Workshop on Theoretical Ecology and Global Change March 2009
|
|
|
- Derick Davis
- 5 years ago
- Views:
Transcription
1 Workshop on Theoretical Ecology and Global Change 2-18 March 2009 Stability Analysis of Food Webs: An Introduction to Local Stability of Dynamical Systems S. Allesina National Center for Ecological Analysis and Synthesis Santa Barbara USA
2 Stability Analysis of Food Webs An Introduction to Local Stability of Dynamical Systems Stefano Allesina National Center for Ecological Analysis & Synthesis (NCEAS) & University of Chicago Ecology & Evolution, Computation Institute Theoretical Ecology and Global Change March 2009
3 Outline 1 Stability of simple dynamical systems What is stability? Graphical methods Two populations Phase Plane 2 Stability in multispecies communities Community Matrix Examples 3 Ecological implications Complexity-Stability Predator-Prey Qualitative Stability Beyond dominant eigenvalues What causes stability?
4 A simple dynamical system We can describe the dynamics of a population through time by means of an autonomous ordinary differential equation: One Population Where: dx (t) = f (X (t)) (1) X (t) density (or biomass) of population X at time t. f (X (t)) function of X (t). dx (t) rate of change. In the remainder of the talk we will write X for X (t).
5 Equilibrium The population reaches a fixed point when: Equilibrium dx = 0 = f (X ) (2) We will indicate with X the solution of the equation above. If X > 0 feasible equilibrium. If X = 0 extinction. If X < 0 unfeasible equilibrium. We are typically interested in feasible equilibria only.
6 Stability Say that the population is at a fixed point X. What happens if we perturb it (i.e. we move the population to X + x(t)? Does the system recover from the perturbation? Figure adapted from Soetaert and Herman, 2009
7 Stability: graphical methods ( dx = rx 1 X ) K X θ X + h (3) dx/ X0 X2 X1 unstable stable X Figure adapted from Soetaert and Herman, 2009
8 Stability: two populations Simple predator-prey system X is the prey Y is the predator dx dx = f X (X, Y ) dy = f Y (X, Y ) = (b d)x ( 1 X ) αxy K dy = αɛxy my
9 Stability: two populations Simple predator-prey system dx = (b d)x ( 1 X ) αxy K dy = αɛxy my b is the birth and d the death rate for the prey. K is the carrying capacity for the prey (max. possible level). α is the interaction term, modeling the probability of effective encounters. ɛ is the efficiency of the predator. m is the death rate for the predator.
10 When there is no predator dx = (b d)x ( 1 X ) K The equilibrium values are: ( 0 = (b d)x 1 X ) X = 0, X = K K
11 When predators are present dx = (b d)x ( 1 X ) αxy K The equilibrium values are: 0 = (b d)x ( 1 X ) αxy K Y = b d α X = 0, (1 X ) K This is called the zero isocline for X.
12 Isocline for the predator dy = αɛxy my The equilibrium values are: 0 = αɛxy my Y = 0, X = m ɛα This is called the zero isocline for Y.
13 Phase Plane Predator Y Prey X
14 Trajectories Predator Y Prey X
15 Trajectories Predator Y Prey X
16 Trajectories Predator Y Prey X
17 Stability in multiple species communities Feasible Equilibrium: dx i = f i (X 1,..., X n ) f i (X 1,..., X n ) = 0 i X i > 0 i How to evaluate stability of equilibria?
18 Perturbation X i (t) = X i + x i (t) We want to study if the perturbation x i grows or tends to zero. We can write the change in the growth rate of x (using Taylor expansion): dx i = α ij x j (4) j We can rewrite the system in matrix form: dx = Ax (5)
19 Community matrix dx = Ax A is the community matrix for the system. A is defined as: A [α ij ] = f i X j X 1,...,X n We can rewrite the effects of a perturbation studying the eigenvalues of the community matrix: dx i = j γ ij e λ j t (6) Depending on the sign of the eigenvalues we can classify the equilibrium.
20 Eigenvalues Eigenvalues can have real and imaginary parts λ j = r j ± ic j. We can classify systems behavior after a perturbation according to the signs of eigenvalues. r j c j System Behavior after Perturbation < 0, j 0, j Stable: returns to the fixed point monotonically. < 0, j 0, j Stable: returns to the fixed point with damped oscillations. = 0, j 0, j Neutrally stable: moves to a new fixed point. = 0, j 0, j Neutrally stable: sustained oscillations. > 0, j 0, j Unstable: moves monotonically away from the fixed point. > 0, j 0, j Unstable: moves away with increasing oscillations. If the eigenvalues of matrix A λ i all have negative real parts, Re(λ i ) < 0 i, then the equilibrium X is Lyapunov stable: the system will return to the fixed point when perturbed.
21 A simple example { dx = X ( 1 X ) K pxy = pxy my dy Equilibria { X = 0 Y = 0 { X = K Y = 0 { X = m p Y = 1 p ( ) 1 m Kp
22 A simple example Jacobian { dx = X ( 1 X ) K pxy = pxy my dy dx X = 1 2X K py dx Y dy X dy Y = px = py = px m
23 A simple example Jacobian dx X = 1 2X K py = m Kp X,Y dx Y = px = m X,Y dy X = py = 1 m Kp X,Y dy Y = px m = 0 X,Y
24 A simple example Community Matrix C = [ m Kp m 1 m Kp 0 ] Char Poly Det(C λi) = 0 = m Kp λ m 1 m Kp λ Char Poly Det(C λi) = 0 = λ 2 + λ m ( Kp + m 1 m ) Kp
25 A simple example Char Poly Det(C λi) = 0 = m Kp λ m 1 m Kp λ Char Poly Det(C λi) = 0 = λ 2 + λ m ( Kp + m 1 m ) Kp Eigenvalue λ 1,2 = m ± m 2 + 4Kmp 4K 2 p 2 m 2Kp
26 Example: K=10, m=0.1, p=0.1 Eigenvalue λ 1,2 = 0.05 ± 0.947i population time
27
28 May Argument: Networks S Species
29 May Argument: Networks Self Limitation (m ii < 0). Dots stand for negative coefficients. Arrows for positive coefficients.
30 May Argument: Networks Two species interact with probability C (Connectance).
31 May Argument: Networks Two species interact with probability C (Connectance). The signs of interaction and interaction strengths are random (Standard Normal Distribution)
32 May Argument: Main Result Probability of stability 0 (for large communities) when: σ 2 SC > 1 This relation tells us that the probability of stability, for a given variance, tends to 0 when the richness or the connectance of the system are large enough. Therefore, according to this argument, we would not expect to observe rich, highly interconnected ecosystems.
33 May Argument: Main Result - Numeric Simulations Percentage of Stable System Random Connectance Size
34 May Argument: Consequences This is one of the most influential articles in theoretical ecology. The statement that complex, rich systems are unstable has been attacked from different angles (functional responses, persistence, other types of stability). Although this work was published in 1972, it is still important for recent papers.
35
36 Predator-Prey: Networks S Species
37 Predator-Prey: Networks Self Limitation (m ii < 0). Dots stand for negative coefficients. Arrows for positive coefficients.
38 Predator-Prey: Networks Two species interact with probability C/2. The interaction is always predator-prey (+/-). The Connectance is therefore C.

39 Predator-Prey: Networks Two species interact with probability C/2. The interaction is always predator-prey (+/-). The Connectance is therefore C. The signs of interaction are fixed, but interaction strengths are random (Standard Normal Distribution).
40 May Argument: Main Result - Numeric Simulations Percentage of Stable System Random Connectance Size
41 Predator-Prey - Numeric Simulations Percentage of Stable System Predator Prey Connectance Size
42 Qualitative Stability
43 Qualitative Stability
44 Alternatives to dominant eigenvalue
45 Weak interactions
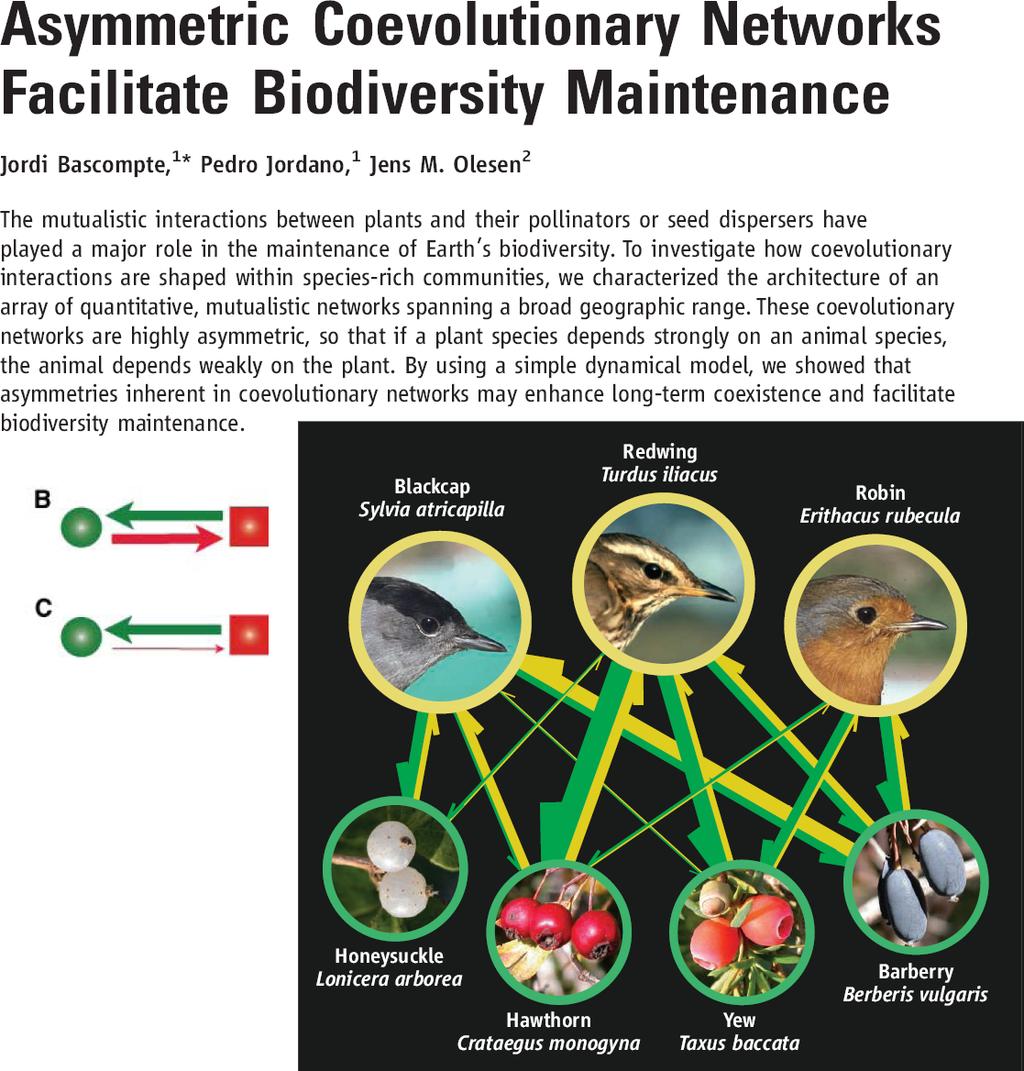
46 Asymmetric interactions
47 Stability Analysis of Food Webs An Introduction to Local Stability of Dynamical Systems Stefano Allesina National Center for Ecological Analysis & Synthesis (NCEAS) & University of Chicago Ecology & Evolution, Computation Institute Theoretical Ecology and Global Change March 2009
Ordinary Differential Equations
 Ordinary Differential Equations Michael H. F. Wilkinson Institute for Mathematics and Computing Science University of Groningen The Netherlands December 2005 Overview What are Ordinary Differential Equations
Ordinary Differential Equations Michael H. F. Wilkinson Institute for Mathematics and Computing Science University of Groningen The Netherlands December 2005 Overview What are Ordinary Differential Equations
STABILITY. Phase portraits and local stability
 MAS271 Methods for differential equations Dr. R. Jain STABILITY Phase portraits and local stability We are interested in system of ordinary differential equations of the form ẋ = f(x, y), ẏ = g(x, y),
MAS271 Methods for differential equations Dr. R. Jain STABILITY Phase portraits and local stability We are interested in system of ordinary differential equations of the form ẋ = f(x, y), ẏ = g(x, y),
Problem set 7 Math 207A, Fall 2011 Solutions
 Problem set 7 Math 207A, Fall 2011 s 1. Classify the equilibrium (x, y) = (0, 0) of the system x t = x, y t = y + x 2. Is the equilibrium hyperbolic? Find an equation for the trajectories in (x, y)- phase
Problem set 7 Math 207A, Fall 2011 s 1. Classify the equilibrium (x, y) = (0, 0) of the system x t = x, y t = y + x 2. Is the equilibrium hyperbolic? Find an equation for the trajectories in (x, y)- phase
Math 232, Final Test, 20 March 2007
 Math 232, Final Test, 20 March 2007 Name: Instructions. Do any five of the first six questions, and any five of the last six questions. Please do your best, and show all appropriate details in your solutions.
Math 232, Final Test, 20 March 2007 Name: Instructions. Do any five of the first six questions, and any five of the last six questions. Please do your best, and show all appropriate details in your solutions.
Lecture 20/Lab 21: Systems of Nonlinear ODEs
 Lecture 20/Lab 21: Systems of Nonlinear ODEs MAR514 Geoffrey Cowles Department of Fisheries Oceanography School for Marine Science and Technology University of Massachusetts-Dartmouth Coupled ODEs: Species
Lecture 20/Lab 21: Systems of Nonlinear ODEs MAR514 Geoffrey Cowles Department of Fisheries Oceanography School for Marine Science and Technology University of Massachusetts-Dartmouth Coupled ODEs: Species
8 Ecosystem stability
 8 Ecosystem stability References: May [47], Strogatz [48]. In these lectures we consider models of populations, with an emphasis on the conditions for stability and instability. 8.1 Dynamics of a single
8 Ecosystem stability References: May [47], Strogatz [48]. In these lectures we consider models of populations, with an emphasis on the conditions for stability and instability. 8.1 Dynamics of a single
Math Lecture 46
 Math 2280 - Lecture 46 Dylan Zwick Fall 2013 Today we re going to use the tools we ve developed in the last two lectures to analyze some systems of nonlinear differential equations that arise in simple
Math 2280 - Lecture 46 Dylan Zwick Fall 2013 Today we re going to use the tools we ve developed in the last two lectures to analyze some systems of nonlinear differential equations that arise in simple
A Producer-Consumer Model With Stoichiometry
 A Producer-Consumer Model With Stoichiometry Plan B project toward the completion of the Master of Science degree in Mathematics at University of Minnesota Duluth Respectfully submitted by Laura Joan Zimmermann
A Producer-Consumer Model With Stoichiometry Plan B project toward the completion of the Master of Science degree in Mathematics at University of Minnesota Duluth Respectfully submitted by Laura Joan Zimmermann
An Application of Perturbation Methods in Evolutionary Ecology
 Dynamics at the Horsetooth Volume 2A, 2010. Focused Issue: Asymptotics and Perturbations An Application of Perturbation Methods in Evolutionary Ecology Department of Mathematics Colorado State University
Dynamics at the Horsetooth Volume 2A, 2010. Focused Issue: Asymptotics and Perturbations An Application of Perturbation Methods in Evolutionary Ecology Department of Mathematics Colorado State University
Chapter #4 EEE8086-EEE8115. Robust and Adaptive Control Systems
 Chapter #4 Robust and Adaptive Control Systems Nonlinear Dynamics.... Linear Combination.... Equilibrium points... 3 3. Linearisation... 5 4. Limit cycles... 3 5. Bifurcations... 4 6. Stability... 6 7.
Chapter #4 Robust and Adaptive Control Systems Nonlinear Dynamics.... Linear Combination.... Equilibrium points... 3 3. Linearisation... 5 4. Limit cycles... 3 5. Bifurcations... 4 6. Stability... 6 7.
Lotka Volterra Predator-Prey Model with a Predating Scavenger
 Lotka Volterra Predator-Prey Model with a Predating Scavenger Monica Pescitelli Georgia College December 13, 2013 Abstract The classic Lotka Volterra equations are used to model the population dynamics
Lotka Volterra Predator-Prey Model with a Predating Scavenger Monica Pescitelli Georgia College December 13, 2013 Abstract The classic Lotka Volterra equations are used to model the population dynamics
MATH 1014 N 3.0 W2015 APPLIED CALCULUS II - SECTION P. Perhaps the most important of all the applications of calculus is to differential equations.
 MATH 1014 N 3.0 W2015 APPLIED CALCULUS II - SECTION P Stewart Chapter 9 Differential Equations Perhaps the most important of all the applications of calculus is to differential equations. 9.1 Modeling
MATH 1014 N 3.0 W2015 APPLIED CALCULUS II - SECTION P Stewart Chapter 9 Differential Equations Perhaps the most important of all the applications of calculus is to differential equations. 9.1 Modeling
Continuous time population models
 Continuous time population models Jaap van der Meer jaap.van.der.meer@nioz.nl Abstract Many simple theoretical population models in continuous time relate the rate of change of the size of two populations
Continuous time population models Jaap van der Meer jaap.van.der.meer@nioz.nl Abstract Many simple theoretical population models in continuous time relate the rate of change of the size of two populations
1 (t + 4)(t 1) dt. Solution: The denominator of the integrand is already factored with the factors being distinct, so 1 (t + 4)(t 1) = A
(t 1) dt. Solution: The denominator of the integrand is already factored with the factors being distinct, so 1 (t + 4)(t 1) = A") Calculus Topic: Integration of Rational Functions Section 8. # 0: Evaluate the integral (t + )(t ) Solution: The denominator of the integrand is already factored with the factors being distinct, so (t
Calculus Topic: Integration of Rational Functions Section 8. # 0: Evaluate the integral (t + )(t ) Solution: The denominator of the integrand is already factored with the factors being distinct, so (t
Nonlinear dynamics & chaos BECS
 Nonlinear dynamics & chaos BECS-114.7151 Phase portraits Focus: nonlinear systems in two dimensions General form of a vector field on the phase plane: Vector notation: Phase portraits Solution x(t) describes
Nonlinear dynamics & chaos BECS-114.7151 Phase portraits Focus: nonlinear systems in two dimensions General form of a vector field on the phase plane: Vector notation: Phase portraits Solution x(t) describes
Stability of Dynamical systems
 Stability of Dynamical systems Stability Isolated equilibria Classification of Isolated Equilibria Attractor and Repeller Almost linear systems Jacobian Matrix Stability Consider an autonomous system u
Stability of Dynamical systems Stability Isolated equilibria Classification of Isolated Equilibria Attractor and Repeller Almost linear systems Jacobian Matrix Stability Consider an autonomous system u
Math 312 Lecture Notes Linearization
 Math 3 Lecture Notes Linearization Warren Weckesser Department of Mathematics Colgate University 3 March 005 These notes discuss linearization, in which a linear system is used to approximate the behavior
Math 3 Lecture Notes Linearization Warren Weckesser Department of Mathematics Colgate University 3 March 005 These notes discuss linearization, in which a linear system is used to approximate the behavior
Gerardo Zavala. Math 388. Predator-Prey Models
 Gerardo Zavala Math 388 Predator-Prey Models Spring 2013 1 History In the 1920s A. J. Lotka developed a mathematical model for the interaction between two species. The mathematician Vito Volterra worked
Gerardo Zavala Math 388 Predator-Prey Models Spring 2013 1 History In the 1920s A. J. Lotka developed a mathematical model for the interaction between two species. The mathematician Vito Volterra worked
EG4321/EG7040. Nonlinear Control. Dr. Matt Turner
 EG4321/EG7040 Nonlinear Control Dr. Matt Turner EG4321/EG7040 [An introduction to] Nonlinear Control Dr. Matt Turner EG4321/EG7040 [An introduction to] Nonlinear [System Analysis] and Control Dr. Matt
EG4321/EG7040 Nonlinear Control Dr. Matt Turner EG4321/EG7040 [An introduction to] Nonlinear Control Dr. Matt Turner EG4321/EG7040 [An introduction to] Nonlinear [System Analysis] and Control Dr. Matt
NONSTANDARD NUMERICAL METHODS FOR A CLASS OF PREDATOR-PREY MODELS WITH PREDATOR INTERFERENCE
 Sixth Mississippi State Conference on Differential Equations and Computational Simulations, Electronic Journal of Differential Equations, Conference 15 (2007), pp. 67 75. ISSN: 1072-6691. URL: http://ejde.math.txstate.edu
Sixth Mississippi State Conference on Differential Equations and Computational Simulations, Electronic Journal of Differential Equations, Conference 15 (2007), pp. 67 75. ISSN: 1072-6691. URL: http://ejde.math.txstate.edu
Dynamics on a General Stage Structured n Parallel Food Chains
 Memorial University of Newfoundland Dynamics on a General Stage Structured n Parallel Food Chains Isam Al-Darabsah and Yuan Yuan November 4, 2013 Outline: Propose a general model with n parallel food chains
Memorial University of Newfoundland Dynamics on a General Stage Structured n Parallel Food Chains Isam Al-Darabsah and Yuan Yuan November 4, 2013 Outline: Propose a general model with n parallel food chains
Complex Dynamic Systems: Qualitative vs Quantitative analysis
 Complex Dynamic Systems: Qualitative vs Quantitative analysis Complex Dynamic Systems Chiara Mocenni Department of Information Engineering and Mathematics University of Siena (mocenni@diism.unisi.it) Dynamic
Complex Dynamic Systems: Qualitative vs Quantitative analysis Complex Dynamic Systems Chiara Mocenni Department of Information Engineering and Mathematics University of Siena (mocenni@diism.unisi.it) Dynamic
(Refer Slide Time: 00:32)
") Nonlinear Dynamical Systems Prof. Madhu. N. Belur and Prof. Harish. K. Pillai Department of Electrical Engineering Indian Institute of Technology, Bombay Lecture - 12 Scilab simulation of Lotka Volterra
Nonlinear Dynamical Systems Prof. Madhu. N. Belur and Prof. Harish. K. Pillai Department of Electrical Engineering Indian Institute of Technology, Bombay Lecture - 12 Scilab simulation of Lotka Volterra
3.5 Competition Models: Principle of Competitive Exclusion
 94 3. Models for Interacting Populations different dimensional parameter changes. For example, doubling the carrying capacity K is exactly equivalent to halving the predator response parameter D. The dimensionless
94 3. Models for Interacting Populations different dimensional parameter changes. For example, doubling the carrying capacity K is exactly equivalent to halving the predator response parameter D. The dimensionless
Getting Started With The Predator - Prey Model: Nullclines
 Getting Started With The Predator - Prey Model: Nullclines James K. Peterson Department of Biological Sciences and Department of Mathematical Sciences Clemson University October 28, 2013 Outline The Predator
Getting Started With The Predator - Prey Model: Nullclines James K. Peterson Department of Biological Sciences and Department of Mathematical Sciences Clemson University October 28, 2013 Outline The Predator
Math 341 Fall 2006 Final Exam December 12th, Name:
 Math 341 Fall 2006 Final Exam December 12th, 2006 Name: You may use a calculator, your note card and something to write with. You must attach your notecard to the exam when you turn it in. You cannot use
Math 341 Fall 2006 Final Exam December 12th, 2006 Name: You may use a calculator, your note card and something to write with. You must attach your notecard to the exam when you turn it in. You cannot use
Introduction to Dynamical Systems
 Introduction to Dynamical Systems Autonomous Planar Systems Vector form of a Dynamical System Trajectories Trajectories Don t Cross Equilibria Population Biology Rabbit-Fox System Trout System Trout System
Introduction to Dynamical Systems Autonomous Planar Systems Vector form of a Dynamical System Trajectories Trajectories Don t Cross Equilibria Population Biology Rabbit-Fox System Trout System Trout System
2 Lyapunov Stability. x(0) x 0 < δ x(t) x 0 < ɛ
 x 0 < δ x(t) x 0 < ɛ") 1 2 Lyapunov Stability Whereas I/O stability is concerned with the effect of inputs on outputs, Lyapunov stability deals with unforced systems: ẋ = f(x, t) (1) where x R n, t R +, and f : R n R + R n.
1 2 Lyapunov Stability Whereas I/O stability is concerned with the effect of inputs on outputs, Lyapunov stability deals with unforced systems: ẋ = f(x, t) (1) where x R n, t R +, and f : R n R + R n.
Linearization of Differential Equation Models
 Linearization of Differential Equation Models 1 Motivation We cannot solve most nonlinear models, so we often instead try to get an overall feel for the way the model behaves: we sometimes talk about looking
Linearization of Differential Equation Models 1 Motivation We cannot solve most nonlinear models, so we often instead try to get an overall feel for the way the model behaves: we sometimes talk about looking
Fundamentals of Dynamical Systems / Discrete-Time Models. Dr. Dylan McNamara people.uncw.edu/ mcnamarad
 Fundamentals of Dynamical Systems / Discrete-Time Models Dr. Dylan McNamara people.uncw.edu/ mcnamarad Dynamical systems theory Considers how systems autonomously change along time Ranges from Newtonian
Fundamentals of Dynamical Systems / Discrete-Time Models Dr. Dylan McNamara people.uncw.edu/ mcnamarad Dynamical systems theory Considers how systems autonomously change along time Ranges from Newtonian
2D-Volterra-Lotka Modeling For 2 Species
 Majalat Al-Ulum Al-Insaniya wat - Tatbiqiya 2D-Volterra-Lotka Modeling For 2 Species Alhashmi Darah 1 University of Almergeb Department of Mathematics Faculty of Science Zliten Libya. Abstract The purpose
Majalat Al-Ulum Al-Insaniya wat - Tatbiqiya 2D-Volterra-Lotka Modeling For 2 Species Alhashmi Darah 1 University of Almergeb Department of Mathematics Faculty of Science Zliten Libya. Abstract The purpose
Mathematical Models of Biological Systems
 Mathematical Models of Biological Systems CH924 November 25, 2012 Course outline Syllabus: Week 6: Stability of first-order autonomous differential equation, genetic switch/clock, introduction to enzyme
Mathematical Models of Biological Systems CH924 November 25, 2012 Course outline Syllabus: Week 6: Stability of first-order autonomous differential equation, genetic switch/clock, introduction to enzyme
Stable Coexistence of a Predator-Prey model with a Scavenger
 ANTON DE KOM UNIVERSITEIT VAN SURINAME INSTITUTE FOR GRADUATE STUDIES AND RESEARCH Stable Coexistence of a Predator-Prey model with a Scavenger Thesis in partial fulfillment of the requirements for the
ANTON DE KOM UNIVERSITEIT VAN SURINAME INSTITUTE FOR GRADUATE STUDIES AND RESEARCH Stable Coexistence of a Predator-Prey model with a Scavenger Thesis in partial fulfillment of the requirements for the
Models Involving Interactions between Predator and Prey Populations
 Models Involving Interactions between Predator and Prey Populations Matthew Mitchell Georgia College and State University December 30, 2015 Abstract Predator-prey models are used to show the intricate
Models Involving Interactions between Predator and Prey Populations Matthew Mitchell Georgia College and State University December 30, 2015 Abstract Predator-prey models are used to show the intricate
Lecture 3. Dynamical Systems in Continuous Time
 Lecture 3. Dynamical Systems in Continuous Time University of British Columbia, Vancouver Yue-Xian Li November 2, 2017 1 3.1 Exponential growth and decay A Population With Generation Overlap Consider a
Lecture 3. Dynamical Systems in Continuous Time University of British Columbia, Vancouver Yue-Xian Li November 2, 2017 1 3.1 Exponential growth and decay A Population With Generation Overlap Consider a
Entrance Exam, Differential Equations April, (Solve exactly 6 out of the 8 problems) y + 2y + y cos(x 2 y) = 0, y(0) = 2, y (0) = 4.
 y + 2y + y cos(x 2 y) = 0, y(0) = 2, y (0) = 4.") Entrance Exam, Differential Equations April, 7 (Solve exactly 6 out of the 8 problems). Consider the following initial value problem: { y + y + y cos(x y) =, y() = y. Find all the values y such that the
Entrance Exam, Differential Equations April, 7 (Solve exactly 6 out of the 8 problems). Consider the following initial value problem: { y + y + y cos(x y) =, y() = y. Find all the values y such that the
Lab 5: Nonlinear Systems
 Lab 5: Nonlinear Systems Goals In this lab you will use the pplane6 program to study two nonlinear systems by direct numerical simulation. The first model, from population biology, displays interesting
Lab 5: Nonlinear Systems Goals In this lab you will use the pplane6 program to study two nonlinear systems by direct numerical simulation. The first model, from population biology, displays interesting
Lotka-Volterra Models Nizar Ezroura M53
 Lotka-Volterra Models Nizar Ezroura M53 The Lotka-Volterra equations are a pair of coupled first-order ODEs that are used to describe the evolution of two elements under some mutual interaction pattern.
Lotka-Volterra Models Nizar Ezroura M53 The Lotka-Volterra equations are a pair of coupled first-order ODEs that are used to describe the evolution of two elements under some mutual interaction pattern.
Stability, dispersal and ecological networks. François Massol
 Stability, dispersal and ecological networks François Massol June 1 st 2015 General theme Evolutionary ecology of fluxes o Evolution & ecology of dispersal o Spatial structure, networks of populations
Stability, dispersal and ecological networks François Massol June 1 st 2015 General theme Evolutionary ecology of fluxes o Evolution & ecology of dispersal o Spatial structure, networks of populations
Section 5. Graphing Systems
 Section 5. Graphing Systems 5A. The Phase Plane 5A-1. Find the critical points of each of the following non-linear autonomous systems. x = x 2 y 2 x = 1 x + y a) b) y = x xy y = y + 2x 2 5A-2. Write each
Section 5. Graphing Systems 5A. The Phase Plane 5A-1. Find the critical points of each of the following non-linear autonomous systems. x = x 2 y 2 x = 1 x + y a) b) y = x xy y = y + 2x 2 5A-2. Write each
Chapter 6 Nonlinear Systems and Phenomena. Friday, November 2, 12
 Chapter 6 Nonlinear Systems and Phenomena 6.1 Stability and the Phase Plane We now move to nonlinear systems Begin with the first-order system for x(t) d dt x = f(x,t), x(0) = x 0 In particular, consider
Chapter 6 Nonlinear Systems and Phenomena 6.1 Stability and the Phase Plane We now move to nonlinear systems Begin with the first-order system for x(t) d dt x = f(x,t), x(0) = x 0 In particular, consider
DYNAMICS OF A PREDATOR-PREY INTERACTION IN CHEMOSTAT WITH VARIABLE YIELD
 Journal of Sustainability Science Management Volume 10 Number 2, December 2015: 16-23 ISSN: 1823-8556 Penerbit UMT DYNAMICS OF A PREDATOR-PREY INTERACTION IN CHEMOSTAT WITH VARIABLE YIELD SARKER MD SOHEL
Journal of Sustainability Science Management Volume 10 Number 2, December 2015: 16-23 ISSN: 1823-8556 Penerbit UMT DYNAMICS OF A PREDATOR-PREY INTERACTION IN CHEMOSTAT WITH VARIABLE YIELD SARKER MD SOHEL
NUMERICAL SIMULATION DYNAMICAL MODEL OF THREE-SPECIES FOOD CHAIN WITH LOTKA-VOLTERRA LINEAR FUNCTIONAL RESPONSE
 Journal of Sustainability Science and Management Volume 6 Number 1, June 2011: 44-50 ISSN: 1823-8556 Universiti Malaysia Terengganu Publisher NUMERICAL SIMULATION DYNAMICAL MODEL OF THREE-SPECIES FOOD
Journal of Sustainability Science and Management Volume 6 Number 1, June 2011: 44-50 ISSN: 1823-8556 Universiti Malaysia Terengganu Publisher NUMERICAL SIMULATION DYNAMICAL MODEL OF THREE-SPECIES FOOD
Modeling with differential equations
 Mathematical Modeling Lia Vas Modeling with differential equations When trying to predict the future value, one follows the following basic idea. Future value = present value + change. From this idea,
Mathematical Modeling Lia Vas Modeling with differential equations When trying to predict the future value, one follows the following basic idea. Future value = present value + change. From this idea,
MAT 22B - Lecture Notes
 MAT 22B - Lecture Notes 4 September 205 Solving Systems of ODE Last time we talked a bit about how systems of ODE arise and why they are nice for visualization. Now we'll talk about the basics of how to
MAT 22B - Lecture Notes 4 September 205 Solving Systems of ODE Last time we talked a bit about how systems of ODE arise and why they are nice for visualization. Now we'll talk about the basics of how to
We have two possible solutions (intersections of null-clines. dt = bv + muv = g(u, v). du = au nuv = f (u, v),
. du = au nuv = f (u, v),") Let us apply the approach presented above to the analysis of population dynamics models. 9. Lotka-Volterra predator-prey model: phase plane analysis. Earlier we introduced the system of equations for prey
Let us apply the approach presented above to the analysis of population dynamics models. 9. Lotka-Volterra predator-prey model: phase plane analysis. Earlier we introduced the system of equations for prey
8.1 Bifurcations of Equilibria
 1 81 Bifurcations of Equilibria Bifurcation theory studies qualitative changes in solutions as a parameter varies In general one could study the bifurcation theory of ODEs PDEs integro-differential equations
1 81 Bifurcations of Equilibria Bifurcation theory studies qualitative changes in solutions as a parameter varies In general one could study the bifurcation theory of ODEs PDEs integro-differential equations
Interactions. Yuan Gao. Spring Applied Mathematics University of Washington
 Interactions Yuan Gao Applied Mathematics University of Washington yuangao@uw.edu Spring 2015 1 / 27 Nonlinear System Consider the following coupled ODEs: dx = f (x, y). dt dy = g(x, y). dt In general,
Interactions Yuan Gao Applied Mathematics University of Washington yuangao@uw.edu Spring 2015 1 / 27 Nonlinear System Consider the following coupled ODEs: dx = f (x, y). dt dy = g(x, y). dt In general,
1 The pendulum equation
 Math 270 Honors ODE I Fall, 2008 Class notes # 5 A longer than usual homework assignment is at the end. The pendulum equation We now come to a particularly important example, the equation for an oscillating
Math 270 Honors ODE I Fall, 2008 Class notes # 5 A longer than usual homework assignment is at the end. The pendulum equation We now come to a particularly important example, the equation for an oscillating
Is chaos possible in 1d? - yes - no - I don t know. What is the long term behavior for the following system if x(0) = π/2?
 = π/2?") Is chaos possible in 1d? - yes - no - I don t know What is the long term behavior for the following system if x(0) = π/2? In the insect outbreak problem, what kind of bifurcation occurs at fixed value
Is chaos possible in 1d? - yes - no - I don t know What is the long term behavior for the following system if x(0) = π/2? In the insect outbreak problem, what kind of bifurcation occurs at fixed value
Discrete time dynamical systems (Review of rst part of Math 361, Winter 2001)
") Discrete time dynamical systems (Review of rst part of Math 36, Winter 2) Basic problem: x (t);; dynamic variables (e.g. population size of age class i at time t); dynamics given by a set of n equations
Discrete time dynamical systems (Review of rst part of Math 36, Winter 2) Basic problem: x (t);; dynamic variables (e.g. population size of age class i at time t); dynamics given by a set of n equations
Modeling the Immune System W9. Ordinary Differential Equations as Macroscopic Modeling Tool
 Modeling the Immune System W9 Ordinary Differential Equations as Macroscopic Modeling Tool 1 Lecture Notes for ODE Models We use the lecture notes Theoretical Fysiology 2006 by Rob de Boer, U. Utrecht
Modeling the Immune System W9 Ordinary Differential Equations as Macroscopic Modeling Tool 1 Lecture Notes for ODE Models We use the lecture notes Theoretical Fysiology 2006 by Rob de Boer, U. Utrecht
Nonlinear Autonomous Dynamical systems of two dimensions. Part A
 Nonlinear Autonomous Dynamical systems of two dimensions Part A Nonlinear Autonomous Dynamical systems of two dimensions x f ( x, y), x(0) x vector field y g( xy, ), y(0) y F ( f, g) 0 0 f, g are continuous
Nonlinear Autonomous Dynamical systems of two dimensions Part A Nonlinear Autonomous Dynamical systems of two dimensions x f ( x, y), x(0) x vector field y g( xy, ), y(0) y F ( f, g) 0 0 f, g are continuous
Construction of Lyapunov functions by validated computation
 Construction of Lyapunov functions by validated computation Nobito Yamamoto 1, Kaname Matsue 2, and Tomohiro Hiwaki 1 1 The University of Electro-Communications, Tokyo, Japan yamamoto@im.uec.ac.jp 2 The
Construction of Lyapunov functions by validated computation Nobito Yamamoto 1, Kaname Matsue 2, and Tomohiro Hiwaki 1 1 The University of Electro-Communications, Tokyo, Japan yamamoto@im.uec.ac.jp 2 The
MCE693/793: Analysis and Control of Nonlinear Systems
 MCE693/793: Analysis and Control of Nonlinear Systems Systems of Differential Equations Phase Plane Analysis Hanz Richter Mechanical Engineering Department Cleveland State University Systems of Nonlinear
MCE693/793: Analysis and Control of Nonlinear Systems Systems of Differential Equations Phase Plane Analysis Hanz Richter Mechanical Engineering Department Cleveland State University Systems of Nonlinear
MA 137 Calculus 1 with Life Science Application A First Look at Differential Equations (Section 4.1.2)
") MA 137 Calculus 1 with Life Science Application A First Look at Differential Equations (Section 4.1.2) Alberto Corso alberto.corso@uky.edu Department of Mathematics University of Kentucky October 12, 2015
MA 137 Calculus 1 with Life Science Application A First Look at Differential Equations (Section 4.1.2) Alberto Corso alberto.corso@uky.edu Department of Mathematics University of Kentucky October 12, 2015
Clearly the passage of an eigenvalue through to the positive real half plane leads to a qualitative change in the phase portrait, i.e.
 Bifurcations We have already seen how the loss of stiffness in a linear oscillator leads to instability. In a practical situation the stiffness may not degrade in a linear fashion, and instability may
Bifurcations We have already seen how the loss of stiffness in a linear oscillator leads to instability. In a practical situation the stiffness may not degrade in a linear fashion, and instability may
Harvesting Model for Fishery Resource with Reserve Area and Modified Effort Function
 Malaya J. Mat. 4(2)(2016) 255 262 Harvesting Model for Fishery Resource with Reserve Area and Modified Effort Function Bhanu Gupta and Amit Sharma P.G. Department of Mathematics, JC DAV College, Dasuya
Malaya J. Mat. 4(2)(2016) 255 262 Harvesting Model for Fishery Resource with Reserve Area and Modified Effort Function Bhanu Gupta and Amit Sharma P.G. Department of Mathematics, JC DAV College, Dasuya
Math 266: Phase Plane Portrait
 Math 266: Phase Plane Portrait Long Jin Purdue, Spring 2018 Review: Phase line for an autonomous equation For a single autonomous equation y = f (y) we used a phase line to illustrate the equilibrium solutions
Math 266: Phase Plane Portrait Long Jin Purdue, Spring 2018 Review: Phase line for an autonomous equation For a single autonomous equation y = f (y) we used a phase line to illustrate the equilibrium solutions
. For each initial condition y(0) = y 0, there exists a. unique solution. In fact, given any point (x, y), there is a unique curve through this point,
 = y 0, there exists a. unique solution. In fact, given any point (x, y), there is a unique curve through this point,") 1.2. Direction Fields: Graphical Representation of the ODE and its Solution Section Objective(s): Constructing Direction Fields. Interpreting Direction Fields. Definition 1.2.1. A first order ODE of the
1.2. Direction Fields: Graphical Representation of the ODE and its Solution Section Objective(s): Constructing Direction Fields. Interpreting Direction Fields. Definition 1.2.1. A first order ODE of the
System Control Engineering 0
 System Control Engineering 0 Koichi Hashimoto Graduate School of Information Sciences Text: Nonlinear Control Systems Analysis and Design, Wiley Author: Horacio J. Marquez Web: http://www.ic.is.tohoku.ac.jp/~koichi/system_control/
System Control Engineering 0 Koichi Hashimoto Graduate School of Information Sciences Text: Nonlinear Control Systems Analysis and Design, Wiley Author: Horacio J. Marquez Web: http://www.ic.is.tohoku.ac.jp/~koichi/system_control/
Solutions to Math 53 Math 53 Practice Final
 Solutions to Math 5 Math 5 Practice Final 20 points Consider the initial value problem y t 4yt = te t with y 0 = and y0 = 0 a 8 points Find the Laplace transform of the solution of this IVP b 8 points
Solutions to Math 5 Math 5 Practice Final 20 points Consider the initial value problem y t 4yt = te t with y 0 = and y0 = 0 a 8 points Find the Laplace transform of the solution of this IVP b 8 points
Dynamical Systems. August 13, 2013
 Dynamical Systems Joshua Wilde, revised by Isabel Tecu, Takeshi Suzuki and María José Boccardi August 13, 2013 Dynamical Systems are systems, described by one or more equations, that evolve over time.
Dynamical Systems Joshua Wilde, revised by Isabel Tecu, Takeshi Suzuki and María José Boccardi August 13, 2013 Dynamical Systems are systems, described by one or more equations, that evolve over time.
Solutions to Dynamical Systems 2010 exam. Each question is worth 25 marks.
 Solutions to Dynamical Systems exam Each question is worth marks [Unseen] Consider the following st order differential equation: dy dt Xy yy 4 a Find and classify all the fixed points of Hence draw the
Solutions to Dynamical Systems exam Each question is worth marks [Unseen] Consider the following st order differential equation: dy dt Xy yy 4 a Find and classify all the fixed points of Hence draw the
Systems of Ordinary Differential Equations
 Systems of Ordinary Differential Equations Scott A. McKinley October 22, 2013 In these notes, which replace the material in your textbook, we will learn a modern view of analyzing systems of differential
Systems of Ordinary Differential Equations Scott A. McKinley October 22, 2013 In these notes, which replace the material in your textbook, we will learn a modern view of analyzing systems of differential
Exam in TMA4195 Mathematical Modeling Solutions
 Norwegian University of Science and Technology Department of Mathematical Sciences Page of 9 Exam in TMA495 Mathematical Modeling 6..07 Solutions Problem a Here x, y are two populations varying with time
Norwegian University of Science and Technology Department of Mathematical Sciences Page of 9 Exam in TMA495 Mathematical Modeling 6..07 Solutions Problem a Here x, y are two populations varying with time
One Dimensional Dynamical Systems
 16 CHAPTER 2 One Dimensional Dynamical Systems We begin by analyzing some dynamical systems with one-dimensional phase spaces, and in particular their bifurcations. All equations in this Chapter are scalar
16 CHAPTER 2 One Dimensional Dynamical Systems We begin by analyzing some dynamical systems with one-dimensional phase spaces, and in particular their bifurcations. All equations in this Chapter are scalar
Topic 5: The Difference Equation
 Topic 5: The Difference Equation Yulei Luo Economics, HKU October 30, 2017 Luo, Y. (Economics, HKU) ME October 30, 2017 1 / 42 Discrete-time, Differences, and Difference Equations When time is taken to
Topic 5: The Difference Equation Yulei Luo Economics, HKU October 30, 2017 Luo, Y. (Economics, HKU) ME October 30, 2017 1 / 42 Discrete-time, Differences, and Difference Equations When time is taken to
Systems of Linear ODEs
 P a g e 1 Systems of Linear ODEs Systems of ordinary differential equations can be solved in much the same way as discrete dynamical systems if the differential equations are linear. We will focus here
P a g e 1 Systems of Linear ODEs Systems of ordinary differential equations can be solved in much the same way as discrete dynamical systems if the differential equations are linear. We will focus here
BIFURCATION PHENOMENA Lecture 1: Qualitative theory of planar ODEs
 BIFURCATION PHENOMENA Lecture 1: Qualitative theory of planar ODEs Yuri A. Kuznetsov August, 2010 Contents 1. Solutions and orbits. 2. Equilibria. 3. Periodic orbits and limit cycles. 4. Homoclinic orbits.
BIFURCATION PHENOMENA Lecture 1: Qualitative theory of planar ODEs Yuri A. Kuznetsov August, 2010 Contents 1. Solutions and orbits. 2. Equilibria. 3. Periodic orbits and limit cycles. 4. Homoclinic orbits.
M469, Fall 2010, Practice Problems for the Final
 M469 Fall 00 Practice Problems for the Final The final exam for M469 will be Friday December 0 3:00-5:00 pm in the usual classroom Blocker 60 The final will cover the following topics from nonlinear systems
M469 Fall 00 Practice Problems for the Final The final exam for M469 will be Friday December 0 3:00-5:00 pm in the usual classroom Blocker 60 The final will cover the following topics from nonlinear systems
AN EXTENDED ROSENZWEIG-MACARTHUR MODEL OF A TRITROPHIC FOOD CHAIN. Nicole Rocco
 AN EXTENDED ROSENZWEIG-MACARTHUR MODEL OF A TRITROPHIC FOOD CHAIN Nicole Rocco A Thesis Submitted to the University of North Carolina Wilmington in Partial Fulfillment of the Requirements for the Degree
AN EXTENDED ROSENZWEIG-MACARTHUR MODEL OF A TRITROPHIC FOOD CHAIN Nicole Rocco A Thesis Submitted to the University of North Carolina Wilmington in Partial Fulfillment of the Requirements for the Degree
Math 21: Final. Friday, 06/03/2011
 Math 21: Final Friday, 06/03/2011 Complete the following problems. You may use any result from class you like, but if you cite a theorem be sure to verify the hypotheses are satisfied. When finished hand
Math 21: Final Friday, 06/03/2011 Complete the following problems. You may use any result from class you like, but if you cite a theorem be sure to verify the hypotheses are satisfied. When finished hand
Department of Mathematics IIT Guwahati
 Stability of Linear Systems in R 2 Department of Mathematics IIT Guwahati A system of first order differential equations is called autonomous if the system can be written in the form dx 1 dt = g 1(x 1,
Stability of Linear Systems in R 2 Department of Mathematics IIT Guwahati A system of first order differential equations is called autonomous if the system can be written in the form dx 1 dt = g 1(x 1,
TWO DIMENSIONAL FLOWS. Lecture 5: Limit Cycles and Bifurcations
 TWO DIMENSIONAL FLOWS Lecture 5: Limit Cycles and Bifurcations 5. Limit cycles A limit cycle is an isolated closed trajectory [ isolated means that neighbouring trajectories are not closed] Fig. 5.1.1
TWO DIMENSIONAL FLOWS Lecture 5: Limit Cycles and Bifurcations 5. Limit cycles A limit cycle is an isolated closed trajectory [ isolated means that neighbouring trajectories are not closed] Fig. 5.1.1
SMA 208: Ordinary differential equations I
 SMA 208: Ordinary differential equations I First Order differential equations Lecturer: Dr. Philip Ngare (Contacts: pngare@uonbi.ac.ke, Tue 12-2 PM) School of Mathematics, University of Nairobi Feb 26,
SMA 208: Ordinary differential equations I First Order differential equations Lecturer: Dr. Philip Ngare (Contacts: pngare@uonbi.ac.ke, Tue 12-2 PM) School of Mathematics, University of Nairobi Feb 26,
E209A: Analysis and Control of Nonlinear Systems Problem Set 6 Solutions
 E9A: Analysis and Control of Nonlinear Systems Problem Set 6 Solutions Michael Vitus Gabe Hoffmann Stanford University Winter 7 Problem 1 The governing equations are: ẋ 1 = x 1 + x 1 x ẋ = x + x 3 Using
E9A: Analysis and Control of Nonlinear Systems Problem Set 6 Solutions Michael Vitus Gabe Hoffmann Stanford University Winter 7 Problem 1 The governing equations are: ẋ 1 = x 1 + x 1 x ẋ = x + x 3 Using
Math 1280 Notes 4 Last section revised, 1/31, 9:30 pm.
 1 competing species Math 1280 Notes 4 Last section revised, 1/31, 9:30 pm. This section and the next deal with the subject of population biology. You will already have seen examples of this. Most calculus
1 competing species Math 1280 Notes 4 Last section revised, 1/31, 9:30 pm. This section and the next deal with the subject of population biology. You will already have seen examples of this. Most calculus
CHALMERS, GÖTEBORGS UNIVERSITET. EXAM for DYNAMICAL SYSTEMS. COURSE CODES: TIF 155, FIM770GU, PhD
 CHALMERS, GÖTEBORGS UNIVERSITET EXAM for DYNAMICAL SYSTEMS COURSE CODES: TIF 155, FIM770GU, PhD Time: Place: Teachers: Allowed material: Not allowed: August 22, 2018, at 08 30 12 30 Johanneberg Jan Meibohm,
CHALMERS, GÖTEBORGS UNIVERSITET EXAM for DYNAMICAL SYSTEMS COURSE CODES: TIF 155, FIM770GU, PhD Time: Place: Teachers: Allowed material: Not allowed: August 22, 2018, at 08 30 12 30 Johanneberg Jan Meibohm,
ANSWERS Final Exam Math 250b, Section 2 (Professor J. M. Cushing), 15 May 2008 PART 1
, 15 May 2008 PART 1") ANSWERS Final Exam Math 50b, Section (Professor J. M. Cushing), 5 May 008 PART. (0 points) A bacterial population x grows exponentially according to the equation x 0 = rx, where r>0is the per unit rate
ANSWERS Final Exam Math 50b, Section (Professor J. M. Cushing), 5 May 008 PART. (0 points) A bacterial population x grows exponentially according to the equation x 0 = rx, where r>0is the per unit rate
Mathematical modeling of Fish Resources Harvesting with. Predator at Maximum Sustainable Yield
 Mathematical modeling of Fish Resources Harvesting with Predator at Maximum Sustainable Yield KinfeHailemariamHntsa Department of Mathematics, Aksum University, PO box 1010, Axum, Ethiopia Abstract ZebebeTekaMengesha
Mathematical modeling of Fish Resources Harvesting with Predator at Maximum Sustainable Yield KinfeHailemariamHntsa Department of Mathematics, Aksum University, PO box 1010, Axum, Ethiopia Abstract ZebebeTekaMengesha
Final Exam December 20, 2011
 Final Exam December 20, 2011 Math 420 - Ordinary Differential Equations No credit will be given for answers without mathematical or logical justification. Simplify answers as much as possible. Leave solutions
Final Exam December 20, 2011 Math 420 - Ordinary Differential Equations No credit will be given for answers without mathematical or logical justification. Simplify answers as much as possible. Leave solutions
Andronov Hopf and Bautin bifurcation in a tritrophic food chain model with Holling functional response types IV and II
 Electronic Journal of Qualitative Theory of Differential Equations 018 No 78 1 7; https://doiorg/10143/ejqtde018178 wwwmathu-szegedhu/ejqtde/ Andronov Hopf and Bautin bifurcation in a tritrophic food chain
Electronic Journal of Qualitative Theory of Differential Equations 018 No 78 1 7; https://doiorg/10143/ejqtde018178 wwwmathu-szegedhu/ejqtde/ Andronov Hopf and Bautin bifurcation in a tritrophic food chain
EE222 - Spring 16 - Lecture 2 Notes 1
 EE222 - Spring 16 - Lecture 2 Notes 1 Murat Arcak January 21 2016 1 Licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International License. Essentially Nonlinear Phenomena Continued
EE222 - Spring 16 - Lecture 2 Notes 1 Murat Arcak January 21 2016 1 Licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International License. Essentially Nonlinear Phenomena Continued
Dynamical Systems: Ecological Modeling
 Dynamical Systems: Ecological Modeling G Söderbacka Abstract Ecological modeling is becoming increasingly more important for modern engineers. The mathematical language of dynamical systems has been applied
Dynamical Systems: Ecological Modeling G Söderbacka Abstract Ecological modeling is becoming increasingly more important for modern engineers. The mathematical language of dynamical systems has been applied
Lecture 38. Almost Linear Systems
 Math 245 - Mathematics of Physics and Engineering I Lecture 38. Almost Linear Systems April 20, 2012 Konstantin Zuev (USC) Math 245, Lecture 38 April 20, 2012 1 / 11 Agenda Stability Properties of Linear
Math 245 - Mathematics of Physics and Engineering I Lecture 38. Almost Linear Systems April 20, 2012 Konstantin Zuev (USC) Math 245, Lecture 38 April 20, 2012 1 / 11 Agenda Stability Properties of Linear
FIRST-ORDER SYSTEMS OF ORDINARY DIFFERENTIAL EQUATIONS III: Autonomous Planar Systems David Levermore Department of Mathematics University of Maryland
 FIRST-ORDER SYSTEMS OF ORDINARY DIFFERENTIAL EQUATIONS III: Autonomous Planar Systems David Levermore Department of Mathematics University of Maryland 4 May 2012 Because the presentation of this material
FIRST-ORDER SYSTEMS OF ORDINARY DIFFERENTIAL EQUATIONS III: Autonomous Planar Systems David Levermore Department of Mathematics University of Maryland 4 May 2012 Because the presentation of this material
Solutions for B8b (Nonlinear Systems) Fake Past Exam (TT 10)
 Fake Past Exam (TT 10)") Solutions for B8b (Nonlinear Systems) Fake Past Exam (TT 10) Mason A. Porter 15/05/2010 1 Question 1 i. (6 points) Define a saddle-node bifurcation and show that the first order system dx dt = r x e x
Solutions for B8b (Nonlinear Systems) Fake Past Exam (TT 10) Mason A. Porter 15/05/2010 1 Question 1 i. (6 points) Define a saddle-node bifurcation and show that the first order system dx dt = r x e x
Predator-prey interactions
 Predator-prey interactions Key concepts ˆ Predator-prey cycles ˆ Phase portraits ˆ Stabilizing mechanisms ˆ Linear stability analysis ˆ Functional responses ˆ The paradox of enrichment Predator-prey cycles
Predator-prey interactions Key concepts ˆ Predator-prey cycles ˆ Phase portraits ˆ Stabilizing mechanisms ˆ Linear stability analysis ˆ Functional responses ˆ The paradox of enrichment Predator-prey cycles
Nonlinear Autonomous Systems of Differential
 Chapter 4 Nonlinear Autonomous Systems of Differential Equations 4.0 The Phase Plane: Linear Systems 4.0.1 Introduction Consider a system of the form x = A(x), (4.0.1) where A is independent of t. Such
Chapter 4 Nonlinear Autonomous Systems of Differential Equations 4.0 The Phase Plane: Linear Systems 4.0.1 Introduction Consider a system of the form x = A(x), (4.0.1) where A is independent of t. Such
Physics: spring-mass system, planet motion, pendulum. Biology: ecology problem, neural conduction, epidemics
 Applications of nonlinear ODE systems: Physics: spring-mass system, planet motion, pendulum Chemistry: mixing problems, chemical reactions Biology: ecology problem, neural conduction, epidemics Economy:
Applications of nonlinear ODE systems: Physics: spring-mass system, planet motion, pendulum Chemistry: mixing problems, chemical reactions Biology: ecology problem, neural conduction, epidemics Economy:
CDS 101/110a: Lecture 2.1 Dynamic Behavior
 CDS 11/11a: Lecture 2.1 Dynamic Behavior Richard M. Murray 6 October 28 Goals: Learn to use phase portraits to visualize behavior of dynamical systems Understand different types of stability for an equilibrium
CDS 11/11a: Lecture 2.1 Dynamic Behavior Richard M. Murray 6 October 28 Goals: Learn to use phase portraits to visualize behavior of dynamical systems Understand different types of stability for an equilibrium
Calculus for the Life Sciences II Assignment 6 solutions. f(x, y) = 3π 3 cos 2x + 2 sin 3y
 = 3π 3 cos 2x + 2 sin 3y") Calculus for the Life Sciences II Assignment 6 solutions Find the tangent plane to the graph of the function at the point (0, π f(x, y = 3π 3 cos 2x + 2 sin 3y Solution: The tangent plane of f at a point
Calculus for the Life Sciences II Assignment 6 solutions Find the tangent plane to the graph of the function at the point (0, π f(x, y = 3π 3 cos 2x + 2 sin 3y Solution: The tangent plane of f at a point
ENGI 9420 Lecture Notes 4 - Stability Analysis Page Stability Analysis for Non-linear Ordinary Differential Equations
 ENGI 940 Lecture Notes 4 - Stability Analysis Page 4.01 4. Stability Analysis for Non-linear Ordinary Differential Equations A pair of simultaneous first order homogeneous linear ordinary differential
ENGI 940 Lecture Notes 4 - Stability Analysis Page 4.01 4. Stability Analysis for Non-linear Ordinary Differential Equations A pair of simultaneous first order homogeneous linear ordinary differential
DYNAMICS IN 3-SPECIES PREDATOR-PREY MODELS WITH TIME DELAYS. Wei Feng
 DISCRETE AND CONTINUOUS Website: www.aimsciences.org DYNAMICAL SYSTEMS SUPPLEMENT 7 pp. 36 37 DYNAMICS IN 3-SPECIES PREDATOR-PREY MODELS WITH TIME DELAYS Wei Feng Mathematics and Statistics Department
DISCRETE AND CONTINUOUS Website: www.aimsciences.org DYNAMICAL SYSTEMS SUPPLEMENT 7 pp. 36 37 DYNAMICS IN 3-SPECIES PREDATOR-PREY MODELS WITH TIME DELAYS Wei Feng Mathematics and Statistics Department
A plane autonomous system is a pair of simultaneous first-order differential equations,
 Chapter 11 Phase-Plane Techniques 11.1 Plane Autonomous Systems A plane autonomous system is a pair of simultaneous first-order differential equations, ẋ = f(x, y), ẏ = g(x, y). This system has an equilibrium
Chapter 11 Phase-Plane Techniques 11.1 Plane Autonomous Systems A plane autonomous system is a pair of simultaneous first-order differential equations, ẋ = f(x, y), ẏ = g(x, y). This system has an equilibrium
B5.6 Nonlinear Systems
 B5.6 Nonlinear Systems 4. Bifurcations Alain Goriely 2018 Mathematical Institute, University of Oxford Table of contents 1. Local bifurcations for vector fields 1.1 The problem 1.2 The extended centre
B5.6 Nonlinear Systems 4. Bifurcations Alain Goriely 2018 Mathematical Institute, University of Oxford Table of contents 1. Local bifurcations for vector fields 1.1 The problem 1.2 The extended centre
CDS 101 Precourse Phase Plane Analysis and Stability
 CDS 101 Precourse Phase Plane Analysis and Stability Melvin Leok Control and Dynamical Systems California Institute of Technology Pasadena, CA, 26 September, 2002. mleok@cds.caltech.edu http://www.cds.caltech.edu/
CDS 101 Precourse Phase Plane Analysis and Stability Melvin Leok Control and Dynamical Systems California Institute of Technology Pasadena, CA, 26 September, 2002. mleok@cds.caltech.edu http://www.cds.caltech.edu/
Stability Analysis of Predator- Prey Models via the Liapunov Method
 Stability Analysis of Predator- Prey Models via the Liapunov Method Gatto, M. and Rinaldi, S. IIASA Research Memorandum October 1975 Gatto, M. and Rinaldi, S. (1975) Stability Analysis of Predator-Prey
Stability Analysis of Predator- Prey Models via the Liapunov Method Gatto, M. and Rinaldi, S. IIASA Research Memorandum October 1975 Gatto, M. and Rinaldi, S. (1975) Stability Analysis of Predator-Prey
Introduction to the Phase Plane
 Introduction to the Phase Plane June, 06 The Phase Line A single first order differential equation of the form = f(y) () makes no mention of t in the function f. Such a differential equation is called
Introduction to the Phase Plane June, 06 The Phase Line A single first order differential equation of the form = f(y) () makes no mention of t in the function f. Such a differential equation is called