Probabilistic micro-earthquake location for reservoir monitoring and characterization
|
|
|
- Willa Lloyd
- 5 years ago
- Views:
Transcription
1 CWP-63 Probabilistic icro-earthquake location for reservoir onitoring and characterization Ran Xuan and Paul Sava Center for Wave Phenoena, Colorado School of Mines ABSTRACT Micro-seisicity is used to onitor fluid igration during reservoir production and hydro-fracturing operations. This is usually done with sparse networks of seisic sensors located in boreholes. The data used for icro-earthquake onitoring are corrupted by noise which reduces the signal-to-noise ratio to values as low as.. Monitoring ethods based on traveltie picking of various wave odes (P or S) cannot deal with this level of noise and require extensive user interaction. An alternative class of ethods uses tie reversal to focus icro-earthquake inforation at the source position. These ethods can handle noisier signals, but are also costlier to run. The technique advocated in this paper exploits tie-reversal within the general fraework of Bayesian inversion. Given an assuption about the possible locations of icro-earthquakes, we use recorded data to evaluate the feasibility of icro-earthquakes occurring at various locations in the Earth. The ethod takes into account iaging iperfections due to unknown coponents of the odel or acquisition array aperture. We siulate wavefields corresponding to possible sources distributed in the odel and evaluate their atch with the wavefield reconstructed fro real data recorded in the field. In this regard, the ethod operates like a patternrecognition procedure and can exploit a wide variety of techniques designed for this purpose. We use siple cross-correlation to take advantage of the speed and robustness of this technique. The wavefields reconstructed at various locations are used to scan over tie the wavefield constructed fro field data, thus our ethod is able to identify not only the position of the icro-earthquakes but also their onset ties. The final outcoe of this autoated process is a ap of probabilities indicating the confidence of icro-earthquake occurrence at various positions and ties. Key words: wave equation, iaging INTRODUCTION High-pressure fluid injected into oil and gas reservoirs causes tie-invariant stress and strain changes. When the stress exceeds a threshold characterizing the resistance of rock aterials to stress, icro-seisicity is triggered by the release of pressure along pre-existing fractures or through the creation of new fractures (Maxwell & Urbancic, ; Duncan, ). Precisely locating icro-seisic events can be used to onitor the hydraulic fracturing and for reservoir characterization (Rentsch, 4). Most location ethods currently used require the identification of seisic arrivals which involves accurate picking of P- and S-wave arrival ties. The onset tie and the coordinates of the hypocenter of icro-seisic events are given by calculations which require accurate knowledge of the velocity odel and of the physical relationships describing wave propagation in the subsurface. The source is located by optiizing a isfit function between easured and calculated quantities (Pujol, 4; Lay & Wallace, 99; Thurber & Rabinowitz, ). The ethods in this category assue that the arrival tie of a specific event can be identified on seisic
2 4 R. Xuan & P. Sava traces (Gajewski, 7). However, event identification is not always possible due to the typically low signal-tonoise ratio (SNR) characterizing icro-seisic events. Furtherore, such location ethods strongly depend on the picking accuracy of P- and S-wave arrival ties and have a low degree of autoation (Rentsch, 7). In contrast to the ethods based on picked arrival ties, igration-based ethods use the full seisic wavefield to locate icro-seisic events. The ain advantage provided by the ethods in this category is that they are independent of the picking of specific arrivals and can locate weak events by focusing energy at the source using tie-reversal (Gajewski, ). The drawback of ethods in this category is the high coputational cost which liits their practical use. However, this drawback becoes less and less of a proble due to the significant advances in coputer hardware, which allow for fast processing of large volues of data. Within the context of igration-based ethods, we advocate in this paper a new ethodology which can be used to autoatically identify and locate sources of icro-seisicity. We use tie-reversal based on nueric solutions to the acoustic wave-equation to reconstruct seisic wavefields in the space around the possible source position and at ties around the possible onset tie of seisic events. Ideally, the energy corresponding to a icro-seisic event focuses at soe tie and soe position in space. However, due to the incoplete acquisition, inaccuracies of the velocity odel and noise present in data, this focus is hard to identify or ay not even for at all. We address this proble by constructing at various locations in the odel and at various ties ideal wavefields which we would record given the field acquisition geoetry and the velocity odel in the region under investigation if a icro-earthquake source would be located at that position and tie. Then, we eploy a pattern atching procedure to copare the reconstructed wavefields based on field data with our siulated wavefields and identify the ost probable locations and onset ties of icro-seisic events. This process exploits the kineatic properties of the focused wavefields and takes advantage of the distortions caused by the incoplete acquisition in the area under investigation. Given the uncertainty characterizing the process of icro-earthquake identification, we do not construct our results as precise positions and onset ties. Instead, we construct aps of probability indicating the likelihood that a icro-seisic source exists at a given position in space and a given tie. We construct our solutions using Bayesian inversion theory which siply states that inversion is a process which refines our state of knowledge. The Bayesian theory discusses about a prior state of knowledge which incorporates our knowledge about our syste in absence of any easureents and about a posterior state of knowledge which cobines the prior with additional knowledge acquired fro new easureents. We begin the paper with a review of Bayesian inversion theory applied to the proble of icro-earthquake identification and illustrate our technique with synthetic data exaples. 2 A METHODOLOGY FOR AUTOMATIC MICRO-SEISMIC LOCATION 2. Bayesian inversion theory Bayesian inversion theory uses probability density functions as a easureent of a given state of knowledge (Jaynes, 3). A crucial features of Bayesian theory is that a probability can be assigned to a hypothesis. According to the Bayesian theory, we begin our investigation with a certain state of knowledge which is independent of any subsequent easureent we ake. We assign to any possible odel acceptable to our prior state of knowledge a likelihood which is quantifies how probable a particular odel is to represent reality (Tarantola, ). The posterior cobines our prior understanding of the odel paraeters with additional inforation derived fro easureents and assuptions about the physical laws governing the process under investigation. This approach allows us to incorporate any a priori inforation in the data, paraeters and theory. As discussed by Tarantola (), the posterior state of inforation is obtained using the Bayes theore ρ(, d)θ(, d) σ(, d) = k, () µ(, d) where represents the odel, d represents the data, ρ(, d) represents the a priori state of inforation, Θ(, d) represents the theoretical state of inforation, µ(, d) represents the hoogeneous state of inforation, k represents a noralization constant, and σ(, d) represents the a posteriori state of inforation. According to equation, the a posteriori state of inforation σ(, d) is coputed by cobining the theoretical function Θ(, d) with the prior inforation ρ(, d). The solution to the inversion proble is given by σ M () which represents the posterior arginal probability on the odel space and is obtained by integrating the a posteriori probability density function over data: Z σ M () = σ(, d)dd, (2) D where D is the data space. When the uncertainty associated with the kernel function is negligible, σ M () is σ M () = νρ M ()ρ D (G(), d obs ), (3) where ρ M () is the prior state of inforation on the odel space, ρ D (d) is the prior inforation on the data
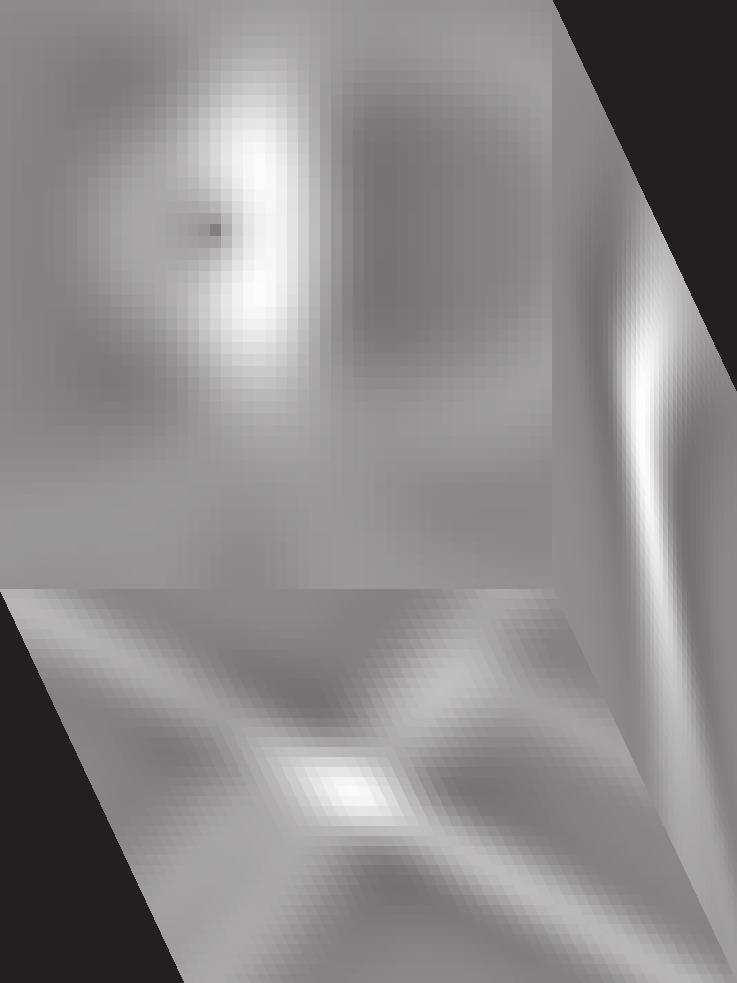
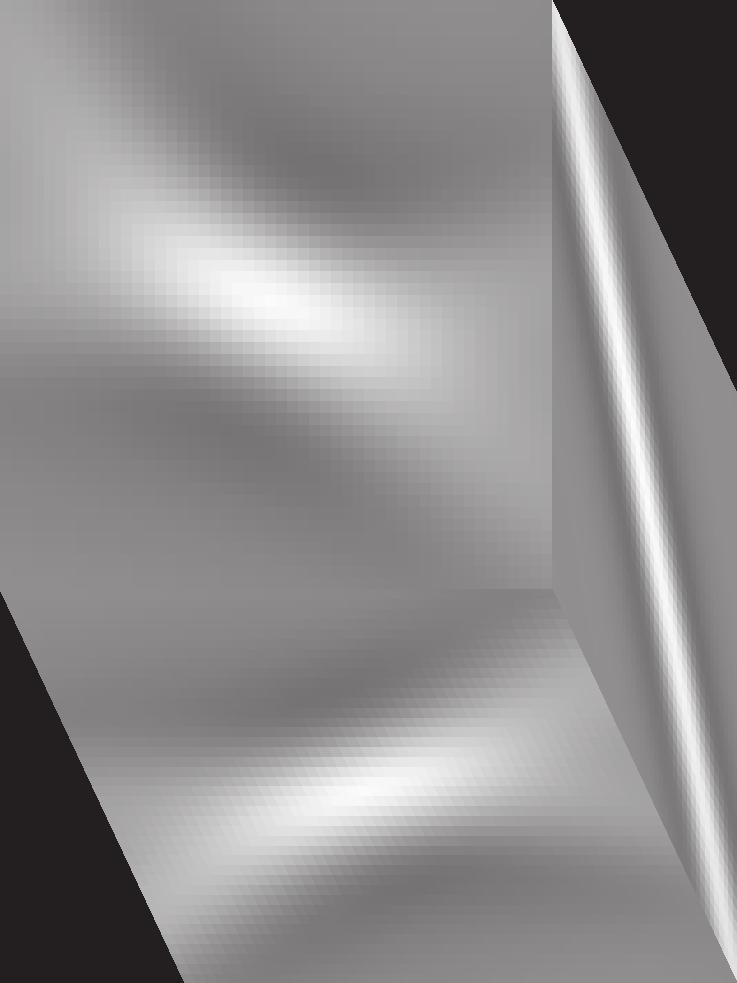
3 Probabilistic icro-seisic iaging (a) (b) Figure. (a) The velocity odel used for the kernel function and (b) the velocity odel with rando variability used to siulate data. The rando velocity in panel (b) is the su of the velocity in odel (a) with correlated Gaussian noise with a agnitude of 4% of the background. The background velocity odel is sapled every 2 and ranges between 9 and 24 /s. The acquisition array consists of receivers placed at x = k with a spacing of 4. We siulate an explosive seisic source at x =.36 k and z =.333 k.
4 6 R. Xuan & P. Sava space, and ν is a noralization constant. A suary of Bayesian inversion theory is presented in Appendix A. We apply the Bayesian inversion theory to solve the proble of icro-earthquake identification. The locations corresponding to icro-seisic events are provided by incorporating inforation fro recorded seisogras with prior inforation on the events, e.g. possible locations and onset tie of the events, as well as physical relations between the odel and data. The odel paraeters used for the icroearthquake location proble are = {x, t}, where x = {x, y, z} describes the position of a icro-seisic in space and t describes the onset tie. The data d represent the wavefields reconstructed fro recorded seisogras in the space around the ost probable icroearthquake source locations and onset ties. In this context, it is irrelevant whether the data are acquired in a borehole, on the surface, or using a cobination of borehole and surface arrays. The data paraeters D(x, t) are voxels of the 4-D wavefield. Each odel has only one datu because there is one wavefield characterizing one icro-seisic event in space and tie. The kernel function G() describes the theoretical relationship between the data and odel. As discussed earlier, we evaluate data for all possible odels by taking into consideration the velocity in the region under investigation and the acquisition geoetry used for the field experient. In our case, the kernel function is based on the two-way acoustic wave-equation and is constructed using the following steps: First, for a given odel () characterized by the onset tie t and location x, we propagate waves forward fro the source using the velocity c(x) according to the two-way acoustic wave-equation c 2 Ü = 2 U + f(, t), (4) where f(, t) is the considered source wavelet and U(x, t) represents the seisic wavefield siulated forward in tie. Second, the forward wavefield is recorded at receiver coordinates x arbitrarily located in space: R(x, t) = U(x = x, t), () where R(x, t) represents the recorded seisogra. Third, the recorded seisogra is tie reversed and propagated backward in tie fro the acquisition array to reconstruct the wavefield at all locations in space and all ties within the window considered for our prior odel. This step is also based on the two-way acoustic wave-equation c 2 D = 2 D + R(x, t), (6) where D(x, t) are the data paraeters as explained earlier. For a given odel, we refer to the data calculated using this procedure as the predicted data D pre. In contrast, we refer to the wavefields reconstructed fro field seisogras as the observed data D obs. We illustrate our ethod with a 2D synthetic exaple. We assue that we use the velocity shown in Figure (a) as the background velocity to construct the predicted data. We consider the velocity shown in Figure (b) as the true velocity which is used to siulate the field seisogras. We siulate data by considering a icro-seisic source at t = {x t, z t, t t}, where the subscript t indicates the true position of the source. The wavefield siulated for this event is calculated using, v Ü = 2 U + f( t, t), (7) where v(x) is the velocity shown in Figure (b). The siulated synthetic seisogra is shown in Figure 2. We assue that the velocity v is unknown during the inversion process The prior inforation on the odel We assue that the hypocenter and the onset tie of icro-seisic events ay be located with equal probability within a certain space doain and tie interval. Thus, we represent this prior knowledge on the odel space as a boxcar function in space and tie. The prior probability ρ M () = within this region of space and tie and elsewhere. We uniforly saple the odel space within this region. The nuber of odels located in this space is n x n z, where n x and n z represent the nubers of odels along the x and z axes, respectively. In our exaple we saple the odel paraeters every 4, and soe of the locations for which we siulate data using our procedure are shown in Figure 3. By selecting a finite nuber of possible source positions, we both exploit our knowledge about the true source location and reduce coputational tie. The assuption we ake here is that the data (reconstructed wavefield corresponding to the recorded seisogras) characterize with equal probability all odels within our selected odel space, as illustrated in Figure (a) The theoretical inforation on odel and data For all odels within our selected region of space, we copute the corresponding wavefield by the forward/backward procedure outlined in the preceding section. In our case, we assue that each odel corresponds to one dataset and that all siulated data are equally probable to explain the recorded data. This construction, which corresponds to the illustration in Figure (b), applies the kernel functions G linking theoretically individual ebers of the odel and data spaces.
5 Probabilistic icro-seisic iaging 7 Figure 2. The synthetic seisogra siulated using the velocity odel shown in Figure (b). We consider an absorbing surface. The source used to siulate this event is a Ricker wavelet with a doinant frequency of Hz. A total of tie steps with a tie increent of.2 s are calculated. Figure 3. A scheatic representation of the a priori inforation on the odel space. We assue that the icro-earthquakes occur in the region indicated by the dense dots between x =. k and z =.. k. A siilar discrete set of possible onset ties are defined along the tie axis.
6 8 R. Xuan & P. Sava We asseble all those calculations in a database of wavefields which is used to copare with data reconstructed fro the field seisogras. Figure 4 illustrates the wavefield database at all locations indicated by dots in Figure 3. The size of the cubes in Figure 4 is two wavelengths in space and two periods in tie. The kernel functions constructed with this procedure are functions of the velocity, the acquisition geoetry and the source type. We refer to the predicted data calculated fro the odels defined by ρ M () for the fixed velocity odel, layout of receivers and source type as the reconstructed wavefield database. This database only needs to be calculated once as long as we keep the subsurface velocity and acquisition geoetry fixed. If two sources are located at the sae position but have different onset ties, the refocused fields of these two events are the sae. It is sufficient to copute data for one onset ties and then copare these siulated wavefields with the wavefields reconstructed fro field seisographs at various ties. Thus we can not only identify the location of the source, but we can also identify the onset tie. In an ideal case, if the sources are copletely surrounded by receives, the wavefronts reconstructed by tie reversal should focus into a point at the source location and at the onset tie. However, typical acquisition arrays are liited to a relatively sall region of space. In the exaple shown in Figure 3, receivers are placed along a borehole located at x = k. For liited aperture of receivers, the wavefronts do not focus at the source location. As illustrated in Figure, the cross-range resolution C r of the refocused field at t = s increases when the range decreases, but the range resolution does not change uch. The relationship between the cross-range resolution C r and the range L is C r = λ L/a, where λ is the wavelength and a is the array aperture (Born & Wolf, 3). The wavefront shape at t = s is controlled by the range and the cross-range for a fixed array aperture and wavelength. It is apparent not only that the focus is incoplete, but that the shape of the reconstructed wavefields changes in space corresponding to the relative positions to the acquisition array as well as the velocity distribution in space The prior inforation on the data As discussed earlier, we refer to data as reconstructed wavefields at all locations in space and within a given tie window. We loop over the odels provided by ρ M () and look for the ties and locations in space where data reconstructed fro recorded seisogras atch the siulated data at locations where we assue that icro-seisic events are located. We can conceptually describe the process as easuring the siilarity between ulti-diensional iages. Various ethods can be used to copare the siilarity between the predicted data and the observed data. These ethods include cross-correlation, su-of-squared differences, and ratio iage unifority, which are three of the ost coon area-based ethods used in edical iage registration to copare the iages of the sae odality (Zitova & Flusser, 3). In this work, we use noralized cross-correlation (N cc) to easure the siilarity between theoretical wavefields and wavefields reconstructed fro field seisogras. By definition, we copute noralized cross-correlation by the expression s N cc() = P x+m x x+m P x x M x t+m P t t+m P t t M t (D obs D obs )(G() G()) x+m P x t+m P t (D obs D obs ) 2 (G() G()) 2 x M x t M t x M x k=t M t (8) where the overline denotes average values, D obs are the observed data, and G() are the predicted data. The size of the averaging window is (2M x + ) (2M t + ), where x = {x, y, z}. The noralized cross-correlation is evaluated at the locations of every odel. The values of N cc are between and +. Using this equation, we pinpoint the odel which generates the highest N cc. In ters of Bayesian inversion, this process of identification of the ost probable odel corresponds to the conjunction of the prior and theoretical probabilities, as indicated in Figures (c)-(d). The size of the window used in the weighting function affects the value of N cc() and its identification power. Four snapshots of the wavefield reconstructed fro the seisogra given by Figure 2 are shown in Figures 6(a)-6(d). The reconstructed wavefields are syetric about to the borehole axis, which creates an abiguity in the identification of icro-earthquake sources. In general, eliinating this abiguity required additional aziuthal coverage, e.g. fro additional boreholes or fro the surface. In our synthetic exaple, we eliinate this abiguity by the choice of the prior inforation. We assue that there is no error associated with the theoretical inforation, but that errors are introduced by the easureent uncertainty of the observed data. We also assue that the error is distributed in a Gaussian distribution and we give the highest probability to the odel which generates the sallest data isfit. The probability density function based on the noralized cross-correlation given by equation 8 is σ M () = ρ M ()e ( Ncc) 2 2C d, (9) where C d is the easureent uncertainty. The larger the value of C d, the flatter the distribution of σ M (). When C d is sall, σ M () tends toward a delta function. We expect that for the distribution of σ M (), the radius of the contour with a value of.9 is half the wavelength because the location error of the N cc ethod is,






7 Probabilistic icro-seisic iaging Figure 4. Seisic wavefield database. The center of each cube is the source location of the predicted data. 9




8 R. Xuan & P. Sava Z Figure. Scheatic of the range and cross-range paraeters characterizing the resolution of the refocused field. The regular polygons represent receivers and the circle represents the source location. The shortest distance between the source and the array is called range L. The shortest distance between the source and the line which is perpendicular to the center of the array is called cross-range C. L C X (a) (b) (c) (d) Figure 6. Four snapshots of the observed data. The wave field defocuses when it oves away fro the source location. It is hard to choose between (a) and (b) by anual picking.

9 Probabilistic icro-seisic iaging 2 (a) (b) Figure 7. (a) Noralized cross-correlation. (b) Probability distribution based on the noralized cross-correlation value. The easureent uncertainty controls the width of the probability distribution around the axiu value. Figure 8. One snapshot of the probability density function, where the dot is the hypocenter of the icro-earthquake. The outer contour has probability of.8 and the contour interval is..
10 22 R. Xuan & P. Sava less than half of the wavelength. Figures 7(a)-7(b) show a coparison between the noralized cross-correlation and the associated probability given by equation 9. One snapshot of Figure 7(b) is shown in Figure 8 and the radius of the contour with a value of.9 is about. We can conclude that a icro-seisic event is located within this contour with a probability of.9. We copute noralized cross-correlation by coparing the precalculated wavefield database with the observed data, as shown in Figure 7(a). The axiu N cc value is.99 at x = 32, z = 334, t =.44 s. However, the N cc value is.98 at x = 36, z = 334, t =.42 s. These two values are very close to each other and it would be unwise to pick one without taking the other into consideration. Therefore, instead of selecting a single odel as the answer, we construct a probability distribution characterizing various odels and their likelihood to represent sources of icro-earthquakes. 3 SYNTHETIC EXAMPLE In the preceding section, we deonstrate icroearthquake location in the case when only one seisic event occurs in a region during a tie interval. However, a ore coon situation is that ultiple icro-seisic events occur ore-or-less at the sae tie and overlap in space during a given tie interval. In this section we deonstrate our ethodology on another exaple with ultiple overlapping events. The otivation for such an experient derives fro field observations about how fractures propagate during fluid injection. By spatially apping the signals eitted by icro-earthquakes, we can onitor the extensions of fractures (Keppler et al., 982; Shapiro et al., 6). Nuerous field observations indicate that the seisic zone surrounds the fractures and fors an elongated pattern (Phillipsa, 998; Rutledge & Phillips, ; House, 987). In this nueric experient, we assue that the icro-seisic events are distributed along a fracture located at z =.326 k, as indicated in Figure 9. The opening of this fracture siulates high-pressure stea injected into the borehole located at x = k. The triggering tie of icro-seisic event varies linearly with the distance fro the injection point. The differences between the onset ties of nearby events is greater than one period. For siplicity, we assue that the agnitude of all icro-earthquakes is the sae, and that the sources are characterized by Ricker wavelets with a doinant frequency of Hz. Figure shows the siulated seisogra characterizing all the events. The seisogra is containated with two types of noise. The first type of noise is due to odel heterogeneities which we assue that we do not know in the iaging process. The second type of noise is corresponding to the experient being run in a noisy environent. The frequency band of the rando noise is 4 Hz overlapping with the icro-earthquake band. The SNR for this exaple is as low as.. We assue that easureent uncertainties are.64 because of the low SNR. We siulate icro-earthquakes and attept to locate all of the with our ethodology, as seen in Figures (a)-(h). The contours shown indicate the probability of earthquakes occurrence at various ties and range fro.8 to.9 with a contour interval of.. Figure (a) shows the results obtained for a icroearthquake occurring at = {x, z, t} = {.2 k,.326 k,.2 s}. This point is included in the contour corresponding to.9 confidence, indicating the success of our procedure. Figure (b) shows two events, 4 = {.4 k,.34 k,.6 s} and = {.2 k,.326 k,.24 s} located within the contour with a confidence level of.9. This exaple shows that our procedure ay not have the resolution to distinguish aong events that are located too close to one-another. The true location of the second events is indicated by the contours shown in Figure (c). However, this apparent isatch is not a big proble because both regions indicate the presence of icro-earthquakes and they overlap in space and tie. Other choice of paraeters, e.g. in the definition of the wavefield database, ight increase the spatial resolution of the identification. This exaple also sees to indicate the presence of another event located inside the contour centered at about {x =.7 k, z =. k}. This is siply an artifact since no event occurs at this position and tie in our siulation. Figure (d) shows the event 8 = {.72 k,.33 k,.32 s} located within the contour with a confidence value of.9. Figure (e) shows that the event at 2 = {.2 k,.33 k,.2 s} is not located within the contours obtained by our inversion. In this case, our ethod fails. This phenoenon is likely due to the fact that ultiple icro-earthquakes overlap in this region creating false foci that asquerade as real events. Figure (f) shows the event 4 = {.32 k,.326 k,.62 s} located within the contour with a confidence value of.9. Figure (g) shows the event at = {.44 k,.334 k,.68 s} located within the contour with a confidence value of.8. Although we successfully identify this event and the experient sees to place it at the right position, we have lower confidence in its position. The lower confidence is likely due to the low SNR in the seisogra, which is approxiately.. Finally, Figure (h) shows the event at 9 = {.22 k,.33 k,.2 s} located well within the contour with a confidence value of.9. This is another exaple of successful identification of a seisic source. Although in this exaple we do not locate all existing icro-earthquakes, we regard this experient as a success because we are getting a good representation of the direction and speed of fracture propagation in a difficult setting characterized by low SNR and sparse data acquisition.

11 Probabilistic icro-seisic iaging 23 Figure 9. Synthetic odel. The dots located at about z = k represent receivers, the other dots represent the icro-seisic events. Figure. Synthetic seisogra. A total of 7 tie steps with an increent of.2 s are calculated.
12 24 R. Xuan & P. Sava (a) (b) (c) (d) (e) (f) (g) (h) Figure. Snapshots of the probability distribution of icro-seisic events. The value of the outer contour is.8, the contour interval is.. The dots represent the locations of icro-earthquakes.
13 Probabilistic icro-seisic iaging 4 CONCLUSION We present a ethod for autoatic icro-earthquake location using Bayesian inversion theory. Our ethod exploits the unique shape of wavefields partially refocused at the source position. This ethod does not require picking of arrival ties but relies on wavefield focusing obtained by tie reversal. Our ethod not only identifies the spatial location of the source, but also specifies the onset tie of the source. Furtherore, since we are using a probabilistic approach to icroearthquake location, our ethod provides confidence aps of icro-earthquake locations which can be used for risk assessent. Synthetic data exaples deonstrate the robustness of the ethod and its applicability to situations when icro-earthquakes occur in close succession in a sall region in space and are recorded in a noisy environent with a SNR as low as.. ACKNOWLEDGMENTS This work was supported by ExxonMobil URC. We are grateful to Mike Payne, Jie Zhang, Rongrong Lu, Alex Martinez, and Anupaa Venkataraan at ExxonMobil URC for access to data, technical discussions and financial support of this project. REFERENCES Born, M., and Wolf, E., 3, Principles of optics: Electroagnetic theory of propagation, interference and diffraction of light:, Cabridge University Press. Duncan, M.,, Is there a future for passive seisic?: First Break, 23,. Gajewski, D.,, Reverse odelling for seisic event characterization: Geophys.F.Int, 63, Gajewski, D., 7, Localization of seisic events by diffraction stacking: SEG Expanded Abstracts, 26, House, L., 987, Locating icroearthquakes induced by hydraulic fracturing in crystalline rock: Geophysical Research Letters, 4, no. 9, Jaynes, E., 3, Probability theory: The logic of science:, Cabridge University Press. Keppler, H., Pearson, C., Potter, R., and Albright, J., 982, Microearthquakes induced during hydraulic fracturing at the Fenton Hill HDR site: the 982 experients: 983 Geotheral Resources Council s annual eeting, pages 9. Lay, T., and Wallace, T., 99, Modern global seisology:, Acadeic Press. Maxwell, S., and Urbancic, T.,, The role of passive icroseisic onitoring in the instruented oil field: The Leading Edge, pages Mosegaard, K., and Tarantola, A., 2, Probabilistic approach to inverse probles:, Acadeic Press. Phillipsa, W., 998, Induced icroearthquake patterns and oil-producing fracture systes in the Austin chalk: Tectonophysics, 289, Pujol, J., 4, Earthquake location tutorial: Graphical approach and approxiate epicentral location techniques: Seisological Research Letters, 7, Rentsch, S., 4, Location of seisicity using gaussian bea type igration: SEG Expanded Abstracts, 23, 4 7. Rentsch, S., 7, Fast location of seisicity:a igration-type approach with application to hydraulic-fracturing data: Geophysics, 72, no., S33 S4. Rutledge, J., and Phillips, W.,, Hydraulic stiulation of natural fractures as revealed by induced icroearthquakes, carthage cotton valley gas field, east texas: Geophysics, pages 37. Shapiro, S., Dinske, C., and Rothert, E., 6, Hydraulic-fracturing controlled dynaics of icroseisic clouds: Geophysical Research Letter, 33, no. 4,. Tarantola, A.,, Inverse Proble Theory and Methods for Model Paraeter Estiation:, Society for Industrial and Applied Matheatics. Thurber, C., and Rabinowitz, N.,, Advances in seisic event location:, Modern Approaches in Geophysics. Zitova, B., and Flusser, J., 3, Iage registration ethods: a survey: Iage and Vision Coputing, 2, APPENDIX A This appendix suarizes the ain eleents of Bayesian inversion theory. Bayesian inversion theory characterizes our state of knowledge in a probabilistic anner through the use of probability density functions (PDFs) linking odel and data paraeters (Jaynes, 3). We can define two states of knowledge. The prior characterizes our knowledge about the odel and data paraeters before any easureents are taken. This inforation is based on our general knowledge of the phenoenon under investigation and on the distribution of odel paraeters and assuptions about reliability of our easureents. The posterior characterizes our knowledge about the odel and data paraeters after easureents are ade and data are processed and interpreted. Both states of knowledge are characterized by PDFs linking odel and data paraeters. Ideally, the easureents help refine the prior into the posterior state of knowledge which provides a tighter connection between odel and data paraeters. In describing Bayesian inversion theory, we need to discuss the fol-
14 26 R. Xuan & P. Sava.. d (a) 4 d (b) 4.. d (c) 4 d (d) (e) Figure A-. (a) A priori probability density function ρ(, d) represented by a delta function corresponding to ρ M () which is also represented by a step function. (b) Theoretical probability density function Θ(, d) representing the physical relationship given by G() and assued to be exact. (c) Conjunction between ρ(, d) and Θ(, d). (d) A posteriori probability density function σ(, d) indicating that the solution to the Bayesian inversion proble is given by a single odel. (e) A coparison between the arginal probabilities showing ρ M () in the upper panel and σ M () in the lower panel.
15 Probabilistic icro-seisic iaging 27 lowing eleents: odel () and odel space, data (d) and data space, the prior state of knowledge (a priori PDF ρ(, d)), the theoretical relations between odel and data (theoretical PDF Θ(, d)), and the posterior state of knowledge (a posteriori PDF σ(, d)). 6. Model and data spaces The odel space (M) is coposed of a set of individual odels which can be denoted by i (i {, 2,..., N}). The odel space represents all the odels that can possibly characterize the physical phenoenon under investigation. The data space D is coposed of all instruental responses to the investigated odels which can be denoted by d i (i {, 2,..., M}). The data space represents all data that can possibly be recorded and characterize the physical phenoenon under investigation A priori probability density ρ(, d) We describe ρ(, d) by a joint PDF over the odel and data spaces. This prior inforation is independent of any easureent. Furtherore, in the special case when the prior inforation on the odel space ρ M () is independent of the prior inforation on the data space ρ D (d), the a priori probability density function ρ(, d) is (Tarantola, ) ρ(, d) = ρ D (d)ρ M (), (A-) where ρ D (d) describes the easureent uncertainty of the observed data, and ρ M () illustrates our confidence in the chosen odel paraeters. Two exaples of a priori probability density functions are shown in Figures (a) and 2(a). The vertical axis represents the value of the probability that a particular odel characterizes the physical syste under investigation. In Figure (a), ρ(, d) = ρ M ()δ(d D obs ), where D obs denote the observed data, and the a priori probability in the odel space is a step function. In this case, no error is associated with the observed data. In Figure 2(a), ρ(, d) = ρ M ()e (d D obs ) 2 2C d, where ρ M () is a tapered step function, and C d is the easureent uncertainty of the data. We assue that the data are distributed following a Gaussian distribution Hoogeneous probability density µ(, d) In order to reove the effect of the discretization of the odel and data paraeters, we define a hoogeneous PDF µ(, d) whose role is to balance the discrete odel and data spaces. By definition, the hoogeneous probability distribution states that a probability assigned to each region of the space is proportional to the volue of the region (Mosegaard & Tarantola, 2). In the special case when the hoogeneous probability densities on the odel and data spaces are independent, µ(, d) is expressed as µ(, d) = µ D (d)µ M (), (A-2) where µ M () is the hoogeneous probability density on the odel space and µ D (d) is the hoogeneous probability density on the data space. For exaple, in spherical coordinates, the volue of a standard region is dv (r, θ, ϕ) = r 2 sin θdrdθdϕ. The hoogeneous probability distribution is µ = kr 2 sin θ, where k is an arbitrary constant. For 3-D Cartesian coordinates, dv (x, y, z) = dxdydz and µ is a constant Theoretical probability density Θ(, d) The theoretical probability density Θ(, d) describes the correlations between the odel and data paraeters. The defined relationship corresponds to a physical law and ay incorporate uncertainties associated with theory, for exaple due to assuptions or siplifications of the physical law or due to iperfect knowledge of the physical paraeters underlying it. The theoretical probability density Θ(, d) can be expressed as Θ(, d) = θ(d )µ M (), (A-3) where θ(d ) describes the probability distribution of data for the given kernel function and odel, and µ M () is the arginal probability defined in the preceding section. In Figure (b), θ(d ) = δ(d G()), where G() is the kernel function which describes the physical relationship between d and. No error is associated with this kernel function. In Figure 2(b), 2 θ(d ) = e (d G()) 2C t, where C t describes the theory uncertainty. The error associated with this kernel function follows a Gaussian distribution. 6. A posteriori probability density σ(, d) The conjunction between the a priori state of inforation ρ(, d) and the theoretical probability density function Θ(, d), which describes the theoretical relationship between odel and data, provides the a posteriori state of inforation σ(, d): σ(, d) = k ρ(, d)θ(, d), (A-4) µ(, d) where k is a noralization constant that serves the purpose of keeping the area under the graph of σ(, d) constant. The expression for k is k = RX, (A-) dxρ(, d)θ(, d)/µ(, d) where X = (D, M) is the joint space of the data and the odel. The posterior inforation σ(, d) is coputed
16 28 R. Xuan & P. Sava.. d (a) 4 4 d (b) d (c) 4 4 d (d) (e) Figure A-2. (a) A priori probability density function ρ(, d) represented by a Gaussian function corresponding to ρ M () represented by a tapered step function. (b) Theoretical probability density function Θ(, d) representing the physical relationship given by G() and assued to be uncertain. (c) Conjunction between ρ(, d) and Θ(, d). (d) A posteriori probability density function σ(, d) indicating that the solution to the Bayesian inversion proble is given by several odels corresponding to the uncertainties of the prior and theoretical probability density functions. (e) A coparison between the arginal probabilities showing ρ M () in the upper panel and σ M () in the lower panel.
17 Probabilistic icro-seisic iaging 29 based on observations. In the special case when both the odel space and the data space are described in Cartesian coordinates, the posterior inforation is proportional to the conjunction between the prior inforation and the theoretical inforation: σ(, d) ρ(, d)θ(, d). (A-6) Figures (c) and 2(c) show the conjunction between the ρ(, d) and Θ(, d). In Figure (c), σ(, d) δ(d obs G()) which is shown in Figure (d). Figure 2(c) gives the conjunction between the PDFs shown in Figures 2(a) and 2(b). Its physical eaning is that the observed data are exactly the sae as the data calculated fro the kernel function. In Figure 2(c), σ(, d) e (Dobs G()) 2 2C, where C = C d + C t. Figure 2(d) shows σ(, d). The probability distribution in Figure 2(d) shows how well the data calculated fro the kernel function explain the observed data. and when Θ(, d) is given in equation A-8, with ρ(, d) = ρ D (d)ρ M () and µ(, d) = µ D (d)µ M (), we can write Z σ M () = kρ M () D ρ D (d)δ(d G()) dd, (A-) µ D (d) where ρ D (d) is a function of d and the observed data, and µ D (d) is a constant for data discretized in Cartesian coordinates. Thus, equation A-7 for an ideal kernel function can be written as where σ M () = νρ M ()ρ D(G(), D obs ), Z ν = M ρ M ()ρ D(d, D obs )d (A-) (A-2) is a constant. In equation A-, σ M () is proportional to the product of the prior probabilities on the odel and data spaces The arginal probability density σ M () In order to provide a solution to the inversion proble, we have to transfer the inforation provided by σ(, d) to the odel space. We obtain the arginal probability density in the odel space σ M () by projecting σ(, d) onto the odel space: Z σ M () = σ(, d)dd. (A-7) D The probability density function provided by σ M () indicates what odels satisfy at the sae tie our prior knowledge on the distribution of odel paraeters, the theoretical relationships between odel and data and the easureent uncertainties. A coparison between ρ M () and σ M () is shown in Figures (e) and 2(e). The distribution on σ M () is narrower on the posterior relative to the prior indicating the tighter connection introduced by the recorded data Negligible theoretical uncertainties When we assue that no uncertainty is associated with the kernel function G() which describes the physical relationship between the data and the odel, the theoretical probability density Θ(, d) can be expressed as Θ(, d) = δ(d G())µ M (), (A-8) where µ M () is a constant for odels paraeterized in Cartesian coordinates. The theoretical probability density Θ(, d) = when the data equal the value calculated fro the kernel function and zero otherwise. In this case, the arginal probability in the odel space in equation A-7 can be expressed as Z Z ρ(, d)θ(, d) σ M () = σ(, d)dd = k dd, D D µ(, d) (A-9)
18 2 R. Xuan & P. Sava
Probabilistic micro-earthquake location for reservoir monitoring Ran Xuan and Paul Sava, Center for Wave Phenomena, Colorado School of Mines
 Probabilistic icro-earthquake location for reservoir onitoring Ran Xuan an Paul Sava, Center for Wave Phenoena, Colorao School of Mines SUMMARY Micro-earthquake sources an onset ties are ientifie within
Probabilistic icro-earthquake location for reservoir onitoring Ran Xuan an Paul Sava, Center for Wave Phenoena, Colorao School of Mines SUMMARY Micro-earthquake sources an onset ties are ientifie within
Data-Driven Imaging in Anisotropic Media
 18 th World Conference on Non destructive Testing, 16- April 1, Durban, South Africa Data-Driven Iaging in Anisotropic Media Arno VOLKER 1 and Alan HUNTER 1 TNO Stieltjesweg 1, 6 AD, Delft, The Netherlands
18 th World Conference on Non destructive Testing, 16- April 1, Durban, South Africa Data-Driven Iaging in Anisotropic Media Arno VOLKER 1 and Alan HUNTER 1 TNO Stieltjesweg 1, 6 AD, Delft, The Netherlands
3D acoustic wave modeling with a time-space domain dispersion-relation-based Finite-difference scheme
 P-8 3D acoustic wave odeling with a tie-space doain dispersion-relation-based Finite-difference schee Yang Liu * and rinal K. Sen State Key Laboratory of Petroleu Resource and Prospecting (China University
P-8 3D acoustic wave odeling with a tie-space doain dispersion-relation-based Finite-difference schee Yang Liu * and rinal K. Sen State Key Laboratory of Petroleu Resource and Prospecting (China University
P032 3D Seismic Diffraction Modeling in Multilayered Media in Terms of Surface Integrals
 P032 3D Seisic Diffraction Modeling in Multilayered Media in Ters of Surface Integrals A.M. Aizenberg (Institute of Geophysics SB RAS, M. Ayzenberg* (Norwegian University of Science & Technology, H.B.
P032 3D Seisic Diffraction Modeling in Multilayered Media in Ters of Surface Integrals A.M. Aizenberg (Institute of Geophysics SB RAS, M. Ayzenberg* (Norwegian University of Science & Technology, H.B.
Non-Parametric Non-Line-of-Sight Identification 1
 Non-Paraetric Non-Line-of-Sight Identification Sinan Gezici, Hisashi Kobayashi and H. Vincent Poor Departent of Electrical Engineering School of Engineering and Applied Science Princeton University, Princeton,
Non-Paraetric Non-Line-of-Sight Identification Sinan Gezici, Hisashi Kobayashi and H. Vincent Poor Departent of Electrical Engineering School of Engineering and Applied Science Princeton University, Princeton,
Proc. of the IEEE/OES Seventh Working Conference on Current Measurement Technology UNCERTAINTIES IN SEASONDE CURRENT VELOCITIES
 Proc. of the IEEE/OES Seventh Working Conference on Current Measureent Technology UNCERTAINTIES IN SEASONDE CURRENT VELOCITIES Belinda Lipa Codar Ocean Sensors 15 La Sandra Way, Portola Valley, CA 98 blipa@pogo.co
Proc. of the IEEE/OES Seventh Working Conference on Current Measureent Technology UNCERTAINTIES IN SEASONDE CURRENT VELOCITIES Belinda Lipa Codar Ocean Sensors 15 La Sandra Way, Portola Valley, CA 98 blipa@pogo.co
Figure 1: Equivalent electric (RC) circuit of a neurons membrane
 circuit of a neurons membrane") Exercise: Leaky integrate and fire odel of neural spike generation This exercise investigates a siplified odel of how neurons spike in response to current inputs, one of the ost fundaental properties of
Exercise: Leaky integrate and fire odel of neural spike generation This exercise investigates a siplified odel of how neurons spike in response to current inputs, one of the ost fundaental properties of
Intelligent Systems: Reasoning and Recognition. Perceptrons and Support Vector Machines
 Intelligent Systes: Reasoning and Recognition Jaes L. Crowley osig 1 Winter Seester 2018 Lesson 6 27 February 2018 Outline Perceptrons and Support Vector achines Notation...2 Linear odels...3 Lines, Planes
Intelligent Systes: Reasoning and Recognition Jaes L. Crowley osig 1 Winter Seester 2018 Lesson 6 27 February 2018 Outline Perceptrons and Support Vector achines Notation...2 Linear odels...3 Lines, Planes
Inspection; structural health monitoring; reliability; Bayesian analysis; updating; decision analysis; value of information
 Cite as: Straub D. (2014). Value of inforation analysis with structural reliability ethods. Structural Safety, 49: 75-86. Value of Inforation Analysis with Structural Reliability Methods Daniel Straub
Cite as: Straub D. (2014). Value of inforation analysis with structural reliability ethods. Structural Safety, 49: 75-86. Value of Inforation Analysis with Structural Reliability Methods Daniel Straub
Block designs and statistics
 Bloc designs and statistics Notes for Math 447 May 3, 2011 The ain paraeters of a bloc design are nuber of varieties v, bloc size, nuber of blocs b. A design is built on a set of v eleents. Each eleent
Bloc designs and statistics Notes for Math 447 May 3, 2011 The ain paraeters of a bloc design are nuber of varieties v, bloc size, nuber of blocs b. A design is built on a set of v eleents. Each eleent
Tracking using CONDENSATION: Conditional Density Propagation
 Tracking using CONDENSATION: Conditional Density Propagation Goal Model-based visual tracking in dense clutter at near video frae rates M. Isard and A. Blake, CONDENSATION Conditional density propagation
Tracking using CONDENSATION: Conditional Density Propagation Goal Model-based visual tracking in dense clutter at near video frae rates M. Isard and A. Blake, CONDENSATION Conditional density propagation
Kernel Methods and Support Vector Machines
 Intelligent Systes: Reasoning and Recognition Jaes L. Crowley ENSIAG 2 / osig 1 Second Seester 2012/2013 Lesson 20 2 ay 2013 Kernel ethods and Support Vector achines Contents Kernel Functions...2 Quadratic
Intelligent Systes: Reasoning and Recognition Jaes L. Crowley ENSIAG 2 / osig 1 Second Seester 2012/2013 Lesson 20 2 ay 2013 Kernel ethods and Support Vector achines Contents Kernel Functions...2 Quadratic
HIGH RESOLUTION NEAR-FIELD MULTIPLE TARGET DETECTION AND LOCALIZATION USING SUPPORT VECTOR MACHINES
 ICONIC 2007 St. Louis, O, USA June 27-29, 2007 HIGH RESOLUTION NEAR-FIELD ULTIPLE TARGET DETECTION AND LOCALIZATION USING SUPPORT VECTOR ACHINES A. Randazzo,. A. Abou-Khousa 2,.Pastorino, and R. Zoughi
ICONIC 2007 St. Louis, O, USA June 27-29, 2007 HIGH RESOLUTION NEAR-FIELD ULTIPLE TARGET DETECTION AND LOCALIZATION USING SUPPORT VECTOR ACHINES A. Randazzo,. A. Abou-Khousa 2,.Pastorino, and R. Zoughi
Optimal nonlinear Bayesian experimental design: an application to amplitude versus offset experiments
 Geophys. J. Int. (23) 155, 411 421 Optial nonlinear Bayesian experiental design: an application to aplitude versus offset experients Jojanneke van den Berg, 1, Andrew Curtis 2,3 and Jeannot Trapert 1 1
Geophys. J. Int. (23) 155, 411 421 Optial nonlinear Bayesian experiental design: an application to aplitude versus offset experients Jojanneke van den Berg, 1, Andrew Curtis 2,3 and Jeannot Trapert 1 1
Probability Distributions
 Probability Distributions In Chapter, we ephasized the central role played by probability theory in the solution of pattern recognition probles. We turn now to an exploration of soe particular exaples
Probability Distributions In Chapter, we ephasized the central role played by probability theory in the solution of pattern recognition probles. We turn now to an exploration of soe particular exaples
Fluid Substitution Model to Generate Synthetic Seismic Attributes: FluidSub.exe
 Fluid Substitution Model to Generate Synthetic Seisic Attributes: FluidSub.exe Sahyun Hong and Clayton V. Deutsch Geostatistical data integration is a ature research field and any of algoriths have been
Fluid Substitution Model to Generate Synthetic Seisic Attributes: FluidSub.exe Sahyun Hong and Clayton V. Deutsch Geostatistical data integration is a ature research field and any of algoriths have been
Using EM To Estimate A Probablity Density With A Mixture Of Gaussians
 Using EM To Estiate A Probablity Density With A Mixture Of Gaussians Aaron A. D Souza adsouza@usc.edu Introduction The proble we are trying to address in this note is siple. Given a set of data points
Using EM To Estiate A Probablity Density With A Mixture Of Gaussians Aaron A. D Souza adsouza@usc.edu Introduction The proble we are trying to address in this note is siple. Given a set of data points
PULSE-TRAIN BASED TIME-DELAY ESTIMATION IMPROVES RESILIENCY TO NOISE
 PULSE-TRAIN BASED TIME-DELAY ESTIMATION IMPROVES RESILIENCY TO NOISE 1 Nicola Neretti, 1 Nathan Intrator and 1,2 Leon N Cooper 1 Institute for Brain and Neural Systes, Brown University, Providence RI 02912.
PULSE-TRAIN BASED TIME-DELAY ESTIMATION IMPROVES RESILIENCY TO NOISE 1 Nicola Neretti, 1 Nathan Intrator and 1,2 Leon N Cooper 1 Institute for Brain and Neural Systes, Brown University, Providence RI 02912.
Bayesian Approach for Fatigue Life Prediction from Field Inspection
 Bayesian Approach for Fatigue Life Prediction fro Field Inspection Dawn An and Jooho Choi School of Aerospace & Mechanical Engineering, Korea Aerospace University, Goyang, Seoul, Korea Srira Pattabhiraan
Bayesian Approach for Fatigue Life Prediction fro Field Inspection Dawn An and Jooho Choi School of Aerospace & Mechanical Engineering, Korea Aerospace University, Goyang, Seoul, Korea Srira Pattabhiraan
are equal to zero, where, q = p 1. For each gene j, the pairwise null and alternative hypotheses are,
 Page of 8 Suppleentary Materials: A ultiple testing procedure for ulti-diensional pairwise coparisons with application to gene expression studies Anjana Grandhi, Wenge Guo, Shyaal D. Peddada S Notations
Page of 8 Suppleentary Materials: A ultiple testing procedure for ulti-diensional pairwise coparisons with application to gene expression studies Anjana Grandhi, Wenge Guo, Shyaal D. Peddada S Notations
Spine Fin Efficiency A Three Sided Pyramidal Fin of Equilateral Triangular Cross-Sectional Area
 Proceedings of the 006 WSEAS/IASME International Conference on Heat and Mass Transfer, Miai, Florida, USA, January 18-0, 006 (pp13-18) Spine Fin Efficiency A Three Sided Pyraidal Fin of Equilateral Triangular
Proceedings of the 006 WSEAS/IASME International Conference on Heat and Mass Transfer, Miai, Florida, USA, January 18-0, 006 (pp13-18) Spine Fin Efficiency A Three Sided Pyraidal Fin of Equilateral Triangular
A Simple Regression Problem
 A Siple Regression Proble R. M. Castro March 23, 2 In this brief note a siple regression proble will be introduced, illustrating clearly the bias-variance tradeoff. Let Y i f(x i ) + W i, i,..., n, where
A Siple Regression Proble R. M. Castro March 23, 2 In this brief note a siple regression proble will be introduced, illustrating clearly the bias-variance tradeoff. Let Y i f(x i ) + W i, i,..., n, where
CS Lecture 13. More Maximum Likelihood
 CS 6347 Lecture 13 More Maxiu Likelihood Recap Last tie: Introduction to axiu likelihood estiation MLE for Bayesian networks Optial CPTs correspond to epirical counts Today: MLE for CRFs 2 Maxiu Likelihood
CS 6347 Lecture 13 More Maxiu Likelihood Recap Last tie: Introduction to axiu likelihood estiation MLE for Bayesian networks Optial CPTs correspond to epirical counts Today: MLE for CRFs 2 Maxiu Likelihood
Using a De-Convolution Window for Operating Modal Analysis
 Using a De-Convolution Window for Operating Modal Analysis Brian Schwarz Vibrant Technology, Inc. Scotts Valley, CA Mark Richardson Vibrant Technology, Inc. Scotts Valley, CA Abstract Operating Modal Analysis
Using a De-Convolution Window for Operating Modal Analysis Brian Schwarz Vibrant Technology, Inc. Scotts Valley, CA Mark Richardson Vibrant Technology, Inc. Scotts Valley, CA Abstract Operating Modal Analysis
Q ESTIMATION WITHIN A FORMATION PROGRAM q_estimation
 Foration Attributes Progra q_estiation Q ESTIMATION WITHIN A FOMATION POGAM q_estiation Estiating Q between stratal slices Progra q_estiation estiate seisic attenuation (1/Q) on coplex stratal slices using
Foration Attributes Progra q_estiation Q ESTIMATION WITHIN A FOMATION POGAM q_estiation Estiating Q between stratal slices Progra q_estiation estiate seisic attenuation (1/Q) on coplex stratal slices using
General Properties of Radiation Detectors Supplements
 Phys. 649: Nuclear Techniques Physics Departent Yarouk University Chapter 4: General Properties of Radiation Detectors Suppleents Dr. Nidal M. Ershaidat Overview Phys. 649: Nuclear Techniques Physics Departent
Phys. 649: Nuclear Techniques Physics Departent Yarouk University Chapter 4: General Properties of Radiation Detectors Suppleents Dr. Nidal M. Ershaidat Overview Phys. 649: Nuclear Techniques Physics Departent
TEST OF HOMOGENEITY OF PARALLEL SAMPLES FROM LOGNORMAL POPULATIONS WITH UNEQUAL VARIANCES
 TEST OF HOMOGENEITY OF PARALLEL SAMPLES FROM LOGNORMAL POPULATIONS WITH UNEQUAL VARIANCES S. E. Ahed, R. J. Tokins and A. I. Volodin Departent of Matheatics and Statistics University of Regina Regina,
TEST OF HOMOGENEITY OF PARALLEL SAMPLES FROM LOGNORMAL POPULATIONS WITH UNEQUAL VARIANCES S. E. Ahed, R. J. Tokins and A. I. Volodin Departent of Matheatics and Statistics University of Regina Regina,
Kinetic Theory of Gases: Elementary Ideas
 Kinetic Theory of Gases: Eleentary Ideas 17th February 2010 1 Kinetic Theory: A Discussion Based on a Siplified iew of the Motion of Gases 1.1 Pressure: Consul Engel and Reid Ch. 33.1) for a discussion
Kinetic Theory of Gases: Eleentary Ideas 17th February 2010 1 Kinetic Theory: A Discussion Based on a Siplified iew of the Motion of Gases 1.1 Pressure: Consul Engel and Reid Ch. 33.1) for a discussion
Chapter 6 1-D Continuous Groups
 Chapter 6 1-D Continuous Groups Continuous groups consist of group eleents labelled by one or ore continuous variables, say a 1, a 2,, a r, where each variable has a well- defined range. This chapter explores:
Chapter 6 1-D Continuous Groups Continuous groups consist of group eleents labelled by one or ore continuous variables, say a 1, a 2,, a r, where each variable has a well- defined range. This chapter explores:
A note on the multiplication of sparse matrices
 Cent. Eur. J. Cop. Sci. 41) 2014 1-11 DOI: 10.2478/s13537-014-0201-x Central European Journal of Coputer Science A note on the ultiplication of sparse atrices Research Article Keivan Borna 12, Sohrab Aboozarkhani
Cent. Eur. J. Cop. Sci. 41) 2014 1-11 DOI: 10.2478/s13537-014-0201-x Central European Journal of Coputer Science A note on the ultiplication of sparse atrices Research Article Keivan Borna 12, Sohrab Aboozarkhani
Experimental Design For Model Discrimination And Precise Parameter Estimation In WDS Analysis
 City University of New York (CUNY) CUNY Acadeic Works International Conference on Hydroinforatics 8-1-2014 Experiental Design For Model Discriination And Precise Paraeter Estiation In WDS Analysis Giovanna
City University of New York (CUNY) CUNY Acadeic Works International Conference on Hydroinforatics 8-1-2014 Experiental Design For Model Discriination And Precise Paraeter Estiation In WDS Analysis Giovanna
e-companion ONLY AVAILABLE IN ELECTRONIC FORM
 OPERATIONS RESEARCH doi 10.1287/opre.1070.0427ec pp. ec1 ec5 e-copanion ONLY AVAILABLE IN ELECTRONIC FORM infors 07 INFORMS Electronic Copanion A Learning Approach for Interactive Marketing to a Custoer
OPERATIONS RESEARCH doi 10.1287/opre.1070.0427ec pp. ec1 ec5 e-copanion ONLY AVAILABLE IN ELECTRONIC FORM infors 07 INFORMS Electronic Copanion A Learning Approach for Interactive Marketing to a Custoer
An Approximate Model for the Theoretical Prediction of the Velocity Increase in the Intermediate Ballistics Period
 An Approxiate Model for the Theoretical Prediction of the Velocity... 77 Central European Journal of Energetic Materials, 205, 2(), 77-88 ISSN 2353-843 An Approxiate Model for the Theoretical Prediction
An Approxiate Model for the Theoretical Prediction of the Velocity... 77 Central European Journal of Energetic Materials, 205, 2(), 77-88 ISSN 2353-843 An Approxiate Model for the Theoretical Prediction
Kinetic Theory of Gases: Elementary Ideas
 Kinetic Theory of Gases: Eleentary Ideas 9th February 011 1 Kinetic Theory: A Discussion Based on a Siplified iew of the Motion of Gases 1.1 Pressure: Consul Engel and Reid Ch. 33.1) for a discussion of
Kinetic Theory of Gases: Eleentary Ideas 9th February 011 1 Kinetic Theory: A Discussion Based on a Siplified iew of the Motion of Gases 1.1 Pressure: Consul Engel and Reid Ch. 33.1) for a discussion of
Supplementary Information for Design of Bending Multi-Layer Electroactive Polymer Actuators
 Suppleentary Inforation for Design of Bending Multi-Layer Electroactive Polyer Actuators Bavani Balakrisnan, Alek Nacev, and Elisabeth Sela University of Maryland, College Park, Maryland 074 1 Analytical
Suppleentary Inforation for Design of Bending Multi-Layer Electroactive Polyer Actuators Bavani Balakrisnan, Alek Nacev, and Elisabeth Sela University of Maryland, College Park, Maryland 074 1 Analytical
1 Bounding the Margin
 COS 511: Theoretical Machine Learning Lecturer: Rob Schapire Lecture #12 Scribe: Jian Min Si March 14, 2013 1 Bounding the Margin We are continuing the proof of a bound on the generalization error of AdaBoost
COS 511: Theoretical Machine Learning Lecturer: Rob Schapire Lecture #12 Scribe: Jian Min Si March 14, 2013 1 Bounding the Margin We are continuing the proof of a bound on the generalization error of AdaBoost
INTRODUCTION. Residual migration has proved to be a useful tool in imaging and in velocity analysis.
 Stanford Exploration Project, Report, June 3, 999, pages 5 59 Short Note On Stolt prestack residual igration Paul Sava keywords: Stolt, residual igration INTRODUCTION Residual igration has proved to be
Stanford Exploration Project, Report, June 3, 999, pages 5 59 Short Note On Stolt prestack residual igration Paul Sava keywords: Stolt, residual igration INTRODUCTION Residual igration has proved to be
Detection and Estimation Theory
 ESE 54 Detection and Estiation Theory Joseph A. O Sullivan Sauel C. Sachs Professor Electronic Systes and Signals Research Laboratory Electrical and Systes Engineering Washington University 11 Urbauer
ESE 54 Detection and Estiation Theory Joseph A. O Sullivan Sauel C. Sachs Professor Electronic Systes and Signals Research Laboratory Electrical and Systes Engineering Washington University 11 Urbauer
Statistical Logic Cell Delay Analysis Using a Current-based Model
 Statistical Logic Cell Delay Analysis Using a Current-based Model Hanif Fatei Shahin Nazarian Massoud Pedra Dept. of EE-Systes, University of Southern California, Los Angeles, CA 90089 {fatei, shahin,
Statistical Logic Cell Delay Analysis Using a Current-based Model Hanif Fatei Shahin Nazarian Massoud Pedra Dept. of EE-Systes, University of Southern California, Los Angeles, CA 90089 {fatei, shahin,
REDUCTION OF FINITE ELEMENT MODELS BY PARAMETER IDENTIFICATION
 ISSN 139 14X INFORMATION TECHNOLOGY AND CONTROL, 008, Vol.37, No.3 REDUCTION OF FINITE ELEMENT MODELS BY PARAMETER IDENTIFICATION Riantas Barauskas, Vidantas Riavičius Departent of Syste Analysis, Kaunas
ISSN 139 14X INFORMATION TECHNOLOGY AND CONTROL, 008, Vol.37, No.3 REDUCTION OF FINITE ELEMENT MODELS BY PARAMETER IDENTIFICATION Riantas Barauskas, Vidantas Riavičius Departent of Syste Analysis, Kaunas
Pattern Recognition and Machine Learning. Artificial Neural networks
 Pattern Recognition and Machine Learning Jaes L. Crowley ENSIMAG 3 - MMIS Fall Seester 2016/2017 Lessons 9 11 Jan 2017 Outline Artificial Neural networks Notation...2 Convolutional Neural Networks...3
Pattern Recognition and Machine Learning Jaes L. Crowley ENSIMAG 3 - MMIS Fall Seester 2016/2017 Lessons 9 11 Jan 2017 Outline Artificial Neural networks Notation...2 Convolutional Neural Networks...3
AVOIDING PITFALLS IN MEASUREMENT UNCERTAINTY ANALYSIS
 VOIDING ITFLLS IN ESREENT NERTINTY NLYSIS Benny R. Sith Inchwor Solutions Santa Rosa, Suary: itfalls, both subtle and obvious, await the new or casual practitioner of easureent uncertainty analysis. This
VOIDING ITFLLS IN ESREENT NERTINTY NLYSIS Benny R. Sith Inchwor Solutions Santa Rosa, Suary: itfalls, both subtle and obvious, await the new or casual practitioner of easureent uncertainty analysis. This
An Improved Particle Filter with Applications in Ballistic Target Tracking
 Sensors & ransducers Vol. 72 Issue 6 June 204 pp. 96-20 Sensors & ransducers 204 by IFSA Publishing S. L. http://www.sensorsportal.co An Iproved Particle Filter with Applications in Ballistic arget racing
Sensors & ransducers Vol. 72 Issue 6 June 204 pp. 96-20 Sensors & ransducers 204 by IFSA Publishing S. L. http://www.sensorsportal.co An Iproved Particle Filter with Applications in Ballistic arget racing
SEISMIC FRAGILITY ANALYSIS
 9 th ASCE Specialty Conference on Probabilistic Mechanics and Structural Reliability PMC24 SEISMIC FRAGILITY ANALYSIS C. Kafali, Student M. ASCE Cornell University, Ithaca, NY 483 ck22@cornell.edu M. Grigoriu,
9 th ASCE Specialty Conference on Probabilistic Mechanics and Structural Reliability PMC24 SEISMIC FRAGILITY ANALYSIS C. Kafali, Student M. ASCE Cornell University, Ithaca, NY 483 ck22@cornell.edu M. Grigoriu,
Recovering Data from Underdetermined Quadratic Measurements (CS 229a Project: Final Writeup)
") Recovering Data fro Underdeterined Quadratic Measureents (CS 229a Project: Final Writeup) Mahdi Soltanolkotabi Deceber 16, 2011 1 Introduction Data that arises fro engineering applications often contains
Recovering Data fro Underdeterined Quadratic Measureents (CS 229a Project: Final Writeup) Mahdi Soltanolkotabi Deceber 16, 2011 1 Introduction Data that arises fro engineering applications often contains
Ph 20.3 Numerical Solution of Ordinary Differential Equations
 Ph 20.3 Nuerical Solution of Ordinary Differential Equations Due: Week 5 -v20170314- This Assignent So far, your assignents have tried to failiarize you with the hardware and software in the Physics Coputing
Ph 20.3 Nuerical Solution of Ordinary Differential Equations Due: Week 5 -v20170314- This Assignent So far, your assignents have tried to failiarize you with the hardware and software in the Physics Coputing
Sampling How Big a Sample?
 C. G. G. Aitken, 1 Ph.D. Sapling How Big a Saple? REFERENCE: Aitken CGG. Sapling how big a saple? J Forensic Sci 1999;44(4):750 760. ABSTRACT: It is thought that, in a consignent of discrete units, a certain
C. G. G. Aitken, 1 Ph.D. Sapling How Big a Saple? REFERENCE: Aitken CGG. Sapling how big a saple? J Forensic Sci 1999;44(4):750 760. ABSTRACT: It is thought that, in a consignent of discrete units, a certain
UNIVERSITY OF TRENTO ON THE USE OF SVM FOR ELECTROMAGNETIC SUBSURFACE SENSING. A. Boni, M. Conci, A. Massa, and S. Piffer.
 UIVRSITY OF TRTO DIPARTITO DI IGGRIA SCIZA DLL IFORAZIO 3823 Povo Trento (Italy) Via Soarive 4 http://www.disi.unitn.it O TH US OF SV FOR LCTROAGTIC SUBSURFAC SSIG A. Boni. Conci A. assa and S. Piffer
UIVRSITY OF TRTO DIPARTITO DI IGGRIA SCIZA DLL IFORAZIO 3823 Povo Trento (Italy) Via Soarive 4 http://www.disi.unitn.it O TH US OF SV FOR LCTROAGTIC SUBSURFAC SSIG A. Boni. Conci A. assa and S. Piffer
Time-of-flight Identification of Ions in CESR and ERL
 Tie-of-flight Identification of Ions in CESR and ERL Eric Edwards Departent of Physics, University of Alabaa, Tuscaloosa, AL, 35486 (Dated: August 8, 2008) The accuulation of ion densities in the bea pipe
Tie-of-flight Identification of Ions in CESR and ERL Eric Edwards Departent of Physics, University of Alabaa, Tuscaloosa, AL, 35486 (Dated: August 8, 2008) The accuulation of ion densities in the bea pipe
Monitoring and system identification of suspension bridges: An alternative approach
 Monitoring and syste identification of suspension bridges: An alternative approach Erdal Şafak Boğaziçi University, Kandilli Observatory and Earthquake Reseach Institute, Istanbul, Turkey Abstract This
Monitoring and syste identification of suspension bridges: An alternative approach Erdal Şafak Boğaziçi University, Kandilli Observatory and Earthquake Reseach Institute, Istanbul, Turkey Abstract This
Biostatistics Department Technical Report
 Biostatistics Departent Technical Report BST006-00 Estiation of Prevalence by Pool Screening With Equal Sized Pools and a egative Binoial Sapling Model Charles R. Katholi, Ph.D. Eeritus Professor Departent
Biostatistics Departent Technical Report BST006-00 Estiation of Prevalence by Pool Screening With Equal Sized Pools and a egative Binoial Sapling Model Charles R. Katholi, Ph.D. Eeritus Professor Departent
Pattern Recognition and Machine Learning. Artificial Neural networks
 Pattern Recognition and Machine Learning Jaes L. Crowley ENSIMAG 3 - MMIS Fall Seester 2017 Lessons 7 20 Dec 2017 Outline Artificial Neural networks Notation...2 Introduction...3 Key Equations... 3 Artificial
Pattern Recognition and Machine Learning Jaes L. Crowley ENSIMAG 3 - MMIS Fall Seester 2017 Lessons 7 20 Dec 2017 Outline Artificial Neural networks Notation...2 Introduction...3 Key Equations... 3 Artificial
Reduction of Uncertainty in Post-Event Seismic Loss Estimates Using Observation Data and Bayesian Updating
 Reduction of Uncertainty in Post-Event Seisic Loss Estiates Using Observation Data and Bayesian Updating Maura Torres Subitted in partial fulfillent of the requireents for the degree of Doctor of Philosophy
Reduction of Uncertainty in Post-Event Seisic Loss Estiates Using Observation Data and Bayesian Updating Maura Torres Subitted in partial fulfillent of the requireents for the degree of Doctor of Philosophy
In this chapter we will start the discussion on wave phenomena. We will study the following topics:
 Chapter 16 Waves I In this chapter we will start the discussion on wave phenoena. We will study the following topics: Types of waves Aplitude, phase, frequency, period, propagation speed of a wave Mechanical
Chapter 16 Waves I In this chapter we will start the discussion on wave phenoena. We will study the following topics: Types of waves Aplitude, phase, frequency, period, propagation speed of a wave Mechanical
Paul M. Goggans Department of Electrical Engineering, University of Mississippi, Anderson Hall, University, Mississippi 38677
 Evaluation of decay ties in coupled spaces: Bayesian decay odel selection a),b) Ning Xiang c) National Center for Physical Acoustics and Departent of Electrical Engineering, University of Mississippi,
Evaluation of decay ties in coupled spaces: Bayesian decay odel selection a),b) Ning Xiang c) National Center for Physical Acoustics and Departent of Electrical Engineering, University of Mississippi,
Analysis of Impulsive Natural Phenomena through Finite Difference Methods A MATLAB Computational Project-Based Learning
 Analysis of Ipulsive Natural Phenoena through Finite Difference Methods A MATLAB Coputational Project-Based Learning Nicholas Kuia, Christopher Chariah, Mechatronics Engineering, Vaughn College of Aeronautics
Analysis of Ipulsive Natural Phenoena through Finite Difference Methods A MATLAB Coputational Project-Based Learning Nicholas Kuia, Christopher Chariah, Mechatronics Engineering, Vaughn College of Aeronautics
Analysis of ground vibration transmission in high precision equipment by Frequency Based Substructuring
 Analysis of ground vibration transission in high precision equipent by Frequency Based Substructuring G. van Schothorst 1, M.A. Boogaard 2, G.W. van der Poel 1, D.J. Rixen 2 1 Philips Innovation Services,
Analysis of ground vibration transission in high precision equipent by Frequency Based Substructuring G. van Schothorst 1, M.A. Boogaard 2, G.W. van der Poel 1, D.J. Rixen 2 1 Philips Innovation Services,
2 Q 10. Likewise, in case of multiple particles, the corresponding density in 2 must be averaged over all
 Lecture 6 Introduction to kinetic theory of plasa waves Introduction to kinetic theory So far we have been odeling plasa dynaics using fluid equations. The assuption has been that the pressure can be either
Lecture 6 Introduction to kinetic theory of plasa waves Introduction to kinetic theory So far we have been odeling plasa dynaics using fluid equations. The assuption has been that the pressure can be either
Support Vector Machine Classification of Uncertain and Imbalanced data using Robust Optimization
 Recent Researches in Coputer Science Support Vector Machine Classification of Uncertain and Ibalanced data using Robust Optiization RAGHAV PAT, THEODORE B. TRAFALIS, KASH BARKER School of Industrial Engineering
Recent Researches in Coputer Science Support Vector Machine Classification of Uncertain and Ibalanced data using Robust Optiization RAGHAV PAT, THEODORE B. TRAFALIS, KASH BARKER School of Industrial Engineering
Effective joint probabilistic data association using maximum a posteriori estimates of target states
 Effective joint probabilistic data association using axiu a posteriori estiates of target states 1 Viji Paul Panakkal, 2 Rajbabu Velurugan 1 Central Research Laboratory, Bharat Electronics Ltd., Bangalore,
Effective joint probabilistic data association using axiu a posteriori estiates of target states 1 Viji Paul Panakkal, 2 Rajbabu Velurugan 1 Central Research Laboratory, Bharat Electronics Ltd., Bangalore,
Polygonal Designs: Existence and Construction
 Polygonal Designs: Existence and Construction John Hegean Departent of Matheatics, Stanford University, Stanford, CA 9405 Jeff Langford Departent of Matheatics, Drake University, Des Moines, IA 5011 G
Polygonal Designs: Existence and Construction John Hegean Departent of Matheatics, Stanford University, Stanford, CA 9405 Jeff Langford Departent of Matheatics, Drake University, Des Moines, IA 5011 G
Interferometry in dissipative media: Addressing the shallow sea problem for Seabed Logging applications
 Evert Slob and Kees Wapenaar, Departent of Geotechnology, Delft University of Technology Roel Snieder, Center for Wave Phenoena and Departent of Geophysics, Colorado School of Mines SUMMARY We derive interferoetric
Evert Slob and Kees Wapenaar, Departent of Geotechnology, Delft University of Technology Roel Snieder, Center for Wave Phenoena and Departent of Geophysics, Colorado School of Mines SUMMARY We derive interferoetric
Extension of CSRSM for the Parametric Study of the Face Stability of Pressurized Tunnels
 Extension of CSRSM for the Paraetric Study of the Face Stability of Pressurized Tunnels Guilhe Mollon 1, Daniel Dias 2, and Abdul-Haid Soubra 3, M.ASCE 1 LGCIE, INSA Lyon, Université de Lyon, Doaine scientifique
Extension of CSRSM for the Paraetric Study of the Face Stability of Pressurized Tunnels Guilhe Mollon 1, Daniel Dias 2, and Abdul-Haid Soubra 3, M.ASCE 1 LGCIE, INSA Lyon, Université de Lyon, Doaine scientifique
THE KALMAN FILTER: A LOOK BEHIND THE SCENE
 HE KALMA FILER: A LOOK BEHID HE SCEE R.E. Deain School of Matheatical and Geospatial Sciences, RMI University eail: rod.deain@rit.edu.au Presented at the Victorian Regional Survey Conference, Mildura,
HE KALMA FILER: A LOOK BEHID HE SCEE R.E. Deain School of Matheatical and Geospatial Sciences, RMI University eail: rod.deain@rit.edu.au Presented at the Victorian Regional Survey Conference, Mildura,
Interactive Markov Models of Evolutionary Algorithms
 Cleveland State University EngagedScholarship@CSU Electrical Engineering & Coputer Science Faculty Publications Electrical Engineering & Coputer Science Departent 2015 Interactive Markov Models of Evolutionary
Cleveland State University EngagedScholarship@CSU Electrical Engineering & Coputer Science Faculty Publications Electrical Engineering & Coputer Science Departent 2015 Interactive Markov Models of Evolutionary
A DESIGN GUIDE OF DOUBLE-LAYER CELLULAR CLADDINGS FOR BLAST ALLEVIATION
 International Journal of Aerospace and Lightweight Structures Vol. 3, No. 1 (2013) 109 133 c Research Publishing Services DOI: 10.3850/S201042862013000550 A DESIGN GUIDE OF DOUBLE-LAYER CELLULAR CLADDINGS
International Journal of Aerospace and Lightweight Structures Vol. 3, No. 1 (2013) 109 133 c Research Publishing Services DOI: 10.3850/S201042862013000550 A DESIGN GUIDE OF DOUBLE-LAYER CELLULAR CLADDINGS
Model Fitting. CURM Background Material, Fall 2014 Dr. Doreen De Leon
 Model Fitting CURM Background Material, Fall 014 Dr. Doreen De Leon 1 Introduction Given a set of data points, we often want to fit a selected odel or type to the data (e.g., we suspect an exponential
Model Fitting CURM Background Material, Fall 014 Dr. Doreen De Leon 1 Introduction Given a set of data points, we often want to fit a selected odel or type to the data (e.g., we suspect an exponential
Keywords: Estimator, Bias, Mean-squared error, normality, generalized Pareto distribution
 Testing approxiate norality of an estiator using the estiated MSE and bias with an application to the shape paraeter of the generalized Pareto distribution J. Martin van Zyl Abstract In this work the norality
Testing approxiate norality of an estiator using the estiated MSE and bias with an application to the shape paraeter of the generalized Pareto distribution J. Martin van Zyl Abstract In this work the norality
Grafting: Fast, Incremental Feature Selection by Gradient Descent in Function Space
 Journal of Machine Learning Research 3 (2003) 1333-1356 Subitted 5/02; Published 3/03 Grafting: Fast, Increental Feature Selection by Gradient Descent in Function Space Sion Perkins Space and Reote Sensing
Journal of Machine Learning Research 3 (2003) 1333-1356 Subitted 5/02; Published 3/03 Grafting: Fast, Increental Feature Selection by Gradient Descent in Function Space Sion Perkins Space and Reote Sensing
In this chapter, we consider several graph-theoretic and probabilistic models
 THREE ONE GRAPH-THEORETIC AND STATISTICAL MODELS 3.1 INTRODUCTION In this chapter, we consider several graph-theoretic and probabilistic odels for a social network, which we do under different assuptions
THREE ONE GRAPH-THEORETIC AND STATISTICAL MODELS 3.1 INTRODUCTION In this chapter, we consider several graph-theoretic and probabilistic odels for a social network, which we do under different assuptions
Intelligent Systems: Reasoning and Recognition. Artificial Neural Networks
 Intelligent Systes: Reasoning and Recognition Jaes L. Crowley MOSIG M1 Winter Seester 2018 Lesson 7 1 March 2018 Outline Artificial Neural Networks Notation...2 Introduction...3 Key Equations... 3 Artificial
Intelligent Systes: Reasoning and Recognition Jaes L. Crowley MOSIG M1 Winter Seester 2018 Lesson 7 1 March 2018 Outline Artificial Neural Networks Notation...2 Introduction...3 Key Equations... 3 Artificial
Bayes Decision Rule and Naïve Bayes Classifier
 Bayes Decision Rule and Naïve Bayes Classifier Le Song Machine Learning I CSE 6740, Fall 2013 Gaussian Mixture odel A density odel p(x) ay be ulti-odal: odel it as a ixture of uni-odal distributions (e.g.
Bayes Decision Rule and Naïve Bayes Classifier Le Song Machine Learning I CSE 6740, Fall 2013 Gaussian Mixture odel A density odel p(x) ay be ulti-odal: odel it as a ixture of uni-odal distributions (e.g.
Feature Extraction Techniques
 Feature Extraction Techniques Unsupervised Learning II Feature Extraction Unsupervised ethods can also be used to find features which can be useful for categorization. There are unsupervised ethods that
Feature Extraction Techniques Unsupervised Learning II Feature Extraction Unsupervised ethods can also be used to find features which can be useful for categorization. There are unsupervised ethods that
An Introduction to Meta-Analysis
 An Introduction to Meta-Analysis Douglas G. Bonett University of California, Santa Cruz How to cite this work: Bonett, D.G. (2016) An Introduction to Meta-analysis. Retrieved fro http://people.ucsc.edu/~dgbonett/eta.htl
An Introduction to Meta-Analysis Douglas G. Bonett University of California, Santa Cruz How to cite this work: Bonett, D.G. (2016) An Introduction to Meta-analysis. Retrieved fro http://people.ucsc.edu/~dgbonett/eta.htl
Lecture #8-3 Oscillations, Simple Harmonic Motion
 Lecture #8-3 Oscillations Siple Haronic Motion So far we have considered two basic types of otion: translation and rotation. But these are not the only two types of otion we can observe in every day life.
Lecture #8-3 Oscillations Siple Haronic Motion So far we have considered two basic types of otion: translation and rotation. But these are not the only two types of otion we can observe in every day life.
A method to determine relative stroke detection efficiencies from multiplicity distributions
 A ethod to deterine relative stroke detection eiciencies ro ultiplicity distributions Schulz W. and Cuins K. 2. Austrian Lightning Detection and Inoration Syste (ALDIS), Kahlenberger Str.2A, 90 Vienna,
A ethod to deterine relative stroke detection eiciencies ro ultiplicity distributions Schulz W. and Cuins K. 2. Austrian Lightning Detection and Inoration Syste (ALDIS), Kahlenberger Str.2A, 90 Vienna,
Kinematics and dynamics, a computational approach
 Kineatics and dynaics, a coputational approach We begin the discussion of nuerical approaches to echanics with the definition for the velocity r r ( t t) r ( t) v( t) li li or r( t t) r( t) v( t) t for
Kineatics and dynaics, a coputational approach We begin the discussion of nuerical approaches to echanics with the definition for the velocity r r ( t t) r ( t) v( t) li li or r( t t) r( t) v( t) t for
Multiscale Entropy Analysis: A New Method to Detect Determinism in a Time. Series. A. Sarkar and P. Barat. Variable Energy Cyclotron Centre
 Multiscale Entropy Analysis: A New Method to Detect Deterinis in a Tie Series A. Sarkar and P. Barat Variable Energy Cyclotron Centre /AF Bidhan Nagar, Kolkata 700064, India PACS nubers: 05.45.Tp, 89.75.-k,
Multiscale Entropy Analysis: A New Method to Detect Deterinis in a Tie Series A. Sarkar and P. Barat Variable Energy Cyclotron Centre /AF Bidhan Nagar, Kolkata 700064, India PACS nubers: 05.45.Tp, 89.75.-k,
Chapter 4: Hypothesis of Diffusion-Limited Growth
 Suary This section derives a useful equation to predict quantu dot size evolution under typical organoetallic synthesis conditions that are used to achieve narrow size distributions. Assuing diffusion-controlled
Suary This section derives a useful equation to predict quantu dot size evolution under typical organoetallic synthesis conditions that are used to achieve narrow size distributions. Assuing diffusion-controlled
Nonmonotonic Networks. a. IRST, I Povo (Trento) Italy, b. Univ. of Trento, Physics Dept., I Povo (Trento) Italy
 Italy, b. Univ. of Trento, Physics Dept., I Povo (Trento) Italy") Storage Capacity and Dynaics of Nononotonic Networks Bruno Crespi a and Ignazio Lazzizzera b a. IRST, I-38050 Povo (Trento) Italy, b. Univ. of Trento, Physics Dept., I-38050 Povo (Trento) Italy INFN Gruppo
Storage Capacity and Dynaics of Nononotonic Networks Bruno Crespi a and Ignazio Lazzizzera b a. IRST, I-38050 Povo (Trento) Italy, b. Univ. of Trento, Physics Dept., I-38050 Povo (Trento) Italy INFN Gruppo
ABSTRACT INTRODUCTION
 Wave Resistance Prediction of a Cataaran by Linearised Theory M.INSEL Faculty of Naval Architecture and Ocean Engineering, Istanbul Technical University, TURKEY A.F.MOLLAND, J.F.WELLICOME Departent of
Wave Resistance Prediction of a Cataaran by Linearised Theory M.INSEL Faculty of Naval Architecture and Ocean Engineering, Istanbul Technical University, TURKEY A.F.MOLLAND, J.F.WELLICOME Departent of
Estimation of the Mean of the Exponential Distribution Using Maximum Ranked Set Sampling with Unequal Samples
 Open Journal of Statistics, 4, 4, 64-649 Published Online Septeber 4 in SciRes http//wwwscirporg/ournal/os http//ddoiorg/436/os4486 Estiation of the Mean of the Eponential Distribution Using Maiu Ranked
Open Journal of Statistics, 4, 4, 64-649 Published Online Septeber 4 in SciRes http//wwwscirporg/ournal/os http//ddoiorg/436/os4486 Estiation of the Mean of the Eponential Distribution Using Maiu Ranked
Multi-Scale/Multi-Resolution: Wavelet Transform
 Multi-Scale/Multi-Resolution: Wavelet Transfor Proble with Fourier Fourier analysis -- breaks down a signal into constituent sinusoids of different frequencies. A serious drawback in transforing to the
Multi-Scale/Multi-Resolution: Wavelet Transfor Proble with Fourier Fourier analysis -- breaks down a signal into constituent sinusoids of different frequencies. A serious drawback in transforing to the
Pattern Recognition and Machine Learning. Learning and Evaluation for Pattern Recognition
 Pattern Recognition and Machine Learning Jaes L. Crowley ENSIMAG 3 - MMIS Fall Seester 2017 Lesson 1 4 October 2017 Outline Learning and Evaluation for Pattern Recognition Notation...2 1. The Pattern Recognition
Pattern Recognition and Machine Learning Jaes L. Crowley ENSIMAG 3 - MMIS Fall Seester 2017 Lesson 1 4 October 2017 Outline Learning and Evaluation for Pattern Recognition Notation...2 1. The Pattern Recognition
An Inverse Interpolation Method Utilizing In-Flight Strain Measurements for Determining Loads and Structural Response of Aerospace Vehicles
 An Inverse Interpolation Method Utilizing In-Flight Strain Measureents for Deterining Loads and Structural Response of Aerospace Vehicles S. Shkarayev and R. Krashantisa University of Arizona, Tucson,
An Inverse Interpolation Method Utilizing In-Flight Strain Measureents for Deterining Loads and Structural Response of Aerospace Vehicles S. Shkarayev and R. Krashantisa University of Arizona, Tucson,
Research in Area of Longevity of Sylphon Scraies
 IOP Conference Series: Earth and Environental Science PAPER OPEN ACCESS Research in Area of Longevity of Sylphon Scraies To cite this article: Natalia Y Golovina and Svetlana Y Krivosheeva 2018 IOP Conf.
IOP Conference Series: Earth and Environental Science PAPER OPEN ACCESS Research in Area of Longevity of Sylphon Scraies To cite this article: Natalia Y Golovina and Svetlana Y Krivosheeva 2018 IOP Conf.
E0 370 Statistical Learning Theory Lecture 6 (Aug 30, 2011) Margin Analysis
 Margin Analysis") E0 370 tatistical Learning Theory Lecture 6 (Aug 30, 20) Margin Analysis Lecturer: hivani Agarwal cribe: Narasihan R Introduction In the last few lectures we have seen how to obtain high confidence bounds
E0 370 tatistical Learning Theory Lecture 6 (Aug 30, 20) Margin Analysis Lecturer: hivani Agarwal cribe: Narasihan R Introduction In the last few lectures we have seen how to obtain high confidence bounds
Successive Model-Updating of the dynamic behaviour of casing bodies on a practical example of an axial piston pump
 Successive Model-Updating of the dynaic behaviour of casing bodies on a practical exaple of an axial piston pup Ulrich Bittner Bosch Rexroth, Horb, Gerany Suary: These days, generally all new products
Successive Model-Updating of the dynaic behaviour of casing bodies on a practical exaple of an axial piston pup Ulrich Bittner Bosch Rexroth, Horb, Gerany Suary: These days, generally all new products
Automated Frequency Domain Decomposition for Operational Modal Analysis
 Autoated Frequency Doain Decoposition for Operational Modal Analysis Rune Brincker Departent of Civil Engineering, University of Aalborg, Sohngaardsholsvej 57, DK-9000 Aalborg, Denark Palle Andersen Structural
Autoated Frequency Doain Decoposition for Operational Modal Analysis Rune Brincker Departent of Civil Engineering, University of Aalborg, Sohngaardsholsvej 57, DK-9000 Aalborg, Denark Palle Andersen Structural
Quantum algorithms (CO 781, Winter 2008) Prof. Andrew Childs, University of Waterloo LECTURE 15: Unstructured search and spatial search
 Prof. Andrew Childs, University of Waterloo LECTURE 15: Unstructured search and spatial search") Quantu algoriths (CO 781, Winter 2008) Prof Andrew Childs, University of Waterloo LECTURE 15: Unstructured search and spatial search ow we begin to discuss applications of quantu walks to search algoriths
Quantu algoriths (CO 781, Winter 2008) Prof Andrew Childs, University of Waterloo LECTURE 15: Unstructured search and spatial search ow we begin to discuss applications of quantu walks to search algoriths
A Self-Organizing Model for Logical Regression Jerry Farlow 1 University of Maine. (1900 words)
") 1 A Self-Organizing Model for Logical Regression Jerry Farlow 1 University of Maine (1900 words) Contact: Jerry Farlow Dept of Matheatics Univeristy of Maine Orono, ME 04469 Tel (07) 866-3540 Eail: farlow@ath.uaine.edu
1 A Self-Organizing Model for Logical Regression Jerry Farlow 1 University of Maine (1900 words) Contact: Jerry Farlow Dept of Matheatics Univeristy of Maine Orono, ME 04469 Tel (07) 866-3540 Eail: farlow@ath.uaine.edu
DERIVING PROPER UNIFORM PRIORS FOR REGRESSION COEFFICIENTS
 DERIVING PROPER UNIFORM PRIORS FOR REGRESSION COEFFICIENTS N. van Erp and P. van Gelder Structural Hydraulic and Probabilistic Design, TU Delft Delft, The Netherlands Abstract. In probles of odel coparison
DERIVING PROPER UNIFORM PRIORS FOR REGRESSION COEFFICIENTS N. van Erp and P. van Gelder Structural Hydraulic and Probabilistic Design, TU Delft Delft, The Netherlands Abstract. In probles of odel coparison
Simulation of Geomechanical Behavior during SAGD Process using COMSOL Multiphysics
 Siulation of Geoechanical Behavior during SAGD Process using COMSOL Multiphysics X. Gong 1, R.Wan *2 Departent of Civil Engineering, University of Calgary, Calgary, Alberta, Canada. *Corresponding author:
Siulation of Geoechanical Behavior during SAGD Process using COMSOL Multiphysics X. Gong 1, R.Wan *2 Departent of Civil Engineering, University of Calgary, Calgary, Alberta, Canada. *Corresponding author:
12 Towards hydrodynamic equations J Nonlinear Dynamics II: Continuum Systems Lecture 12 Spring 2015
 18.354J Nonlinear Dynaics II: Continuu Systes Lecture 12 Spring 2015 12 Towards hydrodynaic equations The previous classes focussed on the continuu description of static (tie-independent) elastic systes.
18.354J Nonlinear Dynaics II: Continuu Systes Lecture 12 Spring 2015 12 Towards hydrodynaic equations The previous classes focussed on the continuu description of static (tie-independent) elastic systes.
Use of PSO in Parameter Estimation of Robot Dynamics; Part One: No Need for Parameterization
 Use of PSO in Paraeter Estiation of Robot Dynaics; Part One: No Need for Paraeterization Hossein Jahandideh, Mehrzad Navar Abstract Offline procedures for estiating paraeters of robot dynaics are practically
Use of PSO in Paraeter Estiation of Robot Dynaics; Part One: No Need for Paraeterization Hossein Jahandideh, Mehrzad Navar Abstract Offline procedures for estiating paraeters of robot dynaics are practically
Weighted- 1 minimization with multiple weighting sets
 Weighted- 1 iniization with ultiple weighting sets Hassan Mansour a,b and Özgür Yılaza a Matheatics Departent, University of British Colubia, Vancouver - BC, Canada; b Coputer Science Departent, University
Weighted- 1 iniization with ultiple weighting sets Hassan Mansour a,b and Özgür Yılaza a Matheatics Departent, University of British Colubia, Vancouver - BC, Canada; b Coputer Science Departent, University
Analyzing Simulation Results
 Analyzing Siulation Results Dr. John Mellor-Cruey Departent of Coputer Science Rice University johnc@cs.rice.edu COMP 528 Lecture 20 31 March 2005 Topics for Today Model verification Model validation Transient
Analyzing Siulation Results Dr. John Mellor-Cruey Departent of Coputer Science Rice University johnc@cs.rice.edu COMP 528 Lecture 20 31 March 2005 Topics for Today Model verification Model validation Transient
Symbolic Analysis as Universal Tool for Deriving Properties of Non-linear Algorithms Case study of EM Algorithm
 Acta Polytechnica Hungarica Vol., No., 04 Sybolic Analysis as Universal Tool for Deriving Properties of Non-linear Algoriths Case study of EM Algorith Vladiir Mladenović, Miroslav Lutovac, Dana Porrat
Acta Polytechnica Hungarica Vol., No., 04 Sybolic Analysis as Universal Tool for Deriving Properties of Non-linear Algoriths Case study of EM Algorith Vladiir Mladenović, Miroslav Lutovac, Dana Porrat
Accuracy of the Scaling Law for Experimental Natural Frequencies of Rectangular Thin Plates
 The 9th Conference of Mechanical Engineering Network of Thailand 9- October 005, Phuket, Thailand Accuracy of the caling Law for Experiental Natural Frequencies of Rectangular Thin Plates Anawat Na songkhla
The 9th Conference of Mechanical Engineering Network of Thailand 9- October 005, Phuket, Thailand Accuracy of the caling Law for Experiental Natural Frequencies of Rectangular Thin Plates Anawat Na songkhla
Fairness via priority scheduling
 Fairness via priority scheduling Veeraruna Kavitha, N Heachandra and Debayan Das IEOR, IIT Bobay, Mubai, 400076, India vavitha,nh,debayan}@iitbacin Abstract In the context of ulti-agent resource allocation
Fairness via priority scheduling Veeraruna Kavitha, N Heachandra and Debayan Das IEOR, IIT Bobay, Mubai, 400076, India vavitha,nh,debayan}@iitbacin Abstract In the context of ulti-agent resource allocation