suppressing traffic flow instabilities
|
|
|
- Britton Scott
- 5 years ago
- Views:
Transcription
1 suppressing traffic flow instabilities S S VF VC VL D D Berthold K.P. Horn
2
3
4 Traffic flow instabilities waste energy: At high densities traffic flow becomes unstable Traffic acts as if it was a dilatant (shear thickening) fluid
5 Traffic flow instabilities waste energy: At high densities traffic flow becomes unstable Traffic acts as if it was a dilatant (shear thickening) fluid Stop-and-go instabilities reduce average speed Total time for a trip is increased by unsteady flow Kinetic energy wasted every time brakes are used
6 Traffic flow instabilities waste energy: At high densities traffic flow becomes unstable Traffic acts as if it was a dilatant (shear thickening) fluid Stop-and-go instabilities reduce average speed Total time for a trip is increased by unsteady flow Kinetic energy wasted every time brakes are used Building more roads has high energy cost as well Metering reduces potential throughput
7 Source of Instabilities At high flow densities, traffic flow becomes unstable Travelling waves of velocity and density fluctuations Perturbations are amplified Effects propagate upstream
8 Source of Instabilities At high flow densities, traffic flow becomes unstable Travelling waves of velocity and density fluctuations Perturbations are amplified Effects propagate upstream Instabilities reduce average speed and throughput Instabilities limit the carrying capacity of a roadway Increase wear and tear on vehicles and on nerves Stop-and-go traffic greatly reduces fuel efficiency
9 Alternative Schemes Building more roads reduces density for a while; Metering reduces instabilities by limiting density; Reduction in reaction time allows higher density; Platooning allows small inter-vehicle distances;... not
10 Car-Following Model v c v l C L d l Control of car C depends on d l and v l v c
11 Car-Following Feedback Control d l v l -v c a v des v c v max Acceleration depends on d l and v l v c (and possibly v des, v c, and v max )
12 Car-Following Model v f v c v l F C L d f d l Control of car C depends on d l and v l v c Control of car F depends on d f and v c v f
13 Car-Following System Model... H(s) H(s) H(s)... Overall transfer function ( H(s) ) n
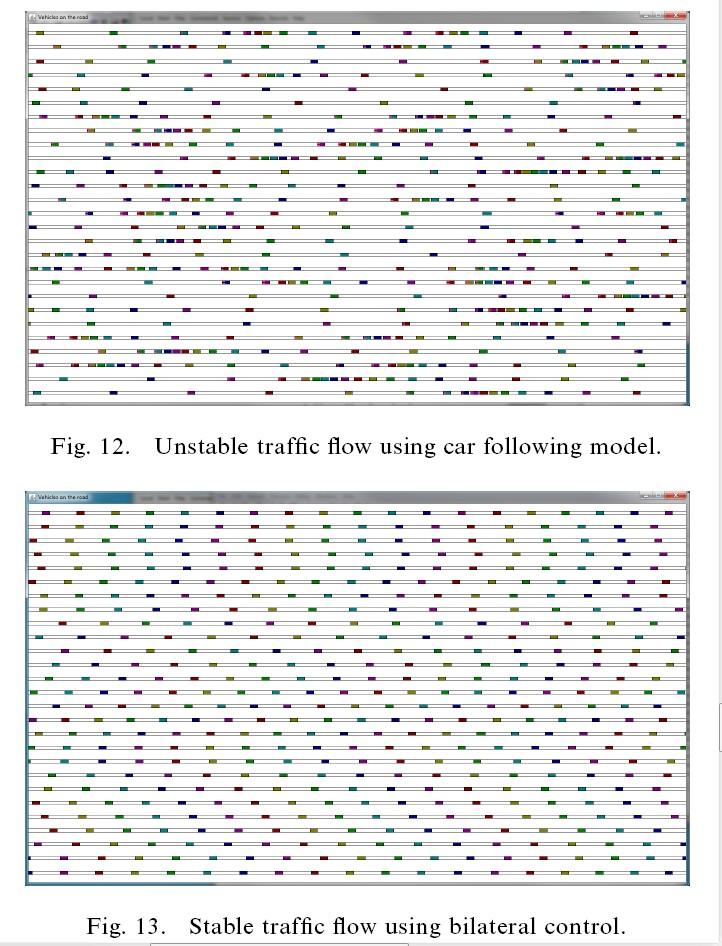
14
15
16
17 Need more than adaptive cruise control Many explanations for how flow instabilities arise For example: Simple car-following model
18 Need more than adaptive cruise control Many explanations for how flow instabilities arise For example: Simple car-following model But, few ideas on what to do about it Adaptive cruise control does not solve the problem
19 Need more than adaptive cruise control Many explanations for how flow instabilities arise For example: Simple car-following model But, few ideas on what to do about it Adaptive cruise control does not solve the problem Solution is to use bilateral information flow Cheap machine vision systems support bilateral control
20 Bilateral Control v f v c v l F C L d f d l Control of car C depends on d l and v l v c and on d f and v c v f
21 Feedback Control Comparison d l v l -v c d l v l -v c a d f v c -v f a v des v c v max v des v c v max (a) acceleration depends on d l, v l v c, (b) acceleration depends on d l, v l v c, as well as d f and v c v f
22 System Model Comparison... H(s) H(s) H(s)... H 1 (s) H 1 (s) H 1 (s) H 2 (s) H 2 (s) H 2 (s)
23 Model of Bilateral Control S S VF VC VL D D Force in springs proportional to difference from rest length Force in damper proportional to difference in velocities
24
25
26
27
28
29 Sensors Need sensors for distance and (relative) velocity Alternatives: radar, lidar, sonar, and machine vision Imaging chips are low cost as is on-board processing
30 Sensors Need sensors for distance and (relative) velocity Alternatives: radar, lidar, sonar, and machine vision Imaging chips are low cost as is on-board processing Distance: binocular stereo, trinocular stereo,... Velocity: motion vision methods... Distance/Velocity: time to contact (TTC)






31 Time To Contact
32 suppressing traffic flow instabilities S S VF VC VL D D Berthold K.P. Horn
33
34
35 Competing Explanations Many different models predict traffic flow instabilities: Cellular automata; Differential equations; Feedback control models; Fluid flow models; Particle tracking models; Car-following simulation models;... What is needed is a method for suppressing instabilities
36 In the absence of instabilities: Smooth Flow Analysis Safe separation speed reaction time: d = vt Density inverse of length plus separation: ρ = 1/(l + d) Throughput speed density: c = vρ = v/(l + vt ) Approaches inverse of reaction time: c 1/T E.g. T = 1 sec c approaches 3600 vehicles per hour In practice, throughput is considerably lower because flow is not smooth
37 Illustrative Bilateral Control System d l k d v l -v c d f k v + + x a v c -v f k c v des v c v max
38 Block Diagram of Bilateral Control System 5 current speed sensor and driver input 2 following distance and speed sensors 3 vehicle controller system 1 leading distance and speed sensors 4 forward motion control of vehicle




39 Time To Contact (time lapse sequence)

40 Time To Contact (real world sequence)
41 What is the business model? Problems to solve What sensors and algorithms? TTC + trinocular stereo? Full automation, modulation or merely advisory? Extend to mix of automated and legacy vehicles Extend to multiple lanes, exits and entrances etc.
42 What is the business model? Problems to solve What sensors and algorithms? TTC + trinocular stereo? Full automation, modulation or merely advisory? Extend to mix of automated and legacy vehicles Extend to multiple lanes, exits and entrances etc. Explore use of inter-vehicle communication for sensing Optimize the control scheme
Wave Equation of Suppressed Traffic Flow Instabilities
 Wave Equation of Suppressed Traffic Flow Instabilities Berthold K.P. Horn and Liang Wang Abstract Traffic congestion wastes fuel and commuter s time and adds to CO 2 emissions. Stop-and-go traffic instabilities
Wave Equation of Suppressed Traffic Flow Instabilities Berthold K.P. Horn and Liang Wang Abstract Traffic congestion wastes fuel and commuter s time and adds to CO 2 emissions. Stop-and-go traffic instabilities
WITH the rapid development of sensors and wireless
 This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI 1.119/TAC.19.89149,
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI 1.119/TAC.19.89149,
Position, Speed and Velocity Position is a variable that gives your location relative to an origin. The origin is the place where position equals 0.
 Position, Speed and Velocity Position is a variable that gives your location relative to an origin. The origin is the place where position equals 0. The position of this car at 50 cm describes where the
Position, Speed and Velocity Position is a variable that gives your location relative to an origin. The origin is the place where position equals 0. The position of this car at 50 cm describes where the
c) What are cumulative curves, and how are they constructed? (1 pt) A count of the number of vehicles over time at one location (1).
 What are cumulative curves, and how are they constructed? (1 pt) A count of the number of vehicles over time at one location (1).") Exam 4821 Duration 3 hours. Points are indicated for each question. The exam has 5 questions 54 can be obtained. Note that half of the points is not always suffcient for a 6. Use your time wisely! Remarks:
Exam 4821 Duration 3 hours. Points are indicated for each question. The exam has 5 questions 54 can be obtained. Note that half of the points is not always suffcient for a 6. Use your time wisely! Remarks:
A Continuous Model for Two-Lane Traffic Flow
 A Continuous Model for Two-Lane Traffic Flow Richard Yi, Harker School Prof. Gabriele La Nave, University of Illinois, Urbana-Champaign PRIMES Conference May 16, 2015 Two Ways of Approaching Traffic Flow
A Continuous Model for Two-Lane Traffic Flow Richard Yi, Harker School Prof. Gabriele La Nave, University of Illinois, Urbana-Champaign PRIMES Conference May 16, 2015 Two Ways of Approaching Traffic Flow
The driver then accelerates the car to 23 m/s in 4 seconds. Use the equation in the box to calculate the acceleration of the car.
 Q1.The diagram shows the forces acting on a car. The car is being driven along a straight, level road at a constant speed of 12 m/s. (a) The driver then accelerates the car to 23 m/s in 4 seconds. Use
Q1.The diagram shows the forces acting on a car. The car is being driven along a straight, level road at a constant speed of 12 m/s. (a) The driver then accelerates the car to 23 m/s in 4 seconds. Use
We provide two sections from the book (in preparation) Intelligent and Autonomous Road Vehicles, by Ozguner, Acarman and Redmill.
 Intelligent and Autonomous Road Vehicles, by Ozguner, Acarman and Redmill.") We provide two sections from the book (in preparation) Intelligent and Autonomous Road Vehicles, by Ozguner, Acarman and Redmill. 2.3.2. Steering control using point mass model: Open loop commands We consider
We provide two sections from the book (in preparation) Intelligent and Autonomous Road Vehicles, by Ozguner, Acarman and Redmill. 2.3.2. Steering control using point mass model: Open loop commands We consider
RECAP!! Paul is a safe driver who always drives the speed limit. Here is a record of his driving on a straight road. Time (s)
") RECAP!! What is uniform motion? > Motion in a straight line > Moving at a constant speed Yes or No? Yes or No? Paul is a safe driver who always drives the speed limit. Here is a record of his driving on
RECAP!! What is uniform motion? > Motion in a straight line > Moving at a constant speed Yes or No? Yes or No? Paul is a safe driver who always drives the speed limit. Here is a record of his driving on
Day 5 Notes: The Fundamental Theorem of Calculus, Particle Motion, and Average Value
 AP Calculus Unit 6 Basic Integration & Applications Day 5 Notes: The Fundamental Theorem of Calculus, Particle Motion, and Average Value b (1) v( t) dt p( b) p( a), where v(t) represents the velocity and
AP Calculus Unit 6 Basic Integration & Applications Day 5 Notes: The Fundamental Theorem of Calculus, Particle Motion, and Average Value b (1) v( t) dt p( b) p( a), where v(t) represents the velocity and
A Hierarchical Model-based Optimization Control Method for Merging of Connected Automated Vehicles. Na Chen, Meng Wang, Tom Alkim, Bart van Arem
 A Hierarchical Model-based Optimization Control Method for Merging of Connected Automated Vehicles Na Chen, Meng Wang, Tom Alkim, Bart van Arem 1 Background Vehicle-to-Vehicle communication Vehicle-to-Infrastructure
A Hierarchical Model-based Optimization Control Method for Merging of Connected Automated Vehicles Na Chen, Meng Wang, Tom Alkim, Bart van Arem 1 Background Vehicle-to-Vehicle communication Vehicle-to-Infrastructure
Chapter 5 Traffic Flow Characteristics
 Chapter 5 Traffic Flow Characteristics 1 Contents 2 Introduction The Nature of Traffic Flow Approaches to Understanding Traffic Flow Parameters Connected with Traffic Flow Categories of Traffic Flow The
Chapter 5 Traffic Flow Characteristics 1 Contents 2 Introduction The Nature of Traffic Flow Approaches to Understanding Traffic Flow Parameters Connected with Traffic Flow Categories of Traffic Flow The
To convert a speed to a velocity. V = Velocity in feet per seconds (ft/sec) S = Speed in miles per hour (mph) = Mathematical Constant
 S = Speed in miles per hour (mph) = Mathematical Constant") To convert a speed to a velocity V S ( 1.466) V Velocity in feet per seconds (ft/sec) S Speed in miles per hour (mph) 1.466 Mathematical Constant Example Your driver just had a rear-end accident and says
To convert a speed to a velocity V S ( 1.466) V Velocity in feet per seconds (ft/sec) S Speed in miles per hour (mph) 1.466 Mathematical Constant Example Your driver just had a rear-end accident and says
Spontaneous Jam Formation
 Highway Traffic Introduction Traffic = macroscopic system of interacting particles (driven or self-driven) Nonequilibrium physics: Driven systems far from equilibrium Collective phenomena physics! Empirical
Highway Traffic Introduction Traffic = macroscopic system of interacting particles (driven or self-driven) Nonequilibrium physics: Driven systems far from equilibrium Collective phenomena physics! Empirical
Traffic Flow Simulation using Cellular automata under Non-equilibrium Environment
 Traffic Flow Simulation using Cellular automata under Non-equilibrium Environment Hideki Kozuka, Yohsuke Matsui, Hitoshi Kanoh Institute of Information Sciences and Electronics, University of Tsukuba,
Traffic Flow Simulation using Cellular automata under Non-equilibrium Environment Hideki Kozuka, Yohsuke Matsui, Hitoshi Kanoh Institute of Information Sciences and Electronics, University of Tsukuba,
2.1 Traffic Stream Characteristics. Time Space Diagram and Measurement Procedures Variables of Interest
 2.1 Traffic Stream Characteristics Time Space Diagram and Measurement Procedures Variables of Interest Traffic Stream Models 2.1 Traffic Stream Characteristics Time Space Diagram Speed =100km/h = 27.78
2.1 Traffic Stream Characteristics Time Space Diagram and Measurement Procedures Variables of Interest Traffic Stream Models 2.1 Traffic Stream Characteristics Time Space Diagram Speed =100km/h = 27.78
Signalized Intersection Delay Models
 Chapter 35 Signalized Intersection Delay Models 35.1 Introduction Signalized intersections are the important points or nodes within a system of highways and streets. To describe some measure of effectiveness
Chapter 35 Signalized Intersection Delay Models 35.1 Introduction Signalized intersections are the important points or nodes within a system of highways and streets. To describe some measure of effectiveness
There are two main types of friction:
 Section 4.15: Friction Friction is needed to move. Without friction, a car would sit in one spot spinning its tires, and a person would not be able to step forward. However, the motion of an object along
Section 4.15: Friction Friction is needed to move. Without friction, a car would sit in one spot spinning its tires, and a person would not be able to step forward. However, the motion of an object along
Displacement, Velocity & Acceleration
 Displacement, Velocity & Acceleration Honors/AP Physics Mr. Velazquez Rm. 254 1 Velocity vs. Speed Speed and velocity can both be defined as a change in position or displacement over time. However, speed
Displacement, Velocity & Acceleration Honors/AP Physics Mr. Velazquez Rm. 254 1 Velocity vs. Speed Speed and velocity can both be defined as a change in position or displacement over time. However, speed
Formative Assessment: Uniform Acceleration
 Formative Assessment: Uniform Acceleration Name 1) A truck on a straight road starts from rest and accelerates at 3.0 m/s 2 until it reaches a speed of 24 m/s. Then the truck travels for 20 s at constant
Formative Assessment: Uniform Acceleration Name 1) A truck on a straight road starts from rest and accelerates at 3.0 m/s 2 until it reaches a speed of 24 m/s. Then the truck travels for 20 s at constant
arxiv:cond-mat/ v3 [cond-mat.stat-mech] 18 Aug 2003
![arxiv:cond-mat/ v3 [cond-mat.stat-mech] 18 Aug 2003](/thumbs/80/81188192.jpg "arxiv:cond-mat/ v3 [cond-mat.stat-mech] 18 Aug 2003") arxiv:cond-mat/0211684v3 [cond-mat.stat-mech] 18 Aug 2003 Three-Phase Traffic Theory and Highway Capacity Abstract Boris S. Kerner Daimler Chrysler AG, RIC/TS, T729, 70546 Stuttgart, Germany Hypotheses
arxiv:cond-mat/0211684v3 [cond-mat.stat-mech] 18 Aug 2003 Three-Phase Traffic Theory and Highway Capacity Abstract Boris S. Kerner Daimler Chrysler AG, RIC/TS, T729, 70546 Stuttgart, Germany Hypotheses
A Probability-Based Model of Traffic Flow
 A Probability-Based Model of Traffic Flow Richard Yi, Harker School Mentored by Gabriele La Nave, University of Illinois, Urbana-Champaign January 23, 2016 Abstract Describing the behavior of traffic via
A Probability-Based Model of Traffic Flow Richard Yi, Harker School Mentored by Gabriele La Nave, University of Illinois, Urbana-Champaign January 23, 2016 Abstract Describing the behavior of traffic via
STANDING WAVES AND THE INFLUENCE OF SPEED LIMITS
 STANDING WAVES AND THE INFLUENCE OF SPEED LIMITS H. Lenz, R. Sollacher *, M. Lang + Siemens AG, Corporate Technology, Information and Communications, Otto-Hahn-Ring 6, 8173 Munich, Germany fax: ++49/89/636-49767
STANDING WAVES AND THE INFLUENCE OF SPEED LIMITS H. Lenz, R. Sollacher *, M. Lang + Siemens AG, Corporate Technology, Information and Communications, Otto-Hahn-Ring 6, 8173 Munich, Germany fax: ++49/89/636-49767
Analysis of Phase Transition in Traffic Flow based on a New Model of Driving Decision
 Commun. Theor. Phys. 56 (2011) 177 183 Vol. 56, No. 1, July 15, 2011 Analysis of Phase Transition in Traffic Flow based on a New Model of Driving Decision PENG Yu ( Ý), 1 SHANG Hua-Yan (Ù), 2, and LU Hua-Pu
Commun. Theor. Phys. 56 (2011) 177 183 Vol. 56, No. 1, July 15, 2011 Analysis of Phase Transition in Traffic Flow based on a New Model of Driving Decision PENG Yu ( Ý), 1 SHANG Hua-Yan (Ù), 2, and LU Hua-Pu
Friction Can Be Rough
 8.1 Observe and Find a Pattern Friction Can Be Rough Perform the following experiment: Rest a brick on a rough surface. Tie a string around the brick and attach a large spring scale to it. Pull the scale
8.1 Observe and Find a Pattern Friction Can Be Rough Perform the following experiment: Rest a brick on a rough surface. Tie a string around the brick and attach a large spring scale to it. Pull the scale
CHAPTER 2UNIFORMLY ACCELERATED MOTION
 CHAPTER 2UNIFORMLY ACCELERATED MOTION 1 Graph of uniformly accelerated motion [Concept] An object has initial velocity u, accelerates uniformly on a linear track with acceleration a for a period of time
CHAPTER 2UNIFORMLY ACCELERATED MOTION 1 Graph of uniformly accelerated motion [Concept] An object has initial velocity u, accelerates uniformly on a linear track with acceleration a for a period of time
Modeling Traffic Flow on Multi-Lane Road: Effects of Lane-Change Manoeuvres Due to an On-ramp
 Global Journal of Pure and Applied Mathematics. ISSN 973-768 Volume 4, Number 28, pp. 389 46 Research India Publications http://www.ripublication.com/gjpam.htm Modeling Traffic Flow on Multi-Lane Road:
Global Journal of Pure and Applied Mathematics. ISSN 973-768 Volume 4, Number 28, pp. 389 46 Research India Publications http://www.ripublication.com/gjpam.htm Modeling Traffic Flow on Multi-Lane Road:
Recent Researches in Engineering and Automatic Control
 Traffic Flow Problem Simulation in Jordan Abdul Hai Alami Mechanical Engineering Higher Colleges of Technology 17155 Al Ain United Arab Emirates abdul.alami@hct.ac.ae http://sites.google.com/site/alamihu
Traffic Flow Problem Simulation in Jordan Abdul Hai Alami Mechanical Engineering Higher Colleges of Technology 17155 Al Ain United Arab Emirates abdul.alami@hct.ac.ae http://sites.google.com/site/alamihu
THE POTENTIAL OF APPLYING MACHINE LEARNING FOR PREDICTING CUT-IN BEHAVIOUR OF SURROUNDING TRAFFIC FOR TRUCK-PLATOONING SAFETY
 THE POTENTIAL OF APPLYING MACHINE LEARNING FOR PREDICTING CUT-IN BEHAVIOUR OF SURROUNDING TRAFFIC FOR TRUCK-PLATOONING SAFETY Irene Cara Jan-Pieter Paardekooper TNO Helmond The Netherlands Paper Number
THE POTENTIAL OF APPLYING MACHINE LEARNING FOR PREDICTING CUT-IN BEHAVIOUR OF SURROUNDING TRAFFIC FOR TRUCK-PLATOONING SAFETY Irene Cara Jan-Pieter Paardekooper TNO Helmond The Netherlands Paper Number
A ROBUST SIGNAL-FLOW ARCHITECTURE FOR COOPERATIVE VEHICLE DENSITY CONTROL
 A ROBUST SIGNAL-FLOW ARCHITECTURE FOR COOPERATIVE VEHICLE DENSITY CONTROL Thomas A. Baran Berthold K. P. Horn Massachusetts Institute of Technology Digital Signal Processing Group, Research Laboratory
A ROBUST SIGNAL-FLOW ARCHITECTURE FOR COOPERATIVE VEHICLE DENSITY CONTROL Thomas A. Baran Berthold K. P. Horn Massachusetts Institute of Technology Digital Signal Processing Group, Research Laboratory
Signalized Intersection Delay Models
 Signalized Intersection Delay Models Lecture Notes in Transportation Systems Engineering Prof. Tom V. Mathew Contents 1 Introduction 1 2 Types of delay 2 2.1 Stopped Time Delay................................
Signalized Intersection Delay Models Lecture Notes in Transportation Systems Engineering Prof. Tom V. Mathew Contents 1 Introduction 1 2 Types of delay 2 2.1 Stopped Time Delay................................
A MODIFIED CELLULAR AUTOMATON MODEL FOR RING ROAD TRAFFIC WITH VELOCITY GUIDANCE
 International Journal of Modern Physics C Vol. 20, No. 5 (2009) 711 719 c World Scientific Publishing Company A MODIFIED CELLULAR AUTOMATON MODEL FOR RING ROAD TRAFFIC WITH VELOCITY GUIDANCE C. Q. MEI,,
International Journal of Modern Physics C Vol. 20, No. 5 (2009) 711 719 c World Scientific Publishing Company A MODIFIED CELLULAR AUTOMATON MODEL FOR RING ROAD TRAFFIC WITH VELOCITY GUIDANCE C. Q. MEI,,
Traffic Flow Theory & Simulation
 Traffic Flow Theory & Simulation S.P. Hoogendoorn Lecture 4 Shockwave theory Shockwave theory I: Introduction Applications of the Fundamental Diagram February 14, 2010 1 Vermelding onderdeel organisatie
Traffic Flow Theory & Simulation S.P. Hoogendoorn Lecture 4 Shockwave theory Shockwave theory I: Introduction Applications of the Fundamental Diagram February 14, 2010 1 Vermelding onderdeel organisatie
Emergence of traffic jams in high-density environments
 Emergence of traffic jams in high-density environments Bill Rose 12/19/2012 Physics 569: Emergent States of Matter Phantom traffic jams, those that have no apparent cause, can arise as an emergent phenomenon
Emergence of traffic jams in high-density environments Bill Rose 12/19/2012 Physics 569: Emergent States of Matter Phantom traffic jams, those that have no apparent cause, can arise as an emergent phenomenon
Driving in Rural Areas. 82 percent of a miles of roadways are rural roads.
 Driving in Rural Areas 82 percent of a miles of roadways are rural roads. Different types of Roadways Rural roads are constructed of many different types of materials. Some are paved Others are not. Different
Driving in Rural Areas 82 percent of a miles of roadways are rural roads. Different types of Roadways Rural roads are constructed of many different types of materials. Some are paved Others are not. Different
Towards Fully-automated Driving
 Towards Fully-automated Driving Challenges and Potential Solutions Dr. Gijs Dubbelman Mobile Perception Systems EE-SPS/VCA Mobile Perception Systems 6 PhDs, postdoc, project manager, software engineer,
Towards Fully-automated Driving Challenges and Potential Solutions Dr. Gijs Dubbelman Mobile Perception Systems EE-SPS/VCA Mobile Perception Systems 6 PhDs, postdoc, project manager, software engineer,
Part D: Kinematic Graphing - ANSWERS
 Part D: Kinematic Graphing - ANSWERS 31. On the position-time graph below, sketch a plot representing the motion of an object which is.... Label each line with the corresponding letter (e.g., "a", "b",
Part D: Kinematic Graphing - ANSWERS 31. On the position-time graph below, sketch a plot representing the motion of an object which is.... Label each line with the corresponding letter (e.g., "a", "b",
2. Kinetic friction - The force that acts against an object s motion. - Occurs once static friction has been overcome and object is moving
 Section 2.14: Friction Friction is needed to move. Without friction, a car would sit in one spot spinning its tires, and a person would not be able to step forward. However, the motion of an object along
Section 2.14: Friction Friction is needed to move. Without friction, a car would sit in one spot spinning its tires, and a person would not be able to step forward. However, the motion of an object along
Disturbance Propagation in Vehicle Strings
 Disturbance Propagation in Vehicle Strings Pete Seiler, Aniruddha Pant, and Karl Hedrick Pete Seiler is with the University of Illinois, Urbana-Champaign; email: pseiler@uiuc.edu Aniruddha Pant is with
Disturbance Propagation in Vehicle Strings Pete Seiler, Aniruddha Pant, and Karl Hedrick Pete Seiler is with the University of Illinois, Urbana-Champaign; email: pseiler@uiuc.edu Aniruddha Pant is with
Car-Following Models as Dynamical Systems and the Mechanisms for Macroscopic Pattern Formation
 Car-Following Models as Dynamical Systems and the Mechanisms for Macroscopic Pattern Formation R. Eddie Wilson, University of Bristol EPSRC Advanced Research Fellowship EP/E055567/1 http://www.enm.bris.ac.uk/staff/rew
Car-Following Models as Dynamical Systems and the Mechanisms for Macroscopic Pattern Formation R. Eddie Wilson, University of Bristol EPSRC Advanced Research Fellowship EP/E055567/1 http://www.enm.bris.ac.uk/staff/rew
FORCE AND MOTION SEPUP UNIT OVERVIEW
 FORCE AND MOTION SEPUP UNIT OVERVIEW Listed below is a summary of the activities in this unit. Note that the total teaching time is listed as 26-32 periods of approximately 50 minutes (approximately 5-6
FORCE AND MOTION SEPUP UNIT OVERVIEW Listed below is a summary of the activities in this unit. Note that the total teaching time is listed as 26-32 periods of approximately 50 minutes (approximately 5-6
CELLULAR AUTOMATA SIMULATION OF TRAFFIC LIGHT STRATEGIES IN OPTIMIZING THE TRAFFIC FLOW
 CELLULAR AUTOMATA SIMULATION OF TRAFFIC LIGHT STRATEGIES IN OPTIMIZING THE TRAFFIC FLOW ENDAR H. NUGRAHANI, RISWAN RAMDHANI Department of Mathematics, Faculty of Mathematics and Natural Sciences, Bogor
CELLULAR AUTOMATA SIMULATION OF TRAFFIC LIGHT STRATEGIES IN OPTIMIZING THE TRAFFIC FLOW ENDAR H. NUGRAHANI, RISWAN RAMDHANI Department of Mathematics, Faculty of Mathematics and Natural Sciences, Bogor
A Unifying Approach to the Dynamics of Production, Supply, and Traffic Networks. Dirk Helbing
 A Unifying Approach to the Dynamics of Production, Supply, and Traffic Networks Institute for Transport & Economics Faculty of Traffic Sciences Dresden University of Technology www.helbing.org 1 How Chip
A Unifying Approach to the Dynamics of Production, Supply, and Traffic Networks Institute for Transport & Economics Faculty of Traffic Sciences Dresden University of Technology www.helbing.org 1 How Chip
An Interruption in the Highway: New Approach to Modeling the Car-Traffic
 EJTP 7, No. 23 (21) 123 136 Electronic Journal of Theoretical Physics An Interruption in the Highway: New Approach to Modeling the Car-Traffic Amin Rezaeezadeh Electrical Engineering Department, Sharif
EJTP 7, No. 23 (21) 123 136 Electronic Journal of Theoretical Physics An Interruption in the Highway: New Approach to Modeling the Car-Traffic Amin Rezaeezadeh Electrical Engineering Department, Sharif
Communication-based Cooperative Driving of Road Vehicles by Motion Synchronization
 Communication-based Cooperative Driving of Road Vehicles by Motion Synchronization K. Konuk DC 2010.47 Master s Thesis Supervisor: Coach: Thesis committee: prof.dr. H. Nijmeijer ir. J. Ploeg (TNO) prof.dr.
Communication-based Cooperative Driving of Road Vehicles by Motion Synchronization K. Konuk DC 2010.47 Master s Thesis Supervisor: Coach: Thesis committee: prof.dr. H. Nijmeijer ir. J. Ploeg (TNO) prof.dr.
Modified flatbed tow truck model for stable and safe platooning in presences of lags, communication and sensing delays
 Modified flatbed tow truck model for stable and safe platooning in presences of lags, communication and sensing delays Alan ALI 1, Gaëtan GARCIA 2 and Philippe MARTINET 1 Abstract Many ideas have been
Modified flatbed tow truck model for stable and safe platooning in presences of lags, communication and sensing delays Alan ALI 1, Gaëtan GARCIA 2 and Philippe MARTINET 1 Abstract Many ideas have been
Coupled Map Traffic Flow Simulator Based on Optimal Velocity Functions
 Coupled Map Traffic Flow Simulator Based on Optimal Velocity Functions Shin-ichi Tadaki 1,, Macoto Kikuchi 2,, Yuki Sugiyama 3,, and Satoshi Yukawa 4, 1 Department of Information Science, Saga University,
Coupled Map Traffic Flow Simulator Based on Optimal Velocity Functions Shin-ichi Tadaki 1,, Macoto Kikuchi 2,, Yuki Sugiyama 3,, and Satoshi Yukawa 4, 1 Department of Information Science, Saga University,
Traffic Flow. June 30, David Bosworth
 Traffic Flow June 30, 2009 By David Bosworth Abstract: In the following, I will try to eplain the method of characteristics, which is involved in solving many aspects of traffic flow, but not for traffic
Traffic Flow June 30, 2009 By David Bosworth Abstract: In the following, I will try to eplain the method of characteristics, which is involved in solving many aspects of traffic flow, but not for traffic
Derivation of the Yellow Change Interval Formula
 Derivation of the Yellow Change Interval Formula Brian Ceccarelli, Joseph Shovlin The yellow change interval formula traffic engineers use to set yellow light durations originated from a paper written
Derivation of the Yellow Change Interval Formula Brian Ceccarelli, Joseph Shovlin The yellow change interval formula traffic engineers use to set yellow light durations originated from a paper written
Traffic flow theory involves the development of mathematical relationships among
 CHAPTER 6 Fundamental Principles of Traffic Flow Traffic flow theory involves the development of mathematical relationships among the primary elements of a traffic stream: flow, density, and speed. These
CHAPTER 6 Fundamental Principles of Traffic Flow Traffic flow theory involves the development of mathematical relationships among the primary elements of a traffic stream: flow, density, and speed. These
Acceleration review. Regular
 Acceleration review Regular Book pg 82 #91 A car is traveling 20m/s when the driver sees a child standing on the road. She takes 0.80s to react, then steps on the brakes and slows at 7.0m/s 2. How far
Acceleration review Regular Book pg 82 #91 A car is traveling 20m/s when the driver sees a child standing on the road. She takes 0.80s to react, then steps on the brakes and slows at 7.0m/s 2. How far
The stopping distance of a car is the sum of the thinking distance and the braking distance.
 The stopping distance of a car is the sum of the thinking distance and the braking distance. The table below shows how the thinking distance and braking distance vary with speed. Speed in m / s Thinking
The stopping distance of a car is the sum of the thinking distance and the braking distance. The table below shows how the thinking distance and braking distance vary with speed. Speed in m / s Thinking
KINEMATICS WHERE ARE YOU? HOW FAST? VELOCITY OR SPEED WHEN YOU MOVE. Typical Cartesian Coordinate System. usually only the X and Y axis.
 KINEMATICS File:The Horse in Motion.jpg - Wikimedia Foundation 1 WHERE ARE YOU? Typical Cartesian Coordinate System usually only the X and Y axis meters File:3D coordinate system.svg - Wikimedia Foundation
KINEMATICS File:The Horse in Motion.jpg - Wikimedia Foundation 1 WHERE ARE YOU? Typical Cartesian Coordinate System usually only the X and Y axis meters File:3D coordinate system.svg - Wikimedia Foundation
Motion Chapter 3, Section 1: Distance, Displacement, Speed, Velocity
 3 Motion Chapter 3, Section 1: Distance, Displacement, Speed, Velocity Distance An important part of describing the motion of an object is to describe how far it has moved, which is distance. The SI unit
3 Motion Chapter 3, Section 1: Distance, Displacement, Speed, Velocity Distance An important part of describing the motion of an object is to describe how far it has moved, which is distance. The SI unit
Traffic Progression Models
 Traffic Progression Models Lecture Notes in Transportation Systems Engineering Prof. Tom V. Mathew Contents 1 Introduction 1 2 Characterizing Platoon 2 2.1 Variables describing platoon............................
Traffic Progression Models Lecture Notes in Transportation Systems Engineering Prof. Tom V. Mathew Contents 1 Introduction 1 2 Characterizing Platoon 2 2.1 Variables describing platoon............................
Question Expected Answers Marks. energy, power and speed underlined. Scale diagram: correct triangle / parallelogram drawn on Fig. 1.
 1 (a)(i) (b) energy, power and speed underlined any error loses this mark vector has magnitude / size vector has a direction Scale diagram: correct triangle / parallelogram drawn on Fig. 1.1 scale stated
1 (a)(i) (b) energy, power and speed underlined any error loses this mark vector has magnitude / size vector has a direction Scale diagram: correct triangle / parallelogram drawn on Fig. 1.1 scale stated
Identify the letter of the choice that best completes the statement or answers the question.
 Chapter 12 - Practice Questions Multiple Choice Identify the letter of the choice that best completes the statement or answers the question. 1) Never remove a radiator cap on a hot engine because a. the
Chapter 12 - Practice Questions Multiple Choice Identify the letter of the choice that best completes the statement or answers the question. 1) Never remove a radiator cap on a hot engine because a. the
KINEMATICS. File:The Horse in Motion.jpg - Wikimedia Foundation. Monday, June 17, 13
 KINEMATICS File:The Horse in Motion.jpg - Wikimedia Foundation 1 WHERE ARE YOU? Typical Cartesian Coordinate System usually only the X and Y axis meters File:3D coordinate system.svg - Wikimedia Foundation
KINEMATICS File:The Horse in Motion.jpg - Wikimedia Foundation 1 WHERE ARE YOU? Typical Cartesian Coordinate System usually only the X and Y axis meters File:3D coordinate system.svg - Wikimedia Foundation
Traffic Flow Theory & Simulation
 Traffic Flow Theory & Simulation S.P. Hoogendoorn Lecture 7 Introduction to Phenomena Introduction to phenomena And some possible explanations... 2/5/2011, Prof. Dr. Serge Hoogendoorn, Delft University
Traffic Flow Theory & Simulation S.P. Hoogendoorn Lecture 7 Introduction to Phenomena Introduction to phenomena And some possible explanations... 2/5/2011, Prof. Dr. Serge Hoogendoorn, Delft University
Important: This test consists of 16 multiple choice problems, each worth 6.25 points.
 Physics 214 Exam 1 Spring 2005 Fill in on the OPSCAN sheet: 1) Name 2) Student identification number 3) Exam number as 01 4) Sign the OPSCAN sheet Important: This test consists of 16 multiple choice problems,
Physics 214 Exam 1 Spring 2005 Fill in on the OPSCAN sheet: 1) Name 2) Student identification number 3) Exam number as 01 4) Sign the OPSCAN sheet Important: This test consists of 16 multiple choice problems,
Coordinated Control of Unmanned Aerial Vehicles. Peter Joseph Seiler. B.S. (University of Illinois at Urbana-Champaign) 1996
 1996") Coordinated Control of Unmanned Aerial Vehicles by Peter Joseph Seiler B.S. (University of Illinois at Urbana-Champaign) 1996 B.S. (University of Illinois at Urbana-Champaign) 1996 A dissertation submitted
Coordinated Control of Unmanned Aerial Vehicles by Peter Joseph Seiler B.S. (University of Illinois at Urbana-Champaign) 1996 B.S. (University of Illinois at Urbana-Champaign) 1996 A dissertation submitted
666. Controllable vibro-protective system for the driver seat of a multi-axis vehicle
 666. Controllable vibro-protective system for the driver seat of a multi-axis vehicle A. Bubulis 1, G. Reizina, E. Korobko 3, V. Bilyk 3, V. Efremov 4 1 Kaunas University of Technology, Kęstučio 7, LT-4431,
666. Controllable vibro-protective system for the driver seat of a multi-axis vehicle A. Bubulis 1, G. Reizina, E. Korobko 3, V. Bilyk 3, V. Efremov 4 1 Kaunas University of Technology, Kęstučio 7, LT-4431,
To conduct the experiment, each person in your group should be given a role:
 Varying Motion NAME In this activity, your group of 3 will collect data based on one person s motion. From this data, you will create graphs comparing displacement, velocity, and acceleration to time.
Varying Motion NAME In this activity, your group of 3 will collect data based on one person s motion. From this data, you will create graphs comparing displacement, velocity, and acceleration to time.
Traffic Management and Control (ENGC 6340) Dr. Essam almasri. 8. Macroscopic
 Dr. Essam almasri. 8. Macroscopic") 8. Macroscopic Traffic Modeling Introduction In traffic stream characteristics chapter we learned that the fundamental relation (q=k.u) and the fundamental diagrams enable us to describe the traffic state
8. Macroscopic Traffic Modeling Introduction In traffic stream characteristics chapter we learned that the fundamental relation (q=k.u) and the fundamental diagrams enable us to describe the traffic state
Research on Heat Conduction Inverse Problem of Continuous Long Downhill Truck Brake
 International Conference on Civil, Transportation and Environment (ICCTE 2016) Research on Heat Conduction Inverse Problem of Continuous Long Downhill Truck Brake Shun Zeng1, a,heng Zhang2,b,Yunwei Meng1,c
International Conference on Civil, Transportation and Environment (ICCTE 2016) Research on Heat Conduction Inverse Problem of Continuous Long Downhill Truck Brake Shun Zeng1, a,heng Zhang2,b,Yunwei Meng1,c
National Quali cations 2018
 H FOR X723/76/01 OFFICIAL USE National Quali cations 2018 Mark Engineering Science THURSDAY, 24 MAY 1:00 PM 3:00 PM *X7237601* Fill in these boxes and read what is printed below. Full name of centre Town
H FOR X723/76/01 OFFICIAL USE National Quali cations 2018 Mark Engineering Science THURSDAY, 24 MAY 1:00 PM 3:00 PM *X7237601* Fill in these boxes and read what is printed below. Full name of centre Town
PHY321 Homework Set 2
 PHY321 Homework Set 2 1. [5 pts] Consider the forces from the previous homework set, F A ( r )and F B ( r ), acting on a particle. The force components depend on position r of the particle according to
PHY321 Homework Set 2 1. [5 pts] Consider the forces from the previous homework set, F A ( r )and F B ( r ), acting on a particle. The force components depend on position r of the particle according to
P3 Revision Questions
 P3 Revision Questions Part 1 Question 1 What is a kilometre? Answer 1 1000metres Question 2 What is meant by an average speed? Answer 2 The average distance covered per second Question 3 How do speed cameras
P3 Revision Questions Part 1 Question 1 What is a kilometre? Answer 1 1000metres Question 2 What is meant by an average speed? Answer 2 The average distance covered per second Question 3 How do speed cameras
Traffic signal design-ii
 CHAPTER 4. TRAFFIC SIGNAL DESIGN-II NPTEL May 3, 007 Chapter 4 Traffic signal design-ii 4.1 Overview In the previous chapter, a simple design of cycle time was discussed. Here we will discuss how the cycle
CHAPTER 4. TRAFFIC SIGNAL DESIGN-II NPTEL May 3, 007 Chapter 4 Traffic signal design-ii 4.1 Overview In the previous chapter, a simple design of cycle time was discussed. Here we will discuss how the cycle
Modeling Traffic Flow for Two and Three Lanes through Cellular Automata
 International Mathematical Forum, Vol. 8, 2013, no. 22, 1091-1101 HIKARI Ltd, www.m-hikari.com http://dx.doi.org/10.12988/imf.2013.3486 Modeling Traffic Flow for Two and Three Lanes through Cellular Automata
International Mathematical Forum, Vol. 8, 2013, no. 22, 1091-1101 HIKARI Ltd, www.m-hikari.com http://dx.doi.org/10.12988/imf.2013.3486 Modeling Traffic Flow for Two and Three Lanes through Cellular Automata
Modeling: Start to Finish
 A model for Vehicular Stopping Distance 64 Modeling: Start to Finish Example. Vehicular Stopping Distance Background: In driver s training, you learn a rule for how far behind other cars you are supposed
A model for Vehicular Stopping Distance 64 Modeling: Start to Finish Example. Vehicular Stopping Distance Background: In driver s training, you learn a rule for how far behind other cars you are supposed
Proceedings of the 2015 Winter Simulation Conference L. Yilmaz, W. K. V. Chan, I. Moon, T. M. K. Roeder, C. Macal, and M. D. Rossetti, eds.
 Proceedings of the 2015 Winter Simulation Conference L. Yilmaz, W. K. V. Chan, I. Moon, T. M. K. Roeder, C. Macal, and M. D. Rossetti, eds. EVALUATING ADVANTAGE OF SHARING INFORMATION AMONG VEHICLES TOWARD
Proceedings of the 2015 Winter Simulation Conference L. Yilmaz, W. K. V. Chan, I. Moon, T. M. K. Roeder, C. Macal, and M. D. Rossetti, eds. EVALUATING ADVANTAGE OF SHARING INFORMATION AMONG VEHICLES TOWARD
Created by T. Madas CALCULUS KINEMATICS. Created by T. Madas
 CALCULUS KINEMATICS CALCULUS KINEMATICS IN SCALAR FORM Question (**) A particle P is moving on the x axis and its acceleration a ms, t seconds after a given instant, is given by a = 6t 8, t 0. The particle
CALCULUS KINEMATICS CALCULUS KINEMATICS IN SCALAR FORM Question (**) A particle P is moving on the x axis and its acceleration a ms, t seconds after a given instant, is given by a = 6t 8, t 0. The particle
Optimizing traffic flow on highway with three consecutive on-ramps
 2012 Fifth International Joint Conference on Computational Sciences and Optimization Optimizing traffic flow on highway with three consecutive on-ramps Lan Lin, Rui Jiang, Mao-Bin Hu, Qing-Song Wu School
2012 Fifth International Joint Conference on Computational Sciences and Optimization Optimizing traffic flow on highway with three consecutive on-ramps Lan Lin, Rui Jiang, Mao-Bin Hu, Qing-Song Wu School
Choosing a Safe Vehicle Challenge: Analysis: Measuring Speed Challenge: Analysis: Reflection:
 Activity 73: Choosing a Safe Vehicle Challenge: Which vehicle do you think is safer? 1. Compare the features you listed in the data evidence section to the features listed on the worksheet. a. How are
Activity 73: Choosing a Safe Vehicle Challenge: Which vehicle do you think is safer? 1. Compare the features you listed in the data evidence section to the features listed on the worksheet. a. How are
(a) (i) There is a lift inside the building. The lift travels at a mean velocity of 10 m/s.
 (i) There is a lift inside the building. The lift travels at a mean velocity of 10 m/s.") Q. The world s tallest building is in Dubai. By Nicolas Lannuzel [CC BY-SA 2.0], via Flickr (a) (i) There is a lift inside the building. The lift travels at a mean velocity of 0 m/s. When the lift is carrying
Q. The world s tallest building is in Dubai. By Nicolas Lannuzel [CC BY-SA 2.0], via Flickr (a) (i) There is a lift inside the building. The lift travels at a mean velocity of 0 m/s. When the lift is carrying
Assignment 4:Rail Analysis and Stopping/Passing Distances
 CEE 3604: Introduction to Transportation Engineering Fall 2012 Date Due: September 28, 2012 Assignment 4:Rail Analysis and Stopping/Passing Distances Instructor: Trani Problem 1 You are ased to evaluate
CEE 3604: Introduction to Transportation Engineering Fall 2012 Date Due: September 28, 2012 Assignment 4:Rail Analysis and Stopping/Passing Distances Instructor: Trani Problem 1 You are ased to evaluate
Signalized Intersection Delay Models
 Transportation System Engineering 56. Signalized Intersection Delay Models Chapter 56 Signalized Intersection Delay Models 56.1 Introduction Signalized intersections are the important points or nodes within
Transportation System Engineering 56. Signalized Intersection Delay Models Chapter 56 Signalized Intersection Delay Models 56.1 Introduction Signalized intersections are the important points or nodes within
Traffic Modelling for Moving-Block Train Control System
 Commun. Theor. Phys. (Beijing, China) 47 (2007) pp. 601 606 c International Academic Publishers Vol. 47, No. 4, April 15, 2007 Traffic Modelling for Moving-Block Train Control System TANG Tao and LI Ke-Ping
Commun. Theor. Phys. (Beijing, China) 47 (2007) pp. 601 606 c International Academic Publishers Vol. 47, No. 4, April 15, 2007 Traffic Modelling for Moving-Block Train Control System TANG Tao and LI Ke-Ping
P2a Acceleration and Motion Graphs Foundation
 P2a Acceleration and Motion Graphs Foundation 46 minutes 46 marks Page 1 of 12 Q1. (a) The diagram shows two forces acting on an object. What is the resultant force acting on the object? Tick ( ) one box.
P2a Acceleration and Motion Graphs Foundation 46 minutes 46 marks Page 1 of 12 Q1. (a) The diagram shows two forces acting on an object. What is the resultant force acting on the object? Tick ( ) one box.
Signalized Intersection Delay Models
 hapter 56 Signalized Intersection Delay Models 56.1 Introduction Signalized intersections are the important points or nodes within a system of highways and streets. To describe some measure of effectiveness
hapter 56 Signalized Intersection Delay Models 56.1 Introduction Signalized intersections are the important points or nodes within a system of highways and streets. To describe some measure of effectiveness
Lateral Path-Following Control for Automated Vehicle Platoons
 Lateral Path-Following Control for Automated Vehicle Platoons Master of Science Thesis Delft Center for Systems and Control Lateral Path-Following Control for Automated Vehicle Platoons Master of Science
Lateral Path-Following Control for Automated Vehicle Platoons Master of Science Thesis Delft Center for Systems and Control Lateral Path-Following Control for Automated Vehicle Platoons Master of Science
ANSWERS AND MARK SCHEMES. (a) 750 MJ / 750,000,000 J 1 ½ 150, (a) 80 N in the direction of motion / 80 N forward. 1
 750 MJ / 750,000,000 J 1 ½ 150, (a) 80 N in the direction of motion / 80 N forward. 1") QUESTIONSHEET 1 (a) 750 MJ / 750,000,000 J 1 ½ 150,000 100 2 1 (b) engine thrust / jet thrust 1 weight of plane / downward force of plane due to gravity 1 (c) 500,000 d = 750 000 000 1 d = 1500 m 1 + 1
QUESTIONSHEET 1 (a) 750 MJ / 750,000,000 J 1 ½ 150,000 100 2 1 (b) engine thrust / jet thrust 1 weight of plane / downward force of plane due to gravity 1 (c) 500,000 d = 750 000 000 1 d = 1500 m 1 + 1
End of chapter exercises
 End of chapter exercises Problem 1: Give one word/term for the following descriptions. 1. The shortest path from start to finish. 2. A physical quantity with magnitude and direction. 3. The quantity defined
End of chapter exercises Problem 1: Give one word/term for the following descriptions. 1. The shortest path from start to finish. 2. A physical quantity with magnitude and direction. 3. The quantity defined
Vehicle Motion Equations:
 1 Vehicle Motion Equations: v = at + v (2.2.4) x x = v2 2 v 2a (2.2.6) v 2 = v 2 + 2a(x x ) (2.2.6) x = 1 2 at2 + v t + x (2.2.7) D b = x cos α (2.2.10) x = vt D b = v 2 v 2 2g(f G) (2.2.14) e + f s =
1 Vehicle Motion Equations: v = at + v (2.2.4) x x = v2 2 v 2a (2.2.6) v 2 = v 2 + 2a(x x ) (2.2.6) x = 1 2 at2 + v t + x (2.2.7) D b = x cos α (2.2.10) x = vt D b = v 2 v 2 2g(f G) (2.2.14) e + f s =
CDS 101: Lecture 2.1 System Modeling. Lecture 1.1: Introduction Review from to last Feedback week and Control
 CDS 101: Lecture 2.1 System Modeling Richard M. Murray 7 October 2002 Goals: Describe what a model is and what types of questions it can be used to answer Introduce the concepts of state, dynamic, and
CDS 101: Lecture 2.1 System Modeling Richard M. Murray 7 October 2002 Goals: Describe what a model is and what types of questions it can be used to answer Introduce the concepts of state, dynamic, and
Measuring Motion. Day 1
 Measuring Motion Day 1 Objectives I will identify the relationship between motion and a reference point I will identify the two factors that speed depends on I will determine the difference between speed
Measuring Motion Day 1 Objectives I will identify the relationship between motion and a reference point I will identify the two factors that speed depends on I will determine the difference between speed
5) A stone is thrown straight up. What is its acceleration on the way up? 6) A stone is thrown straight up. What is its acceleration on the way down?
 A stone is thrown straight up. What is its acceleration on the way up? 6) A stone is thrown straight up. What is its acceleration on the way down?") 5) A stone is thrown straight up. What is its acceleration on the way up? Answer: 9.8 m/s 2 downward 6) A stone is thrown straight up. What is its acceleration on the way down? Answer: 9.8 m/ s 2 downward
5) A stone is thrown straight up. What is its acceleration on the way up? Answer: 9.8 m/s 2 downward 6) A stone is thrown straight up. What is its acceleration on the way down? Answer: 9.8 m/ s 2 downward
Chapter 2 Motion in One Dimension
 Chapter 2 Motion in One Dimension Multiple Choice 1. The position of a particle moving along the x axis is given by 2 x = ( 21+ 22t 6 0. t )m, where t is in s. What is the average velocity during the time
Chapter 2 Motion in One Dimension Multiple Choice 1. The position of a particle moving along the x axis is given by 2 x = ( 21+ 22t 6 0. t )m, where t is in s. What is the average velocity during the time
Data-based fuel-economy optimization of connected automated trucks in traffic
 218 Annual American Control Conference ACC) June 27 29, 218. Wisconsin Center, Milwaukee, USA Data-based fuel-economy optimization of connected automated trucks in traffic Chaozhe R. He, Jin I. Ge, and
218 Annual American Control Conference ACC) June 27 29, 218. Wisconsin Center, Milwaukee, USA Data-based fuel-economy optimization of connected automated trucks in traffic Chaozhe R. He, Jin I. Ge, and
Parking Regulations Dundas Street West, from Bathurst Street to Dovercourt Road
 STAFF REPORT ACTION REQUIRED Parking Regulations Dundas Street West, from Bathurst Street to Dovercourt Road Date: October 28, 2008 To: From: Toronto and East York Community Council Director, Transportation
STAFF REPORT ACTION REQUIRED Parking Regulations Dundas Street West, from Bathurst Street to Dovercourt Road Date: October 28, 2008 To: From: Toronto and East York Community Council Director, Transportation
Performance Analysis of Delay Estimation Models for Signalized Intersection Networks
 Performance Analysis of Delay Estimation Models for Signalized Intersection Networks Hyung Jin Kim 1, Bongsoo Son 2, Soobeom Lee 3 1 Dept. of Urban Planning and Eng. Yonsei Univ,, Seoul, Korea {hyungkim,
Performance Analysis of Delay Estimation Models for Signalized Intersection Networks Hyung Jin Kim 1, Bongsoo Son 2, Soobeom Lee 3 1 Dept. of Urban Planning and Eng. Yonsei Univ,, Seoul, Korea {hyungkim,
Xiaoguang Wang, Assistant Professor, Department of Geography, Central Michigan University Chao Liu,
 Xiaoguang Wang, Email: wang9x@cmich.edu Assistant Professor, Department of Geography, Central Michigan University Chao Liu, Email: cliu8@umd.edu Research Associate, National Center for Smart Growth, Research
Xiaoguang Wang, Email: wang9x@cmich.edu Assistant Professor, Department of Geography, Central Michigan University Chao Liu, Email: cliu8@umd.edu Research Associate, National Center for Smart Growth, Research
How reaction time, update time and adaptation time influence the stability of traffic flow
 How reaction time, update time and adaptation time influence the stability of traffic flow Arne Kesting and Martin Treiber Technische Universität Dresden, Andreas-Schubert-Straße 3, 16 Dresden, Germany
How reaction time, update time and adaptation time influence the stability of traffic flow Arne Kesting and Martin Treiber Technische Universität Dresden, Andreas-Schubert-Straße 3, 16 Dresden, Germany
Answers to Problem Set Number 02 for MIT (Spring 2008)
") Answers to Problem Set Number 02 for 18.311 MIT (Spring 2008) Rodolfo R. Rosales (MIT, Math. Dept., room 2-337, Cambridge, MA 02139). March 10, 2008. Course TA: Timothy Nguyen, MIT, Dept. of Mathematics,
Answers to Problem Set Number 02 for 18.311 MIT (Spring 2008) Rodolfo R. Rosales (MIT, Math. Dept., room 2-337, Cambridge, MA 02139). March 10, 2008. Course TA: Timothy Nguyen, MIT, Dept. of Mathematics,
A Study on Performance Analysis of V2V Communication Based AEB System Considering Road Friction at Slopes
 , pp. 71-80 http://dx.doi.org/10.14257/ijfgcn.2016.9.11.07 A Study on Performance Analysis of V2V Communication Based AEB System Considering Road Friction at Slopes Sangduck Jeon 1, Jungeun Lee 1 and Byeongwoo
, pp. 71-80 http://dx.doi.org/10.14257/ijfgcn.2016.9.11.07 A Study on Performance Analysis of V2V Communication Based AEB System Considering Road Friction at Slopes Sangduck Jeon 1, Jungeun Lee 1 and Byeongwoo
Unit D Energy-Analysis Questions
 Unit D Energy-Analysis Questions Activity 53-Home Energy Use 1. How do Climates of the two home locations influence the energy used in the homes? 2. In the context of this activity, what does the term
Unit D Energy-Analysis Questions Activity 53-Home Energy Use 1. How do Climates of the two home locations influence the energy used in the homes? 2. In the context of this activity, what does the term
Interactive Traffic Simulation
 Interactive Traffic Simulation Microscopic Open-Source Simulation Software in Javascript Martin Treiber and Arne Kesting July 2017 Traffic and congestion phenomena belong to our everyday experience. Our
Interactive Traffic Simulation Microscopic Open-Source Simulation Software in Javascript Martin Treiber and Arne Kesting July 2017 Traffic and congestion phenomena belong to our everyday experience. Our
Modelling and Simulation for Train Movement Control Using Car-Following Strategy
 Commun. Theor. Phys. 55 (2011) 29 34 Vol. 55, No. 1, January 15, 2011 Modelling and Simulation for Train Movement Control Using Car-Following Strategy LI Ke-Ping (Ó ), GAO Zi-You (Ô Ð), and TANG Tao (»
Commun. Theor. Phys. 55 (2011) 29 34 Vol. 55, No. 1, January 15, 2011 Modelling and Simulation for Train Movement Control Using Car-Following Strategy LI Ke-Ping (Ó ), GAO Zi-You (Ô Ð), and TANG Tao (»
AKTIVE SICHERHEIT 4.0. Prof. K. Kompass, Dr. S. Nitsche April 2017
 AKTIVE SICHERHEIT 4.0 Prof. K. Kompass, Dr. S. Nitsche April 2017 L e v e l of p e r f o r m a n c e ASSISTED AND AUTOMATED DRIVING HIGHER LEVELS OF AUTOMATION ACTIVE SAFETY L e v e l of a u t o m a t
AKTIVE SICHERHEIT 4.0 Prof. K. Kompass, Dr. S. Nitsche April 2017 L e v e l of p e r f o r m a n c e ASSISTED AND AUTOMATED DRIVING HIGHER LEVELS OF AUTOMATION ACTIVE SAFETY L e v e l of a u t o m a t
An extended microscopic traffic flow model based on the spring-mass system theory
 Modern Physics Letters B Vol. 31, No. 9 (2017) 1750090 (9 pages) c World Scientific Publishing Company DOI: 10.1142/S0217984917500907 An extended microscopic traffic flow model based on the spring-mass
Modern Physics Letters B Vol. 31, No. 9 (2017) 1750090 (9 pages) c World Scientific Publishing Company DOI: 10.1142/S0217984917500907 An extended microscopic traffic flow model based on the spring-mass