LINEAR SYSTEMS (11) Intensive Computation
|
|
|
- Pauline O’Connor’
- 5 years ago
- Views:
Transcription


1 LINEAR SYSTEMS () Intensive Computation 27-8 prof. Annalisa Massini Viviana Arrigoni
2 EXACT METHODS:. GAUSSIAN ELIMINATION. 2. CHOLESKY DECOMPOSITION. ITERATIVE METHODS:. JACOBI. 2. GAUSS-SEIDEL 2
3 CHOLESKY DECOMPOSITION Direct method to solve linear systems, Ax=b. If A is symmetric and positive-definite, it can be written as the product of a lower triangular matrix L and its transpose, A=LL T. L is the Cholesky factor of A. More notions on positive-definite matrices: A matrix is positive-definite iff its eigenvalues are positive iff its principal minors are positive (Silvester s criterion). Eigenvalues: solutions of the characteristic polynomial (spectrum). Principal minors: determinants of the sub matrices on the principal diagonal. 3
4 BRIEF NOTE ON THE GEOMETRIC MEANING OF POSITIVE-DEFINITE MATRICES Since we have already met positive-definite matrices, let s try to visualise them in R 2. x y a c x c b y = ax 2 +2cxy + by 2 >, 8(x, y) 6= (, ) if A is positive-definite, 8(x, y) 6= (, ) if A is positive-semidefinite? if A is indefinite 4
5 POSITIVE-DEFINITE: ELLIPTIC PARABOLOID
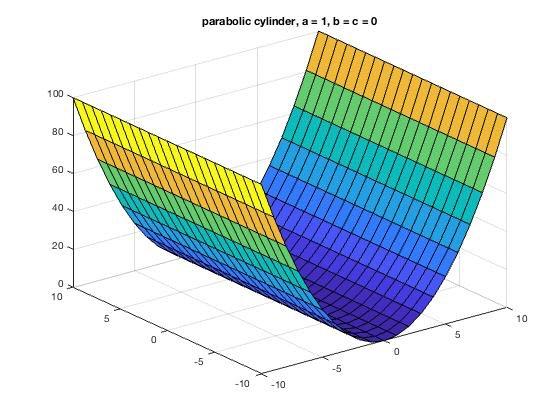
6 POSITIVE-SEMIDEFINITE: PARABOLIC CYLINDER
7 INDEFINITE: HYPERBOLIC PARABOLOID (SADDLE)
8 CHOLESKY DECOMPOSITION step: Given a symmetric square matrix A, we can write it as follows: A2 A22 A2 T a, a,2... a,n a 2, a 2,2... a 2,n a, A B C T 2, A 2, 2 R A A A 2,2 2 R n n 2, A 2,2 a n, a n,2... a n,n Now we want to write A as LL T where L is lower-triangular and can be written as follows: l,... l 2, l 2,2... C. A l n, l n,2... l n,n l, L 2,2 L 2, 8 where L22 is again lower-triangular.
9 CHOLESKY DECOMPOSITION So A=LL T is: a, A T 2, A 2, A 2,2 = l, L 2, L 2,2 l, L T 2, L T 2,2 l 2 =, l, L T 2, l, L 2, L 2, L T 2, + L 2,2 L T 2,2 Remember! We are looking for the entries of L! At this point we can compute the following portions of L: l, = p Basically we get the values a, L 2, = l, A 2, of the entries of the first column of L. Then we compute the following: A 2,2 = L 2, L T 2, + L 2,2 L T 2,2 =) L 2,2 L T 2,2 = A 2,2 L 2, L T 2, =: A (2) 9
10 CHOLESKY DECOMPOSITION 2 step: repeat step on the matrix A (2) =L2,2 L2,2 T. a (2), A (2)T 2, A (2) 2, A (2) 2,2! = A (2) (n ) (n ) 2 R (2),2,A(2) 2,,L (n 2) 3,2 2 R A (2) 2,2,L (n 2) (n 2) 3,3 2 R l2,2 l2,2 L T 3,2 L 3,2 L 3,3 L T 3,3 Iterate until the last sub matrix A (n) is considered. At every step, the size of A (k) decreases of one and the k column of L is computed. l 2,2 = l 2 = 2,2 l 2,2 L T 3,2 l 2,2 L 3,2 L 3,2 L T 3,2 + L 3,3 L T 3,3 q a (2), L 3,2 = l 2,2 A (2) 2, A (2) 2,2 = L 3,2L T 3,2 + L 3,3 L T 3,3 =) L 3,3 L T 3,3 = A (2) 2,2 L 3,2 L T 3,2 =: A (3)
11 CHOLESKY DECOMPOSITION Once we get L, the linear system Ax=b can be written as LL T x=b, so: - Solve Ly=b using forward substitution; - Solve L T x=y using backward substitution. Why does A have to be positive-definite? If A (k) is positive-definite, then: a (k) (it is its first principal minor), hence is well, > defined. is positive-definite. A (k+) = A (k) 2,2 a (k), A 2, A T 2, l k,k = q a (k), 8k =,...,n
12 A AN EXAMPLE A l, l 2, l 2,2 l, l 2, l 3, l 2,2 l 3,2 A = 5 l 3, l 3,2 l 3,3 l 3,3 l, 2 l, l 2, l, l 3, l, l 2, l2, 2 + l2,2 2 l 2, l 3, + l 2,2 l 3,2 A l, l 3, l 2, l 3, + l 2,2 l 3,2 l3, 2 + l3,2 2 + l3,3 2 Thus 5 3 L 2,2 L T 2,2 = A l, = p 25 = 5 L 2, = l2, l 3, = is the first column of L. The matrix for the next iteration is: = = = A (2)
13 AN EXAMPLE step 2 Repeat the same procedure on matrix A (2) : Thus: l 2,2 = p 9=3 So the second column of L is A (3) := = =9 l2,2 l2,2 l 3,2 l 3,2 l 3,3 l 3,3 L 3,2 = l 3,2 = 3 3A =, while: l 2 2,2 l 2,2 l 3,2 l 2,2 l 3,2 l3,2 2 + l3,3 2 3
14 AN EXAMPLE step 3 A (3) =9=L 3,3 L T 3,3 = l 2 3,3 hence: l 3,3 = p 9=3 So the last column of L is In conclusion: A = LL A A 3 3 4
15 AN EXAMPLE Assume b =(,...,) T forward substitution backward substitution Ly = b L T x = b y 2 A A 3 y 3 y 2 A y x 2 A 3 x x 2 A x
16 CHOLESKY DECOMPOSITION Algorithm: Given a linear system Ax=b, A is symmetric and positive-definite and its size is n Initialize L as a nxn zero matrix; For i=:n O(n 3 ) - expensive! L(i,i)= A(i,i); If i < n L(i+:n,i) = A(i+:n,i) / L(i,i); A(i+i:n,i+:n)=A(i+:n,i+:n) - L(i+:n,i) * L(i+:n,i) T ; Solve Ly=b (forward substitution); Solve L T x=y (backward substitution); 6
17 CHOLESKY FOR SPARSE If A is sparse, so may be L. MATRICES If L is sparse, the cost of factorization is less than n 3 /3 and it depends on n, the number of nonzero elements, and the sparsity pattern.. % Fill-in example: a a T I x y = b c Factorization a T a I = a T a L 2,2 L T 2,2 B A = B A B A 7
18 CHOLESKY FOR SPARSE MATRICES This can be solved by shifting columns of A of one position to the left (and swapping entries on vectors x and b), getting no fill-in at all. a a T I Factorization x y = I a a T B A b c = = Shift I a y a T x I p I a T at a 8 C B p a = at a c b C A
19 CHOLESKY FOR SPARSE MATRICES We have seen that permuting the entries of A can prevent fill-in during factorization, so one can factorize a permutation of A instead of A itself. Permutation matrix: square matrix having exactly one on every row and column. If P is a permutation matrix, then PA permutes A s row, AP permutes A s column, P T AP permutes A s rows and columns. Permutation matrices are orthogonal: P T = P -. Instead of factorizing A, one can factorize P T AP in order to prevent fill-in P effects the sparsity pattern of A and it is not known a-priori, but there are heuristic methods to select good permutation matrices. 9
20 FACTS ON CHOLESKY DECOMPOSITION Speaking of methods to avoid pivoting, as the transpose and the exponential methods produce positive-definite matrices, the Cholesky decomposition may be applied. Gaussian elimination vs. Cholesky decomposition: The Gaussian elimination can be applied to any matrix, even to non square ones, while the Cholesky decomposition can be applied only on (square) symmetric and positive-definite matrices. They have the same asymptotic computational cost (O(n 3 )), but Cholesky is faster by a factor 2. 2
21 EXACT METHODS:. GAUSSIAN ELIMINATION. 2. CHOLESKY DECOMPOSITION. ITERATIVE METHODS:. JACOBI. 2. GAUSS-SEIDEL
22 ITERATIVE METHODS Iterative methods for solving a linear system Ax=b consist in finding a series of approximate solutions x, x 2, etc., starting from an initial approximate solution x until convergence to the exact solution. Iteration can be interrupted when the desired precision is reached. For example: precision threshold, ε = -3. Suppose the error is computed as the absolute value of the difference of the exact and the approximate solutions element- wise, xi - x k i. It follows that an approximate solution x k is accepted if xi - x k i < ε. Assume the solution of Ax=b is x=(,,) T, the approximate solution x k =(.9,,.9) T satisfies the threshold. 22
23 ITERATIVE METHODS Iterative methods are usually faster than exact methods, specially if the coefficient matrix is large and sparse. One can play with the threshold to find the desired tradeoff between speed and accuracy (increasing the precision threshold reduces the number of iterations to reach acceptable approximate solutions, but at the same time it produces less accurate solutions). On the other hand, for some problems convergence may be very slow or the solution may not converge at all. 23
24 EXACT METHODS:. GAUSSIAN ELIMINATION. 2. CHOLESKY DECOMPOSITION. ITERATIVE METHODS:. JACOBI. 2. GAUSS-SEIDEL 24
25 JACOBI METHOD Strictly diagonally dominant matrix: The absolute value of the diagonal entries is strictly greater than the sum of the absolute value of the non diagonal entries of the corresponding rows. a i,i > n P j= j6=i a i,j 8i =...n The Jacobi method always succeeds if A or A T are strictly diagonally dominant. * if the system is not strictly diagonally dominant, it may still converge. We will consider strictly diagonally dominant linear systems. 25
26 JACOBI METHOD Given the linear system: a, x + a,2 x a,n x n = b a 2, x + a 2,2 x a 2,n x n = b 2. a n, x + a n,2 x a n,n x n = b n where A is strictly diagonally-dominant, it can be rewritten as follows by isolating xi in the i equation: x = b a,2 a, a, x 2... x 2 = b 2 a 2, a 2,2 a 2,2 x... a,n a, x n a 2,n a 2,2 x n. x n = b n a n,n a n, a n,n x a n,2 a n,n x
27 JACOBI METHOD Let x () =(x (),...,x() n ) x () is the zero vector). be the initial approximate solution (commonly Find the approximate solution x () by substituting x () in the right hand side of the linear system: x () = b a, a,2 a, x () 2... x () 2 = b 2 a 2,2 a 2, a 2,2 x ()... a,n a, x () n a 2,n a 2,2 x () n. x () n = b n a n, a n,n a n,n x () a n,2 a n,n x () 2... Then use the approximate solution x () just computed to find x (2) by substituting x () in the right hand side of the linear system. 27
28 JACOBI METHOD Iterate. At the k step one finds the approximate solution x (k) by substituting the previous one in the right hand side of the linear system: x (k) = b a, a,2 x (k) 2 = b 2 a 2,2 a 2, (k ) a, x (k ) a 2,2 x a,n (k ) a, x n a 2,n (k ) a 2,2 x n. x (k) n = b n a n,n a n, (k ) a n,n x a n,2 (k ) a n,n x 2... If A is strictly diagonally-dominant, the produced approximate solutions are more and more accurate. 28
29 JACOBI - STOPPING CRITERIA When should one stop iterating? When the error produced is small enough. Different ways to compute the error at each step: e (k) := x (k+) -x (k) : the error is the difference between the last and the previous solutions. e (k) := x-x (k) : the error is the difference between the exact solution and the approximate solution(exact solution is usually unknown tho). e (k) := x (k+) -x (k) / x (k+) : the error is the change rate between the last and the previous solutions. where. is the l 2 norm: x 2= (x 2 + +xn 2 ). So the iterations are repeated while e (k) >= ε 29
30 AN EXAMPLE The linear system 9x + y + z = 2x + y +3z = 9 3x +4y + z = has x y z A 2 A Since A is strictly diagonally dominant, the system can be solved with Jacobi. Compute the error as e (k) := x (k+) -x (k) and let x () =(,,) be the initial approximate solution. x () = 9 ( y() z () )= 9 y () = (9 2x() 3z () )= 9 z () = ( 3x() 4y () )= So the first approximate solution is x (): (x, y, z) T =( 9, 9, )T The error is: e () =2.2. 3
31 AN EXAMPLE Substituting x () we get: x (2) = 9 ( y() z () )= 9 ( 9 )= 9 y (2) = (9 2x() 3z () )= (9 2 9 z (2) = ( 3x() 4y () )= ( and the error is: e () =.4. One more iteration: x (3) = 9 ( y(2) z (2) )= 9 ( )= 5 9 )= )=.353 y (3) = (9 2x(2) 3z (2) )= ( z (3) = ( 3x(2) 4y (2) )= ( )= 8 9 The error is: e (2) =.395 )=
32 AN EXAMPLE Assume the required precision is ε = -3. Then after iteration the error is x -4. and the approximate solution is x y () A = z 2. A
33 JACOBI METHOD Algorithm: Given Ax=b, where A is strictly diagonally dominant: Initialize the first approximate solution x and an array x and set err=inf and ε; while err >= ε for i = :n x(i) = b(i); for j = :n if j!= i x(i) = x(i) - A(i,j) * x(j); x(i) = x(i) / A(i,i); update err; x = x; 33 O(#of iterations x n 2 )
34 JACOBI METHOD If k is the number of iterations (in the while), then the number of operations executed by the Jacobi algorithm is kn 2. The Gaussian elimination requires n 3 /3 operations. So it is more convenient to use the Jacobi method instead of the Gaussian elimination if kn 2 < n 3 /3, that is when k<n/3. For this reason it is important to assess the minimum number of iterations before deciding whether to apply Jacobi. Such number is the smallest k that satisfies: k> log( ( ) ) log( ) where 34 = max i=,...,n np j= j6=i a i,j a i,i = max i=,...,n x() i x () i
35 JACOBI - MATRICIAL FORM Given Ax=b, where A is strictly diagonally dominant, one can write A as follows: a, a,2... a,n a,... a 2, a 2,2... a 2,n B A = a 2,2... C. A a n, a n,2... a n,n... a n,n 2... a 2,... 6B 4@.... C.. A a n, a n, a,2... a,n... a 2,n C7. A5... A = D [ L U ] So the linear system can be rewritten as: {D [ L U]}x = b If A is diagonally dominant, D is invertible, so: Dx [ L U]x = b $ x D [ L U]x = D b $ x = D [ L U]x + D b Matricial form of Jacobi: x (k+) = D [ L U]x (k) + D b 35 k =,, 2,...
36 EXACT METHODS:. GAUSSIAN ELIMINATION. 2. CHOLESKY DECOMPOSITION. ITERATIVE METHODS:. JACOBI. 2. GAUSS-SEIDEL
37 GAUSS-SEIDEL Iterative method, very similar to Jacobi s. It always converges if A is strictly diagonally dominant or symmetric and positive-definite. x (k) = b a,2 (k ) x 2 a, a, x (k) 2 = b 2 a 2, x (k) a 2,2 a 2,2 a 2,3 a,3 (k ) x 3... a, (k ) x 3... a 2,2 a 2,n a,n a, x a 2,2 x (k ) n (k ) n x (k) 3 = b 3 a 3, x (k) a 3,3 a 3,3. x (k) n = b n a n, x (k) a n,n a n,n a 3,2 a 3,3 x (k) 2... a n,2 a n,n x (k) a 3,n a 3,3 x a n,n a n,n (k ) n x (k) n * if the system is not strictly diagonally dominant nor positive-definite, it may still converge. We will consider strictly diagonally dominant or positive-definite linear systems.
38 AN EXAMPLE The same linear system we used before: 9x + y + z = 2x + y +3z = 9 3x +4y + z = Compute the error as e (k) := x (k+) -x (k) and let x () =(,,) be the initial approximate solution. x () = 9 y () z () = 9 y () = x() z() = = 5 9 z () = 3 x() 4 y() = = error =
39 AN EXAMPLE Second iteration: x (2) = 9 9 y() 9 z() = = y (2) = x(2) z() = = z (2) = 3 x(2) 4 y(2) = = error =
40 AN EXAMPLE If the error threshold is -3, after 5 iterations we get: ya = 2 A Computed error: * -4 In iteration 4, the approximate solution was: ya = 2 A Computed error:.34. 4
41 GAUSS-SEIDEL-MATRICIAL FORM Write A as follows: a, a,2... a,n a 2, a 2,2... a 2,n B A = a n, a n,2... a n,n a,... a 2,2... C. A... a n,n 2... a 2,... 6B 4@.... C.. A a n, a n, a,2... a,n... a 2,n C7. A5... A = D [ L U ] Then the linear system can be written as: (D + L + U)x = b Then: (D + L)x + Ux = b So the matricial form of Gauss-Seidel is: (D + L)x (k+) = b Ux (k) 8k =,, 2,... 4
42 GAUSS-SEIDEL Algorithm: Given Ax=b, where A is strictly diagonally dominant or positive-definite: Initialize x, x arrays of length n. Set err=inf and ε; while err ε for i = :n x(i) = x(i) \ A(i,i); x(i) = b(i); Update err; if i == x = x; for j = 2:n x(i) = x(i) - A(i,j) * x(j); else for j = :i - x(i)=x(i) - A(i,j) * x(j); O(#of iterations x n 2 ) for j = i + :n x(i) = x(i) - A(i,j) * x(j); 42
43 JACOBI VS. GAUSS-SEIDEL On several classes of matrices, Gauss-Seidel converges twice as fast as Jacobi (meaning that at every iteration, the number of fixed exact solution digits that Gauss-Seidel computes is twice as large as Jacobi s). As soon as the improved entries of the approximate solution are computed, they are immediately used in the same iteration step, k. On the other hand, Jacobi can be parallelized, while Gauss-Seidel is inherently non parallelizable. The same stopping criteria work for both methods. 43
Linear Algebra Section 2.6 : LU Decomposition Section 2.7 : Permutations and transposes Wednesday, February 13th Math 301 Week #4
 Linear Algebra Section. : LU Decomposition Section. : Permutations and transposes Wednesday, February 1th Math 01 Week # 1 The LU Decomposition We learned last time that we can factor a invertible matrix
Linear Algebra Section. : LU Decomposition Section. : Permutations and transposes Wednesday, February 1th Math 01 Week # 1 The LU Decomposition We learned last time that we can factor a invertible matrix
Today s class. Linear Algebraic Equations LU Decomposition. Numerical Methods, Fall 2011 Lecture 8. Prof. Jinbo Bi CSE, UConn
 Today s class Linear Algebraic Equations LU Decomposition 1 Linear Algebraic Equations Gaussian Elimination works well for solving linear systems of the form: AX = B What if you have to solve the linear
Today s class Linear Algebraic Equations LU Decomposition 1 Linear Algebraic Equations Gaussian Elimination works well for solving linear systems of the form: AX = B What if you have to solve the linear
Computational Methods. Systems of Linear Equations
 Computational Methods Systems of Linear Equations Manfred Huber 2010 1 Systems of Equations Often a system model contains multiple variables (parameters) and contains multiple equations Multiple equations
Computational Methods Systems of Linear Equations Manfred Huber 2010 1 Systems of Equations Often a system model contains multiple variables (parameters) and contains multiple equations Multiple equations
Numerical Linear Algebra
 Numerical Linear Algebra Direct Methods Philippe B. Laval KSU Fall 2017 Philippe B. Laval (KSU) Linear Systems: Direct Solution Methods Fall 2017 1 / 14 Introduction The solution of linear systems is one
Numerical Linear Algebra Direct Methods Philippe B. Laval KSU Fall 2017 Philippe B. Laval (KSU) Linear Systems: Direct Solution Methods Fall 2017 1 / 14 Introduction The solution of linear systems is one
The Solution of Linear Systems AX = B
 Chapter 2 The Solution of Linear Systems AX = B 21 Upper-triangular Linear Systems We will now develop the back-substitution algorithm, which is useful for solving a linear system of equations that has
Chapter 2 The Solution of Linear Systems AX = B 21 Upper-triangular Linear Systems We will now develop the back-substitution algorithm, which is useful for solving a linear system of equations that has
10.2 ITERATIVE METHODS FOR SOLVING LINEAR SYSTEMS. The Jacobi Method
 54 CHAPTER 10 NUMERICAL METHODS 10. ITERATIVE METHODS FOR SOLVING LINEAR SYSTEMS As a numerical technique, Gaussian elimination is rather unusual because it is direct. That is, a solution is obtained after
54 CHAPTER 10 NUMERICAL METHODS 10. ITERATIVE METHODS FOR SOLVING LINEAR SYSTEMS As a numerical technique, Gaussian elimination is rather unusual because it is direct. That is, a solution is obtained after
Linear Algebraic Equations
 Linear Algebraic Equations 1 Fundamentals Consider the set of linear algebraic equations n a ij x i b i represented by Ax b j with [A b ] [A b] and (1a) r(a) rank of A (1b) Then Axb has a solution iff
Linear Algebraic Equations 1 Fundamentals Consider the set of linear algebraic equations n a ij x i b i represented by Ax b j with [A b ] [A b] and (1a) r(a) rank of A (1b) Then Axb has a solution iff
CS412: Lecture #17. Mridul Aanjaneya. March 19, 2015
 CS: Lecture #7 Mridul Aanjaneya March 9, 5 Solving linear systems of equations Consider a lower triangular matrix L: l l l L = l 3 l 3 l 33 l n l nn A procedure similar to that for upper triangular systems
CS: Lecture #7 Mridul Aanjaneya March 9, 5 Solving linear systems of equations Consider a lower triangular matrix L: l l l L = l 3 l 3 l 33 l n l nn A procedure similar to that for upper triangular systems
Process Model Formulation and Solution, 3E4
 Process Model Formulation and Solution, 3E4 Section B: Linear Algebraic Equations Instructor: Kevin Dunn dunnkg@mcmasterca Department of Chemical Engineering Course notes: Dr Benoît Chachuat 06 October
Process Model Formulation and Solution, 3E4 Section B: Linear Algebraic Equations Instructor: Kevin Dunn dunnkg@mcmasterca Department of Chemical Engineering Course notes: Dr Benoît Chachuat 06 October
DEN: Linear algebra numerical view (GEM: Gauss elimination method for reducing a full rank matrix to upper-triangular
 form) Given: matrix C = (c i,j ) n,m i,j=1 ODE and num math: Linear algebra (N) [lectures] c phabala 2016 DEN: Linear algebra numerical view (GEM: Gauss elimination method for reducing a full rank matrix
form) Given: matrix C = (c i,j ) n,m i,j=1 ODE and num math: Linear algebra (N) [lectures] c phabala 2016 DEN: Linear algebra numerical view (GEM: Gauss elimination method for reducing a full rank matrix
Review of matrices. Let m, n IN. A rectangle of numbers written like A =
 Review of matrices Let m, n IN. A rectangle of numbers written like a 11 a 12... a 1n a 21 a 22... a 2n A =...... a m1 a m2... a mn where each a ij IR is called a matrix with m rows and n columns or an
Review of matrices Let m, n IN. A rectangle of numbers written like a 11 a 12... a 1n a 21 a 22... a 2n A =...... a m1 a m2... a mn where each a ij IR is called a matrix with m rows and n columns or an
2.1 Gaussian Elimination
 2. Gaussian Elimination A common problem encountered in numerical models is the one in which there are n equations and n unknowns. The following is a description of the Gaussian elimination method for
2. Gaussian Elimination A common problem encountered in numerical models is the one in which there are n equations and n unknowns. The following is a description of the Gaussian elimination method for
Next topics: Solving systems of linear equations
 Next topics: Solving systems of linear equations 1 Gaussian elimination (today) 2 Gaussian elimination with partial pivoting (Week 9) 3 The method of LU-decomposition (Week 10) 4 Iterative techniques:
Next topics: Solving systems of linear equations 1 Gaussian elimination (today) 2 Gaussian elimination with partial pivoting (Week 9) 3 The method of LU-decomposition (Week 10) 4 Iterative techniques:
Direct Methods for Solving Linear Systems. Matrix Factorization
 Direct Methods for Solving Linear Systems Matrix Factorization Numerical Analysis (9th Edition) R L Burden & J D Faires Beamer Presentation Slides prepared by John Carroll Dublin City University c 2011
Direct Methods for Solving Linear Systems Matrix Factorization Numerical Analysis (9th Edition) R L Burden & J D Faires Beamer Presentation Slides prepared by John Carroll Dublin City University c 2011
Solving Linear Systems of Equations
 November 6, 2013 Introduction The type of problems that we have to solve are: Solve the system: A x = B, where a 11 a 1N a 12 a 2N A =.. a 1N a NN x = x 1 x 2. x N B = b 1 b 2. b N To find A 1 (inverse
November 6, 2013 Introduction The type of problems that we have to solve are: Solve the system: A x = B, where a 11 a 1N a 12 a 2N A =.. a 1N a NN x = x 1 x 2. x N B = b 1 b 2. b N To find A 1 (inverse
COURSE Numerical methods for solving linear systems. Practical solving of many problems eventually leads to solving linear systems.
 COURSE 9 4 Numerical methods for solving linear systems Practical solving of many problems eventually leads to solving linear systems Classification of the methods: - direct methods - with low number of
COURSE 9 4 Numerical methods for solving linear systems Practical solving of many problems eventually leads to solving linear systems Classification of the methods: - direct methods - with low number of
CS 323: Numerical Analysis and Computing
 CS 323: Numerical Analysis and Computing MIDTERM #1 Instructions: This is an open notes exam, i.e., you are allowed to consult any textbook, your class notes, homeworks, or any of the handouts from us.
CS 323: Numerical Analysis and Computing MIDTERM #1 Instructions: This is an open notes exam, i.e., you are allowed to consult any textbook, your class notes, homeworks, or any of the handouts from us.
1 Multiply Eq. E i by λ 0: (λe i ) (E i ) 2 Multiply Eq. E j by λ and add to Eq. E i : (E i + λe j ) (E i )
 (E i ) 2 Multiply Eq. E j by λ and add to Eq. E i : (E i + λe j ) (E i )") Direct Methods for Linear Systems Chapter Direct Methods for Solving Linear Systems Per-Olof Persson persson@berkeleyedu Department of Mathematics University of California, Berkeley Math 18A Numerical
Direct Methods for Linear Systems Chapter Direct Methods for Solving Linear Systems Per-Olof Persson persson@berkeleyedu Department of Mathematics University of California, Berkeley Math 18A Numerical
A LINEAR SYSTEMS OF EQUATIONS. By : Dewi Rachmatin
 A LINEAR SYSTEMS OF EQUATIONS By : Dewi Rachmatin Back Substitution We will now develop the backsubstitution algorithm, which is useful for solving a linear system of equations that has an upper-triangular
A LINEAR SYSTEMS OF EQUATIONS By : Dewi Rachmatin Back Substitution We will now develop the backsubstitution algorithm, which is useful for solving a linear system of equations that has an upper-triangular
Introduction to PDEs and Numerical Methods Lecture 7. Solving linear systems
 Platzhalter für Bild, Bild auf Titelfolie hinter das Logo einsetzen Introduction to PDEs and Numerical Methods Lecture 7. Solving linear systems Dr. Noemi Friedman, 09.2.205. Reminder: Instationary heat
Platzhalter für Bild, Bild auf Titelfolie hinter das Logo einsetzen Introduction to PDEs and Numerical Methods Lecture 7. Solving linear systems Dr. Noemi Friedman, 09.2.205. Reminder: Instationary heat
Numerical Methods - Numerical Linear Algebra
 Numerical Methods - Numerical Linear Algebra Y. K. Goh Universiti Tunku Abdul Rahman 2013 Y. K. Goh (UTAR) Numerical Methods - Numerical Linear Algebra I 2013 1 / 62 Outline 1 Motivation 2 Solving Linear
Numerical Methods - Numerical Linear Algebra Y. K. Goh Universiti Tunku Abdul Rahman 2013 Y. K. Goh (UTAR) Numerical Methods - Numerical Linear Algebra I 2013 1 / 62 Outline 1 Motivation 2 Solving Linear
Math 471 (Numerical methods) Chapter 3 (second half). System of equations
 Chapter 3 (second half). System of equations") Math 47 (Numerical methods) Chapter 3 (second half). System of equations Overlap 3.5 3.8 of Bradie 3.5 LU factorization w/o pivoting. Motivation: ( ) A I Gaussian Elimination (U L ) where U is upper triangular
Math 47 (Numerical methods) Chapter 3 (second half). System of equations Overlap 3.5 3.8 of Bradie 3.5 LU factorization w/o pivoting. Motivation: ( ) A I Gaussian Elimination (U L ) where U is upper triangular
Matrices and Matrix Algebra.
 Matrices and Matrix Algebra 3.1. Operations on Matrices Matrix Notation and Terminology Matrix: a rectangular array of numbers, called entries. A matrix with m rows and n columns m n A n n matrix : a square
Matrices and Matrix Algebra 3.1. Operations on Matrices Matrix Notation and Terminology Matrix: a rectangular array of numbers, called entries. A matrix with m rows and n columns m n A n n matrix : a square
LU Factorization. Marco Chiarandini. DM559 Linear and Integer Programming. Department of Mathematics & Computer Science University of Southern Denmark
 DM559 Linear and Integer Programming LU Factorization Marco Chiarandini Department of Mathematics & Computer Science University of Southern Denmark [Based on slides by Lieven Vandenberghe, UCLA] Outline
DM559 Linear and Integer Programming LU Factorization Marco Chiarandini Department of Mathematics & Computer Science University of Southern Denmark [Based on slides by Lieven Vandenberghe, UCLA] Outline
9.1 Preconditioned Krylov Subspace Methods
 Chapter 9 PRECONDITIONING 9.1 Preconditioned Krylov Subspace Methods 9.2 Preconditioned Conjugate Gradient 9.3 Preconditioned Generalized Minimal Residual 9.4 Relaxation Method Preconditioners 9.5 Incomplete
Chapter 9 PRECONDITIONING 9.1 Preconditioned Krylov Subspace Methods 9.2 Preconditioned Conjugate Gradient 9.3 Preconditioned Generalized Minimal Residual 9.4 Relaxation Method Preconditioners 9.5 Incomplete
Direct Methods for Solving Linear Systems. Simon Fraser University Surrey Campus MACM 316 Spring 2005 Instructor: Ha Le
 Direct Methods for Solving Linear Systems Simon Fraser University Surrey Campus MACM 316 Spring 2005 Instructor: Ha Le 1 Overview General Linear Systems Gaussian Elimination Triangular Systems The LU Factorization
Direct Methods for Solving Linear Systems Simon Fraser University Surrey Campus MACM 316 Spring 2005 Instructor: Ha Le 1 Overview General Linear Systems Gaussian Elimination Triangular Systems The LU Factorization
LU Factorization. LU Decomposition. LU Decomposition. LU Decomposition: Motivation A = LU
 LU Factorization To further improve the efficiency of solving linear systems Factorizations of matrix A : LU and QR LU Factorization Methods: Using basic Gaussian Elimination (GE) Factorization of Tridiagonal
LU Factorization To further improve the efficiency of solving linear systems Factorizations of matrix A : LU and QR LU Factorization Methods: Using basic Gaussian Elimination (GE) Factorization of Tridiagonal
Algebra C Numerical Linear Algebra Sample Exam Problems
 Algebra C Numerical Linear Algebra Sample Exam Problems Notation. Denote by V a finite-dimensional Hilbert space with inner product (, ) and corresponding norm. The abbreviation SPD is used for symmetric
Algebra C Numerical Linear Algebra Sample Exam Problems Notation. Denote by V a finite-dimensional Hilbert space with inner product (, ) and corresponding norm. The abbreviation SPD is used for symmetric
JACOBI S ITERATION METHOD
 ITERATION METHODS These are methods which compute a sequence of progressively accurate iterates to approximate the solution of Ax = b. We need such methods for solving many large linear systems. Sometimes
ITERATION METHODS These are methods which compute a sequence of progressively accurate iterates to approximate the solution of Ax = b. We need such methods for solving many large linear systems. Sometimes
Iterative Methods. Splitting Methods
 Iterative Methods Splitting Methods 1 Direct Methods Solving Ax = b using direct methods. Gaussian elimination (using LU decomposition) Variants of LU, including Crout and Doolittle Other decomposition
Iterative Methods Splitting Methods 1 Direct Methods Solving Ax = b using direct methods. Gaussian elimination (using LU decomposition) Variants of LU, including Crout and Doolittle Other decomposition
CHAPTER 6. Direct Methods for Solving Linear Systems
 CHAPTER 6 Direct Methods for Solving Linear Systems. Introduction A direct method for approximating the solution of a system of n linear equations in n unknowns is one that gives the exact solution to
CHAPTER 6 Direct Methods for Solving Linear Systems. Introduction A direct method for approximating the solution of a system of n linear equations in n unknowns is one that gives the exact solution to
PowerPoints organized by Dr. Michael R. Gustafson II, Duke University
 Part 3 Chapter 10 LU Factorization PowerPoints organized by Dr. Michael R. Gustafson II, Duke University All images copyright The McGraw-Hill Companies, Inc. Permission required for reproduction or display.
Part 3 Chapter 10 LU Factorization PowerPoints organized by Dr. Michael R. Gustafson II, Duke University All images copyright The McGraw-Hill Companies, Inc. Permission required for reproduction or display.
Numerical Linear Algebra
 Chapter 3 Numerical Linear Algebra We review some techniques used to solve Ax = b where A is an n n matrix, and x and b are n 1 vectors (column vectors). We then review eigenvalues and eigenvectors and
Chapter 3 Numerical Linear Algebra We review some techniques used to solve Ax = b where A is an n n matrix, and x and b are n 1 vectors (column vectors). We then review eigenvalues and eigenvectors and
Scientific Computing
 Scientific Computing Direct solution methods Martin van Gijzen Delft University of Technology October 3, 2018 1 Program October 3 Matrix norms LU decomposition Basic algorithm Cost Stability Pivoting Pivoting
Scientific Computing Direct solution methods Martin van Gijzen Delft University of Technology October 3, 2018 1 Program October 3 Matrix norms LU decomposition Basic algorithm Cost Stability Pivoting Pivoting
Systems of Linear Equations
 Systems of Linear Equations Last time, we found that solving equations such as Poisson s equation or Laplace s equation on a grid is equivalent to solving a system of linear equations. There are many other
Systems of Linear Equations Last time, we found that solving equations such as Poisson s equation or Laplace s equation on a grid is equivalent to solving a system of linear equations. There are many other
1 GSW Sets of Systems
 1 Often, we have to solve a whole series of sets of simultaneous equations of the form y Ax, all of which have the same matrix A, but each of which has a different known vector y, and a different unknown
1 Often, we have to solve a whole series of sets of simultaneous equations of the form y Ax, all of which have the same matrix A, but each of which has a different known vector y, and a different unknown
9. Numerical linear algebra background
 Convex Optimization Boyd & Vandenberghe 9. Numerical linear algebra background matrix structure and algorithm complexity solving linear equations with factored matrices LU, Cholesky, LDL T factorization
Convex Optimization Boyd & Vandenberghe 9. Numerical linear algebra background matrix structure and algorithm complexity solving linear equations with factored matrices LU, Cholesky, LDL T factorization
Boundary Value Problems - Solving 3-D Finite-Difference problems Jacob White
 Introduction to Simulation - Lecture 2 Boundary Value Problems - Solving 3-D Finite-Difference problems Jacob White Thanks to Deepak Ramaswamy, Michal Rewienski, and Karen Veroy Outline Reminder about
Introduction to Simulation - Lecture 2 Boundary Value Problems - Solving 3-D Finite-Difference problems Jacob White Thanks to Deepak Ramaswamy, Michal Rewienski, and Karen Veroy Outline Reminder about
9. Numerical linear algebra background
 Convex Optimization Boyd & Vandenberghe 9. Numerical linear algebra background matrix structure and algorithm complexity solving linear equations with factored matrices LU, Cholesky, LDL T factorization
Convex Optimization Boyd & Vandenberghe 9. Numerical linear algebra background matrix structure and algorithm complexity solving linear equations with factored matrices LU, Cholesky, LDL T factorization
Iterative Solvers. Lab 6. Iterative Methods
 Lab 6 Iterative Solvers Lab Objective: Many real-world problems of the form Ax = b have tens of thousands of parameters Solving such systems with Gaussian elimination or matrix factorizations could require
Lab 6 Iterative Solvers Lab Objective: Many real-world problems of the form Ax = b have tens of thousands of parameters Solving such systems with Gaussian elimination or matrix factorizations could require
Scientific Computing WS 2018/2019. Lecture 9. Jürgen Fuhrmann Lecture 9 Slide 1
 Scientific Computing WS 2018/2019 Lecture 9 Jürgen Fuhrmann juergen.fuhrmann@wias-berlin.de Lecture 9 Slide 1 Lecture 9 Slide 2 Simple iteration with preconditioning Idea: Aû = b iterative scheme û = û
Scientific Computing WS 2018/2019 Lecture 9 Jürgen Fuhrmann juergen.fuhrmann@wias-berlin.de Lecture 9 Slide 1 Lecture 9 Slide 2 Simple iteration with preconditioning Idea: Aû = b iterative scheme û = û
CS475: Linear Equations Gaussian Elimination LU Decomposition Wim Bohm Colorado State University
 CS475: Linear Equations Gaussian Elimination LU Decomposition Wim Bohm Colorado State University Except as otherwise noted, the content of this presentation is licensed under the Creative Commons Attribution
CS475: Linear Equations Gaussian Elimination LU Decomposition Wim Bohm Colorado State University Except as otherwise noted, the content of this presentation is licensed under the Creative Commons Attribution
Gaussian Elimination without/with Pivoting and Cholesky Decomposition
 Gaussian Elimination without/with Pivoting and Cholesky Decomposition Gaussian Elimination WITHOUT pivoting Notation: For a matrix A R n n we define for k {,,n} the leading principal submatrix a a k A
Gaussian Elimination without/with Pivoting and Cholesky Decomposition Gaussian Elimination WITHOUT pivoting Notation: For a matrix A R n n we define for k {,,n} the leading principal submatrix a a k A
Math/Phys/Engr 428, Math 529/Phys 528 Numerical Methods - Summer Homework 3 Due: Tuesday, July 3, 2018
 Math/Phys/Engr 428, Math 529/Phys 528 Numerical Methods - Summer 28. (Vector and Matrix Norms) Homework 3 Due: Tuesday, July 3, 28 Show that the l vector norm satisfies the three properties (a) x for x
Math/Phys/Engr 428, Math 529/Phys 528 Numerical Methods - Summer 28. (Vector and Matrix Norms) Homework 3 Due: Tuesday, July 3, 28 Show that the l vector norm satisfies the three properties (a) x for x
The purpose of computing is insight, not numbers. Richard Wesley Hamming
 Systems of Linear Equations The purpose of computing is insight, not numbers. Richard Wesley Hamming Fall 2010 1 Topics to Be Discussed This is a long unit and will include the following important topics:
Systems of Linear Equations The purpose of computing is insight, not numbers. Richard Wesley Hamming Fall 2010 1 Topics to Be Discussed This is a long unit and will include the following important topics:
LU Factorization. LU factorization is the most common way of solving linear systems! Ax = b LUx = b
 AM 205: lecture 7 Last time: LU factorization Today s lecture: Cholesky factorization, timing, QR factorization Reminder: assignment 1 due at 5 PM on Friday September 22 LU Factorization LU factorization
AM 205: lecture 7 Last time: LU factorization Today s lecture: Cholesky factorization, timing, QR factorization Reminder: assignment 1 due at 5 PM on Friday September 22 LU Factorization LU factorization
Numerical Methods I Non-Square and Sparse Linear Systems
 Numerical Methods I Non-Square and Sparse Linear Systems Aleksandar Donev Courant Institute, NYU 1 donev@courant.nyu.edu 1 MATH-GA 2011.003 / CSCI-GA 2945.003, Fall 2014 September 25th, 2014 A. Donev (Courant
Numerical Methods I Non-Square and Sparse Linear Systems Aleksandar Donev Courant Institute, NYU 1 donev@courant.nyu.edu 1 MATH-GA 2011.003 / CSCI-GA 2945.003, Fall 2014 September 25th, 2014 A. Donev (Courant
Parallel Scientific Computing
 IV-1 Parallel Scientific Computing Matrix-vector multiplication. Matrix-matrix multiplication. Direct method for solving a linear equation. Gaussian Elimination. Iterative method for solving a linear equation.
IV-1 Parallel Scientific Computing Matrix-vector multiplication. Matrix-matrix multiplication. Direct method for solving a linear equation. Gaussian Elimination. Iterative method for solving a linear equation.
MATH 3511 Lecture 1. Solving Linear Systems 1
 MATH 3511 Lecture 1 Solving Linear Systems 1 Dmitriy Leykekhman Spring 2012 Goals Review of basic linear algebra Solution of simple linear systems Gaussian elimination D Leykekhman - MATH 3511 Introduction
MATH 3511 Lecture 1 Solving Linear Systems 1 Dmitriy Leykekhman Spring 2012 Goals Review of basic linear algebra Solution of simple linear systems Gaussian elimination D Leykekhman - MATH 3511 Introduction
Lecture 18 Classical Iterative Methods
 Lecture 18 Classical Iterative Methods MIT 18.335J / 6.337J Introduction to Numerical Methods Per-Olof Persson November 14, 2006 1 Iterative Methods for Linear Systems Direct methods for solving Ax = b,
Lecture 18 Classical Iterative Methods MIT 18.335J / 6.337J Introduction to Numerical Methods Per-Olof Persson November 14, 2006 1 Iterative Methods for Linear Systems Direct methods for solving Ax = b,
Course Notes: Week 1
 Course Notes: Week 1 Math 270C: Applied Numerical Linear Algebra 1 Lecture 1: Introduction (3/28/11) We will focus on iterative methods for solving linear systems of equations (and some discussion of eigenvalues
Course Notes: Week 1 Math 270C: Applied Numerical Linear Algebra 1 Lecture 1: Introduction (3/28/11) We will focus on iterative methods for solving linear systems of equations (and some discussion of eigenvalues
9. Iterative Methods for Large Linear Systems
 EE507 - Computational Techniques for EE Jitkomut Songsiri 9. Iterative Methods for Large Linear Systems introduction splitting method Jacobi method Gauss-Seidel method successive overrelaxation (SOR) 9-1
EE507 - Computational Techniques for EE Jitkomut Songsiri 9. Iterative Methods for Large Linear Systems introduction splitting method Jacobi method Gauss-Seidel method successive overrelaxation (SOR) 9-1
Scientific Computing with Case Studies SIAM Press, Lecture Notes for Unit VII Sparse Matrix
 Scientific Computing with Case Studies SIAM Press, 2009 http://www.cs.umd.edu/users/oleary/sccswebpage Lecture Notes for Unit VII Sparse Matrix Computations Part 1: Direct Methods Dianne P. O Leary c 2008
Scientific Computing with Case Studies SIAM Press, 2009 http://www.cs.umd.edu/users/oleary/sccswebpage Lecture Notes for Unit VII Sparse Matrix Computations Part 1: Direct Methods Dianne P. O Leary c 2008
Matrix decompositions
 Matrix decompositions Zdeněk Dvořák May 19, 2015 Lemma 1 (Schur decomposition). If A is a symmetric real matrix, then there exists an orthogonal matrix Q and a diagonal matrix D such that A = QDQ T. The
Matrix decompositions Zdeněk Dvořák May 19, 2015 Lemma 1 (Schur decomposition). If A is a symmetric real matrix, then there exists an orthogonal matrix Q and a diagonal matrix D such that A = QDQ T. The
5.7 Cramer's Rule 1. Using Determinants to Solve Systems Assumes the system of two equations in two unknowns
 5.7 Cramer's Rule 1. Using Determinants to Solve Systems Assumes the system of two equations in two unknowns (1) possesses the solution and provided that.. The numerators and denominators are recognized
5.7 Cramer's Rule 1. Using Determinants to Solve Systems Assumes the system of two equations in two unknowns (1) possesses the solution and provided that.. The numerators and denominators are recognized
MATHEMATICS FOR COMPUTER VISION WEEK 2 LINEAR SYSTEMS. Dr Fabio Cuzzolin MSc in Computer Vision Oxford Brookes University Year
 1 MATHEMATICS FOR COMPUTER VISION WEEK 2 LINEAR SYSTEMS Dr Fabio Cuzzolin MSc in Computer Vision Oxford Brookes University Year 2013-14 OUTLINE OF WEEK 2 Linear Systems and solutions Systems of linear
1 MATHEMATICS FOR COMPUTER VISION WEEK 2 LINEAR SYSTEMS Dr Fabio Cuzzolin MSc in Computer Vision Oxford Brookes University Year 2013-14 OUTLINE OF WEEK 2 Linear Systems and solutions Systems of linear
Pivoting. Reading: GV96 Section 3.4, Stew98 Chapter 3: 1.3
 Pivoting Reading: GV96 Section 3.4, Stew98 Chapter 3: 1.3 In the previous discussions we have assumed that the LU factorization of A existed and the various versions could compute it in a stable manner.
Pivoting Reading: GV96 Section 3.4, Stew98 Chapter 3: 1.3 In the previous discussions we have assumed that the LU factorization of A existed and the various versions could compute it in a stable manner.
Numerical Linear Algebra Primer. Ryan Tibshirani Convex Optimization /36-725
 Numerical Linear Algebra Primer Ryan Tibshirani Convex Optimization 10-725/36-725 Last time: proximal gradient descent Consider the problem min g(x) + h(x) with g, h convex, g differentiable, and h simple
Numerical Linear Algebra Primer Ryan Tibshirani Convex Optimization 10-725/36-725 Last time: proximal gradient descent Consider the problem min g(x) + h(x) with g, h convex, g differentiable, and h simple
Introduction to Mobile Robotics Compact Course on Linear Algebra. Wolfram Burgard, Bastian Steder
 Introduction to Mobile Robotics Compact Course on Linear Algebra Wolfram Burgard, Bastian Steder Reference Book Thrun, Burgard, and Fox: Probabilistic Robotics Vectors Arrays of numbers Vectors represent
Introduction to Mobile Robotics Compact Course on Linear Algebra Wolfram Burgard, Bastian Steder Reference Book Thrun, Burgard, and Fox: Probabilistic Robotics Vectors Arrays of numbers Vectors represent
Chapter 2. Solving Systems of Equations. 2.1 Gaussian elimination
 Chapter 2 Solving Systems of Equations A large number of real life applications which are resolved through mathematical modeling will end up taking the form of the following very simple looking matrix
Chapter 2 Solving Systems of Equations A large number of real life applications which are resolved through mathematical modeling will end up taking the form of the following very simple looking matrix
Symmetric matrices and dot products
 Symmetric matrices and dot products Proposition An n n matrix A is symmetric iff, for all x, y in R n, (Ax) y = x (Ay). Proof. If A is symmetric, then (Ax) y = x T A T y = x T Ay = x (Ay). If equality
Symmetric matrices and dot products Proposition An n n matrix A is symmetric iff, for all x, y in R n, (Ax) y = x (Ay). Proof. If A is symmetric, then (Ax) y = x T A T y = x T Ay = x (Ay). If equality
Numerical Methods I Solving Square Linear Systems: GEM and LU factorization
 Numerical Methods I Solving Square Linear Systems: GEM and LU factorization Aleksandar Donev Courant Institute, NYU 1 donev@courant.nyu.edu 1 MATH-GA 2011.003 / CSCI-GA 2945.003, Fall 2014 September 18th,
Numerical Methods I Solving Square Linear Systems: GEM and LU factorization Aleksandar Donev Courant Institute, NYU 1 donev@courant.nyu.edu 1 MATH-GA 2011.003 / CSCI-GA 2945.003, Fall 2014 September 18th,
TMA4125 Matematikk 4N Spring 2017
 Norwegian University of Science and Technology Institutt for matematiske fag TMA15 Matematikk N Spring 17 Solutions to exercise set 1 1 We begin by writing the system as the augmented matrix.139.38.3 6.
Norwegian University of Science and Technology Institutt for matematiske fag TMA15 Matematikk N Spring 17 Solutions to exercise set 1 1 We begin by writing the system as the augmented matrix.139.38.3 6.
Numerical Methods I: Numerical linear algebra
 1/3 Numerical Methods I: Numerical linear algebra Georg Stadler Courant Institute, NYU stadler@cimsnyuedu September 1, 017 /3 We study the solution of linear systems of the form Ax = b with A R n n, x,
1/3 Numerical Methods I: Numerical linear algebra Georg Stadler Courant Institute, NYU stadler@cimsnyuedu September 1, 017 /3 We study the solution of linear systems of the form Ax = b with A R n n, x,
Matrices and systems of linear equations
 Matrices and systems of linear equations Samy Tindel Purdue University Differential equations and linear algebra - MA 262 Taken from Differential equations and linear algebra by Goode and Annin Samy T.
Matrices and systems of linear equations Samy Tindel Purdue University Differential equations and linear algebra - MA 262 Taken from Differential equations and linear algebra by Goode and Annin Samy T.
CSE 160 Lecture 13. Numerical Linear Algebra
 CSE 16 Lecture 13 Numerical Linear Algebra Announcements Section will be held on Friday as announced on Moodle Midterm Return 213 Scott B Baden / CSE 16 / Fall 213 2 Today s lecture Gaussian Elimination
CSE 16 Lecture 13 Numerical Linear Algebra Announcements Section will be held on Friday as announced on Moodle Midterm Return 213 Scott B Baden / CSE 16 / Fall 213 2 Today s lecture Gaussian Elimination
Solving Dense Linear Systems I
 Solving Dense Linear Systems I Solving Ax = b is an important numerical method Triangular system: [ l11 l 21 if l 11, l 22 0, ] [ ] [ ] x1 b1 = l 22 x 2 b 2 x 1 = b 1 /l 11 x 2 = (b 2 l 21 x 1 )/l 22 Chih-Jen
Solving Dense Linear Systems I Solving Ax = b is an important numerical method Triangular system: [ l11 l 21 if l 11, l 22 0, ] [ ] [ ] x1 b1 = l 22 x 2 b 2 x 1 = b 1 /l 11 x 2 = (b 2 l 21 x 1 )/l 22 Chih-Jen
G1110 & 852G1 Numerical Linear Algebra
 The University of Sussex Department of Mathematics G & 85G Numerical Linear Algebra Lecture Notes Autumn Term Kerstin Hesse (w aw S w a w w (w aw H(wa = (w aw + w Figure : Geometric explanation of the
The University of Sussex Department of Mathematics G & 85G Numerical Linear Algebra Lecture Notes Autumn Term Kerstin Hesse (w aw S w a w w (w aw H(wa = (w aw + w Figure : Geometric explanation of the
Here each term has degree 2 (the sum of exponents is 2 for all summands). A quadratic form of three variables looks as
. A quadratic form of three variables looks as") Reading [SB], Ch. 16.1-16.3, p. 375-393 1 Quadratic Forms A quadratic function f : R R has the form f(x) = a x. Generalization of this notion to two variables is the quadratic form Q(x 1, x ) = a 11 x
Reading [SB], Ch. 16.1-16.3, p. 375-393 1 Quadratic Forms A quadratic function f : R R has the form f(x) = a x. Generalization of this notion to two variables is the quadratic form Q(x 1, x ) = a 11 x
Computational Linear Algebra
 Computational Linear Algebra PD Dr. rer. nat. habil. Ralf Peter Mundani Computation in Engineering / BGU Scientific Computing in Computer Science / INF Winter Term 2017/18 Part 2: Direct Methods PD Dr.
Computational Linear Algebra PD Dr. rer. nat. habil. Ralf Peter Mundani Computation in Engineering / BGU Scientific Computing in Computer Science / INF Winter Term 2017/18 Part 2: Direct Methods PD Dr.
Jordan Journal of Mathematics and Statistics (JJMS) 5(3), 2012, pp A NEW ITERATIVE METHOD FOR SOLVING LINEAR SYSTEMS OF EQUATIONS
 5(3), 2012, pp A NEW ITERATIVE METHOD FOR SOLVING LINEAR SYSTEMS OF EQUATIONS") Jordan Journal of Mathematics and Statistics JJMS) 53), 2012, pp.169-184 A NEW ITERATIVE METHOD FOR SOLVING LINEAR SYSTEMS OF EQUATIONS ADEL H. AL-RABTAH Abstract. The Jacobi and Gauss-Seidel iterative
Jordan Journal of Mathematics and Statistics JJMS) 53), 2012, pp.169-184 A NEW ITERATIVE METHOD FOR SOLVING LINEAR SYSTEMS OF EQUATIONS ADEL H. AL-RABTAH Abstract. The Jacobi and Gauss-Seidel iterative
CHAPTER 5. Basic Iterative Methods
 Basic Iterative Methods CHAPTER 5 Solve Ax = f where A is large and sparse (and nonsingular. Let A be split as A = M N in which M is nonsingular, and solving systems of the form Mz = r is much easier than
Basic Iterative Methods CHAPTER 5 Solve Ax = f where A is large and sparse (and nonsingular. Let A be split as A = M N in which M is nonsingular, and solving systems of the form Mz = r is much easier than
Lecture 11. Linear systems: Cholesky method. Eigensystems: Terminology. Jacobi transformations QR transformation
 Lecture Cholesky method QR decomposition Terminology Linear systems: Eigensystems: Jacobi transformations QR transformation Cholesky method: For a symmetric positive definite matrix, one can do an LU decomposition
Lecture Cholesky method QR decomposition Terminology Linear systems: Eigensystems: Jacobi transformations QR transformation Cholesky method: For a symmetric positive definite matrix, one can do an LU decomposition
Lecture 12. Linear systems of equations II. a 13. a 12. a 14. a a 22. a 23. a 34 a 41. a 32. a 33. a 42. a 43. a 44)
") 1 Introduction Lecture 12 Linear systems of equations II We have looked at Gauss-Jordan elimination and Gaussian elimination as ways to solve a linear system Ax=b. We now turn to the LU decomposition,
1 Introduction Lecture 12 Linear systems of equations II We have looked at Gauss-Jordan elimination and Gaussian elimination as ways to solve a linear system Ax=b. We now turn to the LU decomposition,
MA3232 Numerical Analysis Week 9. James Cooley (1926-)
") MA umerical Analysis Week 9 James Cooley (96-) James Cooley is an American mathematician. His most significant contribution to the world of mathematics and digital signal processing is the Fast Fourier
MA umerical Analysis Week 9 James Cooley (96-) James Cooley is an American mathematician. His most significant contribution to the world of mathematics and digital signal processing is the Fast Fourier
1.Chapter Objectives
 LU Factorization INDEX 1.Chapter objectives 2.Overview of LU factorization 2.1GAUSS ELIMINATION AS LU FACTORIZATION 2.2LU Factorization with Pivoting 2.3 MATLAB Function: lu 3. CHOLESKY FACTORIZATION 3.1
LU Factorization INDEX 1.Chapter objectives 2.Overview of LU factorization 2.1GAUSS ELIMINATION AS LU FACTORIZATION 2.2LU Factorization with Pivoting 2.3 MATLAB Function: lu 3. CHOLESKY FACTORIZATION 3.1
Lecture Note 7: Iterative methods for solving linear systems. Xiaoqun Zhang Shanghai Jiao Tong University
 Lecture Note 7: Iterative methods for solving linear systems Xiaoqun Zhang Shanghai Jiao Tong University Last updated: December 24, 2014 1.1 Review on linear algebra Norms of vectors and matrices vector
Lecture Note 7: Iterative methods for solving linear systems Xiaoqun Zhang Shanghai Jiao Tong University Last updated: December 24, 2014 1.1 Review on linear algebra Norms of vectors and matrices vector
Solving Linear Systems of Equations
 1 Solving Linear Systems of Equations Many practical problems could be reduced to solving a linear system of equations formulated as Ax = b This chapter studies the computational issues about directly
1 Solving Linear Systems of Equations Many practical problems could be reduced to solving a linear system of equations formulated as Ax = b This chapter studies the computational issues about directly
Solving Linear Systems
 Solving Linear Systems Iterative Solutions Methods Philippe B. Laval KSU Fall 207 Philippe B. Laval (KSU) Linear Systems Fall 207 / 2 Introduction We continue looking how to solve linear systems of the
Solving Linear Systems Iterative Solutions Methods Philippe B. Laval KSU Fall 207 Philippe B. Laval (KSU) Linear Systems Fall 207 / 2 Introduction We continue looking how to solve linear systems of the
7. LU factorization. factor-solve method. LU factorization. solving Ax = b with A nonsingular. the inverse of a nonsingular matrix
 EE507 - Computational Techniques for EE 7. LU factorization Jitkomut Songsiri factor-solve method LU factorization solving Ax = b with A nonsingular the inverse of a nonsingular matrix LU factorization
EE507 - Computational Techniques for EE 7. LU factorization Jitkomut Songsiri factor-solve method LU factorization solving Ax = b with A nonsingular the inverse of a nonsingular matrix LU factorization
STAT 309: MATHEMATICAL COMPUTATIONS I FALL 2018 LECTURE 13
 STAT 309: MATHEMATICAL COMPUTATIONS I FALL 208 LECTURE 3 need for pivoting we saw that under proper circumstances, we can write A LU where 0 0 0 u u 2 u n l 2 0 0 0 u 22 u 2n L l 3 l 32, U 0 0 0 l n l
STAT 309: MATHEMATICAL COMPUTATIONS I FALL 208 LECTURE 3 need for pivoting we saw that under proper circumstances, we can write A LU where 0 0 0 u u 2 u n l 2 0 0 0 u 22 u 2n L l 3 l 32, U 0 0 0 l n l
Notes for CS542G (Iterative Solvers for Linear Systems)
") Notes for CS542G (Iterative Solvers for Linear Systems) Robert Bridson November 20, 2007 1 The Basics We re now looking at efficient ways to solve the linear system of equations Ax = b where in this course,
Notes for CS542G (Iterative Solvers for Linear Systems) Robert Bridson November 20, 2007 1 The Basics We re now looking at efficient ways to solve the linear system of equations Ax = b where in this course,
Lecture 9: Numerical Linear Algebra Primer (February 11st)
") 10-725/36-725: Convex Optimization Spring 2015 Lecture 9: Numerical Linear Algebra Primer (February 11st) Lecturer: Ryan Tibshirani Scribes: Avinash Siravuru, Guofan Wu, Maosheng Liu Note: LaTeX template
10-725/36-725: Convex Optimization Spring 2015 Lecture 9: Numerical Linear Algebra Primer (February 11st) Lecturer: Ryan Tibshirani Scribes: Avinash Siravuru, Guofan Wu, Maosheng Liu Note: LaTeX template
Lecture 2 INF-MAT : , LU, symmetric LU, Positve (semi)definite, Cholesky, Semi-Cholesky
definite, Cholesky, Semi-Cholesky") Lecture 2 INF-MAT 4350 2009: 7.1-7.6, LU, symmetric LU, Positve (semi)definite, Cholesky, Semi-Cholesky Tom Lyche and Michael Floater Centre of Mathematics for Applications, Department of Informatics,
Lecture 2 INF-MAT 4350 2009: 7.1-7.6, LU, symmetric LU, Positve (semi)definite, Cholesky, Semi-Cholesky Tom Lyche and Michael Floater Centre of Mathematics for Applications, Department of Informatics,
MATRIX ALGEBRA AND SYSTEMS OF EQUATIONS. + + x 1 x 2. x n 8 (4) 3 4 2
 3 4 2") MATRIX ALGEBRA AND SYSTEMS OF EQUATIONS SYSTEMS OF EQUATIONS AND MATRICES Representation of a linear system The general system of m equations in n unknowns can be written a x + a 2 x 2 + + a n x n b a
MATRIX ALGEBRA AND SYSTEMS OF EQUATIONS SYSTEMS OF EQUATIONS AND MATRICES Representation of a linear system The general system of m equations in n unknowns can be written a x + a 2 x 2 + + a n x n b a
Gaussian Elimination for Linear Systems
 Gaussian Elimination for Linear Systems Tsung-Ming Huang Department of Mathematics National Taiwan Normal University October 3, 2011 1/56 Outline 1 Elementary matrices 2 LR-factorization 3 Gaussian elimination
Gaussian Elimination for Linear Systems Tsung-Ming Huang Department of Mathematics National Taiwan Normal University October 3, 2011 1/56 Outline 1 Elementary matrices 2 LR-factorization 3 Gaussian elimination
lecture 2 and 3: algorithms for linear algebra
 lecture 2 and 3: algorithms for linear algebra STAT 545: Introduction to computational statistics Vinayak Rao Department of Statistics, Purdue University August 27, 2018 Solving a system of linear equations
lecture 2 and 3: algorithms for linear algebra STAT 545: Introduction to computational statistics Vinayak Rao Department of Statistics, Purdue University August 27, 2018 Solving a system of linear equations
COURSE Iterative methods for solving linear systems
 COURSE 0 4.3. Iterative methods for solving linear systems Because of round-off errors, direct methods become less efficient than iterative methods for large systems (>00 000 variables). An iterative scheme
COURSE 0 4.3. Iterative methods for solving linear systems Because of round-off errors, direct methods become less efficient than iterative methods for large systems (>00 000 variables). An iterative scheme
MATH2210 Notebook 2 Spring 2018
 MATH2210 Notebook 2 Spring 2018 prepared by Professor Jenny Baglivo c Copyright 2009 2018 by Jenny A. Baglivo. All Rights Reserved. 2 MATH2210 Notebook 2 3 2.1 Matrices and Their Operations................................
MATH2210 Notebook 2 Spring 2018 prepared by Professor Jenny Baglivo c Copyright 2009 2018 by Jenny A. Baglivo. All Rights Reserved. 2 MATH2210 Notebook 2 3 2.1 Matrices and Their Operations................................
Introduction to Mobile Robotics Compact Course on Linear Algebra. Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Diego Tipaldi, Luciano Spinello
 Introduction to Mobile Robotics Compact Course on Linear Algebra Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Diego Tipaldi, Luciano Spinello Vectors Arrays of numbers Vectors represent a point
Introduction to Mobile Robotics Compact Course on Linear Algebra Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Diego Tipaldi, Luciano Spinello Vectors Arrays of numbers Vectors represent a point
Linear Algebra in Actuarial Science: Slides to the lecture
 Linear Algebra in Actuarial Science: Slides to the lecture Fall Semester 2010/2011 Linear Algebra is a Tool-Box Linear Equation Systems Discretization of differential equations: solving linear equations
Linear Algebra in Actuarial Science: Slides to the lecture Fall Semester 2010/2011 Linear Algebra is a Tool-Box Linear Equation Systems Discretization of differential equations: solving linear equations
OR MSc Maths Revision Course
 OR MSc Maths Revision Course Tom Byrne School of Mathematics University of Edinburgh t.m.byrne@sms.ed.ac.uk 15 September 2017 General Information Today JCMB Lecture Theatre A, 09:30-12:30 Mathematics revision
OR MSc Maths Revision Course Tom Byrne School of Mathematics University of Edinburgh t.m.byrne@sms.ed.ac.uk 15 September 2017 General Information Today JCMB Lecture Theatre A, 09:30-12:30 Mathematics revision
Numerical Analysis: Solutions of System of. Linear Equation. Natasha S. Sharma, PhD
 Mathematical Question we are interested in answering numerically How to solve the following linear system for x Ax = b? where A is an n n invertible matrix and b is vector of length n. Notation: x denote
Mathematical Question we are interested in answering numerically How to solve the following linear system for x Ax = b? where A is an n n invertible matrix and b is vector of length n. Notation: x denote
Iterative Methods for Solving A x = b
 Iterative Methods for Solving A x = b A good (free) online source for iterative methods for solving A x = b is given in the description of a set of iterative solvers called templates found at netlib: http
Iterative Methods for Solving A x = b A good (free) online source for iterative methods for solving A x = b is given in the description of a set of iterative solvers called templates found at netlib: http
Applied Linear Algebra
 Applied Linear Algebra Gábor P. Nagy and Viktor Vígh University of Szeged Bolyai Institute Winter 2014 1 / 262 Table of contents I 1 Introduction, review Complex numbers Vectors and matrices Determinants
Applied Linear Algebra Gábor P. Nagy and Viktor Vígh University of Szeged Bolyai Institute Winter 2014 1 / 262 Table of contents I 1 Introduction, review Complex numbers Vectors and matrices Determinants
Introduction to Scientific Computing
 (Lecture 5: Linear system of equations / Matrix Splitting) Bojana Rosić, Thilo Moshagen Institute of Scientific Computing Motivation Let us resolve the problem scheme by using Kirchhoff s laws: the algebraic
(Lecture 5: Linear system of equations / Matrix Splitting) Bojana Rosić, Thilo Moshagen Institute of Scientific Computing Motivation Let us resolve the problem scheme by using Kirchhoff s laws: the algebraic
EAD 115. Numerical Solution of Engineering and Scientific Problems. David M. Rocke Department of Applied Science
 EAD 115 Numerical Solution of Engineering and Scientific Problems David M. Rocke Department of Applied Science Taylor s Theorem Can often approximate a function by a polynomial The error in the approximation
EAD 115 Numerical Solution of Engineering and Scientific Problems David M. Rocke Department of Applied Science Taylor s Theorem Can often approximate a function by a polynomial The error in the approximation
ECE133A Applied Numerical Computing Additional Lecture Notes
 Winter Quarter 2018 ECE133A Applied Numerical Computing Additional Lecture Notes L. Vandenberghe ii Contents 1 LU factorization 1 1.1 Definition................................. 1 1.2 Nonsingular sets
Winter Quarter 2018 ECE133A Applied Numerical Computing Additional Lecture Notes L. Vandenberghe ii Contents 1 LU factorization 1 1.1 Definition................................. 1 1.2 Nonsingular sets
Chapter 3 Transformations
 Chapter 3 Transformations An Introduction to Optimization Spring, 2014 Wei-Ta Chu 1 Linear Transformations A function is called a linear transformation if 1. for every and 2. for every If we fix the bases
Chapter 3 Transformations An Introduction to Optimization Spring, 2014 Wei-Ta Chu 1 Linear Transformations A function is called a linear transformation if 1. for every and 2. for every If we fix the bases
Gauss-Seidel method. Dr. Motilal Panigrahi. Dr. Motilal Panigrahi, Nirma University
 Gauss-Seidel method Dr. Motilal Panigrahi Solving system of linear equations We discussed Gaussian elimination with partial pivoting Gaussian elimination was an exact method or closed method Now we will
Gauss-Seidel method Dr. Motilal Panigrahi Solving system of linear equations We discussed Gaussian elimination with partial pivoting Gaussian elimination was an exact method or closed method Now we will