2. Force Systems. 2.1 Introduction. 2.2 Force
|
|
|
- Felicity Simmons
- 5 years ago
- Views:
Transcription
1 2. Force Systems 2.1 Introduction 2.2 Force - A force is an action of one body on another. - A force is an action which tends to cause acceleration of a body (in dynamics). - A force is a vector quantity. - The complete specification of the action of a force must include its magnitude, direction, and point of application. External and internal effects - External forces can be either applied forces or reaction forces. - Internal forces are resultants of stresses caused by external forces. A A A N N F F F A, F : external N : internal 1
2 Principle of Transmissibility - Assume: rigid body - The principle of transmissibility states that a force may be applied at any point on its given line of action without altering the resultant effects of the force external to the rigid body The external effects at O and C (support reactions) remain the same regardless on which point of the line of action of the force, the force acts. - In this case, the force may be treated as sliding vector. - The principle of transmissibility is not valid for elastic bodes if we study the internal effects of a force. In this case, the force is a fixed vector Force Classification - Forces are classified as either contact or body forces - Contact forces are caused by the direct contact of one body with the surface of another - A body force occurs when one body exerts a force on another body without direct physical contact between the bodies. Examples include the effects caused by the earth s gravitation or its electromagnetic field. - Force may be further classified as either concentrated or distributed 2

3 Action and reaction - The action of a force is always accompanied by an equal and opposite reaction. - It is important to distinguish between the action and the reaction in a pairs of forces. F F A A B R F : Action force R : Reaction force, exerted on body A by body B. 3


4 Concurrent Forces - Two or more forces are said to be concurrent at a point if their lines of action intersect at that point. - Use parallelogram law to determine the resultant 4

5 - We can also use the triangle law to obtain R, but we need to move the line of action of one of the forces. If we add the same two forces, we correctly preserve the magnitude and direction of R, but we lose the correct line of action, because R obtained in this way does not pass through A. Therefore this type of combination should be avoided. - The relationship between a force and its vector components along given axes must not be confused with the relationship between a force and its perpendicular projections onto the same axes. 5
 A special Case of")

6 Vector Components - We often need to replace a force by its vector components in direction which are convenient for a given application Note: F a Fcosθ But F x = Fcosθ (rectangular components) A special Case of Vector Addition - Used when the resultant of two parallel forces is to be determined. - Applicable on rigid bodies only - R is the resultant of the forces F 1 and F 2 and is correct in magnitude, direction, and line of action. 6
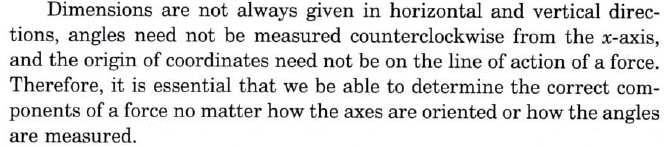
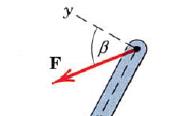
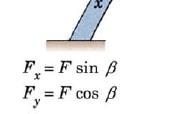
7 2.3 Rectangular Components of a Force cos sin tan F is the magnitude of the force vector F and is always positive, where Fx and F y can be positive or negative. F x, F y are the vector components of F in the x- and y-directions. F x, F y are the scalar components of F. When both a force and its vector components appear in a diagram, it is desirable to show the vector components of the force with dashed lines and show the force with a solid line, or vice versa. (Only one force F, or two components F x and F y, but not 3 separate forces). 7
8 The choice of a coordinate system is arbitrary. A logical choice simplifies the solution of the problem. y y y β γ F α F x F x x cosβ sin cos sinβ cos sin 0 Note: In all three cases the magnitude F is the same and is defined as 8

9 Determining the Components of a Force 9
10 Determining the Resultant of two Forces 10


11 2.4 Moment - A force can tend to rotate a body about an axis which neither intersects nor is parallel to the line of action of the force. This rotational tendency is known as the moment M of a force. - The moment M of a force F about a point A is defined using cross product as where r is a position vector which runs from the moment reference point A to any point on the line of action of F. - Note. - Moment about a point A means here: Moment with respect to an axis normal to the plane and passing through the point A. 11

12 - The magnitude M of the moment is defined as: sin where d is a moment arm and is defined as the perpendicular distance between the line of action of the force and the moment center. - The moment M is a vector quantity. Its direction is perpendicular to the r-f-plane. - The sense of M depends on the direction in which F tends to rotate the body right-hand rule + : counterclockwise rotation. - : clockwise rotation. Sign consistency within a given problem is very important. - The moment M may be considered as a sliding vector with a line of action coinciding with the moment axis. 12

13 Varignon s Theorem - Valid for any number of concurrent forces - States that the moment of a force (R) about any point is equal to the sum of the moments of the components (P, Q) of the force about the same point. - The theorem can be stated in another way as: The resultant moment M of the moments M i of the concurrent forces F i is equal to the moment of their resultant R. 13



14 2.5 Couple - The moment produced by two equal, opposite, parallel, and noncollinear forces is called a couple. - The force resultant of a couple is zero. Its only effect is to produce a tendency of rotation. - The moment M of a couple is defined as where r A and r B are position vectors which run from point O to arbitrary points A and B on the lines of action of F and F. - The moment expression contains no reference to the moment center O and, therefore, is the same for all moment centers the moment of a couple is a free vector. - The sense of the moment M is established by the right-hand rule. Counterclockwise couple (+) Clockwise couple (-) 14
. - The magnitude of the couple is independent of the distance a.")

15 - The magnitude M of the moment M of the couple is given as where d is the perpendicular distance between the couple forces (F, -F). - The magnitude of the couple is independent of the distance a. Equivalent Couples - Changing the values of F and d does not change a given couple as long as the product Fd remains the same. - A couple is not affected if the forces act in a different but parallel plane. 15
16 Force-Couple Systems - The effect of a force acting on a body is: a) the tendency to push or pull the body in the direction of the force, and b) to rotate the body about any fixed axis which does not intersect the line of action of the force ( force does not go through the mass center of the body). We can represent this dual effect more easily by replacing the given force by an equal parallel force and a couple to compensate for the change in the moment of the force. - Also we can combine a given couple and a force which lies in the plane of the couple to produce a single, equivalent force. 16
17 2/6 Resultants Reduce the system of forces and moments to a resultant force R only or to a resultant force R and a resultant moment M O. The resultant of a system of forces is the simplest force combination which can replace the original forces without altering the external effect on the rigid body to which the forces are applied. Assume: all forces act in one plane (x-y plane) and the moments act about an axis perpendicular to this plane. The resultant of a system of forces is the simplest force combination which can replace the original forces without altering the external effect on the rigid body to which the forces are applied. 17

18 a. Force Polygon Method Yields magnitude and direction of the resultant only Line of action of the resultant remains undetermined. b. Parallelogram Law Yields: Magnitude, direction, and the correct line of action 18
19 c. Algebraic Method Example: Three force-system 1. Choose a convenient reference point O and move all forces to that point with considering the couples M 1, M 2, and M 3 resulting from the transfer of forces F 1, F 2, and F 3 from their respective original lines of action to parallel lines of action through point O. 2. Add all forces at O to form the resultant force R, and add all couples to form the resultant couple M O. 19
20 3. Find the line of action of R by requiring R to have a moment of M O about point O. - For concurrent system of forces where the lines of action of all forces pass through a common point O, the moment sum M o about that point is zero. - For a parallel force system, select a coordinate axis in the direction of the forces. - If the resultant force R for a given force system is zero, the resultant of the system need not be zero because the resultant may be a couple. Principle of moments States that the moment of the resultant force about any point O equals the sum of the moments of the original forces of the system about the same point. The may be concurrent or nonconcurrent. 20
Engineering Mechanics: Statics
 Engineering Mechanics: Statics Chapter 2: Force Systems Part A: Two Dimensional Force Systems Force Force = an action of one body on another Vector quantity External and Internal forces Mechanics of Rigid
Engineering Mechanics: Statics Chapter 2: Force Systems Part A: Two Dimensional Force Systems Force Force = an action of one body on another Vector quantity External and Internal forces Mechanics of Rigid
Force Couple Systems = Replacement of a Force with an Equivalent Force and Moment (Moving a Force to Another Point)
") orce Couple Sstems = eplacement of a orce with an Equivalent orce and oment (oving a orce to Another Point) The force acting on a bod has two effects: The first one is the tendenc to push or pull the bod
orce Couple Sstems = eplacement of a orce with an Equivalent orce and oment (oving a orce to Another Point) The force acting on a bod has two effects: The first one is the tendenc to push or pull the bod
Force System Resultants. Engineering Mechanics: Statics
 Force System Resultants Engineering Mechanics: Statics Chapter Objectives To discuss the concept of the moment of a force and show how to calculate it in 2-D and 3-D systems. Definition of the moment of
Force System Resultants Engineering Mechanics: Statics Chapter Objectives To discuss the concept of the moment of a force and show how to calculate it in 2-D and 3-D systems. Definition of the moment of
acting on a body has two effects:
 The force acting on a body has two effects: the first one is the tendency to push or pull the body in the direction of the force, and the second one is to rotate the body about any fixed axis which does
The force acting on a body has two effects: the first one is the tendency to push or pull the body in the direction of the force, and the second one is to rotate the body about any fixed axis which does
Force Couple Systems = Reduction of a Force to an Equivalent Force and Moment (Moving a Force to Another Point) acting on a body has two effects:
 acting on a body has two effects:") ESULTANTS orce Couple Systems = eduction of a orce to an Equivalent orce and Moment (Moving a orce to Another Point) The force acting on a body has two effects: the first one is the tendency to push or
ESULTANTS orce Couple Systems = eduction of a orce to an Equivalent orce and Moment (Moving a orce to Another Point) The force acting on a body has two effects: the first one is the tendency to push or
Ishik University / Sulaimani Architecture Department Structure ARCH 214 Chapter -4- Force System Resultant
 Ishik University / Sulaimani Architecture Department 1 Structure ARCH 214 Chapter -4- Force System Resultant 2 1 CHAPTER OBJECTIVES To discuss the concept of the moment of a force and show how to calculate
Ishik University / Sulaimani Architecture Department 1 Structure ARCH 214 Chapter -4- Force System Resultant 2 1 CHAPTER OBJECTIVES To discuss the concept of the moment of a force and show how to calculate
Mechanics: Scalars and Vectors
 Mechanics: Scalars and Vectors Scalar Onl magnitude is associated with it Vector e.g., time, volume, densit, speed, energ, mass etc. Possess direction as well as magnitude Parallelogram law of addition
Mechanics: Scalars and Vectors Scalar Onl magnitude is associated with it Vector e.g., time, volume, densit, speed, energ, mass etc. Possess direction as well as magnitude Parallelogram law of addition
Chapter -4- Force System Resultant
 Ishik University / Sulaimani Civil Engineering Department Chapter -4- Force System Resultant 1 2 1 CHAPTER OBJECTIVES To discuss the concept of the moment of a force and show how to calculate it in two
Ishik University / Sulaimani Civil Engineering Department Chapter -4- Force System Resultant 1 2 1 CHAPTER OBJECTIVES To discuss the concept of the moment of a force and show how to calculate it in two
Moment of a force (scalar, vector ) Cross product Principle of Moments Couples Force and Couple Systems Simple Distributed Loading
 Cross product Principle of Moments Couples Force and Couple Systems Simple Distributed Loading") Chapter 4 Moment of a force (scalar, vector ) Cross product Principle of Moments Couples Force and Couple Systems Simple Distributed Loading The moment of a force about a point provides a measure of the
Chapter 4 Moment of a force (scalar, vector ) Cross product Principle of Moments Couples Force and Couple Systems Simple Distributed Loading The moment of a force about a point provides a measure of the
MECHANICS. Prepared by Engr. John Paul Timola
 MECHANICS Prepared by Engr. John Paul Timola MECHANICS a branch of the physical sciences that is concerned with the state of rest or motion of bodies that are subjected to the action of forces. subdivided
MECHANICS Prepared by Engr. John Paul Timola MECHANICS a branch of the physical sciences that is concerned with the state of rest or motion of bodies that are subjected to the action of forces. subdivided
Engineering Mechanics Prof. U. S. Dixit Department of Mechanical Engineering Indian Institute of Technology, Guwahati
 Engineering Mechanics Prof. U. S. Dixit Department of Mechanical Engineering Indian Institute of Technology, Guwahati Module No. - 01 Basics of Statics Lecture No. - 01 Fundamental of Engineering Mechanics
Engineering Mechanics Prof. U. S. Dixit Department of Mechanical Engineering Indian Institute of Technology, Guwahati Module No. - 01 Basics of Statics Lecture No. - 01 Fundamental of Engineering Mechanics
Engineering Mechanics I. Phongsaen PITAKWATCHARA
 2103-213 Engineering Mechanics I phongsaen@gmail.com December 6, 2007 Contents Preface iii 1 Introduction to Statics 1 1.0 Outline................................. 2 1.1 Basic Concepts............................
2103-213 Engineering Mechanics I phongsaen@gmail.com December 6, 2007 Contents Preface iii 1 Introduction to Statics 1 1.0 Outline................................. 2 1.1 Basic Concepts............................
Chapter 12 Static Equilibrium
 Chapter Static Equilibrium. Analysis Model: Rigid Body in Equilibrium. More on the Center of Gravity. Examples of Rigid Objects in Static Equilibrium CHAPTER : STATIC EQUILIBRIUM AND ELASTICITY.) The Conditions
Chapter Static Equilibrium. Analysis Model: Rigid Body in Equilibrium. More on the Center of Gravity. Examples of Rigid Objects in Static Equilibrium CHAPTER : STATIC EQUILIBRIUM AND ELASTICITY.) The Conditions
TEST-1 MEACHNICAL (MEACHNICS)
") 1 TEST-1 MEACHNICAL (MEACHNICS) Objective Type Questions:- Q.1 The term force may be defined as an agent t which produces or tends to produce, destroys or tends to destroy motion. a) Agree b) disagree
1 TEST-1 MEACHNICAL (MEACHNICS) Objective Type Questions:- Q.1 The term force may be defined as an agent t which produces or tends to produce, destroys or tends to destroy motion. a) Agree b) disagree
Please Visit us at:
 IMPORTANT QUESTIONS WITH ANSWERS Q # 1. Differentiate among scalars and vectors. Scalars Vectors (i) The physical quantities that are completely (i) The physical quantities that are completely described
IMPORTANT QUESTIONS WITH ANSWERS Q # 1. Differentiate among scalars and vectors. Scalars Vectors (i) The physical quantities that are completely (i) The physical quantities that are completely described
Mathematics. Statistics
 Mathematics Statistics Table of Content. Introduction.. arallelogram law of forces. 3. Triangle law of forces. 4. olygon law of forces. 5. Lami's theorem. 6. arallel forces. 7. Moment. 8. Couples. 9. Triangle
Mathematics Statistics Table of Content. Introduction.. arallelogram law of forces. 3. Triangle law of forces. 4. olygon law of forces. 5. Lami's theorem. 6. arallel forces. 7. Moment. 8. Couples. 9. Triangle
ARC241 Structural Analysis I Lecture 1, Sections ST1.1 ST2.4
 Lecture 1, Sections ST1.1 ST2.4 ST1.1-ST1.2) Introduction ST1.3) Units of Measurements ST1.4) The International System (SI) of Units ST1.5) Numerical Calculations ST1.6) General Procedure of Analysis ST2.1)
Lecture 1, Sections ST1.1 ST2.4 ST1.1-ST1.2) Introduction ST1.3) Units of Measurements ST1.4) The International System (SI) of Units ST1.5) Numerical Calculations ST1.6) General Procedure of Analysis ST2.1)
Dr. ANIL PATIL Associate Professor M.E.D., D.I.T., Dehradun
 by Dr. ANIL PATIL Associate Professor M.E.D., D.I.T., Dehradun 1 2 Mechanics The study of forces and their effect upon body under consideration Statics Deals with the forces which are acting on a body
by Dr. ANIL PATIL Associate Professor M.E.D., D.I.T., Dehradun 1 2 Mechanics The study of forces and their effect upon body under consideration Statics Deals with the forces which are acting on a body
Chap. 3 Rigid Bodies: Equivalent Systems of Forces. External/Internal Forces; Equivalent Forces
 Chap. 3 Rigid Bodies: Equivalent Systems of Forces Treatment of a body as a single particle is not always possible. In general, the size of the body and the specific points of application of the forces
Chap. 3 Rigid Bodies: Equivalent Systems of Forces Treatment of a body as a single particle is not always possible. In general, the size of the body and the specific points of application of the forces
MOMENT OF A FORCE ABOUT A POINT
 MOMENT OF A FORCE ABOUT A POINT The tendency of a body to rotate about an axis passing through a specific point O when acted upon by a force (sometimes called a torque). 1 APPLICATIONS A torque or moment
MOMENT OF A FORCE ABOUT A POINT The tendency of a body to rotate about an axis passing through a specific point O when acted upon by a force (sometimes called a torque). 1 APPLICATIONS A torque or moment
Tenth Edition STATICS 1 Ferdinand P. Beer E. Russell Johnston, Jr. David F. Mazurek Lecture Notes: John Chen California Polytechnic State University
 T E CHAPTER 1 VECTOR MECHANICS FOR ENGINEERS: STATICS Ferdinand P. Beer E. Russell Johnston, Jr. David F. Mazurek Lecture Notes: Introduction John Chen California Polytechnic State University! Contents
T E CHAPTER 1 VECTOR MECHANICS FOR ENGINEERS: STATICS Ferdinand P. Beer E. Russell Johnston, Jr. David F. Mazurek Lecture Notes: Introduction John Chen California Polytechnic State University! Contents
K.GNANASEKARAN. M.E.,M.B.A.,(Ph.D)
") DEPARTMENT OF MECHANICAL ENGG. Engineering Mechanics I YEAR 2th SEMESTER) Two Marks Question Bank UNIT-I Basics and statics of particles 1. Define Engineering Mechanics Engineering Mechanics is defined
DEPARTMENT OF MECHANICAL ENGG. Engineering Mechanics I YEAR 2th SEMESTER) Two Marks Question Bank UNIT-I Basics and statics of particles 1. Define Engineering Mechanics Engineering Mechanics is defined
APPLIED MECHANICS I Resultant of Concurrent Forces Consider a body acted upon by co-planar forces as shown in Fig 1.1(a).
.") PPLIED MECHNICS I 1. Introduction to Mechanics Mechanics is a science that describes and predicts the conditions of rest or motion of bodies under the action of forces. It is divided into three parts 1.
PPLIED MECHNICS I 1. Introduction to Mechanics Mechanics is a science that describes and predicts the conditions of rest or motion of bodies under the action of forces. It is divided into three parts 1.
two forces and moments Structural Math Physics for Structures Structural Math
 RHITETURL STRUTURES: ORM, EHVIOR, ND DESIGN DR. NNE NIHOLS SUMMER 05 lecture two forces and moments orces & Moments rchitectural Structures 009abn Structural Math quantify environmental loads how big is
RHITETURL STRUTURES: ORM, EHVIOR, ND DESIGN DR. NNE NIHOLS SUMMER 05 lecture two forces and moments orces & Moments rchitectural Structures 009abn Structural Math quantify environmental loads how big is
Course Overview. Statics (Freshman Fall) Dynamics: x(t)= f(f(t)) displacement as a function of time and applied force
 Dynamics: x(t)= f(f(t)) displacement as a function of time and applied force") Course Overview Statics (Freshman Fall) Engineering Mechanics Dynamics (Freshman Spring) Strength of Materials (Sophomore Fall) Mechanism Kinematics and Dynamics (Sophomore Spring ) Aircraft structures
Course Overview Statics (Freshman Fall) Engineering Mechanics Dynamics (Freshman Spring) Strength of Materials (Sophomore Fall) Mechanism Kinematics and Dynamics (Sophomore Spring ) Aircraft structures
ISBN :
 ISBN : 978-81-909042-4-7 - www.airwalkpublications.com ANNA UNIVERSITY - R2013 GE6253 ENGINEERING MECHANICS UNIT I: BASICS AND STATICS OF PARTICLES 12 Introduction Units and Dimensions Laws of Mechanics
ISBN : 978-81-909042-4-7 - www.airwalkpublications.com ANNA UNIVERSITY - R2013 GE6253 ENGINEERING MECHANICS UNIT I: BASICS AND STATICS OF PARTICLES 12 Introduction Units and Dimensions Laws of Mechanics
Engineering Mechanics. Electrical Engineering. First stage
 Assist AliA. A Engineering Mechanics Electrical Engineering First stage Syllabus Static 1- General Princples 2- System of Forces 3- Composition and Resolution of Foreces Moments 5- Equilibrium 6- Trusses
Assist AliA. A Engineering Mechanics Electrical Engineering First stage Syllabus Static 1- General Princples 2- System of Forces 3- Composition and Resolution of Foreces Moments 5- Equilibrium 6- Trusses
ME 230 Kinematics and Dynamics
 ME 230 Kinematics and Dynamics Wei-Chih Wang Department of Mechanical Engineering University of Washington Lecture 6: Particle Kinetics Kinetics of a particle (Chapter 13) - 13.4-13.6 Chapter 13: Objectives
ME 230 Kinematics and Dynamics Wei-Chih Wang Department of Mechanical Engineering University of Washington Lecture 6: Particle Kinetics Kinetics of a particle (Chapter 13) - 13.4-13.6 Chapter 13: Objectives
Fundamental Principles
 Fundamental Principles Newton s First Law: If the resultant force on a particle is zero, the particle will remain at rest or continue to move in a straight line. First Law: A. body will remain at rest
Fundamental Principles Newton s First Law: If the resultant force on a particle is zero, the particle will remain at rest or continue to move in a straight line. First Law: A. body will remain at rest
Vector Mechanics: Statics
 PDHOnline Course G492 (4 PDH) Vector Mechanics: Statics Mark A. Strain, P.E. 2014 PDH Online PDH Center 5272 Meadow Estates Drive Fairfax, VA 22030-6658 Phone & Fax: 703-988-0088 www.pdhonline.org www.pdhcenter.com
PDHOnline Course G492 (4 PDH) Vector Mechanics: Statics Mark A. Strain, P.E. 2014 PDH Online PDH Center 5272 Meadow Estates Drive Fairfax, VA 22030-6658 Phone & Fax: 703-988-0088 www.pdhonline.org www.pdhcenter.com
Chapter 2 Statics of Particles. Resultant of Two Forces 8/28/2014. The effects of forces on particles:
 Chapter 2 Statics of Particles The effects of forces on particles: - replacing multiple forces acting on a particle with a single equivalent or resultant force, - relations between forces acting on a particle
Chapter 2 Statics of Particles The effects of forces on particles: - replacing multiple forces acting on a particle with a single equivalent or resultant force, - relations between forces acting on a particle
Chapter 8. Centripetal Force and The Law of Gravity
 Chapter 8 Centripetal Force and The Law of Gravity Centripetal Acceleration An object traveling in a circle, even though it moves with a constant speed, will have an acceleration The centripetal acceleration
Chapter 8 Centripetal Force and The Law of Gravity Centripetal Acceleration An object traveling in a circle, even though it moves with a constant speed, will have an acceleration The centripetal acceleration
ARCH 331 Note Set 3.1 Su2016abn. Forces and Vectors
 orces and Vectors Notation: = name for force vectors, as is A, B, C, T and P = force component in the direction = force component in the direction R = name for resultant vectors R = resultant component
orces and Vectors Notation: = name for force vectors, as is A, B, C, T and P = force component in the direction = force component in the direction R = name for resultant vectors R = resultant component
ARC241 Structural Analysis I Lecture 5, Sections ST4.5 ST4.10
 Lecture 5, Sections ST4.5 ST4.10 ST4.5) Moment of a Force about a Specified Axis ST4.6) Moment of a Couple ST4.7) Equivalent System ST4.8) Resultant of a Force and a Couple System ST4.9) Further Reduction
Lecture 5, Sections ST4.5 ST4.10 ST4.5) Moment of a Force about a Specified Axis ST4.6) Moment of a Couple ST4.7) Equivalent System ST4.8) Resultant of a Force and a Couple System ST4.9) Further Reduction
Parallel Forces. Forces acting in the same or in opposite directions at different points on an object.
 Parallel Forces Forces acting in the same or in opposite directions at different points on an object. Statics refers to the bodies in equilibrium. Equilibrium deals with the absence of a net force. When
Parallel Forces Forces acting in the same or in opposite directions at different points on an object. Statics refers to the bodies in equilibrium. Equilibrium deals with the absence of a net force. When
Three-Dimensional Coordinate Systems. Three-Dimensional Coordinate Systems. Three-Dimensional Coordinate Systems. Three-Dimensional Coordinate Systems
 To locate a point in a plane, two numbers are necessary. We know that any point in the plane can be represented as an ordered pair (a, b) of real numbers, where a is the x-coordinate and b is the y-coordinate.
To locate a point in a plane, two numbers are necessary. We know that any point in the plane can be represented as an ordered pair (a, b) of real numbers, where a is the x-coordinate and b is the y-coordinate.
Review of Coordinate Systems
 Vector in 2 R and 3 R Review of Coordinate Systems Used to describe the position of a point in space Common coordinate systems are: Cartesian Polar Cartesian Coordinate System Also called rectangular coordinate
Vector in 2 R and 3 R Review of Coordinate Systems Used to describe the position of a point in space Common coordinate systems are: Cartesian Polar Cartesian Coordinate System Also called rectangular coordinate
Chapter 2: Force Vectors
 Chapter 2: Force Vectors Chapter Objectives To show how to add forces and resolve them into components using the Parallelogram Law. To express force and position in Cartesian vector form and explain how
Chapter 2: Force Vectors Chapter Objectives To show how to add forces and resolve them into components using the Parallelogram Law. To express force and position in Cartesian vector form and explain how
Levers of the Musculoskeletal System
 Levers of the Musculoskeletal System Lever system consists of: lever fulcrum load force Three classes of levers 1. first class (a) - pry bars, crowbars 2. second class (b) - wheelbarrow 3. third class
Levers of the Musculoskeletal System Lever system consists of: lever fulcrum load force Three classes of levers 1. first class (a) - pry bars, crowbars 2. second class (b) - wheelbarrow 3. third class
UNIT 1: BASIC CONCEPTS
 Civil & Engg. 1 UNIT 1: BASIC CONCETS 1. INTRODUCTION: Solids Rigid solids (Engg Mechanics deals with them) Deformable solids (Solid Mechanics deals with them) Matter (Substance) Fluids Liquids (Fluid
Civil & Engg. 1 UNIT 1: BASIC CONCETS 1. INTRODUCTION: Solids Rigid solids (Engg Mechanics deals with them) Deformable solids (Solid Mechanics deals with them) Matter (Substance) Fluids Liquids (Fluid
CE 201 Statics. 2 Physical Sciences. Rigid-Body Deformable-Body Fluid Mechanics Mechanics Mechanics
 CE 201 Statics 2 Physical Sciences Branch of physical sciences 16 concerned with the state of Mechanics rest motion of bodies that are subjected to the action of forces Rigid-Body Deformable-Body Fluid
CE 201 Statics 2 Physical Sciences Branch of physical sciences 16 concerned with the state of Mechanics rest motion of bodies that are subjected to the action of forces Rigid-Body Deformable-Body Fluid
SKAA 1213 Engineering Mechanics
 SKAA 1213 Engineering Mechanics TPIC 5 Moment and Couple Lecturers: Rosli Anang Dr. Mohd Yunus Ishak Dr. Tan Cher Siang Moment of a Force Moment of a force about a point/axis the tendency of the force
SKAA 1213 Engineering Mechanics TPIC 5 Moment and Couple Lecturers: Rosli Anang Dr. Mohd Yunus Ishak Dr. Tan Cher Siang Moment of a Force Moment of a force about a point/axis the tendency of the force
Lecture Outline Chapter 11. Physics, 4 th Edition James S. Walker. Copyright 2010 Pearson Education, Inc.
 Lecture Outline Chapter 11 Physics, 4 th Edition James S. Walker Chapter 11 Rotational Dynamics and Static Equilibrium Units of Chapter 11 Torque Torque and Angular Acceleration Zero Torque and Static
Lecture Outline Chapter 11 Physics, 4 th Edition James S. Walker Chapter 11 Rotational Dynamics and Static Equilibrium Units of Chapter 11 Torque Torque and Angular Acceleration Zero Torque and Static
Vectors and Fields. Vectors versus scalars
 C H A P T E R 1 Vectors and Fields Electromagnetics deals with the study of electric and magnetic fields. It is at once apparent that we need to familiarize ourselves with the concept of a field, and in
C H A P T E R 1 Vectors and Fields Electromagnetics deals with the study of electric and magnetic fields. It is at once apparent that we need to familiarize ourselves with the concept of a field, and in
Vectors Coordinate frames 2D implicit curves 2D parametric curves. Graphics 2008/2009, period 1. Lecture 2: vectors, curves, and surfaces
 Graphics 2008/2009, period 1 Lecture 2 Vectors, curves, and surfaces Computer graphics example: Pixar (source: http://www.pixar.com) Computer graphics example: Pixar (source: http://www.pixar.com) Computer
Graphics 2008/2009, period 1 Lecture 2 Vectors, curves, and surfaces Computer graphics example: Pixar (source: http://www.pixar.com) Computer graphics example: Pixar (source: http://www.pixar.com) Computer
ME101 (Division III) webpage
 webpage") ME101 (Division III) webpage Lecture Slides available on http://www.iitg.ernet.in/kd/me101.htm Also available on: http://shilloi.iitg.ernet.in/~kd/me101.htm Equivalent Systems: Resultants Equilibrium Equilibrium
ME101 (Division III) webpage Lecture Slides available on http://www.iitg.ernet.in/kd/me101.htm Also available on: http://shilloi.iitg.ernet.in/~kd/me101.htm Equivalent Systems: Resultants Equilibrium Equilibrium
Chapter Objectives. Copyright 2011 Pearson Education South Asia Pte Ltd
 Chapter Objectives To show how to add forces and resolve them into components using the Parallelogram Law. To express force and position in Cartesian vector form and explain how to determine the vector
Chapter Objectives To show how to add forces and resolve them into components using the Parallelogram Law. To express force and position in Cartesian vector form and explain how to determine the vector
 For a general development of the theoretical aspects of mechanics, however, a more rigorous treatment is possible by using vector analysis. A vector may be denoted by drawing a short arrow above the letter
For a general development of the theoretical aspects of mechanics, however, a more rigorous treatment is possible by using vector analysis. A vector may be denoted by drawing a short arrow above the letter
Appendix. Vectors, Systems of Equations
 ppendix Vectors, Systems of Equations Vectors, Systems of Equations.1.1 Vectors Scalar physical quantities (e.g., time, mass, density) possess only magnitude. Vectors are physical quantities (e.g., force,
ppendix Vectors, Systems of Equations Vectors, Systems of Equations.1.1 Vectors Scalar physical quantities (e.g., time, mass, density) possess only magnitude. Vectors are physical quantities (e.g., force,
Vectors and the Geometry of Space
 Vectors and the Geometry of Space Many quantities in geometry and physics, such as area, volume, temperature, mass, and time, can be characterized by a single real number scaled to appropriate units of
Vectors and the Geometry of Space Many quantities in geometry and physics, such as area, volume, temperature, mass, and time, can be characterized by a single real number scaled to appropriate units of
Unit 1. (a) tan α = (b) tan α = (c) tan α = (d) tan α =
 tan α = (b) tan α = (c) tan α = (d) tan α =") Unit 1 1. The subjects Engineering Mechanics deals with (a) Static (b) kinematics (c) Kinetics (d) All of the above 2. If the resultant of two forces P and Q is acting at an angle α with P, then (a) tan
Unit 1 1. The subjects Engineering Mechanics deals with (a) Static (b) kinematics (c) Kinetics (d) All of the above 2. If the resultant of two forces P and Q is acting at an angle α with P, then (a) tan
Model Answers Attempt any TEN of the following :
 (ISO/IEC - 70-005 Certified) Model Answer: Winter 7 Sub. Code: 17 Important Instructions to Examiners: 1) The answers should be examined by key words and not as word-to-word as given in the model answer
(ISO/IEC - 70-005 Certified) Model Answer: Winter 7 Sub. Code: 17 Important Instructions to Examiners: 1) The answers should be examined by key words and not as word-to-word as given in the model answer
CHAPTER 1 INTRODUCTION
 CHAPTER 1 INTRODUCTION DEFINITION OF MECHANICS Mechanics may be defined as the physical science which describes and predicts the conditions of rest or motion of bodies under the action of force systems.
CHAPTER 1 INTRODUCTION DEFINITION OF MECHANICS Mechanics may be defined as the physical science which describes and predicts the conditions of rest or motion of bodies under the action of force systems.
Equivalent Force Systems
 Equivalent Force Systems EQUIVALENT SYSTEMS for SINGLE FORCE Determining the effect of moving a force. 1. MOVING A FORCE ON ITS LINE OF ACTION 2. MOVING A FORCE OFF OF ITS LINE OF ACTION Equivalent Force
Equivalent Force Systems EQUIVALENT SYSTEMS for SINGLE FORCE Determining the effect of moving a force. 1. MOVING A FORCE ON ITS LINE OF ACTION 2. MOVING A FORCE OFF OF ITS LINE OF ACTION Equivalent Force
Ishik University / Sulaimani Civil Engineering Department. Chapter -2-
 Ishik University / Sulaimani Civil Engineering Department Chapter -- 1 orce Vectors Contents : 1. Scalars and Vectors. Vector Operations 3. Vector Addition of orces 4. Addition of a System of Coplanar
Ishik University / Sulaimani Civil Engineering Department Chapter -- 1 orce Vectors Contents : 1. Scalars and Vectors. Vector Operations 3. Vector Addition of orces 4. Addition of a System of Coplanar
TABLE OF CONTENTS MECHANICS
 TABLE OF CONTENTS MECHANICS MECHANICS 113 Terms and Definitions 114 Unit Systems 114 Gravity 116 Metric (SI) System 118 Force Systems 118 Scalar and Vector Quantities 118 Graphical Resolution of Forces
TABLE OF CONTENTS MECHANICS MECHANICS 113 Terms and Definitions 114 Unit Systems 114 Gravity 116 Metric (SI) System 118 Force Systems 118 Scalar and Vector Quantities 118 Graphical Resolution of Forces
Chapter 5: Equilibrium of a Rigid Body
 Chapter 5: Equilibrium of a Rigid Body Develop the equations of equilibrium for a rigid body Concept of the free-body diagram for a rigid body Solve rigid-body equilibrium problems using the equations
Chapter 5: Equilibrium of a Rigid Body Develop the equations of equilibrium for a rigid body Concept of the free-body diagram for a rigid body Solve rigid-body equilibrium problems using the equations
2- Scalars and Vectors
 2- Scalars and Vectors Scalars : have magnitude only : Length, time, mass, speed and volume is example of scalar. v Vectors : have magnitude and direction. v The magnitude of is written v v Position, displacement,
2- Scalars and Vectors Scalars : have magnitude only : Length, time, mass, speed and volume is example of scalar. v Vectors : have magnitude and direction. v The magnitude of is written v v Position, displacement,
Assignment No. 1 RESULTANT OF COPLANAR FORCES
 Assignment No. 1 RESULTANT OF COPLANAR FORCES Theory Questions: 1) Define force and body. (Dec. 2004 2 Mks) 2) State and explain the law of transmissibility of forces. (May 2009 4 Mks) Or 3) What is law
Assignment No. 1 RESULTANT OF COPLANAR FORCES Theory Questions: 1) Define force and body. (Dec. 2004 2 Mks) 2) State and explain the law of transmissibility of forces. (May 2009 4 Mks) Or 3) What is law
Simplified Structural Analysis and Design for Architects
 Simplified Structural Analysis and Design for Architects Second Edition Rima Taher, PhD, PE New Jersey Institute of Technology Bassim Hamadeh, CEO and Publisher Kassie Graves, Director of Acquisitions
Simplified Structural Analysis and Design for Architects Second Edition Rima Taher, PhD, PE New Jersey Institute of Technology Bassim Hamadeh, CEO and Publisher Kassie Graves, Director of Acquisitions
CIV100: Mechanics. Lecture Notes. Module 1: Force & Moment in 2D. You Know What to Do!
 CIV100: Mechanics Lecture Notes Module 1: Force & Moment in 2D By: Tamer El-Diraby, PhD, PEng. Associate Prof. & Director, I2C University of Toronto Acknowledgment: Hesham Osman, PhD and Jinyue Zhang,
CIV100: Mechanics Lecture Notes Module 1: Force & Moment in 2D By: Tamer El-Diraby, PhD, PEng. Associate Prof. & Director, I2C University of Toronto Acknowledgment: Hesham Osman, PhD and Jinyue Zhang,
l1, l2, l3, ln l1 + l2 + l3 + ln
 Work done by a constant force: Consider an object undergoes a displacement S along a straight line while acted on a force F that makes an angle θ with S as shown The work done W by the agent is the product
Work done by a constant force: Consider an object undergoes a displacement S along a straight line while acted on a force F that makes an angle θ with S as shown The work done W by the agent is the product
STATICS. Rigid Bodies: Equivalent Systems of Forces VECTOR MECHANICS FOR ENGINEERS: Eighth Edition CHAPTER. Ferdinand P. Beer E. Russell Johnston, Jr.
 Eighth E CHAPTER VECTOR MECHANICS FOR ENGINEERS: STATICS Ferdinand P. Beer E. Russell Johnston, Jr. Lecture Notes: J. Walt Oler Texas Tech University Rigid Bodies: Equivalent Systems of Forces Contents
Eighth E CHAPTER VECTOR MECHANICS FOR ENGINEERS: STATICS Ferdinand P. Beer E. Russell Johnston, Jr. Lecture Notes: J. Walt Oler Texas Tech University Rigid Bodies: Equivalent Systems of Forces Contents
Sports biomechanics explores the relationship between the body motion, internal forces and external forces to optimize the sport performance.
 What is biomechanics? Biomechanics is the field of study that makes use of the laws of physics and engineering concepts to describe motion of body segments, and the internal and external forces, which
What is biomechanics? Biomechanics is the field of study that makes use of the laws of physics and engineering concepts to describe motion of body segments, and the internal and external forces, which
SIMPLIFICATION OF FORCE AND COUPLE SYSTEMS & THEIR FURTHER SIMPLIFICATION
 SIMPLIFICATION OF FORCE AND COUPLE SYSTEMS & THEIR FURTHER SIMPLIFICATION Today s Objectives: Students will be able to: a) Determine the effect of moving a force. b) Find an equivalent force-couple system
SIMPLIFICATION OF FORCE AND COUPLE SYSTEMS & THEIR FURTHER SIMPLIFICATION Today s Objectives: Students will be able to: a) Determine the effect of moving a force. b) Find an equivalent force-couple system
PLANAR KINETIC EQUATIONS OF MOTION (Section 17.2)
") PLANAR KINETIC EQUATIONS OF MOTION (Section 17.2) We will limit our study of planar kinetics to rigid bodies that are symmetric with respect to a fixed reference plane. As discussed in Chapter 16, when
PLANAR KINETIC EQUATIONS OF MOTION (Section 17.2) We will limit our study of planar kinetics to rigid bodies that are symmetric with respect to a fixed reference plane. As discussed in Chapter 16, when
Two Hanging Masses. ) by considering just the forces that act on it. Use Newton's 2nd law while
 by considering just the forces that act on it. Use Newton's 2nd law while") Student View Summary View Diagnostics View Print View with Answers Edit Assignment Settings per Student Exam 2 - Forces [ Print ] Due: 11:59pm on Tuesday, November 1, 2011 Note: To underst how points are
Student View Summary View Diagnostics View Print View with Answers Edit Assignment Settings per Student Exam 2 - Forces [ Print ] Due: 11:59pm on Tuesday, November 1, 2011 Note: To underst how points are
Static Equilibrium. Lecture 24. Chapter 12. Physics I. Department of Physics and Applied Physics
 Lecture 24 Chapter 12 Physics I Static Equilibrium Course website: http://faculty.uml.edu/andriy_danylov/teaching/physicsi IN THIS CHAPTER, you will discuss static equilibrium of an object Today we are
Lecture 24 Chapter 12 Physics I Static Equilibrium Course website: http://faculty.uml.edu/andriy_danylov/teaching/physicsi IN THIS CHAPTER, you will discuss static equilibrium of an object Today we are
where G is called the universal gravitational constant.
 UNIT-I BASICS & STATICS OF PARTICLES 1. What are the different laws of mechanics? First law: A body does not change its state of motion unless acted upon by a force or Every object in a state of uniform
UNIT-I BASICS & STATICS OF PARTICLES 1. What are the different laws of mechanics? First law: A body does not change its state of motion unless acted upon by a force or Every object in a state of uniform
Chapter 9 TORQUE & Rotational Kinematics
 Chapter 9 TORQUE & Rotational Kinematics This motionless person is in static equilibrium. The forces acting on him add up to zero. Both forces are vertical in this case. This car is in dynamic equilibrium
Chapter 9 TORQUE & Rotational Kinematics This motionless person is in static equilibrium. The forces acting on him add up to zero. Both forces are vertical in this case. This car is in dynamic equilibrium
Chapter 4. Table of Contents. Section 1 Changes in Motion. Section 2 Newton's First Law. Section 3 Newton's Second and Third Laws
 Forces and the Laws of Motion Table of Contents Section 1 Changes in Motion Section 2 Newton's First Law Section 3 Newton's Second and Third Laws Section 4 Everyday Forces Section 1 Changes in Motion Objectives
Forces and the Laws of Motion Table of Contents Section 1 Changes in Motion Section 2 Newton's First Law Section 3 Newton's Second and Third Laws Section 4 Everyday Forces Section 1 Changes in Motion Objectives
Chapter -4- Force System Resultant
 Ishik University / Sulaimani Civil Engineering Department Chapter -4- Force System Resultant 1 4.3 MOMENT OF A COUPLE Couple - two parallel forces. - same magnitude but opposite direction. - separated
Ishik University / Sulaimani Civil Engineering Department Chapter -4- Force System Resultant 1 4.3 MOMENT OF A COUPLE Couple - two parallel forces. - same magnitude but opposite direction. - separated
Name. MECH 223 Engineering Statics. Midterm 1, February 24 th 2015
 1 Name MECH 223 Engineering Statics Midterm 1, February 24 th 2015 Question 1 (20 + 5 points) (a) (5 points) Form the vector products B C and B C (where B = B ) and use the result to prove the identity
1 Name MECH 223 Engineering Statics Midterm 1, February 24 th 2015 Question 1 (20 + 5 points) (a) (5 points) Form the vector products B C and B C (where B = B ) and use the result to prove the identity
Static equilibrium. Biomechanics 2 Static Equilibrium. Free-Body diagram Internal forces of structures. Last week: Forces and Moments
 Static equilibrium Biomechanics 2 Static Equilibrium Free-Body diagram Internal forces of structures Last week: Forces and Moments Force F: tends to change state of rest or motion Moment M: force acting
Static equilibrium Biomechanics 2 Static Equilibrium Free-Body diagram Internal forces of structures Last week: Forces and Moments Force F: tends to change state of rest or motion Moment M: force acting
Objective 1. Lesson 87: The Cross Product of Vectors IBHL - SANTOWSKI FINDING THE CROSS PRODUCT OF TWO VECTORS
 Lesson 87: The Cross Product of Vectors IBHL - SANTOWSKI In this lesson you will learn how to find the cross product of two vectors how to find an orthogonal vector to a plane defined by two vectors how
Lesson 87: The Cross Product of Vectors IBHL - SANTOWSKI In this lesson you will learn how to find the cross product of two vectors how to find an orthogonal vector to a plane defined by two vectors how
Chapter 8. Rotational Kinematics
 Chapter 8 Rotational Kinematics 8.3 The Equations of Rotational Kinematics 8.4 Angular Variables and Tangential Variables The relationship between the (tangential) arc length, s, at some radius, r, and
Chapter 8 Rotational Kinematics 8.3 The Equations of Rotational Kinematics 8.4 Angular Variables and Tangential Variables The relationship between the (tangential) arc length, s, at some radius, r, and
Section 1 Changes in Motion. Chapter 4. Preview. Objectives Force Force Diagrams
 Section 1 Changes in Motion Preview Objectives Force Force Diagrams Section 1 Changes in Motion Objectives Describe how force affects the motion of an object. Interpret and construct free body diagrams.
Section 1 Changes in Motion Preview Objectives Force Force Diagrams Section 1 Changes in Motion Objectives Describe how force affects the motion of an object. Interpret and construct free body diagrams.
Chapter 2 Mechanical Equilibrium
 Chapter 2 Mechanical Equilibrium I. Force (2.1) A. force is a push or pull 1. A force is needed to change an object s state of motion 2. State of motion may be one of two things a. At rest b. Moving uniformly
Chapter 2 Mechanical Equilibrium I. Force (2.1) A. force is a push or pull 1. A force is needed to change an object s state of motion 2. State of motion may be one of two things a. At rest b. Moving uniformly
Introduction to Engineering Mechanics
 CHPTER 1 Introduction to Engineering Mechanics The state of rest and state of motion of the bodies under the action of different forces has engaged the attention of philosophers, mathematicians and scientists
CHPTER 1 Introduction to Engineering Mechanics The state of rest and state of motion of the bodies under the action of different forces has engaged the attention of philosophers, mathematicians and scientists
PLANAR KINETICS OF A RIGID BODY FORCE AND ACCELERATION
 PLANAR KINETICS OF A RIGID BODY FORCE AND ACCELERATION I. Moment of Inertia: Since a body has a definite size and shape, an applied nonconcurrent force system may cause the body to both translate and rotate.
PLANAR KINETICS OF A RIGID BODY FORCE AND ACCELERATION I. Moment of Inertia: Since a body has a definite size and shape, an applied nonconcurrent force system may cause the body to both translate and rotate.
VALLIAMMAI ENGINEERING COLLEGE SRM NAGAR, KATTANKULATHUR DEPARTMENT OF MECHANICAL ENGINEERING
 VALLIAMMAI ENGINEERING COLLEGE SRM NAGAR, KATTANKULATHUR 603203 DEPARTMENT OF MECHANICAL ENGINEERING BRANCH: MECHANICAL YEAR / SEMESTER: I / II UNIT 1 PART- A 1. State Newton's three laws of motion? 2.
VALLIAMMAI ENGINEERING COLLEGE SRM NAGAR, KATTANKULATHUR 603203 DEPARTMENT OF MECHANICAL ENGINEERING BRANCH: MECHANICAL YEAR / SEMESTER: I / II UNIT 1 PART- A 1. State Newton's three laws of motion? 2.
1 The Lagrange Equations of Motion
 1 The Lagrange Equations of Motion 1.1 Introduction A knowledge of the rudiments of dynamics is essential to understanding structural dynamics. Thus this chapter reviews the basic theorems of dynamics
1 The Lagrange Equations of Motion 1.1 Introduction A knowledge of the rudiments of dynamics is essential to understanding structural dynamics. Thus this chapter reviews the basic theorems of dynamics
MECHANICS OF STRUCTURES SCI 1105 COURSE MATERIAL UNIT - I
 MECHANICS OF STRUCTURES SCI 1105 COURSE MATERIAL UNIT - I Engineering Mechanics Branch of science which deals with the behavior of a body with the state of rest or motion, subjected to the action of forces.
MECHANICS OF STRUCTURES SCI 1105 COURSE MATERIAL UNIT - I Engineering Mechanics Branch of science which deals with the behavior of a body with the state of rest or motion, subjected to the action of forces.
Mathematics 2203, Test 1 - Solutions
 Mathematics 220, Test 1 - Solutions F, 2010 Philippe B. Laval Name 1. Determine if each statement below is True or False. If it is true, explain why (cite theorem, rule, property). If it is false, explain
Mathematics 220, Test 1 - Solutions F, 2010 Philippe B. Laval Name 1. Determine if each statement below is True or False. If it is true, explain why (cite theorem, rule, property). If it is false, explain
Al-Saudia Virtual Academy Pakistan Online Tuition Online Tutor Pakistan
 Al-Saudia Virtual Academy Pakistan Online Tuition Online Tutor Pakistan Statics What do you mean by Resultant Force? Ans: Resultant Force: The sum of all forces acting upon a body is called Resultant Force.
Al-Saudia Virtual Academy Pakistan Online Tuition Online Tutor Pakistan Statics What do you mean by Resultant Force? Ans: Resultant Force: The sum of all forces acting upon a body is called Resultant Force.
Culminating Review for Vectors
 Culminating Review for Vectors 0011 0010 1010 1101 0001 0100 1011 An Introduction to Vectors Applications of Vectors Equations of Lines and Planes 4 12 Relationships between Points, Lines and Planes An
Culminating Review for Vectors 0011 0010 1010 1101 0001 0100 1011 An Introduction to Vectors Applications of Vectors Equations of Lines and Planes 4 12 Relationships between Points, Lines and Planes An
If the pull is downward (Fig. 1), we want C to point into the page. If the pull is upward (Fig. 2), we want C to point out of the page.
, we want C to point into the page. If the pull is upward (Fig. 2), we want C to point out of the page.") 11.5 Cross Product Contemporary Calculus 1 11.5 CROSS PRODUCT This section is the final one about the arithmetic of vectors, and it introduces a second type of vector vector multiplication called the cross
11.5 Cross Product Contemporary Calculus 1 11.5 CROSS PRODUCT This section is the final one about the arithmetic of vectors, and it introduces a second type of vector vector multiplication called the cross
11/13/2018. The Hall Effect. The Hall Effect. The Hall Effect. Consider a magnetic field perpendicular to a flat, currentcarrying
 The Hall Effect Consider a magnetic field perpendicular to a flat, currentcarrying conductor. As the charge carriers move at the drift speed v d, they will experience a magnetic force F B = ev d B perpendicular
The Hall Effect Consider a magnetic field perpendicular to a flat, currentcarrying conductor. As the charge carriers move at the drift speed v d, they will experience a magnetic force F B = ev d B perpendicular
Consider a magnetic field perpendicular to a flat, currentcarrying
 The Hall Effect Consider a magnetic field perpendicular to a flat, currentcarrying conductor. As the charge carriers move at the drift speed v d, they will experience a magnetic force F B = ev d B perpendicular
The Hall Effect Consider a magnetic field perpendicular to a flat, currentcarrying conductor. As the charge carriers move at the drift speed v d, they will experience a magnetic force F B = ev d B perpendicular
Vectors a vector is a quantity that has both a magnitude (size) and a direction
 and a direction") Vectors In physics, a vector is a quantity that has both a magnitude (size) and a direction. Familiar examples of vectors include velocity, force, and electric field. For any applications beyond one dimension,
Vectors In physics, a vector is a quantity that has both a magnitude (size) and a direction. Familiar examples of vectors include velocity, force, and electric field. For any applications beyond one dimension,
Equivalent Systems of Forces
 Equivalent Systems of orces Contents Introduction( 绪论 ) Vector Products of Two Vectors( 矢量积 ) Moment of a orce About a Point( 力对点的矩 ) Moment of a orce About a Given Axis( 力对轴的矩 ) Moment of a Couple( 力偶矩
Equivalent Systems of orces Contents Introduction( 绪论 ) Vector Products of Two Vectors( 矢量积 ) Moment of a orce About a Point( 力对点的矩 ) Moment of a orce About a Given Axis( 力对轴的矩 ) Moment of a Couple( 力偶矩
Statics and Vectors. ME 202 Topics. Statics. Engineering Mechanics
 Engineering Mechanics Statics and Vectors ME 202 Mechanical System: One whose behavior can be completely described in terms of force, mass, distance, time and temperature. Engineering mechanics: Branch
Engineering Mechanics Statics and Vectors ME 202 Mechanical System: One whose behavior can be completely described in terms of force, mass, distance, time and temperature. Engineering mechanics: Branch
12.5 Equations of Lines and Planes
 12.5 Equations of Lines and Planes Equation of Lines Vector Equation of Lines Parametric Equation of Lines Symmetric Equation of Lines Relation Between Two Lines Equations of Planes Vector Equation of
12.5 Equations of Lines and Planes Equation of Lines Vector Equation of Lines Parametric Equation of Lines Symmetric Equation of Lines Relation Between Two Lines Equations of Planes Vector Equation of
General Physics I, Spring Vectors
 General Physics I, Spring 2011 Vectors 1 Vectors: Introduction A vector quantity in physics is one that has a magnitude (absolute value) and a direction. We have seen three already: displacement, velocity,
General Physics I, Spring 2011 Vectors 1 Vectors: Introduction A vector quantity in physics is one that has a magnitude (absolute value) and a direction. We have seen three already: displacement, velocity,
2.1 Scalars and Vectors
 2.1 Scalars and Vectors Scalar A quantity characterized by a positive or negative number Indicated by letters in italic such as A e.g. Mass, volume and length 2.1 Scalars and Vectors Vector A quantity
2.1 Scalars and Vectors Scalar A quantity characterized by a positive or negative number Indicated by letters in italic such as A e.g. Mass, volume and length 2.1 Scalars and Vectors Vector A quantity
System of Linear Equations. Slide for MA1203 Business Mathematics II Week 1 & 2
 System of Linear Equations Slide for MA1203 Business Mathematics II Week 1 & 2 Function A manufacturer would like to know how his company s profit is related to its production level. How does one quantity
System of Linear Equations Slide for MA1203 Business Mathematics II Week 1 & 2 Function A manufacturer would like to know how his company s profit is related to its production level. How does one quantity
DEFINITION AND CLASSIFICATION OF FORCES
 DEINITION AND CLASSIICATION O ORCES As defined before, force is an action of one body on another. It is a vector quantity since its effect depends on the direction as well as on the magnitude of the action.
DEINITION AND CLASSIICATION O ORCES As defined before, force is an action of one body on another. It is a vector quantity since its effect depends on the direction as well as on the magnitude of the action.
7. FORCE ANALYSIS. Fundamentals F C
 ME 352 ORE NLYSIS 7. ORE NLYSIS his chapter discusses some of the methodologies used to perform force analysis on mechanisms. he chapter begins with a review of some fundamentals of force analysis using
ME 352 ORE NLYSIS 7. ORE NLYSIS his chapter discusses some of the methodologies used to perform force analysis on mechanisms. he chapter begins with a review of some fundamentals of force analysis using
PEMP-AML2506. Day 01B. Session Speaker Dr. M. D. Deshpande. M.S. Ramaiah School of Advanced Studies - Bangalore 1 01B
 AML2506 Biomechanics and Flow Simulation Day Review of fengineering i Mechanics Session Speaker Dr. M. D. Deshpande 1 Session Objectives At the end of this session the delegate would have understood Basic
AML2506 Biomechanics and Flow Simulation Day Review of fengineering i Mechanics Session Speaker Dr. M. D. Deshpande 1 Session Objectives At the end of this session the delegate would have understood Basic
Statics. Today Introductions Review Course Outline and Class Schedule Course Expectations Chapter 1 ENGR 1205 ENGR 1205
 Statics ENGR 1205 Kaitlin Ford kford@mtroyal.ca B175 Today Introductions Review Course Outline and Class Schedule Course Expectations Start Chapter 1 1 the goal of this course is to develop your ability
Statics ENGR 1205 Kaitlin Ford kford@mtroyal.ca B175 Today Introductions Review Course Outline and Class Schedule Course Expectations Start Chapter 1 1 the goal of this course is to develop your ability