Treatment of Epistemic and Aleatory Uncertainties with OpenCOSSAN and COSSAN-X
|
|
|
- Cora Cole
- 5 years ago
- Views:
Transcription
1 Treatment of Epistemic and Aleatory Uncertainties with OpenCOSSAN and COSSAN-X Summer School Graduiertenkolleg 1462 Matteo Broggi Institut für Risiko und Zuverlässigkeit Leibniz Universität Hannover
2 Outline 1 Introduction 2 Cossan Software 3 OpenCossan demonstration 4 Selected Research DLR-AIRMOD The NASA UQ Challenge Problem 5 Conclusions M.Broggi 1


3 First of all... A huge acknowledgement! M.Broggi 2

4 Analyses with Uncertainties Predictive mathematical and numerical models Can contain a fairly large set of parameters True" values are not precisely known, i.e. they are uncertain. M.Broggi 3


5 Institute for Analyses with Uncertainties Predictive mathematical and numerical models Can contain a fairly large set of parameters True" values are not precisely known, i.e. they are uncertain. M.Broggi 3

6 Analyses with Uncertainties Predictive mathematical and numerical models Can contain a fairly large set of parameters True" values are not precisely known, i.e. they are uncertain. M.Broggi 3
7 and Risk Analysis in Engineering General concepts Engineers need to assure that engineered systems, components and structures provide acceptable levels of safety. Requires a proper Risk analysis and management Risk assessment tools A systematic and comprehensive methodology to evaluate risks associated with a complex engineered technological entity Failure modes and effects analysis Event tree Fault tree analysis and Availability analysis... M.Broggi 4
8 and Risk Analysis in Engineering Statistical analysis Accidental statistics and historical data are used by industry (essential tools for management) monitor risk and safety level identify hazards analyse accident causes evaluate effect of risk reducing measures... M.Broggi 5

9 Uncertainties in Engineering systems Irreducible (aleatory) uncertainties Parameters intrinsically uncertain Value varies at each experiment Future environmental conditions, chaotic and stochastic process M.Broggi 6
10 Uncertainties in Engineering systems Reducible (epistemic) uncertainties Quantities that could be in theory fully determined Practically they are not available Too expensive, only destructive measurement, etc. M.Broggi 7

11 Uncertainties in Engineering systems M.Broggi 8


12 Uncertainties in Engineering systems M.Broggi 8


13 Uncertainties in Engineering systems M.Broggi 8
14 Dealing with Uncertainties Quantifying Uncertainty Modelling and refinement of uncertainty based on experimental data, simulations and/or expert opinion Propagation of mixed aleatory and epistemic uncertainties through system models Parameter ranking and sensitivity analysis in the presence of uncertainty M.Broggi 9

15 Dealing with Uncertainties Managing Uncertainty Identification of the parameters whose uncertainty is the most/least consequential Worst-case system performance assessment Design in the presence of uncertainty M.Broggi 10
 M.")
16 Epistemic uncertainties Different levels of information Model the unknowns without introducing unjustified assumptions Limited experimental data Qualitative and heterogeneous information (expert judgements, constrasting sources) M.Broggi 11
 M.")
17 Epistemic uncertainties Different levels of information Model the unknowns without introducing unjustified assumptions Limited experimental data Qualitative and heterogeneous information (expert judgements, constrasting sources) M.Broggi 11
 M.")
18 Epistemic uncertainties Different levels of information Model the unknowns without introducing unjustified assumptions Limited experimental data Qualitative and heterogeneous information (expert judgements, constrasting sources) M.Broggi 11
19 Naive approach Treat epistemic uncertainties as aleatory uncertainties Example: Information available as only bounds assign uniform distribution CDF Failure Safe performance M.Broggi 12
20 Naive approach Treat epistemic uncertainties as aleatory uncertainties Example: Information available as only bounds assign uniform distribution CDF Failure Safe performance M.Broggi 12
21 Naive approach Treat epistemic uncertainties as aleatory uncertainties Example: Information available as only bounds assign uniform distribution CDF Failure Safe performance M.Broggi 12
22 Imprecise parameters M.Broggi 13
23 Imprecise parameters M.Broggi 13
24 Imprecise random numbers Different probability masses associated to distinct intervals (e.g. weighting expert options or assumptions) UQ by sampling intervals (solving an optimization problem for each sample) M.Broggi 14
25 Imprecise random numbers Different probability masses associated to distinct intervals (e.g. weighting expert options or assumptions) UQ by sampling intervals (solving an optimization problem for each sample) M.Broggi 14
26 Imprecise random variables Probability box 1 Beta pbox parameter: p1 0.9 [µ, σ ] beta CDFs [ µ +, σ + ] 0.3 [µ, σ + ] [ µ +, σ ] p1 Distributional p-box Distribution-free p-box M.Broggi 15
27 Analyses with Imprecise Probabilities Computational Challenges M.Broggi 16
28 Analyses with Imprecise Probabilities Computational Challenges M.Broggi 16





29 Analyses with Imprecise Probabilities Computational Challenges M.Broggi 16
30 Outline 1 Introduction 2 Cossan Software 3 OpenCossan demonstration 4 Selected Research DLR-AIRMOD The NASA UQ Challenge Problem 5 Conclusions M.Broggi 17
 Transfer of stochastic simulation methods into engineering practice M.")
31 COSSAN History and developments Early recognition of the need of: Numerically efficient Monte Carlo methods Innovative software to solve to realistic, industry-size problems COSSAN (COmputational Stochastic Stuctural ANalises) Transfer of stochastic simulation methods into engineering practice M.Broggi 18
32 COSSAN software Past development ISPUD (Importance sampling using design points) COSSAN-A (Stand alone software) COSSAN-B (Interaction with 3rd party solvers) development of next generation of COSSAN M.Broggi 19
33 COSSAN software Past development ISPUD (Importance sampling using design points) COSSAN-A (Stand alone software) COSSAN-B (Interaction with 3rd party solvers) development of next generation of COSSAN M.Broggi 19
 COSSAN-B (Interaction with 3rd party solvers) 2006-2011 development of next generation of COSSAN M.")
34 COSSAN software Past development ISPUD (Importance sampling using design points) COSSAN-A (Stand alone software) COSSAN-B (Interaction with 3rd party solvers) development of next generation of COSSAN M.Broggi 19
 COSSAN-B (Interaction with 3rd party solvers) 2006-2011 development of next generation of COSSAN M.")
35 COSSAN software Past development ISPUD (Importance sampling using design points) COSSAN-A (Stand alone software) COSSAN-B (Interaction with 3rd party solvers) development of next generation of COSSAN M.Broggi 19
36 COSSAN software Past development ISPUD (Importance sampling using design points) COSSAN-A (Stand alone software) COSSAN-B (Interaction with 3rd party solvers) development of next generation of COSSAN User Interfaces General Purpose high-level plug-ins for Graphical User programming FE-packages Interface language Software core components Toolboxes Applications Algorithms and tools solution sequences Interaction with 3rd party software Input / output files FE-package manipulation (solver) M.Broggi 19




37 COSSAN Software COSSAN-X and OpenCossan from 2011 hosted at University of Liverpool 2012 First Release of OpenCossan 2014 New developments for iepistemic uncertainties 2016 Liverpool-Hannover joint development M.Broggi 20
38 COSSAN-X Next generation software for numerical simulation and uncertainty management Integrate legacy stand-alone applications General Purpose Software User friendly interfaces Open I/O formats Include efficient algorithms/methods Better interoperation with 3rd party software High-fidelity analysis General Purpose Graphical User Interface Software core components Toolboxes Algorithms and tools Input / output files manipulation User Interfaces high-level programming language plug-ins for FE-packages Applications solution sequences Interaction with 3rd party software FE-package (solver) M.Broggi 21

39 General purpose graphical user interfaces Coded in Eclipse RCP Multiplatform native interfaces Help, wizards and graphical tools Provide guidance to the users at every step of the analysis M.Broggi 22

40 General purpose graphical user interfaces Coded in Eclipse RCP Multiplatform native interfaces Help, wizards and graphical tools Provide guidance to the users at every step of the analysis M.Broggi 22

41 General purpose graphical user interfaces Problem definition M.Broggi 23

42 General purpose graphical user interfaces Problem definition M.Broggi 23

")
43 General purpose graphical user interfaces Wizards (to define analyses) M.Broggi 24

44 General purpose graphical user interfaces Output visualization M.Broggi 25
45 Tools and algorithms COSSAN-X and OpenCOSSAN Toolbox Optimization Meta-modelling Sensitivity Main algorithms and procedures Monte Carlo, LatinHyperCube Sampling, Sobol Sampling, Halton Sampling, Line Sampling, Subset simulation and approximate methods (FORM, bounds) BFGS, COBYLA, Cross Entropy, Evolution Strategies, Genetic Algorithms, MiniMax, Simplex, Simulated Annealing, SQP, Stochastic Ranking Artificial Neural Networks, Response Surface, Polyharmonic Splines, polynomial-chaos Local (finite differences, Monte Carlo), Global (Sobol and Total indices, upper bounds) M.Broggi 26
46 Tools and agorithms OpenCOSSAN The following new feature are available and in development Toolbox Uncertainty quantification and propagation System Meta-Model Main algorithms and procedures Imprecise probabilities, Model Updating, Sensitivity with p-boxes Subset-infinite, Advanced line Sampling Bayesian Networks (crisp and imprecise), Survival Signature (crisp and imprecise) Gaussian process, Interval Predictor Model M.Broggi 27
 dx P f = I F (x) g X f X (x) g X (x) dx ˆP f = 1 N I F (X (k) )w(x (k) ) N k=1 M.")
47 Advanced Monte Carlo Simulation Importance Sampling Line Sampling Subset Simulation P f = I F (x) f X (x) dx P f = I F (x) g X f X (x) g X (x) dx ˆP f = 1 N I F (X (k) )w(x (k) ) N k=1 M.Broggi 28
 f N L Φ( c (i) ) i=1 M.")
48 Advanced Monte Carlo Simulation Importance Sampling Line Sampling Subset Simulation ˆP f = 1 N L ˆP f = 1 N L N L i=1 p (i) f N L Φ( c (i) ) i=1 M.Broggi 28
 m 1 F i P (F 1 ) P (F i+1 F i ) i=1 M.")
49 Advanced Monte Carlo Simulation Importance Sampling Line Sampling Subset Simulation ˆP f = P ( m i=1 ) m 1 F i P (F 1 ) P (F i+1 F i ) i=1 M.Broggi 28

50 Surrogate models Approximation of input/output relations with simple mathematical expression Response surface Kriging / Gaussian Process Artificial Neural Networks Polyharmonic Splines Interval Predictor Model M.Broggi 29

51 Surrogate models Approximation of input/output relations with simple mathematical expression Response surface Kriging / Gaussian Process Artificial Neural Networks Polyharmonic Splines Interval Predictor Model M.Broggi 29
52 Surrogate models Approximation of input/output relations with simple mathematical expression Response surface Kriging / Gaussian Process Artificial Neural Networks Polyharmonic Splines Interval Predictor Model M.Broggi 29


53 Interaction with 3rd party software Third party software are considered as black-boxes ASCII input/output files manipulation M.Broggi 30
 Injector (Input files) / Extractor (output file) M.")
54 Interaction with 3rd party software User friendly editors (Human readable XML tags) Injector (Input files) / Extractor (output file) M.Broggi 31
 Injector (Input files) / Extractor (output file) M.")
55 Interaction with 3rd party software User friendly editors (Human readable XML tags) Injector (Input files) / Extractor (output file) M.Broggi 31
56 OpenCossan Open Matlab toolkit for risk and uncertainty quantification Programmed object oriented fashion in MATLAB Open Source Allows to control, modify, and implement new algorithms/tools M.Broggi 32



57 OpenCossan Open Matlab toolkit for risk and uncertainty quantification Programmed object oriented fashion in MATLAB Open Source Allows to control, modify, and implement new algorithms/tools Modular Framework: easy to use/reuse components No need to reinvent the wheel M.Broggi 32


58 OpenCossan Intuitive and Flexible toolbox M.Broggi 33

59 OpenCossan Parallelization Solutions 1 Loop Parallelism shared memory multicore use Matlab parfor command 2 Job parallelism Distributed memory cluster independent jobs sent through GridEngine 3 Hybrid Job+Loop parallelism Each job start a pool of Matlab workers M.Broggi 34

60 OpenCossan Parallelization Solutions 1 Loop Parallelism shared memory multicore use Matlab parfor command 2 Job parallelism Distributed memory cluster independent jobs sent through GridEngine 3 Hybrid Job+Loop parallelism Each job start a pool of Matlab workers M.Broggi 34


61 OpenCossan Parallelization Solutions 1 Loop Parallelism shared memory multicore use Matlab parfor command 2 Job parallelism Distributed memory cluster independent jobs sent through GridEngine 3 Hybrid Job+Loop parallelism Each job start a pool of Matlab workers M.Broggi 34
62 Collaborative development Documentation Open Documentation based on MediaWiki Theory manual Learn-by examples Tutorials and examples Reference Manual M.Broggi 35

63 Collaborative development Code development Based on Apache Subversion (SVN) Software versioning and revision control system Maintain versions of the files such as source code, web pages, and documentation. JENKINS Integration tool Automatically validate every new proposed code change TRAC system Effective way to track issues and software bugs M.Broggi 36

64 Collaborative development Code development Based on Apache Subversion (SVN) Software versioning and revision control system Maintain versions of the files such as source code, web pages, and documentation. JENKINS Integration tool Automatically validate every new proposed code change TRAC system Effective way to track issues and software bugs M.Broggi 36
65 Collaborative development Code development Based on Apache Subversion (SVN) Software versioning and revision control system Maintain versions of the files such as source code, web pages, and documentation. JENKINS Integration tool Automatically validate every new proposed code change TRAC system Effective way to track issues and software bugs M.Broggi 36
66 Outline 1 Introduction 2 Cossan Software 3 OpenCossan demonstration 4 Selected Research DLR-AIRMOD The NASA UQ Challenge Problem 5 Conclusions M.Broggi 37
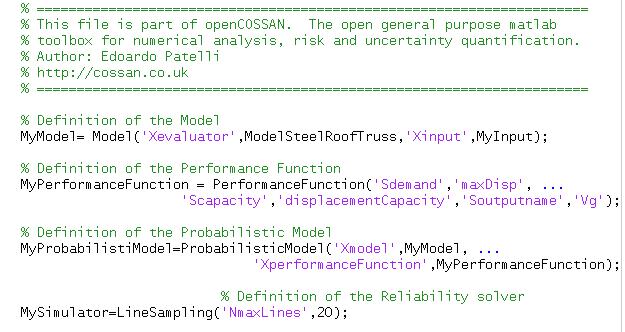
67 Switch to MATLAB for a quick demo of OpenCossan M.Broggi 38
68 Outline 1 Introduction 2 Cossan Software 3 OpenCossan demonstration 4 Selected Research DLR-AIRMOD The NASA UQ Challenge Problem 5 Conclusions M.Broggi 39



69 Institute for Model updating of the DLR Airmod Replica of GARTEUR SM-AG19 benchmark structure 2m wingspan, 1.5m length, 0.46m height, 44kg weight Disassembled and reassembled 130 times (86 tests usable) Excited with random signal in the frequency Hz M.Broggi 40
70 Numerical model Scope Modeled in MSC.NASTRAN 3136 grid points 1446 solid elements (CHEXA, CPENTA) for the main aluminium structure 561 CELAS1 for joints modelling 73 concentrated mass for cables, instrumentation Comparison between Covariance Model Updating (Frequentist updating, optimization based) and Transitional Markov Chain Monte-Carlo (Bayesian updating) M.Broggi 41
71 Numerical model M.Broggi 42

72 Uncertain Parameters M.Broggi 43
73 Bayesian Updating Due to excessive time required by TMCMC a Neural Network has been employed Step 1 Uniform prior for TMCMC, Neural Network calibration data Calibration: LHS samples TMCMC: 500 Markov chain (convergence in 29 steps) Parallelization of LHS and of Markov chains Validation of posterior results running the full FE model Step 2 New prior distribution of the input parameters Gaussian mixture distribution based on posterior of step 1 TMCMC with full FE model, 200 Markov chains Convergence in 5 steps M.Broggi 44

74 Numerical Results - Covariance and Bayesian Updating M.Broggi 45

75 Numerical Results - Covariance and Bayesian Updating M.Broggi 45
76 Numerical Results - Covariance and Bayesian Updating M.Broggi 45


77 Numerical Results - Covariance and Bayesian Updating M.Broggi 45

78 Numerical Results - Covariance and Bayesian Updating M.Broggi 45


79 Numerical Results - Posterior distribution of inputs M.Broggi 46

80 Numerical Results - Posterior distribution of inputs M.Broggi 46
81 Numerical Results - Posterior distribution of inputs M.Broggi 46


82 Numerical Results - Validation of results M.Broggi 47
83 Numerical Results - Validation of results Good performance when inputs are on a wide range Not enough calibration data in area of interest for posterior Poor R 2 values (< 0.5) Need new prior PDF with more data in this area Step 1 posterior used as new prior Full FE model used in next updating step to remove meta-model error M.Broggi 48
84 Numerical Results - Validation of results Good performance when inputs are on a wide range Not enough calibration data in area of interest for posterior Poor R 2 values (< 0.5) Need new prior PDF with more data in this area Step 1 posterior used as new prior Full FE model used in next updating step to remove meta-model error M.Broggi 48
85 Numerical Results - Validation of results Good performance when inputs are on a wide range Not enough calibration data in area of interest for posterior Poor R 2 values (< 0.5) Need new prior PDF with more data in this area Step 1 posterior used as new prior Full FE model used in next updating step to remove meta-model error M.Broggi 48

86 Numerical Results Step 2 M.Broggi 49
87 NASA Langley UQ challenge problem Motivations and Timeline Aim Determine limitations and ranges of applicability of existing UQ methodologies Develop new discipline-independent UQ methods Timeline January 2013: 100+ UQ experts were invited to participate January 2014: 11 groups presented at Scitech 2014 January 2015: Special edition AIAA Journal of Aerospace Information Systems Solving each problem with at least two different approaches Cross validate results Increase confidence Test different hypotheses Different numerical implementation M.Broggi 50
88 NASA Langley UQ challenge problem Motivations and Timeline Aim Determine limitations and ranges of applicability of existing UQ methodologies Develop new discipline-independent UQ methods Timeline January 2013: 100+ UQ experts were invited to participate January 2014: 11 groups presented at Scitech 2014 January 2015: Special edition AIAA Journal of Aerospace Information Systems Solving each problem with at least two different approaches Cross validate results Increase confidence Test different hypotheses Different numerical implementation M.Broggi 50

89 Physical System NASA Langley Generic Transport Model (GTM) The GTM is a 5.5% dynamically scaled, remotely piloted, twin-turbine, research aircraft used to conduct experiments for the NASA Aviation Safety Program Aircraft motion that extends outside the normal flight envelope the dynamics are driven by nonlinearities and coupling, having oscillatory and divergent behaviour M.Broggi 51

90 Generic Transport Model (GTM) Dynamically scaled, highly instrumented, flight test article M.Broggi 52
 g = f(p, x) 21 Uncertain Parameters p: loss in control effectiveness, actuator failure, icing, deadzone, and desired range in operating conditions 5 Intermediate variables")
91 The mathematical Model Black-box model Specialized aircraft knowledge is not required 5 tasks: Uncertainty Characterization, Sensitivity analysis, Uncertainty Quantification, Extreme Case analysis and Robust Design x = h(p) g = f(p, x) 21 Uncertain Parameters p: loss in control effectiveness, actuator failure, icing, deadzone, and desired range in operating conditions 5 Intermediate variables x (e.g. control effectiveness of elevator, time delay due telemetry and communications) 14 Design variables d: controller gains 8 Performance metrics g (e.g. Lon stability, lat/dir stability, elevator actuation) M.Broggi 53
92 Uncertain Parameters (p) Challenges Uncertainty models for p are given at. I Random Variables (aleatory uncertainty) at. II Intervals (epistemic uncertainty) at. III Probability boxes (aleatory + epistemic uncertainty) Some of these Uncertainty Models can be reduced/improved The propagation of p for a fixed d makes g a p-box M.Broggi 54
93 Uncertain Parameters (p) Challenges Uncertainty models for p are given at. I Random Variables (aleatory uncertainty) at. II Intervals (epistemic uncertainty) at. III Probability boxes (aleatory + epistemic uncertainty) Some of these Uncertainty Models can be reduced/improved The propagation of p for a fixed d makes g a p-box M.Broggi 54
94 Uncertainty Characterization Aim and strategy Refine the uncertainty model of p given n observations What is the effect of the number of observations n? aleatory space Ω αj epistemic space Θ 1 α Ij reduced θ epistemic space original epistemic space αi Ii Strategies Bayesian updating on the epistemic space Non-parametric statistical methods M.Broggi 55
95 Bayesian updating on the epistemic space Transitional Markov Chain Monte Carlo Adaptive MCMC algorithms used to explore the posterior distribution via sampling Do not sample directly from the posterior distribution Use intermediate distributions (weighted likelihood) Converge slowly to the posterior distribution Advantages Allows to deal with multi-modal or very peaked distributions Transitional Markov Chain Monte Carlo (TMCMC) J. Ching and Y.-C. Chen. Transitional Markov Chain Monte Carlo method for Bayesian updating, model class selection, and model averaging. Journal of Engineering Mechanics, 133: , 2007 M.Broggi 56



96 Reduced epistemic space Bayesian updating (25 observations) M.Broggi 57

 M.")
97 Reduced epistemic space Bayesian updating (50 observations) M.Broggi 58
, Physica-Verlag, Heidelberg, Germany, 1998. Klir, G.")
98 Sensitivity Analysis Pinching: reduce the width of an input interval / p-box, and evaluate reduction in output p-box Klir, G. J. and Wierman, M. J., Uncertainty-Based Information: Elements of Generalized Information Theory, Vol. 15 of Studies in Fuzziness and Soft Computing), Physica-Verlag, Heidelberg, Germany, Klir, G. J., Uncertainty and Information : Foundations of Generalized Information Theory, John Wiley and Sons, New Jersey, Alvarez, D. A., Reduction of uncertainty using sensitivity analysis methods for infinite random sets of indexable type, International Journal of Approximate Reasoning, Vol. 50, No. 5, 2009, pp M.Broggi 59
99 Sensitivity Analysis Pbox of x 1 after setting E[p 1 ] = 0.7 Pbox of x 2 after setting p 6 = Probability boxes corresponding to the original (thick lines) and pinched (thin lines) output probability boxes Pbox of x 3 after setting p 12 = Pbox of x 4 after setting p 16 = M.Broggi 60
100 Uncertainty Propagation Aim and strategy Aim Find the range of the metrics with reduced and improved models J 1 = E[w (p, d baseline )] and J 2 = 1 P [w (p, d baseline ) < 0] 21 input parameters (random variables, intervals, p-boxes) 8 performance functions Strategies: Approach A: propagate intervals obtained from given distribution-free p-boxes and construct Dempster-Shafer structure Approach B: global optimization in the epistemic space (search domain). Monte Carlo Simulation to estimate J 1 and J 2 M.Broggi 61
101 Approach A Solution Strategy Sample uniform numbers Monte Carlo Simulation D-S structure U(0,1) U(0,1) U(0,1) a 1 {i} a 2 {i} a 6 {i} a 1 {i} a 2 {i} a 6 {i} p1 p2 p6 Interval Propagation (Optimization) h(p) f(x) max(g) w {i} w {i} {i} {i} [w] =[w L, w U ] U(0,1) {i} a 21 {i} a 21 p21 [J 1 ] = 1 N N i [w] {i} [J 2 ] = 1 N N i [ ] I(w {i} L 0), I(w{i} U 0) M.Broggi 62
102 Approach B Solution Strategy m 1 m 2 Search feasible domain E a 21 v 1 b 21 I 6 Global Optimization a 1 {i} a 2 {i} p1 p2 v 2 h(p) f(x) max(g) w a 6 {i} a 2 {i} p6 p21 Monte Carlo Simulation {i} Empirical CDF {i} w 1 J S w {i} 1 = N i 1 {i} J 2 = S I(w >0) N i [ [J 1 ] = min E ] [ J 1, max J 1, [J 2 ] = E min E ] J 2, max J 2 E M.Broggi 63
103 Robust Design Aim and strategy Design Variable: 14 control parameters (d) Objective Function: minimize max(j 1 ) (expected value) Objective Function: minimize max(j 2 ) (failure probability) Computational challenges Each candidate solution: 3 days (i.e. max(j 1 ), max(j 2 )) Strategies: Surrogate model (Artificial Neural Networks) Optimizer: Genetic Algorithms (and BOBYQA) M.Broggi 64
 = 0.0044 (baseline 3.05) max(j 2 ) = 0.34 (baseline 0.41) d ANN w M.")
104 Robust Design Surrogate model (Artificial Neural Networks) Approximation of the most computationally expensive part Results: Inputs: x and d Outputs: g max(j 1 ) = (baseline 3.05) max(j 2 ) = 0.34 (baseline 0.41) d ANN w M.Broggi 65
105 Outline 1 Introduction 2 Cossan Software 3 OpenCossan demonstration 4 Selected Research DLR-AIRMOD The NASA UQ Challenge Problem 5 Conclusions M.Broggi 66
106 Summary Epistemic uncertainties allow UQ analysis with limited information Updating improves uncertainty model when experiments are available Sensitivity ranks uncertainty parameters and allow to ignore non important inputs helping simplifying model and analysis Advanced algorithms and meta-models make very computational intensive computations feasible M.Broggi 67
107 Summary COSSAN Software General purpose software with interaction with 3rd party solvers Advanced simulation methods for treatment of uncertainties High Performance Computing capabilities Different interfaces for advanced and inexperienced users Modular Framework: easy to use/reuse components M.Broggi 68


108 Summary COSSAN Software General purpose software with interaction with 3rd party solvers Advanced simulation methods for treatment of uncertainties High Performance Computing capabilities Different interfaces for advanced and inexperienced users Modular Framework: easy to use/reuse components M.Broggi 68
At A Glance. UQ16 Mobile App.
 At A Glance UQ16 Mobile App Scan the QR code with any QR reader and download the TripBuilder EventMobile app to your iphone, ipad, itouch or Android mobile device. To access the app or the HTML 5 version,
At A Glance UQ16 Mobile App Scan the QR code with any QR reader and download the TripBuilder EventMobile app to your iphone, ipad, itouch or Android mobile device. To access the app or the HTML 5 version,
Uncertainty Quantification in Performance Evaluation of Manufacturing Processes
 Uncertainty Quantification in Performance Evaluation of Manufacturing Processes Manufacturing Systems October 27, 2014 Saideep Nannapaneni, Sankaran Mahadevan Vanderbilt University, Nashville, TN Acknowledgement
Uncertainty Quantification in Performance Evaluation of Manufacturing Processes Manufacturing Systems October 27, 2014 Saideep Nannapaneni, Sankaran Mahadevan Vanderbilt University, Nashville, TN Acknowledgement
Uncertainty Management and Quantification in Industrial Analysis and Design
 Uncertainty Management and Quantification in Industrial Analysis and Design www.numeca.com Charles Hirsch Professor, em. Vrije Universiteit Brussel President, NUMECA International The Role of Uncertainties
Uncertainty Management and Quantification in Industrial Analysis and Design www.numeca.com Charles Hirsch Professor, em. Vrije Universiteit Brussel President, NUMECA International The Role of Uncertainties
How to Validate Stochastic Finite Element Models from Uncertain Experimental Modal Data Yves Govers
 How to Validate Stochastic Finite Element Models from Uncertain Experimental Modal Data Yves Govers Slide 1 Outline/ Motivation Validation of Finite Element Models on basis of modal data (eigenfrequencies
How to Validate Stochastic Finite Element Models from Uncertain Experimental Modal Data Yves Govers Slide 1 Outline/ Motivation Validation of Finite Element Models on basis of modal data (eigenfrequencies
IGD-TP Exchange Forum n 5 WG1 Safety Case: Handling of uncertainties October th 2014, Kalmar, Sweden
 IGD-TP Exchange Forum n 5 WG1 Safety Case: Handling of uncertainties October 28-30 th 2014, Kalmar, Sweden Comparison of probabilistic and alternative evidence theoretical methods for the handling of parameter
IGD-TP Exchange Forum n 5 WG1 Safety Case: Handling of uncertainties October 28-30 th 2014, Kalmar, Sweden Comparison of probabilistic and alternative evidence theoretical methods for the handling of parameter
Efficient Modelling of a Nonlinear Gust Loads Process for Uncertainty Quantification of Highly Flexible Aircraft
 Efficient Modelling of a Nonlinear Gust Loads Process for Uncertainty Quantification of Highly Flexible Aircraft SciTech, 8 th -12 th January 2018 Kissimmee, Florida Robert Cook, Chris Wales, Ann Gaitonde,
Efficient Modelling of a Nonlinear Gust Loads Process for Uncertainty Quantification of Highly Flexible Aircraft SciTech, 8 th -12 th January 2018 Kissimmee, Florida Robert Cook, Chris Wales, Ann Gaitonde,
Modelling Under Risk and Uncertainty
 Modelling Under Risk and Uncertainty An Introduction to Statistical, Phenomenological and Computational Methods Etienne de Rocquigny Ecole Centrale Paris, Universite Paris-Saclay, France WILEY A John Wiley
Modelling Under Risk and Uncertainty An Introduction to Statistical, Phenomenological and Computational Methods Etienne de Rocquigny Ecole Centrale Paris, Universite Paris-Saclay, France WILEY A John Wiley
Bayesian Methods for Machine Learning
 Bayesian Methods for Machine Learning CS 584: Big Data Analytics Material adapted from Radford Neal s tutorial (http://ftp.cs.utoronto.ca/pub/radford/bayes-tut.pdf), Zoubin Ghahramni (http://hunch.net/~coms-4771/zoubin_ghahramani_bayesian_learning.pdf),
Bayesian Methods for Machine Learning CS 584: Big Data Analytics Material adapted from Radford Neal s tutorial (http://ftp.cs.utoronto.ca/pub/radford/bayes-tut.pdf), Zoubin Ghahramni (http://hunch.net/~coms-4771/zoubin_ghahramani_bayesian_learning.pdf),
Master of Science in Statistics A Proposal
 1 Master of Science in Statistics A Proposal Rationale of the Program In order to cope up with the emerging complexity on the solutions of realistic problems involving several phenomena of nature it is
1 Master of Science in Statistics A Proposal Rationale of the Program In order to cope up with the emerging complexity on the solutions of realistic problems involving several phenomena of nature it is
Sequential Importance Sampling for Rare Event Estimation with Computer Experiments
 Sequential Importance Sampling for Rare Event Estimation with Computer Experiments Brian Williams and Rick Picard LA-UR-12-22467 Statistical Sciences Group, Los Alamos National Laboratory Abstract Importance
Sequential Importance Sampling for Rare Event Estimation with Computer Experiments Brian Williams and Rick Picard LA-UR-12-22467 Statistical Sciences Group, Los Alamos National Laboratory Abstract Importance
Dynamic System Identification using HDMR-Bayesian Technique
 Dynamic System Identification using HDMR-Bayesian Technique *Shereena O A 1) and Dr. B N Rao 2) 1), 2) Department of Civil Engineering, IIT Madras, Chennai 600036, Tamil Nadu, India 1) ce14d020@smail.iitm.ac.in
Dynamic System Identification using HDMR-Bayesian Technique *Shereena O A 1) and Dr. B N Rao 2) 1), 2) Department of Civil Engineering, IIT Madras, Chennai 600036, Tamil Nadu, India 1) ce14d020@smail.iitm.ac.in
Sensitivity analysis using the Metamodel of Optimal Prognosis. Lectures. Thomas Most & Johannes Will
 Lectures Sensitivity analysis using the Metamodel of Optimal Prognosis Thomas Most & Johannes Will presented at the Weimar Optimization and Stochastic Days 2011 Source: www.dynardo.de/en/library Sensitivity
Lectures Sensitivity analysis using the Metamodel of Optimal Prognosis Thomas Most & Johannes Will presented at the Weimar Optimization and Stochastic Days 2011 Source: www.dynardo.de/en/library Sensitivity
Basics of Uncertainty Analysis
 Basics of Uncertainty Analysis Chapter Six Basics of Uncertainty Analysis 6.1 Introduction As shown in Fig. 6.1, analysis models are used to predict the performances or behaviors of a product under design.
Basics of Uncertainty Analysis Chapter Six Basics of Uncertainty Analysis 6.1 Introduction As shown in Fig. 6.1, analysis models are used to predict the performances or behaviors of a product under design.
Research Collection. Basics of structural reliability and links with structural design codes FBH Herbsttagung November 22nd, 2013.
 Research Collection Presentation Basics of structural reliability and links with structural design codes FBH Herbsttagung November 22nd, 2013 Author(s): Sudret, Bruno Publication Date: 2013 Permanent Link:
Research Collection Presentation Basics of structural reliability and links with structural design codes FBH Herbsttagung November 22nd, 2013 Author(s): Sudret, Bruno Publication Date: 2013 Permanent Link:
A Probabilistic Framework for solving Inverse Problems. Lambros S. Katafygiotis, Ph.D.
 A Probabilistic Framework for solving Inverse Problems Lambros S. Katafygiotis, Ph.D. OUTLINE Introduction to basic concepts of Bayesian Statistics Inverse Problems in Civil Engineering Probabilistic Model
A Probabilistic Framework for solving Inverse Problems Lambros S. Katafygiotis, Ph.D. OUTLINE Introduction to basic concepts of Bayesian Statistics Inverse Problems in Civil Engineering Probabilistic Model
Uncertainty Quantification and Validation Using RAVEN. A. Alfonsi, C. Rabiti. Risk-Informed Safety Margin Characterization. https://lwrs.inl.
 Risk-Informed Safety Margin Characterization Uncertainty Quantification and Validation Using RAVEN https://lwrs.inl.gov A. Alfonsi, C. Rabiti North Carolina State University, Raleigh 06/28/2017 Assumptions
Risk-Informed Safety Margin Characterization Uncertainty Quantification and Validation Using RAVEN https://lwrs.inl.gov A. Alfonsi, C. Rabiti North Carolina State University, Raleigh 06/28/2017 Assumptions
Challenges In Uncertainty, Calibration, Validation and Predictability of Engineering Analysis Models
 Challenges In Uncertainty, Calibration, Validation and Predictability of Engineering Analysis Models Dr. Liping Wang GE Global Research Manager, Probabilistics Lab Niskayuna, NY 2011 UQ Workshop University
Challenges In Uncertainty, Calibration, Validation and Predictability of Engineering Analysis Models Dr. Liping Wang GE Global Research Manager, Probabilistics Lab Niskayuna, NY 2011 UQ Workshop University
Meta-models for fatigue damage estimation of offshore wind turbines jacket substructures
 Available online at www.sciencedirect.com ScienceDirect Procedia Engineering 199 (217 1158 1163 X International Conference on Structural Dynamics, EURODYN 217 Meta-models for fatigue damage estimation
Available online at www.sciencedirect.com ScienceDirect Procedia Engineering 199 (217 1158 1163 X International Conference on Structural Dynamics, EURODYN 217 Meta-models for fatigue damage estimation
BEST ESTIMATE PLUS UNCERTAINTY SAFETY STUDIES AT THE CONCEPTUAL DESIGN PHASE OF THE ASTRID DEMONSTRATOR
 BEST ESTIMATE PLUS UNCERTAINTY SAFETY STUDIES AT THE CONCEPTUAL DESIGN PHASE OF THE ASTRID DEMONSTRATOR M. Marquès CEA, DEN, DER F-13108, Saint-Paul-lez-Durance, France Advanced simulation in support to
BEST ESTIMATE PLUS UNCERTAINTY SAFETY STUDIES AT THE CONCEPTUAL DESIGN PHASE OF THE ASTRID DEMONSTRATOR M. Marquès CEA, DEN, DER F-13108, Saint-Paul-lez-Durance, France Advanced simulation in support to
Concepts and Practice of Verification, Validation, and Uncertainty Quantification
 Concepts and Practice of Verification, Validation, and Uncertainty Quantification William L. Oberkampf Sandia National Laboratories (retired) Consulting Engineer wloconsulting@gmail.com Austin, Texas Exploratory
Concepts and Practice of Verification, Validation, and Uncertainty Quantification William L. Oberkampf Sandia National Laboratories (retired) Consulting Engineer wloconsulting@gmail.com Austin, Texas Exploratory
Neutron inverse kinetics via Gaussian Processes
 Neutron inverse kinetics via Gaussian Processes P. Picca Politecnico di Torino, Torino, Italy R. Furfaro University of Arizona, Tucson, Arizona Outline Introduction Review of inverse kinetics techniques
Neutron inverse kinetics via Gaussian Processes P. Picca Politecnico di Torino, Torino, Italy R. Furfaro University of Arizona, Tucson, Arizona Outline Introduction Review of inverse kinetics techniques
Advanced analysis and modelling tools for spatial environmental data. Case study: indoor radon data in Switzerland
 EnviroInfo 2004 (Geneva) Sh@ring EnviroInfo 2004 Advanced analysis and modelling tools for spatial environmental data. Case study: indoor radon data in Switzerland Mikhail Kanevski 1, Michel Maignan 1
EnviroInfo 2004 (Geneva) Sh@ring EnviroInfo 2004 Advanced analysis and modelling tools for spatial environmental data. Case study: indoor radon data in Switzerland Mikhail Kanevski 1, Michel Maignan 1
Short tutorial on data assimilation
 Mitglied der Helmholtz-Gemeinschaft Short tutorial on data assimilation 23 June 2015 Wolfgang Kurtz & Harrie-Jan Hendricks Franssen Institute of Bio- and Geosciences IBG-3 (Agrosphere), Forschungszentrum
Mitglied der Helmholtz-Gemeinschaft Short tutorial on data assimilation 23 June 2015 Wolfgang Kurtz & Harrie-Jan Hendricks Franssen Institute of Bio- and Geosciences IBG-3 (Agrosphere), Forschungszentrum
Uncertainty Quantification of EBR-II Loss of Heat Sink Simulations with SAS4A/SASSYS-1 and DAKOTA
 1 IAEA-CN245-023 Uncertainty Quantification of EBR-II Loss of Heat Sink Simulations with SAS4A/SASSYS-1 and DAKOTA G. Zhang 1, T. Sumner 1, T. Fanning 1 1 Argonne National Laboratory, Argonne, IL, USA
1 IAEA-CN245-023 Uncertainty Quantification of EBR-II Loss of Heat Sink Simulations with SAS4A/SASSYS-1 and DAKOTA G. Zhang 1, T. Sumner 1, T. Fanning 1 1 Argonne National Laboratory, Argonne, IL, USA
Statistics Toolbox 6. Apply statistical algorithms and probability models
 Statistics Toolbox 6 Apply statistical algorithms and probability models Statistics Toolbox provides engineers, scientists, researchers, financial analysts, and statisticians with a comprehensive set of
Statistics Toolbox 6 Apply statistical algorithms and probability models Statistics Toolbox provides engineers, scientists, researchers, financial analysts, and statisticians with a comprehensive set of
Markov chain Monte Carlo methods in atmospheric remote sensing
 1 / 45 Markov chain Monte Carlo methods in atmospheric remote sensing Johanna Tamminen johanna.tamminen@fmi.fi ESA Summer School on Earth System Monitoring and Modeling July 3 Aug 11, 212, Frascati July,
1 / 45 Markov chain Monte Carlo methods in atmospheric remote sensing Johanna Tamminen johanna.tamminen@fmi.fi ESA Summer School on Earth System Monitoring and Modeling July 3 Aug 11, 212, Frascati July,
Uncertainty Quantification in Gust Loads Analysis of a Highly Flexible Aircraft Wing
 Uncertainty Quantification in Gust Loads Analysis of a Highly Flexible Aircraft Wing IFASD 2017 25 th - 28 th June 2017, Como R. G. Cook, C. Wales, A. L. Gaitonde, D. P. Jones and Jonathan Cooper University
Uncertainty Quantification in Gust Loads Analysis of a Highly Flexible Aircraft Wing IFASD 2017 25 th - 28 th June 2017, Como R. G. Cook, C. Wales, A. L. Gaitonde, D. P. Jones and Jonathan Cooper University
Dynamic Analysis in FEMAP. May 24 th, presented by Philippe Tremblay Marc Lafontaine
 Dynamic Analysis in FEMAP presented by Philippe Tremblay Marc Lafontaine marc.lafontaine@mayasim.com 514-951-3429 date May 24 th, 2016 Agenda NX Nastran Transient, frequency response, random, response
Dynamic Analysis in FEMAP presented by Philippe Tremblay Marc Lafontaine marc.lafontaine@mayasim.com 514-951-3429 date May 24 th, 2016 Agenda NX Nastran Transient, frequency response, random, response
Infer relationships among three species: Outgroup:
 Infer relationships among three species: Outgroup: Three possible trees (topologies): A C B A B C Model probability 1.0 Prior distribution Data (observations) probability 1.0 Posterior distribution Bayes
Infer relationships among three species: Outgroup: Three possible trees (topologies): A C B A B C Model probability 1.0 Prior distribution Data (observations) probability 1.0 Posterior distribution Bayes
27 : Distributed Monte Carlo Markov Chain. 1 Recap of MCMC and Naive Parallel Gibbs Sampling
 10-708: Probabilistic Graphical Models 10-708, Spring 2014 27 : Distributed Monte Carlo Markov Chain Lecturer: Eric P. Xing Scribes: Pengtao Xie, Khoa Luu In this scribe, we are going to review the Parallel
10-708: Probabilistic Graphical Models 10-708, Spring 2014 27 : Distributed Monte Carlo Markov Chain Lecturer: Eric P. Xing Scribes: Pengtao Xie, Khoa Luu In this scribe, we are going to review the Parallel
Learning in Bayesian Networks
 Learning in Bayesian Networks Florian Markowetz Max-Planck-Institute for Molecular Genetics Computational Molecular Biology Berlin Berlin: 20.06.2002 1 Overview 1. Bayesian Networks Stochastic Networks
Learning in Bayesian Networks Florian Markowetz Max-Planck-Institute for Molecular Genetics Computational Molecular Biology Berlin Berlin: 20.06.2002 1 Overview 1. Bayesian Networks Stochastic Networks
Analysing geoadditive regression data: a mixed model approach
 Analysing geoadditive regression data: a mixed model approach Institut für Statistik, Ludwig-Maximilians-Universität München Joint work with Ludwig Fahrmeir & Stefan Lang 25.11.2005 Spatio-temporal regression
Analysing geoadditive regression data: a mixed model approach Institut für Statistik, Ludwig-Maximilians-Universität München Joint work with Ludwig Fahrmeir & Stefan Lang 25.11.2005 Spatio-temporal regression
Uncertainty Quantification in Viscous Hypersonic Flows using Gradient Information and Surrogate Modeling
 Uncertainty Quantification in Viscous Hypersonic Flows using Gradient Information and Surrogate Modeling Brian A. Lockwood, Markus P. Rumpfkeil, Wataru Yamazaki and Dimitri J. Mavriplis Mechanical Engineering
Uncertainty Quantification in Viscous Hypersonic Flows using Gradient Information and Surrogate Modeling Brian A. Lockwood, Markus P. Rumpfkeil, Wataru Yamazaki and Dimitri J. Mavriplis Mechanical Engineering
Condensed Table of Contents for Introduction to Stochastic Search and Optimization: Estimation, Simulation, and Control by J. C.
 Condensed Table of Contents for Introduction to Stochastic Search and Optimization: Estimation, Simulation, and Control by J. C. Spall John Wiley and Sons, Inc., 2003 Preface... xiii 1. Stochastic Search
Condensed Table of Contents for Introduction to Stochastic Search and Optimization: Estimation, Simulation, and Control by J. C. Spall John Wiley and Sons, Inc., 2003 Preface... xiii 1. Stochastic Search
A Statistical Input Pruning Method for Artificial Neural Networks Used in Environmental Modelling
 A Statistical Input Pruning Method for Artificial Neural Networks Used in Environmental Modelling G. B. Kingston, H. R. Maier and M. F. Lambert Centre for Applied Modelling in Water Engineering, School
A Statistical Input Pruning Method for Artificial Neural Networks Used in Environmental Modelling G. B. Kingston, H. R. Maier and M. F. Lambert Centre for Applied Modelling in Water Engineering, School
Development of Stochastic Artificial Neural Networks for Hydrological Prediction
 Development of Stochastic Artificial Neural Networks for Hydrological Prediction G. B. Kingston, M. F. Lambert and H. R. Maier Centre for Applied Modelling in Water Engineering, School of Civil and Environmental
Development of Stochastic Artificial Neural Networks for Hydrological Prediction G. B. Kingston, M. F. Lambert and H. R. Maier Centre for Applied Modelling in Water Engineering, School of Civil and Environmental
Introduction to Reliability Theory (part 2)
") Introduction to Reliability Theory (part 2) Frank Coolen UTOPIAE Training School II, Durham University 3 July 2018 (UTOPIAE) Introduction to Reliability Theory 1 / 21 Outline Statistical issues Software
Introduction to Reliability Theory (part 2) Frank Coolen UTOPIAE Training School II, Durham University 3 July 2018 (UTOPIAE) Introduction to Reliability Theory 1 / 21 Outline Statistical issues Software
Automatic Differentiation Equipped Variable Elimination for Sensitivity Analysis on Probabilistic Inference Queries
 Automatic Differentiation Equipped Variable Elimination for Sensitivity Analysis on Probabilistic Inference Queries Anonymous Author(s) Affiliation Address email Abstract 1 2 3 4 5 6 7 8 9 10 11 12 Probabilistic
Automatic Differentiation Equipped Variable Elimination for Sensitivity Analysis on Probabilistic Inference Queries Anonymous Author(s) Affiliation Address email Abstract 1 2 3 4 5 6 7 8 9 10 11 12 Probabilistic
Validating Expensive Simulations with Expensive Experiments: A Bayesian Approach
 Validating Expensive Simulations with Expensive Experiments: A Bayesian Approach Dr. Arun Subramaniyan GE Global Research Center Niskayuna, NY 2012 ASME V& V Symposium Team: GE GRC: Liping Wang, Natarajan
Validating Expensive Simulations with Expensive Experiments: A Bayesian Approach Dr. Arun Subramaniyan GE Global Research Center Niskayuna, NY 2012 ASME V& V Symposium Team: GE GRC: Liping Wang, Natarajan
Process Simulation, Parameter Uncertainty, and Risk
 Process Simulation, Parameter Uncertainty, and Risk in QbD and ICH Q8 Design Space John J. Peterson GlaxoSmithKline Pharmaceuticals john.peterson@gsk.com Poor quality Better quality LSL USL Target LSL
Process Simulation, Parameter Uncertainty, and Risk in QbD and ICH Q8 Design Space John J. Peterson GlaxoSmithKline Pharmaceuticals john.peterson@gsk.com Poor quality Better quality LSL USL Target LSL
Suggestions for Making Useful the Uncertainty Quantification Results from CFD Applications
 Suggestions for Making Useful the Uncertainty Quantification Results from CFD Applications Thomas A. Zang tzandmands@wildblue.net Aug. 8, 2012 CFD Futures Conference: Zang 1 Context The focus of this presentation
Suggestions for Making Useful the Uncertainty Quantification Results from CFD Applications Thomas A. Zang tzandmands@wildblue.net Aug. 8, 2012 CFD Futures Conference: Zang 1 Context The focus of this presentation
Numerical Probabilistic Analysis under Aleatory and Epistemic Uncertainty
 Numerical Probabilistic Analysis under Aleatory and Epistemic Uncertainty Boris S. Dobronets Institute of Space and Information Technologies, Siberian Federal University, Krasnoyarsk, Russia BDobronets@sfu-kras.ru
Numerical Probabilistic Analysis under Aleatory and Epistemic Uncertainty Boris S. Dobronets Institute of Space and Information Technologies, Siberian Federal University, Krasnoyarsk, Russia BDobronets@sfu-kras.ru
Sensitivity Analysis Methods for Uncertainty Budgeting in System Design
 Sensitivity Analysis Methods for Uncertainty Budgeting in System Design Max M. J. Opgenoord and Karen E. Willcox Massachusetts Institute of Technology, Cambridge, MA, 2139 Quantification and management
Sensitivity Analysis Methods for Uncertainty Budgeting in System Design Max M. J. Opgenoord and Karen E. Willcox Massachusetts Institute of Technology, Cambridge, MA, 2139 Quantification and management
Raven Facing the Problem of assembling Multiple Models to Speed up the Uncertainty Quantification and Probabilistic Risk Assessment Analyses
 13 th International Conference on Probabilistic Safety Assessment and Management PSAM 13) Raven Facing the Problem of assembling Multiple Models to Speed up the Uncertainty Quantification and Probabilistic
13 th International Conference on Probabilistic Safety Assessment and Management PSAM 13) Raven Facing the Problem of assembling Multiple Models to Speed up the Uncertainty Quantification and Probabilistic
Bayesian Networks: Construction, Inference, Learning and Causal Interpretation. Volker Tresp Summer 2016
 Bayesian Networks: Construction, Inference, Learning and Causal Interpretation Volker Tresp Summer 2016 1 Introduction So far we were mostly concerned with supervised learning: we predicted one or several
Bayesian Networks: Construction, Inference, Learning and Causal Interpretation Volker Tresp Summer 2016 1 Introduction So far we were mostly concerned with supervised learning: we predicted one or several
arxiv: v1 [stat.co] 23 Apr 2018
![arxiv: v1 [stat.co] 23 Apr 2018](/thumbs/93/112368199.jpg "arxiv: v1 [stat.co] 23 Apr 2018") Bayesian Updating and Uncertainty Quantification using Sequential Tempered MCMC with the Rank-One Modified Metropolis Algorithm Thomas A. Catanach and James L. Beck arxiv:1804.08738v1 [stat.co] 23 Apr
Bayesian Updating and Uncertainty Quantification using Sequential Tempered MCMC with the Rank-One Modified Metropolis Algorithm Thomas A. Catanach and James L. Beck arxiv:1804.08738v1 [stat.co] 23 Apr
Lecture: Gaussian Process Regression. STAT 6474 Instructor: Hongxiao Zhu
 Lecture: Gaussian Process Regression STAT 6474 Instructor: Hongxiao Zhu Motivation Reference: Marc Deisenroth s tutorial on Robot Learning. 2 Fast Learning for Autonomous Robots with Gaussian Processes
Lecture: Gaussian Process Regression STAT 6474 Instructor: Hongxiao Zhu Motivation Reference: Marc Deisenroth s tutorial on Robot Learning. 2 Fast Learning for Autonomous Robots with Gaussian Processes
Risk Estimation and Uncertainty Quantification by Markov Chain Monte Carlo Methods
 Risk Estimation and Uncertainty Quantification by Markov Chain Monte Carlo Methods Konstantin Zuev Institute for Risk and Uncertainty University of Liverpool http://www.liv.ac.uk/risk-and-uncertainty/staff/k-zuev/
Risk Estimation and Uncertainty Quantification by Markov Chain Monte Carlo Methods Konstantin Zuev Institute for Risk and Uncertainty University of Liverpool http://www.liv.ac.uk/risk-and-uncertainty/staff/k-zuev/
CPSC 540: Machine Learning
 CPSC 540: Machine Learning MCMC and Non-Parametric Bayes Mark Schmidt University of British Columbia Winter 2016 Admin I went through project proposals: Some of you got a message on Piazza. No news is
CPSC 540: Machine Learning MCMC and Non-Parametric Bayes Mark Schmidt University of British Columbia Winter 2016 Admin I went through project proposals: Some of you got a message on Piazza. No news is
Coastal Hazards System: Interpretation and Application
 Lessons Learned and Best Practices: Resilience of Coastal Infrastructure Hato Rey, PR March 8-9, 2017 Coastal Hazards System: Interpretation and Application Victor M. Gonzalez, P.E. Team: PI: Jeffrey A.
Lessons Learned and Best Practices: Resilience of Coastal Infrastructure Hato Rey, PR March 8-9, 2017 Coastal Hazards System: Interpretation and Application Victor M. Gonzalez, P.E. Team: PI: Jeffrey A.
Bayesian Inference on Joint Mixture Models for Survival-Longitudinal Data with Multiple Features. Yangxin Huang
 Bayesian Inference on Joint Mixture Models for Survival-Longitudinal Data with Multiple Features Yangxin Huang Department of Epidemiology and Biostatistics, COPH, USF, Tampa, FL yhuang@health.usf.edu January
Bayesian Inference on Joint Mixture Models for Survival-Longitudinal Data with Multiple Features Yangxin Huang Department of Epidemiology and Biostatistics, COPH, USF, Tampa, FL yhuang@health.usf.edu January
Polynomial chaos expansions for sensitivity analysis
 c DEPARTMENT OF CIVIL, ENVIRONMENTAL AND GEOMATIC ENGINEERING CHAIR OF RISK, SAFETY & UNCERTAINTY QUANTIFICATION Polynomial chaos expansions for sensitivity analysis B. Sudret Chair of Risk, Safety & Uncertainty
c DEPARTMENT OF CIVIL, ENVIRONMENTAL AND GEOMATIC ENGINEERING CHAIR OF RISK, SAFETY & UNCERTAINTY QUANTIFICATION Polynomial chaos expansions for sensitivity analysis B. Sudret Chair of Risk, Safety & Uncertainty
Recent Advances in Bayesian Inference Techniques
 Recent Advances in Bayesian Inference Techniques Christopher M. Bishop Microsoft Research, Cambridge, U.K. research.microsoft.com/~cmbishop SIAM Conference on Data Mining, April 2004 Abstract Bayesian
Recent Advances in Bayesian Inference Techniques Christopher M. Bishop Microsoft Research, Cambridge, U.K. research.microsoft.com/~cmbishop SIAM Conference on Data Mining, April 2004 Abstract Bayesian
Methods for including uncertainty in seismic PSA L Raganelli K Ardron
 Methods for including uncertainty in seismic PSA L Raganelli K Ardron Background Earthquakes random events with uncertainty in intensity We want to study their effect on NPP safety and other risk significant
Methods for including uncertainty in seismic PSA L Raganelli K Ardron Background Earthquakes random events with uncertainty in intensity We want to study their effect on NPP safety and other risk significant
Gaussian Processes for Computer Experiments
 Gaussian Processes for Computer Experiments Jeremy Oakley School of Mathematics and Statistics, University of Sheffield www.jeremy-oakley.staff.shef.ac.uk 1 / 43 Computer models Computer model represented
Gaussian Processes for Computer Experiments Jeremy Oakley School of Mathematics and Statistics, University of Sheffield www.jeremy-oakley.staff.shef.ac.uk 1 / 43 Computer models Computer model represented
Predictive Engineering and Computational Sciences. Local Sensitivity Derivative Enhanced Monte Carlo Methods. Roy H. Stogner, Vikram Garg
 PECOS Predictive Engineering and Computational Sciences Local Sensitivity Derivative Enhanced Monte Carlo Methods Roy H. Stogner, Vikram Garg Institute for Computational Engineering and Sciences The University
PECOS Predictive Engineering and Computational Sciences Local Sensitivity Derivative Enhanced Monte Carlo Methods Roy H. Stogner, Vikram Garg Institute for Computational Engineering and Sciences The University
Uncertainty modelling using software FReET
 Uncertainty modelling using software FReET D. Novak, M. Vorechovsky, R. Rusina Brno University of Technology Brno, Czech Republic 1/30 Outline Introduction Methods and main features Software FReET Selected
Uncertainty modelling using software FReET D. Novak, M. Vorechovsky, R. Rusina Brno University of Technology Brno, Czech Republic 1/30 Outline Introduction Methods and main features Software FReET Selected
SURROGATE PREPOSTERIOR ANALYSES FOR PREDICTING AND ENHANCING IDENTIFIABILITY IN MODEL CALIBRATION
 International Journal for Uncertainty Quantification, ():xxx xxx, 0 SURROGATE PREPOSTERIOR ANALYSES FOR PREDICTING AND ENHANCING IDENTIFIABILITY IN MODEL CALIBRATION Zhen Jiang, Daniel W. Apley, & Wei
International Journal for Uncertainty Quantification, ():xxx xxx, 0 SURROGATE PREPOSTERIOR ANALYSES FOR PREDICTING AND ENHANCING IDENTIFIABILITY IN MODEL CALIBRATION Zhen Jiang, Daniel W. Apley, & Wei
Unmanned Aircraft System Well Clear
 Unmanned Aircraft System Well Clear Dr. Roland Weibel 18 November 2014 Sponsors: Neal Suchy, FAA TCAS Program Manager, Surveillance Services, AJM-233 Jim Williams, FAA Unmanned Aircraft Systems Integration
Unmanned Aircraft System Well Clear Dr. Roland Weibel 18 November 2014 Sponsors: Neal Suchy, FAA TCAS Program Manager, Surveillance Services, AJM-233 Jim Williams, FAA Unmanned Aircraft Systems Integration
Parameter Selection and Covariance Updating
 Parameter Selection and Covariance Updating Tiago AN Silva Nuno MM Maia Michael Lin 3 and John E Mottershead 45 Instituto Superior de Engenharia de Lisboa Lisbon Portugal LAETA IDMEC Instituto Superior
Parameter Selection and Covariance Updating Tiago AN Silva Nuno MM Maia Michael Lin 3 and John E Mottershead 45 Instituto Superior de Engenharia de Lisboa Lisbon Portugal LAETA IDMEC Instituto Superior
Advanced Weather Technology
 Advanced Weather Technology Tuesday, October 16, 2018, 1:00 PM 2:00 PM PRESENTED BY: Gary Pokodner, FAA WTIC Program Manager Agenda Overview Augmented reality mobile application Crowd Sourcing Visibility
Advanced Weather Technology Tuesday, October 16, 2018, 1:00 PM 2:00 PM PRESENTED BY: Gary Pokodner, FAA WTIC Program Manager Agenda Overview Augmented reality mobile application Crowd Sourcing Visibility
Winter 2019 Math 106 Topics in Applied Mathematics. Lecture 1: Introduction
 Winter 2019 Math 106 Topics in Applied Mathematics Data-driven Uncertainty Quantification Yoonsang Lee (yoonsang.lee@dartmouth.edu) Lecture 1: Introduction 19 Winter M106 Class: MWF 12:50-1:55 pm @ 200
Winter 2019 Math 106 Topics in Applied Mathematics Data-driven Uncertainty Quantification Yoonsang Lee (yoonsang.lee@dartmouth.edu) Lecture 1: Introduction 19 Winter M106 Class: MWF 12:50-1:55 pm @ 200
Statistical Rock Physics
 Statistical - Introduction Book review 3.1-3.3 Min Sun March. 13, 2009 Outline. What is Statistical. Why we need Statistical. How Statistical works Statistical Rock physics Information theory Statistics
Statistical - Introduction Book review 3.1-3.3 Min Sun March. 13, 2009 Outline. What is Statistical. Why we need Statistical. How Statistical works Statistical Rock physics Information theory Statistics
Related Concepts: Lecture 9 SEM, Statistical Modeling, AI, and Data Mining. I. Terminology of SEM
 Lecture 9 SEM, Statistical Modeling, AI, and Data Mining I. Terminology of SEM Related Concepts: Causal Modeling Path Analysis Structural Equation Modeling Latent variables (Factors measurable, but thru
Lecture 9 SEM, Statistical Modeling, AI, and Data Mining I. Terminology of SEM Related Concepts: Causal Modeling Path Analysis Structural Equation Modeling Latent variables (Factors measurable, but thru
Repetitive control mechanism of disturbance rejection using basis function feedback with fuzzy regression approach
 Repetitive control mechanism of disturbance rejection using basis function feedback with fuzzy regression approach *Jeng-Wen Lin 1), Chih-Wei Huang 2) and Pu Fun Shen 3) 1) Department of Civil Engineering,
Repetitive control mechanism of disturbance rejection using basis function feedback with fuzzy regression approach *Jeng-Wen Lin 1), Chih-Wei Huang 2) and Pu Fun Shen 3) 1) Department of Civil Engineering,
Machine Learning Lecture 2
 Machine Perceptual Learning and Sensory Summer Augmented 15 Computing Many slides adapted from B. Schiele Machine Learning Lecture 2 Probability Density Estimation 16.04.2015 Bastian Leibe RWTH Aachen
Machine Perceptual Learning and Sensory Summer Augmented 15 Computing Many slides adapted from B. Schiele Machine Learning Lecture 2 Probability Density Estimation 16.04.2015 Bastian Leibe RWTH Aachen
Sensitivity Analysis of a Nuclear Reactor System Finite Element Model
 Westinghouse Non-Proprietary Class 3 Sensitivity Analysis of a Nuclear Reactor System Finite Element Model 2018 ASME Verification & Validation Symposium VVS2018-9306 Gregory A. Banyay, P.E. Stephen D.
Westinghouse Non-Proprietary Class 3 Sensitivity Analysis of a Nuclear Reactor System Finite Element Model 2018 ASME Verification & Validation Symposium VVS2018-9306 Gregory A. Banyay, P.E. Stephen D.
Performance Evaluation of the Matlab PCT for Parallel Implementations of Nonnegative Tensor Factorization
 Performance Evaluation of the Matlab PCT for Parallel Implementations of Nonnegative Tensor Factorization Tabitha Samuel, Master s Candidate Dr. Michael W. Berry, Major Professor Abstract: Increasingly
Performance Evaluation of the Matlab PCT for Parallel Implementations of Nonnegative Tensor Factorization Tabitha Samuel, Master s Candidate Dr. Michael W. Berry, Major Professor Abstract: Increasingly
Machine Learning using Bayesian Approaches
 Machine Learning using Bayesian Approaches Sargur N. Srihari University at Buffalo, State University of New York 1 Outline 1. Progress in ML and PR 2. Fully Bayesian Approach 1. Probability theory Bayes
Machine Learning using Bayesian Approaches Sargur N. Srihari University at Buffalo, State University of New York 1 Outline 1. Progress in ML and PR 2. Fully Bayesian Approach 1. Probability theory Bayes
In-Flight Engine Diagnostics and Prognostics Using A Stochastic-Neuro-Fuzzy Inference System
 In-Flight Engine Diagnostics and Prognostics Using A Stochastic-Neuro-Fuzzy Inference System Dan M. Ghiocel & Joshua Altmann STI Technologies, Rochester, New York, USA Keywords: reliability, stochastic
In-Flight Engine Diagnostics and Prognostics Using A Stochastic-Neuro-Fuzzy Inference System Dan M. Ghiocel & Joshua Altmann STI Technologies, Rochester, New York, USA Keywords: reliability, stochastic
Non-Parametric Bayes
 Non-Parametric Bayes Mark Schmidt UBC Machine Learning Reading Group January 2016 Current Hot Topics in Machine Learning Bayesian learning includes: Gaussian processes. Approximate inference. Bayesian
Non-Parametric Bayes Mark Schmidt UBC Machine Learning Reading Group January 2016 Current Hot Topics in Machine Learning Bayesian learning includes: Gaussian processes. Approximate inference. Bayesian
Machine Learning Lecture 2
 Machine Perceptual Learning and Sensory Summer Augmented 6 Computing Announcements Machine Learning Lecture 2 Course webpage http://www.vision.rwth-aachen.de/teaching/ Slides will be made available on
Machine Perceptual Learning and Sensory Summer Augmented 6 Computing Announcements Machine Learning Lecture 2 Course webpage http://www.vision.rwth-aachen.de/teaching/ Slides will be made available on
Review of the role of uncertainties in room acoustics
 Review of the role of uncertainties in room acoustics Ralph T. Muehleisen, Ph.D. PE, FASA, INCE Board Certified Principal Building Scientist and BEDTR Technical Lead Division of Decision and Information
Review of the role of uncertainties in room acoustics Ralph T. Muehleisen, Ph.D. PE, FASA, INCE Board Certified Principal Building Scientist and BEDTR Technical Lead Division of Decision and Information
Predici 11 Quick Overview
 Predici 11 Quick Overview PREDICI is the leading simulation package for kinetic, process and property modeling with a major emphasis on macromolecular systems. It has been successfully utilized to model
Predici 11 Quick Overview PREDICI is the leading simulation package for kinetic, process and property modeling with a major emphasis on macromolecular systems. It has been successfully utilized to model
Safety Envelope for Load Tolerance and Its Application to Fatigue Reliability Design
 Safety Envelope for Load Tolerance and Its Application to Fatigue Reliability Design Haoyu Wang * and Nam H. Kim University of Florida, Gainesville, FL 32611 Yoon-Jun Kim Caterpillar Inc., Peoria, IL 61656
Safety Envelope for Load Tolerance and Its Application to Fatigue Reliability Design Haoyu Wang * and Nam H. Kim University of Florida, Gainesville, FL 32611 Yoon-Jun Kim Caterpillar Inc., Peoria, IL 61656
Disease mapping with Gaussian processes
 EUROHEIS2 Kuopio, Finland 17-18 August 2010 Aki Vehtari (former Helsinki University of Technology) Department of Biomedical Engineering and Computational Science (BECS) Acknowledgments Researchers - Jarno
EUROHEIS2 Kuopio, Finland 17-18 August 2010 Aki Vehtari (former Helsinki University of Technology) Department of Biomedical Engineering and Computational Science (BECS) Acknowledgments Researchers - Jarno
2D Image Processing (Extended) Kalman and particle filter
 Kalman and particle filter") 2D Image Processing (Extended) Kalman and particle filter Prof. Didier Stricker Dr. Gabriele Bleser Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz
2D Image Processing (Extended) Kalman and particle filter Prof. Didier Stricker Dr. Gabriele Bleser Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz
Machine Learning Overview
 Machine Learning Overview Sargur N. Srihari University at Buffalo, State University of New York USA 1 Outline 1. What is Machine Learning (ML)? 2. Types of Information Processing Problems Solved 1. Regression
Machine Learning Overview Sargur N. Srihari University at Buffalo, State University of New York USA 1 Outline 1. What is Machine Learning (ML)? 2. Types of Information Processing Problems Solved 1. Regression
Contents. Part I: Fundamentals of Bayesian Inference 1
 Contents Preface xiii Part I: Fundamentals of Bayesian Inference 1 1 Probability and inference 3 1.1 The three steps of Bayesian data analysis 3 1.2 General notation for statistical inference 4 1.3 Bayesian
Contents Preface xiii Part I: Fundamentals of Bayesian Inference 1 1 Probability and inference 3 1.1 The three steps of Bayesian data analysis 3 1.2 General notation for statistical inference 4 1.3 Bayesian
Should all Machine Learning be Bayesian? Should all Bayesian models be non-parametric?
 Should all Machine Learning be Bayesian? Should all Bayesian models be non-parametric? Zoubin Ghahramani Department of Engineering University of Cambridge, UK zoubin@eng.cam.ac.uk http://learning.eng.cam.ac.uk/zoubin/
Should all Machine Learning be Bayesian? Should all Bayesian models be non-parametric? Zoubin Ghahramani Department of Engineering University of Cambridge, UK zoubin@eng.cam.ac.uk http://learning.eng.cam.ac.uk/zoubin/
Prerequisite: STATS 7 or STATS 8 or AP90 or (STATS 120A and STATS 120B and STATS 120C). AP90 with a minimum score of 3
. AP90 with a minimum score of 3") University of California, Irvine 2017-2018 1 Statistics (STATS) Courses STATS 5. Seminar in Data Science. 1 Unit. An introduction to the field of Data Science; intended for entering freshman and transfers.
University of California, Irvine 2017-2018 1 Statistics (STATS) Courses STATS 5. Seminar in Data Science. 1 Unit. An introduction to the field of Data Science; intended for entering freshman and transfers.
A Verified Realization of a Dempster-Shafer-Based Fault Tree Analysis
 A Verified Realization of a Dempster-Shafer-Based Fault Tree Analysis Ekaterina Auer, Wolfram Luther, Gabor Rebner Department of Computer and Cognitive Sciences (INKO) University of Duisburg-Essen Duisburg,
A Verified Realization of a Dempster-Shafer-Based Fault Tree Analysis Ekaterina Auer, Wolfram Luther, Gabor Rebner Department of Computer and Cognitive Sciences (INKO) University of Duisburg-Essen Duisburg,
Source Data Applicability Impacts On Epistemic Uncertainty For Launch Vehicle Fault Tree Models
 Source Data Applicability Impacts On Epistemic Uncertainty For Launch Vehicle Fault Tree Models Society Of Reliability Engineers Huntsville Chapter Redstone Arsenal May 11, 2016 Mohammad AL Hassan, Steven
Source Data Applicability Impacts On Epistemic Uncertainty For Launch Vehicle Fault Tree Models Society Of Reliability Engineers Huntsville Chapter Redstone Arsenal May 11, 2016 Mohammad AL Hassan, Steven
EE562 ARTIFICIAL INTELLIGENCE FOR ENGINEERS
 EE562 ARTIFICIAL INTELLIGENCE FOR ENGINEERS Lecture 16, 6/1/2005 University of Washington, Department of Electrical Engineering Spring 2005 Instructor: Professor Jeff A. Bilmes Uncertainty & Bayesian Networks
EE562 ARTIFICIAL INTELLIGENCE FOR ENGINEERS Lecture 16, 6/1/2005 University of Washington, Department of Electrical Engineering Spring 2005 Instructor: Professor Jeff A. Bilmes Uncertainty & Bayesian Networks
EFFICIENT SHAPE OPTIMIZATION USING POLYNOMIAL CHAOS EXPANSION AND LOCAL SENSITIVITIES
 9 th ASCE Specialty Conference on Probabilistic Mechanics and Structural Reliability EFFICIENT SHAPE OPTIMIZATION USING POLYNOMIAL CHAOS EXPANSION AND LOCAL SENSITIVITIES Nam H. Kim and Haoyu Wang University
9 th ASCE Specialty Conference on Probabilistic Mechanics and Structural Reliability EFFICIENT SHAPE OPTIMIZATION USING POLYNOMIAL CHAOS EXPANSION AND LOCAL SENSITIVITIES Nam H. Kim and Haoyu Wang University
Session: Probabilistic methods in avalanche hazard assessment. Session moderator: Marco Uzielli Norwegian Geotechnical Institute
 Session: Probabilistic methods in avalanche hazard assessment Session moderator: Marco Uzielli Norwegian Geotechnical Institute Session plan Title Presenter Affiliation A probabilistic framework for avalanche
Session: Probabilistic methods in avalanche hazard assessment Session moderator: Marco Uzielli Norwegian Geotechnical Institute Session plan Title Presenter Affiliation A probabilistic framework for avalanche
Uncertainty modeling for robust verifiable design. Arnold Neumaier University of Vienna Vienna, Austria
 Uncertainty modeling for robust verifiable design Arnold Neumaier University of Vienna Vienna, Austria Safety Safety studies in structural engineering are supposed to guard against failure in all reasonable
Uncertainty modeling for robust verifiable design Arnold Neumaier University of Vienna Vienna, Austria Safety Safety studies in structural engineering are supposed to guard against failure in all reasonable
Fuzzy reliability analysis of washing unit in a paper plant using soft-computing based hybridized techniques
 Fuzzy reliability analysis of washing unit in a paper plant using soft-computing based hybridized techniques *Department of Mathematics University of Petroleum & Energy Studies (UPES) Dehradun-248007,
Fuzzy reliability analysis of washing unit in a paper plant using soft-computing based hybridized techniques *Department of Mathematics University of Petroleum & Energy Studies (UPES) Dehradun-248007,
Modelling geoadditive survival data
 Modelling geoadditive survival data Thomas Kneib & Ludwig Fahrmeir Department of Statistics, Ludwig-Maximilians-University Munich 1. Leukemia survival data 2. Structured hazard regression 3. Mixed model
Modelling geoadditive survival data Thomas Kneib & Ludwig Fahrmeir Department of Statistics, Ludwig-Maximilians-University Munich 1. Leukemia survival data 2. Structured hazard regression 3. Mixed model
Integrated Non-Factorized Variational Inference
 Integrated Non-Factorized Variational Inference Shaobo Han, Xuejun Liao and Lawrence Carin Duke University February 27, 2014 S. Han et al. Integrated Non-Factorized Variational Inference February 27, 2014
Integrated Non-Factorized Variational Inference Shaobo Han, Xuejun Liao and Lawrence Carin Duke University February 27, 2014 S. Han et al. Integrated Non-Factorized Variational Inference February 27, 2014
Finite Element Model Updating Using the Separable Shadow Hybrid Monte Carlo Technique
 Finite Element Model Updating Using the Separable Shadow Hybrid Monte Carlo Technique I. Boulkaibet a, L. Mthembu a, T. Marwala a, M. I. Friswell b, S. Adhikari b a The Centre For Intelligent System Modelling
Finite Element Model Updating Using the Separable Shadow Hybrid Monte Carlo Technique I. Boulkaibet a, L. Mthembu a, T. Marwala a, M. I. Friswell b, S. Adhikari b a The Centre For Intelligent System Modelling
An Introduction to Reversible Jump MCMC for Bayesian Networks, with Application
 An Introduction to Reversible Jump MCMC for Bayesian Networks, with Application, CleverSet, Inc. STARMAP/DAMARS Conference Page 1 The research described in this presentation has been funded by the U.S.
An Introduction to Reversible Jump MCMC for Bayesian Networks, with Application, CleverSet, Inc. STARMAP/DAMARS Conference Page 1 The research described in this presentation has been funded by the U.S.
Self Adaptive Particle Filter
 Self Adaptive Particle Filter Alvaro Soto Pontificia Universidad Catolica de Chile Department of Computer Science Vicuna Mackenna 4860 (143), Santiago 22, Chile asoto@ing.puc.cl Abstract The particle filter
Self Adaptive Particle Filter Alvaro Soto Pontificia Universidad Catolica de Chile Department of Computer Science Vicuna Mackenna 4860 (143), Santiago 22, Chile asoto@ing.puc.cl Abstract The particle filter
Probabilistic Graphical Models Lecture 17: Markov chain Monte Carlo
 Probabilistic Graphical Models Lecture 17: Markov chain Monte Carlo Andrew Gordon Wilson www.cs.cmu.edu/~andrewgw Carnegie Mellon University March 18, 2015 1 / 45 Resources and Attribution Image credits,
Probabilistic Graphical Models Lecture 17: Markov chain Monte Carlo Andrew Gordon Wilson www.cs.cmu.edu/~andrewgw Carnegie Mellon University March 18, 2015 1 / 45 Resources and Attribution Image credits,
New Advances in Uncertainty Analysis and Estimation
 New Advances in Uncertainty Analysis and Estimation Overview: Both sensor observation data and mathematical models are used to assist in the understanding of physical dynamic systems. However, observational
New Advances in Uncertainty Analysis and Estimation Overview: Both sensor observation data and mathematical models are used to assist in the understanding of physical dynamic systems. However, observational
MultiscaleMaterialsDesignUsingInformatics. S. R. Kalidindi, A. Agrawal, A. Choudhary, V. Sundararaghavan AFOSR-FA
 MultiscaleMaterialsDesignUsingInformatics S. R. Kalidindi, A. Agrawal, A. Choudhary, V. Sundararaghavan AFOSR-FA9550-12-1-0458 1 Hierarchical Material Structure Kalidindi and DeGraef, ARMS, 2015 Main Challenges
MultiscaleMaterialsDesignUsingInformatics S. R. Kalidindi, A. Agrawal, A. Choudhary, V. Sundararaghavan AFOSR-FA9550-12-1-0458 1 Hierarchical Material Structure Kalidindi and DeGraef, ARMS, 2015 Main Challenges
Uncertainty propagation in a sequential model for flood forecasting
 Predictions in Ungauged Basins: Promise and Progress (Proceedings of symposium S7 held during the Seventh IAHS Scientific Assembly at Foz do Iguaçu, Brazil, April 2005). IAHS Publ. 303, 2006. 177 Uncertainty
Predictions in Ungauged Basins: Promise and Progress (Proceedings of symposium S7 held during the Seventh IAHS Scientific Assembly at Foz do Iguaçu, Brazil, April 2005). IAHS Publ. 303, 2006. 177 Uncertainty
ARTIFICIAL NEURAL NETWORK WITH HYBRID TAGUCHI-GENETIC ALGORITHM FOR NONLINEAR MIMO MODEL OF MACHINING PROCESSES
 International Journal of Innovative Computing, Information and Control ICIC International c 2013 ISSN 1349-4198 Volume 9, Number 4, April 2013 pp. 1455 1475 ARTIFICIAL NEURAL NETWORK WITH HYBRID TAGUCHI-GENETIC
International Journal of Innovative Computing, Information and Control ICIC International c 2013 ISSN 1349-4198 Volume 9, Number 4, April 2013 pp. 1455 1475 ARTIFICIAL NEURAL NETWORK WITH HYBRID TAGUCHI-GENETIC
Model-Based Reinforcement Learning with Continuous States and Actions
 Marc P. Deisenroth, Carl E. Rasmussen, and Jan Peters: Model-Based Reinforcement Learning with Continuous States and Actions in Proceedings of the 16th European Symposium on Artificial Neural Networks
Marc P. Deisenroth, Carl E. Rasmussen, and Jan Peters: Model-Based Reinforcement Learning with Continuous States and Actions in Proceedings of the 16th European Symposium on Artificial Neural Networks
An introduction to Bayesian statistics and model calibration and a host of related topics
 An introduction to Bayesian statistics and model calibration and a host of related topics Derek Bingham Statistics and Actuarial Science Simon Fraser University Cast of thousands have participated in the
An introduction to Bayesian statistics and model calibration and a host of related topics Derek Bingham Statistics and Actuarial Science Simon Fraser University Cast of thousands have participated in the