Gain Scheduled Automatic Flight Control Systems Design for a Light Commercial Helicopter Model
|
|
|
- Marsha Cook
- 6 years ago
- Views:
Transcription
1 Erkan Abdulhaitbilal, Elbrous M. Jafarov Gain Scheduled Autoatic Flight Control Systes Design for a Light Coercial Helicopter Model Erkan ADULHAMITILAL and Elbrous M. JAFAROV Faculty of Aeronautics and Astronautics Istanbul Technical University Turkey abdulhaitbilal@gail.co, cafer@itu.edu.tr Abstract: - In this paper, nonlinear rigid body dynaics for rotorcraft atheatical odel is studied. A linearization of helicopter flight dynaics is evaluated. Autoatic Flight Control Syste (AFCS) with gain scheduled LQ optial control is designed based on look-up tables. Stability analyses are perfored and results are illustrated graphically for open and closed-loop systes. As seen fro results, LQ optial control syste pushes eigenvalues to left side of iaginary axis without excessive control inputs to aintain stability of naturally unstable rotorcraft dynaics. Proposed AFCS is tested by nonlinear flight dynaics odel in Matlab- Siulink environent. Siulation results illustrate effectiveness of evaluated ethod and techniques. Key-Words: - helicopter, flight dynaics, nonlinear odel, siulation, 1 Introduction Autoatic Flight Control Systes (AFCSs) are electro-hydro echanical systes that provide inputs to the control surfaces or eleents to assist the pilot in aneuvering and handling the aircraft in desired flight conditions. The AFCSs provide both oscillation daping (dynaic stability) and aintain desired flight attitude, speed and heading (static stability). Major coponents of the AFCSs are stick, collective and pedals position sensors, servo acceleroeters, flight control panel, flight coputer, rate gyros, air data and speed transducers, etc. In control theory, gain scheduling is an approach to control of non-linear systes that uses a set of linear controllers, which provides satisfactory control for a different operating point of the syste. Scheduling variables are used to deterine the operating region of the syste and to enable the appropriate linear controller. In aircrafts, AFCSs have altitude and Mach nuber (or forward speed) as scheduling variables with different linear controller paraeters available as look-up tables for various cobinations of those two variables. A full nonlinear atheatical odel of helicopter dynaics of prototyped helicopter with tri, perforance and linearization analyses, huan pilot analysis, and AFCS design is studied in [1]. Design handbook of the flexible rotor used in the prototype helicopter is given in [2]. Siilarly full nonlinear rotorcraft dynaics odel of Sikorsky UH-6A is studied in [3]. On the other hand, gain scheduled control syste for the odeled prototype helicopter is evaluated in [4]. Siilarly reconfigurable control for a tande helicopter is investigated in [5]. Autoatic flight control systes and flight dynaic are studied in [6-7]. Optial control theory is evaluated in [8]. Gain scheduling theory and applications are studied in [9]. Helicopter flight dynaics and theory is researched in [1-12]. Soe rotorcraft control systes such as state feedback and robust control are designed in [13-16]. Fuzzy and classical control approaches are applied to the proble in [17-18]. The significance of this paper is evaluation of the proble fro beginning to the end which eans odeling the rotorcraft dynaics, calculation of corresponding stability and control derivatives, design of control syste for a flight envelope and siulation of control syste with nonlinear flight dynaics. In this paper, we will first study nonlinear rotorcraft equation of otion. Rotor dynaics and aerodynaics is not evaluated, but referred fro [1] because these are hard to study in this paper. Then, we will linearize rotorcraft flight dynaics near a tri condition and propose a gain scheduled LQ optial control law to be integrated in AFCS. We are going to perfor all siulations with Matlab- Siulink on nonlinear flight dynaics odel given at the end of the paper. ISSN: Issue 12, Volue 6, Deceber 211
 - Istanbul Technical University (ITU)")
2 Erkan Abdulhaitbilal, Elbrous M. Jafarov 2 Proble Forulation In this paper, we have considered a prototype helicopter designed and anufactured by Rotorcraft Design and Excellence Centre (ROTAM) - Istanbul Technical University (ITU) [1]. The rotorcraft has four flexible blades with Hanson s rotor hub odel [2]. Tail rotor is designed as conventional one and epennages are fixed. The helicopter is equipped with a turbo-shaft engine which produces 65 SHP (shaft horsepower). A picture of the rotorcraft fro anufacturing phase is given in Figure 1 and soe paraeters for atheatical odel are illustrated in Table 1. Table 1 Soe helicopter paraeters [1] Main Rotor lade nuber Radius Rotor angular velocity.. lade twist. Rotor solidity. STA L.. WL. Tail Rotor lade nuber Radius Rotor angular velocity... Rotor solidity. STA L.. WL. Vertical Fin Area Incidence... STA L.. WL. Horizontal Stabilizer Area Incidence STA L.. WL... Fuselage Gross Weigh.. STA L.. WL rp deg - - rp - 2 deg 2 deg kg Figure 1 Prototyped Helicopter Autoatic Flight Control Syste (AFCS) proposed with this study consists of speed hold, height hold, and heading hold properties. Scheatic view of AFCS panel on the board is shown in Figure 2. The panel includes a aster switch to turn on/off the syste. Speed, height and heading hold switches as well have on and off options. When the aster switch is engaged, AFCS supplies short-ter attitude and attitude rate stabilization to assist the pilot. For use in hands-free flight pilot ust switched on speed hold, height hold, and heading hold switches. The rotorcraft will keep current flying speed just after turning speed hold switch on. eside, height hold switch should be turned on to hold current flight altitude. If speed hold is on when height hold is turned on then control algorith that runs for speed hold is cancelled and a new control law is replaced both for speed an altitude hold ode. And finally, turning heading switch on will keep rotorcraft heading angle at current flying yaw angle. Figure 2 Scheatic view of flight control panel We should first define nonlinear flight dynaics of the rotorcraft to design a control law for ISSN: Issue 12, Volue 6, Deceber 211
3 Erkan Abdulhaitbilal, Elbrous M. Jafarov stabilization. Then we can easily linearize nonlinear dynaics near any tri point. Hence a LQ optial control law, as we desire, can be structured. The rigid-body equation of otion of the rotorcraft is as [1,3,6,11]: u X s 1 v Y g c s w Z c c r q u r p v q p w p L r q p 1 1 q I M I r p I q r N q p r 1 s t c t p c s q s sc c sc r (1) (2) (3) where X, Y, Z are the acting total forces in (N); L, M, N are the acting total oents in (N); u, v, w are the body velocities in (/s); p, q, r are the body angular rates in (rad/s);,, are the body attitude angles in (rad); c = cos, s = sin, t = tan, sc = sec; is the ass in (kg) and I is the inertia atrix as: I I I I I I I I I I xx xy xz xy yy yz xz yz zz (4) Expansion of X, Y, Z, L, M, N for a single rotor helicopter is studied in [1,3,1,11,12]. We pass this stage because evaluating rotorcraft forces and oents are wide area of study. We will use only results that we have obtained. Design procedure of AFCS is based on linear quadratic optial control proble. At this stage, nonlinear flight dynaics will be linearized and control law will be designed on linear flight dynaic odel. To guarantee the stability at any flight speed and altitude control gains will be scheduled for flight speed and altitude by flight coputer fro data tables. We would like to point that siulations of AFCS will be perfored on nonlinear flight dynaics odel. The linear for of above equation of otions (1)- (3) describing rigid body otion of helicopter is of the for: x A x (5) where x is the perturbations fro tri of the states variables of longitudinal otion: u, w, q, and lateral otion: v, p, r ; δ is the deviation fro tri control positions of longitudinal otion c, 1s and lateral otion 1c, p. The eleents of the A and atrices consist of inertial and gravitational ters that can be obtained analytically fro the equation of otion (1)-(3) and partial derivatives fored fro aerodynaics forces and oents. The force and oent derivatives can be obtained by considering both position and negative perturbation fro tri as [1,9]: X u X u X ( u u ) X ( u u ) 2u (6) Noralized stability and control derivatives for longitudinal otion are x i =X i /, z i =Z i /, i =M i /I yy, where i = u, w, q, δ c, δ 1s. For lateral otion stability and control derivatives are noralized as y j =Y j /, l j =(I zz L j +I xz N j )/I c, n j =(I xz L j +I zz N j )/I c, 2 where j = v, p, r, δ 1c, δ p and Ic I xxi zz I xz. These derivatives are calculated for considered helicopter in [1] for any tri conditions. At the end of the paper in Table 2 we give soe stability and control derivatives for prototype helicopter odel at different flight speeds and altitudes. Also, corresponding stability and control derivatives that appear in this paper can be easily calculated fro nonlinear flight dynaics odel for any tri conditions in the bounds of to 7 /s forward speed and to 1, ft of flight altitude with steps size of 5 /s of forward speed and 2,5 ft of altitude. 2.1 Speed Hold Proble For speed hold proble now consider linearized the set of equation witch are enough to describe longitudinal flight dynaics of the helicopter [6]: u x u x w z w q g cos u w q x C x c 1s 1s w z u z w z u q g sin u w q z z C c 1s 1s (7) (8) ISSN: Issue 12, Volue 6, Deceber 211
4 Erkan Abdulhaitbilal, Elbrous M. Jafarov q u w q (9) u w q C c 1s 1s q (1) The state space for is: x ( t) A x ( t) ( t) SH SH SH SH SH y ( t) C x ( t) SH SH SH (11) where the state vector is x SH (t)=[u w q ] T, the control vector is SH (t)=[ c 1s ] T, C SH is unit atrix, and A SH SH xu xw xq w g cos zu zw zq u g sin u w q 1 x x C 1s z z C 1s C 1s (12) (13) The stability of longitudinal flight dynaics can be deterined by calculation of the eigenvalues of the syste atrix (A SH ). Eigenvalues are illustrated in Figure 3 for considered flight envelope. There are any roots at rights side of iaginary axis which eans that open-loop longitudinal dynaics are unstable. 2.2 Height Hold Proble For height/altitude hold syste linear height dynaics as given below are included to the linear longitudinal dynaics described in previous subsection by (12)-(13) as [6]: h w u (14) Therefore, the state vector can be rewritten as x SH (t)=[u w q h] T. Then, syste and control distribution atrices can be fored as: xu xw xq w g c zu zw zq u g s ASH u w q 1 1 u (15) x z 1s 1s SH C 1s C C x z (16) The eigenvalues of height hold dynaics are given in Figure 3. As seen fro the figure so any eigenvalues are the right side of iaginary axis and the worst situation is that soe of the have greater values which ean that those odes cannot be stabilized by a huan pilot. Figure 3 Eigenvalues of open-loop longitudinal helicopter flight dynaics. 2.3 Heading Hold Proble Heading of rotorcraft is deterined by lateral flight dynaics. The set of equation which describes lateral flight dynaics are [6]: v y v y u r y w p v r p + g c c y y 1c 1c v p r 1c 1c p p p p (17) p l v l p l r l l (18) r n v n p n r n n (19) v p r 1c 1c p p p c tr (2) c sc r (21) The state space for is: x ( t) A x ( t) ( t) HH HH HH HH HH y ( t) C x ( t) HH HH HH (22) ISSN: Issue 12, Volue 6, Deceber 211
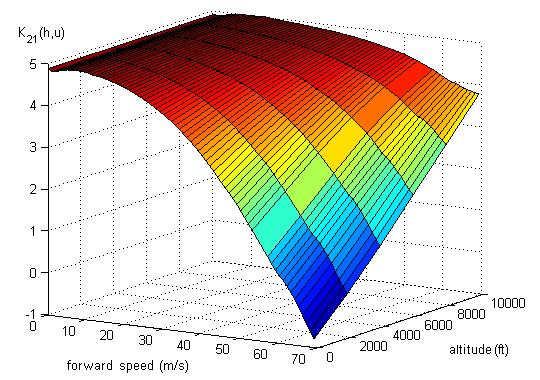
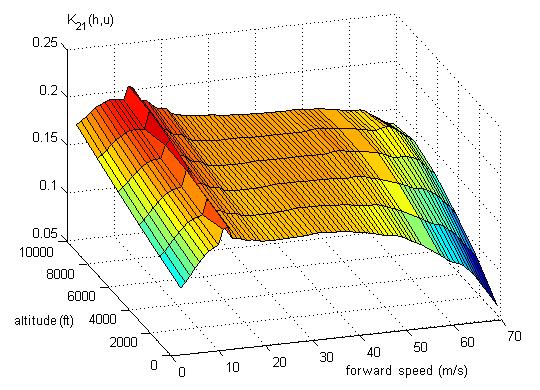
5 Erkan Abdulhaitbilal, Elbrous M. Jafarov where the state vector is x SH (t)=[v p r ] T, the control vector is HH (t)=[ 1c p ] T, and yv y p w g c c yr u l v l p l r AHH 1 c t (23) n v n p n r c sc y y 1c P l l 1c P HH (24) n n 1c P iprove ission reliability and enhance safety of flight. 3.1 LQ Optial Control Law Consider that helicopter flight dynaics are described with linear set of equations like (15)-(16) or (23)-(24). To achieve an optial condition a perforance easure to be iniized should be defined [8]: 1 T T J x ( t) Q( t) x( t) ( t) R( t) ( t) dt 2 (25) where Q is a real syetric positive sei-definite atrix, R is a real syetric positive definite atrix, x and are states and control vectors, respectively. In the design process, it is assued that the states and controls are not bounded. However, control inputs are bounded due to physical liitation of the swash plate echanis and also states of the syste are bounded because of aerodynaic rules and perforance of power-plant. Here, the ai is to aintain the state vector close to the origin without an excessive expenditure of control effort. So, the optial control law is linear and it is fored as a cobination of the syste as [8]: * 1 T * * ( t) R Fx ( t) Kx ( t) (26) Figure 4 Eigenvalues of open-loop lateral helicopter flight dynaics. The stability of lateral dynaics syste can be obtained by calculation of the eigenvalues of the syste atrix A HH. Eigenvalues are illustrated in Figure 4 for considered flight envelope. There are any roots at rights side of iaginary axis which eans that open-loop longitudinal dynaics are unstable. 3 Design of Autoatic Flight Control Syste (AFCS) Typically, SAS, autopilot and flight director systes and odes of operations are luped together and referred to as an Autoatic Flight Control Syste (AFCS). There can be various cobinations of single and dual AFCS installations available for a particular helicopter odel. In this paper we have considered single ode. The LQ optial control law for AFCS is designed to reduce pilot workload, where F is the solution of following Algebraic Riccati Equation (ARE): (27) T 1 A F FA Q FR F And the optial cost of perforance index can be calculated fro: J =.5x T ()Kx(). The stability of the closed-loop syste can be deterined by calculation of the eigenvalues of the closed-loop syste atrix A R -1 T F or (A K) according to the optial control law (26). 3.2 Gain Scheduled LQ Optial Law Gain scheduling siply eans changing values of control atrix according to predefined conditions. In this paper, the control law is calculated for each tri points considered in flight envelope. In other words, the control atrix K is deterined fro forward speed and flight altitudes as: * * ( h, u, t) K ( h, u) x ( t) (28) In this paper we have obtained surfaces for each gain of control atrix K. ISSN: Issue 12, Volue 6, Deceber 211
6 Erkan Abdulhaitbilal, Elbrous M. Jafarov Figure 5 lock schee of proposed AFCS 3.3 Gain Scheduled Speed Hold AFCS The proposed LQ optial control law for speed hold AFCS is considered as: 3.4 Gain Scheduled Height Hold AFCS Siilarly to previous control law height hold is fored as: * c * SH SH 1s K ( h, u) x ( t) (29) * c * AH AH 1s K ( h, u) x ( t) (3) where K SH,ij (h,u) is the scheduled control atrix which eleents are selected fro Figure 9. In flight coputer these plots are coded as look-up tables. The eigenvalues of Speed Hold AFCS are illustrated in Figure 6. As seen fro figure closed-loop eigenvalues are at left side of iaginary axis which eans the syste is stable. After speed hold is turned on, reference value is selected to be current forward flight speed. Therefore, longitudinal dynaics of the rotorcraft is stabilized near selected forward speed by selection of proper gains fro look-up tables in (3) and therefore hands free flight is achieved. where K AH,ij (h,u) is the scheduled control atrix which eleents are selected for Figure 1. Switching height hold on selects reference values to be current forward speed and altitude. If speed hold is on when height hold is switched on then control law for longitudinal otion is replaced with height hold control algorith (31). Therefore, longitudinal dynaics of the rotorcraft is stabilized near selected forward speed and flight altitude. The eigenvalues of Speed Hold AFCS are illustrated in Figure 7. O, the stability of the closed-loop syste is graphically shown. All real parts of eigenvalues of height hold syste are negative signed with enough daping values. Figure 6 Eigenvalues of closed-loop speed hold syste Figure 7 Eigenvalues of closed-loop height hold syste. ISSN: Issue 12, Volue 6, Deceber 211
7 Erkan Abdulhaitbilal, Elbrous M. Jafarov 3.5 Gain Scheduled Heading Hold AFCS The proposed LQ optial control law for heading hold AFCS is considered siilarly to previous ones as: * 1c * HH HH p K ( h, u) x ( t) (31) where K HH,ij (h,u) is the scheduled control atrix which eleents are selected fro Figure 11. In flight coputer these plots are coded as look-up tables. The eigenvalues of Heading Hold AFCS are illustrated in Figure 8. As seen, all eigenvalues of closed-loop syste for bounded flight condition are pushed to the left side of iaginary axis. This pilot illustrates graphically the stability of the syste. Figure 8 Eigenvalues of closed-loop heading hold syste. 4 Siulations After design of AFCS we need to test its perforance and tie responses. For this purpose we have considered nonlinear rotorcraft dynaics odel of prototype helicopter given in [1]. The atheatical odel is built in Matlab-Siulink environent and top view of its block diagra is given in Figure 12. Tie responses of pure rotorcraft dynaics or disabled (off ode) of AFCS are shown in figure 13. As seen fro the figure the unstable nature of rotorcraft pushes state variables away fro steady state situation after 4 seconds. This tie is sufficient for the pilot to take a control action to stabilize the rotorcraft. To iprove ission reliability, enhance safety of flight without excessive control inputs and reduce pilot workload AFCS is enabled for different operating cases and aneuvers. Tie responses of aneuvers rejecting 5 /s (9.72 knots) vertical and sideward winds with 5 seconds duration at sea level and 3 /s (58.32 knots) forward flight speed are given in Figure 14 and 15, respectively. In this case, only aster switch of AFCS is on. The disturbance wind effects are rejected with high daping pitch and roll rates for both cases. However rotorcraft odel is losing 3 of altitude and pushed 25 to sideward for each aneuver. Forward speed correction aneuver at sea level and 3 /s (58.32 knots) forward flight speed is given in Figure 16. The optial control algorith eliinates 3 /s forward speed error in a couple of seconds with high daping attitude rates where only aster switch of AFCS is on. On the other hand, attitude angles reach steady state in 15 seconds with a confortable aneuver. Tie responses for total 7.1 /s (13.8 knots) crosswind rejection at sea level and 3 /s (58.32 knots) forward flight speed when AFCS aster, speed hold, height hold, and heading hold switches are engaged are given in Figure 17. The distributive crosswind with 5 seconds duration is eliinated in 15 seconds. LQ optial control algorith provides high daping roll, pitch and yaw rates. ut roll angle sees to exhibit daped oscillation for a while during stabilization because of the 7.1 /s crosswind. For this disturbance rejection aneuver only collective inputs appears to provide a little bit high control values in arrange of 15 degrees to keep rotorcraft at desired flight altitude, where the rest control inputs changes in 2-3 degrees. 5 Conclusion In this paper, we have introduced nonlinear rigid body dynaics for rotorcraft atheatical odel. Then we have linearized helicopter flight dynaics to design a gain scheduled LQ optial control syste to reduce pilot workload, iprove ission reliability and enhance safety of flight without excessive control inputs. We have designed our AFCS to stabilize helicopter flight dynaics and aintain desired flight speed, altitude and heading as gain scheduled where gains of feedback atrix are selected with flight speed and altitude fro look-up tables coded in flight coputer. Stability analyze is perfored graphically by plotting eigenvalues both for open and closed-loop systes in considered flight envelope which bounds are to 7 /s forward speed and to 1, ft of flight altitude. Proposed LQ optial control law ISSN: Issue 12, Volue 6, Deceber 211
8 Erkan Abdulhaitbilal, Elbrous M. Jafarov have pushed eigenvalues to the left side of iaginary axis for all design conditions. Proposed control laws are designed on linear flight dynaics however they are evaluated in nonlinear flight dynaics atheatical odel of the prototype helicopter. Siulation results illustrate effectiveness of evaluated ethod and techniques. References: [1] E. Abdulhaitbilal, ITU-Light Coercial Helicopter flight dynaics, stability analysis, and interconnected control systes design, ITU-Library, Istanbul, 21. [2] T. F. Hanson, A Designer Friendly Handbook of Helicopter Rotors, ideasalacarte.co, [3] J.J. Howlett, UH-6A lack Hawk Engineering Siulation Progra: Volue I Matheatical Model, NASA CR 16639, [4] E. Abdulhaitbilal, E.M. Jafarov, and L. Güvenç, Gain Scheduled LQ Optial Control of a Paraetric Light Coercial Helicopter Model at Sea Level. Proceedings of ACMOS'7, 9th WSEAS International Conference on Autoatic Control, Modeling and Siulation, June 27-29, 27, Istanbul, Turkey, [5] C.Y. Huang, R. Celi, I-C. Shih, Reconfigurable flight control systes for a tande helicopter, Journal of Aerican Helicopter Society, vol. 44, pp [6] D. McLean, Autoatic Flight Control Systes, Prentice Hall, London, 199. [7].L. Stevens, F.L. Lewis, Aircraft Control and Siulation, John Wiley & Sons, Inc., [8] D.E. Kirk, Optial Control Theory, Prentice Hall, New Jersey, 197. [9] K.J. Aströ,. Wittenark, Adaptive Control, Addison-Wesley, New Jersey, [1] W. Johnson, Helicopter Theory. Dover Publications Inc, New York, [11] R.W. Prouty, Helicopter Perforance, Stability, and Control. Krieger Publishing, Florida, [12] A.R.S. rawell, G.T. Sutton Done, D. alford, rawell s Helicopter Dynaics, 2nd Edition, AIAA, Virginia, 21 [13] M.D. Takahashi, Rotor-state feedback in the design of flight control laws for a hovering helicopter, Journal of Aerican Helicopter Society, vol. 39, pp [14] R.M. McKilip Jr., T.A. Perri, Helicopter flight control syste design and evaluation using controller inversion techniques, Journal of Aerican Helicopter Society, vol. 37, pp [15] J.N. Rozak, A. Ray, Robust ultivariable control of rotorcraft in forward flight, Journal of Aerican Helicopter Society, vol. 42, pp [16] I. Postlethwaite, A. Serlas, D.J. Walker, A.W. Gubbels, S.W. aillie, M.E. Strange, J. Howitt, H control of the NRC ell 25 fly-by-wire helicopter, Journal of Aerican Helicopter Society, vol. 44, pp [17] Y. Isik, Pitch rate daping of an aircraft by fuzzy and classical PD control, WSEAS Transactions on Systes and Control 5 (7), 21, pp [18] J.-M. Lin, P.-K. Chang, Ziegler-Nichols PID controller based intelligent fuzzy control of a SPM syste design, WSEAS Transactions on Systes and Control 5 (1), 21, pp Table 2 Soe stability and control derivatives of prototype helicopter Uo h T GW /s ft 288K 227kg Φ θ ψ θc θ1s θ1c θp U V Q V P R dc d1s d1c dp X Z M Y L N /s ft 288K 227kg ISSN: Issue 12, Volue 6, Deceber 211
9 Erkan Abdulhaitbilal, Elbrous M. Jafarov /s ft 288K 227kg /s ft 288K 227kg /s 1ft 288K 227kg /s 1ft 288K 227kg /s 1ft 288K 227kg /s 1ft 288K 227kg ISSN: Issue 12, Volue 6, Deceber 211







10 Erkan Abdulhaitbilal, Elbrous M. Jafarov Figure 9 Gain scheduling surfaces of speed hold feedback atrix gain, K SH (h,u). ISSN: Issue 12, Volue 6, Deceber 211







11 Erkan Abdulhaitbilal, Elbrous M. Jafarov ISSN: Issue 12, Volue 6, Deceber 211








12 Erkan Abdulhaitbilal, Elbrous M. Jafarov Figure 1 Gain scheduling surfaces of height hold feedback atrix gain, K AH (h,u). ISSN: Issue 12, Volue 6, Deceber 211
. 12.")
 p,q,r u,v,w X X Control Error Control FlightHeight X Control FlightHeight")


13 Erkan Abdulhaitbilal, Elbrous M. Jafarov Figure 11 Gain scheduling surfaces of heading hold feedback atrix gain, K HH (h,u) u(t) Display 2 x(t) p,q,r u,v,w X X Control Error Control FlightHeight X Control FlightHeight Oega FM Helicopter Aerodinaik Model (MR -TR -HS-VF-F-E) FM 6DoF X phi,theta,psi x_e,y_e,z_e Flight Altitude e e e e e e e-6 Oega Arrius 2T1 Turboeca Display 4 FM Display 1 Total F &M e e e Display Display 3 Figure 12 lock diagra of nonlinear flight dynaics of prototyped helicopter ISSN: Issue 12, Volue 6, Deceber 211
14 Erkan Abdulhaitbilal, Elbrous M. Jafarov Figure 13 Tie responses of nonlinear odel for a tri condition (h = ft, u = 3/s): AFCS is off. Figure 14 Rejection of vertical wind (h = ft, u = 3/s): AFCS is on. ISSN: Issue 12, Volue 6, Deceber 211
15 Erkan Abdulhaitbilal, Elbrous M. Jafarov Figure 15 Rejection of side wind (h = ft, u = 3/s): AFCS is on. Figure 16 Forward speed correction anoeuvre (h = ft, u = 3/s): AFCS is on. ISSN: Issue 12, Volue 6, Deceber 211

16 Erkan Abdulhaitbilal, Elbrous M. Jafarov Figure 17 Rejection of vertical and side wind (h = ft, u = 3/s): AFCS is on, speed hold is on, height hold is on, and heading hold is on. Erkan Abdulhaitbilal was born in alchik, ulgaria in He received.sc., M.Sc., and Ph.D. degrees in Aeronautics and Astronautics Engineering fro Istanbul Technical University (ITU), Turkey, in 22, 25, and 21, respectively. He worked as a research engineer in stability and control group of Rotorcraft Research and Excellence Center of ITU under Project DPT-HAGU fro 23 to 29. He is now with Altinay Robot Technologies and works as a research engineer in electrical car departent, 211. Dr. Abdulhaitbilal is the author of ore than 2 international conference papers and research reports. His research interests include autoatic control, variable structure control, flight dynaics and control, robot control. Elbrous M. Jafarov was born in province Gokche (west Azerbaijan) in He received his M.Sc. degree in Autoation and Control Engineering fro Azerbaijan State Oil Acadey (aku) in The Ph.D. and D.Sc. (Eng) degrees were received fro NIPINefteKhiAutoat- TsNIIKAutoation (Moscow) and Institute of Cybernetics of Azerbaijan Science Acadey; and Institute of Control Sciences (Moscow)-MIEM-LETI in Control Engineering in 1973 and 1982, respectively. He was the Head of Variable Structure Process Control Laboratory fro 1969 to 1984, the Chairan of the Autoation and Robotic Systes Departent at the Az. TU during He has been a professor in Istanbul Technical University since His research and teaching interests include control theory, sliding ode control, tie-delay systes, robot control, robust control, optial control. ISSN: Issue 12, Volue 6, Deceber 211
A Simulation Study for Practical Control of a Quadrotor
 A Siulation Study for Practical Control of a Quadrotor Jeongho Noh* and Yongkyu Song** *Graduate student, Ph.D. progra, ** Ph.D., Professor Departent of Aerospace and Mechanical Engineering, Korea Aerospace
A Siulation Study for Practical Control of a Quadrotor Jeongho Noh* and Yongkyu Song** *Graduate student, Ph.D. progra, ** Ph.D., Professor Departent of Aerospace and Mechanical Engineering, Korea Aerospace
Ufuk Demirci* and Feza Kerestecioglu**
 1 INDIRECT ADAPTIVE CONTROL OF MISSILES Ufuk Deirci* and Feza Kerestecioglu** *Turkish Navy Guided Missile Test Station, Beykoz, Istanbul, TURKEY **Departent of Electrical and Electronics Engineering,
1 INDIRECT ADAPTIVE CONTROL OF MISSILES Ufuk Deirci* and Feza Kerestecioglu** *Turkish Navy Guided Missile Test Station, Beykoz, Istanbul, TURKEY **Departent of Electrical and Electronics Engineering,
Filtering and Fusion based Reconstruction of Angle of Attack
 Filtering and Fusion based Reconstruction of Angle of Attack N Shantha Kuar Scientist, FMC Division NAL, Bangalore 7 E-ail: nskuar@css.nal.res.in Girija G Scientist, FMC Division NAL, Bangalore 7 E-ail:
Filtering and Fusion based Reconstruction of Angle of Attack N Shantha Kuar Scientist, FMC Division NAL, Bangalore 7 E-ail: nskuar@css.nal.res.in Girija G Scientist, FMC Division NAL, Bangalore 7 E-ail:
16.30/31 September 24, 2010 Prof. J. P. How and Prof. E. Frazzoli Due: October 15, 2010 T.A. B. Luders /31 Lab #1
 16.30/31 Septeber 24, 2010 Prof. J. P. How and Prof. E. Frazzoli Due: October 15, 2010 T.A. B. Luders 16.30/31 Lab #1 1 Introduction The Quanser helicopter is a echanical device that eulates the flight
16.30/31 Septeber 24, 2010 Prof. J. P. How and Prof. E. Frazzoli Due: October 15, 2010 T.A. B. Luders 16.30/31 Lab #1 1 Introduction The Quanser helicopter is a echanical device that eulates the flight
Gary J. Balas Aerospace Engineering and Mechanics, University of Minnesota, Minneapolis, MN USA
 μ-synthesis Gary J. Balas Aerospace Engineering and Mechanics, University of Minnesota, Minneapolis, MN 55455 USA Keywords: Robust control, ultivariable control, linear fractional transforation (LFT),
μ-synthesis Gary J. Balas Aerospace Engineering and Mechanics, University of Minnesota, Minneapolis, MN 55455 USA Keywords: Robust control, ultivariable control, linear fractional transforation (LFT),
System Design of Quadrotor
 Syste Design of Quadrotor Yukai Gong, Weina Mao, Bu Fan, Yi Yang Mar. 29, 2016 A final project of MECHENG 561. Supervised by Prof. Vasudevan. 1 Abstract In this report, an autonoous quadrotor is designed.
Syste Design of Quadrotor Yukai Gong, Weina Mao, Bu Fan, Yi Yang Mar. 29, 2016 A final project of MECHENG 561. Supervised by Prof. Vasudevan. 1 Abstract In this report, an autonoous quadrotor is designed.
16.333: Lecture # 7. Approximate Longitudinal Dynamics Models
 16.333: Lecture # 7 Approxiate Longitudinal Dynaics Models A couple ore stability derivatives Given ode shapes found identify sipler odels that capture the ain responses Fall 24 16.333 6 1 More Stability
16.333: Lecture # 7 Approxiate Longitudinal Dynaics Models A couple ore stability derivatives Given ode shapes found identify sipler odels that capture the ain responses Fall 24 16.333 6 1 More Stability
Simulation and Experimental Works of Quadcopter Model for Simple Maneuver
 Siulation and xperiental Works of Quadcopter Model for Siple Maneuver Rafiuddin Sya Mechanical ngineering Departent, Hasnuddin University, Jl. P. Keerdekaan K Makassar - Indonesia (corresponding author
Siulation and xperiental Works of Quadcopter Model for Siple Maneuver Rafiuddin Sya Mechanical ngineering Departent, Hasnuddin University, Jl. P. Keerdekaan K Makassar - Indonesia (corresponding author
Inverted Pendulum control with pole assignment, LQR and multiple layers sliding mode control
 J. Basic. Appl. Sci. Res., 3(1s)363-368, 013 013, TetRoad Publication ISSN 090-4304 Journal of Basic and Applied Scientific Research www.tetroad.co Inverted Pendulu control with pole assignent, LQR and
J. Basic. Appl. Sci. Res., 3(1s)363-368, 013 013, TetRoad Publication ISSN 090-4304 Journal of Basic and Applied Scientific Research www.tetroad.co Inverted Pendulu control with pole assignent, LQR and
Supplementary Section D: Additional Material Relating to Helicopter Flight Mechanics Models for the Case Study of Chapter 10.
 Supplementary Section D: Additional Material Relating to Helicopter Flight Mechanics Models for the Case Study of Chapter 1. D1 Nonlinear Flight-Mechanics Models and their Linearisation D1.1 Introduction
Supplementary Section D: Additional Material Relating to Helicopter Flight Mechanics Models for the Case Study of Chapter 1. D1 Nonlinear Flight-Mechanics Models and their Linearisation D1.1 Introduction
CHAPTER 19: Single-Loop IMC Control
 When I coplete this chapter, I want to be able to do the following. Recognize that other feedback algoriths are possible Understand the IMC structure and how it provides the essential control features
When I coplete this chapter, I want to be able to do the following. Recognize that other feedback algoriths are possible Understand the IMC structure and how it provides the essential control features
The dynamic game theory methods applied to ship control with minimum risk of collision
 Risk Analysis V: Siulation and Hazard Mitigation 293 The dynaic gae theory ethods applied to ship control with iu risk of collision J. Lisowski Departent of Ship Autoation, Gdynia Maritie University, Poland
Risk Analysis V: Siulation and Hazard Mitigation 293 The dynaic gae theory ethods applied to ship control with iu risk of collision J. Lisowski Departent of Ship Autoation, Gdynia Maritie University, Poland
Seismic Analysis of Structures by TK Dutta, Civil Department, IIT Delhi, New Delhi.
 Seisic Analysis of Structures by K Dutta, Civil Departent, II Delhi, New Delhi. Module 5: Response Spectru Method of Analysis Exercise Probles : 5.8. or the stick odel of a building shear frae shown in
Seisic Analysis of Structures by K Dutta, Civil Departent, II Delhi, New Delhi. Module 5: Response Spectru Method of Analysis Exercise Probles : 5.8. or the stick odel of a building shear frae shown in
Chapter 1: Basics of Vibrations for Simple Mechanical Systems
 Chapter 1: Basics of Vibrations for Siple Mechanical Systes Introduction: The fundaentals of Sound and Vibrations are part of the broader field of echanics, with strong connections to classical echanics,
Chapter 1: Basics of Vibrations for Siple Mechanical Systes Introduction: The fundaentals of Sound and Vibrations are part of the broader field of echanics, with strong connections to classical echanics,
Design of Sliding Mode Stabilizer for Wind Turbine Generator using Dynamic Compensation Observer Technique
 Proceedings of the 6th WSES International Conference on Power Systes, Lisbon, Portugal, Septeber -4, 6 84 Design of Sliding Mode Stabilizer for Wind urbine Generator using Dynaic Copensation Observer echnique
Proceedings of the 6th WSES International Conference on Power Systes, Lisbon, Portugal, Septeber -4, 6 84 Design of Sliding Mode Stabilizer for Wind urbine Generator using Dynaic Copensation Observer echnique
Computergestuurde Regeltechniek exercise session Case study : Quadcopter
 Coputergestuurde Regeltechniek exercise session Case study : Quadcopter Oscar Mauricio Agudelo, Bart De Moor (auricio.agudelo@esat.kuleuven.be, bart.deoor@esat.kuleuven.be) February 5, 016 Proble description
Coputergestuurde Regeltechniek exercise session Case study : Quadcopter Oscar Mauricio Agudelo, Bart De Moor (auricio.agudelo@esat.kuleuven.be, bart.deoor@esat.kuleuven.be) February 5, 016 Proble description
2.003 Engineering Dynamics Problem Set 2 Solutions
 .003 Engineering Dynaics Proble Set Solutions This proble set is priarily eant to give the student practice in describing otion. This is the subject of kineatics. It is strongly recoended that you study
.003 Engineering Dynaics Proble Set Solutions This proble set is priarily eant to give the student practice in describing otion. This is the subject of kineatics. It is strongly recoended that you study
Actuators & Mechanisms Actuator sizing
 Course Code: MDP 454, Course Nae:, Second Seester 2014 Actuators & Mechaniss Actuator sizing Contents - Modelling of Mechanical Syste - Mechaniss and Drives The study of Mechatronics systes can be divided
Course Code: MDP 454, Course Nae:, Second Seester 2014 Actuators & Mechaniss Actuator sizing Contents - Modelling of Mechanical Syste - Mechaniss and Drives The study of Mechatronics systes can be divided
Department of mechanics, Faculty of engineering Hamadan branch, Islamic azad university, Hamadan, Iran. Abstract
 194 Ciência enatura, Santa Maria, v. 37 Part 1 015, p. 194 198 ISSN ipressa: 0100-8307 ISSN on-line: 179-460X Vibration Siulation of the cylindrical reservoir shell containing fluid vortex with the help
194 Ciência enatura, Santa Maria, v. 37 Part 1 015, p. 194 198 ISSN ipressa: 0100-8307 ISSN on-line: 179-460X Vibration Siulation of the cylindrical reservoir shell containing fluid vortex with the help
Chapter 2: Introduction to Damping in Free and Forced Vibrations
 Chapter 2: Introduction to Daping in Free and Forced Vibrations This chapter ainly deals with the effect of daping in two conditions like free and forced excitation of echanical systes. Daping plays an
Chapter 2: Introduction to Daping in Free and Forced Vibrations This chapter ainly deals with the effect of daping in two conditions like free and forced excitation of echanical systes. Daping plays an
Professor, Department of Mechanical Engineering
 State Space Approach in Modelling Dr Bishakh Bhattacharya Professor, Departent of Mechanical Engineering IIT Kanpur Joint Initiative of IITs and IISc - Funded by MHRD Answer of the Last Assignent Following
State Space Approach in Modelling Dr Bishakh Bhattacharya Professor, Departent of Mechanical Engineering IIT Kanpur Joint Initiative of IITs and IISc - Funded by MHRD Answer of the Last Assignent Following
ME Machine Design I. FINAL EXAM. OPEN BOOK AND CLOSED NOTES. Friday, May 8th, 2009
 ME 5 - Machine Design I Spring Seester 009 Nae Lab. Div. FINAL EXAM. OPEN BOOK AND LOSED NOTES. Friday, May 8th, 009 Please use the blank paper for your solutions. Write on one side of the paper only.
ME 5 - Machine Design I Spring Seester 009 Nae Lab. Div. FINAL EXAM. OPEN BOOK AND LOSED NOTES. Friday, May 8th, 009 Please use the blank paper for your solutions. Write on one side of the paper only.
An Inverse Interpolation Method Utilizing In-Flight Strain Measurements for Determining Loads and Structural Response of Aerospace Vehicles
 An Inverse Interpolation Method Utilizing In-Flight Strain Measureents for Deterining Loads and Structural Response of Aerospace Vehicles S. Shkarayev and R. Krashantisa University of Arizona, Tucson,
An Inverse Interpolation Method Utilizing In-Flight Strain Measureents for Deterining Loads and Structural Response of Aerospace Vehicles S. Shkarayev and R. Krashantisa University of Arizona, Tucson,
Modular Control of a Rotary Inverted Pendulum System
 Paper ID #14582 Modular Control of a Rotary Inverted Pendulu Syste Dr. Xiuin Diao, Purdue University Xiuin Diao received his B.S. degree in Mechanical Design and Manufacturing fro Yantai University, China,
Paper ID #14582 Modular Control of a Rotary Inverted Pendulu Syste Dr. Xiuin Diao, Purdue University Xiuin Diao received his B.S. degree in Mechanical Design and Manufacturing fro Yantai University, China,
DESIGN, SIMULATION AND IMPLEMENTATION OF DECENTRALIZED PI CONTROLLERS FOR A MULTIVARIABLE FEED BLENDING SYSTEM AT THE FALCONBRIDGE SUDBURY SMELTER
 DESIGN, SIMULATION AND IMPLEMENTATION OF DECENTRALIZED PI CONTROLLERS FOR A MULTIVARIABLE FEED BLENDING SYSTEM AT THE FALCONBRIDGE SUDBURY SMELTER B. Boulet McGill University Departent of Electrical and
DESIGN, SIMULATION AND IMPLEMENTATION OF DECENTRALIZED PI CONTROLLERS FOR A MULTIVARIABLE FEED BLENDING SYSTEM AT THE FALCONBRIDGE SUDBURY SMELTER B. Boulet McGill University Departent of Electrical and
ANALYSIS OF HALL-EFFECT THRUSTERS AND ION ENGINES FOR EARTH-TO-MOON TRANSFER
 IEPC 003-0034 ANALYSIS OF HALL-EFFECT THRUSTERS AND ION ENGINES FOR EARTH-TO-MOON TRANSFER A. Bober, M. Guelan Asher Space Research Institute, Technion-Israel Institute of Technology, 3000 Haifa, Israel
IEPC 003-0034 ANALYSIS OF HALL-EFFECT THRUSTERS AND ION ENGINES FOR EARTH-TO-MOON TRANSFER A. Bober, M. Guelan Asher Space Research Institute, Technion-Israel Institute of Technology, 3000 Haifa, Israel
Bifurcation Analysis of a Generic Pusher Type Transport Aircraft Configuration in Near-Stall Flight
 Bifurcation Analysis of a Generic Pusher Type Transport Aircraft Configuration in Near-Stall Flight Ait K Khatri*, Vineet Kuar* * CSIR-National Aerospace Laboratories, Bangalore-560017, India Keywords:
Bifurcation Analysis of a Generic Pusher Type Transport Aircraft Configuration in Near-Stall Flight Ait K Khatri*, Vineet Kuar* * CSIR-National Aerospace Laboratories, Bangalore-560017, India Keywords:
Simple Harmonic Motion
 Siple Haronic Motion Physics Enhanceent Prograe for Gifted Students The Hong Kong Acadey for Gifted Education and Departent of Physics, HKBU Departent of Physics Siple haronic otion In echanical physics,
Siple Haronic Motion Physics Enhanceent Prograe for Gifted Students The Hong Kong Acadey for Gifted Education and Departent of Physics, HKBU Departent of Physics Siple haronic otion In echanical physics,
Robustness Experiments for a Planar Hopping Control System
 To appear in International Conference on Clibing and Walking Robots Septeber 22 Robustness Experients for a Planar Hopping Control Syste Kale Harbick and Gaurav S. Sukhate kale gaurav@robotics.usc.edu
To appear in International Conference on Clibing and Walking Robots Septeber 22 Robustness Experients for a Planar Hopping Control Syste Kale Harbick and Gaurav S. Sukhate kale gaurav@robotics.usc.edu
Torsion Experiment. Encoder #3 ( 3 ) Third encoder/disk for Model 205a only. Figure 1: ECP Torsion Experiment
 Third encoder/disk for Model 205a only. Figure 1: ECP Torsion Experiment") Torsion Experient Introduction For the Torsion lab, there are two required experients to perfor and one extra credit assignent at the end. In experient 1, the syste paraeters need to be identified so that
Torsion Experient Introduction For the Torsion lab, there are two required experients to perfor and one extra credit assignent at the end. In experient 1, the syste paraeters need to be identified so that
Uncertainty Propagation and Nonlinear Filtering for Space Navigation using Differential Algebra
 Uncertainty Propagation and Nonlinear Filtering for Space Navigation using Differential Algebra M. Valli, R. Arellin, P. Di Lizia and M. R. Lavagna Departent of Aerospace Engineering, Politecnico di Milano
Uncertainty Propagation and Nonlinear Filtering for Space Navigation using Differential Algebra M. Valli, R. Arellin, P. Di Lizia and M. R. Lavagna Departent of Aerospace Engineering, Politecnico di Milano
Self-Erecting Inverted Pendulum: Swing up and Stabilization Control
 Self-Erecting Inverted Pendulu: Swing up and Stabilization Control S. McGilvray (Winner of the IEEE Life Meber ward for best paper fro the Central Canada Council for the IEEE Student Paper Contest, ) Contents
Self-Erecting Inverted Pendulu: Swing up and Stabilization Control S. McGilvray (Winner of the IEEE Life Meber ward for best paper fro the Central Canada Council for the IEEE Student Paper Contest, ) Contents
In the session you will be divided into groups and perform four separate experiments:
 Mechanics Lab (Civil Engineers) Nae (please print): Tutor (please print): Lab group: Date of lab: Experients In the session you will be divided into groups and perfor four separate experients: (1) air-track
Mechanics Lab (Civil Engineers) Nae (please print): Tutor (please print): Lab group: Date of lab: Experients In the session you will be divided into groups and perfor four separate experients: (1) air-track
ACTIVE VIBRATION CONTROL FOR STRUCTURE HAVING NON- LINEAR BEHAVIOR UNDER EARTHQUAKE EXCITATION
 International onference on Earthquae Engineering and Disaster itigation, Jaarta, April 14-15, 8 ATIVE VIBRATION ONTROL FOR TRUTURE HAVING NON- LINEAR BEHAVIOR UNDER EARTHQUAE EXITATION Herlien D. etio
International onference on Earthquae Engineering and Disaster itigation, Jaarta, April 14-15, 8 ATIVE VIBRATION ONTROL FOR TRUTURE HAVING NON- LINEAR BEHAVIOR UNDER EARTHQUAE EXITATION Herlien D. etio
Swing Up a Pendulum by Energy Control
 International ournal o Engineering and Technology Volue 2 No., March, 22 Swing Up a Pendulu by Energy Control Araat Zaidan, Bashir M.Y.Nouri, Basi Alsayid, Departent o Electrical Engineering, Palestine
International ournal o Engineering and Technology Volue 2 No., March, 22 Swing Up a Pendulu by Energy Control Araat Zaidan, Bashir M.Y.Nouri, Basi Alsayid, Departent o Electrical Engineering, Palestine
Designing 3-DOF Hardware-In-The-Loop Test Platform Controlling Multirotor Vehicles
 WeAT3.5 Designing 3-DOF Hardware-In-The-Loop Test Platfor Controlling Multirotor Vehicles Muhsin Hancer Rahan Bitirgen Isail Bayezit Faculty of Aeronautical and Space Sciences, Necettin Erbakan University,
WeAT3.5 Designing 3-DOF Hardware-In-The-Loop Test Platfor Controlling Multirotor Vehicles Muhsin Hancer Rahan Bitirgen Isail Bayezit Faculty of Aeronautical and Space Sciences, Necettin Erbakan University,
Feedback Linearization and Model Reference Adaptive Control of a Magnetic Levitation System
 eedback Linearization and Model Reference Adaptive Control of a Magnetic Levitation Syste Luiz H. S. Torres, Leizer Schnitan, Carlos A. V. V. Júnior, J. A. M. elippe de Souza Centro de Capacitação Tecnológica
eedback Linearization and Model Reference Adaptive Control of a Magnetic Levitation Syste Luiz H. S. Torres, Leizer Schnitan, Carlos A. V. V. Júnior, J. A. M. elippe de Souza Centro de Capacitação Tecnológica
MATHEMATICAL MODEL OF THE ENERGETIC CONSUMPTION FOR SOIL DIGGING MACHINES IN GREENHOUSES
 Bulletin of the Transilvania University of Braşov Vol. 3 (5) - 00 Series II: Forestry Wood Industry Agricultural Food Engineering MATHEMATICAL MODEL OF THE ENERGETIC CONSUMPTION FOR SOIL DIGGING MACHINES
Bulletin of the Transilvania University of Braşov Vol. 3 (5) - 00 Series II: Forestry Wood Industry Agricultural Food Engineering MATHEMATICAL MODEL OF THE ENERGETIC CONSUMPTION FOR SOIL DIGGING MACHINES
Spinning Disk and Chladni Plates
 Spinning Disk and Chladni Plates Subitted By MD MARUFUR RAHMAN Msc Sustainable Energy Systes Beng(Hons) Mechanical Engineering Bsc Coputer Science and Engineering Table of Contents Spinning Disk... 3 1.0
Spinning Disk and Chladni Plates Subitted By MD MARUFUR RAHMAN Msc Sustainable Energy Systes Beng(Hons) Mechanical Engineering Bsc Coputer Science and Engineering Table of Contents Spinning Disk... 3 1.0
Use of PSO in Parameter Estimation of Robot Dynamics; Part One: No Need for Parameterization
 Use of PSO in Paraeter Estiation of Robot Dynaics; Part One: No Need for Paraeterization Hossein Jahandideh, Mehrzad Navar Abstract Offline procedures for estiating paraeters of robot dynaics are practically
Use of PSO in Paraeter Estiation of Robot Dynaics; Part One: No Need for Paraeterization Hossein Jahandideh, Mehrzad Navar Abstract Offline procedures for estiating paraeters of robot dynaics are practically
Model Fitting. CURM Background Material, Fall 2014 Dr. Doreen De Leon
 Model Fitting CURM Background Material, Fall 014 Dr. Doreen De Leon 1 Introduction Given a set of data points, we often want to fit a selected odel or type to the data (e.g., we suspect an exponential
Model Fitting CURM Background Material, Fall 014 Dr. Doreen De Leon 1 Introduction Given a set of data points, we often want to fit a selected odel or type to the data (e.g., we suspect an exponential
Force and dynamics with a spring, analytic approach
 Force and dynaics with a spring, analytic approach It ay strie you as strange that the first force we will discuss will be that of a spring. It is not one of the four Universal forces and we don t use
Force and dynaics with a spring, analytic approach It ay strie you as strange that the first force we will discuss will be that of a spring. It is not one of the four Universal forces and we don t use
CONTROL SYSTEMS, ROBOTICS, AND AUTOMATION Vol. IX Uncertainty Models For Robustness Analysis - A. Garulli, A. Tesi and A. Vicino
 UNCERTAINTY MODELS FOR ROBUSTNESS ANALYSIS A. Garulli Dipartiento di Ingegneria dell Inforazione, Università di Siena, Italy A. Tesi Dipartiento di Sistei e Inforatica, Università di Firenze, Italy A.
UNCERTAINTY MODELS FOR ROBUSTNESS ANALYSIS A. Garulli Dipartiento di Ingegneria dell Inforazione, Università di Siena, Italy A. Tesi Dipartiento di Sistei e Inforatica, Università di Firenze, Italy A.
Modeling & Analysis of the International Space Station
 Modeling & Analysis of the International Space Station 1 Physical Syste Solar Alpha Rotary Joints Physical Syste Rotor Stator Gear Train Solar Array Inboard Body Outboard Body +x Solar Array 3 Physical
Modeling & Analysis of the International Space Station 1 Physical Syste Solar Alpha Rotary Joints Physical Syste Rotor Stator Gear Train Solar Array Inboard Body Outboard Body +x Solar Array 3 Physical
An Approximate Model for the Theoretical Prediction of the Velocity Increase in the Intermediate Ballistics Period
 An Approxiate Model for the Theoretical Prediction of the Velocity... 77 Central European Journal of Energetic Materials, 205, 2(), 77-88 ISSN 2353-843 An Approxiate Model for the Theoretical Prediction
An Approxiate Model for the Theoretical Prediction of the Velocity... 77 Central European Journal of Energetic Materials, 205, 2(), 77-88 ISSN 2353-843 An Approxiate Model for the Theoretical Prediction
Adaptive Controller Design for a Synchronous Generator with Unknown Perturbation in Mechanical Power
 308 International Journal of Control Xiaohong Autoation Jiao Yuanzhang and Systes Sun vol and 3 Tielong no (special Shen edition) pp 308-34 June 005 Adaptive Controller Design for a Synchronous Generator
308 International Journal of Control Xiaohong Autoation Jiao Yuanzhang and Systes Sun vol and 3 Tielong no (special Shen edition) pp 308-34 June 005 Adaptive Controller Design for a Synchronous Generator
Monitoring and system identification of suspension bridges: An alternative approach
 Monitoring and syste identification of suspension bridges: An alternative approach Erdal Şafak Boğaziçi University, Kandilli Observatory and Earthquake Reseach Institute, Istanbul, Turkey Abstract This
Monitoring and syste identification of suspension bridges: An alternative approach Erdal Şafak Boğaziçi University, Kandilli Observatory and Earthquake Reseach Institute, Istanbul, Turkey Abstract This
Smith Predictor Based-Sliding Mode Controller for Integrating Process with Elevated Deadtime
 Sith Predictor Based-Sliding Mode Controller for Integrating Process with Elevated Deadtie Oscar Caacho, a, * Francisco De la Cruz b a Postgrado en Autoatización e Instruentación. Grupo en Nuevas Estrategias
Sith Predictor Based-Sliding Mode Controller for Integrating Process with Elevated Deadtie Oscar Caacho, a, * Francisco De la Cruz b a Postgrado en Autoatización e Instruentación. Grupo en Nuevas Estrategias
MASSACHUSETTS INSTITUTE OF TECHNOLOGY Department of Mechanical Engineering 2.010: Systems Modeling and Dynamics III. Final Examination Review Problems
 ASSACHUSETTS INSTITUTE OF TECHNOLOGY Departent of echanical Engineering 2.010: Systes odeling and Dynaics III Final Eaination Review Probles Fall 2000 Good Luck And have a great winter break! page 1 Proble
ASSACHUSETTS INSTITUTE OF TECHNOLOGY Departent of echanical Engineering 2.010: Systes odeling and Dynaics III Final Eaination Review Probles Fall 2000 Good Luck And have a great winter break! page 1 Proble
Neural Network Identifier with Iterative Learning for Turbofan Engine Rotor Speed Control System
 Neural Network Identifier with Iterative earning for Turbofan Engine Rotor Speed Control Syste QIAN Kun PANG Xiangping I Bangyuan Departent of Aerial Instruent and Electric Engineering The First Aeronautical
Neural Network Identifier with Iterative earning for Turbofan Engine Rotor Speed Control Syste QIAN Kun PANG Xiangping I Bangyuan Departent of Aerial Instruent and Electric Engineering The First Aeronautical
The Algorithms Optimization of Artificial Neural Network Based on Particle Swarm
 Send Orders for Reprints to reprints@benthascience.ae The Open Cybernetics & Systeics Journal, 04, 8, 59-54 59 Open Access The Algoriths Optiization of Artificial Neural Network Based on Particle Swar
Send Orders for Reprints to reprints@benthascience.ae The Open Cybernetics & Systeics Journal, 04, 8, 59-54 59 Open Access The Algoriths Optiization of Artificial Neural Network Based on Particle Swar
HYBRID CONTROLLER FOR GUST LOAD ALLEVIATION AND RIDE COMFORT IMPROVEMENT USING DIRECT LIFT CONTROL FLAPS
 3 rd EUROPEAN CONFERENCE FOR AEROSPACE SCIENCES (EUCASS) HYBRID CONTROLLER FOR GUST LOAD ALLEVIATION AND RIDE COMFORT IMPROVEMENT USING DIRECT LIFT CONTROL FLAPS Andreas Wildschek*, Rudolf Maier*, Martin
3 rd EUROPEAN CONFERENCE FOR AEROSPACE SCIENCES (EUCASS) HYBRID CONTROLLER FOR GUST LOAD ALLEVIATION AND RIDE COMFORT IMPROVEMENT USING DIRECT LIFT CONTROL FLAPS Andreas Wildschek*, Rudolf Maier*, Martin
Using a De-Convolution Window for Operating Modal Analysis
 Using a De-Convolution Window for Operating Modal Analysis Brian Schwarz Vibrant Technology, Inc. Scotts Valley, CA Mark Richardson Vibrant Technology, Inc. Scotts Valley, CA Abstract Operating Modal Analysis
Using a De-Convolution Window for Operating Modal Analysis Brian Schwarz Vibrant Technology, Inc. Scotts Valley, CA Mark Richardson Vibrant Technology, Inc. Scotts Valley, CA Abstract Operating Modal Analysis
Imbalance Estimation for Speed-Varying Rigid Rotors Using Time-Varying Observer
 Shiyu Zhou e-ail: zhous@uich.edu Jianjun Shi 1 e-ail: shihang@uich.edu Departent of Industrial and Operations Engineering, The University of Michigan, Ann Arbor, MI 48109 Ibalance Estiation for Speed-Varying
Shiyu Zhou e-ail: zhous@uich.edu Jianjun Shi 1 e-ail: shihang@uich.edu Departent of Industrial and Operations Engineering, The University of Michigan, Ann Arbor, MI 48109 Ibalance Estiation for Speed-Varying
BALLISTIC PENDULUM. EXPERIMENT: Measuring the Projectile Speed Consider a steel ball of mass
 BALLISTIC PENDULUM INTRODUCTION: In this experient you will use the principles of conservation of oentu and energy to deterine the speed of a horizontally projected ball and use this speed to predict the
BALLISTIC PENDULUM INTRODUCTION: In this experient you will use the principles of conservation of oentu and energy to deterine the speed of a horizontally projected ball and use this speed to predict the
International Journal of Scientific & Engineering Research, Volume 5, Issue 7, July-2014 ISSN IJSER
 International Journal of Scientific & Engineering Research, Volue 5, Issue 7, July-4 ISSN 9-558 74 Advanced Dynaics & Control Lab Dept. of Mech Engg. CET, Kerala, India rajanakash@gail.co Dept. of Mech
International Journal of Scientific & Engineering Research, Volue 5, Issue 7, July-4 ISSN 9-558 74 Advanced Dynaics & Control Lab Dept. of Mech Engg. CET, Kerala, India rajanakash@gail.co Dept. of Mech
Tutorial Exercises: Incorporating constraints
 Tutorial Exercises: Incorporating constraints 1. A siple pendulu of length l ass is suspended fro a pivot of ass M that is free to slide on a frictionless wire frae in the shape of a parabola y = ax. The
Tutorial Exercises: Incorporating constraints 1. A siple pendulu of length l ass is suspended fro a pivot of ass M that is free to slide on a frictionless wire frae in the shape of a parabola y = ax. The
Applying Experienced Self-Tuning PID Controllers to Position Control of Slider Crank Mechanisms
 (00/7) 7 80 Applying Experienced Self-Tuning Controllers to osition Control of Slider Crank Mechaniss Chih-Cheng ao cckao@cc.kyit.edu.tw epartent of Electrical Engineering ao Yuan nstitute of Technology
(00/7) 7 80 Applying Experienced Self-Tuning Controllers to osition Control of Slider Crank Mechaniss Chih-Cheng ao cckao@cc.kyit.edu.tw epartent of Electrical Engineering ao Yuan nstitute of Technology
821. Study on analysis method for deepwater TTR coupled vibration of parameter vibration and vortex-induced vibration
 81. Study on analysis ethod for deepwater TTR coupled vibration of paraeter vibration and vortex-induced vibration Wu Xue-Min 1, Huang Wei-Ping Shandong Key aboratory of Ocean Engineering, Ocean University
81. Study on analysis ethod for deepwater TTR coupled vibration of paraeter vibration and vortex-induced vibration Wu Xue-Min 1, Huang Wei-Ping Shandong Key aboratory of Ocean Engineering, Ocean University
Neural Dynamic Optimization for Control Systems Part III: Applications
 502 IEEE TRANSACTIONS ON SYSTEMS, MAN, AND CYBERNETICS PART B: CYBERNETICS, VOL. 31, NO. 4, AUGUST 2001 Neural Dynaic Optiization for Control Systes Part III: Applications Chang-Yun Seong, Meber, IEEE,
502 IEEE TRANSACTIONS ON SYSTEMS, MAN, AND CYBERNETICS PART B: CYBERNETICS, VOL. 31, NO. 4, AUGUST 2001 Neural Dynaic Optiization for Control Systes Part III: Applications Chang-Yun Seong, Meber, IEEE,
CALIFORNIA INSTITUTE OF TECHNOLOGY
 CALIFORNIA INSIUE OF ECHNOLOGY Control and Dynaical Systes Course Project CDS 270 Instructor: Eugene Lavretsky, eugene.lavretsky@boeing.co Sring 2007 Project Outline: his roject consists of two flight
CALIFORNIA INSIUE OF ECHNOLOGY Control and Dynaical Systes Course Project CDS 270 Instructor: Eugene Lavretsky, eugene.lavretsky@boeing.co Sring 2007 Project Outline: his roject consists of two flight
DRAFT. Memo. Contents. To whom it may concern SVN: Jan Mooiman +31 (0) nl
 nl") Meo To To who it ay concern Date Reference Nuber of pages 219-1-16 SVN: 5744 22 Fro Direct line E-ail Jan Mooian +31 )88 335 8568 jan.ooian@deltares nl +31 6 4691 4571 Subject PID controller ass-spring-daper
Meo To To who it ay concern Date Reference Nuber of pages 219-1-16 SVN: 5744 22 Fro Direct line E-ail Jan Mooian +31 )88 335 8568 jan.ooian@deltares nl +31 6 4691 4571 Subject PID controller ass-spring-daper
Department of Physics Preliminary Exam January 3 6, 2006
 Departent of Physics Preliinary Exa January 3 6, 2006 Day 1: Classical Mechanics Tuesday, January 3, 2006 9:00 a.. 12:00 p.. Instructions: 1. Write the answer to each question on a separate sheet of paper.
Departent of Physics Preliinary Exa January 3 6, 2006 Day 1: Classical Mechanics Tuesday, January 3, 2006 9:00 a.. 12:00 p.. Instructions: 1. Write the answer to each question on a separate sheet of paper.
THE EFFECT OF SOLID PARTICLE SIZE UPON TIME AND SEDIMENTATION RATE
 Bulletin of the Transilvania University of Braşov Series II: Forestry Wood Industry Agricultural Food Engineering Vol. 5 (54) No. 1-1 THE EFFECT OF SOLID PARTICLE SIZE UPON TIME AND SEDIMENTATION RATE
Bulletin of the Transilvania University of Braşov Series II: Forestry Wood Industry Agricultural Food Engineering Vol. 5 (54) No. 1-1 THE EFFECT OF SOLID PARTICLE SIZE UPON TIME AND SEDIMENTATION RATE
Reducing Vibration and Providing Robustness with Multi-Input Shapers
 29 Aerican Control Conference Hyatt Regency Riverfront, St. Louis, MO, USA June -2, 29 WeA6.4 Reducing Vibration and Providing Robustness with Multi-Input Shapers Joshua Vaughan and Willia Singhose Abstract
29 Aerican Control Conference Hyatt Regency Riverfront, St. Louis, MO, USA June -2, 29 WeA6.4 Reducing Vibration and Providing Robustness with Multi-Input Shapers Joshua Vaughan and Willia Singhose Abstract
(6) B NN (x, k) = Tp 2 M 1
 B NN (x, k) = Tp 2 M 1") MMAR 26 12th IEEE International Conference on Methods and Models in Autoation and Robotics 28-31 August 26 Międzyzdroje, Poland Synthesis of Sliding Mode Control of Robot with Neural Networ Model Jaub
MMAR 26 12th IEEE International Conference on Methods and Models in Autoation and Robotics 28-31 August 26 Międzyzdroje, Poland Synthesis of Sliding Mode Control of Robot with Neural Networ Model Jaub
ON THE TWO-LEVEL PRECONDITIONING IN LEAST SQUARES METHOD
 PROCEEDINGS OF THE YEREVAN STATE UNIVERSITY Physical and Matheatical Sciences 04,, p. 7 5 ON THE TWO-LEVEL PRECONDITIONING IN LEAST SQUARES METHOD M a t h e a t i c s Yu. A. HAKOPIAN, R. Z. HOVHANNISYAN
PROCEEDINGS OF THE YEREVAN STATE UNIVERSITY Physical and Matheatical Sciences 04,, p. 7 5 ON THE TWO-LEVEL PRECONDITIONING IN LEAST SQUARES METHOD M a t h e a t i c s Yu. A. HAKOPIAN, R. Z. HOVHANNISYAN
2.9 Feedback and Feedforward Control
 2.9 Feedback and Feedforward Control M. F. HORDESKI (985) B. G. LIPTÁK (995) F. G. SHINSKEY (970, 2005) Feedback control is the action of oving a anipulated variable in response to a deviation or error
2.9 Feedback and Feedforward Control M. F. HORDESKI (985) B. G. LIPTÁK (995) F. G. SHINSKEY (970, 2005) Feedback control is the action of oving a anipulated variable in response to a deviation or error
Control of Brushless DC Motor with Direct Torque and Indirect Flux using SVPWM Technique
 Indian Journal of Science and Technology, Vol 8(2), DOI: 10.17485/ijst/2015/v8i2/71211, Septeber 2015 ISSN (Print) : 0974-6846 ISSN (Online) : 0974-5645 Control of Brushless DC Motor with Direct Torque
Indian Journal of Science and Technology, Vol 8(2), DOI: 10.17485/ijst/2015/v8i2/71211, Septeber 2015 ISSN (Print) : 0974-6846 ISSN (Online) : 0974-5645 Control of Brushless DC Motor with Direct Torque
An Adaptive UKF Algorithm for the State and Parameter Estimations of a Mobile Robot
 Vol. 34, No. 1 ACTA AUTOMATICA SINICA January, 2008 An Adaptive UKF Algorith for the State and Paraeter Estiations of a Mobile Robot SONG Qi 1, 2 HAN Jian-Da 1 Abstract For iproving the estiation accuracy
Vol. 34, No. 1 ACTA AUTOMATICA SINICA January, 2008 An Adaptive UKF Algorith for the State and Paraeter Estiations of a Mobile Robot SONG Qi 1, 2 HAN Jian-Da 1 Abstract For iproving the estiation accuracy
Motion Analysis of Euler s Disk
 Motion Analysis of Euler s Disk Katsuhiko Yaada Osaka University) Euler s Disk is a nae of a scientific toy and its otion is the sae as a spinning coin. In this study, a siple atheatical odel is proposed
Motion Analysis of Euler s Disk Katsuhiko Yaada Osaka University) Euler s Disk is a nae of a scientific toy and its otion is the sae as a spinning coin. In this study, a siple atheatical odel is proposed
H inf. Loop Shaping Robust Control vs. Classical PI(D) Control: A case study on the Longitudinal Dynamics of Hezarfen UAV
 Control: A case study on the Longitudinal Dynamics of Hezarfen UAV") Proceedings of the 2nd WSEAS International Conference on Dynamical Systems and Control, Bucharest, Romania, October 16-17, 2006 105 H inf. Loop Shaping Robust Control vs. Classical PI(D) Control: A case
Proceedings of the 2nd WSEAS International Conference on Dynamical Systems and Control, Bucharest, Romania, October 16-17, 2006 105 H inf. Loop Shaping Robust Control vs. Classical PI(D) Control: A case
Physics Dynamics: Forces. Science and Mathematics Education Research Group
 F FA ACULTY C U L T Y OF O F EDUCATION E D U C A T I O N Departent of Curriculu and Pedagogy Physics Dynaics: Forces Science and Matheatics Education Research Group Supported by UBC Teaching and Learning
F FA ACULTY C U L T Y OF O F EDUCATION E D U C A T I O N Departent of Curriculu and Pedagogy Physics Dynaics: Forces Science and Matheatics Education Research Group Supported by UBC Teaching and Learning
Dynamic Surface Control Techniques Applied to Horizontal Position Control of a Quadrotor
 216 2th International Conference on Syste Theory, Control and Coputing (ICSTCC, October 13-15, Sinaia, Roania Dynaic Surface Control Techniques Applied to Horizontal Position Control of a Quadrotor Zhilong
216 2th International Conference on Syste Theory, Control and Coputing (ICSTCC, October 13-15, Sinaia, Roania Dynaic Surface Control Techniques Applied to Horizontal Position Control of a Quadrotor Zhilong
AN APPLICATION OF CUBIC B-SPLINE FINITE ELEMENT METHOD FOR THE BURGERS EQUATION
 Aksan, E..: An Applıcatıon of Cubıc B-Splıne Fınıte Eleent Method for... THERMAL SCIECE: Year 8, Vol., Suppl., pp. S95-S S95 A APPLICATIO OF CBIC B-SPLIE FIITE ELEMET METHOD FOR THE BRGERS EQATIO by Eine
Aksan, E..: An Applıcatıon of Cubıc B-Splıne Fınıte Eleent Method for... THERMAL SCIECE: Year 8, Vol., Suppl., pp. S95-S S95 A APPLICATIO OF CBIC B-SPLIE FIITE ELEMET METHOD FOR THE BRGERS EQATIO by Eine
EFFECT OF MATERIAL PROPERTIES ON VIBRATIONS OF NONSYMMETRICAL AXIALLY LOADED THIN-WALLED EULER-BERNOULLI BEAMS
 Matheatical and Coputational Applications, Vol. 5, No., pp. 96-07, 00. Association for Scientific Research EFFECT OF MATERIAL PROPERTIES ON VIBRATIONS OF NONSYMMETRICAL AXIALLY LOADED THIN-WALLED EULER-BERNOULLI
Matheatical and Coputational Applications, Vol. 5, No., pp. 96-07, 00. Association for Scientific Research EFFECT OF MATERIAL PROPERTIES ON VIBRATIONS OF NONSYMMETRICAL AXIALLY LOADED THIN-WALLED EULER-BERNOULLI
Moment of inertia and torsional vibrations (Item No.: P )
") Moent of inertia and torsional vibrations (Ite No.: P2133100) Curricular Relevance Area of Expertise: Physics Education Level: University Topic: Mechanics Subtopic: Static Equilibriu and Elasticity Experient:
Moent of inertia and torsional vibrations (Ite No.: P2133100) Curricular Relevance Area of Expertise: Physics Education Level: University Topic: Mechanics Subtopic: Static Equilibriu and Elasticity Experient:
Architectural issues in the control of tall multiple-input multiple-output plants
 Preprints of the 19th World Congress The International Federation of Autoatic Control Architectural issues in the control of tall ultiple-input ultiple-output plants Pedro Albertos Mario E. Salgado Departent
Preprints of the 19th World Congress The International Federation of Autoatic Control Architectural issues in the control of tall ultiple-input ultiple-output plants Pedro Albertos Mario E. Salgado Departent
DESIGN OF THE DIE PROFILE FOR THE INCREMENTAL RADIAL FORGING PROCESS *
 IJST, Transactions of Mechanical Engineering, Vol. 39, No. M1, pp 89-100 Printed in The Islaic Republic of Iran, 2015 Shira University DESIGN OF THE DIE PROFILE FOR THE INCREMENTAL RADIAL FORGING PROCESS
IJST, Transactions of Mechanical Engineering, Vol. 39, No. M1, pp 89-100 Printed in The Islaic Republic of Iran, 2015 Shira University DESIGN OF THE DIE PROFILE FOR THE INCREMENTAL RADIAL FORGING PROCESS
Wall Juggling of one Ball by Robot Manipulator with Visual Servo
 Juggling of one Ball by obot Manipulator with Visual Servo Akira Nakashia Yosuke Kobayashi Yoshikazu Hayakawa Mechanical Science and Engineering, Graduate School of Engineering, Nagoya University, Furo-cho,
Juggling of one Ball by obot Manipulator with Visual Servo Akira Nakashia Yosuke Kobayashi Yoshikazu Hayakawa Mechanical Science and Engineering, Graduate School of Engineering, Nagoya University, Furo-cho,
Studying Large Scale System Using Decentralized Control
 Studyin Lare Scale Syste Usin Decentralized Control MRHOJJAI, SAKRAMINEJAD, MRAZMDIDEH Mechanic Electronic Institute, Junior Collee of asa, IRAN hojatir@ailco, sakrain@ailco, ahdiehlady@yahooco Abstract:
Studyin Lare Scale Syste Usin Decentralized Control MRHOJJAI, SAKRAMINEJAD, MRAZMDIDEH Mechanic Electronic Institute, Junior Collee of asa, IRAN hojatir@ailco, sakrain@ailco, ahdiehlady@yahooco Abstract:
Adaptive Trim and Trajectory Following for a Tilt-Rotor Tricopter Ahmad Ansari, Anna Prach, and Dennis S. Bernstein
 7 American Control Conference Sheraton Seattle Hotel May 4 6, 7, Seattle, USA Adaptive Trim and Trajectory Following for a Tilt-Rotor Tricopter Ahmad Ansari, Anna Prach, and Dennis S. Bernstein Abstract
7 American Control Conference Sheraton Seattle Hotel May 4 6, 7, Seattle, USA Adaptive Trim and Trajectory Following for a Tilt-Rotor Tricopter Ahmad Ansari, Anna Prach, and Dennis S. Bernstein Abstract
ASSIGNMENT BOOKLET Bachelor s Degree Programme (B.Sc./B.A./B.Com.) MATHEMATICAL MODELLING
 MATHEMATICAL MODELLING") ASSIGNMENT BOOKLET Bachelor s Degree Prograe (B.Sc./B.A./B.Co.) MTE-14 MATHEMATICAL MODELLING Valid fro 1 st January, 18 to 1 st Deceber, 18 It is copulsory to subit the Assignent before filling in the
ASSIGNMENT BOOKLET Bachelor s Degree Prograe (B.Sc./B.A./B.Co.) MTE-14 MATHEMATICAL MODELLING Valid fro 1 st January, 18 to 1 st Deceber, 18 It is copulsory to subit the Assignent before filling in the
Analysis and Implementation of a Hardware-in-the-Loop Simulation
 DINAME 27 - Proceedings of the XVII International Syposiu on Dynaic Probles of Mechanics A. T. Fleury, D. A. Rade, P. R. G. Kurka (Editors), ABCM, São Sebastião, SP, Brail, March 5-, 27 Analysis and Ipleentation
DINAME 27 - Proceedings of the XVII International Syposiu on Dynaic Probles of Mechanics A. T. Fleury, D. A. Rade, P. R. G. Kurka (Editors), ABCM, São Sebastião, SP, Brail, March 5-, 27 Analysis and Ipleentation
Accuracy of the Scaling Law for Experimental Natural Frequencies of Rectangular Thin Plates
 The 9th Conference of Mechanical Engineering Network of Thailand 9- October 005, Phuket, Thailand Accuracy of the caling Law for Experiental Natural Frequencies of Rectangular Thin Plates Anawat Na songkhla
The 9th Conference of Mechanical Engineering Network of Thailand 9- October 005, Phuket, Thailand Accuracy of the caling Law for Experiental Natural Frequencies of Rectangular Thin Plates Anawat Na songkhla
MSEC MODELING OF DEGRADATION PROCESSES TO OBTAIN AN OPTIMAL SOLUTION FOR MAINTENANCE AND PERFORMANCE
 Proceeding of the ASME 9 International Manufacturing Science and Engineering Conference MSEC9 October 4-7, 9, West Lafayette, Indiana, USA MSEC9-8466 MODELING OF DEGRADATION PROCESSES TO OBTAIN AN OPTIMAL
Proceeding of the ASME 9 International Manufacturing Science and Engineering Conference MSEC9 October 4-7, 9, West Lafayette, Indiana, USA MSEC9-8466 MODELING OF DEGRADATION PROCESSES TO OBTAIN AN OPTIMAL
Basic concept of dynamics 3 (Dynamics of a rigid body)
") Vehicle Dynaics (Lecture 3-3) Basic concept of dynaics 3 (Dynaics of a rigid body) Oct. 1, 2015 김성수 Vehicle Dynaics Model q How to describe vehicle otion? Need Reference fraes and Coordinate systes 2 Equations
Vehicle Dynaics (Lecture 3-3) Basic concept of dynaics 3 (Dynaics of a rigid body) Oct. 1, 2015 김성수 Vehicle Dynaics Model q How to describe vehicle otion? Need Reference fraes and Coordinate systes 2 Equations
Adaptive Stabilization of a Class of Nonlinear Systems With Nonparametric Uncertainty
 IEEE TRANSACTIONS ON AUTOMATIC CONTROL, VOL. 46, NO. 11, NOVEMBER 2001 1821 Adaptive Stabilization of a Class of Nonlinear Systes With Nonparaetric Uncertainty Aleander V. Roup and Dennis S. Bernstein
IEEE TRANSACTIONS ON AUTOMATIC CONTROL, VOL. 46, NO. 11, NOVEMBER 2001 1821 Adaptive Stabilization of a Class of Nonlinear Systes With Nonparaetric Uncertainty Aleander V. Roup and Dennis S. Bernstein
Qualitative Modelling of Time Series Using Self-Organizing Maps: Application to Animal Science
 Proceedings of the 6th WSEAS International Conference on Applied Coputer Science, Tenerife, Canary Islands, Spain, Deceber 16-18, 2006 183 Qualitative Modelling of Tie Series Using Self-Organizing Maps:
Proceedings of the 6th WSEAS International Conference on Applied Coputer Science, Tenerife, Canary Islands, Spain, Deceber 16-18, 2006 183 Qualitative Modelling of Tie Series Using Self-Organizing Maps:
Dynamics and Control Preliminary Examination Topics
 Dynamics and Control Preliminary Examination Topics 1. Particle and Rigid Body Dynamics Meirovitch, Leonard; Methods of Analytical Dynamics, McGraw-Hill, Inc New York, NY, 1970 Chapters 1-5 2. Atmospheric
Dynamics and Control Preliminary Examination Topics 1. Particle and Rigid Body Dynamics Meirovitch, Leonard; Methods of Analytical Dynamics, McGraw-Hill, Inc New York, NY, 1970 Chapters 1-5 2. Atmospheric
Department of Physics, Sri Venkateswara University, Tirupati Range Operations, Satish Dhawan Space Centre SHAR, ISRO, Sriharikota
 Trajectory Estiation of a Satellite Launch Vehicle Using Unscented Kalan Filter fro Noisy Radar Measureents R.Varaprasad S.V. Bhaskara Rao D.Narayana Rao V. Seshagiri Rao Range Operations, Satish Dhawan
Trajectory Estiation of a Satellite Launch Vehicle Using Unscented Kalan Filter fro Noisy Radar Measureents R.Varaprasad S.V. Bhaskara Rao D.Narayana Rao V. Seshagiri Rao Range Operations, Satish Dhawan
Aggressive Maneuvering Flight Tests of a Miniature Robotic Helicopter
 Aggressive Maneuvering Flight Tests of a Miniature Robotic Helicopter Vladislav Gavrilets, Ioannis Martinos, Bernard Mettler, and Eric Feron Massachusetts Institute of Technology, Cambridge MA 2139, USA
Aggressive Maneuvering Flight Tests of a Miniature Robotic Helicopter Vladislav Gavrilets, Ioannis Martinos, Bernard Mettler, and Eric Feron Massachusetts Institute of Technology, Cambridge MA 2139, USA
1 (40) Gravitational Systems Two heavy spherical (radius 0.05R) objects are located at fixed positions along
 Gravitational Systems Two heavy spherical (radius 0.05R) objects are located at fixed positions along") (40) Gravitational Systes Two heavy spherical (radius 0.05) objects are located at fixed positions along 2M 2M 0 an axis in space. The first ass is centered at r = 0 and has a ass of 2M. The second ass
(40) Gravitational Systes Two heavy spherical (radius 0.05) objects are located at fixed positions along 2M 2M 0 an axis in space. The first ass is centered at r = 0 and has a ass of 2M. The second ass
Principal Component Analysis Based Fault Detection and Diagnosis of Active Magnetic Bearing System
 MIT International Journal of Mechanical Engineering, Vol. 5, No. 1, January 2015, pp. 01-05 1 Principal Coponent Analysis Based Fault Detection and Diagnosis of Active Magnetic Bearing Syste Mohaad Wasee
MIT International Journal of Mechanical Engineering, Vol. 5, No. 1, January 2015, pp. 01-05 1 Principal Coponent Analysis Based Fault Detection and Diagnosis of Active Magnetic Bearing Syste Mohaad Wasee
A Pulley System Apparatus for a Laboratory Experience in Dynamics
 A Pulley Syste Apparatus for a Laboratory Experience in Dynaics Chris J. Kobus and Yin-Ping Chang Oakland University, Rochester, MI 48309-4478 Eail: cjkobus@oakland.edu Abstract This paper describes a
A Pulley Syste Apparatus for a Laboratory Experience in Dynaics Chris J. Kobus and Yin-Ping Chang Oakland University, Rochester, MI 48309-4478 Eail: cjkobus@oakland.edu Abstract This paper describes a
ABSTRACT INTRODUCTION
 Wave Resistance Prediction of a Cataaran by Linearised Theory M.INSEL Faculty of Naval Architecture and Ocean Engineering, Istanbul Technical University, TURKEY A.F.MOLLAND, J.F.WELLICOME Departent of
Wave Resistance Prediction of a Cataaran by Linearised Theory M.INSEL Faculty of Naval Architecture and Ocean Engineering, Istanbul Technical University, TURKEY A.F.MOLLAND, J.F.WELLICOME Departent of
Investigating the Performance of Adaptive Methods in application to Autopilot of General aviation Aircraft
 I J C T A, 8(5), 2015, pp 2423-2431 International Science Press Investigating the Performance of Adaptive Methods in application to Autopilot of General aviation Aircraft V Rajesari 1 and L Padma Suresh
I J C T A, 8(5), 2015, pp 2423-2431 International Science Press Investigating the Performance of Adaptive Methods in application to Autopilot of General aviation Aircraft V Rajesari 1 and L Padma Suresh
Particle dynamics Physics 1A, UNSW
 1 Particle dynaics Physics 1A, UNSW Newton's laws: S & J: Ch 5.1 5.9, 6.1 force, ass, acceleration also weight Physclips Chapter 5 Friction - coefficients of friction Physclips Chapter 6 Hooke's Law Dynaics
1 Particle dynaics Physics 1A, UNSW Newton's laws: S & J: Ch 5.1 5.9, 6.1 force, ass, acceleration also weight Physclips Chapter 5 Friction - coefficients of friction Physclips Chapter 6 Hooke's Law Dynaics
Physics 139B Solutions to Homework Set 3 Fall 2009
 Physics 139B Solutions to Hoework Set 3 Fall 009 1. Consider a particle of ass attached to a rigid assless rod of fixed length R whose other end is fixed at the origin. The rod is free to rotate about
Physics 139B Solutions to Hoework Set 3 Fall 009 1. Consider a particle of ass attached to a rigid assless rod of fixed length R whose other end is fixed at the origin. The rod is free to rotate about
Data-Driven Imaging in Anisotropic Media
 18 th World Conference on Non destructive Testing, 16- April 1, Durban, South Africa Data-Driven Iaging in Anisotropic Media Arno VOLKER 1 and Alan HUNTER 1 TNO Stieltjesweg 1, 6 AD, Delft, The Netherlands
18 th World Conference on Non destructive Testing, 16- April 1, Durban, South Africa Data-Driven Iaging in Anisotropic Media Arno VOLKER 1 and Alan HUNTER 1 TNO Stieltjesweg 1, 6 AD, Delft, The Netherlands