CHAPTER 6 CLOSED LOOP STUDIES
|
|
|
- Isabel Hood
- 6 years ago
- Views:
Transcription
1 180 CHAPTER 6 CLOSED LOOP STUDIES Improvement of closed-loop performance needs proper tuning of controller parameters that requires process model structure and the estimation of respective parameters which are discussed in detail in the previous chapter. The present chapter discusses the methods for the design of multi-loop control strategy and tuning of controller parameters. In order to achieve desired quality, specified output characteristics at the cost of spending optimum inputs one needs to design a controller and run the plant under closed loop so that optimal production is achieved under safe operation. 6.1 INTRODUCTION Controllers for MIMO systems can be either multi-loop (Controllers are designed only for diagonal elements of process models of transfer function matrix) or multivariable (Controllers are designed for all the elements of the MIMO transfer function matrix). Multi-loop control scheme has an edge over multivariable as the former can work even if a single-loop fails. In the presence of interactions between input/ output the process needs to be decoupled and then multi-loop controllers can be designed. When interaction effects produce a significant deterioration in control system performance, decoupling control has to be considered. Thus multi-loop or multivariable controller involves the objective of maintaining several controlled variables at independent set points.
2 181 Many researchers have worked on design of multi-loop controllers for MIMO systems. Luyben (1986) presented a simple practical approach to the problem of finding reasonable controller settings for N SISO controllers in N th order which is a typical industrial multivariable process. Loh et al (1993) proposed the autotuning of multi-loop PI controller. This procedure is the combination of sequential loop closing and relay tuning often used for tuning single PI/ PID controllers. Huang et al (1993) proposed and implemented PID controllers with the form of no proportional kick. Shen et al (1994) proposed multivariable automatic tuning that performs the identificationdesign procedure in a sequential manner which discusses the concept of multivariable autotuner and the underlying theory for sequential design and sequential identification employed in autotuning procedure. Palmor et al (1995) proposed the automatic tuning of decentralized PID controllers for TITO processes. Huang et al (2000) derived tuning rule from inverse based PID controllers. Toh et al (2002) proposed a methodology for autotuning decentralized proportional-integral-derivative (PID) controllers for multivariable systems. Lee et al (2004) proposed a tuning method for multiloop PID controllers by extending the generalized IMC PID tuning method for SISO systems. Liu et al (2005) proposed an analytical multi-loop controller design for industrial and chemical 2-by-2 processes with time delays. Vu et al (2008) proposed a new analytical method based on direct synthesis approach for design of multi-loop PID controllers. This method is aimed to achieve desired closed loop response for MIMO systems with multiple time delays. Lin et al (2009) proposed a systematic procedure to design multivariable controllers that have options for selective decoupling of different structures (e.g. full or partial decoupler). Vu et al (2010) proposed a novel method for independent design of multi-loop PI/ PID controllers. The idea of an effective open-loop transfer function (EOTF) is introduced to decompose multi-loop control system into a set of equivalent independent single-loops. Veronesi and Visoli (2011) proposed a new automatic tuning
3 182 technique for multi-loop PID controllers applied to MIMO systems. Jeng et al (2011) proposed the methods including model identification, controller monitoring and controller retuning which in turn combined to develop an intelligent control systems. Rajapandiyan and Chidambaram (2012) proposed a method for the independent design of PI/ PID controllers based on equivalent transfer function (ETF) model of individual loops and simplified decoupler matrix. 6.2 DIFFERENT CONTROL DESIGN STRATEGIES MIMO systems came into use in chemical industries as the processes were redesigned to improve efficiency. Multivariable control involves the objective of maintaining several controlled variables at independent set points. Interaction between inputs and output cause a manipulated variable to affect more than one controlled variable. The various control schemes studied here are decentralized, centralized and decoupled systems. In decentralized structure diagonal controllers are used hence, result in system having n controllers whereas in the centralized control systems having n x n controllers. In decoupled systems the process interactions are decoupled before they actually reach and affect the processes Centralized Structure Centralized control scheme is a full multivariable controller where the controller matrix is not a mere diagonal one. The decentralized control scheme is preferred over the centralized control scheme mainly because the control system has only n manipulated signals controlling n output variables, and the operator can easily understand the control loops. However, the design methods of such decentralized controllers require first pairing of input-output variables whereas tuning of controllers requires trial and error steps. The centralized control system requires n x n controllers for controlling n output
4 183 variables using n manipulated variables. While calculating the control action using computer, the problem of requiring n x n controllers does not exist. The advantage of centralized controller is easy to tune even with the knowledge of steady state gain matrix alone thereby multivariable PI controllers can be easily designed. For the centralized structure, Internal model control-proportional integral tuning is adopted based on the studies and recommendations of Reddy et al (1997) on tuning of centralized PI controllers for a Multi-stage flash desalination plant using Davison, Maciejowski and Tanttu-Lieslehto methods. The IMC-PID tuning relations are used in tuning the controller. When a first order system is in the form as follows: k e Dp s p s 1 p, the PI controller settings are K C k l p (6.1) (6.2) I p where l max 1/ 0.7 D,0.2 p p These tuning relations are derived by comparing IMC control with the conventional PID controller and thereby formulating the equations to determine the proportional gain and integral time.
5 Decentralized Structure In spite of developments in advanced controller synthesis for multivariable controllers, decentralized controller remain popular in industries because of the following reasons: 1. Decentralized controllers are easy to implement. 2. They are easy for operators to understand. 3. The operators can easily retune the controllers for change in process conditions. 4. Some manipulated variables may fail. Tolerances of such failures are easily incorporated into the design of decentralized controllers than the full controllers. 5. The control system can be bought gradually into service during process start up and taken gradually out of service during shut down. steps: The design of decentralized control system consists of two main Step 1 Step 2 control structure selection design of SISO controller for each loop. In decentralized control of multivariable systems, the system is decomposed into number of subsystems and individual controllers are designed for each subsystem.
6 185 For tuning of controller, Biggest Log Modulus Tuning (BLT) method is used (Luyben, 1986), which is an extension of Multivariable Nyquist Criterion and gives satisfactory response. Detuning factor F (typical values are said to vary between 2 and 5) is chosen so that closed-loop log modulus L max cm >= 2n, w L cm = 20log (6.3) 1+w ( p c) w = - 1+ det I + G G (6.4) where G C is n x n diagonal matrix of PI controller transfer functions, G p is n x n matrix containing process transfer functions relating n controlled variables to n manipulated variables. Now the PI controller parameters are given as: K Ci K = CiZ-N (6.5) F Ii F IiZ-N (6.6) where i stands for individual transfer function component, K CiZ-N and IiZ-N are Ziegler-Nichols tuning parameters. These parameters are calculated from the system perturbed in closed loop by relay of amplitude h, reaches a limit cycle whose amplitude a and period of oscillation P u. These parameters are correlated with the ultimate gain (K u ) and frequency ( u) by the following relationships: K u 4h a (6.7)
7 186 u 2 P u (6.8) Detuning factor F determines the stability of each loop. The larger the value of F more stable the system is but the set point and load responses is sluggish. This method yield settings give a reasonable compromise between stability and performance in multivariable systems. The decentralized scheme is more advantageous in fact that the system remains stable even when one controller goes down and easier to tune because of less number of tuning parameters. However, pairing analysis needs to be done as n! pairings between input/ output Decoupled Structure This structure has additional elements called decouplers to compensate for interaction phenomenon. When RGA shows strong interaction then a decoupler is designed. However, decouplers are designed only for order less than 3 as the design procedure becomes more complex as the order increases. The BLT (Luyben, 1986) procedure of tuning the decentralized structure follows the generalized way for all n x n systems as mentioned above. The centralized controllers are tuned using IMC-PI tuning relations which are appropriately selected for first order and second order systems. The decoupled structure adopts the various methods like partial, static and dynamic decoupling to produce the best results. The design equations for general decoupler for n x n systems are conveniently summarized using matrix notations, defined as follows:
8 187 Transfer function matrix, G G s G s 11 1n G s G s n1 nn Decoupler matrix, D D s D s 11 1n D s D s n1 nn Diagonal matrix of decoupler, H H s H s H s u u 1... u n ; M M... M 1 n ; y y 1... y n Manipulated variable (new) Manipulated variable (old) Output variable For a decoupled multivariable system output can be written as: where, y GM (6.9) M=Du (6.10) Equation (6.10) becomes: y GDu (6.11) Equation (6.11) becomes: y Hu (6.12) GD=H (6.13)
9 188-1 (or) D=G H (6.14) which defines the decoupler. For 2-by-2 system, equations are derived for decouplers by taking that loop as well as other interacting loops into account. The scope of the discussion is the decentralized PI controller for MIMO systems and the closed loop responses for set point tracking using BLT tuning and IMC-PID Laurent series. The illustrations of decentralized PI controllers are given in the following section using BLT tuning. 6.3 BIGGEST LOG MODULUS TUNING Luyben proposed BLT tuning involves the following four steps: Step 1 : Calculate the Ziegler-Nichols settings for each individual loop. The ultimate gain and ultimate frequency of each diagonal transfer function G jj (s) are calculated in the classical way. To do numerically, a value of frequency, is guessed. The phase angle is calculated and the frequency is varied to find the point where the Nyquist plot of G jj crosses the negative real axis (the phase angle is -180 degrees). The frequency where it occurs is u. The reciprocal of the real part of G jj is the ultimate gain. Step 2 : Detuning factor F is assumed which is always greater than 1. Typical values are between 1.5 and 4. The gain of all feedback controllers K Ci are calculated by assuming Ziegler- Nichols gain K ZNi by the factor F. K Ci KZNi F
10 189 where, K K ui ZNi 2.2 Then all feedback controller reset times Ii are calculated by multiplying the Z-N reset times ZNi by the same factor F. Ii ZNi F where Pui ZNi 1.2 The F factor can be considered as detuning factor which is applied to all loops. Larger the value of F more stable the system will be but more sluggish will be the set point and load responses. The method yield settings that give a reasonable compromise between stability and performance in multivariable systems. Step 3 : Using the guessed value of F and the resulting controller settings, a multivariable nyquist plot of scalar function W i 1 det I GM i B is made. The point (-1, 0) is closer to this contour then the system is closer to instability. Therefore the quantity w 1+w will be similar to closed loop G servo transfer function for SISO loop M B 1+ GMB. Based on intuition and empirical grounds, multivariable closed loop log modulus L cm is defined. cm 20log w L 1 w The peak in the plot of L cm over the entire frequency range is the biggest log modulus L max cm.
11 190 Step 4 : The F factor is varied until L max cm is equal to 2N. Where N is the order of the system. For N=1 in SISO case, the familiar +2dB max closed loop log modulus criterion is obtained. For a 2-by-2 system, a +4dB value of L max cm is used and for 3-by-3 system a +6dB; hence forth. An example given here is 2-by-2 MIMO system (WB column) with transfer function matrix as in Equation (2.1). Step 1: The ultimate gain and ultimate frequency for loop 1 and loop 2 are K u1 = 2.112, P u1 = 3.9 and K u2 = , P u2 = Using Ziegler- Nichols settings the following controllers are obtained for loop 1 and loop 2 that are K C1,ZN 11,ZN = 3.25 and K C2,ZN = 0.19, 12,ZN = 9.2. Step 2: Assuming, F = Step 3: The F factor is varied until L max cm is equal to 4 for 2-by-2 MIMO systems. This empirically determined BLT criterion is tested on ten multivariable distillation columns, varying from 2-by-2 system upto 4-by-4 MIMO systems (Luyben, 1986). 6.4 IMC PID LAURENT TUNING IMC-PI controller parameters are derived by equating the closed loop response to desired closed-loop response involving user defined tuning in process transfer function. Controller synthesis procedure using desired closed loop response involves synthesis of coefficient terms s 0, s -1 and s 1 in
12 191 PID parallel structure are discussed briefly by Panda (2009) in section Thus, the IMC-PI controller parameters for FOPDT processes are computed using the following expressions: K C D 2 I p ; I p p p p k D D 6.5 RESULTS AND DISCUSSION The parameters of multi-loop controllers using IMC and BLT design for MIMO processes are listed in the following Table 6.1.
13 192 Table 6.1 Parameters of multi-loop PI controllers for MIMO processes S.no Process BLT design IMC design 1 WB VL WW TS OR T T K C I K C I DL A A
 0 2 i The simulation results and ISE values are given in Figures 6.1 to 6.10. The results show that IMC design provides better performance than BLT design. Figure 6.")
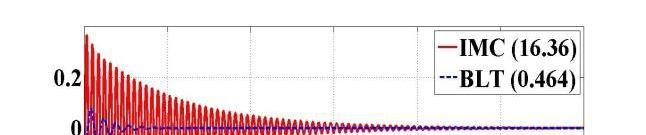
14 193 To evaluate the output control performance, it is considered a unit setpoint change of all control loops one by one and the integral square error ISE ( e i y i r i ) used to evaluate the control performance. ISE e dt (6.15) 0 2 i The simulation results and ISE values are given in Figures 6.1 to The results show that IMC design provides better performance than BLT design. Figure 6.1 Step response and ISE values of multi-loop PI controllers for WB column (solid line: IMC design; dashed line: BLT design)

15 194 Figure 6.2 Step response and ISE values of multi-loop PI controllers for VL column (solid line: IMC design; dashed line: BLT design)


16 195 Figure 6.3 Step response and ISE values of multi-loop PI controllers for WW column (solid line: IMC design; dashed line: BLT design)


17 196 Figure 6.4 Step response and ISE values of multi-loop PI controllers for TS column (solid line: IMC design; dashed line: BLT design)



18 Figure 6.5 Step response and ISE values of multi-loop PI controllers for OR column (solid line: IMC design; dashed line: BLT design) 19


19 Figure 6.6 Step response and ISE values of multi-loop PI controllers for T1 column (solid line: BLT design)








20 Figure 6.7 Step response and ISE values of multi-loop PI controllers for T4 column (solid line: BLT design)

21 Figure 6.8 Step response and ISE values of multi-loop PI controllers for DL column (solid line: BLT design)
 Step")

22 Figure 6.9 line: BLT design) Step response and ISE values of multi-loop PI controllers for A1 column (solid
23 Figure 6.10 Step response and ISE values of multi-loop PI controllers for A2 column (solid line: BLT design)
24 OPTIMAL CONTROL DESIGN The main objective of the present work is to capture the disturbance dynamics thereby measure the interaction in terms of area under the closed loop undesired response. The goal is to minimize the interaction by using medium-scale algorithm with termination tolerances for step and objective function in the order of The optimization gives the solution for proportional and integral gains (K C, K I ) of the controller after 73 function evaluations Parameter Optimization The performance of closed-loop system is measured with single scalar quantity performance index. Performance of each loop needs to be better or improved at the cost of spending optimal/ minimum inputs. Thus the problem is to formulate performance criteria that will lead to find optimal solution of manipulated inputs. It needs to determine control configuration selection and the free parameters of controller that optimizes the performance index. A linear 2-by-2 MIMO process is considered to formulate performance criteria. The optimal controller parameters found from the solution will be used to retune the loops so as to minimize loss through undesirable response and unnecessary disturbance through undesired loops. A commonly used performance criterion is the area under the regulatory response which is given by: J y t dt (6.16) 0 2 This criterion has good mathematical track ability properties which is acceptable in practice as a measure of system performance. Smaller the
25 204 value J results in small overshoot in the system. Since, the integration is carried out ov all error lasting for long time and thus results in small settling time. Also, a finite J implies that the steady state error is zero. Therefore, a more realistic performance index is of the form: J y t dt subject to the following constraint on control signalu t, max 0 2 u t M for some constant M M determined by the linear range of plant. 2 u t is a measure of instantaneous rate of energy expenditure. To minimize energy expenditure: 0 2 u t dt. To replace the performance criterion the following quadratic performance index as: 2 2 J e t u t dt (6.17) 0 To allow greater generality, a real positive constant inserted to obtain the performance criterion J. can be 2 2 J e t u t dt (6.18) 0 By adjusting the weighting factor, one can weight the relative importance of the system error and the expenditure in energy. Increasing the by giving sufficient weight to control effort, the amplitude of the control
26 205 signal which minimizes the overall performance index which may be kept within practical bounds although at the expenses of increased system error. In this work, the main intention is to show the amount of interaction obtainable in area calculation of closed loop undesirable/ regulatory responses. For a general MIMO systems cost is minimized by changing the input control signal, u. The control pairing which needs the least area to fulfill its control targets will be the most efficient control pairing. the following steps: The design approach based on parameter optimization consists of Step 0 : Compute the performance index (J) as a function of free parameters k 1, k 2 k n, of the system with fixed configuration. J J k1, k2... k n (6.19) Step 1 : Determine the solution set k i of the equations J k i 0; i 1,2...n (6.20) Equation (6.17) gives the necessary conditions for J to be minimum. From the solution set of these equations, find the subset that satisfies the sufficient conditions which requires that hessian matrix given is positive definite J J J... k k k k k n J J J... H k k k k k2 2 n J J J... k k k k k 2 n 1 n 2 n
27 206 Since, 2 2 J J k k k k i j j i the matrix H is always symmetric. Step 2 : If there are two or more sets of k i satisfying the necessary and sufficient conditions for minimization of J, then compute the corresponding J for each set. The set which gives the smallest J is optimum set. In this work, the performance of the control system can be adequately specified in terms of settling time, overshoot and steady state error. Thus, the performance index can be chosen as J k 1 (settling time) + k 2 (overshoot) + k 3 (steady state error) (6.21) In this work, the performance index which includes the undesirable system characteristics and in addition good mathematical track ability are presented. The performance indexes often involve integrating closed loop regulatory response when the system is subjected to a standard disturbance such as a step. The system whose design minimizes the selected performance index on controller configuration is the optimal Monitoring of Closed Loop Undesired Responses and Redesign of Controllers The optimization toolbox routine offers a choice of algorithms. For constrained minimization, minimax, goal attainment and semi-infinite optimization, variations of sequential quadratic programming are used. Nonlinear least squares problem uses the gauss-newton and levenbergmarquardt methods. To optimize the control parameters in simulink model optsim.mdl (This model can be found in the optimization toolbox optim directory) which
28 207 includes nonlinear process plant (Equation 2.11) modeled as a simulink block diagram. The problem is to design a feedback control law that tracks unit step input to the system. One way to solve this problem is to minimize the error between the output and the input signal. The variables are parameters of PI controllers. The routine lsqnonlin is used to perform a least squares fit. The function tracklsq must run the simulation. The simulation can be run either in the base workspace or in current workspace. To run the simulation in optsim, the variables K P, K I, a 1 and a 2 (a 1 and a 2 are variables in the plant block) must be defined. K P and K I are the variables that are optimizing here. The simulation is performed using fixed-step fifth-order method to 100 seconds. in Table 6.2: The controller settings before and after optimization are tabulated Table 6.2 Controller parameters and area under undesired response for coupled tanks system Controller parameters Before optimization After optimization k c I Area Before optimization After optimization With these controller settings, the closed loop undesired responses before and after optimization is shown in Figure 6.11.
29 208 Figure 6.11 Closed loop undesired responses Performance measure Control effort calculated using this objective function is optimum that saved energy. Thus, for the coupled tanks system gain optimum is calculated as: Gain optimum = * % Optimum gain in this coupled tanks system is 5% when the disturbance is 10%, thus the control effort is calculated using this objective function which is found to be optimum that saved energy. Hence, the optimized control signal has saved 5% of utility in this particular coupled tanks system.
30 209 The performance is measured using standard deviation and variances are shown in Table 6.3. Table 6.3 Performance measure Performance measure Before optimization After optimization Standard deviation Variance SUMMARY In this chapter multi-loop PI controllers are designed and tuned for all 10 distillation columns for the cited examples. The control effort and performance of closed-loop for all cases are evaluated here. It is found that IMC-PI control tuning rule produces lower IAE with smoother responses. Thus, it can be concluded that IMC-PI works better than BLT method.
Improved Identification and Control of 2-by-2 MIMO System using Relay Feedback
 CEAI, Vol.17, No.4 pp. 23-32, 2015 Printed in Romania Improved Identification and Control of 2-by-2 MIMO System using Relay Feedback D.Kalpana, T.Thyagarajan, R.Thenral Department of Instrumentation Engineering,
CEAI, Vol.17, No.4 pp. 23-32, 2015 Printed in Romania Improved Identification and Control of 2-by-2 MIMO System using Relay Feedback D.Kalpana, T.Thyagarajan, R.Thenral Department of Instrumentation Engineering,
Feedback Control of Linear SISO systems. Process Dynamics and Control
 Feedback Control of Linear SISO systems Process Dynamics and Control 1 Open-Loop Process The study of dynamics was limited to open-loop systems Observe process behavior as a result of specific input signals
Feedback Control of Linear SISO systems Process Dynamics and Control 1 Open-Loop Process The study of dynamics was limited to open-loop systems Observe process behavior as a result of specific input signals
MULTILOOP CONTROL APPLIED TO INTEGRATOR MIMO. PROCESSES. A Preliminary Study
 MULTILOOP CONTROL APPLIED TO INTEGRATOR MIMO PROCESSES. A Preliminary Study Eduardo J. Adam 1,2*, Carlos J. Valsecchi 2 1 Instituto de Desarrollo Tecnológico para la Industria Química (INTEC) (Universidad
MULTILOOP CONTROL APPLIED TO INTEGRATOR MIMO PROCESSES. A Preliminary Study Eduardo J. Adam 1,2*, Carlos J. Valsecchi 2 1 Instituto de Desarrollo Tecnológico para la Industria Química (INTEC) (Universidad
MULTILOOP PI CONTROLLER FOR ACHIEVING SIMULTANEOUS TIME AND FREQUENCY DOMAIN SPECIFICATIONS
 Journal of Engineering Science and Technology Vol. 1, No. 8 (215) 113-1115 School of Engineering, Taylor s University MULTILOOP PI CONTROLLER FOR ACHIEVING SIMULTANEOUS TIME AND FREQUENCY DOMAIN SPECIFICATIONS
Journal of Engineering Science and Technology Vol. 1, No. 8 (215) 113-1115 School of Engineering, Taylor s University MULTILOOP PI CONTROLLER FOR ACHIEVING SIMULTANEOUS TIME AND FREQUENCY DOMAIN SPECIFICATIONS
CHAPTER 3 TUNING METHODS OF CONTROLLER
 57 CHAPTER 3 TUNING METHODS OF CONTROLLER 3.1 INTRODUCTION This chapter deals with a simple method of designing PI and PID controllers for first order plus time delay with integrator systems (FOPTDI).
57 CHAPTER 3 TUNING METHODS OF CONTROLLER 3.1 INTRODUCTION This chapter deals with a simple method of designing PI and PID controllers for first order plus time delay with integrator systems (FOPTDI).
Design of Decentralised PI Controller using Model Reference Adaptive Control for Quadruple Tank Process
 Design of Decentralised PI Controller using Model Reference Adaptive Control for Quadruple Tank Process D.Angeline Vijula #, Dr.N.Devarajan * # Electronics and Instrumentation Engineering Sri Ramakrishna
Design of Decentralised PI Controller using Model Reference Adaptive Control for Quadruple Tank Process D.Angeline Vijula #, Dr.N.Devarajan * # Electronics and Instrumentation Engineering Sri Ramakrishna
Research Article Volume 6 Issue No. 6
 DOI 1.41/216.1797 ISSN 2321 3361 216 IJESC ` Research Article Volume 6 Issue No. 6 Design of Multi Loop PI/PID Controller for Interacting Multivariable Process with Effective Open Loop Transfer Function
DOI 1.41/216.1797 ISSN 2321 3361 216 IJESC ` Research Article Volume 6 Issue No. 6 Design of Multi Loop PI/PID Controller for Interacting Multivariable Process with Effective Open Loop Transfer Function
Numerical Solution for Multivariable Idle Speed Control of a Lean Burn Natural Gas Engine
 Numerical Solution for Multivariable Idle Speed Control of a Lean Burn Natural Gas Engine Arvind Sivasubramanian, Peter H. Meckl Abstract This paper proposes a numerical solution to the idle speed and
Numerical Solution for Multivariable Idle Speed Control of a Lean Burn Natural Gas Engine Arvind Sivasubramanian, Peter H. Meckl Abstract This paper proposes a numerical solution to the idle speed and
Control of MIMO processes. 1. Introduction. Control of MIMO processes. Control of Multiple-Input, Multiple Output (MIMO) Processes
 Processes") Control of MIMO processes Control of Multiple-Input, Multiple Output (MIMO) Processes Statistical Process Control Feedforward and ratio control Cascade control Split range and selective control Control
Control of MIMO processes Control of Multiple-Input, Multiple Output (MIMO) Processes Statistical Process Control Feedforward and ratio control Cascade control Split range and selective control Control
3.1 Overview 3.2 Process and control-loop interactions
 3. Multivariable 3.1 Overview 3.2 and control-loop interactions 3.2.1 Interaction analysis 3.2.2 Closed-loop stability 3.3 Decoupling control 3.3.1 Basic design principle 3.3.2 Complete decoupling 3.3.3
3. Multivariable 3.1 Overview 3.2 and control-loop interactions 3.2.1 Interaction analysis 3.2.2 Closed-loop stability 3.3 Decoupling control 3.3.1 Basic design principle 3.3.2 Complete decoupling 3.3.3
University of Science and Technology, Sudan Department of Chemical Engineering.
 ISO 91:28 Certified Volume 3, Issue 6, November 214 Design and Decoupling of Control System for a Continuous Stirred Tank Reactor (CSTR) Georgeous, N.B *1 and Gasmalseed, G.A, Abdalla, B.K (1-2) University
ISO 91:28 Certified Volume 3, Issue 6, November 214 Design and Decoupling of Control System for a Continuous Stirred Tank Reactor (CSTR) Georgeous, N.B *1 and Gasmalseed, G.A, Abdalla, B.K (1-2) University
Index. INDEX_p /15/02 3:08 PM Page 765
 INDEX_p.765-770 11/15/02 3:08 PM Page 765 Index N A Adaptive control, 144 Adiabatic reactors, 465 Algorithm, control, 5 All-pass factorization, 257 All-pass, frequency response, 225 Amplitude, 216 Amplitude
INDEX_p.765-770 11/15/02 3:08 PM Page 765 Index N A Adaptive control, 144 Adiabatic reactors, 465 Algorithm, control, 5 All-pass factorization, 257 All-pass, frequency response, 225 Amplitude, 216 Amplitude
DECENTRALIZED PI CONTROLLER DESIGN FOR NON LINEAR MULTIVARIABLE SYSTEMS BASED ON IDEAL DECOUPLER
 th June 4. Vol. 64 No. 5-4 JATIT & LLS. All rights reserved. ISSN: 99-8645 www.jatit.org E-ISSN: 87-395 DECENTRALIZED PI CONTROLLER DESIGN FOR NON LINEAR MULTIVARIABLE SYSTEMS BASED ON IDEAL DECOUPLER
th June 4. Vol. 64 No. 5-4 JATIT & LLS. All rights reserved. ISSN: 99-8645 www.jatit.org E-ISSN: 87-395 DECENTRALIZED PI CONTROLLER DESIGN FOR NON LINEAR MULTIVARIABLE SYSTEMS BASED ON IDEAL DECOUPLER
A unified approach for proportional-integral-derivative controller design for time delay processes
 Korean J. Chem. Eng., 32(4), 583-596 (2015) DOI: 10.1007/s11814-014-0237-6 INVITED REVIEW PAPER INVITED REVIEW PAPER pissn: 0256-1115 eissn: 1975-7220 A unified approach for proportional-integral-derivative
Korean J. Chem. Eng., 32(4), 583-596 (2015) DOI: 10.1007/s11814-014-0237-6 INVITED REVIEW PAPER INVITED REVIEW PAPER pissn: 0256-1115 eissn: 1975-7220 A unified approach for proportional-integral-derivative
Index Accumulation, 53 Accuracy: numerical integration, sensor, 383, Adaptive tuning: expert system, 528 gain scheduling, 518, 529, 709,
 Accumulation, 53 Accuracy: numerical integration, 83-84 sensor, 383, 772-773 Adaptive tuning: expert system, 528 gain scheduling, 518, 529, 709, 715 input conversion, 519 reasons for, 512-517 relay auto-tuning,
Accumulation, 53 Accuracy: numerical integration, 83-84 sensor, 383, 772-773 Adaptive tuning: expert system, 528 gain scheduling, 518, 529, 709, 715 input conversion, 519 reasons for, 512-517 relay auto-tuning,
Multi-Loop Control. Department of Chemical Engineering,
 Interaction ti Analysis and Multi-Loop Control Sachin C. Patawardhan Department of Chemical Engineering, I.I.T. Bombay Outline Motivation Interactions in Multi-loop control Loop pairing using Relative
Interaction ti Analysis and Multi-Loop Control Sachin C. Patawardhan Department of Chemical Engineering, I.I.T. Bombay Outline Motivation Interactions in Multi-loop control Loop pairing using Relative
Multi-Input Multi-output (MIMO) Processes CBE495 LECTURE III CONTROL OF MULTI INPUT MULTI OUTPUT PROCESSES. Professor Dae Ryook Yang
 Processes CBE495 LECTURE III CONTROL OF MULTI INPUT MULTI OUTPUT PROCESSES. Professor Dae Ryook Yang") Multi-Input Multi-output (MIMO) Processes CBE495 LECTURE III CONTROL OF MULTI INPUT MULTI OUTPUT PROCESSES Professor Dae Ryook Yang Fall 2013 Dept. of Chemical and Biological Engineering Korea University
Multi-Input Multi-output (MIMO) Processes CBE495 LECTURE III CONTROL OF MULTI INPUT MULTI OUTPUT PROCESSES Professor Dae Ryook Yang Fall 2013 Dept. of Chemical and Biological Engineering Korea University
CHAPTER 5 ROBUSTNESS ANALYSIS OF THE CONTROLLER
 114 CHAPTER 5 ROBUSTNESS ANALYSIS OF THE CONTROLLER 5.1 INTRODUCTION Robust control is a branch of control theory that explicitly deals with uncertainty in its approach to controller design. It also refers
114 CHAPTER 5 ROBUSTNESS ANALYSIS OF THE CONTROLLER 5.1 INTRODUCTION Robust control is a branch of control theory that explicitly deals with uncertainty in its approach to controller design. It also refers
Iterative Controller Tuning Using Bode s Integrals
 Iterative Controller Tuning Using Bode s Integrals A. Karimi, D. Garcia and R. Longchamp Laboratoire d automatique, École Polytechnique Fédérale de Lausanne (EPFL), 05 Lausanne, Switzerland. email: alireza.karimi@epfl.ch
Iterative Controller Tuning Using Bode s Integrals A. Karimi, D. Garcia and R. Longchamp Laboratoire d automatique, École Polytechnique Fédérale de Lausanne (EPFL), 05 Lausanne, Switzerland. email: alireza.karimi@epfl.ch
CHBE320 LECTURE XI CONTROLLER DESIGN AND PID CONTOLLER TUNING. Professor Dae Ryook Yang
 CHBE320 LECTURE XI CONTROLLER DESIGN AND PID CONTOLLER TUNING Professor Dae Ryook Yang Spring 2018 Dept. of Chemical and Biological Engineering 11-1 Road Map of the Lecture XI Controller Design and PID
CHBE320 LECTURE XI CONTROLLER DESIGN AND PID CONTOLLER TUNING Professor Dae Ryook Yang Spring 2018 Dept. of Chemical and Biological Engineering 11-1 Road Map of the Lecture XI Controller Design and PID
Research Article. World Journal of Engineering Research and Technology WJERT.
 wjert, 2015, Vol. 1, Issue 1, 27-36 Research Article ISSN 2454-695X WJERT www.wjert.org COMPENSATOR TUNING FOR DISTURBANCE REJECTION ASSOCIATED WITH DELAYED DOUBLE INTEGRATING PROCESSES, PART I: FEEDBACK
wjert, 2015, Vol. 1, Issue 1, 27-36 Research Article ISSN 2454-695X WJERT www.wjert.org COMPENSATOR TUNING FOR DISTURBANCE REJECTION ASSOCIATED WITH DELAYED DOUBLE INTEGRATING PROCESSES, PART I: FEEDBACK
Design and Tuning of Fractional-order PID Controllers for Time-delayed Processes
 Design and Tuning of Fractional-order PID Controllers for Time-delayed Processes Emmanuel Edet Technology and Innovation Centre University of Strathclyde 99 George Street Glasgow, United Kingdom emmanuel.edet@strath.ac.uk
Design and Tuning of Fractional-order PID Controllers for Time-delayed Processes Emmanuel Edet Technology and Innovation Centre University of Strathclyde 99 George Street Glasgow, United Kingdom emmanuel.edet@strath.ac.uk
CM 3310 Process Control, Spring Lecture 21
 CM 331 Process Control, Spring 217 Instructor: Dr. om Co Lecture 21 (Back to Process Control opics ) General Control Configurations and Schemes. a) Basic Single-Input/Single-Output (SISO) Feedback Figure
CM 331 Process Control, Spring 217 Instructor: Dr. om Co Lecture 21 (Back to Process Control opics ) General Control Configurations and Schemes. a) Basic Single-Input/Single-Output (SISO) Feedback Figure
RELAY AUTOTUNING OF MULTIVARIABLE SYSTEMS: APPLICATION TO AN EXPERIMENTAL PILOT-SCALE DISTILLATION COLUMN
 Copyright 2002 IFAC 15th Triennial World Congress, Barcelona, Spain RELAY AUTOTUNING OF MULTIVARIABLE SYSTEMS: APPLICATION TO AN EXPERIMENTAL PILOT-SCALE DISTILLATION COLUMN G. Marchetti 1, C. Scali 1,
Copyright 2002 IFAC 15th Triennial World Congress, Barcelona, Spain RELAY AUTOTUNING OF MULTIVARIABLE SYSTEMS: APPLICATION TO AN EXPERIMENTAL PILOT-SCALE DISTILLATION COLUMN G. Marchetti 1, C. Scali 1,
Closed-loop system 2/1/2016. Generally MIMO case. Two-degrees-of-freedom (2 DOF) control structure. (2 DOF structure) The closed loop equations become
 control structure. (2 DOF structure) The closed loop equations become") Closed-loop system enerally MIMO case Two-degrees-of-freedom (2 DOF) control structure (2 DOF structure) 2 The closed loop equations become solving for z gives where is the closed loop transfer function
Closed-loop system enerally MIMO case Two-degrees-of-freedom (2 DOF) control structure (2 DOF structure) 2 The closed loop equations become solving for z gives where is the closed loop transfer function
Improved Autotuning Using the Shape Factor from Relay Feedback
 Article Subscriber access provided by NATIONAL TAIWAN UNIV Improved Autotuning Using the Shape Factor from Relay Feedback T. Thyagarajan, and Cheng-Ching Yu Ind. Eng. Chem. Res., 2003, 42 (20), 4425-4440
Article Subscriber access provided by NATIONAL TAIWAN UNIV Improved Autotuning Using the Shape Factor from Relay Feedback T. Thyagarajan, and Cheng-Ching Yu Ind. Eng. Chem. Res., 2003, 42 (20), 4425-4440
A Tuning of the Nonlinear PI Controller and Its Experimental Application
 Korean J. Chem. Eng., 18(4), 451-455 (2001) A Tuning of the Nonlinear PI Controller and Its Experimental Application Doe Gyoon Koo*, Jietae Lee*, Dong Kwon Lee**, Chonghun Han**, Lyu Sung Gyu, Jae Hak
Korean J. Chem. Eng., 18(4), 451-455 (2001) A Tuning of the Nonlinear PI Controller and Its Experimental Application Doe Gyoon Koo*, Jietae Lee*, Dong Kwon Lee**, Chonghun Han**, Lyu Sung Gyu, Jae Hak
DESPITE SEVERAL decades of industrial PID control
 1270 IEEE TRANSACTIONS ON CONTROL SYSTEMS TECHNOLOGY, VOL. 17, NO. 6, NOVEMBER 2009 Tuning of Multivariable Decentralized Controllers Through the Ultimate-Point Method Lucíola Campestrini, Luiz Carlos
1270 IEEE TRANSACTIONS ON CONTROL SYSTEMS TECHNOLOGY, VOL. 17, NO. 6, NOVEMBER 2009 Tuning of Multivariable Decentralized Controllers Through the Ultimate-Point Method Lucíola Campestrini, Luiz Carlos
Sequential Design Method for Multivariable Decoupling and Multiloop PID Controllers
 Ind. Eng. Chem. Res. 1998, 37, 107-119 107 Sequential Design Method for Multivariable Decoupling and Multiloop PID Controllers Shing-Jia Shiu and Shyh-Hong Hwang* Department of Chemical Engineering, National
Ind. Eng. Chem. Res. 1998, 37, 107-119 107 Sequential Design Method for Multivariable Decoupling and Multiloop PID Controllers Shing-Jia Shiu and Shyh-Hong Hwang* Department of Chemical Engineering, National
EI6801 Computer Control of Processes Dept. of EIE and ICE
 Unit I DISCRETE STATE-VARIABLE TECHNIQUE State equation of discrete data system with sample and hold State transition equation Methods of computing the state transition matrix Decomposition of discrete
Unit I DISCRETE STATE-VARIABLE TECHNIQUE State equation of discrete data system with sample and hold State transition equation Methods of computing the state transition matrix Decomposition of discrete
A New Internal Model Control Method for MIMO Over-Actuated Systems
 Vol. 7, No., 26 A New Internal Model Control Method for MIMO Over-Actuated Systems Ahmed Dhahri University of Tuins El Manar, National Engineering School of Tunis, Laboratory of research in Automatic Control,
Vol. 7, No., 26 A New Internal Model Control Method for MIMO Over-Actuated Systems Ahmed Dhahri University of Tuins El Manar, National Engineering School of Tunis, Laboratory of research in Automatic Control,
CBE495 LECTURE IV MODEL PREDICTIVE CONTROL
 What is Model Predictive Control (MPC)? CBE495 LECTURE IV MODEL PREDICTIVE CONTROL Professor Dae Ryook Yang Fall 2013 Dept. of Chemical and Biological Engineering Korea University * Some parts are from
What is Model Predictive Control (MPC)? CBE495 LECTURE IV MODEL PREDICTIVE CONTROL Professor Dae Ryook Yang Fall 2013 Dept. of Chemical and Biological Engineering Korea University * Some parts are from
CHAPTER 5 FREQUENCY STABILIZATION USING SUPERVISORY EXPERT FUZZY CONTROLLER
 85 CAPTER 5 FREQUENCY STABILIZATION USING SUPERVISORY EXPERT FUZZY CONTROLLER 5. INTRODUCTION The simulation studies presented in the earlier chapter are obviously proved that the design of a classical
85 CAPTER 5 FREQUENCY STABILIZATION USING SUPERVISORY EXPERT FUZZY CONTROLLER 5. INTRODUCTION The simulation studies presented in the earlier chapter are obviously proved that the design of a classical
Additional Closed-Loop Frequency Response Material (Second edition, Chapter 14)
") Appendix J Additional Closed-Loop Frequency Response Material (Second edition, Chapter 4) APPENDIX CONTENTS J. Closed-Loop Behavior J.2 Bode Stability Criterion J.3 Nyquist Stability Criterion J.4 Gain
Appendix J Additional Closed-Loop Frequency Response Material (Second edition, Chapter 4) APPENDIX CONTENTS J. Closed-Loop Behavior J.2 Bode Stability Criterion J.3 Nyquist Stability Criterion J.4 Gain
Design of Multivariable Neural Controllers Using a Classical Approach
 Design of Multivariable Neural Controllers Using a Classical Approach Seshu K. Damarla & Madhusree Kundu Abstract In the present study, the neural network (NN) based multivariable controllers were designed
Design of Multivariable Neural Controllers Using a Classical Approach Seshu K. Damarla & Madhusree Kundu Abstract In the present study, the neural network (NN) based multivariable controllers were designed
Iterative Feedback Tuning
 Iterative Feedback Tuning Michel Gevers CESAME - UCL Louvain-la-Neuve Belgium Collaboration : H. Hjalmarsson, S. Gunnarsson, O. Lequin, E. Bosmans, L. Triest, M. Mossberg Outline Problem formulation Iterative
Iterative Feedback Tuning Michel Gevers CESAME - UCL Louvain-la-Neuve Belgium Collaboration : H. Hjalmarsson, S. Gunnarsson, O. Lequin, E. Bosmans, L. Triest, M. Mossberg Outline Problem formulation Iterative
GAIN SCHEDULING CONTROL WITH MULTI-LOOP PID FOR 2- DOF ARM ROBOT TRAJECTORY CONTROL
 GAIN SCHEDULING CONTROL WITH MULTI-LOOP PID FOR 2- DOF ARM ROBOT TRAJECTORY CONTROL 1 KHALED M. HELAL, 2 MOSTAFA R.A. ATIA, 3 MOHAMED I. ABU EL-SEBAH 1, 2 Mechanical Engineering Department ARAB ACADEMY
GAIN SCHEDULING CONTROL WITH MULTI-LOOP PID FOR 2- DOF ARM ROBOT TRAJECTORY CONTROL 1 KHALED M. HELAL, 2 MOSTAFA R.A. ATIA, 3 MOHAMED I. ABU EL-SEBAH 1, 2 Mechanical Engineering Department ARAB ACADEMY
NonlinearControlofpHSystemforChangeOverTitrationCurve
 D. SWATI et al., Nonlinear Control of ph System for Change Over Titration Curve, Chem. Biochem. Eng. Q. 19 (4) 341 349 (2005) 341 NonlinearControlofpHSystemforChangeOverTitrationCurve D. Swati, V. S. R.
D. SWATI et al., Nonlinear Control of ph System for Change Over Titration Curve, Chem. Biochem. Eng. Q. 19 (4) 341 349 (2005) 341 NonlinearControlofpHSystemforChangeOverTitrationCurve D. Swati, V. S. R.
An Improved Relay Auto Tuning of PID Controllers for SOPTD Systems
 Proceedings of the World Congress on Engineering and Computer Science 7 WCECS 7, October 4-6, 7, San Francisco, USA An Improved Relay Auto Tuning of PID Controllers for SOPTD Systems Sathe Vivek and M.
Proceedings of the World Congress on Engineering and Computer Science 7 WCECS 7, October 4-6, 7, San Francisco, USA An Improved Relay Auto Tuning of PID Controllers for SOPTD Systems Sathe Vivek and M.
7.2 Controller tuning from specified characteristic polynomial
 192 Finn Haugen: PID Control 7.2 Controller tuning from specified characteristic polynomial 7.2.1 Introduction The subsequent sections explain controller tuning based on specifications of the characteristic
192 Finn Haugen: PID Control 7.2 Controller tuning from specified characteristic polynomial 7.2.1 Introduction The subsequent sections explain controller tuning based on specifications of the characteristic
DESIGN OF PI CONTROLLERS FOR MIMO SYSTEM WITH DECOUPLERS
 Int. J. Chem. Sci.: 4(3), 6, 598-6 ISSN 97-768X www.sadurupublications.com DESIGN OF PI CONTROLLERS FOR MIMO SYSTEM WITH DECOUPLERS A. ILAKKIYA, S. DIVYA and M. MANNIMOZHI * School of Electrical Enineerin,
Int. J. Chem. Sci.: 4(3), 6, 598-6 ISSN 97-768X www.sadurupublications.com DESIGN OF PI CONTROLLERS FOR MIMO SYSTEM WITH DECOUPLERS A. ILAKKIYA, S. DIVYA and M. MANNIMOZHI * School of Electrical Enineerin,
Control System Design
 ELEC ENG 4CL4: Control System Design Notes for Lecture #15 Friday, February 6, 2004 Dr. Ian C. Bruce Room: CRL-229 Phone ext.: 26984 Email: ibruce@mail.ece.mcmaster.ca (3) Cohen-Coon Reaction Curve Method
ELEC ENG 4CL4: Control System Design Notes for Lecture #15 Friday, February 6, 2004 Dr. Ian C. Bruce Room: CRL-229 Phone ext.: 26984 Email: ibruce@mail.ece.mcmaster.ca (3) Cohen-Coon Reaction Curve Method
Process Control Hardware Fundamentals
 Unit-1: Process Control Process Control Hardware Fundamentals In order to analyse a control system, the individual components that make up the system must be understood. Only with this understanding can
Unit-1: Process Control Process Control Hardware Fundamentals In order to analyse a control system, the individual components that make up the system must be understood. Only with this understanding can
CONTROL OF MULTIVARIABLE PROCESSES
 Process plants ( or complex experiments) have many variables that must be controlled. The engineer must. Provide the needed sensors 2. Provide adequate manipulated variables 3. Decide how the CVs and MVs
Process plants ( or complex experiments) have many variables that must be controlled. The engineer must. Provide the needed sensors 2. Provide adequate manipulated variables 3. Decide how the CVs and MVs
IMC based automatic tuning method for PID controllers in a Smith predictor configuration
 Computers and Chemical Engineering 28 (2004) 281 290 IMC based automatic tuning method for PID controllers in a Smith predictor configuration Ibrahim Kaya Department of Electrical and Electronics Engineering,
Computers and Chemical Engineering 28 (2004) 281 290 IMC based automatic tuning method for PID controllers in a Smith predictor configuration Ibrahim Kaya Department of Electrical and Electronics Engineering,
Simulation of Quadruple Tank Process for Liquid Level Control
 Simulation of Quadruple Tank Process for Liquid Level Control Ritika Thusoo 1, Sakshi Bangia 2 1 M.Tech Student, Electronics Engg, Department, YMCA University of Science and Technology, Faridabad 2 Assistant
Simulation of Quadruple Tank Process for Liquid Level Control Ritika Thusoo 1, Sakshi Bangia 2 1 M.Tech Student, Electronics Engg, Department, YMCA University of Science and Technology, Faridabad 2 Assistant
ISA Transactions ( ) Contents lists available at ScienceDirect. ISA Transactions. journal homepage:
 Contents lists available at ScienceDirect. ISA Transactions. journal homepage:") ISA Transactions ( ) Contents lists available at ScienceDirect ISA Transactions journal homepage: www.elsevier.com/locate/isatrans An improved auto-tuning scheme for PID controllers Chanchal Dey a, Rajani
ISA Transactions ( ) Contents lists available at ScienceDirect ISA Transactions journal homepage: www.elsevier.com/locate/isatrans An improved auto-tuning scheme for PID controllers Chanchal Dey a, Rajani
Dynamic Modeling, Simulation and Control of MIMO Systems
 Dynamic Modeling, Simulation and Control of MIMO Systems M.Bharathi, C.Selvakumar HOD, Department of Electronics And Instrumentation, Bharath University Chennai 600073, India Prof & Head, St.Joseph s College
Dynamic Modeling, Simulation and Control of MIMO Systems M.Bharathi, C.Selvakumar HOD, Department of Electronics And Instrumentation, Bharath University Chennai 600073, India Prof & Head, St.Joseph s College
Principles and Practice of Automatic Process Control
 Principles and Practice of Automatic Process Control Third Edition Carlos A. Smith, Ph.D., P.E. Department of Chemical Engineering University of South Florida Armando B. Corripio, Ph.D., P.E. Gordon A.
Principles and Practice of Automatic Process Control Third Edition Carlos A. Smith, Ph.D., P.E. Department of Chemical Engineering University of South Florida Armando B. Corripio, Ph.D., P.E. Gordon A.
CHAPTER 7 MODELING AND CONTROL OF SPHERICAL TANK LEVEL PROCESS 7.1 INTRODUCTION
 141 CHAPTER 7 MODELING AND CONTROL OF SPHERICAL TANK LEVEL PROCESS 7.1 INTRODUCTION In most of the industrial processes like a water treatment plant, paper making industries, petrochemical industries,
141 CHAPTER 7 MODELING AND CONTROL OF SPHERICAL TANK LEVEL PROCESS 7.1 INTRODUCTION In most of the industrial processes like a water treatment plant, paper making industries, petrochemical industries,
Computation of Stabilizing PI and PID parameters for multivariable system with time delays
 Computation of Stabilizing PI and PID parameters for multivariable system with time delays Nour El Houda Mansour, Sami Hafsi, Kaouther Laabidi Laboratoire d Analyse, Conception et Commande des Systèmes
Computation of Stabilizing PI and PID parameters for multivariable system with time delays Nour El Houda Mansour, Sami Hafsi, Kaouther Laabidi Laboratoire d Analyse, Conception et Commande des Systèmes
Simulation based Modeling and Implementation of Adaptive Control Technique for Non Linear Process Tank
 Simulation based Modeling and Implementation of Adaptive Control Technique for Non Linear Process Tank P.Aravind PG Scholar, Department of Control and Instrumentation Engineering, JJ College of Engineering
Simulation based Modeling and Implementation of Adaptive Control Technique for Non Linear Process Tank P.Aravind PG Scholar, Department of Control and Instrumentation Engineering, JJ College of Engineering
Model Predictive Controller of Boost Converter with RLE Load
 Model Predictive Controller of Boost Converter with RLE Load N. Murali K.V.Shriram S.Muthukumar Nizwa College of Vellore Institute of Nizwa College of Technology Technology University Technology Ministry
Model Predictive Controller of Boost Converter with RLE Load N. Murali K.V.Shriram S.Muthukumar Nizwa College of Vellore Institute of Nizwa College of Technology Technology University Technology Ministry
K c < K u K c = K u K c > K u step 4 Calculate and implement PID parameters using the the Ziegler-Nichols tuning tables: 30
 1.5 QUANTITIVE PID TUNING METHODS Tuning PID parameters is not a trivial task in general. Various tuning methods have been proposed for dierent model descriptions and performance criteria. 1.5.1 CONTINUOUS
1.5 QUANTITIVE PID TUNING METHODS Tuning PID parameters is not a trivial task in general. Various tuning methods have been proposed for dierent model descriptions and performance criteria. 1.5.1 CONTINUOUS
Chapter 5 The SIMC Method for Smooth PID Controller Tuning
 Chapter 5 The SIMC Method for Smooth PID Controller Tuning Sigurd Skogestad and Chriss Grimholt 5.1 Introduction Although the proportional-integral-derivative (PID) controller has only three parameters,
Chapter 5 The SIMC Method for Smooth PID Controller Tuning Sigurd Skogestad and Chriss Grimholt 5.1 Introduction Although the proportional-integral-derivative (PID) controller has only three parameters,
Chapter 2. Classical Control System Design. Dutch Institute of Systems and Control
 Chapter 2 Classical Control System Design Overview Ch. 2. 2. Classical control system design Introduction Introduction Steady-state Steady-state errors errors Type Type k k systems systems Integral Integral
Chapter 2 Classical Control System Design Overview Ch. 2. 2. Classical control system design Introduction Introduction Steady-state Steady-state errors errors Type Type k k systems systems Integral Integral
Process Unit Control System Design
 Process Unit Control System Design 1. Introduction 2. Influence of process design 3. Control degrees of freedom 4. Selection of control system variables 5. Process safety Introduction Control system requirements»
Process Unit Control System Design 1. Introduction 2. Influence of process design 3. Control degrees of freedom 4. Selection of control system variables 5. Process safety Introduction Control system requirements»
PROPORTIONAL-Integral-Derivative (PID) controllers
 controllers") Multiple Model and Neural based Adaptive Multi-loop PID Controller for a CSTR Process R.Vinodha S. Abraham Lincoln and J. Prakash Abstract Multi-loop (De-centralized) Proportional-Integral- Derivative
Multiple Model and Neural based Adaptive Multi-loop PID Controller for a CSTR Process R.Vinodha S. Abraham Lincoln and J. Prakash Abstract Multi-loop (De-centralized) Proportional-Integral- Derivative
EXPERIMENTAL IMPLEMENTATION OF CDM BASED TWO MODE CONTROLLER FOR AN INTERACTING 2*2 DISTILLATION PROCESS
 Volume 118 No. 18 2018, 2241-2251 ISSN: 1311-8080 (printed version); ISSN: 1314-3395 (on-line version) url: http://www.ijpam.eu ijpam.eu EXPERIMENTAL IMPLEMENTATION OF CDM BASED TWO MODE CONTROLLER FOR
Volume 118 No. 18 2018, 2241-2251 ISSN: 1311-8080 (printed version); ISSN: 1314-3395 (on-line version) url: http://www.ijpam.eu ijpam.eu EXPERIMENTAL IMPLEMENTATION OF CDM BASED TWO MODE CONTROLLER FOR
Improve Performance of Multivariable Robust Control in Boiler System
 Canadian Journal on Automation, Control & Intelligent Systems Vol. No. 4, June Improve Performance of Multivariable Robust Control in Boiler System Mehdi Parsa, Ali Vahidian Kamyad and M. Bagher Naghibi
Canadian Journal on Automation, Control & Intelligent Systems Vol. No. 4, June Improve Performance of Multivariable Robust Control in Boiler System Mehdi Parsa, Ali Vahidian Kamyad and M. Bagher Naghibi
Cascade Control of a Continuous Stirred Tank Reactor (CSTR)
") Journal of Applied and Industrial Sciences, 213, 1 (4): 16-23, ISSN: 2328-4595 (PRINT), ISSN: 2328-469 (ONLINE) Research Article Cascade Control of a Continuous Stirred Tank Reactor (CSTR) 16 A. O. Ahmed
Journal of Applied and Industrial Sciences, 213, 1 (4): 16-23, ISSN: 2328-4595 (PRINT), ISSN: 2328-469 (ONLINE) Research Article Cascade Control of a Continuous Stirred Tank Reactor (CSTR) 16 A. O. Ahmed
Control System Design
 ELEC ENG 4CL4: Control System Design Notes for Lecture #13 Monday, February 3, 2003 Dr. Ian C. Bruce Room: CRL-229 Phone ext.: 26984 Email: ibruce@mail.ece.mcmaster.ca (3) Cohen-Coon Reaction Curve Method
ELEC ENG 4CL4: Control System Design Notes for Lecture #13 Monday, February 3, 2003 Dr. Ian C. Bruce Room: CRL-229 Phone ext.: 26984 Email: ibruce@mail.ece.mcmaster.ca (3) Cohen-Coon Reaction Curve Method
Linear State Feedback Controller Design
 Assignment For EE5101 - Linear Systems Sem I AY2010/2011 Linear State Feedback Controller Design Phang Swee King A0033585A Email: king@nus.edu.sg NGS/ECE Dept. Faculty of Engineering National University
Assignment For EE5101 - Linear Systems Sem I AY2010/2011 Linear State Feedback Controller Design Phang Swee King A0033585A Email: king@nus.edu.sg NGS/ECE Dept. Faculty of Engineering National University
A Method for PID Controller Tuning Using Nonlinear Control Techniques*
 A Method for PID Controller Tuning Using Nonlinear Control Techniques* Prashant Mhaskar, Nael H. El-Farra and Panagiotis D. Christofides Department of Chemical Engineering University of California, Los
A Method for PID Controller Tuning Using Nonlinear Control Techniques* Prashant Mhaskar, Nael H. El-Farra and Panagiotis D. Christofides Department of Chemical Engineering University of California, Los
arxiv: v1 [cs.sy] 30 Nov 2017
![arxiv: v1 [cs.sy] 30 Nov 2017](/thumbs/81/83185989.jpg "arxiv: v1 [cs.sy] 30 Nov 2017") Disturbance Observer based Control of Integrating Processes with Dead-Time using PD controller Sujay D. Kadam SysIDEA Lab, IIT Gandhinagar, India. arxiv:1711.11250v1 [cs.sy] 30 Nov 2017 Abstract The work
Disturbance Observer based Control of Integrating Processes with Dead-Time using PD controller Sujay D. Kadam SysIDEA Lab, IIT Gandhinagar, India. arxiv:1711.11250v1 [cs.sy] 30 Nov 2017 Abstract The work
Process Modelling, Identification, and Control
 Jan Mikles Miroslav Fikar 2008 AGI-Information Management Consultants May be used for personal purporses only or by libraries associated to dandelon.com network. Process Modelling, Identification, and
Jan Mikles Miroslav Fikar 2008 AGI-Information Management Consultants May be used for personal purporses only or by libraries associated to dandelon.com network. Process Modelling, Identification, and
Introduction to. Process Control. Ahmet Palazoglu. Second Edition. Jose A. Romagnoli. CRC Press. Taylor & Francis Group. Taylor & Francis Group,
 Introduction to Process Control Second Edition Jose A. Romagnoli Ahmet Palazoglu CRC Press Taylor & Francis Group Boca Raton London NewYork CRC Press is an imprint of the Taylor & Francis Group, an informa
Introduction to Process Control Second Edition Jose A. Romagnoli Ahmet Palazoglu CRC Press Taylor & Francis Group Boca Raton London NewYork CRC Press is an imprint of the Taylor & Francis Group, an informa
FUZZY CONTROL CONVENTIONAL CONTROL CONVENTIONAL CONTROL CONVENTIONAL CONTROL CONVENTIONAL CONTROL CONVENTIONAL CONTROL
 Eample: design a cruise control system After gaining an intuitive understanding of the plant s dynamics and establishing the design objectives, the control engineer typically solves the cruise control
Eample: design a cruise control system After gaining an intuitive understanding of the plant s dynamics and establishing the design objectives, the control engineer typically solves the cruise control
Gain Scheduling Control with Multi-loop PID for 2-DOF Arm Robot Trajectory Control
 Gain Scheduling Control with Multi-loop PID for 2-DOF Arm Robot Trajectory Control Khaled M. Helal, 2 Mostafa R.A. Atia, 3 Mohamed I. Abu El-Sebah, 2 Mechanical Engineering Department ARAB ACADEMY FOR
Gain Scheduling Control with Multi-loop PID for 2-DOF Arm Robot Trajectory Control Khaled M. Helal, 2 Mostafa R.A. Atia, 3 Mohamed I. Abu El-Sebah, 2 Mechanical Engineering Department ARAB ACADEMY FOR
Professional Portfolio Selection Techniques: From Markowitz to Innovative Engineering
 Massachusetts Institute of Technology Sponsor: Electrical Engineering and Computer Science Cosponsor: Science Engineering and Business Club Professional Portfolio Selection Techniques: From Markowitz to
Massachusetts Institute of Technology Sponsor: Electrical Engineering and Computer Science Cosponsor: Science Engineering and Business Club Professional Portfolio Selection Techniques: From Markowitz to
CHAPTER 7 FRACTIONAL ORDER SYSTEMS WITH FRACTIONAL ORDER CONTROLLERS
 9 CHAPTER 7 FRACTIONAL ORDER SYSTEMS WITH FRACTIONAL ORDER CONTROLLERS 7. FRACTIONAL ORDER SYSTEMS Fractional derivatives provide an excellent instrument for the description of memory and hereditary properties
9 CHAPTER 7 FRACTIONAL ORDER SYSTEMS WITH FRACTIONAL ORDER CONTROLLERS 7. FRACTIONAL ORDER SYSTEMS Fractional derivatives provide an excellent instrument for the description of memory and hereditary properties
THE DOS AND DON TS OF DISTILLATION COLUMN CONTROL
 THE DOS AND DON TS OF DISTILLATION COLUMN CONTROL Sigurd Skogestad Department of Chemical Engineering, Norwegian University of Science and Technology, N-7491 Trondheim, Norway The paper discusses distillation
THE DOS AND DON TS OF DISTILLATION COLUMN CONTROL Sigurd Skogestad Department of Chemical Engineering, Norwegian University of Science and Technology, N-7491 Trondheim, Norway The paper discusses distillation
A unified double-loop multi-scale control strategy for NMP integrating-unstable systems
 Home Search Collections Journals About Contact us My IOPscience A unified double-loop multi-scale control strategy for NMP integrating-unstable systems This content has been downloaded from IOPscience.
Home Search Collections Journals About Contact us My IOPscience A unified double-loop multi-scale control strategy for NMP integrating-unstable systems This content has been downloaded from IOPscience.
Intermediate Process Control CHE576 Lecture Notes # 2
 Intermediate Process Control CHE576 Lecture Notes # 2 B. Huang Department of Chemical & Materials Engineering University of Alberta, Edmonton, Alberta, Canada February 4, 2008 2 Chapter 2 Introduction
Intermediate Process Control CHE576 Lecture Notes # 2 B. Huang Department of Chemical & Materials Engineering University of Alberta, Edmonton, Alberta, Canada February 4, 2008 2 Chapter 2 Introduction
The dos and don ts of distillation column control
 The dos and don ts of distillation column control Sigurd Skogestad * Department of Chemical Engineering Norwegian University of Science and Technology N-7491 Trondheim, Norway Abstract The paper discusses
The dos and don ts of distillation column control Sigurd Skogestad * Department of Chemical Engineering Norwegian University of Science and Technology N-7491 Trondheim, Norway Abstract The paper discusses
Multivariable Control Laboratory experiment 2 The Quadruple Tank 1
 Multivariable Control Laboratory experiment 2 The Quadruple Tank 1 Department of Automatic Control Lund Institute of Technology 1. Introduction The aim of this laboratory exercise is to study some different
Multivariable Control Laboratory experiment 2 The Quadruple Tank 1 Department of Automatic Control Lund Institute of Technology 1. Introduction The aim of this laboratory exercise is to study some different
A PSO Approach for Optimum Design of Multivariable PID Controller for nonlinear systems
 A PSO Approach for Optimum Design of Multivariable PID Controller for nonlinear systems Taeib Adel Email: taeibadel@live.fr Ltaeif Ali Email: ltaief24@yahoo.fr Chaari Abdelkader Email: nabile.chaari@yahoo.fr
A PSO Approach for Optimum Design of Multivariable PID Controller for nonlinear systems Taeib Adel Email: taeibadel@live.fr Ltaeif Ali Email: ltaief24@yahoo.fr Chaari Abdelkader Email: nabile.chaari@yahoo.fr
Laboratory Exercise 1 DC servo
 Laboratory Exercise DC servo Per-Olof Källén ø 0,8 POWER SAT. OVL.RESET POS.RESET Moment Reference ø 0,5 ø 0,5 ø 0,5 ø 0,65 ø 0,65 Int ø 0,8 ø 0,8 Σ k Js + d ø 0,8 s ø 0 8 Off Off ø 0,8 Ext. Int. + x0,
Laboratory Exercise DC servo Per-Olof Källén ø 0,8 POWER SAT. OVL.RESET POS.RESET Moment Reference ø 0,5 ø 0,5 ø 0,5 ø 0,65 ø 0,65 Int ø 0,8 ø 0,8 Σ k Js + d ø 0,8 s ø 0 8 Off Off ø 0,8 Ext. Int. + x0,
Open Loop Tuning Rules
 Open Loop Tuning Rules Based on approximate process models Process Reaction Curve: The process reaction curve is an approximate model of the process, assuming the process behaves as a first order plus
Open Loop Tuning Rules Based on approximate process models Process Reaction Curve: The process reaction curve is an approximate model of the process, assuming the process behaves as a first order plus
Design and Implementation of Controllers for a CSTR Process
 Design and Implementation of Controllers for a CSTR Process Eng. Muyizere Darius, Dr. S. Sivagamasundari Dept. of M.Sc (EI), Annamalai University, Cuddalore. Abstract Continuous Stirred Tank Reactor (CSTR)
Design and Implementation of Controllers for a CSTR Process Eng. Muyizere Darius, Dr. S. Sivagamasundari Dept. of M.Sc (EI), Annamalai University, Cuddalore. Abstract Continuous Stirred Tank Reactor (CSTR)
ECE 388 Automatic Control
 Lead Compensator and PID Control Associate Prof. Dr. of Mechatronics Engineeering Çankaya University Compulsory Course in Electronic and Communication Engineering Credits (2/2/3) Course Webpage: http://ece388.cankaya.edu.tr
Lead Compensator and PID Control Associate Prof. Dr. of Mechatronics Engineeering Çankaya University Compulsory Course in Electronic and Communication Engineering Credits (2/2/3) Course Webpage: http://ece388.cankaya.edu.tr
World Journal of Engineering Research and Technology WJERT
 wjert, 218, Vol. 4, Issue 1, 165-175. Original Article ISSN 2454-695X Pandimadevi et al. WJERT www.wjert.org SJIF Impact Factor: 4.326 DESIGN OF PI CONTROLLER FOR A CONICAL TANK SYSTEM *G. Pandimadevi
wjert, 218, Vol. 4, Issue 1, 165-175. Original Article ISSN 2454-695X Pandimadevi et al. WJERT www.wjert.org SJIF Impact Factor: 4.326 DESIGN OF PI CONTROLLER FOR A CONICAL TANK SYSTEM *G. Pandimadevi
Design and Implementation of Sliding Mode Controller using Coefficient Diagram Method for a nonlinear process
 IOSR Journal of Electrical and Electronics Engineering (IOSR-JEEE) e-issn: 2278-1676,p-ISSN: 2320-3331, Volume 7, Issue 5 (Sep. - Oct. 2013), PP 19-24 Design and Implementation of Sliding Mode Controller
IOSR Journal of Electrical and Electronics Engineering (IOSR-JEEE) e-issn: 2278-1676,p-ISSN: 2320-3331, Volume 7, Issue 5 (Sep. - Oct. 2013), PP 19-24 Design and Implementation of Sliding Mode Controller
Tuning Rules for Proportional Resonant Controllers
 Tuning Rules for Proportional Resonant Controllers Luís Fernando Alves Pereira and Alexandre Sanfelice Bazanella, Senior Member, IEEE Abstract In this paper we propose a particular structure for resonant
Tuning Rules for Proportional Resonant Controllers Luís Fernando Alves Pereira and Alexandre Sanfelice Bazanella, Senior Member, IEEE Abstract In this paper we propose a particular structure for resonant
A Simple PID Control Design for Systems with Time Delay
 Industrial Electrical Engineering and Automation CODEN:LUTEDX/(TEIE-7266)/1-16/(2017) A Simple PID Control Design for Systems with Time Delay Mats Lilja Division of Industrial Electrical Engineering and
Industrial Electrical Engineering and Automation CODEN:LUTEDX/(TEIE-7266)/1-16/(2017) A Simple PID Control Design for Systems with Time Delay Mats Lilja Division of Industrial Electrical Engineering and
The output voltage is given by,
 71 The output voltage is given by, = (3.1) The inductor and capacitor values of the Boost converter are derived by having the same assumption as that of the Buck converter. Now the critical value of the
71 The output voltage is given by, = (3.1) The inductor and capacitor values of the Boost converter are derived by having the same assumption as that of the Buck converter. Now the critical value of the
Robust control for a multi-stage evaporation plant in the presence of uncertainties
 Preprint 11th IFAC Symposium on Dynamics and Control of Process Systems including Biosystems June 6-8 16. NTNU Trondheim Norway Robust control for a multi-stage evaporation plant in the presence of uncertainties
Preprint 11th IFAC Symposium on Dynamics and Control of Process Systems including Biosystems June 6-8 16. NTNU Trondheim Norway Robust control for a multi-stage evaporation plant in the presence of uncertainties
YTÜ Mechanical Engineering Department
 YTÜ Mechanical Engineering Department Lecture of Special Laboratory of Machine Theory, System Dynamics and Control Division Coupled Tank 1 Level Control with using Feedforward PI Controller Lab Date: Lab
YTÜ Mechanical Engineering Department Lecture of Special Laboratory of Machine Theory, System Dynamics and Control Division Coupled Tank 1 Level Control with using Feedforward PI Controller Lab Date: Lab
A robust Multi-Loop tuning Procedure based at Succsessive Semidefinite Programming, that achieves optimal Performance and Failure Tolerance
 A robust Multi-Loop tuning Procedure based at Succsessive Semidefinite Programming, that achieves optimal Performance and Failure Tolerance Henrik Helgesen Master of Science in Engineering Cybernetics
A robust Multi-Loop tuning Procedure based at Succsessive Semidefinite Programming, that achieves optimal Performance and Failure Tolerance Henrik Helgesen Master of Science in Engineering Cybernetics
Chapter 8. Feedback Controllers. Figure 8.1 Schematic diagram for a stirred-tank blending system.
 Feedback Controllers Figure 8.1 Schematic diagram for a stirred-tank blending system. 1 Basic Control Modes Next we consider the three basic control modes starting with the simplest mode, proportional
Feedback Controllers Figure 8.1 Schematic diagram for a stirred-tank blending system. 1 Basic Control Modes Next we consider the three basic control modes starting with the simplest mode, proportional
Chapter Robust Performance and Introduction to the Structured Singular Value Function Introduction As discussed in Lecture 0, a process is better desc
 Lectures on Dynamic Systems and Control Mohammed Dahleh Munther A Dahleh George Verghese Department of Electrical Engineering and Computer Science Massachuasetts Institute of Technology c Chapter Robust
Lectures on Dynamic Systems and Control Mohammed Dahleh Munther A Dahleh George Verghese Department of Electrical Engineering and Computer Science Massachuasetts Institute of Technology c Chapter Robust
Fuzzy Control of a Multivariable Nonlinear Process
 Fuzzy Control of a Multivariable Nonlinear Process A. Iriarte Lanas 1, G. L.A. Mota 1, R. Tanscheit 1, M.M. Vellasco 1, J.M.Barreto 2 1 DEE-PUC-Rio, CP 38.063, 22452-970 Rio de Janeiro - RJ, Brazil e-mail:
Fuzzy Control of a Multivariable Nonlinear Process A. Iriarte Lanas 1, G. L.A. Mota 1, R. Tanscheit 1, M.M. Vellasco 1, J.M.Barreto 2 1 DEE-PUC-Rio, CP 38.063, 22452-970 Rio de Janeiro - RJ, Brazil e-mail:
Control 2. Proportional and Integral control
 Control 2 Proportional and Integral control 1 Disturbance rejection in Proportional Control Θ i =5 + _ Controller K P =20 Motor K=2.45 Θ o Consider first the case where the motor steadystate gain = 2.45
Control 2 Proportional and Integral control 1 Disturbance rejection in Proportional Control Θ i =5 + _ Controller K P =20 Motor K=2.45 Θ o Consider first the case where the motor steadystate gain = 2.45
Parameter Estimation of Single and Decentralized Control Systems Using Pulse Response Data
 Parameter Estimation of Single and Decentralized Control Systems Bull. Korean Chem. Soc. 003, Vol. 4, No. 3 79 Parameter Estimation of Single and Decentralized Control Systems Using Pulse Response Data
Parameter Estimation of Single and Decentralized Control Systems Bull. Korean Chem. Soc. 003, Vol. 4, No. 3 79 Parameter Estimation of Single and Decentralized Control Systems Using Pulse Response Data
Design and Comparative Analysis of Controller for Non Linear Tank System
 Design and Comparative Analysis of for Non Linear Tank System Janaki.M 1, Soniya.V 2, Arunkumar.E 3 12 Assistant professor, Department of EIE, Karpagam College of Engineering, Coimbatore, India 3 Associate
Design and Comparative Analysis of for Non Linear Tank System Janaki.M 1, Soniya.V 2, Arunkumar.E 3 12 Assistant professor, Department of EIE, Karpagam College of Engineering, Coimbatore, India 3 Associate
Improving a Heart Rate Controller for a Cardiac Pacemaker. Connor Morrow
 Improving a Heart Rate Controller for a Cardiac Pacemaker Connor Morrow 03/13/2018 1 In the paper Intelligent Heart Rate Controller for a Cardiac Pacemaker, J. Yadav, A. Rani, and G. Garg detail different
Improving a Heart Rate Controller for a Cardiac Pacemaker Connor Morrow 03/13/2018 1 In the paper Intelligent Heart Rate Controller for a Cardiac Pacemaker, J. Yadav, A. Rani, and G. Garg detail different
PID control of FOPDT plants with dominant dead time based on the modulus optimum criterion
 Archives of Control Sciences Volume 6LXII, 016 No. 1, pages 5 17 PID control of FOPDT plants with dominant dead time based on the modulus optimum criterion JAN CVEJN The modulus optimum MO criterion can
Archives of Control Sciences Volume 6LXII, 016 No. 1, pages 5 17 PID control of FOPDT plants with dominant dead time based on the modulus optimum criterion JAN CVEJN The modulus optimum MO criterion can
Comparative analysis of decoupling control methodologies and multivariable robust control for VS-VP wind turbines
 Comparative analysis of decoupling control methodologies and multivariable robust control for VS-VP wind turbines Sergio Fragoso, Juan Garrido, Francisco Vázquez Department of Computer Science and Numerical
Comparative analysis of decoupling control methodologies and multivariable robust control for VS-VP wind turbines Sergio Fragoso, Juan Garrido, Francisco Vázquez Department of Computer Science and Numerical
The dos and don ts of distillation column control
 The dos and don ts of distillation column control Sigurd Skogestad * Department of Chemical Engineering Norwegian University of Science and Technology N-7491 Trondheim, Norway Abstract The paper discusses
The dos and don ts of distillation column control Sigurd Skogestad * Department of Chemical Engineering Norwegian University of Science and Technology N-7491 Trondheim, Norway Abstract The paper discusses
1 Loop Control. 1.1 Open-loop. ISS0065 Control Instrumentation
 Lecture 4 ISS0065 Control Instrumentation 1 Loop Control System has a continuous signal (analog) basic notions: open-loop control, close-loop control. 1.1 Open-loop Open-loop / avatud süsteem / открытая
Lecture 4 ISS0065 Control Instrumentation 1 Loop Control System has a continuous signal (analog) basic notions: open-loop control, close-loop control. 1.1 Open-loop Open-loop / avatud süsteem / открытая