Solving linear systems (6 lectures)
|
|
|
- Ambrose Stone
- 5 years ago
- Views:
Transcription
1 Chapter 2 Solving linear systems (6 lectures) 2.1 Solving linear systems: LU factorization (1 lectures) Reference: [Trefethen, Bau III] Lecture 20, 21 How do you solve Ax = b? (2.1.1) In numerical linear algebra, NEVER compute A 1 then A 1 b. Reason: very expensive! storage! less accurate! Gaussian elimination Basic idea: Example 1 (Gaussian elimination). Solve x 1 x 2 x 3 2 = 1. (2.1.2) 0
2 Gaussian elimination is the same as This gives rise to LU factorization = (2.1.3) x 1 x 2 x 3 x 1 x 2 x }{{}}{{} L U = 1 3 (2.1.4) 1 x 1 x 2 x 3 2 = 1 (2.1.5) 0 LUx = b (2.1.6) Solution: x 1 x 2 x 3 2 = 1 (2.1.7) LU factorization, forward/backward substitutions Exact solver (Gaussian elimination) of Ax = b is equivalent to: LU-factorize the matrix A: A = LU Solve Ly = b for intermediate solution y (forward substitution) Solve Ux = y for final solution x (backward substitution) We can derive the LU factorization based on the process of Gaussian elimination, as follows: 20
3 Algorithm 1 LU factorization 1: for k = 1,, n 1 do iterate over all rows 2: for i = k + 1,, n do iterate over all rows beneath row k 3: mult = a ik /a kk determine the multiplicative factor of row i (i > k) 4: a ik = mult form the k-th column of the lower triangular matrix 5: for j = k + 1,, n do iterate over all columns in a row 6: a ij = a ij mult a kj subtract the scaled row data and form the i-th row of the upper triangular matrix 7: end for 8: end for 9: end for Theorem 1 (LU factorization). A = LU, (2.1.8) where L= lower triangular matrix, unit diagonal; U= upper triangular matrix. In addition, 1 A (n-1) = mult U L= mult 1 We can also derive the forward substitution based on the process of Gaussian elimination, as follows: Algorithm 2 Forward substitution for Ly = b 1: for i = 1,, n do iterate over all rows 2: y i = b i 3: for j = 1,, i 1 do iterate over all (lower-triangular) columns in a row 4: y i = y i l ij y j solve for y i 5: end for 6: y i = y i /l ii skip this line if l ii = 1 7: end for 21
4 Exercise 1 (backward substitutions). Write down the algorithm for the backward substitution Ux = y Complexity Evaluate complexity by the number of FLOPs (floating point operations): +,,,. The complexity of LU factorization: From Algorithm 1, we have n 1 n n n 1 n n 1 2 = 2 (n i) = 2 (n i) 2 = 2 3 n3 + O(n 2 ), (2.1.9) i=1 k=i+1 j=i+1 i=1 i=1 k=i+1 where we have used n i = 1 n n(n + 1), 2 i=1 i=1 i 2 = 1 n(n + 1)(2n + 1). (2.1.10) 6 Exercise 2 (Forward/backward substitutions). Analyze the complexity of the forward substitution Ly = b and the backward substitution Ux = y. The overall complexity of the exact solver: 2 3 n3 + O(n 2 ). (2.1.11) Pivoting Example 2 (Instability of Gaussian elimination when a 11 = 0). Consider solving x x 2 = 6. (2.1.12) Since the pivot a 11 = 0, we cannot perform LU factorization! Example 3 (Partial pivoting). The solution for the instability issue is pivoting. Reorder the equations (the rows of A and the right hand side b), such that the largest among a i1 (i = 1, 2, 3) becomes the pivot x x 2 = 6. (2.1.13) x 3 x 3 22
5 x x 2 = (2.1.14) x 3 Next we perform Gaussian elimination on the red submatrix, which requires another pivoting! x x 2 = 1. (2.1.15) x Example 4 (Complete pivoting). Instead, reorder both the equations (the rows of A and b) and the unknowns (the columns of A and x), such that the largest among a ij (i = 1, 2, 3; j = 1, 2, 3) becomes the pivot. Remark 1 (Reordering) x 1 x 2 x 3 x 3 x 2 x 1 = Reordering the equations = reordering the rows of A and b (2.1.16) 8 6 = 1. (2.1.17) 8 Reordering the unknowns = reordering the columns of A and x. In general, after the (k 1)-th Gaussian elimination done a (k-1) kk 0 A (k-1) row k if the original pivot a (k 1) kk = 0 or a (k 1) kk 0, then pivoting is required. 23
6 Two possible pivoting strategies: Complete pivoting: Search the largest (absolute value) element in A (k 1), and pivot. Partial pivoting: Search the largest (absolute value) element in the column k of A (k 1), and pivot. In practice, we use partial pivoting, since complete pivoting is expensive, and does not yield much more gains! To summarize the essence of Gaussian elimination with partial pivoting: to: Exact solver (Gaussian elimination) of Ax = b with partial pivoting is equivalent Permutation of the rows of A: A P matrix = P A, where P is a certain permutation LU-factorize the matrix A P : A P = LU Solve Ly = b for intermediate solution y (forward substitution) Solve Ux = y for final solution x (backward substitution) Example 5 (Permutation matrix for partial pivoting). In Example 3, the permutation matrix is given by: 1 P = P 2 P 1 = = (2.1.18) The algorithm of LU factorization with partial pivoting is given as follows: 24
7 Algorithm 3 LU factorization with partial pivoting 1: for k = 1,, n 1 do iterate over all rows 2: Select i = arg max i k a ik 3: a k,k:m a i,k:m interchange row k and row i (upper triangular part) 4: a k,1:k 1 a i,1:k 1 interchange row k and row i (lower triangular part) 5: for i = k + 1,, n do iterate over all rows beneath row k 6: mult = a ik /a kk determine the multiplicative factor of row i (i > k) 7: a ik = mult form the k-th column of the lower triangular matrix 8: for j = k + 1,, n do iterate over all columns in a row 9: a ij = a ij mult a kj subtract the scaled row data and form the i-th row of the upper triangular matrix 10: end for 11: end for 12: end for When is pivoting unnecessary? However, in some situations, we can prove that pivoting is unnecessary. The following condition on A will ensure pivoting is not necessary and the LU factorization is always stable: A is symmetric positive definite (SPD), A is row diagonally dominant, or A is column diagonally dominant. Here we show that pivoting is unnecessary for SPD matrices. A quick review on SPD matrices can be found in the supplementary notes. Theorem 2 (Pivoting being unnecessary for SPD matrices). Suppose A is SPD. Then during Gaussian elimination, a (k 1) kk > 0. Proof. For simplicity, consider k = 1. Suppose ( A = 25 a 11 v v T B ) (2.1.19)
8 is SPD. Here a 11 is a number, v R n 1 and B R (n 1) (n 1). Then a 11 > 0. Now eliminate v using a 11 as pivot: ( ) ( ) a 11 v T a11 v T (2.1.20) v B 0 B vvt a 11 Hence the Gaussian elimination gives A (1) = B vvt a 11. (2.1.21) Next we will prove that A (1) is SPD. It is easy to see that A (1) is symmetric, so our focus is to prove that A (1) is PD. Let x R n 1 and ( ) y xt v a 11 R n (2.1.22) x Some straightforward algebra can show that y T Ay = x T ( Since A is PD, we have B vvt a 11 ) x = x T A (1) x. (2.1.23) y T Ay > 0 x T A (1) x > 0. (2.1.24) Hence, A (1) is PD. Then a (1) 22 > 0. k > 1 can be proved by in the same fashion (induction). Remark 2. You will prove that pivoting is unnecessary for row/column diagonally dominant matrices in your assignment. 26
9 2.2 Solving symmetric positive definite systems: Cholesky factorization (1 lectures) Reference: [Trefethen, Bau III] Lecture 23 The complexity of LU factorization is 2 3 n3, which is still very expensive! Consider a image. The dimension of the resulting linear system is n = The computational complexity is 10 18! Consider special linear systems: Exploit the special structure of linear systems More efficient LU factorization We will see in this lecture that Generic matrix: LU factorization = LDM T factorization. Symmetric matrix: LDL T factorization. Positive definite matrix: LDM T factorization, where D > 0. Symmetric positive definite matrix: LDL T factorization, where D > 0 Cholesky factorization (A = GG T ) Generic matrix: LDM T factorization Theorem 3 (LDM T factorization). If all the leading principal submatrices of A are nonsingular, then there exists unique unit lower triangular matrices L and M, and a unique diagonal matrix D, such that A = LDM T. (2.2.1) Proof. A = LU = LDD 1 U = LDM T, (2.2.2) where D is the diagonal part of U and M T = D 1 U (rescale each row such that it is unit diagonal). Remark 3. LDM T factorization is simply a variant of LU factorization. Nothing new! 27
10 2.2.2 Symmetric matrix: LDL T factorization Theorem 4 (LDL T factorization). If A is symmetric, then M = L, or equivalently, A = LDL T. (2.2.3) Proof. A = LDM T M 1 AM T = M 1 LDM T M T = M 1 LD Note that M 1 AM T is symmetric M 1 LD is symmetric. Note that both M and L are unit lower triangular M 1 L is unit lower triangular (why?) M 1 LD is lower triangular. Hence, M 1 LD is a diagonal matrix! M 1 L is a diagonal matrix! Note that M 1 L is unit lower triangular M 1 L is an identity matrix! M = L. Remark 4. Why matters? Save half the work by computing L and D only Positive definite (PD) matrix: LDM T factorization, where D > 0 Theorem 5 (LDM T factorization for PD). If A is PD, then for A = LDM T, D > 0. Proof. A = LDM T L 1 AL T = L 1 LDM T L T = DM T L T Note that L 1 AL T is PD DM T L T is PD. By Corollary 8, diag(dm T L T ) > 0. Note that both M and L are unit lower triangular M T L T is unit upper triangular (why?) diag(dm T L T ) = D. Hence, D > Symmetric positive definite (SPD) matrix: Cholesky factorization Symmetric matrix: PD matrix: A = LDM T M = L. (2.2.4) A = LDM T D > 0. (2.2.5) 28
11 Then SPD matrix: A = LDM T M = L, D > 0. (2.2.6) Rewrite: A = LDL T = LD 1 2 D 1 2 L T = (LD 1 2 )(LD 1 2 ) T = GG T. (2.2.7) This gives rise to Cholesky factorization where G is lower triangular. A = GG T, (2.2.8) Cholesky factorization algorithm Naively, LU factorization, and go through the process above Cholesky. But can we do Cholesky directly? The answer is yes! We can verify that ( α A = v If A is SPD, then B vvt α ) ( α ) ( v T 0 = B I v α I 0 0 B vvt α is SPD (exercise). Let ) ( α ) v T α. (2.2.9) 0 I B vvt α = G 1G T 1. (2.2.10) Then ( α ) ( α ) 0 v T A = α v = GG α G T. (2.2.11) 1 0 G T 1 This implies that we can perform Cholesky factorization recursively. Exercise 3. Prove that B vvt α is SPD. Hint: Check XT AX, where X ( ) 1 vt α. (2.2.12) 0 I You should get X T AX = ( ) α 0. (2.2.13) 0 B vvt α 29
12 Example 6 (Cholesky factorization). Based on (2.2.9), Cholesky factorize the following 3 3 matrix: A = (2.2.14) The answer is To summarize the Choleksy factorization: Algorithm 4 Cholesky factorization 3 G = 1 2 (2.2.15) : for k = 1,, n do Iterate from top to bottom along diagonal. 2: a kk = a kk Factor the diagonal element α. 3: for i = k + 1,, n do 4: a ik = a ik /a kk Update current column entries below the diagonal v = v/ α. 5: end for 6: for j = k + 1,, n do 7: for i = j,, n do 8: a ij = a ij a ik a jk Update the lower right block B = B vv T /α (below the diagonal only). 9: end for 10: end for 11: end for Complexity: The complexity of the Cholesky factorization is n O(n2 ). (2.2.16) Exercise 4. Verify the complexity. Remark 5. In order to solve Ax = b, after the Cholesky factorization A = GG T, we use forward/backward substitution to solve GG T x = b. 30
![2.3 From partial differential equations to sparse linear systems (1 lectures) Reference: [Saad] 2.1-2.2 2.3.1 Partial differential equations (PDEs) Three most basic linear partial differential equations (PDEs).](/docs-images/81/84213478/images/13-0.jpg "t: time. x, y: space. Wave equation: Solution: Figure: u t + au x = 0, u(x, 0) = sin(2πx). (2.3.1) u(x, t) = sin(2π(x at)). (2.3.2) 1.0 0.5 0.2 0.4 0.6 0.8 1.0-0.5-1.")
13 2.3 From partial differential equations to sparse linear systems (1 lectures) Reference: [Saad] Partial differential equations (PDEs) Three most basic linear partial differential equations (PDEs). t: time. x, y: space. Wave equation: Solution: Figure: u t + au x = 0, u(x, 0) = sin(2πx). (2.3.1) u(x, t) = sin(2π(x at)). (2.3.2) Heat equation: Solution: u t σu xx = 0, u(x, 0) = sin(kπx), u(0, t) = 0, u(1, t) = 0. k is an integer, (2.3.3) u(t, x) = e k2 π 2 σt sin(kπx). (2.3.4) 31
 sin(πy), inside (0, 1) (0, 1), u = 0, on the boundary of [0, 1] [0, 1]. (2.3.")
.")
14 Figure: Poisson equation: u xx + u yy = 2π 2 sin(πx) sin(πy), inside (0, 1) (0, 1), u = 0, on the boundary of [0, 1] [0, 1]. (2.3.5) Solution: Figure: u(x, y) = sin(πx) sin(πy). (2.3.6) Remark 6. In this course, we only discuss time-independent problems (boundary problems, steady state problems). Time dependent problems, or more generally, numerical techniques for all types of PDEs, AMATH 342, AMATH 442, AMATH 741 / CS 778. Remark 7. In general, difficult to find analytical solutions. Need numerical solutions! 32
15 D Poisson equation Consider solving steady heat distribution or electric potential on a line: u xx (x) = f(x), inside (0, 1), (2.3.7) u(0) = a, u(1) = b. (2.3.8) Idea: Continuous Discrete. Discretize the computational domain [0, 1] into a square grid. Find u(x) at each grid point. Finite difference discretization. Construct a grid: gives Grid size: m = 4 Grid spacing: h = 1 m+1 = 1 5. Grid coordinates: x 0 = 0, x 1 = 1 5, x 2 = 2 5, x 3 = 3 5, x 4 = 4 5, x 5 = 1. Right hand side: f(x 0 ), f(x 1 ), f(x 2 ), f(x 3 ), f(x 4 ), f(x 5 ), denoted as f 0, f 1, f 2, f 3, f 4, f 5. Our goal: Solve for the unknowns u(x 0 ), u(x 1 ), u(x 2 ), u(x 3 ), u(x 4 ), u(x 5 ), denoted as u 0, u 1, u 2, u 3, u 4, u 5. On the boundary, Equation (2.3.8) Inside 0 < x < 1, check Equation (2.3.7). u(0) = a, u(1) = b. (2.3.9) u 0 = a, u 5 = b. (2.3.10) 33
16 The 2nd derivative: On the grid, approximate it by u xx (x) = lim h 0 u(x h) 2u(x) + u(x + h) h 2. (2.3.11) u xx (x i ) u(x i h) 2u(x) + u(x i + h) h 2 = u i 1 2u i + u i+1 h 2, i = 1, 2, 3, 4. (2.3.12) Equation (2.3.7) becomes i = 1: Note that u 0 = a: i = 2: i = 3: i = 4: Note that u 5 = b: u xx (x) = f(x), inside (0, 1), (2.3.13) u i 1 + 2u i u i+1 h 2 = f i, i = 1, 2, 3, 4. (2.3.14) u 0 + 2u 1 u 2 h 2 = f 1, 2u 1 u 2 h 2 = f 1 + a h 2, u 1 + 2u 2 u 3 h 2 = f 2, u 2 + 2u 3 u 4 h 2 = f 3, u 3 + 2u 4 u 5 h 2 = f 4. u 3 + 2u 4 h 2 = f 4 + b h 2. 34
17 Align the unknowns: 2 h 2 u 1 1 h 2 u 2 = f 1 + a h 2, 1 h 2 u h 2 u 2 1 h 2 u 3 = f 2, 1 h 2 u h 2 u 3 1 h 2 u 4 = f 3, This gives a linear system: h h 2 u h 2 u 4 = f 4 + b h 2. u 1 u 2 u 3 u 4 (2.3.15) f 1 + a h 2 = f 2 f 3. (2.3.16) f 4 + b h 2 For general m, the discretization of Equation (2.3.7) gives rise to a linear system where the pattern is A = h , u = Au = f, (2.3.17) u 1 u 2 u 3. u m 1 u m Remark 8. The matrix A is SPD (see supplementary notes). Algorithm 5 1D discrete Laplacian 1: for i = 1,, n do 2: A i,i = 2/h 2 3: if i > 1 then 4: A i,i 1 = 1/h 2 5: end if 6: if i < m then 7: A i,i+1 = 1/h 2 8: end if 9: end for f 1 + a h 2 f 2 f 3, f =.. f m 1 f m + b h 2 (2.3.18) 35
18 D Poisson equation Consider solving steady heat distribution or electric potential in a squared box: u xx u yy = f, inside (0, 1) (0, 1), u = g, on the boundary of [0, 1] [0, 1]. (2.3.19) Idea: Continuous Discrete. Discretize the computational domain [0, 1] [0, 1] into a square grid. Find u(x, y) at each grid point (x, y). Finite difference discretization. Construct a grid: Grid size: m = 4 Grid spacing: h = 1 m+1 = 1 5. Grid coordinates (boundary excluded) (x 1, y 1 ), (x 1, y 2 ), (x 1, y 3 ), (x 1, y 4 ), (x 2, y 1 ), (x 2, y 2 ), (x 2, y 3 ), (x 2, y 4 ), (x 3, y 1 ), (x 3, y 2 ), (x 3, y 3 ), (x 3, y 4 ), (x 4, y 1 ), (x 4, y 2 ), (x 4, y 3 ), (x 4, y 4 ). (lexicographic order) Right hand side: f at these points, denoted as f 1,1, f 1,2,, f 4,4. Our goal: Solve for the unknowns u 1,1, u 1,2,, u 4,4. 36
19 Inside (0, 1) (0, 1), check Equation (2.3.19). The 2nd derivative: u xx (x, y) = lim h 0 u(x h, y) 2u(x, y) + u(x + h, y) h 2, (2.3.20) u yy (x, y) = lim h 0 u(x, y h) 2u(x, y) + u(x, y + h) h 2. (2.3.21) On the grid, approximate it by u xx (x i, y j ) u(x i h, y j ) 2u(x i, y j ) + u(x i + h, y j ) h 2 u yy (x i, y j ) u(x i, y j h) 2u(x i, y j ) + u(x i, y j + h) h 2 = u i 1,j 2u i,j + u i+1,j h 2, (2.3.22) = u i,j 1 2u i,j + u i,j+1 h 2. (2.3.23) PDE (2.3.19) can be approximated by u i 1,j + 2u i,j u i+1,j h 2 + u i,j 1 + 2u i,j u i,j+1 h 2 = f i,j, i, j = 1, 2, 3, 4. (2.3.24) 1 h 2 This gives a linear system: u 1,1 u 1,2 u 1,3 u 1,4 u 2,1 u 2,2 u 2,3 u 2,4 u 3,1 u 3,2 u 3,3 u 3,4 u 4,1 u 4,2 u 4,3 u 4,4 = f 1,1 +g 0,1 /h 2 +g 1,0 /h 2 f 1,2 +g 0,2 /h 2 f 1,3 +g 0,3 /h 2 f 1,4 +g 0,4 /h 2 +g 1,5 /h 2 f 2,1 +g 2,0 /h 2 f 2,2 f 2,3 f 2,4 +g 2,5 /h 2 f 3,1 +g 3,0 /h 2 f 3,2 f 3,3 f 3,4 +g 3,5 /h 2 f 4,1 +g 5,1 /h 2 +g 4,0 /h 2 f 4,2 +g 5,2 /h 2 f 4,3 +g 5,3 /h 2 f 4,4 +g 5,4 /h 2 +g 4,5 /h 2 (2.3.25) For general m, the discretization of Equation (2.3.7) gives rise to a linear system 37 Au = f, (2.3.26)
20 where the pattern is A = 1 h R m2 m 2. (2.3.27) For convenience, we write it into a block form: B 1 I A = 1 I B 2 I R m2 m 2, (2.3.28) h 2 I B m 1 I I B m where each block B i (i = 1,, m) reads B i = R m m. (2.3.29) Remark 9. By writing the matrix A in a block form, it becomes much easier to handle the boundary terms that are moved to the right hand side of the equation. Whenever a matrix entry falls outside a block or the full matrix, kill it (and move it to the right hand side). Remark 10. The matrix A is again, SPD (see supplementary notes). 38
21 Algorithm 6 2D discrete Laplacian 1: for i = 1,, m do 2: for j = 1,, m do 3: A m(i 1)+j, m(i 1)+j = 4/h 2 4: if i > 1 then 5: A m(i 1)+j, m(i 1 1)+j = 1/h 2 6: end if 7: if i < m then 8: A m(i 1)+j, m(i+1 1)+j = 1/h 2 9: end if 10: if j > 1 then 11: A m(i 1)+j, m(i 1)+j 1 = 1/h 2 12: end if 13: if j < m then 14: A m(i 1)+j, m(i 1)+j+1 = 1/h 2 15: end if 16: end for 17: end for Convection-diffusion equation Consider solving a steady state of the (fluid, gas) particles that allow diffusion and convection: u xx u yy + au x + bu y = f, inside (0, 1) (0, 1), u = g, on the boundary of [0, 1] [0, 1]. (2.3.30) In this case, we also need to consider approximating the first derivatives. Take u x (x, y) as example. There are three different possibilities: Central difference: u(x + h, y) u(x h, y) u x (x, y) = lim, (2.3.31) h 0 2h On the grid, approximate it by u x (x i, y j ) u(x i + h, y j ) u(x i h, y j ) 2h = u i+1,j u i 1,j. (2.3.32) 2h 39
22 Forward difference: u(x + h, y) u(x, y) u x (x, y) = lim, (2.3.33) h 0 h On the grid, approximate it by u x (x i, y j ) u(x i + h, y j ) u(x i, y j ) h = u i+1,j u i,j. (2.3.34) h Backward difference: u(x, y) u(x h, y) u x (x, y) = lim, (2.3.35) h 0 h On the grid, approximate it by u x (x i, y j ) u(x i, y j ) u(x i h, y j ) h = u i,j u i 1,j. (2.3.36) h For stability reasons, we choose forward/backward differences, depending on the signs of a and b. When a > 0 and b > 0, use backward differences for u x and u y. Hence, PDE (2.3.30) can be approximated by u i 1,j + 2u i,j u i+1,j h 2 This gives rise to a linear system + u i,j 1 + 2u i,j u i,j+1 +a u i,j u i 1,j +b u i,j u i,j 1 = f h 2 i,j. h h (2.3.37) Au = f, (2.3.38) where the full matrix is B 1 I A = 1 (1 + ah)i B 2 I , (2.3.39) h 2 (1 + ah)i B m 1 I (1 + ah)i B m 40
23 and the submatrices are 4 + ah + bh 1 (1 + bh) 4 + ah + bh 1 B i = (2.3.40) (1 + bh) 4 + ah + bh 1 (1 + bh) 4 + ah + bh Exercise 5. When a > 0, b < 0, for stability reason, we use backward difference for u x and forward difference for u y : u i 1,j + 2u i,j u i+1,j h 2 Write down the matrix A. + u i,j 1 + 2u i,j u i,j+1 +a u i,j u i 1,j +b u i+1,j u i,j = f h 2 i,j. h h (2.3.41) Remark 11. This course does not require you to know how to discretize the PDEs. It is a very complicated subject and research topic indeed! (AMATH 342, AMATH 442, AMATH 741 / CS 778). The requirement is that once a PDE expert tells you how to discretize the PDEs, you can write down the resulting linear system Au = f. In general, a discretization of partial differential equation gives rise to a band system, or more generally, a sparse linear system. 41
24 2.4 Solving sparse systems (2 lectures) Reference: [Saad] We have seen that PDE discretization gives rise to a sparse linear system, or more precisely, band linear system LU factorization of band systems A general form of band systems with upper bandwidth q and lower bandwidth p: A =. (2.4.1) Example 7 (Band system) A = (2.4.2) We have q = 1, p = 2. Example 8 (1D Poisson matrix). We have p = q = A = h (2.4.3)
25 Example 9 (2D Poisson matrix). A = 1 h (2.4.4) We have p = q = m (Note that the size of the matrix A is m 2 m 2 ). Theorem 6 (LU factorization of a band system). If A has upper bandwidth q and lower bandwidth p, then for A = LU, U has upper bandwidth q and L has lower bandwidth p. = Algorithm 7 LU factorization for band system 1: for k = 1,, n 1 do iterate over all rows 2: for i = k + 1,, min(k + p, n) do iterate over all rows beneath row k and above row min(k + p, n). 3: mult = a ik /a kk determine the multiplicative factor of row i 4: a ik = mult form the k-th column of the lower triangular matrix 5: for j = k + 1,, min(k + q, n) do iterate between the (k + 1)-th column and the min(k + q, n)-th column in a row 6: a ij = a ij mult a kj subtract the scaled row data and form the k-th row of the upper triangular matrix 7: end for 8: end for 9: end for 43
26 Complexity: If n p and n q, then the computational complexity 2npq. Exercise 6. Verify the complexity. Remark 12. Compared to 2 3 n3 for generic LU, band LU is much faster! Issues with sparse systems Band matrices are only special instances of sparse matrices. Consider more general sparse matrices. Something we can do: Usually a constant number of non-zeros per row, or O(n) non-zeros in total. O(n) storage of a sparse matrix: CRS (compressed row storage) In LU factorization, skip all the zero entries when computing However, there are still issues! Example 10 (Arrow matrix). Consider solving a ij = a ij a ik a kk a kj. (2.4.5) Ax = b, (2.4.6) where A is an arrow matrix: A = (2.4.7) The LU factorization of A: 1 1 = (2.4.8) 44
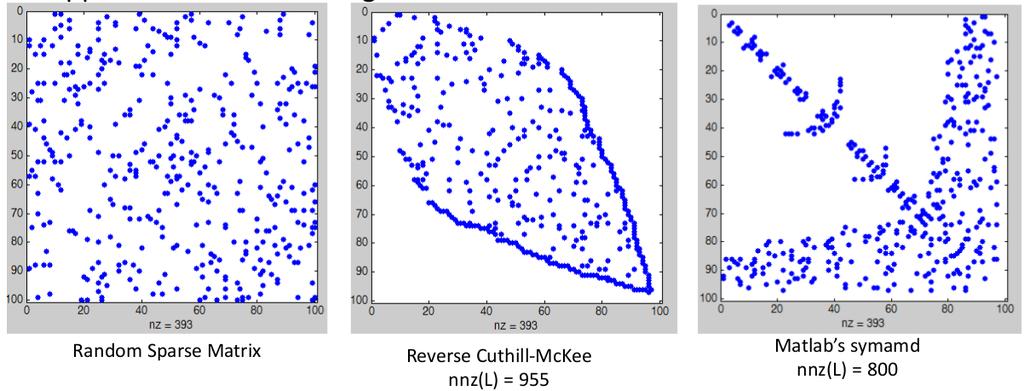
27 L and U are dense! Storage: O(n 2 ). Cost: O(n 3 ). Bad! However, if we reorder both the unknowns (the column of A) and the equations (the row of A): A P x P = b P (2.4.9) then 1 1 A P = = (2.4.10) Example 11 (2D Poisson matrix with m x < m y ). Consider Poisson matrix with m x < m y. Total number of grid points is n = m x m y. x-axis first, y-axis second: Band width is m x. Computational cost is O(m 2 xn). y-axis first, x-axis second: Band width is m y. Computational cost is O(m 2 yn). A sparse matrix A can still result in dense L and U. The ordering of the sparse matrix A can dramatically affect the sparsity of the resulting L and U Graph representation of matrices Our goal: reordering helps reducing storage and computational cost. Our tool: graph representation of matrices. A sparse matrix A can be represented by a graph. If a i,j 0, then there exists an edge from node i to j. 45
28 Example 12 (Graph representation). A = (2.4.11) Example 13 (Graph representation). Graph representation for 1D and 2D Poisson matrices: The graph of matrix with symmetric structure remains unchanged under reordering. The graph structure often has a physical or geometrical interpretation on the systems. What does Gaussian elimination do with the graph? Example 14 (Graph representation). 0 0 (2.4.12) 46
29 Gaussian elimination of the node i deletes node i and all the edges it connects, and creates new edge from j to k within the remaining subgraph if there is a fill-in at (j, k) Ordering algorithm (I): Cuthill-McKee ordering Idea: In each row, the fillings of L only occur between the first non-zero in the row and the diagonal. Keep the envelop as close to the diagonal as possible. Try to label the nodes such that the labels of the graph neighbors are as close as possible. 47

. 48")
30 Algorithm 8 Cuthill-McKee ordering 1: Pick starting node 2: for i = 1,, n do 3: Find all unnumbered neighbors of node i 4: Label them in order of degree (smallest first) 5: end for 6: Reverse Cuthill-McKee: node i node n i+1, i = 1,, n. The reverse order is better! Example 15 (Cuthill-McKee ordering). 48
. CM ordering: 1-A, 2-G, 3-B, 4-C, 5-D, 6-E, 7-F.")
31 Example 16 (Cuthill-McKee ordering). Example 17 (Why reversed order is better?). CM ordering: 1-g, 2-h, 3-e, 4-b, 5-f, 6-c, 7-j, 8-a, 9-d, 10-i. RCM ordering: 1-i, 2-d, 3-a, 4-j, 5-c, 6-f, 7-b, 8-e, 9-h, 10-g. Example 18 (Why reversed order is better?). CM ordering: 1-A, 2-G, 3-B, 4-C, 5-D, 6-E, 7-F. Reversed CM ordering: 1-F, 2-E, 3-D, 4-C, 5-B, 6-G, 7-A. 49
32 Remark 13. Reverse ordering tends to create a matrix A that is similar to the low-fill downward arrow matrix. Remark 14. RCM does not necessarily produce an optimal ordering. Indeed, producing optimal ordering is NP-complete problem Ordering algorithm (II-1): Local strategy (optional) Local strategy, idea: After k steps of Gaussian elimination done row (k+1) 0 A (k) The worst case fill-ins for the current k-th step of Gaussian elimination A (k) = A (k) = (2.4.13) (2.4.14) Markowitz products: the worst case fill-in if a (k) i,j (r (k) i is pivoted is given by 1)(c (k) j 1), (2.4.15) 50
33 where r (k) i (or c (k) i ): number of non-zero entries in row i (or column j) of A (k). Objective: Minimize worst case fill-ins for the current k-th step Gaussian elimination find (i, j) that has the minimum Markowitz product! min k+1 i,j n (r(k) i 1)(c (k) j 1). (2.4.16) Implementation of pivoting: Pick a (k) i,j that has the minimum Markowitz product, and swap it into the top-left position of A (k). Example 19 (Markowitz products). a b c d e A = f g h i 3 0 (2.4.17) Note that a 44 = i has a Markowitz product of 0. It means that using it as pivot introduces no fill at all! Hence, we pick a 44 and swap it into the top-left position of A: a b c a b c i h d e f g d e f g a b c (2.4.18) d e h i i h f g Ordering algorithm (II-2): Minimum degree ordering Consider local strategy for symmetric case. Then Thus, it suffices to find rather than (2.4.16), and use a (k) ii min r (k) i = min c (k) j (2.4.19) min k+1 i n (r(k) i 1) (2.4.20) as the pivot. Example 20 (Markowitz products for symmetric matrix). 51 (2.4.21)
34 Graph of this matrix: In fact, evaluating (2.4.20) is equivalent to choosing i that has the minimum degree as the pivot! Minimum degree ordering: At the k-th step, choose the node with minimum degree! Algorithm 9 Minimum degree ordering 1: for k = 1,, n do 2: Number the node with (current) least degree. 3: Remove the node and its edges. 4: Add new edges connecting all its neighbors together. corresponding to fill-in 5: end for Remark 15. Possible strategies for tie breaking: Select the node with smallest node number in the original ordering. Pre-order with RCM Example 21 (Minimum degree ordering). A = LU (2.4.22) 52
. Not the end of the story.")
35 Original ordering: 1-A, 2-B, 3-C, 4-D, 5-E, 6-F, 7-G. Minimum degree ordering: 1-A, 2-C, 3-D, 4-E, 5-B, 6-F, 7-G. A P = LU (2.4.23) Remark 16. Minimum degree ordering is a local strategy. No guarantee that it will produce the global minimum fill-ins. Example 22 (Not global minimum fill-ins). Not the end of the story. Matlab s symamd (symmetric approximate minimum degree permutation) can do even better! 53
36 54
 Image denoising Images often contain random")

37 Yangang Chen, U Waterloo CS 475/675 Notes, Spring 2017 Application: Image denoising (1 lectures) Image denoising Images often contain random noise (small errors), which may result from e.g. the sensors, the capture process, or conditions under which it was captured. Often there is enough signal amidst the noise that we can try to recover a version with the noise removed/reduced. Image denoising: given some observations, reconstruct the source/factors that generated them. 55
, in order to eliminate/reduce noise in the solution, or, to minimize the total fluctuation of the pixel values, R(u): min R(u), (2.5.")
38 2.5.2 Mathematical formulation We treat (grayscale) images as 2D scalar functions: u i,j = pixel intensity value at row i, column j Mathematical formulation: given observed image u 0, and true underlying image u, find an approximation of u (u u), in order to eliminate/reduce noise in the solution, or, to minimize the total fluctuation of the pixel values, R(u): min R(u), (2.5.1) u and preserve as much information as possible min u u u = min u u(x) u 0 (x) 2 dx. (2.5.2) 56
39 Image denoising is a trade-off between (2.5.1) and (2.5.2). The optimization problem is given by ( ) min αr(u) + u u (2.5.3) u α is a user-specified parameter. α 0: u u 0. α : u constant. We want something between. So, how do we characterize the total fluctuation of the pixel values, R(u)? Attempt 1: Laplacian regularization Choose R(u) = u 2 2 = u 2 dx. (2.5.4) The optimization (2.5.3) becomes The Euler-Lagrange equation gives us ( ) min α u u u (2.5.5) u α 2 u + u u 0 = 0. (2.5.6) α 2 u + u = u 0. (2.5.7) This is very similar to the 2D Poisson equation. Use finite difference α 4u i,j u i 1,j u i+1,j u i,j 1 u i,j+1 h 2 + u i,j = (u 0 ) i,j. (2.5.8) This gives a linear system: (αa + I)u = u 0. (2.5.9) 57
 Remark 17 (How does it work?). The coefficients c in characterizes the degree of smoothing! ( ) 1 α u u u + u = u 0. (2.5.13) α (c u) + u = u 0 (2.5.14) depend on gradients in the solution nonlin- For (2.")
40 2.5.4 Attempt 2: Total variation regularization Choose L 1 norm instead of L 2 norm: R(u) = u 2 1 = u dx. (2.5.10) The optimization (2.5.3) becomes ( ) min α u u u (2.5.11) u The Euler-Lagrange equation gives us ( ) 1 α u u + u u 0 = 0. (2.5.12) Remark 17 (How does it work?). The coefficients c in characterizes the degree of smoothing! ( ) 1 α u u u + u = u 0. (2.5.13) α (c u) + u = u 0 (2.5.14) depend on gradients in the solution nonlin- For (2.5.13), the coefficients c = 1 ear PDE. u Near edge: u is large, c = 1 is small, small degree of smoothing. u Flat region: u is small, c = 1 is large, large degree of smoothing. u Previous approach is roughly the same, but with the coefficients c = 1. 58
 Unlike the previous example, the matrix A depends on u. So it is a nonlinear system of equations.")
 1: Pick u (0).")
41 We can again apply finite difference and obtain a system of equations (αa(u) + I)u = u 0. (2.5.15) Unlike the previous example, the matrix A depends on u. So it is a nonlinear system of equations. A simple approach to nonlinear equations is fixed point iteration: Freeze the coefficients to make the equations linear, solve, update, and repeat. Algorithm 10 Fixed point iteration for (2.5.15) 1: Pick u (0). 2: for k = 1, 2, until convergence do 3: Solve (αa(u (k 1) ) + I)u (k) = u 0 4: end for Results: 59
42 60
Scientific Computing
 Scientific Computing Direct solution methods Martin van Gijzen Delft University of Technology October 3, 2018 1 Program October 3 Matrix norms LU decomposition Basic algorithm Cost Stability Pivoting Pivoting
Scientific Computing Direct solution methods Martin van Gijzen Delft University of Technology October 3, 2018 1 Program October 3 Matrix norms LU decomposition Basic algorithm Cost Stability Pivoting Pivoting
Direct Methods for Solving Linear Systems. Simon Fraser University Surrey Campus MACM 316 Spring 2005 Instructor: Ha Le
 Direct Methods for Solving Linear Systems Simon Fraser University Surrey Campus MACM 316 Spring 2005 Instructor: Ha Le 1 Overview General Linear Systems Gaussian Elimination Triangular Systems The LU Factorization
Direct Methods for Solving Linear Systems Simon Fraser University Surrey Campus MACM 316 Spring 2005 Instructor: Ha Le 1 Overview General Linear Systems Gaussian Elimination Triangular Systems The LU Factorization
Numerical Linear Algebra
 Numerical Linear Algebra Decompositions, numerical aspects Gerard Sleijpen and Martin van Gijzen September 27, 2017 1 Delft University of Technology Program Lecture 2 LU-decomposition Basic algorithm Cost
Numerical Linear Algebra Decompositions, numerical aspects Gerard Sleijpen and Martin van Gijzen September 27, 2017 1 Delft University of Technology Program Lecture 2 LU-decomposition Basic algorithm Cost
Program Lecture 2. Numerical Linear Algebra. Gaussian elimination (2) Gaussian elimination. Decompositions, numerical aspects
 Gaussian elimination. Decompositions, numerical aspects") Numerical Linear Algebra Decompositions, numerical aspects Program Lecture 2 LU-decomposition Basic algorithm Cost Stability Pivoting Cholesky decomposition Sparse matrices and reorderings Gerard Sleijpen
Numerical Linear Algebra Decompositions, numerical aspects Program Lecture 2 LU-decomposition Basic algorithm Cost Stability Pivoting Cholesky decomposition Sparse matrices and reorderings Gerard Sleijpen
LU Factorization. Marco Chiarandini. DM559 Linear and Integer Programming. Department of Mathematics & Computer Science University of Southern Denmark
 DM559 Linear and Integer Programming LU Factorization Marco Chiarandini Department of Mathematics & Computer Science University of Southern Denmark [Based on slides by Lieven Vandenberghe, UCLA] Outline
DM559 Linear and Integer Programming LU Factorization Marco Chiarandini Department of Mathematics & Computer Science University of Southern Denmark [Based on slides by Lieven Vandenberghe, UCLA] Outline
Gaussian Elimination and Back Substitution
 Jim Lambers MAT 610 Summer Session 2009-10 Lecture 4 Notes These notes correspond to Sections 31 and 32 in the text Gaussian Elimination and Back Substitution The basic idea behind methods for solving
Jim Lambers MAT 610 Summer Session 2009-10 Lecture 4 Notes These notes correspond to Sections 31 and 32 in the text Gaussian Elimination and Back Substitution The basic idea behind methods for solving
Scientific Computing with Case Studies SIAM Press, Lecture Notes for Unit VII Sparse Matrix
 Scientific Computing with Case Studies SIAM Press, 2009 http://www.cs.umd.edu/users/oleary/sccswebpage Lecture Notes for Unit VII Sparse Matrix Computations Part 1: Direct Methods Dianne P. O Leary c 2008
Scientific Computing with Case Studies SIAM Press, 2009 http://www.cs.umd.edu/users/oleary/sccswebpage Lecture Notes for Unit VII Sparse Matrix Computations Part 1: Direct Methods Dianne P. O Leary c 2008
AMS526: Numerical Analysis I (Numerical Linear Algebra for Computational and Data Sciences)
") AMS526: Numerical Analysis I (Numerical Linear Algebra for Computational and Data Sciences) Lecture 19: Computing the SVD; Sparse Linear Systems Xiangmin Jiao Stony Brook University Xiangmin Jiao Numerical
AMS526: Numerical Analysis I (Numerical Linear Algebra for Computational and Data Sciences) Lecture 19: Computing the SVD; Sparse Linear Systems Xiangmin Jiao Stony Brook University Xiangmin Jiao Numerical
5.1 Banded Storage. u = temperature. The five-point difference operator. uh (x, y + h) 2u h (x, y)+u h (x, y h) uh (x + h, y) 2u h (x, y)+u h (x h, y)
 2u h (x, y)+u h (x, y h) uh (x + h, y) 2u h (x, y)+u h (x h, y)") 5.1 Banded Storage u = temperature u= u h temperature at gridpoints u h = 1 u= Laplace s equation u= h u = u h = grid size u=1 The five-point difference operator 1 u h =1 uh (x + h, y) 2u h (x, y)+u h
5.1 Banded Storage u = temperature u= u h temperature at gridpoints u h = 1 u= Laplace s equation u= h u = u h = grid size u=1 The five-point difference operator 1 u h =1 uh (x + h, y) 2u h (x, y)+u h
1 Multiply Eq. E i by λ 0: (λe i ) (E i ) 2 Multiply Eq. E j by λ and add to Eq. E i : (E i + λe j ) (E i )
 (E i ) 2 Multiply Eq. E j by λ and add to Eq. E i : (E i + λe j ) (E i )") Direct Methods for Linear Systems Chapter Direct Methods for Solving Linear Systems Per-Olof Persson persson@berkeleyedu Department of Mathematics University of California, Berkeley Math 18A Numerical
Direct Methods for Linear Systems Chapter Direct Methods for Solving Linear Systems Per-Olof Persson persson@berkeleyedu Department of Mathematics University of California, Berkeley Math 18A Numerical
AMS526: Numerical Analysis I (Numerical Linear Algebra)
") AMS526: Numerical Analysis I (Numerical Linear Algebra) Lecture 12: Gaussian Elimination and LU Factorization Xiangmin Jiao SUNY Stony Brook Xiangmin Jiao Numerical Analysis I 1 / 10 Gaussian Elimination
AMS526: Numerical Analysis I (Numerical Linear Algebra) Lecture 12: Gaussian Elimination and LU Factorization Xiangmin Jiao SUNY Stony Brook Xiangmin Jiao Numerical Analysis I 1 / 10 Gaussian Elimination
Math 471 (Numerical methods) Chapter 3 (second half). System of equations
 Chapter 3 (second half). System of equations") Math 47 (Numerical methods) Chapter 3 (second half). System of equations Overlap 3.5 3.8 of Bradie 3.5 LU factorization w/o pivoting. Motivation: ( ) A I Gaussian Elimination (U L ) where U is upper triangular
Math 47 (Numerical methods) Chapter 3 (second half). System of equations Overlap 3.5 3.8 of Bradie 3.5 LU factorization w/o pivoting. Motivation: ( ) A I Gaussian Elimination (U L ) where U is upper triangular
Computational Methods. Systems of Linear Equations
 Computational Methods Systems of Linear Equations Manfred Huber 2010 1 Systems of Equations Often a system model contains multiple variables (parameters) and contains multiple equations Multiple equations
Computational Methods Systems of Linear Equations Manfred Huber 2010 1 Systems of Equations Often a system model contains multiple variables (parameters) and contains multiple equations Multiple equations
CS412: Lecture #17. Mridul Aanjaneya. March 19, 2015
 CS: Lecture #7 Mridul Aanjaneya March 9, 5 Solving linear systems of equations Consider a lower triangular matrix L: l l l L = l 3 l 3 l 33 l n l nn A procedure similar to that for upper triangular systems
CS: Lecture #7 Mridul Aanjaneya March 9, 5 Solving linear systems of equations Consider a lower triangular matrix L: l l l L = l 3 l 3 l 33 l n l nn A procedure similar to that for upper triangular systems
LU Factorization. LU factorization is the most common way of solving linear systems! Ax = b LUx = b
 AM 205: lecture 7 Last time: LU factorization Today s lecture: Cholesky factorization, timing, QR factorization Reminder: assignment 1 due at 5 PM on Friday September 22 LU Factorization LU factorization
AM 205: lecture 7 Last time: LU factorization Today s lecture: Cholesky factorization, timing, QR factorization Reminder: assignment 1 due at 5 PM on Friday September 22 LU Factorization LU factorization
7. LU factorization. factor-solve method. LU factorization. solving Ax = b with A nonsingular. the inverse of a nonsingular matrix
 EE507 - Computational Techniques for EE 7. LU factorization Jitkomut Songsiri factor-solve method LU factorization solving Ax = b with A nonsingular the inverse of a nonsingular matrix LU factorization
EE507 - Computational Techniques for EE 7. LU factorization Jitkomut Songsiri factor-solve method LU factorization solving Ax = b with A nonsingular the inverse of a nonsingular matrix LU factorization
AMS 209, Fall 2015 Final Project Type A Numerical Linear Algebra: Gaussian Elimination with Pivoting for Solving Linear Systems
 AMS 209, Fall 205 Final Project Type A Numerical Linear Algebra: Gaussian Elimination with Pivoting for Solving Linear Systems. Overview We are interested in solving a well-defined linear system given
AMS 209, Fall 205 Final Project Type A Numerical Linear Algebra: Gaussian Elimination with Pivoting for Solving Linear Systems. Overview We are interested in solving a well-defined linear system given
CME 302: NUMERICAL LINEAR ALGEBRA FALL 2005/06 LECTURE 6
 CME 302: NUMERICAL LINEAR ALGEBRA FALL 2005/06 LECTURE 6 GENE H GOLUB Issues with Floating-point Arithmetic We conclude our discussion of floating-point arithmetic by highlighting two issues that frequently
CME 302: NUMERICAL LINEAR ALGEBRA FALL 2005/06 LECTURE 6 GENE H GOLUB Issues with Floating-point Arithmetic We conclude our discussion of floating-point arithmetic by highlighting two issues that frequently
30.3. LU Decomposition. Introduction. Prerequisites. Learning Outcomes
 LU Decomposition 30.3 Introduction In this Section we consider another direct method for obtaining the solution of systems of equations in the form AX B. Prerequisites Before starting this Section you
LU Decomposition 30.3 Introduction In this Section we consider another direct method for obtaining the solution of systems of equations in the form AX B. Prerequisites Before starting this Section you
Review of matrices. Let m, n IN. A rectangle of numbers written like A =
 Review of matrices Let m, n IN. A rectangle of numbers written like a 11 a 12... a 1n a 21 a 22... a 2n A =...... a m1 a m2... a mn where each a ij IR is called a matrix with m rows and n columns or an
Review of matrices Let m, n IN. A rectangle of numbers written like a 11 a 12... a 1n a 21 a 22... a 2n A =...... a m1 a m2... a mn where each a ij IR is called a matrix with m rows and n columns or an
Numerical Methods - Numerical Linear Algebra
 Numerical Methods - Numerical Linear Algebra Y. K. Goh Universiti Tunku Abdul Rahman 2013 Y. K. Goh (UTAR) Numerical Methods - Numerical Linear Algebra I 2013 1 / 62 Outline 1 Motivation 2 Solving Linear
Numerical Methods - Numerical Linear Algebra Y. K. Goh Universiti Tunku Abdul Rahman 2013 Y. K. Goh (UTAR) Numerical Methods - Numerical Linear Algebra I 2013 1 / 62 Outline 1 Motivation 2 Solving Linear
Next topics: Solving systems of linear equations
 Next topics: Solving systems of linear equations 1 Gaussian elimination (today) 2 Gaussian elimination with partial pivoting (Week 9) 3 The method of LU-decomposition (Week 10) 4 Iterative techniques:
Next topics: Solving systems of linear equations 1 Gaussian elimination (today) 2 Gaussian elimination with partial pivoting (Week 9) 3 The method of LU-decomposition (Week 10) 4 Iterative techniques:
Gaussian Elimination without/with Pivoting and Cholesky Decomposition
 Gaussian Elimination without/with Pivoting and Cholesky Decomposition Gaussian Elimination WITHOUT pivoting Notation: For a matrix A R n n we define for k {,,n} the leading principal submatrix a a k A
Gaussian Elimination without/with Pivoting and Cholesky Decomposition Gaussian Elimination WITHOUT pivoting Notation: For a matrix A R n n we define for k {,,n} the leading principal submatrix a a k A
9. Numerical linear algebra background
 Convex Optimization Boyd & Vandenberghe 9. Numerical linear algebra background matrix structure and algorithm complexity solving linear equations with factored matrices LU, Cholesky, LDL T factorization
Convex Optimization Boyd & Vandenberghe 9. Numerical linear algebra background matrix structure and algorithm complexity solving linear equations with factored matrices LU, Cholesky, LDL T factorization
ECE133A Applied Numerical Computing Additional Lecture Notes
 Winter Quarter 2018 ECE133A Applied Numerical Computing Additional Lecture Notes L. Vandenberghe ii Contents 1 LU factorization 1 1.1 Definition................................. 1 1.2 Nonsingular sets
Winter Quarter 2018 ECE133A Applied Numerical Computing Additional Lecture Notes L. Vandenberghe ii Contents 1 LU factorization 1 1.1 Definition................................. 1 1.2 Nonsingular sets
AMS526: Numerical Analysis I (Numerical Linear Algebra)
") AMS526: Numerical Analysis I (Numerical Linear Algebra) Lecture 3: Positive-Definite Systems; Cholesky Factorization Xiangmin Jiao Stony Brook University Xiangmin Jiao Numerical Analysis I 1 / 11 Symmetric
AMS526: Numerical Analysis I (Numerical Linear Algebra) Lecture 3: Positive-Definite Systems; Cholesky Factorization Xiangmin Jiao Stony Brook University Xiangmin Jiao Numerical Analysis I 1 / 11 Symmetric
Linear Algebra Section 2.6 : LU Decomposition Section 2.7 : Permutations and transposes Wednesday, February 13th Math 301 Week #4
 Linear Algebra Section. : LU Decomposition Section. : Permutations and transposes Wednesday, February 1th Math 01 Week # 1 The LU Decomposition We learned last time that we can factor a invertible matrix
Linear Algebra Section. : LU Decomposition Section. : Permutations and transposes Wednesday, February 1th Math 01 Week # 1 The LU Decomposition We learned last time that we can factor a invertible matrix
The Solution of Linear Systems AX = B
 Chapter 2 The Solution of Linear Systems AX = B 21 Upper-triangular Linear Systems We will now develop the back-substitution algorithm, which is useful for solving a linear system of equations that has
Chapter 2 The Solution of Linear Systems AX = B 21 Upper-triangular Linear Systems We will now develop the back-substitution algorithm, which is useful for solving a linear system of equations that has
Numerical Linear Algebra Primer. Ryan Tibshirani Convex Optimization /36-725
 Numerical Linear Algebra Primer Ryan Tibshirani Convex Optimization 10-725/36-725 Last time: proximal gradient descent Consider the problem min g(x) + h(x) with g, h convex, g differentiable, and h simple
Numerical Linear Algebra Primer Ryan Tibshirani Convex Optimization 10-725/36-725 Last time: proximal gradient descent Consider the problem min g(x) + h(x) with g, h convex, g differentiable, and h simple
Lecture 12 (Tue, Mar 5) Gaussian elimination and LU factorization (II)
 Gaussian elimination and LU factorization (II)") Math 59 Lecture 2 (Tue Mar 5) Gaussian elimination and LU factorization (II) 2 Gaussian elimination - LU factorization For a general n n matrix A the Gaussian elimination produces an LU factorization if
Math 59 Lecture 2 (Tue Mar 5) Gaussian elimination and LU factorization (II) 2 Gaussian elimination - LU factorization For a general n n matrix A the Gaussian elimination produces an LU factorization if
Numerical Methods I Solving Square Linear Systems: GEM and LU factorization
 Numerical Methods I Solving Square Linear Systems: GEM and LU factorization Aleksandar Donev Courant Institute, NYU 1 donev@courant.nyu.edu 1 MATH-GA 2011.003 / CSCI-GA 2945.003, Fall 2014 September 18th,
Numerical Methods I Solving Square Linear Systems: GEM and LU factorization Aleksandar Donev Courant Institute, NYU 1 donev@courant.nyu.edu 1 MATH-GA 2011.003 / CSCI-GA 2945.003, Fall 2014 September 18th,
Matrix Factorization and Analysis
 Chapter 7 Matrix Factorization and Analysis Matrix factorizations are an important part of the practice and analysis of signal processing. They are at the heart of many signal-processing algorithms. Their
Chapter 7 Matrix Factorization and Analysis Matrix factorizations are an important part of the practice and analysis of signal processing. They are at the heart of many signal-processing algorithms. Their
CHAPTER 6. Direct Methods for Solving Linear Systems
 CHAPTER 6 Direct Methods for Solving Linear Systems. Introduction A direct method for approximating the solution of a system of n linear equations in n unknowns is one that gives the exact solution to
CHAPTER 6 Direct Methods for Solving Linear Systems. Introduction A direct method for approximating the solution of a system of n linear equations in n unknowns is one that gives the exact solution to
MATH 3511 Lecture 1. Solving Linear Systems 1
 MATH 3511 Lecture 1 Solving Linear Systems 1 Dmitriy Leykekhman Spring 2012 Goals Review of basic linear algebra Solution of simple linear systems Gaussian elimination D Leykekhman - MATH 3511 Introduction
MATH 3511 Lecture 1 Solving Linear Systems 1 Dmitriy Leykekhman Spring 2012 Goals Review of basic linear algebra Solution of simple linear systems Gaussian elimination D Leykekhman - MATH 3511 Introduction
5.6. PSEUDOINVERSES 101. A H w.
 5.6. PSEUDOINVERSES 0 Corollary 5.6.4. If A is a matrix such that A H A is invertible, then the least-squares solution to Av = w is v = A H A ) A H w. The matrix A H A ) A H is the left inverse of A and
5.6. PSEUDOINVERSES 0 Corollary 5.6.4. If A is a matrix such that A H A is invertible, then the least-squares solution to Av = w is v = A H A ) A H w. The matrix A H A ) A H is the left inverse of A and
Direct Methods for Solving Linear Systems. Matrix Factorization
 Direct Methods for Solving Linear Systems Matrix Factorization Numerical Analysis (9th Edition) R L Burden & J D Faires Beamer Presentation Slides prepared by John Carroll Dublin City University c 2011
Direct Methods for Solving Linear Systems Matrix Factorization Numerical Analysis (9th Edition) R L Burden & J D Faires Beamer Presentation Slides prepared by John Carroll Dublin City University c 2011
1.Chapter Objectives
 LU Factorization INDEX 1.Chapter objectives 2.Overview of LU factorization 2.1GAUSS ELIMINATION AS LU FACTORIZATION 2.2LU Factorization with Pivoting 2.3 MATLAB Function: lu 3. CHOLESKY FACTORIZATION 3.1
LU Factorization INDEX 1.Chapter objectives 2.Overview of LU factorization 2.1GAUSS ELIMINATION AS LU FACTORIZATION 2.2LU Factorization with Pivoting 2.3 MATLAB Function: lu 3. CHOLESKY FACTORIZATION 3.1
Linear Algebraic Equations
 Linear Algebraic Equations 1 Fundamentals Consider the set of linear algebraic equations n a ij x i b i represented by Ax b j with [A b ] [A b] and (1a) r(a) rank of A (1b) Then Axb has a solution iff
Linear Algebraic Equations 1 Fundamentals Consider the set of linear algebraic equations n a ij x i b i represented by Ax b j with [A b ] [A b] and (1a) r(a) rank of A (1b) Then Axb has a solution iff
Solving Linear Systems of Equations
 Solving Linear Systems of Equations Gerald Recktenwald Portland State University Mechanical Engineering Department gerry@me.pdx.edu These slides are a supplement to the book Numerical Methods with Matlab:
Solving Linear Systems of Equations Gerald Recktenwald Portland State University Mechanical Engineering Department gerry@me.pdx.edu These slides are a supplement to the book Numerical Methods with Matlab:
Linear Algebra and Matrix Inversion
 Jim Lambers MAT 46/56 Spring Semester 29- Lecture 2 Notes These notes correspond to Section 63 in the text Linear Algebra and Matrix Inversion Vector Spaces and Linear Transformations Matrices are much
Jim Lambers MAT 46/56 Spring Semester 29- Lecture 2 Notes These notes correspond to Section 63 in the text Linear Algebra and Matrix Inversion Vector Spaces and Linear Transformations Matrices are much
Scientific Computing: Dense Linear Systems
 Scientific Computing: Dense Linear Systems Aleksandar Donev Courant Institute, NYU 1 donev@courant.nyu.edu 1 Course MATH-GA.2043 or CSCI-GA.2112, Spring 2012 February 9th, 2012 A. Donev (Courant Institute)
Scientific Computing: Dense Linear Systems Aleksandar Donev Courant Institute, NYU 1 donev@courant.nyu.edu 1 Course MATH-GA.2043 or CSCI-GA.2112, Spring 2012 February 9th, 2012 A. Donev (Courant Institute)
9. Numerical linear algebra background
 Convex Optimization Boyd & Vandenberghe 9. Numerical linear algebra background matrix structure and algorithm complexity solving linear equations with factored matrices LU, Cholesky, LDL T factorization
Convex Optimization Boyd & Vandenberghe 9. Numerical linear algebra background matrix structure and algorithm complexity solving linear equations with factored matrices LU, Cholesky, LDL T factorization
Solving PDEs with CUDA Jonathan Cohen
 Solving PDEs with CUDA Jonathan Cohen jocohen@nvidia.com NVIDIA Research PDEs (Partial Differential Equations) Big topic Some common strategies Focus on one type of PDE in this talk Poisson Equation Linear
Solving PDEs with CUDA Jonathan Cohen jocohen@nvidia.com NVIDIA Research PDEs (Partial Differential Equations) Big topic Some common strategies Focus on one type of PDE in this talk Poisson Equation Linear
Computational Linear Algebra
 Computational Linear Algebra PD Dr. rer. nat. habil. Ralf Peter Mundani Computation in Engineering / BGU Scientific Computing in Computer Science / INF Winter Term 2017/18 Part 2: Direct Methods PD Dr.
Computational Linear Algebra PD Dr. rer. nat. habil. Ralf Peter Mundani Computation in Engineering / BGU Scientific Computing in Computer Science / INF Winter Term 2017/18 Part 2: Direct Methods PD Dr.
Lecture Note 2: The Gaussian Elimination and LU Decomposition
 MATH 5330: Computational Methods of Linear Algebra Lecture Note 2: The Gaussian Elimination and LU Decomposition The Gaussian elimination Xianyi Zeng Department of Mathematical Sciences, UTEP The method
MATH 5330: Computational Methods of Linear Algebra Lecture Note 2: The Gaussian Elimination and LU Decomposition The Gaussian elimination Xianyi Zeng Department of Mathematical Sciences, UTEP The method
A Review of Matrix Analysis
 Matrix Notation Part Matrix Operations Matrices are simply rectangular arrays of quantities Each quantity in the array is called an element of the matrix and an element can be either a numerical value
Matrix Notation Part Matrix Operations Matrices are simply rectangular arrays of quantities Each quantity in the array is called an element of the matrix and an element can be either a numerical value
Review Questions REVIEW QUESTIONS 71
 REVIEW QUESTIONS 71 MATLAB, is [42]. For a comprehensive treatment of error analysis and perturbation theory for linear systems and many other problems in linear algebra, see [126, 241]. An overview of
REVIEW QUESTIONS 71 MATLAB, is [42]. For a comprehensive treatment of error analysis and perturbation theory for linear systems and many other problems in linear algebra, see [126, 241]. An overview of
Direct solution methods for sparse matrices. p. 1/49
 Direct solution methods for sparse matrices p. 1/49 p. 2/49 Direct solution methods for sparse matrices Solve Ax = b, where A(n n). (1) Factorize A = LU, L lower-triangular, U upper-triangular. (2) Solve
Direct solution methods for sparse matrices p. 1/49 p. 2/49 Direct solution methods for sparse matrices Solve Ax = b, where A(n n). (1) Factorize A = LU, L lower-triangular, U upper-triangular. (2) Solve
Numerical Methods I Non-Square and Sparse Linear Systems
 Numerical Methods I Non-Square and Sparse Linear Systems Aleksandar Donev Courant Institute, NYU 1 donev@courant.nyu.edu 1 MATH-GA 2011.003 / CSCI-GA 2945.003, Fall 2014 September 25th, 2014 A. Donev (Courant
Numerical Methods I Non-Square and Sparse Linear Systems Aleksandar Donev Courant Institute, NYU 1 donev@courant.nyu.edu 1 MATH-GA 2011.003 / CSCI-GA 2945.003, Fall 2014 September 25th, 2014 A. Donev (Courant
LINEAR SYSTEMS (11) Intensive Computation
 Intensive Computation") LINEAR SYSTEMS () Intensive Computation 27-8 prof. Annalisa Massini Viviana Arrigoni EXACT METHODS:. GAUSSIAN ELIMINATION. 2. CHOLESKY DECOMPOSITION. ITERATIVE METHODS:. JACOBI. 2. GAUSS-SEIDEL 2 CHOLESKY
LINEAR SYSTEMS () Intensive Computation 27-8 prof. Annalisa Massini Viviana Arrigoni EXACT METHODS:. GAUSSIAN ELIMINATION. 2. CHOLESKY DECOMPOSITION. ITERATIVE METHODS:. JACOBI. 2. GAUSS-SEIDEL 2 CHOLESKY
Lecture 9: Elementary Matrices
 Lecture 9: Elementary Matrices Review of Row Reduced Echelon Form Consider the matrix A and the vector b defined as follows: 1 2 1 A b 3 8 5 A common technique to solve linear equations of the form Ax
Lecture 9: Elementary Matrices Review of Row Reduced Echelon Form Consider the matrix A and the vector b defined as follows: 1 2 1 A b 3 8 5 A common technique to solve linear equations of the form Ax
CSE 160 Lecture 13. Numerical Linear Algebra
 CSE 16 Lecture 13 Numerical Linear Algebra Announcements Section will be held on Friday as announced on Moodle Midterm Return 213 Scott B Baden / CSE 16 / Fall 213 2 Today s lecture Gaussian Elimination
CSE 16 Lecture 13 Numerical Linear Algebra Announcements Section will be held on Friday as announced on Moodle Midterm Return 213 Scott B Baden / CSE 16 / Fall 213 2 Today s lecture Gaussian Elimination
STAT 309: MATHEMATICAL COMPUTATIONS I FALL 2018 LECTURE 13
 STAT 309: MATHEMATICAL COMPUTATIONS I FALL 208 LECTURE 3 need for pivoting we saw that under proper circumstances, we can write A LU where 0 0 0 u u 2 u n l 2 0 0 0 u 22 u 2n L l 3 l 32, U 0 0 0 l n l
STAT 309: MATHEMATICAL COMPUTATIONS I FALL 208 LECTURE 3 need for pivoting we saw that under proper circumstances, we can write A LU where 0 0 0 u u 2 u n l 2 0 0 0 u 22 u 2n L l 3 l 32, U 0 0 0 l n l
Scientific Computing WS 2018/2019. Lecture 9. Jürgen Fuhrmann Lecture 9 Slide 1
 Scientific Computing WS 2018/2019 Lecture 9 Jürgen Fuhrmann juergen.fuhrmann@wias-berlin.de Lecture 9 Slide 1 Lecture 9 Slide 2 Simple iteration with preconditioning Idea: Aû = b iterative scheme û = û
Scientific Computing WS 2018/2019 Lecture 9 Jürgen Fuhrmann juergen.fuhrmann@wias-berlin.de Lecture 9 Slide 1 Lecture 9 Slide 2 Simple iteration with preconditioning Idea: Aû = b iterative scheme û = û
Lecture 9: Numerical Linear Algebra Primer (February 11st)
") 10-725/36-725: Convex Optimization Spring 2015 Lecture 9: Numerical Linear Algebra Primer (February 11st) Lecturer: Ryan Tibshirani Scribes: Avinash Siravuru, Guofan Wu, Maosheng Liu Note: LaTeX template
10-725/36-725: Convex Optimization Spring 2015 Lecture 9: Numerical Linear Algebra Primer (February 11st) Lecturer: Ryan Tibshirani Scribes: Avinash Siravuru, Guofan Wu, Maosheng Liu Note: LaTeX template
Lecture 2 INF-MAT : , LU, symmetric LU, Positve (semi)definite, Cholesky, Semi-Cholesky
definite, Cholesky, Semi-Cholesky") Lecture 2 INF-MAT 4350 2009: 7.1-7.6, LU, symmetric LU, Positve (semi)definite, Cholesky, Semi-Cholesky Tom Lyche and Michael Floater Centre of Mathematics for Applications, Department of Informatics,
Lecture 2 INF-MAT 4350 2009: 7.1-7.6, LU, symmetric LU, Positve (semi)definite, Cholesky, Semi-Cholesky Tom Lyche and Michael Floater Centre of Mathematics for Applications, Department of Informatics,
AM205: Assignment 2. i=1
 AM05: Assignment Question 1 [10 points] (a) [4 points] For p 1, the p-norm for a vector x R n is defined as: ( n ) 1/p x p x i p ( ) i=1 This definition is in fact meaningful for p < 1 as well, although
AM05: Assignment Question 1 [10 points] (a) [4 points] For p 1, the p-norm for a vector x R n is defined as: ( n ) 1/p x p x i p ( ) i=1 This definition is in fact meaningful for p < 1 as well, although
Solving Dense Linear Systems I
 Solving Dense Linear Systems I Solving Ax = b is an important numerical method Triangular system: [ l11 l 21 if l 11, l 22 0, ] [ ] [ ] x1 b1 = l 22 x 2 b 2 x 1 = b 1 /l 11 x 2 = (b 2 l 21 x 1 )/l 22 Chih-Jen
Solving Dense Linear Systems I Solving Ax = b is an important numerical method Triangular system: [ l11 l 21 if l 11, l 22 0, ] [ ] [ ] x1 b1 = l 22 x 2 b 2 x 1 = b 1 /l 11 x 2 = (b 2 l 21 x 1 )/l 22 Chih-Jen
Algebra C Numerical Linear Algebra Sample Exam Problems
 Algebra C Numerical Linear Algebra Sample Exam Problems Notation. Denote by V a finite-dimensional Hilbert space with inner product (, ) and corresponding norm. The abbreviation SPD is used for symmetric
Algebra C Numerical Linear Algebra Sample Exam Problems Notation. Denote by V a finite-dimensional Hilbert space with inner product (, ) and corresponding norm. The abbreviation SPD is used for symmetric
Sparse Linear Systems. Iterative Methods for Sparse Linear Systems. Motivation for Studying Sparse Linear Systems. Partial Differential Equations
 Sparse Linear Systems Iterative Methods for Sparse Linear Systems Matrix Computations and Applications, Lecture C11 Fredrik Bengzon, Robert Söderlund We consider the problem of solving the linear system
Sparse Linear Systems Iterative Methods for Sparse Linear Systems Matrix Computations and Applications, Lecture C11 Fredrik Bengzon, Robert Söderlund We consider the problem of solving the linear system
MTH 464: Computational Linear Algebra
 MTH 464: Computational Linear Algebra Lecture Outlines Exam 2 Material Prof. M. Beauregard Department of Mathematics & Statistics Stephen F. Austin State University February 6, 2018 Linear Algebra (MTH
MTH 464: Computational Linear Algebra Lecture Outlines Exam 2 Material Prof. M. Beauregard Department of Mathematics & Statistics Stephen F. Austin State University February 6, 2018 Linear Algebra (MTH
Linear Systems of n equations for n unknowns
 Linear Systems of n equations for n unknowns In many application problems we want to find n unknowns, and we have n linear equations Example: Find x,x,x such that the following three equations hold: x
Linear Systems of n equations for n unknowns In many application problems we want to find n unknowns, and we have n linear equations Example: Find x,x,x such that the following three equations hold: x
LECTURE NOTES ELEMENTARY NUMERICAL METHODS. Eusebius Doedel
 LECTURE NOTES on ELEMENTARY NUMERICAL METHODS Eusebius Doedel TABLE OF CONTENTS Vector and Matrix Norms 1 Banach Lemma 20 The Numerical Solution of Linear Systems 25 Gauss Elimination 25 Operation Count
LECTURE NOTES on ELEMENTARY NUMERICAL METHODS Eusebius Doedel TABLE OF CONTENTS Vector and Matrix Norms 1 Banach Lemma 20 The Numerical Solution of Linear Systems 25 Gauss Elimination 25 Operation Count
Numerical Methods I: Numerical linear algebra
 1/3 Numerical Methods I: Numerical linear algebra Georg Stadler Courant Institute, NYU stadler@cimsnyuedu September 1, 017 /3 We study the solution of linear systems of the form Ax = b with A R n n, x,
1/3 Numerical Methods I: Numerical linear algebra Georg Stadler Courant Institute, NYU stadler@cimsnyuedu September 1, 017 /3 We study the solution of linear systems of the form Ax = b with A R n n, x,
GAUSSIAN ELIMINATION AND LU DECOMPOSITION (SUPPLEMENT FOR MA511)
") GAUSSIAN ELIMINATION AND LU DECOMPOSITION (SUPPLEMENT FOR MA511) D. ARAPURA Gaussian elimination is the go to method for all basic linear classes including this one. We go summarize the main ideas. 1.
GAUSSIAN ELIMINATION AND LU DECOMPOSITION (SUPPLEMENT FOR MA511) D. ARAPURA Gaussian elimination is the go to method for all basic linear classes including this one. We go summarize the main ideas. 1.
Applied Mathematics 205. Unit II: Numerical Linear Algebra. Lecturer: Dr. David Knezevic
 Applied Mathematics 205 Unit II: Numerical Linear Algebra Lecturer: Dr. David Knezevic Unit II: Numerical Linear Algebra Chapter II.2: LU and Cholesky Factorizations 2 / 82 Preliminaries 3 / 82 Preliminaries
Applied Mathematics 205 Unit II: Numerical Linear Algebra Lecturer: Dr. David Knezevic Unit II: Numerical Linear Algebra Chapter II.2: LU and Cholesky Factorizations 2 / 82 Preliminaries 3 / 82 Preliminaries
MATRIX ALGEBRA AND SYSTEMS OF EQUATIONS. + + x 1 x 2. x n 8 (4) 3 4 2
 3 4 2") MATRIX ALGEBRA AND SYSTEMS OF EQUATIONS SYSTEMS OF EQUATIONS AND MATRICES Representation of a linear system The general system of m equations in n unknowns can be written a x + a 2 x 2 + + a n x n b a
MATRIX ALGEBRA AND SYSTEMS OF EQUATIONS SYSTEMS OF EQUATIONS AND MATRICES Representation of a linear system The general system of m equations in n unknowns can be written a x + a 2 x 2 + + a n x n b a
Introduction to PDEs and Numerical Methods Lecture 7. Solving linear systems
 Platzhalter für Bild, Bild auf Titelfolie hinter das Logo einsetzen Introduction to PDEs and Numerical Methods Lecture 7. Solving linear systems Dr. Noemi Friedman, 09.2.205. Reminder: Instationary heat
Platzhalter für Bild, Bild auf Titelfolie hinter das Logo einsetzen Introduction to PDEs and Numerical Methods Lecture 7. Solving linear systems Dr. Noemi Friedman, 09.2.205. Reminder: Instationary heat
Numerical Linear Algebra
 Numerical Linear Algebra Direct Methods Philippe B. Laval KSU Fall 2017 Philippe B. Laval (KSU) Linear Systems: Direct Solution Methods Fall 2017 1 / 14 Introduction The solution of linear systems is one
Numerical Linear Algebra Direct Methods Philippe B. Laval KSU Fall 2017 Philippe B. Laval (KSU) Linear Systems: Direct Solution Methods Fall 2017 1 / 14 Introduction The solution of linear systems is one
1 GSW Sets of Systems
 1 Often, we have to solve a whole series of sets of simultaneous equations of the form y Ax, all of which have the same matrix A, but each of which has a different known vector y, and a different unknown
1 Often, we have to solve a whole series of sets of simultaneous equations of the form y Ax, all of which have the same matrix A, but each of which has a different known vector y, and a different unknown
Lecture 7. Gaussian Elimination with Pivoting. David Semeraro. University of Illinois at Urbana-Champaign. February 11, 2014
 Lecture 7 Gaussian Elimination with Pivoting David Semeraro University of Illinois at Urbana-Champaign February 11, 2014 David Semeraro (NCSA) CS 357 February 11, 2014 1 / 41 Naive Gaussian Elimination
Lecture 7 Gaussian Elimination with Pivoting David Semeraro University of Illinois at Urbana-Champaign February 11, 2014 David Semeraro (NCSA) CS 357 February 11, 2014 1 / 41 Naive Gaussian Elimination
Iterative Methods for Linear Systems
 Iterative Methods for Linear Systems 1. Introduction: Direct solvers versus iterative solvers In many applications we have to solve a linear system Ax = b with A R n n and b R n given. If n is large the
Iterative Methods for Linear Systems 1. Introduction: Direct solvers versus iterative solvers In many applications we have to solve a linear system Ax = b with A R n n and b R n given. If n is large the
2.1 Gaussian Elimination
 2. Gaussian Elimination A common problem encountered in numerical models is the one in which there are n equations and n unknowns. The following is a description of the Gaussian elimination method for
2. Gaussian Elimination A common problem encountered in numerical models is the one in which there are n equations and n unknowns. The following is a description of the Gaussian elimination method for
Scientific Computing: An Introductory Survey
 Scientific Computing: An Introductory Survey Chapter 2 Systems of Linear Equations Prof. Michael T. Heath Department of Computer Science University of Illinois at Urbana-Champaign Copyright c 2002. Reproduction
Scientific Computing: An Introductory Survey Chapter 2 Systems of Linear Equations Prof. Michael T. Heath Department of Computer Science University of Illinois at Urbana-Champaign Copyright c 2002. Reproduction
Chapter 7 Iterative Techniques in Matrix Algebra
 Chapter 7 Iterative Techniques in Matrix Algebra Per-Olof Persson persson@berkeley.edu Department of Mathematics University of California, Berkeley Math 128B Numerical Analysis Vector Norms Definition
Chapter 7 Iterative Techniques in Matrix Algebra Per-Olof Persson persson@berkeley.edu Department of Mathematics University of California, Berkeley Math 128B Numerical Analysis Vector Norms Definition
Dense LU factorization and its error analysis
 Dense LU factorization and its error analysis Laura Grigori INRIA and LJLL, UPMC February 2016 Plan Basis of floating point arithmetic and stability analysis Notation, results, proofs taken from [N.J.Higham,
Dense LU factorization and its error analysis Laura Grigori INRIA and LJLL, UPMC February 2016 Plan Basis of floating point arithmetic and stability analysis Notation, results, proofs taken from [N.J.Higham,
MAA507, Power method, QR-method and sparse matrix representation.
 ,, and representation. February 11, 2014 Lecture 7: Overview, Today we will look at:.. If time: A look at representation and fill in. Why do we need numerical s? I think everyone have seen how time consuming
,, and representation. February 11, 2014 Lecture 7: Overview, Today we will look at:.. If time: A look at representation and fill in. Why do we need numerical s? I think everyone have seen how time consuming
Lecture 9 Approximations of Laplace s Equation, Finite Element Method. Mathématiques appliquées (MATH0504-1) B. Dewals, C.
 B. Dewals, C.") Lecture 9 Approximations of Laplace s Equation, Finite Element Method Mathématiques appliquées (MATH54-1) B. Dewals, C. Geuzaine V1.2 23/11/218 1 Learning objectives of this lecture Apply the finite difference
Lecture 9 Approximations of Laplace s Equation, Finite Element Method Mathématiques appliquées (MATH54-1) B. Dewals, C. Geuzaine V1.2 23/11/218 1 Learning objectives of this lecture Apply the finite difference
Boundary Value Problems - Solving 3-D Finite-Difference problems Jacob White
 Introduction to Simulation - Lecture 2 Boundary Value Problems - Solving 3-D Finite-Difference problems Jacob White Thanks to Deepak Ramaswamy, Michal Rewienski, and Karen Veroy Outline Reminder about
Introduction to Simulation - Lecture 2 Boundary Value Problems - Solving 3-D Finite-Difference problems Jacob White Thanks to Deepak Ramaswamy, Michal Rewienski, and Karen Veroy Outline Reminder about
Linear Algebra. Solving Linear Systems. Copyright 2005, W.R. Winfrey
 Copyright 2005, W.R. Winfrey Topics Preliminaries Echelon Form of a Matrix Elementary Matrices; Finding A -1 Equivalent Matrices LU-Factorization Topics Preliminaries Echelon Form of a Matrix Elementary
Copyright 2005, W.R. Winfrey Topics Preliminaries Echelon Form of a Matrix Elementary Matrices; Finding A -1 Equivalent Matrices LU-Factorization Topics Preliminaries Echelon Form of a Matrix Elementary
Solving Linear Systems Using Gaussian Elimination. How can we solve
 Solving Linear Systems Using Gaussian Elimination How can we solve? 1 Gaussian elimination Consider the general augmented system: Gaussian elimination Step 1: Eliminate first column below the main diagonal.
Solving Linear Systems Using Gaussian Elimination How can we solve? 1 Gaussian elimination Consider the general augmented system: Gaussian elimination Step 1: Eliminate first column below the main diagonal.
Finite Difference Methods for Boundary Value Problems
 Finite Difference Methods for Boundary Value Problems October 2, 2013 () Finite Differences October 2, 2013 1 / 52 Goals Learn steps to approximate BVPs using the Finite Difference Method Start with two-point
Finite Difference Methods for Boundary Value Problems October 2, 2013 () Finite Differences October 2, 2013 1 / 52 Goals Learn steps to approximate BVPs using the Finite Difference Method Start with two-point
This can be accomplished by left matrix multiplication as follows: I
 1 Numerical Linear Algebra 11 The LU Factorization Recall from linear algebra that Gaussian elimination is a method for solving linear systems of the form Ax = b, where A R m n and bran(a) In this method
1 Numerical Linear Algebra 11 The LU Factorization Recall from linear algebra that Gaussian elimination is a method for solving linear systems of the form Ax = b, where A R m n and bran(a) In this method
Kasetsart University Workshop. Multigrid methods: An introduction
 Kasetsart University Workshop Multigrid methods: An introduction Dr. Anand Pardhanani Mathematics Department Earlham College Richmond, Indiana USA pardhan@earlham.edu A copy of these slides is available
Kasetsart University Workshop Multigrid methods: An introduction Dr. Anand Pardhanani Mathematics Department Earlham College Richmond, Indiana USA pardhan@earlham.edu A copy of these slides is available
AMS 147 Computational Methods and Applications Lecture 17 Copyright by Hongyun Wang, UCSC
 Lecture 17 Copyright by Hongyun Wang, UCSC Recap: Solving linear system A x = b Suppose we are given the decomposition, A = L U. We solve (LU) x = b in 2 steps: *) Solve L y = b using the forward substitution
Lecture 17 Copyright by Hongyun Wang, UCSC Recap: Solving linear system A x = b Suppose we are given the decomposition, A = L U. We solve (LU) x = b in 2 steps: *) Solve L y = b using the forward substitution
The Behavior of Algorithms in Practice 2/21/2002. Lecture 4. ɛ 1 x 1 y ɛ 1 x 1 1 = x y 1 1 = y 1 = 1 y 2 = 1 1 = 0 1 1
 8.409 The Behavior of Algorithms in Practice //00 Lecture 4 Lecturer: Dan Spielman Scribe: Matthew Lepinski A Gaussian Elimination Example To solve: [ ] [ ] [ ] x x First factor the matrix to get: [ ]
8.409 The Behavior of Algorithms in Practice //00 Lecture 4 Lecturer: Dan Spielman Scribe: Matthew Lepinski A Gaussian Elimination Example To solve: [ ] [ ] [ ] x x First factor the matrix to get: [ ]
G1110 & 852G1 Numerical Linear Algebra
 The University of Sussex Department of Mathematics G & 85G Numerical Linear Algebra Lecture Notes Autumn Term Kerstin Hesse (w aw S w a w w (w aw H(wa = (w aw + w Figure : Geometric explanation of the
The University of Sussex Department of Mathematics G & 85G Numerical Linear Algebra Lecture Notes Autumn Term Kerstin Hesse (w aw S w a w w (w aw H(wa = (w aw + w Figure : Geometric explanation of the
Course Notes: Week 1
 Course Notes: Week 1 Math 270C: Applied Numerical Linear Algebra 1 Lecture 1: Introduction (3/28/11) We will focus on iterative methods for solving linear systems of equations (and some discussion of eigenvalues
Course Notes: Week 1 Math 270C: Applied Numerical Linear Algebra 1 Lecture 1: Introduction (3/28/11) We will focus on iterative methods for solving linear systems of equations (and some discussion of eigenvalues
Poisson Solvers. William McLean. April 21, Return to Math3301/Math5315 Common Material.
 Poisson Solvers William McLean April 21, 2004 Return to Math3301/Math5315 Common Material 1 Introduction Many problems in applied mathematics lead to a partial differential equation of the form a 2 u +
Poisson Solvers William McLean April 21, 2004 Return to Math3301/Math5315 Common Material 1 Introduction Many problems in applied mathematics lead to a partial differential equation of the form a 2 u +
Lecture Notes to Accompany. Scientific Computing An Introductory Survey. by Michael T. Heath. Chapter 2. Systems of Linear Equations
 Lecture Notes to Accompany Scientific Computing An Introductory Survey Second Edition by Michael T. Heath Chapter 2 Systems of Linear Equations Copyright c 2001. Reproduction permitted only for noncommercial,
Lecture Notes to Accompany Scientific Computing An Introductory Survey Second Edition by Michael T. Heath Chapter 2 Systems of Linear Equations Copyright c 2001. Reproduction permitted only for noncommercial,
Linear Equations and Matrix
 1/60 Chia-Ping Chen Professor Department of Computer Science and Engineering National Sun Yat-sen University Linear Algebra Gaussian Elimination 2/60 Alpha Go Linear algebra begins with a system of linear
1/60 Chia-Ping Chen Professor Department of Computer Science and Engineering National Sun Yat-sen University Linear Algebra Gaussian Elimination 2/60 Alpha Go Linear algebra begins with a system of linear
MTH 215: Introduction to Linear Algebra
 MTH 215: Introduction to Linear Algebra Lecture 5 Jonathan A. Chávez Casillas 1 1 University of Rhode Island Department of Mathematics September 20, 2017 1 LU Factorization 2 3 4 Triangular Matrices Definition
MTH 215: Introduction to Linear Algebra Lecture 5 Jonathan A. Chávez Casillas 1 1 University of Rhode Island Department of Mathematics September 20, 2017 1 LU Factorization 2 3 4 Triangular Matrices Definition
Example: 2x y + 3z = 1 5y 6z = 0 x + 4z = 7. Definition: Elementary Row Operations. Example: Type I swap rows 1 and 3
 Linear Algebra Row Reduced Echelon Form Techniques for solving systems of linear equations lie at the heart of linear algebra. In high school we learn to solve systems with or variables using elimination
Linear Algebra Row Reduced Echelon Form Techniques for solving systems of linear equations lie at the heart of linear algebra. In high school we learn to solve systems with or variables using elimination
Numerical Linear Algebra
 Chapter 3 Numerical Linear Algebra We review some techniques used to solve Ax = b where A is an n n matrix, and x and b are n 1 vectors (column vectors). We then review eigenvalues and eigenvectors and
Chapter 3 Numerical Linear Algebra We review some techniques used to solve Ax = b where A is an n n matrix, and x and b are n 1 vectors (column vectors). We then review eigenvalues and eigenvectors and
Lecture 3: QR-Factorization
 Lecture 3: QR-Factorization This lecture introduces the Gram Schmidt orthonormalization process and the associated QR-factorization of matrices It also outlines some applications of this factorization
Lecture 3: QR-Factorization This lecture introduces the Gram Schmidt orthonormalization process and the associated QR-factorization of matrices It also outlines some applications of this factorization
EE364a Review Session 7
 EE364a Review Session 7 EE364a Review session outline: derivatives and chain rule (Appendix A.4) numerical linear algebra (Appendix C) factor and solve method exploiting structure and sparsity 1 Derivative
EE364a Review Session 7 EE364a Review session outline: derivatives and chain rule (Appendix A.4) numerical linear algebra (Appendix C) factor and solve method exploiting structure and sparsity 1 Derivative
MODULE 7. where A is an m n real (or complex) matrix. 2) Let K(t, s) be a function of two variables which is continuous on the square [0, 1] [0, 1].
![MODULE 7. where A is an m n real (or complex) matrix. 2) Let K(t, s) be a function of two variables which is continuous on the square [0, 1] [0, 1].](/thumbs/95/122529712.jpg "MODULE 7. where A is an m n real (or complex) matrix. 2) Let K(t, s) be a function of two variables which is continuous on the square [0, 1] [0, 1].") Topics: Linear operators MODULE 7 We are going to discuss functions = mappings = transformations = operators from one vector space V 1 into another vector space V 2. However, we shall restrict our sights
Topics: Linear operators MODULE 7 We are going to discuss functions = mappings = transformations = operators from one vector space V 1 into another vector space V 2. However, we shall restrict our sights
CLASSICAL ITERATIVE METHODS
 CLASSICAL ITERATIVE METHODS LONG CHEN In this notes we discuss classic iterative methods on solving the linear operator equation (1) Au = f, posed on a finite dimensional Hilbert space V = R N equipped
CLASSICAL ITERATIVE METHODS LONG CHEN In this notes we discuss classic iterative methods on solving the linear operator equation (1) Au = f, posed on a finite dimensional Hilbert space V = R N equipped
Chapter 4 No. 4.0 Answer True or False to the following. Give reasons for your answers.
 MATH 434/534 Theoretical Assignment 3 Solution Chapter 4 No 40 Answer True or False to the following Give reasons for your answers If a backward stable algorithm is applied to a computational problem,
MATH 434/534 Theoretical Assignment 3 Solution Chapter 4 No 40 Answer True or False to the following Give reasons for your answers If a backward stable algorithm is applied to a computational problem,
Solving Linear Systems of Equations
 1 Solving Linear Systems of Equations Many practical problems could be reduced to solving a linear system of equations formulated as Ax = b This chapter studies the computational issues about directly
1 Solving Linear Systems of Equations Many practical problems could be reduced to solving a linear system of equations formulated as Ax = b This chapter studies the computational issues about directly