Summary of part I: prediction and RL
|
|
|
- Anissa Wilkins
- 5 years ago
- Views:
Transcription
1 Summary of part I: prediction and RL Prediction is important for action selection The problem: prediction of future reward The algorithm: temporal difference learning Neural implementation: dopamine dependent learning in BG A precise computational model of learning allows one to look in the brain for hidden variables postulated by the model Precise (normative!) theory for generation of dopamine firing patterns Explains anticipatory dopaminergic responding, second order conditioning Compelling account for the role of dopamine in classical conditioning: prediction error acts as signal driving learning in prediction areas
2 prediction error hypothesis of dopamine measured firing rate at end of trial: δ t = r t - V t (just like R-W) V t = η t i=1 (1 η) t i r i model prediction error Bayer & Glimcher (2005)
3 Global plan Reinforcement learning I: prediction classical conditioning dopamine Reinforcement learning II: dynamic programming; action selection Pavlovian misbehaviour vigor Chapter 9 of Theoretical Neuroscience

4 Action Selection Evolutionary specification Immediate reinforcement: leg flexion Thorndike puzzle box pigeon; rat; human matching Delayed reinforcement: these tasks mazes chess Bandler; Blanchard
5 Immediate Reinforcement stochastic policy: based on action values: L m R m ; 5
6 use RW rule: Indirect Actor r L p L = R R 0.05; r = p 0.25 switch every 100 trials 6
7 Direct Actor L E ( m) = P[ L] r + P[ R] r R P[ L] L m = βp[ L] P[ R] P[ R] R m = βp[ L] P[ R] E ( m ) = β P [ L ] r P [ L ] r + P [ R ] r L m E( m) [ ]( L = β P L r E( m) ) L m E( m) β L m ( ( )) L L R ( L r E m ) ( ) if L is chosen L R L R a m m (1 ε )( m m ) + ε ( r E( m))( L R)
8 8 Direct Actor
9 Could we Tell? correlate past rewards, actions with present choice indirect actor (separate clocks): direct actor (single clock):
10 Matching: Concurrent VI-VI Lau, Glimcher, Corrado, Sugrue, Newsome
11 Matching income not return approximately exponential in r alternation choice kernel
12 Action at a (Temporal) Distance x=1 x=1 x=2 x=3 x=2 x=3 learning an appropriate action at x=1: depends on the actions at x=2 and x=3 gains no immediate feedback idea: use prediction as surrogate feedback 12
13 Action Selection L R start with policy: P[ L; x] = σ ( m ( x) m ( x)) x=1 x=2 x=3 x=1 x=2 x=3 evaluate it: V ( 1), V (2), V (3) improve it: x=1 x=2 x= thus choose R more frequently than L;C m * α δ
14 Policy δ > 0 if value is too pessimistic action is better than average v P x=1 x=2 x=3 14
15 actor/critic m 1 m 2 m 3 m n dopamine signals to both motivational & motor striatum appear, surprisingly the same suggestion: training both values & policies
16 Formally: Dynamic Programming
![Variants: SARSA [ V x x u C] * t + (](/docs-images/86/94724890/images/17-0.jpg "t ) t = 1 t = ( actual (1, C) + ε r")
 Q C t Morris et al,")
17 Variants: SARSA [ V x x u C] * t + ( t ) t = 1 t = ( actual (1, C) + ε r + Q(2, u ) Q(1, )) * Q ( 1, C) = E r + 1, Q( 1, C) Q C t Morris et al, 2006
![Q * Variants: Q learning [ + V ( x ) x = 1 u C] * ( 1, C) = E r t+ 1 t, t](/docs-images/86/94724890/images/18-0.jpg "t = ( r + max Q(2, u) Q(1, )) Q( 1, C) Q(1, C) + ε C t u Roesch et al,")
18 Q * Variants: Q learning [ + V ( x ) x = 1 u C] * ( 1, C) = E r t+ 1 t, t t = ( r + max Q(2, u) Q(1, )) Q( 1, C) Q(1, C) + ε C t u Roesch et al, 2007
19 Summary prediction learning Bellman evaluation actor-critic asynchronous policy iteration indirect method (Q learning) asynchronous value iteration Q * V * [ ( ) 1] * t + V xt x = [ + V ( x ) x = 1 u C] * ( 1) E r 1 = + t ( 1, C) = E r t+ 1 t, t t =
20 Impulsivity & Hyperbolic Discounting humans (and animals) show impulsivity in: diets addiction spending, intertemporal conflict between short and long term choices often explained via hyperbolic discount functions alternative is Pavlovian imperative to an immediate reinforcer framing, trolley dilemmas, etc
 delay actions given strongly attractive")
21 Direct/Indirect Pathways Frank direct: D1: GO; learn from DA increase indirect: D2: nogo; learn from DA decrease hyperdirect (STN) delay actions given strongly attractive choices
22 Frank DARPP-32: D1 effect DRD2: D2 effect


23 Three Decision Makers tree search position evaluation situation memory
24 Multiple Systems in RL model-based RL build a forward model of the task, outcomes search in the forward model (online DP) optimal use of information computationally ruinous cached-based RL learn Q values, which summarize future worth computationally trivial bootstrap-based; so statistically inefficient learn both select according to uncertainty
25 Animal Canary OFC; dlpfc; dorsomedial striatum; BLA? dosolateral striatum, amygdala
26 Two Systems:
27 Behavioural Effects
28 Effects of Learning distributional value iteration (Bayesian Q learning) fixed additional uncertainty per step


29 One Outcome shallow tree implies goal-directed control wins
30 Human Canary... a b c if a c and c, then do more of a or b? MB: b MF: a (or even no effect)
 = Q (")

31 Behaviour action values depend on both systems: Q tot ( x, u) = Q ( x, u) + βq ( x, u) MF MB expect that β will vary by subject (but be fixed)


32 Neural Prediction Errors (1 2) R ventral striatum (anatomical definition) note that MB RL does not use this prediction error training signal?
 right")

33 Neural Prediction Errors (1) right nucleus accumbens behaviour 1-2, not 1
34 Vigour Two components to choice: what: lever pressing direction to run meal to choose when/how fast/how vigorous free operant tasks real-valued DP 34
35 The model cost? how fast τ vigour cost C τ V LP unit cost (reward) C U P R U R NP S 0 Other τ 1 time S 1 S τ 2 time 2 choose (action,τ) = (LP,τ 1 ) Costs Rewards choose (action,τ) = (LP,τ 2 ) Costs Rewards goal 35
 = (LP,τ 1 ) Costs Rewards choose (action,τ) = (LP,τ 2 ) Costs Rewards ARL")
36 The model Goal: Choose actions and latencies to maximize the average rate of return (rewards minus costs per time) S 0 τ 1 time S 1 S τ 2 time 2 choose (action,τ) = (LP,τ 1 ) Costs Rewards choose (action,τ) = (LP,τ 2 ) Costs Rewards ARL 36
37 Average Reward RL Compute differential values of actions Differential value of taking action L with latency τ when in state x ρ = average rewards minus costs, per unit time Q L,τ (x) = Rewards Costs + C u C + v τ Future Returns V (x') τρ steady state behavior (not learning dynamics) 37 (Extension of Schwartz 1993)
38 Average Reward Cost/benefit Tradeoffs 1. Which action to take? Choose action with largest expected reward minus cost 2.How fast to perform it? slow less costly (vigour cost) slow delays (all) rewards net rate of rewards = cost of delay (opportunity cost of time) Choose rate that balances vigour and opportunity costs explains faster (irrelevant) actions under hunger, etc masochism 38
39 Optimal response rates probability 1 st Nose poke 0.4 rate per minute 30 Niv, Dayan, Joel, unpublished st NP LP seconds seconds since reinforcement Experimental data probability 1 st Nose poke seconds rate per minute seconds since reinforcement Model simulation 39
40 Optimal response rates Experimental data Model simulation % Responses on key A Pigeon A Pigeon B Perfect matching Herrnstein % Reinforcements on key A on lever A % Responses 50 0 Model Perfect matching More: 0 50 # responses % Reinforcements on lever A interval length amount of reward ratio vs. interval breaking point temporal structure etc. 40
41 Effects of motivation (in the model) RR25 Cv Q( x, u, τ ) = prr Cu + V ( x' ) τ R τ Q( x, u, τ ) Cv = R = 0 τ 2 opt = τ τ C R v opt mean latency low utility high utility energizing effect LP Other 41
42 Effects of motivation (in the model) RR25 directing effect response rate / minute response rate / minute seconds from reinforcement 1 U R 50% seconds from reinforcement low utility high utility mean latency 2 energizing effect LP Other 42

43 Relation to Dopamine Phasic dopamine firing = reward prediction error What about tonic dopamine? less more 43
44 Tonic dopamine = Average reward rate 1. explains pharmacological manipulations 2. dopamine control of vigour through BG pathways # LPs in 30 minutes Control DA depleted Aberman and Salamone 1999 # LPs in 30 minutes Control DA depleted eating time confound context/state dependence (motivation & drugs?) less switching=perseveration 44 NB. phasic signal RPE for choice/value learning Model simulation
45 Tonic dopamine hypothesis $ $ $ $ $ $ also explains effects of phasic dopamine on response times firing rate 45 reaction time Satoh and Kimura 2003 Ljungberg, Apicella and Schultz 1992
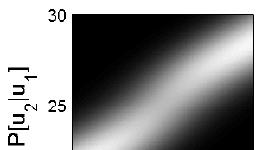
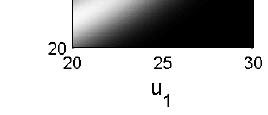
46 Sensory Decisions as Optimal Stopping consider listening to: decision: choose, or sample
47 Optimal Stopping equivalent of state u=1 is u 1 = n1 σ = C r 2.5 = 0.1 and states u=2,3 is u = ( n + n )
48 Transition Probabilities
49 Computational Neuromodulation dopamine phasic: prediction error for reward tonic: average reward (vigour) serotonin phasic: prediction error for punishment? acetylcholine: expected uncertainty? norepinephrine unexpected uncertainty; neural interrupt?
50 Conditioning 50 prediction: of important events control: in the light of those predictions Ethology optimality appropriateness Psychology classical/operant conditioning Computation dynamic progr. Kalman filtering Algorithm TD/delta rules simple weights Neurobiology neuromodulators; amygdala; OFC nucleus accumbens; dorsal striatum


51 Markov Decision Process class of stylized tasks with states, actions & rewards at each timestep t the world takes on state s t and delivers reward r t, and the agent chooses an action a t
52 Markov Decision Process World: You are in state 34. Your immediate reward is 3. You have 3 actions. Robot: I ll take action 2. World: You are in state 77. Your immediate reward is -7. You have 2 actions. Robot: I ll take action 1. World: You re in state 34 (again). Your immediate reward is 3. You have 3 actions.
53 Markov Decision Process Stochastic process defined by: reward function: r t ~ P(r t s t ) transition function: s t ~ P(s t+1 s t, a t )
54 Markov Decision Process Stochastic process defined by: reward function: r t ~ P(r t s t ) transition function: s t ~ P(s t+1 s t, a t ) Markov property future conditionally independent of past, given s t
55 The optimal policy Definition: a policy such that at every state, its expected value is better than (or equal to) that of all other policies Theorem: For every MDP there exists (at least) one deterministic optimal policy. by the way, why is the optimal policy just a mapping from states to actions? couldn t you earn more reward by choosing a different action depending on last 2 states?
56 Pavlovian & Instrumental Conditioning Pavlovian learning values and predictions using TD error Instrumental learning actions: by reinforcement (leg flexion) by (TD) critic (actually different forms: goal directed & habitual)
57 Pavlovian-Instrumental Interactions synergistic conditioned reinforcement Pavlovian-instrumental transfer Pavlovian cue predicts the instrumental outcome behavioural inhibition to avoid aversive outcomes neutral Pavlovian-instrumental transfer Pavlovian cue predicts outcome with same motivational valence opponent Pavlovian-instrumental transfer Pavlovian cue predicts opposite motivational valence negative automaintenance
58 -ve Automaintenance in Autoshaping simple choice task N: nogo gives reward r=1 G: go gives reward r=0 learn three quantities average value Q value for N Q value for G instrumental propensity is
59 -ve Automaintenance in Autoshaping Pavlovian action assert: Pavlovian impetus towards G is v(t) weight Pavlovian and instrumental advantages by ω competitive reliability of Pavlov new propensities new action choice
 lines are theoretical asymptotes equilibrium probabilities of")
60 -ve Automaintenance in Autoshaping basic ve automaintenance effect (µ=5) lines are theoretical asymptotes equilibrium probabilities of action
Reinforcement learning
 einforcement learning How to learn to make decisions in sequential problems (like: chess, a maze) Why is this difficult? Temporal credit assignment Prediction can help Further reading For modeling: Chapter
einforcement learning How to learn to make decisions in sequential problems (like: chess, a maze) Why is this difficult? Temporal credit assignment Prediction can help Further reading For modeling: Chapter
MARKOV DECISION PROCESSES (MDP) AND REINFORCEMENT LEARNING (RL) Versione originale delle slide fornita dal Prof. Francesco Lo Presti
 AND REINFORCEMENT LEARNING (RL) Versione originale delle slide fornita dal Prof. Francesco Lo Presti") 1 MARKOV DECISION PROCESSES (MDP) AND REINFORCEMENT LEARNING (RL) Versione originale delle slide fornita dal Prof. Francesco Lo Presti Historical background 2 Original motivation: animal learning Early
1 MARKOV DECISION PROCESSES (MDP) AND REINFORCEMENT LEARNING (RL) Versione originale delle slide fornita dal Prof. Francesco Lo Presti Historical background 2 Original motivation: animal learning Early
CS599 Lecture 1 Introduction To RL
 CS599 Lecture 1 Introduction To RL Reinforcement Learning Introduction Learning from rewards Policies Value Functions Rewards Models of the Environment Exploitation vs. Exploration Dynamic Programming
CS599 Lecture 1 Introduction To RL Reinforcement Learning Introduction Learning from rewards Policies Value Functions Rewards Models of the Environment Exploitation vs. Exploration Dynamic Programming
Animal learning theory
 Animal learning theory Based on [Sutton and Barto, 1990, Dayan and Abbott, 2001] Bert Kappen [Sutton and Barto, 1990] Classical conditioning: - A conditioned stimulus (CS) and unconditioned stimulus (US)
Animal learning theory Based on [Sutton and Barto, 1990, Dayan and Abbott, 2001] Bert Kappen [Sutton and Barto, 1990] Classical conditioning: - A conditioned stimulus (CS) and unconditioned stimulus (US)
Rewards and Value Systems: Conditioning and Reinforcement Learning
 Rewards and Value Systems: Conditioning and Reinforcement Learning Acknowledgements: Many thanks to P. Dayan and L. Abbott for making the figures of their book available online. Also thanks to R. Sutton
Rewards and Value Systems: Conditioning and Reinforcement Learning Acknowledgements: Many thanks to P. Dayan and L. Abbott for making the figures of their book available online. Also thanks to R. Sutton
Basics of reinforcement learning
 Basics of reinforcement learning Lucian Buşoniu TMLSS, 20 July 2018 Main idea of reinforcement learning (RL) Learn a sequential decision policy to optimize the cumulative performance of an unknown system
Basics of reinforcement learning Lucian Buşoniu TMLSS, 20 July 2018 Main idea of reinforcement learning (RL) Learn a sequential decision policy to optimize the cumulative performance of an unknown system
Markov decision processes
 CS 2740 Knowledge representation Lecture 24 Markov decision processes Milos Hauskrecht milos@cs.pitt.edu 5329 Sennott Square Administrative announcements Final exam: Monday, December 8, 2008 In-class Only
CS 2740 Knowledge representation Lecture 24 Markov decision processes Milos Hauskrecht milos@cs.pitt.edu 5329 Sennott Square Administrative announcements Final exam: Monday, December 8, 2008 In-class Only
Introduction to Reinforcement Learning. CMPT 882 Mar. 18
 Introduction to Reinforcement Learning CMPT 882 Mar. 18 Outline for the week Basic ideas in RL Value functions and value iteration Policy evaluation and policy improvement Model-free RL Monte-Carlo and
Introduction to Reinforcement Learning CMPT 882 Mar. 18 Outline for the week Basic ideas in RL Value functions and value iteration Policy evaluation and policy improvement Model-free RL Monte-Carlo and
Course 16:198:520: Introduction To Artificial Intelligence Lecture 13. Decision Making. Abdeslam Boularias. Wednesday, December 7, 2016
 Course 16:198:520: Introduction To Artificial Intelligence Lecture 13 Decision Making Abdeslam Boularias Wednesday, December 7, 2016 1 / 45 Overview We consider probabilistic temporal models where the
Course 16:198:520: Introduction To Artificial Intelligence Lecture 13 Decision Making Abdeslam Boularias Wednesday, December 7, 2016 1 / 45 Overview We consider probabilistic temporal models where the
Reinforcement Learning. Introduction
 Reinforcement Learning Introduction Reinforcement Learning Agent interacts and learns from a stochastic environment Science of sequential decision making Many faces of reinforcement learning Optimal control
Reinforcement Learning Introduction Reinforcement Learning Agent interacts and learns from a stochastic environment Science of sequential decision making Many faces of reinforcement learning Optimal control
Monte Carlo is important in practice. CSE 190: Reinforcement Learning: An Introduction. Chapter 6: Temporal Difference Learning.
 Monte Carlo is important in practice CSE 190: Reinforcement Learning: An Introduction Chapter 6: emporal Difference Learning When there are just a few possibilitieo value, out of a large state space, Monte
Monte Carlo is important in practice CSE 190: Reinforcement Learning: An Introduction Chapter 6: emporal Difference Learning When there are just a few possibilitieo value, out of a large state space, Monte
Lecture 1: March 7, 2018
 Reinforcement Learning Spring Semester, 2017/8 Lecture 1: March 7, 2018 Lecturer: Yishay Mansour Scribe: ym DISCLAIMER: Based on Learning and Planning in Dynamical Systems by Shie Mannor c, all rights
Reinforcement Learning Spring Semester, 2017/8 Lecture 1: March 7, 2018 Lecturer: Yishay Mansour Scribe: ym DISCLAIMER: Based on Learning and Planning in Dynamical Systems by Shie Mannor c, all rights
Grundlagen der Künstlichen Intelligenz
 Grundlagen der Künstlichen Intelligenz Formal models of interaction Daniel Hennes 27.11.2017 (WS 2017/18) University Stuttgart - IPVS - Machine Learning & Robotics 1 Today Taxonomy of domains Models of
Grundlagen der Künstlichen Intelligenz Formal models of interaction Daniel Hennes 27.11.2017 (WS 2017/18) University Stuttgart - IPVS - Machine Learning & Robotics 1 Today Taxonomy of domains Models of
Balancing and Control of a Freely-Swinging Pendulum Using a Model-Free Reinforcement Learning Algorithm
 Balancing and Control of a Freely-Swinging Pendulum Using a Model-Free Reinforcement Learning Algorithm Michail G. Lagoudakis Department of Computer Science Duke University Durham, NC 2778 mgl@cs.duke.edu
Balancing and Control of a Freely-Swinging Pendulum Using a Model-Free Reinforcement Learning Algorithm Michail G. Lagoudakis Department of Computer Science Duke University Durham, NC 2778 mgl@cs.duke.edu
Reinforcement Learning
 Reinforcement Learning Markov decision process & Dynamic programming Evaluative feedback, value function, Bellman equation, optimality, Markov property, Markov decision process, dynamic programming, value
Reinforcement Learning Markov decision process & Dynamic programming Evaluative feedback, value function, Bellman equation, optimality, Markov property, Markov decision process, dynamic programming, value
Sequential decision making under uncertainty. Department of Computer Science, Czech Technical University in Prague
 Sequential decision making under uncertainty Jiří Kléma Department of Computer Science, Czech Technical University in Prague https://cw.fel.cvut.cz/wiki/courses/b4b36zui/prednasky pagenda Previous lecture:
Sequential decision making under uncertainty Jiří Kléma Department of Computer Science, Czech Technical University in Prague https://cw.fel.cvut.cz/wiki/courses/b4b36zui/prednasky pagenda Previous lecture:
Christopher Watkins and Peter Dayan. Noga Zaslavsky. The Hebrew University of Jerusalem Advanced Seminar in Deep Learning (67679) November 1, 2015
 November 1, 2015") Q-Learning Christopher Watkins and Peter Dayan Noga Zaslavsky The Hebrew University of Jerusalem Advanced Seminar in Deep Learning (67679) November 1, 2015 Noga Zaslavsky Q-Learning (Watkins & Dayan, 1992)
Q-Learning Christopher Watkins and Peter Dayan Noga Zaslavsky The Hebrew University of Jerusalem Advanced Seminar in Deep Learning (67679) November 1, 2015 Noga Zaslavsky Q-Learning (Watkins & Dayan, 1992)
Decision making, Markov decision processes
 Decision making, Markov decision processes Solved tasks Collected by: Jiří Kléma, klema@fel.cvut.cz Spring 2017 The main goal: The text presents solved tasks to support labs in the A4B33ZUI course. 1 Simple
Decision making, Markov decision processes Solved tasks Collected by: Jiří Kléma, klema@fel.cvut.cz Spring 2017 The main goal: The text presents solved tasks to support labs in the A4B33ZUI course. 1 Simple
6 Reinforcement Learning
 6 Reinforcement Learning As discussed above, a basic form of supervised learning is function approximation, relating input vectors to output vectors, or, more generally, finding density functions p(y,
6 Reinforcement Learning As discussed above, a basic form of supervised learning is function approximation, relating input vectors to output vectors, or, more generally, finding density functions p(y,
This question has three parts, each of which can be answered concisely, but be prepared to explain and justify your concise answer.
 This question has three parts, each of which can be answered concisely, but be prepared to explain and justify your concise answer. 1. Suppose you have a policy and its action-value function, q, then you
This question has three parts, each of which can be answered concisely, but be prepared to explain and justify your concise answer. 1. Suppose you have a policy and its action-value function, q, then you
Prof. Dr. Ann Nowé. Artificial Intelligence Lab ai.vub.ac.be
 REINFORCEMENT LEARNING AN INTRODUCTION Prof. Dr. Ann Nowé Artificial Intelligence Lab ai.vub.ac.be REINFORCEMENT LEARNING WHAT IS IT? What is it? Learning from interaction Learning about, from, and while
REINFORCEMENT LEARNING AN INTRODUCTION Prof. Dr. Ann Nowé Artificial Intelligence Lab ai.vub.ac.be REINFORCEMENT LEARNING WHAT IS IT? What is it? Learning from interaction Learning about, from, and while
REINFORCE Framework for Stochastic Policy Optimization and its use in Deep Learning
 REINFORCE Framework for Stochastic Policy Optimization and its use in Deep Learning Ronen Tamari The Hebrew University of Jerusalem Advanced Seminar in Deep Learning (#67679) February 28, 2016 Ronen Tamari
REINFORCE Framework for Stochastic Policy Optimization and its use in Deep Learning Ronen Tamari The Hebrew University of Jerusalem Advanced Seminar in Deep Learning (#67679) February 28, 2016 Ronen Tamari
Reinforcement learning an introduction
 Reinforcement learning an introduction Prof. Dr. Ann Nowé Computational Modeling Group AIlab ai.vub.ac.be November 2013 Reinforcement Learning What is it? Learning from interaction Learning about, from,
Reinforcement learning an introduction Prof. Dr. Ann Nowé Computational Modeling Group AIlab ai.vub.ac.be November 2013 Reinforcement Learning What is it? Learning from interaction Learning about, from,
Lecture 23: Reinforcement Learning
 Lecture 23: Reinforcement Learning MDPs revisited Model-based learning Monte Carlo value function estimation Temporal-difference (TD) learning Exploration November 23, 2006 1 COMP-424 Lecture 23 Recall:
Lecture 23: Reinforcement Learning MDPs revisited Model-based learning Monte Carlo value function estimation Temporal-difference (TD) learning Exploration November 23, 2006 1 COMP-424 Lecture 23 Recall:
Lecture 18: Reinforcement Learning Sanjeev Arora Elad Hazan
 COS 402 Machine Learning and Artificial Intelligence Fall 2016 Lecture 18: Reinforcement Learning Sanjeev Arora Elad Hazan Some slides borrowed from Peter Bodik and David Silver Course progress Learning
COS 402 Machine Learning and Artificial Intelligence Fall 2016 Lecture 18: Reinforcement Learning Sanjeev Arora Elad Hazan Some slides borrowed from Peter Bodik and David Silver Course progress Learning
Reinforcement Learning II
 Reinforcement Learning II Andrea Bonarini Artificial Intelligence and Robotics Lab Department of Electronics and Information Politecnico di Milano E-mail: bonarini@elet.polimi.it URL:http://www.dei.polimi.it/people/bonarini
Reinforcement Learning II Andrea Bonarini Artificial Intelligence and Robotics Lab Department of Electronics and Information Politecnico di Milano E-mail: bonarini@elet.polimi.it URL:http://www.dei.polimi.it/people/bonarini
RL 3: Reinforcement Learning
 RL 3: Reinforcement Learning Q-Learning Michael Herrmann University of Edinburgh, School of Informatics 20/01/2015 Last time: Multi-Armed Bandits (10 Points to remember) MAB applications do exist (e.g.
RL 3: Reinforcement Learning Q-Learning Michael Herrmann University of Edinburgh, School of Informatics 20/01/2015 Last time: Multi-Armed Bandits (10 Points to remember) MAB applications do exist (e.g.
Chapter 6: Temporal Difference Learning
 Chapter 6: emporal Difference Learning Objectives of this chapter: Introduce emporal Difference (D) learning Focus first on policy evaluation, or prediction, methods hen extend to control methods R. S.
Chapter 6: emporal Difference Learning Objectives of this chapter: Introduce emporal Difference (D) learning Focus first on policy evaluation, or prediction, methods hen extend to control methods R. S.
A Residual Gradient Fuzzy Reinforcement Learning Algorithm for Differential Games
 International Journal of Fuzzy Systems manuscript (will be inserted by the editor) A Residual Gradient Fuzzy Reinforcement Learning Algorithm for Differential Games Mostafa D Awheda Howard M Schwartz Received:
International Journal of Fuzzy Systems manuscript (will be inserted by the editor) A Residual Gradient Fuzzy Reinforcement Learning Algorithm for Differential Games Mostafa D Awheda Howard M Schwartz Received:
Reinforcement Learning
 1 Reinforcement Learning Chris Watkins Department of Computer Science Royal Holloway, University of London July 27, 2015 2 Plan 1 Why reinforcement learning? Where does this theory come from? Markov decision
1 Reinforcement Learning Chris Watkins Department of Computer Science Royal Holloway, University of London July 27, 2015 2 Plan 1 Why reinforcement learning? Where does this theory come from? Markov decision
Marks. bonus points. } Assignment 1: Should be out this weekend. } Mid-term: Before the last lecture. } Mid-term deferred exam:
 Marks } Assignment 1: Should be out this weekend } All are marked, I m trying to tally them and perhaps add bonus points } Mid-term: Before the last lecture } Mid-term deferred exam: } This Saturday, 9am-10.30am,
Marks } Assignment 1: Should be out this weekend } All are marked, I m trying to tally them and perhaps add bonus points } Mid-term: Before the last lecture } Mid-term deferred exam: } This Saturday, 9am-10.30am,
Machine Learning I Reinforcement Learning
 Machine Learning I Reinforcement Learning Thomas Rückstieß Technische Universität München December 17/18, 2009 Literature Book: Reinforcement Learning: An Introduction Sutton & Barto (free online version:
Machine Learning I Reinforcement Learning Thomas Rückstieß Technische Universität München December 17/18, 2009 Literature Book: Reinforcement Learning: An Introduction Sutton & Barto (free online version:
Sequential decision making under uncertainty. Department of Computer Science, Czech Technical University in Prague
 Sequential decision making under uncertainty Jiří Kléma Department of Computer Science, Czech Technical University in Prague /doku.php/courses/a4b33zui/start pagenda Previous lecture: individual rational
Sequential decision making under uncertainty Jiří Kléma Department of Computer Science, Czech Technical University in Prague /doku.php/courses/a4b33zui/start pagenda Previous lecture: individual rational
Grundlagen der Künstlichen Intelligenz
 Grundlagen der Künstlichen Intelligenz Reinforcement learning Daniel Hennes 4.12.2017 (WS 2017/18) University Stuttgart - IPVS - Machine Learning & Robotics 1 Today Reinforcement learning Model based and
Grundlagen der Künstlichen Intelligenz Reinforcement learning Daniel Hennes 4.12.2017 (WS 2017/18) University Stuttgart - IPVS - Machine Learning & Robotics 1 Today Reinforcement learning Model based and
Q-learning. Tambet Matiisen
 Q-learning Tambet Matiisen (based on chapter 11.3 of online book Artificial Intelligence, foundations of computational agents by David Poole and Alan Mackworth) Stochastic gradient descent Experience
Q-learning Tambet Matiisen (based on chapter 11.3 of online book Artificial Intelligence, foundations of computational agents by David Poole and Alan Mackworth) Stochastic gradient descent Experience
Introduction to Reinforcement Learning
 Introduction to Reinforcement Learning Rémi Munos SequeL project: Sequential Learning http://researchers.lille.inria.fr/ munos/ INRIA Lille - Nord Europe Machine Learning Summer School, September 2011,
Introduction to Reinforcement Learning Rémi Munos SequeL project: Sequential Learning http://researchers.lille.inria.fr/ munos/ INRIA Lille - Nord Europe Machine Learning Summer School, September 2011,
Autonomous Helicopter Flight via Reinforcement Learning
 Autonomous Helicopter Flight via Reinforcement Learning Authors: Andrew Y. Ng, H. Jin Kim, Michael I. Jordan, Shankar Sastry Presenters: Shiv Ballianda, Jerrolyn Hebert, Shuiwang Ji, Kenley Malveaux, Huy
Autonomous Helicopter Flight via Reinforcement Learning Authors: Andrew Y. Ng, H. Jin Kim, Michael I. Jordan, Shankar Sastry Presenters: Shiv Ballianda, Jerrolyn Hebert, Shuiwang Ji, Kenley Malveaux, Huy
INF 5860 Machine learning for image classification. Lecture 14: Reinforcement learning May 9, 2018
 Machine learning for image classification Lecture 14: Reinforcement learning May 9, 2018 Page 3 Outline Motivation Introduction to reinforcement learning (RL) Value function based methods (Q-learning)
Machine learning for image classification Lecture 14: Reinforcement learning May 9, 2018 Page 3 Outline Motivation Introduction to reinforcement learning (RL) Value function based methods (Q-learning)
COMP3702/7702 Artificial Intelligence Lecture 11: Introduction to Machine Learning and Reinforcement Learning. Hanna Kurniawati
 COMP3702/7702 Artificial Intelligence Lecture 11: Introduction to Machine Learning and Reinforcement Learning Hanna Kurniawati Today } What is machine learning? } Where is it used? } Types of machine learning
COMP3702/7702 Artificial Intelligence Lecture 11: Introduction to Machine Learning and Reinforcement Learning Hanna Kurniawati Today } What is machine learning? } Where is it used? } Types of machine learning
Chapter 3: The Reinforcement Learning Problem
 Chapter 3: The Reinforcement Learning Problem Objectives of this chapter: describe the RL problem we will be studying for the remainder of the course present idealized form of the RL problem for which
Chapter 3: The Reinforcement Learning Problem Objectives of this chapter: describe the RL problem we will be studying for the remainder of the course present idealized form of the RL problem for which
Reinforcement Learning In Continuous Time and Space
 Reinforcement Learning In Continuous Time and Space presentation of paper by Kenji Doya Leszek Rybicki lrybicki@mat.umk.pl 18.07.2008 Leszek Rybicki lrybicki@mat.umk.pl Reinforcement Learning In Continuous
Reinforcement Learning In Continuous Time and Space presentation of paper by Kenji Doya Leszek Rybicki lrybicki@mat.umk.pl 18.07.2008 Leszek Rybicki lrybicki@mat.umk.pl Reinforcement Learning In Continuous
Introduction to Reinforcement Learning. Part 5: Temporal-Difference Learning
 Introduction to Reinforcement Learning Part 5: emporal-difference Learning What everybody should know about emporal-difference (D) learning Used to learn value functions without human input Learns a guess
Introduction to Reinforcement Learning Part 5: emporal-difference Learning What everybody should know about emporal-difference (D) learning Used to learn value functions without human input Learns a guess
Introduction to Reinforcement Learning
 CSCI-699: Advanced Topics in Deep Learning 01/16/2019 Nitin Kamra Spring 2019 Introduction to Reinforcement Learning 1 What is Reinforcement Learning? So far we have seen unsupervised and supervised learning.
CSCI-699: Advanced Topics in Deep Learning 01/16/2019 Nitin Kamra Spring 2019 Introduction to Reinforcement Learning 1 What is Reinforcement Learning? So far we have seen unsupervised and supervised learning.
Today s s Lecture. Applicability of Neural Networks. Back-propagation. Review of Neural Networks. Lecture 20: Learning -4. Markov-Decision Processes
 Today s s Lecture Lecture 20: Learning -4 Review of Neural Networks Markov-Decision Processes Victor Lesser CMPSCI 683 Fall 2004 Reinforcement learning 2 Back-propagation Applicability of Neural Networks
Today s s Lecture Lecture 20: Learning -4 Review of Neural Networks Markov-Decision Processes Victor Lesser CMPSCI 683 Fall 2004 Reinforcement learning 2 Back-propagation Applicability of Neural Networks
Lecture 7: Value Function Approximation
 Lecture 7: Value Function Approximation Joseph Modayil Outline 1 Introduction 2 3 Batch Methods Introduction Large-Scale Reinforcement Learning Reinforcement learning can be used to solve large problems,
Lecture 7: Value Function Approximation Joseph Modayil Outline 1 Introduction 2 3 Batch Methods Introduction Large-Scale Reinforcement Learning Reinforcement learning can be used to solve large problems,
Variance Reduction for Policy Gradient Methods. March 13, 2017
 Variance Reduction for Policy Gradient Methods March 13, 2017 Reward Shaping Reward Shaping Reward Shaping Reward shaping: r(s, a, s ) = r(s, a, s ) + γφ(s ) Φ(s) for arbitrary potential Φ Theorem: r admits
Variance Reduction for Policy Gradient Methods March 13, 2017 Reward Shaping Reward Shaping Reward Shaping Reward shaping: r(s, a, s ) = r(s, a, s ) + γφ(s ) Φ(s) for arbitrary potential Φ Theorem: r admits
Reinforcement Learning and NLP
 1 Reinforcement Learning and NLP Kapil Thadani kapil@cs.columbia.edu RESEARCH Outline 2 Model-free RL Markov decision processes (MDPs) Derivative-free optimization Policy gradients Variance reduction Value
1 Reinforcement Learning and NLP Kapil Thadani kapil@cs.columbia.edu RESEARCH Outline 2 Model-free RL Markov decision processes (MDPs) Derivative-free optimization Policy gradients Variance reduction Value
Reinforcement learning
 Reinforcement learning Stuart Russell, UC Berkeley Stuart Russell, UC Berkeley 1 Outline Sequential decision making Dynamic programming algorithms Reinforcement learning algorithms temporal difference
Reinforcement learning Stuart Russell, UC Berkeley Stuart Russell, UC Berkeley 1 Outline Sequential decision making Dynamic programming algorithms Reinforcement learning algorithms temporal difference
Chapter 3: The Reinforcement Learning Problem
 Chapter 3: The Reinforcement Learning Problem Objectives of this chapter: describe the RL problem we will be studying for the remainder of the course present idealized form of the RL problem for which
Chapter 3: The Reinforcement Learning Problem Objectives of this chapter: describe the RL problem we will be studying for the remainder of the course present idealized form of the RL problem for which
Partially observable Markov decision processes. Department of Computer Science, Czech Technical University in Prague
 Partially observable Markov decision processes Jiří Kléma Department of Computer Science, Czech Technical University in Prague https://cw.fel.cvut.cz/wiki/courses/b4b36zui/prednasky pagenda Previous lecture:
Partially observable Markov decision processes Jiří Kléma Department of Computer Science, Czech Technical University in Prague https://cw.fel.cvut.cz/wiki/courses/b4b36zui/prednasky pagenda Previous lecture:
The Reinforcement Learning Problem
 The Reinforcement Learning Problem Slides based on the book Reinforcement Learning by Sutton and Barto Formalizing Reinforcement Learning Formally, the agent and environment interact at each of a sequence
The Reinforcement Learning Problem Slides based on the book Reinforcement Learning by Sutton and Barto Formalizing Reinforcement Learning Formally, the agent and environment interact at each of a sequence
Reinforcement Learning. Donglin Zeng, Department of Biostatistics, University of North Carolina
 Reinforcement Learning Introduction Introduction Unsupervised learning has no outcome (no feedback). Supervised learning has outcome so we know what to predict. Reinforcement learning is in between it
Reinforcement Learning Introduction Introduction Unsupervised learning has no outcome (no feedback). Supervised learning has outcome so we know what to predict. Reinforcement learning is in between it
Lecture 25: Learning 4. Victor R. Lesser. CMPSCI 683 Fall 2010
 Lecture 25: Learning 4 Victor R. Lesser CMPSCI 683 Fall 2010 Final Exam Information Final EXAM on Th 12/16 at 4:00pm in Lederle Grad Res Ctr Rm A301 2 Hours but obviously you can leave early! Open Book
Lecture 25: Learning 4 Victor R. Lesser CMPSCI 683 Fall 2010 Final Exam Information Final EXAM on Th 12/16 at 4:00pm in Lederle Grad Res Ctr Rm A301 2 Hours but obviously you can leave early! Open Book
Computational Reinforcement Learning: An Introduction
 Computational Reinforcement Learning: An Introduction Andrew Barto Autonomous Learning Laboratory School of Computer Science University of Massachusetts Amherst barto@cs.umass.edu 1 Artificial Intelligence
Computational Reinforcement Learning: An Introduction Andrew Barto Autonomous Learning Laboratory School of Computer Science University of Massachusetts Amherst barto@cs.umass.edu 1 Artificial Intelligence
Reinforcement Learning
 Reinforcement Learning 1 Reinforcement Learning Mainly based on Reinforcement Learning An Introduction by Richard Sutton and Andrew Barto Slides are mainly based on the course material provided by the
Reinforcement Learning 1 Reinforcement Learning Mainly based on Reinforcement Learning An Introduction by Richard Sutton and Andrew Barto Slides are mainly based on the course material provided by the
REINFORCEMENT LEARNING
 REINFORCEMENT LEARNING Larry Page: Where s Google going next? DeepMind's DQN playing Breakout Contents Introduction to Reinforcement Learning Deep Q-Learning INTRODUCTION TO REINFORCEMENT LEARNING Contents
REINFORCEMENT LEARNING Larry Page: Where s Google going next? DeepMind's DQN playing Breakout Contents Introduction to Reinforcement Learning Deep Q-Learning INTRODUCTION TO REINFORCEMENT LEARNING Contents
Reinforcement Learning and Deep Reinforcement Learning
 Reinforcement Learning and Deep Reinforcement Learning Ashis Kumer Biswas, Ph.D. ashis.biswas@ucdenver.edu Deep Learning November 5, 2018 1 / 64 Outlines 1 Principles of Reinforcement Learning 2 The Q
Reinforcement Learning and Deep Reinforcement Learning Ashis Kumer Biswas, Ph.D. ashis.biswas@ucdenver.edu Deep Learning November 5, 2018 1 / 64 Outlines 1 Principles of Reinforcement Learning 2 The Q
Distributed Optimization. Song Chong EE, KAIST
 Distributed Optimization Song Chong EE, KAIST songchong@kaist.edu Dynamic Programming for Path Planning A path-planning problem consists of a weighted directed graph with a set of n nodes N, directed links
Distributed Optimization Song Chong EE, KAIST songchong@kaist.edu Dynamic Programming for Path Planning A path-planning problem consists of a weighted directed graph with a set of n nodes N, directed links
Lecture 2: Learning from Evaluative Feedback. or Bandit Problems
 Lecture 2: Learning from Evaluative Feedback or Bandit Problems 1 Edward L. Thorndike (1874-1949) Puzzle Box 2 Learning by Trial-and-Error Law of Effect: Of several responses to the same situation, those
Lecture 2: Learning from Evaluative Feedback or Bandit Problems 1 Edward L. Thorndike (1874-1949) Puzzle Box 2 Learning by Trial-and-Error Law of Effect: Of several responses to the same situation, those
Procedia Computer Science 00 (2011) 000 6
 000 6") Procedia Computer Science (211) 6 Procedia Computer Science Complex Adaptive Systems, Volume 1 Cihan H. Dagli, Editor in Chief Conference Organized by Missouri University of Science and Technology 211-
Procedia Computer Science (211) 6 Procedia Computer Science Complex Adaptive Systems, Volume 1 Cihan H. Dagli, Editor in Chief Conference Organized by Missouri University of Science and Technology 211-
Reinforcement Learning and Control
 CS9 Lecture notes Andrew Ng Part XIII Reinforcement Learning and Control We now begin our study of reinforcement learning and adaptive control. In supervised learning, we saw algorithms that tried to make
CS9 Lecture notes Andrew Ng Part XIII Reinforcement Learning and Control We now begin our study of reinforcement learning and adaptive control. In supervised learning, we saw algorithms that tried to make
Every animal is represented by a blue circle. Correlation was measured by Spearman s rank correlation coefficient (ρ).
.") Supplementary Figure 1 Correlations between tone and context freezing by animal in each of the four groups in experiment 1. Every animal is represented by a blue circle. Correlation was measured by Spearman
Supplementary Figure 1 Correlations between tone and context freezing by animal in each of the four groups in experiment 1. Every animal is represented by a blue circle. Correlation was measured by Spearman
Lecture 3: The Reinforcement Learning Problem
 Lecture 3: The Reinforcement Learning Problem Objectives of this lecture: describe the RL problem we will be studying for the remainder of the course present idealized form of the RL problem for which
Lecture 3: The Reinforcement Learning Problem Objectives of this lecture: describe the RL problem we will be studying for the remainder of the course present idealized form of the RL problem for which
Q-Learning in Continuous State Action Spaces
 Q-Learning in Continuous State Action Spaces Alex Irpan alexirpan@berkeley.edu December 5, 2015 Contents 1 Introduction 1 2 Background 1 3 Q-Learning 2 4 Q-Learning In Continuous Spaces 4 5 Experimental
Q-Learning in Continuous State Action Spaces Alex Irpan alexirpan@berkeley.edu December 5, 2015 Contents 1 Introduction 1 2 Background 1 3 Q-Learning 2 4 Q-Learning In Continuous Spaces 4 5 Experimental
CSC321 Lecture 22: Q-Learning
 CSC321 Lecture 22: Q-Learning Roger Grosse Roger Grosse CSC321 Lecture 22: Q-Learning 1 / 21 Overview Second of 3 lectures on reinforcement learning Last time: policy gradient (e.g. REINFORCE) Optimize
CSC321 Lecture 22: Q-Learning Roger Grosse Roger Grosse CSC321 Lecture 22: Q-Learning 1 / 21 Overview Second of 3 lectures on reinforcement learning Last time: policy gradient (e.g. REINFORCE) Optimize
Learning to Control an Octopus Arm with Gaussian Process Temporal Difference Methods
 Learning to Control an Octopus Arm with Gaussian Process Temporal Difference Methods Yaakov Engel Joint work with Peter Szabo and Dmitry Volkinshtein (ex. Technion) Why use GPs in RL? A Bayesian approach
Learning to Control an Octopus Arm with Gaussian Process Temporal Difference Methods Yaakov Engel Joint work with Peter Szabo and Dmitry Volkinshtein (ex. Technion) Why use GPs in RL? A Bayesian approach
The Art of Sequential Optimization via Simulations
 The Art of Sequential Optimization via Simulations Stochastic Systems and Learning Laboratory EE, CS* & ISE* Departments Viterbi School of Engineering University of Southern California (Based on joint
The Art of Sequential Optimization via Simulations Stochastic Systems and Learning Laboratory EE, CS* & ISE* Departments Viterbi School of Engineering University of Southern California (Based on joint
Lecture 3: Markov Decision Processes
 Lecture 3: Markov Decision Processes Joseph Modayil 1 Markov Processes 2 Markov Reward Processes 3 Markov Decision Processes 4 Extensions to MDPs Markov Processes Introduction Introduction to MDPs Markov
Lecture 3: Markov Decision Processes Joseph Modayil 1 Markov Processes 2 Markov Reward Processes 3 Markov Decision Processes 4 Extensions to MDPs Markov Processes Introduction Introduction to MDPs Markov
Reinforcement Learning
 Reinforcement Learning Ron Parr CompSci 7 Department of Computer Science Duke University With thanks to Kris Hauser for some content RL Highlights Everybody likes to learn from experience Use ML techniques
Reinforcement Learning Ron Parr CompSci 7 Department of Computer Science Duke University With thanks to Kris Hauser for some content RL Highlights Everybody likes to learn from experience Use ML techniques
Reinforcement Learning
 CS7/CS7 Fall 005 Supervised Learning: Training examples: (x,y) Direct feedback y for each input x Sequence of decisions with eventual feedback No teacher that critiques individual actions Learn to act
CS7/CS7 Fall 005 Supervised Learning: Training examples: (x,y) Direct feedback y for each input x Sequence of decisions with eventual feedback No teacher that critiques individual actions Learn to act
Markov Decision Processes and Solving Finite Problems. February 8, 2017
 Markov Decision Processes and Solving Finite Problems February 8, 2017 Overview of Upcoming Lectures Feb 8: Markov decision processes, value iteration, policy iteration Feb 13: Policy gradients Feb 15:
Markov Decision Processes and Solving Finite Problems February 8, 2017 Overview of Upcoming Lectures Feb 8: Markov decision processes, value iteration, policy iteration Feb 13: Policy gradients Feb 15:
Policy Gradient Methods. February 13, 2017
 Policy Gradient Methods February 13, 2017 Policy Optimization Problems maximize E π [expression] π Fixed-horizon episodic: T 1 Average-cost: lim T 1 T r t T 1 r t Infinite-horizon discounted: γt r t Variable-length
Policy Gradient Methods February 13, 2017 Policy Optimization Problems maximize E π [expression] π Fixed-horizon episodic: T 1 Average-cost: lim T 1 T r t T 1 r t Infinite-horizon discounted: γt r t Variable-length
An Analytic Solution to Discrete Bayesian Reinforcement Learning
 An Analytic Solution to Discrete Bayesian Reinforcement Learning Pascal Poupart (U of Waterloo) Nikos Vlassis (U of Amsterdam) Jesse Hoey (U of Toronto) Kevin Regan (U of Waterloo) 1 Motivation Automated
An Analytic Solution to Discrete Bayesian Reinforcement Learning Pascal Poupart (U of Waterloo) Nikos Vlassis (U of Amsterdam) Jesse Hoey (U of Toronto) Kevin Regan (U of Waterloo) 1 Motivation Automated
An Introduction to Reinforcement Learning
 1 / 58 An Introduction to Reinforcement Learning Lecture 01: Introduction Dr. Johannes A. Stork School of Computer Science and Communication KTH Royal Institute of Technology January 19, 2017 2 / 58 ../fig/reward-00.jpg
1 / 58 An Introduction to Reinforcement Learning Lecture 01: Introduction Dr. Johannes A. Stork School of Computer Science and Communication KTH Royal Institute of Technology January 19, 2017 2 / 58 ../fig/reward-00.jpg
Key concepts: Reward: external «cons umable» s5mulus Value: internal representa5on of u5lity of a state, ac5on, s5mulus W the learned weight associate
 Key concepts: Reward: external «cons umable» s5mulus Value: internal representa5on of u5lity of a state, ac5on, s5mulus W the learned weight associated to the value Teaching signal : difference between
Key concepts: Reward: external «cons umable» s5mulus Value: internal representa5on of u5lity of a state, ac5on, s5mulus W the learned weight associated to the value Teaching signal : difference between
MS&E338 Reinforcement Learning Lecture 1 - April 2, Introduction
 MS&E338 Reinforcement Learning Lecture 1 - April 2, 2018 Introduction Lecturer: Ben Van Roy Scribe: Gabriel Maher 1 Reinforcement Learning Introduction In reinforcement learning (RL) we consider an agent
MS&E338 Reinforcement Learning Lecture 1 - April 2, 2018 Introduction Lecturer: Ben Van Roy Scribe: Gabriel Maher 1 Reinforcement Learning Introduction In reinforcement learning (RL) we consider an agent
Model- based fmri analysis. Shih- Wei Wu fmri workshop, NCCU, Jan. 19, 2014
 Model- based fmri analysis Shih- Wei Wu fmri workshop, NCCU, Jan. 19, 2014 Outline: model- based fmri analysis I: General linear model: basic concepts II: Modeling how the brain makes decisions: Decision-
Model- based fmri analysis Shih- Wei Wu fmri workshop, NCCU, Jan. 19, 2014 Outline: model- based fmri analysis I: General linear model: basic concepts II: Modeling how the brain makes decisions: Decision-
Reinforcement Learning: the basics
 Reinforcement Learning: the basics Olivier Sigaud Université Pierre et Marie Curie, PARIS 6 http://people.isir.upmc.fr/sigaud August 6, 2012 1 / 46 Introduction Action selection/planning Learning by trial-and-error
Reinforcement Learning: the basics Olivier Sigaud Université Pierre et Marie Curie, PARIS 6 http://people.isir.upmc.fr/sigaud August 6, 2012 1 / 46 Introduction Action selection/planning Learning by trial-and-error
Reinforcement Learning. Spring 2018 Defining MDPs, Planning
 Reinforcement Learning Spring 2018 Defining MDPs, Planning understandability 0 Slide 10 time You are here Markov Process Where you will go depends only on where you are Markov Process: Information state
Reinforcement Learning Spring 2018 Defining MDPs, Planning understandability 0 Slide 10 time You are here Markov Process Where you will go depends only on where you are Markov Process: Information state
Markov Models and Reinforcement Learning. Stephen G. Ware CSCI 4525 / 5525
 Markov Models and Reinforcement Learning Stephen G. Ware CSCI 4525 / 5525 Camera Vacuum World (CVW) 2 discrete rooms with cameras that detect dirt. A mobile robot with a vacuum. The goal is to ensure both
Markov Models and Reinforcement Learning Stephen G. Ware CSCI 4525 / 5525 Camera Vacuum World (CVW) 2 discrete rooms with cameras that detect dirt. A mobile robot with a vacuum. The goal is to ensure both
Exponential Moving Average Based Multiagent Reinforcement Learning Algorithms
 Exponential Moving Average Based Multiagent Reinforcement Learning Algorithms Mostafa D. Awheda Department of Systems and Computer Engineering Carleton University Ottawa, Canada KS 5B6 Email: mawheda@sce.carleton.ca
Exponential Moving Average Based Multiagent Reinforcement Learning Algorithms Mostafa D. Awheda Department of Systems and Computer Engineering Carleton University Ottawa, Canada KS 5B6 Email: mawheda@sce.carleton.ca
CMU Lecture 12: Reinforcement Learning. Teacher: Gianni A. Di Caro
 CMU 15-781 Lecture 12: Reinforcement Learning Teacher: Gianni A. Di Caro REINFORCEMENT LEARNING Transition Model? State Action Reward model? Agent Goal: Maximize expected sum of future rewards 2 MDP PLANNING
CMU 15-781 Lecture 12: Reinforcement Learning Teacher: Gianni A. Di Caro REINFORCEMENT LEARNING Transition Model? State Action Reward model? Agent Goal: Maximize expected sum of future rewards 2 MDP PLANNING
Reinforcement Learning
 Reinforcement Learning RL in continuous MDPs March April, 2015 Large/Continuous MDPs Large/Continuous state space Tabular representation cannot be used Large/Continuous action space Maximization over action
Reinforcement Learning RL in continuous MDPs March April, 2015 Large/Continuous MDPs Large/Continuous state space Tabular representation cannot be used Large/Continuous action space Maximization over action
An Adaptive Clustering Method for Model-free Reinforcement Learning
 An Adaptive Clustering Method for Model-free Reinforcement Learning Andreas Matt and Georg Regensburger Institute of Mathematics University of Innsbruck, Austria {andreas.matt, georg.regensburger}@uibk.ac.at
An Adaptive Clustering Method for Model-free Reinforcement Learning Andreas Matt and Georg Regensburger Institute of Mathematics University of Innsbruck, Austria {andreas.matt, georg.regensburger}@uibk.ac.at
Reinforcement Learning for Continuous. Action using Stochastic Gradient Ascent. Hajime KIMURA, Shigenobu KOBAYASHI JAPAN
 Reinforcement Learning for Continuous Action using Stochastic Gradient Ascent Hajime KIMURA, Shigenobu KOBAYASHI Tokyo Institute of Technology, 4259 Nagatsuda, Midori-ku Yokohama 226-852 JAPAN Abstract:
Reinforcement Learning for Continuous Action using Stochastic Gradient Ascent Hajime KIMURA, Shigenobu KOBAYASHI Tokyo Institute of Technology, 4259 Nagatsuda, Midori-ku Yokohama 226-852 JAPAN Abstract:
Lecture 8: Policy Gradient
 Lecture 8: Policy Gradient Hado van Hasselt Outline 1 Introduction 2 Finite Difference Policy Gradient 3 Monte-Carlo Policy Gradient 4 Actor-Critic Policy Gradient Introduction Vapnik s rule Never solve
Lecture 8: Policy Gradient Hado van Hasselt Outline 1 Introduction 2 Finite Difference Policy Gradient 3 Monte-Carlo Policy Gradient 4 Actor-Critic Policy Gradient Introduction Vapnik s rule Never solve
An Introduction to Reinforcement Learning
 An Introduction to Reinforcement Learning Shivaram Kalyanakrishnan shivaram@cse.iitb.ac.in Department of Computer Science and Engineering Indian Institute of Technology Bombay April 2018 What is Reinforcement
An Introduction to Reinforcement Learning Shivaram Kalyanakrishnan shivaram@cse.iitb.ac.in Department of Computer Science and Engineering Indian Institute of Technology Bombay April 2018 What is Reinforcement
Machine Learning. Machine Learning: Jordan Boyd-Graber University of Maryland REINFORCEMENT LEARNING. Slides adapted from Tom Mitchell and Peter Abeel
 Machine Learning Machine Learning: Jordan Boyd-Graber University of Maryland REINFORCEMENT LEARNING Slides adapted from Tom Mitchell and Peter Abeel Machine Learning: Jordan Boyd-Graber UMD Machine Learning
Machine Learning Machine Learning: Jordan Boyd-Graber University of Maryland REINFORCEMENT LEARNING Slides adapted from Tom Mitchell and Peter Abeel Machine Learning: Jordan Boyd-Graber UMD Machine Learning
Planning in Markov Decision Processes
 Carnegie Mellon School of Computer Science Deep Reinforcement Learning and Control Planning in Markov Decision Processes Lecture 3, CMU 10703 Katerina Fragkiadaki Markov Decision Process (MDP) A Markov
Carnegie Mellon School of Computer Science Deep Reinforcement Learning and Control Planning in Markov Decision Processes Lecture 3, CMU 10703 Katerina Fragkiadaki Markov Decision Process (MDP) A Markov
CS 7180: Behavioral Modeling and Decisionmaking
 CS 7180: Behavioral Modeling and Decisionmaking in AI Markov Decision Processes for Complex Decisionmaking Prof. Amy Sliva October 17, 2012 Decisions are nondeterministic In many situations, behavior and
CS 7180: Behavioral Modeling and Decisionmaking in AI Markov Decision Processes for Complex Decisionmaking Prof. Amy Sliva October 17, 2012 Decisions are nondeterministic In many situations, behavior and
CS 4100 // artificial intelligence. Recap/midterm review!
 CS 4100 // artificial intelligence instructor: byron wallace Recap/midterm review! Attribution: many of these slides are modified versions of those distributed with the UC Berkeley CS188 materials Thanks
CS 4100 // artificial intelligence instructor: byron wallace Recap/midterm review! Attribution: many of these slides are modified versions of those distributed with the UC Berkeley CS188 materials Thanks
Reinforcement Learning as Classification Leveraging Modern Classifiers
 Reinforcement Learning as Classification Leveraging Modern Classifiers Michail G. Lagoudakis and Ronald Parr Department of Computer Science Duke University Durham, NC 27708 Machine Learning Reductions
Reinforcement Learning as Classification Leveraging Modern Classifiers Michail G. Lagoudakis and Ronald Parr Department of Computer Science Duke University Durham, NC 27708 Machine Learning Reductions
Deep Reinforcement Learning. STAT946 Deep Learning Guest Lecture by Pascal Poupart University of Waterloo October 19, 2017
 Deep Reinforcement Learning STAT946 Deep Learning Guest Lecture by Pascal Poupart University of Waterloo October 19, 2017 Outline Introduction to Reinforcement Learning AlphaGo (Deep RL for Computer Go)
Deep Reinforcement Learning STAT946 Deep Learning Guest Lecture by Pascal Poupart University of Waterloo October 19, 2017 Outline Introduction to Reinforcement Learning AlphaGo (Deep RL for Computer Go)
Planning by Probabilistic Inference
 Planning by Probabilistic Inference Hagai Attias Microsoft Research 1 Microsoft Way Redmond, WA 98052 Abstract This paper presents and demonstrates a new approach to the problem of planning under uncertainty.
Planning by Probabilistic Inference Hagai Attias Microsoft Research 1 Microsoft Way Redmond, WA 98052 Abstract This paper presents and demonstrates a new approach to the problem of planning under uncertainty.
Open Theoretical Questions in Reinforcement Learning
 Open Theoretical Questions in Reinforcement Learning Richard S. Sutton AT&T Labs, Florham Park, NJ 07932, USA, sutton@research.att.com, www.cs.umass.edu/~rich Reinforcement learning (RL) concerns the problem
Open Theoretical Questions in Reinforcement Learning Richard S. Sutton AT&T Labs, Florham Park, NJ 07932, USA, sutton@research.att.com, www.cs.umass.edu/~rich Reinforcement learning (RL) concerns the problem
Machine Learning. Reinforcement learning. Hamid Beigy. Sharif University of Technology. Fall 1396
 Machine Learning Reinforcement learning Hamid Beigy Sharif University of Technology Fall 1396 Hamid Beigy (Sharif University of Technology) Machine Learning Fall 1396 1 / 32 Table of contents 1 Introduction
Machine Learning Reinforcement learning Hamid Beigy Sharif University of Technology Fall 1396 Hamid Beigy (Sharif University of Technology) Machine Learning Fall 1396 1 / 32 Table of contents 1 Introduction
Reinforcement Learning
 Reinforcement Learning Function approximation Mario Martin CS-UPC May 18, 2018 Mario Martin (CS-UPC) Reinforcement Learning May 18, 2018 / 65 Recap Algorithms: MonteCarlo methods for Policy Evaluation
Reinforcement Learning Function approximation Mario Martin CS-UPC May 18, 2018 Mario Martin (CS-UPC) Reinforcement Learning May 18, 2018 / 65 Recap Algorithms: MonteCarlo methods for Policy Evaluation
A Behaviouristic Model of Signalling and Moral Sentiments
 A Behaviouristic Model of Signalling and Moral Sentiments Johannes Zschache, University of Leipzig Monte Verità, October 18, 2012 Introduction Model Parameter analysis Conclusion Introduction the evolution
A Behaviouristic Model of Signalling and Moral Sentiments Johannes Zschache, University of Leipzig Monte Verità, October 18, 2012 Introduction Model Parameter analysis Conclusion Introduction the evolution
Lecture 3: Policy Evaluation Without Knowing How the World Works / Model Free Policy Evaluation
 Lecture 3: Policy Evaluation Without Knowing How the World Works / Model Free Policy Evaluation CS234: RL Emma Brunskill Winter 2018 Material builds on structure from David SIlver s Lecture 4: Model-Free
Lecture 3: Policy Evaluation Without Knowing How the World Works / Model Free Policy Evaluation CS234: RL Emma Brunskill Winter 2018 Material builds on structure from David SIlver s Lecture 4: Model-Free
Zero-Sum Stochastic Games An algorithmic review
 Zero-Sum Stochastic Games An algorithmic review Emmanuel Hyon LIP6/Paris Nanterre with N Yemele and L Perrotin Rosario November 2017 Final Meeting Dygame Dygame Project Amstic Outline 1 Introduction Static
Zero-Sum Stochastic Games An algorithmic review Emmanuel Hyon LIP6/Paris Nanterre with N Yemele and L Perrotin Rosario November 2017 Final Meeting Dygame Dygame Project Amstic Outline 1 Introduction Static