Actuators & Mechanisms Actuator sizing
|
|
|
- Kathryn Carr
- 5 years ago
- Views:
Transcription



1 Course Code: MDP 454, Course Nae:, Second Seester 2014 Actuators & Mechaniss Actuator sizing
2 Contents - Modelling of Mechanical Syste - Mechaniss and Drives

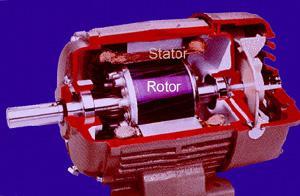
3 The study of Mechatronics systes can be divided into five areas of specialty: 1. Physical systes odeling 2. Sensors and actuators 3. Signals and systes 4. Coputers and logic systes 5. Software and data acquisition 6. Controller design - Logic controller - Microprocessor - Microcontroller - Prograable controller - PC based controller
4

5 Hardware, Software and Firware Hardware is the nae given to the physical devices and circuitry of the coputer. Software refers to the progras written for the coputer. Firware is the ter given to progras stored in ROMs or in Prograable devices which peranently keep their stored inforation. In other words, firware is the cobination of persistent eory and progra code and data stored in it. Typical exaples of devices containing firware are ebedded systes.






6 Robot Platfors (1) Indoor Robots DLR Gripper NASA Mars Rover Asio Huanoid Outdoor Robots Robot Base Station KUKA Manipulator




7 Robot Platfors (2) Aibo 4 legged Robot Qurio Huanoid Robocup Tea






8 Robot Platfors (3) Robot educational kits Robot sensors


9 Stepper, AC and DC otors






10 PLC and Microcontrollers





11 PC-based Measureent and Control Pc Board CAN BUS GPIB Serial/paralell




12 Engineering Software Matlab Labview HP-VEE IDL Linux Qt
13 Modeling of Mechanical Syste Displaceent Velocity Acceleration d k v a c F = k d F = c v F = a
14 Acceleration, Velocity and Displaceent M a v M d a v d Acceleration a a v v Velocity d d Tie (Siple vibration) Frequency (real achine) Displaceent

15 FFT Transforation Displaceent d = D sin n t Displaceent D Tie 1 T Frequency T Period, T n in [sec] k Frequency, f n = n = 2 f n = 1 T n k in [Hz = 1 /sec]
16 Aplitude FFT Transforation tie = + + Freq.(Hz)
17 Actuator sizing
18 Types of Motion and Motion Conversion Linear and Angular Motion The linear otion induced in a rigid object is governed by Newton s second law of otion F = a F is the resultant of all forces acting on the object, is the ass of the object and a is the resulting linear acceleration. The constant force F produces a constant acceleration a and oves the object of ass a certain distance s according to s =1/2 at 2 s is the displaceent and t is the tie Thus, the tie required to ove ass through distance s by eans of a constant force F is given by t 2s F
19 Types of Motion and Motion Conversion For angular otion, Newton s law reads:.. T J q T is the resultant of all torques acting on a ass rotating about a fixed axis, J is the oent of inertia of the ass about its axis of.. rotation and q is the angular acceleration and the angular displaceent equation analogous to that of linear otion is q =1/2 at 2 q is the angular displaceent. Solving for t yields. t 2Jq T
20 Exaple: Consider a rotary otion axis driven by an electric servo otor. The rotary load is directly connected to the otor shaft without any gear reducer (Fig. 1). The rotary load is a solid cylindrical shape ade of steel aterial, d=75, l=50, ρ=7800kg/ 3.The desired otion of the load is a periodic otion (Fig. 2). Fig. (1) Fig.(2)
21 Exaple (Cont.): The total distance to be traveled is 1/4 of a revolution. The period of otion is t cyc =250 sec., and dwell portion of it is t dw =100 sec., and the reaining part of the cycle tie is equally divided between acceleration, constant speed and deceleration periods, t a =t r =t d =50 sec. Deterine the required otor size for this application.
22 Displaceent 1 4 revolution θ d θ r θ total θ a 0 ta ta+tr ta+tr+td tcyc tie (sec.) θ' ax
23 Actuator Sizing Algorith: 1. Define the geoetric relationship between the actuator and load. In other words, select the type of otion transission echanis between the otor and load (N=reduction ratio). 2. Define the inertia and torque\force characteristics of the load and transission echaniss, i.e. define the inertia of the tool as well as the inertia of the gear reducer echaniss (J l, T l ). 3. Define the desired cyclic otion profile in the load speed versus tie (θ' l (t)). 4. Using the reflection equations developed above, calculate the reflected load inertia and torque/force (J eff, T eff ) that will effectively act on the actuator shaft as well as the desired otion at the actuator shaft (θ' (t)). 5. Guess a actuator/otor inertia fro an available list (catalog) (or ake the first calculation with zero otor inertia assuption), and calculate the torque history, T (t), for the desired otion cycle. Then calculate the peak torque and RMS torque fro T (t).
24 Actuator Sizing Algorith Cont.: 6. Check if the actuator size eets the required perforance in ters of peak and RMS torque, and axiu speed capacity (T p, T rs, θ' ax ). If the above selected actuator/otor fro the available list does not eet the requireents (i.e. too sall or too large), repeat the previous step by selecting a different otor. It should be noted that if a stepper otor is used, the torque capacity of the stepper otor is rated only in ters of the continuous rating, not peak. Therefore, the required peak and RMS torque ust be saller than the continuous torque capacity of the step otor. 7. Most servo otor continuous torque capacity rating is given for 25 o C abient teperature is different than 25 o C, the continuous (RMS) torque capacity of the otor should be derated using the following equation for a teperature, T T (25 rs rs o C) (155 Tep 130 o C)
25 Solution: 1) Deterine the Net inertia: where: J total =the total inertia reflected on the otor axis. J eff =the load inertias reflected on the otor shaft J =the otor rotor inertia. J eff J L J eff d r ( ( ) l) r ( (75 10 ) ) 75 ( ) kg. The ratio of otor inertia to reflected load inertia should be between one-toone and up to one-to-ten. J 1 1 ~ J 1 10 eff 2
26 The one-to-one is considered the optial atch (an ideal case), where the otor drives a purely inertia load and this inertia ratio results in iniu heating of the otor. Let us assue that we will pick a otor which has a rotor inertia sae as the load so that there is an ideal load and otor inertia atch. J J J total eff kg. J J eff kg. 2) Deterine the Net Torque: T( t) T ( t) T ( t) T ( t) total R 2 where: T total (t)=the total torque. T (t)=the torque generated by the otor. T R (t)=the resistive load torques on the syste, where T R (t) represent the su of all external torques. If the load torque is in the direction of assisting the otion, it will be negative, and net result will be the addition of two torques. The T R (t) ay include friction (T f ), gravity (T g ), and process related torque and forces (i.e. an assebly application ay required the echanis to provide a desired force pressure (T R ).
27 Displaceent T R ( t) 0 Ttotal ( t) T ( t) 3) Fundaental Equations for torque calculation: The torque and otion relationship is: J total q T ( J J ) q T eff The required torque to ove the load through the desired cyclic otion given in the figure can be calculated if the value of calculated. q 1 revolution 4 θ d θ r θ total θ a 0 ta ta+tr ta+tr+td tcyc tie (sec.)
28 4) Define the desired cyclic otion profile in the for of load (otor) speed versus tie: Fro the desired otion profile specification, we can deterine the velocity and acceleration of the actuator can be deliver using the kineatic relations ta tr td 50sec. 3 where: t a =acceleration ode tie. t r =constant speed ode tie. t d =deceleration speed ode tie.
29 Velocity Velocity Displaceent 1 revolution 4 θ d θ r θ total θ a 0 ta ta+tr ta+tr+td tcyc tie (sec.) θ' ax θ' ax tie (sec.) tie (sec.)
30 Velocity θ' ax tie (sec.) 418 rad/sec Acceleration diagra rad/sec 0 ta ta+tr ta+tr+td tcyc
31 Velocity Velocity Displaceent 5) Calculate the axiu speed q required to define this profile fro the otor: ax Fro displaceent otion profile: q 1 2 total q a q r q d revolution 4 note that: q( t) q( t) dt Fro velocity otion profile: 1 1 qtotal q ax ta q ax tr q ax t 2 2 ta 2t r td qtotal q ax ( ) 2 2q total q ax ta tr td q ax 20.9rad / sec q 60 n ax rp 2 d θ a 0 ta ta+tr ta+tr+td tcyc θ' θ' ax ax tie (sec.) tie (sec.) θ r θ d θ total tie (sec.)
32 Velocity 6) Calculate the angular acceleration : Note that: dq q dt Fro velocity otion profile: d q a q ax 0 q ax 20.9 q a dt ta 0 ta d q r q ax q ax 0 q r 0 dt ( t t ) t t d qd qd dt ( t 3 d a t r r 418rad a 0 qax t ) ( t a / sec r 2 t a r ) q t ax d 3 θ' ax 418rad / sec rad/sec tie (sec.) Acceleration diagra -418 rad/sec 0 ta ta+tr ta+tr+td tcyc
33 7) Use Fundaental equation for torque calculation at each ode: ( J T T J eff ) q T ( J J ) q N a eff a. ( J J ) q 0 T r eff r d ( J J eff ) q 0 ta ta+tr ta+tr+td tcyc d N. The torque diagra profile is shown in Fig rad/sec Acceleration diagra -418 rad/sec 8) The Peak torque (axiu torque): Hence, the peak torque requireent is T ax N N. Torque diagra N. 0 ta ta+tr ta+tr+td tcyc
34 9) T rs = root ean square torque over entire cycle: T rs t cyc 0 T t ( t) cycle 2 dt N. Torque diagra Fro torque diagra: N. T rs T a 2 t a T t a r 2 t t r r T t d d 2 t t d dw T 2 H t dw 0 ta ta+tr ta+tr+td tcyc where : T H =holding torque required in dwell ode=0 T rs (1.0032) Therefore, a otor which has rotor inertia of about kg. 2, axiu speed capability of 20.9 rad/sec(199.6 rp)or better, peak and RMS torque rating in the range of N. and N. range would be sufficient for the task ( ) N.
35 Mechaniss and Drives
36 Mechaniss and Drives


37 Rotating ass driven through a gear reducer Taking gear 1 as a free body gives The equivalent oent of inertia as
38 How to calculate equivalent inertia?
39
40

41 Conversion of Rotary to linear Motion 1. Rack and pinion drives, 2. Power (lead) screws, 3. Linkages. If the load attached to the rack has ass, then, total equivalent oent of inertia equals Conversely, if the rack is the driver, then the oent of inertia J1 attached to the pinion shaft ust be reflected back to the rack, and the equivalent linear inertia as felt by the pinion driving the rack is
42
43
44
45
46
47
48

49 Thank You For Your Attention! Questions?
H Technical Reference
 Reference H- H Reference... H-2 H-2 H-8 H-29... H-30... H-34... H-42... H-44 /... H-47... H-49 /... H-56 H- H-2 For Selecting a otor that satisfies the specifications required by your equipent is an iportant
Reference H- H Reference... H-2 H-2 H-8 H-29... H-30... H-34... H-42... H-44 /... H-47... H-49 /... H-56 H- H-2 For Selecting a otor that satisfies the specifications required by your equipent is an iportant
which proves the motion is simple harmonic. Now A = a 2 + b 2 = =
 Worked out Exaples. The potential energy function for the force between two atos in a diatoic olecules can be expressed as follows: a U(x) = b x / x6 where a and b are positive constants and x is the distance
Worked out Exaples. The potential energy function for the force between two atos in a diatoic olecules can be expressed as follows: a U(x) = b x / x6 where a and b are positive constants and x is the distance
Torsion Experiment. Encoder #3 ( 3 ) Third encoder/disk for Model 205a only. Figure 1: ECP Torsion Experiment
 Third encoder/disk for Model 205a only. Figure 1: ECP Torsion Experiment") Torsion Experient Introduction For the Torsion lab, there are two required experients to perfor and one extra credit assignent at the end. In experient 1, the syste paraeters need to be identified so that
Torsion Experient Introduction For the Torsion lab, there are two required experients to perfor and one extra credit assignent at the end. In experient 1, the syste paraeters need to be identified so that
m A 1 m mgd k m v ( C) AP Physics Multiple Choice Practice Oscillations
 AP Physics Multiple Choice Practice Oscillations") P Physics Multiple Choice Practice Oscillations. ass, attached to a horizontal assless spring with spring constant, is set into siple haronic otion. Its axiu displaceent fro its equilibriu position is.
P Physics Multiple Choice Practice Oscillations. ass, attached to a horizontal assless spring with spring constant, is set into siple haronic otion. Its axiu displaceent fro its equilibriu position is.
Lecture #8-3 Oscillations, Simple Harmonic Motion
 Lecture #8-3 Oscillations Siple Haronic Motion So far we have considered two basic types of otion: translation and rotation. But these are not the only two types of otion we can observe in every day life.
Lecture #8-3 Oscillations Siple Haronic Motion So far we have considered two basic types of otion: translation and rotation. But these are not the only two types of otion we can observe in every day life.
PH 221-1D Spring Oscillations. Lectures Chapter 15 (Halliday/Resnick/Walker, Fundamentals of Physics 9 th edition)
") PH 1-1D Spring 013 Oscillations Lectures 35-37 Chapter 15 (Halliday/Resnick/Walker, Fundaentals of Physics 9 th edition) 1 Chapter 15 Oscillations In this chapter we will cover the following topics: Displaceent,
PH 1-1D Spring 013 Oscillations Lectures 35-37 Chapter 15 (Halliday/Resnick/Walker, Fundaentals of Physics 9 th edition) 1 Chapter 15 Oscillations In this chapter we will cover the following topics: Displaceent,
2.003 Engineering Dynamics Problem Set 2 Solutions
 .003 Engineering Dynaics Proble Set Solutions This proble set is priarily eant to give the student practice in describing otion. This is the subject of kineatics. It is strongly recoended that you study
.003 Engineering Dynaics Proble Set Solutions This proble set is priarily eant to give the student practice in describing otion. This is the subject of kineatics. It is strongly recoended that you study
Periodic Motion is everywhere
 Lecture 19 Goals: Chapter 14 Interrelate the physics and atheatics of oscillations. Draw and interpret oscillatory graphs. Learn the concepts of phase and phase constant. Understand and use energy conservation
Lecture 19 Goals: Chapter 14 Interrelate the physics and atheatics of oscillations. Draw and interpret oscillatory graphs. Learn the concepts of phase and phase constant. Understand and use energy conservation
ME Machine Design I. FINAL EXAM. OPEN BOOK AND CLOSED NOTES. Friday, May 8th, 2009
 ME 5 - Machine Design I Spring Seester 009 Nae Lab. Div. FINAL EXAM. OPEN BOOK AND LOSED NOTES. Friday, May 8th, 009 Please use the blank paper for your solutions. Write on one side of the paper only.
ME 5 - Machine Design I Spring Seester 009 Nae Lab. Div. FINAL EXAM. OPEN BOOK AND LOSED NOTES. Friday, May 8th, 009 Please use the blank paper for your solutions. Write on one side of the paper only.
Physics 2210 Fall smartphysics 20 Conservation of Angular Momentum 21 Simple Harmonic Motion 11/23/2015
 Physics 2210 Fall 2015 sartphysics 20 Conservation of Angular Moentu 21 Siple Haronic Motion 11/23/2015 Exa 4: sartphysics units 14-20 Midter Exa 2: Day: Fri Dec. 04, 2015 Tie: regular class tie Section
Physics 2210 Fall 2015 sartphysics 20 Conservation of Angular Moentu 21 Siple Haronic Motion 11/23/2015 Exa 4: sartphysics units 14-20 Midter Exa 2: Day: Fri Dec. 04, 2015 Tie: regular class tie Section
TUTORIAL 1 SIMPLE HARMONIC MOTION. Instructor: Kazumi Tolich
 TUTORIAL 1 SIMPLE HARMONIC MOTION Instructor: Kazui Tolich About tutorials 2 Tutorials are conceptual exercises that should be worked on in groups. Each slide will consist of a series of questions that
TUTORIAL 1 SIMPLE HARMONIC MOTION Instructor: Kazui Tolich About tutorials 2 Tutorials are conceptual exercises that should be worked on in groups. Each slide will consist of a series of questions that
Definition of Work, The basics
 Physics 07 Lecture 16 Lecture 16 Chapter 11 (Work) v Eploy conservative and non-conservative forces v Relate force to potential energy v Use the concept of power (i.e., energy per tie) Chapter 1 v Define
Physics 07 Lecture 16 Lecture 16 Chapter 11 (Work) v Eploy conservative and non-conservative forces v Relate force to potential energy v Use the concept of power (i.e., energy per tie) Chapter 1 v Define
CHECKLIST. r r. Newton s Second Law. natural frequency ω o (rad.s -1 ) (Eq ) a03/p1/waves/waves doc 9:19 AM 29/03/05 1
 (Eq ) a03/p1/waves/waves doc 9:19 AM 29/03/05 1") PHYS12 Physics 1 FUNDAMENTALS Module 3 OSCILLATIONS & WAVES Text Physics by Hecht Chapter 1 OSCILLATIONS Sections: 1.5 1.6 Exaples: 1.6 1.7 1.8 1.9 CHECKLIST Haronic otion, periodic otion, siple haronic
PHYS12 Physics 1 FUNDAMENTALS Module 3 OSCILLATIONS & WAVES Text Physics by Hecht Chapter 1 OSCILLATIONS Sections: 1.5 1.6 Exaples: 1.6 1.7 1.8 1.9 CHECKLIST Haronic otion, periodic otion, siple haronic
Technical Guide for Servo Motor Selection
 Technical Guide for Servo otor Selection CS_Servo Selection_TG_E_3_1 Servo otor Selection Software Use your PC to select a Servo otor "otor Selection Program for Windows" o you always feel "Calculation
Technical Guide for Servo otor Selection CS_Servo Selection_TG_E_3_1 Servo otor Selection Software Use your PC to select a Servo otor "otor Selection Program for Windows" o you always feel "Calculation
Modeling & Analysis of the International Space Station
 Modeling & Analysis of the International Space Station 1 Physical Syste Solar Alpha Rotary Joints Physical Syste Rotor Stator Gear Train Solar Array Inboard Body Outboard Body +x Solar Array 3 Physical
Modeling & Analysis of the International Space Station 1 Physical Syste Solar Alpha Rotary Joints Physical Syste Rotor Stator Gear Train Solar Array Inboard Body Outboard Body +x Solar Array 3 Physical
5/09/06 PHYSICS 213 Exam #1 NAME FEYNMAN Please write down your name also on the back side of the last page
 5/09/06 PHYSICS 13 Exa #1 NAME FEYNMAN Please write down your nae also on the back side of the last page 1 he figure shows a horizontal planks of length =50 c, and ass M= 1 Kg, pivoted at one end. he planks
5/09/06 PHYSICS 13 Exa #1 NAME FEYNMAN Please write down your nae also on the back side of the last page 1 he figure shows a horizontal planks of length =50 c, and ass M= 1 Kg, pivoted at one end. he planks
1 (40) Gravitational Systems Two heavy spherical (radius 0.05R) objects are located at fixed positions along
 Gravitational Systems Two heavy spherical (radius 0.05R) objects are located at fixed positions along") (40) Gravitational Systes Two heavy spherical (radius 0.05) objects are located at fixed positions along 2M 2M 0 an axis in space. The first ass is centered at r = 0 and has a ass of 2M. The second ass
(40) Gravitational Systes Two heavy spherical (radius 0.05) objects are located at fixed positions along 2M 2M 0 an axis in space. The first ass is centered at r = 0 and has a ass of 2M. The second ass
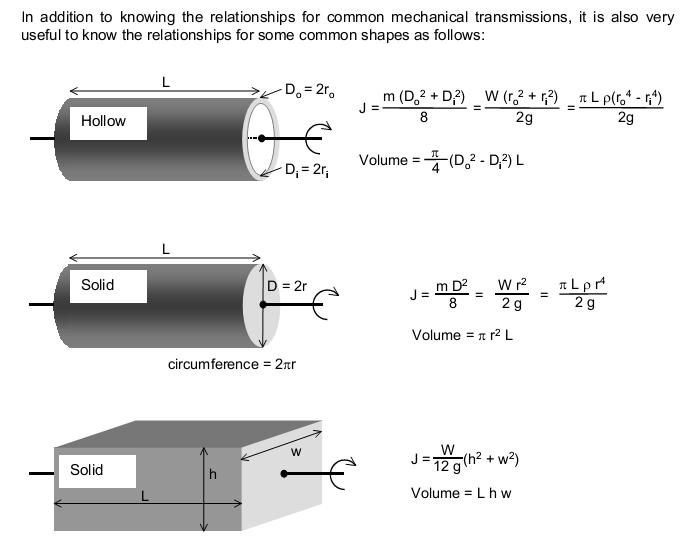
4.5 Shaft Misallignments and Flexible Couplings
 222 CHAPTER 4. MECHANISMS FOR MOTION TRANSMISSION 4.5 Shaft Misallignments and Flexible Couplings Mechanical systems always involve two or more shafts to transfer motion. There is always a finite accuracy
222 CHAPTER 4. MECHANISMS FOR MOTION TRANSMISSION 4.5 Shaft Misallignments and Flexible Couplings Mechanical systems always involve two or more shafts to transfer motion. There is always a finite accuracy
Physics 218 Exam 3 Fall 2010, Sections
 Physics 28 Exa 3 Fall 200, Sections 52-524 Do not fill out the inforation below until instructed to do so! Nae Signature Student ID E-ail Section # : SOUTIONS ules of the exa:. You have the full class
Physics 28 Exa 3 Fall 200, Sections 52-524 Do not fill out the inforation below until instructed to do so! Nae Signature Student ID E-ail Section # : SOUTIONS ules of the exa:. You have the full class
EN40: Dynamics and Vibrations. Final Examination Monday May : 2pm-5pm
 EN40: Dynaics and Vibrations Final Exaination Monday May 13 013: p-5p School of Engineering Brown University NAME: General Instructions No collaboration of any kind is peritted on this exaination. You
EN40: Dynaics and Vibrations Final Exaination Monday May 13 013: p-5p School of Engineering Brown University NAME: General Instructions No collaboration of any kind is peritted on this exaination. You
Question 1. [14 Marks]
![Question 1. [14 Marks]](/thumbs/88/116022373.jpg "Question 1. [14 Marks]") 6 Question 1. [14 Marks] R r T! A string is attached to the dru (radius r) of a spool (radius R) as shown in side and end views here. (A spool is device for storing string, thread etc.) A tension T is
6 Question 1. [14 Marks] R r T! A string is attached to the dru (radius r) of a spool (radius R) as shown in side and end views here. (A spool is device for storing string, thread etc.) A tension T is
Simple Harmonic Motion
 Reading: Chapter 15 Siple Haronic Motion Siple Haronic Motion Frequency f Period T T 1. f Siple haronic otion x ( t) x cos( t ). Aplitude x Phase Angular frequency Since the otion returns to its initial
Reading: Chapter 15 Siple Haronic Motion Siple Haronic Motion Frequency f Period T T 1. f Siple haronic otion x ( t) x cos( t ). Aplitude x Phase Angular frequency Since the otion returns to its initial
Supplementary Information for Design of Bending Multi-Layer Electroactive Polymer Actuators
 Suppleentary Inforation for Design of Bending Multi-Layer Electroactive Polyer Actuators Bavani Balakrisnan, Alek Nacev, and Elisabeth Sela University of Maryland, College Park, Maryland 074 1 Analytical
Suppleentary Inforation for Design of Bending Multi-Layer Electroactive Polyer Actuators Bavani Balakrisnan, Alek Nacev, and Elisabeth Sela University of Maryland, College Park, Maryland 074 1 Analytical
Chapter 2: Introduction to Damping in Free and Forced Vibrations
 Chapter 2: Introduction to Daping in Free and Forced Vibrations This chapter ainly deals with the effect of daping in two conditions like free and forced excitation of echanical systes. Daping plays an
Chapter 2: Introduction to Daping in Free and Forced Vibrations This chapter ainly deals with the effect of daping in two conditions like free and forced excitation of echanical systes. Daping plays an
16.30/31 September 24, 2010 Prof. J. P. How and Prof. E. Frazzoli Due: October 15, 2010 T.A. B. Luders /31 Lab #1
 16.30/31 Septeber 24, 2010 Prof. J. P. How and Prof. E. Frazzoli Due: October 15, 2010 T.A. B. Luders 16.30/31 Lab #1 1 Introduction The Quanser helicopter is a echanical device that eulates the flight
16.30/31 Septeber 24, 2010 Prof. J. P. How and Prof. E. Frazzoli Due: October 15, 2010 T.A. B. Luders 16.30/31 Lab #1 1 Introduction The Quanser helicopter is a echanical device that eulates the flight
Physics 207 Lecture 18. Physics 207, Lecture 18, Nov. 3 Goals: Chapter 14
 Physics 07, Lecture 18, Nov. 3 Goals: Chapter 14 Interrelate the physics and atheatics of oscillations. Draw and interpret oscillatory graphs. Learn the concepts of phase and phase constant. Understand
Physics 07, Lecture 18, Nov. 3 Goals: Chapter 14 Interrelate the physics and atheatics of oscillations. Draw and interpret oscillatory graphs. Learn the concepts of phase and phase constant. Understand
Q5 We know that a mass at the end of a spring when displaced will perform simple m harmonic oscillations with a period given by T = 2!
 Chapter 4.1 Q1 n oscillation is any otion in which the displaceent of a particle fro a fixed point keeps changing direction and there is a periodicity in the otion i.e. the otion repeats in soe way. In
Chapter 4.1 Q1 n oscillation is any otion in which the displaceent of a particle fro a fixed point keeps changing direction and there is a periodicity in the otion i.e. the otion repeats in soe way. In
Spinning Disk and Chladni Plates
 Spinning Disk and Chladni Plates Subitted By MD MARUFUR RAHMAN Msc Sustainable Energy Systes Beng(Hons) Mechanical Engineering Bsc Coputer Science and Engineering Table of Contents Spinning Disk... 3 1.0
Spinning Disk and Chladni Plates Subitted By MD MARUFUR RAHMAN Msc Sustainable Energy Systes Beng(Hons) Mechanical Engineering Bsc Coputer Science and Engineering Table of Contents Spinning Disk... 3 1.0
PY241 Solutions Set 9 (Dated: November 7, 2002)
") PY241 Solutions Set 9 (Dated: Noveber 7, 2002) 9-9 At what displaceent of an object undergoing siple haronic otion is the agnitude greatest for the... (a) velocity? The velocity is greatest at x = 0, the
PY241 Solutions Set 9 (Dated: Noveber 7, 2002) 9-9 At what displaceent of an object undergoing siple haronic otion is the agnitude greatest for the... (a) velocity? The velocity is greatest at x = 0, the
National 5 Summary Notes
 North Berwick High School Departent of Physics National 5 Suary Notes Unit 3 Energy National 5 Physics: Electricity and Energy 1 Throughout the Course, appropriate attention should be given to units, prefixes
North Berwick High School Departent of Physics National 5 Suary Notes Unit 3 Energy National 5 Physics: Electricity and Energy 1 Throughout the Course, appropriate attention should be given to units, prefixes
T m. Fapplied. Thur Oct 29. ω = 2πf f = (ω/2π) T = 1/f. k m. ω =
 T = 1/f. k m. ω =") Thur Oct 9 Assignent 10 Mass-Spring Kineatics (x, v, a, t) Dynaics (F,, a) Tie dependence Energy Pendulu Daping and Resonances x Acos( ωt) = v = Aω sin( ωt) a = Aω cos( ωt) ω = spring k f spring = 1 k
Thur Oct 9 Assignent 10 Mass-Spring Kineatics (x, v, a, t) Dynaics (F,, a) Tie dependence Energy Pendulu Daping and Resonances x Acos( ωt) = v = Aω sin( ωt) a = Aω cos( ωt) ω = spring k f spring = 1 k
L2 IntroSurvey. EIEN20 Design of Electrical Machines, IEA, Today s goal. L2: Variety of electrical machines.
 L: Variety of electrical achines Machine construction: an overview Transforer is it achine too? Today s goal ntroduction to achine construction Constructional layouts and echanical arrangeents Supply &
L: Variety of electrical achines Machine construction: an overview Transforer is it achine too? Today s goal ntroduction to achine construction Constructional layouts and echanical arrangeents Supply &
Now multiply the left-hand-side by ω and the right-hand side by dδ/dt (recall ω= dδ/dt) to get:
 to get:") Equal Area Criterion.0 Developent of equal area criterion As in previous notes, all powers are in per-unit. I want to show you the equal area criterion a little differently than the book does it. Let s
Equal Area Criterion.0 Developent of equal area criterion As in previous notes, all powers are in per-unit. I want to show you the equal area criterion a little differently than the book does it. Let s
Physics 41 HW Set 1 Chapter 15 Serway 7 th Edition
 Physics HW Set Chapter 5 Serway 7 th Edition Conceptual Questions:, 3, 5,, 6, 9 Q53 You can take φ = π, or equally well, φ = π At t= 0, the particle is at its turning point on the negative side of equilibriu,
Physics HW Set Chapter 5 Serway 7 th Edition Conceptual Questions:, 3, 5,, 6, 9 Q53 You can take φ = π, or equally well, φ = π At t= 0, the particle is at its turning point on the negative side of equilibriu,
MATHEMATICAL MODEL OF THE ENERGETIC CONSUMPTION FOR SOIL DIGGING MACHINES IN GREENHOUSES
 Bulletin of the Transilvania University of Braşov Vol. 3 (5) - 00 Series II: Forestry Wood Industry Agricultural Food Engineering MATHEMATICAL MODEL OF THE ENERGETIC CONSUMPTION FOR SOIL DIGGING MACHINES
Bulletin of the Transilvania University of Braşov Vol. 3 (5) - 00 Series II: Forestry Wood Industry Agricultural Food Engineering MATHEMATICAL MODEL OF THE ENERGETIC CONSUMPTION FOR SOIL DIGGING MACHINES
Servo Motor Selection Flow Chart
 Servo otor Selection Flow Chart START Selection Has the machine Been Selected? YES NO Explanation etermine the size, mass, coefficient of References friction, and external forces of all the moving part
Servo otor Selection Flow Chart START Selection Has the machine Been Selected? YES NO Explanation etermine the size, mass, coefficient of References friction, and external forces of all the moving part
Chapter 11 Simple Harmonic Motion
 Chapter 11 Siple Haronic Motion "We are to adit no ore causes of natural things than such as are both true and sufficient to explain their appearances." Isaac Newton 11.1 Introduction to Periodic Motion
Chapter 11 Siple Haronic Motion "We are to adit no ore causes of natural things than such as are both true and sufficient to explain their appearances." Isaac Newton 11.1 Introduction to Periodic Motion
Problem Set 14: Oscillations AP Physics C Supplementary Problems
 Proble Set 14: Oscillations AP Physics C Suppleentary Probles 1 An oscillator consists of a bloc of ass 050 g connected to a spring When set into oscillation with aplitude 35 c, it is observed to repeat
Proble Set 14: Oscillations AP Physics C Suppleentary Probles 1 An oscillator consists of a bloc of ass 050 g connected to a spring When set into oscillation with aplitude 35 c, it is observed to repeat
Part IA Paper 1: Mechanical Engineering MECHANICAL VIBRATIONS Examples paper 3
 ENGINEERING Part IA Paper 1: Mechanical Engineering MECHANICAL VIBRATIONS Exaples paper 3 IRST YEAR Straightforward questions are ared with a Tripos standard questions are ared *. Systes with two or ore
ENGINEERING Part IA Paper 1: Mechanical Engineering MECHANICAL VIBRATIONS Exaples paper 3 IRST YEAR Straightforward questions are ared with a Tripos standard questions are ared *. Systes with two or ore
Department of Physics Preliminary Exam January 3 6, 2006
 Departent of Physics Preliinary Exa January 3 6, 2006 Day 1: Classical Mechanics Tuesday, January 3, 2006 9:00 a.. 12:00 p.. Instructions: 1. Write the answer to each question on a separate sheet of paper.
Departent of Physics Preliinary Exa January 3 6, 2006 Day 1: Classical Mechanics Tuesday, January 3, 2006 9:00 a.. 12:00 p.. Instructions: 1. Write the answer to each question on a separate sheet of paper.
CHAPTER 15: Vibratory Motion
 CHAPTER 15: Vibratory Motion courtesy of Richard White courtesy of Richard White 2.) 1.) Two glaring observations can be ade fro the graphic on the previous slide: 1.) The PROJECTION of a point on a circle
CHAPTER 15: Vibratory Motion courtesy of Richard White courtesy of Richard White 2.) 1.) Two glaring observations can be ade fro the graphic on the previous slide: 1.) The PROJECTION of a point on a circle
PHYSICS 2210 Fall Exam 4 Review 12/02/2015
 PHYSICS 10 Fall 015 Exa 4 Review 1/0/015 (yf09-049) A thin, light wire is wrapped around the ri of a unifor disk of radius R=0.80, as shown. The disk rotates without friction about a stationary horizontal
PHYSICS 10 Fall 015 Exa 4 Review 1/0/015 (yf09-049) A thin, light wire is wrapped around the ri of a unifor disk of radius R=0.80, as shown. The disk rotates without friction about a stationary horizontal
MECHANICS OF MATERIALS Design of a Transmission Shaft
 Design of a Transission Shaft If power is transferred to and fro the shaft by ygears or sprocket wheels, the shaft is subjected to transverse loading as well as shear loading. Noral stresses due to transverse
Design of a Transission Shaft If power is transferred to and fro the shaft by ygears or sprocket wheels, the shaft is subjected to transverse loading as well as shear loading. Noral stresses due to transverse
Chapter 28: Alternating Current
 hapter 8: Alternating urrent Phasors and Alternating urrents Alternating current (A current) urrent which varies sinusoidally in tie is called alternating current (A) as opposed to direct current (D).
hapter 8: Alternating urrent Phasors and Alternating urrents Alternating current (A current) urrent which varies sinusoidally in tie is called alternating current (A) as opposed to direct current (D).
= T. Oscillations and Waves. Example of an Oscillating System IB 12 IB 12
 Oscillation: the vibration of an object Oscillations and Waves Eaple of an Oscillating Syste A ass oscillates on a horizontal spring without friction as shown below. At each position, analyze its displaceent,
Oscillation: the vibration of an object Oscillations and Waves Eaple of an Oscillating Syste A ass oscillates on a horizontal spring without friction as shown below. At each position, analyze its displaceent,
Chapter 11: Vibration Isolation of the Source [Part I]
![Chapter 11: Vibration Isolation of the Source [Part I]](/thumbs/89/99791370.jpg "Chapter 11: Vibration Isolation of the Source [Part I]") Chapter : Vibration Isolation of the Source [Part I] Eaple 3.4 Consider the achine arrangeent illustrated in figure 3.. An electric otor is elastically ounted, by way of identical isolators, to a - thick
Chapter : Vibration Isolation of the Source [Part I] Eaple 3.4 Consider the achine arrangeent illustrated in figure 3.. An electric otor is elastically ounted, by way of identical isolators, to a - thick
In the session you will be divided into groups and perform four separate experiments:
 Mechanics Lab (Civil Engineers) Nae (please print): Tutor (please print): Lab group: Date of lab: Experients In the session you will be divided into groups and perfor four separate experients: (1) air-track
Mechanics Lab (Civil Engineers) Nae (please print): Tutor (please print): Lab group: Date of lab: Experients In the session you will be divided into groups and perfor four separate experients: (1) air-track
Physics with Health Science Applications Ch. 3 pg. 56
 Physics with Health Science Applications Ch. 3 pg. 56 Questions 3.4 The plane is accelerating forward. The seat is connected to the plane and is accelerated forward. The back of the seat applies a forward
Physics with Health Science Applications Ch. 3 pg. 56 Questions 3.4 The plane is accelerating forward. The seat is connected to the plane and is accelerated forward. The back of the seat applies a forward
9 HOOKE S LAW AND SIMPLE HARMONIC MOTION
 Experient 9 HOOKE S LAW AND SIMPLE HARMONIC MOTION Objectives 1. Verify Hoo s law,. Measure the force constant of a spring, and 3. Measure the period of oscillation of a spring-ass syste and copare it
Experient 9 HOOKE S LAW AND SIMPLE HARMONIC MOTION Objectives 1. Verify Hoo s law,. Measure the force constant of a spring, and 3. Measure the period of oscillation of a spring-ass syste and copare it
Physics 120 Final Examination
 Physics 120 Final Exaination 12 August, 1998 Nae Tie: 3 hours Signature Calculator and one forula sheet allowed Student nuber Show coplete solutions to questions 3 to 8. This exaination has 8 questions.
Physics 120 Final Exaination 12 August, 1998 Nae Tie: 3 hours Signature Calculator and one forula sheet allowed Student nuber Show coplete solutions to questions 3 to 8. This exaination has 8 questions.
Chapter 4 FORCES AND NEWTON S LAWS OF MOTION PREVIEW QUICK REFERENCE. Important Terms
 Chapter 4 FORCES AND NEWTON S LAWS OF MOTION PREVIEW Dynaics is the study o the causes o otion, in particular, orces. A orce is a push or a pull. We arrange our knowledge o orces into three laws orulated
Chapter 4 FORCES AND NEWTON S LAWS OF MOTION PREVIEW Dynaics is the study o the causes o otion, in particular, orces. A orce is a push or a pull. We arrange our knowledge o orces into three laws orulated
2009 Academic Challenge
 009 Acadeic Challenge PHYSICS TEST - REGIONAL This Test Consists of 5 Questions Physics Test Production Tea Len Stor, Eastern Illinois University Author/Tea Leader Doug Brandt, Eastern Illinois University
009 Acadeic Challenge PHYSICS TEST - REGIONAL This Test Consists of 5 Questions Physics Test Production Tea Len Stor, Eastern Illinois University Author/Tea Leader Doug Brandt, Eastern Illinois University
PH 221-2A Fall Waves - I. Lectures Chapter 16 (Halliday/Resnick/Walker, Fundamentals of Physics 9 th edition)
") PH 1-A Fall 014 Waves - I Lectures 4-5 Chapter 16 (Halliday/Resnick/Walker, Fundaentals of Physics 9 th edition) 1 Chapter 16 Waves I In this chapter we will start the discussion on wave phenoena. We will
PH 1-A Fall 014 Waves - I Lectures 4-5 Chapter 16 (Halliday/Resnick/Walker, Fundaentals of Physics 9 th edition) 1 Chapter 16 Waves I In this chapter we will start the discussion on wave phenoena. We will
Physics 2107 Oscillations using Springs Experiment 2
 PY07 Oscillations using Springs Experient Physics 07 Oscillations using Springs Experient Prelab Read the following bacground/setup and ensure you are failiar with the concepts and theory required for
PY07 Oscillations using Springs Experient Physics 07 Oscillations using Springs Experient Prelab Read the following bacground/setup and ensure you are failiar with the concepts and theory required for
UNIVERSITY OF SASKATCHEWAN Department of Physics and Engineering Physics
 UNIVERSITY OF SASKATCHEWAN Departent of Physics and Engineering Physics 017 Saskatchewan High School Physics Scholarship Copetition Wednesday May 10, 017 Tie allowed: 90 inutes This copetition is based
UNIVERSITY OF SASKATCHEWAN Departent of Physics and Engineering Physics 017 Saskatchewan High School Physics Scholarship Copetition Wednesday May 10, 017 Tie allowed: 90 inutes This copetition is based
Some Perspective. Forces and Newton s Laws
 Soe Perspective The language of Kineatics provides us with an efficient ethod for describing the otion of aterial objects, and we ll continue to ake refineents to it as we introduce additional types of
Soe Perspective The language of Kineatics provides us with an efficient ethod for describing the otion of aterial objects, and we ll continue to ake refineents to it as we introduce additional types of
Modern Control Systems (ECEG-4601) Instructor: Andinet Negash. Chapter 1 Lecture 3: State Space, II
 Instructor: Andinet Negash. Chapter 1 Lecture 3: State Space, II") Modern Control Systes (ECEG-46) Instructor: Andinet Negash Chapter Lecture 3: State Space, II Eaples Eaple 5: control o liquid levels: in cheical plants, it is oten necessary to aintain the levels o liquids.
Modern Control Systes (ECEG-46) Instructor: Andinet Negash Chapter Lecture 3: State Space, II Eaples Eaple 5: control o liquid levels: in cheical plants, it is oten necessary to aintain the levels o liquids.
Work, Energy and Momentum
 Work, Energy and Moentu Work: When a body oves a distance d along straight line, while acted on by a constant force of agnitude F in the sae direction as the otion, the work done by the force is tered
Work, Energy and Moentu Work: When a body oves a distance d along straight line, while acted on by a constant force of agnitude F in the sae direction as the otion, the work done by the force is tered
Systems of Masses. 1. Ignoring friction, calculate the acceleration of the system below and the tension in the rope. and (4.0)(9.80) 39.
(9.80) 39.") Systes of Masses. Ignoring friction, calculate the acceleration of the syste below and the tension in the rope. Drawing individual free body diagras we get 4.0kg 7.0kg g 9.80 / s a?? g and g (4.0)(9.80)
Systes of Masses. Ignoring friction, calculate the acceleration of the syste below and the tension in the rope. Drawing individual free body diagras we get 4.0kg 7.0kg g 9.80 / s a?? g and g (4.0)(9.80)
WileyPLUS Assignment 3. Next Week
 WileyPLUS Assignent 3 Chapters 6 & 7 Due Wednesday, Noveber 11 at 11 p Next Wee No labs of tutorials Reebrance Day holiday on Wednesday (no classes) 24 Displaceent, x Mass on a spring ωt = 2π x = A cos
WileyPLUS Assignent 3 Chapters 6 & 7 Due Wednesday, Noveber 11 at 11 p Next Wee No labs of tutorials Reebrance Day holiday on Wednesday (no classes) 24 Displaceent, x Mass on a spring ωt = 2π x = A cos
Chapter 1: Basics of Vibrations for Simple Mechanical Systems
 Chapter 1: Basics of Vibrations for Siple Mechanical Systes Introduction: The fundaentals of Sound and Vibrations are part of the broader field of echanics, with strong connections to classical echanics,
Chapter 1: Basics of Vibrations for Siple Mechanical Systes Introduction: The fundaentals of Sound and Vibrations are part of the broader field of echanics, with strong connections to classical echanics,
F = 0. x o F = -k x o v = 0 F = 0. F = k x o v = 0 F = 0. x = 0 F = 0. F = -k x 1. PHYSICS 151 Notes for Online Lecture 2.4.
 PHYSICS 151 Notes for Online Lecture.4 Springs, Strings, Pulleys, and Connected Objects Hook s Law F = 0 F = -k x 1 x = 0 x = x 1 Let s start with a horizontal spring, resting on a frictionless table.
PHYSICS 151 Notes for Online Lecture.4 Springs, Strings, Pulleys, and Connected Objects Hook s Law F = 0 F = -k x 1 x = 0 x = x 1 Let s start with a horizontal spring, resting on a frictionless table.
Axis. Axis. Axis. Solid cylinder (or disk) about. Hoop about. Annular cylinder (or ring) about central axis. central axis.
 about. Hoop about. Annular cylinder (or ring) about central axis. central axis.") Instructor(s): Acosta, inzler PHYSICS DEPATMENT PHY 048, Spring 04 Final Exa March 4, 04 Nae (print, last first): Signature: On y honor, I have neither given nor received unauthorized aid on this exaination.
Instructor(s): Acosta, inzler PHYSICS DEPATMENT PHY 048, Spring 04 Final Exa March 4, 04 Nae (print, last first): Signature: On y honor, I have neither given nor received unauthorized aid on this exaination.
Name: Partner(s): Date: Angular Momentum
: Date: Angular Momentum") Nae: Partner(s): Date: Angular Moentu 1. Purpose: In this lab, you will use the principle of conservation of angular oentu to easure the oent of inertia of various objects. Additionally, you develop a
Nae: Partner(s): Date: Angular Moentu 1. Purpose: In this lab, you will use the principle of conservation of angular oentu to easure the oent of inertia of various objects. Additionally, you develop a
Simple Harmonic Motion
 Siple Haronic Motion Physics Enhanceent Prograe for Gifted Students The Hong Kong Acadey for Gifted Education and Departent of Physics, HKBU Departent of Physics Siple haronic otion In echanical physics,
Siple Haronic Motion Physics Enhanceent Prograe for Gifted Students The Hong Kong Acadey for Gifted Education and Departent of Physics, HKBU Departent of Physics Siple haronic otion In echanical physics,
NAME NUMBER SEC. PHYCS 101 SUMMER 2001/2002 FINAL EXAME:24/8/2002. PART(I) 25% PART(II) 15% PART(III)/Lab 8% ( ) 2 Q2 Q3 Total 40%
 25% PART(II) 15% PART(III)/Lab 8% ( ) 2 Q2 Q3 Total 40%") NAME NUMER SEC. PHYCS 101 SUMMER 2001/2002 FINAL EXAME:24/8/2002 PART(I) 25% PART(II) 15% PART(III)/Lab 8% ( ) 2.5 Q1 ( ) 2 Q2 Q3 Total 40% Use the followings: Magnitude of acceleration due to gravity
NAME NUMER SEC. PHYCS 101 SUMMER 2001/2002 FINAL EXAME:24/8/2002 PART(I) 25% PART(II) 15% PART(III)/Lab 8% ( ) 2.5 Q1 ( ) 2 Q2 Q3 Total 40% Use the followings: Magnitude of acceleration due to gravity
MECHANICS OF MATERIALS
 00 The cgraw-hill Copanies, Inc. All rights reserved. Third E CHAPTER 8 Principle ECHANICS OF ATERIALS Ferdinand P. Beer E. Russell Johnston, Jr. John T. DeWolf Lecture Notes: J. Walt Oler Texas Tech University
00 The cgraw-hill Copanies, Inc. All rights reserved. Third E CHAPTER 8 Principle ECHANICS OF ATERIALS Ferdinand P. Beer E. Russell Johnston, Jr. John T. DeWolf Lecture Notes: J. Walt Oler Texas Tech University
EN40: Dynamics and Vibrations. Midterm Examination Tuesday March
 EN4: Dynaics and ibrations Midter Exaination Tuesday Marc 4 14 Scool of Engineering Brown University NAME: General Instructions No collaboration of any kind is peritted on tis exaination. You ay bring
EN4: Dynaics and ibrations Midter Exaination Tuesday Marc 4 14 Scool of Engineering Brown University NAME: General Instructions No collaboration of any kind is peritted on tis exaination. You ay bring
Applying Experienced Self-Tuning PID Controllers to Position Control of Slider Crank Mechanisms
 (00/7) 7 80 Applying Experienced Self-Tuning Controllers to osition Control of Slider Crank Mechaniss Chih-Cheng ao cckao@cc.kyit.edu.tw epartent of Electrical Engineering ao Yuan nstitute of Technology
(00/7) 7 80 Applying Experienced Self-Tuning Controllers to osition Control of Slider Crank Mechaniss Chih-Cheng ao cckao@cc.kyit.edu.tw epartent of Electrical Engineering ao Yuan nstitute of Technology
This is a repository copy of Analytical optimisation of electromagnetic design of a linear (tubular) switched reluctance motor.
 switched reluctance motor.") This is a repository copy of Analytical optiisation of electroagnetic design of a linear (tubular) switched reluctance otor. White Rose Research Online URL for this paper: http://eprints.whiterose.ac.uk/907/
This is a repository copy of Analytical optiisation of electroagnetic design of a linear (tubular) switched reluctance otor. White Rose Research Online URL for this paper: http://eprints.whiterose.ac.uk/907/
Elastic Force: A Force Balance: Elastic & Gravitational Force: Force Example: Determining Spring Constant. Some Other Forces
 Energy Balance, Units & Proble Solving: Mechanical Energy Balance ABET Course Outcoes: 1. solve and docuent the solution of probles involving eleents or configurations not previously encountered (e) (e.g.
Energy Balance, Units & Proble Solving: Mechanical Energy Balance ABET Course Outcoes: 1. solve and docuent the solution of probles involving eleents or configurations not previously encountered (e) (e.g.
HYBRID ADAPTIVE FRICTION COMPENSATION OF INDIRECT DRIVE TRAINS
 Proceedings of the ASME 29 Dynaic Systes and Control Conference DSCC29 October 12-14, 29, Hollywood, California, USA DSCC29-2736 HYBRID ADAPTIVE FRICTION COMPENSATION OF INDIRECT DRIVE TRAINS Wenjie Chen
Proceedings of the ASME 29 Dynaic Systes and Control Conference DSCC29 October 12-14, 29, Hollywood, California, USA DSCC29-2736 HYBRID ADAPTIVE FRICTION COMPENSATION OF INDIRECT DRIVE TRAINS Wenjie Chen
Self-Erecting Inverted Pendulum: Swing up and Stabilization Control
 Self-Erecting Inverted Pendulu: Swing up and Stabilization Control S. McGilvray (Winner of the IEEE Life Meber ward for best paper fro the Central Canada Council for the IEEE Student Paper Contest, ) Contents
Self-Erecting Inverted Pendulu: Swing up and Stabilization Control S. McGilvray (Winner of the IEEE Life Meber ward for best paper fro the Central Canada Council for the IEEE Student Paper Contest, ) Contents
BEF BEF Chapter 2. Outline BASIC PRINCIPLES 09/10/2013. Introduction. Phasor Representation. Complex Power Triangle.
 BEF 5503 BEF 5503 Chapter BASC PRNCPLES Outline 1 3 4 5 6 7 8 9 ntroduction Phasor Representation Coplex Power Triangle Power Factor Coplex Power in AC Single Phase Circuits Coplex Power in Balanced Three-Phase
BEF 5503 BEF 5503 Chapter BASC PRNCPLES Outline 1 3 4 5 6 7 8 9 ntroduction Phasor Representation Coplex Power Triangle Power Factor Coplex Power in AC Single Phase Circuits Coplex Power in Balanced Three-Phase
XI PHYSICS M. AFFAN KHAN LECTURER PHYSICS, AKHSS, K. https://promotephysics.wordpress.com
 XI PHYSICS M. AFFAN KHAN LECTURER PHYSICS, AKHSS, K affan_414@live.co https://prootephysics.wordpress.co [MOTION] CHAPTER NO. 3 In this chapter we are going to discuss otion in one diension in which we
XI PHYSICS M. AFFAN KHAN LECTURER PHYSICS, AKHSS, K affan_414@live.co https://prootephysics.wordpress.co [MOTION] CHAPTER NO. 3 In this chapter we are going to discuss otion in one diension in which we
Subject Code: R13110/R13 I B. Tech I Semester Regular Examinations Jan./Feb ENGINEERING MECHANICS
 Set No - 1 I B. Tech I Seester Regular Exainations Jan./Feb. 2015 ENGINEERING MECHANICS (Coon to CE, ME, CSE, PCE, IT, Che E, Aero E, AME, Min E, PE, Metal E) Tie: 3 hours Max. Marks: 70 What is the principle
Set No - 1 I B. Tech I Seester Regular Exainations Jan./Feb. 2015 ENGINEERING MECHANICS (Coon to CE, ME, CSE, PCE, IT, Che E, Aero E, AME, Min E, PE, Metal E) Tie: 3 hours Max. Marks: 70 What is the principle
MECHANICS OF MATERIALS
 00 The McGraw-Hill Copanies, Inc. All rights reserved. T Edition CHAPTER MECHANICS OF MATERIALS Ferdinand P. Beer E. Russell Johnston, Jr. John T. DeWolf Lecture Notes: J. Walt Oler Texas Tech University
00 The McGraw-Hill Copanies, Inc. All rights reserved. T Edition CHAPTER MECHANICS OF MATERIALS Ferdinand P. Beer E. Russell Johnston, Jr. John T. DeWolf Lecture Notes: J. Walt Oler Texas Tech University
9. h = R. 10. h = 3 R
 Version PREVIEW Torque Chap. 8 sizeore (13756) 1 This print-out should have 3 questions. ultiple-choice questions ay continue on the next colun or page find all choices before answering. Note in the dropped
Version PREVIEW Torque Chap. 8 sizeore (13756) 1 This print-out should have 3 questions. ultiple-choice questions ay continue on the next colun or page find all choices before answering. Note in the dropped
ma x = -bv x + F rod.
 Notes on Dynaical Systes Dynaics is the study of change. The priary ingredients of a dynaical syste are its state and its rule of change (also soeties called the dynaic). Dynaical systes can be continuous
Notes on Dynaical Systes Dynaics is the study of change. The priary ingredients of a dynaical syste are its state and its rule of change (also soeties called the dynaic). Dynaical systes can be continuous
Massachusetts Institute of Technology Quantum Mechanics I (8.04) Spring 2005 Solutions to Problem Set 4
 Spring 2005 Solutions to Problem Set 4") Massachusetts Institute of Technology Quantu Mechanics I (8.04) Spring 2005 Solutions to Proble Set 4 By Kit Matan 1. X-ray production. (5 points) Calculate the short-wavelength liit for X-rays produced
Massachusetts Institute of Technology Quantu Mechanics I (8.04) Spring 2005 Solutions to Proble Set 4 By Kit Matan 1. X-ray production. (5 points) Calculate the short-wavelength liit for X-rays produced
26 Impulse and Momentum
 6 Ipulse and Moentu First, a Few More Words on Work and Energy, for Coparison Purposes Iagine a gigantic air hockey table with a whole bunch of pucks of various asses, none of which experiences any friction
6 Ipulse and Moentu First, a Few More Words on Work and Energy, for Coparison Purposes Iagine a gigantic air hockey table with a whole bunch of pucks of various asses, none of which experiences any friction
ANALYSIS OF HALL-EFFECT THRUSTERS AND ION ENGINES FOR EARTH-TO-MOON TRANSFER
 IEPC 003-0034 ANALYSIS OF HALL-EFFECT THRUSTERS AND ION ENGINES FOR EARTH-TO-MOON TRANSFER A. Bober, M. Guelan Asher Space Research Institute, Technion-Israel Institute of Technology, 3000 Haifa, Israel
IEPC 003-0034 ANALYSIS OF HALL-EFFECT THRUSTERS AND ION ENGINES FOR EARTH-TO-MOON TRANSFER A. Bober, M. Guelan Asher Space Research Institute, Technion-Israel Institute of Technology, 3000 Haifa, Israel
16.512, Rocket Propulsion Prof. Manuel Martinez-Sanchez Lecture 30: Dynamics of Turbopump Systems: The Shuttle Engine
 6.5, Rocket Propulsion Prof. Manuel Martinez-Sanchez Lecture 30: Dynaics of Turbopup Systes: The Shuttle Engine Dynaics of the Space Shuttle Main Engine Oxidizer Pressurization Subsystes Selected Sub-Model
6.5, Rocket Propulsion Prof. Manuel Martinez-Sanchez Lecture 30: Dynaics of Turbopup Systes: The Shuttle Engine Dynaics of the Space Shuttle Main Engine Oxidizer Pressurization Subsystes Selected Sub-Model
Question number 1 to 8 carries 2 marks each, 9 to 16 carries 4 marks each and 17 to 18 carries 6 marks each.
 IIT-JEE5-PH-1 FIITJEE Solutions to IITJEE 5 Mains Paper Tie: hours Physics Note: Question nuber 1 to 8 carries arks each, 9 to 16 carries 4 arks each and 17 to 18 carries 6 arks each. Q1. whistling train
IIT-JEE5-PH-1 FIITJEE Solutions to IITJEE 5 Mains Paper Tie: hours Physics Note: Question nuber 1 to 8 carries arks each, 9 to 16 carries 4 arks each and 17 to 18 carries 6 arks each. Q1. whistling train
Student Book pages
 Chapter 7 Review Student Boo pages 390 39 Knowledge. Oscillatory otion is otion that repeats itself at regular intervals. For exaple, a ass oscillating on a spring and a pendulu swinging bac and forth..
Chapter 7 Review Student Boo pages 390 39 Knowledge. Oscillatory otion is otion that repeats itself at regular intervals. For exaple, a ass oscillating on a spring and a pendulu swinging bac and forth..
Sensorless Control of Induction Motor Drive Using SVPWM - MRAS Speed Observer
 Journal of Eerging Trends in Engineering and Applied Sciences (JETEAS) 2 (3): 509-513 Journal Scholarlink of Eerging Research Trends Institute in Engineering Journals, 2011 and Applied (ISSN: 2141-7016)
Journal of Eerging Trends in Engineering and Applied Sciences (JETEAS) 2 (3): 509-513 Journal Scholarlink of Eerging Research Trends Institute in Engineering Journals, 2011 and Applied (ISSN: 2141-7016)
PHYS 1443 Section 003 Lecture #21 Wednesday, Nov. 19, 2003 Dr. Mystery Lecturer
 PHYS 443 Section 003 Lecture # Wednesday, Nov. 9, 003 Dr. Mystery Lecturer. Fluid Dyanics : Flow rate and Continuity Equation. Bernoulli s Equation 3. Siple Haronic Motion 4. Siple Bloc-Spring Syste 5.
PHYS 443 Section 003 Lecture # Wednesday, Nov. 9, 003 Dr. Mystery Lecturer. Fluid Dyanics : Flow rate and Continuity Equation. Bernoulli s Equation 3. Siple Haronic Motion 4. Siple Bloc-Spring Syste 5.
A body of unknown mass is attached to an ideal spring with force constant 123 N/m. It is found to vibrate with a frequency of
 Chapter 14 [ Edit ] Overview Suary View Diagnostics View Print View with Answers Chapter 14 Due: 11:59p on Sunday, Noveber 27, 2016 To understand how points are awarded, read the Grading Policy for this
Chapter 14 [ Edit ] Overview Suary View Diagnostics View Print View with Answers Chapter 14 Due: 11:59p on Sunday, Noveber 27, 2016 To understand how points are awarded, read the Grading Policy for this
4.7. Springs and Conservation of Energy. Conservation of Mechanical Energy
 Springs and Conservation of Energy Most drivers try to avoid collisions, but not at a deolition derby like the one shown in Figure 1. The point of a deolition derby is to crash your car into as any other
Springs and Conservation of Energy Most drivers try to avoid collisions, but not at a deolition derby like the one shown in Figure 1. The point of a deolition derby is to crash your car into as any other
Today s s topics are: Collisions and Momentum Conservation. Momentum Conservation
 Today s s topics are: Collisions and P (&E) Conservation Ipulsive Force Energy Conservation How can we treat such an ipulsive force? Energy Conservation Ipulsive Force and Ipulse [Exaple] an ipulsive force
Today s s topics are: Collisions and P (&E) Conservation Ipulsive Force Energy Conservation How can we treat such an ipulsive force? Energy Conservation Ipulsive Force and Ipulse [Exaple] an ipulsive force
High-Speed Smooth Cyclical Motion of a Hydraulic Cylinder
 846 1 th International Conference on Fleible Autoation and Intelligent Manufacturing 00, Dresden, Gerany High-Speed Sooth Cyclical Motion of a Hydraulic Cylinder Nebojsa I. Jaksic Departent of Industrial
846 1 th International Conference on Fleible Autoation and Intelligent Manufacturing 00, Dresden, Gerany High-Speed Sooth Cyclical Motion of a Hydraulic Cylinder Nebojsa I. Jaksic Departent of Industrial
FOUNDATION STUDIES EXAMINATIONS January 2016
 1 FOUNDATION STUDIES EXAMINATIONS January 2016 PHYSICS Seester 2 Exa July Fast Track Tie allowed 2 hours for writing 10 inutes for reading This paper consists of 4 questions printed on 11 pages. PLEASE
1 FOUNDATION STUDIES EXAMINATIONS January 2016 PHYSICS Seester 2 Exa July Fast Track Tie allowed 2 hours for writing 10 inutes for reading This paper consists of 4 questions printed on 11 pages. PLEASE
IDAN Shock Mount Isolation Vibration Study November 1, The operation of shock and vibration isolation base plate
 dr. Istvan Koller RTD USA BME Laboratory. Background In 998, Real Tie Devices USA, Inc. introduced a novel packaging concept for ebedded PC/04 odules to build Intelligent Data Acquisition Nodes. This syste,
dr. Istvan Koller RTD USA BME Laboratory. Background In 998, Real Tie Devices USA, Inc. introduced a novel packaging concept for ebedded PC/04 odules to build Intelligent Data Acquisition Nodes. This syste,
Kinetics of Rigid (Planar) Bodies
 Bodies") Kinetics of Rigi (Planar) Boies Types of otion Rectilinear translation Curvilinear translation Rotation about a fixe point eneral planar otion Kinetics of a Syste of Particles The center of ass for a syste
Kinetics of Rigi (Planar) Boies Types of otion Rectilinear translation Curvilinear translation Rotation about a fixe point eneral planar otion Kinetics of a Syste of Particles The center of ass for a syste
8.1 Force Laws Hooke s Law
 8.1 Force Laws There are forces that don't change appreciably fro one instant to another, which we refer to as constant in tie, and forces that don't change appreciably fro one point to another, which
8.1 Force Laws There are forces that don't change appreciably fro one instant to another, which we refer to as constant in tie, and forces that don't change appreciably fro one point to another, which
Robustness Experiments for a Planar Hopping Control System
 To appear in International Conference on Clibing and Walking Robots Septeber 22 Robustness Experients for a Planar Hopping Control Syste Kale Harbick and Gaurav S. Sukhate kale gaurav@robotics.usc.edu
To appear in International Conference on Clibing and Walking Robots Septeber 22 Robustness Experients for a Planar Hopping Control Syste Kale Harbick and Gaurav S. Sukhate kale gaurav@robotics.usc.edu
Physics 204A FINAL EXAM Chapters 1-14 Spring 2006
 Nae: Solve the following probles in the space provided Use the back of the page if needed Each proble is worth 0 points You ust show your work in a logical fashion starting with the correctly applied physical
Nae: Solve the following probles in the space provided Use the back of the page if needed Each proble is worth 0 points You ust show your work in a logical fashion starting with the correctly applied physical
Chapter 10 ACSS Power
 Objectives: Power concepts: instantaneous power, average power, reactive power, coplex power, power factor Relationships aong power concepts the power triangle Balancing power in AC circuits Condition
Objectives: Power concepts: instantaneous power, average power, reactive power, coplex power, power factor Relationships aong power concepts the power triangle Balancing power in AC circuits Condition
In this chapter we will start the discussion on wave phenomena. We will study the following topics:
 Chapter 16 Waves I In this chapter we will start the discussion on wave phenoena. We will study the following topics: Types of waves Aplitude, phase, frequency, period, propagation speed of a wave Mechanical
Chapter 16 Waves I In this chapter we will start the discussion on wave phenoena. We will study the following topics: Types of waves Aplitude, phase, frequency, period, propagation speed of a wave Mechanical
Two-Mass, Three-Spring Dynamic System Investigation Case Study
 Two-ass, Three-Spring Dynamic System Investigation Case Study easurements, Calculations, anufacturer's Specifications odel Parameter Identification Which Parameters to Identify? What Tests to Perform?
Two-ass, Three-Spring Dynamic System Investigation Case Study easurements, Calculations, anufacturer's Specifications odel Parameter Identification Which Parameters to Identify? What Tests to Perform?