Nonlinear Autonomous Systems of Differential
|
|
|
- Jasmine Wilson
- 5 years ago
- Views:
Transcription
1 Chapter 4 Nonlinear Autonomous Systems of Differential Equations 4.0 The Phase Plane: Linear Systems Introduction Consider a system of the form x = A(x), (4.0.1) where A is independent of t. Such a system is called an autonomous system.
2 286 Chapter 4. Below we consider the case where n = 2, i.e., dx dt = F(x,y) = A (1,1) x + A (1,2) y dy dt = G(x,y) = A (2,1) x + A (2,2) y. Suppose F and G are continuous and have continuous partial derivatives in some region D in the xy-plane (called the phase plane for the system). Then by the existence and uniqueness theorem, given any t 0 R and any point (x 0,y 0 ) D, there is a unique solution x = ϕ(t), y = ψ(t), (4.0.2) defined on an interval containing t 0, that satisfies the initial conditions ϕ(t 0 ) = x 0, ψ(t 0 ) = y 0. Note that (4.0.2) describe a parameterized curve in the phase plane.
3 4.0. The Phase Plane: Linear Systems 287 Phase Plane gives a graphical view on the movement of differential equation s solution without actually solving the equations. Such a curve is called a trajectory of the system. A plot that shows a representative sample of trajectories is called a phase portrait of the system.
4 288 Chapter 4. Definition A solution, (ϕ(t), ψ(t)), of equation x = A(x), is called a critical point (equilibrium solution) if it satisfies: x dx = 0. equivalent to dt = dy dt = 0. Note that tangent vectors to a trajectory is given by ( ϕ (t),ψ (t) ) = ( F(ϕ(t),ψ(t)),G(ϕ(t),ψ(t)) ). We can visualize the tangent vectors by evaluating ( F(x,y),G(x,y) ) at a large number of points in D and plotting the resulting vectors. The collection of all such tangent vectors is called the direction field of the system. The phase portrait various with the nature of the eigenvalues of A.
5 4.0. The Phase Plane: Linear Systems 289 Case I: Real Unequal Eigenvalues of the Same Sign The general solution of equation is: x = A(x), x = c 1 ξ (1) e r 1t + c 2 ξ (2) e r 2t where r 1 and r 2 are either both positive or both negative. Suppose first that r 1 < r 2 < 0, we re-write the above equation as: x = e r 2t [c 1 ξ (1) e (r 1 r 2 )t + c 2 ξ (2) ] Thus, as t, the trajectory not only approaches the origin, it also tends toward the line through ξ (2). All solutions approach the critical point tangent to ξ (2) except for those solutions that start exactly on the line through ξ (1).




 The phase")
6 290 Chapter 4. This type of critical point is called a node or a nodal sink. Figure 4.1: A node: r 1 < r 2 < 0. (a) The phase plane. (b) x 1 versus t

 e r 1t + c 2 ξ (2) e r 2t WLOG, assume r 2 <")
 and ξ (2) are shown below. Figure 4.")
 The phase plane. (b) x 1 versus t.")
 (ξ (2) ), then x ( 0) as t.")
7 4.0. The Phase Plane: Linear Systems 291 Case II: Real Eigenvalues of Opposite Sign Again, the general solution of equation is: x = A(x), x = c 1 ξ (1) e r 1t + c 2 ξ (2) e r 2t WLOG, assume r 2 < 0 < r 1. (4.0.3) Suppose that the eigenvectors ξ (1) and ξ (2) are shown below. Figure 4.2: A saddle point: r 1 > 0, r 2 < 0. (a) The phase plane. (b) x 1 versus t. If the solution starts at an initial point on the line through ξ (1) (ξ (2) ), then x ( 0) as t. As positive exponential is the dominant term in
8 292 Chapter 4. equation (4.0.3), eventually all these solutions approach infinity asymptotic to the line determined by the eigenvector ξ (1) corresponding to the positive eigenvalue. The only solutions that approach the critical point at the origin are those that start precisely on the line determined by ξ (2). The origin is called a saddle point in this case.
9 4.0. The Phase Plane: Linear Systems 293 Case III: Equal Eigenvalues Consider eigenvalue is negative. (a) Two independent eigenvectors The general solution of equation is: x = A(x), x = c 1 ξ (1) e rt + c 2 ξ (2) e rt (4.0.4) Obviously, the ratio x 2 /x 1 is independent of t, but depends on the components of ξ (1) and ξ (2). The critical point is called a proper node (star point).
 One independent eigenvector is: The general solution of equation x = A(x), x = c 1 ξe rt + c 2 (ξte rt + ηe rt ), (4.0.5) where ξ is the eigenvector and η is the generalized eigenvector.")
10 294 Chapter 4. Figure 4.3: A proper node, two independent eigenvectors: r 1 = r 2 < 0. (a) The phase plane. (b) x 1 versus t. (b) One independent eigenvector is: The general solution of equation x = A(x), x = c 1 ξe rt + c 2 (ξte rt + ηe rt ), (4.0.5) where ξ is the eigenvector and η is the generalized eigenvector. For large either positive or negative value of t, c 2 ξte rt is dominant, even if c 2 =0, the solution x = c 1 ξe rt lies on the line. Thus, each trajectory is asymptotic to a line
11 4.0. The Phase Plane: Linear Systems 295 parallel to ξ. The vector (c 1 ξ + c 2 η) + c 2 ξt determines the direction of x.
12 296 Chapter 4. Sketch 1. Draw the line (c 1 ξ +c 2 η)+c 2 ξt and note the direction of increasing t on this line. 2. The trajectory passes through the point c 1 ξ+ c 2 η when t = As t increase, the direction increase follows the directions of increasing t on the line, but the magnitude of x rapidly decreases and approach to zero. 4. As t decrease toward, the magnitude of x approaches infinity. Notice If r > 0, the trajectories are traversed in the outward direction. In this case, the critical point is called an improper or degenerate node.


 x 1 versus t.")


13 4.0. The Phase Plane: Linear Systems 297 Figure 4.4: An improper node, one independent eigenvector; r 1 = r 2 < 0. (a) The phase plane. (b) x 1 versus t. (c) The phase plane. Case IV: Complex Eigenvalues Suppose that the eigenvalues are λ ± iµ, where both λ and µ are real, λ 0 and µ > 0. By simple calculation, we notice that ( ) λ µ A = µ λ
14 298 Chapter 4. The system is typified by: ( ) x λ µ = x (4.0.6) µ λ We introduce the polar coordinates r,θ given by r 2 = x x2 2, tan θ = x 2/x 1 (4.0.7) By differentiating these equations we obtain rr = x 1 x 1 +x 2x 2, (sec2 θ)θ = (x 1 x 2 x 2x 1 )/x2 1. (4.0.8) Substituting from equation (4.0.6) in the equation (4.0.8), we find that where c is a constant. r = λr r = ce λt
15 4.0. The Phase Plane: Linear Systems 299 Similarly, substituting from equation ( ) x λ µ = x µ λ in the equation θ = (x 1 x 2 x 2x 1 )/x2 1 and using the fact that sec 2 θ = tan 2 θ+1 = r2, and hence θ = µ θ = µt + θ 0 (4.0.9) As µ > 0, θ decreases as t increases, and the direction of motion on a trajectory is clockwise. As t, r 0 if λ < 0 and r if λ > 0. The trajectories are spirals, which approach from the origin depending on the sign of λ. The critical point is called a spiral point. x 2 1

 λ < 0, the phase plane. (b) λ < 0, x 1 versus t. (c) λ > 0, the phase plane.")
16 300 Chapter 4. Notice: The trajectories are always spirals if λ 0. They are directed inward or outward respectively, depending on whether λ is negative or positive. Figure 4.5: A spiral point; r 1 = λ + iµ, r 2 = λ iµ. (a) λ < 0, the phase plane. (b) λ < 0, x 1 versus t. (c) λ > 0, the phase plane. (d) λ > 0, x 1 versus t.
 ( x y Look at the point (0,1) on the positive y-axis. dx dy = b, = d, if both b and d are negative, dt dt the trajectories move down and into the second quadrant.")
17 4.0. The Phase Plane: Linear Systems 301 Example Consider dx dt dy = dt Figure 4.6: A spiral point; r = λ ± iµ with λ < 0. ( a b c d ) ( x y Look at the point (0,1) on the positive y-axis. dx dy = b, = d, if both b and d are negative, dt dt the trajectories move down and into the second quadrant. If λ < 0, the trajectories must be inward-pointing spirals. )
18 302 Chapter 4. Case V: Pure Imaginary Eigenvalues In this case λ = 0 and the system become: ( ) x 0 µ = x (4.0.10) µ 0 with eigenvalues ±iµ. It is easy to proof that r = c, θ = µt + θ 0. where both c and θ 0 are constants. Thus, the trajectories are circles with center at the origin, that are traversed clockwise (anticlockwise) if µ > 0 (µ < 0). A complete circuit about the origin is made in a time interval of length 2π/µ, so all solutions are periodic with period 2π/µ. The critical point is called a center. In general, when the eigenvalues are pure imaginary, it is possible to show that the trajectories are ellipses centered at the origin.
19 4.0. The Phase Plane: Linear Systems 303 A typical situation is shown in Figure 4.7, which also shows some typical graphs of x 1 versus t. Figure 4.7: A center; r 1 = iµ, r 2 = iµ. (a) The phase plane. (b) x 1 versus t. According to these five cases, we can make several observations: 1 When t, each trajectory either approaches infinity, approaches the critical point x = 0, or repeatedly traverses a closed curve, corresponding to a periodic solution, that surrounds the critical point.
20 304 Chapter 4. 2 Through each point (x 0,y 0 ) in the phase plane there is only one trajectory; thus the trajectories do not cross each other. Do not be misled by the figures, in which it sometimes appears that many trajectories (actually, only one) pass through the critical point x = 0. The other solutions that appear to pass through the origin actually only approach this point as t or.
21 4.0. The Phase Plane: Linear Systems The set of all trajectories is either: (a) All trajectories approach the critical point x = 0 as t. This is the case if the eigenvalues are negative (real part). The origin is either a nodal or a spiral sink. (b) All trajectories remain bounded but do not approach the origin as t. This is the case if the eigenvalues are pure imaginary. (The origin is a center) (c) Some trajectories, and possibly all trajectories except x = 0, tend to infinity as t. This is the case if at least one of the eigenvalues is positive (real part). The origin is either a nodal source, a spiral source, or a saddle point.
22 306 Chapter 4. Stability and Instability. x = f(x) (4.0.11) In the following definitions, we use the notation x to designate the length, or magnitude, of the vector x. The points, if any, where f(x) = 0 are called critical points of the autonomous system. x 0 is said to be stable if, given any ǫ > 0, there is a δ > 0 such that every solution x = φ(t) of the system, which at t = 0 satisfies φ(0) x 0 < δ (4.0.12) exists for all positive t and satisfies for all t 0. φ(t) x 0 < ǫ (4.0.13)

 Stability If all solutions that start sufficiently close to x")


23 4.0. The Phase Plane: Linear Systems 307 This is illustrated geometrically in Figures 4.8a and 4.8b. Figure 4.8: (a) Asymptotic stability. (b) Stability If all solutions that start sufficiently close to x 0, then it stays close to x 0. Note that in Figure 4.8a the trajectory is within the circle x x 0 = δ at t = 0 and, while it soon passes outside of this circle, it remains within the circle x x 0 = ǫ for all t 0. However, the trajectory of the solution does not have to approach the critical point x 0 as t, as illustrated in Figure 4.8b.
24 308 Chapter 4. A critical point that is not stable is said to be unstable. A critical point x 0 is said to be asymptotically stable if it is stable and if there exists a δ 0, with 0 < δ 0 < δ, such that if a solution x = φ(t) satisfies φ(0) x 0 < δ 0, (4.0.14) then lim φ(t) = t x0. (4.0.15) Thus trajectories that start sufficiently close to x 0 must not only stay close but must eventually approach x 0 as t. This is the case for the trajectory in Figure 4.8a but not for the one in Figure 4.8b. Note that asymptotic stability is a stronger property than stability. (4.0.15) is an essential feature of asymptotic stability, does not by itself imply even ordinary stability.
25 4.0. The Phase Plane: Linear Systems 309 Indeed, examples can be constructed in which all of the trajectories approach x 0 as t, but for which x 0 is not a stable critical point. Geometrically, all that is needed is a family of trajectories having members that start arbitrarily close to x 0, then depart an arbitrarily large distance before eventually approaching x 0 as t.
26 310 Chapter 4. In the undamped case, if the mass is displaced slightly from its lower equilibrium position, it will oscillate indefinitely with constant amplitude about the equilibrium position. This type of motion is stable, but not asymptotically stable. In general, undamped motion is impossible to achieve experimentally because the slightest degree of air resistance or friction at the point of support will eventually cause the pendulum to approach its rest position. Figure 4.9: Qualitative motion of a pendulum. (a) With air resistance. (b) With/without air resistance. (c) Without air resistance.
27 4.0. The Phase Plane: Linear Systems 311 Determination of Trajectories The trajectories of a two-dimensional autonomous system can sometimes be found by solving a related first order differential equation. From dx/dt = F(x,y), dy/dt = G(x,y), we have dy dx = dy/dt dx/dt = G(x,y) F(x,y). (4.0.16) which is a first order equation in the variables x and y. Observe that such a reduction is not usually possible if F and G depend also on t. If Equation (4.0.16) can be solved and if we write solutions (implicitly) in the form H(x, y) = c, (4.0.17) then Equation (4.0.17) is an equation for the trajectories of the system (4.0.16). In other words, the trajectories lie on the level curves of H(x,y).
28 312 Chapter 4. There is no general way of solving Equation (4.0.16) to obtain the function H, so this approach is applicable only in special cases.
29 4.0. The Phase Plane: Linear Systems 313 Example Find the trajectories of the system dx/dt = y, dy/dt = x. (4.0.18) In this case, Equation (4.0.16) becomes dy dx = x y. (4.0.19) This equation is separable since it can be written as ydy = xdx, and its solutions are given by H(x,y) = y 2 x 2 = c, (4.0.20) where c is arbitrary. Therefore the trajectories of the system (4.0.18) are the hyperbolas shown in Figure The direction of motion on the trajectories can be inferred from the fact that both dx/dt and dy/dt are positive in the first quadrant. The only critical point is the saddle point at the origin. Actually, the solution is: x = c 1 e t + c 2 e t, y = c 1 e t c 2 e t.


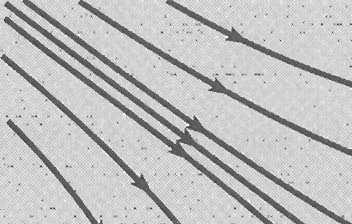
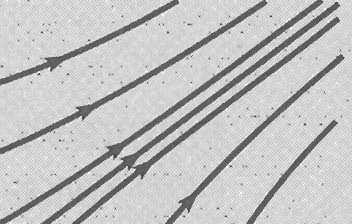


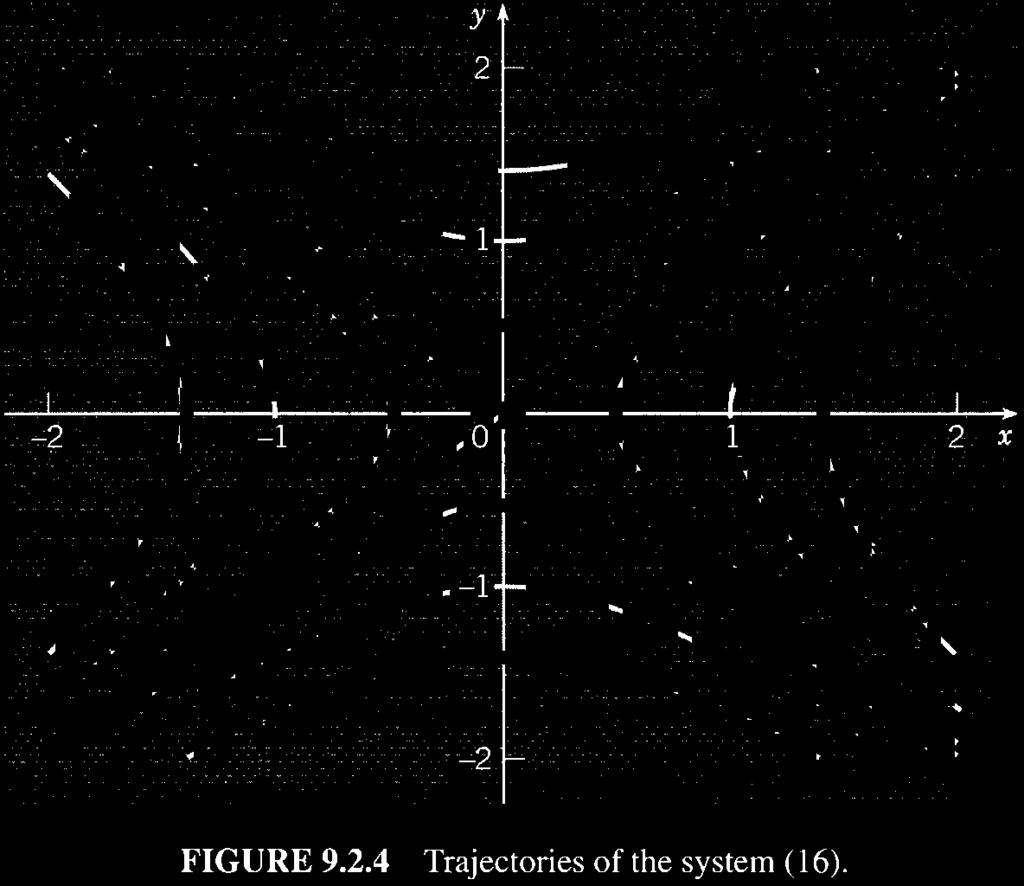
30 314 Chapter 4. Figure 4.10: Trajectories of the system.
31 4.0. The Phase Plane: Linear Systems 315 Example Find the trajectories of the system dx dt = 4 2y, dy dt = 12 3x2. (4.0.21) From the equations 4 2y = 0, 12 3x 2 = 0 The critical points are (-2, 2) and (2, 2). Based on the given system, we have dy dx = 12 3x2 4 2y. (4.0.22) Separating the variables and integrating, solutions satisfy H(x,y) = 4y y 2 12x + x 3 = c, (4.0.23) where c is an arbitrary constant. The direction of motion on the trajectories can be determined by drawing a direction field for the system (4.0.21), or by evaluating dx/dt and dy/dt at one or two selected points.
 is a saddle point while the point")
, the methods of")
32 316 Chapter 4. Figure 4.11: Trajectories of the system. From Figure 4.11 you can see that the critical point (2, 2) is a saddle point while the point (-2, 2) is a center. Observe that one trajectory leaves the saddle point (at t = ), the methods of loops around the center, and returns to the saddle point (at t = + ).
33 4.1. Almost Linear Systems Almost Linear Systems x = Ax. (4.1.1) Recall that we required deta 0, so that x = 0 is the only critical point. Theorem The critical point x = 0 of the linear system dx/dt = F(x,y), dy/dt = G(x,y), is asymptotically stable if the eigenvalues r 1,r 2 are negative (real part); stable, but not asymptotically stable, if r 1 and r 2 are pure imaginary; unstable if r 1 and r 2 are real and either is positive (real part). Thus, the eigenvalues r 1, r 2 of A determine the type of critical point at x = 0 and its stability characteristics.
34 318 Chapter 4. When the system arises in some applied field, matrix A usually result from the measurements of certain physical quantities. Such measurements are often subject to small uncertainties, so it is of interest to investigate whether small changes in the coefficients can affect the stability or instability of a critical point and/or significantly alter the pattern of trajectories. Recall that the eigenvalues r 1, r 2 are the roots of the polynomial equation det(a ri) = 0. (4.1.2) It is possible to show that small perturbations in some or all the coefficients are reflected in small perturbations in the eigenvalues. The most sensitive situation occurs when r 1 = iµ, and r 2 = iµ, that is, when the critical point is a center and the trajectories are closed curves surrounding it.
35 4.1. Almost Linear Systems 319 If a slight change is made in the coefficients, then the eigenvalues r 1 and r 2 will take on new values r 1 = λ + iµ and r 2 = λ iµ, where λ is small in magnitude and µ = µ (see Figure 4.12). Figure 4.12: Schematic perturbation of r 1 = iµ, r 2 = iµ. If λ = 0, then the trajectories of the perturbed system become spirals. The system is asymptotically stable (unstable) if λ < 0 (> 0). Thus, small perturbations in the coefficients may well change the stability of the system and may alter radically the pattern of trajectories in the phase plane.
36 320 Chapter 4. If the eigenvalues r 1 = r 2, the critical point is a node. Small perturbations in the coefficients will cause r 1 r 2. If the separated roots are real, then the critical point of the perturbed system remains a node, but if the separated roots are complex conjugates, then the critical point becomes a spiral point. These two possibilities are shown schematically in Figure Figure 4.13: Schematic perturbation of r 1 = r 2 In this case the stability of the system is not affected by small perturbations in the coefficients, but the trajectories may be altered considerably.
37 4.1. Almost Linear Systems 321 In all other cases the stability of the system is not changed, nor is the type of critical point altered, by sufficiently small perturbations in the coefficients of the system. For example, if r 1 < r 2 < 0, then a small change in the coefficients will not change the sign of r 1 and r 2 nor allow them to be equal. The critical point remains an asymptotically stable node.
38 322 Chapter 4. For a nonlinear two-dimensional autonomous system x = f(x). (4.1.3) Our main object is to investigate the behavior of trajectories of the system (4.1.3) near a critical point x 0. Method: approximate the nonlinear system by an appropriate linear system. WLOG, we choose the critical point to be the origin as if x 0 0, we substitute u = x x 0. Then u will satisfy an autonomous system with a critical point at the origin.
39 4.1. Almost Linear Systems 323 Suppose that x = Ax + g(x), (4.1.4) and that x = 0 is an isolated critical point. I.e., there is some circle about the origin within which there are no other critical points. We assume that deta 0, so that x = 0 is also an isolated critical point of the linear system x = Ax.
40 324 Chapter 4. For the nonlinear system x = Ax + g(x), to be close to the linear system x = Ax we must assume that g(x) is small. Here, we assume that the components of g C 1 and g(x) / x 0 as x 0; (4.1.5) Such a system is called an almost linear system in the neighborhood of the critical point x = 0. Here, we let x T = (x,y) and r = x. Also, if g T (x) = (g 1 (x,y),g 2 (x,y)), then we have g 1 (x,y) g 0, 2 (x,y) 0 as r 0. r r (4.1.6)
41 4.1. Almost Linear Systems 325 Example Determine whether the system ( ) ( ) ( ) ( x 1 0 x x = + 2 xy y y 0.75xy 0.25y 2 (4.1.7) is almost linear in the neighborhood of the origin. ) Observe that (0, 0) is a critical point, and deta 0. The other critical points are (0, 2), (1, 0), and (0.5, 0.5); consequently, the origin is an isolated critical point. Here, we let x = r cosδ, y = r sin δ and g 1 (x,y) r as r 0. = x2 xy = r2 cos 2 δ r 2 sin δ cos δ r r = r(cos 2 δ + sin δ cos δ) 0 In a similar way, it can be shown that g 2 (x,y)/r 0 as r 0. Hence the system is almost linear near the origin.
42 326 Chapter 4. Example The motion of a pendulum is described by the system dx dt = y, dy dt = ω2 sinx γy. (4.1.8) The critical points are (0, 0), (±π, 0), (±2π, 0),..., so the origin is an isolated critical point of this system. Show that the system is almost linear near the origin. Solution To compare it with x = Ax + g(x), we must rewrite the given system so that the linear and nonlinear terms are clearly identified. If we write sin x = x + (sin x x) and substitute this expression in the second of Equation (4.1.8),
43 4.1. Almost Linear Systems 327 we obtain the equivalent system ( ) ( )( ( ) x 0 1 x = ) ω y ω γ y sinx x (4.1.9) On comparing it with x = Ax + g(x), we see that g 1 (x,y) = 0 and g 2 (x,y) = ω 2 (sin x x). From the Taylor series for sinx, we know that sin x x behaves like x 3 /3! = (r 3 cos 3 δ)/3! when x is small. Consequently, (sinx x)/r 0 as r 0. Thus the conditions (4.1.6) are satisfied and the system is almost linear near the origin.
44 328 Chapter 4. Let us now return to the general nonlinear system x = f(x), which we write in the scalar form x = F(x,y), y = G(x,y). (4.1.10) The system (4.1.10) is almost linear in the neighborhood of a critical point (x 0,y 0 ) whenever the functions F and G have continuous partial derivatives up to order two. To show this, use Taylor expansions about the point (x 0,y 0 ) to write F(x,y) and G(x,y) in the form F(x,y) = F(x 0,y 0 ) + F x (x 0,y 0 )(x x 0 ) +F y (x 0,y 0 )(y y 0 ) + η 1 (x,y), G(x,y) = G(x 0,y 0 ) + G x (x 0,y 0 )(x x 0 ) +G y (x 0,y 0 )(y y 0 ) + η 2 (x,y), where η 1 (x,y)/[(x x 0 ) 2 + (y y 0 ) 2 ] 1/2 0 as (x,y) (x 0,y 0 ), and similarly for η 2.
45 4.1. Almost Linear Systems 329 Note that F(x 0,y 0 ) = G(x 0,y 0 ) = 0, and that dx/dt = d(x x 0 )/dt and dy/dt = d(y y 0 )/dt. Then the system (4.1.10) reduces to d dt ( x x0 y y 0 ) = ( )( ) Fx (x 0, y 0 ) F y (x 0,y 0 ) x x0 G x (x 0, y 0 ) G y (x 0,y 0 ) y y ( ) 0 η1 (x,y) + (4.1.11) η 2 (x,y) or, in vector notation, du dt = df dx (x0 )u + η(x), (4.1.12) where u = (x x 0,y y 0 ) T and η = (η 1,η 2 ) T. (1) if the functions F and G are twice differentiable, then the system is almost linear and it is unnecessary to resort to the limiting process. (2) the linear system that approximates the nonlinear system near (x 0,y 0 ) is given by the linear part of Equations (4.1.11) or (4.1.12),
46 330 Chapter 4. d dt i.e., ( u1 u 2 ) = ( Fx (x 0,y 0 ) F y (x 0,y 0 ) G x (x 0,y 0 ) G y (x 0,y 0 ) where u 1 = x x 0 and u 2 = y y 0. )( u1 u 2 ), (4.1.13) Above equation provides a simple and general method for finding the linear system corresponding to an almost linear system near a given critical point.
47 4.1. Almost Linear Systems 331 Example Use ( ) ( )( ) d u1 Fx (x = 0,y 0 ) F y (x 0,y 0 ) u1, dt G x (x 0,y 0 ) G y (x 0,y 0 ) u 2 (where u 1 = x x 0 and u 2 = y y 0 ) to find the linear system corresponding to the pendulum equations dx dt = y, dy dt = ω2 sinx γy near the origin; near the critical point (π, 0). In this case F(x,y) = y, G(x,y) = ω 2 sin x γy; (4.1.14) since these functions are differentiable as many times as necessary, the former system is almost linear near each critical point. The derivatives of F and G are F x = 0, F y = 1, G x = ω 2 cosx, G y = γ. (4.1.15) u 2
48 332 Chapter 4. Thus, at the origin the corresponding linear system is ( ) ( )( ) d x 0 1 x = dt y ω 2. (4.1.16) γ y Similarly, evaluating the partial derivatives at (π, 0), we obtain ( ) ( ) ( ) d u 0 1 u = dt v ω 2, (4.1.17) γ v where u = x π, v = y. This is the linear system corresponding to dx dt = y, dy dt = ω2 sinx γy near the point (π, 0).
49 4.1. Almost Linear Systems 333 We now return to the almost linear system x = Ax + g(x). Since the nonlinear term g(x) is small compared to the linear term Ax when x is small, it is reasonable to hope that the trajectories of the linear system x = Ax, are good approximations to those of the nonlinear, at least near the origin.
50 334 Chapter 4. Linear System Almost Linear System r 1, r 2 Type Stability Type Stability r 1 > r 2 > 0 N Unstable N Unstable r 1 < r 2 < 0 N Asymptotically stable N Asymptotically stable r 2 < 0 < r 1 SP Unstable SP Unstable r 1 = r 2 > 0 PN or IN Unstable N or SpP Unstable r 1 = r 2 < 0 PN or IN Asymptotically stable N or SpP Asymptotically stable r 1, r 2 = λ ± iµ λ > 0 SpP Unstable SpP Unstable λ < 0 SpP Asymptotically stable SpP Asymptotically stable r 1 = µ, r 2 = µ C Stable C or SpP Indeterminate Note: N, node; IN, improper node; SP, saddle point; SpP, spiral point; C, center. Table 4.1: Stability Properties of Linear Systems x = Ax with det(a ri)=0 and det A 0 Theorem Let r 1 and r 2 be the eigenvalues of the linear system x = Ax, corresponding to the almost linear system x = Ax + g(x). Then the type and stability of the critical point (0, 0) of the linear system and the almost linear system are as shown in Table 4.1. Proof: Omit.
51 4.1. Almost Linear Systems 335 Remarks Theorem says that for small x (or x x 0 ) the nonlinear terms are also small and don t affect the stability and type of critical point as determined by the linear terms except in (1) r 1 and r 2 pure approximates imaginary, (2) r 1 and r 2 real and equal. Even if the critical point is of the same type, the trajectories may be different in appearance from those of the corresponding linear system, except very near the critical point. However, it can be shown that the slopes at which trajectories enter or leave the critical points are given correctly by the linear equation.
52 336 Chapter 4. Damped Pendulum. Near the origin dx dt = y, dy dt = ω2 sinx γy are approximated by the linear system ( ) ( d x 0 1 = dt y ω 2 γ whose eigenvalues are )( x y ), r 1,r 2 = γ ± γ 2 4ω 2. (4.1.18) 2 The nature of the solutions depend on the sign of γ 2 4ω 2 as follows. 1. If γ 2 4ω 2 > 0, then the eigenvalues are real, unequal and negative. The critical point (0, 0) is an asymptotically stable node of both systems. 2. If γ 2 4ω 2 = 0, then the eigenvalues are real, equal, and negative. The critical point (0, 0) is an asymptotically stable node of the linear system. It may be either an asymptotically stable node or spiral point of the almost linear system.
53 4.1. Almost Linear Systems If γ 2 4ω 2 < 0, then the eigenvalues are complex with negative real part. The critical point (0, 0) is an asymptotically stable spiral point of both systems. Thus the critical point (0, 0) is a spiral point of the system dx dt = y, dy dt = ω2 sinx γy if the damping is small and a node if the damping is large enough. In either case, the origin is asymptotically stable. In the case of γ 2 4ω 2 < 0, corresponding to small damping. The direction of motion on the spirals near (0, 0) can be obtained directly from dx dt = y, dy dt = ω2 sinx γy.
 on the trajectory is moving to the right, so the direction of motion on the spirals is clockwise.")
54 338 Chapter 4. Consider the point at which a spiral intersects the positive y-axis. At such a point dx/dt > 0. The point (x,y) on the trajectory is moving to the right, so the direction of motion on the spirals is clockwise. The behavior of the pendulum near the critical points (±nπ, 0), with n even, is the same as its behavior near the origin. We expect this on physical grounds since all these critical points correspond to the downward equilibrium position of the pendulum. Figure 4.14 shows the clockwise spirals at a few of these critical points. Figure 4.14: Asymptotically stable spiral points for the damped pendulum.
55 4.1. Almost Linear Systems 339 Now let us consider the critical point (π, 0). Here the nonlinear equations are approximated by the linear system d dt ( u v ) = whose eigenvalues are ( 0 1 ω 2 γ ) ( u v ), r 1,r 2 = γ ± γ 2 + 4ω 2. (4.1.19) 2 One eigenvalue (r 1 ) is positive and the other (r 2 ) is negative. Therefore, regardless of the amount of damping, the critical point x = π, y = 0 is an unstable saddle point of both systems. To examine the behavior of trajectories near the saddle point (π, 0), we write down the general solution of above system ( u v ) ( ) ( ) = C 1 e 1r1 r1t + C 2 e 1r2 r2t, (4.1.20) where C 1 and C 2 are arbitrary constants.
56 340 Chapter 4. Since r 1 > 0 and r 2 < 0, it follows that the solution that approaches zero as t corresponds to C 1 = 0. For this solution v/u = r 2, so the slope of the entering trajectories is negative; one lies in the second quadrant (C 2 < 0) and the other lies in the fourth quadrant (C 2 > 0). For C 2 = 0 we obtain the pair of trajectories exiting from the saddle point. These trajectories have slope r 1 > 0; one lies in the first quadrant (C 1 > 0) and the other lies in the third quadrant (C 1 < 0). The situation is the same at other critical points (nπ, 0) with n odd. These all correspond to the upward equilibrium position of the pendulum, so we expect them to be unstable. The analysis at (π, 0) can be repeated to show that they are saddle points oriented in the same way as the one at (π, 0).


57 4.1. Almost Linear Systems 341 Diagrams of the trajectories in the neighborhood of two saddle points are shown in Figure Figure 4.15: Unstable saddle points for the damped pendulum.
58 342 Chapter 4. Example The equations of motion of a certain pendulum are dx/dt = y, dy/dt = 9 sinx 1 y, (4.1.21) 5 where x = θ and y = dθ/dt. Draw a phase portrait for this system and explain how it shows the possible motions of the pendulum. Solution By plotting the trajectories starting at various initial points in the phase plane we obtain the phase portrait shown in Figure 4.16.

, where n = 0, ±1, ±2,.")
 position of the pendulum.")

59 4.1. Almost Linear Systems 343 Figure 4.16: Phase portrait for the damped pendulum. As we have seen, the critical points (equilibrium solutions) are the points (nπ, 0), where n = 0, ±1, ±2,. Even values of n, including zero, (odd values) correspond to the downward (upward) position of the pendulum. Near each of the asymptotically stable critical points the trajectories are clockwise spirals that represent a decaying oscillation about the downward equilibrium position. The wavy horizontal portions of the trajecto-
60 344 Chapter 4. ries that occur for larger values of y represent whirling motions of the pendulum.
61 4.1. Almost Linear Systems 345 A whirling motion cannot continue indefinitely, eventually the angular velocity is so much reduced by the damping term that the pendulum can no longer go over the top, and instead begins to oscillate about its downward position. The trajectories that enter the saddle points separate the phase plane into regions. Such a trajectory is called a separatrix. Each region contains exactly one of the asymptotically stable spiral points. The initial conditions on θ and dθ/dt determine the position of an initial point (x, y) in the phase plane. The subsequent motion of the pendulum is represented by the trajectory passing through the initial point as it spirals toward the asymptotically stable critical point in that region. The set of all initial points from which trajectories approach a given asymptotically stable critical point is called the basin of attraction or the region of asymptotic stability for that critical point.
62 346 Chapter 4. Each asymptotically stable critical point has its own basin of attraction, which is bounded by the separatrices through the neighboring unstable saddle points. The basin of attraction for the origin is shown in Figure Note that it is mathematically possible (but physically unrealizable) to choose initial conditions on a separatrix so that the resulting motion leads to a balanced pendulum in a vertically upward position of unstable equilibrium. In pendulum equations, recall that the linear system (4.1.1) has only the single critical point x = 0 if deta 0. Thus, if the origin is asymptotically stable, then not only do trajectories that start close to the origin approach it, but, in fact, every trajectory approaches the origin. In this case the critical point x = 0 is said to be globally asymptotically stable. This property of linear systems is not true for
63 4.1. Almost Linear Systems 347 nonlinear systems in general. For nonlinear systems an important question is to determine (or to estimate) the basin of attraction for each asymptotically stable critical point.
Chapter 6 Nonlinear Systems and Phenomena. Friday, November 2, 12
 Chapter 6 Nonlinear Systems and Phenomena 6.1 Stability and the Phase Plane We now move to nonlinear systems Begin with the first-order system for x(t) d dt x = f(x,t), x(0) = x 0 In particular, consider
Chapter 6 Nonlinear Systems and Phenomena 6.1 Stability and the Phase Plane We now move to nonlinear systems Begin with the first-order system for x(t) d dt x = f(x,t), x(0) = x 0 In particular, consider
A plane autonomous system is a pair of simultaneous first-order differential equations,
 Chapter 11 Phase-Plane Techniques 11.1 Plane Autonomous Systems A plane autonomous system is a pair of simultaneous first-order differential equations, ẋ = f(x, y), ẏ = g(x, y). This system has an equilibrium
Chapter 11 Phase-Plane Techniques 11.1 Plane Autonomous Systems A plane autonomous system is a pair of simultaneous first-order differential equations, ẋ = f(x, y), ẏ = g(x, y). This system has an equilibrium
Math 266: Phase Plane Portrait
 Math 266: Phase Plane Portrait Long Jin Purdue, Spring 2018 Review: Phase line for an autonomous equation For a single autonomous equation y = f (y) we used a phase line to illustrate the equilibrium solutions
Math 266: Phase Plane Portrait Long Jin Purdue, Spring 2018 Review: Phase line for an autonomous equation For a single autonomous equation y = f (y) we used a phase line to illustrate the equilibrium solutions
154 Chapter 9 Hints, Answers, and Solutions The particular trajectories are highlighted in the phase portraits below.
 54 Chapter 9 Hints, Answers, and Solutions 9. The Phase Plane 9.. 4. The particular trajectories are highlighted in the phase portraits below... 3. 4. 9..5. Shown below is one possibility with x(t) and
54 Chapter 9 Hints, Answers, and Solutions 9. The Phase Plane 9.. 4. The particular trajectories are highlighted in the phase portraits below... 3. 4. 9..5. Shown below is one possibility with x(t) and
Math 312 Lecture Notes Linear Two-dimensional Systems of Differential Equations
 Math 2 Lecture Notes Linear Two-dimensional Systems of Differential Equations Warren Weckesser Department of Mathematics Colgate University February 2005 In these notes, we consider the linear system of
Math 2 Lecture Notes Linear Two-dimensional Systems of Differential Equations Warren Weckesser Department of Mathematics Colgate University February 2005 In these notes, we consider the linear system of
MATH 215/255 Solutions to Additional Practice Problems April dy dt
 . For the nonlinear system MATH 5/55 Solutions to Additional Practice Problems April 08 dx dt = x( x y, dy dt = y(.5 y x, x 0, y 0, (a Show that if x(0 > 0 and y(0 = 0, then the solution (x(t, y(t of the
. For the nonlinear system MATH 5/55 Solutions to Additional Practice Problems April 08 dx dt = x( x y, dy dt = y(.5 y x, x 0, y 0, (a Show that if x(0 > 0 and y(0 = 0, then the solution (x(t, y(t of the
Section 9.3 Phase Plane Portraits (for Planar Systems)
") Section 9.3 Phase Plane Portraits (for Planar Systems) Key Terms: Equilibrium point of planer system yꞌ = Ay o Equilibrium solution Exponential solutions o Half-line solutions Unstable solution Stable
Section 9.3 Phase Plane Portraits (for Planar Systems) Key Terms: Equilibrium point of planer system yꞌ = Ay o Equilibrium solution Exponential solutions o Half-line solutions Unstable solution Stable
+ i. cos(t) + 2 sin(t) + c 2.
 + 2 sin(t) + c 2.") MATH HOMEWORK #7 PART A SOLUTIONS Problem 7.6.. Consider the system x = 5 x. a Express the general solution of the given system of equations in terms of realvalued functions. b Draw a direction field,
MATH HOMEWORK #7 PART A SOLUTIONS Problem 7.6.. Consider the system x = 5 x. a Express the general solution of the given system of equations in terms of realvalued functions. b Draw a direction field,
Lecture 38. Almost Linear Systems
 Math 245 - Mathematics of Physics and Engineering I Lecture 38. Almost Linear Systems April 20, 2012 Konstantin Zuev (USC) Math 245, Lecture 38 April 20, 2012 1 / 11 Agenda Stability Properties of Linear
Math 245 - Mathematics of Physics and Engineering I Lecture 38. Almost Linear Systems April 20, 2012 Konstantin Zuev (USC) Math 245, Lecture 38 April 20, 2012 1 / 11 Agenda Stability Properties of Linear
2.10 Saddles, Nodes, Foci and Centers
 2.10 Saddles, Nodes, Foci and Centers In Section 1.5, a linear system (1 where x R 2 was said to have a saddle, node, focus or center at the origin if its phase portrait was linearly equivalent to one
2.10 Saddles, Nodes, Foci and Centers In Section 1.5, a linear system (1 where x R 2 was said to have a saddle, node, focus or center at the origin if its phase portrait was linearly equivalent to one
STABILITY. Phase portraits and local stability
 MAS271 Methods for differential equations Dr. R. Jain STABILITY Phase portraits and local stability We are interested in system of ordinary differential equations of the form ẋ = f(x, y), ẏ = g(x, y),
MAS271 Methods for differential equations Dr. R. Jain STABILITY Phase portraits and local stability We are interested in system of ordinary differential equations of the form ẋ = f(x, y), ẏ = g(x, y),
Autonomous Systems and Stability
 LECTURE 8 Autonomous Systems and Stability An autonomous system is a system of ordinary differential equations of the form 1 1 ( 1 ) 2 2 ( 1 ). ( 1 ) or, in vector notation, x 0 F (x) That is to say, an
LECTURE 8 Autonomous Systems and Stability An autonomous system is a system of ordinary differential equations of the form 1 1 ( 1 ) 2 2 ( 1 ). ( 1 ) or, in vector notation, x 0 F (x) That is to say, an
Nonlinear dynamics & chaos BECS
 Nonlinear dynamics & chaos BECS-114.7151 Phase portraits Focus: nonlinear systems in two dimensions General form of a vector field on the phase plane: Vector notation: Phase portraits Solution x(t) describes
Nonlinear dynamics & chaos BECS-114.7151 Phase portraits Focus: nonlinear systems in two dimensions General form of a vector field on the phase plane: Vector notation: Phase portraits Solution x(t) describes
Linear Planar Systems Math 246, Spring 2009, Professor David Levermore We now consider linear systems of the form
 Linear Planar Systems Math 246, Spring 2009, Professor David Levermore We now consider linear systems of the form d x x 1 = A, where A = dt y y a11 a 12 a 21 a 22 Here the entries of the coefficient matrix
Linear Planar Systems Math 246, Spring 2009, Professor David Levermore We now consider linear systems of the form d x x 1 = A, where A = dt y y a11 a 12 a 21 a 22 Here the entries of the coefficient matrix
ENGI Linear Approximation (2) Page Linear Approximation to a System of Non-Linear ODEs (2)
 Page Linear Approximation to a System of Non-Linear ODEs (2)") ENGI 940 4.06 - Linear Approximation () Page 4. 4.06 Linear Approximation to a System of Non-Linear ODEs () From sections 4.0 and 4.0, the non-linear system dx dy = x = P( x, y), = y = Q( x, y) () with
ENGI 940 4.06 - Linear Approximation () Page 4. 4.06 Linear Approximation to a System of Non-Linear ODEs () From sections 4.0 and 4.0, the non-linear system dx dy = x = P( x, y), = y = Q( x, y) () with
Copyright (c) 2006 Warren Weckesser
 2006 Warren Weckesser") 2.2. PLANAR LINEAR SYSTEMS 3 2.2. Planar Linear Systems We consider the linear system of two first order differential equations or equivalently, = ax + by (2.7) dy = cx + dy [ d x x = A x, where x =, and
2.2. PLANAR LINEAR SYSTEMS 3 2.2. Planar Linear Systems We consider the linear system of two first order differential equations or equivalently, = ax + by (2.7) dy = cx + dy [ d x x = A x, where x =, and
Department of Mathematics IIT Guwahati
 Stability of Linear Systems in R 2 Department of Mathematics IIT Guwahati A system of first order differential equations is called autonomous if the system can be written in the form dx 1 dt = g 1(x 1,
Stability of Linear Systems in R 2 Department of Mathematics IIT Guwahati A system of first order differential equations is called autonomous if the system can be written in the form dx 1 dt = g 1(x 1,
Def. (a, b) is a critical point of the autonomous system. 1 Proper node (stable or unstable) 2 Improper node (stable or unstable)
 is a critical point of the autonomous system. 1 Proper node (stable or unstable) 2 Improper node (stable or unstable)") Types of critical points Def. (a, b) is a critical point of the autonomous system Math 216 Differential Equations Kenneth Harris kaharri@umich.edu Department of Mathematics University of Michigan November
Types of critical points Def. (a, b) is a critical point of the autonomous system Math 216 Differential Equations Kenneth Harris kaharri@umich.edu Department of Mathematics University of Michigan November
ENGI 9420 Lecture Notes 4 - Stability Analysis Page Stability Analysis for Non-linear Ordinary Differential Equations
 ENGI 940 Lecture Notes 4 - Stability Analysis Page 4.01 4. Stability Analysis for Non-linear Ordinary Differential Equations A pair of simultaneous first order homogeneous linear ordinary differential
ENGI 940 Lecture Notes 4 - Stability Analysis Page 4.01 4. Stability Analysis for Non-linear Ordinary Differential Equations A pair of simultaneous first order homogeneous linear ordinary differential
4 Second-Order Systems
 4 Second-Order Systems Second-order autonomous systems occupy an important place in the study of nonlinear systems because solution trajectories can be represented in the plane. This allows for easy visualization
4 Second-Order Systems Second-order autonomous systems occupy an important place in the study of nonlinear systems because solution trajectories can be represented in the plane. This allows for easy visualization
Nonlinear Control Lecture 2:Phase Plane Analysis
 Nonlinear Control Lecture 2:Phase Plane Analysis Farzaneh Abdollahi Department of Electrical Engineering Amirkabir University of Technology Fall 2010 r. Farzaneh Abdollahi Nonlinear Control Lecture 2 1/53
Nonlinear Control Lecture 2:Phase Plane Analysis Farzaneh Abdollahi Department of Electrical Engineering Amirkabir University of Technology Fall 2010 r. Farzaneh Abdollahi Nonlinear Control Lecture 2 1/53
Math 4B Notes. Written by Victoria Kala SH 6432u Office Hours: T 12:45 1:45pm Last updated 7/24/2016
 Math 4B Notes Written by Victoria Kala vtkala@math.ucsb.edu SH 6432u Office Hours: T 2:45 :45pm Last updated 7/24/206 Classification of Differential Equations The order of a differential equation is the
Math 4B Notes Written by Victoria Kala vtkala@math.ucsb.edu SH 6432u Office Hours: T 2:45 :45pm Last updated 7/24/206 Classification of Differential Equations The order of a differential equation is the
Math 216 Final Exam 24 April, 2017
 Math 216 Final Exam 24 April, 2017 This sample exam is provided to serve as one component of your studying for this exam in this course. Please note that it is not guaranteed to cover the material that
Math 216 Final Exam 24 April, 2017 This sample exam is provided to serve as one component of your studying for this exam in this course. Please note that it is not guaranteed to cover the material that
Stability of Dynamical systems
 Stability of Dynamical systems Stability Isolated equilibria Classification of Isolated Equilibria Attractor and Repeller Almost linear systems Jacobian Matrix Stability Consider an autonomous system u
Stability of Dynamical systems Stability Isolated equilibria Classification of Isolated Equilibria Attractor and Repeller Almost linear systems Jacobian Matrix Stability Consider an autonomous system u
Math 3301 Homework Set Points ( ) ( ) I ll leave it to you to verify that the eigenvalues and eigenvectors for this matrix are, ( ) ( ) ( ) ( )
 ( ) I ll leave it to you to verify that the eigenvalues and eigenvectors for this matrix are, ( ) ( ) ( ) ( )") #7. ( pts) I ll leave it to you to verify that the eigenvalues and eigenvectors for this matrix are, λ 5 λ 7 t t ce The general solution is then : 5 7 c c c x( 0) c c 9 9 c+ c c t 5t 7 e + e A sketch of
#7. ( pts) I ll leave it to you to verify that the eigenvalues and eigenvectors for this matrix are, λ 5 λ 7 t t ce The general solution is then : 5 7 c c c x( 0) c c 9 9 c+ c c t 5t 7 e + e A sketch of
Understand the existence and uniqueness theorems and what they tell you about solutions to initial value problems.
 Review Outline To review for the final, look over the following outline and look at problems from the book and on the old exam s and exam reviews to find problems about each of the following topics.. Basics
Review Outline To review for the final, look over the following outline and look at problems from the book and on the old exam s and exam reviews to find problems about each of the following topics.. Basics
LECTURE 8: DYNAMICAL SYSTEMS 7
 15-382 COLLECTIVE INTELLIGENCE S18 LECTURE 8: DYNAMICAL SYSTEMS 7 INSTRUCTOR: GIANNI A. DI CARO GEOMETRIES IN THE PHASE SPACE Damped pendulum One cp in the region between two separatrix Separatrix Basin
15-382 COLLECTIVE INTELLIGENCE S18 LECTURE 8: DYNAMICAL SYSTEMS 7 INSTRUCTOR: GIANNI A. DI CARO GEOMETRIES IN THE PHASE SPACE Damped pendulum One cp in the region between two separatrix Separatrix Basin
Hello everyone, Best, Josh
 Hello everyone, As promised, the chart mentioned in class about what kind of critical points you get with different types of eigenvalues are included on the following pages (The pages are an ecerpt from
Hello everyone, As promised, the chart mentioned in class about what kind of critical points you get with different types of eigenvalues are included on the following pages (The pages are an ecerpt from
ENGI Duffing s Equation Page 4.65
 ENGI 940 4. - Duffing s Equation Page 4.65 4. Duffing s Equation Among the simplest models of damped non-linear forced oscillations of a mechanical or electrical system with a cubic stiffness term is Duffing
ENGI 940 4. - Duffing s Equation Page 4.65 4. Duffing s Equation Among the simplest models of damped non-linear forced oscillations of a mechanical or electrical system with a cubic stiffness term is Duffing
EN Nonlinear Control and Planning in Robotics Lecture 3: Stability February 4, 2015
 EN530.678 Nonlinear Control and Planning in Robotics Lecture 3: Stability February 4, 2015 Prof: Marin Kobilarov 0.1 Model prerequisites Consider ẋ = f(t, x). We will make the following basic assumptions
EN530.678 Nonlinear Control and Planning in Robotics Lecture 3: Stability February 4, 2015 Prof: Marin Kobilarov 0.1 Model prerequisites Consider ẋ = f(t, x). We will make the following basic assumptions
The Liapunov Method for Determining Stability (DRAFT)
") 44 The Liapunov Method for Determining Stability (DRAFT) 44.1 The Liapunov Method, Naively Developed In the last chapter, we discussed describing trajectories of a 2 2 autonomous system x = F(x) as level
44 The Liapunov Method for Determining Stability (DRAFT) 44.1 The Liapunov Method, Naively Developed In the last chapter, we discussed describing trajectories of a 2 2 autonomous system x = F(x) as level
Differential Equations 2280 Sample Midterm Exam 3 with Solutions Exam Date: 24 April 2015 at 12:50pm
 Differential Equations 228 Sample Midterm Exam 3 with Solutions Exam Date: 24 April 25 at 2:5pm Instructions: This in-class exam is 5 minutes. No calculators, notes, tables or books. No answer check is
Differential Equations 228 Sample Midterm Exam 3 with Solutions Exam Date: 24 April 25 at 2:5pm Instructions: This in-class exam is 5 minutes. No calculators, notes, tables or books. No answer check is
1. < 0: the eigenvalues are real and have opposite signs; the fixed point is a saddle point
 Solving a Linear System τ = trace(a) = a + d = λ 1 + λ 2 λ 1,2 = τ± = det(a) = ad bc = λ 1 λ 2 Classification of Fixed Points τ 2 4 1. < 0: the eigenvalues are real and have opposite signs; the fixed point
Solving a Linear System τ = trace(a) = a + d = λ 1 + λ 2 λ 1,2 = τ± = det(a) = ad bc = λ 1 λ 2 Classification of Fixed Points τ 2 4 1. < 0: the eigenvalues are real and have opposite signs; the fixed point
ENGI 9420 Lecture Notes 4 - Stability Analysis Page Stability Analysis for Non-linear Ordinary Differential Equations
 ENGI 940 Lecture Notes 4 - Stability Analysis Page 4.0 4. Stability Analysis for Non-linear Ordinary Differential Equations A pair of simultaneous first order homogeneous linear ordinary differential equations
ENGI 940 Lecture Notes 4 - Stability Analysis Page 4.0 4. Stability Analysis for Non-linear Ordinary Differential Equations A pair of simultaneous first order homogeneous linear ordinary differential equations
Problem set 7 Math 207A, Fall 2011 Solutions
 Problem set 7 Math 207A, Fall 2011 s 1. Classify the equilibrium (x, y) = (0, 0) of the system x t = x, y t = y + x 2. Is the equilibrium hyperbolic? Find an equation for the trajectories in (x, y)- phase
Problem set 7 Math 207A, Fall 2011 s 1. Classify the equilibrium (x, y) = (0, 0) of the system x t = x, y t = y + x 2. Is the equilibrium hyperbolic? Find an equation for the trajectories in (x, y)- phase
Phase portraits in two dimensions
 Phase portraits in two dimensions 8.3, Spring, 999 It [ is convenient to represent the solutions to an autonomous system x = f( x) (where x x = ) by means of a phase portrait. The x, y plane is called
Phase portraits in two dimensions 8.3, Spring, 999 It [ is convenient to represent the solutions to an autonomous system x = f( x) (where x x = ) by means of a phase portrait. The x, y plane is called
ODE, part 2. Dynamical systems, differential equations
 ODE, part 2 Anna-Karin Tornberg Mathematical Models, Analysis and Simulation Fall semester, 2011 Dynamical systems, differential equations Consider a system of n first order equations du dt = f(u, t),
ODE, part 2 Anna-Karin Tornberg Mathematical Models, Analysis and Simulation Fall semester, 2011 Dynamical systems, differential equations Consider a system of n first order equations du dt = f(u, t),
Fundamentals of Dynamical Systems / Discrete-Time Models. Dr. Dylan McNamara people.uncw.edu/ mcnamarad
 Fundamentals of Dynamical Systems / Discrete-Time Models Dr. Dylan McNamara people.uncw.edu/ mcnamarad Dynamical systems theory Considers how systems autonomously change along time Ranges from Newtonian
Fundamentals of Dynamical Systems / Discrete-Time Models Dr. Dylan McNamara people.uncw.edu/ mcnamarad Dynamical systems theory Considers how systems autonomously change along time Ranges from Newtonian
FIRST-ORDER SYSTEMS OF ORDINARY DIFFERENTIAL EQUATIONS III: Autonomous Planar Systems David Levermore Department of Mathematics University of Maryland
 FIRST-ORDER SYSTEMS OF ORDINARY DIFFERENTIAL EQUATIONS III: Autonomous Planar Systems David Levermore Department of Mathematics University of Maryland 4 May 2012 Because the presentation of this material
FIRST-ORDER SYSTEMS OF ORDINARY DIFFERENTIAL EQUATIONS III: Autonomous Planar Systems David Levermore Department of Mathematics University of Maryland 4 May 2012 Because the presentation of this material
MAT 22B - Lecture Notes
 MAT 22B - Lecture Notes 4 September 205 Solving Systems of ODE Last time we talked a bit about how systems of ODE arise and why they are nice for visualization. Now we'll talk about the basics of how to
MAT 22B - Lecture Notes 4 September 205 Solving Systems of ODE Last time we talked a bit about how systems of ODE arise and why they are nice for visualization. Now we'll talk about the basics of how to
The construction and use of a phase diagram to investigate the properties of a dynamic system
 File: Phase.doc/pdf The construction and use of a phase diagram to investigate the properties of a dynamic system 1. Introduction Many economic or biological-economic models can be represented as dynamic
File: Phase.doc/pdf The construction and use of a phase diagram to investigate the properties of a dynamic system 1. Introduction Many economic or biological-economic models can be represented as dynamic
20D - Homework Assignment 5
 Brian Bowers TA for Hui Sun MATH D Homework Assignment 5 November 8, 3 D - Homework Assignment 5 First, I present the list of all matrix row operations. We use combinations of these steps to row reduce
Brian Bowers TA for Hui Sun MATH D Homework Assignment 5 November 8, 3 D - Homework Assignment 5 First, I present the list of all matrix row operations. We use combinations of these steps to row reduce
Part II Problems and Solutions
 Problem 1: [Complex and repeated eigenvalues] (a) The population of long-tailed weasels and meadow voles on Nantucket Island has been studied by biologists They measure the populations relative to a baseline,
Problem 1: [Complex and repeated eigenvalues] (a) The population of long-tailed weasels and meadow voles on Nantucket Island has been studied by biologists They measure the populations relative to a baseline,
Linearization and Stability Analysis of Nonlinear Problems
 Rose-Hulman Undergraduate Mathematics Journal Volume 16 Issue 2 Article 5 Linearization and Stability Analysis of Nonlinear Problems Robert Morgan Wayne State University Follow this and additional works
Rose-Hulman Undergraduate Mathematics Journal Volume 16 Issue 2 Article 5 Linearization and Stability Analysis of Nonlinear Problems Robert Morgan Wayne State University Follow this and additional works
7 Planar systems of linear ODE
 7 Planar systems of linear ODE Here I restrict my attention to a very special class of autonomous ODE: linear ODE with constant coefficients This is arguably the only class of ODE for which explicit solution
7 Planar systems of linear ODE Here I restrict my attention to a very special class of autonomous ODE: linear ODE with constant coefficients This is arguably the only class of ODE for which explicit solution
Physics: spring-mass system, planet motion, pendulum. Biology: ecology problem, neural conduction, epidemics
 Applications of nonlinear ODE systems: Physics: spring-mass system, planet motion, pendulum Chemistry: mixing problems, chemical reactions Biology: ecology problem, neural conduction, epidemics Economy:
Applications of nonlinear ODE systems: Physics: spring-mass system, planet motion, pendulum Chemistry: mixing problems, chemical reactions Biology: ecology problem, neural conduction, epidemics Economy:
Sample Solutions of Assignment 9 for MAT3270B
 Sample Solutions of Assignment 9 for MAT370B. For the following ODEs, find the eigenvalues and eigenvectors, and classify the critical point 0,0 type and determine whether it is stable, asymptotically
Sample Solutions of Assignment 9 for MAT370B. For the following ODEs, find the eigenvalues and eigenvectors, and classify the critical point 0,0 type and determine whether it is stable, asymptotically
MCE693/793: Analysis and Control of Nonlinear Systems
 MCE693/793: Analysis and Control of Nonlinear Systems Systems of Differential Equations Phase Plane Analysis Hanz Richter Mechanical Engineering Department Cleveland State University Systems of Nonlinear
MCE693/793: Analysis and Control of Nonlinear Systems Systems of Differential Equations Phase Plane Analysis Hanz Richter Mechanical Engineering Department Cleveland State University Systems of Nonlinear
ANSWERS Final Exam Math 250b, Section 2 (Professor J. M. Cushing), 15 May 2008 PART 1
, 15 May 2008 PART 1") ANSWERS Final Exam Math 50b, Section (Professor J. M. Cushing), 5 May 008 PART. (0 points) A bacterial population x grows exponentially according to the equation x 0 = rx, where r>0is the per unit rate
ANSWERS Final Exam Math 50b, Section (Professor J. M. Cushing), 5 May 008 PART. (0 points) A bacterial population x grows exponentially according to the equation x 0 = rx, where r>0is the per unit rate
Homogeneous Constant Matrix Systems, Part II
 4 Homogeneous Constant Matrix Systems, Part II Let us now expand our discussions begun in the previous chapter, and consider homogeneous constant matrix systems whose matrices either have complex eigenvalues
4 Homogeneous Constant Matrix Systems, Part II Let us now expand our discussions begun in the previous chapter, and consider homogeneous constant matrix systems whose matrices either have complex eigenvalues
Math 331 Homework Assignment Chapter 7 Page 1 of 9
 Math Homework Assignment Chapter 7 Page of 9 Instructions: Please make sure to demonstrate every step in your calculations. Return your answers including this homework sheet back to the instructor as a
Math Homework Assignment Chapter 7 Page of 9 Instructions: Please make sure to demonstrate every step in your calculations. Return your answers including this homework sheet back to the instructor as a
Calculus and Differential Equations II
 MATH 250 B Second order autonomous linear systems We are mostly interested with 2 2 first order autonomous systems of the form { x = a x + b y y = c x + d y where x and y are functions of t and a, b, c,
MATH 250 B Second order autonomous linear systems We are mostly interested with 2 2 first order autonomous systems of the form { x = a x + b y y = c x + d y where x and y are functions of t and a, b, c,
Nonlinear Control Lecture 2:Phase Plane Analysis
 Nonlinear Control Lecture 2:Phase Plane Analysis Farzaneh Abdollahi Department of Electrical Engineering Amirkabir University of Technology Fall 2009 Farzaneh Abdollahi Nonlinear Control Lecture 2 1/68
Nonlinear Control Lecture 2:Phase Plane Analysis Farzaneh Abdollahi Department of Electrical Engineering Amirkabir University of Technology Fall 2009 Farzaneh Abdollahi Nonlinear Control Lecture 2 1/68
2.2 The derivative as a Function
 2.2 The derivative as a Function Recall: The derivative of a function f at a fixed number a: f a f a+h f(a) = lim h 0 h Definition (Derivative of f) For any number x, the derivative of f is f x f x+h f(x)
2.2 The derivative as a Function Recall: The derivative of a function f at a fixed number a: f a f a+h f(a) = lim h 0 h Definition (Derivative of f) For any number x, the derivative of f is f x f x+h f(x)
ẋ = f(x, y), ẏ = g(x, y), (x, y) D, can only have periodic solutions if (f,g) changes sign in D or if (f,g)=0in D.
, ẏ = g(x, y), (x, y) D, can only have periodic solutions if (f,g) changes sign in D or if (f,g)=0in D.") 4 Periodic Solutions We have shown that in the case of an autonomous equation the periodic solutions correspond with closed orbits in phase-space. Autonomous two-dimensional systems with phase-space R
4 Periodic Solutions We have shown that in the case of an autonomous equation the periodic solutions correspond with closed orbits in phase-space. Autonomous two-dimensional systems with phase-space R
1 The pendulum equation
 Math 270 Honors ODE I Fall, 2008 Class notes # 5 A longer than usual homework assignment is at the end. The pendulum equation We now come to a particularly important example, the equation for an oscillating
Math 270 Honors ODE I Fall, 2008 Class notes # 5 A longer than usual homework assignment is at the end. The pendulum equation We now come to a particularly important example, the equation for an oscillating
Now I switch to nonlinear systems. In this chapter the main object of study will be
 Chapter 4 Stability 4.1 Autonomous systems Now I switch to nonlinear systems. In this chapter the main object of study will be ẋ = f(x), x(t) X R k, f : X R k, (4.1) where f is supposed to be locally Lipschitz
Chapter 4 Stability 4.1 Autonomous systems Now I switch to nonlinear systems. In this chapter the main object of study will be ẋ = f(x), x(t) X R k, f : X R k, (4.1) where f is supposed to be locally Lipschitz
SANDERSON HIGH SCHOOL AP CALCULUS AB/BC SUMMER REVIEW PACKET
 SANDERSON HIGH SCHOOL AP CALCULUS AB/BC SUMMER REVIEW PACKET 017-018 Name: 1. This packet is to be handed in on Monday August 8, 017.. All work must be shown on separate paper attached to the packet. 3.
SANDERSON HIGH SCHOOL AP CALCULUS AB/BC SUMMER REVIEW PACKET 017-018 Name: 1. This packet is to be handed in on Monday August 8, 017.. All work must be shown on separate paper attached to the packet. 3.
MATH 162. Midterm 2 ANSWERS November 18, 2005
 MATH 62 Midterm 2 ANSWERS November 8, 2005. (0 points) Does the following integral converge or diverge? To get full credit, you must justify your answer. 3x 2 x 3 + 4x 2 + 2x + 4 dx You may not be able
MATH 62 Midterm 2 ANSWERS November 8, 2005. (0 points) Does the following integral converge or diverge? To get full credit, you must justify your answer. 3x 2 x 3 + 4x 2 + 2x + 4 dx You may not be able
Autonomous systems. Ordinary differential equations which do not contain the independent variable explicitly are said to be autonomous.
 Autonomous equations Autonomous systems Ordinary differential equations which do not contain the independent variable explicitly are said to be autonomous. i f i(x 1, x 2,..., x n ) for i 1,..., n As you
Autonomous equations Autonomous systems Ordinary differential equations which do not contain the independent variable explicitly are said to be autonomous. i f i(x 1, x 2,..., x n ) for i 1,..., n As you
Solutions to Math 53 Math 53 Practice Final
 Solutions to Math 5 Math 5 Practice Final 20 points Consider the initial value problem y t 4yt = te t with y 0 = and y0 = 0 a 8 points Find the Laplace transform of the solution of this IVP b 8 points
Solutions to Math 5 Math 5 Practice Final 20 points Consider the initial value problem y t 4yt = te t with y 0 = and y0 = 0 a 8 points Find the Laplace transform of the solution of this IVP b 8 points
Complex Dynamic Systems: Qualitative vs Quantitative analysis
 Complex Dynamic Systems: Qualitative vs Quantitative analysis Complex Dynamic Systems Chiara Mocenni Department of Information Engineering and Mathematics University of Siena (mocenni@diism.unisi.it) Dynamic
Complex Dynamic Systems: Qualitative vs Quantitative analysis Complex Dynamic Systems Chiara Mocenni Department of Information Engineering and Mathematics University of Siena (mocenni@diism.unisi.it) Dynamic
Half of Final Exam Name: Practice Problems October 28, 2014
 Math 54. Treibergs Half of Final Exam Name: Practice Problems October 28, 24 Half of the final will be over material since the last midterm exam, such as the practice problems given here. The other half
Math 54. Treibergs Half of Final Exam Name: Practice Problems October 28, 24 Half of the final will be over material since the last midterm exam, such as the practice problems given here. The other half
Kinematics of fluid motion
 Chapter 4 Kinematics of fluid motion 4.1 Elementary flow patterns Recall the discussion of flow patterns in Chapter 1. The equations for particle paths in a three-dimensional, steady fluid flow are dx
Chapter 4 Kinematics of fluid motion 4.1 Elementary flow patterns Recall the discussion of flow patterns in Chapter 1. The equations for particle paths in a three-dimensional, steady fluid flow are dx
Math 5BI: Problem Set 6 Gradient dynamical systems
 Math 5BI: Problem Set 6 Gradient dynamical systems April 25, 2007 Recall that if f(x) = f(x 1, x 2,..., x n ) is a smooth function of n variables, the gradient of f is the vector field f(x) = ( f)(x 1,
Math 5BI: Problem Set 6 Gradient dynamical systems April 25, 2007 Recall that if f(x) = f(x 1, x 2,..., x n ) is a smooth function of n variables, the gradient of f is the vector field f(x) = ( f)(x 1,
arxiv: v1 [physics.class-ph] 5 Jan 2012
![arxiv: v1 [physics.class-ph] 5 Jan 2012](/thumbs/82/84800191.jpg "arxiv: v1 [physics.class-ph] 5 Jan 2012") Damped bead on a rotating circular hoop - a bifurcation zoo Shovan Dutta Department of Electronics and Telecommunication Engineering, Jadavpur University, Calcutta 700 032, India. Subhankar Ray Department
Damped bead on a rotating circular hoop - a bifurcation zoo Shovan Dutta Department of Electronics and Telecommunication Engineering, Jadavpur University, Calcutta 700 032, India. Subhankar Ray Department
Even-Numbered Homework Solutions
 -6 Even-Numbered Homework Solutions Suppose that the matric B has λ = + 5i as an eigenvalue with eigenvector Y 0 = solution to dy = BY Using Euler s formula, we can write the complex-valued solution Y
-6 Even-Numbered Homework Solutions Suppose that the matric B has λ = + 5i as an eigenvalue with eigenvector Y 0 = solution to dy = BY Using Euler s formula, we can write the complex-valued solution Y
Solutions to Final Exam Sample Problems, Math 246, Spring 2011
 Solutions to Final Exam Sample Problems, Math 246, Spring 2 () Consider the differential equation dy dt = (9 y2 )y 2 (a) Identify its equilibrium (stationary) points and classify their stability (b) Sketch
Solutions to Final Exam Sample Problems, Math 246, Spring 2 () Consider the differential equation dy dt = (9 y2 )y 2 (a) Identify its equilibrium (stationary) points and classify their stability (b) Sketch
Chapter 9 Global Nonlinear Techniques
 Chapter 9 Global Nonlinear Techniques Consider nonlinear dynamical system 0 Nullcline X 0 = F (X) = B @ f 1 (X) f 2 (X). f n (X) x j nullcline = fx : f j (X) = 0g equilibrium solutions = intersection of
Chapter 9 Global Nonlinear Techniques Consider nonlinear dynamical system 0 Nullcline X 0 = F (X) = B @ f 1 (X) f 2 (X). f n (X) x j nullcline = fx : f j (X) = 0g equilibrium solutions = intersection of
= 2e t e 2t + ( e 2t )e 3t = 2e t e t = e t. Math 20D Final Review
e 3t = 2e t e t = e t. Math 20D Final Review") Math D Final Review. Solve the differential equation in two ways, first using variation of parameters and then using undetermined coefficients: Corresponding homogenous equation: with characteristic equation
Math D Final Review. Solve the differential equation in two ways, first using variation of parameters and then using undetermined coefficients: Corresponding homogenous equation: with characteristic equation
Chapter 7. Nonlinear Systems. 7.1 Introduction
 Nonlinear Systems Chapter 7 The scientist does not study nature because it is useful; he studies it because he delights in it, and he delights in it because it is beautiful. - Jules Henri Poincaré (1854-1912)
Nonlinear Systems Chapter 7 The scientist does not study nature because it is useful; he studies it because he delights in it, and he delights in it because it is beautiful. - Jules Henri Poincaré (1854-1912)
Sample Solutions of Assignment 10 for MAT3270B
 Sample Solutions of Assignment 1 for MAT327B 1. For the following ODEs, (a) determine all critical points; (b) find the corresponding linear system near each critical point; (c) find the eigenvalues of
Sample Solutions of Assignment 1 for MAT327B 1. For the following ODEs, (a) determine all critical points; (b) find the corresponding linear system near each critical point; (c) find the eigenvalues of
Chapter 4: First-order differential equations. Similarity and Transport Phenomena in Fluid Dynamics Christophe Ancey
 Chapter 4: First-order differential equations Similarity and Transport Phenomena in Fluid Dynamics Christophe Ancey Chapter 4: First-order differential equations Phase portrait Singular point Separatrix
Chapter 4: First-order differential equations Similarity and Transport Phenomena in Fluid Dynamics Christophe Ancey Chapter 4: First-order differential equations Phase portrait Singular point Separatrix
Math 215/255: Elementary Differential Equations I Harish N Dixit, Department of Mathematics, UBC
 Math 215/255: Elementary Differential Equations I Harish N Dixit, Department of Mathematics, UBC First Order Equations Linear Equations y + p(x)y = q(x) Write the equation in the standard form, Calculate
Math 215/255: Elementary Differential Equations I Harish N Dixit, Department of Mathematics, UBC First Order Equations Linear Equations y + p(x)y = q(x) Write the equation in the standard form, Calculate
Nonlinear Autonomous Dynamical systems of two dimensions. Part A
 Nonlinear Autonomous Dynamical systems of two dimensions Part A Nonlinear Autonomous Dynamical systems of two dimensions x f ( x, y), x(0) x vector field y g( xy, ), y(0) y F ( f, g) 0 0 f, g are continuous
Nonlinear Autonomous Dynamical systems of two dimensions Part A Nonlinear Autonomous Dynamical systems of two dimensions x f ( x, y), x(0) x vector field y g( xy, ), y(0) y F ( f, g) 0 0 f, g are continuous
MATH 415, WEEKS 7 & 8: Conservative and Hamiltonian Systems, Non-linear Pendulum
 MATH 415, WEEKS 7 & 8: Conservative and Hamiltonian Systems, Non-linear Pendulum Reconsider the following example from last week: dx dt = x y dy dt = x2 y. We were able to determine many qualitative features
MATH 415, WEEKS 7 & 8: Conservative and Hamiltonian Systems, Non-linear Pendulum Reconsider the following example from last week: dx dt = x y dy dt = x2 y. We were able to determine many qualitative features
1 Lyapunov theory of stability
 M.Kawski, APM 581 Diff Equns Intro to Lyapunov theory. November 15, 29 1 1 Lyapunov theory of stability Introduction. Lyapunov s second (or direct) method provides tools for studying (asymptotic) stability
M.Kawski, APM 581 Diff Equns Intro to Lyapunov theory. November 15, 29 1 1 Lyapunov theory of stability Introduction. Lyapunov s second (or direct) method provides tools for studying (asymptotic) stability
Chapter 4. Systems of ODEs. Phase Plane. Qualitative Methods
 Chapter 4 Systems of ODEs. Phase Plane. Qualitative Methods Contents 4.0 Basics of Matrices and Vectors 4.1 Systems of ODEs as Models 4.2 Basic Theory of Systems of ODEs 4.3 Constant-Coefficient Systems.
Chapter 4 Systems of ODEs. Phase Plane. Qualitative Methods Contents 4.0 Basics of Matrices and Vectors 4.1 Systems of ODEs as Models 4.2 Basic Theory of Systems of ODEs 4.3 Constant-Coefficient Systems.
a k 0, then k + 1 = 2 lim 1 + 1
 Math 7 - Midterm - Form A - Page From the desk of C. Davis Buenger. https://people.math.osu.edu/buenger.8/ Problem a) [3 pts] If lim a k = then a k converges. False: The divergence test states that if
Math 7 - Midterm - Form A - Page From the desk of C. Davis Buenger. https://people.math.osu.edu/buenger.8/ Problem a) [3 pts] If lim a k = then a k converges. False: The divergence test states that if
Math 215/255 Final Exam (Dec 2005)
") Exam (Dec 2005) Last Student #: First name: Signature: Circle your section #: Burggraf=0, Peterson=02, Khadra=03, Burghelea=04, Li=05 I have read and understood the instructions below: Please sign: Instructions:.
Exam (Dec 2005) Last Student #: First name: Signature: Circle your section #: Burggraf=0, Peterson=02, Khadra=03, Burghelea=04, Li=05 I have read and understood the instructions below: Please sign: Instructions:.
REUNotes08-ODEs May 30, Chapter Two. Differential Equations
 Chapter Two Differential Equations 4 CHAPTER 2 2.1 LINEAR EQUATIONS We consider ordinary differential equations of the following form dx = f(t, x). dt where x is either a real variable or a vector of several
Chapter Two Differential Equations 4 CHAPTER 2 2.1 LINEAR EQUATIONS We consider ordinary differential equations of the following form dx = f(t, x). dt where x is either a real variable or a vector of several
Mathematical Modeling I
 Mathematical Modeling I Dr. Zachariah Sinkala Department of Mathematical Sciences Middle Tennessee State University Murfreesboro Tennessee 37132, USA November 5, 2011 1d systems To understand more complex
Mathematical Modeling I Dr. Zachariah Sinkala Department of Mathematical Sciences Middle Tennessee State University Murfreesboro Tennessee 37132, USA November 5, 2011 1d systems To understand more complex
2D-Volterra-Lotka Modeling For 2 Species
 Majalat Al-Ulum Al-Insaniya wat - Tatbiqiya 2D-Volterra-Lotka Modeling For 2 Species Alhashmi Darah 1 University of Almergeb Department of Mathematics Faculty of Science Zliten Libya. Abstract The purpose
Majalat Al-Ulum Al-Insaniya wat - Tatbiqiya 2D-Volterra-Lotka Modeling For 2 Species Alhashmi Darah 1 University of Almergeb Department of Mathematics Faculty of Science Zliten Libya. Abstract The purpose
Math 216 First Midterm 19 October, 2017
 Math 6 First Midterm 9 October, 7 This sample exam is provided to serve as one component of your studying for this exam in this course. Please note that it is not guaranteed to cover the material that
Math 6 First Midterm 9 October, 7 This sample exam is provided to serve as one component of your studying for this exam in this course. Please note that it is not guaranteed to cover the material that
MATH 23 Exam 2 Review Solutions
 MATH 23 Exam 2 Review Solutions Problem 1. Use the method of reduction of order to find a second solution of the given differential equation x 2 y (x 0.1875)y = 0, x > 0, y 1 (x) = x 1/4 e 2 x Solution
MATH 23 Exam 2 Review Solutions Problem 1. Use the method of reduction of order to find a second solution of the given differential equation x 2 y (x 0.1875)y = 0, x > 0, y 1 (x) = x 1/4 e 2 x Solution
Dynamical Systems. August 13, 2013
 Dynamical Systems Joshua Wilde, revised by Isabel Tecu, Takeshi Suzuki and María José Boccardi August 13, 2013 Dynamical Systems are systems, described by one or more equations, that evolve over time.
Dynamical Systems Joshua Wilde, revised by Isabel Tecu, Takeshi Suzuki and María José Boccardi August 13, 2013 Dynamical Systems are systems, described by one or more equations, that evolve over time.
Solutions to Dynamical Systems 2010 exam. Each question is worth 25 marks.
 Solutions to Dynamical Systems exam Each question is worth marks [Unseen] Consider the following st order differential equation: dy dt Xy yy 4 a Find and classify all the fixed points of Hence draw the
Solutions to Dynamical Systems exam Each question is worth marks [Unseen] Consider the following st order differential equation: dy dt Xy yy 4 a Find and classify all the fixed points of Hence draw the
Math 1270 Honors ODE I Fall, 2008 Class notes # 14. x 0 = F (x; y) y 0 = G (x; y) u 0 = au + bv = cu + dv
 y 0 = G (x; y) u 0 = au + bv = cu + dv") Math 1270 Honors ODE I Fall, 2008 Class notes # 1 We have learned how to study nonlinear systems x 0 = F (x; y) y 0 = G (x; y) (1) by linearizing around equilibrium points. If (x 0 ; y 0 ) is an equilibrium
Math 1270 Honors ODE I Fall, 2008 Class notes # 1 We have learned how to study nonlinear systems x 0 = F (x; y) y 0 = G (x; y) (1) by linearizing around equilibrium points. If (x 0 ; y 0 ) is an equilibrium
Math 216 Final Exam 24 April, 2017
 Math 216 Final Exam 24 April, 2017 This sample exam is provided to serve as one component of your studying for this exam in this course. Please note that it is not guaranteed to cover the material that
Math 216 Final Exam 24 April, 2017 This sample exam is provided to serve as one component of your studying for this exam in this course. Please note that it is not guaranteed to cover the material that
Paper Specific Instructions
 Paper Specific Instructions. The examination is of 3 hours duration. There are a total of 60 questions carrying 00 marks. The entire paper is divided into three sections, A, B and C. All sections are compulsory.
Paper Specific Instructions. The examination is of 3 hours duration. There are a total of 60 questions carrying 00 marks. The entire paper is divided into three sections, A, B and C. All sections are compulsory.
CDS 101 Precourse Phase Plane Analysis and Stability
 CDS 101 Precourse Phase Plane Analysis and Stability Melvin Leok Control and Dynamical Systems California Institute of Technology Pasadena, CA, 26 September, 2002. mleok@cds.caltech.edu http://www.cds.caltech.edu/
CDS 101 Precourse Phase Plane Analysis and Stability Melvin Leok Control and Dynamical Systems California Institute of Technology Pasadena, CA, 26 September, 2002. mleok@cds.caltech.edu http://www.cds.caltech.edu/
Unit IV Derivatives 20 Hours Finish by Christmas
 Unit IV Derivatives 20 Hours Finish by Christmas Calculus There two main streams of Calculus: Differentiation Integration Differentiation is used to find the rate of change of variables relative to one
Unit IV Derivatives 20 Hours Finish by Christmas Calculus There two main streams of Calculus: Differentiation Integration Differentiation is used to find the rate of change of variables relative to one
Unit IV Derivatives 20 Hours Finish by Christmas
 Unit IV Derivatives 20 Hours Finish by Christmas Calculus There two main streams of Calculus: Differentiation Integration Differentiation is used to find the rate of change of variables relative to one
Unit IV Derivatives 20 Hours Finish by Christmas Calculus There two main streams of Calculus: Differentiation Integration Differentiation is used to find the rate of change of variables relative to one
Linearization of Differential Equation Models
 Linearization of Differential Equation Models 1 Motivation We cannot solve most nonlinear models, so we often instead try to get an overall feel for the way the model behaves: we sometimes talk about looking
Linearization of Differential Equation Models 1 Motivation We cannot solve most nonlinear models, so we often instead try to get an overall feel for the way the model behaves: we sometimes talk about looking
Classification of Phase Portraits at Equilibria for u (t) = f( u(t))
 = f( u(t))") Classification of Phase Portraits at Equilibria for u t = f ut Transfer of Local Linearized Phase Portrait Transfer of Local Linearized Stability How to Classify Linear Equilibria Justification of the
Classification of Phase Portraits at Equilibria for u t = f ut Transfer of Local Linearized Phase Portrait Transfer of Local Linearized Stability How to Classify Linear Equilibria Justification of the
6.3. Nonlinear Systems of Equations
 G. NAGY ODE November,.. Nonlinear Systems of Equations Section Objective(s): Part One: Two-Dimensional Nonlinear Systems. ritical Points and Linearization. The Hartman-Grobman Theorem. Part Two: ompeting
G. NAGY ODE November,.. Nonlinear Systems of Equations Section Objective(s): Part One: Two-Dimensional Nonlinear Systems. ritical Points and Linearization. The Hartman-Grobman Theorem. Part Two: ompeting
Appendix: A Computer-Generated Portrait Gallery
 Appendi: A Computer-Generated Portrait Galler There are a number of public-domain computer programs which produce phase portraits for 2 2 autonomous sstems. One has the option of displaing the trajectories
Appendi: A Computer-Generated Portrait Galler There are a number of public-domain computer programs which produce phase portraits for 2 2 autonomous sstems. One has the option of displaing the trajectories
One Dimensional Dynamical Systems
 16 CHAPTER 2 One Dimensional Dynamical Systems We begin by analyzing some dynamical systems with one-dimensional phase spaces, and in particular their bifurcations. All equations in this Chapter are scalar
16 CHAPTER 2 One Dimensional Dynamical Systems We begin by analyzing some dynamical systems with one-dimensional phase spaces, and in particular their bifurcations. All equations in this Chapter are scalar
You can learn more about the services offered by the teaching center by visiting
 MAC 232 Exam 3 Review Spring 209 This review, produced by the Broward Teaching Center, contains a collection of questions which are representative of the type you may encounter on the exam. Other resources
MAC 232 Exam 3 Review Spring 209 This review, produced by the Broward Teaching Center, contains a collection of questions which are representative of the type you may encounter on the exam. Other resources
DuVal High School Summer Review Packet AP Calculus
 DuVal High School Summer Review Packet AP Calculus Welcome to AP Calculus AB. This packet contains background skills you need to know for your AP Calculus. My suggestion is, you read the information and
DuVal High School Summer Review Packet AP Calculus Welcome to AP Calculus AB. This packet contains background skills you need to know for your AP Calculus. My suggestion is, you read the information and