MOMENT OF A FORCE ABOUT A POINT
|
|
|
- Darlene Ray
- 5 years ago
- Views:
Transcription

1 MOMENT OF A FORCE ABOUT A POINT The tendency of a body to rotate about an axis passing through a specific point O when acted upon by a force (sometimes called a torque). 1


2 APPLICATIONS A torque or moment of 12 N m is required to rotate the wheel. Which one of the two grips of the wheel above will require less force to rotate the wheel? 2
3 Couple Moment The couple-moment is known as a free vector, meaning that it can be moved anywhere in space without changing its meaning. 3

4 3.14 Equivalent Couples 135 N 100mm 135 N 135 N 90 N 150mm 90 N 100mm 135 N 100mm 100mm Figure shows three couples which act successively on the same rectangular box. As seen in the preceding section, the only motion a couple can impart to a rigid body is a rotation. Since each of the three couples shown has the same moment M ( same direction and same magnitude M = 135 N. m ), we can expect the three couples to have the same effect on the box. 4

5 MOMENT OF A FORCE ABOUT A POINT Magnitude of a moment Mo = F d N.m Mo = Magnitude of the moment of F around point O d = Perpendicular distance from O to the line of action of F 5
6 6
7 DIRECTION OF MOMENT OF A FORCE Moment produces a rotation. Direction determined by using the Right- Hand Rule. The thumb points along the moment axis and the other fingers are curled following the sense of rotation. Could be clockwise (CW) or anti/counter clockwise (CCW). 7
8 Direction of Moment Choose the convenient sense of rotation for each analysis. 8
9 Calculating moment Scalar Analysis M o = F d M o = F (r sin θ) 9
10 Sample problem 3.1 A 450N vertical force is applied to the end of a lever which is attached to a shaft at O. Determine (a) the moment of the 450N force about O (b) the horizontal force applied at A which creates the same moment about O (c) the smallest force applied at A which creates the same moment about O (d) how far from the shaft a 1100N vertical force must act to create the same moment about O (e) whether any one of the forces obtained in parts b,c and d is equivalent to the original force. 10
 (0.3m) = 135 N.")
11 Solution a) Moment about O The perpendicular distance from O to the line of action of the 450N force is d = (0.6m) cos 60 = 0.3 m The magnitude of the moment about O of the 450N force is Mo = Fd = (450 N) (0.3m) = 135 N.m Since the force tends to rotate the lever clockwise about O, the moment will be represented by a vector Mo perpendicular to the plane of the figure and pointing into the paper.we express this fact by writing. Mo = 135 N.m 11

12 Solution b. Horizontal Force In this case, we have d = (0.6m) sin 60 = 0.52 m Since the moment about O must be 135N.m, we write Mo = Fd 135 N.m = F (0.52 m) F = 260 N F= 260 N 12

13 Solution c. Smallest Force Since Mo = Fd, the smallest value of F occurs when d is maximum. We choose the force perpendicular to OA and note that d = 0.6m, thus Mo = Fd 135 N.m = F (0.6 m) F = 225 N F= 225 N 30 13

14 Solution d N Vertical Force In this case Mo = Fd yields 135 N.m = (1100 N)d d = 0.12 m OB cos 60 = OB = d d cos 60 OB = 0.24 m e. None of the forces considered in parts b,c and d is equivalent to the original 450N force. Although they have the same moment about O, they have different x and y components. In other words, although each forces tends to rotate the shaft in the same manner, each causes the lever to pull on the shaft in a different way. 14
15 Sample problem 3.2 A force of 800 N acts on as bracket as shown. Determine the moment of a force about B. 15
 + 0.")
16 Solution F y = 800 sin A F x = 800 cos 60 B M B = xf y + yf x = 0.2 (800 sin 60 ) (800 cos 60 ) = = Nm
17 Sample problems N A 135N force acts on the end of the 0.9 m lever as shown. Determine the moment of the force about O 17
18 Solution 135N The force is replaced by two components, one component P in the direction of OA and one component Q perpendicular to OA. Since O is on the line of action of P, the moment of P about O is zero and the moment of the 135N force reduces to the moment of Q, which is clockwise and, thus, is represented by a negative scalar. Q = (135N) sin 20 = 46.2 N Mo = -Q (0.9m) = -(46.2N)(0.9m) = -41.6N.m Since the value obtained for the scalar Mo is negative, the moment Mo points into the paper. We write Mo = 41.6 N.m 18
19 EXAMPLE 1 Given: A 400 N force is applied to the frame and = 20. Find: The moment of the force at A. 1) Resolve the force along x and y axes. 2) Determine M A using scalar analysis. 19
20 Solution + F y = -400 sin 20 N + F x = -400 cos 20 N + M A = {(400 cos 20 )(2) + (400 sin 20 )(3)} N m = 1160 N m 20
21 Problems 3.1 A 90-N Force is applied to the control rod AB as shown. Knowing that the length of the rod is 225mm, determine the moment of the force about point B by resolving the force into components along AB and in a direction perpendicular to AB. 21
22 Solution 22
23 Problems 3.2 A 90-N Force is applied to the control rod AB as shown. Knowing that the length of the rod is 225mm, determine the moment of the force about point B by resolving the force into horizontal and vertical components. 23
24 24
25 Solution m 4.8 m A 3N force P is applied to the lever which controls the auger of a snow blower. Determine the moment of P about A when αis equal to 30º. 25


26 Equivalent System Sliding VECTOR MOVING A FORCE ON ITS LINE OF ACTION 26


27 MOVING A FORCE OFF OF ITS LINE OF ACTION Free VECTOR 27


28 Resultant of a Force and Couple System 28
29 3.20 Further Reduction of a Force and Couple System If R and M RP are perpendicular to each other, the force-couple system at P can be further reduced to a single resultant force. Will be the case for system consisting either : (a) concurrent force (b) coplanar force (c) parallel forces (a) concurrent force 29
30 (b) Coplanar force systems (c) Parallel force systems 30

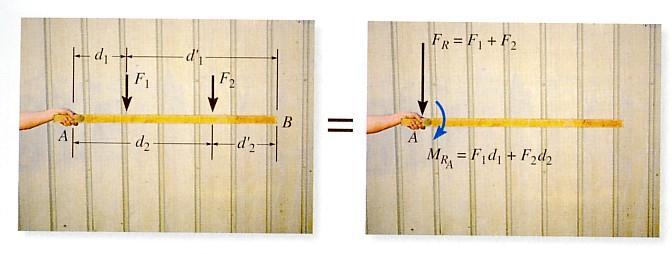
31 The moment of the resultant force about the grip the moment of all the forces about the grip F R d = F 1 d 1 + F 2 d 2 + F 3 d 3 31
32 Sample problems N 600N 100N 250N A 4.80m long beam is subjected to the forces shown. Reduce the given system of forces to a) an equivalent force couple system at A b) single force or resultant 32
33 solution use F R d = F 1 d 1 + F 2 d 2 + F 3 d 3 ; 33
34 solution 150N 600N 100N 250N F1 F2 F3 + F R = = N = 600 N + SM A = F 1 d 1 + F 2 d 2 + F 3 d 3 = - 600(1.6m) + 100(2.8m) 250(4.8) = Nm 34
35 solution F R = 600 [N] A d B F R d = SM A (600) d = 1880 Nm d = 1880/600 = 3.13 m Thus, the single force equivalent to the given system; F R = 600 [N], d = 3.13 [m] 35
36 Solution 0.25 m 0.85 m d D 16.4 N 16.4 N 14 N A B C = 2.1 m D L R For equivalence, S M D F : = - R R = 46.8 N : - (0.25)(16.4) (1.10)(16.4) ( d)(14) = - L (46.8) d = 46.8 L»Eq 1 36
37 Example 3 (cont) (a)for d = m, substitute the value of d in Eq 1, (0.625) = 46.8 L L = m The resultant passes through a point m to the right of D (b) For L = 1.05 m, substitute the value of L in Eq. 1, d = 46.8 (1.05) d = m 37
38 THE END 38
Chapter -4- Force System Resultant
 Ishik University / Sulaimani Civil Engineering Department Chapter -4- Force System Resultant 1 2 1 CHAPTER OBJECTIVES To discuss the concept of the moment of a force and show how to calculate it in two
Ishik University / Sulaimani Civil Engineering Department Chapter -4- Force System Resultant 1 2 1 CHAPTER OBJECTIVES To discuss the concept of the moment of a force and show how to calculate it in two
Force System Resultants. Engineering Mechanics: Statics
 Force System Resultants Engineering Mechanics: Statics Chapter Objectives To discuss the concept of the moment of a force and show how to calculate it in 2-D and 3-D systems. Definition of the moment of
Force System Resultants Engineering Mechanics: Statics Chapter Objectives To discuss the concept of the moment of a force and show how to calculate it in 2-D and 3-D systems. Definition of the moment of
Chapter 4 Force System Resultant Moment of a Force
 Chapter 4 Force System Resultant Moment of a Force MOMENT OF A FORCE SCALAR FORMULATION, CROSS PRODUCT, MOMENT OF A FORCE VECTOR FORMULATION, & PRINCIPLE OF MOMENTS Today s Objectives : Students will be
Chapter 4 Force System Resultant Moment of a Force MOMENT OF A FORCE SCALAR FORMULATION, CROSS PRODUCT, MOMENT OF A FORCE VECTOR FORMULATION, & PRINCIPLE OF MOMENTS Today s Objectives : Students will be
VELAMMAL COLLEGE OF ENGINEERING AND TECHNOLOGY MADURAI DEPARTMRNT OF MECHANICAL ENGINEERING. Subject Code. Mechanics
 VELAMMAL COLLEGE OF ENGINEERING AND TECHNOLOGY MADURAI 625 009 DEPARTMRNT OF MECHANICAL ENGINEERING Year / Sem / Branch I Year / II Sem / CSE Subject Code GE 204 Subject Name Engineering Mechanics Faculty
VELAMMAL COLLEGE OF ENGINEERING AND TECHNOLOGY MADURAI 625 009 DEPARTMRNT OF MECHANICAL ENGINEERING Year / Sem / Branch I Year / II Sem / CSE Subject Code GE 204 Subject Name Engineering Mechanics Faculty
Ishik University / Sulaimani Architecture Department Structure ARCH 214 Chapter -4- Force System Resultant
 Ishik University / Sulaimani Architecture Department 1 Structure ARCH 214 Chapter -4- Force System Resultant 2 1 CHAPTER OBJECTIVES To discuss the concept of the moment of a force and show how to calculate
Ishik University / Sulaimani Architecture Department 1 Structure ARCH 214 Chapter -4- Force System Resultant 2 1 CHAPTER OBJECTIVES To discuss the concept of the moment of a force and show how to calculate
Moment of a force (scalar, vector ) Cross product Principle of Moments Couples Force and Couple Systems Simple Distributed Loading
 Cross product Principle of Moments Couples Force and Couple Systems Simple Distributed Loading") Chapter 4 Moment of a force (scalar, vector ) Cross product Principle of Moments Couples Force and Couple Systems Simple Distributed Loading The moment of a force about a point provides a measure of the
Chapter 4 Moment of a force (scalar, vector ) Cross product Principle of Moments Couples Force and Couple Systems Simple Distributed Loading The moment of a force about a point provides a measure of the
Mengetahui dan memahami maksud dari momen gaya, momen kopel, dan cara. Apa yang dipelajari sekarang? memindah gaya MOMEN DAN KOPEL
 MOMEN DAN KOPEL Apa yang dipelajari sekarang? Mengetahui dan memahami maksud dari momen gaya, momen kopel, dan cara memindah gaya Apa itu momen gaya? The moment of a force about a point provides a measure
MOMEN DAN KOPEL Apa yang dipelajari sekarang? Mengetahui dan memahami maksud dari momen gaya, momen kopel, dan cara memindah gaya Apa itu momen gaya? The moment of a force about a point provides a measure
MOMENT OF A COUPLE. Today s Objectives: Students will be able to. a) define a couple, and, b) determine the moment of a couple.
 define a couple, and, b) determine the moment of a couple.") Today s Objectives: Students will be able to MOMENT OF A COUPLE a) define a couple, and, b) determine the moment of a couple. In-Class activities: Check Homework Reading Quiz Applications Moment of a Couple
Today s Objectives: Students will be able to MOMENT OF A COUPLE a) define a couple, and, b) determine the moment of a couple. In-Class activities: Check Homework Reading Quiz Applications Moment of a Couple
STATICS. Equivalent Systems of Forces. Vector Mechanics for Engineers: Statics VECTOR MECHANICS FOR ENGINEERS: Contents & Objectives.
 3 Rigid CHATER VECTOR ECHANICS FOR ENGINEERS: STATICS Ferdinand. Beer E. Russell Johnston, Jr. Lecture Notes: J. Walt Oler Teas Tech Universit Bodies: Equivalent Sstems of Forces Contents & Objectives
3 Rigid CHATER VECTOR ECHANICS FOR ENGINEERS: STATICS Ferdinand. Beer E. Russell Johnston, Jr. Lecture Notes: J. Walt Oler Teas Tech Universit Bodies: Equivalent Sstems of Forces Contents & Objectives
ENGR-1100 Introduction to Engineering Analysis. Lecture 9
 ENGR-1100 Introduction to Engineering Analysis Lecture 9 MOMENT OF A FORCE (SCALAR FORMULATION), CROSS PRODUCT, MOMENT OF A FORCE (VECTOR FORMULATION), & PRINCIPLE OF MOMENTS Today s Objectives : Students
ENGR-1100 Introduction to Engineering Analysis Lecture 9 MOMENT OF A FORCE (SCALAR FORMULATION), CROSS PRODUCT, MOMENT OF A FORCE (VECTOR FORMULATION), & PRINCIPLE OF MOMENTS Today s Objectives : Students
MOMENT OF A COUPLE. Today s Objectives: Students will be able to a) define a couple, and, b) determine the moment of a couple.
 define a couple, and, b) determine the moment of a couple.") MOMENT OF A COUPLE Today s Objectives: Students will be able to a) define a couple, and, b) determine the moment of a couple. In Class activities: Check Homework Reading Quiz Applications Moment of a Couple
MOMENT OF A COUPLE Today s Objectives: Students will be able to a) define a couple, and, b) determine the moment of a couple. In Class activities: Check Homework Reading Quiz Applications Moment of a Couple
STATICS. Rigid Bodies: Equivalent Systems of Forces VECTOR MECHANICS FOR ENGINEERS: Eighth Edition CHAPTER. Ferdinand P. Beer E. Russell Johnston, Jr.
 Eighth E CHAPTER VECTOR MECHANICS FOR ENGINEERS: STATICS Ferdinand P. Beer E. Russell Johnston, Jr. Lecture Notes: J. Walt Oler Texas Tech University Rigid Bodies: Equivalent Systems of Forces Contents
Eighth E CHAPTER VECTOR MECHANICS FOR ENGINEERS: STATICS Ferdinand P. Beer E. Russell Johnston, Jr. Lecture Notes: J. Walt Oler Texas Tech University Rigid Bodies: Equivalent Systems of Forces Contents
MOMENT OF A FORCE SCALAR FORMULATION, CROSS PRODUCT, MOMENT OF A FORCE VECTOR FORMULATION, & PRINCIPLE OF MOMENTS
 MOMENT OF A FORCE SCALAR FORMULATION, CROSS PRODUCT, MOMENT OF A FORCE VECTOR FORMULATION, & PRINCIPLE OF MOMENTS Today s Objectives : Students will be able to: a) understand and define moment, and, b)
MOMENT OF A FORCE SCALAR FORMULATION, CROSS PRODUCT, MOMENT OF A FORCE VECTOR FORMULATION, & PRINCIPLE OF MOMENTS Today s Objectives : Students will be able to: a) understand and define moment, and, b)
Chap. 3 Rigid Bodies: Equivalent Systems of Forces. External/Internal Forces; Equivalent Forces
 Chap. 3 Rigid Bodies: Equivalent Systems of Forces Treatment of a body as a single particle is not always possible. In general, the size of the body and the specific points of application of the forces
Chap. 3 Rigid Bodies: Equivalent Systems of Forces Treatment of a body as a single particle is not always possible. In general, the size of the body and the specific points of application of the forces
GCE214 Applied Mechanics-Statics. Lecture 04: 27/09/2017
 GCE214 Applied Mechanics-Statics Lecture 04: 27/09/2017 Dr. Ayokunle O. Balogun balogun.ayokunle@lmu.edu.ng Class: Wednesday (3 5 pm) Venue: LT1 Etiquettes and MOP Attendance is a requirement. There may
GCE214 Applied Mechanics-Statics Lecture 04: 27/09/2017 Dr. Ayokunle O. Balogun balogun.ayokunle@lmu.edu.ng Class: Wednesday (3 5 pm) Venue: LT1 Etiquettes and MOP Attendance is a requirement. There may
Engineering Mechanics: Statics
 Engineering Mechanics: Statics Chapter 2: Force Systems Part A: Two Dimensional Force Systems Force Force = an action of one body on another Vector quantity External and Internal forces Mechanics of Rigid
Engineering Mechanics: Statics Chapter 2: Force Systems Part A: Two Dimensional Force Systems Force Force = an action of one body on another Vector quantity External and Internal forces Mechanics of Rigid
ENGINEERING MECHANICS BAA1113. Chapter 4: Force System Resultants (Static)
") ENGINEERING MECHANICS BAA1113 Chapter 4: Force System Resultants (Static) by Pn Rokiah Bt Othman Faculty of Civil Engineering & Earth Resources rokiah@ump.edu.my Chapter Description Aims To explain the
ENGINEERING MECHANICS BAA1113 Chapter 4: Force System Resultants (Static) by Pn Rokiah Bt Othman Faculty of Civil Engineering & Earth Resources rokiah@ump.edu.my Chapter Description Aims To explain the
Chapter 12 Static Equilibrium
 Chapter Static Equilibrium. Analysis Model: Rigid Body in Equilibrium. More on the Center of Gravity. Examples of Rigid Objects in Static Equilibrium CHAPTER : STATIC EQUILIBRIUM AND ELASTICITY.) The Conditions
Chapter Static Equilibrium. Analysis Model: Rigid Body in Equilibrium. More on the Center of Gravity. Examples of Rigid Objects in Static Equilibrium CHAPTER : STATIC EQUILIBRIUM AND ELASTICITY.) The Conditions
Equivalent Systems of Forces
 Equivalent Systems of orces Contents Introduction( 绪论 ) Vector Products of Two Vectors( 矢量积 ) Moment of a orce About a Point( 力对点的矩 ) Moment of a orce About a Given Axis( 力对轴的矩 ) Moment of a Couple( 力偶矩
Equivalent Systems of orces Contents Introduction( 绪论 ) Vector Products of Two Vectors( 矢量积 ) Moment of a orce About a Point( 力对点的矩 ) Moment of a orce About a Given Axis( 力对轴的矩 ) Moment of a Couple( 力偶矩
Engineering Mechanics Statics
 Mechanical Systems Engineering_2016 Engineering Mechanics Statics 6. Moment of a Couple Dr. Rami Zakaria Moment of a Couple We need a moment (or torque) of (12 N m) to rotate the wheel. Notice that one
Mechanical Systems Engineering_2016 Engineering Mechanics Statics 6. Moment of a Couple Dr. Rami Zakaria Moment of a Couple We need a moment (or torque) of (12 N m) to rotate the wheel. Notice that one
Moments and Torques. M = F d
 Moments and Torques When a force is applied to an object, the object reacts in six possible ways. It can elongate, compress, translate (moves left, right, up, down, etc.), bend, twist or rotate. The study
Moments and Torques When a force is applied to an object, the object reacts in six possible ways. It can elongate, compress, translate (moves left, right, up, down, etc.), bend, twist or rotate. The study
SIMPLIFICATION OF FORCE AND COUPLE SYSTEMS & THEIR FURTHER SIMPLIFICATION
 SIMPLIFICATION OF FORCE AND COUPLE SYSTEMS & THEIR FURTHER SIMPLIFICATION Today s Objectives: Students will be able to: a) Determine the effect of moving a force. b) Find an equivalent force-couple system
SIMPLIFICATION OF FORCE AND COUPLE SYSTEMS & THEIR FURTHER SIMPLIFICATION Today s Objectives: Students will be able to: a) Determine the effect of moving a force. b) Find an equivalent force-couple system
SKAA 1213 Engineering Mechanics
 SKAA 1213 Engineering Mechanics TPIC 5 Moment and Couple Lecturers: Rosli Anang Dr. Mohd Yunus Ishak Dr. Tan Cher Siang Moment of a Force Moment of a force about a point/axis the tendency of the force
SKAA 1213 Engineering Mechanics TPIC 5 Moment and Couple Lecturers: Rosli Anang Dr. Mohd Yunus Ishak Dr. Tan Cher Siang Moment of a Force Moment of a force about a point/axis the tendency of the force
ARC241 Structural Analysis I Lecture 5, Sections ST4.5 ST4.10
 Lecture 5, Sections ST4.5 ST4.10 ST4.5) Moment of a Force about a Specified Axis ST4.6) Moment of a Couple ST4.7) Equivalent System ST4.8) Resultant of a Force and a Couple System ST4.9) Further Reduction
Lecture 5, Sections ST4.5 ST4.10 ST4.5) Moment of a Force about a Specified Axis ST4.6) Moment of a Couple ST4.7) Equivalent System ST4.8) Resultant of a Force and a Couple System ST4.9) Further Reduction
2. Force Systems. 2.1 Introduction. 2.2 Force
 2. Force Systems 2.1 Introduction 2.2 Force - A force is an action of one body on another. - A force is an action which tends to cause acceleration of a body (in dynamics). - A force is a vector quantity.
2. Force Systems 2.1 Introduction 2.2 Force - A force is an action of one body on another. - A force is an action which tends to cause acceleration of a body (in dynamics). - A force is a vector quantity.
The Cross Product. In this section, we will learn about: Cross products of vectors and their applications.
 The Cross Product In this section, we will learn about: Cross products of vectors and their applications. THE CROSS PRODUCT The cross product a x b of two vectors a and b, unlike the dot product, is a
The Cross Product In this section, we will learn about: Cross products of vectors and their applications. THE CROSS PRODUCT The cross product a x b of two vectors a and b, unlike the dot product, is a
Course Overview. Statics (Freshman Fall) Dynamics: x(t)= f(f(t)) displacement as a function of time and applied force
 Dynamics: x(t)= f(f(t)) displacement as a function of time and applied force") Course Overview Statics (Freshman Fall) Engineering Mechanics Dynamics (Freshman Spring) Strength of Materials (Sophomore Fall) Mechanism Kinematics and Dynamics (Sophomore Spring ) Aircraft structures
Course Overview Statics (Freshman Fall) Engineering Mechanics Dynamics (Freshman Spring) Strength of Materials (Sophomore Fall) Mechanism Kinematics and Dynamics (Sophomore Spring ) Aircraft structures
1. The horizontal beam represented in Examination Figure 6 carries three loads P 1. and R 2
 Student ID: 52573847 Exam: 286037RR - Engineering Mechanics, Part 2 When you have completed your exam and reviewed your answers, click Submit Exam. Answers will not be recorded until you hit Submit Exam.
Student ID: 52573847 Exam: 286037RR - Engineering Mechanics, Part 2 When you have completed your exam and reviewed your answers, click Submit Exam. Answers will not be recorded until you hit Submit Exam.
Torque. Objectives. Assessment. Assessment. Equations. Physics terms 6/2/14
 Objectives Calculate torque given the lever arm (perpendicular distance) and the force. Calculate torque in newton meters and in pound feet. Interpret positive and negative signs in the context of torque.
Objectives Calculate torque given the lever arm (perpendicular distance) and the force. Calculate torque in newton meters and in pound feet. Interpret positive and negative signs in the context of torque.
Magnetism and Vectors
 Physics 1051 Workshop 5 Magnetism and Vectors Workshop 5 - Contents I. Where do Vector Cross Products Appear? II. Review of What We've Seen Already I. Magnetic Force on a Charge Particle II.Magnetic Force
Physics 1051 Workshop 5 Magnetism and Vectors Workshop 5 - Contents I. Where do Vector Cross Products Appear? II. Review of What We've Seen Already I. Magnetic Force on a Charge Particle II.Magnetic Force
Chapter 8. Centripetal Force and The Law of Gravity
 Chapter 8 Centripetal Force and The Law of Gravity Centripetal Acceleration An object traveling in a circle, even though it moves with a constant speed, will have an acceleration The centripetal acceleration
Chapter 8 Centripetal Force and The Law of Gravity Centripetal Acceleration An object traveling in a circle, even though it moves with a constant speed, will have an acceleration The centripetal acceleration
UNIT - I. Review of the three laws of motion and vector algebra
 UNIT - I Review of the three laws of motion and vector algebra In this course on Engineering Mechanics, we shall be learning about mechanical interaction between bodies. That is we will learn how different
UNIT - I Review of the three laws of motion and vector algebra In this course on Engineering Mechanics, we shall be learning about mechanical interaction between bodies. That is we will learn how different
Rotational Kinematics and Dynamics. UCVTS AIT Physics
 Rotational Kinematics and Dynamics UCVTS AIT Physics Angular Position Axis of rotation is the center of the disc Choose a fixed reference line Point P is at a fixed distance r from the origin Angular Position,
Rotational Kinematics and Dynamics UCVTS AIT Physics Angular Position Axis of rotation is the center of the disc Choose a fixed reference line Point P is at a fixed distance r from the origin Angular Position,
SOLUTION 8 7. To hold lever: a+ M O = 0; F B (0.15) - 5 = 0; F B = N. Require = N N B = N 0.3. Lever,
 - 5 = 0; F B = N. Require = N N B = N 0.3. Lever,") 8 3. If the coefficient of static friction at is m s = 0.4 and the collar at is smooth so it only exerts a horizontal force on the pipe, determine the minimum distance x so that the bracket can support
8 3. If the coefficient of static friction at is m s = 0.4 and the collar at is smooth so it only exerts a horizontal force on the pipe, determine the minimum distance x so that the bracket can support
APPLIED MECHANICS I Resultant of Concurrent Forces Consider a body acted upon by co-planar forces as shown in Fig 1.1(a).
.") PPLIED MECHNICS I 1. Introduction to Mechanics Mechanics is a science that describes and predicts the conditions of rest or motion of bodies under the action of forces. It is divided into three parts 1.
PPLIED MECHNICS I 1. Introduction to Mechanics Mechanics is a science that describes and predicts the conditions of rest or motion of bodies under the action of forces. It is divided into three parts 1.
STATICS. Equivalent Systems of Forces. Vector Mechanics for Engineers: Statics VECTOR MECHANICS FOR ENGINEERS: Contents 9/3/2015.
 3 Rigid CHPTER VECTR ECHNICS R ENGINEERS: STTICS erdinand P. eer E. Russell Johnston, Jr. Lecture Notes: J. Walt ler Teas Tech Universit odies: Equivalent Sstems of orces Contents Introduction Eternal
3 Rigid CHPTER VECTR ECHNICS R ENGINEERS: STTICS erdinand P. eer E. Russell Johnston, Jr. Lecture Notes: J. Walt ler Teas Tech Universit odies: Equivalent Sstems of orces Contents Introduction Eternal
Introduction /Basic concept
 GCHAPTER 1 Introduction /Basic concept MECHANICS: Mechanics can be defined as the branch of physics concerned with the state of rest or motion of bodies that subjected to the action of forces. OR It may
GCHAPTER 1 Introduction /Basic concept MECHANICS: Mechanics can be defined as the branch of physics concerned with the state of rest or motion of bodies that subjected to the action of forces. OR It may
Example 25: Determine the moment M AB produced by force F in Figure which tends to rotate the rod about the AB axis.
 Eample 25: Determine the moment M AB produced by force F in Figure which tends to rotate the rod about the AB ais. Solution: Because that F is parallel to the z-ais so it has no moment about z-ais. Its
Eample 25: Determine the moment M AB produced by force F in Figure which tends to rotate the rod about the AB ais. Solution: Because that F is parallel to the z-ais so it has no moment about z-ais. Its
Mechanics: Scalars and Vectors
 Mechanics: Scalars and Vectors Scalar Onl magnitude is associated with it Vector e.g., time, volume, densit, speed, energ, mass etc. Possess direction as well as magnitude Parallelogram law of addition
Mechanics: Scalars and Vectors Scalar Onl magnitude is associated with it Vector e.g., time, volume, densit, speed, energ, mass etc. Possess direction as well as magnitude Parallelogram law of addition
Chapter 12: Rotation of Rigid Bodies. Center of Mass Moment of Inertia Torque Angular Momentum Rolling Statics
 Chapter 12: Rotation of Rigid Bodies Center of Mass Moment of Inertia Torque Angular Momentum Rolling Statics Translational vs Rotational 2 / / 1/ 2 m x v dx dt a dv dt F ma p mv KE mv Work Fd P Fv 2 /
Chapter 12: Rotation of Rigid Bodies Center of Mass Moment of Inertia Torque Angular Momentum Rolling Statics Translational vs Rotational 2 / / 1/ 2 m x v dx dt a dv dt F ma p mv KE mv Work Fd P Fv 2 /
Chapter 8 Rotational Equilibrium and Rotational Dynamics Force vs. Torque Forces cause accelerations Torques cause angular accelerations Force and
 Chapter 8 Rotational Equilibrium and Rotational Dynamics Force vs. Torque Forces cause accelerations Torques cause angular accelerations Force and torque are related Torque The door is free to rotate about
Chapter 8 Rotational Equilibrium and Rotational Dynamics Force vs. Torque Forces cause accelerations Torques cause angular accelerations Force and torque are related Torque The door is free to rotate about
MECHANICS. Prepared by Engr. John Paul Timola
 MECHANICS Prepared by Engr. John Paul Timola MECHANICS a branch of the physical sciences that is concerned with the state of rest or motion of bodies that are subjected to the action of forces. subdivided
MECHANICS Prepared by Engr. John Paul Timola MECHANICS a branch of the physical sciences that is concerned with the state of rest or motion of bodies that are subjected to the action of forces. subdivided
Rotational Motion and Torque
 Rotational Motion and Torque Introduction to Angular Quantities Sections 8- to 8-2 Introduction Rotational motion deals with spinning objects, or objects rotating around some point. Rotational motion is
Rotational Motion and Torque Introduction to Angular Quantities Sections 8- to 8-2 Introduction Rotational motion deals with spinning objects, or objects rotating around some point. Rotational motion is
Chapter 8. Rotational Equilibrium and Rotational Dynamics. 1. Torque. 2. Torque and Equilibrium. 3. Center of Mass and Center of Gravity
 Chapter 8 Rotational Equilibrium and Rotational Dynamics 1. Torque 2. Torque and Equilibrium 3. Center of Mass and Center of Gravity 4. Torque and angular acceleration 5. Rotational Kinetic energy 6. Angular
Chapter 8 Rotational Equilibrium and Rotational Dynamics 1. Torque 2. Torque and Equilibrium 3. Center of Mass and Center of Gravity 4. Torque and angular acceleration 5. Rotational Kinetic energy 6. Angular
The University of Melbourne Engineering Mechanics
 The University of Melbourne 436-291 Engineering Mechanics Tutorial Eleven Instantaneous Centre and General Motion Part A (Introductory) 1. (Problem 5/93 from Meriam and Kraige - Dynamics) For the instant
The University of Melbourne 436-291 Engineering Mechanics Tutorial Eleven Instantaneous Centre and General Motion Part A (Introductory) 1. (Problem 5/93 from Meriam and Kraige - Dynamics) For the instant
10/23/2015. Chapter 7. Velocity in Mechanisms. (Relative Velocity Method) Mohammad Suliman Abuhaiba, Ph.D., PE
 Mohammad Suliman Abuhaiba, Ph.D., PE") Chapter 7 Velocity in Mechanisms (Relative Velocity Method) 1 2 7.2. Relative Velocity of Two Bodies Moving in Straight Lines 3 7.3. Motion of a Link Velocity of any point on a link wrt another point on
Chapter 7 Velocity in Mechanisms (Relative Velocity Method) 1 2 7.2. Relative Velocity of Two Bodies Moving in Straight Lines 3 7.3. Motion of a Link Velocity of any point on a link wrt another point on
Created by T. Madas VECTOR MOMENTS. Created by T. Madas
 VECTOR MOMENTS Question 1 (**) The vectors i, j and k are unit vectors mutually perpendicular to one another. Relative to a fixed origin O, a light rigid rod has its ends located at the points 0, 7,4 B
VECTOR MOMENTS Question 1 (**) The vectors i, j and k are unit vectors mutually perpendicular to one another. Relative to a fixed origin O, a light rigid rod has its ends located at the points 0, 7,4 B
Engineering Mechanics Prof. U. S. Dixit Department of Mechanical Engineering Indian Institute of Technology, Guwahati
 Engineering Mechanics Prof. U. S. Dixit Department of Mechanical Engineering Indian Institute of Technology, Guwahati Module No. - 01 Basics of Statics Lecture No. - 01 Fundamental of Engineering Mechanics
Engineering Mechanics Prof. U. S. Dixit Department of Mechanical Engineering Indian Institute of Technology, Guwahati Module No. - 01 Basics of Statics Lecture No. - 01 Fundamental of Engineering Mechanics
TUTORIAL SHEET 1. magnitude of P and the values of ø and θ. Ans: ø =74 0 and θ= 53 0
 TUTORIAL SHEET 1 1. The rectangular platform is hinged at A and B and supported by a cable which passes over a frictionless hook at E. Knowing that the tension in the cable is 1349N, determine the moment
TUTORIAL SHEET 1 1. The rectangular platform is hinged at A and B and supported by a cable which passes over a frictionless hook at E. Knowing that the tension in the cable is 1349N, determine the moment
Torque. Physics 6A. Prepared by Vince Zaccone For Campus Learning Assistance Services at UCSB
 Physics 6A Torque is what causes angular acceleration (just like a force causes linear acceleration) Torque is what causes angular acceleration (just like a force causes linear acceleration) For a torque
Physics 6A Torque is what causes angular acceleration (just like a force causes linear acceleration) Torque is what causes angular acceleration (just like a force causes linear acceleration) For a torque
Rotation. Kinematics Rigid Bodies Kinetic Energy. Torque Rolling. featuring moments of Inertia
 Rotation Kinematics Rigid Bodies Kinetic Energy featuring moments of Inertia Torque Rolling Angular Motion We think about rotation in the same basic way we do about linear motion How far does it go? How
Rotation Kinematics Rigid Bodies Kinetic Energy featuring moments of Inertia Torque Rolling Angular Motion We think about rotation in the same basic way we do about linear motion How far does it go? How
SOLUTION 4 1. If A, B, and D are given vectors, prove the distributive law for the vector cross product, i.e., A : (B + D) = (A : B) + (A : D).
 = (A : B) + (A : D).") 4 1. If A, B, and D are given vectors, prove the distributive law for the vector cross product, i.e., A : (B + D) = (A : B) + (A : D). Consider the three vectors; with A vertical. Note obd is perpendicular
4 1. If A, B, and D are given vectors, prove the distributive law for the vector cross product, i.e., A : (B + D) = (A : B) + (A : D). Consider the three vectors; with A vertical. Note obd is perpendicular
LOVELY PROFESSIONAL UNIVERSITY BASIC ENGINEERING MECHANICS MCQ TUTORIAL SHEET OF MEC Concurrent forces are those forces whose lines of action
 LOVELY PROFESSIONAL UNIVERSITY BASIC ENGINEERING MECHANICS MCQ TUTORIAL SHEET OF MEC 107 1. Concurrent forces are those forces whose lines of action 1. Meet on the same plane 2. Meet at one point 3. Lie
LOVELY PROFESSIONAL UNIVERSITY BASIC ENGINEERING MECHANICS MCQ TUTORIAL SHEET OF MEC 107 1. Concurrent forces are those forces whose lines of action 1. Meet on the same plane 2. Meet at one point 3. Lie
two forces and moments Structural Math Physics for Structures Structural Math
 RHITETURL STRUTURES: ORM, EHVIOR, ND DESIGN DR. NNE NIHOLS SUMMER 05 lecture two forces and moments orces & Moments rchitectural Structures 009abn Structural Math quantify environmental loads how big is
RHITETURL STRUTURES: ORM, EHVIOR, ND DESIGN DR. NNE NIHOLS SUMMER 05 lecture two forces and moments orces & Moments rchitectural Structures 009abn Structural Math quantify environmental loads how big is
EDEXCEL NATIONAL CERTIFICATE/DIPLOMA ADVANCED MECHANICAL PRINCIPLES AND APPLICATIONS UNIT 18 NQF LEVEL 3
 EDEXCEL NATIONAL CERTIFICATE/DIPLOMA ADVANCED MECHANICAL PRINCIPLES AND APPLICATIONS UNIT 18 NQF LEVEL 3 OUTCOME 3 BE ABLE TO DETERMINE RELATIVE AND RESULTANT VELOCITY IN ENGINEERING SYSTEMS Resultant
EDEXCEL NATIONAL CERTIFICATE/DIPLOMA ADVANCED MECHANICAL PRINCIPLES AND APPLICATIONS UNIT 18 NQF LEVEL 3 OUTCOME 3 BE ABLE TO DETERMINE RELATIVE AND RESULTANT VELOCITY IN ENGINEERING SYSTEMS Resultant
Chapter Objectives. Copyright 2011 Pearson Education South Asia Pte Ltd
 Chapter Objectives To show how to add forces and resolve them into components using the Parallelogram Law. To express force and position in Cartesian vector form and explain how to determine the vector
Chapter Objectives To show how to add forces and resolve them into components using the Parallelogram Law. To express force and position in Cartesian vector form and explain how to determine the vector
LOVELY PROFESSIONAL UNIVERSITY BASIC ENGINEERING MECHANICS MCQ TUTORIAL SHEET OF MEC Concurrent forces are those forces whose lines of action
 LOVELY PROFESSIONAL UNIVERSITY BASIC ENGINEERING MECHANICS MCQ TUTORIAL SHEET OF MEC 107 1. Concurrent forces are those forces whose lines of action 1. Meet on the same plane 2. Meet at one point 3. Lie
LOVELY PROFESSIONAL UNIVERSITY BASIC ENGINEERING MECHANICS MCQ TUTORIAL SHEET OF MEC 107 1. Concurrent forces are those forces whose lines of action 1. Meet on the same plane 2. Meet at one point 3. Lie
BE Semester- I ( ) Question Bank (MECHANICS OF SOLIDS)
 Question Bank (MECHANICS OF SOLIDS)") BE Semester- I ( ) Question Bank (MECHANICS OF SOLIDS) All questions carry equal marks(10 marks) Q.1 (a) Write the SI units of following quantities and also mention whether it is scalar or vector: (i)
BE Semester- I ( ) Question Bank (MECHANICS OF SOLIDS) All questions carry equal marks(10 marks) Q.1 (a) Write the SI units of following quantities and also mention whether it is scalar or vector: (i)
Force Couple Systems = Reduction of a Force to an Equivalent Force and Moment (Moving a Force to Another Point) acting on a body has two effects:
 acting on a body has two effects:") ESULTANTS orce Couple Systems = eduction of a orce to an Equivalent orce and Moment (Moving a orce to Another Point) The force acting on a body has two effects: the first one is the tendency to push or
ESULTANTS orce Couple Systems = eduction of a orce to an Equivalent orce and Moment (Moving a orce to Another Point) The force acting on a body has two effects: the first one is the tendency to push or
Engineering Mechanics: Statics in SI Units, 12e
 Engineering Mechanics: Statics in SI Units, 12e 5 Equilibrium of a Rigid Body Chapter Objectives Develop the equations of equilibrium for a rigid body Concept of the free-body diagram for a rigid body
Engineering Mechanics: Statics in SI Units, 12e 5 Equilibrium of a Rigid Body Chapter Objectives Develop the equations of equilibrium for a rigid body Concept of the free-body diagram for a rigid body
CIV100: Mechanics. Lecture Notes. Module 1: Force & Moment in 2D. You Know What to Do!
 CIV100: Mechanics Lecture Notes Module 1: Force & Moment in 2D By: Tamer El-Diraby, PhD, PEng. Associate Prof. & Director, I2C University of Toronto Acknowledgment: Hesham Osman, PhD and Jinyue Zhang,
CIV100: Mechanics Lecture Notes Module 1: Force & Moment in 2D By: Tamer El-Diraby, PhD, PEng. Associate Prof. & Director, I2C University of Toronto Acknowledgment: Hesham Osman, PhD and Jinyue Zhang,
five moments ELEMENTS OF ARCHITECTURAL STRUCTURES: FORM, BEHAVIOR, AND DESIGN DR. ANNE NICHOLS SPRING 2014 lecture ARCH 614
 ELEMENTS OF ARCHITECTURAL STRUCTURES: FORM, BEHAVIOR, AND DESIGN DR. ANNE NICHOLS SPRING 2014 lecture five moments Moments 1 Moments forces have the tendency to make a body rotate about an axis http://www.physics.umd.edu
ELEMENTS OF ARCHITECTURAL STRUCTURES: FORM, BEHAVIOR, AND DESIGN DR. ANNE NICHOLS SPRING 2014 lecture five moments Moments 1 Moments forces have the tendency to make a body rotate about an axis http://www.physics.umd.edu
STATICS. Bodies. Vector Mechanics for Engineers: Statics VECTOR MECHANICS FOR ENGINEERS: Design of a support
 4 Equilibrium CHAPTER VECTOR MECHANICS FOR ENGINEERS: STATICS Ferdinand P. Beer E. Russell Johnston, Jr. Lecture Notes: J. Walt Oler Texas Tech University of Rigid Bodies 2010 The McGraw-Hill Companies,
4 Equilibrium CHAPTER VECTOR MECHANICS FOR ENGINEERS: STATICS Ferdinand P. Beer E. Russell Johnston, Jr. Lecture Notes: J. Walt Oler Texas Tech University of Rigid Bodies 2010 The McGraw-Hill Companies,
5. Plane Kinetics of Rigid Bodies
 5. Plane Kinetics of Rigid Bodies 5.1 Mass moments of inertia 5.2 General equations of motion 5.3 Translation 5.4 Fixed axis rotation 5.5 General plane motion 5.6 Work and energy relations 5.7 Impulse
5. Plane Kinetics of Rigid Bodies 5.1 Mass moments of inertia 5.2 General equations of motion 5.3 Translation 5.4 Fixed axis rotation 5.5 General plane motion 5.6 Work and energy relations 5.7 Impulse
3D Force Couple System and Resultant. Q.No.1: Replace the force system by an equivalent force and couple moment at point A.
 3D Force Couple System and Resultant Q.No.1: Replace the force system by an equivalent force and couple moment at point A. Q.No.2: Handle forces F1 and F2 are applied to the electric drill. Replace this
3D Force Couple System and Resultant Q.No.1: Replace the force system by an equivalent force and couple moment at point A. Q.No.2: Handle forces F1 and F2 are applied to the electric drill. Replace this
Physics 8 Wednesday, October 25, 2017
 Physics 8 Wednesday, October 25, 2017 HW07 due Friday. It is mainly rotation, plus a couple of basic torque questions. And there are only 8 problems this week. For today, you read (in Perusall) Onouye/Kane
Physics 8 Wednesday, October 25, 2017 HW07 due Friday. It is mainly rotation, plus a couple of basic torque questions. And there are only 8 problems this week. For today, you read (in Perusall) Onouye/Kane
Chapter 12: Rotation of Rigid Bodies. Center of Mass Moment of Inertia Torque Angular Momentum Rolling Statics
 Chapter 1: Rotation of Rigid Bodies Center of Mass Moment of Inertia Torque Angular Momentum Rolling Statics Translational vs Rotational / / 1/ m x v dx dt a dv dt F ma p mv KE mv Work Fd P Fv / / 1/ I
Chapter 1: Rotation of Rigid Bodies Center of Mass Moment of Inertia Torque Angular Momentum Rolling Statics Translational vs Rotational / / 1/ m x v dx dt a dv dt F ma p mv KE mv Work Fd P Fv / / 1/ I
Appendix. Vectors, Systems of Equations
 ppendix Vectors, Systems of Equations Vectors, Systems of Equations.1.1 Vectors Scalar physical quantities (e.g., time, mass, density) possess only magnitude. Vectors are physical quantities (e.g., force,
ppendix Vectors, Systems of Equations Vectors, Systems of Equations.1.1 Vectors Scalar physical quantities (e.g., time, mass, density) possess only magnitude. Vectors are physical quantities (e.g., force,
Chapter Objectives. Copyright 2011 Pearson Education South Asia Pte Ltd
 Chapter Objectives To develop the equations of equilibrium for a rigid body. To introduce the concept of the free-body diagram for a rigid body. To show how to solve rigid-body equilibrium problems using
Chapter Objectives To develop the equations of equilibrium for a rigid body. To introduce the concept of the free-body diagram for a rigid body. To show how to solve rigid-body equilibrium problems using
EQUATIONS OF EQUILIBRIUM & TWO-AND THREE-FORCE MEMEBERS
 EQUATIONS OF EQUILIBRIUM & TWO-AND THREE-FORCE MEMEBERS Today s Objectives: Students will be able to: a) Apply equations of equilibrium to solve for unknowns, and, b) Recognize two-force members. READING
EQUATIONS OF EQUILIBRIUM & TWO-AND THREE-FORCE MEMEBERS Today s Objectives: Students will be able to: a) Apply equations of equilibrium to solve for unknowns, and, b) Recognize two-force members. READING
Cross Product Angular Momentum
 Lecture 21 Chapter 12 Physics I Cross Product Angular Momentum Course website: http://faculty.uml.edu/andriy_danylov/teaching/physicsi IN THIS CHAPTER, you will continue discussing rotational dynamics
Lecture 21 Chapter 12 Physics I Cross Product Angular Momentum Course website: http://faculty.uml.edu/andriy_danylov/teaching/physicsi IN THIS CHAPTER, you will continue discussing rotational dynamics
MOMENT ABOUT AN AXIS
 Today s Objectives: MOMENT ABOUT AN AXIS Students will be able to determine the moment of a force about an axis using a) scalar analysis, and b) vector analysis. In-Class Activities: Applications Scalar
Today s Objectives: MOMENT ABOUT AN AXIS Students will be able to determine the moment of a force about an axis using a) scalar analysis, and b) vector analysis. In-Class Activities: Applications Scalar
Physics 8 Wednesday, October 30, 2013
 Physics 8 Wednesday, October 30, 2013 HW9 (due Friday) is 7 conceptual + 8 calculation problems. Of the 8 calculation problems, 4 or 5 are from Chapter 11, and 3 or 4 are from Chapter 12. 7pm HW sessions:
Physics 8 Wednesday, October 30, 2013 HW9 (due Friday) is 7 conceptual + 8 calculation problems. Of the 8 calculation problems, 4 or 5 are from Chapter 11, and 3 or 4 are from Chapter 12. 7pm HW sessions:
Engineering Mechanics: Statics in SI Units, 12e Force Vectors
 Engineering Mechanics: Statics in SI Units, 1e orce Vectors 1 Chapter Objectives Parallelogram Law Cartesian vector form Dot product and angle between vectors Chapter Outline 1. Scalars and Vectors. Vector
Engineering Mechanics: Statics in SI Units, 1e orce Vectors 1 Chapter Objectives Parallelogram Law Cartesian vector form Dot product and angle between vectors Chapter Outline 1. Scalars and Vectors. Vector
Equilibrium of a Rigid Body. Engineering Mechanics: Statics
 Equilibrium of a Rigid Body Engineering Mechanics: Statics Chapter Objectives Revising equations of equilibrium of a rigid body in 2D and 3D for the general case. To introduce the concept of the free-body
Equilibrium of a Rigid Body Engineering Mechanics: Statics Chapter Objectives Revising equations of equilibrium of a rigid body in 2D and 3D for the general case. To introduce the concept of the free-body
Rotational N.2 nd Law
 Lecture 0 Chapter 1 Physics I Rotational N. nd Law Torque Course website: http://faculty.uml.edu/andriy_danylov/teaching/physicsi IN THIS CHAPTER, you will continue discussing rotational dynamics Today
Lecture 0 Chapter 1 Physics I Rotational N. nd Law Torque Course website: http://faculty.uml.edu/andriy_danylov/teaching/physicsi IN THIS CHAPTER, you will continue discussing rotational dynamics Today
Rotation. I. Kinematics - Angular analogs
 Rotation I. Kinematics - Angular analogs II. III. IV. Dynamics - Torque and Rotational Inertia Work and Energy Angular Momentum - Bodies and particles V. Elliptical Orbits The student will be able to:
Rotation I. Kinematics - Angular analogs II. III. IV. Dynamics - Torque and Rotational Inertia Work and Energy Angular Momentum - Bodies and particles V. Elliptical Orbits The student will be able to:
Rotational Kinetic Energy
 Lecture 17, Chapter 10: Rotational Energy and Angular Momentum 1 Rotational Kinetic Energy Consider a rigid body rotating with an angular velocity ω about an axis. Clearly every point in the rigid body
Lecture 17, Chapter 10: Rotational Energy and Angular Momentum 1 Rotational Kinetic Energy Consider a rigid body rotating with an angular velocity ω about an axis. Clearly every point in the rigid body
Rotation. Rotational Variables
 Rotation Rigid Bodies Rotation variables Constant angular acceleration Rotational KE Rotational Inertia Rotational Variables Rotation of a rigid body About a fixed rotation axis. Rigid Body an object that
Rotation Rigid Bodies Rotation variables Constant angular acceleration Rotational KE Rotational Inertia Rotational Variables Rotation of a rigid body About a fixed rotation axis. Rigid Body an object that
Unit 1. (a) tan α = (b) tan α = (c) tan α = (d) tan α =
 tan α = (b) tan α = (c) tan α = (d) tan α =") Unit 1 1. The subjects Engineering Mechanics deals with (a) Static (b) kinematics (c) Kinetics (d) All of the above 2. If the resultant of two forces P and Q is acting at an angle α with P, then (a) tan
Unit 1 1. The subjects Engineering Mechanics deals with (a) Static (b) kinematics (c) Kinetics (d) All of the above 2. If the resultant of two forces P and Q is acting at an angle α with P, then (a) tan
Unit 21 Couples and Resultants with Couples
 Unit 21 Couples and Resultants with Couples Page 21-1 Couples A couple is defined as (21-5) Moment of Couple The coplanar forces F 1 and F 2 make up a couple and the coordinate axes are chosen so that
Unit 21 Couples and Resultants with Couples Page 21-1 Couples A couple is defined as (21-5) Moment of Couple The coplanar forces F 1 and F 2 make up a couple and the coordinate axes are chosen so that
Figure 17.1 The center of mass of a thrown rigid rod follows a parabolic trajectory while the rod rotates about the center of mass.
 17.1 Introduction A body is called a rigid body if the distance between any two points in the body does not change in time. Rigid bodies, unlike point masses, can have forces applied at different points
17.1 Introduction A body is called a rigid body if the distance between any two points in the body does not change in time. Rigid bodies, unlike point masses, can have forces applied at different points
Structures Activity 2 Levers
 Structures Activity 2 Levers Object: The objects of this activity are to explore the concepts of torque and rotational equilibrium, study the three classes of lever, and apply the concepts of torque and
Structures Activity 2 Levers Object: The objects of this activity are to explore the concepts of torque and rotational equilibrium, study the three classes of lever, and apply the concepts of torque and
Please Visit us at:
 IMPORTANT QUESTIONS WITH ANSWERS Q # 1. Differentiate among scalars and vectors. Scalars Vectors (i) The physical quantities that are completely (i) The physical quantities that are completely described
IMPORTANT QUESTIONS WITH ANSWERS Q # 1. Differentiate among scalars and vectors. Scalars Vectors (i) The physical quantities that are completely (i) The physical quantities that are completely described
Chapter 8. Rotational Equilibrium and Rotational Dynamics
 Chapter 8 Rotational Equilibrium and Rotational Dynamics Force vs. Torque Forces cause accelerations Torques cause angular accelerations Force and torque are related Torque The door is free to rotate about
Chapter 8 Rotational Equilibrium and Rotational Dynamics Force vs. Torque Forces cause accelerations Torques cause angular accelerations Force and torque are related Torque The door is free to rotate about
Static Equilibrium; Torque
 Static Equilibrium; Torque The Conditions for Equilibrium An object with forces acting on it, but that is not moving, is said to be in equilibrium. The first condition for equilibrium is that the net force
Static Equilibrium; Torque The Conditions for Equilibrium An object with forces acting on it, but that is not moving, is said to be in equilibrium. The first condition for equilibrium is that the net force
Physics 101 Lecture 11 Torque
 Physics 101 Lecture 11 Torque Dr. Ali ÖVGÜN EMU Physics Department www.aovgun.com Force vs. Torque q Forces cause accelerations q What cause angular accelerations? q A door is free to rotate about an axis
Physics 101 Lecture 11 Torque Dr. Ali ÖVGÜN EMU Physics Department www.aovgun.com Force vs. Torque q Forces cause accelerations q What cause angular accelerations? q A door is free to rotate about an axis
However, the friction forces are limited in magnitude and will not prevent motion if sufficiently large forces are applied.
 FRICTION 1 Introduction In preceding chapters, it was assumed that surfaces in contact were either frictionless (surfaces could move freely with respect to each other) or rough (tangential forces prevent
FRICTION 1 Introduction In preceding chapters, it was assumed that surfaces in contact were either frictionless (surfaces could move freely with respect to each other) or rough (tangential forces prevent
Chapter 2: Force Vectors
 Chapter 2: Force Vectors Chapter Objectives To show how to add forces and resolve them into components using the Parallelogram Law. To express force and position in Cartesian vector form and explain how
Chapter 2: Force Vectors Chapter Objectives To show how to add forces and resolve them into components using the Parallelogram Law. To express force and position in Cartesian vector form and explain how
Chapter 10 Practice Test
 Chapter 10 Practice Test 1. At t = 0, a wheel rotating about a fixed axis at a constant angular acceleration of 0.40 rad/s 2 has an angular velocity of 1.5 rad/s and an angular position of 2.3 rad. What
Chapter 10 Practice Test 1. At t = 0, a wheel rotating about a fixed axis at a constant angular acceleration of 0.40 rad/s 2 has an angular velocity of 1.5 rad/s and an angular position of 2.3 rad. What
The Moment of a Force
 The Moment of a Force When we consider cases where forces act on a body of non-zero size (i.e. not a particle), the main new aspect that we need to take account of is that such a body can rotate, as well
The Moment of a Force When we consider cases where forces act on a body of non-zero size (i.e. not a particle), the main new aspect that we need to take account of is that such a body can rotate, as well
Check out course website for: Link to practice problems & old/sample exams Link to HW website Lecture notes
 Common Exam 1 Time: 4-5:25pm on 9/26, Monday (arrive 15 min before) Room: TBA Covers Week 1 and 2 in the syllabus All problems will be open-ended, no multiple-choice Check out course website http://web.njit.edu/~kenahn
Common Exam 1 Time: 4-5:25pm on 9/26, Monday (arrive 15 min before) Room: TBA Covers Week 1 and 2 in the syllabus All problems will be open-ended, no multiple-choice Check out course website http://web.njit.edu/~kenahn
Ishik University / Sulaimani Civil Engineering Department. Chapter -2-
 Ishik University / Sulaimani Civil Engineering Department Chapter -- 1 orce Vectors Contents : 1. Scalars and Vectors. Vector Operations 3. Vector Addition of orces 4. Addition of a System of Coplanar
Ishik University / Sulaimani Civil Engineering Department Chapter -- 1 orce Vectors Contents : 1. Scalars and Vectors. Vector Operations 3. Vector Addition of orces 4. Addition of a System of Coplanar
Section 13.4 The Cross Product
 Section 13.4 The Cross Product Multiplying Vectors 2 In this section we consider the more technical multiplication which can be defined on vectors in 3-space (but not vectors in 2-space). 1. Basic Definitions
Section 13.4 The Cross Product Multiplying Vectors 2 In this section we consider the more technical multiplication which can be defined on vectors in 3-space (but not vectors in 2-space). 1. Basic Definitions
3.1 CONDITIONS FOR RIGID-BODY EQUILIBRIUM
 3.1 CONDITIONS FOR RIGID-BODY EQUILIBRIUM Consider rigid body fixed in the x, y and z reference and is either at rest or moves with reference at constant velocity Two types of forces that act on it, the
3.1 CONDITIONS FOR RIGID-BODY EQUILIBRIUM Consider rigid body fixed in the x, y and z reference and is either at rest or moves with reference at constant velocity Two types of forces that act on it, the
TEST-1 MEACHNICAL (MEACHNICS)
") 1 TEST-1 MEACHNICAL (MEACHNICS) Objective Type Questions:- Q.1 The term force may be defined as an agent t which produces or tends to produce, destroys or tends to destroy motion. a) Agree b) disagree
1 TEST-1 MEACHNICAL (MEACHNICS) Objective Type Questions:- Q.1 The term force may be defined as an agent t which produces or tends to produce, destroys or tends to destroy motion. a) Agree b) disagree
SOLUTION 8 1. a+ M B = 0; N A = 0. N A = kn = 16.5 kn. Ans. + c F y = 0; N B = 0
 8 1. The mine car and its contents have a total mass of 6 Mg and a center of gravity at G. If the coefficient of static friction between the wheels and the tracks is m s = 0.4 when the wheels are locked,
8 1. The mine car and its contents have a total mass of 6 Mg and a center of gravity at G. If the coefficient of static friction between the wheels and the tracks is m s = 0.4 when the wheels are locked,
Section 2: Static Equilibrium II- Balancing Torques
 Section 2: Static Equilibrium II- Balancing Torques Last Section: If (ie. Forces up = Forces down and Forces left = Forces right), then the object will have no translatory motion. In other words, the object
Section 2: Static Equilibrium II- Balancing Torques Last Section: If (ie. Forces up = Forces down and Forces left = Forces right), then the object will have no translatory motion. In other words, the object
2.1 Scalars and Vectors
 2.1 Scalars and Vectors Scalar A quantity characterized by a positive or negative number Indicated by letters in italic such as A e.g. Mass, volume and length 2.1 Scalars and Vectors Vector A quantity
2.1 Scalars and Vectors Scalar A quantity characterized by a positive or negative number Indicated by letters in italic such as A e.g. Mass, volume and length 2.1 Scalars and Vectors Vector A quantity
Physics 111. Lecture 23 (Walker: 10.6, 11.1) Conservation of Energy in Rotation Torque March 30, Kinetic Energy of Rolling Object
 Conservation of Energy in Rotation Torque March 30, Kinetic Energy of Rolling Object") Physics 111 Lecture 3 (Walker: 10.6, 11.1) Conservation of Energy in Rotation Torque March 30, 009 Lecture 3 1/4 Kinetic Energy of Rolling Object Total kinetic energy of a rolling object is the sum of
Physics 111 Lecture 3 (Walker: 10.6, 11.1) Conservation of Energy in Rotation Torque March 30, 009 Lecture 3 1/4 Kinetic Energy of Rolling Object Total kinetic energy of a rolling object is the sum of