Towards inference for skewed alpha stable Levy processes
|
|
|
- Prosper Banks
- 5 years ago
- Views:
Transcription





1 Towards inference for skewed alpha stable Levy processes Simon Godsill and Tatjana Lemke Signal Processing and Communications Lab. University of Cambridge www-sigproc.eng.cam.ac.uk/~sjg




2 Overview Motivation Continuous-time models Inference for models with jumps Inference for alpha-stable Levy processes Conclusions

 models: Measurements (range,")
3 Motivation Traditional tracking applications run in discrete time discrete time state space models: Dynamic models of behaviour: Hidden state (position/velocity ) Sensor (observation) models: Measurements (range, bearing, )


4 State Space Model: Optimal Filtering (sequential inference):
5 It is often more natural to model in continuous time: Observations can arrive at arbitrary timings, and out of sequence Object manoeuvres are carried out in continuous time without reference to observation times Real objects undergo rapid and random changes of regime, or `jumps, occurring at unknown times on the continuous-time scale: Variable rate - C =60, C =2, T =100, N Particles= To appear
6 Can approximate this type of behaviour with jump Markov (or semi-markov) discrete time systems, allowing a finite set of discrete time switching models (HMMs, etc.) However, seems more natural to model directly in continuous time, without limiting regimes to a finite set (although can extend models to allow in addition regime switching between discrete states) Bayesian Monte Carlo computational tools are well suited to inference in these continuous time models

7 Continuous time models
} is comprised of (scaled) Brownian motion {B(t)} plus a pure Gaussian jump process{z(t)}: 2 1.5 1 0.5 0-0.5-1 -1.5-2 -2.")
8 100.3 Variable rate - C =60, C =2, T =100, N Particles=400 Example: stochastic trend model with Gaussian jumps Now assume that {W(t)} is comprised of (scaled) Brownian motion {B(t)} plus a pure Gaussian jump process{z(t)}: See Christensen, Murphy and Godsill, 2012
9

10 Observation of the jump process Now assume discrete-time observations of the continuous-time process, e.g. Filtering/ smoothing and parameter estimation can now be carried out using Kalman-filter conditional likelihoods:
 and Bunch")
11 Fixed Interval Filtering and Smoothing Particle filter-smoother, See Godsill, Doucet, West (2004) and Bunch and Godsill (2012)

12 Tracking examples
13 Joint work with Tatjana Lemke, see Lemke and Godsill Proc. ICASSP 2011, ICASSP stable Levy processes Previously modelled jumps as a finite activity process Perhaps more realistic to model the jumps as an infinite collection of large/ small/tiny jumps occurring in each finite time interval -stable Levy processes provide a natural way to achieve this justified in many Communications, Signal Processing and Finance applications
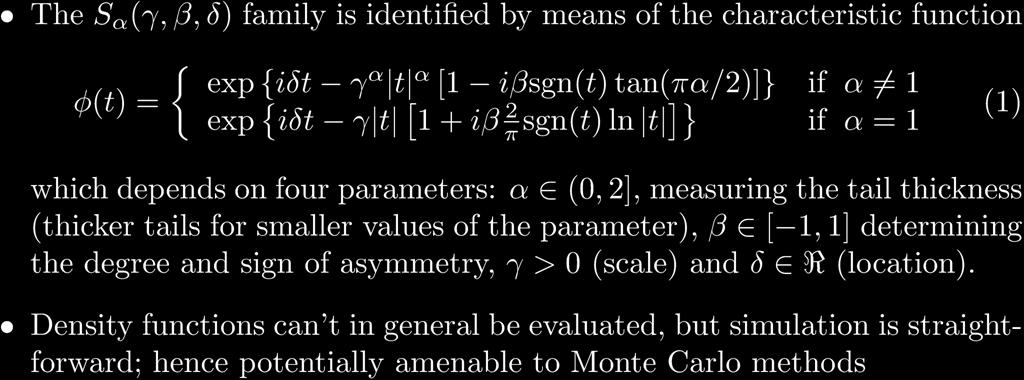
14 Stable distributions

15
16






17 Approaches to inference can be made by scale mixtures of normals for symmetric case, and Euler discretisation Godsill and Kuruoglu 1998, Godsill and Yang 2006, Tsionas See also Buckle (1995) Our current work focuses on a powerful series expansion for the general asymmetric case:
18 Arrival times of a unit rate Poisson process iid random variables satisfying some simple moment conditions, e.g. A Gaussian would do. [Here stated in its simplest form for a random variable with <1. A similar form applies for the stochastic integral.] [Samorodnitsky and Taqqu 1994]

19 now has a `physical interpretation as the scale of the ith jump. [Samorodnitsky and Taqqu 1994] [See also Barndorff-Nielsen and Shephard (2001,2001)]


 can")


20 Now, taking W i to be iid N(¹ W,¾ W2 ), we have a Gaussian structure, conditional upon the terms i This can be readily handled using Bayesian Monte Carlo inference. As a significant bonus, (¹ W,¾ W2 ) can be analytically marginalised, leaving only to be sampled The trade-off is that we must also simulate an infinite series of i terms in practice we do this by truncating the series and approximating the residual.

21
22 Truncation of the Series In practice cannot compute the entire infinite series: Instead, truncate at a limit, i <c, and approximate the residual with a Gaussian matched to first two moments of the residual (analytically computed).

23

24
, one for each data")
25 Inference Schemes Consider e.g. A MCMC inference algorithm for the parameters and the latent variables. Parameters are, ¾ W, ¹ W, {m,v} The challenging part is the latent variables (m,v), one for each data point.
26 Latent Variables (m,v) Can sample directly from the prior p(m,v) and use rejection sampling (unbounded envelope, but can fix (condition on) the residual terms and make it bounded). Not good enough for large values of X (slow in the tails!); instead, look at p(m,v):
27 ca Observe that for large m, V is approximately m 2 This means that we can force prior samples of m into the tails of the distribution ( -stable and hence pareto) and perform rejection sampling with likelihood constrained to the line V=m 2 This is a rare-event tail approximation for large X values, but the approximation appears very good and speeds up sampling dramatically. Can tune accuracy vs. speed by selecting the switchover point between optimal (slow) and tail approximation (fast).





28 State-space models and continuous time Incorporation into discrete-time statespace models is fairly straightforward likelihood computation can then be done by a mean- and scale-shifted Kalman filter Continuous time is also a fairly straightforward extension also need to sample the {V i }
29
30
31



, Carter and Kohn (1994")

32 Conclusion A general framework for inference of -stable distribution parameters, linear state-space models and continuous-time Levy processes Straightforward computations using conditionally Gaussian models (Shephard (1993 Biometrika), Carter and Kohn (1994 Biometrika)), and particle filters Currently exploring Particle MCMC methods for parameter estimation
33 References S. J. Godsill, J. Vermaak, W. Ng and J.F. Li. Variable rate particle filters for tracking applications in Proceedings of the IEEE, Special Issue on Large Scale Dynamical Systems, S. J. Godsill and J. Vermaak. Variable rate particle filters for tracking applications. In Proc. IEEE Stat. Sig. Proc., Bordeaux, S. J. Godsill and J. Vermaak, Models and algorithms for tracking using trans-dimensional sequential Monte Carlo. In Proc. IEEE ICASSP 2004 Barndorff-Nielsen, Ole E. and Neil Shephard (2001) "Normal modified stable processes", Theory of Probability and Mathematical Statistics, 2001, Barndorff-Nielsen, Ole E. and Neil Shephard (2001) "Non-Gaussian Ornstein-Uhlenbeck-based models and some of their uses in financial economics", (with discussion) Journal of the Royal Statistical Society, Series B, 63, Buckle, D. J. (1995), Bayesian inference for stable distributions, JASA, 90: S. J. Godsill. Inference in symmetric alpha-stable noise using MCMC and the slice sampler. In Proc. IEEE International Conference on Acoustics, Speech and Signal Processing, volume VI, pages , ISBN S. J. Godsill. MCMC and EM-based methods for inference in heavy-tailed processes with alpha-stable innovations. In Proc. IEEE Signal processing workshop on higher-order statistics, June Caesarea, Israel.[ bib.ps ] S. J. Godsill and E. E. Kuruoglu. Bayesian inference for time series with heavy-tailed symmetric α-stable noise processes. In Proc. Applications of heavy tailed distributions in economics, engineering and statistics, June Washington DC, USA.[ bib.ps ] S.J. Godsill and L. Yang. Bayesian inference for continuous-time AR models driven by non-gaussian lévy processes. In Proc. IEEE International Conference on Acoustics, Speech and Signal Processing, Toulouse, France, May Tatjana Lemke, Simon J. Godsill: Enhanced Poisson sum representation for alpha-stable processes. ICASSP 2011: Tatjana Lemke, Simon J. Godsill: LINEAR GAUSSIAN COMPUTATIONS FOR NEAR-EXACT BAYESIAN MONTE CARLO INFERENCE IN SKEWED ALPHA-STABLE TIME SERIES MODELS, ICASSP 20112
PATTERN RECOGNITION AND MACHINE LEARNING CHAPTER 13: SEQUENTIAL DATA
 PATTERN RECOGNITION AND MACHINE LEARNING CHAPTER 13: SEQUENTIAL DATA Contents in latter part Linear Dynamical Systems What is different from HMM? Kalman filter Its strength and limitation Particle Filter
PATTERN RECOGNITION AND MACHINE LEARNING CHAPTER 13: SEQUENTIAL DATA Contents in latter part Linear Dynamical Systems What is different from HMM? Kalman filter Its strength and limitation Particle Filter
Approximate Bayesian Computation and Particle Filters
 Approximate Bayesian Computation and Particle Filters Dennis Prangle Reading University 5th February 2014 Introduction Talk is mostly a literature review A few comments on my own ongoing research See Jasra
Approximate Bayesian Computation and Particle Filters Dennis Prangle Reading University 5th February 2014 Introduction Talk is mostly a literature review A few comments on my own ongoing research See Jasra
STA 4273H: Statistical Machine Learning
 STA 4273H: Statistical Machine Learning Russ Salakhutdinov Department of Statistics! rsalakhu@utstat.toronto.edu! http://www.utstat.utoronto.ca/~rsalakhu/ Sidney Smith Hall, Room 6002 Lecture 11 Project
STA 4273H: Statistical Machine Learning Russ Salakhutdinov Department of Statistics! rsalakhu@utstat.toronto.edu! http://www.utstat.utoronto.ca/~rsalakhu/ Sidney Smith Hall, Room 6002 Lecture 11 Project
Linear Dynamical Systems
 Linear Dynamical Systems Sargur N. srihari@cedar.buffalo.edu Machine Learning Course: http://www.cedar.buffalo.edu/~srihari/cse574/index.html Two Models Described by Same Graph Latent variables Observations
Linear Dynamical Systems Sargur N. srihari@cedar.buffalo.edu Machine Learning Course: http://www.cedar.buffalo.edu/~srihari/cse574/index.html Two Models Described by Same Graph Latent variables Observations
Least Squares Estimators for Stochastic Differential Equations Driven by Small Lévy Noises
 Least Squares Estimators for Stochastic Differential Equations Driven by Small Lévy Noises Hongwei Long* Department of Mathematical Sciences, Florida Atlantic University, Boca Raton Florida 33431-991,
Least Squares Estimators for Stochastic Differential Equations Driven by Small Lévy Noises Hongwei Long* Department of Mathematical Sciences, Florida Atlantic University, Boca Raton Florida 33431-991,
Density Propagation for Continuous Temporal Chains Generative and Discriminative Models
 $ Technical Report, University of Toronto, CSRG-501, October 2004 Density Propagation for Continuous Temporal Chains Generative and Discriminative Models Cristian Sminchisescu and Allan Jepson Department
$ Technical Report, University of Toronto, CSRG-501, October 2004 Density Propagation for Continuous Temporal Chains Generative and Discriminative Models Cristian Sminchisescu and Allan Jepson Department
Likelihood-free MCMC
 Bayesian inference for stable distributions with applications in finance Department of Mathematics University of Leicester September 2, 2011 MSc project final presentation Outline 1 2 3 4 Classical Monte
Bayesian inference for stable distributions with applications in finance Department of Mathematics University of Leicester September 2, 2011 MSc project final presentation Outline 1 2 3 4 Classical Monte
Sequential Monte Carlo Methods for Bayesian Computation
 Sequential Monte Carlo Methods for Bayesian Computation A. Doucet Kyoto Sept. 2012 A. Doucet (MLSS Sept. 2012) Sept. 2012 1 / 136 Motivating Example 1: Generic Bayesian Model Let X be a vector parameter
Sequential Monte Carlo Methods for Bayesian Computation A. Doucet Kyoto Sept. 2012 A. Doucet (MLSS Sept. 2012) Sept. 2012 1 / 136 Motivating Example 1: Generic Bayesian Model Let X be a vector parameter
State-Space Methods for Inferring Spike Trains from Calcium Imaging
 State-Space Methods for Inferring Spike Trains from Calcium Imaging Joshua Vogelstein Johns Hopkins April 23, 2009 Joshua Vogelstein (Johns Hopkins) State-Space Calcium Imaging April 23, 2009 1 / 78 Outline
State-Space Methods for Inferring Spike Trains from Calcium Imaging Joshua Vogelstein Johns Hopkins April 23, 2009 Joshua Vogelstein (Johns Hopkins) State-Space Calcium Imaging April 23, 2009 1 / 78 Outline
Bayesian Nonparametric Learning of Complex Dynamical Phenomena
 Duke University Department of Statistical Science Bayesian Nonparametric Learning of Complex Dynamical Phenomena Emily Fox Joint work with Erik Sudderth (Brown University), Michael Jordan (UC Berkeley),
Duke University Department of Statistical Science Bayesian Nonparametric Learning of Complex Dynamical Phenomena Emily Fox Joint work with Erik Sudderth (Brown University), Michael Jordan (UC Berkeley),
An introduction to Sequential Monte Carlo
 An introduction to Sequential Monte Carlo Thang Bui Jes Frellsen Department of Engineering University of Cambridge Research and Communication Club 6 February 2014 1 Sequential Monte Carlo (SMC) methods
An introduction to Sequential Monte Carlo Thang Bui Jes Frellsen Department of Engineering University of Cambridge Research and Communication Club 6 February 2014 1 Sequential Monte Carlo (SMC) methods
EVALUATING SYMMETRIC INFORMATION GAP BETWEEN DYNAMICAL SYSTEMS USING PARTICLE FILTER
 EVALUATING SYMMETRIC INFORMATION GAP BETWEEN DYNAMICAL SYSTEMS USING PARTICLE FILTER Zhen Zhen 1, Jun Young Lee 2, and Abdus Saboor 3 1 Mingde College, Guizhou University, China zhenz2000@21cn.com 2 Department
EVALUATING SYMMETRIC INFORMATION GAP BETWEEN DYNAMICAL SYSTEMS USING PARTICLE FILTER Zhen Zhen 1, Jun Young Lee 2, and Abdus Saboor 3 1 Mingde College, Guizhou University, China zhenz2000@21cn.com 2 Department
Auxiliary Particle Methods
 Auxiliary Particle Methods Perspectives & Applications Adam M. Johansen 1 adam.johansen@bristol.ac.uk Oxford University Man Institute 29th May 2008 1 Collaborators include: Arnaud Doucet, Nick Whiteley
Auxiliary Particle Methods Perspectives & Applications Adam M. Johansen 1 adam.johansen@bristol.ac.uk Oxford University Man Institute 29th May 2008 1 Collaborators include: Arnaud Doucet, Nick Whiteley
Kernel Sequential Monte Carlo
 Kernel Sequential Monte Carlo Ingmar Schuster (Paris Dauphine) Heiko Strathmann (University College London) Brooks Paige (Oxford) Dino Sejdinovic (Oxford) * equal contribution April 25, 2016 1 / 37 Section
Kernel Sequential Monte Carlo Ingmar Schuster (Paris Dauphine) Heiko Strathmann (University College London) Brooks Paige (Oxford) Dino Sejdinovic (Oxford) * equal contribution April 25, 2016 1 / 37 Section
Unobserved. Components and. Time Series. Econometrics. Edited by. Siem Jan Koopman. and Neil Shephard OXFORD UNIVERSITY PRESS
 Unobserved Components and Time Series Econometrics Edited by Siem Jan Koopman and Neil Shephard OXFORD UNIVERSITY PRESS CONTENTS LIST OF FIGURES LIST OF TABLES ix XV 1 Introduction 1 Siem Jan Koopman and
Unobserved Components and Time Series Econometrics Edited by Siem Jan Koopman and Neil Shephard OXFORD UNIVERSITY PRESS CONTENTS LIST OF FIGURES LIST OF TABLES ix XV 1 Introduction 1 Siem Jan Koopman and
Recent Advances in Bayesian Inference Techniques
 Recent Advances in Bayesian Inference Techniques Christopher M. Bishop Microsoft Research, Cambridge, U.K. research.microsoft.com/~cmbishop SIAM Conference on Data Mining, April 2004 Abstract Bayesian
Recent Advances in Bayesian Inference Techniques Christopher M. Bishop Microsoft Research, Cambridge, U.K. research.microsoft.com/~cmbishop SIAM Conference on Data Mining, April 2004 Abstract Bayesian
Gaussian Process Approximations of Stochastic Differential Equations
 Gaussian Process Approximations of Stochastic Differential Equations Cédric Archambeau Centre for Computational Statistics and Machine Learning University College London c.archambeau@cs.ucl.ac.uk CSML
Gaussian Process Approximations of Stochastic Differential Equations Cédric Archambeau Centre for Computational Statistics and Machine Learning University College London c.archambeau@cs.ucl.ac.uk CSML
RAO-BLACKWELLISED PARTICLE FILTERS: EXAMPLES OF APPLICATIONS
 RAO-BLACKWELLISED PARTICLE FILTERS: EXAMPLES OF APPLICATIONS Frédéric Mustière e-mail: mustiere@site.uottawa.ca Miodrag Bolić e-mail: mbolic@site.uottawa.ca Martin Bouchard e-mail: bouchard@site.uottawa.ca
RAO-BLACKWELLISED PARTICLE FILTERS: EXAMPLES OF APPLICATIONS Frédéric Mustière e-mail: mustiere@site.uottawa.ca Miodrag Bolić e-mail: mbolic@site.uottawa.ca Martin Bouchard e-mail: bouchard@site.uottawa.ca
STA 4273H: Statistical Machine Learning
 STA 4273H: Statistical Machine Learning Russ Salakhutdinov Department of Computer Science! Department of Statistical Sciences! rsalakhu@cs.toronto.edu! h0p://www.cs.utoronto.ca/~rsalakhu/ Lecture 7 Approximate
STA 4273H: Statistical Machine Learning Russ Salakhutdinov Department of Computer Science! Department of Statistical Sciences! rsalakhu@cs.toronto.edu! h0p://www.cs.utoronto.ca/~rsalakhu/ Lecture 7 Approximate
STA 414/2104: Machine Learning
 STA 414/2104: Machine Learning Russ Salakhutdinov Department of Computer Science! Department of Statistics! rsalakhu@cs.toronto.edu! http://www.cs.toronto.edu/~rsalakhu/ Lecture 9 Sequential Data So far
STA 414/2104: Machine Learning Russ Salakhutdinov Department of Computer Science! Department of Statistics! rsalakhu@cs.toronto.edu! http://www.cs.toronto.edu/~rsalakhu/ Lecture 9 Sequential Data So far
A central limit theorem with application to inference in α-stable regression models
 Central Limit Theorem for the α-stable Distribution A central limit theorem with application to inference in α-stable regression models Marina Riabiz Tohid Ardeshiri Simon J Godsill Department of Engineering
Central Limit Theorem for the α-stable Distribution A central limit theorem with application to inference in α-stable regression models Marina Riabiz Tohid Ardeshiri Simon J Godsill Department of Engineering
Bayesian Monte Carlo Filtering for Stochastic Volatility Models
 Bayesian Monte Carlo Filtering for Stochastic Volatility Models Roberto Casarin CEREMADE University Paris IX (Dauphine) and Dept. of Economics University Ca Foscari, Venice Abstract Modelling of the financial
Bayesian Monte Carlo Filtering for Stochastic Volatility Models Roberto Casarin CEREMADE University Paris IX (Dauphine) and Dept. of Economics University Ca Foscari, Venice Abstract Modelling of the financial
Bayesian Methods for Machine Learning
 Bayesian Methods for Machine Learning CS 584: Big Data Analytics Material adapted from Radford Neal s tutorial (http://ftp.cs.utoronto.ca/pub/radford/bayes-tut.pdf), Zoubin Ghahramni (http://hunch.net/~coms-4771/zoubin_ghahramani_bayesian_learning.pdf),
Bayesian Methods for Machine Learning CS 584: Big Data Analytics Material adapted from Radford Neal s tutorial (http://ftp.cs.utoronto.ca/pub/radford/bayes-tut.pdf), Zoubin Ghahramni (http://hunch.net/~coms-4771/zoubin_ghahramani_bayesian_learning.pdf),
Hierarchical Bayesian approaches for robust inference in ARX models
 Hierarchical Bayesian approaches for robust inference in ARX models Johan Dahlin, Fredrik Lindsten, Thomas Bo Schön and Adrian George Wills Linköping University Post Print N.B.: When citing this work,
Hierarchical Bayesian approaches for robust inference in ARX models Johan Dahlin, Fredrik Lindsten, Thomas Bo Schön and Adrian George Wills Linköping University Post Print N.B.: When citing this work,
An efficient stochastic approximation EM algorithm using conditional particle filters
 An efficient stochastic approximation EM algorithm using conditional particle filters Fredrik Lindsten Linköping University Post Print N.B.: When citing this work, cite the original article. Original Publication:
An efficient stochastic approximation EM algorithm using conditional particle filters Fredrik Lindsten Linköping University Post Print N.B.: When citing this work, cite the original article. Original Publication:
The Particle Filter. PD Dr. Rudolph Triebel Computer Vision Group. Machine Learning for Computer Vision
 The Particle Filter Non-parametric implementation of Bayes filter Represents the belief (posterior) random state samples. by a set of This representation is approximate. Can represent distributions that
The Particle Filter Non-parametric implementation of Bayes filter Represents the belief (posterior) random state samples. by a set of This representation is approximate. Can represent distributions that
Bayesian harmonic models for musical signal analysis. Simon Godsill and Manuel Davy
 Bayesian harmonic models for musical signal analysis Simon Godsill and Manuel Davy June 2, 2002 Cambridge University Engineering Department and IRCCyN UMR CNRS 6597 The work of both authors was partially
Bayesian harmonic models for musical signal analysis Simon Godsill and Manuel Davy June 2, 2002 Cambridge University Engineering Department and IRCCyN UMR CNRS 6597 The work of both authors was partially
ABC methods for phase-type distributions with applications in insurance risk problems
 ABC methods for phase-type with applications problems Concepcion Ausin, Department of Statistics, Universidad Carlos III de Madrid Joint work with: Pedro Galeano, Universidad Carlos III de Madrid Simon
ABC methods for phase-type with applications problems Concepcion Ausin, Department of Statistics, Universidad Carlos III de Madrid Joint work with: Pedro Galeano, Universidad Carlos III de Madrid Simon
Time Series Analysis. James D. Hamilton PRINCETON UNIVERSITY PRESS PRINCETON, NEW JERSEY
 Time Series Analysis James D. Hamilton PRINCETON UNIVERSITY PRESS PRINCETON, NEW JERSEY PREFACE xiii 1 Difference Equations 1.1. First-Order Difference Equations 1 1.2. pth-order Difference Equations 7
Time Series Analysis James D. Hamilton PRINCETON UNIVERSITY PRESS PRINCETON, NEW JERSEY PREFACE xiii 1 Difference Equations 1.1. First-Order Difference Equations 1 1.2. pth-order Difference Equations 7
Bayesian Networks BY: MOHAMAD ALSABBAGH
 Bayesian Networks BY: MOHAMAD ALSABBAGH Outlines Introduction Bayes Rule Bayesian Networks (BN) Representation Size of a Bayesian Network Inference via BN BN Learning Dynamic BN Introduction Conditional
Bayesian Networks BY: MOHAMAD ALSABBAGH Outlines Introduction Bayes Rule Bayesian Networks (BN) Representation Size of a Bayesian Network Inference via BN BN Learning Dynamic BN Introduction Conditional
STA414/2104. Lecture 11: Gaussian Processes. Department of Statistics
 STA414/2104 Lecture 11: Gaussian Processes Department of Statistics www.utstat.utoronto.ca Delivered by Mark Ebden with thanks to Russ Salakhutdinov Outline Gaussian Processes Exam review Course evaluations
STA414/2104 Lecture 11: Gaussian Processes Department of Statistics www.utstat.utoronto.ca Delivered by Mark Ebden with thanks to Russ Salakhutdinov Outline Gaussian Processes Exam review Course evaluations
Modelling Operational Risk Using Bayesian Inference
 Pavel V. Shevchenko Modelling Operational Risk Using Bayesian Inference 4y Springer 1 Operational Risk and Basel II 1 1.1 Introduction to Operational Risk 1 1.2 Defining Operational Risk 4 1.3 Basel II
Pavel V. Shevchenko Modelling Operational Risk Using Bayesian Inference 4y Springer 1 Operational Risk and Basel II 1 1.1 Introduction to Operational Risk 1 1.2 Defining Operational Risk 4 1.3 Basel II
Learning Static Parameters in Stochastic Processes
 Learning Static Parameters in Stochastic Processes Bharath Ramsundar December 14, 2012 1 Introduction Consider a Markovian stochastic process X T evolving (perhaps nonlinearly) over time variable T. We
Learning Static Parameters in Stochastic Processes Bharath Ramsundar December 14, 2012 1 Introduction Consider a Markovian stochastic process X T evolving (perhaps nonlinearly) over time variable T. We
Continuous State MRF s
 EE64 Digital Image Processing II: Purdue University VISE - December 4, Continuous State MRF s Topics to be covered: Quadratic functions Non-Convex functions Continuous MAP estimation Convex functions EE64
EE64 Digital Image Processing II: Purdue University VISE - December 4, Continuous State MRF s Topics to be covered: Quadratic functions Non-Convex functions Continuous MAP estimation Convex functions EE64
Kalman filtering and friends: Inference in time series models. Herke van Hoof slides mostly by Michael Rubinstein
 Kalman filtering and friends: Inference in time series models Herke van Hoof slides mostly by Michael Rubinstein Problem overview Goal Estimate most probable state at time k using measurement up to time
Kalman filtering and friends: Inference in time series models Herke van Hoof slides mostly by Michael Rubinstein Problem overview Goal Estimate most probable state at time k using measurement up to time
Introduction to Machine Learning
 Introduction to Machine Learning Brown University CSCI 1950-F, Spring 2012 Prof. Erik Sudderth Lecture 25: Markov Chain Monte Carlo (MCMC) Course Review and Advanced Topics Many figures courtesy Kevin
Introduction to Machine Learning Brown University CSCI 1950-F, Spring 2012 Prof. Erik Sudderth Lecture 25: Markov Chain Monte Carlo (MCMC) Course Review and Advanced Topics Many figures courtesy Kevin
Fundamental Issues in Bayesian Functional Data Analysis. Dennis D. Cox Rice University
 Fundamental Issues in Bayesian Functional Data Analysis Dennis D. Cox Rice University 1 Introduction Question: What are functional data? Answer: Data that are functions of a continuous variable.... say
Fundamental Issues in Bayesian Functional Data Analysis Dennis D. Cox Rice University 1 Introduction Question: What are functional data? Answer: Data that are functions of a continuous variable.... say
Hmms with variable dimension structures and extensions
 Hmm days/enst/january 21, 2002 1 Hmms with variable dimension structures and extensions Christian P. Robert Université Paris Dauphine www.ceremade.dauphine.fr/ xian Hmm days/enst/january 21, 2002 2 1 Estimating
Hmm days/enst/january 21, 2002 1 Hmms with variable dimension structures and extensions Christian P. Robert Université Paris Dauphine www.ceremade.dauphine.fr/ xian Hmm days/enst/january 21, 2002 2 1 Estimating
Master 2 Informatique Probabilistic Learning and Data Analysis
 Master 2 Informatique Probabilistic Learning and Data Analysis Faicel Chamroukhi Maître de Conférences USTV, LSIS UMR CNRS 7296 email: chamroukhi@univ-tln.fr web: chamroukhi.univ-tln.fr 2013/2014 Faicel
Master 2 Informatique Probabilistic Learning and Data Analysis Faicel Chamroukhi Maître de Conférences USTV, LSIS UMR CNRS 7296 email: chamroukhi@univ-tln.fr web: chamroukhi.univ-tln.fr 2013/2014 Faicel
Hidden Markov Models for precipitation
 Hidden Markov Models for precipitation Pierre Ailliot Université de Brest Joint work with Peter Thomson Statistics Research Associates (NZ) Page 1 Context Part of the project Climate-related risks for
Hidden Markov Models for precipitation Pierre Ailliot Université de Brest Joint work with Peter Thomson Statistics Research Associates (NZ) Page 1 Context Part of the project Climate-related risks for
Exercises Tutorial at ICASSP 2016 Learning Nonlinear Dynamical Models Using Particle Filters
 Exercises Tutorial at ICASSP 216 Learning Nonlinear Dynamical Models Using Particle Filters Andreas Svensson, Johan Dahlin and Thomas B. Schön March 18, 216 Good luck! 1 [Bootstrap particle filter for
Exercises Tutorial at ICASSP 216 Learning Nonlinear Dynamical Models Using Particle Filters Andreas Svensson, Johan Dahlin and Thomas B. Schön March 18, 216 Good luck! 1 [Bootstrap particle filter for
Machine Learning for OR & FE
 Machine Learning for OR & FE Hidden Markov Models Martin Haugh Department of Industrial Engineering and Operations Research Columbia University Email: martin.b.haugh@gmail.com Additional References: David
Machine Learning for OR & FE Hidden Markov Models Martin Haugh Department of Industrial Engineering and Operations Research Columbia University Email: martin.b.haugh@gmail.com Additional References: David
Particle Learning and Smoothing
 Particle Learning and Smoothing Carlos Carvalho, Michael Johannes, Hedibert Lopes and Nicholas Polson This version: September 2009 First draft: December 2007 Abstract In this paper we develop particle
Particle Learning and Smoothing Carlos Carvalho, Michael Johannes, Hedibert Lopes and Nicholas Polson This version: September 2009 First draft: December 2007 Abstract In this paper we develop particle
Assessment of Nonlinear Dynamic Models by Kolmogorov Smirnov Statistics
 IEEE TRANSACTIONS ON SIGNAL PROCESSING, VOL 58, NO 10, OCTOBER 2010 5069 Assessment of Nonlinear Dynamic Models by Kolmogorov Smirnov Statistics Petar M Djuric, Fellow, IEEE, and Joaquín Míguez, Member,
IEEE TRANSACTIONS ON SIGNAL PROCESSING, VOL 58, NO 10, OCTOBER 2010 5069 Assessment of Nonlinear Dynamic Models by Kolmogorov Smirnov Statistics Petar M Djuric, Fellow, IEEE, and Joaquín Míguez, Member,
A Note on Auxiliary Particle Filters
 A Note on Auxiliary Particle Filters Adam M. Johansen a,, Arnaud Doucet b a Department of Mathematics, University of Bristol, UK b Departments of Statistics & Computer Science, University of British Columbia,
A Note on Auxiliary Particle Filters Adam M. Johansen a,, Arnaud Doucet b a Department of Mathematics, University of Bristol, UK b Departments of Statistics & Computer Science, University of British Columbia,
STONY BROOK UNIVERSITY. CEAS Technical Report 829
 1 STONY BROOK UNIVERSITY CEAS Technical Report 829 Variable and Multiple Target Tracking by Particle Filtering and Maximum Likelihood Monte Carlo Method Jaechan Lim January 4, 2006 2 Abstract In most applications
1 STONY BROOK UNIVERSITY CEAS Technical Report 829 Variable and Multiple Target Tracking by Particle Filtering and Maximum Likelihood Monte Carlo Method Jaechan Lim January 4, 2006 2 Abstract In most applications
Brief introduction to Markov Chain Monte Carlo
 Brief introduction to Department of Probability and Mathematical Statistics seminar Stochastic modeling in economics and finance November 7, 2011 Brief introduction to Content 1 and motivation Classical
Brief introduction to Department of Probability and Mathematical Statistics seminar Stochastic modeling in economics and finance November 7, 2011 Brief introduction to Content 1 and motivation Classical
Non-Parametric Bayes
 Non-Parametric Bayes Mark Schmidt UBC Machine Learning Reading Group January 2016 Current Hot Topics in Machine Learning Bayesian learning includes: Gaussian processes. Approximate inference. Bayesian
Non-Parametric Bayes Mark Schmidt UBC Machine Learning Reading Group January 2016 Current Hot Topics in Machine Learning Bayesian learning includes: Gaussian processes. Approximate inference. Bayesian
A short introduction to INLA and R-INLA
 A short introduction to INLA and R-INLA Integrated Nested Laplace Approximation Thomas Opitz, BioSP, INRA Avignon Workshop: Theory and practice of INLA and SPDE November 7, 2018 2/21 Plan for this talk
A short introduction to INLA and R-INLA Integrated Nested Laplace Approximation Thomas Opitz, BioSP, INRA Avignon Workshop: Theory and practice of INLA and SPDE November 7, 2018 2/21 Plan for this talk
Measurements made for web data, media (IP Radio and TV, BBC Iplayer: Port 80 TCP) and VoIP (Skype: Port UDP) traffic.
 and VoIP (Skype: Port UDP) traffic.") Real time statistical measurements of IPT(Inter-Packet time) of network traffic were done by designing and coding of efficient measurement tools based on the Libpcap package. Traditional Approach of measuring
Real time statistical measurements of IPT(Inter-Packet time) of network traffic were done by designing and coding of efficient measurement tools based on the Libpcap package. Traditional Approach of measuring
An Alternative to CARMA Models via Iterations of Ornstein Uhlenbeck Processes
 An Alternative to CARMA Models via Iterations of Ornstein Uhlenbeck Processes Argimiro Arratia, Alejandra Cabaña, and Enrique M. Cabaña Abstract We present a new construction of continuous ARMA processes
An Alternative to CARMA Models via Iterations of Ornstein Uhlenbeck Processes Argimiro Arratia, Alejandra Cabaña, and Enrique M. Cabaña Abstract We present a new construction of continuous ARMA processes
Human Pose Tracking I: Basics. David Fleet University of Toronto
 Human Pose Tracking I: Basics David Fleet University of Toronto CIFAR Summer School, 2009 Looking at People Challenges: Complex pose / motion People have many degrees of freedom, comprising an articulated
Human Pose Tracking I: Basics David Fleet University of Toronto CIFAR Summer School, 2009 Looking at People Challenges: Complex pose / motion People have many degrees of freedom, comprising an articulated
Lecture 2: From Linear Regression to Kalman Filter and Beyond
 Lecture 2: From Linear Regression to Kalman Filter and Beyond January 18, 2017 Contents 1 Batch and Recursive Estimation 2 Towards Bayesian Filtering 3 Kalman Filter and Bayesian Filtering and Smoothing
Lecture 2: From Linear Regression to Kalman Filter and Beyond January 18, 2017 Contents 1 Batch and Recursive Estimation 2 Towards Bayesian Filtering 3 Kalman Filter and Bayesian Filtering and Smoothing
State Estimation using Moving Horizon Estimation and Particle Filtering
 State Estimation using Moving Horizon Estimation and Particle Filtering James B. Rawlings Department of Chemical and Biological Engineering UW Math Probability Seminar Spring 2009 Rawlings MHE & PF 1 /
State Estimation using Moving Horizon Estimation and Particle Filtering James B. Rawlings Department of Chemical and Biological Engineering UW Math Probability Seminar Spring 2009 Rawlings MHE & PF 1 /
Robert Collins CSE586, PSU Intro to Sampling Methods
 Robert Collins Intro to Sampling Methods CSE586 Computer Vision II Penn State Univ Robert Collins A Brief Overview of Sampling Monte Carlo Integration Sampling and Expected Values Inverse Transform Sampling
Robert Collins Intro to Sampling Methods CSE586 Computer Vision II Penn State Univ Robert Collins A Brief Overview of Sampling Monte Carlo Integration Sampling and Expected Values Inverse Transform Sampling
Computer Intensive Methods in Mathematical Statistics
 Computer Intensive Methods in Mathematical Statistics Department of mathematics johawes@kth.se Lecture 5 Sequential Monte Carlo methods I 31 March 2017 Computer Intensive Methods (1) Plan of today s lecture
Computer Intensive Methods in Mathematical Statistics Department of mathematics johawes@kth.se Lecture 5 Sequential Monte Carlo methods I 31 March 2017 Computer Intensive Methods (1) Plan of today s lecture
F denotes cumulative density. denotes probability density function; (.)
") BAYESIAN ANALYSIS: FOREWORDS Notation. System means the real thing and a model is an assumed mathematical form for the system.. he probability model class M contains the set of the all admissible models
BAYESIAN ANALYSIS: FOREWORDS Notation. System means the real thing and a model is an assumed mathematical form for the system.. he probability model class M contains the set of the all admissible models
Markov chain Monte Carlo methods for visual tracking
 Markov chain Monte Carlo methods for visual tracking Ray Luo rluo@cory.eecs.berkeley.edu Department of Electrical Engineering and Computer Sciences University of California, Berkeley Berkeley, CA 94720
Markov chain Monte Carlo methods for visual tracking Ray Luo rluo@cory.eecs.berkeley.edu Department of Electrical Engineering and Computer Sciences University of California, Berkeley Berkeley, CA 94720
Research Division Federal Reserve Bank of St. Louis Working Paper Series
 Research Division Federal Reserve Bank of St Louis Working Paper Series Kalman Filtering with Truncated Normal State Variables for Bayesian Estimation of Macroeconomic Models Michael Dueker Working Paper
Research Division Federal Reserve Bank of St Louis Working Paper Series Kalman Filtering with Truncated Normal State Variables for Bayesian Estimation of Macroeconomic Models Michael Dueker Working Paper
Dynamical Models for Tracking with the Variable Rate Particle Filter
 Dynamical Models for Tracking with the Variable Rate Particle Filter Pete Bunch and Simon Godsill Department of Engineering University of Cambridge Cambridge, UK Email: {pb44, sjg}@eng.cam.ac.uk Abstract
Dynamical Models for Tracking with the Variable Rate Particle Filter Pete Bunch and Simon Godsill Department of Engineering University of Cambridge Cambridge, UK Email: {pb44, sjg}@eng.cam.ac.uk Abstract
Lecture 2: From Linear Regression to Kalman Filter and Beyond
 Lecture 2: From Linear Regression to Kalman Filter and Beyond Department of Biomedical Engineering and Computational Science Aalto University January 26, 2012 Contents 1 Batch and Recursive Estimation
Lecture 2: From Linear Regression to Kalman Filter and Beyond Department of Biomedical Engineering and Computational Science Aalto University January 26, 2012 Contents 1 Batch and Recursive Estimation
Sequential Monte Carlo Methods for Bayesian Model Selection in Positron Emission Tomography
 Methods for Bayesian Model Selection in Positron Emission Tomography Yan Zhou John A.D. Aston and Adam M. Johansen 6th January 2014 Y. Zhou J. A. D. Aston and A. M. Johansen Outline Positron emission tomography
Methods for Bayesian Model Selection in Positron Emission Tomography Yan Zhou John A.D. Aston and Adam M. Johansen 6th January 2014 Y. Zhou J. A. D. Aston and A. M. Johansen Outline Positron emission tomography
Extreme Value Analysis and Spatial Extremes
 Extreme Value Analysis and Department of Statistics Purdue University 11/07/2013 Outline Motivation 1 Motivation 2 Extreme Value Theorem and 3 Bayesian Hierarchical Models Copula Models Max-stable Models
Extreme Value Analysis and Department of Statistics Purdue University 11/07/2013 Outline Motivation 1 Motivation 2 Extreme Value Theorem and 3 Bayesian Hierarchical Models Copula Models Max-stable Models
Probabilistic Graphical Models
 Probabilistic Graphical Models Brown University CSCI 2950-P, Spring 2013 Prof. Erik Sudderth Lecture 13: Learning in Gaussian Graphical Models, Non-Gaussian Inference, Monte Carlo Methods Some figures
Probabilistic Graphical Models Brown University CSCI 2950-P, Spring 2013 Prof. Erik Sudderth Lecture 13: Learning in Gaussian Graphical Models, Non-Gaussian Inference, Monte Carlo Methods Some figures
Regular Variation and Extreme Events for Stochastic Processes
 1 Regular Variation and Extreme Events for Stochastic Processes FILIP LINDSKOG Royal Institute of Technology, Stockholm 2005 based on joint work with Henrik Hult www.math.kth.se/ lindskog 2 Extremes for
1 Regular Variation and Extreme Events for Stochastic Processes FILIP LINDSKOG Royal Institute of Technology, Stockholm 2005 based on joint work with Henrik Hult www.math.kth.se/ lindskog 2 Extremes for
Towards a Bayesian model for Cyber Security
 Towards a Bayesian model for Cyber Security Mark Briers (mbriers@turing.ac.uk) Joint work with Henry Clausen and Prof. Niall Adams (Imperial College London) 27 September 2017 The Alan Turing Institute
Towards a Bayesian model for Cyber Security Mark Briers (mbriers@turing.ac.uk) Joint work with Henry Clausen and Prof. Niall Adams (Imperial College London) 27 September 2017 The Alan Turing Institute
Long-Range Dependence and Self-Similarity. c Vladas Pipiras and Murad S. Taqqu
 Long-Range Dependence and Self-Similarity c Vladas Pipiras and Murad S. Taqqu January 24, 2016 Contents Contents 2 Preface 8 List of abbreviations 10 Notation 11 1 A brief overview of times series and
Long-Range Dependence and Self-Similarity c Vladas Pipiras and Murad S. Taqqu January 24, 2016 Contents Contents 2 Preface 8 List of abbreviations 10 Notation 11 1 A brief overview of times series and
Introduction to Machine Learning CMU-10701
 Introduction to Machine Learning CMU-10701 Markov Chain Monte Carlo Methods Barnabás Póczos & Aarti Singh Contents Markov Chain Monte Carlo Methods Goal & Motivation Sampling Rejection Importance Markov
Introduction to Machine Learning CMU-10701 Markov Chain Monte Carlo Methods Barnabás Póczos & Aarti Singh Contents Markov Chain Monte Carlo Methods Goal & Motivation Sampling Rejection Importance Markov
Markov Chain Monte Carlo
 Markov Chain Monte Carlo Michael Johannes Columbia University Nicholas Polson University of Chicago August 28, 2007 1 Introduction The Bayesian solution to any inference problem is a simple rule: compute
Markov Chain Monte Carlo Michael Johannes Columbia University Nicholas Polson University of Chicago August 28, 2007 1 Introduction The Bayesian solution to any inference problem is a simple rule: compute
Artificial Intelligence
 Artificial Intelligence Roman Barták Department of Theoretical Computer Science and Mathematical Logic Summary of last lecture We know how to do probabilistic reasoning over time transition model P(X t
Artificial Intelligence Roman Barták Department of Theoretical Computer Science and Mathematical Logic Summary of last lecture We know how to do probabilistic reasoning over time transition model P(X t
A new iterated filtering algorithm
 A new iterated filtering algorithm Edward Ionides University of Michigan, Ann Arbor ionides@umich.edu Statistics and Nonlinear Dynamics in Biology and Medicine Thursday July 31, 2014 Overview 1 Introduction
A new iterated filtering algorithm Edward Ionides University of Michigan, Ann Arbor ionides@umich.edu Statistics and Nonlinear Dynamics in Biology and Medicine Thursday July 31, 2014 Overview 1 Introduction
Infinite-State Markov-switching for Dynamic. Volatility Models : Web Appendix
 Infinite-State Markov-switching for Dynamic Volatility Models : Web Appendix Arnaud Dufays 1 Centre de Recherche en Economie et Statistique March 19, 2014 1 Comparison of the two MS-GARCH approximations
Infinite-State Markov-switching for Dynamic Volatility Models : Web Appendix Arnaud Dufays 1 Centre de Recherche en Economie et Statistique March 19, 2014 1 Comparison of the two MS-GARCH approximations
Default Priors and Effcient Posterior Computation in Bayesian
 Default Priors and Effcient Posterior Computation in Bayesian Factor Analysis January 16, 2010 Presented by Eric Wang, Duke University Background and Motivation A Brief Review of Parameter Expansion Literature
Default Priors and Effcient Posterior Computation in Bayesian Factor Analysis January 16, 2010 Presented by Eric Wang, Duke University Background and Motivation A Brief Review of Parameter Expansion Literature
1 What is a hidden Markov model?
 1 What is a hidden Markov model? Consider a Markov chain {X k }, where k is a non-negative integer. Suppose {X k } embedded in signals corrupted by some noise. Indeed, {X k } is hidden due to noise and
1 What is a hidden Markov model? Consider a Markov chain {X k }, where k is a non-negative integer. Suppose {X k } embedded in signals corrupted by some noise. Indeed, {X k } is hidden due to noise and
Sequential Bayesian Updating
 BS2 Statistical Inference, Lectures 14 and 15, Hilary Term 2009 May 28, 2009 We consider data arriving sequentially X 1,..., X n,... and wish to update inference on an unknown parameter θ online. In a
BS2 Statistical Inference, Lectures 14 and 15, Hilary Term 2009 May 28, 2009 We consider data arriving sequentially X 1,..., X n,... and wish to update inference on an unknown parameter θ online. In a
Hidden Markov Models. By Parisa Abedi. Slides courtesy: Eric Xing
 Hidden Markov Models By Parisa Abedi Slides courtesy: Eric Xing i.i.d to sequential data So far we assumed independent, identically distributed data Sequential (non i.i.d.) data Time-series data E.g. Speech
Hidden Markov Models By Parisa Abedi Slides courtesy: Eric Xing i.i.d to sequential data So far we assumed independent, identically distributed data Sequential (non i.i.d.) data Time-series data E.g. Speech
Self Adaptive Particle Filter
 Self Adaptive Particle Filter Alvaro Soto Pontificia Universidad Catolica de Chile Department of Computer Science Vicuna Mackenna 4860 (143), Santiago 22, Chile asoto@ing.puc.cl Abstract The particle filter
Self Adaptive Particle Filter Alvaro Soto Pontificia Universidad Catolica de Chile Department of Computer Science Vicuna Mackenna 4860 (143), Santiago 22, Chile asoto@ing.puc.cl Abstract The particle filter
Chapter 4 Dynamic Bayesian Networks Fall Jin Gu, Michael Zhang
 Chapter 4 Dynamic Bayesian Networks 2016 Fall Jin Gu, Michael Zhang Reviews: BN Representation Basic steps for BN representations Define variables Define the preliminary relations between variables Check
Chapter 4 Dynamic Bayesian Networks 2016 Fall Jin Gu, Michael Zhang Reviews: BN Representation Basic steps for BN representations Define variables Define the preliminary relations between variables Check
CPSC 540: Machine Learning
 CPSC 540: Machine Learning MCMC and Non-Parametric Bayes Mark Schmidt University of British Columbia Winter 2016 Admin I went through project proposals: Some of you got a message on Piazza. No news is
CPSC 540: Machine Learning MCMC and Non-Parametric Bayes Mark Schmidt University of British Columbia Winter 2016 Admin I went through project proposals: Some of you got a message on Piazza. No news is
Particle MCMC for Bayesian Microwave Control
 Particle MCMC for Bayesian Microwave Control P. Minvielle 1, A. Todeschini 2, F. Caron 3, P. Del Moral 4, 1 CEA-CESTA, 33114 Le Barp, France 2 INRIA Bordeaux Sud-Ouest, 351, cours de la Liberation, 33405
Particle MCMC for Bayesian Microwave Control P. Minvielle 1, A. Todeschini 2, F. Caron 3, P. Del Moral 4, 1 CEA-CESTA, 33114 Le Barp, France 2 INRIA Bordeaux Sud-Ouest, 351, cours de la Liberation, 33405
Note Set 5: Hidden Markov Models
 Note Set 5: Hidden Markov Models Probabilistic Learning: Theory and Algorithms, CS 274A, Winter 2016 1 Hidden Markov Models (HMMs) 1.1 Introduction Consider observed data vectors x t that are d-dimensional
Note Set 5: Hidden Markov Models Probabilistic Learning: Theory and Algorithms, CS 274A, Winter 2016 1 Hidden Markov Models (HMMs) 1.1 Introduction Consider observed data vectors x t that are d-dimensional
The Scaled Unscented Transformation
 The Scaled Unscented Transformation Simon J. Julier, IDAK Industries, 91 Missouri Blvd., #179 Jefferson City, MO 6519 E-mail:sjulier@idak.com Abstract This paper describes a generalisation of the unscented
The Scaled Unscented Transformation Simon J. Julier, IDAK Industries, 91 Missouri Blvd., #179 Jefferson City, MO 6519 E-mail:sjulier@idak.com Abstract This paper describes a generalisation of the unscented
Monte Carlo Methods. Handbook of. University ofqueensland. Thomas Taimre. Zdravko I. Botev. Dirk P. Kroese. Universite de Montreal
 Handbook of Monte Carlo Methods Dirk P. Kroese University ofqueensland Thomas Taimre University ofqueensland Zdravko I. Botev Universite de Montreal A JOHN WILEY & SONS, INC., PUBLICATION Preface Acknowledgments
Handbook of Monte Carlo Methods Dirk P. Kroese University ofqueensland Thomas Taimre University ofqueensland Zdravko I. Botev Universite de Montreal A JOHN WILEY & SONS, INC., PUBLICATION Preface Acknowledgments
Capturing Network Traffic Dynamics Small Scales. Rolf Riedi
 Capturing Network Traffic Dynamics Small Scales Rolf Riedi Dept of Statistics Stochastic Systems and Modelling in Networking and Finance Part II Dependable Adaptive Systems and Mathematical Modeling Kaiserslautern,
Capturing Network Traffic Dynamics Small Scales Rolf Riedi Dept of Statistics Stochastic Systems and Modelling in Networking and Finance Part II Dependable Adaptive Systems and Mathematical Modeling Kaiserslautern,
STA 4273H: Statistical Machine Learning
 STA 4273H: Statistical Machine Learning Russ Salakhutdinov Department of Statistics! rsalakhu@utstat.toronto.edu! http://www.utstat.utoronto.ca/~rsalakhu/ Sidney Smith Hall, Room 6002 Lecture 7 Approximate
STA 4273H: Statistical Machine Learning Russ Salakhutdinov Department of Statistics! rsalakhu@utstat.toronto.edu! http://www.utstat.utoronto.ca/~rsalakhu/ Sidney Smith Hall, Room 6002 Lecture 7 Approximate
9 Multi-Model State Estimation
 Technion Israel Institute of Technology, Department of Electrical Engineering Estimation and Identification in Dynamical Systems (048825) Lecture Notes, Fall 2009, Prof. N. Shimkin 9 Multi-Model State
Technion Israel Institute of Technology, Department of Electrical Engineering Estimation and Identification in Dynamical Systems (048825) Lecture Notes, Fall 2009, Prof. N. Shimkin 9 Multi-Model State
Approximate Inference
 Approximate Inference Simulation has a name: sampling Sampling is a hot topic in machine learning, and it s really simple Basic idea: Draw N samples from a sampling distribution S Compute an approximate
Approximate Inference Simulation has a name: sampling Sampling is a hot topic in machine learning, and it s really simple Basic idea: Draw N samples from a sampling distribution S Compute an approximate
A note on Reversible Jump Markov Chain Monte Carlo
 A note on Reversible Jump Markov Chain Monte Carlo Hedibert Freitas Lopes Graduate School of Business The University of Chicago 5807 South Woodlawn Avenue Chicago, Illinois 60637 February, 1st 2006 1 Introduction
A note on Reversible Jump Markov Chain Monte Carlo Hedibert Freitas Lopes Graduate School of Business The University of Chicago 5807 South Woodlawn Avenue Chicago, Illinois 60637 February, 1st 2006 1 Introduction
Diagnostic Test for GARCH Models Based on Absolute Residual Autocorrelations
 Diagnostic Test for GARCH Models Based on Absolute Residual Autocorrelations Farhat Iqbal Department of Statistics, University of Balochistan Quetta-Pakistan farhatiqb@gmail.com Abstract In this paper
Diagnostic Test for GARCH Models Based on Absolute Residual Autocorrelations Farhat Iqbal Department of Statistics, University of Balochistan Quetta-Pakistan farhatiqb@gmail.com Abstract In this paper
Markov Chain Monte Carlo methods
 Markov Chain Monte Carlo methods Tomas McKelvey and Lennart Svensson Signal Processing Group Department of Signals and Systems Chalmers University of Technology, Sweden November 26, 2012 Today s learning
Markov Chain Monte Carlo methods Tomas McKelvey and Lennart Svensson Signal Processing Group Department of Signals and Systems Chalmers University of Technology, Sweden November 26, 2012 Today s learning
Applied Bayesian Nonparametrics 3. Infinite Hidden Markov Models
 Applied Bayesian Nonparametrics 3. Infinite Hidden Markov Models Tutorial at CVPR 2012 Erik Sudderth Brown University Work by E. Fox, E. Sudderth, M. Jordan, & A. Willsky AOAS 2011: A Sticky HDP-HMM with
Applied Bayesian Nonparametrics 3. Infinite Hidden Markov Models Tutorial at CVPR 2012 Erik Sudderth Brown University Work by E. Fox, E. Sudderth, M. Jordan, & A. Willsky AOAS 2011: A Sticky HDP-HMM with
Part I State space models
 Part I State space models 1 Introduction to state space time series analysis James Durbin Department of Statistics, London School of Economics and Political Science Abstract The paper presents a broad
Part I State space models 1 Introduction to state space time series analysis James Durbin Department of Statistics, London School of Economics and Political Science Abstract The paper presents a broad
The Poisson transform for unnormalised statistical models. Nicolas Chopin (ENSAE) joint work with Simon Barthelmé (CNRS, Gipsa-LAB)
 joint work with Simon Barthelmé (CNRS, Gipsa-LAB)") The Poisson transform for unnormalised statistical models Nicolas Chopin (ENSAE) joint work with Simon Barthelmé (CNRS, Gipsa-LAB) Part I Unnormalised statistical models Unnormalised statistical models
The Poisson transform for unnormalised statistical models Nicolas Chopin (ENSAE) joint work with Simon Barthelmé (CNRS, Gipsa-LAB) Part I Unnormalised statistical models Unnormalised statistical models
Sensor Fusion: Particle Filter
 Sensor Fusion: Particle Filter By: Gordana Stojceska stojcesk@in.tum.de Outline Motivation Applications Fundamentals Tracking People Advantages and disadvantages Summary June 05 JASS '05, St.Petersburg,
Sensor Fusion: Particle Filter By: Gordana Stojceska stojcesk@in.tum.de Outline Motivation Applications Fundamentals Tracking People Advantages and disadvantages Summary June 05 JASS '05, St.Petersburg,
Multiple Speaker Tracking with the Factorial von Mises- Fisher Filter
 Multiple Speaker Tracking with the Factorial von Mises- Fisher Filter IEEE International Workshop on Machine Learning for Signal Processing Sept 21-24, 2014 Reims, France Johannes Traa, Paris Smaragdis
Multiple Speaker Tracking with the Factorial von Mises- Fisher Filter IEEE International Workshop on Machine Learning for Signal Processing Sept 21-24, 2014 Reims, France Johannes Traa, Paris Smaragdis
Kurume University Faculty of Economics Monograph Collection 18. Theoretical Advances and Applications in. Operations Research. Kyushu University Press
 Kurume University Faculty of Economics Monograph Collection 18 Theoretical Advances and Applications in Operations Research Managing Editor Kangrong Tan General Advisor Joe Gani Kyushu University Press
Kurume University Faculty of Economics Monograph Collection 18 Theoretical Advances and Applications in Operations Research Managing Editor Kangrong Tan General Advisor Joe Gani Kyushu University Press
LINEAR PROGRAMMING-BASED ESTIMATORS IN NONNEGATIVE AUTOREGRESSION
 LINEAR PROGRAMMING-BASED ESTIMATORS IN NONNEGATIVE AUTOREGRESSION DANIEL PREVE JUNE 10, 2013 Abstract. This note studies robust estimation of the autoregressive (AR) parameter in a nonlinear, nonnegative
LINEAR PROGRAMMING-BASED ESTIMATORS IN NONNEGATIVE AUTOREGRESSION DANIEL PREVE JUNE 10, 2013 Abstract. This note studies robust estimation of the autoregressive (AR) parameter in a nonlinear, nonnegative
Normalized kernel-weighted random measures
 Normalized kernel-weighted random measures Jim Griffin University of Kent 1 August 27 Outline 1 Introduction 2 Ornstein-Uhlenbeck DP 3 Generalisations Bayesian Density Regression We observe data (x 1,
Normalized kernel-weighted random measures Jim Griffin University of Kent 1 August 27 Outline 1 Introduction 2 Ornstein-Uhlenbeck DP 3 Generalisations Bayesian Density Regression We observe data (x 1,
Nonparametric Bayesian Methods (Gaussian Processes)
") [70240413 Statistical Machine Learning, Spring, 2015] Nonparametric Bayesian Methods (Gaussian Processes) Jun Zhu dcszj@mail.tsinghua.edu.cn http://bigml.cs.tsinghua.edu.cn/~jun State Key Lab of Intelligent
[70240413 Statistical Machine Learning, Spring, 2015] Nonparametric Bayesian Methods (Gaussian Processes) Jun Zhu dcszj@mail.tsinghua.edu.cn http://bigml.cs.tsinghua.edu.cn/~jun State Key Lab of Intelligent
Probabilistic Graphical Models
 Probabilistic Graphical Models Lecture 12 Dynamical Models CS/CNS/EE 155 Andreas Krause Homework 3 out tonight Start early!! Announcements Project milestones due today Please email to TAs 2 Parameter learning
Probabilistic Graphical Models Lecture 12 Dynamical Models CS/CNS/EE 155 Andreas Krause Homework 3 out tonight Start early!! Announcements Project milestones due today Please email to TAs 2 Parameter learning