. Dawson an T. B Vson-base Leae/Foowe an fo onhoono obe obos Poeens of he 7 Aean ono onfeene ew Yo Cy USA Jy -3 7 [8] T. S. L S.J Chan an We Ton Fzzy Tae Tan Cono of Aonoos Mobe Robos by Usn Infae Sensos IEEE TRASACTIOS O FUZZY SYSTEMS VOL. O. 4 AUGUST 4 [9] M. Sso D. G A Fzzy Leae-Foowe Appoah o Foaon Cono of Mpe Mobe Robos Poeens of he 6 IEEE/RSJ Inenaona Confeene on Ineen Robos an Syses Oobe Bejn Chna. 9
10 Jona of Eea Enneen [] Boyoon Jn an Gaa S. Shae Deen Mon Objes sn Sne Caea on a Mobe Robo n an Ooo Eneen n he 5 h Confeene on Ineen Aonoos Syses pp aseathe eheansmash [] Janjan Xao Chanjan Yan Fen Han an H Chen Vehe an Peson Tan n UAV Veos"7. [] Géa Meon Isaa Cohen Fanos Beon Soboon Honen an Raaan eaa Een Deeon an Anayss fo Veo Seas IEEE TRASACTIOS O PATTER AALYSIS AD MACHIE ITELLIGECE VOL. 3 O. 8 AUGUST [3] En-Yon Kan Isaa Cohen an Géa Meon Robs Affne Moon Esaon n Jon Iae Spae sn Tenso Von Inenaona Confeene on Paen Reonon Qebe Cy Canaa As [4]Isaa Cohen an Géa Meon Deen an Tan Mon Objes fo Veo Seane IEEE Po. Cope Vson an Paen Reonon Jn Fo Cons CO. [5]Jnan Kan Isaa Cohen G ea Meon Chan Yan Deeon an Tan of Mon Objes fo a Mon Pafo n Pesene of Son Paaax Poeens of he IEEE Inenaona Confeene on Cope Vson ICCV'5 Bejn Chna. Oobe 7-5. n an Ooo Eneen n he 5 h Confeene on Ineen Aonoos Syses pp aseathe eheansmash [3] Da Dejan an Ra Hoa Moon Eooon Dsnaon an Moon Seenaon fo Iae-Pa Seas Cope Vson an Iae Unesann () aaabe onne a hp:// [4] P. Mee D. Mnz A. Rosenfe an D. Y. K Robs eesson ehos fo ope son: A eew In. J. Cop. Vson 6() [5] R Hoa e Oe Mona Vson Pa Onae Eon Heès exee Eon Fane 995. [6] Use e of he OpenC bay hp://openbay.soefo.ne [7] Ae ea [8] K. M.Passno Fzzy ono Depaeen of Eea Enneen he oho sae nesy 998 [6] TRUCCO E. VERRI A. Inooy ehnqes fo 3-D ope son hape 6 Pene Ha 998. [7] TOSCAI G. Sysèe e Cabaon e peepon oeen en son afee Ph.D. Thess - Unesé Pas S 5 e [8] LEZ R. K. an TSAI R. Y. Tehnqe fo abaon of sae fao an ae ene fo hh aay 3D ahne son eooe. IEEE Tansaons on Paen Anayss an Mahne Ineene 988. [9] C. Has an M. Sephens A obne one an ee eeo n Poeens Aey Confeene Manhese UK As 988 pp [] Janbo Sh an Cao Toas Goo Feaes o Ta IEEE Confeene on Cope Vson an Paen Reonon CVPR94 Seae Jne 994. [] B. D. Las an T. Kanae An eae ae esaon ehnqe wh an appaon o seeo son IJCAI 98. [] Boyoon Jn an Gaa S. Shae Deen Mon Objes sn Sne Caea on a Mobe Robo
The sound field of moving sources
 Nose Engneeng / Aoss -- ong Soes The son el o mong soes ong pon soes The pesse el geneae by pon soe o geneal me an The pess T poson I he soe s onenae a he sngle mong pon, soe may I he soe s I be wen as
Nose Engneeng / Aoss -- ong Soes The son el o mong soes ong pon soes The pesse el geneae by pon soe o geneal me an The pess T poson I he soe s onenae a he sngle mong pon, soe may I he soe s I be wen as
-HYBRID LAPLACE TRANSFORM AND APPLICATIONS TO MULTIDIMENSIONAL HYBRID SYSTEMS. PART II: DETERMINING THE ORIGINAL
 UPB Sc B See A Vo 72 I 3 2 ISSN 223-727 MUTIPE -HYBRID APACE TRANSORM AND APPICATIONS TO MUTIDIMENSIONA HYBRID SYSTEMS PART II: DETERMININ THE ORIINA Ve PREPEIŢĂ Te VASIACHE 2 Ace co copeeă oă - pce he
UPB Sc B See A Vo 72 I 3 2 ISSN 223-727 MUTIPE -HYBRID APACE TRANSORM AND APPICATIONS TO MUTIDIMENSIONA HYBRID SYSTEMS PART II: DETERMININ THE ORIINA Ve PREPEIŢĂ Te VASIACHE 2 Ace co copeeă oă - pce he
Chapter 5. Long Waves
 ape 5. Lo Waes Wae e s o compaed ae dep: < < L π Fom ea ae eo o s s ; amos ozoa moo z p s ; dosac pesse Dep-aeaed coseao o mass
ape 5. Lo Waes Wae e s o compaed ae dep: < < L π Fom ea ae eo o s s ; amos ozoa moo z p s ; dosac pesse Dep-aeaed coseao o mass
Hyperbolic Heat Equation as Mathematical Model for Steel Quenching of L-shape and T-shape Samples, Direct and Inverse Problems
 SEAS RANSACIONS o HEA MASS RANSER Bos M Be As Bs Hpeo He Eo s Me Moe o See Qe o L-spe -spe Spes De Iese Poes ABIA BOBINSKA o Pss Mes es o L Ze See 8 L R LAIA e@o MARARIA BIKE ANDRIS BIKIS Ise o Mes Cope
SEAS RANSACIONS o HEA MASS RANSER Bos M Be As Bs Hpeo He Eo s Me Moe o See Qe o L-spe -spe Spes De Iese Poes ABIA BOBINSKA o Pss Mes es o L Ze See 8 L R LAIA e@o MARARIA BIKE ANDRIS BIKIS Ise o Mes Cope
An Optimization Model for Empty Container Reposition under Uncertainty
 n Omzon Mode o Emy onne Reoson nde neny eodo be n Demen o Mnemen nd enooy QM nd ene de Reee s es nsos Moné nd Mssmo D Fneso Demen o Lnd Enneen nesy o Iy o Zdds Demen o Lnd Enneen nesy o Iy Inodon. onne
n Omzon Mode o Emy onne Reoson nde neny eodo be n Demen o Mnemen nd enooy QM nd ene de Reee s es nsos Moné nd Mssmo D Fneso Demen o Lnd Enneen nesy o Iy o Zdds Demen o Lnd Enneen nesy o Iy Inodon. onne
Mass-Spring Systems Surface Reconstruction
 Mass-Spng Syses Physally-Based Modelng: Mass-Spng Syses M. Ale O. Vasles Mass-Spng Syses Mass-Spng Syses Snake pleenaon: Snake pleenaon: Iage Poessng / Sae Reonson: Iage poessng/ Sae Reonson: Mass-Spng
Mass-Spng Syses Physally-Based Modelng: Mass-Spng Syses M. Ale O. Vasles Mass-Spng Syses Mass-Spng Syses Snake pleenaon: Snake pleenaon: Iage Poessng / Sae Reonson: Iage poessng/ Sae Reonson: Mass-Spng
flbc in Russia. PIWiREE COHORTS ARE NOT PULL- ING TOGETHER. SIGHTS AND SCENES IN ST. PETERSBURG.
 # O E O KOE O F Y F O VO V NO 5 OE KEN ONY Y 2 9 OE NO 265 E K N F z 5 7 X ) $2 Q - EO NE? O - 5 OO Y F F 2 - P - F O - FEE > < 5 < P O - 9 #»»» F & & F $ P 57 5 9 E 64 } 5 { O $665 $5 $ 25 E F O 9 5 [
# O E O KOE O F Y F O VO V NO 5 OE KEN ONY Y 2 9 OE NO 265 E K N F z 5 7 X ) $2 Q - EO NE? O - 5 OO Y F F 2 - P - F O - FEE > < 5 < P O - 9 #»»» F & & F $ P 57 5 9 E 64 } 5 { O $665 $5 $ 25 E F O 9 5 [
c- : r - C ' ',. A a \ V
 HS PAGE DECLASSFED AW EO 2958 c C \ V A A a HS PAGE DECLASSFED AW EO 2958 HS PAGE DECLASSFED AW EO 2958 = N! [! D!! * J!! [ c 9 c 6 j C v C! ( «! Y y Y ^ L! J ( ) J! J ~ n + ~ L a Y C + J " J 7 = [ " S!
HS PAGE DECLASSFED AW EO 2958 c C \ V A A a HS PAGE DECLASSFED AW EO 2958 HS PAGE DECLASSFED AW EO 2958 = N! [! D!! * J!! [ c 9 c 6 j C v C! ( «! Y y Y ^ L! J ( ) J! J ~ n + ~ L a Y C + J " J 7 = [ " S!
A New Approach to Solve Fully Fuzzy Linear Programming with Trapezoidal Numbers Using Conversion Functions
 valale Onlne a hp://jnsaa Vol No n 5 Jonal of Ne eseahes n Maheas Sene and eseah Banh IU Ne ppoah o Solve Flly Fzzy nea Pogang h Tapezodal Nes Usng onveson Fnons SH Nasse * Depaen of Maheaal Senes Unvesy
valale Onlne a hp://jnsaa Vol No n 5 Jonal of Ne eseahes n Maheas Sene and eseah Banh IU Ne ppoah o Solve Flly Fzzy nea Pogang h Tapezodal Nes Usng onveson Fnons SH Nasse * Depaen of Maheaal Senes Unvesy
THIS PAGE DECLASSIFIED IAW EO IRIS u blic Record. Key I fo mation. Ma n: AIR MATERIEL COMM ND. Adm ni trative Mar ings.
 T H S PA G E D E CLA SSFED AW E O 2958 RS u blc Recod Key fo maon Ma n AR MATEREL COMM ND D cumen Type Call N u b e 03 V 7 Rcvd Rel 98 / 0 ndexe D 38 Eneed Dae RS l umbe 0 0 4 2 3 5 6 C D QC d Dac A cesson
T H S PA G E D E CLA SSFED AW E O 2958 RS u blc Recod Key fo maon Ma n AR MATEREL COMM ND D cumen Type Call N u b e 03 V 7 Rcvd Rel 98 / 0 ndexe D 38 Eneed Dae RS l umbe 0 0 4 2 3 5 6 C D QC d Dac A cesson
MATHEMATICAL MODEL OF THE DUMMY NECK INCLUDED IN A FRONTAL IMPACT TESTING SYSTEM
 he h Inenaonal onfeene Advaned opose Maeals Enneen OMA 8- Oobe Basov Roana MAHEMAIAL MODEL O HE DUMMY NEK INLUDED IN A RONAL IMPA ESIN SYSEM unel Sefana Popa Daos-Lauenu apan Vasle Unves of aova aova ROMANIA
he h Inenaonal onfeene Advaned opose Maeals Enneen OMA 8- Oobe Basov Roana MAHEMAIAL MODEL O HE DUMMY NEK INLUDED IN A RONAL IMPA ESIN SYSEM unel Sefana Popa Daos-Lauenu apan Vasle Unves of aova aova ROMANIA
CptS 570 Machine Learning School of EECS Washington State University. CptS Machine Learning 1
 ps 57 Machne Leann School of EES Washnon Sae Unves ps 57 - Machne Leann Assume nsances of classes ae lneal sepaable Esmae paamees of lnea dscmnan If ( - -) > hen + Else - ps 57 - Machne Leann lassfcaon
ps 57 Machne Leann School of EES Washnon Sae Unves ps 57 - Machne Leann Assume nsances of classes ae lneal sepaable Esmae paamees of lnea dscmnan If ( - -) > hen + Else - ps 57 - Machne Leann lassfcaon
X-Ray Notes, Part III
 oll 6 X-y oe 3: Pe X-Ry oe, P III oe Deeo Coe oupu o x-y ye h look lke h: We efe ue of que lhly ffee efo h ue y ovk: Co: C ΔS S Sl o oe Ro: SR S Co o oe Ro: CR ΔS C SR Pevouly, we ee he SR fo ye hv pxel
oll 6 X-y oe 3: Pe X-Ry oe, P III oe Deeo Coe oupu o x-y ye h look lke h: We efe ue of que lhly ffee efo h ue y ovk: Co: C ΔS S Sl o oe Ro: SR S Co o oe Ro: CR ΔS C SR Pevouly, we ee he SR fo ye hv pxel
APPLICATION OF A Z-TRANSFORMS METHOD FOR INVESTIGATION OF MARKOV G-NETWORKS
 Joa of Aed Mahema ad Comaoa Meha 4 3( 6-73 APPLCATON OF A Z-TRANSFORMS METHOD FOR NVESTGATON OF MARKOV G-NETWORKS Mha Maay Vo Nameo e of Mahema Ceohowa Uey of Tehoogy Cęohowa Poad Fay of Mahema ad Come
Joa of Aed Mahema ad Comaoa Meha 4 3( 6-73 APPLCATON OF A Z-TRANSFORMS METHOD FOR NVESTGATON OF MARKOV G-NETWORKS Mha Maay Vo Nameo e of Mahema Ceohowa Uey of Tehoogy Cęohowa Poad Fay of Mahema ad Come
_ J.. C C A 551NED. - n R ' ' t i :. t ; . b c c : : I I .., I AS IEC. r '2 5? 9
 C C A 55NED n R 5 0 9 b c c \ { s AS EC 2 5? 9 Con 0 \ 0265 o + s ^! 4 y!! {! w Y n < R > s s = ~ C c [ + * c n j R c C / e A / = + j ) d /! Y 6 ] s v * ^ / ) v } > { ± n S = S w c s y c C { ~! > R = n
C C A 55NED n R 5 0 9 b c c \ { s AS EC 2 5? 9 Con 0 \ 0265 o + s ^! 4 y!! {! w Y n < R > s s = ~ C c [ + * c n j R c C / e A / = + j ) d /! Y 6 ] s v * ^ / ) v } > { ± n S = S w c s y c C { ~! > R = n
4/3/2017. PHY 712 Electrodynamics 9-9:50 AM MWF Olin 103
 PHY 7 Eleodnais 9-9:50 AM MWF Olin 0 Plan fo Leue 0: Coninue eading Chap Snhoon adiaion adiaion fo eleon snhoon deies adiaion fo asonoial objes in iula obis 0/05/07 PHY 7 Sping 07 -- Leue 0 0/05/07 PHY
PHY 7 Eleodnais 9-9:50 AM MWF Olin 0 Plan fo Leue 0: Coninue eading Chap Snhoon adiaion adiaion fo eleon snhoon deies adiaion fo asonoial objes in iula obis 0/05/07 PHY 7 Sping 07 -- Leue 0 0/05/07 PHY
On Fractional Operational Calculus pertaining to the product of H- functions
 nenonl eh ounl of Enneen n ehnolo RE e-ssn: 2395-56 Volume: 2 ue: 3 une-25 wwwene -SSN: 2395-72 On Fonl Oeonl Clulu enn o he ou of - funon D VBL Chu, C A 2 Demen of hem, Unve of Rhn, u-3255, n E-ml : vl@hooom
nenonl eh ounl of Enneen n ehnolo RE e-ssn: 2395-56 Volume: 2 ue: 3 une-25 wwwene -SSN: 2395-72 On Fonl Oeonl Clulu enn o he ou of - funon D VBL Chu, C A 2 Demen of hem, Unve of Rhn, u-3255, n E-ml : vl@hooom
Variance of Time to Recruitment for a Single Grade Manpower System using Order Statistics for Inter-decision Times and Wastages
 Vaance o e o Recuen o a Sne Gae Manowe Syse usn Oe Sascs o Ine-ecson es an Wasaes K. Eanovan, B. Ese Caa Asssan Poesso, Deaen o Maeacs, Rajah Seoj Govenen Coee Auonoous, hanjavu - 6 005, a Nau, Ina. Asssan
Vaance o e o Recuen o a Sne Gae Manowe Syse usn Oe Sascs o Ine-ecson es an Wasaes K. Eanovan, B. Ese Caa Asssan Poesso, Deaen o Maeacs, Rajah Seoj Govenen Coee Auonoous, hanjavu - 6 005, a Nau, Ina. Asssan
P a g e 5 1 of R e p o r t P B 4 / 0 9
 P a g e 5 1 of R e p o r t P B 4 / 0 9 J A R T a l s o c o n c l u d e d t h a t a l t h o u g h t h e i n t e n t o f N e l s o n s r e h a b i l i t a t i o n p l a n i s t o e n h a n c e c o n n e
P a g e 5 1 of R e p o r t P B 4 / 0 9 J A R T a l s o c o n c l u d e d t h a t a l t h o u g h t h e i n t e n t o f N e l s o n s r e h a b i l i t a t i o n p l a n i s t o e n h a n c e c o n n e
Backcalculation Analysis of Pavement-layer Moduli Using Pattern Search Algorithms
 Bakallaon Analyss of Pavemen-laye Modl Usng Paen Seah Algohms Poje Repo fo ENCE 74 Feqan Lo May 7 005 Bakallaon Analyss of Pavemen-laye Modl Usng Paen Seah Algohms. Inodon. Ovevew of he Poje 3. Objeve
Bakallaon Analyss of Pavemen-laye Modl Usng Paen Seah Algohms Poje Repo fo ENCE 74 Feqan Lo May 7 005 Bakallaon Analyss of Pavemen-laye Modl Usng Paen Seah Algohms. Inodon. Ovevew of he Poje 3. Objeve
Chapter 3: Vectors and Two-Dimensional Motion
 Chape 3: Vecos and Two-Dmensonal Moon Vecos: magnude and decon Negae o a eco: eese s decon Mulplng o ddng a eco b a scala Vecos n he same decon (eaed lke numbes) Geneal Veco Addon: Tangle mehod o addon
Chape 3: Vecos and Two-Dmensonal Moon Vecos: magnude and decon Negae o a eco: eese s decon Mulplng o ddng a eco b a scala Vecos n he same decon (eaed lke numbes) Geneal Veco Addon: Tangle mehod o addon
Control and Path Planning of a Walk-Assist Robot using Differential Flatness
 he 00 EEE/RSJ nenaona Coneene on negen Robos and Sses Oobe 8-, 00, ape, awan Cono and Pah Pannng o a Wak-Asss Robo usng Deena Faness Chun-Hsu Ko and Sun K. Agawa Absa Wh he gowh o ede popuaon n ou soe,
he 00 EEE/RSJ nenaona Coneene on negen Robos and Sses Oobe 8-, 00, ape, awan Cono and Pah Pannng o a Wak-Asss Robo usng Deena Faness Chun-Hsu Ko and Sun K. Agawa Absa Wh he gowh o ede popuaon n ou soe,
ON THE EXTENSION OF WEAK ARMENDARIZ RINGS RELATIVE TO A MONOID
 wwweo/voue/vo9iue/ijas_9 9f ON THE EXTENSION OF WEAK AENDAIZ INGS ELATIVE TO A ONOID Eye A & Ayou Eoy Dee of e Nowe No Uvey Lzou 77 C Dee of e Uvey of Kou Ou Su E-: eye76@o; you975@yooo ABSTACT Fo oo we
wwweo/voue/vo9iue/ijas_9 9f ON THE EXTENSION OF WEAK AENDAIZ INGS ELATIVE TO A ONOID Eye A & Ayou Eoy Dee of e Nowe No Uvey Lzou 77 C Dee of e Uvey of Kou Ou Su E-: eye76@o; you975@yooo ABSTACT Fo oo we
A L A BA M A L A W R E V IE W
 A L A BA M A L A W R E V IE W Volume 52 Fall 2000 Number 1 B E F O R E D I S A B I L I T Y C I V I L R I G HT S : C I V I L W A R P E N S I O N S A N D TH E P O L I T I C S O F D I S A B I L I T Y I N
A L A BA M A L A W R E V IE W Volume 52 Fall 2000 Number 1 B E F O R E D I S A B I L I T Y C I V I L R I G HT S : C I V I L W A R P E N S I O N S A N D TH E P O L I T I C S O F D I S A B I L I T Y I N
On Probability Density Function of the Quotient of Generalized Order Statistics from the Weibull Distribution
 ISSN 684-843 Joua of Sac Voue 5 8 pp. 7-5 O Pobaby Dey Fuco of he Quoe of Geeaed Ode Sac fo he Webu Dbuo Abac The pobaby dey fuco of Muhaad Aee X k Y k Z whee k X ad Y k ae h ad h geeaed ode ac fo Webu
ISSN 684-843 Joua of Sac Voue 5 8 pp. 7-5 O Pobaby Dey Fuco of he Quoe of Geeaed Ode Sac fo he Webu Dbuo Abac The pobaby dey fuco of Muhaad Aee X k Y k Z whee k X ad Y k ae h ad h geeaed ode ac fo Webu
RESOLUTION NO
 RELUT 7 4 A RELUT F THE CTY CUCL F THE CTY F ATA AA T AED RELUT 9 66 T AED THE AC CPEAT PLA FR CLAFCAT F EPLYET DEGATED A UREPREETED EXECUTVE AAGEET E T RELVED Y THE CTY CUCL F THE CTY F ATA AA A FLLW
RELUT 7 4 A RELUT F THE CTY CUCL F THE CTY F ATA AA T AED RELUT 9 66 T AED THE AC CPEAT PLA FR CLAFCAT F EPLYET DEGATED A UREPREETED EXECUTVE AAGEET E T RELVED Y THE CTY CUCL F THE CTY F ATA AA A FLLW
OH BOY! Story. N a r r a t iv e a n d o bj e c t s th ea t e r Fo r a l l a g e s, fr o m th e a ge of 9
 OH BOY! O h Boy!, was or igin a lly cr eat ed in F r en ch an d was a m a jor s u cc ess on t h e Fr en ch st a ge f or young au di enc es. It h a s b een s een by ap pr ox i ma t ely 175,000 sp ect at
OH BOY! O h Boy!, was or igin a lly cr eat ed in F r en ch an d was a m a jor s u cc ess on t h e Fr en ch st a ge f or young au di enc es. It h a s b een s een by ap pr ox i ma t ely 175,000 sp ect at
ÖRNEK 1: THE LINEAR IMPULSE-MOMENTUM RELATION Calculate the linear momentum of a particle of mass m=10 kg which has a. kg m s
 MÜHENDİSLİK MEKANİĞİ. HAFTA İMPULS- MMENTUM-ÇARPIŞMA Linea oenu of a paicle: The sybol L denoes he linea oenu and is defined as he ass ies he elociy of a paicle. L ÖRNEK : THE LINEAR IMPULSE-MMENTUM RELATIN
MÜHENDİSLİK MEKANİĞİ. HAFTA İMPULS- MMENTUM-ÇARPIŞMA Linea oenu of a paicle: The sybol L denoes he linea oenu and is defined as he ass ies he elociy of a paicle. L ÖRNEK : THE LINEAR IMPULSE-MMENTUM RELATIN
I N A C O M P L E X W O R L D
 IS L A M I C E C O N O M I C S I N A C O M P L E X W O R L D E x p l o r a t i o n s i n A g-b eanste d S i m u l a t i o n S a m i A l-s u w a i l e m 1 4 2 9 H 2 0 0 8 I s l a m i c D e v e l o p m e
IS L A M I C E C O N O M I C S I N A C O M P L E X W O R L D E x p l o r a t i o n s i n A g-b eanste d S i m u l a t i o n S a m i A l-s u w a i l e m 1 4 2 9 H 2 0 0 8 I s l a m i c D e v e l o p m e
- l ost found upr i ght, dr i f t i n= i - Stand i ng i s boa t, star t i ng eng i nes and
 . pesena i on of 1975 and 1977 Raoo ed 3oe i n faa l i i es pevenab l e 1 a l l Sw i ch- MARCH 1979 1. UCUCR0m The ques i on of k i l l av i chea, dead man ho l es, and e he asss of sopp i ng unway boa
. pesena i on of 1975 and 1977 Raoo ed 3oe i n faa l i i es pevenab l e 1 a l l Sw i ch- MARCH 1979 1. UCUCR0m The ques i on of k i l l av i chea, dead man ho l es, and e he asss of sopp i ng unway boa
4.1 Schrödinger Equation in Spherical Coordinates
 Phs 34 Quu Mehs D 9 9 Mo./ Wed./ Thus /3 F./4 Mo., /7 Tues. / Wed., /9 F., /3 4.. -. Shodge Sphe: Sepo & gu (Q9.) 4..-.3 Shodge Sphe: gu & d(q9.) Copuo: Sphe Shodge s 4. Hdoge o (Q9.) 4.3 gu Moeu 4.4.-.
Phs 34 Quu Mehs D 9 9 Mo./ Wed./ Thus /3 F./4 Mo., /7 Tues. / Wed., /9 F., /3 4.. -. Shodge Sphe: Sepo & gu (Q9.) 4..-.3 Shodge Sphe: gu & d(q9.) Copuo: Sphe Shodge s 4. Hdoge o (Q9.) 4.3 gu Moeu 4.4.-.
2 shear strain / L for small angle
 Sac quaons F F M al Sess omal sess foce coss-seconal aea eage Shea Sess shea sess shea foce coss-seconal aea llowable Sess Faco of Safe F. S San falue Shea San falue san change n lengh ognal lengh Hooke
Sac quaons F F M al Sess omal sess foce coss-seconal aea eage Shea Sess shea sess shea foce coss-seconal aea llowable Sess Faco of Safe F. S San falue Shea San falue san change n lengh ognal lengh Hooke
Classification of Equations Characteristics
 Clssiiion o Eqions Cheisis Consie n elemen o li moing in wo imensionl spe enoe s poin P elow. The ph o P is inie he line. The posiion ile is s so h n inemenl isne long is s. Le he goening eqions e epesene
Clssiiion o Eqions Cheisis Consie n elemen o li moing in wo imensionl spe enoe s poin P elow. The ph o P is inie he line. The posiion ile is s so h n inemenl isne long is s. Le he goening eqions e epesene
β A Constant-G m Biasing
 p 2002 EE 532 Anal IC Des II Pae 73 Cnsan-G Bas ecall ha us a PTAT cuen efeence (see p f p. 66 he nes) bas a bpla anss pes cnsan anscnucance e epeaue (an als epenen f supply lae an pcess). Hw h we achee
p 2002 EE 532 Anal IC Des II Pae 73 Cnsan-G Bas ecall ha us a PTAT cuen efeence (see p f p. 66 he nes) bas a bpla anss pes cnsan anscnucance e epeaue (an als epenen f supply lae an pcess). Hw h we achee
English Made Easy: Foundation Book 1 Notes for parents
 a nh Ma ay: Fnan 1 pan h b n hp y ch an ay an by cn n h n n ach h n h aphab. h h achn an ca phnc. h nan, achn an wn ac w nca y ch an h na ach, a w a h n n ach a an hw wn n h pa. y cpn h pa h b, y ch w
a nh Ma ay: Fnan 1 pan h b n hp y ch an ay an by cn n h n n ach h n h aphab. h h achn an ca phnc. h nan, achn an wn ac w nca y ch an h na ach, a w a h n n ach a an hw wn n h pa. y cpn h pa h b, y ch w
TWO INTERFACIAL COLLINEAR GRIFFITH CRACKS IN THERMO- ELASTIC COMPOSITE MEDIA
 WO INERFIL OLLINER GRIFFIH RS IN HERMO- ELSI OMOSIE MEDI h m MISHR S DS * Deme o Mheml See I Ie o eholog BHU V-5 I he oee o he le o he e e o eeg o o olle Gh e he ee o he wo ohoo mel e e e emee el. he olem
WO INERFIL OLLINER GRIFFIH RS IN HERMO- ELSI OMOSIE MEDI h m MISHR S DS * Deme o Mheml See I Ie o eholog BHU V-5 I he oee o he le o he e e o eeg o o olle Gh e he ee o he wo ohoo mel e e e emee el. he olem
High Performance Adaptive Robust Control for Nonlinear System with Unknown Input Backlash
 Jon 48h IEEE Confeene on Deon n Cono n 8h Chnee Cono Confeene Shngh, P.R. Chn, Deebe 6-8, 9 FB.4 Hgh Pefone Ave Rob Cono fo Nonne Sye wh Unknown In Bkh Jn Go, Bn Yo, Mebe, IEEE n ASME, Qngwe Chen n Xobe
Jon 48h IEEE Confeene on Deon n Cono n 8h Chnee Cono Confeene Shngh, P.R. Chn, Deebe 6-8, 9 FB.4 Hgh Pefone Ave Rob Cono fo Nonne Sye wh Unknown In Bkh Jn Go, Bn Yo, Mebe, IEEE n ASME, Qngwe Chen n Xobe
Caputo Equations in the frame of fractional operators with Mittag-Leffler kernels
 nvenon Jounl o Reseh Tehnoloy n nneen & Mnemen JRTM SSN: 455-689 wwwjemom Volume ssue 0 ǁ Ooe 08 ǁ PP 9-45 Cuo uons n he me o onl oeos wh M-ele enels on Qn Chenmn Hou* Ynn Unvesy Jln Ynj 00 ASTRACT: n
nvenon Jounl o Reseh Tehnoloy n nneen & Mnemen JRTM SSN: 455-689 wwwjemom Volume ssue 0 ǁ Ooe 08 ǁ PP 9-45 Cuo uons n he me o onl oeos wh M-ele enels on Qn Chenmn Hou* Ynn Unvesy Jln Ynj 00 ASTRACT: n
5-1. We apply Newton s second law (specifically, Eq. 5-2). F = ma = ma sin 20.0 = 1.0 kg 2.00 m/s sin 20.0 = 0.684N. ( ) ( )
. F = ma = ma sin 20.0 = 1.0 kg 2.00 m/s sin 20.0 = 0.684N. ( ) ( )") 5-1. We apply Newon s second law (specfcally, Eq. 5-). (a) We fnd he componen of he foce s ( ) ( ) F = ma = ma cos 0.0 = 1.00kg.00m/s cos 0.0 = 1.88N. (b) The y componen of he foce s ( ) ( ) F = ma = ma
5-1. We apply Newon s second law (specfcally, Eq. 5-). (a) We fnd he componen of he foce s ( ) ( ) F = ma = ma cos 0.0 = 1.00kg.00m/s cos 0.0 = 1.88N. (b) The y componen of he foce s ( ) ( ) F = ma = ma
EE 410/510: Electromechanical Systems Chapter 3
 EE 4/5: Eleomehnl Syem hpe 3 hpe 3. Inoon o Powe Eleon Moelng n Applon of Op. Amp. Powe Amplfe Powe onvee Powe Amp n Anlog onolle Swhng onvee Boo onvee onvee Flyb n Fow onvee eonn n Swhng onvee 5// All
EE 4/5: Eleomehnl Syem hpe 3 hpe 3. Inoon o Powe Eleon Moelng n Applon of Op. Amp. Powe Amplfe Powe onvee Powe Amp n Anlog onolle Swhng onvee Boo onvee onvee Flyb n Fow onvee eonn n Swhng onvee 5// All
Fun and Fascinating Bible Reference for Kids Ages 8 to 12. starts on page 3! starts on page 163!
 F a Faa R K 8 12 a a 3! a a 163! 2013 a P, I. ISN 978-1-62416-216-9. N a a a a a, a,. C a a a a P, a 500 a a aa a. W, : F G: K Fa a Q &, a P, I. U. L aa a a a Fa a Q & a. C a 2 (M) Ta H P M (K) Wa P a
F a Faa R K 8 12 a a 3! a a 163! 2013 a P, I. ISN 978-1-62416-216-9. N a a a a a, a,. C a a a a P, a 500 a a aa a. W, : F G: K Fa a Q &, a P, I. U. L aa a a a Fa a Q & a. C a 2 (M) Ta H P M (K) Wa P a
L-1. Intertemporal Trade in a Two- Period Model
 L-. neempoal Tade n a Two- Peod Model Jaek Hník www.jaom-hnk.wbs.z Wha o Shold Alead now en aon def... s a esl of expos fallng sho of mpos. s a esl of savngs fallng sho of nvesmens. S A B NX G B B M X
L-. neempoal Tade n a Two- Peod Model Jaek Hník www.jaom-hnk.wbs.z Wha o Shold Alead now en aon def... s a esl of expos fallng sho of mpos. s a esl of savngs fallng sho of nvesmens. S A B NX G B B M X
Rotations.
 oons j.lbb@phscs.o.c.uk To s summ Fmes of efeence Invnce une nsfomons oon of wve funcon: -funcons Eule s ngles Emple: e e - - Angul momenum s oon geneo Genec nslons n Noehe s heoem Fmes of efeence Conse
oons j.lbb@phscs.o.c.uk To s summ Fmes of efeence Invnce une nsfomons oon of wve funcon: -funcons Eule s ngles Emple: e e - - Angul momenum s oon geneo Genec nslons n Noehe s heoem Fmes of efeence Conse
African Journal of Science and Technology (AJST) Science and Engineering Series Vol. 4, No. 2, pp GENERALISED DELETION DESIGNS
 Science and Engineering Series Vol. 4, No. 2, pp GENERALISED DELETION DESIGNS") Af Joul of See Tehology (AJST) See Egeeg See Vol. 4, No.,. 7-79 GENERALISED DELETION DESIGNS Mhel Ku Gh Joh Wylff Ohbo Dee of Mhe, Uvey of Nob, P. O. Bo 3097, Nob, Key ABSTRACT:- I h e yel gle ele fol
Af Joul of See Tehology (AJST) See Egeeg See Vol. 4, No.,. 7-79 GENERALISED DELETION DESIGNS Mhel Ku Gh Joh Wylff Ohbo Dee of Mhe, Uvey of Nob, P. O. Bo 3097, Nob, Key ABSTRACT:- I h e yel gle ele fol
K E L LY T H O M P S O N
 K E L LY T H O M P S O N S E A O LO G Y C R E ATO R, F O U N D E R, A N D PA R T N E R K e l l y T h o m p s o n i s t h e c r e a t o r, f o u n d e r, a n d p a r t n e r o f S e a o l o g y, a n e x
K E L LY T H O M P S O N S E A O LO G Y C R E ATO R, F O U N D E R, A N D PA R T N E R K e l l y T h o m p s o n i s t h e c r e a t o r, f o u n d e r, a n d p a r t n e r o f S e a o l o g y, a n e x
Technical Appendix for Inventory Management for an Assembly System with Product or Component Returns, DeCroix and Zipkin, Management Science 2005.
 Techc Appedx fo Iveoy geme fo Assemy Sysem wh Poduc o Compoe eus ecox d Zp geme Scece 2005 Lemm µ µ s c Poof If J d µ > µ he ˆ 0 µ µ µ µ µ µ µ µ Sm gumes essh he esu f µ ˆ > µ > µ > µ o K ˆ If J he so
Techc Appedx fo Iveoy geme fo Assemy Sysem wh Poduc o Compoe eus ecox d Zp geme Scece 2005 Lemm µ µ s c Poof If J d µ > µ he ˆ 0 µ µ µ µ µ µ µ µ Sm gumes essh he esu f µ ˆ > µ > µ > µ o K ˆ If J he so
Maximum Likelihood Estimation
 Mau Lkelhood aon Beln Chen Depaen of Copue Scence & Infoaon ngneeng aonal Tawan oal Unvey Refeence:. he Alpaydn, Inoducon o Machne Leanng, Chape 4, MIT Pe, 4 Saple Sac and Populaon Paaee A Scheac Depcon
Mau Lkelhood aon Beln Chen Depaen of Copue Scence & Infoaon ngneeng aonal Tawan oal Unvey Refeence:. he Alpaydn, Inoducon o Machne Leanng, Chape 4, MIT Pe, 4 Saple Sac and Populaon Paaee A Scheac Depcon
CRLB Derivation for Mobile Tracking in NLOS Propagation Environments
 0 Inenaonal Sos on Concaons an Inoaon echnoloes ISCI CLB Deaon o Moble acn n LOS Poaaon nonens Keen Y School o Sen an Geosaal nneen Unes o ew Soh Wales Sne Asala een@eeeo Dewcz Deaen o leconc nneen Macae
0 Inenaonal Sos on Concaons an Inoaon echnoloes ISCI CLB Deaon o Moble acn n LOS Poaaon nonens Keen Y School o Sen an Geosaal nneen Unes o ew Soh Wales Sne Asala een@eeeo Dewcz Deaen o leconc nneen Macae
H STO RY OF TH E SA NT
 O RY OF E N G L R R VER ritten for the entennial of th e Foundin g of t lair oun t y on ay 8 82 Y EEL N E JEN K RP O N! R ENJ F ] jun E 3 1 92! Ph in t ed b y h e t l a i r R ep u b l i c a n O 4 1922
O RY OF E N G L R R VER ritten for the entennial of th e Foundin g of t lair oun t y on ay 8 82 Y EEL N E JEN K RP O N! R ENJ F ] jun E 3 1 92! Ph in t ed b y h e t l a i r R ep u b l i c a n O 4 1922
SAVE THESE INSTRUCTIONS
 SAVE ESE NSUNS FFEE AE ASSEMY NSUNS SYE #: 53SN2301AS ASSEME N A FA, PEED SUFAE PPS EAD SEWDVE NEEDED F ASSEMY; N NUDED PA S FGUE UANY DESPN AA 1 P P 1 P EF SDE FAME 1 P G SDE FAME D 1 P A PANE E 2 PS
SAVE ESE NSUNS FFEE AE ASSEMY NSUNS SYE #: 53SN2301AS ASSEME N A FA, PEED SUFAE PPS EAD SEWDVE NEEDED F ASSEMY; N NUDED PA S FGUE UANY DESPN AA 1 P P 1 P EF SDE FAME 1 P G SDE FAME D 1 P A PANE E 2 PS
Increasing the Image Quality of Atomic Force Microscope by Using Improved Double Tapered Micro Cantilever
 Rece Reseaces Teecocaos foacs Eecocs a Sga Pocessg ceasg e age Qa of oc Foce Mcope Usg pove oe Tapee Mco aeve Saeg epae of Mecaca Egeeg aava Bac sac za Uves aava Tea a a_saeg@aavaa.ac. sac: Te esoa feqec
Rece Reseaces Teecocaos foacs Eecocs a Sga Pocessg ceasg e age Qa of oc Foce Mcope Usg pove oe Tapee Mco aeve Saeg epae of Mecaca Egeeg aava Bac sac za Uves aava Tea a a_saeg@aavaa.ac. sac: Te esoa feqec
Name of the Student:
 Engneeng Mahemacs 05 SUBJEC NAME : Pobably & Random Pocess SUBJEC CODE : MA645 MAERIAL NAME : Fomula Maeal MAERIAL CODE : JM08AM007 REGULAION : R03 UPDAED ON : Febuay 05 (Scan he above QR code fo he dec
Engneeng Mahemacs 05 SUBJEC NAME : Pobably & Random Pocess SUBJEC CODE : MA645 MAERIAL NAME : Fomula Maeal MAERIAL CODE : JM08AM007 REGULAION : R03 UPDAED ON : Febuay 05 (Scan he above QR code fo he dec
Discontinuity, Nonlinearity, and Complexity
 Dsonnuy Nonneay an Compey hps://hsenfpubshng.om/jounas/dnc-defau.asp Unvesa Pnpes of Pefe Chaos Segey Kamenshhov Physa Depamen Mosow Sae Unvesy of M.V.omonosov Mosow 999 Russa Submsson Info Communae by
Dsonnuy Nonneay an Compey hps://hsenfpubshng.om/jounas/dnc-defau.asp Unvesa Pnpes of Pefe Chaos Segey Kamenshhov Physa Depamen Mosow Sae Unvesy of M.V.omonosov Mosow 999 Russa Submsson Info Communae by
Cylon BACnet Unitary Controller (CBT) Range
 Range") ATASHEET Cyo BAC y Coo (CBT) Rg Th Cyo BAC y Coo (CBT) Rg g o BTL L BAC Av Appo Coo wh p 8 op, y o oog g o p. Th v h g ow o o, po ppo o g VAV ppo. BAC MS/TP F Sppo h oowg og BAC oj: A/B/AO/BO/AV/BV, A,
ATASHEET Cyo BAC y Coo (CBT) Rg Th Cyo BAC y Coo (CBT) Rg g o BTL L BAC Av Appo Coo wh p 8 op, y o oog g o p. Th v h g ow o o, po ppo o g VAV ppo. BAC MS/TP F Sppo h oowg og BAC oj: A/B/AO/BO/AV/BV, A,
CIRCUITS AND ELECTRONICS. The Impedance Model
 6.00 UTS AND EETONS The medance Mode e as: Anan Agawa and Jeffey ang, couse maeas fo 6.00 cus and Eeconcs, Sng 007. MT OenouseWae (h://ocw.m.edu/), Massachuses nsue of Technoogy. Downoaded on [DD Monh
6.00 UTS AND EETONS The medance Mode e as: Anan Agawa and Jeffey ang, couse maeas fo 6.00 cus and Eeconcs, Sng 007. MT OenouseWae (h://ocw.m.edu/), Massachuses nsue of Technoogy. Downoaded on [DD Monh
Scripture quotations marked cev are from the Contemporary English Version, Copyright 1991, 1992, 1995 by American Bible Society. Used by permission.
 N Ra: E K B Da a a B a a, a-a- a aa, a a. T, a a. 2009 Ba P, I. ISBN 978-1-60260-296-0. N a a a a a, a,. C a a a Ba P, a 500 a a aa a. W, : F K B Da, Ba P, I. U. S a a a a K Ja V B. S a a a a N K Ja V.
N Ra: E K B Da a a B a a, a-a- a aa, a a. T, a a. 2009 Ba P, I. ISBN 978-1-60260-296-0. N a a a a a, a,. C a a a Ba P, a 500 a a aa a. W, : F K B Da, Ba P, I. U. S a a a a K Ja V B. S a a a a N K Ja V.
FRACTIONAL MELLIN INTEGRAL TRANSFORM IN (0, 1/a)
") Ieol Jol o Se Reeh Pblo Volme Ie 5 y ISSN 5-5 FRACTIONAL ELLIN INTEGRAL TRANSFOR IN / S.. Kh R..Pe* J.N.Slke** Deme o hem hh Aemy o Egeeg Al-45 Pe I oble No.: 98576F No.: -785759 Eml-mkh@gml.om Deme o
Ieol Jol o Se Reeh Pblo Volme Ie 5 y ISSN 5-5 FRACTIONAL ELLIN INTEGRAL TRANSFOR IN / S.. Kh R..Pe* J.N.Slke** Deme o hem hh Aemy o Egeeg Al-45 Pe I oble No.: 98576F No.: -785759 Eml-mkh@gml.om Deme o
Coupled Mass Transport and Reaction in LPCVD Reactors
 ople Ma Tanpo an eaion in LPV eao ile A in B e.g., SiH 4 in H Sepaae eao ino o egion, inaafe & annla b - oniniy Eqn: : onveion-iffion iffion-eaion Eqn Ampion! ile peie i in majo aie ga e.g., H isih 4!
ople Ma Tanpo an eaion in LPV eao ile A in B e.g., SiH 4 in H Sepaae eao ino o egion, inaafe & annla b - oniniy Eqn: : onveion-iffion iffion-eaion Eqn Ampion! ile peie i in majo aie ga e.g., H isih 4!
Physics 201 Lecture 15
 Phscs 0 Lecue 5 l Goals Lecue 5 v Elo consevaon of oenu n D & D v Inouce oenu an Iulse Coens on oenu Consevaon l oe geneal han consevaon of echancal eneg l oenu Consevaon occus n sses wh no ne eenal foces
Phscs 0 Lecue 5 l Goals Lecue 5 v Elo consevaon of oenu n D & D v Inouce oenu an Iulse Coens on oenu Consevaon l oe geneal han consevaon of echancal eneg l oenu Consevaon occus n sses wh no ne eenal foces
THIS PAGE DECLASSIFIED IAW EO 12958
 THIS PAGE DECLASSIFIED IAW EO 2958 THIS PAGE DECLASSIFIED IAW EO 2958 THIS PAGE DECLASSIFIED IAW E0 2958 S T T T I R F R S T Exhb e 3 9 ( 66 h Bm dn ) c f o 6 8 b o d o L) B C = 6 h oup C L) TO d 8 f f
THIS PAGE DECLASSIFIED IAW EO 2958 THIS PAGE DECLASSIFIED IAW EO 2958 THIS PAGE DECLASSIFIED IAW E0 2958 S T T T I R F R S T Exhb e 3 9 ( 66 h Bm dn ) c f o 6 8 b o d o L) B C = 6 h oup C L) TO d 8 f f
M1 a. So there are 4 cases from the total 16.
 M1 a. Remember that overflow is defined as the result of the operation making no sense, which in 2's complement representa tion is equivalent to the mathematical result not fitting in the format. if any
M1 a. Remember that overflow is defined as the result of the operation making no sense, which in 2's complement representa tion is equivalent to the mathematical result not fitting in the format. if any
Chapter 6 Plane Motion of Rigid Bodies
 Chpe 6 Pne oon of Rd ode 6. Equon of oon fo Rd bod. 6., 6., 6.3 Conde d bod ced upon b ee een foce,, 3,. We cn ume h he bod mde of e numbe n of pce of m Δm (,,, n). Conden f he moon of he m cene of he
Chpe 6 Pne oon of Rd ode 6. Equon of oon fo Rd bod. 6., 6., 6.3 Conde d bod ced upon b ee een foce,, 3,. We cn ume h he bod mde of e numbe n of pce of m Δm (,,, n). Conden f he moon of he m cene of he
or i 2 = -1 i 4 = 1 Example : ( i ),, 7 i and 0 are complex numbers. and Imaginary part of z = b or img z = b
,, 7 i and 0 are complex numbers. and Imaginary part of z = b or img z = b") 1 A- LEVEL MATHEMATICS P 3 Complex Numbers (NOTES) 1. Given a quadratic equation : x 2 + 1 = 0 or ( x 2 = -1 ) has no solution in the set of real numbers, as there does not exist any real number whose
1 A- LEVEL MATHEMATICS P 3 Complex Numbers (NOTES) 1. Given a quadratic equation : x 2 + 1 = 0 or ( x 2 = -1 ) has no solution in the set of real numbers, as there does not exist any real number whose
Relative and Circular Motion
 Relaie and Cicula Moion a) Relaie moion b) Cenipeal acceleaion Mechanics Lecue 3 Slide 1 Mechanics Lecue 3 Slide 2 Time on Video Pelecue Looks like mosly eeyone hee has iewed enie pelecue GOOD! Thank you
Relaie and Cicula Moion a) Relaie moion b) Cenipeal acceleaion Mechanics Lecue 3 Slide 1 Mechanics Lecue 3 Slide 2 Time on Video Pelecue Looks like mosly eeyone hee has iewed enie pelecue GOOD! Thank you
THIS PAGE DECLASSIFIED IAW E
 THS PAGE DECLASSFED AW E0 2958 BL K THS PAGE DECLASSFED AW E0 2958 THS PAGE DECLASSFED AW E0 2958 B L K THS PAGE DECLASSFED AW E0 2958 THS PAGE DECLASSFED AW EO 2958 THS PAGE DECLASSFED AW EO 2958 THS
THS PAGE DECLASSFED AW E0 2958 BL K THS PAGE DECLASSFED AW E0 2958 THS PAGE DECLASSFED AW E0 2958 B L K THS PAGE DECLASSFED AW E0 2958 THS PAGE DECLASSFED AW EO 2958 THS PAGE DECLASSFED AW EO 2958 THS
Chapter 1 Fundamentals in Elasticity
 Fs s . Ioo ssfo of ss Ms 분체역학 G Ms 역학 Ms 열역학 o Ms 유체역학 F Ms o Ms 고체역학 o Ms 구조해석 ss Dfo of Ms o B o w oo of os o of fos s s w o s s. Of fs o o of oo fos os o o o. s s o s of s os s o s o o of fos o. G fos
Fs s . Ioo ssfo of ss Ms 분체역학 G Ms 역학 Ms 열역학 o Ms 유체역학 F Ms o Ms 고체역학 o Ms 구조해석 ss Dfo of Ms o B o w oo of os o of fos s s w o s s. Of fs o o of oo fos os o o o. s s o s of s os s o s o o of fos o. G fos
A Dynamical Quasi-Boolean System
 ULETNUL Uestăţ Petol Gze Ploeşt Vol LX No / - 9 Se Mtetă - otă - Fză l Qs-oole Sste Gel Mose Petole-Gs Uest o Ploest ots etet est 39 Ploest 68 o el: ose@-loesto stt Ths e oes the esto o ol theoetl oet:
ULETNUL Uestăţ Petol Gze Ploeşt Vol LX No / - 9 Se Mtetă - otă - Fză l Qs-oole Sste Gel Mose Petole-Gs Uest o Ploest ots etet est 39 Ploest 68 o el: ose@-loesto stt Ths e oes the esto o ol theoetl oet:
An action with positive kinetic energy term for general relativity. T. Mei
 An ton wt post nt ny t fo n tty T (Dptnt of Jon Cnt Cn o Unsty Wn H PRO Pop s Rp of Cn E-: to@nn tow@pwn ) Astt: At fst w stt so sts n X: 7769 n tn sn post nt ny oont onton n y X: 7769 w psnt n ton wt
An ton wt post nt ny t fo n tty T (Dptnt of Jon Cnt Cn o Unsty Wn H PRO Pop s Rp of Cn E-: to@nn tow@pwn ) Astt: At fst w stt so sts n X: 7769 n tn sn post nt ny oont onton n y X: 7769 w psnt n ton wt
Agenda Rationale for ETG S eek ing I d eas ETG fram ew ork and res u lts 2
 Internal Innovation @ C is c o 2 0 0 6 C i s c o S y s t e m s, I n c. A l l r i g h t s r e s e r v e d. C i s c o C o n f i d e n t i a l 1 Agenda Rationale for ETG S eek ing I d eas ETG fram ew ork
Internal Innovation @ C is c o 2 0 0 6 C i s c o S y s t e m s, I n c. A l l r i g h t s r e s e r v e d. C i s c o C o n f i d e n t i a l 1 Agenda Rationale for ETG S eek ing I d eas ETG fram ew ork
TARGETEDMULTISCREEN ADVERTISING ACASESTUDY:GENERATINGANEW REVENUESTREAM WITHAPERSONALIZEDHIGH-QUALITYEXPERIENCE
 TARGETEDMULTISCREEN ADVERTISING ACASESTUDY:GENERATINGANEW REVENUESTREAM WITHAPERSONALIZEDHIGH-QUALITYEXPERIENCE INTRODUCTION OneoageabepodenU.S.ownandmanageadaned,we-ueedabe yemao29aehoughououny.whmoehan10monubbe,
TARGETEDMULTISCREEN ADVERTISING ACASESTUDY:GENERATINGANEW REVENUESTREAM WITHAPERSONALIZEDHIGH-QUALITYEXPERIENCE INTRODUCTION OneoageabepodenU.S.ownandmanageadaned,we-ueedabe yemao29aehoughououny.whmoehan10monubbe,
Active Load. Reading S&S (5ed): Sec. 7.2 S&S (6ed): Sec. 8.2
: Sec. 7.2 S&S (6ed): Sec. 8.2") cte La ean S&S (5e: Sec. 7. S&S (6e: Sec. 8. In nteate ccuts, t s ffcult t fabcate essts. Instea, aplfe cnfuatns typcally use acte las (.e. las ae w acte eces. Ths can be ne usn a cuent suce cnfuatn,.e.
cte La ean S&S (5e: Sec. 7. S&S (6e: Sec. 8. In nteate ccuts, t s ffcult t fabcate essts. Instea, aplfe cnfuatns typcally use acte las (.e. las ae w acte eces. Ths can be ne usn a cuent suce cnfuatn,.e.
I M P O R T A N T S A F E T Y I N S T R U C T I O N S W h e n u s i n g t h i s e l e c t r o n i c d e v i c e, b a s i c p r e c a u t i o n s s h o
 I M P O R T A N T S A F E T Y I N S T R U C T I O N S W h e n u s i n g t h i s e l e c t r o n i c d e v i c e, b a s i c p r e c a u t i o n s s h o u l d a l w a y s b e t a k e n, i n c l u d f o l
I M P O R T A N T S A F E T Y I N S T R U C T I O N S W h e n u s i n g t h i s e l e c t r o n i c d e v i c e, b a s i c p r e c a u t i o n s s h o u l d a l w a y s b e t a k e n, i n c l u d f o l
Factorization of weighted EP elements in C -algebras
 Factorization of weighted EP elements in C -algebras Dijana Mosić, Dragan S. Djordjević Abstract We present characterizations of weighted EP elements in C -algebras using different kinds of factorizations.
Factorization of weighted EP elements in C -algebras Dijana Mosić, Dragan S. Djordjević Abstract We present characterizations of weighted EP elements in C -algebras using different kinds of factorizations.
156 There are 9 books stacked on a shelf. The thickness of each book is either 1 inch or 2
 156 Thee ae 9 books sacked on a shelf. The hickness of each book is eihe 1 inch o 2 F inches. The heigh of he sack of 9 books is 14 inches. Which sysem of equaions can be used o deemine x, he numbe of
156 Thee ae 9 books sacked on a shelf. The hickness of each book is eihe 1 inch o 2 F inches. The heigh of he sack of 9 books is 14 inches. Which sysem of equaions can be used o deemine x, he numbe of
P a g e 3 6 of R e p o r t P B 4 / 0 9
 P a g e 3 6 of R e p o r t P B 4 / 0 9 p r o t e c t h um a n h e a l t h a n d p r o p e r t y fr om t h e d a n g e rs i n h e r e n t i n m i n i n g o p e r a t i o n s s u c h a s a q u a r r y. J
P a g e 3 6 of R e p o r t P B 4 / 0 9 p r o t e c t h um a n h e a l t h a n d p r o p e r t y fr om t h e d a n g e rs i n h e r e n t i n m i n i n g o p e r a t i o n s s u c h a s a q u a r r y. J
THIS PAGE DECLASSIFIED IAW EO 12958
 L " ^ \ : / 4 a " G E G + : C 4 w i V T / J ` { } ( : f c : < J ; G L ( Y e < + a : v! { : [ y v : ; a G : : : S 4 ; l J / \ l " ` : 5 L " 7 F } ` " x l } l i > G < Y / : 7 7 \ a? / c = l L i L l / c f
L " ^ \ : / 4 a " G E G + : C 4 w i V T / J ` { } ( : f c : < J ; G L ( Y e < + a : v! { : [ y v : ; a G : : : S 4 ; l J / \ l " ` : 5 L " 7 F } ` " x l } l i > G < Y / : 7 7 \ a? / c = l L i L l / c f
cmanagementi MBA Level7 Management Management
 "TheOn nelea n ngreo u on" Po g adua ele e 7D p oma ns a eg Managemen S udeni n o ma onpa k opo g adua ele e 7D p oma ns a eg Managemen Po g adua elee7d p oma ns a eg Managemen ThePo g adua ele e 7D p
"TheOn nelea n ngreo u on" Po g adua ele e 7D p oma ns a eg Managemen S udeni n o ma onpa k opo g adua ele e 7D p oma ns a eg Managemen Po g adua elee7d p oma ns a eg Managemen ThePo g adua ele e 7D p
Control Volume Derivation
 School of eospace Engineeing Conol Volume -1 Copyigh 1 by Jey M. Seizman. ll ighs esee. Conol Volume Deiaion How o cone ou elaionships fo a close sysem (conol mass) o an open sysem (conol olume) Fo mass
School of eospace Engineeing Conol Volume -1 Copyigh 1 by Jey M. Seizman. ll ighs esee. Conol Volume Deiaion How o cone ou elaionships fo a close sysem (conol mass) o an open sysem (conol olume) Fo mass
Physics 232 Exam II Mar. 28, 2005
 Phi 3 M. 8, 5 So. Se # Ne. A piee o gl, ide o eio.5, h hi oig o oil o i. The oil h ide o eio.4.d hike o. Fo wh welegh, i he iile egio, do ou ge o eleio? The ol phe dieee i gie δ Tol δ PhDieee δ i,il δ
Phi 3 M. 8, 5 So. Se # Ne. A piee o gl, ide o eio.5, h hi oig o oil o i. The oil h ide o eio.4.d hike o. Fo wh welegh, i he iile egio, do ou ge o eleio? The ol phe dieee i gie δ Tol δ PhDieee δ i,il δ
! -., THIS PAGE DECLASSIFIED IAW EQ t Fr ra _ ce, _., I B T 1CC33ti3HI QI L '14 D? 0. l d! .; ' D. o.. r l y. - - PR Pi B nt 8, HZ5 0 QL
 H PAGE DECAFED AW E0 2958 UAF HORCA UD & D m \ Z c PREMNAR D FGHER BOMBER ARC o v N C o m p R C DECEMBER 956 PREPARED B HE UAF HORCA DVO N HRO UGH HE COOPERAON O F HE HORCA DVON HEADQUARER UAREUR DEPARMEN
H PAGE DECAFED AW E0 2958 UAF HORCA UD & D m \ Z c PREMNAR D FGHER BOMBER ARC o v N C o m p R C DECEMBER 956 PREPARED B HE UAF HORCA DVO N HRO UGH HE COOPERAON O F HE HORCA DVON HEADQUARER UAREUR DEPARMEN
ANSWERS TO ODD NUMBERED EXERCISES IN CHAPTER 2
 Joh Rley Novembe ANSWERS O ODD NUMBERED EXERCISES IN CHAPER Seo Eese -: asvy (a) Se y ad y z follows fom asvy ha z Ehe z o z We suppose he lae ad seek a oado he z Se y follows by asvy ha z y Bu hs oads
Joh Rley Novembe ANSWERS O ODD NUMBERED EXERCISES IN CHAPER Seo Eese -: asvy (a) Se y ad y z follows fom asvy ha z Ehe z o z We suppose he lae ad seek a oado he z Se y follows by asvy ha z y Bu hs oads
Computer Propagation Analysis Tools
 Compue Popagaion Analysis Tools. Compue Popagaion Analysis Tools Inoducion By now you ae pobably geing he idea ha pedicing eceived signal sengh is a eally impoan as in he design of a wieless communicaion
Compue Popagaion Analysis Tools. Compue Popagaion Analysis Tools Inoducion By now you ae pobably geing he idea ha pedicing eceived signal sengh is a eally impoan as in he design of a wieless communicaion
! 94
 ! 94 4 : - : : / : : : : ( :) : : : - : / : / : : - 4 : -4 : : : : : -5 () ( ) : -6 : - - : : : () : : : :4 : -7. : : -8. (. : ( : -9 : ( ( ( (5 (4 4 : -0! : ( : ( :. : (. (. (. (4. ( ( ( : ( 4 : - : :
! 94 4 : - : : / : : : : ( :) : : : - : / : / : : - 4 : -4 : : : : : -5 () ( ) : -6 : - - : : : () : : : :4 : -7. : : -8. (. : ( : -9 : ( ( ( (5 (4 4 : -0! : ( : ( :. : (. (. (. (4. ( ( ( : ( 4 : - : :
Time-Space Model of Business Fluctuations
 Time-Sace Moel of Business Flucuaions Aleei Kouglov*, Mahemaical Cene 9 Cown Hill Place, Suie 3, Eobicoke, Onaio M8Y 4C5, Canaa Email: Aleei.Kouglov@SiconVieo.com * This aicle eesens he esonal view of
Time-Sace Moel of Business Flucuaions Aleei Kouglov*, Mahemaical Cene 9 Cown Hill Place, Suie 3, Eobicoke, Onaio M8Y 4C5, Canaa Email: Aleei.Kouglov@SiconVieo.com * This aicle eesens he esonal view of
AN ALGEBRAIC APPROACH TO M-BAND WAVELETS CONSTRUCTION
 AN ALGEBRAIC APPROACH TO -BAN WAELETS CONSTRUCTION Toy L Qy S Pewe Ho Ntol Lotoy o e Peeto Pe Uety Be 8 P. R. C Att T e eet le o to ott - otool welet e. A yte of ott eto ote fo - otool flte te olto e o
AN ALGEBRAIC APPROACH TO -BAN WAELETS CONSTRUCTION Toy L Qy S Pewe Ho Ntol Lotoy o e Peeto Pe Uety Be 8 P. R. C Att T e eet le o to ott - otool welet e. A yte of ott eto ote fo - otool flte te olto e o
Experiment 1 Electric field and electric potential
 Expeiment 1 Eleti field and eleti potential Pupose Map eleti equipotential lines and eleti field lines fo two-dimensional hage onfiguations. Equipment Thee sheets of ondutive papes with ondutive-ink eletodes,
Expeiment 1 Eleti field and eleti potential Pupose Map eleti equipotential lines and eleti field lines fo two-dimensional hage onfiguations. Equipment Thee sheets of ondutive papes with ondutive-ink eletodes,
Chapter 1 Fundamentals in Elasticity
 Fs s ν . Ioo ssfo of ss Ms 분체역학 G Ms 역학 Ms 열역학 o Ms 유체역학 F Ms o Ms 고체역학 o Ms 구조해석 ss Dfo of Ms o o w oo of os o of fos s s w o s s. Of fs o o of oo fos os o o o. s s o s of s os s o s o o of fos o. G fos
Fs s ν . Ioo ssfo of ss Ms 분체역학 G Ms 역학 Ms 열역학 o Ms 유체역학 F Ms o Ms 고체역학 o Ms 구조해석 ss Dfo of Ms o o w oo of os o of fos s s w o s s. Of fs o o of oo fos os o o o. s s o s of s os s o s o o of fos o. G fos
On the hydrogen wave function in Momentum-space, Clifford algebra and the Generating function of Gegenbauer polynomial
 O he hoge we fco Moe-sce ffo geb he eeg fco of egebe oo Meh Hge Hss To ce hs eso: Meh Hge Hss O he hoge we fco Moe-sce ffo geb he eeg fco of egebe oo 8 HL I: h- hs://hches-oeesf/h- Sbe o J 8 HL s
O he hoge we fco Moe-sce ffo geb he eeg fco of egebe oo Meh Hge Hss To ce hs eso: Meh Hge Hss O he hoge we fco Moe-sce ffo geb he eeg fco of egebe oo 8 HL I: h- hs://hches-oeesf/h- Sbe o J 8 HL s
Exponential and Logarithmic Equations and Properties of Logarithms. Properties. Properties. log. Exponential. Logarithmic.
 Eponenial and Logaihmic Equaions and Popeies of Logaihms Popeies Eponenial a a s = a +s a /a s = a -s (a ) s = a s a b = (ab) Logaihmic log s = log + logs log/s = log - logs log s = s log log a b = loga
Eponenial and Logaihmic Equaions and Popeies of Logaihms Popeies Eponenial a a s = a +s a /a s = a -s (a ) s = a s a b = (ab) Logaihmic log s = log + logs log/s = log - logs log s = s log log a b = loga
Two-Pion Exchange Currents in Photodisintegration of the Deuteron
 Two-Pion Exchange Cuens in Phoodisinegaion of he Deueon Dagaa Rozędzik and Jacek Goak Jagieonian Univesiy Kaków MENU00 3 May 00 Wiiasbug Conen Chia Effecive Fied Theoy ChEFT Eecoagneic cuen oeaos wihin
Two-Pion Exchange Cuens in Phoodisinegaion of he Deueon Dagaa Rozędzik and Jacek Goak Jagieonian Univesiy Kaków MENU00 3 May 00 Wiiasbug Conen Chia Effecive Fied Theoy ChEFT Eecoagneic cuen oeaos wihin
EMA5001 Lecture 3 Steady State & Nonsteady State Diffusion - Fick s 2 nd Law & Solutions
 EMA5 Lecue 3 Seady Sae & Noseady Sae ffuso - Fck s d Law & Soluos EMA 5 Physcal Popees of Maeals Zhe heg (6) 3 Noseady Sae ff Fck s d Law Seady-Sae ffuso Seady Sae Seady Sae = Equlbum? No! Smlay: Sae fuco
EMA5 Lecue 3 Seady Sae & Noseady Sae ffuso - Fck s d Law & Soluos EMA 5 Physcal Popees of Maeals Zhe heg (6) 3 Noseady Sae ff Fck s d Law Seady-Sae ffuso Seady Sae Seady Sae = Equlbum? No! Smlay: Sae fuco
A New Dynamic Random Fuzzy DEA Model to Predict Performance of Decision Making Units
 Jo o Ozo I Egg 6 75-9 A w D Ro Fzz DEA Mo o P Po o Do Mg U A gho * Mgho A Azoh S Sgh A Poo D o I Egg F o Egg P--oo U Th I Poo D o I Mg Ah T U Th I A Poo D o I Egg F o Egg P--oo U Th I R Oo 4; R 3 J 5;
Jo o Ozo I Egg 6 75-9 A w D Ro Fzz DEA Mo o P Po o Do Mg U A gho * Mgho A Azoh S Sgh A Poo D o I Egg F o Egg P--oo U Th I Poo D o I Mg Ah T U Th I A Poo D o I Egg F o Egg P--oo U Th I R Oo 4; R 3 J 5;
COMPILATION OF AUTOMATA FROM MORPHOLOGICAL TWO-LEVEL RULES
 Kimmo Koskenniemi Re se ar ch Unit for Co mp ut at io na l Li ng ui st ic s University of Helsinki, Hallituskatu 11 SF-00100 Helsinki, Finland COMPILATION OF AUTOMATA FROM MORPHOLOGICAL TWO-LEVEL RULES
Kimmo Koskenniemi Re se ar ch Unit for Co mp ut at io na l Li ng ui st ic s University of Helsinki, Hallituskatu 11 SF-00100 Helsinki, Finland COMPILATION OF AUTOMATA FROM MORPHOLOGICAL TWO-LEVEL RULES
Sections 3.1 and 3.4 Exponential Functions (Growth and Decay)
") Secions 3.1 and 3.4 Eponenial Funcions (Gowh and Decay) Chape 3. Secions 1 and 4 Page 1 of 5 Wha Would You Rahe Have... $1million, o double you money evey day fo 31 days saing wih 1cen? Day Cens Day Cens
Secions 3.1 and 3.4 Eponenial Funcions (Gowh and Decay) Chape 3. Secions 1 and 4 Page 1 of 5 Wha Would You Rahe Have... $1million, o double you money evey day fo 31 days saing wih 1cen? Day Cens Day Cens
Day Care Center for Arab & Jewish Children at Risk. Arab Jewish Community Center. h bah AJ l pp32 ba t A b nan uj A Aw ba,
 s a s t s 9El E es fl ej u A h s d t Ah e- - uj A, J s2, 9Ell Arab Jewish Community Center h bah AJ l pp32 ba t A b nan uj A Aw ba, sh e uhba- 2 sahc J J t Ah e- - uj A, u J sa - J J u CeJ b CnAC h es
s a s t s 9El E es fl ej u A h s d t Ah e- - uj A, J s2, 9Ell Arab Jewish Community Center h bah AJ l pp32 ba t A b nan uj A Aw ba, sh e uhba- 2 sahc J J t Ah e- - uj A, u J sa - J J u CeJ b CnAC h es
". :'=: "t',.4 :; :::-':7'- --,r. "c:"" --; : I :. \ 1 :;,'I ~,:-._._'.:.:1... ~~ \..,i ... ~.. ~--~ ( L ;...3L-. ' f.':... I. -.1;':'.
 = 47 \ \ L 3L f \ / \ L \ \ j \ \ 6! \ j \ / w j / \ \ 4 / N L5 Dm94 O6zq 9 qmn j!!! j 3DLLE N f 3LLE Of ADL!N RALROAD ORAL OR AL AOAON N 5 5 D D 9 94 4 E ROL 2LL RLLAY RL AY 3 ER OLLL 832 876 8 76 L A
= 47 \ \ L 3L f \ / \ L \ \ j \ \ 6! \ j \ / w j / \ \ 4 / N L5 Dm94 O6zq 9 qmn j!!! j 3DLLE N f 3LLE Of ADL!N RALROAD ORAL OR AL AOAON N 5 5 D D 9 94 4 E ROL 2LL RLLAY RL AY 3 ER OLLL 832 876 8 76 L A
Electromagnetic waves in vacuum.
 leromagne waves n vauum. The dsovery of dsplaemen urrens enals a peular lass of soluons of Maxwell equaons: ravellng waves of eler and magne felds n vauum. In he absene of urrens and harges, he equaons
leromagne waves n vauum. The dsovery of dsplaemen urrens enals a peular lass of soluons of Maxwell equaons: ravellng waves of eler and magne felds n vauum. In he absene of urrens and harges, he equaons
T h e C S E T I P r o j e c t
 T h e P r o j e c t T H E P R O J E C T T A B L E O F C O N T E N T S A r t i c l e P a g e C o m p r e h e n s i v e A s s es s m e n t o f t h e U F O / E T I P h e n o m e n o n M a y 1 9 9 1 1 E T
T h e P r o j e c t T H E P R O J E C T T A B L E O F C O N T E N T S A r t i c l e P a g e C o m p r e h e n s i v e A s s es s m e n t o f t h e U F O / E T I P h e n o m e n o n M a y 1 9 9 1 1 E T
T T V e g em D e j ) a S D } a o "m ek j g ed b m "d mq m [ d, )
 a S D } a o m ek j g ed b m d mq m [ d, )") . ) 6 3 ; 6 ;, G E E W T S W X D ^ L J R Y [ _ ` E ) '" " " -, 7 4-4 4-4 ; ; 7 4 4 4 4 4 ;= : " B C CA BA " ) 3D H E V U T T V e g em D e j ) a S D } a o "m ek j g ed b m "d mq m [ d, ) W X 6 G.. 6 [ X
. ) 6 3 ; 6 ;, G E E W T S W X D ^ L J R Y [ _ ` E ) '" " " -, 7 4-4 4-4 ; ; 7 4 4 4 4 4 ;= : " B C CA BA " ) 3D H E V U T T V e g em D e j ) a S D } a o "m ek j g ed b m "d mq m [ d, ) W X 6 G.. 6 [ X
Life After Study Abroad
 f oe oab o C P p H book F 6 F Y 6 7 P5-URF : P os S yab o C Op p o s I f o m o sb o s soff b y 6 ss b j o g P o ob yd P g o( T5 7 N os ) k Rom I y Lf Af Sy Abo INTRODUCTION Pps yo'v b ookg fow o sy bo
f oe oab o C P p H book F 6 F Y 6 7 P5-URF : P os S yab o C Op p o s I f o m o sb o s soff b y 6 ss b j o g P o ob yd P g o( T5 7 N os ) k Rom I y Lf Af Sy Abo INTRODUCTION Pps yo'v b ookg fow o sy bo