Pairs of Tetrahedra with Orthogonal Edges
|
|
|
- Amber Fox
- 5 years ago
- Views:
Transcription

1 Pairs of Tetrahedra with Orthogonal Edges Hans-Peter Schröcker Unit Geometry and CAD Universität Innsbruck 14th Scientific-Professional Colloquium Geometry and Graphics Velika, September
2 Overview Motivation: The control net of Dupin cyclide patches Orthogonal and anti-orthogonal tetrehedra Computation and construction Orthologic tetrahedra Anti-orthogonal tetrahedra with intersecting edges Koebe tetrahedra and other examples The intersection points

3 Part 1 Motivation: The control net of Dupin cyclide patches

4 Dupin cyclides
5 Dupin cyclides

6 The control net of Dupin cyclides
7 Part 2 Orthogonal and anti-orthogonal tetrehedra
8 Orthogonality conditions m i m j, n k n l = 0
9 Tetrahedra with orthogonal edges Corresponding edges ( orthogonal pair ) Non-corresponding edges ( anti-orthogonal pair ) A 0 A 1 B 0 B 1, A 1 A 2 B 1 B 2, A 2 A 3 B 2 B 3, etc. A 0 A 1 B 2 B 3, A 1 A 2 B 0 B 3, A 2 A 3 B 1 B 2, etc. m i m j, n i n j = 0 i = j m i m j, n k n l = 0 i, j, k, l pairwise different
10 Orthogonal pairs computation m 0 m 1, n 0 n 1 = 0 (1) m 0 m 2, n 0 n 2 = 0 (2) m 0 m 3, n 0 n 3 = 0 (3) m 1 m 2, n 1 n 2 = 0 (4) m 1 m 3, n 1 n 3 = 0 (5) m 2 m 3, n 2 n 3 = 0 (6)
11 Orthogonal pairs computation m 0 m 1, n 0 n 1 = 0 (1) m 0 m 2, n 0 n 2 = 0 (2) m 0 m 3, n 0 n 3 = 0 (3) m 1 m 2, n 1 n 2 = 0 (4) m 1 m 3, n 1 n 3 = 0 (5) m 2 m 3, n 2 n 3 = 0 (6) 1. Set z-coordinates to 1, choose n 0 = (x 0, y 0, 1).
12 Orthogonal pairs computation m 0 m 1, n 0 n 1 = 0 (1) m 0 m 2, n 0 n 2 = 0 (2) m 0 m 3, n 0 n 3 = 0 (3) m 1 m 2, n 1 n 2 = 0 (4) m 1 m 3, n 1 n 3 = 0 (5) m 2 m 3, n 2 n 3 = 0 (6) 1. Set z-coordinates to 1, choose n 0 = (x 0, y 0, 1). 2. Solve (1), (2), (3) for x-coordinates of n 1, n 2, n 3 (linear).
13 Orthogonal pairs computation m 0 m 1, n 0 n 1 = 0 (1) m 0 m 2, n 0 n 2 = 0 (2) m 0 m 3, n 0 n 3 = 0 (3) m 1 m 2, n 1 n 2 = 0 (4) m 1 m 3, n 1 n 3 = 0 (5) m 2 m 3, n 2 n 3 = 0 (6) 1. Set z-coordinates to 1, choose n 0 = (x 0, y 0, 1). 2. Solve (1), (2), (3) for x-coordinates of n 1, n 2, n 3 (linear). 3. Solve (4) and (5) for y-coordinates of n 1 and n 2 (linear).
14 Orthogonal pairs computation m 0 m 1, n 0 n 1 = 0 (1) m 0 m 2, n 0 n 2 = 0 (2) m 0 m 3, n 0 n 3 = 0 (3) m 1 m 2, n 1 n 2 = 0 (4) m 1 m 3, n 1 n 3 = 0 (5) m 2 m 3, n 2 n 3 = 0 (6) 1. Set z-coordinates to 1, choose n 0 = (x 0, y 0, 1). 2. Solve (1), (2), (3) for x-coordinates of n 1, n 2, n 3 (linear). 3. Solve (4) and (5) for y-coordinates of n 1 and n 2 (linear). 4. Solve (6) for y-coordinate of n 3 (quadratic, double root).
15 Orthogonal pairs computation m 0 m 1, n 0 n 1 = 0 (1) m 0 m 2, n 0 n 2 = 0 (2) m 0 m 3, n 0 n 3 = 0 (3) m 1 m 2, n 1 n 2 = 0 (4) m 1 m 3, n 1 n 3 = 0 (5) m 2 m 3, n 2 n 3 = 0 (6) 1. Set z-coordinates to 1, choose n 0 = (x 0, y 0, 1). 2. Solve (1), (2), (3) for x-coordinates of n 1, n 2, n 3 (linear). 3. Solve (4) and (5) for y-coordinates of n 1 and n 2 (linear). 4. Solve (6) for y-coordinate of n 3 (quadratic, double root). 5. Forget 1.,..., 4. The solution is n 0 = n 1 = n 2 = n 3.
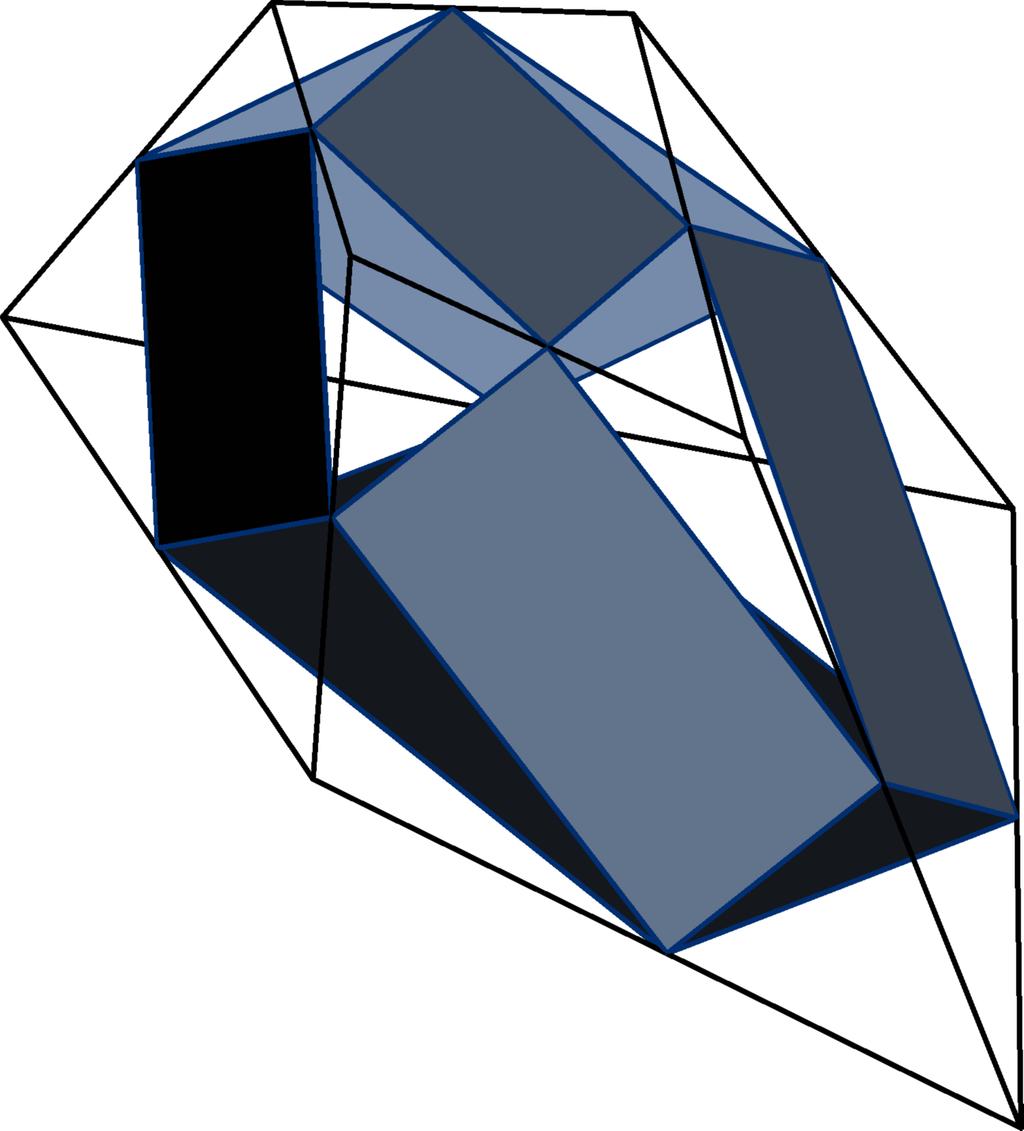
16 Orthogonal pairs construction B 1 A 3 A 2 B 2 A 0 A 1 B 3 B 0 R. Sauer Differenzengeometrie Springer 1970.
17 Anti-orthogonal pairs computation m 0 m 1, n 2 n 3 = 0 (1) m 0 m 2, n 1 n 3 = 0 (2) m 0 m 3, n 1 n 2 = 0 (3) m 1 m 2, n 0 n 3 = 0 (4) m 1 m 3, n 0 n 2 = 0 (5) m 2 m 3, n 0 n 1 = 0 (6)
18 Anti-orthogonal pairs computation m 0 m 1, n 2 n 3 = 0 (1) m 0 m 2, n 1 n 3 = 0 (2) m 0 m 3, n 1 n 2 = 0 (3) m 1 m 2, n 0 n 3 = 0 (4) m 1 m 3, n 0 n 2 = 0 (5) m 2 m 3, n 0 n 1 = 0 (6) 1. Solution analogous to orthogonal case. 2. Last equation vanishes.
19 Flat solutions Construction A 2 A 3 P 2 P 3 B 3 B 0 A 0 A 1 P 0 P 1 B 2 B 1 A. I. Bobenko, Y. B. Suris Discrete Differential Geometrie. Integrable Structure Graduate Studies in Mathematics, vol. 98, AMS 2008

20 Construction by polarization
21 Orthologic triangles (Steiner 1827) The three lines a 1 : A 1 a 1 A, a 1 B 2 C 2 B 2 C 1 c 1 A 2 b 1 : B 1 b 1 B, b 1 A 2 C 2 c 1 : C 1 c 1 C, c 1 A 2 B 2 1 O 1 b1 A 1 B 1 intersect in a point O 1 (orthology center). C 2
22 Orthologic triangles (Steiner 1827) The three lines a 1 : A 1 a 1 A, a 1 B 2 C 2 b 1 : B 1 b 1 B, b 1 A 2 C 2 c 1 : C 1 c 1 C, c 1 A 2 B 2 intersect in a point O 1 (orthology center). B 2 b 2 1 C 1 A 2 c 1 2 O 2 O 1 b1 A 1 B 1 c 2 C 2
23 Orthologic tetrahedra Two tetrahedra A 1 B 1 C 1 D 1 and A 2 B 2 C 2 D 2 are orthologic if the four lines a 1 : A 1 a 1, a 1 B 2 C 2 D 2 b 1 : B 1 b 1, b 1 A 2 C 2 D 2 c 1 : C 1 c 1, c 1 A 2 B 2 D 2 d 1 : D 1 d 1, d 1 A 2 B 2 C 2 intersect in a point (orthology center). J. Neuberg Mémoire sur le tétraèdre Bruxelles, Belgium: F. Hayez, 1884.
24 Orthology and anti-orthogonality Proposition (Neuberg) Two tetrahedra are anti-orthogonal iff they are orthologic.
25 The Stella Octangula

26 Construction from six rectangles
27 Construction from six rectangles

28 Part 3 Anti-orthogonal tetrahedra with intersecting edges

29 Intersecting edges

30 Koebe tetrahedra
31 Orthodiagonal faces

32 Orthodiagonal faces
33 Orthodiagonal faces

34 Non-Koebe examples

35 The sphere of intersection points Theorem The six intersection points lie on a sphere.
36 The sphere of six intersection points \^/ Maple 12 (X86 64 LINUX)._ \ / _. Copyright (c) Maplesoft, a [...] \ MAPLE / All rights reserved. Maple is a [...] < > Waterloo Maple Inc. Type? for help. [...] memory used= mb, alloc=194.0mb, time= memory used= mb, alloc=194.0mb, time= memory used= mb, alloc=194.0mb, time= s 45 min
37 Orthographic projection onto a face plane C Q b P b P M P Q Q A P c Q c B
38 Orthographic projection onto a face plane Q b P b P C M P Q Q B 2 O 2 = D 2 C 1 O 1 A 2 A P c Q c B A 1 B 1 C 2
39 Orthographic projection onto a face plane Q b P b P C M P Q Q B 2 O 2 = D 2 C 1 O 1 A 2 A P c Q c B A 1 B 1 C 2 The sphere center is the midpoint of the orthology centers.

40 The sphere of five intersection points Theorem The five intersection points lie on a sphere.
41 Ideas for future research one-parametric set of anti-orthogonal tetrahedra with intersecting edges topologically dual polyhedra with orthogonal edges anti-orthogonal tetrahedra in non-euclidean spaces
Discrete Laplace Cycles of Period Four
 Discrete Laplace Cycles of Period Four Hans-Peter Schröcker Unit Geometrie and CAD University Innsbruck Conference on Geometry Theory and Applications Vorau, June 2011 Overview Concepts, Motivation, History
Discrete Laplace Cycles of Period Four Hans-Peter Schröcker Unit Geometrie and CAD University Innsbruck Conference on Geometry Theory and Applications Vorau, June 2011 Overview Concepts, Motivation, History
Discrete Differential Geometry: Consistency as Integrability
 Discrete Differential Geometry: Consistency as Integrability Yuri SURIS (TU München) Oberwolfach, March 6, 2006 Based on the ongoing textbook with A. Bobenko Discrete Differential Geometry Differential
Discrete Differential Geometry: Consistency as Integrability Yuri SURIS (TU München) Oberwolfach, March 6, 2006 Based on the ongoing textbook with A. Bobenko Discrete Differential Geometry Differential
USAC Colloquium. Bending Polyhedra. Andrejs Treibergs. September 4, Figure 1: A Rigid Polyhedron. University of Utah
 USAC Colloquium Bending Polyhedra Andrejs Treibergs University of Utah September 4, 2013 Figure 1: A Rigid Polyhedron. 2. USAC Lecture: Bending Polyhedra The URL for these Beamer Slides: BendingPolyhedra
USAC Colloquium Bending Polyhedra Andrejs Treibergs University of Utah September 4, 2013 Figure 1: A Rigid Polyhedron. 2. USAC Lecture: Bending Polyhedra The URL for these Beamer Slides: BendingPolyhedra
Difference Geometry. Hans-Peter Schröcker. July 22 23, Unit Geometry and CAD University Innsbruck
 Difference Geometry Hans-Peter Schröcker Unit Geometry and CAD University Innsbruck July 22 23, 2010 Lecture 1: Introduction Three disciplines Differential geometry infinitesimally neighboring objects
Difference Geometry Hans-Peter Schröcker Unit Geometry and CAD University Innsbruck July 22 23, 2010 Lecture 1: Introduction Three disciplines Differential geometry infinitesimally neighboring objects
arxiv: v1 [math.ag] 7 Jun 2011 Abstract
![arxiv: v1 [math.ag] 7 Jun 2011 Abstract](/thumbs/93/117952514.jpg "arxiv: v1 [math.ag] 7 Jun 2011 Abstract") Darboux Cyclides and Webs from Circles Helmut Pottmann, Ling Shi and Mikhail Skopenkov King Abdullah University of Science and Technology, Thuwal, Saudi Arabia arxiv:1106.1354v1 [math.ag] 7 Jun 2011 Abstract
Darboux Cyclides and Webs from Circles Helmut Pottmann, Ling Shi and Mikhail Skopenkov King Abdullah University of Science and Technology, Thuwal, Saudi Arabia arxiv:1106.1354v1 [math.ag] 7 Jun 2011 Abstract
11.1 Three-Dimensional Coordinate System
 11.1 Three-Dimensional Coordinate System In three dimensions, a point has three coordinates: (x,y,z). The normal orientation of the x, y, and z-axes is shown below. The three axes divide the region into
11.1 Three-Dimensional Coordinate System In three dimensions, a point has three coordinates: (x,y,z). The normal orientation of the x, y, and z-axes is shown below. The three axes divide the region into
Copyright 2016 Pearson Education, Inc. or its affiliates. All rights reserved. NES, the NES logo, Pearson, the Pearson logo, and National Evaluation
 Mathematics (304) Copyright 2016 Pearson Education, Inc. or its affiliates. All rights reserved. NES, the NES logo, Pearson, the Pearson logo, and National Evaluation Series are trademarks, in the U.S.
Mathematics (304) Copyright 2016 Pearson Education, Inc. or its affiliates. All rights reserved. NES, the NES logo, Pearson, the Pearson logo, and National Evaluation Series are trademarks, in the U.S.
A crash course the geometry of hyperbolic surfaces
 Lecture 7 A crash course the geometry of hyperbolic surfaces 7.1 The hyperbolic plane Hyperbolic geometry originally developed in the early 19 th century to prove that the parallel postulate in Euclidean
Lecture 7 A crash course the geometry of hyperbolic surfaces 7.1 The hyperbolic plane Hyperbolic geometry originally developed in the early 19 th century to prove that the parallel postulate in Euclidean
A Four-Body Convex Central Configuration with Perpendicular Diagonals Is Necessarily a Kite
 A Four-Body Convex Central Configuration with Perpendicular Diagonals Is Necessarily a Kite arxiv:1610.08654v1 [math.ca] 27 Oct 2016 Montserrat Corbera Josep M. Cors Gareth E. Roberts November 22, 2017
A Four-Body Convex Central Configuration with Perpendicular Diagonals Is Necessarily a Kite arxiv:1610.08654v1 [math.ca] 27 Oct 2016 Montserrat Corbera Josep M. Cors Gareth E. Roberts November 22, 2017
Isogonal Conjugates in a Tetrahedron
 Forum Geometricorum Volume 16 (2016) 43 50. FORUM GEOM ISSN 1534-1178 Isogonal Conjugates in a Tetrahedron Jawad Sadek, Majid Bani-Yaghoub, and Noah H. Rhee Abstract. The symmedian point of a tetrahedron
Forum Geometricorum Volume 16 (2016) 43 50. FORUM GEOM ISSN 1534-1178 Isogonal Conjugates in a Tetrahedron Jawad Sadek, Majid Bani-Yaghoub, and Noah H. Rhee Abstract. The symmedian point of a tetrahedron
PROJECTIONS OF THE TWISTED CUBIC. Joerg Meyer. 0. Introduction
 THE TEACHING OF MATHEMATICS 2007, Vol. X, 1, pp. 51 62 PROJECTIONS OF THE TWISTED CUBIC Joerg Meyer Abstract. One gets every cubic curve with rational parametrization by projecting the curve with general
THE TEACHING OF MATHEMATICS 2007, Vol. X, 1, pp. 51 62 PROJECTIONS OF THE TWISTED CUBIC Joerg Meyer Abstract. One gets every cubic curve with rational parametrization by projecting the curve with general
The Radii of Hyper Circumsphere and Insphere through Equidistant Points
 Parabola Volume 54, Issue (08) The Radii of Hyper ircumsphere and Insphere through Equidistant Points Sin Keong Tong Three points,, and of equal distance from each other form an equilateral triangle in
Parabola Volume 54, Issue (08) The Radii of Hyper ircumsphere and Insphere through Equidistant Points Sin Keong Tong Three points,, and of equal distance from each other form an equilateral triangle in
King Fahd University of Petroleum and Minerals Prep-Year Math Program Math (001) - Term 181 Recitation (1.1)
 - Term 181 Recitation (1.1)") Recitation (1.1) Question 1: Find a point on the y-axis that is equidistant from the points (5, 5) and (1, 1) Question 2: Find the distance between the points P(2 x, 7 x) and Q( 2 x, 4 x) where x 0. Question
Recitation (1.1) Question 1: Find a point on the y-axis that is equidistant from the points (5, 5) and (1, 1) Question 2: Find the distance between the points P(2 x, 7 x) and Q( 2 x, 4 x) where x 0. Question
The Droz-Farny Circles of a Convex Quadrilateral
 Forum Geometricorum Volume 11 (2011) 109 119. FORUM GEOM ISSN 1534-1178 The Droz-Farny Circles of a Convex Quadrilateral Maria Flavia Mammana, Biagio Micale, and Mario Pennisi Abstract. The Droz-Farny
Forum Geometricorum Volume 11 (2011) 109 119. FORUM GEOM ISSN 1534-1178 The Droz-Farny Circles of a Convex Quadrilateral Maria Flavia Mammana, Biagio Micale, and Mario Pennisi Abstract. The Droz-Farny
Lattice geometry of the Hirota equation
 Lattice geometry of the Hirota equation arxiv:solv-int/9907013v1 8 Jul 1999 Adam Doliwa Instytut Fizyki Teoretycznej, Uniwersytet Warszawski ul. Hoża 69, 00-681 Warszawa, Poland e-mail: doliwa@fuw.edu.pl
Lattice geometry of the Hirota equation arxiv:solv-int/9907013v1 8 Jul 1999 Adam Doliwa Instytut Fizyki Teoretycznej, Uniwersytet Warszawski ul. Hoża 69, 00-681 Warszawa, Poland e-mail: doliwa@fuw.edu.pl
Chapter 3. Riemannian Manifolds - I. The subject of this thesis is to extend the combinatorial curve reconstruction approach to curves
 Chapter 3 Riemannian Manifolds - I The subject of this thesis is to extend the combinatorial curve reconstruction approach to curves embedded in Riemannian manifolds. A Riemannian manifold is an abstraction
Chapter 3 Riemannian Manifolds - I The subject of this thesis is to extend the combinatorial curve reconstruction approach to curves embedded in Riemannian manifolds. A Riemannian manifold is an abstraction
LECTURE 2. (TEXED): IN CLASS: PROBABLY LECTURE 3. MANIFOLDS 1. FALL TANGENT VECTORS.
: IN CLASS: PROBABLY LECTURE 3. MANIFOLDS 1. FALL TANGENT VECTORS.") LECTURE 2. (TEXED): IN CLASS: PROBABLY LECTURE 3. MANIFOLDS 1. FALL 2006. TANGENT VECTORS. Overview: Tangent vectors, spaces and bundles. First: to an embedded manifold of Euclidean space. Then to one
LECTURE 2. (TEXED): IN CLASS: PROBABLY LECTURE 3. MANIFOLDS 1. FALL 2006. TANGENT VECTORS. Overview: Tangent vectors, spaces and bundles. First: to an embedded manifold of Euclidean space. Then to one
BARYCENTRIC COORDINATES
 Computer Graphics Notes BARYCENTRIC COORDINATES Kenneth I. Joy Institute for Data Analysis and Visualization Department of Computer Science University of California, Davis Overview If we are given a frame
Computer Graphics Notes BARYCENTRIC COORDINATES Kenneth I. Joy Institute for Data Analysis and Visualization Department of Computer Science University of California, Davis Overview If we are given a frame
Convergence in shape of Steiner symmetrized line segments. Arthur Korneychuk
 Convergence in shape of Steiner symmetrized line segments by Arthur Korneychuk A thesis submitted in conformity with the requirements for the degree of Master of Science Graduate Department of Mathematics
Convergence in shape of Steiner symmetrized line segments by Arthur Korneychuk A thesis submitted in conformity with the requirements for the degree of Master of Science Graduate Department of Mathematics
Complete Surfaces of Constant Gaussian Curvature in Euclidean Space R 3.
 Summary of the Thesis in Mathematics by Valentina Monaco Complete Surfaces of Constant Gaussian Curvature in Euclidean Space R 3. Thesis Supervisor Prof. Massimiliano Pontecorvo 19 May, 2011 SUMMARY The
Summary of the Thesis in Mathematics by Valentina Monaco Complete Surfaces of Constant Gaussian Curvature in Euclidean Space R 3. Thesis Supervisor Prof. Massimiliano Pontecorvo 19 May, 2011 SUMMARY The
Linear Algebra: Homework 3
 Linear Algebra: Homework 3 Alvin Lin August 206 - December 206 Section.2 Exercise 48 Find all values of the scalar k for which the two vectors are orthogonal. [ ] [ ] 2 k + u v 3 k u v 0 2(k + ) + 3(k
Linear Algebra: Homework 3 Alvin Lin August 206 - December 206 Section.2 Exercise 48 Find all values of the scalar k for which the two vectors are orthogonal. [ ] [ ] 2 k + u v 3 k u v 0 2(k + ) + 3(k
Department of Mathematical and Statistical Sciences University of Alberta
 MATH 214 (R1) Winter 2008 Intermediate Calculus I Solutions to Problem Set #8 Completion Date: Friday March 14, 2008 Department of Mathematical and Statistical Sciences University of Alberta Question 1.
MATH 214 (R1) Winter 2008 Intermediate Calculus I Solutions to Problem Set #8 Completion Date: Friday March 14, 2008 Department of Mathematical and Statistical Sciences University of Alberta Question 1.
GLOBAL, GEOMETRICAL COORDINATES ON FALBEL S CROSS-RATIO VARIETY
 GLOBAL GEOMETRICAL COORDINATES ON FALBEL S CROSS-RATIO VARIETY JOHN R. PARKER & IOANNIS D. PLATIS Abstract. Falbel has shown that four pairwise distinct points on the boundary of complex hyperbolic -space
GLOBAL GEOMETRICAL COORDINATES ON FALBEL S CROSS-RATIO VARIETY JOHN R. PARKER & IOANNIS D. PLATIS Abstract. Falbel has shown that four pairwise distinct points on the boundary of complex hyperbolic -space
3 Scalar Product. 3.0 The Dot Product. ~v ~w := v 1 w 1 + v 2 w v n w n.
 3 Scalar Product Copyright 2017, Gregory G. Smith 28 September 2017 Although vector products on R n are rare, every coordinate space R n is equipped with a binary operation that sends two vectors to a
3 Scalar Product Copyright 2017, Gregory G. Smith 28 September 2017 Although vector products on R n are rare, every coordinate space R n is equipped with a binary operation that sends two vectors to a
PLC Papers Created For:
 PLC Papers Created For: Year 11 Topic Practice Paper: Factorising Quadratics Factorising difficult quadratic expressions 1 Grade 7 Objective: Factorise a quadratic expression of the form ax 2 + bx + c
PLC Papers Created For: Year 11 Topic Practice Paper: Factorising Quadratics Factorising difficult quadratic expressions 1 Grade 7 Objective: Factorise a quadratic expression of the form ax 2 + bx + c
Chapter 13: Vectors and the Geometry of Space
 Chapter 13: Vectors and the Geometry of Space 13.1 3-Dimensional Coordinate System 13.2 Vectors 13.3 The Dot Product 13.4 The Cross Product 13.5 Equations of Lines and Planes 13.6 Cylinders and Quadratic
Chapter 13: Vectors and the Geometry of Space 13.1 3-Dimensional Coordinate System 13.2 Vectors 13.3 The Dot Product 13.4 The Cross Product 13.5 Equations of Lines and Planes 13.6 Cylinders and Quadratic
Chapter 13: Vectors and the Geometry of Space
 Chapter 13: Vectors and the Geometry of Space 13.1 3-Dimensional Coordinate System 13.2 Vectors 13.3 The Dot Product 13.4 The Cross Product 13.5 Equations of Lines and Planes 13.6 Cylinders and Quadratic
Chapter 13: Vectors and the Geometry of Space 13.1 3-Dimensional Coordinate System 13.2 Vectors 13.3 The Dot Product 13.4 The Cross Product 13.5 Equations of Lines and Planes 13.6 Cylinders and Quadratic
Accurate Multiple-Precision Gauss-Legendre Quadrature
 Accurate Multiple-Precision Gauss-Legendre Quadrature Laurent Fousse 1,2 1 Université Henri-Poincaré Nancy 1 2 INRIA Rocquencourt 18th IEEE International Symposium on Computer Arithmetic Outline Motivation
Accurate Multiple-Precision Gauss-Legendre Quadrature Laurent Fousse 1,2 1 Université Henri-Poincaré Nancy 1 2 INRIA Rocquencourt 18th IEEE International Symposium on Computer Arithmetic Outline Motivation
Lecture 9: Random sampling, ɛ-approximation and ɛ-nets
 CPS296.2 Geometric Optimization February 13, 2007 Lecture 9: Random sampling, -approximation and -nets Lecturer: Pankaj K. Agarwal Scribe: Shashidhara K. Ganjugunte In the next few lectures we will be
CPS296.2 Geometric Optimization February 13, 2007 Lecture 9: Random sampling, -approximation and -nets Lecturer: Pankaj K. Agarwal Scribe: Shashidhara K. Ganjugunte In the next few lectures we will be
arxiv: v1 [math.dg] 16 Oct 2010
![arxiv: v1 [math.dg] 16 Oct 2010](/thumbs/88/117567102.jpg "arxiv: v1 [math.dg] 16 Oct 2010") THE BÄCKLUND TRANSFORM OF PRINCIPAL CONTACT ELEMENT NETS HANS-PETER SCHRÖCKER arxiv:1010.3339v1 [math.dg] 16 Oct 2010 Abstract. We investigate geometric aspects of the the Bäcklund transform of principal
THE BÄCKLUND TRANSFORM OF PRINCIPAL CONTACT ELEMENT NETS HANS-PETER SCHRÖCKER arxiv:1010.3339v1 [math.dg] 16 Oct 2010 Abstract. We investigate geometric aspects of the the Bäcklund transform of principal
Visualization of Wulff s crystals
 Visualization of Wulff s crystals Vesna Veličković and Eberhard Malkowsky, Faculty of Science and Mathematics, University of Niš, Serbia Department of Mathematics, Fatih University, Istanbul, Turkey Državni
Visualization of Wulff s crystals Vesna Veličković and Eberhard Malkowsky, Faculty of Science and Mathematics, University of Niš, Serbia Department of Mathematics, Fatih University, Istanbul, Turkey Državni
A unique representation of polyhedral types. Centering via Möbius transformations
 Mathematische Zeitschrift manuscript No. (will be inserted by the editor) A unique representation of polyhedral types. Centering via Möbius transformations Boris A. Springborn Boris Springborn Technische
Mathematische Zeitschrift manuscript No. (will be inserted by the editor) A unique representation of polyhedral types. Centering via Möbius transformations Boris A. Springborn Boris Springborn Technische
Synthetic Geometry. 1.4 Quotient Geometries
 Synthetic Geometry 1.4 Quotient Geometries Quotient Geometries Def: Let Q be a point of P. The rank 2 geometry P/Q whose "points" are the lines of P through Q and whose "lines" are the hyperplanes of of
Synthetic Geometry 1.4 Quotient Geometries Quotient Geometries Def: Let Q be a point of P. The rank 2 geometry P/Q whose "points" are the lines of P through Q and whose "lines" are the hyperplanes of of
LAMC Beginners Circle November 10, Oleg Gleizer. Warm-up
 LAMC Beginners Circle November 10, 2013 Oleg Gleizer oleg1140@gmail.com Warm-up Problem 1 Can a power of two (a number of the form 2 n ) have all the decimal digits 0, 1,..., 9 the same number of times?
LAMC Beginners Circle November 10, 2013 Oleg Gleizer oleg1140@gmail.com Warm-up Problem 1 Can a power of two (a number of the form 2 n ) have all the decimal digits 0, 1,..., 9 the same number of times?
Chapter 9. Conic Sections and Analytic Geometry. 9.2 The Hyperbola. Copyright 2014, 2010, 2007 Pearson Education, Inc.
 Chapter 9 Conic Sections and Analytic Geometry 9. The Hyperbola Copyright 014, 010, 007 Pearson Education, Inc. 1 Objectives: Locate a hyperbola s vertices and foci. Write equations of hyperbolas in standard
Chapter 9 Conic Sections and Analytic Geometry 9. The Hyperbola Copyright 014, 010, 007 Pearson Education, Inc. 1 Objectives: Locate a hyperbola s vertices and foci. Write equations of hyperbolas in standard
Common Core State Standards for Mathematics - High School
 to the Common Core State Standards for - High School I Table of Contents Number and Quantity... 1 Algebra... 1 Functions... 3 Geometry... 6 Statistics and Probability... 8 Copyright 2013 Pearson Education,
to the Common Core State Standards for - High School I Table of Contents Number and Quantity... 1 Algebra... 1 Functions... 3 Geometry... 6 Statistics and Probability... 8 Copyright 2013 Pearson Education,
Lecture 1: Systems of linear equations and their solutions
 Lecture 1: Systems of linear equations and their solutions Course overview Topics to be covered this semester: Systems of linear equations and Gaussian elimination: Solving linear equations and applications
Lecture 1: Systems of linear equations and their solutions Course overview Topics to be covered this semester: Systems of linear equations and Gaussian elimination: Solving linear equations and applications
 Torus A torus is a surface having Genus 1, and therefore possessing a single ``Hole.'' The usual torus in 3-D space is shaped like a donut, but the concept of the torus is extremely useful in higher dimensional
Torus A torus is a surface having Genus 1, and therefore possessing a single ``Hole.'' The usual torus in 3-D space is shaped like a donut, but the concept of the torus is extremely useful in higher dimensional
Classifying Four-Body Convex Central Configurations
 Classifying Four-Body Convex Central Configurations Gareth E. Roberts Department of Mathematics and Computer Science College of the Holy Cross Worcester, MA, USA Josep (Pitu) Cors (Universitat Politècnica
Classifying Four-Body Convex Central Configurations Gareth E. Roberts Department of Mathematics and Computer Science College of the Holy Cross Worcester, MA, USA Josep (Pitu) Cors (Universitat Politècnica
arxiv:dg-ga/ v1 9 Oct 1996
 BONNET PAIRS AND ISOTHERMIC SURFACES GEORGE KAMBEROV, FRANZ PEDIT, AND ULRICH PINKALL arxiv:dg-ga/9610006v1 9 Oct 1996 1. Introduction A classical question in surface theory is which data are sufficient
BONNET PAIRS AND ISOTHERMIC SURFACES GEORGE KAMBEROV, FRANZ PEDIT, AND ULRICH PINKALL arxiv:dg-ga/9610006v1 9 Oct 1996 1. Introduction A classical question in surface theory is which data are sufficient
Distance Formula in 3-D Given any two points P 1 (x 1, y 1, z 1 ) and P 2 (x 2, y 2, z 2 ) the distance between them is ( ) ( ) ( )
 and P 2 (x 2, y 2, z 2 ) the distance between them is ( ) ( ) ( )") Vectors and the Geometry of Space Vector Space The 3-D coordinate system (rectangular coordinates ) is the intersection of three perpendicular (orthogonal) lines called coordinate axis: x, y, and z. Their
Vectors and the Geometry of Space Vector Space The 3-D coordinate system (rectangular coordinates ) is the intersection of three perpendicular (orthogonal) lines called coordinate axis: x, y, and z. Their
Introduction to Vectors
 Introduction to Vectors K. Behrend January 31, 008 Abstract An introduction to vectors in R and R 3. Lines and planes in R 3. Linear dependence. 1 Contents Introduction 3 1 Vectors 4 1.1 Plane vectors...............................
Introduction to Vectors K. Behrend January 31, 008 Abstract An introduction to vectors in R and R 3. Lines and planes in R 3. Linear dependence. 1 Contents Introduction 3 1 Vectors 4 1.1 Plane vectors...............................
The Geometry of Root Systems. Brian C. Hall
 The Geometry of Root Systems A E Z S Brian C. Hall T G R S T G R S 1 1. I Root systems arise in the theory of Lie groups and Lie algebras, but can also be studied as mathematical objects in their own right.
The Geometry of Root Systems A E Z S Brian C. Hall T G R S T G R S 1 1. I Root systems arise in the theory of Lie groups and Lie algebras, but can also be studied as mathematical objects in their own right.
10.2,3,4. Vectors in 3D, Dot products and Cross Products
 Name: Section: 10.2,3,4. Vectors in 3D, Dot products and Cross Products 1. Sketch the plane parallel to the xy-plane through (2, 4, 2) 2. For the given vectors u and v, evaluate the following expressions.
Name: Section: 10.2,3,4. Vectors in 3D, Dot products and Cross Products 1. Sketch the plane parallel to the xy-plane through (2, 4, 2) 2. For the given vectors u and v, evaluate the following expressions.
OKLAHOMA SUBJECT AREA TESTS (OSAT )
") CERTIFICATION EXAMINATIONS FOR OKLAHOMA EDUCATORS (CEOE ) OKLAHOMA SUBJECT AREA TESTS (OSAT ) FIELD 125: MIDDLE LEVEL/INTERMEDIATE MATHEMATICS September 2016 Subarea Range of Competencies I. Number Properties
CERTIFICATION EXAMINATIONS FOR OKLAHOMA EDUCATORS (CEOE ) OKLAHOMA SUBJECT AREA TESTS (OSAT ) FIELD 125: MIDDLE LEVEL/INTERMEDIATE MATHEMATICS September 2016 Subarea Range of Competencies I. Number Properties
Saxon Calculus Scope and Sequence
 hmhco.com Saxon Calculus Scope and Sequence Foundations Real Numbers Identify the subsets of the real numbers Identify the order properties of the real numbers Identify the properties of the real number
hmhco.com Saxon Calculus Scope and Sequence Foundations Real Numbers Identify the subsets of the real numbers Identify the order properties of the real numbers Identify the properties of the real number
Classroom Tips and Techniques: Electric Field from Distributed Charge
 Classroom Tips and Techniques: Electric Field from Distributed Charge Introduction Robert J. Lopez Emeritus Professor of Mathematics and Maple Fellow Maplesoft This past summer I was asked if Maple could
Classroom Tips and Techniques: Electric Field from Distributed Charge Introduction Robert J. Lopez Emeritus Professor of Mathematics and Maple Fellow Maplesoft This past summer I was asked if Maple could
A Mathematical Trivium
 A Mathematical Trivium V.I. Arnold 1991 1. Sketch the graph of the derivative and the graph of the integral of a function given by a freehand graph. 2. Find the limit lim x 0 sin tan x tan sin x arcsin
A Mathematical Trivium V.I. Arnold 1991 1. Sketch the graph of the derivative and the graph of the integral of a function given by a freehand graph. 2. Find the limit lim x 0 sin tan x tan sin x arcsin
Thebault circles of the triangle in an isotropic plane
 MATHEMATICAL COMMUNICATIONS 437 Math. Commun., Vol. 5, No. 2, pp. 437-442 (200) Thebault circles of the triangle in an isotropic plane Ružica Kolar Šuper, Zdenka Kolar Begović 2, and Vladimir Volenec 3
MATHEMATICAL COMMUNICATIONS 437 Math. Commun., Vol. 5, No. 2, pp. 437-442 (200) Thebault circles of the triangle in an isotropic plane Ružica Kolar Šuper, Zdenka Kolar Begović 2, and Vladimir Volenec 3
Discrete Differential Geometry. Discrete Laplace-Beltrami operator and discrete conformal mappings.
 Discrete differential geometry. Discrete Laplace-Beltrami operator and discrete conformal mappings. Technische Universität Berlin Geometric Methods in Classical and Quantum Lattice Systems, Caputh, September
Discrete differential geometry. Discrete Laplace-Beltrami operator and discrete conformal mappings. Technische Universität Berlin Geometric Methods in Classical and Quantum Lattice Systems, Caputh, September
On the Volume Formula for Hyperbolic Tetrahedra
 Discrete Comput Geom :347 366 (999 Discrete & Computational Geometry 999 Springer-Verlag New York Inc. On the Volume Formula for Hyperbolic Tetrahedra Yunhi Cho and Hyuk Kim Department of Mathematics,
Discrete Comput Geom :347 366 (999 Discrete & Computational Geometry 999 Springer-Verlag New York Inc. On the Volume Formula for Hyperbolic Tetrahedra Yunhi Cho and Hyuk Kim Department of Mathematics,
Vectors Coordinate frames 2D implicit curves 2D parametric curves. Graphics 2008/2009, period 1. Lecture 2: vectors, curves, and surfaces
 Graphics 2008/2009, period 1 Lecture 2 Vectors, curves, and surfaces Computer graphics example: Pixar (source: http://www.pixar.com) Computer graphics example: Pixar (source: http://www.pixar.com) Computer
Graphics 2008/2009, period 1 Lecture 2 Vectors, curves, and surfaces Computer graphics example: Pixar (source: http://www.pixar.com) Computer graphics example: Pixar (source: http://www.pixar.com) Computer
Manifolds, Lie Groups, Lie Algebras, with Applications. Kurt W.A.J.H.Y. Reillag (alias Jean Gallier) CIS610, Spring 2005
 CIS610, Spring 2005") Manifolds, Lie Groups, Lie Algebras, with Applications Kurt W.A.J.H.Y. Reillag (alias Jean Gallier) CIS610, Spring 2005 1 Motivations and Goals 1. Motivations Observation: Often, the set of all objects
Manifolds, Lie Groups, Lie Algebras, with Applications Kurt W.A.J.H.Y. Reillag (alias Jean Gallier) CIS610, Spring 2005 1 Motivations and Goals 1. Motivations Observation: Often, the set of all objects
The Perron-Frobenius Theorem. Consider a non-zero linear operator B on R n that sends the non-negative orthant into itself.
 Consider a non-zero linear operator B on R n that sends the non-negative orthant into itself. Consider a non-zero linear operator B on R n that sends the non-negative orthant into itself. Let be the simplex
Consider a non-zero linear operator B on R n that sends the non-negative orthant into itself. Consider a non-zero linear operator B on R n that sends the non-negative orthant into itself. Let be the simplex
Theorem on altitudes and the Jacobi identity
 Theorem on altitudes and the Jacobi identity A. Zaslavskiy and M. Skopenkov Solutions. First let us give a table containing the answers to all the problems: Algebraic object Geometric sense A apointa a
Theorem on altitudes and the Jacobi identity A. Zaslavskiy and M. Skopenkov Solutions. First let us give a table containing the answers to all the problems: Algebraic object Geometric sense A apointa a
arxiv: v2 [math.mg] 18 Sep 2018
![arxiv: v2 [math.mg] 18 Sep 2018](/thumbs/89/100739133.jpg "arxiv: v2 [math.mg] 18 Sep 2018") Farthest points on flat surfaces arxiv:1807.03507v2 [math.mg] 18 Sep 2018 1 Introduction Joël Rouyer Costin Vîlcu September 19, 2018 This note is an elementary example of the reciprocal influence between
Farthest points on flat surfaces arxiv:1807.03507v2 [math.mg] 18 Sep 2018 1 Introduction Joël Rouyer Costin Vîlcu September 19, 2018 This note is an elementary example of the reciprocal influence between
This pre-publication material is for review purposes only. Any typographical or technical errors will be corrected prior to publication.
 This pre-publication material is for review purposes only. Any typographical or technical errors will be corrected prior to publication. Copyright Pearson Canada Inc. All rights reserved. Copyright Pearson
This pre-publication material is for review purposes only. Any typographical or technical errors will be corrected prior to publication. Copyright Pearson Canada Inc. All rights reserved. Copyright Pearson
Linear Analysis Lecture 5
 Linear Analysis Lecture 5 Inner Products and V Let dim V < with inner product,. Choose a basis B and let v, w V have coordinates in F n given by x 1. x n and y 1. y n, respectively. Let A F n n be the
Linear Analysis Lecture 5 Inner Products and V Let dim V < with inner product,. Choose a basis B and let v, w V have coordinates in F n given by x 1. x n and y 1. y n, respectively. Let A F n n be the
Lecture Notes Introduction to Cluster Algebra
 Lecture Notes Introduction to Cluster Algebra Ivan C.H. Ip Update: July 11, 2017 11 Cluster Algebra from Surfaces In this lecture, we will define and give a quick overview of some properties of cluster
Lecture Notes Introduction to Cluster Algebra Ivan C.H. Ip Update: July 11, 2017 11 Cluster Algebra from Surfaces In this lecture, we will define and give a quick overview of some properties of cluster
Detailed objectives are given in each of the sections listed below. 1. Cartesian Space Coordinates. 2. Displacements, Forces, Velocities and Vectors
 Unit 1 Vectors In this unit, we introduce vectors, vector operations, and equations of lines and planes. Note: Unit 1 is based on Chapter 12 of the textbook, Salas and Hille s Calculus: Several Variables,
Unit 1 Vectors In this unit, we introduce vectors, vector operations, and equations of lines and planes. Note: Unit 1 is based on Chapter 12 of the textbook, Salas and Hille s Calculus: Several Variables,
Vectors, dot product, and cross product
 MTH 201 Multivariable calculus and differential equations Practice problems Vectors, dot product, and cross product 1. Find the component form and length of vector P Q with the following initial point
MTH 201 Multivariable calculus and differential equations Practice problems Vectors, dot product, and cross product 1. Find the component form and length of vector P Q with the following initial point
arxiv: v2 [math-ph] 24 Feb 2016
![arxiv: v2 [math-ph] 24 Feb 2016](/thumbs/92/109109824.jpg "arxiv: v2 [math-ph] 24 Feb 2016") ON THE CLASSIFICATION OF MULTIDIMENSIONALLY CONSISTENT 3D MAPS MATTEO PETRERA AND YURI B. SURIS Institut für Mathemat MA 7-2 Technische Universität Berlin Str. des 17. Juni 136 10623 Berlin Germany arxiv:1509.03129v2
ON THE CLASSIFICATION OF MULTIDIMENSIONALLY CONSISTENT 3D MAPS MATTEO PETRERA AND YURI B. SURIS Institut für Mathemat MA 7-2 Technische Universität Berlin Str. des 17. Juni 136 10623 Berlin Germany arxiv:1509.03129v2
Results on Planar Parallel Manipulators with Cylindrical Singularity Surface
 Results on Planar Parallel Manipulators with Cylindrical Singularity Surface Georg Nawratil Institute of Discrete Mathematics and Geometry Differential Geometry and Geometric Structures 11th International
Results on Planar Parallel Manipulators with Cylindrical Singularity Surface Georg Nawratil Institute of Discrete Mathematics and Geometry Differential Geometry and Geometric Structures 11th International
A geometric interpretation of the homogeneous coordinates is given in the following Figure.
 Introduction Homogeneous coordinates are an augmented representation of points and lines in R n spaces, embedding them in R n+1, hence using n + 1 parameters. This representation is useful in dealing with
Introduction Homogeneous coordinates are an augmented representation of points and lines in R n spaces, embedding them in R n+1, hence using n + 1 parameters. This representation is useful in dealing with
MATH H53 : Mid-Term-1
 MATH H53 : Mid-Term-1 22nd September, 215 Name: You have 8 minutes to answer the questions. Use of calculators or study materials including textbooks, notes etc. is not permitted. Answer the questions
MATH H53 : Mid-Term-1 22nd September, 215 Name: You have 8 minutes to answer the questions. Use of calculators or study materials including textbooks, notes etc. is not permitted. Answer the questions
12.5 Equations of Lines and Planes
 12.5 Equations of Lines and Planes Equation of Lines Vector Equation of Lines Parametric Equation of Lines Symmetric Equation of Lines Relation Between Two Lines Equations of Planes Vector Equation of
12.5 Equations of Lines and Planes Equation of Lines Vector Equation of Lines Parametric Equation of Lines Symmetric Equation of Lines Relation Between Two Lines Equations of Planes Vector Equation of
Linear Algebra and Dirac Notation, Pt. 1
 Linear Algebra and Dirac Notation, Pt. 1 PHYS 500 - Southern Illinois University February 1, 2017 PHYS 500 - Southern Illinois University Linear Algebra and Dirac Notation, Pt. 1 February 1, 2017 1 / 13
Linear Algebra and Dirac Notation, Pt. 1 PHYS 500 - Southern Illinois University February 1, 2017 PHYS 500 - Southern Illinois University Linear Algebra and Dirac Notation, Pt. 1 February 1, 2017 1 / 13
Name: ID: Math 233 Exam 1. Page 1
 Page 1 Name: ID: This exam has 20 multiple choice questions, worth 5 points each. You are allowed to use a scientific calculator and a 3 5 inch note card. 1. Which of the following pairs of vectors are
Page 1 Name: ID: This exam has 20 multiple choice questions, worth 5 points each. You are allowed to use a scientific calculator and a 3 5 inch note card. 1. Which of the following pairs of vectors are
Variable separation and second order superintegrability
 Variable separation and second order superintegrability Willard Miller (Joint with E.G.Kalnins) miller@ima.umn.edu University of Minnesota IMA Talk p.1/59 Abstract In this talk we shall first describe
Variable separation and second order superintegrability Willard Miller (Joint with E.G.Kalnins) miller@ima.umn.edu University of Minnesota IMA Talk p.1/59 Abstract In this talk we shall first describe
D.H. HAMILTON: THE RIEMANN MAPPING THEOREM FOR R 3
 D.H. HAMILTON: THE RIEMANN MAPPING THEOREM FOR R 3 University of Maryland 2007 1 Nice to be back at SUNY. I was here 10 years ago when I had some very preliminary results to talk about 1. There was an
D.H. HAMILTON: THE RIEMANN MAPPING THEOREM FOR R 3 University of Maryland 2007 1 Nice to be back at SUNY. I was here 10 years ago when I had some very preliminary results to talk about 1. There was an
VECTORS AND THE GEOMETRY OF SPACE
 VECTORS AND THE GEOMETRY OF SPACE VECTORS AND THE GEOMETRY OF SPACE A line in the xy-plane is determined when a point on the line and the direction of the line (its slope or angle of inclination) are given.
VECTORS AND THE GEOMETRY OF SPACE VECTORS AND THE GEOMETRY OF SPACE A line in the xy-plane is determined when a point on the line and the direction of the line (its slope or angle of inclination) are given.
Classical differential geometry of two-dimensional surfaces
 Classical differential geometry of two-dimensional surfaces 1 Basic definitions This section gives an overview of the basic notions of differential geometry for twodimensional surfaces. It follows mainly
Classical differential geometry of two-dimensional surfaces 1 Basic definitions This section gives an overview of the basic notions of differential geometry for twodimensional surfaces. It follows mainly
arxiv: v1 [math.gr] 8 Nov 2008
![arxiv: v1 [math.gr] 8 Nov 2008](/thumbs/79/80291227.jpg "arxiv: v1 [math.gr] 8 Nov 2008") SUBSPACES OF 7 7 SKEW-SYMMETRIC MATRICES RELATED TO THE GROUP G 2 arxiv:0811.1298v1 [math.gr] 8 Nov 2008 ROD GOW Abstract. Let K be a field of characteristic different from 2 and let C be an octonion algebra
SUBSPACES OF 7 7 SKEW-SYMMETRIC MATRICES RELATED TO THE GROUP G 2 arxiv:0811.1298v1 [math.gr] 8 Nov 2008 ROD GOW Abstract. Let K be a field of characteristic different from 2 and let C be an octonion algebra
Curriculum Catalog
 2017-2018 Curriculum Catalog 2017 Glynlyon, Inc. Table of Contents INTEGRATED MATH I COURSE OVERVIEW... 1 UNIT 1: FOUNDATIONS OF ALGEBRA... 1 UNIT 2: THE LANGUAGE OF ALGEBRA... 2 UNIT 3: GEOMETRY... 2
2017-2018 Curriculum Catalog 2017 Glynlyon, Inc. Table of Contents INTEGRATED MATH I COURSE OVERVIEW... 1 UNIT 1: FOUNDATIONS OF ALGEBRA... 1 UNIT 2: THE LANGUAGE OF ALGEBRA... 2 UNIT 3: GEOMETRY... 2
On the classification of isoparametric hypersurfaces with four distinct principal curvatures in spheres
 Annals of Mathematics, 168 (2008), 1011 1024 On the classification of isoparametric hypersurfaces with four distinct principal curvatures in spheres By Stefan Immervoll Abstract In this paper we give a
Annals of Mathematics, 168 (2008), 1011 1024 On the classification of isoparametric hypersurfaces with four distinct principal curvatures in spheres By Stefan Immervoll Abstract In this paper we give a
Convex bodies with many elliptic sections
 Convex bodies with many elliptic sections arxiv:1408.5647v1 [math.mg] 25 Aug 2014 Isaac Arelio Luis Montejano Abstract We show in this paper that two normal elliptic sections through every point of the
Convex bodies with many elliptic sections arxiv:1408.5647v1 [math.mg] 25 Aug 2014 Isaac Arelio Luis Montejano Abstract We show in this paper that two normal elliptic sections through every point of the
Warm Up Lesson Presentation Lesson Quiz. Holt McDougal Geometry
 2-4 Warm Up Lesson Presentation Lesson Quiz Geometry Warm Up Write a conditional statement from each of the following. 1. The intersection of two lines is a point. If two lines intersect, then they intersect
2-4 Warm Up Lesson Presentation Lesson Quiz Geometry Warm Up Write a conditional statement from each of the following. 1. The intersection of two lines is a point. If two lines intersect, then they intersect
Integration. Copyright Cengage Learning. All rights reserved.
 4 Integration Copyright Cengage Learning. All rights reserved. 1 4.3 Riemann Sums and Definite Integrals Copyright Cengage Learning. All rights reserved. 2 Objectives Understand the definition of a Riemann
4 Integration Copyright Cengage Learning. All rights reserved. 1 4.3 Riemann Sums and Definite Integrals Copyright Cengage Learning. All rights reserved. 2 Objectives Understand the definition of a Riemann
5.2 The Levi-Civita Connection on Surfaces. 1 Parallel transport of vector fields on a surface M
 5.2 The Levi-Civita Connection on Surfaces In this section, we define the parallel transport of vector fields on a surface M, and then we introduce the concept of the Levi-Civita connection, which is also
5.2 The Levi-Civita Connection on Surfaces In this section, we define the parallel transport of vector fields on a surface M, and then we introduce the concept of the Levi-Civita connection, which is also
Example 2 (new version): the generators are. Example 4: the generators are
: the generators are. Example 4: the generators are") First, let us quickly dismiss Example 3 (and Example 6): the second generator may be removed (being the square of the third or, respectively, the fourth one), and then the quotient is clearly the simplest
First, let us quickly dismiss Example 3 (and Example 6): the second generator may be removed (being the square of the third or, respectively, the fourth one), and then the quotient is clearly the simplest
2.2 Analyze Conditional
 2.2 Analyze Conditional Statements Goal p Write definitions as conditional statements. Your Notes VOCABULARY Conditional statement If-then form Hypothesis Conclusion Negation Converse Inverse Contrapositive
2.2 Analyze Conditional Statements Goal p Write definitions as conditional statements. Your Notes VOCABULARY Conditional statement If-then form Hypothesis Conclusion Negation Converse Inverse Contrapositive
NOTE. Progress in the No-Three-in-Line Problem, II
 Journal of Combinatorial Theory, Series A 81, 108113 (1998) Article No. TA972829 NOTE Progress in the No-Three-in-Line Problem, II Achim Flammenkamp* Fakulta t fu r Mathematik, Universita t Bielefield,
Journal of Combinatorial Theory, Series A 81, 108113 (1998) Article No. TA972829 NOTE Progress in the No-Three-in-Line Problem, II Achim Flammenkamp* Fakulta t fu r Mathematik, Universita t Bielefield,
Laplace-Beltrami Eigenfunctions for Deformation Invariant Shape Representation
 Laplace-Beltrami Eigenfunctions for Deformation Invariant Shape Representation Author: Raif M. Rustamov Presenter: Dan Abretske Johns Hopkins 2007 Outline Motivation and Background Laplace-Beltrami Operator
Laplace-Beltrami Eigenfunctions for Deformation Invariant Shape Representation Author: Raif M. Rustamov Presenter: Dan Abretske Johns Hopkins 2007 Outline Motivation and Background Laplace-Beltrami Operator
Definitions, Axioms, Postulates, Propositions, and Theorems from Euclidean and Non-Euclidean Geometries by Marvin Jay Greenberg
 Definitions, Axioms, Postulates, Propositions, and Theorems from Euclidean and Non-Euclidean Geometries by Marvin Jay Greenberg Undefined Terms: Point, Line, Incident, Between, Congruent. Incidence Axioms:
Definitions, Axioms, Postulates, Propositions, and Theorems from Euclidean and Non-Euclidean Geometries by Marvin Jay Greenberg Undefined Terms: Point, Line, Incident, Between, Congruent. Incidence Axioms:
CN#4 Biconditional Statements and Definitions
 CN#4 s and Definitions OBJECTIVES: STUDENTS WILL BE ABLE TO WRITE AND ANALYZE BICONDITIONAL STATEMENTS. Vocabulary biconditional statement definition polygon triangle quadrilateral When you combine a conditional
CN#4 s and Definitions OBJECTIVES: STUDENTS WILL BE ABLE TO WRITE AND ANALYZE BICONDITIONAL STATEMENTS. Vocabulary biconditional statement definition polygon triangle quadrilateral When you combine a conditional
Homogeneous Coordinates
 Homogeneous Coordinates Basilio Bona DAUIN-Politecnico di Torino October 2013 Basilio Bona (DAUIN-Politecnico di Torino) Homogeneous Coordinates October 2013 1 / 32 Introduction Homogeneous coordinates
Homogeneous Coordinates Basilio Bona DAUIN-Politecnico di Torino October 2013 Basilio Bona (DAUIN-Politecnico di Torino) Homogeneous Coordinates October 2013 1 / 32 Introduction Homogeneous coordinates
MATH 215 Sets (S) Definition 1 A set is a collection of objects. The objects in a set X are called elements of X.
 Definition 1 A set is a collection of objects. The objects in a set X are called elements of X.") MATH 215 Sets (S) Definition 1 A set is a collection of objects. The objects in a set X are called elements of X. Notation 2 A set can be described using set-builder notation. That is, a set can be described
MATH 215 Sets (S) Definition 1 A set is a collection of objects. The objects in a set X are called elements of X. Notation 2 A set can be described using set-builder notation. That is, a set can be described
Topology Homework Assignment 1 Solutions
 Topology Homework Assignment 1 Solutions 1. Prove that R n with the usual topology satisfies the axioms for a topological space. Let U denote the usual topology on R n. 1(a) R n U because if x R n, then
Topology Homework Assignment 1 Solutions 1. Prove that R n with the usual topology satisfies the axioms for a topological space. Let U denote the usual topology on R n. 1(a) R n U because if x R n, then
Senior Math Circles February 18, 2009 Conics III
 University of Waterloo Faculty of Mathematics Senior Math Circles February 18, 2009 Conics III Centre for Education in Mathematics and Computing Eccentricity of Conics Fix a point F called the focus, a
University of Waterloo Faculty of Mathematics Senior Math Circles February 18, 2009 Conics III Centre for Education in Mathematics and Computing Eccentricity of Conics Fix a point F called the focus, a
Helicoidal Surfaces and Their Relationship to Bonnet Surfaces
 Advances in Pure Mathematics, 07, 7, -40 http://wwwscirporg/journal/apm ISSN Online: 60-084 ISSN Print: 60-068 Helicoidal Surfaces and Their Relationship to Bonnet Surfaces Paul Bracken Department of Mathematics,
Advances in Pure Mathematics, 07, 7, -40 http://wwwscirporg/journal/apm ISSN Online: 60-084 ISSN Print: 60-068 Helicoidal Surfaces and Their Relationship to Bonnet Surfaces Paul Bracken Department of Mathematics,
SOLVING ALHAZEN S PROBLEM BY ORIGAMI
 INTERNATIONAL JOURNAL OF GEOMETRY Vol. 7 (2018), No. 2, 37-42 SOLVING ALHAZEN S PROBLEM BY ORIGAMI YASUZO NISHIMURA Abstract. In this paper we give a procedure of the geometric construction for Alhazen
INTERNATIONAL JOURNAL OF GEOMETRY Vol. 7 (2018), No. 2, 37-42 SOLVING ALHAZEN S PROBLEM BY ORIGAMI YASUZO NISHIMURA Abstract. In this paper we give a procedure of the geometric construction for Alhazen
Lecture 14 Conformal Mapping. 1 Conformality. 1.1 Preservation of angle. 1.2 Length and area. MATH-GA Complex Variables
 Lecture 14 Conformal Mapping MATH-GA 2451.001 Complex Variables 1 Conformality 1.1 Preservation of angle The open mapping theorem tells us that an analytic function such that f (z 0 ) 0 maps a small neighborhood
Lecture 14 Conformal Mapping MATH-GA 2451.001 Complex Variables 1 Conformality 1.1 Preservation of angle The open mapping theorem tells us that an analytic function such that f (z 0 ) 0 maps a small neighborhood
Harbor Creek School District
 Unit 1 Days 1-9 Evaluate one-sided two-sided limits, given the graph of a function. Limits, Evaluate limits using tables calculators. Continuity Evaluate limits using direct substitution. Differentiability
Unit 1 Days 1-9 Evaluate one-sided two-sided limits, given the graph of a function. Limits, Evaluate limits using tables calculators. Continuity Evaluate limits using direct substitution. Differentiability
Critical Sets of 2-Dimensional Compact Manifolds
 Critical Sets of 2-Dimensional Compact Manifolds Liana Ţopan Dedicated to the Memory of Grigorios TSAGAS (1935-2003), President of Balkan Society of Geometers (1997-2003) Abstract In this paper we characterize
Critical Sets of 2-Dimensional Compact Manifolds Liana Ţopan Dedicated to the Memory of Grigorios TSAGAS (1935-2003), President of Balkan Society of Geometers (1997-2003) Abstract In this paper we characterize
Methods in Mathematics (Linked Pair Pilot)
") Centre Number Surname Candidate Number For Examiner s Use Other Names Candidate Signature Examiner s Initials General Certificate of Secondary Education Higher Tier January 2013 Pages 3 4 5 Mark Methods
Centre Number Surname Candidate Number For Examiner s Use Other Names Candidate Signature Examiner s Initials General Certificate of Secondary Education Higher Tier January 2013 Pages 3 4 5 Mark Methods
Some Bounds for the Distribution Numbers of an Association Scheme
 Europ. J. Combinatorics (1988) 9, 1-5 Some Bounds for the Distribution Numbers of an Association Scheme THOMAS BIER AND PHILIPPE DELSARTE We generalize the definition of distribution numbers of an association
Europ. J. Combinatorics (1988) 9, 1-5 Some Bounds for the Distribution Numbers of an Association Scheme THOMAS BIER AND PHILIPPE DELSARTE We generalize the definition of distribution numbers of an association
Necessary conditions for type II DM self-motions of planar Stewart Gough platforms
 Journal for Geometry and Graphics Volume VOL (YEAR), No. NO, 1 12. Necessary conditions for type II DM self-motions of planar Stewart Gough platforms Georg Nawratil Institute of Discrete Mathematics and
Journal for Geometry and Graphics Volume VOL (YEAR), No. NO, 1 12. Necessary conditions for type II DM self-motions of planar Stewart Gough platforms Georg Nawratil Institute of Discrete Mathematics and
CURRICULUM CATALOG MATHEMATICS 1 (21032X0) NC
 NC") 2018-19 CURRICULUM CATALOG MATHEMATICS 1 (21032X0) NC Table of Contents MATHEMATICS 1 (21032X0) NC COURSE OVERVIEW... 1 UNIT 1: FOUNDATIONS OF ALGEBRA... 1 UNIT 2: EQUATIONS AND INEQUALITIES... 1 UNIT
2018-19 CURRICULUM CATALOG MATHEMATICS 1 (21032X0) NC Table of Contents MATHEMATICS 1 (21032X0) NC COURSE OVERVIEW... 1 UNIT 1: FOUNDATIONS OF ALGEBRA... 1 UNIT 2: EQUATIONS AND INEQUALITIES... 1 UNIT
Topology, Math 581, Fall 2017 last updated: November 24, Topology 1, Math 581, Fall 2017: Notes and homework Krzysztof Chris Ciesielski
 Topology, Math 581, Fall 2017 last updated: November 24, 2017 1 Topology 1, Math 581, Fall 2017: Notes and homework Krzysztof Chris Ciesielski Class of August 17: Course and syllabus overview. Topology
Topology, Math 581, Fall 2017 last updated: November 24, 2017 1 Topology 1, Math 581, Fall 2017: Notes and homework Krzysztof Chris Ciesielski Class of August 17: Course and syllabus overview. Topology
Linear Algebra I for Science (NYC)
") Element No. 1: To express concrete problems as linear equations. To solve systems of linear equations using matrices. Topic: MATRICES 1.1 Give the definition of a matrix, identify the elements and the
Element No. 1: To express concrete problems as linear equations. To solve systems of linear equations using matrices. Topic: MATRICES 1.1 Give the definition of a matrix, identify the elements and the