Maarten Bieshaar, Günther Reitberger, Stefan Zernetsch, Prof. Dr. Bernhard Sick, Dr. Erich Fuchs, Prof. Dr.-Ing. Konrad Doll
|
|
|
- Sharlene Stewart
- 5 years ago
- Views:
Transcription
1 Maarten Bieshaar, Günther Reitberger, Stefan Zernetsch, Prof. Dr. Bernhard Sick, Dr. Erich Fuchs, Prof. Dr.-Ing. Konrad Doll
2 By 2030 road traffic deaths will be the fifth leading cause of death (WHO report in 2013) 27% of 1.24 million victims worldwide are vulnerable road users (VRUs), e.g., pedestrians and cyclists Due to the ability of VRUs to suddenly start a motion or to change the direction, a dangerous situation may occur within some hundreds of milliseconds VRUs have to be indispensably considered also when reducing accidents and increasing traffic flow by cooperative, automated driving

 Improve the")
3 Use collective intelligence to forecast basic movement primitives and trajectories of VRUs in a distributed way Lay foundations for autonomous driving in mixed traffic scenarios Increase the safety of road users (in particular the safety of VRUs) Improve the traffic flow





4 Goal Predict Intention of VRU Requirements: Open dynamical system Real-time system Shared communication medium Multi-modal sensor-system Vehicle-, infrastructure-based sensors and smart devices Model and prediction of uncertainties
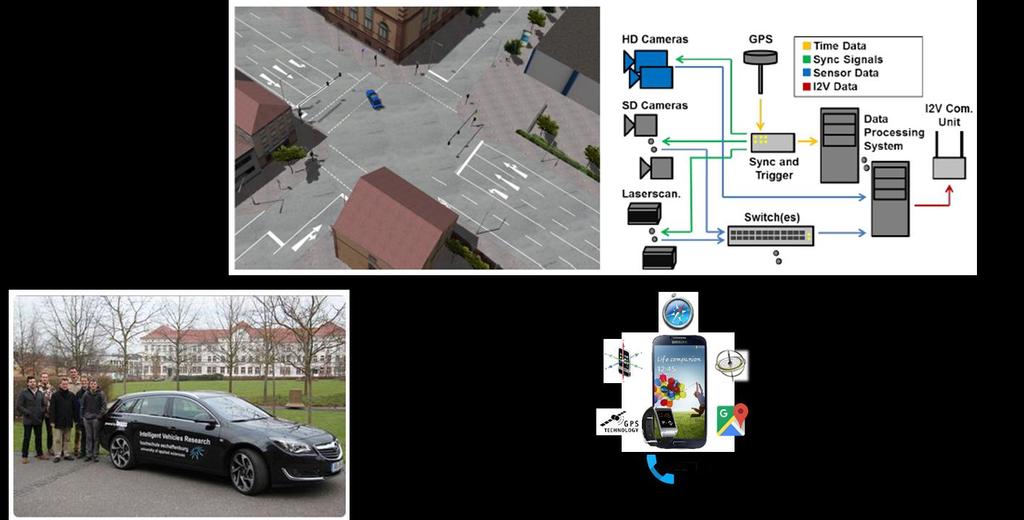

5
6

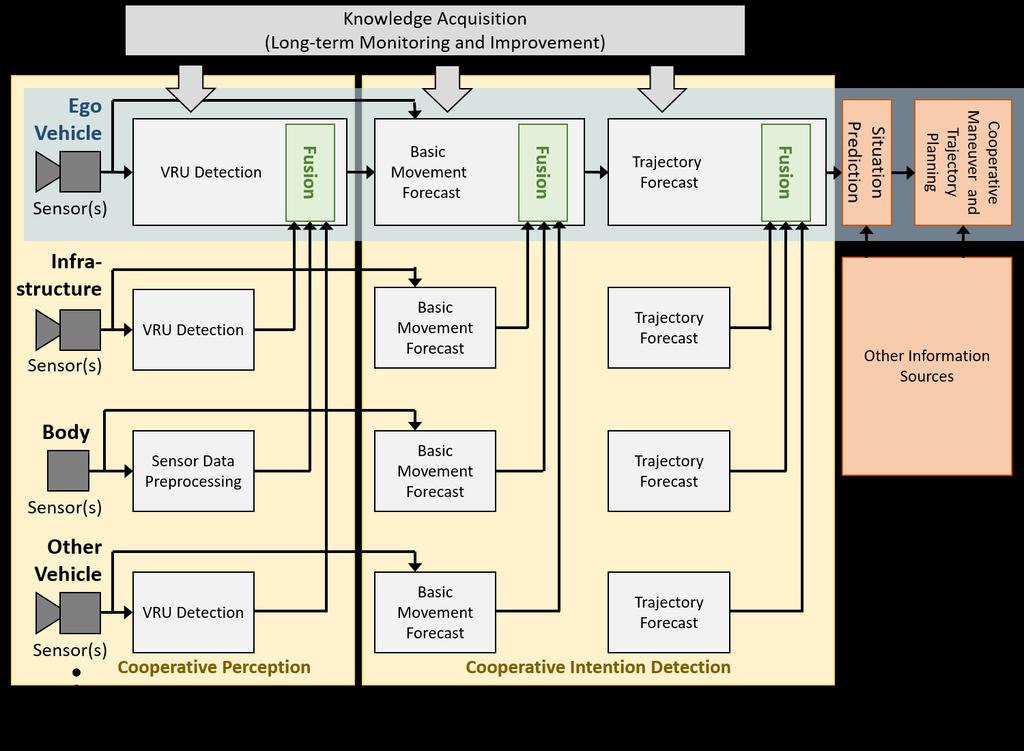
7 Cooperative VRU Perception and Intention Detection

8 Detection and tracking of VRUs in image sequences provided by cameras from vehicles and infrastructure HOG or multiscale features soft computing techniques e.g. SVM, MLP N. Dalal und B. Triggs, Histograms of Oriented Gradients for Human Detection, IEEE Conference on Computer Vision and Pattern Recognition, pp , 2005


9 Multi-view setup to confirm hypothesis M. Goldhammer, K. Doll, U. Brunsmann, A. Gensler und B. Sick, Pedestrian s Trajectory Forecast in Public Traffic with Artificial Neural Networks, in Proceedings of the Nd International Conference on Pattern Recognition, Stockholm, Sweden, pp , 2014

10 Forward results to intention detection Information: position, geometry and covariances
, 2016")
11 Movement Primitive Coefficients of Polynomial Approximation Forecast Trajectory using ANN Trajectory Forecast Stefan Zernetsch; Sascha Kohnen; Michael Goldhammer; Konrad Doll Bernhard Sick, Trajectory Prediction of Cyclists Using a Physical Model and an Artificial Neural Network, Intelligent Vehicles Symposium (IV), 2016 IEEE






12 32px Motion Contour Histograms of Oriented Gradients Detection Extract Edges Binarization Motion History Image 32px Divide Detection in Cells Magnitude Weighted Orientation Histogram Linear SVM
13 Experimental Results Red rectangle: Pedestrian ROI, Standing Green rectangle: Pedestrian ROI, Walking
14 Experimental Results Red rectangle: Pedestrian ROI, Standing Green rectangle: Pedestrian ROI, Walking




15 Artificial Neural Network using Polynomial Approximation Extract Head Trajectories Transform to Ego Coordinate Frame Polynomial Approximation of Velocities Polynomial Coefficients as Input and Output of MLP Predicted Velocities by Evaluation of Polynomials Reconstruction of Predicted Positions
 v ss F res :")

16 Physical Model Physical model for prediction of starting movement Assumption: Constant Force F res = F a + F i + F air + F r v t = v ss tanh a 0 (t + t 0 ) v ss F res : Resistance F a : Acceleration Resistance F i : Inclination Resistance F r : Rolling Resistance v ss : Steady State Velocity F air : Air Resistance t 0 : Time Delta a 0 : Acceleraton a t = 0
17 Start Forecast Model Comparison Average Euclidean Error for Prediction of 2.5 s (black: CV Model, red: physical Model, blue: MLP) Error Ellipsis r for Prediction of 2.5 s (0.5 s steps) (black: CV Model, red: physical Model, blue: MLP)
18 Stop Forecast Model Comparison Average Euclidean Error for Prediction of 2.5 s (black: CV Model, blue: MLP) Error Ellipsis r for Prediction of 2.5 s (0.5 s steps) (black: CV Model, blue: MLP)

19 Experimental Results
20 Types of Fusion Feature-Based Result-Based Basic Movement Forecast Basic Movement Forecast Fusion B Classification Features Classification Fusion A Features features from other agents Basic movement forecasts from other agents Polynomial Approximation Sufficient Statistics Ensemble Techniques Model Fusion
21 Model trajectory as polynomial Movement Primitive Coefficients of Polynomial Approximation Forecast Trajectory using ANN Trajectory Forecast Feature-based fusion on polynomial coefficients Stefan Zernetsch; Sascha Kohnen; Michael Goldhammer; Konrad Doll Bernhard Sick, Trajectory Prediction of Cyclists Using a Physical Model and an Artificial Neural Network, Intelligent Vehicles Symposium (IV), 2016 IEEE
22 Least-squares polynomial approximation Robust against noise, independent of frequency Consistent abstract representation of sensor data Out-of-order fusion and missing data Efficient up- and downdating of polynomial approximation Orthogonal polynomial basis w = Φ x T Φ x 1 Φ x T y diagonal matrix Coefficients used as input to forecast intentions and trajectories Erich Fuchs; Thiemo Gruber; Jiri Nitschke; Bernhard Sick, Online Segmentation of Time Series Based on Polynomial Least-Squares Approximations, IEEE Transactions on Pattern Analysis and Machine Intelligence, vol. 32, no. 12, pp , Dec. 2010
23 Weighted polynomial regression Weighting criteria: Timeliness/ Time (Exponential attenuation) Uncertainty (Inverse) measurement models Error model Sensor type and wearing position Results to be published soon Outlier
24 Stefan Zernetsch; Sascha Kohnen; Michael Goldhammer; Konrad Doll Bernhard Sick, Trajectory Prediction of Cyclists Using a Physical Model and an Artificial Neural Network, Intelligent Vehicles Symposium (IV), 2016 IEEE M. Bieshaar, Cooperative Intention Detection of Vulnerable Road Users, in Organic Computing: Doctoral Dissertation Colloquium, Kassel University Press, to appear Erich Fuchs; Thiemo Gruber; Jiri Nitschke; Bernhard Sick, Online Segmentation of Time Series Based on Polynomial Least-Squares Approximations, IEEE Transactions on Pattern Analysis and Machine Intelligence, vol. 32, no. 12, pp , Dec S. Köhler, M. Goldhammer, K. Zindler, K. Doll and K. Dietmeyer, "Stereo-Vision-Based Pedestrian's Intention Detection in a Moving Vehicle," 2015 IEEE 18th International Conference on Intelligent Transportation Systems, Las Palmas, 2015, pp
25 N. Dalal und B. Triggs, Histograms of Oriented Gradients for Human Detection, IEEE Conference on Computer Vision and Pattern Recognition, pp , 2005 M. Goldhammer, K. Doll, U. Brunsmann, A. Gensler und B. Sick, Pedestrian s Trajectory Forecast in Public Traffic with Artificial Neural Networks, in Proceedings of the Nd International Conference on Pattern Recognition, Stockholm, Sweden, pp , 2014


26 Taken from (31 May 2016)
FPGA Implementation of a HOG-based Pedestrian Recognition System
 MPC Workshop Karlsruhe 10/7/2009 FPGA Implementation of a HOG-based Pedestrian Recognition System Sebastian Bauer sebastian.bauer@fh-aschaffenburg.de Laboratory for Pattern Recognition and Computational
MPC Workshop Karlsruhe 10/7/2009 FPGA Implementation of a HOG-based Pedestrian Recognition System Sebastian Bauer sebastian.bauer@fh-aschaffenburg.de Laboratory for Pattern Recognition and Computational
self-driving car technology introduction
 self-driving car technology introduction slide 1 Contents of this presentation 1. Motivation 2. Methods 2.1 road lane detection 2.2 collision avoidance 3. Summary 4. Future work slide 2 Motivation slide
self-driving car technology introduction slide 1 Contents of this presentation 1. Motivation 2. Methods 2.1 road lane detection 2.2 collision avoidance 3. Summary 4. Future work slide 2 Motivation slide
Towards Fully-automated Driving
 Towards Fully-automated Driving Challenges and Potential Solutions Dr. Gijs Dubbelman Mobile Perception Systems EE-SPS/VCA Mobile Perception Systems 6 PhDs, postdoc, project manager, software engineer,
Towards Fully-automated Driving Challenges and Potential Solutions Dr. Gijs Dubbelman Mobile Perception Systems EE-SPS/VCA Mobile Perception Systems 6 PhDs, postdoc, project manager, software engineer,
Shape of Gaussians as Feature Descriptors
 Shape of Gaussians as Feature Descriptors Liyu Gong, Tianjiang Wang and Fang Liu Intelligent and Distributed Computing Lab, School of Computer Science and Technology Huazhong University of Science and
Shape of Gaussians as Feature Descriptors Liyu Gong, Tianjiang Wang and Fang Liu Intelligent and Distributed Computing Lab, School of Computer Science and Technology Huazhong University of Science and
Visibility Estimation of Traffic Signals under Rainy Weather Conditions for Smart Driving Support
 2012 15th International IEEE Conference on Intelligent Transportation Systems Anchorage, Alaska, USA, September 16-19, 2012 Visibility Estimation of Traffic Signals under Rainy Weather Conditions for Smart
2012 15th International IEEE Conference on Intelligent Transportation Systems Anchorage, Alaska, USA, September 16-19, 2012 Visibility Estimation of Traffic Signals under Rainy Weather Conditions for Smart
A Study on Performance Analysis of V2V Communication Based AEB System Considering Road Friction at Slopes
 , pp. 71-80 http://dx.doi.org/10.14257/ijfgcn.2016.9.11.07 A Study on Performance Analysis of V2V Communication Based AEB System Considering Road Friction at Slopes Sangduck Jeon 1, Jungeun Lee 1 and Byeongwoo
, pp. 71-80 http://dx.doi.org/10.14257/ijfgcn.2016.9.11.07 A Study on Performance Analysis of V2V Communication Based AEB System Considering Road Friction at Slopes Sangduck Jeon 1, Jungeun Lee 1 and Byeongwoo
Two-stage Pedestrian Detection Based on Multiple Features and Machine Learning
 38 3 Vol. 38, No. 3 2012 3 ACTA AUTOMATICA SINICA March, 2012 1 1 1, (Adaboost) (Support vector machine, SVM). (Four direction features, FDF) GAB (Gentle Adaboost) (Entropy-histograms of oriented gradients,
38 3 Vol. 38, No. 3 2012 3 ACTA AUTOMATICA SINICA March, 2012 1 1 1, (Adaboost) (Support vector machine, SVM). (Four direction features, FDF) GAB (Gentle Adaboost) (Entropy-histograms of oriented gradients,
Tracking and Identification of Multiple targets
 Tracking and Identification of Multiple targets Samir Hachour, François Delmotte, Eric Lefèvre, David Mercier Laboratoire de Génie Informatique et d'automatique de l'artois, EA 3926 LGI2A first name.last
Tracking and Identification of Multiple targets Samir Hachour, François Delmotte, Eric Lefèvre, David Mercier Laboratoire de Génie Informatique et d'automatique de l'artois, EA 3926 LGI2A first name.last
JOINT INTERPRETATION OF ON-BOARD VISION AND STATIC GPS CARTOGRAPHY FOR DETERMINATION OF CORRECT SPEED LIMIT
 JOINT INTERPRETATION OF ON-BOARD VISION AND STATIC GPS CARTOGRAPHY FOR DETERMINATION OF CORRECT SPEED LIMIT Alexandre Bargeton, Fabien Moutarde, Fawzi Nashashibi and Anne-Sophie Puthon Robotics Lab (CAOR),
JOINT INTERPRETATION OF ON-BOARD VISION AND STATIC GPS CARTOGRAPHY FOR DETERMINATION OF CORRECT SPEED LIMIT Alexandre Bargeton, Fabien Moutarde, Fawzi Nashashibi and Anne-Sophie Puthon Robotics Lab (CAOR),
A Novel Activity Detection Method
 A Novel Activity Detection Method Gismy George P.G. Student, Department of ECE, Ilahia College of,muvattupuzha, Kerala, India ABSTRACT: This paper presents an approach for activity state recognition of
A Novel Activity Detection Method Gismy George P.G. Student, Department of ECE, Ilahia College of,muvattupuzha, Kerala, India ABSTRACT: This paper presents an approach for activity state recognition of
Overtaking & Receding Vehicle Detection for Driver Assistance and Naturalistic Driving Studies
 Overtaking & Receding Vehicle Detection for Driver Assistance and Naturalistic Driving Studies Ravi Kumar Satzoda and Mohan M. Trivedi Abstract Although on-road vehicle detection is a wellresearched area,
Overtaking & Receding Vehicle Detection for Driver Assistance and Naturalistic Driving Studies Ravi Kumar Satzoda and Mohan M. Trivedi Abstract Although on-road vehicle detection is a wellresearched area,
Context-based Reasoning in Ambient Intelligence - CoReAmI -
 Context-based in Ambient Intelligence - CoReAmI - Hristijan Gjoreski Department of Intelligent Systems, Jožef Stefan Institute Supervisor: Prof. Dr. Matjaž Gams Co-supervisor: Dr. Mitja Luštrek Background
Context-based in Ambient Intelligence - CoReAmI - Hristijan Gjoreski Department of Intelligent Systems, Jožef Stefan Institute Supervisor: Prof. Dr. Matjaž Gams Co-supervisor: Dr. Mitja Luštrek Background
Information fusion for scene understanding
 Information fusion for scene understanding Philippe XU CNRS, HEUDIASYC University of Technology of Compiègne France Franck DAVOINE Thierry DENOEUX Context of the PhD thesis Sino-French research collaboration
Information fusion for scene understanding Philippe XU CNRS, HEUDIASYC University of Technology of Compiègne France Franck DAVOINE Thierry DENOEUX Context of the PhD thesis Sino-French research collaboration
SUMMARY. ) t, UNIT. Constant velocity represents uniform motion. Acceleration causes a change in velocity.
 t, UNIT. Constant velocity represents uniform motion. Acceleration causes a change in velocity.") UNIT A SUMMARY KEY CONCEPTS CHAPTER SUMMARY 1 Constant velocity represents uniform motion. Distance and Displacement Position-time graphs Average speed and average velocity Positive, negative, and zero
UNIT A SUMMARY KEY CONCEPTS CHAPTER SUMMARY 1 Constant velocity represents uniform motion. Distance and Displacement Position-time graphs Average speed and average velocity Positive, negative, and zero
Analysis of Forward Collision Warning System. Based on Vehicle-mounted Sensors on. Roads with an Up-Down Road gradient
 Contemporary Engineering Sciences, Vol. 7, 2014, no. 22, 1139-1145 HIKARI Ltd, www.m-hikari.com http://dx.doi.org/10.12988/ces.2014.49142 Analysis of Forward Collision Warning System Based on Vehicle-mounted
Contemporary Engineering Sciences, Vol. 7, 2014, no. 22, 1139-1145 HIKARI Ltd, www.m-hikari.com http://dx.doi.org/10.12988/ces.2014.49142 Analysis of Forward Collision Warning System Based on Vehicle-mounted
Real-Time Travel Time Prediction Using Multi-level k-nearest Neighbor Algorithm and Data Fusion Method
 1861 Real-Time Travel Time Prediction Using Multi-level k-nearest Neighbor Algorithm and Data Fusion Method Sehyun Tak 1, Sunghoon Kim 2, Kiate Jang 3 and Hwasoo Yeo 4 1 Smart Transportation System Laboratory,
1861 Real-Time Travel Time Prediction Using Multi-level k-nearest Neighbor Algorithm and Data Fusion Method Sehyun Tak 1, Sunghoon Kim 2, Kiate Jang 3 and Hwasoo Yeo 4 1 Smart Transportation System Laboratory,
Inter-Vehicle Safety by Transponder Based Localization
 Inter-Vehicle Safety by Transponder Based Localization Fahrzeug-Fahrzeug-Sicherheit durch transponderbasierte Ortung Erich Lankes Daimler AG Phases of Sensorrevolution Ko-TAG Phase I Monitoring of vehicle
Inter-Vehicle Safety by Transponder Based Localization Fahrzeug-Fahrzeug-Sicherheit durch transponderbasierte Ortung Erich Lankes Daimler AG Phases of Sensorrevolution Ko-TAG Phase I Monitoring of vehicle
Probabilistic Structure from Sound and Probabilistic Sound Source Localization
 Probabilistic Structure from Sound and Probabilistic Sound Source Localization Chi-Hao Lin and Chieh-Chih Wang Department of Computer Science and Information Engineering Graduate Institute of Networking
Probabilistic Structure from Sound and Probabilistic Sound Source Localization Chi-Hao Lin and Chieh-Chih Wang Department of Computer Science and Information Engineering Graduate Institute of Networking
Discriminative part-based models. Many slides based on P. Felzenszwalb
 More sliding window detection: ti Discriminative part-based models Many slides based on P. Felzenszwalb Challenge: Generic object detection Pedestrian detection Features: Histograms of oriented gradients
More sliding window detection: ti Discriminative part-based models Many slides based on P. Felzenszwalb Challenge: Generic object detection Pedestrian detection Features: Histograms of oriented gradients
Neural Networks biological neuron artificial neuron 1
 Neural Networks biological neuron artificial neuron 1 A two-layer neural network Output layer (activation represents classification) Weighted connections Hidden layer ( internal representation ) Input
Neural Networks biological neuron artificial neuron 1 A two-layer neural network Output layer (activation represents classification) Weighted connections Hidden layer ( internal representation ) Input
Affine Structure From Motion
 EECS43-Advanced Computer Vision Notes Series 9 Affine Structure From Motion Ying Wu Electrical Engineering & Computer Science Northwestern University Evanston, IL 68 yingwu@ece.northwestern.edu Contents
EECS43-Advanced Computer Vision Notes Series 9 Affine Structure From Motion Ying Wu Electrical Engineering & Computer Science Northwestern University Evanston, IL 68 yingwu@ece.northwestern.edu Contents
Goal-Directed Pedestrian Prediction
 Goal-Directed Pedestrian Prediction Eike Rehder Institute for Measurement and Control Systems Karlsruhe, Germany eike.rehder@kit.edu Horst Kloeden BMW Forschung und Technik GmbH Munich, Germany horst.kloeden@bmw.de
Goal-Directed Pedestrian Prediction Eike Rehder Institute for Measurement and Control Systems Karlsruhe, Germany eike.rehder@kit.edu Horst Kloeden BMW Forschung und Technik GmbH Munich, Germany horst.kloeden@bmw.de
CS4495/6495 Introduction to Computer Vision. 8C-L3 Support Vector Machines
 CS4495/6495 Introduction to Computer Vision 8C-L3 Support Vector Machines Discriminative classifiers Discriminative classifiers find a division (surface) in feature space that separates the classes Several
CS4495/6495 Introduction to Computer Vision 8C-L3 Support Vector Machines Discriminative classifiers Discriminative classifiers find a division (surface) in feature space that separates the classes Several
Introduction to Natural Computation. Lecture 9. Multilayer Perceptrons and Backpropagation. Peter Lewis
 Introduction to Natural Computation Lecture 9 Multilayer Perceptrons and Backpropagation Peter Lewis 1 / 25 Overview of the Lecture Why multilayer perceptrons? Some applications of multilayer perceptrons.
Introduction to Natural Computation Lecture 9 Multilayer Perceptrons and Backpropagation Peter Lewis 1 / 25 Overview of the Lecture Why multilayer perceptrons? Some applications of multilayer perceptrons.
Collision warning system based on probability density functions van den Broek, T.H.A.; Ploeg, J.
 Collision warning system based on probability density functions van den Broek, T.H.A.; Ploeg, J. Published in: Proceedings of the 7th International Workshop on Intelligent Transportation WIT 2010, 23-24
Collision warning system based on probability density functions van den Broek, T.H.A.; Ploeg, J. Published in: Proceedings of the 7th International Workshop on Intelligent Transportation WIT 2010, 23-24
1 INTRODUCTION 2 PROBLEM DEFINITION
 Autonomous cruise control with cut-in target vehicle detection Ashwin Carvalho, Alek Williams, Stéphanie Lefèvre & Francesco Borrelli Department of Mechanical Engineering University of California Berkeley,
Autonomous cruise control with cut-in target vehicle detection Ashwin Carvalho, Alek Williams, Stéphanie Lefèvre & Francesco Borrelli Department of Mechanical Engineering University of California Berkeley,
HELLA AGLAIA MOBILE VISION GMBH
 HELLA AGLAIA MOBILE VISION GMBH DRIVING SOFTWARE INNOVATION H E L L A A g l a i a M o b i l e V i s i o n G m b H I C o m p a n y P r e s e n t a t i o n I D e l h i, A u g u s t 2 0 1 7 11 Hella Aglaia
HELLA AGLAIA MOBILE VISION GMBH DRIVING SOFTWARE INNOVATION H E L L A A g l a i a M o b i l e V i s i o n G m b H I C o m p a n y P r e s e n t a t i o n I D e l h i, A u g u s t 2 0 1 7 11 Hella Aglaia
Track-to-track Fusion for Multi-target Tracking Using Asynchronous and Delayed Data
 Track-to-track Fusion for Multi-target Tracking Using Asynchronous and Delayed Data Master s thesis in Systems, Control and Mechatronics ALEXANDER BERG ANDREAS KÄLL Department of Signals and Systems CHALMERS
Track-to-track Fusion for Multi-target Tracking Using Asynchronous and Delayed Data Master s thesis in Systems, Control and Mechatronics ALEXANDER BERG ANDREAS KÄLL Department of Signals and Systems CHALMERS
A Probabilistic Relational Model for Characterizing Situations in Dynamic Multi-Agent Systems
 A Probabilistic Relational Model for Characterizing Situations in Dynamic Multi-Agent Systems Daniel Meyer-Delius 1, Christian Plagemann 1, Georg von Wichert 2, Wendelin Feiten 2, Gisbert Lawitzky 2, and
A Probabilistic Relational Model for Characterizing Situations in Dynamic Multi-Agent Systems Daniel Meyer-Delius 1, Christian Plagemann 1, Georg von Wichert 2, Wendelin Feiten 2, Gisbert Lawitzky 2, and
Multi-Sensor Multi-Target Tracking - Strategies for Events that Become Invisible
 Multi-Sensor Multi-Target Tracking - Strategies for Events that Become Invisible D.Hutber and Z.Zhang INRIA, 2004 Route des Lucioles, B.P.93, 06902 Sophia Antipolis Cedex, France. dhutber@sophia.inria.fr,
Multi-Sensor Multi-Target Tracking - Strategies for Events that Become Invisible D.Hutber and Z.Zhang INRIA, 2004 Route des Lucioles, B.P.93, 06902 Sophia Antipolis Cedex, France. dhutber@sophia.inria.fr,
On Motion Models for Target Tracking in Automotive Applications
 On Motion Models for Target Tracking in Automotive Applications Markus Bühren and Bin Yang Chair of System Theory and Signal Processing University of Stuttgart, Germany www.lss.uni-stuttgart.de Abstract
On Motion Models for Target Tracking in Automotive Applications Markus Bühren and Bin Yang Chair of System Theory and Signal Processing University of Stuttgart, Germany www.lss.uni-stuttgart.de Abstract
Available online Journal of Scientific and Engineering Research, 2017, 4(4): Research Article
: Research Article") Available online www.jsaer.com, 2017, 4(4):137-142 Research Article ISSN: 2394-2630 CODEN(USA): JSERBR A Qualitative Examination of the Composition of the Cooperative Vehicles Çağlar Koşun 1, Çağatay Kök
Available online www.jsaer.com, 2017, 4(4):137-142 Research Article ISSN: 2394-2630 CODEN(USA): JSERBR A Qualitative Examination of the Composition of the Cooperative Vehicles Çağlar Koşun 1, Çağatay Kök
A Probabilistic Representation for Dynamic Movement Primitives
 A Probabilistic Representation for Dynamic Movement Primitives Franziska Meier,2 and Stefan Schaal,2 CLMC Lab, University of Southern California, Los Angeles, USA 2 Autonomous Motion Department, MPI for
A Probabilistic Representation for Dynamic Movement Primitives Franziska Meier,2 and Stefan Schaal,2 CLMC Lab, University of Southern California, Los Angeles, USA 2 Autonomous Motion Department, MPI for
Tracking Human Heads Based on Interaction between Hypotheses with Certainty
 Proc. of The 13th Scandinavian Conference on Image Analysis (SCIA2003), (J. Bigun and T. Gustavsson eds.: Image Analysis, LNCS Vol. 2749, Springer), pp. 617 624, 2003. Tracking Human Heads Based on Interaction
Proc. of The 13th Scandinavian Conference on Image Analysis (SCIA2003), (J. Bigun and T. Gustavsson eds.: Image Analysis, LNCS Vol. 2749, Springer), pp. 617 624, 2003. Tracking Human Heads Based on Interaction
Reservoir Computing and Echo State Networks
 An Introduction to: Reservoir Computing and Echo State Networks Claudio Gallicchio gallicch@di.unipi.it Outline Focus: Supervised learning in domain of sequences Recurrent Neural networks for supervised
An Introduction to: Reservoir Computing and Echo State Networks Claudio Gallicchio gallicch@di.unipi.it Outline Focus: Supervised learning in domain of sequences Recurrent Neural networks for supervised
Engineering Part IIB: Module 4F10 Statistical Pattern Processing Lecture 6: Multi-Layer Perceptrons I
 Engineering Part IIB: Module 4F10 Statistical Pattern Processing Lecture 6: Multi-Layer Perceptrons I Phil Woodland: pcw@eng.cam.ac.uk Michaelmas 2012 Engineering Part IIB: Module 4F10 Introduction In
Engineering Part IIB: Module 4F10 Statistical Pattern Processing Lecture 6: Multi-Layer Perceptrons I Phil Woodland: pcw@eng.cam.ac.uk Michaelmas 2012 Engineering Part IIB: Module 4F10 Introduction In
Vehicle Tracking and Classification via 3D Geometries for Intelligent Transportation Systems
 University of Central Florida Electronic Theses and Dissertations Doctoral Dissertation (Open Access) Vehicle Tracking and Classification via 3D Geometries for Intelligent Transportation Systems 2015 William
University of Central Florida Electronic Theses and Dissertations Doctoral Dissertation (Open Access) Vehicle Tracking and Classification via 3D Geometries for Intelligent Transportation Systems 2015 William
Comparison of two non-linear model-based control strategies for autonomous vehicles
 Comparison of two non-linear model-based control strategies for autonomous vehicles E. Alcala*, L. Sellart**, V. Puig*, J. Quevedo*, J. Saludes*, D. Vázquez** and A. López** * Supervision & Security of
Comparison of two non-linear model-based control strategies for autonomous vehicles E. Alcala*, L. Sellart**, V. Puig*, J. Quevedo*, J. Saludes*, D. Vázquez** and A. López** * Supervision & Security of
Multimodal context analysis and prediction
 Multimodal context analysis and prediction Valeria Tomaselli (valeria.tomaselli@st.com) Sebastiano Battiato Giovanni Maria Farinella Tiziana Rotondo (PhD student) Outline 2 Context analysis vs prediction
Multimodal context analysis and prediction Valeria Tomaselli (valeria.tomaselli@st.com) Sebastiano Battiato Giovanni Maria Farinella Tiziana Rotondo (PhD student) Outline 2 Context analysis vs prediction
UNSUPERVISED LEARNING
 UNSUPERVISED LEARNING Topics Layer-wise (unsupervised) pre-training Restricted Boltzmann Machines Auto-encoders LAYER-WISE (UNSUPERVISED) PRE-TRAINING Breakthrough in 2006 Layer-wise (unsupervised) pre-training
UNSUPERVISED LEARNING Topics Layer-wise (unsupervised) pre-training Restricted Boltzmann Machines Auto-encoders LAYER-WISE (UNSUPERVISED) PRE-TRAINING Breakthrough in 2006 Layer-wise (unsupervised) pre-training
Probabilistic Graphical Models for Image Analysis - Lecture 1
 Probabilistic Graphical Models for Image Analysis - Lecture 1 Alexey Gronskiy, Stefan Bauer 21 September 2018 Max Planck ETH Center for Learning Systems Overview 1. Motivation - Why Graphical Models 2.
Probabilistic Graphical Models for Image Analysis - Lecture 1 Alexey Gronskiy, Stefan Bauer 21 September 2018 Max Planck ETH Center for Learning Systems Overview 1. Motivation - Why Graphical Models 2.
Robust Motion Segmentation by Spectral Clustering
 Robust Motion Segmentation by Spectral Clustering Hongbin Wang and Phil F. Culverhouse Centre for Robotics Intelligent Systems University of Plymouth Plymouth, PL4 8AA, UK {hongbin.wang, P.Culverhouse}@plymouth.ac.uk
Robust Motion Segmentation by Spectral Clustering Hongbin Wang and Phil F. Culverhouse Centre for Robotics Intelligent Systems University of Plymouth Plymouth, PL4 8AA, UK {hongbin.wang, P.Culverhouse}@plymouth.ac.uk
Innovation in mapping and photogrammetry at the Survey of Israel
 16, October, 2017 Innovation in mapping and photogrammetry at the Survey of Israel Yaron Felus and Ronen Regev Contents Why HD mapping? Government requirements Mapping regulations o Quality requirements
16, October, 2017 Innovation in mapping and photogrammetry at the Survey of Israel Yaron Felus and Ronen Regev Contents Why HD mapping? Government requirements Mapping regulations o Quality requirements
Road Friction Estimation for Connected Vehicles using Supervised Machine Learning
 Road Friction Estimation for Connected Vehicles using Supervised Machine Learning Ghazaleh Panahandeh, Erik Ek, Nasser Mohammadiha Zenuity AB, Chalmers University of Technology arxiv:1709.05379v1 [cs.lg]
Road Friction Estimation for Connected Vehicles using Supervised Machine Learning Ghazaleh Panahandeh, Erik Ek, Nasser Mohammadiha Zenuity AB, Chalmers University of Technology arxiv:1709.05379v1 [cs.lg]
A Probabilistic Relational Model for Characterizing Situations in Dynamic Multi-Agent Systems
 A Probabilistic Relational Model for Characterizing Situations in Dynamic Multi-Agent Systems Daniel Meyer-Delius 1, Christian Plagemann 1, Georg von Wichert 2, Wendelin Feiten 2, Gisbert Lawitzky 2, and
A Probabilistic Relational Model for Characterizing Situations in Dynamic Multi-Agent Systems Daniel Meyer-Delius 1, Christian Plagemann 1, Georg von Wichert 2, Wendelin Feiten 2, Gisbert Lawitzky 2, and
been developed to calibrate for systematic errors of a two wheel robot. This method has been used by other authors (Chong, 1997). Goel, Roumeliotis an
. Goel, Roumeliotis an") MODELING AND ESTIMATING THE ODOMETRY ERROR OF A MOBILE ROBOT Agostino Martinelli Λ Λ Dipartimento di Informatica, Sistemi e Produzione, Universit a degli Studi di Roma Tor Vergata", Via di Tor Vergata,
MODELING AND ESTIMATING THE ODOMETRY ERROR OF A MOBILE ROBOT Agostino Martinelli Λ Λ Dipartimento di Informatica, Sistemi e Produzione, Universit a degli Studi di Roma Tor Vergata", Via di Tor Vergata,
Mutual Information Based Data Selection in Gaussian Processes for People Tracking
 Proceedings of Australasian Conference on Robotics and Automation, 3-5 Dec 01, Victoria University of Wellington, New Zealand. Mutual Information Based Data Selection in Gaussian Processes for People Tracking
Proceedings of Australasian Conference on Robotics and Automation, 3-5 Dec 01, Victoria University of Wellington, New Zealand. Mutual Information Based Data Selection in Gaussian Processes for People Tracking
Towards airborne seismic. Thomas Rapstine & Paul Sava
 Towards airborne seismic Thomas Rapstine & Paul Sava Research goal measure a strong motion signal from an airborne platform 2 Proposed method Monitor ground motion from an UAV using cameras Unmanned Aerial
Towards airborne seismic Thomas Rapstine & Paul Sava Research goal measure a strong motion signal from an airborne platform 2 Proposed method Monitor ground motion from an UAV using cameras Unmanned Aerial
We provide two sections from the book (in preparation) Intelligent and Autonomous Road Vehicles, by Ozguner, Acarman and Redmill.
 Intelligent and Autonomous Road Vehicles, by Ozguner, Acarman and Redmill.") We provide two sections from the book (in preparation) Intelligent and Autonomous Road Vehicles, by Ozguner, Acarman and Redmill. 2.3.2. Steering control using point mass model: Open loop commands We consider
We provide two sections from the book (in preparation) Intelligent and Autonomous Road Vehicles, by Ozguner, Acarman and Redmill. 2.3.2. Steering control using point mass model: Open loop commands We consider
IMM vehicle tracking for traffic jam situations on highways
 IMM vehicle tracking for traffic jam situations on highways Nico Kaempchen, Klaus C.J. Dietmayer University of Ulm Dept. of Measurement, Control and Microtechnology Albert Einstein Allee 4 D 898 Ulm Germany
IMM vehicle tracking for traffic jam situations on highways Nico Kaempchen, Klaus C.J. Dietmayer University of Ulm Dept. of Measurement, Control and Microtechnology Albert Einstein Allee 4 D 898 Ulm Germany
2D Image Processing. Bayes filter implementation: Kalman filter
 2D Image Processing Bayes filter implementation: Kalman filter Prof. Didier Stricker Dr. Gabriele Bleser Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche
2D Image Processing Bayes filter implementation: Kalman filter Prof. Didier Stricker Dr. Gabriele Bleser Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche
Unit 8: Introduction to neural networks. Perceptrons
 Unit 8: Introduction to neural networks. Perceptrons D. Balbontín Noval F. J. Martín Mateos J. L. Ruiz Reina A. Riscos Núñez Departamento de Ciencias de la Computación e Inteligencia Artificial Universidad
Unit 8: Introduction to neural networks. Perceptrons D. Balbontín Noval F. J. Martín Mateos J. L. Ruiz Reina A. Riscos Núñez Departamento de Ciencias de la Computación e Inteligencia Artificial Universidad
Risk Assessment of Pedestrian Accident Area Using Spatial Analysis and Deep Learning
 Risk Assessment of Pedestrian Accident Area Using Spatial Analysis and Deep Learning Ilyoung Hong*, Hanseung Choi, Songpyo Hong Department of GIS Engineering, Namseoul University, Republic of Korea. *
Risk Assessment of Pedestrian Accident Area Using Spatial Analysis and Deep Learning Ilyoung Hong*, Hanseung Choi, Songpyo Hong Department of GIS Engineering, Namseoul University, Republic of Korea. *
Real-time image-based parking occupancy detection using deep learning. Debaditya Acharya, Weilin Yan & Kourosh Khoshelham The University of Melbourne
 Real-time image-based parking occupancy detection using deep learning Debaditya Acharya, Weilin Yan & Kourosh Khoshelham The University of Melbourne Slide 1/20 Prologue People spend on Does average that
Real-time image-based parking occupancy detection using deep learning Debaditya Acharya, Weilin Yan & Kourosh Khoshelham The University of Melbourne Slide 1/20 Prologue People spend on Does average that
2D Image Processing. Bayes filter implementation: Kalman filter
 2D Image Processing Bayes filter implementation: Kalman filter Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de
2D Image Processing Bayes filter implementation: Kalman filter Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de
DOUBLE DEGREE MASTER PROGRAM
 DOUBLE DEGREE MASTER PROGRAM in Engineering Science/Mechanical Engineering at Warsaw University of Technology and Technical University Berlin (WUT/TUB) I SEMESTER COURSE PROGRAM WUT TUB SUBJECT SUBJECT
DOUBLE DEGREE MASTER PROGRAM in Engineering Science/Mechanical Engineering at Warsaw University of Technology and Technical University Berlin (WUT/TUB) I SEMESTER COURSE PROGRAM WUT TUB SUBJECT SUBJECT
Neutron inverse kinetics via Gaussian Processes
 Neutron inverse kinetics via Gaussian Processes P. Picca Politecnico di Torino, Torino, Italy R. Furfaro University of Arizona, Tucson, Arizona Outline Introduction Review of inverse kinetics techniques
Neutron inverse kinetics via Gaussian Processes P. Picca Politecnico di Torino, Torino, Italy R. Furfaro University of Arizona, Tucson, Arizona Outline Introduction Review of inverse kinetics techniques
Cooperative Control and Mobile Sensor Networks
 Cooperative Control and Mobile Sensor Networks Cooperative Control, Part I, A-C Naomi Ehrich Leonard Mechanical and Aerospace Engineering Princeton University and Electrical Systems and Automation University
Cooperative Control and Mobile Sensor Networks Cooperative Control, Part I, A-C Naomi Ehrich Leonard Mechanical and Aerospace Engineering Princeton University and Electrical Systems and Automation University
suppressing traffic flow instabilities
 suppressing traffic flow instabilities S S VF VC VL D D Berthold K.P. Horn Traffic flow instabilities waste energy: At high densities traffic flow becomes unstable Traffic acts as if it was a dilatant
suppressing traffic flow instabilities S S VF VC VL D D Berthold K.P. Horn Traffic flow instabilities waste energy: At high densities traffic flow becomes unstable Traffic acts as if it was a dilatant
Assessing the uncertainty in micro-simulation model outputs
 Assessing the uncertainty in micro-simulation model outputs S. Zhu 1 and L. Ferreira 2 1 School of Civil Engineering, Faculty of Engineering, Architecture and Information Technology, The University of
Assessing the uncertainty in micro-simulation model outputs S. Zhu 1 and L. Ferreira 2 1 School of Civil Engineering, Faculty of Engineering, Architecture and Information Technology, The University of
Electric Load Forecasting Using Wavelet Transform and Extreme Learning Machine
 Electric Load Forecasting Using Wavelet Transform and Extreme Learning Machine Song Li 1, Peng Wang 1 and Lalit Goel 1 1 School of Electrical and Electronic Engineering Nanyang Technological University
Electric Load Forecasting Using Wavelet Transform and Extreme Learning Machine Song Li 1, Peng Wang 1 and Lalit Goel 1 1 School of Electrical and Electronic Engineering Nanyang Technological University
A Continuous Topography Approach for Agent Based Traffic Simulation, Lane Changing Model*
 Jurnal AL-AZHAR INDONESIA SERI SAINS DAN TEKNOLOGI, Vol. 2, No. 1, Maret 2013 35 A Continuous Topography Approach for Agent Based Traffic Simulation, Lane Changing Model* Ade Jamal Department of Informatics,
Jurnal AL-AZHAR INDONESIA SERI SAINS DAN TEKNOLOGI, Vol. 2, No. 1, Maret 2013 35 A Continuous Topography Approach for Agent Based Traffic Simulation, Lane Changing Model* Ade Jamal Department of Informatics,
CS 343: Artificial Intelligence
 CS 343: Artificial Intelligence Deep Learning Prof. Scott Niekum The University of Texas at Austin [These slides based on those of Dan Klein, Pieter Abbeel, Anca Dragan for CS188 Intro to AI at UC Berkeley.
CS 343: Artificial Intelligence Deep Learning Prof. Scott Niekum The University of Texas at Austin [These slides based on those of Dan Klein, Pieter Abbeel, Anca Dragan for CS188 Intro to AI at UC Berkeley.
Announcements. CS 188: Artificial Intelligence Fall Markov Models. Example: Markov Chain. Mini-Forward Algorithm. Example
 CS 88: Artificial Intelligence Fall 29 Lecture 9: Hidden Markov Models /3/29 Announcements Written 3 is up! Due on /2 (i.e. under two weeks) Project 4 up very soon! Due on /9 (i.e. a little over two weeks)
CS 88: Artificial Intelligence Fall 29 Lecture 9: Hidden Markov Models /3/29 Announcements Written 3 is up! Due on /2 (i.e. under two weeks) Project 4 up very soon! Due on /9 (i.e. a little over two weeks)
Non-Linearity. CS 188: Artificial Intelligence. Non-Linear Separators. Non-Linear Separators. Deep Learning I
 Non-Linearity CS 188: Artificial Intelligence Deep Learning I Instructors: Pieter Abbeel & Anca Dragan --- University of California, Berkeley [These slides were created by Dan Klein, Pieter Abbeel, Anca
Non-Linearity CS 188: Artificial Intelligence Deep Learning I Instructors: Pieter Abbeel & Anca Dragan --- University of California, Berkeley [These slides were created by Dan Klein, Pieter Abbeel, Anca
DISCRIMINATIVE DECORELATION FOR CLUSTERING AND CLASSIFICATION
 DISCRIMINATIVE DECORELATION FOR CLUSTERING AND CLASSIFICATION ECCV 12 Bharath Hariharan, Jitandra Malik, and Deva Ramanan MOTIVATION State-of-the-art Object Detection HOG Linear SVM Dalal&Triggs Histograms
DISCRIMINATIVE DECORELATION FOR CLUSTERING AND CLASSIFICATION ECCV 12 Bharath Hariharan, Jitandra Malik, and Deva Ramanan MOTIVATION State-of-the-art Object Detection HOG Linear SVM Dalal&Triggs Histograms
The stopping distance of a car is the sum of the thinking distance and the braking distance.
 The stopping distance of a car is the sum of the thinking distance and the braking distance. The table below shows how the thinking distance and braking distance vary with speed. Speed in m / s Thinking
The stopping distance of a car is the sum of the thinking distance and the braking distance. The table below shows how the thinking distance and braking distance vary with speed. Speed in m / s Thinking
Linear Regression In God we trust, all others bring data. William Edwards Deming
 Linear Regression ddebarr@uw.edu 2017-01-19 In God we trust, all others bring data. William Edwards Deming Course Outline 1. Introduction to Statistical Learning 2. Linear Regression 3. Classification
Linear Regression ddebarr@uw.edu 2017-01-19 In God we trust, all others bring data. William Edwards Deming Course Outline 1. Introduction to Statistical Learning 2. Linear Regression 3. Classification
Trajectory tracking & Path-following control
 Cooperative Control of Multiple Robotic Vehicles: Theory and Practice Trajectory tracking & Path-following control EECI Graduate School on Control Supélec, Feb. 21-25, 2011 A word about T Tracking and
Cooperative Control of Multiple Robotic Vehicles: Theory and Practice Trajectory tracking & Path-following control EECI Graduate School on Control Supélec, Feb. 21-25, 2011 A word about T Tracking and
2D Image Processing (Extended) Kalman and particle filter
 Kalman and particle filter") 2D Image Processing (Extended) Kalman and particle filter Prof. Didier Stricker Dr. Gabriele Bleser Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz
2D Image Processing (Extended) Kalman and particle filter Prof. Didier Stricker Dr. Gabriele Bleser Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz
The Multiple Model Labeled Multi-Bernoulli Filter
 18th International Conference on Information Fusion Washington, DC - July 6-9, 215 The Multiple Model Labeled Multi-ernoulli Filter Stephan Reuter, Alexander Scheel, Klaus Dietmayer Institute of Measurement,
18th International Conference on Information Fusion Washington, DC - July 6-9, 215 The Multiple Model Labeled Multi-ernoulli Filter Stephan Reuter, Alexander Scheel, Klaus Dietmayer Institute of Measurement,
Advanced Adaptive Cruise Control Based on Collision Risk Assessment
 Advanced Adaptive Cruise Control Based on Collision Risk Assessment Hanwool Woo 1, Yonghoon Ji 2, Yusuke Tamura 1, Yasuhide Kuroda 3, Takashi Sugano 4, Yasunori Yamamoto 4, Atsushi Yamashita 1, and Hajime
Advanced Adaptive Cruise Control Based on Collision Risk Assessment Hanwool Woo 1, Yonghoon Ji 2, Yusuke Tamura 1, Yasuhide Kuroda 3, Takashi Sugano 4, Yasunori Yamamoto 4, Atsushi Yamashita 1, and Hajime
Spatio-Temporal Analytics of Network Data
 Spatio-Temporal Analytics of Network Data Tao Cheng, James Haworth SpaceTimeLab Team University College London http://www.ucl.ac.uk/spacetimelab GIS Ostrava 2014 - Geoinformatics for Intelligent Transportation
Spatio-Temporal Analytics of Network Data Tao Cheng, James Haworth SpaceTimeLab Team University College London http://www.ucl.ac.uk/spacetimelab GIS Ostrava 2014 - Geoinformatics for Intelligent Transportation
Linear & nonlinear classifiers
 Linear & nonlinear classifiers Machine Learning Hamid Beigy Sharif University of Technology Fall 1396 Hamid Beigy (Sharif University of Technology) Linear & nonlinear classifiers Fall 1396 1 / 44 Table
Linear & nonlinear classifiers Machine Learning Hamid Beigy Sharif University of Technology Fall 1396 Hamid Beigy (Sharif University of Technology) Linear & nonlinear classifiers Fall 1396 1 / 44 Table
Lecture 10. Neural networks and optimization. Machine Learning and Data Mining November Nando de Freitas UBC. Nonlinear Supervised Learning
 Lecture 0 Neural networks and optimization Machine Learning and Data Mining November 2009 UBC Gradient Searching for a good solution can be interpreted as looking for a minimum of some error (loss) function
Lecture 0 Neural networks and optimization Machine Learning and Data Mining November 2009 UBC Gradient Searching for a good solution can be interpreted as looking for a minimum of some error (loss) function
Automotive Radar and Radar Based Perception for Driverless Cars
 Automotive Radar and Radar Based Perception for Driverless Cars Radar Symposium February 13, 2017 Auditorium, Ben-Gurion University of the Negev Dr. Juergen Dickmann, DAIMLER AG, Ulm, Germany 1 Radar Team
Automotive Radar and Radar Based Perception for Driverless Cars Radar Symposium February 13, 2017 Auditorium, Ben-Gurion University of the Negev Dr. Juergen Dickmann, DAIMLER AG, Ulm, Germany 1 Radar Team
Chapter 05: Hidden Markov Models
 LEARNING AND INFERENCE IN GRAPHICAL MODELS Chapter 05: Hidden Markov Models Dr. Martin Lauer University of Freiburg Machine Learning Lab Karlsruhe Institute of Technology Institute of Measurement and Control
LEARNING AND INFERENCE IN GRAPHICAL MODELS Chapter 05: Hidden Markov Models Dr. Martin Lauer University of Freiburg Machine Learning Lab Karlsruhe Institute of Technology Institute of Measurement and Control
Online Estimation of Discrete Densities using Classifier Chains
 Online Estimation of Discrete Densities using Classifier Chains Michael Geilke 1 and Eibe Frank 2 and Stefan Kramer 1 1 Johannes Gutenberg-Universtität Mainz, Germany {geilke,kramer}@informatik.uni-mainz.de
Online Estimation of Discrete Densities using Classifier Chains Michael Geilke 1 and Eibe Frank 2 and Stefan Kramer 1 1 Johannes Gutenberg-Universtität Mainz, Germany {geilke,kramer}@informatik.uni-mainz.de
Artificial Neural Networks (ANN) Xiaogang Su, Ph.D. Department of Mathematical Science University of Texas at El Paso
 Xiaogang Su, Ph.D. Department of Mathematical Science University of Texas at El Paso") Artificial Neural Networks (ANN) Xiaogang Su, Ph.D. Department of Mathematical Science University of Texas at El Paso xsu@utep.edu Fall, 2018 Outline Introduction A Brief History ANN Architecture Terminology
Artificial Neural Networks (ANN) Xiaogang Su, Ph.D. Department of Mathematical Science University of Texas at El Paso xsu@utep.edu Fall, 2018 Outline Introduction A Brief History ANN Architecture Terminology
38 1 Vol. 38, No ACTA AUTOMATICA SINICA January, Bag-of-phrases.. Image Representation Using Bag-of-phrases
 38 1 Vol. 38, No. 1 2012 1 ACTA AUTOMATICA SINICA January, 2012 Bag-of-phrases 1, 2 1 1 1, Bag-of-words,,, Bag-of-words, Bag-of-phrases, Bag-of-words DOI,, Bag-of-words, Bag-of-phrases, SIFT 10.3724/SP.J.1004.2012.00046
38 1 Vol. 38, No. 1 2012 1 ACTA AUTOMATICA SINICA January, 2012 Bag-of-phrases 1, 2 1 1 1, Bag-of-words,,, Bag-of-words, Bag-of-phrases, Bag-of-words DOI,, Bag-of-words, Bag-of-phrases, SIFT 10.3724/SP.J.1004.2012.00046
Introduction to Convolutional Neural Networks 2018 / 02 / 23
 Introduction to Convolutional Neural Networks 2018 / 02 / 23 Buzzword: CNN Convolutional neural networks (CNN, ConvNet) is a class of deep, feed-forward (not recurrent) artificial neural networks that
Introduction to Convolutional Neural Networks 2018 / 02 / 23 Buzzword: CNN Convolutional neural networks (CNN, ConvNet) is a class of deep, feed-forward (not recurrent) artificial neural networks that
FORCE AND MOTION SEPUP UNIT OVERVIEW
 FORCE AND MOTION SEPUP UNIT OVERVIEW Listed below is a summary of the activities in this unit. Note that the total teaching time is listed as 26-32 periods of approximately 50 minutes (approximately 5-6
FORCE AND MOTION SEPUP UNIT OVERVIEW Listed below is a summary of the activities in this unit. Note that the total teaching time is listed as 26-32 periods of approximately 50 minutes (approximately 5-6
Stereoscopic Programmable Automotive Headlights for Improved Safety Road
 Stereoscopic Programmable Automotive Headlights for Improved Safety Road Project ID: 30 Srinivasa Narasimhan (PI), Associate Professor Robotics Institute, Carnegie Mellon University https://orcid.org/0000-0003-0389-1921
Stereoscopic Programmable Automotive Headlights for Improved Safety Road Project ID: 30 Srinivasa Narasimhan (PI), Associate Professor Robotics Institute, Carnegie Mellon University https://orcid.org/0000-0003-0389-1921
CS 343: Artificial Intelligence
 CS 343: Artificial Intelligence Hidden Markov Models Prof. Scott Niekum The University of Texas at Austin [These slides based on those of Dan Klein and Pieter Abbeel for CS188 Intro to AI at UC Berkeley.
CS 343: Artificial Intelligence Hidden Markov Models Prof. Scott Niekum The University of Texas at Austin [These slides based on those of Dan Klein and Pieter Abbeel for CS188 Intro to AI at UC Berkeley.
Multilayer Neural Networks. (sometimes called Multilayer Perceptrons or MLPs)
") Multilayer Neural Networks (sometimes called Multilayer Perceptrons or MLPs) Linear separability Hyperplane In 2D: w x + w 2 x 2 + w 0 = 0 Feature x 2 = w w 2 x w 0 w 2 Feature 2 A perceptron can separate
Multilayer Neural Networks (sometimes called Multilayer Perceptrons or MLPs) Linear separability Hyperplane In 2D: w x + w 2 x 2 + w 0 = 0 Feature x 2 = w w 2 x w 0 w 2 Feature 2 A perceptron can separate
Human Activity Recognition and Estimation of Calorie Expenditure - A Data Analytic Approach
 Human Activity Recognition and Estimation of Calorie Expenditure - A Data Analytic Approach Mushtaque Ahamed A Dr. Snehanshu Saha PESIT-Bangalore South Campus December 4, 2015 Mushtaque Ahamed A Dr. Snehanshu
Human Activity Recognition and Estimation of Calorie Expenditure - A Data Analytic Approach Mushtaque Ahamed A Dr. Snehanshu Saha PESIT-Bangalore South Campus December 4, 2015 Mushtaque Ahamed A Dr. Snehanshu
SCENE UNDERSTANDING: Toward a Safer Navigation. Damien VIVET ISAE-SUPAERO DEOS Toulouse France
 SCENE UNDERSTANDING: Toward a Safer Navigation Damien VIVET ISAE-SUPAERO DEOS Toulouse France A three years old children is an expert of image analysis, content description and event recognition. Our society
SCENE UNDERSTANDING: Toward a Safer Navigation Damien VIVET ISAE-SUPAERO DEOS Toulouse France A three years old children is an expert of image analysis, content description and event recognition. Our society
Chart types and when to use them
 APPENDIX A Chart types and when to use them Pie chart Figure illustration of pie chart 2.3 % 4.5 % Browser Usage for April 2012 18.3 % 38.3 % Internet Explorer Firefox Chrome Safari Opera 35.8 % Pie chart
APPENDIX A Chart types and when to use them Pie chart Figure illustration of pie chart 2.3 % 4.5 % Browser Usage for April 2012 18.3 % 38.3 % Internet Explorer Firefox Chrome Safari Opera 35.8 % Pie chart
A NOVEL METHOD TO EVALUATE THE SAFETY OF HIGHLY AUTOMATED VEHICLES. Joshua L. Every Transportation Research Center Inc. United States of America
 A NOVEL METHOD TO EVALUATE THE SAFETY OF HIGHLY AUTOMATED VEHICLES Joshua L. Every Transportation Research Center Inc. United States of America Frank Barickman John Martin National Highway Traffic Safety
A NOVEL METHOD TO EVALUATE THE SAFETY OF HIGHLY AUTOMATED VEHICLES Joshua L. Every Transportation Research Center Inc. United States of America Frank Barickman John Martin National Highway Traffic Safety
A Contrario Detection of False Matches in Iris Recognition
 A Contrario Detection of False Matches in Iris Recognition Marcelo Mottalli, Mariano Tepper, and Marta Mejail Departamento de Computación, Universidad de Buenos Aires, Argentina Abstract. The pattern of
A Contrario Detection of False Matches in Iris Recognition Marcelo Mottalli, Mariano Tepper, and Marta Mejail Departamento de Computación, Universidad de Buenos Aires, Argentina Abstract. The pattern of
Multilayer Neural Networks. (sometimes called Multilayer Perceptrons or MLPs)
") Multilayer Neural Networks (sometimes called Multilayer Perceptrons or MLPs) Linear separability Hyperplane In 2D: w 1 x 1 + w 2 x 2 + w 0 = 0 Feature 1 x 2 = w 1 w 2 x 1 w 0 w 2 Feature 2 A perceptron
Multilayer Neural Networks (sometimes called Multilayer Perceptrons or MLPs) Linear separability Hyperplane In 2D: w 1 x 1 + w 2 x 2 + w 0 = 0 Feature 1 x 2 = w 1 w 2 x 1 w 0 w 2 Feature 2 A perceptron
AN APPLICATION OF SMEED AND ANDREASSEN ACCIDENT MODELS FOR THE CITY OF ANKARA BY DIFFERENTIAL EVALUATION ALGORITHM
 AN APPLICATION OF SMEED AND ANDREASSEN ACCIDENT MODELS FOR THE CITY OF ANKARA BY DIFFERENTIAL EVALUATION ALGORITHM 1 ERSIN KORKMAZ, 2 ALI PAYIDAR AKGUNGOR 1,2 Kırıkkale Universitesi, Muhendislik Fakultesi,
AN APPLICATION OF SMEED AND ANDREASSEN ACCIDENT MODELS FOR THE CITY OF ANKARA BY DIFFERENTIAL EVALUATION ALGORITHM 1 ERSIN KORKMAZ, 2 ALI PAYIDAR AKGUNGOR 1,2 Kırıkkale Universitesi, Muhendislik Fakultesi,
Robust License Plate Detection Using Covariance Descriptor in a Neural Network Framework
 MITSUBISHI ELECTRIC RESEARCH LABORATORIES http://www.merl.com Robust License Plate Detection Using Covariance Descriptor in a Neural Network Framework Fatih Porikli, Tekin Kocak TR2006-100 January 2007
MITSUBISHI ELECTRIC RESEARCH LABORATORIES http://www.merl.com Robust License Plate Detection Using Covariance Descriptor in a Neural Network Framework Fatih Porikli, Tekin Kocak TR2006-100 January 2007
Lane Marker Parameters for Vehicle s Steering Signal Prediction
 Lane Marker Parameters for Vehicle s Steering Signal Prediction ANDRIEJUS DEMČENKO, MINIJA TAMOŠIŪNAITĖ, AUŠRA VIDUGIRIENĖ, LEONAS JAKEVIČIUS 3 Department of Applied Informatics, Department of System Analysis
Lane Marker Parameters for Vehicle s Steering Signal Prediction ANDRIEJUS DEMČENKO, MINIJA TAMOŠIŪNAITĖ, AUŠRA VIDUGIRIENĖ, LEONAS JAKEVIČIUS 3 Department of Applied Informatics, Department of System Analysis
A CUSUM approach for online change-point detection on curve sequences
 ESANN 22 proceedings, European Symposium on Artificial Neural Networks, Computational Intelligence and Machine Learning. Bruges Belgium, 25-27 April 22, i6doc.com publ., ISBN 978-2-8749-49-. Available
ESANN 22 proceedings, European Symposium on Artificial Neural Networks, Computational Intelligence and Machine Learning. Bruges Belgium, 25-27 April 22, i6doc.com publ., ISBN 978-2-8749-49-. Available
Estimating Traffic Accidents in Turkey Using Differential Evolution Algorithm
 SSP - JOURNAL OF CIVIL ENGINEERING Vol. 12, Issue 1, 2017 DOI: 10.1515/sspjce-2017-0008 Estimating Traffic Accidents in Turkey Using Differential Evolution Algorithm Ali Payıdar Akgüngör, Ersin Korkmaz
SSP - JOURNAL OF CIVIL ENGINEERING Vol. 12, Issue 1, 2017 DOI: 10.1515/sspjce-2017-0008 Estimating Traffic Accidents in Turkey Using Differential Evolution Algorithm Ali Payıdar Akgüngör, Ersin Korkmaz
Autonomous Navigation for Flying Robots
 Computer Vision Group Prof. Daniel Cremers Autonomous Navigation for Flying Robots Lecture 6.2: Kalman Filter Jürgen Sturm Technische Universität München Motivation Bayes filter is a useful tool for state
Computer Vision Group Prof. Daniel Cremers Autonomous Navigation for Flying Robots Lecture 6.2: Kalman Filter Jürgen Sturm Technische Universität München Motivation Bayes filter is a useful tool for state
Constrained Optimization and Support Vector Machines
 Constrained Optimization and Support Vector Machines Man-Wai MAK Dept. of Electronic and Information Engineering, The Hong Kong Polytechnic University enmwmak@polyu.edu.hk http://www.eie.polyu.edu.hk/
Constrained Optimization and Support Vector Machines Man-Wai MAK Dept. of Electronic and Information Engineering, The Hong Kong Polytechnic University enmwmak@polyu.edu.hk http://www.eie.polyu.edu.hk/
Partially Observable Markov Decision Processes (POMDPs)
") Partially Observable Markov Decision Processes (POMDPs) Sachin Patil Guest Lecture: CS287 Advanced Robotics Slides adapted from Pieter Abbeel, Alex Lee Outline Introduction to POMDPs Locally Optimal Solutions
Partially Observable Markov Decision Processes (POMDPs) Sachin Patil Guest Lecture: CS287 Advanced Robotics Slides adapted from Pieter Abbeel, Alex Lee Outline Introduction to POMDPs Locally Optimal Solutions
arxiv: v1 [cs.ro] 14 Apr 2017
![arxiv: v1 [cs.ro] 14 Apr 2017](/thumbs/86/94270083.jpg "arxiv: v1 [cs.ro] 14 Apr 2017") Belief State Planning for Autonomously Navigating Urban Intersections Maxime Bouton, Akansel Cosgun, and Mykel J. Kochenderfer arxiv:74.43v [cs.ro] 4 Apr 7 Abstract Urban intersections represent a complex
Belief State Planning for Autonomously Navigating Urban Intersections Maxime Bouton, Akansel Cosgun, and Mykel J. Kochenderfer arxiv:74.43v [cs.ro] 4 Apr 7 Abstract Urban intersections represent a complex