A concentration fluctuation model for virtual testing of detection systems
|
|
|
- Oswald Copeland
- 5 years ago
- Views:
Transcription

1 A concentration fluctuation model for virtual testing of detection systems Presented by: Dr Martyn Bull and Dr Robert Gordon
2 Contents Rob Gordon - Overview Definition of concentration fluctuations Why model concentration fluctuations? Why do we need a better model? Martyn Bull Technical Approach Chosen Approach Initial results Future Work
3 Definition of Concentration Fluctuation The variation of concentration in space and time from an averaged distribution
4 Why Model Concentration Fluctuation (1) Growing need to evaluate sensor network functionality and performance Development and testing of complex processing algorithms entirely using field data can be expensive and impractical Processing algorithms will often be developed in parallel with hardware
5 Why Model Concentration Fluctuation (2) Therefore a need for: Realistic simulated challenge concentration fields Realistic simulated background fields Problem Definition To develop a model which will enable us to simulate the behaviour of detectors within a real plume
6 Existing Dispersion Model Approaches Gaussian puff models e.g. SCIPUFF, UDM Produce ensemble predictions of concentration, with estimates of variance Single Particle models e.g. NAME, FLEXPART Produce ensemble mean predictions of concentration CFD Dynamic CVD provides a detailed model but is computationally expensive Other technologies (e.g. LES, two particle models) Could provide a detailed model, but are computationally expensive
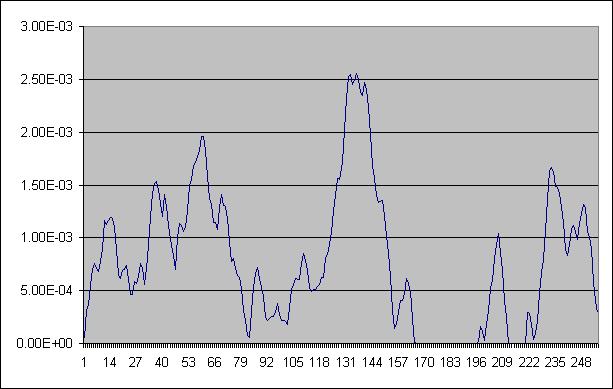
7 Ensemble Models An ensemble is an average of all possible model runs BUT an ensemble looks very different to a real cloud AND real background data is very different from a flat mean value If we train and design our system against ensemble simulations we cannot expect it to behave in the same manner in a to real plume.


8 Real plume vs. ensemble plume
9 Technical Approach
10 Fluctuation Characteristics (1) Concentration fluctuates around an ensemble mean value Fluctuations can be approximated by a clipped normal distribution In some cases concentration can fall to zero Fluctuations show a degree of temporal correlation i.e. the concentration at time T + dt is related to concentration at time T
11 Fluctuation Characteristics (2) Fluctuations show a degree of spatial correlation i.e. the concentration at a given location is correlated with the correlation at surrounding locations Spatial correlations have limited range depends on fluctuation length scale Correlation down-wind is different to correlation cross-wind Crosswind correlations have short range Downwind correlations have longer range and a time delay
12 Possible approaches (1) Meander model and gaussian puff model (Gifford, 1959) Produces large scale fluctuations but not small scale Markov chain (random walk) local concentration fluctuations Models small scale fluctuations but without spatial Spatial correlation forcing. (i.e. adding correlation to independent fluctuation models) Becomes an n-squared problem hence scales VERY badly on large scenarios
13 Possible approaches (2) Computational Fluid Dynamics Dynamic CVD could provide answers but very high computation cost Other technologies (e.g. LES, two particle models) Immature and un-validated for this domain of use Computationally expensive
14 Chosen approach the Fluctuation Model Use a validated dispersion model to provide ensemble predictions Concentration mean Concentration variance Fluctuation length scale Simulate a noise field separately Using variance and fluctuation length scale from dispersion model Recombine with ensemble mean afterwards
15 Concentration Fluctuation Model - Software Architecture Ensemble Dispersion Model Length Scale Variance Mean Noise Model Correlation Model Fluctuation Amplitude Signal Recombination Output
16 Model description (1) Noise Model Uses Hidden Markov Model (HMM) paradigm Underlying white noise field distributed over space Moves downwind with time Modified (mutated) with time Via stochastic cell-swapping Via individual random walk at pixel lebel
17 Model Description (2) Correlation Model Spatial filtering used to add in spatial correlation Temporal correlation emerges as a side effect Smoothing kernels: computed on startup based on image processing methods Input length scale determines selection of kernel at each location



18 Model Output (1) Downwind Fluctuation Correlation


19 Model Output (2) Crosswind Fluctuation Correlation
20 Model Output (3) Point release with zero background

21 Model Output (4) Point release with significant background
22 Key advantages Based on validated model Mean, and variance match the model Fluctuations match model predictions Also adds significant refinements Crosswind correlations low downwind correlations high time delay in downwind correlation
23 Current Model Status A standalone software module Developed in pure Java Straightforward system integration path Could be used in near-term to create virtual testing solutions for specific systems LIDAR Detector Arrays
24 Future work (1) Use in combination with puff model and a meander model Model would be restricted to synthesizing small-scale correlations giving faster computation Would provide greater fidelity close to source Multi-species background modeling With controllable correlation between species Extend model to give full 3D fields for some future applications Currently provides a two dimensional slice
25 Future work (2) Hardware implementation of model Compilation down to Field Programmable Gate Array (FPGA) hardware program Enhanced real-time performance Embedded implementation in detector hardware (e.g. LIDAR) For system firmware/software evaluation For operator training For exercise support

26 Questions?
Predicting concentration fluctuations with a puffparticle
 Int. J. Environment and Pollution, Vol. 16, Nos. 1 6, 2001 49 Predicting concentration fluctuations with a puffparticle model P. de Haan INFRAS, Muehlemattstr. 45, 3007 Bern, Switzerland e-mail: peter.dehaan@infras.ch
Int. J. Environment and Pollution, Vol. 16, Nos. 1 6, 2001 49 Predicting concentration fluctuations with a puffparticle model P. de Haan INFRAS, Muehlemattstr. 45, 3007 Bern, Switzerland e-mail: peter.dehaan@infras.ch
Different Criteria for Active Learning in Neural Networks: A Comparative Study
 Different Criteria for Active Learning in Neural Networks: A Comparative Study Jan Poland and Andreas Zell University of Tübingen, WSI - RA Sand 1, 72076 Tübingen, Germany Abstract. The field of active
Different Criteria for Active Learning in Neural Networks: A Comparative Study Jan Poland and Andreas Zell University of Tübingen, WSI - RA Sand 1, 72076 Tübingen, Germany Abstract. The field of active
Sequential Monte Carlo Methods for Bayesian Computation
 Sequential Monte Carlo Methods for Bayesian Computation A. Doucet Kyoto Sept. 2012 A. Doucet (MLSS Sept. 2012) Sept. 2012 1 / 136 Motivating Example 1: Generic Bayesian Model Let X be a vector parameter
Sequential Monte Carlo Methods for Bayesian Computation A. Doucet Kyoto Sept. 2012 A. Doucet (MLSS Sept. 2012) Sept. 2012 1 / 136 Motivating Example 1: Generic Bayesian Model Let X be a vector parameter
Modelling and forecasting of offshore wind power fluctuations with Markov-Switching models
 Modelling and forecasting of offshore wind power fluctuations with Markov-Switching models 02433 - Hidden Markov Models Pierre-Julien Trombe, Martin Wæver Pedersen, Henrik Madsen Course week 10 MWP, compiled
Modelling and forecasting of offshore wind power fluctuations with Markov-Switching models 02433 - Hidden Markov Models Pierre-Julien Trombe, Martin Wæver Pedersen, Henrik Madsen Course week 10 MWP, compiled
10. Hidden Markov Models (HMM) for Speech Processing. (some slides taken from Glass and Zue course)
 for Speech Processing. (some slides taken from Glass and Zue course)") 10. Hidden Markov Models (HMM) for Speech Processing (some slides taken from Glass and Zue course) Definition of an HMM The HMM are powerful statistical methods to characterize the observed samples of
10. Hidden Markov Models (HMM) for Speech Processing (some slides taken from Glass and Zue course) Definition of an HMM The HMM are powerful statistical methods to characterize the observed samples of
Application of a Bayesian Inference Method to Reconstruct Short-Range Atmospheric Dispersion Events
 Boise State University ScholarWorks Mechanical and Biomedical Engineering Faculty Publications and Presentations Department of Mechanical and Biomedical Engineering 7-4-010 Application of a Bayesian Inference
Boise State University ScholarWorks Mechanical and Biomedical Engineering Faculty Publications and Presentations Department of Mechanical and Biomedical Engineering 7-4-010 Application of a Bayesian Inference
Filtering and Edge Detection
 Filtering and Edge Detection Local Neighborhoods Hard to tell anything from a single pixel Example: you see a reddish pixel. Is this the object s color? Illumination? Noise? The next step in order of complexity
Filtering and Edge Detection Local Neighborhoods Hard to tell anything from a single pixel Example: you see a reddish pixel. Is this the object s color? Illumination? Noise? The next step in order of complexity
Assessing Atmospheric Releases of Hazardous Materials
 Assessing Atmospheric Releases of Hazardous Materials Nathan Platt and Jeffry Urban The Problem Atmospheric transport and dispersion (AT&D) models play an important role in the Department of Defense because
Assessing Atmospheric Releases of Hazardous Materials Nathan Platt and Jeffry Urban The Problem Atmospheric transport and dispersion (AT&D) models play an important role in the Department of Defense because
Probability Models in Electrical and Computer Engineering Mathematical models as tools in analysis and design Deterministic models Probability models
 Probability Models in Electrical and Computer Engineering Mathematical models as tools in analysis and design Deterministic models Probability models Statistical regularity Properties of relative frequency
Probability Models in Electrical and Computer Engineering Mathematical models as tools in analysis and design Deterministic models Probability models Statistical regularity Properties of relative frequency
Approximate Inference Part 1 of 2
 Approximate Inference Part 1 of 2 Tom Minka Microsoft Research, Cambridge, UK Machine Learning Summer School 2009 http://mlg.eng.cam.ac.uk/mlss09/ Bayesian paradigm Consistent use of probability theory
Approximate Inference Part 1 of 2 Tom Minka Microsoft Research, Cambridge, UK Machine Learning Summer School 2009 http://mlg.eng.cam.ac.uk/mlss09/ Bayesian paradigm Consistent use of probability theory
Approximate Inference Part 1 of 2
 Approximate Inference Part 1 of 2 Tom Minka Microsoft Research, Cambridge, UK Machine Learning Summer School 2009 http://mlg.eng.cam.ac.uk/mlss09/ 1 Bayesian paradigm Consistent use of probability theory
Approximate Inference Part 1 of 2 Tom Minka Microsoft Research, Cambridge, UK Machine Learning Summer School 2009 http://mlg.eng.cam.ac.uk/mlss09/ 1 Bayesian paradigm Consistent use of probability theory
Condensed Table of Contents for Introduction to Stochastic Search and Optimization: Estimation, Simulation, and Control by J. C.
 Condensed Table of Contents for Introduction to Stochastic Search and Optimization: Estimation, Simulation, and Control by J. C. Spall John Wiley and Sons, Inc., 2003 Preface... xiii 1. Stochastic Search
Condensed Table of Contents for Introduction to Stochastic Search and Optimization: Estimation, Simulation, and Control by J. C. Spall John Wiley and Sons, Inc., 2003 Preface... xiii 1. Stochastic Search
Bayesian Networks: Construction, Inference, Learning and Causal Interpretation. Volker Tresp Summer 2014
 Bayesian Networks: Construction, Inference, Learning and Causal Interpretation Volker Tresp Summer 2014 1 Introduction So far we were mostly concerned with supervised learning: we predicted one or several
Bayesian Networks: Construction, Inference, Learning and Causal Interpretation Volker Tresp Summer 2014 1 Introduction So far we were mostly concerned with supervised learning: we predicted one or several
Bayesian Networks BY: MOHAMAD ALSABBAGH
 Bayesian Networks BY: MOHAMAD ALSABBAGH Outlines Introduction Bayes Rule Bayesian Networks (BN) Representation Size of a Bayesian Network Inference via BN BN Learning Dynamic BN Introduction Conditional
Bayesian Networks BY: MOHAMAD ALSABBAGH Outlines Introduction Bayes Rule Bayesian Networks (BN) Representation Size of a Bayesian Network Inference via BN BN Learning Dynamic BN Introduction Conditional
Conversion from Linear to Circular Polarization and Stokes Parameters in FPGA. Koyel Das, Alan Roy, Gino Tuccari, Reinhard Keller
 Conversion from Linear to Circular Polarization and Stokes Parameters in FPGA Koyel Das, Alan Roy, Gino Tuccari, Reinhard Keller Purpose 1. Conventionally, for the formation of circular polarization, analogue
Conversion from Linear to Circular Polarization and Stokes Parameters in FPGA Koyel Das, Alan Roy, Gino Tuccari, Reinhard Keller Purpose 1. Conventionally, for the formation of circular polarization, analogue
Detecting general patterns in fish movement from the analysis of fish tagging data
 18 th World IMACS / MODSIM Congress, Cairns, Australia 13-17 July 2009 http://mssanz.org.au/modsim09 Detecting general patterns in fish movement from the analysis of fish tagging data Daphney Dagneaux,
18 th World IMACS / MODSIM Congress, Cairns, Australia 13-17 July 2009 http://mssanz.org.au/modsim09 Detecting general patterns in fish movement from the analysis of fish tagging data Daphney Dagneaux,
Linear systems UFC/DC CK0255 TIP Content. Deterministic Markov functions Stochastic Markov functions. Logistic. Evaluation.
 Markov Advanced topics in machine learning Francesco Corona Department of Computer Science Federal University of Ceará, Fortaleza Markov and ATML Markov Consider the general problem of system analysis
Markov Advanced topics in machine learning Francesco Corona Department of Computer Science Federal University of Ceará, Fortaleza Markov and ATML Markov Consider the general problem of system analysis
CLOUD NOWCASTING: MOTION ANALYSIS OF ALL-SKY IMAGES USING VELOCITY FIELDS
 CLOUD NOWCASTING: MOTION ANALYSIS OF ALL-SKY IMAGES USING VELOCITY FIELDS Yézer González 1, César López 1, Emilio Cuevas 2 1 Sieltec Canarias S.L. (Santa Cruz de Tenerife, Canary Islands, Spain. Tel. +34-922356013,
CLOUD NOWCASTING: MOTION ANALYSIS OF ALL-SKY IMAGES USING VELOCITY FIELDS Yézer González 1, César López 1, Emilio Cuevas 2 1 Sieltec Canarias S.L. (Santa Cruz de Tenerife, Canary Islands, Spain. Tel. +34-922356013,
Autonomous Navigation for Flying Robots
 Computer Vision Group Prof. Daniel Cremers Autonomous Navigation for Flying Robots Lecture 6.2: Kalman Filter Jürgen Sturm Technische Universität München Motivation Bayes filter is a useful tool for state
Computer Vision Group Prof. Daniel Cremers Autonomous Navigation for Flying Robots Lecture 6.2: Kalman Filter Jürgen Sturm Technische Universität München Motivation Bayes filter is a useful tool for state
Extensions of Bayesian Networks. Outline. Bayesian Network. Reasoning under Uncertainty. Features of Bayesian Networks.
 Extensions of Bayesian Networks Outline Ethan Howe, James Lenfestey, Tom Temple Intro to Dynamic Bayesian Nets (Tom Exact inference in DBNs with demo (Ethan Approximate inference and learning (Tom Probabilistic
Extensions of Bayesian Networks Outline Ethan Howe, James Lenfestey, Tom Temple Intro to Dynamic Bayesian Nets (Tom Exact inference in DBNs with demo (Ethan Approximate inference and learning (Tom Probabilistic
Bayesian Methods for Machine Learning
 Bayesian Methods for Machine Learning CS 584: Big Data Analytics Material adapted from Radford Neal s tutorial (http://ftp.cs.utoronto.ca/pub/radford/bayes-tut.pdf), Zoubin Ghahramni (http://hunch.net/~coms-4771/zoubin_ghahramani_bayesian_learning.pdf),
Bayesian Methods for Machine Learning CS 584: Big Data Analytics Material adapted from Radford Neal s tutorial (http://ftp.cs.utoronto.ca/pub/radford/bayes-tut.pdf), Zoubin Ghahramni (http://hunch.net/~coms-4771/zoubin_ghahramani_bayesian_learning.pdf),
A Statistical Input Pruning Method for Artificial Neural Networks Used in Environmental Modelling
 A Statistical Input Pruning Method for Artificial Neural Networks Used in Environmental Modelling G. B. Kingston, H. R. Maier and M. F. Lambert Centre for Applied Modelling in Water Engineering, School
A Statistical Input Pruning Method for Artificial Neural Networks Used in Environmental Modelling G. B. Kingston, H. R. Maier and M. F. Lambert Centre for Applied Modelling in Water Engineering, School
Data-driven methods in application to flood defence systems monitoring and analysis Pyayt, A.
 UvA-DARE (Digital Academic Repository) Data-driven methods in application to flood defence systems monitoring and analysis Pyayt, A. Link to publication Citation for published version (APA): Pyayt, A.
UvA-DARE (Digital Academic Repository) Data-driven methods in application to flood defence systems monitoring and analysis Pyayt, A. Link to publication Citation for published version (APA): Pyayt, A.
Simulation of DART Buoy Data
 Simulation of DART Buoy Data goal: develop procedure for simulating detided DART buoy data that can be used to test inversion algorithm, train users etc. simulated data has three stochastic components:
Simulation of DART Buoy Data goal: develop procedure for simulating detided DART buoy data that can be used to test inversion algorithm, train users etc. simulated data has three stochastic components:
Bayesian Networks: Construction, Inference, Learning and Causal Interpretation. Volker Tresp Summer 2016
 Bayesian Networks: Construction, Inference, Learning and Causal Interpretation Volker Tresp Summer 2016 1 Introduction So far we were mostly concerned with supervised learning: we predicted one or several
Bayesian Networks: Construction, Inference, Learning and Causal Interpretation Volker Tresp Summer 2016 1 Introduction So far we were mostly concerned with supervised learning: we predicted one or several
Information Dynamics Foundations and Applications
 Gustavo Deco Bernd Schürmann Information Dynamics Foundations and Applications With 89 Illustrations Springer PREFACE vii CHAPTER 1 Introduction 1 CHAPTER 2 Dynamical Systems: An Overview 7 2.1 Deterministic
Gustavo Deco Bernd Schürmann Information Dynamics Foundations and Applications With 89 Illustrations Springer PREFACE vii CHAPTER 1 Introduction 1 CHAPTER 2 Dynamical Systems: An Overview 7 2.1 Deterministic
Case Studies of Logical Computation on Stochastic Bit Streams
 Case Studies of Logical Computation on Stochastic Bit Streams Peng Li 1, Weikang Qian 2, David J. Lilja 1, Kia Bazargan 1, and Marc D. Riedel 1 1 Electrical and Computer Engineering, University of Minnesota,
Case Studies of Logical Computation on Stochastic Bit Streams Peng Li 1, Weikang Qian 2, David J. Lilja 1, Kia Bazargan 1, and Marc D. Riedel 1 1 Electrical and Computer Engineering, University of Minnesota,
Source Term Estimation for Hazardous Releases
 Source Term Estimation for Hazardous Releases Fukushima Workshop NCAR, 22 nd 23 rd February 2012 Dstl/DOC61790 Dr. Gareth Brown Presentation Outline Dstl s approach to Source Term Estimation Recent developments
Source Term Estimation for Hazardous Releases Fukushima Workshop NCAR, 22 nd 23 rd February 2012 Dstl/DOC61790 Dr. Gareth Brown Presentation Outline Dstl s approach to Source Term Estimation Recent developments
Convolution and Pooling as an Infinitely Strong Prior
 Convolution and Pooling as an Infinitely Strong Prior Sargur Srihari srihari@buffalo.edu This is part of lecture slides on Deep Learning: http://www.cedar.buffalo.edu/~srihari/cse676 1 Topics in Convolutional
Convolution and Pooling as an Infinitely Strong Prior Sargur Srihari srihari@buffalo.edu This is part of lecture slides on Deep Learning: http://www.cedar.buffalo.edu/~srihari/cse676 1 Topics in Convolutional
A Modular NMF Matching Algorithm for Radiation Spectra
 A Modular NMF Matching Algorithm for Radiation Spectra Melissa L. Koudelka Sensor Exploitation Applications Sandia National Laboratories mlkoude@sandia.gov Daniel J. Dorsey Systems Technologies Sandia
A Modular NMF Matching Algorithm for Radiation Spectra Melissa L. Koudelka Sensor Exploitation Applications Sandia National Laboratories mlkoude@sandia.gov Daniel J. Dorsey Systems Technologies Sandia
EAS 572 Assignment 3 (25%) 2012
 2012") EAS 572 Assignment 3 (25%) 2012 Lagrangian Simulation of Project Prairie Grass In the Project Prairie Grass tracer gas dispersion trials(barad, 1958; Haugen, 1959), sulphur dioxide was released continuously
EAS 572 Assignment 3 (25%) 2012 Lagrangian Simulation of Project Prairie Grass In the Project Prairie Grass tracer gas dispersion trials(barad, 1958; Haugen, 1959), sulphur dioxide was released continuously
X- ray surface brightness fluctuations and turbulence in galaxy clusters. Jeremy Sanders. Andy Fabian. Sanders & Fabian 2011, MNRAS, submitted
 X- ray surface brightness fluctuations and turbulence in galaxy clusters Jeremy Sanders Andy Fabian Sanders & Fabian 2011, MNRAS, submitted Simulations predict that in galaxy clusters turbulent energy
X- ray surface brightness fluctuations and turbulence in galaxy clusters Jeremy Sanders Andy Fabian Sanders & Fabian 2011, MNRAS, submitted Simulations predict that in galaxy clusters turbulent energy
Stochastic Processes. Theory for Applications. Robert G. Gallager CAMBRIDGE UNIVERSITY PRESS
 Stochastic Processes Theory for Applications Robert G. Gallager CAMBRIDGE UNIVERSITY PRESS Contents Preface page xv Swgg&sfzoMj ybr zmjfr%cforj owf fmdy xix Acknowledgements xxi 1 Introduction and review
Stochastic Processes Theory for Applications Robert G. Gallager CAMBRIDGE UNIVERSITY PRESS Contents Preface page xv Swgg&sfzoMj ybr zmjfr%cforj owf fmdy xix Acknowledgements xxi 1 Introduction and review
Online Estimation of Discrete Densities using Classifier Chains
 Online Estimation of Discrete Densities using Classifier Chains Michael Geilke 1 and Eibe Frank 2 and Stefan Kramer 1 1 Johannes Gutenberg-Universtität Mainz, Germany {geilke,kramer}@informatik.uni-mainz.de
Online Estimation of Discrete Densities using Classifier Chains Michael Geilke 1 and Eibe Frank 2 and Stefan Kramer 1 1 Johannes Gutenberg-Universtität Mainz, Germany {geilke,kramer}@informatik.uni-mainz.de
Operational Forecasting With Very-High-Resolution Models. Tom Warner
 Operational Forecasting With Very-High-Resolution Models Tom Warner Background Since 1997 NCAR Has Been Developing Operational Mesoscale Forecasting Systems for General Meteorological Support at Army Test
Operational Forecasting With Very-High-Resolution Models Tom Warner Background Since 1997 NCAR Has Been Developing Operational Mesoscale Forecasting Systems for General Meteorological Support at Army Test
Multivariate Gaussian Random Number Generator Targeting Specific Resource Utilization in an FPGA
 Multivariate Gaussian Random Number Generator Targeting Specific Resource Utilization in an FPGA Chalermpol Saiprasert, Christos-Savvas Bouganis and George A. Constantinides Department of Electrical &
Multivariate Gaussian Random Number Generator Targeting Specific Resource Utilization in an FPGA Chalermpol Saiprasert, Christos-Savvas Bouganis and George A. Constantinides Department of Electrical &
CASE STUDY. Keeping the James Webb Space Telescope on Track
 CASE STUDY Keeping the James Webb Space Telescope on Track In October 2018, NASA, the Canadian Space Agency (CSA), and the European Space Agency are set to launch the James Webb Space Telescope. Billed
CASE STUDY Keeping the James Webb Space Telescope on Track In October 2018, NASA, the Canadian Space Agency (CSA), and the European Space Agency are set to launch the James Webb Space Telescope. Billed
INTER-COMPARISON AND VALIDATION OF RANS AND LES COMPUTATIONAL APPROACHES FOR ATMOSPHERIC DISPERSION AROUND A CUBIC OBSTACLE. Resources, Kozani, Greece
 INTER-COMPARISON AND VALIDATION OF AND LES COMPUTATIONAL APPROACHES FOR ATMOSPHERIC DISPERSION AROUND A CUBIC OBSTACLE S. Andronopoulos 1, D.G.E. Grigoriadis 1, I. Mavroidis 2, R.F. Griffiths 3 and J.G.
INTER-COMPARISON AND VALIDATION OF AND LES COMPUTATIONAL APPROACHES FOR ATMOSPHERIC DISPERSION AROUND A CUBIC OBSTACLE S. Andronopoulos 1, D.G.E. Grigoriadis 1, I. Mavroidis 2, R.F. Griffiths 3 and J.G.
Artificial Intelligence
 Artificial Intelligence Roman Barták Department of Theoretical Computer Science and Mathematical Logic Summary of last lecture We know how to do probabilistic reasoning over time transition model P(X t
Artificial Intelligence Roman Barták Department of Theoretical Computer Science and Mathematical Logic Summary of last lecture We know how to do probabilistic reasoning over time transition model P(X t
Tracking Atmospheric Plumes Using Stand-off Sensor Data
 DTRA CBIS2005.ppt Sensor Data Fusion Working Group 28 October 2005 Albuquerque, NM Tracking Atmospheric Plumes Using Stand-off Sensor Data Prepared by: Robert C. Brown, David Dussault, and Richard C. Miake-Lye
DTRA CBIS2005.ppt Sensor Data Fusion Working Group 28 October 2005 Albuquerque, NM Tracking Atmospheric Plumes Using Stand-off Sensor Data Prepared by: Robert C. Brown, David Dussault, and Richard C. Miake-Lye
Linear Dynamical Systems (Kalman filter)
") Linear Dynamical Systems (Kalman filter) (a) Overview of HMMs (b) From HMMs to Linear Dynamical Systems (LDS) 1 Markov Chains with Discrete Random Variables x 1 x 2 x 3 x T Let s assume we have discrete
Linear Dynamical Systems (Kalman filter) (a) Overview of HMMs (b) From HMMs to Linear Dynamical Systems (LDS) 1 Markov Chains with Discrete Random Variables x 1 x 2 x 3 x T Let s assume we have discrete
Lecture 9. Time series prediction
 Lecture 9 Time series prediction Prediction is about function fitting To predict we need to model There are a bewildering number of models for data we look at some of the major approaches in this lecture
Lecture 9 Time series prediction Prediction is about function fitting To predict we need to model There are a bewildering number of models for data we look at some of the major approaches in this lecture
SPECIAL PROJECT PROGRESS REPORT
 SPECIAL PROJECT PROGRESS REPORT Progress Reports should be 2 to 10 pages in length, depending on importance of the project. All the following mandatory information needs to be provided. Reporting year
SPECIAL PROJECT PROGRESS REPORT Progress Reports should be 2 to 10 pages in length, depending on importance of the project. All the following mandatory information needs to be provided. Reporting year
Current best practice of uncertainty forecast for wind energy
 Current best practice of uncertainty forecast for wind energy Dr. Matthias Lange Stochastic Methods for Management and Valuation of Energy Storage in the Future German Energy System 17 March 2016 Overview
Current best practice of uncertainty forecast for wind energy Dr. Matthias Lange Stochastic Methods for Management and Valuation of Energy Storage in the Future German Energy System 17 March 2016 Overview
PHYS 352. Shot Noise, 1/f Noise. current (which is rate of charge)
") PHYS 352 Shot Noise, 1/f Noise Shot Noise current (which is rate of charge) current does not flow completely smoothly when charges arrive as quanta e.g. charge collection in a photodiode is a random, independent
PHYS 352 Shot Noise, 1/f Noise Shot Noise current (which is rate of charge) current does not flow completely smoothly when charges arrive as quanta e.g. charge collection in a photodiode is a random, independent
ON SCALABLE CODING OF HIDDEN MARKOV SOURCES. Mehdi Salehifar, Tejaswi Nanjundaswamy, and Kenneth Rose
 ON SCALABLE CODING OF HIDDEN MARKOV SOURCES Mehdi Salehifar, Tejaswi Nanjundaswamy, and Kenneth Rose Department of Electrical and Computer Engineering University of California, Santa Barbara, CA, 93106
ON SCALABLE CODING OF HIDDEN MARKOV SOURCES Mehdi Salehifar, Tejaswi Nanjundaswamy, and Kenneth Rose Department of Electrical and Computer Engineering University of California, Santa Barbara, CA, 93106
Statistical Filters for Crowd Image Analysis
 Statistical Filters for Crowd Image Analysis Ákos Utasi, Ákos Kiss and Tamás Szirányi Distributed Events Analysis Research Group, Computer and Automation Research Institute H-1111 Budapest, Kende utca
Statistical Filters for Crowd Image Analysis Ákos Utasi, Ákos Kiss and Tamás Szirányi Distributed Events Analysis Research Group, Computer and Automation Research Institute H-1111 Budapest, Kende utca
On Optimal Coding of Hidden Markov Sources
 2014 Data Compression Conference On Optimal Coding of Hidden Markov Sources Mehdi Salehifar, Emrah Akyol, Kumar Viswanatha, and Kenneth Rose Department of Electrical and Computer Engineering University
2014 Data Compression Conference On Optimal Coding of Hidden Markov Sources Mehdi Salehifar, Emrah Akyol, Kumar Viswanatha, and Kenneth Rose Department of Electrical and Computer Engineering University
Modelling residual wind farm variability using HMMs
 8 th World IMACS/MODSIM Congress, Cairns, Australia 3-7 July 2009 http://mssanz.org.au/modsim09 Modelling residual wind farm variability using HMMs Ward, K., Korolkiewicz, M. and Boland, J. School of Mathematics
8 th World IMACS/MODSIM Congress, Cairns, Australia 3-7 July 2009 http://mssanz.org.au/modsim09 Modelling residual wind farm variability using HMMs Ward, K., Korolkiewicz, M. and Boland, J. School of Mathematics
Dynamic Data Modeling, Recognition, and Synthesis. Rui Zhao Thesis Defense Advisor: Professor Qiang Ji
 Dynamic Data Modeling, Recognition, and Synthesis Rui Zhao Thesis Defense Advisor: Professor Qiang Ji Contents Introduction Related Work Dynamic Data Modeling & Analysis Temporal localization Insufficient
Dynamic Data Modeling, Recognition, and Synthesis Rui Zhao Thesis Defense Advisor: Professor Qiang Ji Contents Introduction Related Work Dynamic Data Modeling & Analysis Temporal localization Insufficient
The Spatial Variation of the Maximum Possible Pollutant Concentration from Steady Sources
 International Environmental Modelling and Software Society (iemss) 2010 International Congress on Environmental Modelling and Software Modelling for Environment s Sake, Fifth Biennial Meeting, Ottawa,
International Environmental Modelling and Software Society (iemss) 2010 International Congress on Environmental Modelling and Software Modelling for Environment s Sake, Fifth Biennial Meeting, Ottawa,
IV. Covariance Analysis
 IV. Covariance Analysis Autocovariance Remember that when a stochastic process has time values that are interdependent, then we can characterize that interdependency by computing the autocovariance function.
IV. Covariance Analysis Autocovariance Remember that when a stochastic process has time values that are interdependent, then we can characterize that interdependency by computing the autocovariance function.
Towards inference for skewed alpha stable Levy processes
 Towards inference for skewed alpha stable Levy processes Simon Godsill and Tatjana Lemke Signal Processing and Communications Lab. University of Cambridge www-sigproc.eng.cam.ac.uk/~sjg Overview Motivation
Towards inference for skewed alpha stable Levy processes Simon Godsill and Tatjana Lemke Signal Processing and Communications Lab. University of Cambridge www-sigproc.eng.cam.ac.uk/~sjg Overview Motivation
Comparison of Modern Stochastic Optimization Algorithms
 Comparison of Modern Stochastic Optimization Algorithms George Papamakarios December 214 Abstract Gradient-based optimization methods are popular in machine learning applications. In large-scale problems,
Comparison of Modern Stochastic Optimization Algorithms George Papamakarios December 214 Abstract Gradient-based optimization methods are popular in machine learning applications. In large-scale problems,
Introduction. Chapter 1
 Chapter 1 Introduction In this book we will be concerned with supervised learning, which is the problem of learning input-output mappings from empirical data (the training dataset). Depending on the characteristics
Chapter 1 Introduction In this book we will be concerned with supervised learning, which is the problem of learning input-output mappings from empirical data (the training dataset). Depending on the characteristics
FLACS CFD Model Evaluation with Kit Fox, MUST, Prairie Grass, and EMU L-Shaped Building Data
 FLACS CFD Model Evaluation with Kit Fox, MUST, Prairie Grass, and EMU L-Shaped Building Data Steven Hanna (Harvard Univ., Boston, MA) Olav Hansen (Gexcon, Bergen, Norway) Seshu Dharmavaram (Dupont Corp.,
FLACS CFD Model Evaluation with Kit Fox, MUST, Prairie Grass, and EMU L-Shaped Building Data Steven Hanna (Harvard Univ., Boston, MA) Olav Hansen (Gexcon, Bergen, Norway) Seshu Dharmavaram (Dupont Corp.,
EAS rd Scored Assignment (20%) Due: 7 Apr. 2016
 Due: 7 Apr. 2016") EAS 471 3 rd Scored Assignment (0%) Due: 7 Apr. 016 Option A: Lagrangian Simulation of Project Prairie Grass In the Project Prairie Grass tracer gas dispersion trials (Barad, 1958; Haugen, 1959), sulphur
EAS 471 3 rd Scored Assignment (0%) Due: 7 Apr. 016 Option A: Lagrangian Simulation of Project Prairie Grass In the Project Prairie Grass tracer gas dispersion trials (Barad, 1958; Haugen, 1959), sulphur
Fully Bayesian Deep Gaussian Processes for Uncertainty Quantification
 Fully Bayesian Deep Gaussian Processes for Uncertainty Quantification N. Zabaras 1 S. Atkinson 1 Center for Informatics and Computational Science Department of Aerospace and Mechanical Engineering University
Fully Bayesian Deep Gaussian Processes for Uncertainty Quantification N. Zabaras 1 S. Atkinson 1 Center for Informatics and Computational Science Department of Aerospace and Mechanical Engineering University
BLIND SEPARATION OF TEMPORALLY CORRELATED SOURCES USING A QUASI MAXIMUM LIKELIHOOD APPROACH
 BLID SEPARATIO OF TEMPORALLY CORRELATED SOURCES USIG A QUASI MAXIMUM LIKELIHOOD APPROACH Shahram HOSSEII, Christian JUTTE Laboratoire des Images et des Signaux (LIS, Avenue Félix Viallet Grenoble, France.
BLID SEPARATIO OF TEMPORALLY CORRELATED SOURCES USIG A QUASI MAXIMUM LIKELIHOOD APPROACH Shahram HOSSEII, Christian JUTTE Laboratoire des Images et des Signaux (LIS, Avenue Félix Viallet Grenoble, France.
FILTERING IN THE FREQUENCY DOMAIN
 1 FILTERING IN THE FREQUENCY DOMAIN Lecture 4 Spatial Vs Frequency domain 2 Spatial Domain (I) Normal image space Changes in pixel positions correspond to changes in the scene Distances in I correspond
1 FILTERING IN THE FREQUENCY DOMAIN Lecture 4 Spatial Vs Frequency domain 2 Spatial Domain (I) Normal image space Changes in pixel positions correspond to changes in the scene Distances in I correspond
Lagrangian Data Assimilation and Manifold Detection for a Point-Vortex Model. David Darmon, AMSC Kayo Ide, AOSC, IPST, CSCAMM, ESSIC
 Lagrangian Data Assimilation and Manifold Detection for a Point-Vortex Model David Darmon, AMSC Kayo Ide, AOSC, IPST, CSCAMM, ESSIC Background Data Assimilation Iterative process Forecast Analysis Background
Lagrangian Data Assimilation and Manifold Detection for a Point-Vortex Model David Darmon, AMSC Kayo Ide, AOSC, IPST, CSCAMM, ESSIC Background Data Assimilation Iterative process Forecast Analysis Background
IMPLEMENTATION OF SIGNAL POWER ESTIMATION METHODS
 IMPLEMENTATION OF SIGNAL POWER ESTIMATION METHODS Sei-Yeu Cheng and Joseph B. Evans Telecommunications & Information Sciences Laboratory Department of Electrical Engineering & Computer Science University
IMPLEMENTATION OF SIGNAL POWER ESTIMATION METHODS Sei-Yeu Cheng and Joseph B. Evans Telecommunications & Information Sciences Laboratory Department of Electrical Engineering & Computer Science University
Footprints: outline Üllar Rannik University of Helsinki
 Footprints: outline Üllar Rannik University of Helsinki -Concept of footprint and definitions -Analytical footprint models -Model by Korman and Meixner -Footprints for fluxes vs. concentrations -Footprints
Footprints: outline Üllar Rannik University of Helsinki -Concept of footprint and definitions -Analytical footprint models -Model by Korman and Meixner -Footprints for fluxes vs. concentrations -Footprints
350 Int. J. Environment and Pollution Vol. 5, Nos. 3 6, 1995
 350 Int. J. Environment and Pollution Vol. 5, Nos. 3 6, 1995 A puff-particle dispersion model P. de Haan and M. W. Rotach Swiss Federal Institute of Technology, GGIETH, Winterthurerstrasse 190, 8057 Zürich,
350 Int. J. Environment and Pollution Vol. 5, Nos. 3 6, 1995 A puff-particle dispersion model P. de Haan and M. W. Rotach Swiss Federal Institute of Technology, GGIETH, Winterthurerstrasse 190, 8057 Zürich,
Naka-Gun, Ibaraki, , Japan
 Examination of Atmospheric Dispersion Model s Performance - Comparison with the Monitoring Data under the Normal Operation of the Tokai Reprocessing Plant - M. Takeyasu 1, M. Nakano 1, N. Miyagawa 1, M.
Examination of Atmospheric Dispersion Model s Performance - Comparison with the Monitoring Data under the Normal Operation of the Tokai Reprocessing Plant - M. Takeyasu 1, M. Nakano 1, N. Miyagawa 1, M.
Learning From Data Lecture 15 Reflecting on Our Path - Epilogue to Part I
 Learning From Data Lecture 15 Reflecting on Our Path - Epilogue to Part I What We Did The Machine Learning Zoo Moving Forward M Magdon-Ismail CSCI 4100/6100 recap: Three Learning Principles Scientist 2
Learning From Data Lecture 15 Reflecting on Our Path - Epilogue to Part I What We Did The Machine Learning Zoo Moving Forward M Magdon-Ismail CSCI 4100/6100 recap: Three Learning Principles Scientist 2
channel system which covers both sides of the laser line. Coverage on both sides of the spectrum allows for
 Large-Area Avalanche Photodiode Detector Array Upgrade for a Ruby-Laser Thomson Scattering System T.M. Biewer, D.J. Den Hartog, D.J. Holly Department of Physics, University of Wisconsin-Madison M.R. Stoneking
Large-Area Avalanche Photodiode Detector Array Upgrade for a Ruby-Laser Thomson Scattering System T.M. Biewer, D.J. Den Hartog, D.J. Holly Department of Physics, University of Wisconsin-Madison M.R. Stoneking
Utility of Correlation Functions
 Utility of Correlation Functions 1. As a means for estimating power spectra (e.g. a correlator + WK theorem). 2. For establishing characteristic time scales in time series (width of the ACF or ACV). 3.
Utility of Correlation Functions 1. As a means for estimating power spectra (e.g. a correlator + WK theorem). 2. For establishing characteristic time scales in time series (width of the ACF or ACV). 3.
Heeyoul (Henry) Choi. Dept. of Computer Science Texas A&M University
 Choi. Dept. of Computer Science Texas A&M University") Heeyoul (Henry) Choi Dept. of Computer Science Texas A&M University hchoi@cs.tamu.edu Introduction Speaker Adaptation Eigenvoice Comparison with others MAP, MLLR, EMAP, RMP, CAT, RSW Experiments Future
Heeyoul (Henry) Choi Dept. of Computer Science Texas A&M University hchoi@cs.tamu.edu Introduction Speaker Adaptation Eigenvoice Comparison with others MAP, MLLR, EMAP, RMP, CAT, RSW Experiments Future
A SIMPLE CLOUD SIMULATOR FOR INVESTIGATING THE CORRELATION SCALING COEFFICIENT USED IN THE WAVELET VARIABILITY MODEL (WVM)
") A SIMPLE CLOUD SIMULATOR FOR INVESTIGATING THE CORRELATION SCALING COEFFICIENT USED IN THE WAVELET VARIABILITY MODEL (WVM) Matthew Lave Jan Kleissl University of California, San Diego 9 Gilman Dr. #11
A SIMPLE CLOUD SIMULATOR FOR INVESTIGATING THE CORRELATION SCALING COEFFICIENT USED IN THE WAVELET VARIABILITY MODEL (WVM) Matthew Lave Jan Kleissl University of California, San Diego 9 Gilman Dr. #11
Spatial Statistics with Image Analysis. Outline. A Statistical Approach. Johan Lindström 1. Lund October 6, 2016
 Spatial Statistics Spatial Examples More Spatial Statistics with Image Analysis Johan Lindström 1 1 Mathematical Statistics Centre for Mathematical Sciences Lund University Lund October 6, 2016 Johan Lindström
Spatial Statistics Spatial Examples More Spatial Statistics with Image Analysis Johan Lindström 1 1 Mathematical Statistics Centre for Mathematical Sciences Lund University Lund October 6, 2016 Johan Lindström
Let us consider a typical Michelson interferometer, where a broadband source is used for illumination (Fig. 1a).
.") 7.1. Low-Coherence Interferometry (LCI) Let us consider a typical Michelson interferometer, where a broadband source is used for illumination (Fig. 1a). The light is split by the beam splitter (BS) and
7.1. Low-Coherence Interferometry (LCI) Let us consider a typical Michelson interferometer, where a broadband source is used for illumination (Fig. 1a). The light is split by the beam splitter (BS) and
Recurrent Autoregressive Networks for Online Multi-Object Tracking. Presented By: Ishan Gupta
 Recurrent Autoregressive Networks for Online Multi-Object Tracking Presented By: Ishan Gupta Outline Multi Object Tracking Recurrent Autoregressive Networks (RANs) RANs for Online Tracking Other State
Recurrent Autoregressive Networks for Online Multi-Object Tracking Presented By: Ishan Gupta Outline Multi Object Tracking Recurrent Autoregressive Networks (RANs) RANs for Online Tracking Other State
How to do backpropagation in a brain
 How to do backpropagation in a brain Geoffrey Hinton Canadian Institute for Advanced Research & University of Toronto & Google Inc. Prelude I will start with three slides explaining a popular type of deep
How to do backpropagation in a brain Geoffrey Hinton Canadian Institute for Advanced Research & University of Toronto & Google Inc. Prelude I will start with three slides explaining a popular type of deep
Exercises Tutorial at ICASSP 2016 Learning Nonlinear Dynamical Models Using Particle Filters
 Exercises Tutorial at ICASSP 216 Learning Nonlinear Dynamical Models Using Particle Filters Andreas Svensson, Johan Dahlin and Thomas B. Schön March 18, 216 Good luck! 1 [Bootstrap particle filter for
Exercises Tutorial at ICASSP 216 Learning Nonlinear Dynamical Models Using Particle Filters Andreas Svensson, Johan Dahlin and Thomas B. Schön March 18, 216 Good luck! 1 [Bootstrap particle filter for
Wavefront reconstruction for adaptive optics. Marcos van Dam and Richard Clare W.M. Keck Observatory
 Wavefront reconstruction for adaptive optics Marcos van Dam and Richard Clare W.M. Keck Observatory Friendly people We borrowed slides from the following people: Lisa Poyneer Luc Gilles Curt Vogel Corinne
Wavefront reconstruction for adaptive optics Marcos van Dam and Richard Clare W.M. Keck Observatory Friendly people We borrowed slides from the following people: Lisa Poyneer Luc Gilles Curt Vogel Corinne
Machine vision. Summary # 4. The mask for Laplacian is given
 1 Machine vision Summary # 4 The mask for Laplacian is given L = 0 1 0 1 4 1 (6) 0 1 0 Another Laplacian mask that gives more importance to the center element is L = 1 1 1 1 8 1 (7) 1 1 1 Note that the
1 Machine vision Summary # 4 The mask for Laplacian is given L = 0 1 0 1 4 1 (6) 0 1 0 Another Laplacian mask that gives more importance to the center element is L = 1 1 1 1 8 1 (7) 1 1 1 Note that the
Modelling of Flow and Tracer Dispersion over Complex Urban Terrain in the Atmospheric Boundary Layer
 Modelling of Flow and Tracer Dispersion over Complex Urban Terrain in the Atmospheric Boundary Layer A. T. SKVORTSOV, P. D. DAWSON, M. D. ROBERTS and R. M. GAILIS Defence Science and Technology Organisation
Modelling of Flow and Tracer Dispersion over Complex Urban Terrain in the Atmospheric Boundary Layer A. T. SKVORTSOV, P. D. DAWSON, M. D. ROBERTS and R. M. GAILIS Defence Science and Technology Organisation
Template-Based Representations. Sargur Srihari
 Template-Based Representations Sargur srihari@cedar.buffalo.edu 1 Topics Variable-based vs Template-based Temporal Models Basic Assumptions Dynamic Bayesian Networks Hidden Markov Models Linear Dynamical
Template-Based Representations Sargur srihari@cedar.buffalo.edu 1 Topics Variable-based vs Template-based Temporal Models Basic Assumptions Dynamic Bayesian Networks Hidden Markov Models Linear Dynamical
Basics on 2-D 2 D Random Signal
 Basics on -D D Random Signal Spring 06 Instructor: K. J. Ray Liu ECE Department, Univ. of Maryland, College Park Overview Last Time: Fourier Analysis for -D signals Image enhancement via spatial filtering
Basics on -D D Random Signal Spring 06 Instructor: K. J. Ray Liu ECE Department, Univ. of Maryland, College Park Overview Last Time: Fourier Analysis for -D signals Image enhancement via spatial filtering
Kepler photometric accuracy with degraded attitude control
 Kepler photometric accuracy with degraded attitude control Hans Kjeldsen, Torben Arentoft and Jørgen Christensen-Dalsgaard KASOC, Stellar Astrophysics Centre, Aarhus University, Denmark - 25 July 2013
Kepler photometric accuracy with degraded attitude control Hans Kjeldsen, Torben Arentoft and Jørgen Christensen-Dalsgaard KASOC, Stellar Astrophysics Centre, Aarhus University, Denmark - 25 July 2013
What does such a voltage signal look like? Signals are commonly observed and graphed as functions of time:
 Objectives Upon completion of this module, you should be able to: understand uniform quantizers, including dynamic range and sources of error, represent numbers in two s complement binary form, assign
Objectives Upon completion of this module, you should be able to: understand uniform quantizers, including dynamic range and sources of error, represent numbers in two s complement binary form, assign
ACCUMULATED JITTER MEASUREMENT OF STANDARD CLOCK OSCILLATORS
 METROLOGY AND MEASUREMENT SYSTEMS Index 330930, ISSN 0860-89 www.metrology.pg.gda.pl ACCUMULATED JITTER MEASUREMENT OF STANDARD CLOCK OSCILLATORS Marek Zieliński, Marcin Kowalski, Robert Frankowski, Dariusz
METROLOGY AND MEASUREMENT SYSTEMS Index 330930, ISSN 0860-89 www.metrology.pg.gda.pl ACCUMULATED JITTER MEASUREMENT OF STANDARD CLOCK OSCILLATORS Marek Zieliński, Marcin Kowalski, Robert Frankowski, Dariusz
Kalman filtering and friends: Inference in time series models. Herke van Hoof slides mostly by Michael Rubinstein
 Kalman filtering and friends: Inference in time series models Herke van Hoof slides mostly by Michael Rubinstein Problem overview Goal Estimate most probable state at time k using measurement up to time
Kalman filtering and friends: Inference in time series models Herke van Hoof slides mostly by Michael Rubinstein Problem overview Goal Estimate most probable state at time k using measurement up to time
Urban Dispersion and Data Handling in JEM
 Urban Dispersion and Data Handling in JEM Ian Griffiths, David Brook & Paul Cullen (Dstl) Tim Dudman & Russell Mills (RiskAware Ltd) Rick Fry (DTRA) Those parts produced by Dstl authors are Crown Copyright
Urban Dispersion and Data Handling in JEM Ian Griffiths, David Brook & Paul Cullen (Dstl) Tim Dudman & Russell Mills (RiskAware Ltd) Rick Fry (DTRA) Those parts produced by Dstl authors are Crown Copyright
The Quantum Landscape
 The Quantum Landscape Computational drug discovery employing machine learning and quantum computing Contact us! lucas@proteinqure.com Or visit our blog to learn more @ www.proteinqure.com 2 Applications
The Quantum Landscape Computational drug discovery employing machine learning and quantum computing Contact us! lucas@proteinqure.com Or visit our blog to learn more @ www.proteinqure.com 2 Applications
Signal Modeling, Statistical Inference and Data Mining in Astrophysics
 ASTRONOMY 6523 Spring 2013 Signal Modeling, Statistical Inference and Data Mining in Astrophysics Course Approach The philosophy of the course reflects that of the instructor, who takes a dualistic view
ASTRONOMY 6523 Spring 2013 Signal Modeling, Statistical Inference and Data Mining in Astrophysics Course Approach The philosophy of the course reflects that of the instructor, who takes a dualistic view
J7.3 INTERACTIVE MODELING AND SENSING IN URBAN SETTINGS. J. Cogan *, R. Dumais, Y. Wang, and M. Torres
 J7.3 INTERACTIVE MODELING AND SENSING IN URBAN SETTINGS J. Cogan *, R. Dumais, Y. Wang, and M. Torres Computational and Information Sciences Directorate Army Research Laboratory White Sands Missile Range,
J7.3 INTERACTIVE MODELING AND SENSING IN URBAN SETTINGS J. Cogan *, R. Dumais, Y. Wang, and M. Torres Computational and Information Sciences Directorate Army Research Laboratory White Sands Missile Range,
Missing Data and Dynamical Systems
 U NIVERSITY OF ILLINOIS AT URBANA-CHAMPAIGN CS598PS Machine Learning for Signal Processing Missing Data and Dynamical Systems 12 October 2017 Today s lecture Dealing with missing data Tracking and linear
U NIVERSITY OF ILLINOIS AT URBANA-CHAMPAIGN CS598PS Machine Learning for Signal Processing Missing Data and Dynamical Systems 12 October 2017 Today s lecture Dealing with missing data Tracking and linear
Deep Learning. Convolutional Neural Network (CNNs) Ali Ghodsi. October 30, Slides are partially based on Book in preparation, Deep Learning
 Ali Ghodsi. October 30, Slides are partially based on Book in preparation, Deep Learning") Convolutional Neural Network (CNNs) University of Waterloo October 30, 2015 Slides are partially based on Book in preparation, by Bengio, Goodfellow, and Aaron Courville, 2015 Convolutional Networks Convolutional
Convolutional Neural Network (CNNs) University of Waterloo October 30, 2015 Slides are partially based on Book in preparation, by Bengio, Goodfellow, and Aaron Courville, 2015 Convolutional Networks Convolutional
Laboratory Project 1: Introduction to Random Processes
 Laboratory Project 1: Introduction to Random Processes Random Processes With Applications (MVE 135) Mats Viberg Department of Signals and Systems Chalmers University of Technology 412 96 Gteborg, Sweden
Laboratory Project 1: Introduction to Random Processes Random Processes With Applications (MVE 135) Mats Viberg Department of Signals and Systems Chalmers University of Technology 412 96 Gteborg, Sweden
Demographic Inference with Coalescent Hidden Markov Model
 Demographic Inference with Coalescent Hidden Markov Model Jade Y. Cheng Thomas Mailund Bioinformatics Research Centre Aarhus University Denmark The Thirteenth Asia Pacific Bioinformatics Conference HsinChu,
Demographic Inference with Coalescent Hidden Markov Model Jade Y. Cheng Thomas Mailund Bioinformatics Research Centre Aarhus University Denmark The Thirteenth Asia Pacific Bioinformatics Conference HsinChu,
Detection of X-Rays. Solid state detectors Proportional counters Microcalorimeters Detector characteristics
 Detection of X-Rays Solid state detectors Proportional counters Microcalorimeters Detector characteristics Solid State X-ray Detectors X-ray interacts in material to produce photoelectrons which are collected
Detection of X-Rays Solid state detectors Proportional counters Microcalorimeters Detector characteristics Solid State X-ray Detectors X-ray interacts in material to produce photoelectrons which are collected
Bayesian Calibration of Simulators with Structured Discretization Uncertainty
 Bayesian Calibration of Simulators with Structured Discretization Uncertainty Oksana A. Chkrebtii Department of Statistics, The Ohio State University Joint work with Matthew T. Pratola (Statistics, The
Bayesian Calibration of Simulators with Structured Discretization Uncertainty Oksana A. Chkrebtii Department of Statistics, The Ohio State University Joint work with Matthew T. Pratola (Statistics, The
Data Assimilation: Finding the Initial Conditions in Large Dynamical Systems. Eric Kostelich Data Mining Seminar, Feb. 6, 2006
 Data Assimilation: Finding the Initial Conditions in Large Dynamical Systems Eric Kostelich Data Mining Seminar, Feb. 6, 2006 kostelich@asu.edu Co-Workers Istvan Szunyogh, Gyorgyi Gyarmati, Ed Ott, Brian
Data Assimilation: Finding the Initial Conditions in Large Dynamical Systems Eric Kostelich Data Mining Seminar, Feb. 6, 2006 kostelich@asu.edu Co-Workers Istvan Szunyogh, Gyorgyi Gyarmati, Ed Ott, Brian
Kyle Reing University of Southern California April 18, 2018
 Renormalization Group and Information Theory Kyle Reing University of Southern California April 18, 2018 Overview Renormalization Group Overview Information Theoretic Preliminaries Real Space Mutual Information
Renormalization Group and Information Theory Kyle Reing University of Southern California April 18, 2018 Overview Renormalization Group Overview Information Theoretic Preliminaries Real Space Mutual Information
OFFLINE APPROACH FOR HIGHER ORDER CONCENTRATION MOMENTS Andrea Bisignano 1, Luca Mortarini 2, Enrico Ferrero 1, Stefano Alessandrini 3
 OFFLINE APPROAC FOR IGER ORDER CONCENTRATION MOMENTS Andrea Bisignano 1, Luca Mortarini, Enrico Ferrero 1, Stefano Alessandrini 3 1 Università del Piemonte Orientale, Dipartimento di Scienze e Innovazione
OFFLINE APPROAC FOR IGER ORDER CONCENTRATION MOMENTS Andrea Bisignano 1, Luca Mortarini, Enrico Ferrero 1, Stefano Alessandrini 3 1 Università del Piemonte Orientale, Dipartimento di Scienze e Innovazione
Machine vision, spring 2018 Summary 4
 Machine vision Summary # 4 The mask for Laplacian is given L = 4 (6) Another Laplacian mask that gives more importance to the center element is given by L = 8 (7) Note that the sum of the elements in the
Machine vision Summary # 4 The mask for Laplacian is given L = 4 (6) Another Laplacian mask that gives more importance to the center element is given by L = 8 (7) Note that the sum of the elements in the
FIRE SAFETY DESIGN USING LARGE EDDY SIMULATION MODELS: EME BUILDING OF BUET: A CASE STUDY
 Proceedings of the International Conference on Mechanical Engineering 2011 (ICME2011) 18-20 December 2011, Dhaka, Bangladesh ICME11- FIRE SAFETY DESIGN USING LARGE EDDY SIMULATION MODELS: EME BUILDING
Proceedings of the International Conference on Mechanical Engineering 2011 (ICME2011) 18-20 December 2011, Dhaka, Bangladesh ICME11- FIRE SAFETY DESIGN USING LARGE EDDY SIMULATION MODELS: EME BUILDING
CS Homework 3. October 15, 2009
 CS 294 - Homework 3 October 15, 2009 If you have questions, contact Alexandre Bouchard (bouchard@cs.berkeley.edu) for part 1 and Alex Simma (asimma@eecs.berkeley.edu) for part 2. Also check the class website
CS 294 - Homework 3 October 15, 2009 If you have questions, contact Alexandre Bouchard (bouchard@cs.berkeley.edu) for part 1 and Alex Simma (asimma@eecs.berkeley.edu) for part 2. Also check the class website