Dr. Allen Back. Sep. 8, 2014
|
|
|
- Jocelin Marsh
- 5 years ago
- Views:
Transcription
1 in R 3 Dr. Allen Back Sep. 8, 2014
2 in R 3
3 in R 3 Def: For f (x, y), the partial derivative with respect to x at p 0 = (x 0, y 0 ) is f x = lim f (x 0 + h, y 0 ) f (x 0, y 0 ) h 0 h or f x = lim f (p 0 + he 1 ) f (p 0 ) h 0 h [ ] 1 where e 1 = is the first standard basis vector of R 0 2.[]
4 A Basic Application: f f x x + f y y. in R 3
5 Example: If the sides of a rectangle increase by 2% and 3%, approximately how much will the area increase? in R 3
6 A Basic Application: f f x x + f y y. in R 3 In the above, the terms more precisely are: f = f (x, y) f (x 0, y 0 ) x = x x 0 y = y y 0 f x = f x (x 0, y 0 ) f y = f y (x 0, y 0 )
7 in R 3 For f : U R n R m, we write f (p) = (f 1 (p), f 2 (p),... f m (p)) where each f i : U R n R is an ordinary real valued function called a component function of f.
8 in R 3 For example the polar coordinate formulas x = y = r cos θ r sin θ may be expressed in terms of the function f : R 2 R 2 defined by f (r, θ) = (r cos θ, r sin θ). (Specifically (x, y) = f (r, θ).) Here the first component function is and the second is f 1 (r, θ) = r cos θ f 2 (r, θ) = r sin θ.
9 Def: A linear transformation T is DF(p) if lim x p f (x) f (p) T (x p) x p = 0 in R 3
10 in R 3 Def: A linear transformation T is DF(p) if Compare to lim x p f (x) f (p) T (x p) x p f x which can be rewritten as = 0 f (p 0 + he 1 ) f (p 0 ) == lim h 0 h f (p 0 + he 1 ) f (p 0 ) hf x (p 0 ) lim = 0 h 0 h
11 Thm: If f : U R n R m is diff., then the entries of Df(p) must be the partial of the component functions of f. in R 3
12 in R 3 Thm: If f : U R n R m is diff., then the entries of Df(p) must be the partial of the component functions of f. So for f : R n R m, the matrix T = Df (p 0 ) will be m n. One row for each component function. The row i col j entry will be f i x j.
13 in R 3 Def: A linear transformation T is DF(p) if lim x p f (x) f (p) T (x p) x p = 0 Thm: If f : U R n R m is diff., then the entries of Df(p) must be the partial of the component functions of f. Problem: f (r, θ) = (r cos θ, r sin θ). Find the derivative.
14 in R 3 Def: A linear transformation T is DF(p) if lim x p f (x) f (p) T (x p) x p = 0 Thm: If f : U R n R m is diff., then the entries of Df(p) must be the partial of the component functions of f. Why?
15 First remember from linear algebra, that for an m n matrix T, the i th column of T is where e i is mapped by Y ; i.e. Te i. in R 3
16 If the limit exists, restrict x = p + te i to lie on a line through p in the direction of the i th standard basis vector e i. in R 3
17 in R 3 If the limit exists, restrict x = p + te i to lie on a line through p in the direction of the i th standard basis vector e i. Then f (p + te i ) f (p) lim t 0 + = Te i t showing that the i th column of T consists of the i th partial of the component functions of f.
18 Thm: If f is differentiable at p 0 then it is continuous there. in R 3
19 Thm: If the partial of f : U R n R exist and are continuous in a neighborhood of p 0 U, then f is differentiable at p 0. in R 3
20 Thm: A function f : U R n R m is differentiable at p 0 if and only each of its component functions f i : U R n R is. (Recall f = (f 1,..., f m ).) in R 3
21 in R 3 The chain rule in multivariable calculus is in some ways very simple. But it can lead to extremely intricate sorts of relationships (try thermodynamics in physical chemistry... ) as well as counter-intuitive looking formulas like z y x = x. z y (The above in a context where f (x, y, z) = C.)
22 First let s try the conceptually simple point of view, using the fact that of functions are linear transformations. (Matrices.) in R 3
23 in R 3 Think about differentiable functions and g : U R n R m f : V R m R p where the image of f (f (U)) is a subset of the domain V of g. The chain rule is about the derivative of the composition f g.
24 Here s a picture: in R 3
25 in R 3 For g : U R n R m and f : V R m R p, let s use p to denote a point of R n q to denote a point of R m r to denote a point of R p. So more colloquially, we might write q = r = g(p) f (q) and so of course f g gives the relationship r = f (g(p)). (The latter is (f g)(p).)
26 in R 3 Fix a point p 0 with g(p 0 ) = q 0 and f (q 0 ) = r 0. Let the of g and f at the relevant points be T = Dg(p 0 ) S = Df (q 0 ). How are the changes in p, q, and r related?
27 in R 3 Fix a point p 0 with g(p 0 ) = q 0 and f (q 0 ) = r 0. Let the of g and f at the relevant points be T = Dg(p 0 ) S = Df (q 0 ). How are the changes in p, q, and r related? By the linear approximation properties of the derivative, q T p r S q And so plugging the first approximate equality into the second gives the approximation r S(T p) = (ST ) p.
28 r (ST ) p. in R 3 What is this saying?
29 in R 3 r (ST ) p. What is this saying? For g : U R n R m and f : V R m R p, T = Df (p 0 ) is an m n matrix S = Dg(q 0 ) is an p m matrix So the product ST is a p n matrix representing the derivative at p 0 of g f.
30 So the chain rule theorem says that if f is differentiable at p 0 with f (p 0 ) = q 0 and g is differentiable at q 0, then g f is also differentiable at p 0 with derivative the matrix product (Dg(q 0 )) (Df (p 0 )). in R 3
31 in R 3 Problem: Suppose we have the polar coordinate map g(r, θ) = (r cos θ, r sin θ) and (r, θ) = f (u, v) is given by f (u, v) = (uv, v). Find the derivative of g f.
32 f : U R 2 R and g : U R R 2. Derivatives/ of f g and g f? in R 3
33 Tree diagrams for chain rule applications. in R 3
34 Cases like f (x, u(x, y), v(y)). in R 3
35 The tangent plane to the graph of z = f (x, y) at (x, y) = (x 0, y 0 ) is defined to be the plane given by z z 0 = f x (x 0, y 0 )(x x 0 ) + f y (x 0, y 0 )(y y 0 ). in R 3 (The approximation z f x x + f y y is replaced by an exact equality on the tangent plane.)

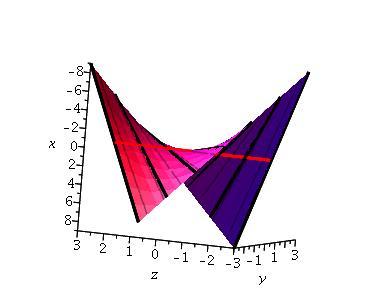
36 plane to z = x 2 y 2 at ( 1, 0, 1). in R 3 Note the tangent plane needn t meet the surface in just one point.
37 in R 3 in R 3
38 in R 3 in R 3 If the normal n =< a, b, c >, r =< x, y, z > is a general point and P 0 = (x 0, y 0, z 0 ), then n ( r P 0 ) = 0 becomes a(x x 0 ) + b(y y 0 ) + c(z z 0 ) = 0.
39 in R 3 in R 3 Find the equation of the plane through the three points P 0 = (1, 0, 1), P 1 = ( 1, 1, 2) and P 2 = (1, 2, 3).
40 in R 3 in R 3 Find the equation of the plane through the three points P 0 = (1, 0, 1), P 1 = ( 1, 1, 2) and P 2 = (1, 2, 3). Solution: First find the normal n = P 0 P 1 P 0 P 2
41 in R 3 Find the equation of the plane through the three points P 0 = (1, 0, 1), P 1 = ( 1, 1, 2) and P 2 = (1, 2, 3). Solution: First find the normal n = P 0 P 1 P 0 P 2 in R 3 The cross product: which is î ĵ ˆk
42 in R 3 Find the equation of the plane through the three points P 0 = (1, 0, 1), P 1 = ( 1, 1, 2) and P 2 = (1, 2, 3). Solution: First find the normal n = P 0 P 1 P 0 P 2 in R 3 The cross product: î ĵ ˆk which is î ĵ ˆk =< 0, 4, 4 >.
43 in R 3 in R 3 Find the equation of the plane through the three points P 0 = (1, 0, 1), P 1 = ( 1, 1, 2) and P 2 = (1, 2, 3). î ĵ ˆk =< 0, 4, 4 >. So our plane is < 0, 4, 4 > ( r < 1, 0, 1 >) = 0
44 in R 3 Find the equation of the plane through the three points P 0 = (1, 0, 1), P 1 = ( 1, 1, 2) and P 2 = (1, 2, 3). So our plane is < 0, 4, 4 > ( r < 1, 0, 1 >) = 0 in R 3 or 0(x 1) + 4(y 0) 4(z 1) = 0 or 4y 4z + 4 = 0.
45 in R 3
46 in R 3 Find the equation of the line through the points P 0 = (1, 1, 0) and P 1 = (2, 2, 2).
47 Find the equation of the line through the points P 0 = (1, 1, 0) and P 1 = (2, 2, 2). in R 3
48 Find the equation of the line through the points P 0 = (1, 1, 0) and P 1 = (2, 2, 2). in R 3 Solution: P 0 P 1 = (2, 2, 2) (1, 1, 0) =< 1, 1, 2 >. So our line is r =< 1, 1, 0 > +t < 1, 1, 2 >=< 1 + t, 1 + t, 2t >. where t is any real number.
49 in R 3 Solution: P 0 P 1 = (2, 2, 2) (1, 1, 0) =< 1, 1, 2 >. So our line is r =< 1, 1, 0 > +t < 1, 1, 2 >=< 1 + t, 1 + t, 2t >. where t is any real number. This is called the vector form of the equation of a line.
50 in R 3 Solution: P 0 P 1 = (2, 2, 2) (1, 1, 0) =< 1, 1, 2 >. So our line is r =< 1, 1, 0 > +t < 1, 1, 2 >=< 1 + t, 1 + t, 2t >. where t is any real number. This is called the vector form of the equation of a line. Thinking our general position vector r =< x, y, z >, we can express this as the parametric form: x = y = z = 1 + t 1 + t 2t
51 Thinking our general position vector r =< x, y, z >, we can express this as the parametric form: x = y = z = 1 + t 1 + t 2t in R 3 Solving for t shows t = x 1 = y 1 = z 2 which realizes this line as the intersection of the planes x = y and z = 2(y 1) but there are many other pairs of planes containing this line.
52 The cross product of vectors in R 3 is another vector. in R 3
53 in R 3 The cross product of vectors in R 3 is another vector. It is good because: it is geometrically meaningful it is straightforward to calculate it is useful (e.g. torque, angular momentum)
54 in R 3 The cross product of vectors in R 3 is another vector. u = v w is geometrically determined by the properties: u is perpendicular to both v and w. u is the v w sin θ, the area of the parallelogram spanned by v and w. Choice from the remaining two possibilities is now made based on the right hand rule.
55 u = v w is geometrically determined by the properties: u is perpendicular to both v and w. u is the v w sin θ, the area of the parallelogram spanned by v and w. Choice from the remaining two possibilities is now made based on the right hand rule. in R 3

56 in R 3 u = v w is geometrically determined by the properties: u is perpendicular to both v and w. u is the v w sin θ, the area of the parallelogram spanned by v and w. Choice from the remaining two possibilities is now made based on the right hand rule.
57 u = v w is geometrically determined by the properties: u is perpendicular to both v and w. u is the v w sin θ, the area of the parallelogram spanned by v and w. Choice from the remaining two possibilities is now made based on the right hand rule. in R 3
58 in R 3 The algebraic definition of the cross product is based on the determinant î ĵ ˆk v w = v 1 v 2 v 3 w 1 w 2 w 3 which means v w = î v 2 v 3 w 2 w 3 ĵ v 1 v 3 w 1 w 3 + ˆk v 1 v 2 w 1 w 2. where a b c d = ad bc and î =< 1, 0, 0 >, ĵ =< 0, 1, 0 >, and ˆk =< 0, 0, 1 >,
59 v w = w v in R 3
60 Since î ĵ = ˆk and cyclic (so ĵ ˆk = î and ˆk î = ĵ) it is sometimes easiest to use that algebra or comparison with the picture below to determine cross products or use the right hand rule. in R 3
61 in R 3 For example < 1, 1, 0 > < 0, 0, 1 >= (î + ĵ) ˆk = ĵ + î =< 1, 1, 0 > is easier than writing out the 3 3 determinant.
62 in R 3 s can be used to find the area of a parallelogram or triangle spanned by two vectors in R 3. find the volume of a parallelopiped using the scalar triple product u ( v w) = ( u v) w.
Dr. Allen Back. Sep. 10, 2014
 Dr. Allen Back Sep. 10, 2014 The chain rule in multivariable calculus is in some ways very simple. But it can lead to extremely intricate sorts of relationships (try thermodynamics in physical chemistry...
Dr. Allen Back Sep. 10, 2014 The chain rule in multivariable calculus is in some ways very simple. But it can lead to extremely intricate sorts of relationships (try thermodynamics in physical chemistry...
Worksheet 1.4: Geometry of the Dot and Cross Products
 Boise State Math 275 (Ultman) Worksheet 1.4: Geometry of the Dot and Cross Products From the Toolbox (what you need from previous classes): Basic algebra and trigonometry: be able to solve quadratic equations,
Boise State Math 275 (Ultman) Worksheet 1.4: Geometry of the Dot and Cross Products From the Toolbox (what you need from previous classes): Basic algebra and trigonometry: be able to solve quadratic equations,
(arrows denote positive direction)
") 12 Chapter 12 12.1 3-dimensional Coordinate System The 3-dimensional coordinate system we use are coordinates on R 3. The coordinate is presented as a triple of numbers: (a,b,c). In the Cartesian coordinate
12 Chapter 12 12.1 3-dimensional Coordinate System The 3-dimensional coordinate system we use are coordinates on R 3. The coordinate is presented as a triple of numbers: (a,b,c). In the Cartesian coordinate
Worksheet 1.3: Introduction to the Dot and Cross Products
 Boise State Math 275 (Ultman Worksheet 1.3: Introduction to the Dot and Cross Products From the Toolbox (what you need from previous classes Trigonometry: Sine and cosine functions. Vectors: Know what
Boise State Math 275 (Ultman Worksheet 1.3: Introduction to the Dot and Cross Products From the Toolbox (what you need from previous classes Trigonometry: Sine and cosine functions. Vectors: Know what
The Calculus of Vec- tors
 Physics 2460 Electricity and Magnetism I, Fall 2007, Lecture 3 1 The Calculus of Vec- Summary: tors 1. Calculus of Vectors: Limits and Derivatives 2. Parametric representation of Curves r(t) = [x(t), y(t),
Physics 2460 Electricity and Magnetism I, Fall 2007, Lecture 3 1 The Calculus of Vec- Summary: tors 1. Calculus of Vectors: Limits and Derivatives 2. Parametric representation of Curves r(t) = [x(t), y(t),
The Cross Product The cross product of v = (v 1,v 2,v 3 ) and w = (w 1,w 2,w 3 ) is
 and w = (w 1,w 2,w 3 ) is") The Cross Product 1-1-2018 The cross product of v = (v 1,v 2,v 3 ) and w = (w 1,w 2,w 3 ) is v w = (v 2 w 3 v 3 w 2 )î+(v 3 w 1 v 1 w 3 )ĵ+(v 1 w 2 v 2 w 1 )ˆk = v 1 v 2 v 3 w 1 w 2 w 3. Strictly speaking,
The Cross Product 1-1-2018 The cross product of v = (v 1,v 2,v 3 ) and w = (w 1,w 2,w 3 ) is v w = (v 2 w 3 v 3 w 2 )î+(v 3 w 1 v 1 w 3 )ĵ+(v 1 w 2 v 2 w 1 )ˆk = v 1 v 2 v 3 w 1 w 2 w 3. Strictly speaking,
Math 276, Spring 2007 Additional Notes on Vectors
 Math 276, Spring 2007 Additional Notes on Vectors 1.1. Real Vectors. 1. Scalar Products If x = (x 1,..., x n ) is a vector in R n then the length of x is x = x 2 1 + + x2 n. We sometimes use the notation
Math 276, Spring 2007 Additional Notes on Vectors 1.1. Real Vectors. 1. Scalar Products If x = (x 1,..., x n ) is a vector in R n then the length of x is x = x 2 1 + + x2 n. We sometimes use the notation
Solutions to Selected Questions from Denis Sevee s Vector Geometry. (Updated )
") Solutions to Selected Questions from Denis Sevee s Vector Geometry. (Updated 24--27) Denis Sevee s Vector Geometry notes appear as Chapter 5 in the current custom textbook used at John Abbott College for
Solutions to Selected Questions from Denis Sevee s Vector Geometry. (Updated 24--27) Denis Sevee s Vector Geometry notes appear as Chapter 5 in the current custom textbook used at John Abbott College for
Chapter 2 - Vector Algebra
 A spatial vector, or simply vector, is a concept characterized by a magnitude and a direction, and which sums with other vectors according to the Parallelogram Law. A vector can be thought of as an arrow
A spatial vector, or simply vector, is a concept characterized by a magnitude and a direction, and which sums with other vectors according to the Parallelogram Law. A vector can be thought of as an arrow
Study guide for Exam 1. by William H. Meeks III October 26, 2012
 Study guide for Exam 1. by William H. Meeks III October 2, 2012 1 Basics. First we cover the basic definitions and then we go over related problems. Note that the material for the actual midterm may include
Study guide for Exam 1. by William H. Meeks III October 2, 2012 1 Basics. First we cover the basic definitions and then we go over related problems. Note that the material for the actual midterm may include
Vector Algebra August 2013
 Vector Algebra 12.1 12.2 28 August 2013 What is a Vector? A vector (denoted or v) is a mathematical object possessing both: direction and magnitude also called length (denoted ). Vectors are often represented
Vector Algebra 12.1 12.2 28 August 2013 What is a Vector? A vector (denoted or v) is a mathematical object possessing both: direction and magnitude also called length (denoted ). Vectors are often represented
Matrices. A matrix is a method of writing a set of numbers using rows and columns. Cells in a matrix can be referenced in the form.
 Matrices A matrix is a method of writing a set of numbers using rows and columns. 1 2 3 4 3 2 1 5 7 2 5 4 2 0 5 10 12 8 4 9 25 30 1 1 Reading Information from a Matrix Cells in a matrix can be referenced
Matrices A matrix is a method of writing a set of numbers using rows and columns. 1 2 3 4 3 2 1 5 7 2 5 4 2 0 5 10 12 8 4 9 25 30 1 1 Reading Information from a Matrix Cells in a matrix can be referenced
The Cross Product. In this section, we will learn about: Cross products of vectors and their applications.
 The Cross Product In this section, we will learn about: Cross products of vectors and their applications. THE CROSS PRODUCT The cross product a x b of two vectors a and b, unlike the dot product, is a
The Cross Product In this section, we will learn about: Cross products of vectors and their applications. THE CROSS PRODUCT The cross product a x b of two vectors a and b, unlike the dot product, is a
MATH 12 CLASS 5 NOTES, SEP
 MATH 12 CLASS 5 NOTES, SEP 30 2011 Contents 1. Vector-valued functions 1 2. Differentiating and integrating vector-valued functions 3 3. Velocity and Acceleration 4 Over the past two weeks we have developed
MATH 12 CLASS 5 NOTES, SEP 30 2011 Contents 1. Vector-valued functions 1 2. Differentiating and integrating vector-valued functions 3 3. Velocity and Acceleration 4 Over the past two weeks we have developed
Vectors, dot product, and cross product
 MTH 201 Multivariable calculus and differential equations Practice problems Vectors, dot product, and cross product 1. Find the component form and length of vector P Q with the following initial point
MTH 201 Multivariable calculus and differential equations Practice problems Vectors, dot product, and cross product 1. Find the component form and length of vector P Q with the following initial point
(1) Recap of Differential Calculus and Integral Calculus (2) Preview of Calculus in three dimensional space (3) Tools for Calculus 3
 Recap of Differential Calculus and Integral Calculus (2) Preview of Calculus in three dimensional space (3) Tools for Calculus 3") Math 127 Introduction and Review (1) Recap of Differential Calculus and Integral Calculus (2) Preview of Calculus in three dimensional space (3) Tools for Calculus 3 MATH 127 Introduction to Calculus III
Math 127 Introduction and Review (1) Recap of Differential Calculus and Integral Calculus (2) Preview of Calculus in three dimensional space (3) Tools for Calculus 3 MATH 127 Introduction to Calculus III
Chapter 6: Vector Analysis
 Chapter 6: Vector Analysis We use derivatives and various products of vectors in all areas of physics. For example, Newton s 2nd law is F = m d2 r. In electricity dt 2 and magnetism, we need surface and
Chapter 6: Vector Analysis We use derivatives and various products of vectors in all areas of physics. For example, Newton s 2nd law is F = m d2 r. In electricity dt 2 and magnetism, we need surface and
mathematical objects can be described via equations, functions, graphs, parameterization in R, R, and R.
 Multivariable Calculus Lecture # Notes This lecture completes the discussion of the cross product in R and addresses the variety of different ways that n mathematical objects can be described via equations,
Multivariable Calculus Lecture # Notes This lecture completes the discussion of the cross product in R and addresses the variety of different ways that n mathematical objects can be described via equations,
Course Notes Math 275 Boise State University. Shari Ultman
 Course Notes Math 275 Boise State University Shari Ultman Fall 2017 Contents 1 Vectors 1 1.1 Introduction to 3-Space & Vectors.............. 3 1.2 Working With Vectors.................... 7 1.3 Introduction
Course Notes Math 275 Boise State University Shari Ultman Fall 2017 Contents 1 Vectors 1 1.1 Introduction to 3-Space & Vectors.............. 3 1.2 Working With Vectors.................... 7 1.3 Introduction
Vectors. J.R. Wilson. September 27, 2018
 Vectors J.R. Wilson September 27, 2018 This chapter introduces vectors that are used in many areas of physics (needed for classical physics this year). One complication is that a number of different forms
Vectors J.R. Wilson September 27, 2018 This chapter introduces vectors that are used in many areas of physics (needed for classical physics this year). One complication is that a number of different forms
The Cross Product. MATH 311, Calculus III. J. Robert Buchanan. Fall Department of Mathematics. J. Robert Buchanan The Cross Product
 The Cross Product MATH 311, Calculus III J. Robert Buchanan Department of Mathematics Fall 2011 Introduction Recall: the dot product of two vectors is a scalar. There is another binary operation on vectors
The Cross Product MATH 311, Calculus III J. Robert Buchanan Department of Mathematics Fall 2011 Introduction Recall: the dot product of two vectors is a scalar. There is another binary operation on vectors
The Cross Product. Philippe B. Laval. Spring 2012 KSU. Philippe B. Laval (KSU) The Cross Product Spring /
 The Cross Product Spring /") The Cross Product Philippe B Laval KSU Spring 2012 Philippe B Laval (KSU) The Cross Product Spring 2012 1 / 15 Introduction The cross product is the second multiplication operation between vectors we will
The Cross Product Philippe B Laval KSU Spring 2012 Philippe B Laval (KSU) The Cross Product Spring 2012 1 / 15 Introduction The cross product is the second multiplication operation between vectors we will
Topic 5.2: Introduction to Vector Fields
 Math 75 Notes Topic 5.: Introduction to Vector Fields Tetbook Section: 16.1 From the Toolbo (what you need from previous classes): Know what a vector is. Be able to sketch a vector using its component
Math 75 Notes Topic 5.: Introduction to Vector Fields Tetbook Section: 16.1 From the Toolbo (what you need from previous classes): Know what a vector is. Be able to sketch a vector using its component
If the pull is downward (Fig. 1), we want C to point into the page. If the pull is upward (Fig. 2), we want C to point out of the page.
, we want C to point into the page. If the pull is upward (Fig. 2), we want C to point out of the page.") 11.5 Cross Product Contemporary Calculus 1 11.5 CROSS PRODUCT This section is the final one about the arithmetic of vectors, and it introduces a second type of vector vector multiplication called the cross
11.5 Cross Product Contemporary Calculus 1 11.5 CROSS PRODUCT This section is the final one about the arithmetic of vectors, and it introduces a second type of vector vector multiplication called the cross
Sections 6.1 and 6.2: Systems of Linear Equations
 What is a linear equation? Sections 6.1 and 6.2: Systems of Linear Equations We are now going to discuss solving systems of two or more linear equations with two variables. Recall that solving an equation
What is a linear equation? Sections 6.1 and 6.2: Systems of Linear Equations We are now going to discuss solving systems of two or more linear equations with two variables. Recall that solving an equation
Problem 1: (3 points) Recall that the dot product of two vectors in R 3 is
 Recall that the dot product of two vectors in R 3 is") Linear Algebra, Spring 206 Homework 3 Name: Problem : (3 points) Recall that the dot product of two vectors in R 3 is a x b y = ax + by + cz, c z and this is essentially the same as the matrix multiplication
Linear Algebra, Spring 206 Homework 3 Name: Problem : (3 points) Recall that the dot product of two vectors in R 3 is a x b y = ax + by + cz, c z and this is essentially the same as the matrix multiplication
Vectors. J.R. Wilson. September 28, 2017
 Vectors J.R. Wilson September 28, 2017 This chapter introduces vectors that are used in many areas of physics (needed for classical physics this year). One complication is that a number of different forms
Vectors J.R. Wilson September 28, 2017 This chapter introduces vectors that are used in many areas of physics (needed for classical physics this year). One complication is that a number of different forms
Vectors. September 2, 2015
 Vectors September 2, 2015 Our basic notion of a vector is as a displacement, directed from one point of Euclidean space to another, and therefore having direction and magnitude. We will write vectors in
Vectors September 2, 2015 Our basic notion of a vector is as a displacement, directed from one point of Euclidean space to another, and therefore having direction and magnitude. We will write vectors in
Math 3C Lecture 20. John Douglas Moore
 Math 3C Lecture 20 John Douglas Moore May 18, 2009 TENTATIVE FORMULA I Midterm I: 20% Midterm II: 20% Homework: 10% Quizzes: 10% Final: 40% TENTATIVE FORMULA II Higher of two midterms: 30% Homework: 10%
Math 3C Lecture 20 John Douglas Moore May 18, 2009 TENTATIVE FORMULA I Midterm I: 20% Midterm II: 20% Homework: 10% Quizzes: 10% Final: 40% TENTATIVE FORMULA II Higher of two midterms: 30% Homework: 10%
Linear Equation: a 1 x 1 + a 2 x a n x n = b. x 1, x 2,..., x n : variables or unknowns
 Linear Equation: a x + a 2 x 2 +... + a n x n = b. x, x 2,..., x n : variables or unknowns a, a 2,..., a n : coefficients b: constant term Examples: x + 4 2 y + (2 5)z = is linear. x 2 + y + yz = 2 is
Linear Equation: a x + a 2 x 2 +... + a n x n = b. x, x 2,..., x n : variables or unknowns a, a 2,..., a n : coefficients b: constant term Examples: x + 4 2 y + (2 5)z = is linear. x 2 + y + yz = 2 is
CHAPTER 4 VECTORS. Before we go any further, we must talk about vectors. They are such a useful tool for
 CHAPTER 4 VECTORS Before we go any further, we must talk about vectors. They are such a useful tool for the things to come. The concept of a vector is deeply rooted in the understanding of physical mechanics
CHAPTER 4 VECTORS Before we go any further, we must talk about vectors. They are such a useful tool for the things to come. The concept of a vector is deeply rooted in the understanding of physical mechanics
Topic 5.6: Surfaces and Surface Elements
 Math 275 Notes Topic 5.6: Surfaces and Surface Elements Textbook Section: 16.6 From the Toolbox (what you need from previous classes): Using vector valued functions to parametrize curves. Derivatives of
Math 275 Notes Topic 5.6: Surfaces and Surface Elements Textbook Section: 16.6 From the Toolbox (what you need from previous classes): Using vector valued functions to parametrize curves. Derivatives of
MATH 1020 WORKSHEET 12.1 & 12.2 Vectors in the Plane
 MATH 100 WORKSHEET 1.1 & 1. Vectors in the Plane Find the vector v where u =, 1 and w = 1, given the equation v = u w. Solution. v = u w =, 1 1, =, 1 +, 4 =, 1 4 = 0, 5 Find the magnitude of v = 4, 3 Solution.
MATH 100 WORKSHEET 1.1 & 1. Vectors in the Plane Find the vector v where u =, 1 and w = 1, given the equation v = u w. Solution. v = u w =, 1 1, =, 1 +, 4 =, 1 4 = 0, 5 Find the magnitude of v = 4, 3 Solution.
Math 302 Outcome Statements Winter 2013
 Math 302 Outcome Statements Winter 2013 1 Rectangular Space Coordinates; Vectors in the Three-Dimensional Space (a) Cartesian coordinates of a point (b) sphere (c) symmetry about a point, a line, and a
Math 302 Outcome Statements Winter 2013 1 Rectangular Space Coordinates; Vectors in the Three-Dimensional Space (a) Cartesian coordinates of a point (b) sphere (c) symmetry about a point, a line, and a
Math 241, Exam 1 Information.
 Math 241, Exam 1 Information. 2/13/13, LC 310, 11:15-12:05. Exam 1 will be based on: Sections 12.1-12.5, 14.2. The corresponding assigned homework problems (see http://www.math.sc.edu/ boylan/sccourses/241sp13/241.html)
Math 241, Exam 1 Information. 2/13/13, LC 310, 11:15-12:05. Exam 1 will be based on: Sections 12.1-12.5, 14.2. The corresponding assigned homework problems (see http://www.math.sc.edu/ boylan/sccourses/241sp13/241.html)
D(f/g)(P ) = D(f)(P )g(p ) f(p )D(g)(P ). g 2 (P )
(P ) = D(f)(P )g(p ) f(p )D(g)(P ). g 2 (P )") We first record a very useful: 11. Higher derivatives Theorem 11.1. Let A R n be an open subset. Let f : A R m and g : A R m be two functions and suppose that P A. Let λ A be a scalar. If f and g are differentiable
We first record a very useful: 11. Higher derivatives Theorem 11.1. Let A R n be an open subset. Let f : A R m and g : A R m be two functions and suppose that P A. Let λ A be a scalar. If f and g are differentiable
1.1 Single Variable Calculus versus Multivariable Calculus Rectangular Coordinate Systems... 4
 MATH2202 Notebook 1 Fall 2015/2016 prepared by Professor Jenny Baglivo Contents 1 MATH2202 Notebook 1 3 1.1 Single Variable Calculus versus Multivariable Calculus................... 3 1.2 Rectangular Coordinate
MATH2202 Notebook 1 Fall 2015/2016 prepared by Professor Jenny Baglivo Contents 1 MATH2202 Notebook 1 3 1.1 Single Variable Calculus versus Multivariable Calculus................... 3 1.2 Rectangular Coordinate
What you will learn today
 What you will learn today The Dot Product Equations of Vectors and the Geometry of Space 1/29 Direction angles and Direction cosines Projections Definitions: 1. a : a 1, a 2, a 3, b : b 1, b 2, b 3, a
What you will learn today The Dot Product Equations of Vectors and the Geometry of Space 1/29 Direction angles and Direction cosines Projections Definitions: 1. a : a 1, a 2, a 3, b : b 1, b 2, b 3, a
Remark 3.2. The cross product only makes sense in R 3.
 3. Cross product Definition 3.1. Let v and w be two vectors in R 3. The cross product of v and w, denoted v w, is the vector defined as follows: the length of v w is the area of the parallelogram with
3. Cross product Definition 3.1. Let v and w be two vectors in R 3. The cross product of v and w, denoted v w, is the vector defined as follows: the length of v w is the area of the parallelogram with
Math Vector Calculus II
 Math 255 - Vector Calculus II Review Notes Vectors We assume the reader is familiar with all the basic concepts regarding vectors and vector arithmetic, such as addition/subtraction of vectors in R n,
Math 255 - Vector Calculus II Review Notes Vectors We assume the reader is familiar with all the basic concepts regarding vectors and vector arithmetic, such as addition/subtraction of vectors in R n,
CURRENT MATERIAL: Vector Calculus.
 Math 275, section 002 (Ultman) Spring 2012 FINAL EXAM REVIEW The final exam will be held on Wednesday 9 May from 8:00 10:00am in our regular classroom. You will be allowed both sides of two 8.5 11 sheets
Math 275, section 002 (Ultman) Spring 2012 FINAL EXAM REVIEW The final exam will be held on Wednesday 9 May from 8:00 10:00am in our regular classroom. You will be allowed both sides of two 8.5 11 sheets
Name: ID: Math 233 Exam 1. Page 1
 Page 1 Name: ID: This exam has 20 multiple choice questions, worth 5 points each. You are allowed to use a scientific calculator and a 3 5 inch note card. 1. Which of the following pairs of vectors are
Page 1 Name: ID: This exam has 20 multiple choice questions, worth 5 points each. You are allowed to use a scientific calculator and a 3 5 inch note card. 1. Which of the following pairs of vectors are
Math 234. What you should know on day one. August 28, You should be able to use general principles like. x = cos t, y = sin t, 0 t π.
 Math 234 What you should know on day one August 28, 2001 1 You should be able to use general principles like Length = ds, Area = da, Volume = dv For example the length of the semi circle x = cos t, y =
Math 234 What you should know on day one August 28, 2001 1 You should be able to use general principles like Length = ds, Area = da, Volume = dv For example the length of the semi circle x = cos t, y =
Math 210, Exam 1, Practice Fall 2009 Problem 1 Solution
 Math 20, Exam, Practice Fall 2009 Problem Solution. Let A = (,,2), B = (0,,), C = (2,,). (a) Find the vector equation of the plane through A, B, C. (b) Find the area of the triangle with these three vertices.
Math 20, Exam, Practice Fall 2009 Problem Solution. Let A = (,,2), B = (0,,), C = (2,,). (a) Find the vector equation of the plane through A, B, C. (b) Find the area of the triangle with these three vertices.
Culminating Review for Vectors
 Culminating Review for Vectors 0011 0010 1010 1101 0001 0100 1011 An Introduction to Vectors Applications of Vectors Equations of Lines and Planes 4 12 Relationships between Points, Lines and Planes An
Culminating Review for Vectors 0011 0010 1010 1101 0001 0100 1011 An Introduction to Vectors Applications of Vectors Equations of Lines and Planes 4 12 Relationships between Points, Lines and Planes An
MATH 423/ Note that the algebraic operations on the right hand side are vector subtraction and scalar multiplication.
 MATH 423/673 1 Curves Definition: The velocity vector of a curve α : I R 3 at time t is the tangent vector to R 3 at α(t), defined by α (t) T α(t) R 3 α α(t + h) α(t) (t) := lim h 0 h Note that the algebraic
MATH 423/673 1 Curves Definition: The velocity vector of a curve α : I R 3 at time t is the tangent vector to R 3 at α(t), defined by α (t) T α(t) R 3 α α(t + h) α(t) (t) := lim h 0 h Note that the algebraic
3.3.1 Linear functions yet again and dot product In 2D, a homogenous linear scalar function takes the general form:
 3.3 Gradient Vector and Jacobian Matri 3 3.3 Gradient Vector and Jacobian Matri Overview: Differentiable functions have a local linear approimation. Near a given point, local changes are determined by
3.3 Gradient Vector and Jacobian Matri 3 3.3 Gradient Vector and Jacobian Matri Overview: Differentiable functions have a local linear approimation. Near a given point, local changes are determined by
12.5 Equations of Lines and Planes
 12.5 Equations of Lines and Planes Equation of Lines Vector Equation of Lines Parametric Equation of Lines Symmetric Equation of Lines Relation Between Two Lines Equations of Planes Vector Equation of
12.5 Equations of Lines and Planes Equation of Lines Vector Equation of Lines Parametric Equation of Lines Symmetric Equation of Lines Relation Between Two Lines Equations of Planes Vector Equation of
Notes on multivariable calculus
 Notes on multivariable calculus Jonathan Wise February 2, 2010 1 Review of trigonometry Trigonometry is essentially the study of the relationship between polar coordinates and Cartesian coordinates in
Notes on multivariable calculus Jonathan Wise February 2, 2010 1 Review of trigonometry Trigonometry is essentially the study of the relationship between polar coordinates and Cartesian coordinates in
Topic 2-2: Derivatives of Vector Functions. Textbook: Section 13.2, 13.4
 Topic 2-2: Derivatives of Vector Functions Textbook: Section 13.2, 13.4 Warm-Up: Parametrization of Circles Each of the following vector functions describe the position of an object traveling around the
Topic 2-2: Derivatives of Vector Functions Textbook: Section 13.2, 13.4 Warm-Up: Parametrization of Circles Each of the following vector functions describe the position of an object traveling around the
MATH 2331 Linear Algebra. Section 1.1 Systems of Linear Equations. Finding the solution to a set of two equations in two variables: Example 1: Solve:
 MATH 2331 Linear Algebra Section 1.1 Systems of Linear Equations Finding the solution to a set of two equations in two variables: Example 1: Solve: x x = 3 1 2 2x + 4x = 12 1 2 Geometric meaning: Do these
MATH 2331 Linear Algebra Section 1.1 Systems of Linear Equations Finding the solution to a set of two equations in two variables: Example 1: Solve: x x = 3 1 2 2x + 4x = 12 1 2 Geometric meaning: Do these
4.1 Distance and Length
 Chapter Vector Geometry In this chapter we will look more closely at certain geometric aspects of vectors in R n. We will first develop an intuitive understanding of some basic concepts by looking at vectors
Chapter Vector Geometry In this chapter we will look more closely at certain geometric aspects of vectors in R n. We will first develop an intuitive understanding of some basic concepts by looking at vectors
Problem Set 1: Solutions 2
 UNIVERSITY OF ALABAMA Department of Physics and Astronomy PH 125 / LeClair Spring 2009 Problems due 15 January 2009. Problem Set 1: Solutions 2 1. A person walks in the following pattern: 3.1 km north,
UNIVERSITY OF ALABAMA Department of Physics and Astronomy PH 125 / LeClair Spring 2009 Problems due 15 January 2009. Problem Set 1: Solutions 2 1. A person walks in the following pattern: 3.1 km north,
Midterm 1 Review. Distance = (x 1 x 0 ) 2 + (y 1 y 0 ) 2.
 2 + (y 1 y 0 ) 2.") Midterm 1 Review Comments about the midterm The midterm will consist of five questions and will test on material from the first seven lectures the material given below. No calculus either single variable
Midterm 1 Review Comments about the midterm The midterm will consist of five questions and will test on material from the first seven lectures the material given below. No calculus either single variable
6.5 Trigonometric Equations
 6. Trigonometric Equations In this section, we discuss conditional trigonometric equations, that is, equations involving trigonometric functions that are satisfied only by some values of the variable (or
6. Trigonometric Equations In this section, we discuss conditional trigonometric equations, that is, equations involving trigonometric functions that are satisfied only by some values of the variable (or
Distance Formula in 3-D Given any two points P 1 (x 1, y 1, z 1 ) and P 2 (x 2, y 2, z 2 ) the distance between them is ( ) ( ) ( )
 and P 2 (x 2, y 2, z 2 ) the distance between them is ( ) ( ) ( )") Vectors and the Geometry of Space Vector Space The 3-D coordinate system (rectangular coordinates ) is the intersection of three perpendicular (orthogonal) lines called coordinate axis: x, y, and z. Their
Vectors and the Geometry of Space Vector Space The 3-D coordinate system (rectangular coordinates ) is the intersection of three perpendicular (orthogonal) lines called coordinate axis: x, y, and z. Their
I. Vectors and Geometry in Two and Three Dimensions
 I. Vectors and Geometry in Two and Three Dimensions I.1 Points and Vectors Each point in two dimensions may be labeled by two coordinates (a, b) which specify the position of the point in some units with
I. Vectors and Geometry in Two and Three Dimensions I.1 Points and Vectors Each point in two dimensions may be labeled by two coordinates (a, b) which specify the position of the point in some units with
Lecture 2: Vector-Vector Operations
 Lecture 2: Vector-Vector Operations Vector-Vector Operations Addition of two vectors Geometric representation of addition and subtraction of vectors Vectors and points Dot product of two vectors Geometric
Lecture 2: Vector-Vector Operations Vector-Vector Operations Addition of two vectors Geometric representation of addition and subtraction of vectors Vectors and points Dot product of two vectors Geometric
Section 1.8/1.9. Linear Transformations
 Section 1.8/1.9 Linear Transformations Motivation Let A be a matrix, and consider the matrix equation b = Ax. If we vary x, we can think of this as a function of x. Many functions in real life the linear
Section 1.8/1.9 Linear Transformations Motivation Let A be a matrix, and consider the matrix equation b = Ax. If we vary x, we can think of this as a function of x. Many functions in real life the linear
Vectors Primer. M.C. Simani. July 7, 2007
 Vectors Primer M.. Simani Jul 7, 2007 This note gives a short introduction to the concept of vector and summarizes the basic properties of vectors. Reference textbook: Universit Phsics, Young and Freedman,
Vectors Primer M.. Simani Jul 7, 2007 This note gives a short introduction to the concept of vector and summarizes the basic properties of vectors. Reference textbook: Universit Phsics, Young and Freedman,
Introduction to Vectors Pg. 279 # 1 6, 8, 9, 10 OR WS 1.1 Sept. 7. Vector Addition Pg. 290 # 3, 4, 6, 7, OR WS 1.2 Sept. 8
 UNIT 1 INTRODUCTION TO VECTORS Lesson TOPIC Suggested Work Sept. 5 1.0 Review of Pre-requisite Skills Pg. 273 # 1 9 OR WS 1.0 Fill in Info sheet and get permission sheet signed. Bring in $3 for lesson
UNIT 1 INTRODUCTION TO VECTORS Lesson TOPIC Suggested Work Sept. 5 1.0 Review of Pre-requisite Skills Pg. 273 # 1 9 OR WS 1.0 Fill in Info sheet and get permission sheet signed. Bring in $3 for lesson
Vector Calculus. Lecture Notes
 Vector Calculus Lecture Notes Adolfo J. Rumbos c Draft date November 23, 211 2 Contents 1 Motivation for the course 5 2 Euclidean Space 7 2.1 Definition of n Dimensional Euclidean Space........... 7 2.2
Vector Calculus Lecture Notes Adolfo J. Rumbos c Draft date November 23, 211 2 Contents 1 Motivation for the course 5 2 Euclidean Space 7 2.1 Definition of n Dimensional Euclidean Space........... 7 2.2
Honors Advanced Mathematics Determinants page 1
 Determinants page 1 Determinants For every square matrix A, there is a number called the determinant of the matrix, denoted as det(a) or A. Sometimes the bars are written just around the numbers of the
Determinants page 1 Determinants For every square matrix A, there is a number called the determinant of the matrix, denoted as det(a) or A. Sometimes the bars are written just around the numbers of the
MAC Module 5 Vectors in 2-Space and 3-Space II
 MAC 2103 Module 5 Vectors in 2-Space and 3-Space II 1 Learning Objectives Upon completing this module, you should be able to: 1. Determine the cross product of a vector in R 3. 2. Determine a scalar triple
MAC 2103 Module 5 Vectors in 2-Space and 3-Space II 1 Learning Objectives Upon completing this module, you should be able to: 1. Determine the cross product of a vector in R 3. 2. Determine a scalar triple
Vector Geometry. Chapter 5
 Chapter 5 Vector Geometry In this chapter we will look more closely at certain geometric aspects of vectors in R n. We will first develop an intuitive understanding of some basic concepts by looking at
Chapter 5 Vector Geometry In this chapter we will look more closely at certain geometric aspects of vectors in R n. We will first develop an intuitive understanding of some basic concepts by looking at
Matrix-Vector Products and the Matrix Equation Ax = b
 Matrix-Vector Products and the Matrix Equation Ax = b A. Havens Department of Mathematics University of Massachusetts, Amherst January 31, 2018 Outline 1 Matrices Acting on Vectors Linear Combinations
Matrix-Vector Products and the Matrix Equation Ax = b A. Havens Department of Mathematics University of Massachusetts, Amherst January 31, 2018 Outline 1 Matrices Acting on Vectors Linear Combinations
MTH 254 STUDY GUIDE Summary of Topics
 MTH 254 STUDY GUIDE Summary of Topics Lesson 1 (p. 3): Coordinate Systems, 10.2, 13.5 Lesson 2 (p. 9): Vectors in the Plane and in 3-Space, 11.1, 11.2 Lesson 3 (p. 16): Dot Products, 11.3 Lesson 4 (p.
MTH 254 STUDY GUIDE Summary of Topics Lesson 1 (p. 3): Coordinate Systems, 10.2, 13.5 Lesson 2 (p. 9): Vectors in the Plane and in 3-Space, 11.1, 11.2 Lesson 3 (p. 16): Dot Products, 11.3 Lesson 4 (p.
Chapter 6. Orthogonality and Least Squares
 Chapter 6 Orthogonality and Least Squares Section 6.1 Inner Product, Length, and Orthogonality Orientation Recall: This course is about learning to: Solve the matrix equation Ax = b Solve the matrix equation
Chapter 6 Orthogonality and Least Squares Section 6.1 Inner Product, Length, and Orthogonality Orientation Recall: This course is about learning to: Solve the matrix equation Ax = b Solve the matrix equation
Workbook. MAT 397: Calculus III
 Workbook MAT 397: Calculus III Instructor: Caleb McWhorter Name: Summer 217 Contents Preface..................................................... 2 1 Spatial Geometry & Vectors 3 1.1 Basic n Euclidean
Workbook MAT 397: Calculus III Instructor: Caleb McWhorter Name: Summer 217 Contents Preface..................................................... 2 1 Spatial Geometry & Vectors 3 1.1 Basic n Euclidean
Vector equations of lines in the plane and 3-space (uses vector addition & scalar multiplication).
.") Boise State Math 275 (Ultman) Worksheet 1.6: Lines and Planes From the Toolbox (what you need from previous classes) Plotting points, sketching vectors. Be able to find the component form a vector given
Boise State Math 275 (Ultman) Worksheet 1.6: Lines and Planes From the Toolbox (what you need from previous classes) Plotting points, sketching vectors. Be able to find the component form a vector given
Vector calculus background
 Vector calculus background Jiří Lebl January 18, 2017 This class is really the vector calculus that you haven t really gotten to in Calc III. Let us start with a very quick review of the concepts from
Vector calculus background Jiří Lebl January 18, 2017 This class is really the vector calculus that you haven t really gotten to in Calc III. Let us start with a very quick review of the concepts from
Vectors Year 12 Term 1
 Vectors Year 12 Term 1 1 Vectors - A Vector has Two properties Magnitude and Direction - A vector is usually denoted in bold, like vector a, or a, or many others. In 2D - a = xı + yȷ - a = x, y - where,
Vectors Year 12 Term 1 1 Vectors - A Vector has Two properties Magnitude and Direction - A vector is usually denoted in bold, like vector a, or a, or many others. In 2D - a = xı + yȷ - a = x, y - where,
Vector Calculus handout
 Vector Calculus handout The Fundamental Theorem of Line Integrals Theorem 1 (The Fundamental Theorem of Line Integrals). Let C be a smooth curve given by a vector function r(t), where a t b, and let f
Vector Calculus handout The Fundamental Theorem of Line Integrals Theorem 1 (The Fundamental Theorem of Line Integrals). Let C be a smooth curve given by a vector function r(t), where a t b, and let f
Sec. 1.1: Basics of Vectors
 Sec. 1.1: Basics of Vectors Notation for Euclidean space R n : all points (x 1, x 2,..., x n ) in n-dimensional space. Examples: 1. R 1 : all points on the real number line. 2. R 2 : all points (x 1, x
Sec. 1.1: Basics of Vectors Notation for Euclidean space R n : all points (x 1, x 2,..., x n ) in n-dimensional space. Examples: 1. R 1 : all points on the real number line. 2. R 2 : all points (x 1, x
MATH Topics in Applied Mathematics Lecture 12: Evaluation of determinants. Cross product.
 MATH 311-504 Topics in Applied Mathematics Lecture 12: Evaluation of determinants. Cross product. Determinant is a scalar assigned to each square matrix. Notation. The determinant of a matrix A = (a ij
MATH 311-504 Topics in Applied Mathematics Lecture 12: Evaluation of determinants. Cross product. Determinant is a scalar assigned to each square matrix. Notation. The determinant of a matrix A = (a ij
Section 13.4 The Cross Product
 Section 13.4 The Cross Product Multiplying Vectors 2 In this section we consider the more technical multiplication which can be defined on vectors in 3-space (but not vectors in 2-space). 1. Basic Definitions
Section 13.4 The Cross Product Multiplying Vectors 2 In this section we consider the more technical multiplication which can be defined on vectors in 3-space (but not vectors in 2-space). 1. Basic Definitions
the Further Mathematics network
 the Further Mathematics network www.fmnetwork.org.uk 1 the Further Mathematics network www.fmnetwork.org.uk Further Pure 3: Teaching Vector Geometry Let Maths take you Further 2 Overview Scalar and vector
the Further Mathematics network www.fmnetwork.org.uk 1 the Further Mathematics network www.fmnetwork.org.uk Further Pure 3: Teaching Vector Geometry Let Maths take you Further 2 Overview Scalar and vector
Differential Topology Solution Set #2
 Differential Topology Solution Set #2 Select Solutions 1. Show that X compact implies that any smooth map f : X Y is proper. Recall that a space is called compact if, for every cover {U } by open sets
Differential Topology Solution Set #2 Select Solutions 1. Show that X compact implies that any smooth map f : X Y is proper. Recall that a space is called compact if, for every cover {U } by open sets
MATH 12 CLASS 2 NOTES, SEP Contents. 2. Dot product: determining the angle between two vectors 2
 MATH 12 CLASS 2 NOTES, SEP 23 2011 Contents 1. Dot product: definition, basic properties 1 2. Dot product: determining the angle between two vectors 2 Quick links to definitions/theorems Dot product definition
MATH 12 CLASS 2 NOTES, SEP 23 2011 Contents 1. Dot product: definition, basic properties 1 2. Dot product: determining the angle between two vectors 2 Quick links to definitions/theorems Dot product definition
Vector Calculus lecture notes
 Vector Calculus lecture notes Thomas Baird December 13, 21 Contents 1 Geometry of R 3 2 1.1 Coordinate Systems............................... 2 1.1.1 Distance................................. 3 1.1.2 Surfaces.................................
Vector Calculus lecture notes Thomas Baird December 13, 21 Contents 1 Geometry of R 3 2 1.1 Coordinate Systems............................... 2 1.1.1 Distance................................. 3 1.1.2 Surfaces.................................
Wed Feb The vector spaces 2, 3, n. Announcements: Warm-up Exercise:
 Wed Feb 2 4-42 The vector spaces 2, 3, n Announcements: Warm-up Exercise: 4-42 The vector space m and its subspaces; concepts related to "linear combinations of vectors" Geometric interpretation of vectors
Wed Feb 2 4-42 The vector spaces 2, 3, n Announcements: Warm-up Exercise: 4-42 The vector space m and its subspaces; concepts related to "linear combinations of vectors" Geometric interpretation of vectors
Mathematics 2203, Test 1 - Solutions
 Mathematics 220, Test 1 - Solutions F, 2010 Philippe B. Laval Name 1. Determine if each statement below is True or False. If it is true, explain why (cite theorem, rule, property). If it is false, explain
Mathematics 220, Test 1 - Solutions F, 2010 Philippe B. Laval Name 1. Determine if each statement below is True or False. If it is true, explain why (cite theorem, rule, property). If it is false, explain
Section 2.3. The Cross Product
 Section.3. The Cross Product Recall that a vector can be uniquely determined by its length and direction. De nition. The cross product of two vectors u and v, denote by u v, is a vector with length j u
Section.3. The Cross Product Recall that a vector can be uniquely determined by its length and direction. De nition. The cross product of two vectors u and v, denote by u v, is a vector with length j u
Main topics for the First Midterm Exam
 Main topics for the First Midterm Exam The final will cover Sections.-.0, 2.-2.5, and 4.. This is roughly the material from first three homeworks and three quizzes, in addition to the lecture on Monday,
Main topics for the First Midterm Exam The final will cover Sections.-.0, 2.-2.5, and 4.. This is roughly the material from first three homeworks and three quizzes, in addition to the lecture on Monday,
Introduction - Motivation. Many phenomena (physical, chemical, biological, etc.) are model by differential equations. f f(x + h) f(x) (x) = lim
 are model by differential equations. f f(x + h) f(x) (x) = lim") Introduction - Motivation Many phenomena (physical, chemical, biological, etc.) are model by differential equations. Recall the definition of the derivative of f(x) f f(x + h) f(x) (x) = lim. h 0 h Its
Introduction - Motivation Many phenomena (physical, chemical, biological, etc.) are model by differential equations. Recall the definition of the derivative of f(x) f f(x + h) f(x) (x) = lim. h 0 h Its
LS.1 Review of Linear Algebra
 LS. LINEAR SYSTEMS LS.1 Review of Linear Algebra In these notes, we will investigate a way of handling a linear system of ODE s directly, instead of using elimination to reduce it to a single higher-order
LS. LINEAR SYSTEMS LS.1 Review of Linear Algebra In these notes, we will investigate a way of handling a linear system of ODE s directly, instead of using elimination to reduce it to a single higher-order
Math 4377/6308 Advanced Linear Algebra
 1.4 Linear Combinations Math 4377/6308 Advanced Linear Algebra 1.4 Linear Combinations & Systems of Linear Equations Jiwen He Department of Mathematics, University of Houston jiwenhe@math.uh.edu math.uh.edu/
1.4 Linear Combinations Math 4377/6308 Advanced Linear Algebra 1.4 Linear Combinations & Systems of Linear Equations Jiwen He Department of Mathematics, University of Houston jiwenhe@math.uh.edu math.uh.edu/
Vector Geometry Final Exam Review
 Vector Geometry Final Exam Review Problem 1. Find the center and the radius for the sphere x + 4x 3 + y + z 4y 3 that the center and the radius of a sphere z 7 = 0. Note: Recall x + ax + y + by + z = d
Vector Geometry Final Exam Review Problem 1. Find the center and the radius for the sphere x + 4x 3 + y + z 4y 3 that the center and the radius of a sphere z 7 = 0. Note: Recall x + ax + y + by + z = d
Announcements Monday, September 25
 Announcements Monday, September 25 The midterm will be returned in recitation on Friday. You can pick it up from me in office hours before then. Keep tabs on your grades on Canvas. WeBWorK 1.7 is due Friday
Announcements Monday, September 25 The midterm will be returned in recitation on Friday. You can pick it up from me in office hours before then. Keep tabs on your grades on Canvas. WeBWorK 1.7 is due Friday
3 = arccos. A a and b are parallel, B a and b are perpendicular, C a and b are normalized, or D this is always true.
 Math 210-101 Test #1 Sept. 16 th, 2016 Name: Answer Key Be sure to show your work! 1. (20 points) Vector Basics: Let v = 1, 2,, w = 1, 2, 2, and u = 2, 1, 1. (a) Find the area of a parallelogram spanned
Math 210-101 Test #1 Sept. 16 th, 2016 Name: Answer Key Be sure to show your work! 1. (20 points) Vector Basics: Let v = 1, 2,, w = 1, 2, 2, and u = 2, 1, 1. (a) Find the area of a parallelogram spanned
Gradient and Directional Derivatives October 2013
 Gradient and Directional Derivatives 14.5 07 October 2013 function of one variable: makes sense to talk about the rate of change function of several variables: rate of change depends on direction slope
Gradient and Directional Derivatives 14.5 07 October 2013 function of one variable: makes sense to talk about the rate of change function of several variables: rate of change depends on direction slope
Finish section 3.6 on Determinants and connections to matrix inverses. Use last week's notes. Then if we have time on Tuesday, begin:
 Math 225-4 Week 7 notes Sections 4-43 vector space concepts Tues Feb 2 Finish section 36 on Determinants and connections to matrix inverses Use last week's notes Then if we have time on Tuesday, begin
Math 225-4 Week 7 notes Sections 4-43 vector space concepts Tues Feb 2 Finish section 36 on Determinants and connections to matrix inverses Use last week's notes Then if we have time on Tuesday, begin
Chapter 13: Vectors and the Geometry of Space
 Chapter 13: Vectors and the Geometry of Space 13.1 3-Dimensional Coordinate System 13.2 Vectors 13.3 The Dot Product 13.4 The Cross Product 13.5 Equations of Lines and Planes 13.6 Cylinders and Quadratic
Chapter 13: Vectors and the Geometry of Space 13.1 3-Dimensional Coordinate System 13.2 Vectors 13.3 The Dot Product 13.4 The Cross Product 13.5 Equations of Lines and Planes 13.6 Cylinders and Quadratic
Chapter 13: Vectors and the Geometry of Space
 Chapter 13: Vectors and the Geometry of Space 13.1 3-Dimensional Coordinate System 13.2 Vectors 13.3 The Dot Product 13.4 The Cross Product 13.5 Equations of Lines and Planes 13.6 Cylinders and Quadratic
Chapter 13: Vectors and the Geometry of Space 13.1 3-Dimensional Coordinate System 13.2 Vectors 13.3 The Dot Product 13.4 The Cross Product 13.5 Equations of Lines and Planes 13.6 Cylinders and Quadratic
13 Spherical geometry
 13 Spherical geometry Let ABC be a triangle in the Euclidean plane. From now on, we indicate the interior angles A = CAB, B = ABC, C = BCA at the vertices merely by A, B, C. The sides of length a = BC
13 Spherical geometry Let ABC be a triangle in the Euclidean plane. From now on, we indicate the interior angles A = CAB, B = ABC, C = BCA at the vertices merely by A, B, C. The sides of length a = BC
Differentiation - Quick Review From Calculus
 Differentiation - Quick Review From Calculus Philippe B. Laval KSU Current Semester Philippe B. Laval (KSU) Differentiation - Quick Review From Calculus Current Semester 1 / 13 Introduction In this section,
Differentiation - Quick Review From Calculus Philippe B. Laval KSU Current Semester Philippe B. Laval (KSU) Differentiation - Quick Review From Calculus Current Semester 1 / 13 Introduction In this section,
Multivariable Calculus, Applications and Theory. Kenneth Kuttler
 Multivariable Calculus, Applications and Theory Kenneth Kuttler August 19, 211 2 Contents.1 Introduction.................................. 8 I Basic Linear Algebra 11 1 Fundamentals 13 1..1 Outcomes...............................
Multivariable Calculus, Applications and Theory Kenneth Kuttler August 19, 211 2 Contents.1 Introduction.................................. 8 I Basic Linear Algebra 11 1 Fundamentals 13 1..1 Outcomes...............................
Classifying Four-Body Convex Central Configurations
 Classifying Four-Body Convex Central Configurations Gareth E. Roberts Department of Mathematics and Computer Science College of the Holy Cross Worcester, MA, USA Josep (Pitu) Cors (Universitat Politècnica
Classifying Four-Body Convex Central Configurations Gareth E. Roberts Department of Mathematics and Computer Science College of the Holy Cross Worcester, MA, USA Josep (Pitu) Cors (Universitat Politècnica
CSL361 Problem set 4: Basic linear algebra
 CSL361 Problem set 4: Basic linear algebra February 21, 2017 [Note:] If the numerical matrix computations turn out to be tedious, you may use the function rref in Matlab. 1 Row-reduced echelon matrices
CSL361 Problem set 4: Basic linear algebra February 21, 2017 [Note:] If the numerical matrix computations turn out to be tedious, you may use the function rref in Matlab. 1 Row-reduced echelon matrices
1 Summary of Chapter 2
 General Astronomy (9:61) Fall 01 Lecture 7 Notes, September 10, 01 1 Summary of Chapter There are a number of items from Chapter that you should be sure to understand. 1.1 Terminology A number of technical
General Astronomy (9:61) Fall 01 Lecture 7 Notes, September 10, 01 1 Summary of Chapter There are a number of items from Chapter that you should be sure to understand. 1.1 Terminology A number of technical