Weak Convergence of Numerical Methods for Dynamical Systems and Optimal Control, and a relation with Large Deviations for Stochastic Equations
|
|
|
- Nicholas Rich
- 5 years ago
- Views:
Transcription
1 Weak Convergence of Numerical Methods for Dynamical Systems and, and a relation with Large Deviations for Stochastic Equations Mattias Sandberg KTH CSC
2 Outline The error representation for weak convergence, with convergence result Large Deviations Example: Phase Transitions
3 Approximation of an evolution equation Want to approximate g ( x(t ) ) where x : [0, T ] X solves an equation x (t) = f ( x(t) ), x(t 0 ) = x 0, (1) with a solution to x (t) = f ( x(t) ), x(t 0 ) = x 0. (2)
4 Approximation of an evolution equation Want to approximate g ( x(t ) ) where x : [0, T ] X solves an equation x (t) = f ( x(t) ), x(t 0 ) = x 0, (1) with a solution to x (t) = f ( x(t) ), x(t 0 ) = x 0. (2) How do we compute the error g ( x(t ) ) g ( x(t ) )?
5 One way: (x x) = f (x) f ( x) = f (x) f (x) + f (x) f ( x), and Grönwall s Lemma.
6 One way: (x x) = f (x) f ( x) = f (x) f (x) + f (x) f ( x), and Grönwall s Lemma. Gives (too pessimistic) a priori bound.
7 An error representation Introduce the value functions u(x 0, t 0 ) := g ( x(t ) ), x solves (1), ũ(x 0, t 0 ) := g ( x(t ) ), x solves (2), By definition, u is constant along the solution path, i.e. 0 = d dt u(x(t), t) = u t + u x x = u t + u x f. Hence for every (x, t) we have u t (x, t) + u x (x, t) f (x) = 0.
8 An error representation g( x(t )) g(x(t )) = u( x(t ), T ) u(x 0, t 0 ) = = = T t 0 T t 0 T d u( x(t), t)dt dt ( ut ( x(t), t) + u x ( x(t), t) f ( x(t)) ) dt ( ut ( x(t), t) + u x ( x(t), t) f ( x(t)) ) dt t 0 }{{} =0 T + u x ( x(t), t) ( f ( x(t)) f ( x(t)))dt t 0
9 From Solving Ordinary Differential Equations by Hairer, Nørsett, and Wanner.
10 The function f could be an approximation of f or a numerical method: x n+1 = x n + t f ( x n ). Then g( x(t )) g(x(t )) = t n+1 u x ( x(t), t) ( f ( x n ) f ( x(t)))dt It is an error representation of the form weight n residual n, n which makes it possible to develop adaptive methods. t n
11 Examples of usage Adaptive ODE: A varitational principle for adaptive approximation of ordinary differential equations, K.-S. Moon, R. Tempone, A. Szepessy, G. Zouraris, Numerische Mathematik, (2003). Convergence rates for adaptive approximation of ordinary differential equations, K.-S. Moon, R. Tempone, A. Szepessy, G. Zouraris, Numerische Mathematik, (2003). Adaptive SDE: Adaptive weak approximation of stochastic differntial equations, A. Szepessy, R. Tempone G. Zouraris, Comm. Pure Appl. Math, (2001)
12 The optimal control problem Minimize when X solves T 0 h ( X (s), α(s) ) ds + g ( X (T ) ) X (s) = f ( X (s), α(s) ), X (0) = x 0. 0 < s < T and X (s) R d, α(s) B.
13 Value function ( T u(x, t) = inf h(x (s), α(s))ds + g(x (T )) ) α Xt =x t Hamilton-Jacobi equation: u t + H(u x, x) = 0, u(x, T ) = g(x), (3) where H(λ, x) = min a ( λ f (x, a) + h(x, a) ) (See e.g. L. Evans Partial Differential Equations.)
14 Optimal controls are characteristics Theorem Assume H C 1,1 loc (Rd R d ), f, g, h smooth etc., and (α, X ) optimal control and state variables for the starting position (x, t) R d [0, T ]. Then dual path λ : [t, T ] R d : X (s) = H λ ( λ(s), X (s) ), λ (s) = H x ( λ(s), X (s) ), λ(t ) = g ( X (T ) ). (See e.g. P. Cannarsa, C. Sinestrari, Semiconcave Functions, Hamilton-Jacobi Equations, and. ) This is the Pontryagin principle for the case when the Hamiltonian is differentiable.
15 Hamilton-Jacobi vs. Pontryagin Hamilton-Jacobi Pontryagin Global min + - High dimension - + Idea: Use Pontryagin for numerical methods, and Hamilton-Jacobi for theoretical evaluation.
16 Why use our error representation?
17 Why use our error representation? Given continuous solution {X, λ}, is there a discrete solution {X n, λ n } N n=0 to s.t. (X n+1, λ n+1 ) = A t (X n, λ n ), X 0 = x 0, λ N = g (X N ). { sup λn λ(n t) + X n X (n t) } = O( t r ), n where r is the order of A t? In particular, this would imply λ 0 λ(0) small. Consider the continuous solution with initial position (x 0, λ(0) = λ 0 ), and vary λ(0) (linearization).
18 Linearization of ODE Let X and X = X + εv solve In the limit X = f (X ), X (0) = x 0, X = X + εv = f ( X ) f (X ) + εf (X )v, v(0) = v 0. v = f (X )v, v(0) = v 0. Hence the mapping x 0 X (T ) is space-filling. Apply this to the Hamiltonian system.
19 Linearization of Hamiltonian system X = X + εv x, λ = λ + εv λ. Then v x = H λx (X, λ)v x + H λλ (X, λ)v λ, v x (0) = v0 x = 0, v λ = H xx (X, λ)v x + H xλ (X, λ)v λ, v λ (0) = v0 λ. Hence v λ (T ) may be zero for any initial condition v0 λ.
20 Variational representation of Hamilton-Jacobi If u : R d [0, T ] R viscosity solution of Hamilton-Jacobi equation (3): u(x, t) = inf α { T L(α, X )dt + g ( X (T ) ) X (t) = α(t), X (t) = x }, t where { } { } L(x, α) = sup α λ+h(λ, x), and H(λ, x) = inf λ α+l(x, α). λ α (Legendre-type transform)
21 Representation as discrete minimization Symplectic Euler, type I: corresponds to minimization of X n+1 = X n + th λ (X n, λ n+1 ), λ n = λ n+1 + th x (X n, λ n+1 ), t N 1 n=0 where X n+1 = X n + tα n. L(X n, α n ) + g(x N ),
22 Representation as discrete minimization Symplectic Euler, type II: corresponds to minimization of X n+1 = X n + th λ (X n+1, λ n ), λ n = λ n+1 + th x (X n+1, λ n ), t N 1 n=0 L(X n+1, α n ) + g(x N ).
23 A problem: Nondifferentiable Hamiltonian f = α { 1, 1}, inf 1 0 X 2 dt H(λ, x) = min a ( λ f (x, a) + h(x, a) ) = λ + x 2 T t x
24 Symplectic Euler(I or II) + Regularized Hamiltonian = Symplectic Pontryagin(I or II). With h δ (λ, x) = H δ (λ, x) λ Hλ δ (λ, x). we can define an approximate value function ( ū(x, t n ) = min g(xn ) + h δ (λ m+1, X m ) t ), X n=x m n ( ū(x, t n ) = min g(xn ) + h δ (λ m, X m+1 ) t ), X n=x m n (SP(I)), (SP(II)).
25 Convergence of Symplectic Pontryagin (I and II) Theorem Assume that the Hamiltonian satisfies H(λ 1, x) H(λ 2, x) C λ 1 λ 2, H(λ, x 1 ) H(λ, x 2 ) C x 1 x 2 (1 + λ ), H(, x) is concave. Assume that the terminal cost g is continuously differentiable, and g(x) k(1 + x ). Both for Symplectic Pontryagin I and II there exists a solution { X n, λ n } with associated value ū, such that u ū = O(δ + t). (S. Szepessy, M2AN (2006), S. arxiv (2010))
26 Proof 1. Let u δ solve Then u u δ = O(δ). 2. Use that u δ (x, t) = inf α u δ t + H δ (u δ x, x) = 0, u δ (x, T ) = g(x). { T L(α, X )dt+g ( X (T ) ) X (t) = α(t), X (t) = x }, t where { L(x, α) = sup α λ+h δ (λ, x) }, and H δ { } (λ, x) = inf λ α+l(x, α) λ α (Legendre-type transform)
27 Proof 3. Lower bound for ū(x s, 0) u δ (x s, 0). Extend minimizer {X n } to a piecewise linear function X (t). ū(x s, 0) u δ (x s, 0) = t = t = t = N 1 n=0 N 1 n=0 N 1 tn+1 n=0 N 1 n=0 L(X n, α n ) + g(x N ) u δ (x s, 0) L(X n, α n ) + u δ ( X (T ), T ) u δ ( X (0), 0) T L(X n, α n ) + 0 d dt uδ ( X (t), t)dt t n ( u δ t ( X (t), t) + u δ x( X (t), t) α n + L( X (t), α n ) + L(X n, α n ) L( X (t), α n ) ) dt
28 Proof Now use H δ (x, λ) = min α R d { λ α + L(x, α) }, and the fact that u δ solves a Hamilton-Jacobi equation. Thus ū(x s, 0) u δ (x s, 0) N 1 n=0 The following relation holds: tn+1 t n ( L(Xn, α n ) L( X (t), α n ) ) dt. L(X n, α n ) = α n λ n+1 + H δ (X n, λ n+1 ). By the Symplectic Pontryagin relation we have λ n K. Let H δ (x, λ) = H δ (x, λ) ( max( λ K, 0) ) 2. { L(x, α) = sup α λ + H δ (x, λ) } λ R d
29 Proof Then L(X n, α n ) = L(X n, α n ). Suppose that L( X (t), α n ) = α n λ + H δ ( X (t), λ ). Then L(X n, α n ) L( X (t), α n ) = max λ ( αn λ + H δ (X n, λ) ) max λ ( αn λ + H δ ( X (t), λ) ) H δ (X n, λ ) H δ ( X (t), λ ) = H δ (X n, λ ) H δ ( X (t), λ ) K X (t) X n K t.
30 Proof 4. Lower bound for u δ (x s, 0) ū(x s, 0). By H δ (x 1, λ) H(x 2, λ) C x 1 x 2 (1 + λ ) (4) the following result holds: Lemma Assume that the Hamiltonian H satisfies equation (4) and is concave in its second argument. Let x 1, x 2, and α 1 be any elements in R d, and β any positive number. Then there exists an element α 2 in R d such that α 2 α 1 C x 2 x 1 + β, and L(x 2, α 2 ) L(x 1, α 1 ) + C x 2 x 1.
31 Proof Given a point X n at time t n there is a function α : [t n, t n+1 ] R d, such that α(t) α(t) C X n X (t) + β, and L( X n, α(t)) L(X (t), α(t)) + C X n X (t). Let X 0 = x s and α : [t 0, t 1 ] R d as above. Let α 0 = 1 t t1 t 0 αdt, X1 = X 0 + t α 0. With this X 1 we define α : [t 1, t 2 ] R d, and so on. Then X n X (t n ) = O( t).
32 Proof T 0 Therefore L(X (t), α(t))dt N 1 tn+1 n=0 t n N 1 = t n=0 ( L( Xn, α(t)) C X n X (t) ) dt L( X n, α n ) O( t). u δ (x s, 0) ū(x s, 0) t N 1 n=0 L( X N 1 n, α n ) + g(x (T )) n=0 L( X n, α n ) g( X N ) O( t) = O( t)
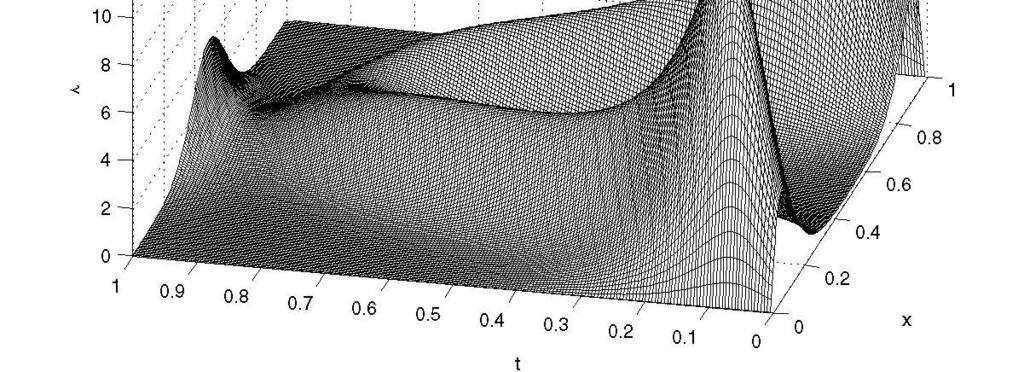
33 t Nondifferentiable Hamiltonian example contd δ=1/30 δ=1/ X
34 t Nondifferentiable Hamiltonian example contd. (SPI) x
35 Differential inclusions By letting F (x) = a A f (x, a), control problems may be viewed as differential inclusions: X (t) F ( X (t) ), X (0) = X 0,
36 Forward Euler Method ξ n+1 ξ n + tf (ξ n ), n = 0, 1,..., N 1, t = T N ξ 0 = x 0. Need concept of distance between sets in order to compare solution sets. Hausdorff distance: where H(C, D) = inf { λ 0 C D + λb and D C + λb }. C + D = { c + d c C and d D }, λc = { λc c C }.
37 Attainable sets: C n = { X (n t) X : [0, T ] R d solves X F (X ) }, D n = { ξ n {ξ i } N i=0 solves ξ n+1 ξ n + tf (ξ n ) }. Theorem Let F be a bounded and Lipschitz continuous (w.r.t. Hausdorff dist.) function from R d into the non-empty compact subsets of R d. Then max 0 n N H(C n, D n ) K t. (Result for F convex-valued by Dontchev and Farkhi (Computing, 1989), extended to non-convex-valued F by S. in SINUM (2008/2009), no. 1.)
38 Allen-Cahn as model problem for phase transitions ϕ t = δϕ xx δ 1 V (ϕ) + εη, ϕ(0, t) = ϕ(1, t) = 0. (5) Two stable equilibria: φ φ x
39 Goal: Find the probability of transition from ϕ + to ϕ in the finite time T. Use theory of large deviations. (Done by E, Ren, Vanden-Eijnden, Comm. Pure Appl. Math. 2004)
40 Large Deviations for ODE Consider first the SODE dx ε = b(x ε )dt + ε dw, X ε (0) = x 0, in the interval [0, T ]. Probability of rare events obtained using the action functional S(ξ) = 1 2 T 0 ξ (t) b ( ξ(t) ) 2 dt. Theorem Suppose D is a domain in R d such that the boundary of D coincides with the boundary of its closure. Then lim ε 0 ε log P{ X ε (T ) D } = inf { S(ξ) : ξ(0) = x 0, ξ(t ) D }. (Freidlin-Wentzell, Random Perturbations of Dynamical Systems) Hence, P { X ε (T ) D } exp( inf{s(ξ)}/ε).
41 Large Deviations for PDE The SODE case is extended to the present SPDE in e.g. W. Faris, G. Jona-Lasinio, J. Phys. A: Math. Gen. 15 (1982). Action functional I (ϕ) = 1 2 T ( ϕt δϕ xx + δ 1 V (ϕ) ) 2 dx dt.
42 Large Deviations for PDE Let S be an open subset of C([0, 1]). Let P ε be the probability that a solution ϕ to (5), with ϕ(0) = ϕ + satisfies ϕ(t ) S. Then and where I (S) lim inf ε 0 ε log P ε lim sup ε log P ε I ( S) ε 0 I (S) = inf I (ϕ). Hence, P ε exp( I (S)/ε).
43 Formulate as optimal control problem. Minimize v ϕ+,0(α), where and ϕ solves v ϕ0,t 0 (α) = T t 0 h ( α(t) ) dt + g ( ϕ(t ) ) h(α) = α 2 L 2 (0,1) /2, g(ϕ T ) = K ϕ T ϕ 2 L 2 (0,1) ϕ t = δϕ xx δ 1 V (ϕ) + α, ϕ(t 0 ) = ϕ 0. Introduce the value function and Hamiltonian u(ϕ 0, t 0 ) = inf { v ϕ0,t 0 (α) : α L 2( t 0, T ; L 2 (0, 1) )} H(λ, ϕ) = min = 1 α ( δλ x ϕ x δ 1 λv (ϕ) + λα + α2 2 )dx ( δλ x ϕ x δ 1 λv (ϕ) λ2 2 )dx
44 Spatial Discretization Introduce value function ū defined on FEM space V = {piecewise linear} ū( ϕ 0, t 0 ) = inf { T g( ϕ(t )) + h(ᾱ)ds : t 0 where ϕ C(t 0, T ; V ) solves ϕ(t 0 ) = ϕ 0, ᾱ L 2 (t 0, T ; V ) } ( ϕ t, v) = δ( ϕ x, v x ) + ( δ 1 V ( ϕ) + ᾱ, v), for all v V. Note however that T t 0 h(ᾱ)ds 1 2 T t 0 ϕ t δ ϕ xx + δ 1 V ( ϕ) 2 L 2 (0,1) ds. (The last integral is not well-defined since ϕ(, t) H 2 (0, 1)).
45 Theorem Let ϕ 0 V. Denote an optimal pair (control and state) for u(ϕ 0, t 0 ) by α : [t 0, T ] L 2 and ϕ : [t 0, T ] L 2 and an optimal pair for ū(ϕ 0, t 0 ) by ᾱ : [t 0, T ] V and ϕ : [t 0, T ] V. Then T t 0 ( p t (s) + H ( Pp ϕ(s), ϕ(s) )) ds ū(ϕ 0, t 0 ) u(ϕ 0, t 0 ) g ( Pϕ(T ) ) g ( ϕ(t ) ) + T t 0 ( H ( p # ϕ (s), Pϕ(s) ) H ( p # ϕ (s), ϕ(s) )) ds where p (s) = ( p ϕ(s), p t (s) ) L 2 (0, 1) R is any measurable function with values in D + u( ϕ(s), s), and p # (s) = ( p # ϕ (s), p # t (s) ) V R is any measurable function with values in D + ū(pϕ(s), s).
46 Proof. First inequality ū(ϕ 0, t 0 ) u(ϕ 0, t 0 ) =g ( ϕ(t ) ) + T t 0 h(ᾱ)dt u ( ϕ 0, t 0 ) =u ( ϕ(t ), T ) u ( ) T ϕ(t 0 ), t 0 + h(ᾱ)dt T = t 0 ( d dt u( ϕ(t), t ) + h ( ᾱ(t) )) dt Use that u is semiconcave (Cannarsa, Frankowska, Appl. Math. Optim. 26 (1992) p and 33 (1996) p. 1-33). The backward derivative satisfies almost everywhere that d dt u( ϕ(t), t ) p t (t) + ( p ϕ(t), ϕ t (t) ). ϕ t V (p ϕ, ϕ t ) = (Pp ϕ, ϕ t ). t 0
47 Hence the lower bound: d dt u( ϕ(t), t ) + h ( ᾱ(t) ) pt (t) + ( ϕ t (t), Ppϕ(t) ) + h ( ᾱ(t) ) = pt (t) δ ( ϕ x (t), (Ppϕ(t)) ) ( x δ 1 V ( ϕ(t) ) ), Pp (t) since H(λ, ϕ) = + ( ᾱ(t), Pp ϕ(t) ) ᾱ(t) 2 p t (t) + H ( Pp ϕ(t), ϕ(t) ), ( min δ(ϕ x, λ x ) δ 1( V (ϕ), λ ) α L 2 (0,1) Second inequality proved similarly. + (α, λ) α 2).
48 An element in D + u(ϕ 0, s) is given by ( λ(s), H ( λ(s), ϕ 0 ) ), where λ solves λ t = δλ xx δ 1 λv (ϕ), λ(t ) = 2K ( ϕ(t ) ϕ ).
49 Must estimate T t 0 ( H ( Pλ ϕ(s) (s), ϕ(s) ) H ( λ ϕ(s) (s), ϕ(s) )) ds. time T ϕ ϕ ϕ ϕ state
50 Must estimate T t 0 ( H ( Pλ ϕ(s) (s), ϕ(s) ) H ( λ ϕ(s) (s), ϕ(s) )) ds. time T ϕ ϕ ϕ ϕ state Theorem u(ϕ +, 0) ū(pϕ +, 0) = O( x 2 )
51 The Symplectic Euler Method ϕ n+1 = ϕ n + th λ ( λ n+1, ϕ n ), λ n = λ n+1 + th ϕ ( λ n+1, ϕ n ),
52 The Symplectic Euler Method ϕ n+1 = ϕ n + th λ ( λ n+1, ϕ n ), λ n = λ n+1 + th ϕ ( λ n+1, ϕ n ), Symplectic Euler solved in three steps
53 The Symplectic Euler Method ϕ n+1 = ϕ n + th λ ( λ n+1, ϕ n ), λ n = λ n+1 + th ϕ ( λ n+1, ϕ n ), Symplectic Euler solved in three steps Damped fixed point iterations in order to obtain good starting position for next step.
54 The Symplectic Euler Method ϕ n+1 = ϕ n + th λ ( λ n+1, ϕ n ), λ n = λ n+1 + th ϕ ( λ n+1, ϕ n ), Symplectic Euler solved in three steps Damped fixed point iterations in order to obtain good starting position for next step. Newton iterations.
55 The Symplectic Euler Method ϕ n+1 = ϕ n + th λ ( λ n+1, ϕ n ), λ n = λ n+1 + th ϕ ( λ n+1, ϕ n ), Symplectic Euler solved in three steps Damped fixed point iterations in order to obtain good starting position for next step. Newton iterations. Parameters K and δ and the grid size changed in subsequent Newton iterations.
56 x x
57
58 Thank you!
T h(x(t), α(t)) dt + g(x(t )), (1.1)
, α(t)) dt + g(x(t )), (1.1)") AN A POSTERIORI ERROR ESTIMATE FOR SYMPLECTIC EULER APPROXIMATION OF OPTIMAL CONTROL PROBLEMS JESPER KARLSSON, STIG LARSSON, MATTIAS SANDBERG, ANDERS SZEPESSY, AND RAÙL TEMPONE Abstract. This work focuses
AN A POSTERIORI ERROR ESTIMATE FOR SYMPLECTIC EULER APPROXIMATION OF OPTIMAL CONTROL PROBLEMS JESPER KARLSSON, STIG LARSSON, MATTIAS SANDBERG, ANDERS SZEPESSY, AND RAÙL TEMPONE Abstract. This work focuses
Differential Games II. Marc Quincampoix Université de Bretagne Occidentale ( Brest-France) SADCO, London, September 2011
 SADCO, London, September 2011") Differential Games II Marc Quincampoix Université de Bretagne Occidentale ( Brest-France) SADCO, London, September 2011 Contents 1. I Introduction: A Pursuit Game and Isaacs Theory 2. II Strategies 3.
Differential Games II Marc Quincampoix Université de Bretagne Occidentale ( Brest-France) SADCO, London, September 2011 Contents 1. I Introduction: A Pursuit Game and Isaacs Theory 2. II Strategies 3.
Mean field games and related models
 Mean field games and related models Fabio Camilli SBAI-Dipartimento di Scienze di Base e Applicate per l Ingegneria Facoltà di Ingegneria Civile ed Industriale Email: Camilli@dmmm.uniroma1.it Web page:
Mean field games and related models Fabio Camilli SBAI-Dipartimento di Scienze di Base e Applicate per l Ingegneria Facoltà di Ingegneria Civile ed Industriale Email: Camilli@dmmm.uniroma1.it Web page:
Mattias Sandberg 1 and Anders Szepessy 1
 ESAIM: M2AN Vol. 40, N o 1, 2006, pp. 149 173 DOI: 10.1051/m2an:2006002 ESAIM: Mathematical Modelling and Numerical Analysis www.edpsciences.org/m2an CONVERGENCE RATES OF SYMPLECTIC PONTRYAGIN APPROXIMATIONS
ESAIM: M2AN Vol. 40, N o 1, 2006, pp. 149 173 DOI: 10.1051/m2an:2006002 ESAIM: Mathematical Modelling and Numerical Analysis www.edpsciences.org/m2an CONVERGENCE RATES OF SYMPLECTIC PONTRYAGIN APPROXIMATIONS
Semiconcavity and optimal control: an intrinsic approach
 Semiconcavity and optimal control: an intrinsic approach Peter R. Wolenski joint work with Piermarco Cannarsa and Francesco Marino Louisiana State University SADCO summer school, London September 5-9,
Semiconcavity and optimal control: an intrinsic approach Peter R. Wolenski joint work with Piermarco Cannarsa and Francesco Marino Louisiana State University SADCO summer school, London September 5-9,
Controlled Diffusions and Hamilton-Jacobi Bellman Equations
 Controlled Diffusions and Hamilton-Jacobi Bellman Equations Emo Todorov Applied Mathematics and Computer Science & Engineering University of Washington Winter 2014 Emo Todorov (UW) AMATH/CSE 579, Winter
Controlled Diffusions and Hamilton-Jacobi Bellman Equations Emo Todorov Applied Mathematics and Computer Science & Engineering University of Washington Winter 2014 Emo Todorov (UW) AMATH/CSE 579, Winter
MATH 819 FALL We considered solutions of this equation on the domain Ū, where
 MATH 89 FALL. The D linear wave equation weak solutions We have considered the initial value problem for the wave equation in one space dimension: (a) (b) (c) u tt u xx = f(x, t) u(x, ) = g(x), u t (x,
MATH 89 FALL. The D linear wave equation weak solutions We have considered the initial value problem for the wave equation in one space dimension: (a) (b) (c) u tt u xx = f(x, t) u(x, ) = g(x), u t (x,
Some Properties of NSFDEs
 Chenggui Yuan (Swansea University) Some Properties of NSFDEs 1 / 41 Some Properties of NSFDEs Chenggui Yuan Swansea University Chenggui Yuan (Swansea University) Some Properties of NSFDEs 2 / 41 Outline
Chenggui Yuan (Swansea University) Some Properties of NSFDEs 1 / 41 Some Properties of NSFDEs Chenggui Yuan Swansea University Chenggui Yuan (Swansea University) Some Properties of NSFDEs 2 / 41 Outline
Pontryagin Approximations for Optimal Design
 Pontryagin Approximations for Optimal Design JESPER CARLSSON Licentiate Thesis in Numerical Analysis Stockholm, Sweden 2006 Pontryagin Approximations for Optimal Design JESPER CARLSSON Avhandling som
Pontryagin Approximations for Optimal Design JESPER CARLSSON Licentiate Thesis in Numerical Analysis Stockholm, Sweden 2006 Pontryagin Approximations for Optimal Design JESPER CARLSSON Avhandling som
Mean-field SDE driven by a fractional BM. A related stochastic control problem
 Mean-field SDE driven by a fractional BM. A related stochastic control problem Rainer Buckdahn, Université de Bretagne Occidentale, Brest Durham Symposium on Stochastic Analysis, July 1th to July 2th,
Mean-field SDE driven by a fractional BM. A related stochastic control problem Rainer Buckdahn, Université de Bretagne Occidentale, Brest Durham Symposium on Stochastic Analysis, July 1th to July 2th,
Pontryagin Approximations for Optimal Design
 Pontryagin Approximations for Optimal Design Jesper Carlsson CSC, KTH BIT Conference, 2006 Optimal shape problem Find domain D R d such that inf F(ϕ) dx D D ff, G(ϕ) = 0 in D ad D Parameter design problem
Pontryagin Approximations for Optimal Design Jesper Carlsson CSC, KTH BIT Conference, 2006 Optimal shape problem Find domain D R d such that inf F(ϕ) dx D D ff, G(ϕ) = 0 in D ad D Parameter design problem
Stochastic optimal control with rough paths
 Stochastic optimal control with rough paths Paul Gassiat TU Berlin Stochastic processes and their statistics in Finance, Okinawa, October 28, 2013 Joint work with Joscha Diehl and Peter Friz Introduction
Stochastic optimal control with rough paths Paul Gassiat TU Berlin Stochastic processes and their statistics in Finance, Okinawa, October 28, 2013 Joint work with Joscha Diehl and Peter Friz Introduction
Price formation models Diogo A. Gomes
 models Diogo A. Gomes Here, we are interested in the price formation in electricity markets where: a large number of agents owns storage devices that can be charged and later supply the grid with electricity;
models Diogo A. Gomes Here, we are interested in the price formation in electricity markets where: a large number of agents owns storage devices that can be charged and later supply the grid with electricity;
Topology of the set of singularities of a solution of the Hamilton-Jacobi Equation
 Topology of the set of singularities of a solution of the Hamilton-Jacobi Equation Albert Fathi IAS Princeton March 15, 2016 In this lecture, a singularity for a locally Lipschitz real valued function
Topology of the set of singularities of a solution of the Hamilton-Jacobi Equation Albert Fathi IAS Princeton March 15, 2016 In this lecture, a singularity for a locally Lipschitz real valued function
Mean Field Games on networks
 Mean Field Games on networks Claudio Marchi Università di Padova joint works with: S. Cacace (Rome) and F. Camilli (Rome) C. Marchi (Univ. of Padova) Mean Field Games on networks Roma, June 14 th, 2017
Mean Field Games on networks Claudio Marchi Università di Padova joint works with: S. Cacace (Rome) and F. Camilli (Rome) C. Marchi (Univ. of Padova) Mean Field Games on networks Roma, June 14 th, 2017
Existence and uniqueness results for the MFG system
 Existence and uniqueness results for the MFG system P. Cardaliaguet Paris-Dauphine Based on Lasry-Lions (2006) and Lions lectures at Collège de France IMA Special Short Course Mean Field Games", November
Existence and uniqueness results for the MFG system P. Cardaliaguet Paris-Dauphine Based on Lasry-Lions (2006) and Lions lectures at Collège de France IMA Special Short Course Mean Field Games", November
Introduction to multiscale modeling and simulation. Explicit methods for ODEs : forward Euler. y n+1 = y n + tf(y n ) dy dt = f(y), y(0) = y 0
 dy dt = f(y), y(0) = y 0") Introduction to multiscale modeling and simulation Lecture 5 Numerical methods for ODEs, SDEs and PDEs The need for multiscale methods Two generic frameworks for multiscale computation Explicit methods
Introduction to multiscale modeling and simulation Lecture 5 Numerical methods for ODEs, SDEs and PDEs The need for multiscale methods Two generic frameworks for multiscale computation Explicit methods
Introduction to Optimal Control Theory and Hamilton-Jacobi equations. Seung Yeal Ha Department of Mathematical Sciences Seoul National University
 Introduction to Optimal Control Theory and Hamilton-Jacobi equations Seung Yeal Ha Department of Mathematical Sciences Seoul National University 1 A priori message from SYHA The main purpose of these series
Introduction to Optimal Control Theory and Hamilton-Jacobi equations Seung Yeal Ha Department of Mathematical Sciences Seoul National University 1 A priori message from SYHA The main purpose of these series
Ordinary Differential Equation Theory
 Part I Ordinary Differential Equation Theory 1 Introductory Theory An n th order ODE for y = y(t) has the form Usually it can be written F (t, y, y,.., y (n) ) = y (n) = f(t, y, y,.., y (n 1) ) (Implicit
Part I Ordinary Differential Equation Theory 1 Introductory Theory An n th order ODE for y = y(t) has the form Usually it can be written F (t, y, y,.., y (n) ) = y (n) = f(t, y, y,.., y (n 1) ) (Implicit
Metastability for interacting particles in double-well potentials and Allen Cahn SPDEs
 Nils Berglund nils.berglund@univ-orleans.fr http://www.univ-orleans.fr/mapmo/membres/berglund/ SPA 2017 Contributed Session: Interacting particle systems Metastability for interacting particles in double-well
Nils Berglund nils.berglund@univ-orleans.fr http://www.univ-orleans.fr/mapmo/membres/berglund/ SPA 2017 Contributed Session: Interacting particle systems Metastability for interacting particles in double-well
Non-Differentiable Embedding of Lagrangian structures
 Non-Differentiable Embedding of Lagrangian structures Isabelle Greff Joint work with J. Cresson Université de Pau et des Pays de l Adour CNAM, Paris, April, 22nd 2010 Position of the problem 1. Example
Non-Differentiable Embedding of Lagrangian structures Isabelle Greff Joint work with J. Cresson Université de Pau et des Pays de l Adour CNAM, Paris, April, 22nd 2010 Position of the problem 1. Example
An introduction to Mathematical Theory of Control
 An introduction to Mathematical Theory of Control Vasile Staicu University of Aveiro UNICA, May 2018 Vasile Staicu (University of Aveiro) An introduction to Mathematical Theory of Control UNICA, May 2018
An introduction to Mathematical Theory of Control Vasile Staicu University of Aveiro UNICA, May 2018 Vasile Staicu (University of Aveiro) An introduction to Mathematical Theory of Control UNICA, May 2018
Neighboring feasible trajectories in infinite dimension
 Neighboring feasible trajectories in infinite dimension Marco Mazzola Université Pierre et Marie Curie (Paris 6) H. Frankowska and E. M. Marchini Control of State Constrained Dynamical Systems Padova,
Neighboring feasible trajectories in infinite dimension Marco Mazzola Université Pierre et Marie Curie (Paris 6) H. Frankowska and E. M. Marchini Control of State Constrained Dynamical Systems Padova,
Thuong Nguyen. SADCO Internal Review Metting
 Asymptotic behavior of singularly perturbed control system: non-periodic setting Thuong Nguyen (Joint work with A. Siconolfi) SADCO Internal Review Metting Rome, Nov 10-12, 2014 Thuong Nguyen (Roma Sapienza)
Asymptotic behavior of singularly perturbed control system: non-periodic setting Thuong Nguyen (Joint work with A. Siconolfi) SADCO Internal Review Metting Rome, Nov 10-12, 2014 Thuong Nguyen (Roma Sapienza)
Deterministic Dynamic Programming
 Deterministic Dynamic Programming 1 Value Function Consider the following optimal control problem in Mayer s form: V (t 0, x 0 ) = inf u U J(t 1, x(t 1 )) (1) subject to ẋ(t) = f(t, x(t), u(t)), x(t 0
Deterministic Dynamic Programming 1 Value Function Consider the following optimal control problem in Mayer s form: V (t 0, x 0 ) = inf u U J(t 1, x(t 1 )) (1) subject to ẋ(t) = f(t, x(t), u(t)), x(t 0
Continuous dependence estimates for the ergodic problem with an application to homogenization
 Continuous dependence estimates for the ergodic problem with an application to homogenization Claudio Marchi Bayreuth, September 12 th, 2013 C. Marchi (Università di Padova) Continuous dependence Bayreuth,
Continuous dependence estimates for the ergodic problem with an application to homogenization Claudio Marchi Bayreuth, September 12 th, 2013 C. Marchi (Università di Padova) Continuous dependence Bayreuth,
Exam February h
 Master 2 Mathématiques et Applications PUF Ho Chi Minh Ville 2009/10 Viscosity solutions, HJ Equations and Control O.Ley (INSA de Rennes) Exam February 2010 3h Written-by-hands documents are allowed. Printed
Master 2 Mathématiques et Applications PUF Ho Chi Minh Ville 2009/10 Viscosity solutions, HJ Equations and Control O.Ley (INSA de Rennes) Exam February 2010 3h Written-by-hands documents are allowed. Printed
Minimal time mean field games
 based on joint works with Samer Dweik and Filippo Santambrogio PGMO Days 2017 Session Mean Field Games and applications EDF Lab Paris-Saclay November 14th, 2017 LMO, Université Paris-Sud Université Paris-Saclay
based on joint works with Samer Dweik and Filippo Santambrogio PGMO Days 2017 Session Mean Field Games and applications EDF Lab Paris-Saclay November 14th, 2017 LMO, Université Paris-Sud Université Paris-Saclay
HJB equations. Seminar in Stochastic Modelling in Economics and Finance January 10, 2011
 Department of Probability and Mathematical Statistics Faculty of Mathematics and Physics, Charles University in Prague petrasek@karlin.mff.cuni.cz Seminar in Stochastic Modelling in Economics and Finance
Department of Probability and Mathematical Statistics Faculty of Mathematics and Physics, Charles University in Prague petrasek@karlin.mff.cuni.cz Seminar in Stochastic Modelling in Economics and Finance
Lecture 5: Importance sampling and Hamilton-Jacobi equations
 Lecture 5: Importance sampling and Hamilton-Jacobi equations Henrik Hult Department of Mathematics KTH Royal Institute of Technology Sweden Summer School on Monte Carlo Methods and Rare Events Brown University,
Lecture 5: Importance sampling and Hamilton-Jacobi equations Henrik Hult Department of Mathematics KTH Royal Institute of Technology Sweden Summer School on Monte Carlo Methods and Rare Events Brown University,
Mañé s Conjecture from the control viewpoint
 Mañé s Conjecture from the control viewpoint Université de Nice - Sophia Antipolis Setting Let M be a smooth compact manifold of dimension n 2 be fixed. Let H : T M R be a Hamiltonian of class C k, with
Mañé s Conjecture from the control viewpoint Université de Nice - Sophia Antipolis Setting Let M be a smooth compact manifold of dimension n 2 be fixed. Let H : T M R be a Hamiltonian of class C k, with
LINEAR-CONVEX CONTROL AND DUALITY
 1 LINEAR-CONVEX CONTROL AND DUALITY R.T. Rockafellar Department of Mathematics, University of Washington Seattle, WA 98195-4350, USA Email: rtr@math.washington.edu R. Goebel 3518 NE 42 St., Seattle, WA
1 LINEAR-CONVEX CONTROL AND DUALITY R.T. Rockafellar Department of Mathematics, University of Washington Seattle, WA 98195-4350, USA Email: rtr@math.washington.edu R. Goebel 3518 NE 42 St., Seattle, WA
Scaling Limits of Waves in Convex Scalar Conservation Laws under Random Initial Perturbations
 Scaling Limits of Waves in Convex Scalar Conservation Laws under Random Initial Perturbations Jan Wehr and Jack Xin Abstract We study waves in convex scalar conservation laws under noisy initial perturbations.
Scaling Limits of Waves in Convex Scalar Conservation Laws under Random Initial Perturbations Jan Wehr and Jack Xin Abstract We study waves in convex scalar conservation laws under noisy initial perturbations.
p 1 ( Y p dp) 1/p ( X p dp) 1 1 p
 1/p ( X p dp) 1 1 p") Doob s inequality Let X(t) be a right continuous submartingale with respect to F(t), t 1 P(sup s t X(s) λ) 1 λ {sup s t X(s) λ} X + (t)dp 2 For 1 < p
Doob s inequality Let X(t) be a right continuous submartingale with respect to F(t), t 1 P(sup s t X(s) λ) 1 λ {sup s t X(s) λ} X + (t)dp 2 For 1 < p
Regularity of solutions to Hamilton-Jacobi equations for Tonelli Hamiltonians
 Regularity of solutions to Hamilton-Jacobi equations for Tonelli Hamiltonians Université Nice Sophia Antipolis & Institut Universitaire de France Nonlinear Analysis and Optimization Royal Society, London,
Regularity of solutions to Hamilton-Jacobi equations for Tonelli Hamiltonians Université Nice Sophia Antipolis & Institut Universitaire de France Nonlinear Analysis and Optimization Royal Society, London,
x R d, λ R, f smooth enough. Goal: compute ( follow ) equilibrium solutions as λ varies, i.e. compute solutions (x, λ) to 0 = f(x, λ).
 equilibrium solutions as λ varies, i.e. compute solutions (x, λ) to 0 = f(x, λ).") Continuation of equilibria Problem Parameter-dependent ODE ẋ = f(x, λ), x R d, λ R, f smooth enough. Goal: compute ( follow ) equilibrium solutions as λ varies, i.e. compute solutions (x, λ) to 0 = f(x,
Continuation of equilibria Problem Parameter-dependent ODE ẋ = f(x, λ), x R d, λ R, f smooth enough. Goal: compute ( follow ) equilibrium solutions as λ varies, i.e. compute solutions (x, λ) to 0 = f(x,
Recent Trends in Differential Inclusions
 Recent Trends in Alberto Bressan Department of Mathematics, Penn State University (Aveiro, June 2016) (Aveiro, June 2016) 1 / Two main topics ẋ F (x) differential inclusions with upper semicontinuous,
Recent Trends in Alberto Bressan Department of Mathematics, Penn State University (Aveiro, June 2016) (Aveiro, June 2016) 1 / Two main topics ẋ F (x) differential inclusions with upper semicontinuous,
Lecture 3. Topology of the set of singularities of a solution of the Hamilton-Jacobi Equation
 Lecture 3. Topology of the set of singularities of a solution of the Hamilton-Jacobi Equation Albert Fathi Padova, 14 February 2018 We will present results which are a joint work with Piermarco Cannarsa
Lecture 3. Topology of the set of singularities of a solution of the Hamilton-Jacobi Equation Albert Fathi Padova, 14 February 2018 We will present results which are a joint work with Piermarco Cannarsa
FUNCTIONAL ANALYSIS HAHN-BANACH THEOREM. F (m 2 ) + α m 2 + x 0
 + α m 2 + x 0") FUNCTIONAL ANALYSIS HAHN-BANACH THEOREM If M is a linear subspace of a normal linear space X and if F is a bounded linear functional on M then F can be extended to M + [x 0 ] without changing its norm.
FUNCTIONAL ANALYSIS HAHN-BANACH THEOREM If M is a linear subspace of a normal linear space X and if F is a bounded linear functional on M then F can be extended to M + [x 0 ] without changing its norm.
SPDEs, criticality, and renormalisation
 SPDEs, criticality, and renormalisation Hendrik Weber Mathematics Institute University of Warwick Potsdam, 06.11.2013 An interesting model from Physics I Ising model Spin configurations: Energy: Inverse
SPDEs, criticality, and renormalisation Hendrik Weber Mathematics Institute University of Warwick Potsdam, 06.11.2013 An interesting model from Physics I Ising model Spin configurations: Energy: Inverse
Hamilton-Jacobi theory for optimal control problems on stratified domains
 Louisiana State University LSU Digital Commons LSU Doctoral Dissertations Graduate School 2010 Hamilton-Jacobi theory for optimal control problems on stratified domains Richard Charles Barnard Louisiana
Louisiana State University LSU Digital Commons LSU Doctoral Dissertations Graduate School 2010 Hamilton-Jacobi theory for optimal control problems on stratified domains Richard Charles Barnard Louisiana
Nonlinear stabilization via a linear observability
 via a linear observability Kaïs Ammari Department of Mathematics University of Monastir Joint work with Fathia Alabau-Boussouira Collocated feedback stabilization Outline 1 Introduction and main result
via a linear observability Kaïs Ammari Department of Mathematics University of Monastir Joint work with Fathia Alabau-Boussouira Collocated feedback stabilization Outline 1 Introduction and main result
Dynamical systems with Gaussian and Levy noise: analytical and stochastic approaches
 Dynamical systems with Gaussian and Levy noise: analytical and stochastic approaches Noise is often considered as some disturbing component of the system. In particular physical situations, noise becomes
Dynamical systems with Gaussian and Levy noise: analytical and stochastic approaches Noise is often considered as some disturbing component of the system. In particular physical situations, noise becomes
Duality and dynamics in Hamilton-Jacobi theory for fully convex problems of control
 Duality and dynamics in Hamilton-Jacobi theory for fully convex problems of control RTyrrell Rockafellar and Peter R Wolenski Abstract This paper describes some recent results in Hamilton- Jacobi theory
Duality and dynamics in Hamilton-Jacobi theory for fully convex problems of control RTyrrell Rockafellar and Peter R Wolenski Abstract This paper describes some recent results in Hamilton- Jacobi theory
Introduction to numerical methods for Ordinary Differential Equations
 Introduction to numerical methods for Ordinary Differential Equations Charles-Edouard Bréhier Abstract The aims of these lecture notes are the following. We introduce Euler numerical schemes, and prove
Introduction to numerical methods for Ordinary Differential Equations Charles-Edouard Bréhier Abstract The aims of these lecture notes are the following. We introduce Euler numerical schemes, and prove
Math Partial Differential Equations 1
 Math 9 - Partial Differential Equations Homework 5 and Answers. The one-dimensional shallow water equations are h t + (hv) x, v t + ( v + h) x, or equivalently for classical solutions, h t + (hv) x, (hv)
Math 9 - Partial Differential Equations Homework 5 and Answers. The one-dimensional shallow water equations are h t + (hv) x, v t + ( v + h) x, or equivalently for classical solutions, h t + (hv) x, (hv)
BSDEs and PDEs with discontinuous coecients Applications to homogenization K. Bahlali, A. Elouain, E. Pardoux. Jena, March 2009
 BSDEs and PDEs with discontinuous coecients Applications to homogenization K. Bahlali, A. Elouain, E. Pardoux. Jena, 16-20 March 2009 1 1) L p viscosity solution to 2nd order semilinear parabolic PDEs
BSDEs and PDEs with discontinuous coecients Applications to homogenization K. Bahlali, A. Elouain, E. Pardoux. Jena, 16-20 March 2009 1 1) L p viscosity solution to 2nd order semilinear parabolic PDEs
Variational approach to mean field games with density constraints
 1 / 18 Variational approach to mean field games with density constraints Alpár Richárd Mészáros LMO, Université Paris-Sud (based on ongoing joint works with F. Santambrogio, P. Cardaliaguet and F. J. Silva)
1 / 18 Variational approach to mean field games with density constraints Alpár Richárd Mészáros LMO, Université Paris-Sud (based on ongoing joint works with F. Santambrogio, P. Cardaliaguet and F. J. Silva)
Real Time Stochastic Control and Decision Making: From theory to algorithms and applications
 Real Time Stochastic Control and Decision Making: From theory to algorithms and applications Evangelos A. Theodorou Autonomous Control and Decision Systems Lab Challenges in control Uncertainty Stochastic
Real Time Stochastic Control and Decision Making: From theory to algorithms and applications Evangelos A. Theodorou Autonomous Control and Decision Systems Lab Challenges in control Uncertainty Stochastic
Mathematical Methods for Neurosciences. ENS - Master MVA Paris 6 - Master Maths-Bio ( )
") Mathematical Methods for Neurosciences. ENS - Master MVA Paris 6 - Master Maths-Bio (2014-2015) Etienne Tanré - Olivier Faugeras INRIA - Team Tosca November 26th, 2014 E. Tanré (INRIA - Team Tosca) Mathematical
Mathematical Methods for Neurosciences. ENS - Master MVA Paris 6 - Master Maths-Bio (2014-2015) Etienne Tanré - Olivier Faugeras INRIA - Team Tosca November 26th, 2014 E. Tanré (INRIA - Team Tosca) Mathematical
On a Lyapunov Functional Relating Shortening Curves and Viscous Conservation Laws
 On a Lyapunov Functional Relating Shortening Curves and Viscous Conservation Laws Stefano Bianchini and Alberto Bressan S.I.S.S.A., Via Beirut 4, Trieste 34014 Italy. E-mail addresses: bianchin@mis.mpg.de,
On a Lyapunov Functional Relating Shortening Curves and Viscous Conservation Laws Stefano Bianchini and Alberto Bressan S.I.S.S.A., Via Beirut 4, Trieste 34014 Italy. E-mail addresses: bianchin@mis.mpg.de,
String method for the Cahn-Hilliard dynamics
 String method for the Cahn-Hilliard dynamics Tiejun Li School of Mathematical Sciences Peking University tieli@pku.edu.cn Joint work with Wei Zhang and Pingwen Zhang Outline Background Problem Set-up Algorithms
String method for the Cahn-Hilliard dynamics Tiejun Li School of Mathematical Sciences Peking University tieli@pku.edu.cn Joint work with Wei Zhang and Pingwen Zhang Outline Background Problem Set-up Algorithms
IE 521 Convex Optimization
 Lecture 5: Convex II 6th February 2019 Convex Local Lipschitz Outline Local Lipschitz 1 / 23 Convex Local Lipschitz Convex Function: f : R n R is convex if dom(f ) is convex and for any λ [0, 1], x, y
Lecture 5: Convex II 6th February 2019 Convex Local Lipschitz Outline Local Lipschitz 1 / 23 Convex Local Lipschitz Convex Function: f : R n R is convex if dom(f ) is convex and for any λ [0, 1], x, y
Nonlinear representation, backward SDEs, and application to the Principal-Agent problem
 Nonlinear representation, backward SDEs, and application to the Principal-Agent problem Ecole Polytechnique, France April 4, 218 Outline The Principal-Agent problem Formulation 1 The Principal-Agent problem
Nonlinear representation, backward SDEs, and application to the Principal-Agent problem Ecole Polytechnique, France April 4, 218 Outline The Principal-Agent problem Formulation 1 The Principal-Agent problem
Value Function in deterministic optimal control : sensitivity relations of first and second order
 Séminaire de Calcul Scientifique du CERMICS Value Function in deterministic optimal control : sensitivity relations of first and second order Hélène Frankowska (IMJ-PRG) 8mars2018 Value Function in deterministic
Séminaire de Calcul Scientifique du CERMICS Value Function in deterministic optimal control : sensitivity relations of first and second order Hélène Frankowska (IMJ-PRG) 8mars2018 Value Function in deterministic
Stability of Stochastic Differential Equations
 Lyapunov stability theory for ODEs s Stability of Stochastic Differential Equations Part 1: Introduction Department of Mathematics and Statistics University of Strathclyde Glasgow, G1 1XH December 2010
Lyapunov stability theory for ODEs s Stability of Stochastic Differential Equations Part 1: Introduction Department of Mathematics and Statistics University of Strathclyde Glasgow, G1 1XH December 2010
Large Deviations Principles for McKean-Vlasov SDEs, Skeletons, Supports and the law of iterated logarithm
 Large Deviations Principles for McKean-Vlasov SDEs, Skeletons, Supports and the law of iterated logarithm Gonçalo dos Reis University of Edinburgh (UK) & CMA/FCT/UNL (PT) jointly with: W. Salkeld, U. of
Large Deviations Principles for McKean-Vlasov SDEs, Skeletons, Supports and the law of iterated logarithm Gonçalo dos Reis University of Edinburgh (UK) & CMA/FCT/UNL (PT) jointly with: W. Salkeld, U. of
Properties of an infinite dimensional EDS system : the Muller s ratchet
 Properties of an infinite dimensional EDS system : the Muller s ratchet LATP June 5, 2011 A ratchet source : wikipedia Plan 1 Introduction : The model of Haigh 2 3 Hypothesis (Biological) : The population
Properties of an infinite dimensional EDS system : the Muller s ratchet LATP June 5, 2011 A ratchet source : wikipedia Plan 1 Introduction : The model of Haigh 2 3 Hypothesis (Biological) : The population
Lipschitz continuity for solutions of Hamilton-Jacobi equation with Ornstein-Uhlenbeck operator
 Lipschitz continuity for solutions of Hamilton-Jacobi equation with Ornstein-Uhlenbeck operator Thi Tuyen Nguyen Ph.D student of University of Rennes 1 Joint work with: Prof. E. Chasseigne(University of
Lipschitz continuity for solutions of Hamilton-Jacobi equation with Ornstein-Uhlenbeck operator Thi Tuyen Nguyen Ph.D student of University of Rennes 1 Joint work with: Prof. E. Chasseigne(University of
MIN-MAX REPRESENTATIONS OF VISCOSITY SOLUTIONS OF HAMILTON-JACOBI EQUATIONS AND APPLICATIONS IN RARE-EVENT SIMULATION
 MIN-MAX REPRESENTATIONS OF VISCOSITY SOLUTIONS OF HAMILTON-JACOBI EQUATIONS AND APPLICATIONS IN RARE-EVENT SIMULATION BOUALEM DJEHICHE, HENRIK HULT, AND PIERRE NYQUIST Abstract. In this paper a duality
MIN-MAX REPRESENTATIONS OF VISCOSITY SOLUTIONS OF HAMILTON-JACOBI EQUATIONS AND APPLICATIONS IN RARE-EVENT SIMULATION BOUALEM DJEHICHE, HENRIK HULT, AND PIERRE NYQUIST Abstract. In this paper a duality
Applied Math Qualifying Exam 11 October Instructions: Work 2 out of 3 problems in each of the 3 parts for a total of 6 problems.
 Printed Name: Signature: Applied Math Qualifying Exam 11 October 2014 Instructions: Work 2 out of 3 problems in each of the 3 parts for a total of 6 problems. 2 Part 1 (1) Let Ω be an open subset of R
Printed Name: Signature: Applied Math Qualifying Exam 11 October 2014 Instructions: Work 2 out of 3 problems in each of the 3 parts for a total of 6 problems. 2 Part 1 (1) Let Ω be an open subset of R
Extremal Solutions of Differential Inclusions via Baire Category: a Dual Approach
 Extremal Solutions of Differential Inclusions via Baire Category: a Dual Approach Alberto Bressan Department of Mathematics, Penn State University University Park, Pa 1682, USA e-mail: bressan@mathpsuedu
Extremal Solutions of Differential Inclusions via Baire Category: a Dual Approach Alberto Bressan Department of Mathematics, Penn State University University Park, Pa 1682, USA e-mail: bressan@mathpsuedu
Joint work with Nguyen Hoang (Univ. Concepción, Chile) Padova, Italy, May 2018
 Padova, Italy, May 2018") EXTENDED EULER-LAGRANGE AND HAMILTONIAN CONDITIONS IN OPTIMAL CONTROL OF SWEEPING PROCESSES WITH CONTROLLED MOVING SETS BORIS MORDUKHOVICH Wayne State University Talk given at the conference Optimization,
EXTENDED EULER-LAGRANGE AND HAMILTONIAN CONDITIONS IN OPTIMAL CONTROL OF SWEEPING PROCESSES WITH CONTROLLED MOVING SETS BORIS MORDUKHOVICH Wayne State University Talk given at the conference Optimization,
HopfLax-Type Formula for u t +H(u, Du)=0*
=0*") journal of differential equations 126, 4861 (1996) article no. 0043 HopfLax-Type Formula for u t +H(u, Du)=0* E. N. Barron, - R. Jensen, and W. Liu 9 Department of Mathematical Sciences, Loyola University,
journal of differential equations 126, 4861 (1996) article no. 0043 HopfLax-Type Formula for u t +H(u, Du)=0* E. N. Barron, - R. Jensen, and W. Liu 9 Department of Mathematical Sciences, Loyola University,
Scaling Limits of Waves in Convex Scalar Conservation Laws Under Random Initial Perturbations
 Journal of Statistical Physics, Vol. 122, No. 2, January 2006 ( C 2006 ) DOI: 10.1007/s10955-005-8006-x Scaling Limits of Waves in Convex Scalar Conservation Laws Under Random Initial Perturbations Jan
Journal of Statistical Physics, Vol. 122, No. 2, January 2006 ( C 2006 ) DOI: 10.1007/s10955-005-8006-x Scaling Limits of Waves in Convex Scalar Conservation Laws Under Random Initial Perturbations Jan
Random attractors and the preservation of synchronization in the presence of noise
 Random attractors and the preservation of synchronization in the presence of noise Peter Kloeden Institut für Mathematik Johann Wolfgang Goethe Universität Frankfurt am Main Deterministic case Consider
Random attractors and the preservation of synchronization in the presence of noise Peter Kloeden Institut für Mathematik Johann Wolfgang Goethe Universität Frankfurt am Main Deterministic case Consider
Numerical Optimal Control Part 3: Function space methods
 Numerical Optimal Control Part 3: Function space methods SADCO Summer School and Workshop on Optimal and Model Predictive Control OMPC 2013, Bayreuth Institute of Mathematics and Applied Computing Department
Numerical Optimal Control Part 3: Function space methods SADCO Summer School and Workshop on Optimal and Model Predictive Control OMPC 2013, Bayreuth Institute of Mathematics and Applied Computing Department
SDE Coefficients. March 4, 2008
 SDE Coefficients March 4, 2008 The following is a summary of GARD sections 3.3 and 6., mainly as an overview of the two main approaches to creating a SDE model. Stochastic Differential Equations (SDE)
SDE Coefficients March 4, 2008 The following is a summary of GARD sections 3.3 and 6., mainly as an overview of the two main approaches to creating a SDE model. Stochastic Differential Equations (SDE)
A Concise Course on Stochastic Partial Differential Equations
 A Concise Course on Stochastic Partial Differential Equations Michael Röckner Reference: C. Prevot, M. Röckner: Springer LN in Math. 1905, Berlin (2007) And see the references therein for the original
A Concise Course on Stochastic Partial Differential Equations Michael Röckner Reference: C. Prevot, M. Röckner: Springer LN in Math. 1905, Berlin (2007) And see the references therein for the original
VISCOSITY SOLUTIONS OF HAMILTON-JACOBI EQUATIONS, AND ASYMPTOTICS FOR HAMILTONIAN SYSTEMS
 VISCOSITY SOLUTIONS OF HAMILTON-JACOBI EQUATIONS, AND ASYMPTOTICS FOR HAMILTONIAN SYSTEMS DIOGO AGUIAR GOMES U.C. Berkeley - CA, US and I.S.T. - Lisbon, Portugal email:dgomes@math.ist.utl.pt Abstract.
VISCOSITY SOLUTIONS OF HAMILTON-JACOBI EQUATIONS, AND ASYMPTOTICS FOR HAMILTONIAN SYSTEMS DIOGO AGUIAR GOMES U.C. Berkeley - CA, US and I.S.T. - Lisbon, Portugal email:dgomes@math.ist.utl.pt Abstract.
New Identities for Weak KAM Theory
 New Identities for Weak KAM Theory Lawrence C. Evans Department of Mathematics University of California, Berkeley Abstract This paper records for the Hamiltonian H = p + W (x) some old and new identities
New Identities for Weak KAM Theory Lawrence C. Evans Department of Mathematics University of California, Berkeley Abstract This paper records for the Hamiltonian H = p + W (x) some old and new identities
Non-linear wave equations. Hans Ringström. Department of Mathematics, KTH, Stockholm, Sweden
 Non-linear wave equations Hans Ringström Department of Mathematics, KTH, 144 Stockholm, Sweden Contents Chapter 1. Introduction 5 Chapter 2. Local existence and uniqueness for ODE:s 9 1. Background material
Non-linear wave equations Hans Ringström Department of Mathematics, KTH, 144 Stockholm, Sweden Contents Chapter 1. Introduction 5 Chapter 2. Local existence and uniqueness for ODE:s 9 1. Background material
ON WEAK SOLUTION OF A HYPERBOLIC DIFFERENTIAL INCLUSION WITH NONMONOTONE DISCONTINUOUS NONLINEAR TERM
 Internat. J. Math. & Math. Sci. Vol. 22, No. 3 (999 587 595 S 6-72 9922587-2 Electronic Publishing House ON WEAK SOLUTION OF A HYPERBOLIC DIFFERENTIAL INCLUSION WITH NONMONOTONE DISCONTINUOUS NONLINEAR
Internat. J. Math. & Math. Sci. Vol. 22, No. 3 (999 587 595 S 6-72 9922587-2 Electronic Publishing House ON WEAK SOLUTION OF A HYPERBOLIC DIFFERENTIAL INCLUSION WITH NONMONOTONE DISCONTINUOUS NONLINEAR
c 2004 Society for Industrial and Applied Mathematics
 SIAM J. SCI. COMPUT. Vol. 26, No. 2, pp. 359 374 c 24 Society for Industrial and Applied Mathematics A POSTERIORI ERROR ESTIMATION AND GLOBAL ERROR CONTROL FOR ORDINARY DIFFERENTIAL EQUATIONS BY THE ADJOINT
SIAM J. SCI. COMPUT. Vol. 26, No. 2, pp. 359 374 c 24 Society for Industrial and Applied Mathematics A POSTERIORI ERROR ESTIMATION AND GLOBAL ERROR CONTROL FOR ORDINARY DIFFERENTIAL EQUATIONS BY THE ADJOINT
REGULARITY RESULTS FOR HAMILTON-JACOBI EQUATIONS
 REGULARITY RESULTS FOR HAMILTON-JACOBI EQUATIONS Ph.D. Thesis Supervisor Prof. Stefano Bianchini Candidate Daniela Tonon ACADEMIC YEAR 2010/2011 Il presente lavoro costituisce la tesi presentata da Daniela
REGULARITY RESULTS FOR HAMILTON-JACOBI EQUATIONS Ph.D. Thesis Supervisor Prof. Stefano Bianchini Candidate Daniela Tonon ACADEMIC YEAR 2010/2011 Il presente lavoro costituisce la tesi presentata da Daniela
On the Stability of the Best Reply Map for Noncooperative Differential Games
 On the Stability of the Best Reply Map for Noncooperative Differential Games Alberto Bressan and Zipeng Wang Department of Mathematics, Penn State University, University Park, PA, 68, USA DPMMS, University
On the Stability of the Best Reply Map for Noncooperative Differential Games Alberto Bressan and Zipeng Wang Department of Mathematics, Penn State University, University Park, PA, 68, USA DPMMS, University
Calculus of Variations. Final Examination
 Université Paris-Saclay M AMS and Optimization January 18th, 018 Calculus of Variations Final Examination Duration : 3h ; all kind of paper documents (notes, books...) are authorized. The total score of
Université Paris-Saclay M AMS and Optimization January 18th, 018 Calculus of Variations Final Examination Duration : 3h ; all kind of paper documents (notes, books...) are authorized. The total score of
Chapter 2 Convex Analysis
 Chapter 2 Convex Analysis The theory of nonsmooth analysis is based on convex analysis. Thus, we start this chapter by giving basic concepts and results of convexity (for further readings see also [202,
Chapter 2 Convex Analysis The theory of nonsmooth analysis is based on convex analysis. Thus, we start this chapter by giving basic concepts and results of convexity (for further readings see also [202,
Thomas Knispel Leibniz Universität Hannover
 Optimal long term investment under model ambiguity Optimal long term investment under model ambiguity homas Knispel Leibniz Universität Hannover knispel@stochastik.uni-hannover.de AnStAp0 Vienna, July
Optimal long term investment under model ambiguity Optimal long term investment under model ambiguity homas Knispel Leibniz Universität Hannover knispel@stochastik.uni-hannover.de AnStAp0 Vienna, July
A Remark on IVP and TVP Non-Smooth Viscosity Solutions to Hamilton-Jacobi Equations
 2005 American Control Conference June 8-10, 2005. Portland, OR, USA WeB10.3 A Remark on IVP and TVP Non-Smooth Viscosity Solutions to Hamilton-Jacobi Equations Arik Melikyan, Andrei Akhmetzhanov and Naira
2005 American Control Conference June 8-10, 2005. Portland, OR, USA WeB10.3 A Remark on IVP and TVP Non-Smooth Viscosity Solutions to Hamilton-Jacobi Equations Arik Melikyan, Andrei Akhmetzhanov and Naira
The Kuratowski Ryll-Nardzewski Theorem and semismooth Newton methods for Hamilton Jacobi Bellman equations
 The Kuratowski Ryll-Nardzewski Theorem and semismooth Newton methods for Hamilton Jacobi Bellman equations Iain Smears INRIA Paris Linz, November 2016 joint work with Endre Süli, University of Oxford Overview
The Kuratowski Ryll-Nardzewski Theorem and semismooth Newton methods for Hamilton Jacobi Bellman equations Iain Smears INRIA Paris Linz, November 2016 joint work with Endre Süli, University of Oxford Overview
Stochastic differential equations in neuroscience
 Stochastic differential equations in neuroscience Nils Berglund MAPMO, Orléans (CNRS, UMR 6628) http://www.univ-orleans.fr/mapmo/membres/berglund/ Barbara Gentz, Universität Bielefeld Damien Landon, MAPMO-Orléans
Stochastic differential equations in neuroscience Nils Berglund MAPMO, Orléans (CNRS, UMR 6628) http://www.univ-orleans.fr/mapmo/membres/berglund/ Barbara Gentz, Universität Bielefeld Damien Landon, MAPMO-Orléans
Fast Marching Methods for Front Propagation Lecture 1/3
 Outline for Front Propagation Lecture 1/3 M. Falcone Dipartimento di Matematica SAPIENZA, Università di Roma Autumn School Introduction to Numerical Methods for Moving Boundaries ENSTA, Paris, November,
Outline for Front Propagation Lecture 1/3 M. Falcone Dipartimento di Matematica SAPIENZA, Università di Roma Autumn School Introduction to Numerical Methods for Moving Boundaries ENSTA, Paris, November,
Reaction-Diffusion Equations In Narrow Tubes and Wave Front P
 Outlines Reaction-Diffusion Equations In Narrow Tubes and Wave Front Propagation University of Maryland, College Park USA Outline of Part I Outlines Real Life Examples Description of the Problem and Main
Outlines Reaction-Diffusion Equations In Narrow Tubes and Wave Front Propagation University of Maryland, College Park USA Outline of Part I Outlines Real Life Examples Description of the Problem and Main
DUALIZATION OF SUBGRADIENT CONDITIONS FOR OPTIMALITY
 DUALIZATION OF SUBGRADIENT CONDITIONS FOR OPTIMALITY R. T. Rockafellar* Abstract. A basic relationship is derived between generalized subgradients of a given function, possibly nonsmooth and nonconvex,
DUALIZATION OF SUBGRADIENT CONDITIONS FOR OPTIMALITY R. T. Rockafellar* Abstract. A basic relationship is derived between generalized subgradients of a given function, possibly nonsmooth and nonconvex,
Lecture 3: Initial and boundary value problems in 1 dimension
 Lecture 3: Initial and boundary value problems in 1 dimension Gantumur Tsogtgerel Assistant professor of Mathematics Math 319: Introduction to PDEs McGill University, Montréal January 10, 2011 Euler s
Lecture 3: Initial and boundary value problems in 1 dimension Gantumur Tsogtgerel Assistant professor of Mathematics Math 319: Introduction to PDEs McGill University, Montréal January 10, 2011 Euler s
Boundary value problems for the infinity Laplacian. regularity and geometric results
 : regularity and geometric results based on joint works with Graziano Crasta, Roma La Sapienza Calculus of Variations and Its Applications - Lisboa, December 2015 on the occasion of Luísa Mascarenhas 65th
: regularity and geometric results based on joint works with Graziano Crasta, Roma La Sapienza Calculus of Variations and Its Applications - Lisboa, December 2015 on the occasion of Luísa Mascarenhas 65th
A Very General Hamilton Jacobi Theorem
 University of Salerno 9th AIMS ICDSDEA Orlando (Florida) USA, July 1 5, 2012 Introduction: Generalized Hamilton-Jacobi Theorem Hamilton-Jacobi (HJ) Theorem: Consider a Hamiltonian system with Hamiltonian
University of Salerno 9th AIMS ICDSDEA Orlando (Florida) USA, July 1 5, 2012 Introduction: Generalized Hamilton-Jacobi Theorem Hamilton-Jacobi (HJ) Theorem: Consider a Hamiltonian system with Hamiltonian
Flux-limited solutions for quasi-convex Hamilton-Jacobi equations on networks
 Flux-limited solutions for quasi-convex Hamilton-Jacobi equations on networks C. Imbert and R. Monneau June 24, 2014 Abstract We study Hamilton-Jacobi equations on networks in the case where Hamiltonians
Flux-limited solutions for quasi-convex Hamilton-Jacobi equations on networks C. Imbert and R. Monneau June 24, 2014 Abstract We study Hamilton-Jacobi equations on networks in the case where Hamiltonians
Optimal Control. Lecture 18. Hamilton-Jacobi-Bellman Equation, Cont. John T. Wen. March 29, Ref: Bryson & Ho Chapter 4.
 Optimal Control Lecture 18 Hamilton-Jacobi-Bellman Equation, Cont. John T. Wen Ref: Bryson & Ho Chapter 4. March 29, 2004 Outline Hamilton-Jacobi-Bellman (HJB) Equation Iterative solution of HJB Equation
Optimal Control Lecture 18 Hamilton-Jacobi-Bellman Equation, Cont. John T. Wen Ref: Bryson & Ho Chapter 4. March 29, 2004 Outline Hamilton-Jacobi-Bellman (HJB) Equation Iterative solution of HJB Equation
UNIQUENESS OF nth ORDER DIFFERENTIAL SYSTEMS WITH STRONG SINGULARITY
 UNIQUENESS OF nth ORDER DIFFERENTIAL SYSTEMS WITH STRONG SINGULARITY YIFEI PAN AND MEI WANG Abstract. By a Lipschitz type condition, we obtain the uniqueness of solutions for a system of nth order nonlinear
UNIQUENESS OF nth ORDER DIFFERENTIAL SYSTEMS WITH STRONG SINGULARITY YIFEI PAN AND MEI WANG Abstract. By a Lipschitz type condition, we obtain the uniqueness of solutions for a system of nth order nonlinear
A Note On Large Deviation Theory and Beyond
 A Note On Large Deviation Theory and Beyond Jin Feng In this set of notes, we will develop and explain a whole mathematical theory which can be highly summarized through one simple observation ( ) lim
A Note On Large Deviation Theory and Beyond Jin Feng In this set of notes, we will develop and explain a whole mathematical theory which can be highly summarized through one simple observation ( ) lim
LECTURES ON MEAN FIELD GAMES: II. CALCULUS OVER WASSERSTEIN SPACE, CONTROL OF MCKEAN-VLASOV DYNAMICS, AND THE MASTER EQUATION
 LECTURES ON MEAN FIELD GAMES: II. CALCULUS OVER WASSERSTEIN SPACE, CONTROL OF MCKEAN-VLASOV DYNAMICS, AND THE MASTER EQUATION René Carmona Department of Operations Research & Financial Engineering PACM
LECTURES ON MEAN FIELD GAMES: II. CALCULUS OVER WASSERSTEIN SPACE, CONTROL OF MCKEAN-VLASOV DYNAMICS, AND THE MASTER EQUATION René Carmona Department of Operations Research & Financial Engineering PACM
PERIODIC SOLUTIONS OF THE FORCED PENDULUM : CLASSICAL VS RELATIVISTIC
 LE MATEMATICHE Vol. LXV 21) Fasc. II, pp. 97 17 doi: 1.4418/21.65.2.11 PERIODIC SOLUTIONS OF THE FORCED PENDULUM : CLASSICAL VS RELATIVISTIC JEAN MAWHIN The paper surveys and compares some results on the
LE MATEMATICHE Vol. LXV 21) Fasc. II, pp. 97 17 doi: 1.4418/21.65.2.11 PERIODIC SOLUTIONS OF THE FORCED PENDULUM : CLASSICAL VS RELATIVISTIC JEAN MAWHIN The paper surveys and compares some results on the
Exercises: Brunn, Minkowski and convex pie
 Lecture 1 Exercises: Brunn, Minkowski and convex pie Consider the following problem: 1.1 Playing a convex pie Consider the following game with two players - you and me. I am cooking a pie, which should
Lecture 1 Exercises: Brunn, Minkowski and convex pie Consider the following problem: 1.1 Playing a convex pie Consider the following game with two players - you and me. I am cooking a pie, which should
Weak convergence and large deviation theory
 First Prev Next Go To Go Back Full Screen Close Quit 1 Weak convergence and large deviation theory Large deviation principle Convergence in distribution The Bryc-Varadhan theorem Tightness and Prohorov
First Prev Next Go To Go Back Full Screen Close Quit 1 Weak convergence and large deviation theory Large deviation principle Convergence in distribution The Bryc-Varadhan theorem Tightness and Prohorov
On Some Estimates of the Remainder in Taylor s Formula
 Journal of Mathematical Analysis and Applications 263, 246 263 (2) doi:.6/jmaa.2.7622, available online at http://www.idealibrary.com on On Some Estimates of the Remainder in Taylor s Formula G. A. Anastassiou
Journal of Mathematical Analysis and Applications 263, 246 263 (2) doi:.6/jmaa.2.7622, available online at http://www.idealibrary.com on On Some Estimates of the Remainder in Taylor s Formula G. A. Anastassiou
Dynamic and Stochastic Brenier Transport via Hopf-Lax formulae on Was
 Dynamic and Stochastic Brenier Transport via Hopf-Lax formulae on Wasserstein Space With many discussions with Yann Brenier and Wilfrid Gangbo Brenierfest, IHP, January 9-13, 2017 ain points of the
Dynamic and Stochastic Brenier Transport via Hopf-Lax formulae on Wasserstein Space With many discussions with Yann Brenier and Wilfrid Gangbo Brenierfest, IHP, January 9-13, 2017 ain points of the
LECTURE 3: DISCRETE GRADIENT FLOWS
 LECTURE 3: DISCRETE GRADIENT FLOWS Department of Mathematics and Institute for Physical Science and Technology University of Maryland, USA Tutorial: Numerical Methods for FBPs Free Boundary Problems and
LECTURE 3: DISCRETE GRADIENT FLOWS Department of Mathematics and Institute for Physical Science and Technology University of Maryland, USA Tutorial: Numerical Methods for FBPs Free Boundary Problems and
Higher order weak approximations of stochastic differential equations with and without jumps
 Higher order weak approximations of stochastic differential equations with and without jumps Hideyuki TANAKA Graduate School of Science and Engineering, Ritsumeikan University Rough Path Analysis and Related
Higher order weak approximations of stochastic differential equations with and without jumps Hideyuki TANAKA Graduate School of Science and Engineering, Ritsumeikan University Rough Path Analysis and Related