Application Note. Capacitive Pressure sensor design
|
|
|
- Clarence Thornton
- 5 years ago
- Views:
Transcription
1 Application Note Capacitive Pressure sensor design
2 Application Note: Capacitive pressure sensor design Version 8/PC Part Number March 2006 Copyright IntelliSense Software Corporation 2004, 2005, 2006 All Rights Reserved. Printed in the United States of America This manual and the software described within it are the copyright of IntelliSense Software Corporation, with all rights reserved. Restricted Rights Legend Under the copyright laws, neither this manual nor the software that it describes may be copied, in whole or in part, without the written consent of IntelliSense Software Corporation. Use, duplication or disclosure of the Programs is subject to restrictions stated in your software license agreement with IntelliSense Software Corporation. Although due effort has been made to present clear and accurate information, IntelliSense Software Corporation disclaims all warranties with respect to the software or manual, including without limitation warranties of merchantability and fitness for a particular purpose, either expressed or implied. The information in this documentation is subject to change without notice. In no event will IntelliSense Software Corporation be liable for direct, indirect, special, incidental, or consequential damages resulting from use of the software or the documentation. IntelliSuite is a trademark of IntelliSense Software Corporation. Windows NT is a trademark of Microsoft Corporation. Windows 2000 is a trademark of Microsoft Corporation. Patent Number 6,116,766: Fabrication Based Computer Aided Design System Using Virtual Fabrication Techniques Patent Number 6,157,900: Knowledge Based System and Method for Determining Material Properties from Fabrication and Operating Parameters
3 Table of contents 1 INTRODUCTION BACKGROUND MEMBRANE DESIGN SAMPLE PROCESS FLOW SURFACE MICRO-MACHINED CIRCULAR MEMBRANE DESIGN THERMO ELECTRO MECHANICAL (TEM) ANALYSIS EXPORTING TO THE TEM MODULE MANIPULATING YOUR VIEW SETTINGS MESH REFINEMENT MATERIAL PROPERTIES, LOADS AND BOUNDARY CONDITIONS Material properties Boundary conditions Loads NATURAL FREQUENCY ANALYSIS STATIC BEHAVIOR Static Stress Analysis with Residual stress effects Incorporating stress gradient effects into the model Capacitance vs. Pressure curve Capacitance vs. Voltage effects Pull-in and membrane collapse Overpressure effects (stress effects) DYNAMIC BEHAVIOR Settling time to a step response Frequency/Spectrum response SYSTEM MODEL EXTRACTION Dominant and relevant modes Strain energy capture Electrostatic energy calculations Exporting the system model SIMULATING YOUR MACROMODEL IN SYNPLE Wiring your circuit Transient Force vs. displacement simulation Compatibility with system modeling tools: PSpice and SIMetrix Result Comparison of SYNPLE, PSpice and SIMetrix SYSTEM LEVEL MODELING SYSTEM LEVEL SIMULATION High level readout circuitry Transistor level design CONCLUSION REVIEW OF CONCEPTS PUTTING IT ALL TOGETHER SUMMARY...93
4 1 Introduction 1.1 Background Pressure sensors and microphones are among the killer applications of MEMS and are rapidly replacing sensors made with more traditional technologies. In this application note, we discuss in detail the various issues in fabrication, design analysis and system modeling of integrated pressure sensor devices. While IntelliSuite and SYNPLE can be used to model capacitive, piezoresistive and piezoelectric sensors, we will focus on electrostatic/capacitive sensing mechanisms in this note. Once the reader grasps the concepts behind the modeling, we are sure that he/she will be able to device sensors based on other detection technologies as well. MEMS based pressure sensors and microphones use an elastic plate (also known as a membrane or a diaphragm as the active mechanical element. As the plate deflects due to the applied pressure, the middle surface (or the neutral axis, is located midway between the top and bottom surfaces of the plate) remains unstressed. The pressure introduces bi-axial stresses in the plate. As the plate moves up, straight lines in the plate that were originally vertical remain straight but become inclined; the intensity of either principle stresses at points on any such line is proportional to the distance from the middle surface, and the maximum stresses occur at the outer surfaces of the plate. Capacitive pressure sensors work by detecting the change in capacitance between a fixed plate and the flexible plate. Piezoresistive pressure sensors work by converting the change in stresses to a change in resistivity of a strategically placed piezoresistor. Piezoelectric sensors work by converting the stresses into a change in electrical potential using a suitable piezoelectric coating. 1.2 Membrane design The reader is referred to the classic Roark s formulas for stress and strain by W.C. Young and R. G. Budynas (Mc Graw Hill) for detailed analytical formulas for plate design. There are several classic papers that the reader may want to peruse for a good understanding of pressure sensors. These include: [1] A simulation program for the sensitivity and linearity of piezoresistive pressure sensors. Liwei Lin, JMEMS, December 1999 [2] Solid state capacitive pressure transducers. WH Ko. Sensors and Actuators, vol 10, 1986 Analytical solutions are available for an unstressed membrane. These can be used as a starting point for the design. In reality, full Finite Element/Boundary Element (FE/BE) based calculations are needed to incorporate processing related effects such as residual stresses and strain gradients. These are important effects that significantly effect the membrane deflection and can lead to unwanted effects such as membrane bi-stability (oil-can effect). As a starting point for the pressure sensor design, consider a circular membrane with a radius R and thickness h. The deflection of the circular membrane is given by the equation: W()= r p ( 49.6D R2 r 2 ) 2 Eh 3 where D = 12 1 ν 2 ( ) The maximum deflection of the membrane is given at the center of the membrane when r = 0 as:
5 The maximum stress in the membrane is given as: ( W max = 1 ν 2 )R Eh 3 p σ max = 1.25pR2 h 2 For CMOS integrated poly-silicon and silicon pressure sensors, the typical material properties are E = GPa, Poisson s ratio = The density of silicon is 2320 kg/m 3. In most surface micromachined processes the poly-silicon thickness is between 1-2 µm. The capacitor gap in integrated pressure sensors is between 1-2 µm depending upon the choice of sacrificial material. Since the capacitance between the electrodes is a non-linear function of the gap, most sensor designers like to work in the linear range of pressure-displacement response. The maximum deflection at full scale is chosen such that the maximum deflection does not exceed 25-30% of the capacitance gap. Assuming mean values of membrane thickness of 1.5 µm and capacitor gap of 1.5 µm, let us limit the maximum deflection of the membrane at full scale to 0.4 µm. Based upon this criteria we can estimate the membrane sizes for different full scale pressures using the expression R = 4 w max 4.13Eh 3 (1 υ 2 )p The table overleaf gives a sample calculation of the radius of the device for different pressures. 2
6 Material Properties E 1.69E+11 Pa Nu 0.22 Density 2320 kg/m3 Dimensions Thickness 1.50E-06 m Capacitor gap 1.50E-06 m Maximum stroke 0.28 of gap Max stroke 4.20E-07 m Dimensional estimates (radius) Max stroke (w_max) 4.20E-07 m Pressure (bar) Radius (µm) Maximum stress (Mpa) Table 1 Pressure sensor design 3

7 2 Sample process flow 2.1 Surface micro-machined circular membrane design 1. Open the Pressure Sensor Simulation file (ProcessFlow.fab) in IntelliFAB using the default process database. The figure below shows the process flow for the surface micromachined pressure sensor. This can be done by: a) Launching IntelliFAB b) Clicking on the left hand side of the interface (white) and choosing File > Open Database > matfab.db c) Click on the right hand side of the interface (blue) this activates the fabrication portion of the interface open the Fabrication Process flow by choosing File > Open Fab > IntelliSuite\Training\Application_Notes\Capacitive_Pressure_Sensor\Process\ProcessFlow.fab. d) You will see the interface shown below. Figure 1 Process flow for the surface micromachined pressure sensor 4
 make sure you take a look at the mask layout associated with the step. You can do it by clicking the Layout button as shown in the figure below.")
8 2. Explore the process table by double clicking on each of the process steps and looking at the process parameters. In particular, when you open a Lithography step (Definition UV.) make sure you take a look at the mask layout associated with the step. You can do it by clicking the Layout button as shown in the figure below. Figure 2 Spend some time exploring the process parameters. Make sure you take a peek at the Mask layouts associated with the process by clicking the Layout button. 5
 Note that the Last step of sacrificing the silicon wafer was added to isolate the device for ease of simulation, in reality the silicon wafer is never sacrificially etched!")
9 3. Visualize the process by choosing Construct > Visualize. Step through the process visualization using the Start, Previous and Next buttons on the interface. a) Note that the Last step of sacrificing the silicon wafer was added to isolate the device for ease of simulation, in reality the silicon wafer is never sacrificially etched! Figure 3 Visualize the device fabrication 6

10 3 Thermo electro mechanical (TEM) Analysis 3.1 Exporting to the TEM module You can start the simulation by exporting the fabrication sequence into the ThermoElectroMechanical module. You can do this by Clicking Simulate menu and choosing the ThermoElectroMechanical menu entry. Figure 4 Export to the TEM module Save the Analysis file (.save) in a convenient directory (make sure that there are no spaces in the folder or file name). Figure 5 Save the analysis file (.save) in a convenient location make sure that the file, folder and path names do not have spaces in them. Use an underscore character instead of a space. IntelliSuite will automatically create a Finite Element Meshed model of the structure and open it in the TEM module. 7


11 3.2 Manipulating your view settings Since surface micromachined MEMS devices are typically just a few thick, they appear to be very flat in the initial view in TEM. TEM gives you the capability to independently set X, Y and Z default zoom factors. 1. You can use the Shift + Up arrow and Shift + Down arrow to zoom in and out. Ctrl + Up arrow and Ctrl + Down can be used to rotate the device. You can also use your mouse to manipulate the device in the 3D space. 2. You can use the View > Zoom > Define to set your view setting in X, Y and X directions. Figure 6 Zoom Define Dialog allows you to set independent X, Y and Z zoom factors. Choose a Z zoom factor of 100 in this case. 3. Feel free to explore the different view options available and make yourself comfortable with the keyboard shortcuts and mouse movements to manipulate the device the in 3D space. 8
12 4. The view of the pressure sensor should look similar to the figure below Figure 7 Initial view of the device after setting the appropriate zoom factors 3.3 Mesh refinement Click Mesh Auto Enter 10 in the maximum mesh size dialogue 9

13 3.4 Material Properties, Loads and Boundary conditions In order to perform analyses in the TEM module, you can follow the menus sequentially from View to Result. The actions that are to be performed are laid out in a logical progression. The menus will allow you to choose your simulation settings, check and modify material properties, apply loads and boundary conditions, mesh the device, and explore the simulation results Material properties The material properties of the device can be set by Selecting the Materials menu. Materials > Check/Modify. You can click on an entity to set the material properties. 10


14 Figure 8 Use Material > Check/Modify to modify the material properties 11
 density Figure 10 You can apply residual")
15 Figure 9 Selected entities are highlighted in red. For instance clicking on the word density will bring the modify density dialog which allows you to specify either a constant or a variable (with temperature) density Figure 10 You can apply residual stresses (constant) or high order variable stress gradient profiles Boundary conditions You can set the boundary conditions by selecting the appropriate degree of freedom of a particular entitiy and clicking on the appropriate boundary. Make sure you fix all of the fixed boundaries of the device as shown in thefigures below. 12

16 Figure 11 Fixed boundary conditions for the pressure sensor. The bottom electrode and the surface in contact with the silicon are fixed Click Boundary.SelectionMode CheckOnly Click...Boundary Fixed All the Fixed Boundaries will be highlighted Loads IntelliSuite allows you to apply a large number of loads to the device. These range from forces, pressures, Coriolis forces, temperatures and other stimuli. The loads can be constant loads, time varying loads or frequency varying loads. We will revisit the load application in static analysis. 3.5 Natural frequency analysis Let us explore the first 5 modes of the device. Frequency analysis allows you to quickly check your model setup and mesh convergence information. Since AC/Frequency analysis results can be performed quickly, they are often used to make sure of the model accuracy. 1. Set the simulation settings by choosing Simulation > Simulation Settings Figure 12 Accessing Simulation settings 2. Set the simulation settings as below. Click Apply and OK 13

17 Figure 13 Simulation settings for frequency analysis 3. Start the simulation by choosing Analysis > Start Frequency Analysis. Wait for the analysis to complete this should take 1-5 minutes depending upon your machine 4. Explore the results by choosing Result > Natural Frequency Natural Frequency 14
18 5. View mode animations by choosing Result > Mode Animation 3.6 Static behavior Static Stress Analysis with Residual stress effects To model the effect of a Residual Stress of 20Mpa on the diaphragm, first change the simulation settings as shown in the Figure below 15
19 Click Apply OK Click Material Check/Modify 16
 Click OK twice to close both the")
20 Select the Diaphragm and a dialogue will appear as shown in the Figure below. Double Click Stress Enter 20 for the New Value of STRESS (Tensile stress of 20Mpa) Click OK twice to close both the dialogues. Click Analysis Start Static Analysis 17
21 Click Results Z Displacement Incorporating stress gradient effects into the model Click Material.Check/Modify 18
22 Click on the diaphragm Double Click Stress Click Variable Enter the stress values as shown in the Figure below Click Analysis..Start Static Analysis Click Result Displacement...Z 19
23 3.6.3 Capacitance vs. Pressure curve Click Simulation Simulation Setting Change the simulation settings as shown in the Figure below. 20
24 Click Apply OK We will remove the stress gradient in the model and include a constant residual tensil stress of 20Mpa. Click Material Check/Modify Click on the Diaphragm Double Click Stress...Constant Change the value as shown in the Figure below Click Loads.SelectionMode Pick on Geometry Click...Loads Voltage Entity 21

25 Select the Diaphragm Enter 0V as shown in Figure below Click OK Click on the Bottom Doped Electrode Enter 0V for the Voltage as shown in Figure below 22


26 Click OK Click.Loads Pressure Face Select the top face of the diaphragm Enter 0 MPa for the Pressure as shown in the Figure below 23

27 Click OK Click Analysis Start Static Analysis Once the analysis is complete, Click Result Displacement z 24
28 The displacement should be due to the residual stress in the diaphragm. Click Result Capacitance This is the initial capacitance between the diaphragm and the electrode. The capacitance result is in the form a capacitance matrix. The capacitance between Entity 1 and Entity 2 or vice versa is the capacitance of interest. The capacitance results are in the form of a matrix. Entity1 Entity 1 capacitance is C11, which is the capacitance of Entity 1 with respect to infinity. Entity 1-Entity2 /Entity2-Entity1 are the capacitances of Entity 1 w.r.t Entity 2. Entity2-Entity2 is the capacitance of Entity 2 w.r.t infinity. Increase the pressure on the diaphragm and find the change in capacitance: Click Loads Pressure Face Select the top face of the diaphragm as shown in the Figure below Enter a Pressure value of MPa 25
29 Click Analysis Start Static Analysis Click Result Displacement Z Click Result Capacitance 26
30 Repeat the above steps for different values of Pressure and Plot the Pressure vs. Capacitance values to characterize the response of the capacitive pressure sensor. Please compare the results with the plot below. Capacitance vs. Pressure y = x R 2 = Capacitance [ff] Pressure [MPa] 27
31 Please note the Z-displacement for each of the Pressure values and compare the results with the plot below Displacement vs. Pressure 7.00E E-01 Displacement [Microns] 5.00E E E E E E Pressure [MPa] Capacitance vs. Voltage effects Remove the Pressure loads on the Diaphragm. Click Loads SelectionMode Delete All Click Loads Pressure Face Click Loads SelectionMode Pick on Geometry Click Loads Voltage Entity Select the diaphragm (yellow entity) Enter 10V We will retain 0V on the Doped bottom electrode (green entity) Click Analysis.StartStaticAnalysis Once the simulation is complete Click Result Displacement Z 28
32 Click Result Capacitance Repeat this simulation by varying the voltage on the yellow entity (diaphragm) The results form this information can be used to arrive at the C vs. V response. Please match the results from the simulation with the results in the Figure below. 29
33 Capacitance [MicroF] 2.40E E E E E E E E E E-08 Capacitance vs. Voltage Voltage[ V] 0 psi 50 Psi The capacitance should not change for the pressure range 0-50 Psi Pull-in and membrane collapse For Pull-in analysis, we will need to perform a Thermo-Electro-Mechanical-Relaxation analysis with Contact. The contact faces would be the bottom face of the yellow entity (diaphragm) and the top face of the green entity (bottom doped electrode). Click Simulation Simulation Settings Change the simulation settings as shown in the Figure below 30
34 Click Apply OK Click Loads Voltage Entity Select the Yellow entity (diaphragm) Click InputValueRange Enter the values as shown in the Figure below: 31
35 Click Boundary SelectionMode PickonGeometry Click.Boundary Contact FacePairDefinition Face A 32

36 Select the bottom face of the diaphragm (yellow entity) as shown in the Figure below Click OK Click Boundary Contact FacePairDefinition FaceB Rigid Select the top face of the Bottom electrode (green entity) 33
37 Click OK Click Boundary.Contact FacePairDefintion Complete Pair DoubleClick.Disabled To Enable Face 89 and 2 34


38 Click Accept OK Click Boundary Contact FacePairDefinition VerifyContactPairs Contact Pair 1 should be activated Click OK to activate the pair Click Analysis.StartStaticAnalysis Click Result 2DplotElectroMechanicalAnalysis XCoordinate Voltage Click Result 2DplotElectroMechanicalAnalysis YCoordinate Z-displacement A 2D plot will appear as shown in the Figure below 35
39 The voltage sweep was from 300V to 1000V. This can be fine tuned to 0 V to 650V with 50V increment. The simulation will take longer as more points need to be computed Overpressure effects (stress effects) Click Simulation SimulationSetting Reset the simulation settings as shown in the Figure below 36
 Click SingleValueInput Enter 0V for the voltage input")
40 Click Apply OK Click Loads Voltage Entity Select the yellow entity (diaphragm) Click SingleValueInput Enter 0V for the voltage input 37
 for the pressure")
41 Click Loads Pressure Face. Enter MPa (1000 psi) for the pressure load. 38

42 3.7 Dynamic behavior Settling time to a step response We will perform a dynamic Stress/Displacement (Direct Integration) analysis to determine the settling time for the pressure sensor and the influence of stiffness/mass damping on the settling time Click Simulation.SimulationSettings (to reset the simulation settings as shown in the Figure below) 39

 for a damping factor")
43 Click Apply OK Click Material DampingDefinition (Define Mass and Stiffness damping according to the Figure below) for a damping factor of
44 Click Apply OK Click Loads Amplitude vs. time.tabular Click Loads Pressure Face Select the top face of the diaphragm (yellow entity) Complete the Time vs. Pressure table as shown in the Figure below Click OK Click Analysis StartDynamicAnalysis Click Result 2DPlotMechanicalAnalysis.Maximum.Displacement Z The 2D plot will appear as shown in the Figure below. 41

45 3.7.2 Frequency/Spectrum response The spectrum analysis is a frequency sweep analysis. This gives the displacement results for the model over a specified frequency range. The Spectrum analysis results should match the static frequency analysis results. Click.Simulation.SimulationSetting Change the simulation settings as shown in the Figure below 42
46 Click Loads...SelectionMode.PickonGeometry Click Loads Amplitudevs.Time Tabular Set the loads according to the Figure below 43
47 (DoubleClick on 1 / 2 to Enter the Frequency and Pressure) Click.OK Click Material ModeDamping Check if the ModeDamping is set to 0.01 for Mode 1. Click OK Click.Analysis.StartDynamicAnalysis Once the Analysis is complete Click Result 2DPlotMechanicalAnalysis Maximum Displacement Z The 2D plot should appear as shown in Figure below 44
48 Compare this value with the static Frequency results (shown in Figure below) 45
49 3.8 System model extraction SME is a means by which a full three-dimensional meshed numerical model of a multi- conductor electromechanical device without dissipation can be converted into a reduced-order analytical macromodel that can be inserted as a black-box element into a mixed signal circuit simulator. This process is based upon the energy method approach, in that we shall construct analytical models for each of the energy domains of the system and determine all forces as gradients of the energy. The energy method approach has the advantage of making this process modular, enabling us to incorporate other energy domains into our models in the future. Another beneficial side effect of energy methods is that the models we shall construct are guaranteed to be energy conserving, because each stored energy shall each be constructed as an analytical function, and all forces shall be computed directly from analytically computed gradients. The SME process also has the advantage of being able to be performed almost entirely automatically, requiring the designer only to construct the model, run a few full threedimensional numerical computations, and set a few preferences a priori. Above all, this process has the ultimate benefit of constructing models that are computationally efficient, allowing their use in a dynamical simulator. Our first task is to reduce the degrees of freedom of the system. Rather than allow each node in a finite element model to be free to move in any direction, we constrain the motion of the system to a linear superposition of a select set of deformation shapes. This set will act as our basis set of motion. The positional state of the system will hence be reduced to a set of generalized coordinates, each coordinate being the scaling factor by which its corresponding basis shape will contribute. Next, we must construct analytical macromodels of each of the energy domains of the system. In the case of conservative capacitive electromechanical systems, these consist of the electrostatic, elastostatic, and kinetic energy domains. These macromodels will be analytical functions of the generalized coordinates. (As we will see in Section Using Mode Shapes as a Basis Set, some of these energy domains will be determined as a byproduct of modal analysis, avoiding the need for explicit calculation.) We can then use Lagrangian mechanics in order to construct the equations of motion of the system in terms of its generalized coordinates. Finally, we can translate these equations of motion into an analog hardware description language, thereby constructing a black-box model of the electromechanical system that can be inserted into an analog circuit simulator. The Figure below gives the Flow Chart for the conversion of an FEA model into an equivalent system level mode. 46

50 Some of the key equations used for the conversion process are discussed in this section. In general, the deformation state and dynamics of mechanical system can be accurately described as the linear combination of mode shape function or modal superposition. Ψ ext (x,y,z,t) =Ψ initial (x,y,z) + q i (t) ψ i (x,y,z) where Ψ ext represents the deformed state of structure, Ψ initial represent the initial equilibrium state (derive from the residual stress without external loads), ψ i (x,y,z) represents the displacement vector for the i th mode, q i represents the coefficients for the i th mode, which is refered as scaling factor for mode i. The modal superposition based reduce order modeling method is to solve each equation m i 2 q i / t 2 + 2ξ i ω i m i q i / t + U m (q)/ q i - Ue(q)/ q i - ψ i F j = 0 where m i is the i th mode generalized mass, ξ i is the linear modal damping ratio, ω i is the i th eigenfrequency, ψ i is the ith modal shape function (the displacement vector for the ith mode). ψ i F j is sum over all the nodes of the external node force weighted by the mode shape. U m is the strain energy, U e is the electrostatic energy, U e can be described as U e = 1/2 (C* V 2 ) The modal superposition method is efficient since just one equation per mode and one equation per involved conductor are necessary to describe the coupled system entirely, which is also applied to both linear and nonlinear geometry. The modal superposition based reduced order modeling procedure includes the following steps: 47
 and the final deformed state")
51 Find out Modal Contribution. In this step, perform the standard electromechanical relaxation analysis and solve the initial deformed state (derive from the residual stress without external loads) and the final deformed state (with mechanical loads and applied voltage). Then use the QR factorization algorithm to determine the mode contribution for the deformed state. Calculate the relationship of Strain Energy vs modal amplitudes. In this step, calculate the selected mode Strain Energy vs modal amplitudes. Calculate the relationship of mutual capacitance vs Modal amplitudes. In this step, calculate the selected mode mutual capacitance vs modal amplitudes. From step 2 and 3, user can obtain U m (q)/ q i and Ue(q)/ q i respectively. For the current pressure sensor device, the following procedure describes the steps to extract the macromodel Dominant and relevant modes Click Simulation SimulationSettings Reset the Simulations according to the Figure below 48
52 Click Material ModeDamping Definition Enter 5 for the mode number Click Analysis StartExtractMacroModel 49
 but we will retain all the 5 modes for this case.")
53 Once the analysis is complete Click Results Macromodel ModalContribution Since Mode 1 has the maximum contribution (which is the case for most cases), the rest of the Modes can be disabled (Double Click on the Mode number to disable/enable a mode) but we will retain all the 5 modes for this case. Click OK From the Modal contribution results, we notice that the contribution from Mode 1 is the maximum. For the Strain Energy Capture and the Mutual Capacitance capture, the scaling factor needs to be selected in the simulation settings. The default scaling factor for all the modes is 1, which will work for most of the cases. The only criterion for selecting the scaling factor is that the scaling factor should be greater than the modal contribution for a given mode. For a modal contribution , the scaling factor can be chosen as 1 and the scaling factor will range from -1 to Strain energy capture Click Simulation Simulation Settings Change the simulation settings as shown in the Figure below 50
54 Click Apply OK. Click Material Mode Damping Definition. Enter 5 for the Mode number Specify the Mode Damping as 0.01 for the 5 modes. Click Simulation Start Extract Macromodel Once the simulation is complete Click Result Macromodel.Strain Energy vs. Modal Amplitudes Double Click on 1 in the Model column to enable the plot option for mode 1 and then click OK. A plot of the strain energy for mode 1 over the operating range will appear as shown in Figure below 51
55 Similarly, plots for Mode 2, 3, 4 and 5 can be generated using the same procedure. 52
56 Click File Exit Click OK 53
57 3.8.3 Electrostatic energy calculations For the Mutual Capacitance vs. Modal Amplitudes calculations: Reset the Simulation settings as shown in the Figure below: Click Simulation.Simulation Settings Click Apply OK Click Simulation Start Extract Macromodel Once the simulation is complete Click File Save Click Boundary Macromodel Representative Nodes. 54


58 Select the node as shown in the Figure below (Highlighted node) Node 5715 We will apply node forces on the selected node during the simulations in SYNPLE. The macmodel.out file stores the information on the representative node Exporting the system model The four files str.out, curr.macmodel, macmodel.out and TEST.save in the current working directory provide all the information required for the macro model generation. User can manually copy the four files to a different directory for use with SYNPLE module and exit the Thermal electro-mechanical module, or keep the TEM module open and start the SYNPLE module Run the SYNPLE module and incorporate the macromodel information generated from the TEM module 55

59 3.9 Simulating your Macromodel in SYNPLE Wiring your circuit Click Start Programs IntelliSuite SYNPLE In the SYNPLE simulator, on the left side you have a list of available elements, categorized into Electrical Elements, Mechanical Elements, MEMS Elements. On the right side you have the 2D grid for your schematic as shown in the Figure below Click MEMSDevices.Click the Macromodel for TEM element and drag the element to the grid on the right side as shown in Figure below 56



60 Click the Macromodel template on your right Click Schematic IncludeReducedOrderMacromodel Select the curr.macmodel file (This file is saved in IntelliSuite\Training\Application_Notes\Capacitive_Pressuer_Sensor\SystemModeling) Click Open 57

 Click and Drag between the nodes on the respective elements to connect them with a wire.")
61 To complete the circuit for the static analysis, we will need the following electrical and general elements: A DC source element from the Electrical Devices library A Ground element from the Electrical Devices library 2 Constant and 4 Output terminal elements from the General devices library Please wire the elements as shown in the Figure below If the wires are connected correctly, a name will automatically appear for the wire. The name can be changed by double clicking on the wire. Select the wire button as shown in the Figure below (arrow) Click and Drag between the nodes on the respective elements to connect them with a wire. Please save the file at regular intervals Please refer the wiring section in the Getting Started with SYNPLE manual for more instructions on wiring and common errors. Once the wiring is complete Click File Save/Save As NOTE: Please save file in the same folder as the other files (curr.macmodel, macmodel.out, str.out) All system modeling files are saved in IntelliSuite\Training\Application_Notes\Capacitive_Pressuer_Sensor\SystemModeling Double Click the Macromodel template/element on the schematic Set the properties of the macromodel as shown in the Figure below. 58

62 Click OK Double Click the DC source and set VDC as 5.This voltage has to be less than the pull-in voltage. We will need a minimum DC voltage Double Click the Constant element connected to pin Fz1 and modify the properties as shown below 59
 for c, c1 and c2. Click.")
63 We are defining a 650µN load in the z-direction For the other Constant element leave the default values (0) for c, c1 and c2. Click...DC 60

 Select the parameter c_of_force")

64 We will now specify a DC sweep (Parametrize the applied force) for the force/loading condition. Click Parametric Variation Settings (DC Sweep) Click Add (in the parametric variation window) Select the parameter c_of_force Double Click on the Parameter and change the settings as shown in the Figure below We are sweeping the force linearly from 0N to 0.001N with the average value being 650 µn 61

65 Click Done Click Close Leave the DC Time as 0 Click Signals Select the Signals shown in Figure below 62

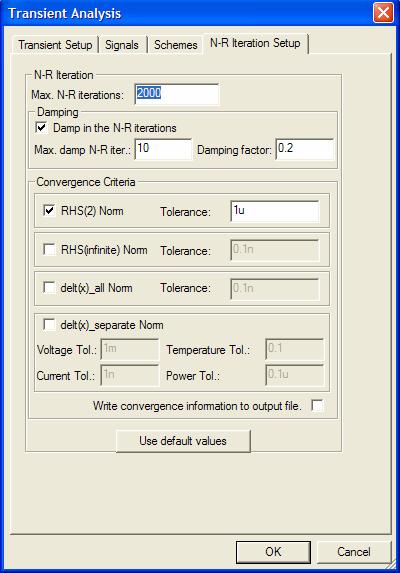
66 The first 7 signal names are names of the wires shown in Figure below Click N-R Iteration Setup and reset the settings as shown in Figure below 63


67 Click OK to start the analysis Once the analysis is complete, the signal manager with the selected signals will appear Double Click the signals to view the plot/result Eg: Double click on Z1 The plot of Z1 vs. Force will appear as shown in the Figure below 64

 as shown in Figure below This element is available in the General Devices")
68 This simulation file has been saved as Pressure_sensor1.ssc and is present in IntelliSuite\Training\Application_Notes\Capacitive_Pressure_Sensor\SystemModeling Transient Force vs. displacement simulation We will perform a transient analysis for with the same macromodel We will need to remove the constant element assigned to Fz1 and replace it with a General Pulse Source (1p) as shown in Figure below This element is available in the General Devices category Double click on the General Pulse element and change the properties as shown in the Figure below 65
69 We are applying a 2µsec pulse of 650µN Click OK Click Transient Reset the simulation settings as shown in the Figures below: 66
70 67
71 Click OK To start the simulation Once the simulation is complete Double Click on signals in the Signal manager to view the transient results 68


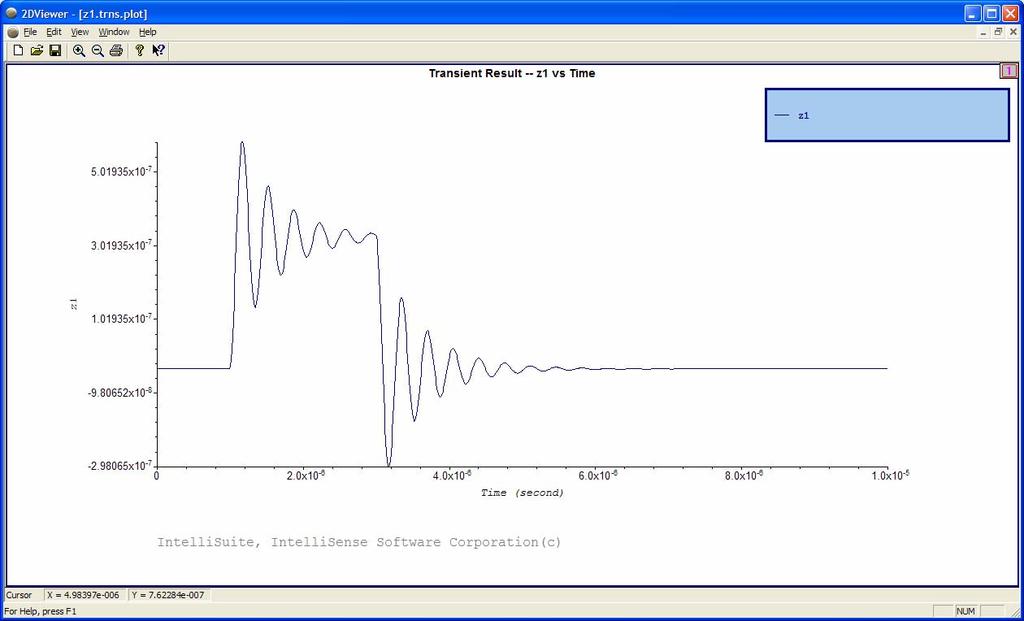
72 Eg: Double click on the Z1 signal to view the transient displacement results: Click File exit The transient simulation file is saved as IntelliSuite\Training\Applicaton_Notes\Capacitive_Pressure_Sensor\SystemModeling\pressure_sensor1tra ns.ssc 69
73 3.9.3 Compatibility with system modeling tools: PSpice and SIMetrix Result Comparison of SYNPLE, PSpice and SIMetrix The structure has 2 electrodes, which are connected to a 5 volts DC source and ground respectively. An external pulse force acts at z-direction on the reference node. We are monitoring the z-direction displacement in AC Sweep, DC Sweep and Transient analysis. AC Sweep: Swept frequency from 100 Hz to 100 MHz DC Sweep: Swept the external force from 0 to 1 mn Transient: Applied a 650 µn pulse force as shown on the plot. 70

74 DC Sweep: SYNPLE PSpice 71

75 SIMetrix 72
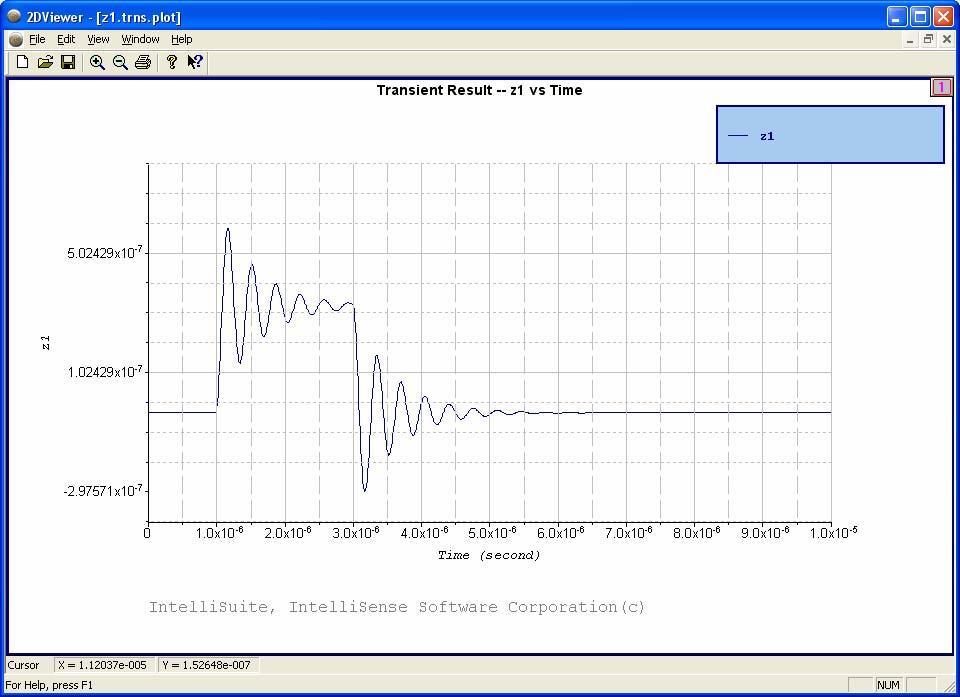
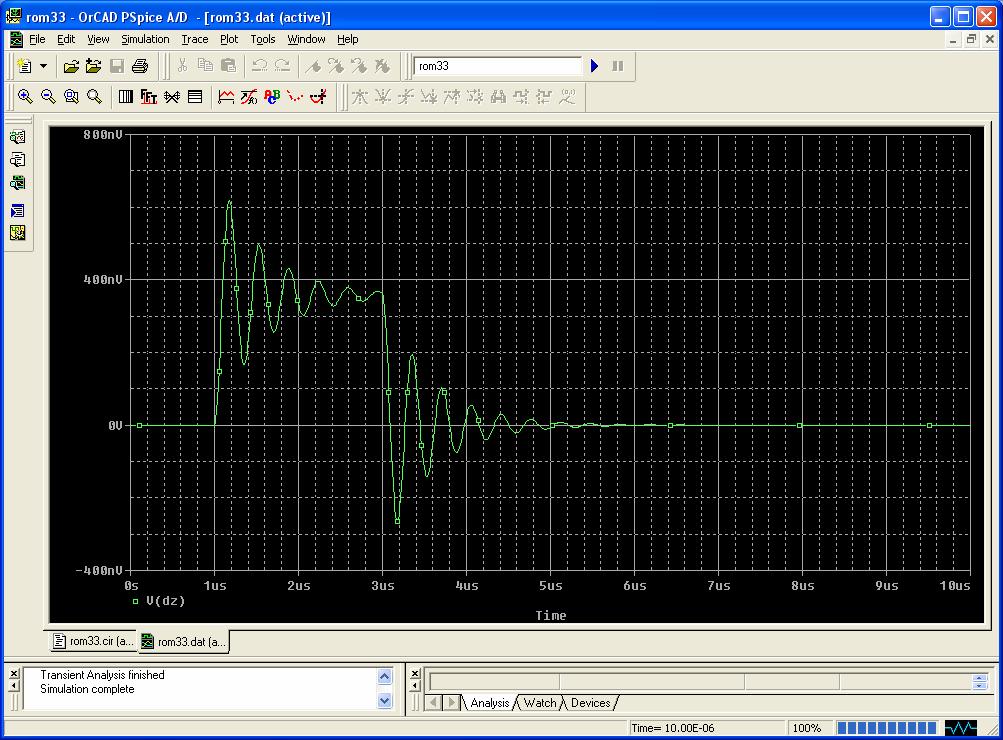
76 Transient: SYNPLE PSpice 73

77 SIMetrix: The SIMETRIX circuit files are saved in IntelliSuite\Training\Application_Notes\Capacitive_Pressuer_Sensor\SystemModeling \EDALinker\SIMetrix The EDALinker.exe file is present in IntelliSuite\Training\Application_Notes\Capacitive_Pressuer_Sensor\SystemModeling\EDALinker 74

78 AC Analysis: SYNPLE Magnitude Phase 75
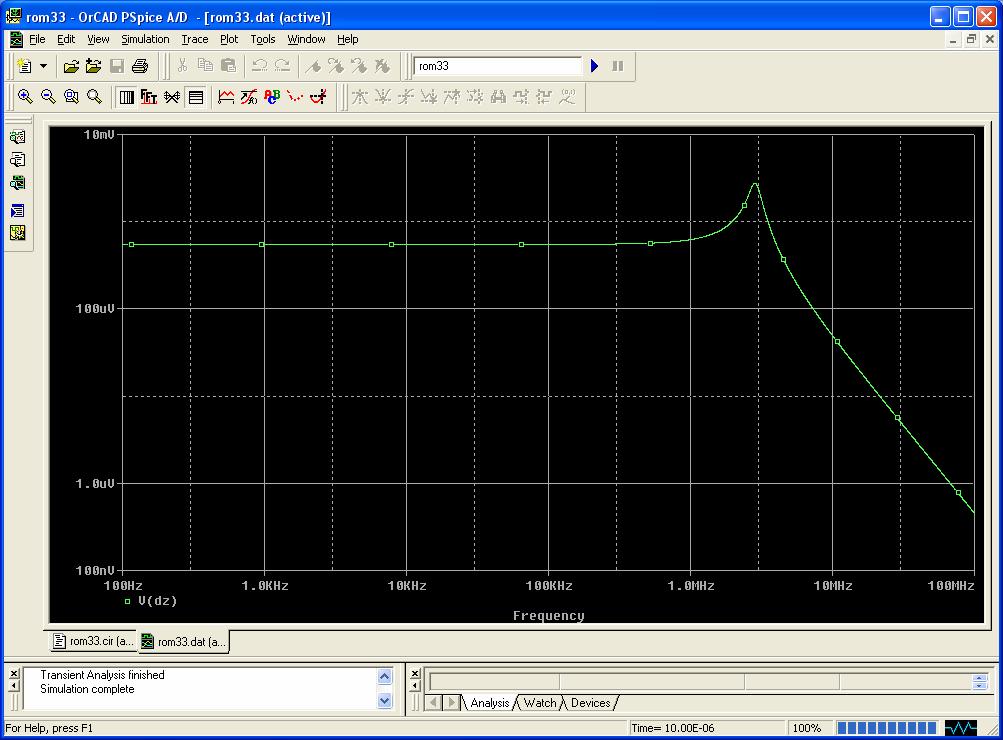
79 PSpice 76

80 SIMetrix 77

81 4 System level modeling 4.1 System level simulation High level readout circuitry Sigma Delta Modulator: This example is for a second order Sigma delta modulator. The input to the modulator is a sine wave and the output is a digital output carried by a clock signal. This Sigma Delta Converter can be interfaced with the MEMS Macromodel to simulate the complete control circuit for the MEMS device. Start the SYNPLE module. Click on File.Open.C:/IntelliSuite/SYNPLE/Examples/ElectricalCircuitExamples/First order sigmadelta modulator/sigdel5.ssc The Sigma-delta modulator file The circuit should appear as shown in Figure below with the operational amplifiers, switching circuits and capacitors. 78




82 Second Order Sigma-Delta Modulator We will perform a transient analysis with the modulator with a sine wave input. AC Input Signal Double click on the AC input signal to view the amplitude and frequency of the signal as shown in Figure 3 and Figure below. 79
83 AC input signal Click OK to close the dialog. Click on the Transient Analysis button 80


84 Click on the Transient Analysis option The Transient Analysis Dialog will show up as shown in Figure below. Transient Analysis settings 81



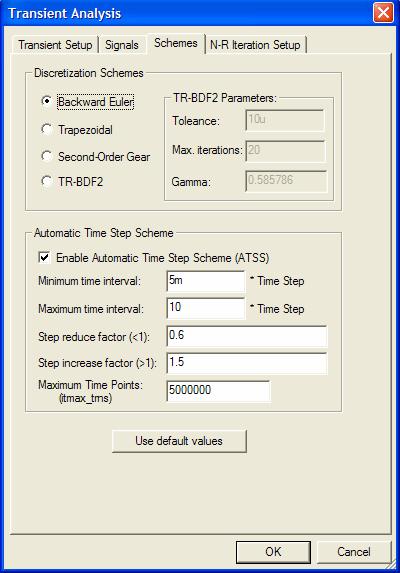
85 Please reset the Simulation settings as shown in Figures below. Signals D Discretization Schemes Click OK to Start the Transient Simulation. In Figure 7, we select only Vin as the Signal to View. We will first visualize the input Sine Wave and run the simulation again to view the output Digital Signals. The simulation should complete and a Signal Manager dialog with the signal to be viewed will appear. This is shown in Figure 10. N-R Iteration Setup 82


86 Simulation completes and the Signal Manager appears. Double Click on Vin in the Signal Manager and the input sine wave signal will appear as shown in Figure below. Input Signal Vin Click on the Transient Analysis Button again and reset the settings on the dialog as shown in Figure below 83


87 Unselect Vin and Select y and yb Click OK to start the Analysis Once the analysis completes, Click on the signals y and yb in the signal manager window. The Digital Outputs should appear as shown in Figures below. 84

88 Digital Output y Digital Ouput yb y and yb can be located on the circuit and the outputs are inverse of each other. This example was for a second order sigma-delta modulator. The FirstOrderSigmaDeltaModulator folder has more examples. 85


89 4.1.2 Transistor level design This capacitive pressure sensor was built in SYNPLE using a variety of MEMS and electrical elements available in the SYNPLE library. The circuit is designed to amplify the capacitance signal of the pressure sensor. The circuit output is an amplified Analog signal for an applied pressure pulse. The Analog signal can be sent through a Sigma Delta Converter for an equivalent digital output. Click...File Open balanced_demodulator_bsim.ssc File is located in IntelliSuite\Training\Application_Notes\Capacitive_Pressuer_Sensor\SystemModeling Double Click any Bsim to check the properties of the transistor 86


90 Variables l and w are highlighted as they are global variables for all Bsim s in the circuit. Note : To define Global variables: Click Schematic Global Variable Manager Click Add 87

91 Define the value and the variable name Click OK Close Bsim simulation contd Double click on the Pressure input to the sensor 88


92 The properties of the input signal should be changed according to the Figure below 89
93 We are defining a 120Pa pressure pulse from 0 sec to 120µsec. (The input is in the form of a triangular pulse and the loading condition is during the linear increase (first half t0 to t1 of the triangular pulse) Click OK Click Transient Set the simulation settings as shown in the Figures below 90
94 91

95 Click OK Once the Simulation is complete Double click on Pressure in the Signal Manager window The Pressure input to the sensor will be displayed as shown in Figure below Double Click Cap_of_Cs1 The capacitance output of the pressure sensor will be displayed as shown in Figure below 92
96 5 Conclusion 5.1 Review of concepts A surface micro-machined circular capacitive pressure sensor was designed and simulated in both the device level and the system level. The layout was designed in IntelliMask and the process simulation and the 3D structure were realized in IntelliFab. The device level simulation performed on the device can be categorized into frequency analysis, static analysis, dynamic analysis and system model extraction. The static analysis involved residual stress analysis, stress gradient analysis, capacitance vs. pressure analysis, capacitance vs. voltage analysis, pull-in analysis, and overpressure analysis. The dynamic analyses involved dynamic pressure analysis and spectrum analysis. System model extraction involved extraction of relevant modes, strain energy and electrostatic energy. A Transient Force vs. displacement analysis was performed on the system model of the pressure sensor in SYNPLE and the results were compared with the results from SIMETRIX and PSPICE. System level analysis involved sigma delta modulator analysis and transistor level design. The sigma delta modulator could be potentially connected to the macromodel output to convert the analog output into an equivalent digital signal. The Transistor level design was for a pressure sensor designed using a collection of MEMS and Electrical elements including BSims (Transistors). The properties of the transistor can be varied according to the information available from the process flow. 5.2 Putting it all together We will now review the results from each of the analyses and the significance of the results. The natural frequency analysis was done to determine the natural frequencies for the first five modes. These results were further used to validate the results from the frequency/spectrum analysis. The static stress and residual stress analysis were performed to determine the effects of these stresses on the device behavior. The Capacitance vs. Pressure analysis was performed to determine the change in capacitance for applied pressure and characterize the capacitive response of the device. The Capacitance vs. Voltage analysis was performed to determined the displacement and the resulting capacitance caused by varying the voltage on the device. The pull-in and membrane collapse analysis were performed to determine the pull-in voltage for the device. Overpressure effects were analyzed to determine the device behavior at very high pressure loads. The dynamic analysis was performed on the device to determine the settling time for the sensor for a specific force/pressure pulse and damping factor. The system model of the pressure sensor was extracted to perform a system level analysis in SYNPLE and in EDA tools such as SIMETRIX and PSPICE. The results from SYNPLE, SIMETRIX and PSICE were compared for a transient Force vs. Displacement analysis. 5.3 Summary A Capacitive pressure sensor was designed successfully both at the device level and the system level. The methodical approach to design a surface micromachined capacitive pressure sensor from Layout through process simulation, Frequency Analysis, Static Analysis, Dynamic Analysis, System Model Extraction, SPICE extraction, System level simulation in SYNPLE, transistor level simulation in SYNPLE and comparison of results between SYNPLE.SPICE and SIMETRIX has been discussed in detail in this application note. 93
Application Note. Capillary Zone Electrophoresis
 Application Note Capillary Zone Electrophoresis i Application Note: Capillary Zone Electrophoresis Version 8/PC Part Number 30-090-101 September 2008 Copyright IntelliSense Software Corporation 2004, 2005,
Application Note Capillary Zone Electrophoresis i Application Note: Capillary Zone Electrophoresis Version 8/PC Part Number 30-090-101 September 2008 Copyright IntelliSense Software Corporation 2004, 2005,
An Accurate Model for Pull-in Voltage of Circular Diaphragm Capacitive Micromachined Ultrasonic Transducers (CMUT)
") An Accurate Model for Pull-in Voltage of Circular Diaphragm Capacitive Micromachined Ultrasonic Transducers (CMUT) Mosaddequr Rahman, Sazzadur Chowdhury Department of Electrical and Computer Engineering
An Accurate Model for Pull-in Voltage of Circular Diaphragm Capacitive Micromachined Ultrasonic Transducers (CMUT) Mosaddequr Rahman, Sazzadur Chowdhury Department of Electrical and Computer Engineering
CHAPTER 4 DESIGN AND ANALYSIS OF CANTILEVER BEAM ELECTROSTATIC ACTUATORS
 61 CHAPTER 4 DESIGN AND ANALYSIS OF CANTILEVER BEAM ELECTROSTATIC ACTUATORS 4.1 INTRODUCTION The analysis of cantilever beams of small dimensions taking into the effect of fringing fields is studied and
61 CHAPTER 4 DESIGN AND ANALYSIS OF CANTILEVER BEAM ELECTROSTATIC ACTUATORS 4.1 INTRODUCTION The analysis of cantilever beams of small dimensions taking into the effect of fringing fields is studied and
Multiphysics Modeling
 11 Multiphysics Modeling This chapter covers the use of FEMLAB for multiphysics modeling and coupled-field analyses. It first describes the various ways of building multiphysics models. Then a step-by-step
11 Multiphysics Modeling This chapter covers the use of FEMLAB for multiphysics modeling and coupled-field analyses. It first describes the various ways of building multiphysics models. Then a step-by-step
Midterm 2 PROBLEM POINTS MAX
 Midterm 2 PROBLEM POINTS MAX 1 30 2 24 3 15 4 45 5 36 1 Personally, I liked the University; they gave us money and facilities, we didn't have to produce anything. You've never been out of college. You
Midterm 2 PROBLEM POINTS MAX 1 30 2 24 3 15 4 45 5 36 1 Personally, I liked the University; they gave us money and facilities, we didn't have to produce anything. You've never been out of college. You
Chapter 5. Vibration Analysis. Workbench - Mechanical Introduction ANSYS, Inc. Proprietary 2009 ANSYS, Inc. All rights reserved.
 Workbench - Mechanical Introduction 12.0 Chapter 5 Vibration Analysis 5-1 Chapter Overview In this chapter, performing free vibration analyses in Simulation will be covered. In Simulation, performing a
Workbench - Mechanical Introduction 12.0 Chapter 5 Vibration Analysis 5-1 Chapter Overview In this chapter, performing free vibration analyses in Simulation will be covered. In Simulation, performing a
EXPERIMENT 4: AN ELECTRICAL-THERMAL ACTUATOR
 EXPERIMENT 4: AN ELECTRICAL-THERMAL ACTUATOR 1. OBJECTIVE: 1.1 To analyze an electrical-thermal actuator used in a micro-electromechanical system (MEMS). 2. INTRODUCTION 2.1 Introduction to Thermal Actuator
EXPERIMENT 4: AN ELECTRICAL-THERMAL ACTUATOR 1. OBJECTIVE: 1.1 To analyze an electrical-thermal actuator used in a micro-electromechanical system (MEMS). 2. INTRODUCTION 2.1 Introduction to Thermal Actuator
Leaf Spring (Material, Contact, geometric nonlinearity)
") 00 Summary Summary Nonlinear Static Analysis - Unit: N, mm - Geometric model: Leaf Spring.x_t Leaf Spring (Material, Contact, geometric nonlinearity) Nonlinear Material configuration - Stress - Strain
00 Summary Summary Nonlinear Static Analysis - Unit: N, mm - Geometric model: Leaf Spring.x_t Leaf Spring (Material, Contact, geometric nonlinearity) Nonlinear Material configuration - Stress - Strain
GENERAL CONTACT AND HYSTERESIS ANALYSIS OF MULTI-DIELECTRIC MEMS DEVICES UNDER THERMAL AND ELECTROSTATIC ACTUATION
 GENERAL CONTACT AND HYSTERESIS ANALYSIS OF MULTI-DIELECTRIC MEMS DEVICES UNDER THERMAL AND ELECTROSTATIC ACTUATION Yie He, James Marchetti, Carlos Gallegos IntelliSense Corporation 36 Jonspin Road Wilmington,
GENERAL CONTACT AND HYSTERESIS ANALYSIS OF MULTI-DIELECTRIC MEMS DEVICES UNDER THERMAL AND ELECTROSTATIC ACTUATION Yie He, James Marchetti, Carlos Gallegos IntelliSense Corporation 36 Jonspin Road Wilmington,
Fog Monitor 100 (FM 100) Extinction Module. Operator Manual
 Extinction Module. Operator Manual") Particle Analysis and Display System (PADS): Fog Monitor 100 (FM 100) Extinction Module Operator Manual DOC-0217 Rev A-1 PADS 2.7.3, FM 100 Extinction Module 2.7.0 5710 Flatiron Parkway, Unit B Boulder,
Particle Analysis and Display System (PADS): Fog Monitor 100 (FM 100) Extinction Module Operator Manual DOC-0217 Rev A-1 PADS 2.7.3, FM 100 Extinction Module 2.7.0 5710 Flatiron Parkway, Unit B Boulder,
INF5490 RF MEMS. LN03: Modeling, design and analysis. Spring 2008, Oddvar Søråsen Department of Informatics, UoO
 INF5490 RF MEMS LN03: Modeling, design and analysis Spring 2008, Oddvar Søråsen Department of Informatics, UoO 1 Today s lecture MEMS functional operation Transducer principles Sensor principles Methods
INF5490 RF MEMS LN03: Modeling, design and analysis Spring 2008, Oddvar Søråsen Department of Informatics, UoO 1 Today s lecture MEMS functional operation Transducer principles Sensor principles Methods
ES205 Analysis and Design of Engineering Systems: Lab 1: An Introductory Tutorial: Getting Started with SIMULINK
 ES205 Analysis and Design of Engineering Systems: Lab 1: An Introductory Tutorial: Getting Started with SIMULINK What is SIMULINK? SIMULINK is a software package for modeling, simulating, and analyzing
ES205 Analysis and Design of Engineering Systems: Lab 1: An Introductory Tutorial: Getting Started with SIMULINK What is SIMULINK? SIMULINK is a software package for modeling, simulating, and analyzing
Simple circuits - 3 hr
 Simple circuits - 3 hr Resistances in circuits Analogy of water flow and electric current An electrical circuit consists of a closed loop with a number of different elements through which electric current
Simple circuits - 3 hr Resistances in circuits Analogy of water flow and electric current An electrical circuit consists of a closed loop with a number of different elements through which electric current
ECE 220 Laboratory 4 Volt Meter, Comparators, and Timer
 ECE 220 Laboratory 4 Volt Meter, Comparators, and Timer Michael W. Marcellin Please follow all rules, procedures and report requirements as described at the beginning of the document entitled ECE 220 Laboratory
ECE 220 Laboratory 4 Volt Meter, Comparators, and Timer Michael W. Marcellin Please follow all rules, procedures and report requirements as described at the beginning of the document entitled ECE 220 Laboratory
CHAPTER 5 FIXED GUIDED BEAM ANALYSIS
 77 CHAPTER 5 FIXED GUIDED BEAM ANALYSIS 5.1 INTRODUCTION Fixed guided clamped and cantilever beams have been designed and analyzed using ANSYS and their performance were calculated. Maximum deflection
77 CHAPTER 5 FIXED GUIDED BEAM ANALYSIS 5.1 INTRODUCTION Fixed guided clamped and cantilever beams have been designed and analyzed using ANSYS and their performance were calculated. Maximum deflection
EE C247B / ME C218 INTRODUCTION TO MEMS DESIGN SPRING 2014 C. Nguyen PROBLEM SET #4
 Issued: Wednesday, Mar. 5, 2014 PROBLEM SET #4 Due (at 9 a.m.): Tuesday Mar. 18, 2014, in the EE C247B HW box near 125 Cory. 1. Suppose you would like to fabricate the suspended cross beam structure below
Issued: Wednesday, Mar. 5, 2014 PROBLEM SET #4 Due (at 9 a.m.): Tuesday Mar. 18, 2014, in the EE C247B HW box near 125 Cory. 1. Suppose you would like to fabricate the suspended cross beam structure below
ELEC 1908 The Electric Potential (V) March 28, 2013
 March 28, 2013") ELEC 1908 The Electric Potential (V) March 28, 2013 1 Abstract The objective of this lab is to solve numerically Laplace s equation in order to obtain the electric potential distribution in di erent electric
ELEC 1908 The Electric Potential (V) March 28, 2013 1 Abstract The objective of this lab is to solve numerically Laplace s equation in order to obtain the electric potential distribution in di erent electric
Outline. 4 Mechanical Sensors Introduction General Mechanical properties Piezoresistivity Piezoresistive Sensors Capacitive sensors Applications
 Sensor devices Outline 4 Mechanical Sensors Introduction General Mechanical properties Piezoresistivity Piezoresistive Sensors Capacitive sensors Applications Introduction Two Major classes of mechanical
Sensor devices Outline 4 Mechanical Sensors Introduction General Mechanical properties Piezoresistivity Piezoresistive Sensors Capacitive sensors Applications Introduction Two Major classes of mechanical
ISSP User Guide CY3207ISSP. Revision C
 CY3207ISSP ISSP User Guide Revision C Cypress Semiconductor 198 Champion Court San Jose, CA 95134-1709 Phone (USA): 800.858.1810 Phone (Intnl): 408.943.2600 http://www.cypress.com Copyrights Copyrights
CY3207ISSP ISSP User Guide Revision C Cypress Semiconductor 198 Champion Court San Jose, CA 95134-1709 Phone (USA): 800.858.1810 Phone (Intnl): 408.943.2600 http://www.cypress.com Copyrights Copyrights
Part 6: Dynamic design analysis
 Part 6: Dynamic design analysis BuildSoft nv All rights reserved. No part of this document may be reproduced or transmitted in any form or by any means, electronic or manual, for any purpose, without written
Part 6: Dynamic design analysis BuildSoft nv All rights reserved. No part of this document may be reproduced or transmitted in any form or by any means, electronic or manual, for any purpose, without written
Coupling Physics. Tomasz Stelmach Senior Application Engineer
 Coupling Physics Tomasz Stelmach Senior Application Engineer Agenda Brief look @ Multiphysics solution What is new in R18 Fluent Maxwell coupling wireless power transfer Brief look @ ANSYS Multiphysics
Coupling Physics Tomasz Stelmach Senior Application Engineer Agenda Brief look @ Multiphysics solution What is new in R18 Fluent Maxwell coupling wireless power transfer Brief look @ ANSYS Multiphysics
MATERIAL MECHANICS, SE2126 COMPUTER LAB 2 PLASTICITY
 MATERIAL MECHANICS, SE2126 COMPUTER LAB 2 PLASTICITY PART A INTEGRATED CIRCUIT An integrated circuit can be thought of as a very complex maze of electronic components and metallic connectors. These connectors
MATERIAL MECHANICS, SE2126 COMPUTER LAB 2 PLASTICITY PART A INTEGRATED CIRCUIT An integrated circuit can be thought of as a very complex maze of electronic components and metallic connectors. These connectors
Design of a MEMS Capacitive Comb-drive Accelerometer
 Design of a MEMS Capacitive Comb-drive Accelerometer Tolga Kaya* 1, Behrouz Shiari 2, Kevin Petsch 1 and David Yates 2 1 Central Michigan University, 2 University of Michigan * kaya2t@cmich.edu Abstract:
Design of a MEMS Capacitive Comb-drive Accelerometer Tolga Kaya* 1, Behrouz Shiari 2, Kevin Petsch 1 and David Yates 2 1 Central Michigan University, 2 University of Michigan * kaya2t@cmich.edu Abstract:
EE C245 / ME C218 INTRODUCTION TO MEMS DESIGN FALL 2009 PROBLEM SET #7. Due (at 7 p.m.): Thursday, Dec. 10, 2009, in the EE C245 HW box in 240 Cory.
: Thursday, Dec. 10, 2009, in the EE C245 HW box in 240 Cory.") Issued: Thursday, Nov. 24, 2009 PROBLEM SET #7 Due (at 7 p.m.): Thursday, Dec. 10, 2009, in the EE C245 HW box in 240 Cory. 1. Gyroscopes are inertial sensors that measure rotation rate, which is an extremely
Issued: Thursday, Nov. 24, 2009 PROBLEM SET #7 Due (at 7 p.m.): Thursday, Dec. 10, 2009, in the EE C245 HW box in 240 Cory. 1. Gyroscopes are inertial sensors that measure rotation rate, which is an extremely
MEMS Tuning-Fork Gyroscope Mid-Term Report Amanda Bristow Travis Barton Stephen Nary
 MEMS Tuning-Fork Gyroscope Mid-Term Report Amanda Bristow Travis Barton Stephen Nary Abstract MEMS based gyroscopes have gained in popularity for use as rotation rate sensors in commercial products like
MEMS Tuning-Fork Gyroscope Mid-Term Report Amanda Bristow Travis Barton Stephen Nary Abstract MEMS based gyroscopes have gained in popularity for use as rotation rate sensors in commercial products like
Using the Timoshenko Beam Bond Model: Example Problem
 Using the Timoshenko Beam Bond Model: Example Problem Authors: Nick J. BROWN John P. MORRISSEY Jin Y. OOI School of Engineering, University of Edinburgh Jian-Fei CHEN School of Planning, Architecture and
Using the Timoshenko Beam Bond Model: Example Problem Authors: Nick J. BROWN John P. MORRISSEY Jin Y. OOI School of Engineering, University of Edinburgh Jian-Fei CHEN School of Planning, Architecture and
Modelling of Different MEMS Pressure Sensors using COMSOL Multiphysics
 International Journal of Current Engineering and Technology E-ISSN 2277 4106, P-ISSN 2347 5161 2017 INPRESSCO, All Rights Reserved Available at http://inpressco.com/category/ijcet Research Article Modelling
International Journal of Current Engineering and Technology E-ISSN 2277 4106, P-ISSN 2347 5161 2017 INPRESSCO, All Rights Reserved Available at http://inpressco.com/category/ijcet Research Article Modelling
O P E R A T I N G M A N U A L
 OPERATING MANUAL WeatherJack OPERATING MANUAL 1-800-645-1061 The baud rate is 2400 ( 8 bits, 1 stop bit, no parity. Flow control = none) To make sure the unit is on line, send an X. the machine will respond
OPERATING MANUAL WeatherJack OPERATING MANUAL 1-800-645-1061 The baud rate is 2400 ( 8 bits, 1 stop bit, no parity. Flow control = none) To make sure the unit is on line, send an X. the machine will respond
Biosensors and Instrumentation: Tutorial 2
 Biosensors and Instrumentation: Tutorial 2. One of the most straightforward methods of monitoring temperature is to use the thermal variation of a resistor... Suggest a possible problem with the use of
Biosensors and Instrumentation: Tutorial 2. One of the most straightforward methods of monitoring temperature is to use the thermal variation of a resistor... Suggest a possible problem with the use of
An example solution of a panel in the elastic-plastic regime
 An example solution of a panel in the elastic-plastic regime Piotr Mika May, 2013 1. Example solution of the panel with ABAQUS program The purpose is to analyze an elastic-plastic panel. The elastic solution
An example solution of a panel in the elastic-plastic regime Piotr Mika May, 2013 1. Example solution of the panel with ABAQUS program The purpose is to analyze an elastic-plastic panel. The elastic solution
Performance Evaluation of MEMS Based Capacitive Pressure Sensor for Hearing Aid Application
 International Journal of Advanced Engineering Research and Science (IJAERS) 215] [Vol-2, Issue-4, April- Performance Evaluation of MEMS Based Capacitive Pressure Sensor for Hearing Aid Application Apoorva
International Journal of Advanced Engineering Research and Science (IJAERS) 215] [Vol-2, Issue-4, April- Performance Evaluation of MEMS Based Capacitive Pressure Sensor for Hearing Aid Application Apoorva
Physical Modeling and Simulation Rev. 2
 11. Coupled Fields Analysis 11.1. Introduction In the previous chapters we have separately analysed the electromagnetic, thermal and mechanical fields. We have discussed their sources, associated material
11. Coupled Fields Analysis 11.1. Introduction In the previous chapters we have separately analysed the electromagnetic, thermal and mechanical fields. We have discussed their sources, associated material
Electric Fields and Equipotentials
 OBJECTIVE Electric Fields and Equipotentials To study and describe the two-dimensional electric field. To map the location of the equipotential surfaces around charged electrodes. To study the relationship
OBJECTIVE Electric Fields and Equipotentials To study and describe the two-dimensional electric field. To map the location of the equipotential surfaces around charged electrodes. To study the relationship
Published by: PIONEER RESEARCH & DEVELOPMENT GROUP(
 MEMS based Piezo resistive Pressure Sensor Swathi Krishnamurthy 1, K.V Meena 2, E & C Engg. Dept., The Oxford College of Engineering, Karnataka. Bangalore 560009 Abstract The paper describes the performance
MEMS based Piezo resistive Pressure Sensor Swathi Krishnamurthy 1, K.V Meena 2, E & C Engg. Dept., The Oxford College of Engineering, Karnataka. Bangalore 560009 Abstract The paper describes the performance
Sensors & Transducers 2016 by IFSA Publishing, S. L.
 Sensors & Transducers, Vol. 96, Issue, January 206, pp. 52-56 Sensors & Transducers 206 by IFSA Publishing, S. L. http://www.sensorsportal.com Collapse Mode Characteristics of Parallel Plate Ultrasonic
Sensors & Transducers, Vol. 96, Issue, January 206, pp. 52-56 Sensors & Transducers 206 by IFSA Publishing, S. L. http://www.sensorsportal.com Collapse Mode Characteristics of Parallel Plate Ultrasonic
EE C245 / ME C218 INTRODUCTION TO MEMS DESIGN FALL 2011 C. Nguyen PROBLEM SET #7. Table 1: Gyroscope Modeling Parameters
 Issued: Wednesday, Nov. 23, 2011. PROBLEM SET #7 Due (at 7 p.m.): Thursday, Dec. 8, 2011, in the EE C245 HW box in 240 Cory. 1. Gyroscopes are inertial sensors that measure rotation rate, which is an extremely
Issued: Wednesday, Nov. 23, 2011. PROBLEM SET #7 Due (at 7 p.m.): Thursday, Dec. 8, 2011, in the EE C245 HW box in 240 Cory. 1. Gyroscopes are inertial sensors that measure rotation rate, which is an extremely
Example Resistive Heating
 Example Resistive Heating SOLVED WITH COMSOL MULTIPHYSICS 3.5a COPYRIGHT 2008. All right reserved. No part of this documentation may be photocopied or reproduced in any form without prior written consent
Example Resistive Heating SOLVED WITH COMSOL MULTIPHYSICS 3.5a COPYRIGHT 2008. All right reserved. No part of this documentation may be photocopied or reproduced in any form without prior written consent
Lab 1 Uniform Motion - Graphing and Analyzing Motion
 Lab 1 Uniform Motion - Graphing and Analyzing Motion Objectives: < To observe the distance-time relation for motion at constant velocity. < To make a straight line fit to the distance-time data. < To interpret
Lab 1 Uniform Motion - Graphing and Analyzing Motion Objectives: < To observe the distance-time relation for motion at constant velocity. < To make a straight line fit to the distance-time data. < To interpret
SENSOR DEVICES MECHANICAL SENSORS
 SENSOR DEVICES MECHANICAL SENSORS OUTLINE 4 Mechanical Sensors Introduction General mechanical properties Piezoresistivity Piezoresistive sensors Capacitive sensors Applications INTRODUCTION MECHANICAL
SENSOR DEVICES MECHANICAL SENSORS OUTLINE 4 Mechanical Sensors Introduction General mechanical properties Piezoresistivity Piezoresistive sensors Capacitive sensors Applications INTRODUCTION MECHANICAL
Ansoft HFSS 3D Boundary Manager Sources
 Lumped Gap Defining s Voltage and Current When you select Source, you may choose from the following source types: Incident wave Voltage drop Current Magnetic bias These sources are available only for driven
Lumped Gap Defining s Voltage and Current When you select Source, you may choose from the following source types: Incident wave Voltage drop Current Magnetic bias These sources are available only for driven
Using Thermal Boundary Conditions in SOLIDWORKS Simulation to Simulate a Press Fit Connection
 Using Thermal Boundary Conditions in SOLIDWORKS Simulation to Simulate a Press Fit Connection Simulating a press fit condition in SOLIDWORKS Simulation can be very challenging when there is a large amount
Using Thermal Boundary Conditions in SOLIDWORKS Simulation to Simulate a Press Fit Connection Simulating a press fit condition in SOLIDWORKS Simulation can be very challenging when there is a large amount
August 7, 2007 NUMERICAL SOLUTION OF LAPLACE'S EQUATION
 August 7, 007 NUMERICAL SOLUTION OF LAPLACE'S EQUATION PURPOSE: This experiment illustrates the numerical solution of Laplace's Equation using a relaxation method. The results of the relaxation method
August 7, 007 NUMERICAL SOLUTION OF LAPLACE'S EQUATION PURPOSE: This experiment illustrates the numerical solution of Laplace's Equation using a relaxation method. The results of the relaxation method
Circular Motion and Centripetal Force
 [For International Campus Lab ONLY] Objective Measure the centripetal force with the radius, mass, and speed of a particle in uniform circular motion. Theory ----------------------------- Reference --------------------------
[For International Campus Lab ONLY] Objective Measure the centripetal force with the radius, mass, and speed of a particle in uniform circular motion. Theory ----------------------------- Reference --------------------------
Electro-Thermal Analysis using SYMMIC with Microwave Office
 SYMMIC Application Note: Electro-Thermal Analysis using SYMMIC with Microwave Office SYMMIC: Template-Based Thermal Simulator for Monolithic Microwave Integrated Circuits is a trademark of CapeSym, Inc.
SYMMIC Application Note: Electro-Thermal Analysis using SYMMIC with Microwave Office SYMMIC: Template-Based Thermal Simulator for Monolithic Microwave Integrated Circuits is a trademark of CapeSym, Inc.
Homework assignment from , MEMS Capacitors lecture
 Homework assignment from 05-02-2006, MEMS Capacitors lecture 1. Calculate the capacitance for a round plate of 100µm diameter with an air gap space of 2.0 µm. C = e r e 0 * A/d (1) e 0 = 8.85E-12 F/m e
Homework assignment from 05-02-2006, MEMS Capacitors lecture 1. Calculate the capacitance for a round plate of 100µm diameter with an air gap space of 2.0 µm. C = e r e 0 * A/d (1) e 0 = 8.85E-12 F/m e
STRAIN GAUGES YEDITEPE UNIVERSITY DEPARTMENT OF MECHANICAL ENGINEERING
 STRAIN GAUGES YEDITEPE UNIVERSITY DEPARTMENT OF MECHANICAL ENGINEERING 1 YEDITEPE UNIVERSITY ENGINEERING FACULTY MECHANICAL ENGINEERING LABORATORY 1. Objective: Strain Gauges Know how the change in resistance
STRAIN GAUGES YEDITEPE UNIVERSITY DEPARTMENT OF MECHANICAL ENGINEERING 1 YEDITEPE UNIVERSITY ENGINEERING FACULTY MECHANICAL ENGINEERING LABORATORY 1. Objective: Strain Gauges Know how the change in resistance
Y. C. Lee. Micro-Scale Engineering I Microelectromechanical Systems (MEMS)
") Micro-Scale Engineering I Microelectromechanical Systems (MEMS) Y. C. Lee Department of Mechanical Engineering University of Colorado Boulder, CO 80309-0427 leeyc@colorado.edu January 15, 2014 1 Contents
Micro-Scale Engineering I Microelectromechanical Systems (MEMS) Y. C. Lee Department of Mechanical Engineering University of Colorado Boulder, CO 80309-0427 leeyc@colorado.edu January 15, 2014 1 Contents
Lab 1: Numerical Solution of Laplace s Equation
 Lab 1: Numerical Solution of Laplace s Equation ELEC 3105 last modified August 27, 2012 1 Before You Start This lab and all relevant files can be found at the course website. You will need to obtain an
Lab 1: Numerical Solution of Laplace s Equation ELEC 3105 last modified August 27, 2012 1 Before You Start This lab and all relevant files can be found at the course website. You will need to obtain an
Simulation based Analysis of Capacitive Pressure Sensor with COMSOL Multiphysics
 Simulation based Analysis of Capacitive Pressure Sensor with COMSOL Multiphysics Nisheka Anadkat MTech- VLSI Design, Hindustan University, Chennai, India Dr. M J S Rangachar Dean Electrical Sciences, Hindustan
Simulation based Analysis of Capacitive Pressure Sensor with COMSOL Multiphysics Nisheka Anadkat MTech- VLSI Design, Hindustan University, Chennai, India Dr. M J S Rangachar Dean Electrical Sciences, Hindustan
ECE 407 Computer Aided Design for Electronic Systems. Simulation. Instructor: Maria K. Michael. Overview
 407 Computer Aided Design for Electronic Systems Simulation Instructor: Maria K. Michael Overview What is simulation? Design verification Modeling Levels Modeling circuits for simulation True-value simulation
407 Computer Aided Design for Electronic Systems Simulation Instructor: Maria K. Michael Overview What is simulation? Design verification Modeling Levels Modeling circuits for simulation True-value simulation
Design and Simulation of Comb Drive Capacitive Accelerometer by Using MEMS Intellisuite Design Tool
 Design and Simulation of Comb Drive Capacitive Accelerometer by Using MEMS Intellisuite Design Tool Gireesh K C 1, Harisha M 2, Karthick Raj M 3, Karthikkumar M 4, Thenmoli M 5 UG Students, Department
Design and Simulation of Comb Drive Capacitive Accelerometer by Using MEMS Intellisuite Design Tool Gireesh K C 1, Harisha M 2, Karthick Raj M 3, Karthikkumar M 4, Thenmoli M 5 UG Students, Department
St art. rp m. Km /h 1: : : : : : : : : : : : :5 2.5.
 modified 22/05/14 t 3:5 2.5 3:5 5.0 3:5 7.5 4:0 0.0 4:0 2.5 4:0 5.0 4:0 7.5 4:1 0.0 4:1 2.5 4:1 5.0 4:1 7.5 4:2 0.0 Km /h 0 25 50 75 100 125 150 175 200 225 rp m 0 250 0 500 0 750 0 100 00 125 00 1 2 3
modified 22/05/14 t 3:5 2.5 3:5 5.0 3:5 7.5 4:0 0.0 4:0 2.5 4:0 5.0 4:0 7.5 4:1 0.0 4:1 2.5 4:1 5.0 4:1 7.5 4:2 0.0 Km /h 0 25 50 75 100 125 150 175 200 225 rp m 0 250 0 500 0 750 0 100 00 125 00 1 2 3
Old Dominion University Physics 112N/227N/232N Lab Manual, 13 th Edition
 RC Circuits Experiment PH06_Todd OBJECTIVE To investigate how the voltage across a capacitor varies as it charges. To find the capacitive time constant. EQUIPMENT NEEDED Computer: Personal Computer with
RC Circuits Experiment PH06_Todd OBJECTIVE To investigate how the voltage across a capacitor varies as it charges. To find the capacitive time constant. EQUIPMENT NEEDED Computer: Personal Computer with
Slide 1. Temperatures Light (Optoelectronics) Magnetic Fields Strain Pressure Displacement and Rotation Acceleration Electronic Sensors
 Magnetic Fields Strain Pressure Displacement and Rotation Acceleration Electronic Sensors") Slide 1 Electronic Sensors Electronic sensors can be designed to detect a variety of quantitative aspects of a given physical system. Such quantities include: Temperatures Light (Optoelectronics) Magnetic
Slide 1 Electronic Sensors Electronic sensors can be designed to detect a variety of quantitative aspects of a given physical system. Such quantities include: Temperatures Light (Optoelectronics) Magnetic
Institute for Electron Microscopy and Nanoanalysis Graz Centre for Electron Microscopy
 Institute for Electron Microscopy and Nanoanalysis Graz Centre for Electron Microscopy Micromechanics Ass.Prof. Priv.-Doz. DI Dr. Harald Plank a,b a Institute of Electron Microscopy and Nanoanalysis, Graz
Institute for Electron Microscopy and Nanoanalysis Graz Centre for Electron Microscopy Micromechanics Ass.Prof. Priv.-Doz. DI Dr. Harald Plank a,b a Institute of Electron Microscopy and Nanoanalysis, Graz
Modal Analysis: What it is and is not Gerrit Visser
 Modal Analysis: What it is and is not Gerrit Visser What is a Modal Analysis? What answers do we get out of it? How is it useful? What does it not tell us? In this article, we ll discuss where a modal
Modal Analysis: What it is and is not Gerrit Visser What is a Modal Analysis? What answers do we get out of it? How is it useful? What does it not tell us? In this article, we ll discuss where a modal
MEMS INERTIAL POWER GENERATORS FOR BIOMEDICAL APPLICATIONS
 MEMS INERTIAL POWER GENERATORS FOR BIOMEDICAL APPLICATIONS P. MIAO, P. D. MITCHESON, A. S. HOLMES, E. M. YEATMAN, T. C. GREEN AND B. H. STARK Department of Electrical and Electronic Engineering, Imperial
MEMS INERTIAL POWER GENERATORS FOR BIOMEDICAL APPLICATIONS P. MIAO, P. D. MITCHESON, A. S. HOLMES, E. M. YEATMAN, T. C. GREEN AND B. H. STARK Department of Electrical and Electronic Engineering, Imperial
MOHID Land Basics Walkthrough Walkthrough for MOHID Land Basic Samples using MOHID Studio
 ACTION MODULERS MOHID Land Basics Walkthrough Walkthrough for MOHID Land Basic Samples using MOHID Studio Frank Braunschweig Luis Fernandes Filipe Lourenço October 2011 This document is the MOHID Land
ACTION MODULERS MOHID Land Basics Walkthrough Walkthrough for MOHID Land Basic Samples using MOHID Studio Frank Braunschweig Luis Fernandes Filipe Lourenço October 2011 This document is the MOHID Land
DESIGN, FABRICATION AND ELECTROMECHANICAL CHARACTERISTICS OF A MEMS BASED MICROMIRROR
 XIX IMEKO World Congress Fundamental and Applied Metrology September 6 11, 2009, Lisbon, Portugal DESIGN, FABRICATION AND ELECTROMECHANICAL CHARACTERISTICS OF A MEMS BASED MICROMIRROR Talari Rambabu 1,
XIX IMEKO World Congress Fundamental and Applied Metrology September 6 11, 2009, Lisbon, Portugal DESIGN, FABRICATION AND ELECTROMECHANICAL CHARACTERISTICS OF A MEMS BASED MICROMIRROR Talari Rambabu 1,
Miniature Electronically Trimmable Capacitor V DD. Maxim Integrated Products 1
 19-1948; Rev 1; 3/01 Miniature Electronically Trimmable Capacitor General Description The is a fine-line (geometry) electronically trimmable capacitor (FLECAP) programmable through a simple digital interface.
19-1948; Rev 1; 3/01 Miniature Electronically Trimmable Capacitor General Description The is a fine-line (geometry) electronically trimmable capacitor (FLECAP) programmable through a simple digital interface.
( ) ( ) = q o. T 12 = τ ln 2. RC Circuits. 1 e t τ. q t
 ( ) = q o. T 12 = τ ln 2. RC Circuits. 1 e t τ. q t") Objectives: To explore the charging and discharging cycles of RC circuits with differing amounts of resistance and/or capacitance.. Reading: Resnick, Halliday & Walker, 8th Ed. Section. 27-9 Apparatus:
Objectives: To explore the charging and discharging cycles of RC circuits with differing amounts of resistance and/or capacitance.. Reading: Resnick, Halliday & Walker, 8th Ed. Section. 27-9 Apparatus:
Uncertainty Quantification in MEMS
 Uncertainty Quantification in MEMS N. Agarwal and N. R. Aluru Department of Mechanical Science and Engineering for Advanced Science and Technology Introduction Capacitive RF MEMS switch Comb drive Various
Uncertainty Quantification in MEMS N. Agarwal and N. R. Aluru Department of Mechanical Science and Engineering for Advanced Science and Technology Introduction Capacitive RF MEMS switch Comb drive Various
Transducer Design and Modeling 42 nd Annual UIA Symposium Orlando Florida Jay Sheehan JFS Engineering. 4/23/2013 JFS Engineering
 42 nd Annual UIA Symposium Orlando Florida 2013 Jay Sheehan JFS Engineering Introduction ANSYS Workbench Introduction The project format Setting up different analysis Static, Modal and Harmonic Connection
42 nd Annual UIA Symposium Orlando Florida 2013 Jay Sheehan JFS Engineering Introduction ANSYS Workbench Introduction The project format Setting up different analysis Static, Modal and Harmonic Connection
BioMechanics and BioMaterials Lab (BME 541) Experiment #5 Mechanical Prosperities of Biomaterials Tensile Test
 Experiment #5 Mechanical Prosperities of Biomaterials Tensile Test") BioMechanics and BioMaterials Lab (BME 541) Experiment #5 Mechanical Prosperities of Biomaterials Tensile Test Objectives 1. To be familiar with the material testing machine(810le4) and provide a practical
BioMechanics and BioMaterials Lab (BME 541) Experiment #5 Mechanical Prosperities of Biomaterials Tensile Test Objectives 1. To be familiar with the material testing machine(810le4) and provide a practical
Piezoelectric Resonators ME 2082
 Piezoelectric Resonators ME 2082 Introduction K T : relative dielectric constant of the material ε o : relative permittivity of free space (8.854*10-12 F/m) h: distance between electrodes (m - material
Piezoelectric Resonators ME 2082 Introduction K T : relative dielectric constant of the material ε o : relative permittivity of free space (8.854*10-12 F/m) h: distance between electrodes (m - material
Module 2: Thermal Stresses in a 1D Beam Fixed at Both Ends
 Module 2: Thermal Stresses in a 1D Beam Fixed at Both Ends Table of Contents Problem Description 2 Theory 2 Preprocessor 3 Scalar Parameters 3 Real Constants and Material Properties 4 Geometry 6 Meshing
Module 2: Thermal Stresses in a 1D Beam Fixed at Both Ends Table of Contents Problem Description 2 Theory 2 Preprocessor 3 Scalar Parameters 3 Real Constants and Material Properties 4 Geometry 6 Meshing
ENSC387: Introduction to Electromechanical Sensors and Actuators LAB 3: USING STRAIN GAUGES TO FIND POISSON S RATIO AND YOUNG S MODULUS
 ENSC387: Introduction to Electromechanical Sensors and Actuators LAB 3: USING STRAIN GAUGES TO FIND POISSON S RATIO AND YOUNG S MODULUS 1 Introduction... 3 2 Objective... 3 3 Supplies... 3 4 Theory...
ENSC387: Introduction to Electromechanical Sensors and Actuators LAB 3: USING STRAIN GAUGES TO FIND POISSON S RATIO AND YOUNG S MODULUS 1 Introduction... 3 2 Objective... 3 3 Supplies... 3 4 Theory...
3. Overview of MSC/NASTRAN
 3. Overview of MSC/NASTRAN MSC/NASTRAN is a general purpose finite element analysis program used in the field of static, dynamic, nonlinear, thermal, and optimization and is a FORTRAN program containing
3. Overview of MSC/NASTRAN MSC/NASTRAN is a general purpose finite element analysis program used in the field of static, dynamic, nonlinear, thermal, and optimization and is a FORTRAN program containing
Title: ASML Stepper Semiconductor & Microsystems Fabrication Laboratory Revision: B Rev Date: 12/21/2010
 Approved by: Process Engineer / / / / Equipment Engineer 1 SCOPE The purpose of this document is to detail the use of the ASML PAS 5500 Stepper. All users are expected to have read and understood this
Approved by: Process Engineer / / / / Equipment Engineer 1 SCOPE The purpose of this document is to detail the use of the ASML PAS 5500 Stepper. All users are expected to have read and understood this
NMR Predictor. Introduction
 NMR Predictor This manual gives a walk-through on how to use the NMR Predictor: Introduction NMR Predictor QuickHelp NMR Predictor Overview Chemical features GUI features Usage Menu system File menu Edit
NMR Predictor This manual gives a walk-through on how to use the NMR Predictor: Introduction NMR Predictor QuickHelp NMR Predictor Overview Chemical features GUI features Usage Menu system File menu Edit
Microsystems Technology Laboratories i-stepperthursday, October 27, 2005 / site map / contact
 Microsystems Technology Laboratories i-stepperthursday, October 27, 2005 / site map / contact Fabrication BecomING an MTL Fab. User Internal MIT Users External Users Facilities Fab. staff MTL Orientation
Microsystems Technology Laboratories i-stepperthursday, October 27, 2005 / site map / contact Fabrication BecomING an MTL Fab. User Internal MIT Users External Users Facilities Fab. staff MTL Orientation
Dynamics Manual. Version 7
 Dynamics Manual Version 7 DYNAMICS MANUAL TABLE OF CONTENTS 1 Introduction...1-1 1.1 About this manual...1-1 2 Tutorial...2-1 2.1 Dynamic analysis of a generator on an elastic foundation...2-1 2.1.1 Input...2-1
Dynamics Manual Version 7 DYNAMICS MANUAL TABLE OF CONTENTS 1 Introduction...1-1 1.1 About this manual...1-1 2 Tutorial...2-1 2.1 Dynamic analysis of a generator on an elastic foundation...2-1 2.1.1 Input...2-1
A SHORT INTRODUCTION TO ADAMS
 A. AHADI, P. LIDSTRÖM, K. NILSSON A SHORT INTRODUCTION TO ADAMS FOR ENGINEERING PHYSICS DIVISION OF MECHANICS DEPARTMENT OF MECHANICAL ENGINEERING LUND INSTITUTE OF TECHNOLOGY 2017 FOREWORD THESE EXERCISES
A. AHADI, P. LIDSTRÖM, K. NILSSON A SHORT INTRODUCTION TO ADAMS FOR ENGINEERING PHYSICS DIVISION OF MECHANICS DEPARTMENT OF MECHANICAL ENGINEERING LUND INSTITUTE OF TECHNOLOGY 2017 FOREWORD THESE EXERCISES
Large Scale Computation of Coupled. Electro-Acoustic Systems using ANSYS and CAPA
 Large Scale Computation of Coupled Electro-Acoustic Systems using ANSYS and CAPA H.Landes, M. Kaltenbacher, R. Lerch Chair of Sensor Technology, University of Erlangen-Nürnberg Summary: The numerical simulation
Large Scale Computation of Coupled Electro-Acoustic Systems using ANSYS and CAPA H.Landes, M. Kaltenbacher, R. Lerch Chair of Sensor Technology, University of Erlangen-Nürnberg Summary: The numerical simulation
Integrating MEMS Electro-Static Driven Micro-Probe and Laser Doppler Vibrometer for Non-Contact Vibration Mode SPM System Design
 Tamkang Journal of Science and Engineering, Vol. 12, No. 4, pp. 399 407 (2009) 399 Integrating MEMS Electro-Static Driven Micro-Probe and Laser Doppler Vibrometer for Non-Contact Vibration Mode SPM System
Tamkang Journal of Science and Engineering, Vol. 12, No. 4, pp. 399 407 (2009) 399 Integrating MEMS Electro-Static Driven Micro-Probe and Laser Doppler Vibrometer for Non-Contact Vibration Mode SPM System
2.004 Dynamics and Control II Spring 2008
 MIT OpenCourseWare http://ocw.mit.edu 2.004 Dynamics and Control II Spring 2008 For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms. Massachusetts Institute
MIT OpenCourseWare http://ocw.mit.edu 2.004 Dynamics and Control II Spring 2008 For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms. Massachusetts Institute
Department of Mechanical and Aerospace Engineering. MAE334 - Introduction to Instrumentation and Computers. Final Examination.
 Name: Number: Department of Mechanical and Aerospace Engineering MAE334 - Introduction to Instrumentation and Computers Final Examination December 12, 2003 Closed Book and Notes 1. Be sure to fill in your
Name: Number: Department of Mechanical and Aerospace Engineering MAE334 - Introduction to Instrumentation and Computers Final Examination December 12, 2003 Closed Book and Notes 1. Be sure to fill in your
MASSACHUSETTS INSTITUTE OF TECHNOLOGY Physics Department
 MASSACHUSETTS INSTITUTE OF TECHNOLOGY Physics Department Physics 8.01T Fall Term 2004 Experiment 06: Work, Energy and the Harmonic Oscillator Purpose of the Experiment: In this experiment you allow a cart
MASSACHUSETTS INSTITUTE OF TECHNOLOGY Physics Department Physics 8.01T Fall Term 2004 Experiment 06: Work, Energy and the Harmonic Oscillator Purpose of the Experiment: In this experiment you allow a cart
Non-linear and time-dependent material models in Mentat & MARC. Tutorial with Background and Exercises
 Non-linear and time-dependent material models in Mentat & MARC Tutorial with Background and Exercises Eindhoven University of Technology Department of Mechanical Engineering Piet Schreurs July 7, 2009
Non-linear and time-dependent material models in Mentat & MARC Tutorial with Background and Exercises Eindhoven University of Technology Department of Mechanical Engineering Piet Schreurs July 7, 2009
Roark s Formulas for Excel Superposition Wizard
 Universal Technical Systems Inc. Roark s Formulas for Excel Superposition Wizard UTS are proud to announce the introduction of Roark s Formulas for Excel. The 7 th Edition of Roark s Formulas for Stress
Universal Technical Systems Inc. Roark s Formulas for Excel Superposition Wizard UTS are proud to announce the introduction of Roark s Formulas for Excel. The 7 th Edition of Roark s Formulas for Stress
Phonons: Bandstructure, thermal transport, thermo-electrics
 Phonons: Bandstructure, thermal transport, thermo-electrics Tutorial Version 2014.0 Phonons: Bandstructure, thermal transport, thermo-electrics: Tutorial Version 2014.0 Copyright 2008 2014 QuantumWise
Phonons: Bandstructure, thermal transport, thermo-electrics Tutorial Version 2014.0 Phonons: Bandstructure, thermal transport, thermo-electrics: Tutorial Version 2014.0 Copyright 2008 2014 QuantumWise
RC Circuits. Equipment: Capstone with 850 interface, RLC circuit board, 2 voltage sensors (no alligator clips), 3 leads V C = 1
, 3 leads V C = 1") R ircuits Equipment: apstone with 850 interface, RL circuit board, 2 voltage sensors (no alligator clips), 3 leads 1 Introduction The 3 basic linear circuits elements are the resistor, the capacitor, and
R ircuits Equipment: apstone with 850 interface, RL circuit board, 2 voltage sensors (no alligator clips), 3 leads 1 Introduction The 3 basic linear circuits elements are the resistor, the capacitor, and
Athena Visual Software, Inc. 1
 Athena Visual Studio Visual Kinetics Tutorial VisualKinetics is an integrated tool within the Athena Visual Studio software environment, which allows scientists and engineers to simulate the dynamic behavior
Athena Visual Studio Visual Kinetics Tutorial VisualKinetics is an integrated tool within the Athena Visual Studio software environment, which allows scientists and engineers to simulate the dynamic behavior
An example of panel solution in the elastic-plastic regime
 An example of panel solution in the elastic-plastic regime Piotr Mika May, 2014 2013-05-08 1. Example solution of the panel with ABAQUS program The purpose is to analyze the elastic-plastic panel. The
An example of panel solution in the elastic-plastic regime Piotr Mika May, 2014 2013-05-08 1. Example solution of the panel with ABAQUS program The purpose is to analyze the elastic-plastic panel. The
Femtet What s New. Murata Software Co., Ltd. All Rights Reserved, Copyright c Murata Manufacturing Co., Ltd.
 Femtet 2018.0 What s New Murata Software Co., Ltd. 1 Functionality Analysis Meshing General Functionality Modeling Results Display Item All Solvers Mechanical Stress/Thermal Analysis Mechanical Stress
Femtet 2018.0 What s New Murata Software Co., Ltd. 1 Functionality Analysis Meshing General Functionality Modeling Results Display Item All Solvers Mechanical Stress/Thermal Analysis Mechanical Stress
TEMPERATURE COMPENSATION FOR MEAS PRESSURE SENSORS APPLICATION NOTE
 TEMPERATURE COMPENSATION FOR MEAS PRESSURE SENSORS INTRODUCTION Advancements in microelectronic technology have pushed silicon sensors not only toward greater sophistication and lower functional cost but
TEMPERATURE COMPENSATION FOR MEAS PRESSURE SENSORS INTRODUCTION Advancements in microelectronic technology have pushed silicon sensors not only toward greater sophistication and lower functional cost but
University of TN Chattanooga Physics 1040L 8/18/2012 PHYSICS 1040L LAB LAB 4: R.C. TIME CONSTANT LAB
 PHYSICS 1040L LAB LAB 4: R.C. TIME CONSTANT LAB OBJECT: To study the discharging of a capacitor and determine the time constant for a simple circuit. APPARATUS: Capacitor (about 24 μf), two resistors (about
PHYSICS 1040L LAB LAB 4: R.C. TIME CONSTANT LAB OBJECT: To study the discharging of a capacitor and determine the time constant for a simple circuit. APPARATUS: Capacitor (about 24 μf), two resistors (about
Two problems to be solved. Example Use of SITATION. Here is the main menu. First step. Now. To load the data.
 Two problems to be solved Example Use of SITATION Mark S. Daskin Department of IE/MS Northwestern U. Evanston, IL 1. Minimize the demand weighted total distance (or average distance) Using 10 facilities
Two problems to be solved Example Use of SITATION Mark S. Daskin Department of IE/MS Northwestern U. Evanston, IL 1. Minimize the demand weighted total distance (or average distance) Using 10 facilities
How to Make or Plot a Graph or Chart in Excel
 This is a complete video tutorial on How to Make or Plot a Graph or Chart in Excel. To make complex chart like Gantt Chart, you have know the basic principles of making a chart. Though I have used Excel
This is a complete video tutorial on How to Make or Plot a Graph or Chart in Excel. To make complex chart like Gantt Chart, you have know the basic principles of making a chart. Though I have used Excel
Structural Mechanics Module
 Structural Mechanics Module User s Guide VERSION 4.3 Structural Mechanics Module User s Guide 1998 2012 COMSOL Protected by U.S. Patents 7,519,518; 7,596,474; and 7,623,991. Patents pending. This Documentation
Structural Mechanics Module User s Guide VERSION 4.3 Structural Mechanics Module User s Guide 1998 2012 COMSOL Protected by U.S. Patents 7,519,518; 7,596,474; and 7,623,991. Patents pending. This Documentation
Experiment A11 Chaotic Double Pendulum Procedure
 AME 21216: Lab I Fall 2017 Experiment A11 Chaotic Double Pendulum Procedure Deliverables: Checked lab notebook, plots with captions Background Measuring and controlling the angular position and velocity
AME 21216: Lab I Fall 2017 Experiment A11 Chaotic Double Pendulum Procedure Deliverables: Checked lab notebook, plots with captions Background Measuring and controlling the angular position and velocity
Thermo-Mechanical Analysis of a Multi-Layer MEMS Membrane
 Thermo-Mechanical Analysis of a Multi-Layer MEMS Membrane Heiko Fettig, PhD James Wylde, PhD Nortel Networks - Optical Components Ottawa ON K2H 8E9 Canada Abstract This paper examines the modelling of
Thermo-Mechanical Analysis of a Multi-Layer MEMS Membrane Heiko Fettig, PhD James Wylde, PhD Nortel Networks - Optical Components Ottawa ON K2H 8E9 Canada Abstract This paper examines the modelling of
Exercises for Windows
 Exercises for Windows CAChe User Interface for Windows Select tool Application window Document window (workspace) Style bar Tool palette Select entire molecule Select Similar Group Select Atom tool Rotate
Exercises for Windows CAChe User Interface for Windows Select tool Application window Document window (workspace) Style bar Tool palette Select entire molecule Select Similar Group Select Atom tool Rotate
Equipotential Lines and Electric Fields
 Physics Equipotential Lines and Electric Fields Plotting the Electric Field MATERIALS AND RESOURCES EACH GROUP 5 alligator clip leads 2 batteries, 9 V 2 binder clips, large computer LabQuest multimeter,
Physics Equipotential Lines and Electric Fields Plotting the Electric Field MATERIALS AND RESOURCES EACH GROUP 5 alligator clip leads 2 batteries, 9 V 2 binder clips, large computer LabQuest multimeter,
PStress R Pulley Stress Analysis Software Users Manual*
 PStress R Pulley Stress Analysis Software Users Manual* Issued: October 7, 2014 *For PStress V3.5 CONVEYOR DYNAMICS, INC. 1111 West Holly St. Bellingham, WA, 98225 (USA) Phone: +1 (360) 671-2200 Contents
PStress R Pulley Stress Analysis Software Users Manual* Issued: October 7, 2014 *For PStress V3.5 CONVEYOR DYNAMICS, INC. 1111 West Holly St. Bellingham, WA, 98225 (USA) Phone: +1 (360) 671-2200 Contents
CHAPTER THREE SYMMETRIC BENDING OF CIRCLE PLATES
 CHAPTER THREE SYMMETRIC BENDING OF CIRCLE PLATES * Governing equations in beam and plate bending ** Solution by superposition 1.1 From Beam Bending to Plate Bending 1.2 Governing Equations For Symmetric
CHAPTER THREE SYMMETRIC BENDING OF CIRCLE PLATES * Governing equations in beam and plate bending ** Solution by superposition 1.1 From Beam Bending to Plate Bending 1.2 Governing Equations For Symmetric
Orbit Support Pack for Excel. user manual
 Orbit Support Pack for Excel user manual Information in this document is subject to change without notice. Companies, names and data used in examples herein are fictitious unless noted otherwise. No part
Orbit Support Pack for Excel user manual Information in this document is subject to change without notice. Companies, names and data used in examples herein are fictitious unless noted otherwise. No part
Jasco V-670 absorption spectrometer
 Laser Spectroscopy Labs Jasco V-670 absorption spectrometer Operation instructions 1. Turn ON the power switch on the right side of the spectrophotometer. It takes about 5 minutes for the light source
Laser Spectroscopy Labs Jasco V-670 absorption spectrometer Operation instructions 1. Turn ON the power switch on the right side of the spectrophotometer. It takes about 5 minutes for the light source
Skin Damage Visualizer TiVi60 User Manual
 Skin Damage Visualizer TiVi60 User Manual PIONEERS IN TISSUE VIABILITY IMAGING User Manual 3.2 Version 3.2 October 2013 Dear Valued Customer! TiVi60 Skin Damage Visualizer Welcome to the WheelsBridge Skin
Skin Damage Visualizer TiVi60 User Manual PIONEERS IN TISSUE VIABILITY IMAGING User Manual 3.2 Version 3.2 October 2013 Dear Valued Customer! TiVi60 Skin Damage Visualizer Welcome to the WheelsBridge Skin
US06CPHY06 Instrumentation and Sensors UNIT 2 Part 2 Pressure Measurements
 US06CPHY06 Instrumentation and Sensors UNIT 2 Part 2 Pressure Measurements Pressure Measurements What is Pressure? Pressure: Force exerted by a fluid on unit surface area of a container i.e. P = F/A. Units
US06CPHY06 Instrumentation and Sensors UNIT 2 Part 2 Pressure Measurements Pressure Measurements What is Pressure? Pressure: Force exerted by a fluid on unit surface area of a container i.e. P = F/A. Units