Teaching parametric equations using graphing technology
|
|
|
- Edith Matthews
- 5 years ago
- Views:
Transcription
1
2 Teaching parameric equaions using graphing echnology The session will sar by looking a problems which help sudens o see ha parameric equaions are no here o make life difficul bu are imporan and give rise o some beauiful curves. Then we will look a ways in which graphing echnology (calculaors, GeoGebra and Auograph) can help sudens make sense of parameric curves for hemselves. Suiable for all eachers who have augh parameric equaions in A level Mahemaics.
3 Teaching parameric equaions using graphing echnology Wich of Agnesi and cycloids: learn he calculaor funcionaliy wih some nice mahs. Cards aciviy: hinking how calculaors can deepen undersanding, supporing learning in class. 07 SAMs quesions: hinking how calculaors can suppor exam echnique. Inroducing paramerics using GeoGebra. A few invesigaions.

4 The Wich of Agnesi Maria Agnesi, hps://
5 The Wich of Agnesi There has been much argumen over he reason why he curve is called a 'wich'. In 78 Guido Grandi (67-74, an Ialian Jesui who worked on geomery and hydraulics) gave i he Lain name 'versoria' which means 'rope ha urns a sail' and he so named i because of is shape. Grandi gave he Ialian 'versiera' for he Lain 'versoria' and indeed Agnesi quie correcly saes in her book ha he curve was called 'la versiera'. John Colson ranslaed Agnesi's Insiuzioni analiiche ad uso della giovenù ialiana ino English [and] misook 'la versiera' for 'l'aversiera' which means 'he wich' or 'he she-devil'. hp://www-hisory.mcs.s-and.ac.uk/
6 Cycloids x at asint y a a cost hps://
7
8
9
10
11
12 hps://
13 Abou MEI Regisered chariy commied o improving mahemaics educaion Independen UK curriculum developmen bo We offer coninuing professional developmen courses, provide specialis uiion for sudens and work wih employers o enhance mahemaical skills in he workplace We also pioneer he developmen of innovaive eaching and learning resources

14 MEI Conference 07 Teaching parameric equaions using graphing echnology Bernard Murphy

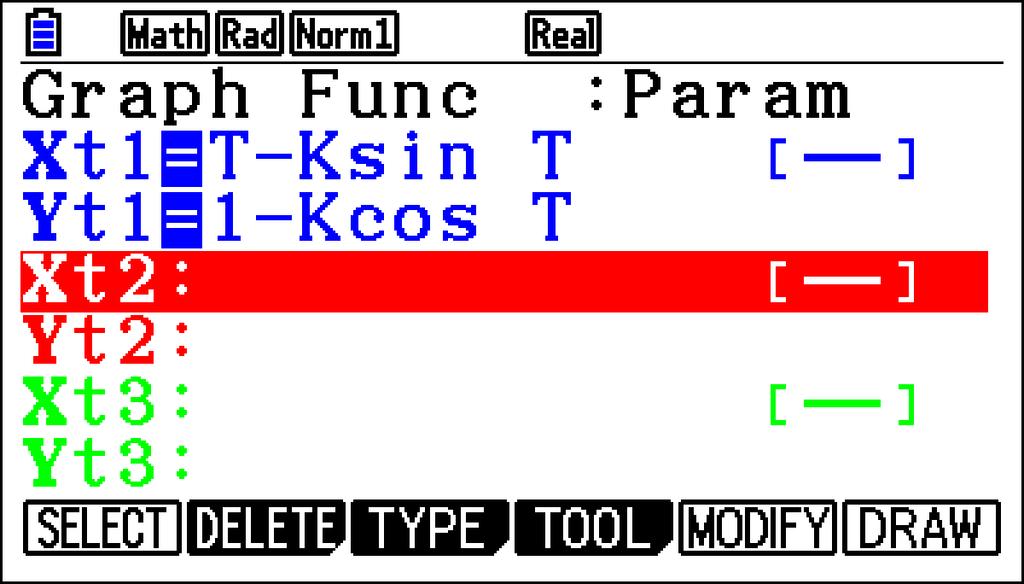
15 The Wich of Agnesi and he Casio fx-cg0 The circle has radius and cenre 0,. The poin A moves along he line y. The line OA, which makes an angle T wih he y -axis, mees he circle a B. Lines BP and PA are parallel o he axes. Wha is he locus of P? Firs rese your calculaor o facory seings:pazywqd. Add a new Graphs screen: p5. Se he graph ype o Parameric: ee 3. Draw he graph x an T, y cos T : kfl(jf)slu 4. Experimen wih he V-Window Le o se appropriae ranges for X, Y and T. Afer each one use l and end wihd. 5. By eliminaing he parameer, find he Caresian equaion of his curve. See if you re righ by enering his on your calculaor, firs seing he graph ype o Caresian: deq

. When C has coordinaes at, a, P has coordinaes at asin T, a a cost.")
16 Cycloids A wheel rolls along a fla surface wihou slipping. A poin P is on he circumference of he wheel. Wha is he equaion of he pah of P? Le he poin P on he rim sar a he origin, O. The diagram shows he posiion of he wheel afer i has rolled a disance o he righ. Since here is no slipping, he horizonal disance moved along he road, OA, mus be he same as he disance PA on he wheel rim. OA = PA = at (where T is measured in radians). When C has coordinaes at, a, P has coordinaes at asin T, a a cost. So he pah of P can be described by parameric equaions: x at asin T, y a a cost Invesigae he locus of oher poins along he radius.
17 x d y 3 6 d, gives he poin (3,3) A, 6 x 4 y ln d d, gives he poin (4,0) A, d x x d 3 y d d y 3, gives he poin (,) 3 A, d x x d y d, gives he poin (,) A, x 4 4 d y d, gives he poin (5,) A, d x 6 x 3 3 d y d 3, gives he poin (4,) A, d x 3 x 4 4 d y d, gives he poin (5,) A, d x 3
18 Tangens o parameric curves (Adaped from a resource from hp:// ). Add a new Graphs screen: p5. Se Derivaive: On and Angle: Radians: LpNNNNNNqNNNNwd 3. Se he graph Type o Parameric: ee (You migh wan o delee exising funcions here.) 4. Use V-Window o se he range of T o Tmin: -3, Tmax: 3, pich: 0.05 LeNNNNNNNn3l3l0.05ld 5. Draw he graph x y 3,. X=T², Y=T³: fslf^3lu 6. Add he angen a he poin (Skech > Tangen): rw Use!/$ o move he posiion of he poin on he curve or choose a value using f. Quesions Wha is he relaionship beween d y, d x and d y d d? Can you verify his algebraically for some oher parameric curves? Problem (Check your answer by ploing he graph and he angen on your calculaor) Find he coordinaes of he poins on he curve x cos, y sin, 0 for which he angen o he curve is parallel o he x axis. Furher Tasks Explore how you can find he equaion of he angen o a parameric curve a a poin. Describe how o find he angen o a parameric curve ha passes hrough a specific poin ha is no on he curve.


19 Firs rese your calculaor o facory seings:pazywqd. Add a new Graphs screen: p5. Se he graph ype o Parameric: ee 3 3. Draw he graph x, y 4 7 : f-l4f-7+3mflu 4. Experimen wih he V-Window Le o se appropriae ranges for X, Y and T. Afer each one hi l and end wih d. 5. Se he graph ype o Caresian deqand eiher eliminae he parameer o find he Caresian equaion of his curve or experimen using he modify command: (fs+aff+ag)m(f+)ly 6. Using he cursors change he values of A and B o view he resuling graph.
: Lrw and use!")
20 . Add a new Graphs screen: p5. Se Derivaive: On and Angle: Radians: LpNNNNNNqNNNNwd 3. Se he graph Type o Parameric: ee (You migh wan o delee exising funcions here.) 4. Use V-Window o se appropriae ranges for x, y and T using Le he N cursor, l afer each enry and d o finish. 5. Ener x cos, y sin and u o draw. 6. Add he angen a he poin (Skech > Tangen): Lrw and use!/$ o move he posiion of he poin on he curve or choose a value using f.
21
22 Invesigaion Imagine wo poins, P and Q, on a uni circle. They sar from,0 and go a consan speeds in he same direcion round he circle bu Q goes wice as fas as P. Now hink abou he chord PQ. Is lengh is changing coninuously. Wha pah is followed by he midpoin, M, of PQ? Wha if he raio of he speeds of P and Q was differen? Wha if P and Q wen in differen direcions? Wha pah is followed by he poin N on he chord where PN PQ? 3 Poin P is on he line y. Invesigaion A circle cenred on P ouches he uni circle as shown. The radius PQ is parallel o he x axis. As P moves along he line y, wha is he pah raced ou by poin Q? Invesigaion 3 Using your graphing calculaor, invesigae curves wih parameric equaions x 3cos cos k, y 3sin sin k For which values of k do you ge a dimple?...a cusp?...crossover poins? Find he coordinaes of poins where he angen is parallel o an axis. Wha oher properies could you explore?
23 x x x 4 x 4 x x 3 x 4 y y 3 y ln y y 3 y y
24 d d 3 d 4 d d 4 d d d d d 3 d d 3 d 6 d
25 A, A, d x 3 3 A, d x A, 6 A, d x A, d x 3 A, d x 6, gives he poin (,), gives he poin (4,0), gives he poin (,), gives he poin (3,3), gives he poin (5,), gives he poin (4,), gives he poin (5,)
Math 116 Practice for Exam 2
 Mah 6 Pracice for Exam Generaed Ocober 3, 7 Name: SOLUTIONS Insrucor: Secion Number:. This exam has 5 quesions. Noe ha he problems are no of equal difficuly, so you may wan o skip over and reurn o a problem
Mah 6 Pracice for Exam Generaed Ocober 3, 7 Name: SOLUTIONS Insrucor: Secion Number:. This exam has 5 quesions. Noe ha he problems are no of equal difficuly, so you may wan o skip over and reurn o a problem
The equation to any straight line can be expressed in the form:
 Sring Graphs Par 1 Answers 1 TI-Nspire Invesigaion Suden min Aims Deermine a series of equaions of sraigh lines o form a paern similar o ha formed by he cables on he Jerusalem Chords Bridge. Deermine he
Sring Graphs Par 1 Answers 1 TI-Nspire Invesigaion Suden min Aims Deermine a series of equaions of sraigh lines o form a paern similar o ha formed by he cables on he Jerusalem Chords Bridge. Deermine he
10.1 EXERCISES. y 2 t 2. y 1 t y t 3. y e
 66 CHAPTER PARAMETRIC EQUATINS AND PLAR CRDINATES SLUTIN We use a graphing device o produce he graphs for he cases a,,.5,.,,.5,, and shown in Figure 7. Noice ha all of hese curves (ecep he case a ) have
66 CHAPTER PARAMETRIC EQUATINS AND PLAR CRDINATES SLUTIN We use a graphing device o produce he graphs for he cases a,,.5,.,,.5,, and shown in Figure 7. Noice ha all of hese curves (ecep he case a ) have
Parametrics and Vectors (BC Only)
") Paramerics and Vecors (BC Only) The following relaionships should be learned and memorized. The paricle s posiion vecor is r() x(), y(). The velociy vecor is v(),. The speed is he magniude of he velociy
Paramerics and Vecors (BC Only) The following relaionships should be learned and memorized. The paricle s posiion vecor is r() x(), y(). The velociy vecor is v(),. The speed is he magniude of he velociy
Check in: 1 If m = 2(x + 1) and n = find y when. b y = 2m n 2
 and n = find y when. b y = 2m n 2") 7 Parameric equaions This chaer will show ou how o skech curves using heir arameric equaions conver arameric equaions o Caresian equaions find oins of inersecion of curves and lines using arameric equaions
7 Parameric equaions This chaer will show ou how o skech curves using heir arameric equaions conver arameric equaions o Caresian equaions find oins of inersecion of curves and lines using arameric equaions
!!"#"$%&#'()!"#&'(*%)+,&',-)./0)1-*23)
!#&'(*%)+,&',-)./0)1-*23)") "#"$%&#'()"#&'(*%)+,&',-)./)1-*) #$%&'()*+,&',-.%,/)*+,-&1*#$)()5*6$+$%*,7&*-'-&1*(,-&*6&,7.$%$+*&%'(*8$&',-,%'-&1*(,-&*6&,79*(&,%: ;..,*&1$&$.$%&'()*1$$.,'&',-9*(&,%)?%*,('&5
"#"$%&#'()"#&'(*%)+,&',-)./)1-*) #$%&'()*+,&',-.%,/)*+,-&1*#$)()5*6$+$%*,7&*-'-&1*(,-&*6&,7.$%$+*&%'(*8$&',-,%'-&1*(,-&*6&,79*(&,%: ;..,*&1$&$.$%&'()*1$$.,'&',-9*(&,%)?%*,('&5
Yimin Math Centre. 4 Unit Math Homework for Year 12 (Worked Answers) 4.1 Further Geometric Properties of the Ellipse and Hyperbola...
 4.1 Further Geometric Properties of the Ellipse and Hyperbola...") 4 Uni Mah Homework for Year 12 (Worked Answers) Suden Name: Grade: Dae: Score: Table of conens 4 Topic 2 Conics (Par 4) 1 4.1 Furher Geomeric Properies of he Ellipse and Hyperbola............... 1 4.2
4 Uni Mah Homework for Year 12 (Worked Answers) Suden Name: Grade: Dae: Score: Table of conens 4 Topic 2 Conics (Par 4) 1 4.1 Furher Geomeric Properies of he Ellipse and Hyperbola............... 1 4.2
15. Bicycle Wheel. Graph of height y (cm) above the axle against time t (s) over a 6-second interval. 15 bike wheel
 above the axle against time t (s) over a 6-second interval. 15 bike wheel") 15. Biccle Wheel The graph We moun a biccle wheel so ha i is free o roae in a verical plane. In fac, wha works easil is o pu an exension on one of he axles, and ge a suden o sand on one side and hold he
15. Biccle Wheel The graph We moun a biccle wheel so ha i is free o roae in a verical plane. In fac, wha works easil is o pu an exension on one of he axles, and ge a suden o sand on one side and hold he
Math 116 Second Midterm March 21, 2016
 Mah 6 Second Miderm March, 06 UMID: EXAM SOLUTIONS Iniials: Insrucor: Secion:. Do no open his exam unil you are old o do so.. Do no wrie your name anywhere on his exam. 3. This exam has pages including
Mah 6 Second Miderm March, 06 UMID: EXAM SOLUTIONS Iniials: Insrucor: Secion:. Do no open his exam unil you are old o do so.. Do no wrie your name anywhere on his exam. 3. This exam has pages including
Math 105 Second Midterm March 16, 2017
 Mah 105 Second Miderm March 16, 2017 UMID: Insrucor: Iniials: Secion: 1. Do no open his exam unil you are old o do so. 2. Do no wrie your name anywhere on his exam. 3. This exam has 9 pages including his
Mah 105 Second Miderm March 16, 2017 UMID: Insrucor: Iniials: Secion: 1. Do no open his exam unil you are old o do so. 2. Do no wrie your name anywhere on his exam. 3. This exam has 9 pages including his
15. Vector Valued Functions
 1. Vecor Valued Funcions Up o his poin, we have presened vecors wih consan componens, for example, 1, and,,4. However, we can allow he componens of a vecor o be funcions of a common variable. For example,
1. Vecor Valued Funcions Up o his poin, we have presened vecors wih consan componens, for example, 1, and,,4. However, we can allow he componens of a vecor o be funcions of a common variable. For example,
2.7. Some common engineering functions. Introduction. Prerequisites. Learning Outcomes
 Some common engineering funcions 2.7 Inroducion This secion provides a caalogue of some common funcions ofen used in Science and Engineering. These include polynomials, raional funcions, he modulus funcion
Some common engineering funcions 2.7 Inroducion This secion provides a caalogue of some common funcions ofen used in Science and Engineering. These include polynomials, raional funcions, he modulus funcion
Chapters 6 & 7: Trigonometric Functions of Angles and Real Numbers. Divide both Sides by 180
 Algebra Chapers & : Trigonomeric Funcions of Angles and Real Numbers Chapers & : Trigonomeric Funcions of Angles and Real Numbers - Angle Measures Radians: - a uni (rad o measure he size of an angle. rad
Algebra Chapers & : Trigonomeric Funcions of Angles and Real Numbers Chapers & : Trigonomeric Funcions of Angles and Real Numbers - Angle Measures Radians: - a uni (rad o measure he size of an angle. rad
10.6 Parametric Equations
 0_006.qd /8/05 9:05 AM Page 77 Secion 0.6 77 Parameric Equaions 0.6 Parameric Equaions Wha ou should learn Evaluae ses of parameric equaions for given values of he parameer. Skech curves ha are represened
0_006.qd /8/05 9:05 AM Page 77 Secion 0.6 77 Parameric Equaions 0.6 Parameric Equaions Wha ou should learn Evaluae ses of parameric equaions for given values of he parameer. Skech curves ha are represened
3, so θ = arccos
 Mahemaics 210 Professor Alan H Sein Monday, Ocober 1, 2007 SOLUTIONS This problem se is worh 50 poins 1 Find he angle beween he vecors (2, 7, 3) and (5, 2, 4) Soluion: Le θ be he angle (2, 7, 3) (5, 2,
Mahemaics 210 Professor Alan H Sein Monday, Ocober 1, 2007 SOLUTIONS This problem se is worh 50 poins 1 Find he angle beween he vecors (2, 7, 3) and (5, 2, 4) Soluion: Le θ be he angle (2, 7, 3) (5, 2,
Solutionbank Edexcel AS and A Level Modular Mathematics
 Page of 4 Soluionbank Edexcel AS and A Level Modular Mahemaics Exercise A, Quesion Quesion: Skech he graphs of (a) y = e x + (b) y = 4e x (c) y = e x 3 (d) y = 4 e x (e) y = 6 + 0e x (f) y = 00e x + 0
Page of 4 Soluionbank Edexcel AS and A Level Modular Mahemaics Exercise A, Quesion Quesion: Skech he graphs of (a) y = e x + (b) y = 4e x (c) y = e x 3 (d) y = 4 e x (e) y = 6 + 0e x (f) y = 00e x + 0
Lecture 2-1 Kinematics in One Dimension Displacement, Velocity and Acceleration Everything in the world is moving. Nothing stays still.
 Lecure - Kinemaics in One Dimension Displacemen, Velociy and Acceleraion Everyhing in he world is moving. Nohing says sill. Moion occurs a all scales of he universe, saring from he moion of elecrons in
Lecure - Kinemaics in One Dimension Displacemen, Velociy and Acceleraion Everyhing in he world is moving. Nohing says sill. Moion occurs a all scales of he universe, saring from he moion of elecrons in
AP CALCULUS BC 2016 SCORING GUIDELINES
 6 SCORING GUIDELINES Quesion A ime, he posiion of a paricle moving in he xy-plane is given by he parameric funcions ( x ( ), y ( )), where = + sin ( ). The graph of y, consising of hree line segmens, is
6 SCORING GUIDELINES Quesion A ime, he posiion of a paricle moving in he xy-plane is given by he parameric funcions ( x ( ), y ( )), where = + sin ( ). The graph of y, consising of hree line segmens, is
Be able to sketch a function defined parametrically. (by hand and by calculator)
") Pre Calculus Uni : Parameric and Polar Equaions (7) Te References: Pre Calculus wih Limis; Larson, Hoseler, Edwards. B he end of he uni, ou should be able o complee he problems below. The eacher ma provide
Pre Calculus Uni : Parameric and Polar Equaions (7) Te References: Pre Calculus wih Limis; Larson, Hoseler, Edwards. B he end of he uni, ou should be able o complee he problems below. The eacher ma provide
Increase Our Learning Horizon with Evolving Technology
 Increase Our Learning Horizon wih Evolving Technology Wei-Chi Yang Radford Universiy Radford, Virginia 24142, USA e-mail: wyang@radford.edu Asrac. In his shor noe, we demonsrae how evolving echnological
Increase Our Learning Horizon wih Evolving Technology Wei-Chi Yang Radford Universiy Radford, Virginia 24142, USA e-mail: wyang@radford.edu Asrac. In his shor noe, we demonsrae how evolving echnological
AP Calculus BC Chapter 10 Part 1 AP Exam Problems
 AP Calculus BC Chaper Par AP Eam Problems All problems are NO CALCULATOR unless oherwise indicaed Parameric Curves and Derivaives In he y plane, he graph of he parameric equaions = 5 + and y= for, is a
AP Calculus BC Chaper Par AP Eam Problems All problems are NO CALCULATOR unless oherwise indicaed Parameric Curves and Derivaives In he y plane, he graph of he parameric equaions = 5 + and y= for, is a
Answers to 1 Homework
 Answers o Homework. x + and y x 5 y To eliminae he parameer, solve for x. Subsiue ino y s equaion o ge y x.. x and y, x y x To eliminae he parameer, solve for. Subsiue ino y s equaion o ge x y, x. (Noe:
Answers o Homework. x + and y x 5 y To eliminae he parameer, solve for x. Subsiue ino y s equaion o ge y x.. x and y, x y x To eliminae he parameer, solve for. Subsiue ino y s equaion o ge x y, x. (Noe:
Kinematics Vocabulary. Kinematics and One Dimensional Motion. Position. Coordinate System in One Dimension. Kinema means movement 8.
 Kinemaics Vocabulary Kinemaics and One Dimensional Moion 8.1 WD1 Kinema means movemen Mahemaical descripion of moion Posiion Time Inerval Displacemen Velociy; absolue value: speed Acceleraion Averages
Kinemaics Vocabulary Kinemaics and One Dimensional Moion 8.1 WD1 Kinema means movemen Mahemaical descripion of moion Posiion Time Inerval Displacemen Velociy; absolue value: speed Acceleraion Averages
SPH3U: Projectiles. Recorder: Manager: Speaker:
 SPH3U: Projeciles Now i s ime o use our new skills o analyze he moion of a golf ball ha was ossed hrough he air. Le s find ou wha is special abou he moion of a projecile. Recorder: Manager: Speaker: 0
SPH3U: Projeciles Now i s ime o use our new skills o analyze he moion of a golf ball ha was ossed hrough he air. Le s find ou wha is special abou he moion of a projecile. Recorder: Manager: Speaker: 0
AP Calculus BC 2004 Free-Response Questions Form B
 AP Calculus BC 200 Free-Response Quesions Form B The maerials included in hese files are inended for noncommercial use by AP eachers for course and exam preparaion; permission for any oher use mus be sough
AP Calculus BC 200 Free-Response Quesions Form B The maerials included in hese files are inended for noncommercial use by AP eachers for course and exam preparaion; permission for any oher use mus be sough
1 Differential Equation Investigations using Customizable
 Differenial Equaion Invesigaions using Cusomizable Mahles Rober Decker The Universiy of Harford Absrac. The auhor has developed some plaform independen, freely available, ineracive programs (mahles) for
Differenial Equaion Invesigaions using Cusomizable Mahles Rober Decker The Universiy of Harford Absrac. The auhor has developed some plaform independen, freely available, ineracive programs (mahles) for
PROBLEMS FOR MATH 162 If a problem is starred, all subproblems are due. If only subproblems are starred, only those are due. SLOPES OF TANGENT LINES
 PROBLEMS FOR MATH 6 If a problem is sarred, all subproblems are due. If onl subproblems are sarred, onl hose are due. 00. Shor answer quesions. SLOPES OF TANGENT LINES (a) A ball is hrown ino he air. Is
PROBLEMS FOR MATH 6 If a problem is sarred, all subproblems are due. If onl subproblems are sarred, onl hose are due. 00. Shor answer quesions. SLOPES OF TANGENT LINES (a) A ball is hrown ino he air. Is
Math 111 Midterm I, Lecture A, version 1 -- Solutions January 30 th, 2007
 NAME: Suden ID #: QUIZ SECTION: Mah 111 Miderm I, Lecure A, version 1 -- Soluions January 30 h, 2007 Problem 1 4 Problem 2 6 Problem 3 20 Problem 4 20 Toal: 50 You are allowed o use a calculaor, a ruler,
NAME: Suden ID #: QUIZ SECTION: Mah 111 Miderm I, Lecure A, version 1 -- Soluions January 30 h, 2007 Problem 1 4 Problem 2 6 Problem 3 20 Problem 4 20 Toal: 50 You are allowed o use a calculaor, a ruler,
Starting from a familiar curve
 In[]:= NoebookDirecory Ou[]= C:\Dropbox\Work\myweb\Courses\Mah_pages\Mah_5\ You can evaluae he enire noebook by using he keyboard shorcu Al+v o, or he menu iem Evaluaion Evaluae Noebook. Saring from a
In[]:= NoebookDirecory Ou[]= C:\Dropbox\Work\myweb\Courses\Mah_pages\Mah_5\ You can evaluae he enire noebook by using he keyboard shorcu Al+v o, or he menu iem Evaluaion Evaluae Noebook. Saring from a
TEACHER NOTES MATH NSPIRED
 Naural Logarihm Mah Objecives Sudens will undersand he definiion of he naural logarihm funcion in erms of a definie inegral. Sudens will be able o use his definiion o relae he value of he naural logarihm
Naural Logarihm Mah Objecives Sudens will undersand he definiion of he naural logarihm funcion in erms of a definie inegral. Sudens will be able o use his definiion o relae he value of he naural logarihm
AP Calculus BC - Parametric equations and vectors Chapter 9- AP Exam Problems solutions
 AP Calculus BC - Parameric equaions and vecors Chaper 9- AP Exam Problems soluions. A 5 and 5. B A, 4 + 8. C A, 4 + 4 8 ; he poin a is (,). y + ( x ) x + 4 4. e + e D A, slope.5 6 e e e 5. A d hus d d
AP Calculus BC - Parameric equaions and vecors Chaper 9- AP Exam Problems soluions. A 5 and 5. B A, 4 + 8. C A, 4 + 4 8 ; he poin a is (,). y + ( x ) x + 4 4. e + e D A, slope.5 6 e e e 5. A d hus d d
KINEMATICS IN ONE DIMENSION
 KINEMATICS IN ONE DIMENSION PREVIEW Kinemaics is he sudy of how hings move how far (disance and displacemen), how fas (speed and velociy), and how fas ha how fas changes (acceleraion). We say ha an objec
KINEMATICS IN ONE DIMENSION PREVIEW Kinemaics is he sudy of how hings move how far (disance and displacemen), how fas (speed and velociy), and how fas ha how fas changes (acceleraion). We say ha an objec
ADDITIONAL MATHEMATICS PAPER 1
 000-CE A MATH PAPER HONG KONG EXAMINATIONS AUTHORITY HONG KONG CERTIFICATE OF EDUCATION EXAMINATION 000 ADDITIONAL MATHEMATICS PAPER 8.0 am 0.0 am ( hours This paper mus be answered in English. Answer
000-CE A MATH PAPER HONG KONG EXAMINATIONS AUTHORITY HONG KONG CERTIFICATE OF EDUCATION EXAMINATION 000 ADDITIONAL MATHEMATICS PAPER 8.0 am 0.0 am ( hours This paper mus be answered in English. Answer
The average rate of change between two points on a function is d t
 SM Dae: Secion: Objecive: The average rae of change beween wo poins on a funcion is d. For example, if he funcion ( ) represens he disance in miles ha a car has raveled afer hours, hen finding he slope
SM Dae: Secion: Objecive: The average rae of change beween wo poins on a funcion is d. For example, if he funcion ( ) represens he disance in miles ha a car has raveled afer hours, hen finding he slope
INSTANTANEOUS VELOCITY
 INSTANTANEOUS VELOCITY I claim ha ha if acceleraion is consan, hen he elociy is a linear funcion of ime and he posiion a quadraic funcion of ime. We wan o inesigae hose claims, and a he same ime, work
INSTANTANEOUS VELOCITY I claim ha ha if acceleraion is consan, hen he elociy is a linear funcion of ime and he posiion a quadraic funcion of ime. We wan o inesigae hose claims, and a he same ime, work
Let us start with a two dimensional case. We consider a vector ( x,
 Roaion marices We consider now roaion marices in wo and hree dimensions. We sar wih wo dimensions since wo dimensions are easier han hree o undersand, and one dimension is a lile oo simple. However, our
Roaion marices We consider now roaion marices in wo and hree dimensions. We sar wih wo dimensions since wo dimensions are easier han hree o undersand, and one dimension is a lile oo simple. However, our
MEI STRUCTURED MATHEMATICS 4758
 OXFORD CAMBRIDGE AND RSA EXAMINATIONS Advanced Subsidiary General Cerificae of Educaion Advanced General Cerificae of Educaion MEI STRUCTURED MATHEMATICS 4758 Differenial Equaions Thursday 5 JUNE 006 Afernoon
OXFORD CAMBRIDGE AND RSA EXAMINATIONS Advanced Subsidiary General Cerificae of Educaion Advanced General Cerificae of Educaion MEI STRUCTURED MATHEMATICS 4758 Differenial Equaions Thursday 5 JUNE 006 Afernoon
1.6. Slopes of Tangents and Instantaneous Rate of Change
 1.6 Slopes of Tangens and Insananeous Rae of Change When you hi or kick a ball, he heigh, h, in meres, of he ball can be modelled by he equaion h() 4.9 2 v c. In his equaion, is he ime, in seconds; c represens
1.6 Slopes of Tangens and Insananeous Rae of Change When you hi or kick a ball, he heigh, h, in meres, of he ball can be modelled by he equaion h() 4.9 2 v c. In his equaion, is he ime, in seconds; c represens
Decimal moved after first digit = 4.6 x Decimal moves five places left SCIENTIFIC > POSITIONAL. a) g) 5.31 x b) 0.
 g) 5.31 x b) 0.") PHYSICS 20 UNIT 1 SCIENCE MATH WORKSHEET NAME: A. Sandard Noaion Very large and very small numbers are easily wrien using scienific (or sandard) noaion, raher han decimal (or posiional) noaion. Sandard
PHYSICS 20 UNIT 1 SCIENCE MATH WORKSHEET NAME: A. Sandard Noaion Very large and very small numbers are easily wrien using scienific (or sandard) noaion, raher han decimal (or posiional) noaion. Sandard
PMT. Version 1.0: abc. General Certificate of Education. Mathematics MPC4 Pure Core 4. Mark Scheme examination - January series
 Version.: 8 abc General Cerificae of Educaion Mahemaics 66 MPC Pure Core Mark Scheme 8 eaminaion - January series Mark schemes are prepared by he Principal Eaminer and considered, ogeher wih he relevan
Version.: 8 abc General Cerificae of Educaion Mahemaics 66 MPC Pure Core Mark Scheme 8 eaminaion - January series Mark schemes are prepared by he Principal Eaminer and considered, ogeher wih he relevan
Physics 101 Fall 2006: Exam #1- PROBLEM #1
 Physics 101 Fall 2006: Exam #1- PROBLEM #1 1. Problem 1. (+20 ps) (a) (+10 ps) i. +5 ps graph for x of he rain vs. ime. The graph needs o be parabolic and concave upward. ii. +3 ps graph for x of he person
Physics 101 Fall 2006: Exam #1- PROBLEM #1 1. Problem 1. (+20 ps) (a) (+10 ps) i. +5 ps graph for x of he rain vs. ime. The graph needs o be parabolic and concave upward. ii. +3 ps graph for x of he person
4.5 Constant Acceleration
 4.5 Consan Acceleraion v() v() = v 0 + a a() a a() = a v 0 Area = a (a) (b) Figure 4.8 Consan acceleraion: (a) velociy, (b) acceleraion When he x -componen of he velociy is a linear funcion (Figure 4.8(a)),
4.5 Consan Acceleraion v() v() = v 0 + a a() a a() = a v 0 Area = a (a) (b) Figure 4.8 Consan acceleraion: (a) velociy, (b) acceleraion When he x -componen of he velociy is a linear funcion (Figure 4.8(a)),
Applications of the Basic Equations Chapter 3. Paul A. Ullrich
 Applicaions of he Basic Equaions Chaper 3 Paul A. Ullrich paullrich@ucdavis.edu Par 1: Naural Coordinaes Naural Coordinaes Quesion: Why do we need anoher coordinae sysem? Our goal is o simplify he equaions
Applicaions of he Basic Equaions Chaper 3 Paul A. Ullrich paullrich@ucdavis.edu Par 1: Naural Coordinaes Naural Coordinaes Quesion: Why do we need anoher coordinae sysem? Our goal is o simplify he equaions
Lesson 3.1 Recursive Sequences
 Lesson 3.1 Recursive Sequences 1) 1. Evaluae he epression 2(3 for each value of. a. 9 b. 2 c. 1 d. 1 2. Consider he sequence of figures made from riangles. Figure 1 Figure 2 Figure 3 Figure a. Complee
Lesson 3.1 Recursive Sequences 1) 1. Evaluae he epression 2(3 for each value of. a. 9 b. 2 c. 1 d. 1 2. Consider he sequence of figures made from riangles. Figure 1 Figure 2 Figure 3 Figure a. Complee
x i v x t a dx dt t x
 Physics 3A: Basic Physics I Shoup - Miderm Useful Equaions A y A sin A A A y an A y A A = A i + A y j + A z k A * B = A B cos(θ) A B = A B sin(θ) A * B = A B + A y B y + A z B z A B = (A y B z A z B y
Physics 3A: Basic Physics I Shoup - Miderm Useful Equaions A y A sin A A A y an A y A A = A i + A y j + A z k A * B = A B cos(θ) A B = A B sin(θ) A * B = A B + A y B y + A z B z A B = (A y B z A z B y
Roller-Coaster Coordinate System
 Winer 200 MECH 220: Mechanics 2 Roller-Coaser Coordinae Sysem Imagine you are riding on a roller-coaer in which he rack goes up and down, wiss and urns. Your velociy and acceleraion will change (quie abruply),
Winer 200 MECH 220: Mechanics 2 Roller-Coaser Coordinae Sysem Imagine you are riding on a roller-coaer in which he rack goes up and down, wiss and urns. Your velociy and acceleraion will change (quie abruply),
2002 November 14 Exam III Physics 191
 November 4 Exam III Physics 9 Physical onsans: Earh s free-fall acceleraion = g = 9.8 m/s ircle he leer of he single bes answer. quesion is worh poin Each 3. Four differen objecs wih masses: m = kg, m
November 4 Exam III Physics 9 Physical onsans: Earh s free-fall acceleraion = g = 9.8 m/s ircle he leer of he single bes answer. quesion is worh poin Each 3. Four differen objecs wih masses: m = kg, m
a. Show that these lines intersect by finding the point of intersection. b. Find an equation for the plane containing these lines.
 Mah A Final Eam Problems for onsideraion. Show all work for credi. Be sure o show wha you know. Given poins A(,,, B(,,, (,, 4 and (,,, find he volume of he parallelepiped wih adjacen edges AB, A, and A.
Mah A Final Eam Problems for onsideraion. Show all work for credi. Be sure o show wha you know. Given poins A(,,, B(,,, (,, 4 and (,,, find he volume of he parallelepiped wih adjacen edges AB, A, and A.
Displacement ( x) x x x
 x x x") Kinemaics Kinemaics is he branch of mechanics ha describes he moion of objecs wihou necessarily discussing wha causes he moion. 1-Dimensional Kinemaics (or 1- Dimensional moion) refers o moion in a sraigh
Kinemaics Kinemaics is he branch of mechanics ha describes he moion of objecs wihou necessarily discussing wha causes he moion. 1-Dimensional Kinemaics (or 1- Dimensional moion) refers o moion in a sraigh
Position, Velocity, and Acceleration
 rev 06/2017 Posiion, Velociy, and Acceleraion Equipmen Qy Equipmen Par Number 1 Dynamic Track ME-9493 1 Car ME-9454 1 Fan Accessory ME-9491 1 Moion Sensor II CI-6742A 1 Track Barrier Purpose The purpose
rev 06/2017 Posiion, Velociy, and Acceleraion Equipmen Qy Equipmen Par Number 1 Dynamic Track ME-9493 1 Car ME-9454 1 Fan Accessory ME-9491 1 Moion Sensor II CI-6742A 1 Track Barrier Purpose The purpose
Traveling Waves. Chapter Introduction
 Chaper 4 Traveling Waves 4.1 Inroducion To dae, we have considered oscillaions, i.e., periodic, ofen harmonic, variaions of a physical characerisic of a sysem. The sysem a one ime is indisinguishable from
Chaper 4 Traveling Waves 4.1 Inroducion To dae, we have considered oscillaions, i.e., periodic, ofen harmonic, variaions of a physical characerisic of a sysem. The sysem a one ime is indisinguishable from
Physics 3A: Basic Physics I Shoup Sample Midterm. Useful Equations. x f. x i v x. a x. x i. v xi v xf. 2a x f x i. y f. a r.
 Physics 3A: Basic Physics I Shoup Sample Miderm Useful Equaions A y Asin A A x A y an A y A x A = A x i + A y j + A z k A * B = A B cos(θ) A x B = A B sin(θ) A * B = A x B x + A y B y + A z B z A x B =
Physics 3A: Basic Physics I Shoup Sample Miderm Useful Equaions A y Asin A A x A y an A y A x A = A x i + A y j + A z k A * B = A B cos(θ) A x B = A B sin(θ) A * B = A x B x + A y B y + A z B z A x B =
Some Basic Information about M-S-D Systems
 Some Basic Informaion abou M-S-D Sysems 1 Inroducion We wan o give some summary of he facs concerning unforced (homogeneous) and forced (non-homogeneous) models for linear oscillaors governed by second-order,
Some Basic Informaion abou M-S-D Sysems 1 Inroducion We wan o give some summary of he facs concerning unforced (homogeneous) and forced (non-homogeneous) models for linear oscillaors governed by second-order,
Spot the Physics. Dionysis Konstantinou Damjan Štrus
 Spo he Physics Dionysis Konsaninou Damjan Šrus Spo he Physics 61 1 Summary In his uni we presen a few examples of how sudens can use smarphones o conduc physical video analysis of differen physical evens
Spo he Physics Dionysis Konsaninou Damjan Šrus Spo he Physics 61 1 Summary In his uni we presen a few examples of how sudens can use smarphones o conduc physical video analysis of differen physical evens
3.6 Derivatives as Rates of Change
 3.6 Derivaives as Raes of Change Problem 1 John is walking along a sraigh pah. His posiion a he ime >0 is given by s = f(). He sars a =0from his house (f(0) = 0) and he graph of f is given below. (a) Describe
3.6 Derivaives as Raes of Change Problem 1 John is walking along a sraigh pah. His posiion a he ime >0 is given by s = f(). He sars a =0from his house (f(0) = 0) and he graph of f is given below. (a) Describe
Phys 221 Fall Chapter 2. Motion in One Dimension. 2014, 2005 A. Dzyubenko Brooks/Cole
 Phys 221 Fall 2014 Chaper 2 Moion in One Dimension 2014, 2005 A. Dzyubenko 2004 Brooks/Cole 1 Kinemaics Kinemaics, a par of classical mechanics: Describes moion in erms of space and ime Ignores he agen
Phys 221 Fall 2014 Chaper 2 Moion in One Dimension 2014, 2005 A. Dzyubenko 2004 Brooks/Cole 1 Kinemaics Kinemaics, a par of classical mechanics: Describes moion in erms of space and ime Ignores he agen
t is a basis for the solution space to this system, then the matrix having these solutions as columns, t x 1 t, x 2 t,... x n t x 2 t...
 Mah 228- Fri Mar 24 5.6 Marix exponenials and linear sysems: The analogy beween firs order sysems of linear differenial equaions (Chaper 5) and scalar linear differenial equaions (Chaper ) is much sronger
Mah 228- Fri Mar 24 5.6 Marix exponenials and linear sysems: The analogy beween firs order sysems of linear differenial equaions (Chaper 5) and scalar linear differenial equaions (Chaper ) is much sronger
Single and Double Pendulum Models
 Single and Double Pendulum Models Mah 596 Projec Summary Spring 2016 Jarod Har 1 Overview Differen ypes of pendulums are used o model many phenomena in various disciplines. In paricular, single and double
Single and Double Pendulum Models Mah 596 Projec Summary Spring 2016 Jarod Har 1 Overview Differen ypes of pendulums are used o model many phenomena in various disciplines. In paricular, single and double
1. Kinematics I: Position and Velocity
 1. Kinemaics I: Posiion and Velociy Inroducion The purpose of his eperimen is o undersand and describe moion. We describe he moion of an objec by specifying is posiion, velociy, and acceleraion. In his
1. Kinemaics I: Posiion and Velociy Inroducion The purpose of his eperimen is o undersand and describe moion. We describe he moion of an objec by specifying is posiion, velociy, and acceleraion. In his
copper ring magnetic field
 IB PHYSICS: Magneic Fields, lecromagneic Inducion, Alernaing Curren 1. This quesion is abou elecromagneic inducion. In 1831 Michael Faraday demonsraed hree ways of inducing an elecric curren in a ring
IB PHYSICS: Magneic Fields, lecromagneic Inducion, Alernaing Curren 1. This quesion is abou elecromagneic inducion. In 1831 Michael Faraday demonsraed hree ways of inducing an elecric curren in a ring
Integration Over Manifolds with Variable Coordinate Density
 Inegraion Over Manifolds wih Variable Coordinae Densiy Absrac Chrisopher A. Lafore clafore@gmail.com In his paper, he inegraion of a funcion over a curved manifold is examined in he case where he curvaure
Inegraion Over Manifolds wih Variable Coordinae Densiy Absrac Chrisopher A. Lafore clafore@gmail.com In his paper, he inegraion of a funcion over a curved manifold is examined in he case where he curvaure
Math 115 Final Exam December 14, 2017
 On my honor, as a suden, I have neiher given nor received unauhorized aid on his academic work. Your Iniials Only: Iniials: Do no wrie in his area Mah 5 Final Exam December, 07 Your U-M ID # (no uniqname):
On my honor, as a suden, I have neiher given nor received unauhorized aid on his academic work. Your Iniials Only: Iniials: Do no wrie in his area Mah 5 Final Exam December, 07 Your U-M ID # (no uniqname):
Matlab and Python programming: how to get started
 Malab and Pyhon programming: how o ge sared Equipping readers he skills o wrie programs o explore complex sysems and discover ineresing paerns from big daa is one of he main goals of his book. In his chaper,
Malab and Pyhon programming: how o ge sared Equipping readers he skills o wrie programs o explore complex sysems and discover ineresing paerns from big daa is one of he main goals of his book. In his chaper,
Physics 180A Fall 2008 Test points. Provide the best answer to the following questions and problems. Watch your sig figs.
 Physics 180A Fall 2008 Tes 1-120 poins Name Provide he bes answer o he following quesions and problems. Wach your sig figs. 1) The number of meaningful digis in a number is called he number of. When numbers
Physics 180A Fall 2008 Tes 1-120 poins Name Provide he bes answer o he following quesions and problems. Wach your sig figs. 1) The number of meaningful digis in a number is called he number of. When numbers
THE 2-BODY PROBLEM. FIGURE 1. A pair of ellipses sharing a common focus. (c,b) c+a ROBERT J. VANDERBEI
 c+a ROBERT J. VANDERBEI") THE 2-BODY PROBLEM ROBERT J. VANDERBEI ABSTRACT. In his shor noe, we show ha a pair of ellipses wih a common focus is a soluion o he 2-body problem. INTRODUCTION. Solving he 2-body problem from scrach
THE 2-BODY PROBLEM ROBERT J. VANDERBEI ABSTRACT. In his shor noe, we show ha a pair of ellipses wih a common focus is a soluion o he 2-body problem. INTRODUCTION. Solving he 2-body problem from scrach
Kinematics and kinematic functions
 Kinemaics and kinemaic funcions Kinemaics deals wih he sudy of four funcions (called kinemaic funcions or KFs) ha mahemaically ransform join variables ino caresian variables and vice versa Direc Posiion
Kinemaics and kinemaic funcions Kinemaics deals wih he sudy of four funcions (called kinemaic funcions or KFs) ha mahemaically ransform join variables ino caresian variables and vice versa Direc Posiion
Lab #2: Kinematics in 1-Dimension
 Reading Assignmen: Chaper 2, Secions 2-1 hrough 2-8 Lab #2: Kinemaics in 1-Dimension Inroducion: The sudy of moion is broken ino wo main areas of sudy kinemaics and dynamics. Kinemaics is he descripion
Reading Assignmen: Chaper 2, Secions 2-1 hrough 2-8 Lab #2: Kinemaics in 1-Dimension Inroducion: The sudy of moion is broken ino wo main areas of sudy kinemaics and dynamics. Kinemaics is he descripion
Week 1 Lecture 2 Problems 2, 5. What if something oscillates with no obvious spring? What is ω? (problem set problem)
") Week 1 Lecure Problems, 5 Wha if somehing oscillaes wih no obvious spring? Wha is ω? (problem se problem) Sar wih Try and ge o SHM form E. Full beer can in lake, oscillaing F = m & = ge rearrange: F =
Week 1 Lecure Problems, 5 Wha if somehing oscillaes wih no obvious spring? Wha is ω? (problem se problem) Sar wih Try and ge o SHM form E. Full beer can in lake, oscillaing F = m & = ge rearrange: F =
5.2. The Natural Logarithm. Solution
 5.2 The Naural Logarihm The number e is an irraional number, similar in naure o π. Is non-erminaing, non-repeaing value is e 2.718 281 828 59. Like π, e also occurs frequenly in naural phenomena. In fac,
5.2 The Naural Logarihm The number e is an irraional number, similar in naure o π. Is non-erminaing, non-repeaing value is e 2.718 281 828 59. Like π, e also occurs frequenly in naural phenomena. In fac,
In this chapter the model of free motion under gravity is extended to objects projected at an angle. When you have completed it, you should
 Cambridge Universiy Press 978--36-60033-7 Cambridge Inernaional AS and A Level Mahemaics: Mechanics Coursebook Excerp More Informaion Chaper The moion of projeciles In his chaper he model of free moion
Cambridge Universiy Press 978--36-60033-7 Cambridge Inernaional AS and A Level Mahemaics: Mechanics Coursebook Excerp More Informaion Chaper The moion of projeciles In his chaper he model of free moion
Chapter Q1. We need to understand Classical wave first. 3/28/2004 H133 Spring
 Chaper Q1 Inroducion o Quanum Mechanics End of 19 h Cenury only a few loose ends o wrap up. Led o Relaiviy which you learned abou las quarer Led o Quanum Mechanics (1920 s-30 s and beyond) Behavior of
Chaper Q1 Inroducion o Quanum Mechanics End of 19 h Cenury only a few loose ends o wrap up. Led o Relaiviy which you learned abou las quarer Led o Quanum Mechanics (1920 s-30 s and beyond) Behavior of
IB Physics Kinematics Worksheet
 IB Physics Kinemaics Workshee Wrie full soluions and noes for muliple choice answers. Do no use a calculaor for muliple choice answers. 1. Which of he following is a correc definiion of average acceleraion?
IB Physics Kinemaics Workshee Wrie full soluions and noes for muliple choice answers. Do no use a calculaor for muliple choice answers. 1. Which of he following is a correc definiion of average acceleraion?
BEng (Hons) Telecommunications. Examinations for / Semester 2
 Telecommunications. Examinations for / Semester 2") BEng (Hons) Telecommunicaions Cohor: BTEL/14/FT Examinaions for 2015-2016 / Semeser 2 MODULE: ELECTROMAGNETIC THEORY MODULE CODE: ASE2103 Duraion: 2 ½ Hours Insrucions o Candidaes: 1. Answer ALL 4 (FOUR)
BEng (Hons) Telecommunicaions Cohor: BTEL/14/FT Examinaions for 2015-2016 / Semeser 2 MODULE: ELECTROMAGNETIC THEORY MODULE CODE: ASE2103 Duraion: 2 ½ Hours Insrucions o Candidaes: 1. Answer ALL 4 (FOUR)
SOLUTIONS TO ECE 3084
 SOLUTIONS TO ECE 384 PROBLEM 2.. For each sysem below, specify wheher or no i is: (i) memoryless; (ii) causal; (iii) inverible; (iv) linear; (v) ime invarian; Explain your reasoning. If he propery is no
SOLUTIONS TO ECE 384 PROBLEM 2.. For each sysem below, specify wheher or no i is: (i) memoryless; (ii) causal; (iii) inverible; (iv) linear; (v) ime invarian; Explain your reasoning. If he propery is no
Math Wednesday March 3, , 4.3: First order systems of Differential Equations Why you should expect existence and uniqueness for the IVP
 Mah 2280 Wednesda March 3, 200 4., 4.3: Firs order ssems of Differenial Equaions Wh ou should epec eisence and uniqueness for he IVP Eample: Consider he iniial value problem relaed o page 4 of his eserda
Mah 2280 Wednesda March 3, 200 4., 4.3: Firs order ssems of Differenial Equaions Wh ou should epec eisence and uniqueness for he IVP Eample: Consider he iniial value problem relaed o page 4 of his eserda
Effects of Coordinate Curvature on Integration
 Effecs of Coordinae Curvaure on Inegraion Chrisopher A. Lafore clafore@gmail.com Absrac In his paper, he inegraion of a funcion over a curved manifold is examined in he case where he curvaure of he manifold
Effecs of Coordinae Curvaure on Inegraion Chrisopher A. Lafore clafore@gmail.com Absrac In his paper, he inegraion of a funcion over a curved manifold is examined in he case where he curvaure of he manifold
Multiple Choice Solutions 1. E (2003 AB25) () xt t t t 2. A (2008 AB21/BC21) 3. B (2008 AB7) Using Fundamental Theorem of Calculus: 1
 () xt t t t 2. A (2008 AB21/BC21) 3. B (2008 AB7) Using Fundamental Theorem of Calculus: 1") Paricle Moion Soluions We have inenionally included more maerial han can be covered in mos Suden Sudy Sessions o accoun for groups ha are able o answer he quesions a a faser rae. Use your own judgmen,
Paricle Moion Soluions We have inenionally included more maerial han can be covered in mos Suden Sudy Sessions o accoun for groups ha are able o answer he quesions a a faser rae. Use your own judgmen,
Chapter 3 Kinematics in Two Dimensions
 Chaper 3 KINEMATICS IN TWO DIMENSIONS PREVIEW Two-dimensional moion includes objecs which are moing in wo direcions a he same ime, such as a projecile, which has boh horizonal and erical moion. These wo
Chaper 3 KINEMATICS IN TWO DIMENSIONS PREVIEW Two-dimensional moion includes objecs which are moing in wo direcions a he same ime, such as a projecile, which has boh horizonal and erical moion. These wo
2.1: What is physics? Ch02: Motion along a straight line. 2.2: Motion. 2.3: Position, Displacement, Distance
 Ch: Moion along a sraigh line Moion Posiion and Displacemen Average Velociy and Average Speed Insananeous Velociy and Speed Acceleraion Consan Acceleraion: A Special Case Anoher Look a Consan Acceleraion
Ch: Moion along a sraigh line Moion Posiion and Displacemen Average Velociy and Average Speed Insananeous Velociy and Speed Acceleraion Consan Acceleraion: A Special Case Anoher Look a Consan Acceleraion
Equations of motion for constant acceleration
 Lecure 3 Chaper 2 Physics I 01.29.2014 Equaions of moion for consan acceleraion Course websie: hp://faculy.uml.edu/andriy_danylo/teaching/physicsi Lecure Capure: hp://echo360.uml.edu/danylo2013/physics1spring.hml
Lecure 3 Chaper 2 Physics I 01.29.2014 Equaions of moion for consan acceleraion Course websie: hp://faculy.uml.edu/andriy_danylo/teaching/physicsi Lecure Capure: hp://echo360.uml.edu/danylo2013/physics1spring.hml
Fishing limits and the Logistic Equation. 1
 Fishing limis and he Logisic Equaion. 1 1. The Logisic Equaion. The logisic equaion is an equaion governing populaion growh for populaions in an environmen wih a limied amoun of resources (for insance,
Fishing limis and he Logisic Equaion. 1 1. The Logisic Equaion. The logisic equaion is an equaion governing populaion growh for populaions in an environmen wih a limied amoun of resources (for insance,
dt = C exp (3 ln t 4 ). t 4 W = C exp ( ln(4 t) 3) = C(4 t) 3.
. t 4 W = C exp ( ln(4 t) 3) = C(4 t) 3.") Mah Rahman Exam Review Soluions () Consider he IVP: ( 4)y 3y + 4y = ; y(3) = 0, y (3) =. (a) Please deermine he longes inerval for which he IVP is guaraneed o have a unique soluion. Soluion: The disconinuiies
Mah Rahman Exam Review Soluions () Consider he IVP: ( 4)y 3y + 4y = ; y(3) = 0, y (3) =. (a) Please deermine he longes inerval for which he IVP is guaraneed o have a unique soluion. Soluion: The disconinuiies
Biol. 356 Lab 8. Mortality, Recruitment, and Migration Rates
 Biol. 356 Lab 8. Moraliy, Recruimen, and Migraion Raes (modified from Cox, 00, General Ecology Lab Manual, McGraw Hill) Las week we esimaed populaion size hrough several mehods. One assumpion of all hese
Biol. 356 Lab 8. Moraliy, Recruimen, and Migraion Raes (modified from Cox, 00, General Ecology Lab Manual, McGraw Hill) Las week we esimaed populaion size hrough several mehods. One assumpion of all hese
( ) a system of differential equations with continuous parametrization ( T = R + These look like, respectively:
 a system of differential equations with continuous parametrization ( T = R + These look like, respectively:") XIII. DIFFERENCE AND DIFFERENTIAL EQUATIONS Ofen funcions, or a sysem of funcion, are paramerized in erms of some variable, usually denoed as and inerpreed as ime. The variable is wrien as a funcion of
XIII. DIFFERENCE AND DIFFERENTIAL EQUATIONS Ofen funcions, or a sysem of funcion, are paramerized in erms of some variable, usually denoed as and inerpreed as ime. The variable is wrien as a funcion of
FITTING EQUATIONS TO DATA
 TANTON S TAKE ON FITTING EQUATIONS TO DATA CURRICULUM TIDBITS FOR THE MATHEMATICS CLASSROOM MAY 013 Sandard algebra courses have sudens fi linear and eponenial funcions o wo daa poins, and quadraic funcions
TANTON S TAKE ON FITTING EQUATIONS TO DATA CURRICULUM TIDBITS FOR THE MATHEMATICS CLASSROOM MAY 013 Sandard algebra courses have sudens fi linear and eponenial funcions o wo daa poins, and quadraic funcions
Math 221: Mathematical Notation
 Mah 221: Mahemaical Noaion Purpose: One goal in any course is o properly use he language o ha subjec. These noaions summarize some o he major conceps and more diicul opics o he uni. Typing hem helps you
Mah 221: Mahemaical Noaion Purpose: One goal in any course is o properly use he language o ha subjec. These noaions summarize some o he major conceps and more diicul opics o he uni. Typing hem helps you
Physics 235 Chapter 2. Chapter 2 Newtonian Mechanics Single Particle
 Chaper 2 Newonian Mechanics Single Paricle In his Chaper we will review wha Newon s laws of mechanics ell us abou he moion of a single paricle. Newon s laws are only valid in suiable reference frames,
Chaper 2 Newonian Mechanics Single Paricle In his Chaper we will review wha Newon s laws of mechanics ell us abou he moion of a single paricle. Newon s laws are only valid in suiable reference frames,
PHYS 100: Lecture 2. Motion at Constant Acceleration. Relative Motion: Reference Frames. x x = v t + a t. x = vdt. v = adt. x Tortoise.
 a PHYS 100: Lecure 2 Moion a Consan Acceleraion a 0 0 Area a 0 a 0 v ad v v0 a0 v 0 x vd 0 A(1/2)( v) Area v 0 v v-v 0 v 0 x x v + a 1 0 0 2 0 2 Relaive Moion: Reference Frames x d Achilles Toroise x Toroise
a PHYS 100: Lecure 2 Moion a Consan Acceleraion a 0 0 Area a 0 a 0 v ad v v0 a0 v 0 x vd 0 A(1/2)( v) Area v 0 v v-v 0 v 0 x x v + a 1 0 0 2 0 2 Relaive Moion: Reference Frames x d Achilles Toroise x Toroise
dy dx = xey (a) y(0) = 2 (b) y(1) = 2.5 SOLUTION: See next page
 y(0) = 2 (b) y(1) = 2.5 SOLUTION: See next page") Assignmen 1 MATH 2270 SOLUTION Please wrie ou complee soluions for each of he following 6 problems (one more will sill be added). You may, of course, consul wih your classmaes, he exbook or oher resources,
Assignmen 1 MATH 2270 SOLUTION Please wrie ou complee soluions for each of he following 6 problems (one more will sill be added). You may, of course, consul wih your classmaes, he exbook or oher resources,
PHYSICS 220 Lecture 02 Motion, Forces, and Newton s Laws Textbook Sections
 PHYSICS 220 Lecure 02 Moion, Forces, and Newon s Laws Texbook Secions 2.2-2.4 Lecure 2 Purdue Universiy, Physics 220 1 Overview Las Lecure Unis Scienific Noaion Significan Figures Moion Displacemen: Δx
PHYSICS 220 Lecure 02 Moion, Forces, and Newon s Laws Texbook Secions 2.2-2.4 Lecure 2 Purdue Universiy, Physics 220 1 Overview Las Lecure Unis Scienific Noaion Significan Figures Moion Displacemen: Δx
Review - Quiz # 1. 1 g(y) dy = f(x) dx. y x. = u, so that y = xu and dy. dx (Sometimes you may want to use the substitution x y
 dy = f(x) dx. y x. = u, so that y = xu and dy. dx (Sometimes you may want to use the substitution x y") Review - Quiz # 1 (1) Solving Special Tpes of Firs Order Equaions I. Separable Equaions (SE). d = f() g() Mehod of Soluion : 1 g() d = f() (The soluions ma be given implicil b he above formula. Remember,
Review - Quiz # 1 (1) Solving Special Tpes of Firs Order Equaions I. Separable Equaions (SE). d = f() g() Mehod of Soluion : 1 g() d = f() (The soluions ma be given implicil b he above formula. Remember,
Section 7.4 Modeling Changing Amplitude and Midline
 488 Chaper 7 Secion 7.4 Modeling Changing Ampliude and Midline While sinusoidal funcions can model a variey of behaviors, i is ofen necessary o combine sinusoidal funcions wih linear and exponenial curves
488 Chaper 7 Secion 7.4 Modeling Changing Ampliude and Midline While sinusoidal funcions can model a variey of behaviors, i is ofen necessary o combine sinusoidal funcions wih linear and exponenial curves
Mark Scheme (Results) January 2011
 January 2011") Mark (Resuls) January 0 GCE GCE Furher Pure Mahemaics FP (6667) Paper Edexcel Limied. Regisered in England and Wales No. 4496750 Regisered Office: One90 High Holborn, London WCV 7BH Edexcel is one of he
Mark (Resuls) January 0 GCE GCE Furher Pure Mahemaics FP (6667) Paper Edexcel Limied. Regisered in England and Wales No. 4496750 Regisered Office: One90 High Holborn, London WCV 7BH Edexcel is one of he
AP CALCULUS AB 2003 SCORING GUIDELINES (Form B)
") SCORING GUIDELINES (Form B) Quesion A blood vessel is 6 millimeers (mm) long Disance wih circular cross secions of varying diameer. x (mm) 6 8 4 6 Diameer The able above gives he measuremens of he B(x)
SCORING GUIDELINES (Form B) Quesion A blood vessel is 6 millimeers (mm) long Disance wih circular cross secions of varying diameer. x (mm) 6 8 4 6 Diameer The able above gives he measuremens of he B(x)
= ( ) ) or a system of differential equations with continuous parametrization (T = R
 ) or a system of differential equations with continuous parametrization (T = R") XIII. DIFFERENCE AND DIFFERENTIAL EQUATIONS Ofen funcions, or a sysem of funcion, are paramerized in erms of some variable, usually denoed as and inerpreed as ime. The variable is wrien as a funcion of
XIII. DIFFERENCE AND DIFFERENTIAL EQUATIONS Ofen funcions, or a sysem of funcion, are paramerized in erms of some variable, usually denoed as and inerpreed as ime. The variable is wrien as a funcion of
HW6: MRI Imaging Pulse Sequences (7 Problems for 100 pts)
") HW6: MRI Imaging Pulse Sequences (7 Problems for 100 ps) GOAL The overall goal of HW6 is o beer undersand pulse sequences for MRI image reconsrucion. OBJECTIVES 1) Design a spin echo pulse sequence o image
HW6: MRI Imaging Pulse Sequences (7 Problems for 100 ps) GOAL The overall goal of HW6 is o beer undersand pulse sequences for MRI image reconsrucion. OBJECTIVES 1) Design a spin echo pulse sequence o image
Non-uniform circular motion *
 OpenSax-CNX module: m14020 1 Non-uniform circular moion * Sunil Kumar Singh This work is produced by OpenSax-CNX and licensed under he Creaive Commons Aribuion License 2.0 Wha do we mean by non-uniform
OpenSax-CNX module: m14020 1 Non-uniform circular moion * Sunil Kumar Singh This work is produced by OpenSax-CNX and licensed under he Creaive Commons Aribuion License 2.0 Wha do we mean by non-uniform
23.5. Half-Range Series. Introduction. Prerequisites. Learning Outcomes
 Half-Range Series 2.5 Inroducion In his Secion we address he following problem: Can we find a Fourier series expansion of a funcion defined over a finie inerval? Of course we recognise ha such a funcion
Half-Range Series 2.5 Inroducion In his Secion we address he following problem: Can we find a Fourier series expansion of a funcion defined over a finie inerval? Of course we recognise ha such a funcion
The Fundamental Theorem of Calculus Solutions
 The Fundamenal Theorem of Calculus Soluions We have inenionally included more maerial han can be covered in mos Suden Sudy Sessions o accoun for groups ha are able o answer he quesions a a faser rae. Use
The Fundamenal Theorem of Calculus Soluions We have inenionally included more maerial han can be covered in mos Suden Sudy Sessions o accoun for groups ha are able o answer he quesions a a faser rae. Use
Predator - Prey Model Trajectories and the nonlinear conservation law
 Predaor - Prey Model Trajecories and he nonlinear conservaion law James K. Peerson Deparmen of Biological Sciences and Deparmen of Mahemaical Sciences Clemson Universiy Ocober 28, 213 Ouline Drawing Trajecories
Predaor - Prey Model Trajecories and he nonlinear conservaion law James K. Peerson Deparmen of Biological Sciences and Deparmen of Mahemaical Sciences Clemson Universiy Ocober 28, 213 Ouline Drawing Trajecories