The wave equation. Paris-Sud, Orsay, December 06
|
|
|
- Dustin Curtis
- 5 years ago
- Views:
Transcription
1 Paris-Sud, Orsay, December 06 The wave equation Enrique Zuazua Universidad Autónoma Madrid, Spain
2 Work in collaboration with: C. Castro, M. Cea, L. Ignat, J.A. Infante, L. León, F. Macià, S. Micu, A. Munch, M. Negreanu, J. Rasmussen, L. R. Tcheougoué,... Inspired, in particular, on ideas by and discussions with: P. Gérard, R. Glowinski, G. Lebeau, J.L. Lions, N. Trefethen,... E. Z. Propagation, observation, and control of waves approximated by finite difference methods. SIAM Review, 47 (2) (2005),
3 2.- The wave equation: 2.1. Control and observation of waves: an introduction 2.2 Pathological numerical schemes for the 1-d wave equation 2.3 Nonharmonic Fourier series and remedies to the divergence of controls. 2.4 The two-grid algorithm in 1-d 2.5 Links with the dynamical properties of bicharacteristic rays. 2.6 The two-grid algorithm in the multi-dimensional case.
4 2.7 Links with waves in heterogenous media 2.8 Stabilization 2.9 Semilinear wave equations 2.10 Schrödinger and plate equations
5 2.1. Control and observation of waves: an introduction Motivation IS THE CONTROL OF WAVES AND, MORE PARTICULARLY, OF THE WAVE EQUATION RELEVANT? The answer is, definitely, YES.
6 Noise reduction in cavities and vehicles. Closed-loop control diagram. reduction.html
7 Quantum control and Computing. Laser control in Quantum mechanical and molecular systems to design coherent vibrational states. In this case the fundamental equation is the Schrödinger one. Most of the theory we shall develop here applies in this case too. The Schrödinger equation may be viewed as a wave equation with inifnite speed of propagation.
8 P. Brumer and M. Shapiro, Laser Control of Chemical reactions, Scientific American, March, 1995, pp

9 Seismic waves, earthquakes. F. Cotton, P.-Y. Bard, C. Berge et D. Hatzfeld, Qu est-ce qui fait vibrer Grenoble?, La Recherche, 320, Mai, 1999,

10 Flexible structures. SIAM Report on Future Directions in Control Theory. A Mathematical Perspective, W. H. Fleming, ed., 1988.

11 Environment. The Thames barrier.

12 Optimal shape design in aeronautics. Optimal shape design of a wing within an Euler flow, for drag reduction.
13 THE 1-D CONTROL PROBLEM The 1-d wave equation, with Dirichlet boundary conditions, describing the vibrations of a flexible string, with control one one end: y tt y xx = 0, 0 < x < 1, 0 < t < T y(0, t) = 0; y(1, t) =v(t), 0 < t < T y(x, 0) = y 0 (x), y t (x, 0) = y 1 (x), 0 < x < 1 y = y(x, t) is the state and v = v(t) is the control. The goal is to stop the vibrations, i.e. to drive the solution to equilibrium in a given time T : Given initial data {y 0 (x), y 1 (x)} to find a control v = v(t) such that y(x, T ) = y t (x, T ) = 0, 0 < x < 1.
14
15 THE 1-D OBSERVATION PROBLEM The control problem above is equivalent to the following one, on the adjoint wave equation: ϕ tt ϕ xx = 0, 0 < x < 1, 0 < t < T ϕ(0, t) = ϕ(1, t) = 0, 0 < t < T ϕ(x, 0) = ϕ 0 (x), ϕ t (x, 0) = ϕ 1 (x), 0 < x < 1. The energy of solutions is conserved in time, i.e. 1 E(t) = 1 [ ϕx (x, t) 2 + ϕ t (x, t) 2] dx = E(0), 0 t T. 2 0 The question is then reduced to analyze whether the folllowing inequality is true. This is the so called observability inequality: E(0) C(T ) T 0 ϕ x(1, t) 2 dt.
16 The answer to this question is easy to gues: The observability inequality holds if and only if T 2. SUSTITUIR LA FIGURA SEGUNDA POR UNA DONDE HAYA PHI. VER ICM06,
17 Wave localized at t = 0 near the extreme x = 1 that propagates with velocity one to the left, bounces on the boundary point x = 0 and reaches the point of observation x = 1 in a time of the order of 2.
18 This observability inequality is easy to prove by several means. Use D Alambert s formula ϕ = f(x + t) + g(x t) indicating that information propagates along rays with velocity one, and bounces on the boundary points. Use the Fourier representation of solutions in which it is clearly seen that solutions are periodic with time-period 2. Multipliers: Multiply the equation by xϕ x, ϕ t and ϕ and integrate by parts...
19 CONSTRUCTION OF THE CONTROL: Once the observability inequality is known the control is easy to characterize. Following J.L. Lions HUM (Hilbert Uniqueness Method), the control is v(t) = ϕ x (1, t), where u is the solution of the adjoint system corresponding to initial data (ϕ 0, ϕ 1 ) H 1 0 (0, 1) L2 (0, 1) minimizing the functional T J(ϕ 0, ϕ 1 ) = 1 2 ϕ x(1, t) 2 dt+ 0 in the space H0 1(0, 1) L2 (0, 1). 1 0 y0 ϕ 1 dx < y 1, ϕ 0 > H 1 H0 1, Note that J is convex. The continuity of J in H 1 0 (0, 1) L2 (0, 1) is guaranteed by the fact that ϕ x (1, t) L 2 (0, T ) (hidden regularity).
20 Moreover, COERCIVITY OF J = OBSERVABILITY INEQUALITY. CONCLUSION: The 1-d wave equation is controllable from one end, in time 2, twice the length of the interval. Similar results are true in several space dimensions. The region in which the observation/control applies needs to be large enough to capture all rays of Geometric Optics.
21 THE CONTROL PROBLEM IN SEVERAL SPACE DIMENSIONS The same problems arise in several space dimensions: Let Ω be a bounded domain of R n, n 1, with boundary Γ of class C 2. Let Γ 0 be an open and non-empty subset of Γ and T > 0. y tt y = 0 in Q = Ω (0, T ) y =v(x, t)1 Γ0 on Σ = Γ (0, T ) y(x, 0) = y 0 (x), y t (x, 0) = y 1 (x) in Ω. The problem of controllability, generally speaking, is as follows: Given (y 0, y 1 ) L 2 (Ω) H 1 (Ω), find v L 2 (Γ 0 (0, T )) such that the solution of system (3.1) satisfies y(t ) y t (T ) 0.
22 The answer is by now well known (Bardos-Lebeau-Rauch, Burq- Gérard, Ralston,...): The wave equation is controllable from Γ 0 in time T if all rays of Geometric Optics intersect Γ 0 in a time less than T at a non-difractive point. This statement is an extension of the one above on the 1-d wave equation. But this time the proof requires much more sophisticated tools: Microlocal analysis, the propagation of microlocal deffect measures,...
23 Rays propagating inside the domain Ω following straight lines that are reflected on the boundary according to the laws of Geometric Optics. The control region is the red subset of the boundary. The GCC is satisfied in this case.
24 The Geometric Control Condition is not satisfied, whatever T > 0 is, in the square domain when the control is located on a subset of two consecutive sides of the boundary, leaving a subsegment uncontrolled. There is an horizontal a ray that bounces back and forth for all time perpendicularly on two points of the vertical boundaries where the control does not act.
25 In all cases the control is equivalent to an observation problem for the adjoint wave equation: Is it true that: ϕ tt ϕ = 0 in Q = Ω (0, T ) ϕ = 0 on Σ = Γ (0, T ) ϕ(x, 0) = ϕ 0 (x), ϕ t (x, 0) = ϕ 1 (x) in Ω. E 0 C(Γ 0, T ) T 0 Γ 0 ϕ 2 dσdt? n And a sharp discussion of this inequality requires of Microlocal analysis. Partial results may be obtained by means of multipliers: x ϕ, ϕ t, ϕ,...
26 2.2. Pathological numerical schemes for the 1 d wave equation THE PROBLEM: EFFICIENTLY COMPUTE NUMERICALLY THE CONTROL! WARNING! TWO DIFFERENT ISSUES: When a continuous model, written in PDE terms, is controllable, two important issues arise in the context of Numerical Simulation: Efficiently compute numerically the control.
27 To control a discrete model, a numerical discretized version of the continuous model. Both problems are relevant, but they may provide different results. Both approaches are often mixed in the literature (leading to uncertain results...)
28 A FACT THE PROCESSES OF CONTROL AND NUMERICS DO NOT COMMUTE CONTROL+NUMERICS NUMERICS+CONTROL FROM FINITE TO INFINITE DIMENSIONS IN PURELY CONSER- VATIVE SYSTEMS...
29 THE SEMI-DISCRETE PROBLEM: 1 D. Set h = 1/(N + 1) > 0 and consider the mesh x 0 = 0 < x 1 <... < x j = jh < x N = 1 h < x N+1 = 1, which divides [0, 1] into N + 1 subintervals I j = [x j, x j+1 ], j = 0,..., N. Finite difference semi-discrete approximation of the wave equation: ϕ j 1 [ ] h 2 ϕj+1 + ϕ j 1 2ϕ j = 0, 0 < t < T, j = 1,..., N ϕ j (t) = 0, j = 0, N + 1, 0 < t < T ϕ j (0) = ϕ 0 j, ϕ j (0) = ϕ1 j, j = 1,..., N.
30
31 The energy of the semi-discrete system (obviuosly a discrete version of the continuous one) E h (t) = h 2 It is constant in time. N j=0 [ ϕ j 2 + ϕ j+1 ϕ j h Is the following observability inequality true? ( E h (0) C h (T ) ϕ N(t) h T 0 = ϕ N+1 ϕ N (t) h ϕ N (t) YES! It is true for all h > 0 and for all time T. h 2 dt 2]. ϕ x (1, t). )
32 BUT, FOR ALL T > 0 (!!!!!) C h (T ), h 0. THE FOLLOWING INTUITIVE CONJECTURE IS COMPLETELY FALSE: * The constant C h (T ) blows-up for T < 2 as h 0 since the inequality fails for the wave equation. * The constant C h (T ) remains bounded for T 2 as h 0 and one recovers in the limit the observability inequality for the wave equation.
33 CONCLUSION The classical convergence (consistency+stability) does not guarantee continuous dependence for the observation problem with respect to the discretization parameter. WHY? Convergent numerical schemes do reproduce all continuous waves but, when doing that, they create a lot of spurious (non-realistic, purely numerical) high frequency solutions. This spurious solutions distroy the observation properties and are an obstacle for the controls to converge as the mesh-size gets finer and finer.
34 SPECTRAL ANALYSIS Eigenvalue problem 1 h 2 [ wj+1 + w j 1 2w j ] = λwj, j = 1,..., N w 0 = w N+1 = 0. The eigenvalues 0 < λ 1 (h) < λ 2 (h) < < λ N (h) are and the eigenvectors λ h k = 4 h 2 sin2 ( kπh 2 w h k = ( w k,1,..., w k,n ) T : wk,j = sin(kπjh), k, j = 1,..., N. It follows that λ h k λ k = k 2 π 2, as h 0 )
35 and the eigenvectors coincide with those of the wave equation. Then, the solutions of the semi-discrete system may be written in Fourier series as follows: N ) ϕ = a k cos ( λ h k t + b ) k k=1 λ h sin ( λ h k t w k h. k Compare with the Fourier representation of solutions of the continuous wave equation: ( ϕ = a k cos(kπt) + b ) k kπ sin(kπt) sin(kπx) k=1 The only relevant difference is that the time-frequencies do not quite coincide, but they converge as h 0.
36 DISPERSION DIAGRAM: LACK OF GAP. Graph of the square roots of the eigenvalues both in the continuous and in the discrete case. The gap is clearly independent of k in the continuous case while it is of the order of h for large k in the discrete one.
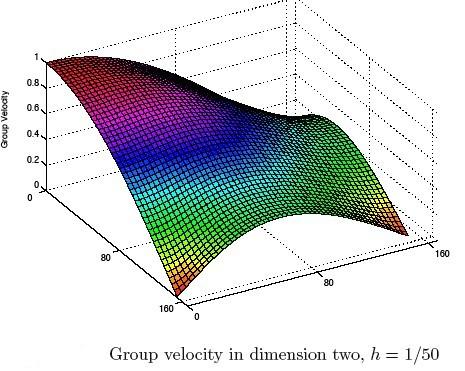
37 SPURIOUS NUMERICAL SOLUTION ϕ = exp ( ) i λ N (h) t w N exp ( ) i λ N 1 (h) t w N 1. Spurious semi-discrete wave combining the last two eigenfrequencies with very little gap: λ N (h) λ N 1 (h) h. Note that the gap is roughly the derivative of the dispersion curve. Thus this derivative determines the velocity of propagation of wave packets, the co called group velocity.

38 h = 1/61, (N = 60), 0 t 120. The solution exhibits a timeperiodicity property with period τ of the order of τ 50 which contradicts the time-periodicity of period 2 of the wave equation. High frequency wave packets travel at a group velocity h.

39
40 GAP = GROUP VELOCITY = VELOCITY OF PROPAGATION OF HIGH FREQUENCY WAVE PACKETS.
41 CONCLUSION The minima of J h diverge because its coercivity is vanishing as h 0; This is intimately related to the blow-up of the discrete observability constant C h (T ), for all T > 0 as h 0: E h (0) C h (T ) T 0 ϕ N (t) h 2 dt This is due to the lack of propagation of high frequency numerical waves due to the dispersion that the numerical grid produces.
42 Actually it is known that C h (T ) diverges exponentially: Sorin Micu, Uniform boundary controllability of a semi-discrete 1-D wave equation, Numer. Math., 91 (2002), pp In fact, by making combinations of an increasing finite number of high frequencies with nearby velocities of propagation one can build wave packets for which the observability constant blows-up polynomially at any rate. The construction by S. Micu is finer since it is based on explicit estimates on biorthogonal families to the families of complex exponentials entering in the Fourier expansion of solutions.
43 WHAT ARE THE CONSEQUENCES FOR CONTROL? Apply Banach-Steinhauss Theorem: Even when T > 2 (good control situation) there are intial data for the wave equation so that the controls of the semi-discrete problem diverge to infinity as h 0. THUS, CONTROLLING THE SEMI-DISCRETE SYSTEM IS NOT AN EFFICIENT WAY OF COMPUTING THE CONTROL OF THE WAVE EQUATION. CONTROL+NUMERICS NUMERICS+CONTROL
44 If the control requirement is sufficiently relaxed, this lack of commutativity does not occur. * Optimal control: min 1 2 * Approximate control: [ y(t ) 2 L 2 (0,1) + y t(t ) 2 ] 1 H 1 (0,1) + 2 T y(t ) L 2 (0,1) + y t((t ) H 1 (0,1) α. 0 v2 (t)dt. E. Z. Optimal and approximate control of finite-diffference schemes for the 1 D wave equation. Rendiconti di Matematica, Serie VIII, Vol. 24, Tomo II, 2004, Thi is also closely related to the technique based on the use of Tycchonoff regularization.
45 Then the controls of the discrete approximated models converge to the control of the continuous one. This can be seen by classical arguments in Numerical Analysis and in the context of Γ-convergence in the Calculus of Variations. This requires however a fine devlopment of numericalo analysis, allowing to deal, by transposition, with non-homogeneous boundary value problems, for instance.
46 What to do in practice? No general receipt. It depends on the application we have in mind. One has to make two choices: * Continuous modelling / Discrete modelling. * What control property?
47 2.3 Nonharmonic Fourier series and remedies to the divergence of controls. WHAT IS THE REMEDY? To filter the high frequencies, i.e. keep only the components of the solution corresponding to indexes: k δ/h with 0 < δ < 1.
48 Filtering restablishes the gap condition, then waves propagate with a speed which is uniform with respect to h and the observability inequality becomes uniform too. λ h ( k λ h πδ k 1 π cos 2 ) > 0, for k δh 1. This can be done rigorously with the aid of:
49 Ingham s Theorem. (1936) Let {µ k } k Z be a sequence of real numbers such that µ k+1 µ k γ > 0, k Z. Then, for any T > 2π/γ there exists C(T, γ) > 0 such that 1 C(T, γ) k Z a k 2 T 0 k Z a k e iµ kt for all sequences of complex numbers {a k } l 2. 2 dt C(T, γ) k Z a k 2
50 CONCLUSION. Given any T > 2, choose 0 < δ < 1 such that ( ) πδ T > 2/ cos or δ > 2 arccos(2/t ). 2 π The choice of 0 < δ < 1 is obviously possible since 2/T < 1. Then, we can control UNIFORMLY ON h the solution PARTIALLY: and π δ/h (y(t ), y t (T )) = 0
51 In the limit the whole solution vanishes: y(t ) = y t (T ) = 0. This is due to the fact the projection operator π δ/h tends to the identity as h 0.
52 Plot of the initial datum to be controlled for the string occupying the space interval 0 < x < 1. Plot of the time evolution of the exact control for the wave equation in time T = 4.


53 Without filtering, the control diverges as h 0.
54 With appropriate filtering the control converges as h 0.
55 These filtered controls can be computed by minimizing the functional J h leading to the controls in the subspace of filtered solutions of the adjoint system. The filtering guarantees the uniform observability. Accordingly the functionals J h are uniformly coercive over those subspaces. In this way, the functionals J h, when restricted to these classes of filtered solutions, Γ-converge to the functional J associated to the control of the wave equation. This is so, since, the filtering condition k δ/h
56 when h 0, ends up covering the whole range of frequencies. Obviously, when minimizing J h over the class of filtered solutions, we only recover partial information on the projections of the controlled states. Indeed, in the Euler-Lagrange equations associated to the minimizers, we do not recover any information on the frequencies that have been cut-off.
57 2.4 The two-grid algorithm in 1-d ULTIMATE GOAL: To develop a class of numerical schemes (new or not) for which the convergence of controls might be guaranteed a priori with minimal computational cost. The most natural approaches (finite differences and FINITE ELE- MENTS) do not work and they have to be complemented with other strategies: * filtering of high frequencies, * mixed finite elements, * multi-grid algorithms, * wavelets, * numerical viscosity,...
58 MIXED FINITE ELEMENTS Square roots of the eigenvalues both in the continuous and in the discrete case with mixed finite elements. The gap of the discrete problem is uniform with respect to j and h and, in fact, it tends to infinity for the highest frequencies as h 0.
59 The MFE can be obtained writing the wave equation as a system of two first oprder transport equations with unknowns ϕ and ϕ t. Taking into account that the regularity of ϕ is H 1 and that of ϕ t is L 2, it is natural to consider two different bases for approximating each component. Namely, P 1 pieciwise linear and continuous elements for ϕ and P 0 piecewise constant elements for ϕ t. In this way the scheme we get, when written in finite difference notation, reads, 1 4 ϕ j ϕ j ϕ j+1 = 1 [ ] ϕj 1 h 2 2ϕ j + ϕ j+1. The dispersion diagram corresponding to this scheme is as above. It is an interesting open problem to analyze the dispersion properties of the various possible MFE in the multi-dimensional case.
60 TWO-GRID ALGORITHM (R. Glowinski, M. Asch-G. Lebeau, M. Negreanu,...) High frequencies producing lack of gap and spurious numerical solutions correspond to large eigenvalues λ h N 2/h. When considering a coarser mesh h ah, λ ah N/2 1/h. Embedding data of a coarse grid 2h into the computational one of size h produces the same effect as filtering with parameter 1/2.
61 All solutions on the coarse mesh when projected to the fine one are no longer pathological. TWO GRIDS FILTERING WITH PARAMETER δ = 1/2.
62 The multiplier method allows analyzing the two-grid method easily: The multiplier xϕ x for the wave equation yields: 1 T E(0) + xϕ xϕ t dx T 0 0 = 1 2 and this implies, as needed, T 0 ϕ x(1, t) 2 dt. (T 2)E(0) 1 2 ϕ x(1, t) 2 dt. 0 The multiplier j(ϕ j+1 ϕ j 1 ) for the discrete wave equation gives: T E h (0) + X h (t) T 0 = 1 2 T 0 ϕ N (t) h T 2 dt+ h 2 N j=0 T 0 ϕ j ϕ j+1 2 dt,
63 Note that h 2 N j=0 T 0 ϕ j ϕ j+1 2 dt h2 2 T ϕ xt 2 dxdt. Filtering is needed to absorb this higher order term: For 1 j δn h 2 with 0 < γ(δ) < 1. N j=0 T 0 ϕ j ϕ j+1 2 dt γ(δ)t E(0), In this way one may recover the same results as above in an alternate way, without using Ingham s inequality and Fourier series.
64 Solutions on the fine grid of size h corresponding to slowly oscillating data given in the coarse mesh (2h) are no longer pathological: ϕ = ϕ l + ϕ h, ϕ l = (N 1)/2 k=1 c k w k, ϕ h = (N 1)/2 k=1 c k λ k λ N+1 k w N+1 k, ϕ h ϕ l.
65 This allows estimating the reminder term in the discrete multiplier identity and obtain the observability inequality. The two-grid filtering is easier to implement than the Fourier one since it can be fully implemented in the physical space.
66 Proofs: 1 d M. Negreanu & E. Z., The two-grid algorithm converges for control times T > 4. Multipliers techniques. M. Mehrenberger & P. Loreti, Same result for T > 2 2 using new versions of Ingham inequalities. M. NEGREANU & E. Z. Convergence of a multigrid method for the controllability of a 1-d wave equation. C. R. Acad. Sci. Paris, 338 (4) (2004),
67 SUMMARY: The most natural numerical methods for computing the controls diverge. Filtering of the high frequencies is needed. This may be done on the Fourier series expansion or on the physical space by a two-grid algorithm. Convergence of the controls is guaranteed by minimizing the discrete functional J h over the class of slowly oscillating data. This produces a relaxation of the control requirement: only the projection of the discrete state over the coarse mesh vanishes.
68 2.5 Links with the dynamical properties of bicharacteristic rays. In several space dimensions, the region in which the observation/control applies needs to be large enough to capture all rays of Geometric Optics. This is the so-called Geometric Control Condition introduced by Ralston (1982) and Bardos-Lebeau-Rauch (1992). Let Ω be a bounded domain of R n, n 1, with boundary Γ of class C 2. Let Γ 0 be an open and non-empty subset of Γ and T > 0. y tt y = 0 in Q = Ω (0, T ) y =v(x, t)1 Γ0 on Σ = Γ (0, T ) (x, 0) = y 0 (x), y t (x, 0) = y 1 (x) in Ω.
69 In all cases the control is equivalent to an observation problem for the adjoint wave equation: Is it true that: ϕ tt ϕ = 0 in Q = Ω (0, T ) ϕ = 0 on Σ = Γ (0, T ) ϕ(x, 0) = ϕ 0 (x), ϕ t (x, 0) = ϕ 1 (x) in Ω. E 0 C(Γ 0, T ) T 0 Γ 0 ϕ 2 dσdt? n And a sharp discussion of this inequality requires of Microlocal analysis. Partial results may be obtained by means of multipliers: x ϕ, ϕ t, ϕ,...
70 THE 5-POINT FINITE-DIFFERENCE SCHEME ϕ j,k 1 h 2 [ ϕj+1,k + ϕ j 1,k 4ϕ j,k + ϕ j,k+1 + ϕ j,k 1 ] = 0. The energy of solutions is constant in time: E h (t) = h2 2 + N N j=0 k=0 [ ϕ jk (t) 2 ϕ j+1,k (t) ϕ j,k (t) h 2 + ϕ j,k+1 (t) ϕ j,k (t) h 2. Without filtering observability inequalities fail in this case too.
71 Understanding how filtering should be used requires of a microlocal analysis of the propagation of numerical waves combining von Neumann analysis and Wigner measures developments (N. Trefethen, P. Gérard, P. L. Lions & Th. Paul, G. Lebeau, F. Macià,...). The von Neumann analysis. Symbol of the semi-discrete system for solutions of wavelength h p h (ξ, τ) = τ 2 4 ( sin 2 (ξ 1 /2) + sin 2 (ξ 2 /2) ), versus p(ξ, τ) = τ 2 [ ξ ξ 2 2 ]. Compare with the symbol of the continuous wave equation: p(ξ, τ) = τ 2 [ ξ ξ 2 2 ].
72 Both symbols coincide for (ξ 1, ξ 2 ) (0, 0). The bicharacteristic rays for the semi-discrete system are as follows: x j (s) = 2sin(ξ j/2)cos(ξ j /2) = sin(ξ j ), j = 1, 2 t (s) = τ ξ j (s) = 0, j = 1, 2 τ (s) = 0. The projection into the physical space is: x j (t) = sin(ξ j) t + x j,0. τ Solving the bicharacteristic flow we get the discrete rays: x j (t) = sin(ξ j) t + x j,0, τ (versus x j (t) = ξ j τ t + x j,0.)
73 BOTH ARE STRAIGHT LINES. BUT! For the continous wave equation all rays propagate with velocity identically equation one. Indeed, the velocity of propagation of the ray is independent of direction: Indeed, [ ξ 1 τ 2 + ξ 2 τ x j (t) = ξ j τ t + x j,0, x (t) 1. 2 ] 1/2 = 1 τ 2 ξ 2 = 0 p(ξ, τ) = 0.
74 This is equivalent to the fact that (τ, ξ) lies in the characteristic manifold. But for the semi-discrete system the velocity is x (t) sin(ξ 1 ) τ 2 + sin(ξ 2 ) τ 2 1/2 in the fol- THE VELOCITY OF PROPAGATION VANISHES!!!!!!! lowing eight points ξ 1 = 0, ±π, ξ 2 = 0, ±π, (ξ 1, ξ 2 ) (0, 0). Therefore, in order to guarantee a uniform velolicity of propagation of waves of wavelength h one has to filter or cut-off all the Fourier components on neighborhoods of those critical points.

75 The red areas stand for those that need to be filtered out in order to guarantee a uniform velocity of propagation in the semi-discrete models.
76
77 Once this is done, one guarantees a uniform velocity of propagation of numerical waves but, in order to achieve observability or controllability properties one still needs to impose a Geometric Control Condition. As filtering becomes stronger, the time of control of the numerical scheme will get closer and closer to that of the continuous wave equation. Once this is understood the 1-d results can be extended. One can then prove that, under filtering, for a suitable choice of the time interval, numerical controls converge to the real control!
78 Filtering can be performed by cutting-off the Fourier expansion of solutions. But the two-grid algorithm provides an alternate way of doing this within the physical space.
79 2.6 The two-grid algorithm in the multi-dimensional case. L. Ignat & E. Z., 2006 Theorem 1 Let Ω be the square and consider controls on all its boundary or on two consecutive sides. Then, the two-grid algorithm with mesh-ratio 1/4 converges for T sufficiently large. The proof uses: Previous results on the control of the solutions under Fourier filtering (E. Z. JMPA, 99 )
80 Fourier analysis showing that the total energy of the slowly oscillating discrete functions can be bounded above in terms of the low frequency components. A diadic decomposition argument following the level sets of the discrete symbol.
81 Grids: h & 4h
82 Low frequency subset concentrating the energy of solutions.

83 Why not using ratio 1/2 for the two-grids? The relevant zone of frequencies intersects a level set of the phase velocity for which the group velocity vanishes at some critical points.
84 CONCLUSIONS: CONTROL AND NUMERICS DO NOT COMMUTE FOURIER FILTERING, MULTI-GRID METHODS ARE GOOD REMEDIES IN SIMPLE SITUATIONS: CONSTANT COEFFI- CIENTS, REGULAR MESHES. MUCH REMAINS TO BE DONE TO HAVE A COMPLETE THEORY AND TO HANDLE MORE COMPLEX SYSTEMS. BUT ALL THE PATHOLOGIES WE HAVE DESCRIBED WILL NECESSARILY ARISE IN THOSE SITUATIONS TOO.
85 THE MATHEMATICAL THEORY NEEDS TO COMBINE TOOLS FROM PARTIAL DIFFERENTIAL EQUATIONS, CONTROL THE- ORY, CLASSICAL NUMERICAL ANALYSIS AND MICROLO- CAL ANALYSIS. OPEN PROBLEMS Complex geometries, variable and irregular coefficients, irregular meshes, the system of elasticity, nonlinear state equations,...

86
87 2.7 Links with waves in heterogenous media WELL KNOWN PHENOMENA FOR WAVES IN HIGHLY OSCILLA- TORY MEDIA
88 ϕ tt (α(x)ϕ x ) x = 0. The observability constant blows-up in the context of homogenization α = α(x/ε) as ε 0; Note the analogy between the homogenization and the discrete models: A h A ε ϕ tt + A h ϕ = 0 ϕ tt + A ε ϕ = 0 Observability fails for some coefficients α in C 0,α (BV is a sharp assumption). This also excludes Strichartz-like dispersive estimates (F. Colombini, S. Spagnolo (1989),...).
89 Pathologies are due to the existence of eigenfunctions which are highly concentrated inside the domain, with an exponentially small queu over the boundary: ϕ = e i λt w(x). F. Colombini & S. Spagnolo, Ann. Sci. ENS, 1989 M. Avellaneda, C. Bardos & J. Rauch, Asymptotic Analysis, C. Castro & E. Z. Archive Rational Mechanics and Analysis, 2002 & C. CASTRO & E. Z. Concentration and lack of observability of waves in highly heterogeneous media. Archive Rational Mechanics and Analysis, 164 (1) (2002), 39-72, & Addendum ARMA; 2006.
90 Obtaining sharp regularity estimates for coeffficients in the multidimensional case is a widely open subject. It is closely related to the topic of Strichartz inequalities. In fact the pathological examples for the lack of observability are such that there exist families of highly concentrated eigenfunctions that provide also counterexamples to dispersion.
91 2.8 Stabilization The same tools that have been developed to prove observability inequalities for wave equations (Fourier series, multipliers, Carleman inequalities, microlocal Analysis) can be applied to deal with the problem of stabilization: To produce the uniform exponential decay property in time by means of feedback (closed-loop controllers) mechanisms that are localized in the same subsets where controls are applied. Boundary stabilization of the wave equation Let Ω be a bounded domain of R n, n 1, with boundary Γ of class
92 C 2 and Γ 0 be an open and non-empty subset of Γ. y tt y = 0 in Q = Ω (0, ) y = 0 on Σ 1 = (Γ \ Γ 0 ) (0, ) y ν = y t on Σ 0 = Γ 0 (0, ) y(x, 0) = y 0 (x), y t (x, 0) = y 1 (x) in Ω. The energy is then of the form E(t) = 1 ] [ y t 2 + y 2 dx 2 Ω and satisfies the energy dissipation law de(t) dt = Γ 0 y t 2 dγ.
93 Internal stabilization. Let ω be an open subset of Ω. Consider: y tt y = y t 1 ω in Q = Ω (0, ) y = 0 on Σ = Γ (0, ) y(x, 0) = y 0 (x), y t (x, 0) = y 1 (x) in Ω, where 1 ω stands for the characteristic function of the subset ω. The energy dissipation law is then de(t) dt = ω y t 2 dx. Question: Do they exist C > 0 and γ > 0 such that E(t) Ce γt E(0), t 0, for all solution of the dissipative system?
94 The answer to the problem is roughly the same as for observability and control. Stabilization holds iff the GCC is satisfied. What about numerical schemes? The same pathologies we have described at the level of observability and control arise in this context too and are an obstacle for the decay rate to be uniform on the mesh-size parameter h.
95 Numerical viscosity L. R. Tcheugoue-Tebou, E. Z., Consider the viscous numerical approximation scheme: y j 1 h 2 [ yj+1 + y j 1 2y j ] [ y j+1 + y j 1 2y j] + aj 1 ωh y j = 0. This is the semi-discrete analog of y tt y h 2 y t + a(x)1 ω y t = 0. L. R. TCHEUGOUE & E. Z. Uniform exponential long time decay for the space semi-discretizations of a damped wave equation with artificial numerical viscosity. Numerische Mathematik, 95 (3) (2003), & Uniform boundary stabilization of the finite difference space discretization of the 1 d wave equation. Advances in Computational Mathematics, to appear.
96 The energy dissipation law is this time: de h (t) dt = h j ω h a j y j 2 h 3 N j=0 y j+1 y j 2 h 2. The right hand side terms reproduce the effect of the two damping terms in this scheme: The velocity damping, discrete version of a(x)y t ; The added viscous damping that efficiently dissipates the high frequency spurious oscillations.
97 Theorem: THE DECAY RATE OF THIS VISCOUS NUMERICAL SCHEME IS UNIFORMLY, INDEPENDENT OF h. Furthermore, the scheme converges in the classical sense of numerical analysis. Note that this result is optimal in what concerns the amount of viscous damping we use. The same exponential decay rate could be proved by using a viscous term of the form h α y t, with α < 2, but then the order of convergence of the numerical scheme would be smaller (= (h α ). On the other hand, the decay rate would fail to be uniform is less damping were used, i. e. for viscous damping terms of the form h α y t, with α > 2. This result has been later extended in various ways:
98 The 1 d wave equation with boundary damping (L. R. Tcheugoue- Tebou, E. Z. 2003); Multi-dimensional problems (A. Munch-A. Pazoto. ESAIM:COCV, to appear.) More general 1 d problems (with stronger numerical viscosity), M. Tucsnak et al., But a complete theory is to be developed.
99 2.9 Semilinear wave equations One of the most systematic approaches to derive exact controllability results for semilinear PDE consists in combining: A fixed point method; Sharp results on the cost of controlling linear equations perturbed by lower order potentials. In this way it has been proved that the semilinear 1 d wave equation y tt y xx + f(y) = 0 E. Z. Exact controllability for the semilinear wave equation in one space dimension. Ann. IHP. Analyse non linéaire
100 is controllable as the linear one is within the class of nonlinearities growing at infinity as f(s) slog 2 (s). This result is sharp since for nonlinearities that are asymptotically larger blow-up phenomena may occur and, due to the finite velocity of propagation, when blow-up occurs, exact controllability may not hold. What about numerical schemes? Most of the results we have developed are based on Fourier series decompositions that do not suffice to deal with semilinear problems.
101 The two-grid technique seems to be the most convenient one to do it. Consider the conservative finite-difference semi-discretization of the semilinear wave equation as follows: y j + 2y j y j+1 y j 1 h 2 + f(y j ) = 0, j = 1,..., N, 0 < t < T y 0 (t) = 0, y N+1 (t) = v(t), 0 < t < T (1) y j (0) = yj 0, y j (0) = y1 j, j = 0,..., N + 1. The semi-discrete analogue of the exact controllability final condition E. Z., Control and numerical approximation of the wave and heat equations, Proceedings of the ICM Madrid 2006, Vol. III, Invited Lectures, European Mathematical Society Publishing House, M. Sanz-Solé et al. eds., 2006, pp
102 is y j (T ) = z 0 j, y j (T ) = z1 j, j = 0,..., N + 1. (2) But, under the final requirement (2), controls diverge as h 0 even for the linear wave equation. In the two-grid algorithm, the final condition (2) is relaxed to ( ) ( Π h Y (T ) = Πh Z 0 ) (, Π h Y (T ) ) ( = Π h Z 1 ), (3) where Y (t) and Y (t) stand for the vector-valued unknowns Y (t) = ( y 0 (t),..., y N+1 (t) ), Y (t) = ( y 0 (t),..., y N+1 (t)). We shall also use the notation Y h for Y when passing to the limit to better underline the dependence on the parameter h. Π h is the
103 projection operator so that ( ( 1 Π h (G) = g 2j g 2j g 2j+2 )) j=0,..., N+1 2 1, (4) with G = (g 0, g 1,..., g N, g N+1 ). Note that the projection Π h (G) is a vector of dimension (N + 1) / 2. Thus, roughly speaking, the relaxed final requirement (3) only guarantees that half of the state of the numerical scheme is controlled. Despite this fact, the formal limit of (3) as h 0 is still the exact controllability condition on the continuous wave equation.
104 Theorem 2 Assume that the nonlinearity f : R R is such that f is globally Lipschitz. (5) Let T 0 > 0 be such that the two-grid algorithm for the control of the linear wave equation converges for all T > T 0. Then, the algorithm converges for the semilinear system too for all T > T 0. More precisely, for all ( y 0, y 1) H s (0, 1) H s 1 (0, 1) with s > 0, there exists a family of controls {v h } h>0 for the semi-discrete system (1) such that the solutions of (1) satisfy the relaxed controllability condition (3) and v h (t) v(t) in L 2 (0, T ), h 0 ( Yh, Y h) (y, yt ) in L 2( 0, T ; L 2 (0, 1) H 1 (0, 1) )
105 where y is the solution of the semilinear wave equation and v is a control such that the state y satisfies the final requirement. Whether the two-grid algorithm applies under the weaker and sharp growth logarithimic condition is an open problem. The difficulty for doing that is that the two existing proofs allowing to deal with the semilinear wave equation under the weaker growth condition are based, on a way or another, on the sidewise solvability of the wave equation, a property that the semi-discrete scheme fails to have. Here we are able to deal with globally Lipschitz nonlinearities, since, after linearization, they lead to linear equations ith uniformly bounded potentials. in this case a compactness-uniqueness argument suffices to obtain a (non explicit) uniform observability constant.
106 2.10 Schrödinger and plate equations DISPERSION MAY HELP At the continuous level it is well known that dispersion helps. It is well known (G. Lebeau) that, whenever the wave equation is controllable in some time T in some geometric configuration, then the Schrödinger equation is controllable too, but in an arbitrarily small time (infinite speed of propagation). But there are results showing that the Schrödinger and plate equations behave in fact better. Indeed, for instance, in the square, controllability may be achieved by means of controls supported in regions that
107 do not fulfill the GCC requirement (A. Haraux, S. Jaffard, N. Burq, M. Tucsnak,...) It is easy to see that the classical Gaussian beam construction showing that trapped rays are an obstacle for controllability for wave equations, does not yield a counterexample in the Schrödinger setting because of the infinite speed of propagation and the spreading of these beams in infinite time. Consider the Schrödinger or beam and plate equations: iu t = u Schrödinger; u tt = 2 u plate/beam Its semi-discrete versions read: iu t = h u; u tt = 2 h u.
108 Here h denotes the finite-difference approximation of the Laplacian. The Fourier representation reads now as follows: ϕ = N k=1 a k cos ( λ h k t) + b k λ h k sin ( λ h k t) w k h. This time ϕ = k=1 ( a k cos(k 2 π 2 t) + b ) k kπ sin(k2 π 2 t) sin(kπx) λ N (h) λ N 1 (h) =
109 = ( λ N (h) λ N 1 (h))( λ N (h) + λ N 1 (h)) h. 1 h 1. The gap being uniform, we can apply Ingham s inequality. The controllability properties are this time independent of h.
110
111 DISPERSION SUFFICES, BUT ONLY IN 1 D. IN SEVERAL SPACE DIMENSIONS GEOMETRY ENTERS AGAIN! Indeed, we can not recover the same results as for the continuous Schrödinger equation in the continuous setting. The following is an example showing that observability and controllability fail for all time for the semi-discrete Schrödinger equation in the square when the domain of control does not intersect the diagonal.
112 The eigenvector for the 5 point finite-difference scheme for the Laplacian in the square, with eigenvalue λ = 4/h 2, taking values ±1 along a diagonal, alternating sign and vanishing everywhere else in the domain. An interesting open problem: Laplacian. Unique continuation for the discrete
113 A h ϕ = λ ϕ ϕ j = 0, j ω h ϕ 0? The problem arises in a much more general context: general geometries, finite elements, heat and wave equations,... Generally speaking: What is the tool needed to analyze whether the fact that a solution of a discrete or semi-discrete system vanishes in a certain number of nodes, implies that the solution vanishes everywhere?
114 What is the discrete counterpart of Holmgren s Uniqueness Theorem or of Carleman s inequalities?
Control of Waves: Theory and Numerics
 BCAM, October, 2010 Control of Waves: Theory and Numerics Enrique Zuazua BCAM Basque Center for Applied Mathematics E-48160 Derio - Basque Country - Spain zuazua@bcamath.org www.bcamath.org/zuazua THE
BCAM, October, 2010 Control of Waves: Theory and Numerics Enrique Zuazua BCAM Basque Center for Applied Mathematics E-48160 Derio - Basque Country - Spain zuazua@bcamath.org www.bcamath.org/zuazua THE
Optimal and Approximate Control of Finite-Difference Approximation Schemes for the 1D Wave Equation
 Optimal and Approximate Control of Finite-Difference Approximation Schemes for the 1D Wave Equation May 21, 2004 Enrique Zuazua 1 Departmento de Matemáticas Universidad Autónoma 28049 Madrid, Spain enrique.zuazua@uam.es
Optimal and Approximate Control of Finite-Difference Approximation Schemes for the 1D Wave Equation May 21, 2004 Enrique Zuazua 1 Departmento de Matemáticas Universidad Autónoma 28049 Madrid, Spain enrique.zuazua@uam.es
Control, Stabilization and Numerics for Partial Differential Equations
 Paris-Sud, Orsay, December 06 Control, Stabilization and Numerics for Partial Differential Equations Enrique Zuazua Universidad Autónoma 28049 Madrid, Spain enrique.zuazua@uam.es http://www.uam.es/enrique.zuazua
Paris-Sud, Orsay, December 06 Control, Stabilization and Numerics for Partial Differential Equations Enrique Zuazua Universidad Autónoma 28049 Madrid, Spain enrique.zuazua@uam.es http://www.uam.es/enrique.zuazua
Asymptotic Behavior of a Hyperbolic-parabolic Coupled System Arising in Fluid-structure Interaction
 International Series of Numerical Mathematics, Vol. 154, 445 455 c 2006 Birkhäuser Verlag Basel/Switzerland Asymptotic Behavior of a Hyperbolic-parabolic Coupled System Arising in Fluid-structure Interaction
International Series of Numerical Mathematics, Vol. 154, 445 455 c 2006 Birkhäuser Verlag Basel/Switzerland Asymptotic Behavior of a Hyperbolic-parabolic Coupled System Arising in Fluid-structure Interaction
Dispersive numerical schemes for Schrödinger equations
 Dispersive numerical schemes for Schrödinger equations Enrique Zuazua joint work with L. Ignat zuazua@bcamath.org Basque Center for Applied Mathematics (BCAM), Bilbao, Basque Country, Spain IMA Workshop:
Dispersive numerical schemes for Schrödinger equations Enrique Zuazua joint work with L. Ignat zuazua@bcamath.org Basque Center for Applied Mathematics (BCAM), Bilbao, Basque Country, Spain IMA Workshop:
The heat equation. Paris-Sud, Orsay, December 06
 Paris-Sud, Orsay, December 06 The heat equation Enrique Zuazua Universidad Autónoma 28049 Madrid, Spain enrique.zuazua@uam.es http://www.uam.es/enrique.zuazua Plan: 3.- The heat equation: 3.1 Preliminaries
Paris-Sud, Orsay, December 06 The heat equation Enrique Zuazua Universidad Autónoma 28049 Madrid, Spain enrique.zuazua@uam.es http://www.uam.es/enrique.zuazua Plan: 3.- The heat equation: 3.1 Preliminaries
Wave propagation in discrete heterogeneous media
 www.bcamath.org Wave propagation in discrete heterogeneous media Aurora MARICA marica@bcamath.org BCAM - Basque Center for Applied Mathematics Derio, Basque Country, Spain Summer school & workshop: PDEs,
www.bcamath.org Wave propagation in discrete heterogeneous media Aurora MARICA marica@bcamath.org BCAM - Basque Center for Applied Mathematics Derio, Basque Country, Spain Summer school & workshop: PDEs,
Hilbert Uniqueness Method and regularity
 Hilbert Uniqueness Method and regularity Sylvain Ervedoza 1 Joint work with Enrique Zuazua 2 1 Institut de Mathématiques de Toulouse & CNRS 2 Basque Center for Applied Mathematics Institut Henri Poincaré
Hilbert Uniqueness Method and regularity Sylvain Ervedoza 1 Joint work with Enrique Zuazua 2 1 Institut de Mathématiques de Toulouse & CNRS 2 Basque Center for Applied Mathematics Institut Henri Poincaré
Switching, sparse and averaged control
 Switching, sparse and averaged control Enrique Zuazua Ikerbasque & BCAM Basque Center for Applied Mathematics Bilbao - Basque Country- Spain zuazua@bcamath.org http://www.bcamath.org/zuazua/ WG-BCAM, February
Switching, sparse and averaged control Enrique Zuazua Ikerbasque & BCAM Basque Center for Applied Mathematics Bilbao - Basque Country- Spain zuazua@bcamath.org http://www.bcamath.org/zuazua/ WG-BCAM, February
On the numerical approximation of the Helmholtz equation
 On the numerical approximation of the Helmholtz equation Enrique Zuazua Departamento de Matemáticas Universidad Autónoma de Madrid 28049 Madrid. enrique.zuazua@uam.es Dedicado a Luiz Adauto Medeiros con
On the numerical approximation of the Helmholtz equation Enrique Zuazua Departamento de Matemáticas Universidad Autónoma de Madrid 28049 Madrid. enrique.zuazua@uam.es Dedicado a Luiz Adauto Medeiros con
The effect of Group Velocity in the numerical analysis of control problems for the wave equation
 The effect of Group Velocity in the numerical analysis of control problems for the wave equation Fabricio Macià École Normale Supérieure, D.M.A., 45 rue d Ulm, 753 Paris cedex 5, France. Abstract. In this
The effect of Group Velocity in the numerical analysis of control problems for the wave equation Fabricio Macià École Normale Supérieure, D.M.A., 45 rue d Ulm, 753 Paris cedex 5, France. Abstract. In this
The Wave Equation: Control and Numerics
 The Wave Equation: Control and Numerics Sylvain Ervedoza and Enrique Zuazua Abstract In these Notes we make a self-contained presentation of the theory that has been developed recently for the numerical
The Wave Equation: Control and Numerics Sylvain Ervedoza and Enrique Zuazua Abstract In these Notes we make a self-contained presentation of the theory that has been developed recently for the numerical
Dispersive numerical schemes for linear and nonlinear Schrödinger equations
 Collège de France, December 2006 Dispersive numerical schemes for linear and nonlinear Schrödinger equations Enrique Zuazua Universidad Autónoma, 28049 Madrid, Spain enrique.zuazua@uam.es http://www.uam.es/enrique.zuazua
Collège de France, December 2006 Dispersive numerical schemes for linear and nonlinear Schrödinger equations Enrique Zuazua Universidad Autónoma, 28049 Madrid, Spain enrique.zuazua@uam.es http://www.uam.es/enrique.zuazua
Numerics for the Control of Partial Differential
 Springer-Verlag Berlin Heidelberg 2015 Björn Engquist Encyclopedia of Applied and Computational Mathematics 10.1007/978-3-540-70529-1_362 Numerics for the Control of Partial Differential Equations Enrique
Springer-Verlag Berlin Heidelberg 2015 Björn Engquist Encyclopedia of Applied and Computational Mathematics 10.1007/978-3-540-70529-1_362 Numerics for the Control of Partial Differential Equations Enrique
Controllability of linear PDEs (I): The wave equation
: The wave equation") Controllability of linear PDEs (I): The wave equation M. González-Burgos IMUS, Universidad de Sevilla Doc Course, Course 2, Sevilla, 2018 Contents 1 Introduction. Statement of the problem 2 Distributed
Controllability of linear PDEs (I): The wave equation M. González-Burgos IMUS, Universidad de Sevilla Doc Course, Course 2, Sevilla, 2018 Contents 1 Introduction. Statement of the problem 2 Distributed
A remark on the observability of conservative linear systems
 A remark on the observability of conservative linear systems Enrique Zuazua Abstract. We consider abstract conservative evolution equations of the form ż = Az, where A is a skew-adjoint operator. We analyze
A remark on the observability of conservative linear systems Enrique Zuazua Abstract. We consider abstract conservative evolution equations of the form ż = Az, where A is a skew-adjoint operator. We analyze
Null-controllability of the heat equation in unbounded domains
 Chapter 1 Null-controllability of the heat equation in unbounded domains Sorin Micu Facultatea de Matematică-Informatică, Universitatea din Craiova Al. I. Cuza 13, Craiova, 1100 Romania sd micu@yahoo.com
Chapter 1 Null-controllability of the heat equation in unbounded domains Sorin Micu Facultatea de Matematică-Informatică, Universitatea din Craiova Al. I. Cuza 13, Craiova, 1100 Romania sd micu@yahoo.com
Waves: propagation, dispersion and numerical simulation
 ENUMATH, Santiago de Compostela, July 2005 Waves: propagation, dispersion and numerical simulation Enrique Zuazua Universidad Autónoma, 28049 Madrid, Spain enrique.zuazua@uam.es http://www.uam.es/enrique.zuazua
ENUMATH, Santiago de Compostela, July 2005 Waves: propagation, dispersion and numerical simulation Enrique Zuazua Universidad Autónoma, 28049 Madrid, Spain enrique.zuazua@uam.es http://www.uam.es/enrique.zuazua
Historical Introduction to Mathematical Control Theory
 November 05 Introducción histórica a la Teoría Matemática del Control Historical Introduction to Mathematical Control Theory Enrique Zuazua Universidad Autónoma 28049 Madrid, Spain enrique.zuazua@uam.es
November 05 Introducción histórica a la Teoría Matemática del Control Historical Introduction to Mathematical Control Theory Enrique Zuazua Universidad Autónoma 28049 Madrid, Spain enrique.zuazua@uam.es
The PML Method: Continuous and Semidiscrete Waves.
 Intro Continuous Model. Finite difference. Remedies. The PML Method: Continuous and Semidiscrete Waves. 1 Enrique Zuazua 2 1 Laboratoire de Mathématiques de Versailles. 2 Universidad Autónoma, Madrid.
Intro Continuous Model. Finite difference. Remedies. The PML Method: Continuous and Semidiscrete Waves. 1 Enrique Zuazua 2 1 Laboratoire de Mathématiques de Versailles. 2 Universidad Autónoma, Madrid.
Wave operators with non-lipschitz coefficients: energy and observability estimates
 Wave operators with non-lipschitz coefficients: energy and observability estimates Institut de Mathématiques de Jussieu-Paris Rive Gauche UNIVERSITÉ PARIS DIDEROT PARIS 7 JOURNÉE JEUNES CONTRÔLEURS 2014
Wave operators with non-lipschitz coefficients: energy and observability estimates Institut de Mathématiques de Jussieu-Paris Rive Gauche UNIVERSITÉ PARIS DIDEROT PARIS 7 JOURNÉE JEUNES CONTRÔLEURS 2014
Optimal shape and location of sensors. actuators in PDE models
 Modeling Optimal shape and location of sensors or actuators in PDE models Emmanuel Tre lat1 1 Sorbonne Universite (Paris 6), Laboratoire J.-L. Lions Fondation Sciences Mathe matiques de Paris Works with
Modeling Optimal shape and location of sensors or actuators in PDE models Emmanuel Tre lat1 1 Sorbonne Universite (Paris 6), Laboratoire J.-L. Lions Fondation Sciences Mathe matiques de Paris Works with
Optimal shape and location of sensors or actuators in PDE models
 Optimal shape and location of sensors or actuators in PDE models Y. Privat, E. Trélat 1, E. Zuazua 1 Univ. Paris 6 (Labo. J.-L. Lions) et Institut Universitaire de France SIAM Conference on Analysis of
Optimal shape and location of sensors or actuators in PDE models Y. Privat, E. Trélat 1, E. Zuazua 1 Univ. Paris 6 (Labo. J.-L. Lions) et Institut Universitaire de France SIAM Conference on Analysis of
Some new results related to the null controllability of the 1 d heat equation
 Some new results related to the null controllability of the 1 d heat equation Antonio LÓPEZ and Enrique ZUAZUA Departamento de Matemática Aplicada Universidad Complutense 284 Madrid. Spain bantonio@sunma4.mat.ucm.es
Some new results related to the null controllability of the 1 d heat equation Antonio LÓPEZ and Enrique ZUAZUA Departamento de Matemática Aplicada Universidad Complutense 284 Madrid. Spain bantonio@sunma4.mat.ucm.es
Optimal shape and placement of actuators or sensors for PDE models
 Optimal shape and placement of actuators or sensors for PDE models Y. Privat, E. Trélat, E. uazua Univ. Paris 6 (Labo. J.-L. Lions) et Institut Universitaire de France Rutgers University - Camden, March
Optimal shape and placement of actuators or sensors for PDE models Y. Privat, E. Trélat, E. uazua Univ. Paris 6 (Labo. J.-L. Lions) et Institut Universitaire de France Rutgers University - Camden, March
Dispersive numerical schemes for Schrödinger equations
 Dispersive numerical schemes for Schrödinger equations Enrique Zuazua joint work with L. Ignat & A. Marica zuazua@bcamath.org Basque Center for Applied Mathematics (BCAM), Bilbao, Basque Country, Spain
Dispersive numerical schemes for Schrödinger equations Enrique Zuazua joint work with L. Ignat & A. Marica zuazua@bcamath.org Basque Center for Applied Mathematics (BCAM), Bilbao, Basque Country, Spain
Heat equations with singular potentials: Hardy & Carleman inequalities, well-posedness & control
 Outline Heat equations with singular potentials: Hardy & Carleman inequalities, well-posedness & control IMDEA-Matemáticas & Universidad Autónoma de Madrid Spain enrique.zuazua@uam.es Analysis and control
Outline Heat equations with singular potentials: Hardy & Carleman inequalities, well-posedness & control IMDEA-Matemáticas & Universidad Autónoma de Madrid Spain enrique.zuazua@uam.es Analysis and control
Stabilization of the wave equation with localized Kelvin-Voigt damping
 Stabilization of the wave equation with localized Kelvin-Voigt damping Louis Tebou Florida International University Miami SEARCDE University of Memphis October 11-12, 2014 Louis Tebou (FIU, Miami) Stabilization...
Stabilization of the wave equation with localized Kelvin-Voigt damping Louis Tebou Florida International University Miami SEARCDE University of Memphis October 11-12, 2014 Louis Tebou (FIU, Miami) Stabilization...
Nonlinear stabilization via a linear observability
 via a linear observability Kaïs Ammari Department of Mathematics University of Monastir Joint work with Fathia Alabau-Boussouira Collocated feedback stabilization Outline 1 Introduction and main result
via a linear observability Kaïs Ammari Department of Mathematics University of Monastir Joint work with Fathia Alabau-Boussouira Collocated feedback stabilization Outline 1 Introduction and main result
Hybrid systems of PDE s arising in fluid-structure interaction and multi-structures
 UIMP, Santander, July 04 Hybrid systems of PDE s arising in fluid-structure interaction and multi-structures Enrique Zuazua Universidad Autónoma 28049 Madrid, Spain enrique.zuazua@uam.es The goal of this
UIMP, Santander, July 04 Hybrid systems of PDE s arising in fluid-structure interaction and multi-structures Enrique Zuazua Universidad Autónoma 28049 Madrid, Spain enrique.zuazua@uam.es The goal of this
Spectrum and Exact Controllability of a Hybrid System of Elasticity.
 Spectrum and Exact Controllability of a Hybrid System of Elasticity. D. Mercier, January 16, 28 Abstract We consider the exact controllability of a hybrid system consisting of an elastic beam, clamped
Spectrum and Exact Controllability of a Hybrid System of Elasticity. D. Mercier, January 16, 28 Abstract We consider the exact controllability of a hybrid system consisting of an elastic beam, clamped
Inégalités spectrales pour le contrôle des EDP linéaires : groupe de Schrödinger contre semigroupe de la chaleur.
 Inégalités spectrales pour le contrôle des EDP linéaires : groupe de Schrödinger contre semigroupe de la chaleur. Luc Miller Université Paris Ouest Nanterre La Défense, France Pde s, Dispersion, Scattering
Inégalités spectrales pour le contrôle des EDP linéaires : groupe de Schrödinger contre semigroupe de la chaleur. Luc Miller Université Paris Ouest Nanterre La Défense, France Pde s, Dispersion, Scattering
Strichartz Estimates in Domains
 Department of Mathematics Johns Hopkins University April 15, 2010 Wave equation on Riemannian manifold (M, g) Cauchy problem: 2 t u(t, x) gu(t, x) =0 u(0, x) =f (x), t u(0, x) =g(x) Strichartz estimates:
Department of Mathematics Johns Hopkins University April 15, 2010 Wave equation on Riemannian manifold (M, g) Cauchy problem: 2 t u(t, x) gu(t, x) =0 u(0, x) =f (x), t u(0, x) =g(x) Strichartz estimates:
Numerical control of waves
 Numerical control of waves Convergence issues and some applications Mark Asch U. Amiens, LAMFA UMR-CNRS 7352 June 15th, 2012 Mark Asch (GT Contrôle, LJLL, Parris-VI) Numerical control of waves June 15th,
Numerical control of waves Convergence issues and some applications Mark Asch U. Amiens, LAMFA UMR-CNRS 7352 June 15th, 2012 Mark Asch (GT Contrôle, LJLL, Parris-VI) Numerical control of waves June 15th,
Greedy Control. Enrique Zuazua 1 2
 Greedy Control Enrique Zuazua 1 2 DeustoTech - Bilbao, Basque Country, Spain Universidad Autónoma de Madrid, Spain Visiting Fellow of LJLL-UPMC, Paris enrique.zuazua@deusto.es http://enzuazua.net X ENAMA,
Greedy Control Enrique Zuazua 1 2 DeustoTech - Bilbao, Basque Country, Spain Universidad Autónoma de Madrid, Spain Visiting Fellow of LJLL-UPMC, Paris enrique.zuazua@deusto.es http://enzuazua.net X ENAMA,
Evolution problems involving the fractional Laplace operator: HUM control and Fourier analysis
 Evolution problems involving the fractional Laplace operator: HUM control and Fourier analysis Umberto Biccari joint work with Enrique Zuazua BCAM - Basque Center for Applied Mathematics NUMERIWAVES group
Evolution problems involving the fractional Laplace operator: HUM control and Fourier analysis Umberto Biccari joint work with Enrique Zuazua BCAM - Basque Center for Applied Mathematics NUMERIWAVES group
Qualitative Properties of Numerical Approximations of the Heat Equation
 Qualitative Properties of Numerical Approximations of the Heat Equation Liviu Ignat Universidad Autónoma de Madrid, Spain Santiago de Compostela, 21 July 2005 The Heat Equation { ut u = 0 x R, t > 0, u(0,
Qualitative Properties of Numerical Approximations of the Heat Equation Liviu Ignat Universidad Autónoma de Madrid, Spain Santiago de Compostela, 21 July 2005 The Heat Equation { ut u = 0 x R, t > 0, u(0,
Optimal shape and position of the support for the internal exact control of a string
 Optimal shape and position of the support for the internal exact control of a string Francisco Periago Abstract In this paper, we consider the problem of optimizing the shape and position of the support
Optimal shape and position of the support for the internal exact control of a string Francisco Periago Abstract In this paper, we consider the problem of optimizing the shape and position of the support
Mathematical Control Theory: History and perspectives
 BCAM, June 6, 2011 Mathematical Control Theory: History and perspectives Enrique Zuazua IKERBASQUE & Basque Center for Applied Mathematics http://www.bcamath.org/zuazua/ MATHEMATICAL CONTROL THEORY, or
BCAM, June 6, 2011 Mathematical Control Theory: History and perspectives Enrique Zuazua IKERBASQUE & Basque Center for Applied Mathematics http://www.bcamath.org/zuazua/ MATHEMATICAL CONTROL THEORY, or
Scientific Computing WS 2018/2019. Lecture 15. Jürgen Fuhrmann Lecture 15 Slide 1
 Scientific Computing WS 2018/2019 Lecture 15 Jürgen Fuhrmann juergen.fuhrmann@wias-berlin.de Lecture 15 Slide 1 Lecture 15 Slide 2 Problems with strong formulation Writing the PDE with divergence and gradient
Scientific Computing WS 2018/2019 Lecture 15 Jürgen Fuhrmann juergen.fuhrmann@wias-berlin.de Lecture 15 Slide 1 Lecture 15 Slide 2 Problems with strong formulation Writing the PDE with divergence and gradient
Research achievements : Enrique Zuazua
 Research achievements : Enrique Zuazua Overall, my field of expertise covers various aspects of Applied Mathematics including Partial Differential Equations (PDE), Optimal Design, Systems Control and Numerical
Research achievements : Enrique Zuazua Overall, my field of expertise covers various aspects of Applied Mathematics including Partial Differential Equations (PDE), Optimal Design, Systems Control and Numerical
Decay rates for partially dissipative hyperbolic systems
 Outline Decay rates for partially dissipative hyperbolic systems Basque Center for Applied Mathematics Bilbao, Basque Country, Spain zuazua@bcamath.org http://www.bcamath.org/zuazua/ Numerical Methods
Outline Decay rates for partially dissipative hyperbolic systems Basque Center for Applied Mathematics Bilbao, Basque Country, Spain zuazua@bcamath.org http://www.bcamath.org/zuazua/ Numerical Methods
Long Time Behavior of a Coupled Heat-Wave System Arising in Fluid-Structure Interaction
 ARMA manuscript No. (will be inserted by the editor) Long Time Behavior of a Coupled Heat-Wave System Arising in Fluid-Structure Interaction Xu Zhang, Enrique Zuazua Contents 1. Introduction..................................
ARMA manuscript No. (will be inserted by the editor) Long Time Behavior of a Coupled Heat-Wave System Arising in Fluid-Structure Interaction Xu Zhang, Enrique Zuazua Contents 1. Introduction..................................
A sufficient condition for observability of waves by measurable subsets
 A sufficient condition for observability of waves by measurable subsets Emmanuel Humbert Yannick Privat Emmanuel Trélat Abstract We consider the wave equation on a closed Riemannian manifold (M, g). Given
A sufficient condition for observability of waves by measurable subsets Emmanuel Humbert Yannick Privat Emmanuel Trélat Abstract We consider the wave equation on a closed Riemannian manifold (M, g). Given
Separation of Variables in Linear PDE: One-Dimensional Problems
 Separation of Variables in Linear PDE: One-Dimensional Problems Now we apply the theory of Hilbert spaces to linear differential equations with partial derivatives (PDE). We start with a particular example,
Separation of Variables in Linear PDE: One-Dimensional Problems Now we apply the theory of Hilbert spaces to linear differential equations with partial derivatives (PDE). We start with a particular example,
Dispersive Equations and Hyperbolic Orbits
 Dispersive Equations and Hyperbolic Orbits H. Christianson Department of Mathematics University of California, Berkeley 4/16/07 The Johns Hopkins University Outline 1 Introduction 3 Applications 2 Main
Dispersive Equations and Hyperbolic Orbits H. Christianson Department of Mathematics University of California, Berkeley 4/16/07 The Johns Hopkins University Outline 1 Introduction 3 Applications 2 Main
arxiv: v3 [math.oc] 19 Apr 2018
![arxiv: v3 [math.oc] 19 Apr 2018](/thumbs/76/74434508.jpg "arxiv: v3 [math.oc] 19 Apr 2018") CONTROLLABILITY UNDER POSITIVITY CONSTRAINTS OF SEMILINEAR HEAT EQUATIONS arxiv:1711.07678v3 [math.oc] 19 Apr 2018 Dario Pighin Departamento de Matemáticas, Universidad Autónoma de Madrid 28049 Madrid,
CONTROLLABILITY UNDER POSITIVITY CONSTRAINTS OF SEMILINEAR HEAT EQUATIONS arxiv:1711.07678v3 [math.oc] 19 Apr 2018 Dario Pighin Departamento de Matemáticas, Universidad Autónoma de Madrid 28049 Madrid,
1 Lyapunov theory of stability
 M.Kawski, APM 581 Diff Equns Intro to Lyapunov theory. November 15, 29 1 1 Lyapunov theory of stability Introduction. Lyapunov s second (or direct) method provides tools for studying (asymptotic) stability
M.Kawski, APM 581 Diff Equns Intro to Lyapunov theory. November 15, 29 1 1 Lyapunov theory of stability Introduction. Lyapunov s second (or direct) method provides tools for studying (asymptotic) stability
On the bang-bang property of time optimal controls for infinite dimensional linear systems
 On the bang-bang property of time optimal controls for infinite dimensional linear systems Marius Tucsnak Université de Lorraine Paris, 6 janvier 2012 Notation and problem statement (I) Notation: X (the
On the bang-bang property of time optimal controls for infinite dimensional linear systems Marius Tucsnak Université de Lorraine Paris, 6 janvier 2012 Notation and problem statement (I) Notation: X (the
2tdt 1 y = t2 + C y = which implies C = 1 and the solution is y = 1
 Lectures - Week 11 General First Order ODEs & Numerical Methods for IVPs In general, nonlinear problems are much more difficult to solve than linear ones. Unfortunately many phenomena exhibit nonlinear
Lectures - Week 11 General First Order ODEs & Numerical Methods for IVPs In general, nonlinear problems are much more difficult to solve than linear ones. Unfortunately many phenomena exhibit nonlinear
The first order quasi-linear PDEs
 Chapter 2 The first order quasi-linear PDEs The first order quasi-linear PDEs have the following general form: F (x, u, Du) = 0, (2.1) where x = (x 1, x 2,, x 3 ) R n, u = u(x), Du is the gradient of u.
Chapter 2 The first order quasi-linear PDEs The first order quasi-linear PDEs have the following general form: F (x, u, Du) = 0, (2.1) where x = (x 1, x 2,, x 3 ) R n, u = u(x), Du is the gradient of u.
Strichartz Estimates for the Schrödinger Equation in Exterior Domains
 Strichartz Estimates for the Schrödinger Equation in University of New Mexico May 14, 2010 Joint work with: Hart Smith (University of Washington) Christopher Sogge (Johns Hopkins University) The Schrödinger
Strichartz Estimates for the Schrödinger Equation in University of New Mexico May 14, 2010 Joint work with: Hart Smith (University of Washington) Christopher Sogge (Johns Hopkins University) The Schrödinger
A COUNTEREXAMPLE TO AN ENDPOINT BILINEAR STRICHARTZ INEQUALITY TERENCE TAO. t L x (R R2 ) f L 2 x (R2 )
 f L 2 x (R2 )") Electronic Journal of Differential Equations, Vol. 2006(2006), No. 5, pp. 6. ISSN: 072-669. URL: http://ejde.math.txstate.edu or http://ejde.math.unt.edu ftp ejde.math.txstate.edu (login: ftp) A COUNTEREXAMPLE
Electronic Journal of Differential Equations, Vol. 2006(2006), No. 5, pp. 6. ISSN: 072-669. URL: http://ejde.math.txstate.edu or http://ejde.math.unt.edu ftp ejde.math.txstate.edu (login: ftp) A COUNTEREXAMPLE
Some recent results on controllability of coupled parabolic systems: Towards a Kalman condition
 Some recent results on controllability of coupled parabolic systems: Towards a Kalman condition F. Ammar Khodja Clermont-Ferrand, June 2011 GOAL: 1 Show the important differences between scalar and non
Some recent results on controllability of coupled parabolic systems: Towards a Kalman condition F. Ammar Khodja Clermont-Ferrand, June 2011 GOAL: 1 Show the important differences between scalar and non
CUTOFF RESOLVENT ESTIMATES AND THE SEMILINEAR SCHRÖDINGER EQUATION
 CUTOFF RESOLVENT ESTIMATES AND THE SEMILINEAR SCHRÖDINGER EQUATION HANS CHRISTIANSON Abstract. This paper shows how abstract resolvent estimates imply local smoothing for solutions to the Schrödinger equation.
CUTOFF RESOLVENT ESTIMATES AND THE SEMILINEAR SCHRÖDINGER EQUATION HANS CHRISTIANSON Abstract. This paper shows how abstract resolvent estimates imply local smoothing for solutions to the Schrödinger equation.
IDENTIFICATION OF THE CLASS OF INITIAL DATA FOR THE INSENSITIZING CONTROL OF THE HEAT EQUATION. Luz de Teresa. Enrique Zuazua
 COMMUNICATIONS ON 1.3934/cpaa.29.8.1 PURE AND APPLIED ANALYSIS Volume 8, Number 1, January 29 pp. IDENTIFICATION OF THE CLASS OF INITIAL DATA FOR THE INSENSITIZING CONTROL OF THE HEAT EQUATION Luz de Teresa
COMMUNICATIONS ON 1.3934/cpaa.29.8.1 PURE AND APPLIED ANALYSIS Volume 8, Number 1, January 29 pp. IDENTIFICATION OF THE CLASS OF INITIAL DATA FOR THE INSENSITIZING CONTROL OF THE HEAT EQUATION Luz de Teresa
On the observability of time-discrete conservative linear systems
 On the observability of time-discrete conservative linear systems Sylvain Ervedoza, Chuang Zheng and Enrique Zuazua Abstract. We consider various time discretization schemes of abstract conservative evolution
On the observability of time-discrete conservative linear systems Sylvain Ervedoza, Chuang Zheng and Enrique Zuazua Abstract. We consider various time discretization schemes of abstract conservative evolution
INTRODUCTION TO OPTIMAL DESIGN: PROBLEMS, THEORY AND NUMERICS
 Pointe-à-Pitre, December 04 INTRODUCTION TO OPTIMAL DESIGN: PROBLEMS, THEORY AND NUMERICS Enrique Zuazua Universidad Autónoma 28049 Madrid, Spain enrique.zuazua@uam.es http://www.uam.es/enrique.zuazua
Pointe-à-Pitre, December 04 INTRODUCTION TO OPTIMAL DESIGN: PROBLEMS, THEORY AND NUMERICS Enrique Zuazua Universidad Autónoma 28049 Madrid, Spain enrique.zuazua@uam.es http://www.uam.es/enrique.zuazua
Eigenvalues and eigenfunctions of the Laplacian. Andrew Hassell
 Eigenvalues and eigenfunctions of the Laplacian Andrew Hassell 1 2 The setting In this talk I will consider the Laplace operator,, on various geometric spaces M. Here, M will be either a bounded Euclidean
Eigenvalues and eigenfunctions of the Laplacian Andrew Hassell 1 2 The setting In this talk I will consider the Laplace operator,, on various geometric spaces M. Here, M will be either a bounded Euclidean
Introduction. Chapter 1. Contents. EECS 600 Function Space Methods in System Theory Lecture Notes J. Fessler 1.1
 Chapter 1 Introduction Contents Motivation........................................................ 1.2 Applications (of optimization).............................................. 1.2 Main principles.....................................................
Chapter 1 Introduction Contents Motivation........................................................ 1.2 Applications (of optimization).............................................. 1.2 Main principles.....................................................
On the Resolvent Estimates of some Evolution Equations and Applications
 On the Resolvent Estimates of some Evolution Equations and Applications Moez KHENISSI Ecole Supérieure des Sciences et de Technologie de Hammam Sousse On the Resolvent Estimates of some Evolution Equations
On the Resolvent Estimates of some Evolution Equations and Applications Moez KHENISSI Ecole Supérieure des Sciences et de Technologie de Hammam Sousse On the Resolvent Estimates of some Evolution Equations
Lucio Demeio Dipartimento di Ingegneria Industriale e delle Scienze Matematiche
 Scuola di Dottorato THE WAVE EQUATION Lucio Demeio Dipartimento di Ingegneria Industriale e delle Scienze Matematiche Lucio Demeio - DIISM wave equation 1 / 44 1 The Vibrating String Equation 2 Second
Scuola di Dottorato THE WAVE EQUATION Lucio Demeio Dipartimento di Ingegneria Industriale e delle Scienze Matematiche Lucio Demeio - DIISM wave equation 1 / 44 1 The Vibrating String Equation 2 Second
Global Carleman inequalities and theoretical and numerical control results for systems governed by PDEs
 Global Carleman inequalities and theoretical and numerical control results for systems governed by PDEs Enrique FERNÁNDEZ-CARA Dpto. E.D.A.N. - Univ. of Sevilla joint work with A. MÜNCH Lab. Mathématiques,
Global Carleman inequalities and theoretical and numerical control results for systems governed by PDEs Enrique FERNÁNDEZ-CARA Dpto. E.D.A.N. - Univ. of Sevilla joint work with A. MÜNCH Lab. Mathématiques,
Local smoothing and Strichartz estimates for manifolds with degenerate hyperbolic trapping
 Local smoothing and Strichartz estimates for manifolds with degenerate hyperbolic trapping H. Christianson partly joint work with J. Wunsch (Northwestern) Department of Mathematics University of North
Local smoothing and Strichartz estimates for manifolds with degenerate hyperbolic trapping H. Christianson partly joint work with J. Wunsch (Northwestern) Department of Mathematics University of North
Stability of nonlinear locally damped partial differential equations: the continuous and discretized problems. Part II
 . Stability of nonlinear locally damped partial differential equations: the continuous and discretized problems. Part II Fatiha Alabau-Boussouira 1 Emmanuel Trélat 2 1 Univ. de Lorraine, LMAM 2 Univ. Paris
. Stability of nonlinear locally damped partial differential equations: the continuous and discretized problems. Part II Fatiha Alabau-Boussouira 1 Emmanuel Trélat 2 1 Univ. de Lorraine, LMAM 2 Univ. Paris
Scientific Computing WS 2017/2018. Lecture 18. Jürgen Fuhrmann Lecture 18 Slide 1
 Scientific Computing WS 2017/2018 Lecture 18 Jürgen Fuhrmann juergen.fuhrmann@wias-berlin.de Lecture 18 Slide 1 Lecture 18 Slide 2 Weak formulation of homogeneous Dirichlet problem Search u H0 1 (Ω) (here,
Scientific Computing WS 2017/2018 Lecture 18 Jürgen Fuhrmann juergen.fuhrmann@wias-berlin.de Lecture 18 Slide 1 Lecture 18 Slide 2 Weak formulation of homogeneous Dirichlet problem Search u H0 1 (Ω) (here,
ROBUST NULL CONTROLLABILITY FOR HEAT EQUATIONS WITH UNKNOWN SWITCHING CONTROL MODE
 DISCRETE AND CONTINUOUS DYNAMICAL SYSTEMS Volume 34, Number 10, October 014 doi:10.3934/dcds.014.34.xx pp. X XX ROBUST NULL CONTROLLABILITY FOR HEAT EQUATIONS WITH UNKNOWN SWITCHING CONTROL MODE Qi Lü
DISCRETE AND CONTINUOUS DYNAMICAL SYSTEMS Volume 34, Number 10, October 014 doi:10.3934/dcds.014.34.xx pp. X XX ROBUST NULL CONTROLLABILITY FOR HEAT EQUATIONS WITH UNKNOWN SWITCHING CONTROL MODE Qi Lü
Infinite dimensional controllability
 Infinite dimensional controllability Olivier Glass Contents 0 Glossary 1 1 Definition of the subject and its importance 1 2 Introduction 2 3 First definitions and examples 2 4 Linear systems 6 5 Nonlinear
Infinite dimensional controllability Olivier Glass Contents 0 Glossary 1 1 Definition of the subject and its importance 1 2 Introduction 2 3 First definitions and examples 2 4 Linear systems 6 5 Nonlinear
PART IV Spectral Methods
 PART IV Spectral Methods Additional References: R. Peyret, Spectral methods for incompressible viscous flow, Springer (2002), B. Mercier, An introduction to the numerical analysis of spectral methods,
PART IV Spectral Methods Additional References: R. Peyret, Spectral methods for incompressible viscous flow, Springer (2002), B. Mercier, An introduction to the numerical analysis of spectral methods,
Propagating terraces and the dynamics of front-like solutions of reaction-diffusion equations on R
 Propagating terraces and the dynamics of front-like solutions of reaction-diffusion equations on R P. Poláčik School of Mathematics, University of Minnesota Minneapolis, MN 55455 Abstract We consider semilinear
Propagating terraces and the dynamics of front-like solutions of reaction-diffusion equations on R P. Poláčik School of Mathematics, University of Minnesota Minneapolis, MN 55455 Abstract We consider semilinear
Relaxation methods and finite element schemes for the equations of visco-elastodynamics. Chiara Simeoni
 Relaxation methods and finite element schemes for the equations of visco-elastodynamics Chiara Simeoni Department of Information Engineering, Computer Science and Mathematics University of L Aquila (Italy)
Relaxation methods and finite element schemes for the equations of visco-elastodynamics Chiara Simeoni Department of Information Engineering, Computer Science and Mathematics University of L Aquila (Italy)
Inégalités de dispersion via le semi-groupe de la chaleur
 Inégalités de dispersion via le semi-groupe de la chaleur Valentin Samoyeau, Advisor: Frédéric Bernicot. Laboratoire de Mathématiques Jean Leray, Université de Nantes January 28, 2016 1 Introduction Schrödinger
Inégalités de dispersion via le semi-groupe de la chaleur Valentin Samoyeau, Advisor: Frédéric Bernicot. Laboratoire de Mathématiques Jean Leray, Université de Nantes January 28, 2016 1 Introduction Schrödinger
Control from an Interior Hypersurface
 Control from an Interior Hypersurface Matthieu Léautaud École Polytechnique Joint with Jeffrey Galkowski Murramarang, microlocal analysis on the beach March, 23. 2018 Outline General questions Eigenfunctions
Control from an Interior Hypersurface Matthieu Léautaud École Polytechnique Joint with Jeffrey Galkowski Murramarang, microlocal analysis on the beach March, 23. 2018 Outline General questions Eigenfunctions
Partial differential equation for temperature u(x, t) in a heat conducting insulated rod along the x-axis is given by the Heat equation:
 in a heat conducting insulated rod along the x-axis is given by the Heat equation:") Chapter 7 Heat Equation Partial differential equation for temperature u(x, t) in a heat conducting insulated rod along the x-axis is given by the Heat equation: u t = ku x x, x, t > (7.1) Here k is a constant
Chapter 7 Heat Equation Partial differential equation for temperature u(x, t) in a heat conducting insulated rod along the x-axis is given by the Heat equation: u t = ku x x, x, t > (7.1) Here k is a constant
Applied Nuclear Physics (Fall 2006) Lecture 2 (9/11/06) Schrödinger Wave Equation
 Lecture 2 (9/11/06) Schrödinger Wave Equation") 22.101 Applied Nuclear Physics (Fall 2006) Lecture 2 (9/11/06) Schrödinger Wave Equation References -- R. M. Eisberg, Fundamentals of Modern Physics (Wiley & Sons, New York, 1961). R. L. Liboff, Introductory
22.101 Applied Nuclear Physics (Fall 2006) Lecture 2 (9/11/06) Schrödinger Wave Equation References -- R. M. Eisberg, Fundamentals of Modern Physics (Wiley & Sons, New York, 1961). R. L. Liboff, Introductory
Stability of nonlinear locally damped partial differential equations: the continuous and discretized problems. Part I
 . Stability of nonlinear locally damped partial differential equations: the continuous and discretized problems. Part I Fatiha Alabau-Boussouira 1 Emmanuel Trélat 2 1 Univ. de Lorraine, LMAM 2 Univ. Paris
. Stability of nonlinear locally damped partial differential equations: the continuous and discretized problems. Part I Fatiha Alabau-Boussouira 1 Emmanuel Trélat 2 1 Univ. de Lorraine, LMAM 2 Univ. Paris
TD 1: Hilbert Spaces and Applications
 Université Paris-Dauphine Functional Analysis and PDEs Master MMD-MA 2017/2018 Generalities TD 1: Hilbert Spaces and Applications Exercise 1 (Generalized Parallelogram law). Let (H,, ) be a Hilbert space.
Université Paris-Dauphine Functional Analysis and PDEs Master MMD-MA 2017/2018 Generalities TD 1: Hilbert Spaces and Applications Exercise 1 (Generalized Parallelogram law). Let (H,, ) be a Hilbert space.
Example 1. Hamilton-Jacobi equation. In particular, the eikonal equation. for some n( x) > 0 in Ω. Here 1 / 2
 > 0 in Ω. Here 1 / 2") Oct. 1 0 Viscosity S olutions In this lecture we take a glimpse of the viscosity solution theory for linear and nonlinear PDEs. From our experience we know that even for linear equations, the existence
Oct. 1 0 Viscosity S olutions In this lecture we take a glimpse of the viscosity solution theory for linear and nonlinear PDEs. From our experience we know that even for linear equations, the existence
Lecture 4: Numerical solution of ordinary differential equations
 Lecture 4: Numerical solution of ordinary differential equations Department of Mathematics, ETH Zürich General explicit one-step method: Consistency; Stability; Convergence. High-order methods: Taylor
Lecture 4: Numerical solution of ordinary differential equations Department of Mathematics, ETH Zürich General explicit one-step method: Consistency; Stability; Convergence. High-order methods: Taylor
Nonlinear Autonomous Systems of Differential
 Chapter 4 Nonlinear Autonomous Systems of Differential Equations 4.0 The Phase Plane: Linear Systems 4.0.1 Introduction Consider a system of the form x = A(x), (4.0.1) where A is independent of t. Such
Chapter 4 Nonlinear Autonomous Systems of Differential Equations 4.0 The Phase Plane: Linear Systems 4.0.1 Introduction Consider a system of the form x = A(x), (4.0.1) where A is independent of t. Such
Stability of an abstract wave equation with delay and a Kelvin Voigt damping
 Stability of an abstract wave equation with delay and a Kelvin Voigt damping University of Monastir/UPSAY/LMV-UVSQ Joint work with Serge Nicaise and Cristina Pignotti Outline 1 Problem The idea Stability
Stability of an abstract wave equation with delay and a Kelvin Voigt damping University of Monastir/UPSAY/LMV-UVSQ Joint work with Serge Nicaise and Cristina Pignotti Outline 1 Problem The idea Stability
An introduction to Mathematical Theory of Control
 An introduction to Mathematical Theory of Control Vasile Staicu University of Aveiro UNICA, May 2018 Vasile Staicu (University of Aveiro) An introduction to Mathematical Theory of Control UNICA, May 2018
An introduction to Mathematical Theory of Control Vasile Staicu University of Aveiro UNICA, May 2018 Vasile Staicu (University of Aveiro) An introduction to Mathematical Theory of Control UNICA, May 2018
Page 404. Lecture 22: Simple Harmonic Oscillator: Energy Basis Date Given: 2008/11/19 Date Revised: 2008/11/19
 Page 404 Lecture : Simple Harmonic Oscillator: Energy Basis Date Given: 008/11/19 Date Revised: 008/11/19 Coordinate Basis Section 6. The One-Dimensional Simple Harmonic Oscillator: Coordinate Basis Page
Page 404 Lecture : Simple Harmonic Oscillator: Energy Basis Date Given: 008/11/19 Date Revised: 008/11/19 Coordinate Basis Section 6. The One-Dimensional Simple Harmonic Oscillator: Coordinate Basis Page
A regularity property for Schrödinger equations on bounded domains
 A regularity property for Schrödinger equations on bounded domains Jean-Pierre Puel October 8, 11 Abstract We give a regularity result for the free Schrödinger equations set in a bounded domain of R N
A regularity property for Schrödinger equations on bounded domains Jean-Pierre Puel October 8, 11 Abstract We give a regularity result for the free Schrödinger equations set in a bounded domain of R N
Mathématiques appliquées (MATH0504-1) B. Dewals, Ch. Geuzaine
 B. Dewals, Ch. Geuzaine") Lecture 2 The wave equation Mathématiques appliquées (MATH0504-1) B. Dewals, Ch. Geuzaine V1.0 28/09/2018 1 Learning objectives of this lecture Understand the fundamental properties of the wave equation
Lecture 2 The wave equation Mathématiques appliquées (MATH0504-1) B. Dewals, Ch. Geuzaine V1.0 28/09/2018 1 Learning objectives of this lecture Understand the fundamental properties of the wave equation
Averaged control and observation of parameter-depending wave equations
 Averaged control and observation of parameter-depending wave equations Martin Lazar a, Enrique Zuazua b,c a University of Dubrovnik, Department of Electrical Engineering and Computing, Ćira Carića 4, 2
Averaged control and observation of parameter-depending wave equations Martin Lazar a, Enrique Zuazua b,c a University of Dubrovnik, Department of Electrical Engineering and Computing, Ćira Carića 4, 2
Stability of Feedback Solutions for Infinite Horizon Noncooperative Differential Games
 Stability of Feedback Solutions for Infinite Horizon Noncooperative Differential Games Alberto Bressan ) and Khai T. Nguyen ) *) Department of Mathematics, Penn State University **) Department of Mathematics,
Stability of Feedback Solutions for Infinite Horizon Noncooperative Differential Games Alberto Bressan ) and Khai T. Nguyen ) *) Department of Mathematics, Penn State University **) Department of Mathematics,
Hyperbolic inverse problems and exact controllability
 Hyperbolic inverse problems and exact controllability Lauri Oksanen University College London An inverse initial source problem Let M R n be a compact domain with smooth strictly convex boundary, and let
Hyperbolic inverse problems and exact controllability Lauri Oksanen University College London An inverse initial source problem Let M R n be a compact domain with smooth strictly convex boundary, and let
C.-H. Lamarque. University of Lyon/ENTPE/LGCB & LTDS UMR CNRS 5513
 Nonlinear Dynamics of Smooth and Non-Smooth Systems with Application to Passive Controls 3rd Sperlonga Summer School on Mechanics and Engineering Sciences on Dynamics, Stability and Control of Flexible
Nonlinear Dynamics of Smooth and Non-Smooth Systems with Application to Passive Controls 3rd Sperlonga Summer School on Mechanics and Engineering Sciences on Dynamics, Stability and Control of Flexible
1+t 2 (l) y = 2xy 3 (m) x = 2tx + 1 (n) x = 2tx + t (o) y = 1 + y (p) y = ty (q) y =
 y = 2xy 3 (m) x = 2tx + 1 (n) x = 2tx + t (o) y = 1 + y (p) y = ty (q) y =") DIFFERENTIAL EQUATIONS. Solved exercises.. Find the set of all solutions of the following first order differential equations: (a) x = t (b) y = xy (c) x = x (d) x = (e) x = t (f) x = x t (g) x = x log
DIFFERENTIAL EQUATIONS. Solved exercises.. Find the set of all solutions of the following first order differential equations: (a) x = t (b) y = xy (c) x = x (d) x = (e) x = t (f) x = x t (g) x = x log
Hardy inequalities, heat kernels and wave propagation
 Outline Hardy inequalities, heat kernels and wave propagation Basque Center for Applied Mathematics (BCAM) Bilbao, Basque Country, Spain zuazua@bcamath.org http://www.bcamath.org/zuazua/ Third Brazilian
Outline Hardy inequalities, heat kernels and wave propagation Basque Center for Applied Mathematics (BCAM) Bilbao, Basque Country, Spain zuazua@bcamath.org http://www.bcamath.org/zuazua/ Third Brazilian
WHY POLYNOMIALS? PART 1
 WHY POLYNOMIALS? PART 1 The proofs of finite field Kakeya and joints and short and clean, but they also seem strange to me. They seem a little like magic tricks. In particular, what is the role of polynomials
WHY POLYNOMIALS? PART 1 The proofs of finite field Kakeya and joints and short and clean, but they also seem strange to me. They seem a little like magic tricks. In particular, what is the role of polynomials
Chapter 18. Remarks on partial differential equations
 Chapter 8. Remarks on partial differential equations If we try to analyze heat flow or vibration in a continuous system such as a building or an airplane, we arrive at a kind of infinite system of ordinary
Chapter 8. Remarks on partial differential equations If we try to analyze heat flow or vibration in a continuous system such as a building or an airplane, we arrive at a kind of infinite system of ordinary
Krzysztof Burdzy Wendelin Werner
 A COUNTEREXAMPLE TO THE HOT SPOTS CONJECTURE Krzysztof Burdzy Wendelin Werner Abstract. We construct a counterexample to the hot spots conjecture; there exists a bounded connected planar domain (with two
A COUNTEREXAMPLE TO THE HOT SPOTS CONJECTURE Krzysztof Burdzy Wendelin Werner Abstract. We construct a counterexample to the hot spots conjecture; there exists a bounded connected planar domain (with two
EN Nonlinear Control and Planning in Robotics Lecture 3: Stability February 4, 2015
 EN530.678 Nonlinear Control and Planning in Robotics Lecture 3: Stability February 4, 2015 Prof: Marin Kobilarov 0.1 Model prerequisites Consider ẋ = f(t, x). We will make the following basic assumptions
EN530.678 Nonlinear Control and Planning in Robotics Lecture 3: Stability February 4, 2015 Prof: Marin Kobilarov 0.1 Model prerequisites Consider ẋ = f(t, x). We will make the following basic assumptions
Implicitely and Densely Discrete Black-Box Optimization Problems
 Implicitely and Densely Discrete Black-Box Optimization Problems L. N. Vicente September 26, 2008 Abstract This paper addresses derivative-free optimization problems where the variables lie implicitly
Implicitely and Densely Discrete Black-Box Optimization Problems L. N. Vicente September 26, 2008 Abstract This paper addresses derivative-free optimization problems where the variables lie implicitly
Microlocal analysis and inverse problems Lecture 3 : Carleman estimates
 Microlocal analysis and inverse problems ecture 3 : Carleman estimates David Dos Santos Ferreira AGA Université de Paris 13 Monday May 16 Instituto de Ciencias Matemáticas, Madrid David Dos Santos Ferreira
Microlocal analysis and inverse problems ecture 3 : Carleman estimates David Dos Santos Ferreira AGA Université de Paris 13 Monday May 16 Instituto de Ciencias Matemáticas, Madrid David Dos Santos Ferreira
Strichartz estimates for the Schrödinger equation on polygonal domains
 estimates for the Schrödinger equation on Joint work with Matt Blair (UNM), G. Austin Ford (Northwestern U) and Sebastian Herr (U Bonn and U Düsseldorf)... With a discussion of previous work with Andrew
estimates for the Schrödinger equation on Joint work with Matt Blair (UNM), G. Austin Ford (Northwestern U) and Sebastian Herr (U Bonn and U Düsseldorf)... With a discussion of previous work with Andrew
Second Order Elliptic PDE
 Second Order Elliptic PDE T. Muthukumar tmk@iitk.ac.in December 16, 2014 Contents 1 A Quick Introduction to PDE 1 2 Classification of Second Order PDE 3 3 Linear Second Order Elliptic Operators 4 4 Periodic
Second Order Elliptic PDE T. Muthukumar tmk@iitk.ac.in December 16, 2014 Contents 1 A Quick Introduction to PDE 1 2 Classification of Second Order PDE 3 3 Linear Second Order Elliptic Operators 4 4 Periodic
Ordinary Differential Equation Theory
 Part I Ordinary Differential Equation Theory 1 Introductory Theory An n th order ODE for y = y(t) has the form Usually it can be written F (t, y, y,.., y (n) ) = y (n) = f(t, y, y,.., y (n 1) ) (Implicit
Part I Ordinary Differential Equation Theory 1 Introductory Theory An n th order ODE for y = y(t) has the form Usually it can be written F (t, y, y,.., y (n) ) = y (n) = f(t, y, y,.., y (n 1) ) (Implicit