Boundary Value Problems - Solving 3-D Finite-Difference problems Jacob White
|
|
|
- Rudolf Harris
- 5 years ago
- Views:
Transcription
1 Introduction to Simulation - Lecture 2 Boundary Value Problems - Solving 3-D Finite-Difference problems Jacob White Thanks to Deepak Ramaswamy, Michal Rewienski, and Karen Veroy
2 Outline Reminder about FEM and F-D -D Example Finite Difference Matrices in, 2 and 3D Gaussian Elimination Costs Krylov Method Communication Lower bound Preconditioners based on improving communication
3 Heat Flow -D Example Normalized -D Equation Normalized Poisson Equation T( x) u( x) κ = h = s x x x 2 2 f ( x) u ( x) = f ( x) xx
4

5
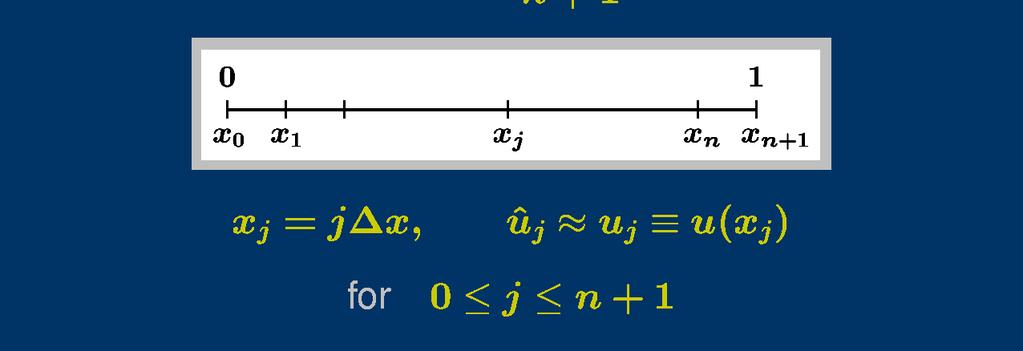
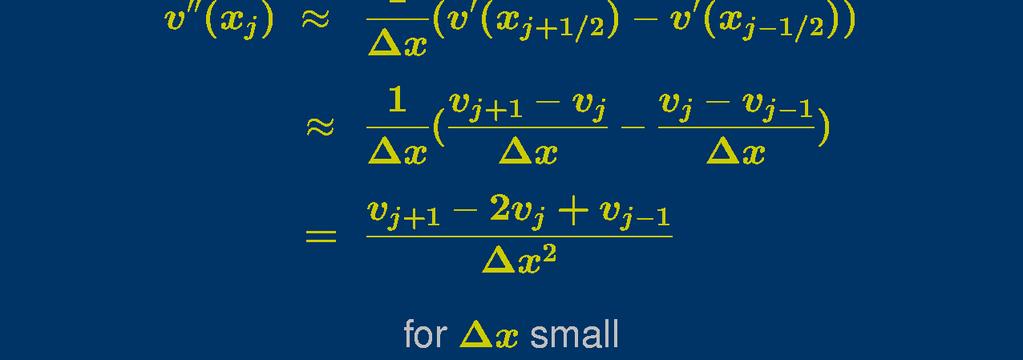
6 FD Matrix properties -D Poisson u = xx Finite Differences f x0 x x2 x uˆ 2uˆ uˆ + + = x j j j xn x n + 2 f( x ) uˆ f( x) L M M 2 O M M M 0 O O O 0 M = M M O O O M M 0 L 0 2 M M uˆ n f( xn) A 2 j
7 Using Basis Functions Residual Equation Partial Differential Equation form 2 u = 2 x Basis Function Representation f u(0) = 0 u() = 0 u( x) u ( ) ( ) h x ωi i x { ϕ Plug Basis Function Representation into the Equation d ϕ ( x) R x f x ( ) n = i= n 2 i = ωi + 2 i= dx Basis Functions ( )
8 Using Basis functions Basis Weights Galerkin Scheme Force the residual to be orthogonal to the basis functions ϕ ( ) ( ) l x R x dt = 0 Generates n equations in n unknowns 0 0 ϕ l ( ) d ( ) n 2 ϕi x ω ( ) i f x dx 2 i= dx x + = 0 l {,..., n}
9 Using Basis Functions Basis Weights Galerkin with integration by parts Only first derivatives of basis functions ( x) n d ωϕ ( x) i i i= dx ϕ ( x) f ( x) dx = i dx dϕ l dx l {,..., n}
10 Structural Analysis of Automobiles Equations Force-displacement relationships for mechanical elements (plates, beams, shells) and sum of forces = 0. Partial Differential Equations of Continuum Mechanics
11 Drag Force Analysis of Aircraft Equations Navier-Stokes Partial Differential Equations.
12 Engine Thermal Analysis Equations The Poisson Partial Differential Equation.
13 FD Matrix properties m x x2 x m + m 2-D Discretized Problem xm x2m Discretized Poisson uj+ 2uj + uj uj+ m 2uj + uj m + = x y u xx u yy f( x ) j
14 FD Matrix properties 2-D Discretized Problem Matrix Nonzeros, 5x5 example
15 FD Matrix properties m m 3-D Discretization Discretized Poisson x j m x 2 j m x j x j m x j + x 2 j + m x j + m uˆ 2 2 2ˆ ˆ ˆ ˆ 2 ˆ ˆ 2ˆ ˆ u uj u j+ uj+ uj uj+ m uj+ u + j m j+ m j m + + = ( x) ( y) ( z) u u u xx yy zz f ( x ) j

16 FD Matrix properties 3-D Discretization Matrix nonzeros, m = 4 example
17 FD Matrix properties Summary Numerical Properties Matrix is Irreducibly Diagonally Dominant Matrix is symmetric positive definite Assuming uniform discretization, diagonal is Aii Aij j i Each row is strictly diagonally dominant, or path connected to a strictly diagonally dominant row D 2, 2 D 4, 3 D 6, 2 2 2
18 FD Matrix properties Summary Structural Properties Matrices in 3-D are LARGE D m m, 2 D m m, 3 D m m 00x00x00 grid in 3-D = million x million matrix Matrices are very sparse Nonzeros per row D 3, 2 D 5, 3 D 7 Matrices are banded D A = 0 i j > 2 D A = 0 i j > m 3 D A = 0 i j > m ij ij ij 2
19 Basics of GE Triangularizing Picture A A A A A0 A A A A A0 A A A A 32 0 A A24 A33 A A0 A0 0A A 43 A 42 A A34 A A 44 A
20 GE Basics Triangularizing Algorithm For i = to n- { For each Row For j = i+ to n { For each Row below pivot For k = i+ to n { For each element beyond Pivot } } } A A A A ji jk jk ik Aii Multiplie r Pivot Form n- reciprocals (pivots) Form n i= Perform 2 n ( n i) = 2 n 2 ( n i) n 3 i= multipliers 2 3 Multiply-adds
21 Complexity of GE On = Om 3 3 D ( ) ( ) 00 pt grid On = Om D ( ) ( ) 00 0 On = Om 0grid 6 (0 ) ops O( 2 0 ) ops 00 g O(0 ) ops D ( ) ( ) rid O For 2- D and 3-D problems Need a Faster Solver!
22 b Banded GE b NONZEROS 0 Triangularizing Algorithm For i = to n- { For j = i+ to n i+b- { { For k = i+ to n { A A A A i+b- { ji jk jk ik Aii 0 } } } n i= Perform (min(, )) ( ) 2 2 b n i O b n Multiply-adds
23 Complexity of Banded GE Obn = Om 2 D ( ) ( ) 00 pt grid Obn = Om D ( ) ( ) grid 3 D Obn = Om O(00) ops 2 7 ( ) ( ) grid O 8 (0 ) ops O 4 (0 ) ops For 3 - D problems Need a Faster Solver!
24 The World According to Krylov Preconditioning Start with Ax = b, Form PAx = Pb 0 Determine the Krylov Subspace r = Pb PAx 0 0 k Krylov Subspace span r, PAr,..., PA r 0 { ( ) } Select Solution from the Krylov Subspace k k k k x + = x + y, y span r, PAr,..., PA r { ( ) } k GCR picks a residual minimizi ng y.
25 Krylov Methods Preconditioning Diagonal Preconditioners Let A = D + A nd Apply GCR to ( ) ( ) nd D A x = I + D A x= D b The Inverse of a diagonal is cheap to compute Usually improves convergence
26 Krylov Methods Convergence Analysis Optimality of GCR poly r GCR Optimality Property th % ( PA) r where % is any k order k + 0 k+ k+ polynomial such that % 0 = Therefore Any polynomial which satisfies the constraints can be used to get an upper bound on k+ ( ) k r r + 0
27 Residual Poly Picture for Heat Conducting Bar Matrix No loss to air (n=0) ( ) Keep as small as possible: k λi Easier if eigenvalues are clustered!
28 The World According to Krylov Krylov Vectors for diagonal Preconditioned A x ( digit) exact b 0 = r D A D A O 0 O O D A M 0 -D Discretized PDE = M0.5 0
29 The World According to Krylov Krylov Vectors for Diagonal Preconditioned A Communication Lower Bound x ( digit) exact b 0 = r D A D A Communication Lower Bound for m gridpoints ( ) k 0 th D A r is nonzero in m entry after k = m iters k ( k+ ) 0 j Need at least m iterations for x = x + α jr 0 m j= m
30 m The World According to Krylov m m 2 Krylov Vectors for Diagonal Preconditioned A Two Dimensional Case For an mxm Grid If r 0 0 = M 0 ( ) Takes 2m= O m iters ( x k + ) for 0 m 2
31 The World According to Krylov Convergence for GCR Eigenanalysis O 0 O O D A M 0 = M0.5 0 kπ D A = m + Recall Eigenvalues of cos
32 The World According to Krylov k r r 0 κ Convergence for GCR Eigenanalysis max For D A, cos cos λmin m # Iters for GCR to achieve convergence k λ mπ π = + m+ k 2 κ convergence γ κ + tolerance γ log = 2 κ m log κ + Om ( ) GCR achieves Communication lower bound O(m)!
33 The World According to Krylov Work for Banded Gaussian Elimination, Relaxation and GCR Dimension Banded GE Sparse GE GCR 2 3 ( ) ( ) ( 2 ) O m O m O m ( 4) ( 3) ( 3) O m O m O m ( 7) ( 6) ( 4) O m O m O m GCR faster than banded GE in 2 and 3 dimensions Could be faster, 3-D matrix only m 3 nonzeros. Must defeat the communication lower bound!
34 The World According to Krylov How to get Faster Converging GCR Preconditioning is the Only Hope GCR already achieves Communication Lower bound for a diagonally preconditioned A Preconditioner must accelerate communication Multiplying by PA must move values by more than one grid point.
35 Preconditioning Approaches u 0 (new) û (new) û (old) û 2 (new) û 2 (old) û 3 Gauss-Seidel Preconditioning Physical View -D Discretized PDE Gauss Seidel (new) uˆn (new) uˆn u ˆn+ Each Iteration of Gauss-Seidel Relaxation moves data across the grid
36 Preconditioning Approaches x ( digit) exact b ( + ) ( + ) D L A D L A b ( + ) ( + ) D L A D L A 0 = r x x x x x x x x x x x x x x 0 = r x x x x x Gauss-Seidel Preconditioning Krylov Vectors Gauss-Seidel communicates quickly in only one direction -D Discretized PDE X=nonzero
37 Preconditioning Approaches u 0 (new) û (new) û (old) û 2 (new) û 2 (old) û 3 Gauss-Seidel Preconditioning Symmetric Gauss-Seidel (new) uˆn (new) uˆn u ˆn+ (new) uˆn 2 (newer) uˆn ˆ ( new u ) n u (newer) û 0 (newer) û 2 This symmetric Gauss-Seidel Preconditioner Communicates both directions
38 Preconditioning Approaches Gauss-Seidel Preconditioning Symmetric Gauss-Seidel Derivation of the SGS Iteration Equations Forward Sweep half step : k D + L x + Ux = b ( ) ( ) k+ /2 Backward Sweep half step : x = + D+ U x + Lx = b ( ) ( ) k k+ /2 ( ) ( ) k D U L D + L Ux ( ) ( ) + D+ U D+ U L( + ) k+ ( ) ( ) b D L b k k k x + = x D+ U D D+ L Ax + D + U D D+ L b ( ) ( )
39 Preconditioning Approaches Grid Block Diagonal Preconditioners Line Schemes Matrix m 2 Tridiagonal Matrices factor quickly
40 Preconditioning Approaches Grid Block Diagonal Preconditioners Line Schemes Problem Lines preconditioners communicate rapidly in only one direction Solution m 2 Do lines first in x, then in y. The Preconditioner is now two Tridiagonal solves, with variable reordering in between.
41 Preconditioning Approaches Block Diagonal Preconditioners Domain Decomposition Approach Break the domain into small blocks each with the same # of grid points The trade-off m 2 Fewer blocks means faster convergence, but more costly iterates
42 Preconditioning Approaches m points 2 l Block index Block Diagonal Preconditioners Domain Decomposition m 2 l m l 2 points m ( 2 B lock cost: factoring l l grids, O m l ), sparse GE l m GCR iters: Communication bound gives O iterations. l 3 Suggests insensitivity t o l: Algorithm is O m. ( ) Do you have to refactor every GCR iteration?
43 Preconditioning Approaches Grid Siedelerized Block Diagonal Preconditioners Line Schemes Matrix m 2
44 Preconditioning Approaches Grid Overlapping Domain Preconditioners Line based Schemes Matrix m 2 Bigger systems to solve, but can have faster convergence on tougher problems (not just Poisson).
45 Preconditioning Approaches i Incomplete Factorization Schemes Outline Reminder about Gaussian Elimination Computational Steps Fill-in for Sparse Matrices Greatly increases factorization cost Fill-in in a 2-D grid Incomplete Factorization Idea
46 Sparse Matrices Matrix Non zero structure X X X Fill-In Example Matrix after one GE step X X X X X 0 X X X0 X 0 X X X0 X X= Non zero Fill-ins
47 Sparse Matrices Fill-In Second Example Fill-ins Propagate X X X X X X X0 X0 0 X X X0 0 X X0 X0 Fill-ins from Step result in Fill-ins in step 2
48 Sparse Matrices Fill-In Pattern of a Filled-in Matrix Very Sparse Very Sparse Dense
49 Sparse Matrices Fill-In Unfactored Random Matrix

50 Sparse Matrices Fill-In Factored Random Matrix
51 Factoring 2-D Finite-Difference matrices Generated Fill-in Makes Factorization Expensive

52 FD Matrix properties 3-D Discretization Matrix nonzeros, m = 4 example
53 Preconditioning Approaches i Incomplete Factorization Schemes Key idea THROW AWAY FILL-INS! Throw away all fill-ins Throw away only fill-ins with small values Throw away fill-ins produced by other fill-ins Throw away fill-ins produced by fill-ins of other fill-ins, etc.
54 Summary 3-D BVP Examples Aerodynamics, Continuum Mechanics, Heat-Flow Finite Difference Matrices in, 2 and 3D Gaussian Elimination Costs Krylov Method Communication Lower bound Preconditioners based on improving communication
Laplace s Equation FEM Methods. Jacob White. Thanks to Deepak Ramaswamy, Michal Rewienski, and Karen Veroy, Jaime Peraire and Tony Patera
 Introduction to Simulation - Lecture 19 Laplace s Equation FEM Methods Jacob White Thanks to Deepak Ramaswamy, Michal Rewienski, and Karen Veroy, Jaime Peraire and Tony Patera Outline for Poisson Equation
Introduction to Simulation - Lecture 19 Laplace s Equation FEM Methods Jacob White Thanks to Deepak Ramaswamy, Michal Rewienski, and Karen Veroy, Jaime Peraire and Tony Patera Outline for Poisson Equation
9.1 Preconditioned Krylov Subspace Methods
 Chapter 9 PRECONDITIONING 9.1 Preconditioned Krylov Subspace Methods 9.2 Preconditioned Conjugate Gradient 9.3 Preconditioned Generalized Minimal Residual 9.4 Relaxation Method Preconditioners 9.5 Incomplete
Chapter 9 PRECONDITIONING 9.1 Preconditioned Krylov Subspace Methods 9.2 Preconditioned Conjugate Gradient 9.3 Preconditioned Generalized Minimal Residual 9.4 Relaxation Method Preconditioners 9.5 Incomplete
Computational Methods. Systems of Linear Equations
 Computational Methods Systems of Linear Equations Manfred Huber 2010 1 Systems of Equations Often a system model contains multiple variables (parameters) and contains multiple equations Multiple equations
Computational Methods Systems of Linear Equations Manfred Huber 2010 1 Systems of Equations Often a system model contains multiple variables (parameters) and contains multiple equations Multiple equations
LINEAR SYSTEMS (11) Intensive Computation
 Intensive Computation") LINEAR SYSTEMS () Intensive Computation 27-8 prof. Annalisa Massini Viviana Arrigoni EXACT METHODS:. GAUSSIAN ELIMINATION. 2. CHOLESKY DECOMPOSITION. ITERATIVE METHODS:. JACOBI. 2. GAUSS-SEIDEL 2 CHOLESKY
LINEAR SYSTEMS () Intensive Computation 27-8 prof. Annalisa Massini Viviana Arrigoni EXACT METHODS:. GAUSSIAN ELIMINATION. 2. CHOLESKY DECOMPOSITION. ITERATIVE METHODS:. JACOBI. 2. GAUSS-SEIDEL 2 CHOLESKY
Stabilization and Acceleration of Algebraic Multigrid Method
 Stabilization and Acceleration of Algebraic Multigrid Method Recursive Projection Algorithm A. Jemcov J.P. Maruszewski Fluent Inc. October 24, 2006 Outline 1 Need for Algorithm Stabilization and Acceleration
Stabilization and Acceleration of Algebraic Multigrid Method Recursive Projection Algorithm A. Jemcov J.P. Maruszewski Fluent Inc. October 24, 2006 Outline 1 Need for Algorithm Stabilization and Acceleration
Chapter 7 Iterative Techniques in Matrix Algebra
 Chapter 7 Iterative Techniques in Matrix Algebra Per-Olof Persson persson@berkeley.edu Department of Mathematics University of California, Berkeley Math 128B Numerical Analysis Vector Norms Definition
Chapter 7 Iterative Techniques in Matrix Algebra Per-Olof Persson persson@berkeley.edu Department of Mathematics University of California, Berkeley Math 128B Numerical Analysis Vector Norms Definition
The Conjugate Gradient Method
 The Conjugate Gradient Method Classical Iterations We have a problem, We assume that the matrix comes from a discretization of a PDE. The best and most popular model problem is, The matrix will be as large
The Conjugate Gradient Method Classical Iterations We have a problem, We assume that the matrix comes from a discretization of a PDE. The best and most popular model problem is, The matrix will be as large
Numerical Methods - Numerical Linear Algebra
 Numerical Methods - Numerical Linear Algebra Y. K. Goh Universiti Tunku Abdul Rahman 2013 Y. K. Goh (UTAR) Numerical Methods - Numerical Linear Algebra I 2013 1 / 62 Outline 1 Motivation 2 Solving Linear
Numerical Methods - Numerical Linear Algebra Y. K. Goh Universiti Tunku Abdul Rahman 2013 Y. K. Goh (UTAR) Numerical Methods - Numerical Linear Algebra I 2013 1 / 62 Outline 1 Motivation 2 Solving Linear
Lecture 18 Classical Iterative Methods
 Lecture 18 Classical Iterative Methods MIT 18.335J / 6.337J Introduction to Numerical Methods Per-Olof Persson November 14, 2006 1 Iterative Methods for Linear Systems Direct methods for solving Ax = b,
Lecture 18 Classical Iterative Methods MIT 18.335J / 6.337J Introduction to Numerical Methods Per-Olof Persson November 14, 2006 1 Iterative Methods for Linear Systems Direct methods for solving Ax = b,
Solving Linear Systems of Equations
 November 6, 2013 Introduction The type of problems that we have to solve are: Solve the system: A x = B, where a 11 a 1N a 12 a 2N A =.. a 1N a NN x = x 1 x 2. x N B = b 1 b 2. b N To find A 1 (inverse
November 6, 2013 Introduction The type of problems that we have to solve are: Solve the system: A x = B, where a 11 a 1N a 12 a 2N A =.. a 1N a NN x = x 1 x 2. x N B = b 1 b 2. b N To find A 1 (inverse
Scientific Computing with Case Studies SIAM Press, Lecture Notes for Unit VII Sparse Matrix
 Scientific Computing with Case Studies SIAM Press, 2009 http://www.cs.umd.edu/users/oleary/sccswebpage Lecture Notes for Unit VII Sparse Matrix Computations Part 1: Direct Methods Dianne P. O Leary c 2008
Scientific Computing with Case Studies SIAM Press, 2009 http://www.cs.umd.edu/users/oleary/sccswebpage Lecture Notes for Unit VII Sparse Matrix Computations Part 1: Direct Methods Dianne P. O Leary c 2008
The amount of work to construct each new guess from the previous one should be a small multiple of the number of nonzeros in A.
 AMSC/CMSC 661 Scientific Computing II Spring 2005 Solution of Sparse Linear Systems Part 2: Iterative methods Dianne P. O Leary c 2005 Solving Sparse Linear Systems: Iterative methods The plan: Iterative
AMSC/CMSC 661 Scientific Computing II Spring 2005 Solution of Sparse Linear Systems Part 2: Iterative methods Dianne P. O Leary c 2005 Solving Sparse Linear Systems: Iterative methods The plan: Iterative
Numerical Methods I Non-Square and Sparse Linear Systems
 Numerical Methods I Non-Square and Sparse Linear Systems Aleksandar Donev Courant Institute, NYU 1 donev@courant.nyu.edu 1 MATH-GA 2011.003 / CSCI-GA 2945.003, Fall 2014 September 25th, 2014 A. Donev (Courant
Numerical Methods I Non-Square and Sparse Linear Systems Aleksandar Donev Courant Institute, NYU 1 donev@courant.nyu.edu 1 MATH-GA 2011.003 / CSCI-GA 2945.003, Fall 2014 September 25th, 2014 A. Donev (Courant
Fast Methods for Integral Equations. Jacob White. Thanks to Deepak Ramaswamy, Michal Rewienski, and Karen Veroy
 Introduction to Simulation - Lecture 23 Fast Methods for Integral Equations Jacob White Thanks to Deepak Ramaswamy, Michal Rewienski, and Karen Veroy Outline Solving Discretized Integral Equations Using
Introduction to Simulation - Lecture 23 Fast Methods for Integral Equations Jacob White Thanks to Deepak Ramaswamy, Michal Rewienski, and Karen Veroy Outline Solving Discretized Integral Equations Using
Introduction to PDEs and Numerical Methods Lecture 7. Solving linear systems
 Platzhalter für Bild, Bild auf Titelfolie hinter das Logo einsetzen Introduction to PDEs and Numerical Methods Lecture 7. Solving linear systems Dr. Noemi Friedman, 09.2.205. Reminder: Instationary heat
Platzhalter für Bild, Bild auf Titelfolie hinter das Logo einsetzen Introduction to PDEs and Numerical Methods Lecture 7. Solving linear systems Dr. Noemi Friedman, 09.2.205. Reminder: Instationary heat
Math 471 (Numerical methods) Chapter 3 (second half). System of equations
 Chapter 3 (second half). System of equations") Math 47 (Numerical methods) Chapter 3 (second half). System of equations Overlap 3.5 3.8 of Bradie 3.5 LU factorization w/o pivoting. Motivation: ( ) A I Gaussian Elimination (U L ) where U is upper triangular
Math 47 (Numerical methods) Chapter 3 (second half). System of equations Overlap 3.5 3.8 of Bradie 3.5 LU factorization w/o pivoting. Motivation: ( ) A I Gaussian Elimination (U L ) where U is upper triangular
Lecture 9 Approximations of Laplace s Equation, Finite Element Method. Mathématiques appliquées (MATH0504-1) B. Dewals, C.
 B. Dewals, C.") Lecture 9 Approximations of Laplace s Equation, Finite Element Method Mathématiques appliquées (MATH54-1) B. Dewals, C. Geuzaine V1.2 23/11/218 1 Learning objectives of this lecture Apply the finite difference
Lecture 9 Approximations of Laplace s Equation, Finite Element Method Mathématiques appliquées (MATH54-1) B. Dewals, C. Geuzaine V1.2 23/11/218 1 Learning objectives of this lecture Apply the finite difference
AMS526: Numerical Analysis I (Numerical Linear Algebra for Computational and Data Sciences)
") AMS526: Numerical Analysis I (Numerical Linear Algebra for Computational and Data Sciences) Lecture 19: Computing the SVD; Sparse Linear Systems Xiangmin Jiao Stony Brook University Xiangmin Jiao Numerical
AMS526: Numerical Analysis I (Numerical Linear Algebra for Computational and Data Sciences) Lecture 19: Computing the SVD; Sparse Linear Systems Xiangmin Jiao Stony Brook University Xiangmin Jiao Numerical
Bindel, Fall 2016 Matrix Computations (CS 6210) Notes for
 Notes for") 1 Iteration basics Notes for 2016-11-07 An iterative solver for Ax = b is produces a sequence of approximations x (k) x. We always stop after finitely many steps, based on some convergence criterion, e.g.
1 Iteration basics Notes for 2016-11-07 An iterative solver for Ax = b is produces a sequence of approximations x (k) x. We always stop after finitely many steps, based on some convergence criterion, e.g.
Numerical Solution Techniques in Mechanical and Aerospace Engineering
 Numerical Solution Techniques in Mechanical and Aerospace Engineering Chunlei Liang LECTURE 3 Solvers of linear algebraic equations 3.1. Outline of Lecture Finite-difference method for a 2D elliptic PDE
Numerical Solution Techniques in Mechanical and Aerospace Engineering Chunlei Liang LECTURE 3 Solvers of linear algebraic equations 3.1. Outline of Lecture Finite-difference method for a 2D elliptic PDE
Today s class. Linear Algebraic Equations LU Decomposition. Numerical Methods, Fall 2011 Lecture 8. Prof. Jinbo Bi CSE, UConn
 Today s class Linear Algebraic Equations LU Decomposition 1 Linear Algebraic Equations Gaussian Elimination works well for solving linear systems of the form: AX = B What if you have to solve the linear
Today s class Linear Algebraic Equations LU Decomposition 1 Linear Algebraic Equations Gaussian Elimination works well for solving linear systems of the form: AX = B What if you have to solve the linear
AMS526: Numerical Analysis I (Numerical Linear Algebra)
") AMS526: Numerical Analysis I (Numerical Linear Algebra) Lecture 21: Sensitivity of Eigenvalues and Eigenvectors; Conjugate Gradient Method Xiangmin Jiao Stony Brook University Xiangmin Jiao Numerical Analysis
AMS526: Numerical Analysis I (Numerical Linear Algebra) Lecture 21: Sensitivity of Eigenvalues and Eigenvectors; Conjugate Gradient Method Xiangmin Jiao Stony Brook University Xiangmin Jiao Numerical Analysis
SOLVING SPARSE LINEAR SYSTEMS OF EQUATIONS. Chao Yang Computational Research Division Lawrence Berkeley National Laboratory Berkeley, CA, USA
 1 SOLVING SPARSE LINEAR SYSTEMS OF EQUATIONS Chao Yang Computational Research Division Lawrence Berkeley National Laboratory Berkeley, CA, USA 2 OUTLINE Sparse matrix storage format Basic factorization
1 SOLVING SPARSE LINEAR SYSTEMS OF EQUATIONS Chao Yang Computational Research Division Lawrence Berkeley National Laboratory Berkeley, CA, USA 2 OUTLINE Sparse matrix storage format Basic factorization
Scientific Computing
 Scientific Computing Direct solution methods Martin van Gijzen Delft University of Technology October 3, 2018 1 Program October 3 Matrix norms LU decomposition Basic algorithm Cost Stability Pivoting Pivoting
Scientific Computing Direct solution methods Martin van Gijzen Delft University of Technology October 3, 2018 1 Program October 3 Matrix norms LU decomposition Basic algorithm Cost Stability Pivoting Pivoting
Methods for Computing Periodic Steady-State Jacob White
 Introduction to Simulation - Lecture 15 Methods for Computing Periodic Steady-State Jacob White Thanks to Deepak Ramaswamy, Michal Rewienski, and Karen Veroy Outline Periodic Steady-state problems Application
Introduction to Simulation - Lecture 15 Methods for Computing Periodic Steady-State Jacob White Thanks to Deepak Ramaswamy, Michal Rewienski, and Karen Veroy Outline Periodic Steady-state problems Application
2.29 Numerical Fluid Mechanics Spring 2015 Lecture 9
 Spring 2015 Lecture 9 REVIEW Lecture 8: Direct Methods for solving (linear) algebraic equations Gauss Elimination LU decomposition/factorization Error Analysis for Linear Systems and Condition Numbers
Spring 2015 Lecture 9 REVIEW Lecture 8: Direct Methods for solving (linear) algebraic equations Gauss Elimination LU decomposition/factorization Error Analysis for Linear Systems and Condition Numbers
Linear Solvers. Andrew Hazel
 Linear Solvers Andrew Hazel Introduction Thus far we have talked about the formulation and discretisation of physical problems...... and stopped when we got to a discrete linear system of equations. Introduction
Linear Solvers Andrew Hazel Introduction Thus far we have talked about the formulation and discretisation of physical problems...... and stopped when we got to a discrete linear system of equations. Introduction
AMS526: Numerical Analysis I (Numerical Linear Algebra)
") AMS526: Numerical Analysis I (Numerical Linear Algebra) Lecture 24: Preconditioning and Multigrid Solver Xiangmin Jiao SUNY Stony Brook Xiangmin Jiao Numerical Analysis I 1 / 5 Preconditioning Motivation:
AMS526: Numerical Analysis I (Numerical Linear Algebra) Lecture 24: Preconditioning and Multigrid Solver Xiangmin Jiao SUNY Stony Brook Xiangmin Jiao Numerical Analysis I 1 / 5 Preconditioning Motivation:
Poisson Equation in 2D
 A Parallel Strategy Department of Mathematics and Statistics McMaster University March 31, 2010 Outline Introduction 1 Introduction Motivation Discretization Iterative Methods 2 Additive Schwarz Method
A Parallel Strategy Department of Mathematics and Statistics McMaster University March 31, 2010 Outline Introduction 1 Introduction Motivation Discretization Iterative Methods 2 Additive Schwarz Method
Lecture 8: Fast Linear Solvers (Part 7)
") Lecture 8: Fast Linear Solvers (Part 7) 1 Modified Gram-Schmidt Process with Reorthogonalization Test Reorthogonalization If Av k 2 + δ v k+1 2 = Av k 2 to working precision. δ = 10 3 2 Householder Arnoldi
Lecture 8: Fast Linear Solvers (Part 7) 1 Modified Gram-Schmidt Process with Reorthogonalization Test Reorthogonalization If Av k 2 + δ v k+1 2 = Av k 2 to working precision. δ = 10 3 2 Householder Arnoldi
Course Notes: Week 1
 Course Notes: Week 1 Math 270C: Applied Numerical Linear Algebra 1 Lecture 1: Introduction (3/28/11) We will focus on iterative methods for solving linear systems of equations (and some discussion of eigenvalues
Course Notes: Week 1 Math 270C: Applied Numerical Linear Algebra 1 Lecture 1: Introduction (3/28/11) We will focus on iterative methods for solving linear systems of equations (and some discussion of eigenvalues
Motivation: Sparse matrices and numerical PDE's
 Lecture 20: Numerical Linear Algebra #4 Iterative methods and Eigenproblems Outline 1) Motivation: beyond LU for Ax=b A little PDE's and sparse matrices A) Temperature Equation B) Poisson Equation 2) Splitting
Lecture 20: Numerical Linear Algebra #4 Iterative methods and Eigenproblems Outline 1) Motivation: beyond LU for Ax=b A little PDE's and sparse matrices A) Temperature Equation B) Poisson Equation 2) Splitting
9. Iterative Methods for Large Linear Systems
 EE507 - Computational Techniques for EE Jitkomut Songsiri 9. Iterative Methods for Large Linear Systems introduction splitting method Jacobi method Gauss-Seidel method successive overrelaxation (SOR) 9-1
EE507 - Computational Techniques for EE Jitkomut Songsiri 9. Iterative Methods for Large Linear Systems introduction splitting method Jacobi method Gauss-Seidel method successive overrelaxation (SOR) 9-1
AMS526: Numerical Analysis I (Numerical Linear Algebra) Lecture 23: GMRES and Other Krylov Subspace Methods; Preconditioning
 Lecture 23: GMRES and Other Krylov Subspace Methods; Preconditioning") AMS526: Numerical Analysis I (Numerical Linear Algebra) Lecture 23: GMRES and Other Krylov Subspace Methods; Preconditioning Xiangmin Jiao SUNY Stony Brook Xiangmin Jiao Numerical Analysis I 1 / 18 Outline
AMS526: Numerical Analysis I (Numerical Linear Algebra) Lecture 23: GMRES and Other Krylov Subspace Methods; Preconditioning Xiangmin Jiao SUNY Stony Brook Xiangmin Jiao Numerical Analysis I 1 / 18 Outline
Applied Mathematics 205. Unit V: Eigenvalue Problems. Lecturer: Dr. David Knezevic
 Applied Mathematics 205 Unit V: Eigenvalue Problems Lecturer: Dr. David Knezevic Unit V: Eigenvalue Problems Chapter V.4: Krylov Subspace Methods 2 / 51 Krylov Subspace Methods In this chapter we give
Applied Mathematics 205 Unit V: Eigenvalue Problems Lecturer: Dr. David Knezevic Unit V: Eigenvalue Problems Chapter V.4: Krylov Subspace Methods 2 / 51 Krylov Subspace Methods In this chapter we give
Direct Methods for Solving Linear Systems. Matrix Factorization
 Direct Methods for Solving Linear Systems Matrix Factorization Numerical Analysis (9th Edition) R L Burden & J D Faires Beamer Presentation Slides prepared by John Carroll Dublin City University c 2011
Direct Methods for Solving Linear Systems Matrix Factorization Numerical Analysis (9th Edition) R L Burden & J D Faires Beamer Presentation Slides prepared by John Carroll Dublin City University c 2011
Chapter Two: Numerical Methods for Elliptic PDEs. 1 Finite Difference Methods for Elliptic PDEs
 Chapter Two: Numerical Methods for Elliptic PDEs Finite Difference Methods for Elliptic PDEs.. Finite difference scheme. We consider a simple example u := subject to Dirichlet boundary conditions ( ) u
Chapter Two: Numerical Methods for Elliptic PDEs Finite Difference Methods for Elliptic PDEs.. Finite difference scheme. We consider a simple example u := subject to Dirichlet boundary conditions ( ) u
AMS 147 Computational Methods and Applications Lecture 17 Copyright by Hongyun Wang, UCSC
 Lecture 17 Copyright by Hongyun Wang, UCSC Recap: Solving linear system A x = b Suppose we are given the decomposition, A = L U. We solve (LU) x = b in 2 steps: *) Solve L y = b using the forward substitution
Lecture 17 Copyright by Hongyun Wang, UCSC Recap: Solving linear system A x = b Suppose we are given the decomposition, A = L U. We solve (LU) x = b in 2 steps: *) Solve L y = b using the forward substitution
Linear Algebraic Equations
 Linear Algebraic Equations 1 Fundamentals Consider the set of linear algebraic equations n a ij x i b i represented by Ax b j with [A b ] [A b] and (1a) r(a) rank of A (1b) Then Axb has a solution iff
Linear Algebraic Equations 1 Fundamentals Consider the set of linear algebraic equations n a ij x i b i represented by Ax b j with [A b ] [A b] and (1a) r(a) rank of A (1b) Then Axb has a solution iff
Scientific Computing WS 2018/2019. Lecture 9. Jürgen Fuhrmann Lecture 9 Slide 1
 Scientific Computing WS 2018/2019 Lecture 9 Jürgen Fuhrmann juergen.fuhrmann@wias-berlin.de Lecture 9 Slide 1 Lecture 9 Slide 2 Simple iteration with preconditioning Idea: Aû = b iterative scheme û = û
Scientific Computing WS 2018/2019 Lecture 9 Jürgen Fuhrmann juergen.fuhrmann@wias-berlin.de Lecture 9 Slide 1 Lecture 9 Slide 2 Simple iteration with preconditioning Idea: Aû = b iterative scheme û = û
Lab 1: Iterative Methods for Solving Linear Systems
 Lab 1: Iterative Methods for Solving Linear Systems January 22, 2017 Introduction Many real world applications require the solution to very large and sparse linear systems where direct methods such as
Lab 1: Iterative Methods for Solving Linear Systems January 22, 2017 Introduction Many real world applications require the solution to very large and sparse linear systems where direct methods such as
Contents. Preface... xi. Introduction...
 Contents Preface... xi Introduction... xv Chapter 1. Computer Architectures... 1 1.1. Different types of parallelism... 1 1.1.1. Overlap, concurrency and parallelism... 1 1.1.2. Temporal and spatial parallelism
Contents Preface... xi Introduction... xv Chapter 1. Computer Architectures... 1 1.1. Different types of parallelism... 1 1.1.1. Overlap, concurrency and parallelism... 1 1.1.2. Temporal and spatial parallelism
Linear Algebra Section 2.6 : LU Decomposition Section 2.7 : Permutations and transposes Wednesday, February 13th Math 301 Week #4
 Linear Algebra Section. : LU Decomposition Section. : Permutations and transposes Wednesday, February 1th Math 01 Week # 1 The LU Decomposition We learned last time that we can factor a invertible matrix
Linear Algebra Section. : LU Decomposition Section. : Permutations and transposes Wednesday, February 1th Math 01 Week # 1 The LU Decomposition We learned last time that we can factor a invertible matrix
Lecture 10b: iterative and direct linear solvers
 Lecture 10b: iterative and direct linear solvers MATH0504: Mathématiques appliquées X. Adriaens, J. Dular Université de Liège November 2018 Table of contents 1 Direct methods 2 Iterative methods Stationary
Lecture 10b: iterative and direct linear solvers MATH0504: Mathématiques appliquées X. Adriaens, J. Dular Université de Liège November 2018 Table of contents 1 Direct methods 2 Iterative methods Stationary
From Stationary Methods to Krylov Subspaces
 Week 6: Wednesday, Mar 7 From Stationary Methods to Krylov Subspaces Last time, we discussed stationary methods for the iterative solution of linear systems of equations, which can generally be written
Week 6: Wednesday, Mar 7 From Stationary Methods to Krylov Subspaces Last time, we discussed stationary methods for the iterative solution of linear systems of equations, which can generally be written
6. Iterative Methods for Linear Systems. The stepwise approach to the solution...
 6 Iterative Methods for Linear Systems The stepwise approach to the solution Miriam Mehl: 6 Iterative Methods for Linear Systems The stepwise approach to the solution, January 18, 2013 1 61 Large Sparse
6 Iterative Methods for Linear Systems The stepwise approach to the solution Miriam Mehl: 6 Iterative Methods for Linear Systems The stepwise approach to the solution, January 18, 2013 1 61 Large Sparse
On the choice of abstract projection vectors for second level preconditioners
 On the choice of abstract projection vectors for second level preconditioners C. Vuik 1, J.M. Tang 1, and R. Nabben 2 1 Delft University of Technology 2 Technische Universität Berlin Institut für Mathematik
On the choice of abstract projection vectors for second level preconditioners C. Vuik 1, J.M. Tang 1, and R. Nabben 2 1 Delft University of Technology 2 Technische Universität Berlin Institut für Mathematik
Solving linear systems (6 lectures)
") Chapter 2 Solving linear systems (6 lectures) 2.1 Solving linear systems: LU factorization (1 lectures) Reference: [Trefethen, Bau III] Lecture 20, 21 How do you solve Ax = b? (2.1.1) In numerical linear
Chapter 2 Solving linear systems (6 lectures) 2.1 Solving linear systems: LU factorization (1 lectures) Reference: [Trefethen, Bau III] Lecture 20, 21 How do you solve Ax = b? (2.1.1) In numerical linear
The Solution of Linear Systems AX = B
 Chapter 2 The Solution of Linear Systems AX = B 21 Upper-triangular Linear Systems We will now develop the back-substitution algorithm, which is useful for solving a linear system of equations that has
Chapter 2 The Solution of Linear Systems AX = B 21 Upper-triangular Linear Systems We will now develop the back-substitution algorithm, which is useful for solving a linear system of equations that has
Solving PDEs with Multigrid Methods p.1
 Solving PDEs with Multigrid Methods Scott MacLachlan maclachl@colorado.edu Department of Applied Mathematics, University of Colorado at Boulder Solving PDEs with Multigrid Methods p.1 Support and Collaboration
Solving PDEs with Multigrid Methods Scott MacLachlan maclachl@colorado.edu Department of Applied Mathematics, University of Colorado at Boulder Solving PDEs with Multigrid Methods p.1 Support and Collaboration
Iterative methods for Linear System
 Iterative methods for Linear System JASS 2009 Student: Rishi Patil Advisor: Prof. Thomas Huckle Outline Basics: Matrices and their properties Eigenvalues, Condition Number Iterative Methods Direct and
Iterative methods for Linear System JASS 2009 Student: Rishi Patil Advisor: Prof. Thomas Huckle Outline Basics: Matrices and their properties Eigenvalues, Condition Number Iterative Methods Direct and
LU Factorization. Marco Chiarandini. DM559 Linear and Integer Programming. Department of Mathematics & Computer Science University of Southern Denmark
 DM559 Linear and Integer Programming LU Factorization Marco Chiarandini Department of Mathematics & Computer Science University of Southern Denmark [Based on slides by Lieven Vandenberghe, UCLA] Outline
DM559 Linear and Integer Programming LU Factorization Marco Chiarandini Department of Mathematics & Computer Science University of Southern Denmark [Based on slides by Lieven Vandenberghe, UCLA] Outline
AMS526: Numerical Analysis I (Numerical Linear Algebra)
") AMS526: Numerical Analysis I (Numerical Linear Algebra) Lecture 12: Gaussian Elimination and LU Factorization Xiangmin Jiao SUNY Stony Brook Xiangmin Jiao Numerical Analysis I 1 / 10 Gaussian Elimination
AMS526: Numerical Analysis I (Numerical Linear Algebra) Lecture 12: Gaussian Elimination and LU Factorization Xiangmin Jiao SUNY Stony Brook Xiangmin Jiao Numerical Analysis I 1 / 10 Gaussian Elimination
Introduction to Simulation - Lecture 2. Equation Formulation Methods. Jacob White. Thanks to Deepak Ramaswamy, Michal Rewienski, and Karen Veroy
 Introduction to Simulation - Lecture Equation Formulation Methods Jacob White Thanks to Deepak Ramaswamy, Michal Rewienski, and Karen Veroy Outline Formulating Equations rom Schematics Struts and Joints
Introduction to Simulation - Lecture Equation Formulation Methods Jacob White Thanks to Deepak Ramaswamy, Michal Rewienski, and Karen Veroy Outline Formulating Equations rom Schematics Struts and Joints
Solution of Linear Equations
 Solution of Linear Equations (Com S 477/577 Notes) Yan-Bin Jia Sep 7, 07 We have discussed general methods for solving arbitrary equations, and looked at the special class of polynomial equations A subclass
Solution of Linear Equations (Com S 477/577 Notes) Yan-Bin Jia Sep 7, 07 We have discussed general methods for solving arbitrary equations, and looked at the special class of polynomial equations A subclass
Classical iterative methods for linear systems
 Classical iterative methods for linear systems Ed Bueler MATH 615 Numerical Analysis of Differential Equations 27 February 1 March, 2017 Ed Bueler (MATH 615 NADEs) Classical iterative methods for linear
Classical iterative methods for linear systems Ed Bueler MATH 615 Numerical Analysis of Differential Equations 27 February 1 March, 2017 Ed Bueler (MATH 615 NADEs) Classical iterative methods for linear
Here is an example of a block diagonal matrix with Jordan Blocks on the diagonal: J
 Class Notes 4: THE SPECTRAL RADIUS, NORM CONVERGENCE AND SOR. Math 639d Due Date: Feb. 7 (updated: February 5, 2018) In the first part of this week s reading, we will prove Theorem 2 of the previous class.
Class Notes 4: THE SPECTRAL RADIUS, NORM CONVERGENCE AND SOR. Math 639d Due Date: Feb. 7 (updated: February 5, 2018) In the first part of this week s reading, we will prove Theorem 2 of the previous class.
A Method for Constructing Diagonally Dominant Preconditioners based on Jacobi Rotations
 A Method for Constructing Diagonally Dominant Preconditioners based on Jacobi Rotations Jin Yun Yuan Plamen Y. Yalamov Abstract A method is presented to make a given matrix strictly diagonally dominant
A Method for Constructing Diagonally Dominant Preconditioners based on Jacobi Rotations Jin Yun Yuan Plamen Y. Yalamov Abstract A method is presented to make a given matrix strictly diagonally dominant
Review of matrices. Let m, n IN. A rectangle of numbers written like A =
 Review of matrices Let m, n IN. A rectangle of numbers written like a 11 a 12... a 1n a 21 a 22... a 2n A =...... a m1 a m2... a mn where each a ij IR is called a matrix with m rows and n columns or an
Review of matrices Let m, n IN. A rectangle of numbers written like a 11 a 12... a 1n a 21 a 22... a 2n A =...... a m1 a m2... a mn where each a ij IR is called a matrix with m rows and n columns or an
EXAMPLES OF CLASSICAL ITERATIVE METHODS
 EXAMPLES OF CLASSICAL ITERATIVE METHODS In these lecture notes we revisit a few classical fixpoint iterations for the solution of the linear systems of equations. We focus on the algebraic and algorithmic
EXAMPLES OF CLASSICAL ITERATIVE METHODS In these lecture notes we revisit a few classical fixpoint iterations for the solution of the linear systems of equations. We focus on the algebraic and algorithmic
Lecture Note 7: Iterative methods for solving linear systems. Xiaoqun Zhang Shanghai Jiao Tong University
 Lecture Note 7: Iterative methods for solving linear systems Xiaoqun Zhang Shanghai Jiao Tong University Last updated: December 24, 2014 1.1 Review on linear algebra Norms of vectors and matrices vector
Lecture Note 7: Iterative methods for solving linear systems Xiaoqun Zhang Shanghai Jiao Tong University Last updated: December 24, 2014 1.1 Review on linear algebra Norms of vectors and matrices vector
LU Factorization. LU Decomposition. LU Decomposition. LU Decomposition: Motivation A = LU
 LU Factorization To further improve the efficiency of solving linear systems Factorizations of matrix A : LU and QR LU Factorization Methods: Using basic Gaussian Elimination (GE) Factorization of Tridiagonal
LU Factorization To further improve the efficiency of solving linear systems Factorizations of matrix A : LU and QR LU Factorization Methods: Using basic Gaussian Elimination (GE) Factorization of Tridiagonal
Introduction to Compact Dynamical Modeling. II.1 Steady State Simulation. Luca Daniel Massachusetts Institute of Technology. dx dt.
 Course Outline NS & NIH Introduction to Compact Dynamical Modeling II. Steady State Simulation uca Daniel Massachusetts Institute o Technology Quic Snea Preview I. ssembling Models rom Physical Problems
Course Outline NS & NIH Introduction to Compact Dynamical Modeling II. Steady State Simulation uca Daniel Massachusetts Institute o Technology Quic Snea Preview I. ssembling Models rom Physical Problems
MATH 3511 Lecture 1. Solving Linear Systems 1
 MATH 3511 Lecture 1 Solving Linear Systems 1 Dmitriy Leykekhman Spring 2012 Goals Review of basic linear algebra Solution of simple linear systems Gaussian elimination D Leykekhman - MATH 3511 Introduction
MATH 3511 Lecture 1 Solving Linear Systems 1 Dmitriy Leykekhman Spring 2012 Goals Review of basic linear algebra Solution of simple linear systems Gaussian elimination D Leykekhman - MATH 3511 Introduction
CLASSICAL ITERATIVE METHODS
 CLASSICAL ITERATIVE METHODS LONG CHEN In this notes we discuss classic iterative methods on solving the linear operator equation (1) Au = f, posed on a finite dimensional Hilbert space V = R N equipped
CLASSICAL ITERATIVE METHODS LONG CHEN In this notes we discuss classic iterative methods on solving the linear operator equation (1) Au = f, posed on a finite dimensional Hilbert space V = R N equipped
2.1 Gaussian Elimination
 2. Gaussian Elimination A common problem encountered in numerical models is the one in which there are n equations and n unknowns. The following is a description of the Gaussian elimination method for
2. Gaussian Elimination A common problem encountered in numerical models is the one in which there are n equations and n unknowns. The following is a description of the Gaussian elimination method for
Numerical Analysis: Solutions of System of. Linear Equation. Natasha S. Sharma, PhD
 Mathematical Question we are interested in answering numerically How to solve the following linear system for x Ax = b? where A is an n n invertible matrix and b is vector of length n. Notation: x denote
Mathematical Question we are interested in answering numerically How to solve the following linear system for x Ax = b? where A is an n n invertible matrix and b is vector of length n. Notation: x denote
CAAM 454/554: Stationary Iterative Methods
 CAAM 454/554: Stationary Iterative Methods Yin Zhang (draft) CAAM, Rice University, Houston, TX 77005 2007, Revised 2010 Abstract Stationary iterative methods for solving systems of linear equations are
CAAM 454/554: Stationary Iterative Methods Yin Zhang (draft) CAAM, Rice University, Houston, TX 77005 2007, Revised 2010 Abstract Stationary iterative methods for solving systems of linear equations are
Last Time. Social Network Graphs Betweenness. Graph Laplacian. Girvan-Newman Algorithm. Spectral Bisection
 Eigenvalue Problems Last Time Social Network Graphs Betweenness Girvan-Newman Algorithm Graph Laplacian Spectral Bisection λ 2, w 2 Today Small deviation into eigenvalue problems Formulation Standard eigenvalue
Eigenvalue Problems Last Time Social Network Graphs Betweenness Girvan-Newman Algorithm Graph Laplacian Spectral Bisection λ 2, w 2 Today Small deviation into eigenvalue problems Formulation Standard eigenvalue
Notes for CS542G (Iterative Solvers for Linear Systems)
") Notes for CS542G (Iterative Solvers for Linear Systems) Robert Bridson November 20, 2007 1 The Basics We re now looking at efficient ways to solve the linear system of equations Ax = b where in this course,
Notes for CS542G (Iterative Solvers for Linear Systems) Robert Bridson November 20, 2007 1 The Basics We re now looking at efficient ways to solve the linear system of equations Ax = b where in this course,
Preconditioning Techniques Analysis for CG Method
 Preconditioning Techniques Analysis for CG Method Huaguang Song Department of Computer Science University of California, Davis hso@ucdavis.edu Abstract Matrix computation issue for solve linear system
Preconditioning Techniques Analysis for CG Method Huaguang Song Department of Computer Science University of California, Davis hso@ucdavis.edu Abstract Matrix computation issue for solve linear system
JACOBI S ITERATION METHOD
 ITERATION METHODS These are methods which compute a sequence of progressively accurate iterates to approximate the solution of Ax = b. We need such methods for solving many large linear systems. Sometimes
ITERATION METHODS These are methods which compute a sequence of progressively accurate iterates to approximate the solution of Ax = b. We need such methods for solving many large linear systems. Sometimes
A NEW EFFECTIVE PRECONDITIONED METHOD FOR L-MATRICES
 Journal of Mathematical Sciences: Advances and Applications Volume, Number 2, 2008, Pages 3-322 A NEW EFFECTIVE PRECONDITIONED METHOD FOR L-MATRICES Department of Mathematics Taiyuan Normal University
Journal of Mathematical Sciences: Advances and Applications Volume, Number 2, 2008, Pages 3-322 A NEW EFFECTIVE PRECONDITIONED METHOD FOR L-MATRICES Department of Mathematics Taiyuan Normal University
APPLIED NUMERICAL LINEAR ALGEBRA
 APPLIED NUMERICAL LINEAR ALGEBRA James W. Demmel University of California Berkeley, California Society for Industrial and Applied Mathematics Philadelphia Contents Preface 1 Introduction 1 1.1 Basic Notation
APPLIED NUMERICAL LINEAR ALGEBRA James W. Demmel University of California Berkeley, California Society for Industrial and Applied Mathematics Philadelphia Contents Preface 1 Introduction 1 1.1 Basic Notation
Algebra C Numerical Linear Algebra Sample Exam Problems
 Algebra C Numerical Linear Algebra Sample Exam Problems Notation. Denote by V a finite-dimensional Hilbert space with inner product (, ) and corresponding norm. The abbreviation SPD is used for symmetric
Algebra C Numerical Linear Algebra Sample Exam Problems Notation. Denote by V a finite-dimensional Hilbert space with inner product (, ) and corresponding norm. The abbreviation SPD is used for symmetric
Lecture 11. Fast Linear Solvers: Iterative Methods. J. Chaudhry. Department of Mathematics and Statistics University of New Mexico
 Lecture 11 Fast Linear Solvers: Iterative Methods J. Chaudhry Department of Mathematics and Statistics University of New Mexico J. Chaudhry (UNM) Math/CS 375 1 / 23 Summary: Complexity of Linear Solves
Lecture 11 Fast Linear Solvers: Iterative Methods J. Chaudhry Department of Mathematics and Statistics University of New Mexico J. Chaudhry (UNM) Math/CS 375 1 / 23 Summary: Complexity of Linear Solves
Parallel Numerics, WT 2016/ Iterative Methods for Sparse Linear Systems of Equations. page 1 of 1
 Parallel Numerics, WT 2016/2017 5 Iterative Methods for Sparse Linear Systems of Equations page 1 of 1 Contents 1 Introduction 1.1 Computer Science Aspects 1.2 Numerical Problems 1.3 Graphs 1.4 Loop Manipulations
Parallel Numerics, WT 2016/2017 5 Iterative Methods for Sparse Linear Systems of Equations page 1 of 1 Contents 1 Introduction 1.1 Computer Science Aspects 1.2 Numerical Problems 1.3 Graphs 1.4 Loop Manipulations
CS 246 Review of Linear Algebra 01/17/19
 1 Linear algebra In this section we will discuss vectors and matrices. We denote the (i, j)th entry of a matrix A as A ij, and the ith entry of a vector as v i. 1.1 Vectors and vector operations A vector
1 Linear algebra In this section we will discuss vectors and matrices. We denote the (i, j)th entry of a matrix A as A ij, and the ith entry of a vector as v i. 1.1 Vectors and vector operations A vector
Background. Background. C. T. Kelley NC State University tim C. T. Kelley Background NCSU, Spring / 58
 Background C. T. Kelley NC State University tim kelley@ncsu.edu C. T. Kelley Background NCSU, Spring 2012 1 / 58 Notation vectors, matrices, norms l 1 : max col sum... spectral radius scaled integral norms
Background C. T. Kelley NC State University tim kelley@ncsu.edu C. T. Kelley Background NCSU, Spring 2012 1 / 58 Notation vectors, matrices, norms l 1 : max col sum... spectral radius scaled integral norms
Lecture 9: Numerical Linear Algebra Primer (February 11st)
") 10-725/36-725: Convex Optimization Spring 2015 Lecture 9: Numerical Linear Algebra Primer (February 11st) Lecturer: Ryan Tibshirani Scribes: Avinash Siravuru, Guofan Wu, Maosheng Liu Note: LaTeX template
10-725/36-725: Convex Optimization Spring 2015 Lecture 9: Numerical Linear Algebra Primer (February 11st) Lecturer: Ryan Tibshirani Scribes: Avinash Siravuru, Guofan Wu, Maosheng Liu Note: LaTeX template
Topics. The CG Algorithm Algorithmic Options CG s Two Main Convergence Theorems
 Topics The CG Algorithm Algorithmic Options CG s Two Main Convergence Theorems What about non-spd systems? Methods requiring small history Methods requiring large history Summary of solvers 1 / 52 Conjugate
Topics The CG Algorithm Algorithmic Options CG s Two Main Convergence Theorems What about non-spd systems? Methods requiring small history Methods requiring large history Summary of solvers 1 / 52 Conjugate
MA3232 Numerical Analysis Week 9. James Cooley (1926-)
") MA umerical Analysis Week 9 James Cooley (96-) James Cooley is an American mathematician. His most significant contribution to the world of mathematics and digital signal processing is the Fast Fourier
MA umerical Analysis Week 9 James Cooley (96-) James Cooley is an American mathematician. His most significant contribution to the world of mathematics and digital signal processing is the Fast Fourier
Iterative Methods. Splitting Methods
 Iterative Methods Splitting Methods 1 Direct Methods Solving Ax = b using direct methods. Gaussian elimination (using LU decomposition) Variants of LU, including Crout and Doolittle Other decomposition
Iterative Methods Splitting Methods 1 Direct Methods Solving Ax = b using direct methods. Gaussian elimination (using LU decomposition) Variants of LU, including Crout and Doolittle Other decomposition
Next topics: Solving systems of linear equations
 Next topics: Solving systems of linear equations 1 Gaussian elimination (today) 2 Gaussian elimination with partial pivoting (Week 9) 3 The method of LU-decomposition (Week 10) 4 Iterative techniques:
Next topics: Solving systems of linear equations 1 Gaussian elimination (today) 2 Gaussian elimination with partial pivoting (Week 9) 3 The method of LU-decomposition (Week 10) 4 Iterative techniques:
10.2 ITERATIVE METHODS FOR SOLVING LINEAR SYSTEMS. The Jacobi Method
 54 CHAPTER 10 NUMERICAL METHODS 10. ITERATIVE METHODS FOR SOLVING LINEAR SYSTEMS As a numerical technique, Gaussian elimination is rather unusual because it is direct. That is, a solution is obtained after
54 CHAPTER 10 NUMERICAL METHODS 10. ITERATIVE METHODS FOR SOLVING LINEAR SYSTEMS As a numerical technique, Gaussian elimination is rather unusual because it is direct. That is, a solution is obtained after
A Linear Multigrid Preconditioner for the solution of the Navier-Stokes Equations using a Discontinuous Galerkin Discretization. Laslo Tibor Diosady
 A Linear Multigrid Preconditioner for the solution of the Navier-Stokes Equations using a Discontinuous Galerkin Discretization by Laslo Tibor Diosady B.A.Sc., University of Toronto (2005) Submitted to
A Linear Multigrid Preconditioner for the solution of the Navier-Stokes Equations using a Discontinuous Galerkin Discretization by Laslo Tibor Diosady B.A.Sc., University of Toronto (2005) Submitted to
Preface to the Second Edition. Preface to the First Edition
 n page v Preface to the Second Edition Preface to the First Edition xiii xvii 1 Background in Linear Algebra 1 1.1 Matrices................................. 1 1.2 Square Matrices and Eigenvalues....................
n page v Preface to the Second Edition Preface to the First Edition xiii xvii 1 Background in Linear Algebra 1 1.1 Matrices................................. 1 1.2 Square Matrices and Eigenvalues....................
FEM and Sparse Linear System Solving
 FEM & sparse system solving, Lecture 7, Nov 3, 2017 1/46 Lecture 7, Nov 3, 2015: Introduction to Iterative Solvers: Stationary Methods http://people.inf.ethz.ch/arbenz/fem16 Peter Arbenz Computer Science
FEM & sparse system solving, Lecture 7, Nov 3, 2017 1/46 Lecture 7, Nov 3, 2015: Introduction to Iterative Solvers: Stationary Methods http://people.inf.ethz.ch/arbenz/fem16 Peter Arbenz Computer Science
Introduction - Motivation. Many phenomena (physical, chemical, biological, etc.) are model by differential equations. f f(x + h) f(x) (x) = lim
 are model by differential equations. f f(x + h) f(x) (x) = lim") Introduction - Motivation Many phenomena (physical, chemical, biological, etc.) are model by differential equations. Recall the definition of the derivative of f(x) f f(x + h) f(x) (x) = lim. h 0 h Its
Introduction - Motivation Many phenomena (physical, chemical, biological, etc.) are model by differential equations. Recall the definition of the derivative of f(x) f f(x + h) f(x) (x) = lim. h 0 h Its
MATH 315 Linear Algebra Homework #1 Assigned: August 20, 2018
 Homework #1 Assigned: August 20, 2018 Review the following subjects involving systems of equations and matrices from Calculus II. Linear systems of equations Converting systems to matrix form Pivot entry
Homework #1 Assigned: August 20, 2018 Review the following subjects involving systems of equations and matrices from Calculus II. Linear systems of equations Converting systems to matrix form Pivot entry
Gaussian Elimination and Back Substitution
 Jim Lambers MAT 610 Summer Session 2009-10 Lecture 4 Notes These notes correspond to Sections 31 and 32 in the text Gaussian Elimination and Back Substitution The basic idea behind methods for solving
Jim Lambers MAT 610 Summer Session 2009-10 Lecture 4 Notes These notes correspond to Sections 31 and 32 in the text Gaussian Elimination and Back Substitution The basic idea behind methods for solving
Conjugate gradient method. Descent method. Conjugate search direction. Conjugate Gradient Algorithm (294)
") Conjugate gradient method Descent method Hestenes, Stiefel 1952 For A N N SPD In exact arithmetic, solves in N steps In real arithmetic No guaranteed stopping Often converges in many fewer than N steps
Conjugate gradient method Descent method Hestenes, Stiefel 1952 For A N N SPD In exact arithmetic, solves in N steps In real arithmetic No guaranteed stopping Often converges in many fewer than N steps
Notes on PCG for Sparse Linear Systems
 Notes on PCG for Sparse Linear Systems Luca Bergamaschi Department of Civil Environmental and Architectural Engineering University of Padova e-mail luca.bergamaschi@unipd.it webpage www.dmsa.unipd.it/
Notes on PCG for Sparse Linear Systems Luca Bergamaschi Department of Civil Environmental and Architectural Engineering University of Padova e-mail luca.bergamaschi@unipd.it webpage www.dmsa.unipd.it/
Process Model Formulation and Solution, 3E4
 Process Model Formulation and Solution, 3E4 Section B: Linear Algebraic Equations Instructor: Kevin Dunn dunnkg@mcmasterca Department of Chemical Engineering Course notes: Dr Benoît Chachuat 06 October
Process Model Formulation and Solution, 3E4 Section B: Linear Algebraic Equations Instructor: Kevin Dunn dunnkg@mcmasterca Department of Chemical Engineering Course notes: Dr Benoît Chachuat 06 October
Iterative Methods for Solving A x = b
 Iterative Methods for Solving A x = b A good (free) online source for iterative methods for solving A x = b is given in the description of a set of iterative solvers called templates found at netlib: http
Iterative Methods for Solving A x = b A good (free) online source for iterative methods for solving A x = b is given in the description of a set of iterative solvers called templates found at netlib: http
Solving Sparse Linear Systems: Iterative methods
 Scientific Computing with Case Studies SIAM Press, 2009 http://www.cs.umd.edu/users/oleary/sccs Lecture Notes for Unit VII Sparse Matrix Computations Part 2: Iterative Methods Dianne P. O Leary c 2008,2010
Scientific Computing with Case Studies SIAM Press, 2009 http://www.cs.umd.edu/users/oleary/sccs Lecture Notes for Unit VII Sparse Matrix Computations Part 2: Iterative Methods Dianne P. O Leary c 2008,2010
Solving Sparse Linear Systems: Iterative methods
 Scientific Computing with Case Studies SIAM Press, 2009 http://www.cs.umd.edu/users/oleary/sccswebpage Lecture Notes for Unit VII Sparse Matrix Computations Part 2: Iterative Methods Dianne P. O Leary
Scientific Computing with Case Studies SIAM Press, 2009 http://www.cs.umd.edu/users/oleary/sccswebpage Lecture Notes for Unit VII Sparse Matrix Computations Part 2: Iterative Methods Dianne P. O Leary
Preliminary/Qualifying Exam in Numerical Analysis (Math 502a) Spring 2012
 Spring 2012") Instructions Preliminary/Qualifying Exam in Numerical Analysis (Math 502a) Spring 2012 The exam consists of four problems, each having multiple parts. You should attempt to solve all four problems. 1.
Instructions Preliminary/Qualifying Exam in Numerical Analysis (Math 502a) Spring 2012 The exam consists of four problems, each having multiple parts. You should attempt to solve all four problems. 1.
Sparse Linear Systems. Iterative Methods for Sparse Linear Systems. Motivation for Studying Sparse Linear Systems. Partial Differential Equations
 Sparse Linear Systems Iterative Methods for Sparse Linear Systems Matrix Computations and Applications, Lecture C11 Fredrik Bengzon, Robert Söderlund We consider the problem of solving the linear system
Sparse Linear Systems Iterative Methods for Sparse Linear Systems Matrix Computations and Applications, Lecture C11 Fredrik Bengzon, Robert Söderlund We consider the problem of solving the linear system
COURSE Iterative methods for solving linear systems
 COURSE 0 4.3. Iterative methods for solving linear systems Because of round-off errors, direct methods become less efficient than iterative methods for large systems (>00 000 variables). An iterative scheme
COURSE 0 4.3. Iterative methods for solving linear systems Because of round-off errors, direct methods become less efficient than iterative methods for large systems (>00 000 variables). An iterative scheme