Co-evolution of Morphology and Control for Roombots
|
|
|
- Laura Hodge
- 5 years ago
- Views:
Transcription
1 Co-evolution of Morphology and Control for Roombots Master Thesis Presentation Ebru Aydın Advisors: Prof. Auke Jan Ijspeert Rico Möckel Jesse van den Kieboom Soha Pouya Alexander Spröwitz
2 Co-evolution General Approach : Hardware, Software Body - brain evolution Building Blocks sticks, actuated joints, artificial neurons Encodings direct, direct recurrent, cellular, generative
3 Developmental (Generative) Encoding The algorithm to build the robot Biologically inspired Reuse of components Self-similar structures Compact representation L-system grammars, tree based
 Competing (b) Swimming (c) Phenotype and genotype Neural network for")

4 Previous work: Karl Sims Sims 1994, Evolving 3D Morphology and Behavior (a) Competing (b) Swimming (c) Phenotype and genotype Neural network for controller Tree based encoding for morphology, self similar structures, code reuse A variety of locomotion styles and behavior strategies are evolved




5 Previous work: Demo Lab Projects from Demo Lab : Hornby, Pollack, Lipson Generative Representations for Design Automation Static structures, 2D and 3D robots are evolved. The Golem Project

6 Previous work: Demo Lab Generative encoding builds creatures with better locomotion ability then non-generative encoding Generative encoding brings: Scalability through self-similar structures Hierarchical structure Compact representation
 MTRAN (l)")

7 Modular robots (k) MTRAN (l) Superbot (m) YAMOR Detach-attach Self-configuration Adaptation

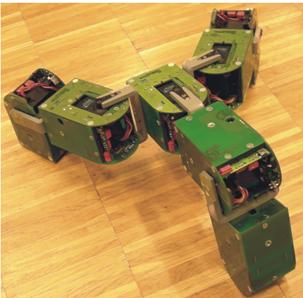
8 Introduction Evolving Robots Roombots Self-reconfigurable Self sufficient Uniform 220mm 110mm 110mm, 1.4kg ACM 3 DOF - Continious rotation Experiments

9 Roombots Self-reconfigurable Self sufficient Uniform 220mm 110mm 110mm, 1.4kg ACM 3 DOF - Continious rotation
10 Co-evolution for the Roombots Modular robots can assemble into many different structures Developmental encoding : Self-similarity, compactness, modularity Co-evolution for Roombots Morphological Building Blocks: Roombots and Passive elements Controller : Coupled Phase Oscillators Encoding (L-systems), combine morphology and controller
11 L-systems Re-write systems Growth process of the organisms Formal grammars G = (V, w, P ) w V + P V V
12 Examples V = {a, b} w = a P = a ab, b a Starting from axiom, a, the following sequence is generated. Step0 : a Step1 : ab Step2 : aba Step3 : abaab
13 Examples Turtle Rules V = {F, +, } w = F F F P = F F + F F + F
14 Examples Branching L-systems [ ] V = {F, +,, [, ]} w = F P = F F [+F ]F [ F [+F ][ F ]]F
15 L-system for the Roombots Deterministic branching L-systems An L-system a robot Additive turtle like interpretation Constants Build commands Build commands : 1. Add a new part 2. Modify an open parameter
16 Controller CPG, rhythmic patterned output Limit cycle behavior robust Parameterize S1 S1 servo motor oscillator M1 M1 S2 S2
17 Controller φ i = 2 π ν + ω ij r j sin (φ j φ i ψ ij ) ṙ i = a(r i r i ) ẋ i = b(x i x i ) Fixed parameters : ν, ω ij, a, b Open parameters : R i, ψ ij, X i
18 Controller φ i = 2 π ν + ω ij r j sin (φ j φ i ψ ij ) ṙ i = a(r i r i ) ẋ i = b(x i x i ) Fixed parameters : ν, ω ij, a, b Open parameters : R i, ψ ij, X i Drive functions: θ i = r i sin (φ i ) + x i θ i = ±φ i θ i = x i Oscillation Rotation Locked


19 Morphology Roombots modules Connection face Connection type Phase offset Passive elements, spring-damper systems Connection face Length
20 State State : Module, Connection face, Phase bias State update commands: ADD CONNECTION TYPE, CONNECTION FACE CHANGE FACE N CHANGE PHASE BIAS BM N
21 State State : Module, Connection face, Phase bias State update commands: ADD CONNECTION TYPE, CONNECTION FACE CHANGE FACE N CHANGE PHASE BIAS BM N CHANGE VALUE N command is interpreted as: VALUE VALUE + N (mod S) ACT IV E F ACE ACT IV E F ACE + N (mod4)
22 Build Commands: BRANCH OPERATOR : [ ] REPETITION OPERATOR : { } N ADD CONNECTION TYPE, CONNECTION FACE ADD PASSIVE LEG: LENGTH Modify Control Parameters: CHANGE AMPLITUDE OSC N CHANGE OFFSET OSC N CHANGE DRIVE FUNCTION OSC N CHANGE PHASE BIAS COUPLING N
23 L-system Grammars Deterministic, context-free, branching Four rules Non-recursive The grammar encodes the build process of the robot Table: Build Commands Abbreviations Command Abbreviation ADD ADD CHANGE FACE CF CHANGE PHASE BIAS BM CPBBM CHANGE PHASE BIAS CPB CHANGE AMPLITUDE CA CHANGE OFFSET CO CHANGE DRIVE FUNCTION CDF
24 An example grammar R1 CPB(s1::m1 90) CA(m1 1.4) CO(s2 150) CPB(m1::s2 220) CO(m1 290) R2 ADD(C1Y PER) CDF(s1 3) CDF(s2 3) R1 CA(s2 1.4) R3 CPB(s1::m1 100) R2 CA(m1 2.5) 1 x { CA(m1 2.4) } R4 CDF(m1 2) CO(s2 340) CPBBM(100) R2 R2 R3 CF(2)
25 step0 : R4 Rewrite steps
26 Rewrite steps step0 : R4 step1 : CDF(m1 2) CO(s2 340) CPBBM(100) R2 R2 R3 CF(2)
27 Rewrite steps step0 : R4 step1 : CDF(m1 2) CO(s2 340) CPBBM(100) R2 R2 R3 CF(2) step2 : CDF(m1 2) CO(s2 340) CPBBM(100) ADD(C1Y PER) CDF(s1 3) CDF(s2 3) R1 CA(s2 1.4) ADD(C1Y PER) CDF(s1 3) CDF(s2 3) R1 CA(s2 1.4) CPB(s1::m1 100) R2 CA(m1 2.5) 1 x { CA(m1 2.4) } CF(2)
28 Rewrite steps step0 : R4 step1 : CDF(m1 2) CO(s2 340) CPBBM(100) R2 R2 R3 CF(2) step2 : CDF(m1 2) CO(s2 340) CPBBM(100) ADD(C1Y PER) CDF(s1 3) CDF(s2 3) R1 CA(s2 1.4) ADD(C1Y PER) CDF(s1 3) CDF(s2 3) R1 CA(s2 1.4) CPB(s1::m1 100) R2 CA(m1 2.5) 1 x { CA(m1 2.4) } CF(2) step3 : CDF(m1 2) CO(s2 340) CPBBM(100) ADD(C1Y PER) CDF(s1 3) CDF(s2 3) CPB(s1::m1 90) CA(m1 1.4) CO(s2 150) CPB(m1::s2 220) CO(m1 290) CA(s2 1.4) ADD(C1Y PER) CDF(s1 3) CDF(s2 3) CPB(s1::m1 90) CA(m1 1.4) CO(s2 150) CPB(m1::s2 220) CO(m1 290) CA(s2 1.4) CPB(s1::m1 100) ADD(C1Y PER) CDF(s1 3) CDF(s2 3) R1 CA(s2 1.4) CA(m1 2.5) 1 x { CA(m1 2.4) } CF(2)
29 Rewrite Steps step4 : CDF(m1 2) CO(s2 340) CPBBM(100) ADD(C1Y PER) CDF(s1 3) CDF(s2 3) CPB(s1::m1 90) CA(m1 1.4) CO(s2 150) CPB(m1::s2 220) CO(m1 290) CA(s2 1.4) ADD(C1Y PER) CDF(s1 3) CDF(s2 3) CPB(s1::m1 90) CA(m1 1.4) CO(s2 150) CPB(m1::s2 220) CO(m1 290) CA(s2 1.4) CPB(s1::m1 100) ADD(C1Y PER) CDF(s1 3) CDF(s2 3) CPB(s1::m1 90) CA(m1 1.4) CO(s2 150) CPB(m1::s2 220) CO(m1 290) CA(s2 1.4) CA(m1 2.5) 1 x { CA(m1 2.4) } CF(2)
 Rotation ( φ i ) CO(s2 340) CPBBM(100) Update state")
30 Interpretation of the string CDF(m1 2) CO(s2 340) CPBBM(100)... CDF(m1 2) Rotation ( φ i ) CO(s2 340) CPBBM(100) Update state
 CDF(s1 3) CDF(s2 3) CPB(s1::m1 90) CA(m1 1.")
31 Interpretation of the string... ADD(C1Y PER) CDF(s1 3) CDF(s2 3) CPB(s1::m1 90) CA(m1 1.4) CO(s2 150) CPB(m1::s2 220) CO(m1 290) CA(s2 1.4)...
 CDF(s1 3) CDF(s2 3) CPB(s1::m1 90) CA(m1 1.")
32 Interpretation of the string... ADD(C1Y PER) CDF(s1 3) CDF(s2 3) CPB(s1::m1 90) CA(m1 1.4) CO(s2 150) CPB(m1::s2 220) CO(m1 290) CA(s2 1.4) CPB(s1::m1 100)...
 CDF(s1 3) CDF(s2 3) CPB(s1::m1 90) CA(m1 1.")
33 Interpretation of the string... ADD(C1Y PER) CDF(s1 3) CDF(s2 3) CPB(s1::m1 90) CA(m1 1.4) CO(s2 150) CPB(m1::s2 220) CO(m1 290) CA(s2 1.4) CA(m1 2.5) CA(m1 2.4)
34 Evolutionary Algorithm The L-system grammars are evolved. a- Mutation Change parameter of a build command Add rule to rewrite rule Remove rule from rewrite rule b- Crossover : Use an index, copy the rules from parents: r1 r2 r3 r4
35 Evolutionary Algorithm c- Selection : Roulette wheel fitness = Evaluation in simulation Straight line motion Positive change of the impact, safe Energy efficiency speed a impact b torque c
36 Implementation Optimizer Grammar World builder cpg.xml Parser world.xml World maker Fitness Simulator world.wbt
37 Experiments Two sets of experiments Roombots Roombots and passive legs Generation limit 500 th Modules : 2 to 8 Deterministic simulation environment Distributed over 40 computers 3 to 5 hours

38 An example Run
39 An example Run Best fitness changed at 7 points between 20 th and 50 th generations speed (m/s) impact x 10 4 torque (Nm) 7 6 fitness
40 An example Run speed (m/s) impact x 10 4 torque (Nm) 7 6 fitness rd - Mutation (parameter modification), best of the previous generation
41 An example Run speed (m/s) impact x 10 4 torque (Nm) 7 6 fitness th - Crossover of two average individual
42 An example Run speed (m/s) impact x 10 4 torque (Nm) 7 6 fitness th - Crossover, same morphologies but different controllers
43 Evaluation of the results Many different locomotion strategies are evolved Videos...
44 Roombots and Passive Elements Experiments Two types Between modules (2 connection faces) Attached to one module (1 connection face) (*) Telescopic motion Spring-damper systems Modules : 2 to 4 Passive Legs : 2 to 6 The aim is to explore effects of the passive compliant elements on the fitness criteria Videos...

45 Figure: The average speeds and fitness values according to number of modules of the robots. Comparison of the results (p) (q)

46 Figure: The average impact and torque values according to number of modules of the robots. Comparison of the results (a) (b)
47 Passive Elements Between Modules Rotational and linear Unstable behavior Unrealistic speeds (up to 2m/s) Robots disconnected Fast turn, gyroscope threshold did not work Reason could not be found ACM very stiff, each module is a robot A better model is needed
48 Conclusion Developmental process to evolve the morphology and controllers of the modular robots L-system grammars encoded the build process are evolved A variety of robots with different locomotion strategies are evolved The passive legs enable faster gaits by exploiting the energy stored at the legs The system can be used to test other types of passive elements The fitness criteria can be adapted for other tasks
49 Future Work Sensory feedback Other tasks Unstable passive elements
50 Thank you for listening! Questions...
51 6% 6% 13% 2 modules 3 modules 4 modules 5 modules 7 modules 19% 56% Evaluation of the results Robot Count Number of Modules Distribution of the results according to the number of modules of the fittest robot. The robot counts according to their modules in the initial population. Each generation is composed of 100 individuals
52 0.45 Evaluation of the results 3.5 x Average speed (m/s) Average Fitness Number of Modules Number of Modules Figure: These results are grouped by the number of the modules of the robot.
Evolutionary Robotics
 Evolutionary Robotics Previously on evolutionary robotics Evolving Neural Networks How do we evolve a neural network? Evolving Neural Networks How do we evolve a neural network? One option: evolve the
Evolutionary Robotics Previously on evolutionary robotics Evolving Neural Networks How do we evolve a neural network? Evolving Neural Networks How do we evolve a neural network? One option: evolve the
Co-evolution of Structures and Controllers for Neubot Underwater Modular Robots
 Co-evolution of Structures and Controllers for Neubot Underwater Modular Robots Barthélémy von Haller 1, Auke Ijspeert 1, and Dario Floreano 2 1 Biologically Inspired Robotics Group 2 Laboratory of Intelligent
Co-evolution of Structures and Controllers for Neubot Underwater Modular Robots Barthélémy von Haller 1, Auke Ijspeert 1, and Dario Floreano 2 1 Biologically Inspired Robotics Group 2 Laboratory of Intelligent
COMP3411: Artificial Intelligence 7a. Evolutionary Computation
 COMP3411 14s1 Evolutionary Computation 1 COMP3411: Artificial Intelligence 7a. Evolutionary Computation Outline Darwinian Evolution Evolutionary Computation paradigms Simulated Hockey Evolutionary Robotics
COMP3411 14s1 Evolutionary Computation 1 COMP3411: Artificial Intelligence 7a. Evolutionary Computation Outline Darwinian Evolution Evolutionary Computation paradigms Simulated Hockey Evolutionary Robotics
Enhancing a Model-Free Adaptive Controller through Evolutionary Computation
 Enhancing a Model-Free Adaptive Controller through Evolutionary Computation Anthony Clark, Philip McKinley, and Xiaobo Tan Michigan State University, East Lansing, USA Aquatic Robots Practical uses autonomous
Enhancing a Model-Free Adaptive Controller through Evolutionary Computation Anthony Clark, Philip McKinley, and Xiaobo Tan Michigan State University, East Lansing, USA Aquatic Robots Practical uses autonomous
Artificial Metamorphosis: Evolutionary Design of Transforming, Soft-Bodied Robots
 Copyright of figures and other materials in the paper belongs original authors. Artificial Metamorphosis: Evolutionary Design of Transforming, Soft-Bodied Robots Michał Joachimczak et al. Artificial Life
Copyright of figures and other materials in the paper belongs original authors. Artificial Metamorphosis: Evolutionary Design of Transforming, Soft-Bodied Robots Michał Joachimczak et al. Artificial Life
Rhythmic Robot Arm Control Using Oscillators
 Rhythmic Robot Arm Control Using Oscillators Matthew M. Williamson MIT AI Lab, 545 Technology Square, Cambridge, MA 2139 http://www.ai.mit.edu/people/matt Abstract This paper presents an approach to robot
Rhythmic Robot Arm Control Using Oscillators Matthew M. Williamson MIT AI Lab, 545 Technology Square, Cambridge, MA 2139 http://www.ai.mit.edu/people/matt Abstract This paper presents an approach to robot
Biped Locomotion and Stability
 Biped Locomotion and Stability A Practical Approach Jesse van den Kieboom s141474 March 29 Master Thesis Artificial Intelligence Dept of Artificial Intelligence University of Groningen, The Netherlands
Biped Locomotion and Stability A Practical Approach Jesse van den Kieboom s141474 March 29 Master Thesis Artificial Intelligence Dept of Artificial Intelligence University of Groningen, The Netherlands
Lecture 13: Dynamical Systems based Representation. Contents:
 Lecture 13: Dynamical Systems based Representation Contents: Differential Equation Force Fields, Velocity Fields Dynamical systems for Trajectory Plans Generating plans dynamically Fitting (or modifying)
Lecture 13: Dynamical Systems based Representation Contents: Differential Equation Force Fields, Velocity Fields Dynamical systems for Trajectory Plans Generating plans dynamically Fitting (or modifying)
Evolutionary Approaches to Neural Control of Rolling, Walking, Swimming and Flying Animats or Robots
 Evolutionary Approaches to Neural Control of Rolling, Walking, Swimming and Flying Animats or Robots Jean-Arcady Meyer, Stéphane Doncieux, David Filliat and Agnès Guillot AnimatLab Lip6 8 rue du Capitaine
Evolutionary Approaches to Neural Control of Rolling, Walking, Swimming and Flying Animats or Robots Jean-Arcady Meyer, Stéphane Doncieux, David Filliat and Agnès Guillot AnimatLab Lip6 8 rue du Capitaine
Learning Manipulation Patterns
 Introduction Dynamic Movement Primitives Reinforcement Learning Neuroinformatics Group February 29, 2012 Introduction Dynamic Movement Primitives Reinforcement Learning Motivation shift to reactive motion
Introduction Dynamic Movement Primitives Reinforcement Learning Neuroinformatics Group February 29, 2012 Introduction Dynamic Movement Primitives Reinforcement Learning Motivation shift to reactive motion
COMP3411: Artificial Intelligence 10a. Evolutionary Computation
 COMP3411 16s1 Evolutionary Computation 1 COMP3411: Artificial Intelligence 10a. Evolutionary Computation Outline Darwinian Evolution Evolutionary Computation paradigms Simulated Hockey Evolutionary Robotics
COMP3411 16s1 Evolutionary Computation 1 COMP3411: Artificial Intelligence 10a. Evolutionary Computation Outline Darwinian Evolution Evolutionary Computation paradigms Simulated Hockey Evolutionary Robotics
Evolving multi-segment super-lamprey CPG s for increased swimming control
 Evolving multi-segment super-lamprey CPG s for increased swimming control Leena N. Patel 1 and Alan Murray 1 and John Hallam 2 1- School of Engineering and Electronics, The University of Edinburgh, Kings
Evolving multi-segment super-lamprey CPG s for increased swimming control Leena N. Patel 1 and Alan Murray 1 and John Hallam 2 1- School of Engineering and Electronics, The University of Edinburgh, Kings
Genetic Engineering and Creative Design
 Genetic Engineering and Creative Design Background genes, genotype, phenotype, fitness Connecting genes to performance in fitness Emergent gene clusters evolved genes MIT Class 4.208 Spring 2002 Evolution
Genetic Engineering and Creative Design Background genes, genotype, phenotype, fitness Connecting genes to performance in fitness Emergent gene clusters evolved genes MIT Class 4.208 Spring 2002 Evolution
ELEC4631 s Lecture 2: Dynamic Control Systems 7 March Overview of dynamic control systems
 ELEC4631 s Lecture 2: Dynamic Control Systems 7 March 2011 Overview of dynamic control systems Goals of Controller design Autonomous dynamic systems Linear Multi-input multi-output (MIMO) systems Bat flight
ELEC4631 s Lecture 2: Dynamic Control Systems 7 March 2011 Overview of dynamic control systems Goals of Controller design Autonomous dynamic systems Linear Multi-input multi-output (MIMO) systems Bat flight
Chapter 1 Introduction
 Chapter 1 Introduction 1.1 Introduction to Chapter This chapter starts by describing the problems addressed by the project. The aims and objectives of the research are outlined and novel ideas discovered
Chapter 1 Introduction 1.1 Introduction to Chapter This chapter starts by describing the problems addressed by the project. The aims and objectives of the research are outlined and novel ideas discovered
Chapter 8: Introduction to Evolutionary Computation
 Computational Intelligence: Second Edition Contents Some Theories about Evolution Evolution is an optimization process: the aim is to improve the ability of an organism to survive in dynamically changing
Computational Intelligence: Second Edition Contents Some Theories about Evolution Evolution is an optimization process: the aim is to improve the ability of an organism to survive in dynamically changing
biologically-inspired computing lecture 18
 Informatics -inspired lecture 18 Sections I485/H400 course outlook Assignments: 35% Students will complete 4/5 assignments based on algorithms presented in class Lab meets in I1 (West) 109 on Lab Wednesdays
Informatics -inspired lecture 18 Sections I485/H400 course outlook Assignments: 35% Students will complete 4/5 assignments based on algorithms presented in class Lab meets in I1 (West) 109 on Lab Wednesdays
DETECTING THE FAULT FROM SPECTROGRAMS BY USING GENETIC ALGORITHM TECHNIQUES
 DETECTING THE FAULT FROM SPECTROGRAMS BY USING GENETIC ALGORITHM TECHNIQUES Amin A. E. 1, El-Geheni A. S. 2, and El-Hawary I. A **. El-Beali R. A. 3 1 Mansoura University, Textile Department 2 Prof. Dr.
DETECTING THE FAULT FROM SPECTROGRAMS BY USING GENETIC ALGORITHM TECHNIQUES Amin A. E. 1, El-Geheni A. S. 2, and El-Hawary I. A **. El-Beali R. A. 3 1 Mansoura University, Textile Department 2 Prof. Dr.
V. Evolutionary Computing. Read Flake, ch. 20. Genetic Algorithms. Part 5A: Genetic Algorithms 4/10/17. A. Genetic Algorithms
 V. Evolutionary Computing A. Genetic Algorithms 4/10/17 1 Read Flake, ch. 20 4/10/17 2 Genetic Algorithms Developed by John Holland in 60s Did not become popular until late 80s A simplified model of genetics
V. Evolutionary Computing A. Genetic Algorithms 4/10/17 1 Read Flake, ch. 20 4/10/17 2 Genetic Algorithms Developed by John Holland in 60s Did not become popular until late 80s A simplified model of genetics
Repeated Structure and Dissociation of Genotypic and Phenotypic Complexity in Artificial Ontogeny
 Repeated Structure and Dissociation of Genotypic and Phenotypic Complexity in Artificial Ontogeny Josh C. Bongard Rolf Pfeifer Artificial Intelligence Laboratory University of Zürich CH-8057 Zürich, Switzerland
Repeated Structure and Dissociation of Genotypic and Phenotypic Complexity in Artificial Ontogeny Josh C. Bongard Rolf Pfeifer Artificial Intelligence Laboratory University of Zürich CH-8057 Zürich, Switzerland
An Improved System for Artificial Creatures Evolution
 An Improved System for Artificial Creatures Evolution Thomas Miconi 1 and Alastair Channon 1 1 University of Birmingham, Edgbaston B152TT, Birmingham, UK t.miconi@cs.bham.ac.uk Abstract We present our
An Improved System for Artificial Creatures Evolution Thomas Miconi 1 and Alastair Channon 1 1 University of Birmingham, Edgbaston B152TT, Birmingham, UK t.miconi@cs.bham.ac.uk Abstract We present our
Evolutionary computation
 Evolutionary computation Andrea Roli andrea.roli@unibo.it DEIS Alma Mater Studiorum Università di Bologna Evolutionary computation p. 1 Evolutionary Computation Evolutionary computation p. 2 Evolutionary
Evolutionary computation Andrea Roli andrea.roli@unibo.it DEIS Alma Mater Studiorum Università di Bologna Evolutionary computation p. 1 Evolutionary Computation Evolutionary computation p. 2 Evolutionary
V. Evolutionary Computing. Read Flake, ch. 20. Assumptions. Genetic Algorithms. Fitness-Biased Selection. Outline of Simplified GA
 Part 5A: Genetic Algorithms V. Evolutionary Computing A. Genetic Algorithms Read Flake, ch. 20 1 2 Genetic Algorithms Developed by John Holland in 60s Did not become popular until late 80s A simplified
Part 5A: Genetic Algorithms V. Evolutionary Computing A. Genetic Algorithms Read Flake, ch. 20 1 2 Genetic Algorithms Developed by John Holland in 60s Did not become popular until late 80s A simplified
IV. Evolutionary Computing. Read Flake, ch. 20. Assumptions. Genetic Algorithms. Fitness-Biased Selection. Outline of Simplified GA
 IV. Evolutionary Computing A. Genetic Algorithms Read Flake, ch. 20 2014/2/26 1 2014/2/26 2 Genetic Algorithms Developed by John Holland in 60s Did not become popular until late 80s A simplified model
IV. Evolutionary Computing A. Genetic Algorithms Read Flake, ch. 20 2014/2/26 1 2014/2/26 2 Genetic Algorithms Developed by John Holland in 60s Did not become popular until late 80s A simplified model
Non-Adaptive Evolvability. Jeff Clune
 Non-Adaptive Evolvability! Jeff Clune Assistant Professor Computer Science Evolving Artificial Intelligence Laboratory Evolution Fails to Optimize Mutation Rates (though it would improve evolvability)
Non-Adaptive Evolvability! Jeff Clune Assistant Professor Computer Science Evolving Artificial Intelligence Laboratory Evolution Fails to Optimize Mutation Rates (though it would improve evolvability)
Robotics. Dynamics. Marc Toussaint U Stuttgart
 Robotics Dynamics 1D point mass, damping & oscillation, PID, dynamics of mechanical systems, Euler-Lagrange equation, Newton-Euler recursion, general robot dynamics, joint space control, reference trajectory
Robotics Dynamics 1D point mass, damping & oscillation, PID, dynamics of mechanical systems, Euler-Lagrange equation, Newton-Euler recursion, general robot dynamics, joint space control, reference trajectory
Implementation Issues for the Virtual Spring
 Implementation Issues for the Virtual Spring J. S. Freudenberg EECS 461 Embedded Control Systems 1 Introduction One of the tasks in Lab 4 is to attach the haptic wheel to a virtual reference position with
Implementation Issues for the Virtual Spring J. S. Freudenberg EECS 461 Embedded Control Systems 1 Introduction One of the tasks in Lab 4 is to attach the haptic wheel to a virtual reference position with
A Generalized Quantum-Inspired Evolutionary Algorithm for Combinatorial Optimization Problems
 A Generalized Quantum-Inspired Evolutionary Algorithm for Combinatorial Optimization Problems Julio M. Alegría 1 julio.alegria@ucsp.edu.pe Yván J. Túpac 1 ytupac@ucsp.edu.pe 1 School of Computer Science
A Generalized Quantum-Inspired Evolutionary Algorithm for Combinatorial Optimization Problems Julio M. Alegría 1 julio.alegria@ucsp.edu.pe Yván J. Túpac 1 ytupac@ucsp.edu.pe 1 School of Computer Science
Lecture 5: Linear Genetic Programming
 Lecture 5: Linear Genetic Programming CIU036 Artificial Intelligence 2, 2010 Krister Wolff, Ph.D. Department of Applied Mechanics Chalmers University of Technology 41296 Göteborg, Sweden krister.wolff@chalmers.se
Lecture 5: Linear Genetic Programming CIU036 Artificial Intelligence 2, 2010 Krister Wolff, Ph.D. Department of Applied Mechanics Chalmers University of Technology 41296 Göteborg, Sweden krister.wolff@chalmers.se
Evolution of Bilateral Symmetry in Agents Controlled by Spiking Neural Networks
 Evolution of Bilateral Symmetry in Agents Controlled by Spiking Neural Networks Nicolas Oros, Volker Steuber, Neil Davey, Lola Cañamero, and Rod Adams Science and Technology Research Institute, University
Evolution of Bilateral Symmetry in Agents Controlled by Spiking Neural Networks Nicolas Oros, Volker Steuber, Neil Davey, Lola Cañamero, and Rod Adams Science and Technology Research Institute, University
Choice of robot morphology can prohibit modular control and disrupt evolution
 Choice of robot morphology can prohibit modular control and disrupt evolution Anton Bernatskiy 1 and Josh Bongard 1 1 Department of Computer Science, University of Vermont abernats@uvm.edu Abstract In
Choice of robot morphology can prohibit modular control and disrupt evolution Anton Bernatskiy 1 and Josh Bongard 1 1 Department of Computer Science, University of Vermont abernats@uvm.edu Abstract In
Competitive Co-evolution
 Competitive Co-evolution Robert Lowe Motivations for studying Competitive co-evolution Evolve interesting behavioural strategies - fitness relative to opponent (zero sum game) Observe dynamics of evolving
Competitive Co-evolution Robert Lowe Motivations for studying Competitive co-evolution Evolve interesting behavioural strategies - fitness relative to opponent (zero sum game) Observe dynamics of evolving
Robotics. Dynamics. University of Stuttgart Winter 2018/19
 Robotics Dynamics 1D point mass, damping & oscillation, PID, dynamics of mechanical systems, Euler-Lagrange equation, Newton-Euler, joint space control, reference trajectory following, optimal operational
Robotics Dynamics 1D point mass, damping & oscillation, PID, dynamics of mechanical systems, Euler-Lagrange equation, Newton-Euler, joint space control, reference trajectory following, optimal operational
Development. biologically-inspired computing. lecture 16. Informatics luis rocha x x x. Syntactic Operations. biologically Inspired computing
 lecture 16 -inspired S S2 n p!!! 1 S Syntactic Operations al Code:N Development x x x 1 2 n p S Sections I485/H400 course outlook Assignments: 35% Students will complete 4/5 assignments based on algorithms
lecture 16 -inspired S S2 n p!!! 1 S Syntactic Operations al Code:N Development x x x 1 2 n p S Sections I485/H400 course outlook Assignments: 35% Students will complete 4/5 assignments based on algorithms
biologically-inspired computing lecture 6 Informatics luis rocha 2015 INDIANA UNIVERSITY biologically Inspired computing
 lecture 6 -inspired Sections I485/H400 course outlook Assignments: 35% Students will complete 4/5 assignments based on algorithms presented in class Lab meets in I1 (West) 109 on Lab Wednesdays Lab 0 :
lecture 6 -inspired Sections I485/H400 course outlook Assignments: 35% Students will complete 4/5 assignments based on algorithms presented in class Lab meets in I1 (West) 109 on Lab Wednesdays Lab 0 :
Data Warehousing & Data Mining
 13. Meta-Algorithms for Classification Data Warehousing & Data Mining Wolf-Tilo Balke Silviu Homoceanu Institut für Informationssysteme Technische Universität Braunschweig http://www.ifis.cs.tu-bs.de 13.
13. Meta-Algorithms for Classification Data Warehousing & Data Mining Wolf-Tilo Balke Silviu Homoceanu Institut für Informationssysteme Technische Universität Braunschweig http://www.ifis.cs.tu-bs.de 13.
An adaptive neural controller for a tendon driven robotic hand
 Book Title Book Editors IOS Press, 2003 1 An adaptive neural controller for a tendon driven robotic hand Gabriel Gómez a,1, Alejandro Hernandez b and Peter Eggenberger Hotz a a Artificial Intelligence
Book Title Book Editors IOS Press, 2003 1 An adaptive neural controller for a tendon driven robotic hand Gabriel Gómez a,1, Alejandro Hernandez b and Peter Eggenberger Hotz a a Artificial Intelligence
Modeling of Resonators
 . 23 Modeling of Resonators 23 1 Chapter 23: MODELING OF RESONATORS 23 2 23.1 A GENERIC RESONATOR A second example where simplified discrete modeling has been found valuable is in the assessment of the
. 23 Modeling of Resonators 23 1 Chapter 23: MODELING OF RESONATORS 23 2 23.1 A GENERIC RESONATOR A second example where simplified discrete modeling has been found valuable is in the assessment of the
Design and Control of Compliant Humanoids. Alin Albu-Schäffer. DLR German Aerospace Center Institute of Robotics and Mechatronics
 Design and Control of Compliant Humanoids Alin Albu-Schäffer DLR German Aerospace Center Institute of Robotics and Mechatronics Torque Controlled Light-weight Robots Torque sensing in each joint Mature
Design and Control of Compliant Humanoids Alin Albu-Schäffer DLR German Aerospace Center Institute of Robotics and Mechatronics Torque Controlled Light-weight Robots Torque sensing in each joint Mature
- - Reconfigurable Self-Replicating Robotics
 - - Reconfigurable Self-Replicating Robotics Abhishek Dutta E H U N I V E R S I T Y T O H F R G E D I N B U Master of Science School of Informatics University of Edinburgh 2007 Abstract Self-replication
- - Reconfigurable Self-Replicating Robotics Abhishek Dutta E H U N I V E R S I T Y T O H F R G E D I N B U Master of Science School of Informatics University of Edinburgh 2007 Abstract Self-replication
Neuroevolution for sound event detection in real life audio: A pilot study
 Neuroevolution for sound event detection in real life audio: A pilot study Christian Kroos & Mark D. Plumbley Centre for Vision, Speech and Signal Processing (CVSSP), University of Surrey, UK Background
Neuroevolution for sound event detection in real life audio: A pilot study Christian Kroos & Mark D. Plumbley Centre for Vision, Speech and Signal Processing (CVSSP), University of Surrey, UK Background
Toward Open-Ended Evolutionary Robotics: Evolving Elementary Robotic Units able to Self- Assemble and Self-Reproduce
 Toward Open-Ended Evolutionary Robotics: Evolving Elementary Robotic Units able to Self- Assemble and Self-Reproduce Raffaele Bianco & Stefano Nolfi Institute of Cognitive Sciences and Technologies, CNR
Toward Open-Ended Evolutionary Robotics: Evolving Elementary Robotic Units able to Self- Assemble and Self-Reproduce Raffaele Bianco & Stefano Nolfi Institute of Cognitive Sciences and Technologies, CNR
Game Physics. Game and Media Technology Master Program - Utrecht University. Dr. Nicolas Pronost
 Game and Media Technology Master Program - Utrecht University Dr. Nicolas Pronost Rigid body physics Particle system Most simple instance of a physics system Each object (body) is a particle Each particle
Game and Media Technology Master Program - Utrecht University Dr. Nicolas Pronost Rigid body physics Particle system Most simple instance of a physics system Each object (body) is a particle Each particle
Acknowledgements. Feedback Control of Bipedal Locomotion RAS Pioneer Award to Mark Spong. Videos and Papers
 Feedback Control of Bipedal Locomotion Acknowledgements Hae Won Park Post Doc MIT Koushil Sreenath Post Doc UPenn University of Michigan Jessy W. Grizzle Jerry W. and Carol L. Levin Professor of Engineering
Feedback Control of Bipedal Locomotion Acknowledgements Hae Won Park Post Doc MIT Koushil Sreenath Post Doc UPenn University of Michigan Jessy W. Grizzle Jerry W. and Carol L. Levin Professor of Engineering
Laboratory 11 Control Systems Laboratory ECE3557. State Feedback Controller for Position Control of a Flexible Joint
 Laboratory 11 State Feedback Controller for Position Control of a Flexible Joint 11.1 Objective The objective of this laboratory is to design a full state feedback controller for endpoint position control
Laboratory 11 State Feedback Controller for Position Control of a Flexible Joint 11.1 Objective The objective of this laboratory is to design a full state feedback controller for endpoint position control
The Effect of Connection Cost on Modularity in Evolved Neural Networks
 The Effect of Connection Cost on Modularity in Evolved Neural Networks Jessica Lowell 1 and Jordan Pollack 1 1 DEMO Lab, School of Computer Science, Brandeis University, Waltham, MA 02453 jessiehl@cs.brandeis.edu
The Effect of Connection Cost on Modularity in Evolved Neural Networks Jessica Lowell 1 and Jordan Pollack 1 1 DEMO Lab, School of Computer Science, Brandeis University, Waltham, MA 02453 jessiehl@cs.brandeis.edu
Full Paper Proceeding ECBA-2017, Vol Issue. 37, 1-11 ECBA-17. Optimization of Central Patterns Generators. 1, 2,3 Atılım University, Turkey
 Full Paper Proceeding ECBA-017, Vol. 00 - Issue. 37, 1-11 ECBA-17 Optimization of Central Patterns Generators FULL PAPER PROCEEDING Multidisciplinary Studies Available online at www.academicfora.com Abdalftah
Full Paper Proceeding ECBA-017, Vol. 00 - Issue. 37, 1-11 ECBA-17 Optimization of Central Patterns Generators FULL PAPER PROCEEDING Multidisciplinary Studies Available online at www.academicfora.com Abdalftah
Effect of number of hidden neurons on learning in large-scale layered neural networks
 ICROS-SICE International Joint Conference 009 August 18-1, 009, Fukuoka International Congress Center, Japan Effect of on learning in large-scale layered neural networks Katsunari Shibata (Oita Univ.;
ICROS-SICE International Joint Conference 009 August 18-1, 009, Fukuoka International Congress Center, Japan Effect of on learning in large-scale layered neural networks Katsunari Shibata (Oita Univ.;
Neuroevolutionary Planning for Robotic Control
 Neuroevolutionary Planning for Robotic Control Reza Mahjourian Department of Computer Science The University of Texas at Austin Austin, TX 78712 reza@cs.utexas.edu Doctoral Dissertation Proposal Supervising
Neuroevolutionary Planning for Robotic Control Reza Mahjourian Department of Computer Science The University of Texas at Austin Austin, TX 78712 reza@cs.utexas.edu Doctoral Dissertation Proposal Supervising
Shigetaka Fujita. Rokkodai, Nada, Kobe 657, Japan. Haruhiko Nishimura. Yashiro-cho, Kato-gun, Hyogo , Japan. Abstract
 KOBE-TH-94-07 HUIS-94-03 November 1994 An Evolutionary Approach to Associative Memory in Recurrent Neural Networks Shigetaka Fujita Graduate School of Science and Technology Kobe University Rokkodai, Nada,
KOBE-TH-94-07 HUIS-94-03 November 1994 An Evolutionary Approach to Associative Memory in Recurrent Neural Networks Shigetaka Fujita Graduate School of Science and Technology Kobe University Rokkodai, Nada,
On the Difficulty of Co-Optimizing Morphology and Control in Evolved Virtual Creatures
 On the Difficulty of Co-Optimizing Morphology and Control in Evolved Virtual Creatures Nick Cheney 1, Josh Bongard 2, Vytas SunSpiral 3 and Hod Lipson 4 1 Department of Biological Statistics and Computational
On the Difficulty of Co-Optimizing Morphology and Control in Evolved Virtual Creatures Nick Cheney 1, Josh Bongard 2, Vytas SunSpiral 3 and Hod Lipson 4 1 Department of Biological Statistics and Computational
Neural Network Control of Robot Manipulators and Nonlinear Systems
 Neural Network Control of Robot Manipulators and Nonlinear Systems F.L. LEWIS Automation and Robotics Research Institute The University of Texas at Arlington S. JAG ANNATHAN Systems and Controls Research
Neural Network Control of Robot Manipulators and Nonlinear Systems F.L. LEWIS Automation and Robotics Research Institute The University of Texas at Arlington S. JAG ANNATHAN Systems and Controls Research
biologically-inspired computing lecture 5 Informatics luis rocha 2015 biologically Inspired computing INDIANA UNIVERSITY
 lecture 5 -inspired Sections I485/H400 course outlook Assignments: 35% Students will complete 4/5 assignments based on algorithms presented in class Lab meets in I1 (West) 109 on Lab Wednesdays Lab 0 :
lecture 5 -inspired Sections I485/H400 course outlook Assignments: 35% Students will complete 4/5 assignments based on algorithms presented in class Lab meets in I1 (West) 109 on Lab Wednesdays Lab 0 :
HIGH PERFORMANCE ADAPTIVE INTELLIGENT DIRECT TORQUE CONTROL SCHEMES FOR INDUCTION MOTOR DRIVES
 HIGH PERFORMANCE ADAPTIVE INTELLIGENT DIRECT TORQUE CONTROL SCHEMES FOR INDUCTION MOTOR DRIVES M. Vasudevan and R. Arumugam Department of Electrical and Electronics Engineering, Anna University, Chennai,
HIGH PERFORMANCE ADAPTIVE INTELLIGENT DIRECT TORQUE CONTROL SCHEMES FOR INDUCTION MOTOR DRIVES M. Vasudevan and R. Arumugam Department of Electrical and Electronics Engineering, Anna University, Chennai,
The Effect of Semicircular Feet on Energy Dissipation by Heel-strike in Dynamic Biped Locomotion
 7 IEEE International Conference on Robotics and Automation Roma, Italy, 1-14 April 7 FrC3.3 The Effect of Semicircular Feet on Energy Dissipation by Heel-strike in Dynamic Biped Locomotion Fumihiko Asano
7 IEEE International Conference on Robotics and Automation Roma, Italy, 1-14 April 7 FrC3.3 The Effect of Semicircular Feet on Energy Dissipation by Heel-strike in Dynamic Biped Locomotion Fumihiko Asano
Integer weight training by differential evolution algorithms
 Integer weight training by differential evolution algorithms V.P. Plagianakos, D.G. Sotiropoulos, and M.N. Vrahatis University of Patras, Department of Mathematics, GR-265 00, Patras, Greece. e-mail: vpp
Integer weight training by differential evolution algorithms V.P. Plagianakos, D.G. Sotiropoulos, and M.N. Vrahatis University of Patras, Department of Mathematics, GR-265 00, Patras, Greece. e-mail: vpp
Limbless locomotion 5/9/2018
 Limbless locomotion 5/9/2018 Limbless locomotion Biological inspiration Modes of movement Physics of interaction with the ground Robot examples Actuation Control Limbless locomotion Limbless locomotion
Limbless locomotion 5/9/2018 Limbless locomotion Biological inspiration Modes of movement Physics of interaction with the ground Robot examples Actuation Control Limbless locomotion Limbless locomotion
COMPETITIVE CO-EVOLUTION OF SENSORY-MOTOR SYSTEMS
 COMPETITIVE CO-EVOLUTION OF SENSORY-MOTOR SYSTEMS (HS-IDA-MD-02-004) Gunnar Búason Submitted by Gunnar Búason to the University of Skövde as a dissertation towards the degree of M.Sc. by examination and
COMPETITIVE CO-EVOLUTION OF SENSORY-MOTOR SYSTEMS (HS-IDA-MD-02-004) Gunnar Búason Submitted by Gunnar Búason to the University of Skövde as a dissertation towards the degree of M.Sc. by examination and
Hopfield Neural Network and Associative Memory. Typical Myelinated Vertebrate Motoneuron (Wikipedia) Topic 3 Polymers and Neurons Lecture 5
 Topic 3 Polymers and Neurons Lecture 5") Hopfield Neural Network and Associative Memory Typical Myelinated Vertebrate Motoneuron (Wikipedia) PHY 411-506 Computational Physics 2 1 Wednesday, March 5 1906 Nobel Prize in Physiology or Medicine.
Hopfield Neural Network and Associative Memory Typical Myelinated Vertebrate Motoneuron (Wikipedia) PHY 411-506 Computational Physics 2 1 Wednesday, March 5 1906 Nobel Prize in Physiology or Medicine.
Artificial Neural Networks D B M G. Data Base and Data Mining Group of Politecnico di Torino. Elena Baralis. Politecnico di Torino
 Artificial Neural Networks Data Base and Data Mining Group of Politecnico di Torino Elena Baralis Politecnico di Torino Artificial Neural Networks Inspired to the structure of the human brain Neurons as
Artificial Neural Networks Data Base and Data Mining Group of Politecnico di Torino Elena Baralis Politecnico di Torino Artificial Neural Networks Inspired to the structure of the human brain Neurons as
Evolutionary Computation
 Evolutionary Computation - Computational procedures patterned after biological evolution. - Search procedure that probabilistically applies search operators to set of points in the search space. - Lamarck
Evolutionary Computation - Computational procedures patterned after biological evolution. - Search procedure that probabilistically applies search operators to set of points in the search space. - Lamarck
Coordinating Feet in Bipedal Balance
 Coordinating Feet in Bipedal Balance S.O. Anderson, C.G. Atkeson, J.K. Hodgins Robotics Institute Carnegie Mellon University soa,cga,jkh@ri.cmu.edu Abstract Biomechanical models of human standing balance
Coordinating Feet in Bipedal Balance S.O. Anderson, C.G. Atkeson, J.K. Hodgins Robotics Institute Carnegie Mellon University soa,cga,jkh@ri.cmu.edu Abstract Biomechanical models of human standing balance
Embodied Embeddings for Hyperneat
 Embodied Embeddings for Hyperneat Collin Cappelle, Josh Bongard The University of Vermont, Burlington, VT 05405 collin.cappelle@uvm.edu Abstract A long time goal of evolutionary roboticists is to create
Embodied Embeddings for Hyperneat Collin Cappelle, Josh Bongard The University of Vermont, Burlington, VT 05405 collin.cappelle@uvm.edu Abstract A long time goal of evolutionary roboticists is to create
Lecture «Robot Dynamics»: Dynamics and Control
 Lecture «Robot Dynamics»: Dynamics and Control 151-0851-00 V lecture: CAB G11 Tuesday 10:15 12:00, every week exercise: HG E1.2 Wednesday 8:15 10:00, according to schedule (about every 2nd week) Marco
Lecture «Robot Dynamics»: Dynamics and Control 151-0851-00 V lecture: CAB G11 Tuesday 10:15 12:00, every week exercise: HG E1.2 Wednesday 8:15 10:00, according to schedule (about every 2nd week) Marco
Week 3: Wheeled Kinematics AMR - Autonomous Mobile Robots
 Week 3: Wheeled Kinematics AMR - Paul Furgale Margarita Chli, Marco Hutter, Martin Rufli, Davide Scaramuzza, Roland Siegwart Wheeled Kinematics 1 AMRx Flipped Classroom A Matlab exercise is coming later
Week 3: Wheeled Kinematics AMR - Paul Furgale Margarita Chli, Marco Hutter, Martin Rufli, Davide Scaramuzza, Roland Siegwart Wheeled Kinematics 1 AMRx Flipped Classroom A Matlab exercise is coming later
Port-based Modeling and Control for Efficient Bipedal Walking Machines
 Port-based Modeling and Control for Efficient Bipedal Walking Machines Vincent Duindam vincentd@eecs.berkeley.edu Control Laboratory, EE-Math-CS University of Twente, Netherlands Joint work with Stefano
Port-based Modeling and Control for Efficient Bipedal Walking Machines Vincent Duindam vincentd@eecs.berkeley.edu Control Laboratory, EE-Math-CS University of Twente, Netherlands Joint work with Stefano
Evolutionary Computation. DEIS-Cesena Alma Mater Studiorum Università di Bologna Cesena (Italia)
") Evolutionary Computation DEIS-Cesena Alma Mater Studiorum Università di Bologna Cesena (Italia) andrea.roli@unibo.it Evolutionary Computation Inspiring principle: theory of natural selection Species face
Evolutionary Computation DEIS-Cesena Alma Mater Studiorum Università di Bologna Cesena (Italia) andrea.roli@unibo.it Evolutionary Computation Inspiring principle: theory of natural selection Species face
1 Evolutionary and Neural Synthesis of Intelligent Agents
 MIT Press Math6X9/2001/02/08:14:23 Page 1 1 Evolutionary and Neural Synthesis of Intelligent Agents Karthik Balakrishnan and Vasant Honavar 1.1 Introduction From its very inception in the late 1950s and
MIT Press Math6X9/2001/02/08:14:23 Page 1 1 Evolutionary and Neural Synthesis of Intelligent Agents Karthik Balakrishnan and Vasant Honavar 1.1 Introduction From its very inception in the late 1950s and
Evolutionary Design I
 Evolutionary Design I Jason Noble jasonn@comp.leeds.ac.uk Biosystems group, School of Computing Evolutionary Design I p.1/29 This lecture Harnessing evolution in a computer program How to construct a genetic
Evolutionary Design I Jason Noble jasonn@comp.leeds.ac.uk Biosystems group, School of Computing Evolutionary Design I p.1/29 This lecture Harnessing evolution in a computer program How to construct a genetic
CPG-based control of a turtle-like underwater vehicle
 Auton Robot (2010) 28: 247 269 DOI 10.1007/s10514-009-9169-0 CPG-based control of a turtle-like underwater vehicle Keehong Seo Soon-Jo Chung Jean-Jacques E. Slotine Received: 1 April 2009 / Accepted: 17
Auton Robot (2010) 28: 247 269 DOI 10.1007/s10514-009-9169-0 CPG-based control of a turtle-like underwater vehicle Keehong Seo Soon-Jo Chung Jean-Jacques E. Slotine Received: 1 April 2009 / Accepted: 17
The Jacobian. Jesse van den Kieboom
 The Jacobian Jesse van den Kieboom jesse.vandenkieboom@epfl.ch 1 Introduction 1 1 Introduction The Jacobian is an important concept in robotics. Although the general concept of the Jacobian in robotics
The Jacobian Jesse van den Kieboom jesse.vandenkieboom@epfl.ch 1 Introduction 1 1 Introduction The Jacobian is an important concept in robotics. Although the general concept of the Jacobian in robotics
Emulation of an Animal Limb with Two Degrees of Freedom using HIL
 Emulation of an Animal Limb with Two Degrees of Freedom using HIL Iván Bautista Gutiérrez, Fabián González Téllez, Dario Amaya H. Abstract The Bio-inspired robotic systems have been a focus of great interest
Emulation of an Animal Limb with Two Degrees of Freedom using HIL Iván Bautista Gutiérrez, Fabián González Téllez, Dario Amaya H. Abstract The Bio-inspired robotic systems have been a focus of great interest
A Novel Spring Mechanism to Reduce Energy Consumption of Robotic Arms
 IEEE Accepted as contributing paper at IROS A Novel Spring Mechanism to Reduce Energy Consumption of Robotic Arms Michiel Plooij and Martijn Wisse Abstract Most conventional robotic arms use motors to
IEEE Accepted as contributing paper at IROS A Novel Spring Mechanism to Reduce Energy Consumption of Robotic Arms Michiel Plooij and Martijn Wisse Abstract Most conventional robotic arms use motors to
Structure Learning of a Behavior Network for Context Dependent Adaptability
 Georgia State University ScholarWorks @ Georgia State University Computer Science Theses Department of Computer Science 12-7-26 Structure Learning of a Behavior Network for Context Dependent Adaptability
Georgia State University ScholarWorks @ Georgia State University Computer Science Theses Department of Computer Science 12-7-26 Structure Learning of a Behavior Network for Context Dependent Adaptability
a) Find the equation of motion of the system and write it in matrix form.
 Find the equation of motion of the system and write it in matrix form.") .003 Engineering Dynamics Problem Set Problem : Torsional Oscillator Two disks of radius r and r and mass m and m are mounted in series with steel shafts. The shaft between the base and m has length L
.003 Engineering Dynamics Problem Set Problem : Torsional Oscillator Two disks of radius r and r and mass m and m are mounted in series with steel shafts. The shaft between the base and m has length L
An Evolution Strategy for the Induction of Fuzzy Finite-state Automata
 Journal of Mathematics and Statistics 2 (2): 386-390, 2006 ISSN 1549-3644 Science Publications, 2006 An Evolution Strategy for the Induction of Fuzzy Finite-state Automata 1,2 Mozhiwen and 1 Wanmin 1 College
Journal of Mathematics and Statistics 2 (2): 386-390, 2006 ISSN 1549-3644 Science Publications, 2006 An Evolution Strategy for the Induction of Fuzzy Finite-state Automata 1,2 Mozhiwen and 1 Wanmin 1 College
Artificial Neural Networks Examination, June 2005
 Artificial Neural Networks Examination, June 2005 Instructions There are SIXTY questions. (The pass mark is 30 out of 60). For each question, please select a maximum of ONE of the given answers (either
Artificial Neural Networks Examination, June 2005 Instructions There are SIXTY questions. (The pass mark is 30 out of 60). For each question, please select a maximum of ONE of the given answers (either
CPG CONTROL OF A TENSEGRITY MORPHING STRUCTURE FOR BIOMIMETIC APPLICATIONS
 CPG CONTROL OF A TENSEGRITY MORPHING STRUCTURE FOR BIOMIMETIC APPLICATIONS T. K. BLISS, T. IWASAKI, and H. BART-SMITH University of Virginia Department of Mechanical and Aerospace Engineering 122 Engineer
CPG CONTROL OF A TENSEGRITY MORPHING STRUCTURE FOR BIOMIMETIC APPLICATIONS T. K. BLISS, T. IWASAKI, and H. BART-SMITH University of Virginia Department of Mechanical and Aerospace Engineering 122 Engineer
Decoupling Identification for Serial Two-link Robot Arm with Elastic Joints
 Preprints of the 1th IFAC Symposium on System Identification Saint-Malo, France, July 6-8, 9 Decoupling Identification for Serial Two-link Robot Arm with Elastic Joints Junji Oaki, Shuichi Adachi Corporate
Preprints of the 1th IFAC Symposium on System Identification Saint-Malo, France, July 6-8, 9 Decoupling Identification for Serial Two-link Robot Arm with Elastic Joints Junji Oaki, Shuichi Adachi Corporate
ARTIFICIAL NEURAL NETWORK PART I HANIEH BORHANAZAD
 ARTIFICIAL NEURAL NETWORK PART I HANIEH BORHANAZAD WHAT IS A NEURAL NETWORK? The simplest definition of a neural network, more properly referred to as an 'artificial' neural network (ANN), is provided
ARTIFICIAL NEURAL NETWORK PART I HANIEH BORHANAZAD WHAT IS A NEURAL NETWORK? The simplest definition of a neural network, more properly referred to as an 'artificial' neural network (ANN), is provided
Swarm-bots. Marco Dorigo FNRS Research Director IRIDIA Université Libre de Bruxelles
 Swarm-bots Marco Dorigo FNRS Research Director IRIDIA Université Libre de Bruxelles Swarm-bots The swarm-bot is an experiment in swarm robotics Swarm robotics is the application of swarm intelligence principles
Swarm-bots Marco Dorigo FNRS Research Director IRIDIA Université Libre de Bruxelles Swarm-bots The swarm-bot is an experiment in swarm robotics Swarm robotics is the application of swarm intelligence principles
Artificial Neural Network and Fuzzy Logic
 Artificial Neural Network and Fuzzy Logic 1 Syllabus 2 Syllabus 3 Books 1. Artificial Neural Networks by B. Yagnanarayan, PHI - (Cover Topologies part of unit 1 and All part of Unit 2) 2. Neural Networks
Artificial Neural Network and Fuzzy Logic 1 Syllabus 2 Syllabus 3 Books 1. Artificial Neural Networks by B. Yagnanarayan, PHI - (Cover Topologies part of unit 1 and All part of Unit 2) 2. Neural Networks
Lecture «Robot Dynamics»: Dynamics 2
 Lecture «Robot Dynamics»: Dynamics 2 151-0851-00 V lecture: CAB G11 Tuesday 10:15 12:00, every week exercise: HG E1.2 Wednesday 8:15 10:00, according to schedule (about every 2nd week) office hour: LEE
Lecture «Robot Dynamics»: Dynamics 2 151-0851-00 V lecture: CAB G11 Tuesday 10:15 12:00, every week exercise: HG E1.2 Wednesday 8:15 10:00, according to schedule (about every 2nd week) office hour: LEE
Evolutionary computation
 Evolutionary computation Andrea Roli andrea.roli@unibo.it Dept. of Computer Science and Engineering (DISI) Campus of Cesena Alma Mater Studiorum Università di Bologna Outline 1 Basic principles 2 Genetic
Evolutionary computation Andrea Roli andrea.roli@unibo.it Dept. of Computer Science and Engineering (DISI) Campus of Cesena Alma Mater Studiorum Università di Bologna Outline 1 Basic principles 2 Genetic
Chapter 7 Control. Part Classical Control. Mobile Robotics - Prof Alonzo Kelly, CMU RI
 Chapter 7 Control 7.1 Classical Control Part 1 1 7.1 Classical Control Outline 7.1.1 Introduction 7.1.2 Virtual Spring Damper 7.1.3 Feedback Control 7.1.4 Model Referenced and Feedforward Control Summary
Chapter 7 Control 7.1 Classical Control Part 1 1 7.1 Classical Control Outline 7.1.1 Introduction 7.1.2 Virtual Spring Damper 7.1.3 Feedback Control 7.1.4 Model Referenced and Feedforward Control Summary
CITEC SummerSchool 2013 Learning From Physics to Knowledge Selected Learning Methods
 CITEC SummerSchool 23 Learning From Physics to Knowledge Selected Learning Methods Robert Haschke Neuroinformatics Group CITEC, Bielefeld University September, th 23 Robert Haschke (CITEC) Learning From
CITEC SummerSchool 23 Learning From Physics to Knowledge Selected Learning Methods Robert Haschke Neuroinformatics Group CITEC, Bielefeld University September, th 23 Robert Haschke (CITEC) Learning From
Module 4: Dynamic Vibration Absorbers and Vibration Isolator Lecture 19: Active DVA. The Lecture Contains: Development of an Active DVA
 The Lecture Contains: Development of an Active DVA Proof Mass Actutor Application of Active DVA file:///d /chitra/vibration_upload/lecture19/19_1.htm[6/25/2012 12:35:51 PM] In this section, we will consider
The Lecture Contains: Development of an Active DVA Proof Mass Actutor Application of Active DVA file:///d /chitra/vibration_upload/lecture19/19_1.htm[6/25/2012 12:35:51 PM] In this section, we will consider
Quadrotor Modeling and Control for DLO Transportation
 Quadrotor Modeling and Control for DLO Transportation Thesis dissertation Advisor: Prof. Manuel Graña Computational Intelligence Group University of the Basque Country (UPV/EHU) Donostia Jun 24, 2016 Abstract
Quadrotor Modeling and Control for DLO Transportation Thesis dissertation Advisor: Prof. Manuel Graña Computational Intelligence Group University of the Basque Country (UPV/EHU) Donostia Jun 24, 2016 Abstract
Gravity Balancing of a Human Leg using an External Orthosis
 2007 IEEE International Conference on Robotics and Automation Roma, Italy, 10-14 April 2007 FrB8.3 Gravity Balancing of a Human Leg using an External Orthosis Abbas Fattah, Ph.D., and Sunil K. Agrawal,
2007 IEEE International Conference on Robotics and Automation Roma, Italy, 10-14 April 2007 FrB8.3 Gravity Balancing of a Human Leg using an External Orthosis Abbas Fattah, Ph.D., and Sunil K. Agrawal,
Case Study: The Pelican Prototype Robot
 5 Case Study: The Pelican Prototype Robot The purpose of this chapter is twofold: first, to present in detail the model of the experimental robot arm of the Robotics lab. from the CICESE Research Center,
5 Case Study: The Pelican Prototype Robot The purpose of this chapter is twofold: first, to present in detail the model of the experimental robot arm of the Robotics lab. from the CICESE Research Center,
Embedded Control: Applications and Theory
 Embedded Control: Applications and Theory IEEE Rock River Valley Section Ramavarapu RS Sreenivas UIUC 30 September 2010 Ramavarapu RS Sreenivas (UIUC) Embedded Control: Applications and Theory 30 September
Embedded Control: Applications and Theory IEEE Rock River Valley Section Ramavarapu RS Sreenivas UIUC 30 September 2010 Ramavarapu RS Sreenivas (UIUC) Embedded Control: Applications and Theory 30 September
Normalised evolutionary activity statistics and the need for phenotypic evidence
 Open Ended Evolution workshop, ECAL 2015 20 July 2015 Normalised evolutionary activity statistics and the need for phenotypic evidence Dr Alastair Channon School of Computing and Mathematics Keele University
Open Ended Evolution workshop, ECAL 2015 20 July 2015 Normalised evolutionary activity statistics and the need for phenotypic evidence Dr Alastair Channon School of Computing and Mathematics Keele University
AS3010: Introduction to Space Technology
 AS3010: Introduction to Space Technology L E C T U R E 22 Part B, Lecture 22 19 April, 2017 C O N T E N T S Attitude stabilization passive and active. Actuators for three axis or active stabilization.
AS3010: Introduction to Space Technology L E C T U R E 22 Part B, Lecture 22 19 April, 2017 C O N T E N T S Attitude stabilization passive and active. Actuators for three axis or active stabilization.
EVOLUTIONARY DYNAMICS OF 3D DIGITAL CONSTRUCTS. Jason Michael Stredwick A THESIS
 EVOLUTIONARY DYNAMICS OF 3D DIGITAL CONSTRUCTS By Jason Michael Stredwick A THESIS Submitted to Michigan State University in partial fulfillment of the requirements for the degree of MASTER OF SCIENCE
EVOLUTIONARY DYNAMICS OF 3D DIGITAL CONSTRUCTS By Jason Michael Stredwick A THESIS Submitted to Michigan State University in partial fulfillment of the requirements for the degree of MASTER OF SCIENCE
Artificial Intelligence (AI) Common AI Methods. Training. Signals to Perceptrons. Artificial Neural Networks (ANN) Artificial Intelligence
 Common AI Methods. Training. Signals to Perceptrons. Artificial Neural Networks (ANN) Artificial Intelligence") Artificial Intelligence (AI) Artificial Intelligence AI is an attempt to reproduce intelligent reasoning using machines * * H. M. Cartwright, Applications of Artificial Intelligence in Chemistry, 1993,
Artificial Intelligence (AI) Artificial Intelligence AI is an attempt to reproduce intelligent reasoning using machines * * H. M. Cartwright, Applications of Artificial Intelligence in Chemistry, 1993,
ARTISAN ( ) ARTISAN ( ) Human-Friendly Robot Design
 ARTISAN ( ) Human-Friendly Robot Design") Human-Friendly Robot Design Torque Control: a basic capability dynamic performance compliance, force control safety, interactivity manipulation cooperation ARTISAN (1990-95) ARTISAN (1990-95) 1 intelligence
Human-Friendly Robot Design Torque Control: a basic capability dynamic performance compliance, force control safety, interactivity manipulation cooperation ARTISAN (1990-95) ARTISAN (1990-95) 1 intelligence
Control of Mobile Robots
 Control of Mobile Robots Regulation and trajectory tracking Prof. Luca Bascetta (luca.bascetta@polimi.it) Politecnico di Milano Dipartimento di Elettronica, Informazione e Bioingegneria Organization and
Control of Mobile Robots Regulation and trajectory tracking Prof. Luca Bascetta (luca.bascetta@polimi.it) Politecnico di Milano Dipartimento di Elettronica, Informazione e Bioingegneria Organization and
Chapter 8. Fractals. 8.1 Introduction
 Chapter 8 Fractals 8.1 Introduction Nested patterns with some degree of self-similarity are not only found in decorative arts, but in many natural patterns as well (see Figure 8.1). In mathematics, nested
Chapter 8 Fractals 8.1 Introduction Nested patterns with some degree of self-similarity are not only found in decorative arts, but in many natural patterns as well (see Figure 8.1). In mathematics, nested
On String Languages Generated by Numerical P Systems
 ROMANIAN JOURNAL OF INFORMATION SCIENCE AND TECHNOLOGY Volume 8, Number 3, 205, 273 295 On String Languages Generated by Numerical P Systems Zhiqiang ZHANG, Tingfang WU, Linqiang PAN, Gheorghe PĂUN2 Key
ROMANIAN JOURNAL OF INFORMATION SCIENCE AND TECHNOLOGY Volume 8, Number 3, 205, 273 295 On String Languages Generated by Numerical P Systems Zhiqiang ZHANG, Tingfang WU, Linqiang PAN, Gheorghe PĂUN2 Key
Video 8.1 Vijay Kumar. Property of University of Pennsylvania, Vijay Kumar
 Video 8.1 Vijay Kumar 1 Definitions State State equations Equilibrium 2 Stability Stable Unstable Neutrally (Critically) Stable 3 Stability Translate the origin to x e x(t) =0 is stable (Lyapunov stable)
Video 8.1 Vijay Kumar 1 Definitions State State equations Equilibrium 2 Stability Stable Unstable Neutrally (Critically) Stable 3 Stability Translate the origin to x e x(t) =0 is stable (Lyapunov stable)