Research Article DC Motor Parameter Identification Using Speed Step Responses
|
|
|
- Alexandra Chambers
- 5 years ago
- Views:
Transcription
1 Modelling and Simulation in Engineering Volume 212, Article ID , 5 pages doi:1.1155/212/ Research Article DC Motor Parameter Identification Using Speed Step Responses Wei Wu Flight Control and Navigation Group, Rockwell Collins, Warrenton, VA 2187, USA Correspondence should be addressed to Wei Wu, wu esi@yahoo.com Received 8 April 212; Revised 31 August 212; Accepted 3 September 212 Academic Editor: F. Gao Copyright 212 Wei Wu. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited. Based on the DC motor speed response measurement under a step voltage input, important motor parameters such as the electrical time constant, the mechanical time constant, and the friction can be estimated. A power series expansion of the motor speed response is presented, whose coefficients are related to the motor parameters. These coefficients can be easily computed using existing curve fitting methods. Experimental results are presented to demonstrate the application of this approach. In these experiments, the approach was readily implemented and gave more accurate estimates than conventional methods. 1. Introduction DC motors have wide applications in industrial control systems because they are easy to control and model. For analytical control system design and optimization, sometimes a precise model of the DC motor used in a control system may be needed. In this case, the values for reference of the motor parameters given in the motor specifications, usually provided by the motor manufacturer, may not be considered adequate, especially for cheaper DC motors which tend to have relatively large tolerances in their electrical and mechanical parameters. General system identification methods [1 4] can be applied to DC motor model identification. In particular, various methods have been applied to DC motor parameter identification; that is, [5, 6] used the algebraic identification method, [7] used the recursive least square method, [8] applied the inverse theory, [9] used the least square method, and [1] applied the moments method. Identified DC motor models are often subsequently used for controller design and/or optimization, for example, [6, 9, 11]. Without expensive testing apparatus and a long testing cycle, a quick and effective system identification approach based on the motor input and output is desirable and valuable, especially for the field applications and quick controller prototyping. In this paper, a DC motor parameter identification approach based on the Taylor series expansion of the motor speed response under a constant voltage input is presented. The relationships between the motor parameters and the coefficients of the Taylor series are established. In the implementation, the motor speed response under a constant voltage is sampled, then fit the samples to obtain the coefficients of power terms in the Taylor series. Then, the DC motor mechanical and electrical time constants, back-emf, and the friction can be computed using these coefficients. With the knowledge of these parameters, a precise motor model is obtained for the subsequent controller design. For application point of view, this approach requires only a speed/position sensor, such as an optical encoder, and a voltage power supply, no current measurement is needed and the motor is run in open loop; thus it is practical and cost effective. The curve fitting canbe performed using many existing methods, such as the least square method, and these optimization methods are widely available in commercial computing packages such as Matlab and LabVIEW. 2. Main Results Consider the following DC motor governing equations: L di dt + ir + ω = V, J dω dt = k ti + T d, whereω is the motor speed, V is the motor terminal voltage, i is the winding current, is the back-emf constant of the motor, k t is the torque constant, R is the terminal resistance, (1)
2 2 Modelling and Simulation in Engineering L is the terminal inductance, J is the motor and load inertia, and T d is the disturbance torque. T d is a combination of the cogging torque, T cog, the kinetic friction, T f, and the viscous friction (viscous damping force): T d = T cog + T f + c ω, (2) where c is the damping coefficient. According to (1), the velocity response in the Laplace domain is 1/k ω(s) b = t m t e s 2 + t m s +1 V(s) + (1/J)t m(t e s +1) t m t e s 2 + t m s +1 T d(s), (3) where t e = L/R is the electrical time constant, t m = RJ/k t is the mechanical time constant, and s is the Laplace variable. Based on these equations, we would like to know t m, t e, T d, J, and so forth, by measuring the velocity response under a known, controlled voltage input. In this paper, we consider two application situations: the first situation is that the disturbance torque is negligible, while in the second one, the disturbance needs to be considered Estimation without the Disturbance Torque. When the voltage speed response dominates; for example, the input voltage is large, we can ignore the disturbance torque in the speed response see (3). In this case, we can consider the following DC motor model: ω(s) V(s) = 1/ t m t e s 2 + t m s +1. (4) The transfer function can be factorized into ω(s) V(s) = 1/ t m t e (s + a)(s + b), (5) where a, b = 1 1 4t e /t m. (6) 2t e Assumption. It is assumed here that there are two distinct real poles; that is, t m > 4t e. For a constant voltage input V(s) = V /s, the speed response is where ω(s) = V / t m t e s(s + a)(s + b) = α 1 s + α 2 s + a + α 3 s + b, (7) α 1 = V, α 2 = V b a b, α 3 = V a b a. (8) Consider the three terms in the step response one at atime.α 1 /s is a step function in the time domain; both α 2 /(s + a) andα 1 /(s + b) are exponential functions in the time domain and can be expanded using the Taylor series. Expanding the term α 2 /(s + a), we get V b a b ( 1 at a2 t a3 t 3 + Expanding the term α 3 /(s + b), we get V a b a ( 1 bt b2 t b3 t 3 + ). (9) ). (1) Combining the three terms together, we have the total speed response: ω(t) = V ( 1 2 β t β 1t β 2t 4 + ), (11) where β = ab, β 1 = ab(a + b), and β 2 = ab(a 2 + ab + b 2 ). According to (6), ab = 1, a + b = 1. (12) t m t e t e Thus, we have t m = β 1 β 2, t e = β. (13) β 1 The above equation allows us to calculate the mechanical and electrical time constants t m and t e using the coefficients of the power series in (11). These coefficients can be obtained by curve fitting the motor speed step response data using power functions Estimation with the Disturbance Torque. Consider that the disturbance torque in the DC motor is not negligible. The disturbance transfer function is ω(s) T d (s) = (1/J)t m(t e s +1) t m t e s 2 + t m s +1. (14) Disturbance torque generally consists of the cogging torque and the friction torque. The cogging torque is quite complicated and is not addressed here. Both the kinetic and viscous frictions are considered and are assumed to be constant on average under a constant motor speed. Given a constant motor terminal voltage V(s) = V /s and the constant disturbance (ignore the cogging torque or consider the average cogging torque effecton speed over one revolution is zero) T d (s) = T /s, the speed response is ω(s) = 1/ V t m t e s 2 + t m s +1 s + (1/J)t m(t e s +1) T t m t e s 2 + t m s +1 s. (15) As in the previous section, applying the partial fraction expansion of the step response in the Laplace domain, then expanding the exponential terms in the time domain using the Taylor series, we obtain the total step response in the time domain: ω(t) = β t + β 1 t 2 β 2 t 3 + β 3 t 4. (16) Based on these coefficients, we have ab = 18β2 2 24β 3 β 1 3β β 2 +2β1 2, a + b = 6β 2 β ab 2β 1, and another equation for a + b: (17) a + b = 12β 3 + β 1 ab 2β 2. (18)
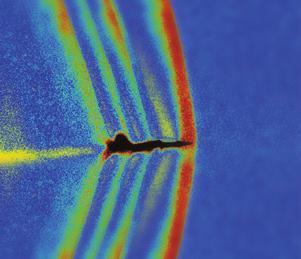
3 Modelling and Simulation in Engineering 3 Table 1: RK37CA parameter values. Parameter Value Unit Terminal resistance 17 ± 15% Ω Terminal inductance N/A Henry Torque constant 18.3 ± 18% mnm/a Mass moment of inertia 9. gcm 2 Counter-electromotive force.233 volt/(rad/sec) Then, we can express the motor parameters as t m = a + b ab, t e = 1 a + b, T = β, J = ab 2β 1 V. (19) In practice, fit the measured motor speed step response using power functions according to (16); then calculate the motor parameters using (19). Remark 1. Another relationship useful for checking the algorithm is based on the steady-state response of (15), expressed by the following equation: V + β t m = ω ss, (2) where β = T /J and ω ss is the motor steady-state angular speed. 3. Implementation and Results The proposed approaches were first applied to a Mabuchi RK37CA motor, then a Mabuchi FC13 motor. To implement the algorithms, a LabVIEW program was created to interface a pulse width modulated (PWM) motor drive and an optical encoder with quadrature digital outputs mounted on the motor shaft. The determinism of the sample time was assured by the LabVIEW real-time module. And, a national instrument (NI) LabVIEW FPGA (field programmable gate array) card was utilized to process the digital quadrature encoder signals to obtain the motor speed and to control the motor PWM drive. Values of the motor parameters given in the motor specifications for reference are presented in Table 1. Note that the Back-EMF and torque constant are not equal (although it should be theoretically). Inductance value is not given and was measured as 2.25 Henry. The resistance was measured as 16.4 Ω. Thus we calculated t e = L/R =.122 sec. First, apply the algorithm for no-disturbance torque. To apply this algorithm, the speed response part due to the voltage input is assumed to dominate. To meet this condition, Parameter w/o dist. 2 v Table 2: RK37CA test results. w/dist. 2v/1v Spec. (meas.) Unit k t / ± 18% Nm/A t m / sec t e /.134 (.122) sec T /J N/A 1.551/ N/A Nm/kgm 2 Velocity (ips) Time (ms) 1 Figure 1: Approach w/consideration of disturbance under 2 volt input: black, measurement: red, power series fitted. for example, the speed variation at the steady-state is small compared to the steady-state speed, we send a large voltage to the motor drive, V = 2 volt. Next, we apply the approach for disturbance torque. The disturbances, that is, friction, effects on the speed response are significant when the input voltage is small. To demonstrate the effectiveness of the algorithm, we sent two voltages, 2 volt and 1 volt, to the motor. Driving the motor at two different voltage levels can demonstrate that the viscous friction varies with the speed, also can allow us to calculate the viscous damping coefficient. Usually t e is very small compared to t m a good estimate of both t e and t m at the same time is difficult. Because t m is usually much larger than t e, t m and t e were estimated separately using different data collected with different sample rates and different time durations. For estimating t m, the motor speed in both the transient phase and the steady-state was sampled at 1 khz for one second; for estimating t e, the motor speed in the transient phase was sampled at 8 khz for 2 msec. In each test, the motor was driven multiple times and parameter estimates were averaged. Results are summarized in Table 2. Column two gives the values estimated using the algorithm for no disturbance, and column three gives the values obtained using the algorithm considering disturbance; values in the fourth column are computed using values from Table 1. Note that R = 17 Ω, J = 9gcm 2, =.233 volt/(rad/sec), and k t =.183 Nm/A are used to calculate t m in the fourth column of the table. According to Table 2, the estimates of k t, t m,andt e are in good agreement with those given by the motor specifications. Time responses sampled at 1 khz for 1 s are given in Figures 1, 2 and 3. In these figures, red curves represent the power series, n i=1 x i t i, resulting from curve fitting the motor
4 4 Modelling and Simulation in Engineering Table 3: FC13 test results. Parameter w/dist. Spec. Unit k t ± 1% Nm/A t m sec t e msec speed responses. Comparing these figures, it is obvious that the approach with disturbance consideration approximates the measurements much better, because of the existence of the linear term, β t, in the power series due to the presence of the constant disturbance in the motor. To further demonstrate the effectiveness of the proposed algorithms, we compared them to conventional identification approaches. First, we drove the motor using random voltage input (1 volts maximum) and measured the motor speed at a sampling rate of 1 khz. Then, the motor/drive frequency response function was calculated through spectral analysis. Based on the calculated frequency response data, we used Matlab system identification toolbox to identify a second-order model. Various methods, that is, subspace approach in the system identification toolbox, were tried and compared. The best model found was 978 T(s) = s s (21) Using the model coefficients, we get t m =.177 sec, t e = 3msec, (22) k t =.31 volts/(rad/sec). These estimates are bad, especially the electrical time constant t e due to the very small time scale as alluded to earlier. Remark 2. T /J may be used to calculate the friction (both kinetic and viscous)if J is known. First, calculate the viscous friction coefficient c = (T 1 T )/(ω 1 ω ). Then, calculate the dynamic friction, T f = T cω.forexample,ω = 1.21 ips under 2 volt, ω 1 = ips under 1 volt, J = 9.gcm 2, and it renders c =.187 mnm/ips. Remark 3. The number of terms in the power series included for fitting the data was determined through trial and error. When disturbance was not considered, twenty-five terms were included; when disturbance was considered, including forty terms gave the best results. Since the coefficients were calculated using the polynomial curve fitting function from the math library provided inside LabVIEW, it was not difficult and time consuming to try different number of terms. Including more terms does not necessarily improve the parameter estimation accuracy. A Mabuchi FC13 motor was tested as well. It is a smaller motor compared to RK37. Good results were obtained again this time; see Table 3. Note the very small t e in this small motor. Algorithm considering disturbance torque was applied. In the testing, 1 volts was used as the motor drive input. For t m estimation, the speed response was sampled at 1 Hz for 5 samples, while for t e estimation, it was sampled at 6 Hz for 85 samples. Velocity (ips) Time (ms) Figure 2: Approach w/o consideration of disturbance under 2 volt input: black, measurement: red, power series fitted. Velocity (ips) Time (ms) Figure 3: Approach w/o consideration of disturbance under 2 volt input:black, measurement: Red, power series fitted. 4. Conclusions A convenient, effectivesystemidentification approachis proposed to estimate the DC motor torque constant, mechanical time constant, electrical time constant, and friction. This approach was implemented on two Mabuchi motors, and the great test results were presented. This open-loop method requires little hardware, only a speed/position sensor and a voltage supply. The estimated motor parameters can be used to verify the DC motor performance or be used to build a model of the motor for the subsequent controller design or system optimization. This approach is especially suited to quick field applications. Appendix Coefficients for no disturbance case are as follows: β = ab, β 1 = ab(a + b), β 2 = ab ( a 2 + ab + b 2). (A.1)
5 Modelling and Simulation in Engineering 5 Coefficients for disturbance case are as follows: β = T J, β 1 = 1 V ab, 2 β 2 = 1 [ V ab(a + b) T ( a 2 + ab + b 2) 6 J + T ] J t mab(a + b), β 3 = 1 [ V ab ( a 2 + ab + b 2) T ( a 3 + a 2 b + ab 2 + b 3) 24 J References + T J t mab ( a 2 + ab + b 2) ]. (A.2) [1] L. Ljiung, System Identification: Theory for the User, Prentice Hall, 2nd edition, [2] H. Unbehauen and G. P. Rao, A review of identification in continuous-time systems, Annual Reviews in Control, vol. 22, pp , [3] G. F. Franklin, J. D. Powell, and M. L. Workman, Digital Control of Dynamic Systems, Addison Wesley, 2nd edition, 199. [4] J. C. Basilio and M. V. Moreira, State-space parameter identification in a second control laboratory, IEEE Transactions on Education, vol. 47, no. 2, pp , 24. [5] G. Mamani, J. Becedas, H. Sira-Ramirez, and V. Feliu Batlle, Open-loop algebraic identification method for DC motors, in Proceedings of the European Control Conference, Kos, Greece, 27. [6] G. Mamani, J. Becedas, and V. Feliu-Batlle, On-line fast algebraic parameter and state estimation for a DC motor applied to adaptive 16 control, in Proceedings of the World Congress on Engineering, London, UK, 28. [7] R. Krneta, S. Antic, and D. Stojanovic, Recursive least square method in parameters identification of DC motors models, Facta Universitatis, vol. 18, no. 3, pp , 25. [8] M. Hadef and M. R. Mekideche, Parameter identification of a separately excited DC motor via inverse problem methodology, in Proceedings of the Ecologic Vehicles andrenewable Energies, Monaco, France, 29. [9] M. Ruderman, J. Krettek, F. Hoffman, and T. Betran, Optimal state space control of DC motor, in Proceedings of the 17th World Congress IFAC, pp , Seoul, Korea, 28. [1] M. Hadef, A. Bourouina, and M. R. Mekideche, Parameter identification of a DC motor via moments method, International Electrical and Power Engineering,vol.1,no.2, pp , 28. [11] A. Rubaai and R. Kotaru, Online identification and control of a dc motor using learning adaptation of neural networks, IEEE Transactions on Industry Applications, vol.36,no.3,pp , 2.

















6 Rotating Machinery Engineering The Scientific World Journal Distributed Sensor Networks Sensors Control Science and Engineering Advances in Civil Engineering Submit your manuscripts at Electrical and Computer Engineering Robotics VLSI Design Advances in OptoElectronics Navigation and Observation Chemical Engineering Active and Passive Electronic Components Antennas and Propagation Aerospace Engineering Volume 21 Modelling & Simulation in Engineering Shock and Vibration Advances in Acoustics and Vibration
Disturbance Compensation for DC Motor Mechanism Low Speed Regulation : A Feedforward and Feedback Implementation
 211 5th IEEE Conference on Decision and Control and European Control Conference (CDC-ECC) Orlando, FL, USA, December 12-15, 211 Disturbance Compensation for DC Motor Mechanism Low Speed Regulation : A
211 5th IEEE Conference on Decision and Control and European Control Conference (CDC-ECC) Orlando, FL, USA, December 12-15, 211 Disturbance Compensation for DC Motor Mechanism Low Speed Regulation : A
FEEDBACK CONTROL SYSTEMS
 FEEDBAC CONTROL SYSTEMS. Control System Design. Open and Closed-Loop Control Systems 3. Why Closed-Loop Control? 4. Case Study --- Speed Control of a DC Motor 5. Steady-State Errors in Unity Feedback Control
FEEDBAC CONTROL SYSTEMS. Control System Design. Open and Closed-Loop Control Systems 3. Why Closed-Loop Control? 4. Case Study --- Speed Control of a DC Motor 5. Steady-State Errors in Unity Feedback Control
Quanser NI-ELVIS Trainer (QNET) Series: QNET Experiment #02: DC Motor Position Control. DC Motor Control Trainer (DCMCT) Student Manual
 Series: QNET Experiment #02: DC Motor Position Control. DC Motor Control Trainer (DCMCT) Student Manual") Quanser NI-ELVIS Trainer (QNET) Series: QNET Experiment #02: DC Motor Position Control DC Motor Control Trainer (DCMCT) Student Manual Table of Contents 1 Laboratory Objectives1 2 References1 3 DCMCT Plant
Quanser NI-ELVIS Trainer (QNET) Series: QNET Experiment #02: DC Motor Position Control DC Motor Control Trainer (DCMCT) Student Manual Table of Contents 1 Laboratory Objectives1 2 References1 3 DCMCT Plant
PID Controller Design for DC Motor
 Contemporary Engineering Sciences, Vol. 11, 2018, no. 99, 4913-4920 HIKARI Ltd, www.m-hikari.com https://doi.org/10.12988/ces.2018.810539 PID Controller Design for DC Motor Juan Pablo Trujillo Lemus Department
Contemporary Engineering Sciences, Vol. 11, 2018, no. 99, 4913-4920 HIKARI Ltd, www.m-hikari.com https://doi.org/10.12988/ces.2018.810539 PID Controller Design for DC Motor Juan Pablo Trujillo Lemus Department
Research Article The Microphone Feedback Analogy for Chatter in Machining
 Shock and Vibration Volume 215, Article ID 976819, 5 pages http://dx.doi.org/1.1155/215/976819 Research Article The Microphone Feedback Analogy for Chatter in Machining Tony Schmitz UniversityofNorthCarolinaatCharlotte,Charlotte,NC28223,USA
Shock and Vibration Volume 215, Article ID 976819, 5 pages http://dx.doi.org/1.1155/215/976819 Research Article The Microphone Feedback Analogy for Chatter in Machining Tony Schmitz UniversityofNorthCarolinaatCharlotte,Charlotte,NC28223,USA
Research Article Experimental Parametric Identification of a Flexible Beam Using Piezoelectric Sensors and Actuators
 Shock and Vibration, Article ID 71814, 5 pages http://dx.doi.org/1.1155/214/71814 Research Article Experimental Parametric Identification of a Flexible Beam Using Piezoelectric Sensors and Actuators Sajad
Shock and Vibration, Article ID 71814, 5 pages http://dx.doi.org/1.1155/214/71814 Research Article Experimental Parametric Identification of a Flexible Beam Using Piezoelectric Sensors and Actuators Sajad
Research Article Doppler Velocity Estimation of Overlapping Linear-Period-Modulated Ultrasonic Waves Based on an Expectation-Maximization Algorithm
 Advances in Acoustics and Vibration, Article ID 9876, 7 pages http://dx.doi.org/.55//9876 Research Article Doppler Velocity Estimation of Overlapping Linear-Period-Modulated Ultrasonic Waves Based on an
Advances in Acoustics and Vibration, Article ID 9876, 7 pages http://dx.doi.org/.55//9876 Research Article Doppler Velocity Estimation of Overlapping Linear-Period-Modulated Ultrasonic Waves Based on an
Research Article Trapped-Mode Resonance Regime of Thin Microwave Electromagnetic Arrays with Two Concentric Rings in Unit Cell
 Microwave Science and Technology Volume 2, Article ID 3688, 6 pages doi:.55/2/3688 Research Article Trapped-Mode Resonance Regime of Thin Microwave Electromagnetic Arrays with Two Concentric Rings in Unit
Microwave Science and Technology Volume 2, Article ID 3688, 6 pages doi:.55/2/3688 Research Article Trapped-Mode Resonance Regime of Thin Microwave Electromagnetic Arrays with Two Concentric Rings in Unit
Research Article Simplified Robotics Joint-Space Trajectory Generation with a via Point Using a Single Polynomial
 Robotics Volume, Article ID 75958, 6 pages http://dx.doi.org/.55//75958 Research Article Simplified Robotics Joint-Space Trajectory Generation with a via Point Using a Single Polynomial Robert L. Williams
Robotics Volume, Article ID 75958, 6 pages http://dx.doi.org/.55//75958 Research Article Simplified Robotics Joint-Space Trajectory Generation with a via Point Using a Single Polynomial Robert L. Williams
Mechatronics Engineering. Li Wen
 Mechatronics Engineering Li Wen Bio-inspired robot-dc motor drive Unstable system Mirko Kovac,EPFL Modeling and simulation of the control system Problems 1. Why we establish mathematical model of the control
Mechatronics Engineering Li Wen Bio-inspired robot-dc motor drive Unstable system Mirko Kovac,EPFL Modeling and simulation of the control system Problems 1. Why we establish mathematical model of the control
SIMULATION OF STEADY-STATE PERFORMANCE OF THREE PHASE INDUCTION MOTOR BY MATLAB
 olume No.0, Issue No. 08, August 014 ISSN (online): 48 7550 SIMULATION OF STEADY-STATE PERFORMANCE OF THREE PHASE INDUCTION MOTOR BY MATLAB Harish Kumar Mishra 1, Dr.Anurag Tripathi 1 Research Scholar,
olume No.0, Issue No. 08, August 014 ISSN (online): 48 7550 SIMULATION OF STEADY-STATE PERFORMANCE OF THREE PHASE INDUCTION MOTOR BY MATLAB Harish Kumar Mishra 1, Dr.Anurag Tripathi 1 Research Scholar,
Research Article A New Type of Magnetic Actuator Capable of Wall-Climbing Movement Using Inertia Force
 Engineering Volume 14, Article ID 93178, 6 pages http://dx.doi.org/1.1155/14/93178 Research Article A New Type of Magnetic Actuator Capable of Wall-Climbing Movement Using Inertia Force H. Yaguchi, S.
Engineering Volume 14, Article ID 93178, 6 pages http://dx.doi.org/1.1155/14/93178 Research Article A New Type of Magnetic Actuator Capable of Wall-Climbing Movement Using Inertia Force H. Yaguchi, S.
Open Access Permanent Magnet Synchronous Motor Vector Control Based on Weighted Integral Gain of Sliding Mode Variable Structure
 Send Orders for Reprints to reprints@benthamscienceae The Open Automation and Control Systems Journal, 5, 7, 33-33 33 Open Access Permanent Magnet Synchronous Motor Vector Control Based on Weighted Integral
Send Orders for Reprints to reprints@benthamscienceae The Open Automation and Control Systems Journal, 5, 7, 33-33 33 Open Access Permanent Magnet Synchronous Motor Vector Control Based on Weighted Integral
Research Article Propagation Characteristics of Oblique Incident Terahertz Wave in Nonuniform Dusty Plasma
 Antennas and Propagation Volume 216, Article ID 945473, 6 pages http://dx.doi.org/1.1155/216/945473 Research Article Propagation Characteristics of Oblique Incident Terahert Wave in Nonuniform Dusty Plasma
Antennas and Propagation Volume 216, Article ID 945473, 6 pages http://dx.doi.org/1.1155/216/945473 Research Article Propagation Characteristics of Oblique Incident Terahert Wave in Nonuniform Dusty Plasma
Mathematical Modeling and Dynamic Simulation of a Class of Drive Systems with Permanent Magnet Synchronous Motors
 Applied and Computational Mechanics 3 (2009) 331 338 Mathematical Modeling and Dynamic Simulation of a Class of Drive Systems with Permanent Magnet Synchronous Motors M. Mikhov a, a Faculty of Automatics,
Applied and Computational Mechanics 3 (2009) 331 338 Mathematical Modeling and Dynamic Simulation of a Class of Drive Systems with Permanent Magnet Synchronous Motors M. Mikhov a, a Faculty of Automatics,
DEVELOPMENT OF DIRECT TORQUE CONTROL MODELWITH USING SVI FOR THREE PHASE INDUCTION MOTOR
 DEVELOPMENT OF DIRECT TORQUE CONTROL MODELWITH USING SVI FOR THREE PHASE INDUCTION MOTOR MUKESH KUMAR ARYA * Electrical Engg. Department, Madhav Institute of Technology & Science, Gwalior, Gwalior, 474005,
DEVELOPMENT OF DIRECT TORQUE CONTROL MODELWITH USING SVI FOR THREE PHASE INDUCTION MOTOR MUKESH KUMAR ARYA * Electrical Engg. Department, Madhav Institute of Technology & Science, Gwalior, Gwalior, 474005,
Mathematical Modeling and Dynamic Simulation of DC Motors using MATLAB/Simulink Environment
 Mathematical Modeling and Dynamic Simulation of DC Motors using MATLAB/Simulink Environment K. Kalaiselvi 1, K.Abinaya 2, P. Ramesh Babu 3 1,2 Under Graduate Scholar, Department of EEE, Saranathan College
Mathematical Modeling and Dynamic Simulation of DC Motors using MATLAB/Simulink Environment K. Kalaiselvi 1, K.Abinaya 2, P. Ramesh Babu 3 1,2 Under Graduate Scholar, Department of EEE, Saranathan College
Parameter Prediction and Modelling Methods for Traction Motor of Hybrid Electric Vehicle
 Page 359 World Electric Vehicle Journal Vol. 3 - ISSN 232-6653 - 29 AVERE Parameter Prediction and Modelling Methods for Traction Motor of Hybrid Electric Vehicle Tao Sun, Soon-O Kwon, Geun-Ho Lee, Jung-Pyo
Page 359 World Electric Vehicle Journal Vol. 3 - ISSN 232-6653 - 29 AVERE Parameter Prediction and Modelling Methods for Traction Motor of Hybrid Electric Vehicle Tao Sun, Soon-O Kwon, Geun-Ho Lee, Jung-Pyo
ENGG4420 LECTURE 7. CHAPTER 1 BY RADU MURESAN Page 1. September :29 PM
 CHAPTER 1 BY RADU MURESAN Page 1 ENGG4420 LECTURE 7 September 21 10 2:29 PM MODELS OF ELECTRIC CIRCUITS Electric circuits contain sources of electric voltage and current and other electronic elements such
CHAPTER 1 BY RADU MURESAN Page 1 ENGG4420 LECTURE 7 September 21 10 2:29 PM MODELS OF ELECTRIC CIRCUITS Electric circuits contain sources of electric voltage and current and other electronic elements such
Research Article Partial Pole Placement in LMI Region
 Control Science and Engineering Article ID 84128 5 pages http://dxdoiorg/11155/214/84128 Research Article Partial Pole Placement in LMI Region Liuli Ou 1 Shaobo Han 2 Yongji Wang 1 Shuai Dong 1 and Lei
Control Science and Engineering Article ID 84128 5 pages http://dxdoiorg/11155/214/84128 Research Article Partial Pole Placement in LMI Region Liuli Ou 1 Shaobo Han 2 Yongji Wang 1 Shuai Dong 1 and Lei
Research Article Two Mathematical Models for Generation of Crowned Tooth Surface
 e Scientific World Journal, Article ID 6409, 6 pages http://dx.doi.org/0.55/204/6409 Research Article Two Mathematical Models for Generation of Crowned Tooth Surface Laszlo Kelemen and Jozsef Szente University
e Scientific World Journal, Article ID 6409, 6 pages http://dx.doi.org/0.55/204/6409 Research Article Two Mathematical Models for Generation of Crowned Tooth Surface Laszlo Kelemen and Jozsef Szente University
Fast Seek Control for Flexible Disk Drive Systems
 Fast Seek Control for Flexible Disk Drive Systems with Back EMF and Inductance Chanat La-orpacharapan and Lucy Y. Pao Department of Electrical and Computer Engineering niversity of Colorado, Boulder, CO
Fast Seek Control for Flexible Disk Drive Systems with Back EMF and Inductance Chanat La-orpacharapan and Lucy Y. Pao Department of Electrical and Computer Engineering niversity of Colorado, Boulder, CO
On-Line Fast Algebraic Parameter and State Estimation for a DC Motor Applied to Adaptive Control
 Proceedings of the World Congress on Engineering 28 Vol II WCE 28, July 2-4, 28, London, U.K. On-Line Fast Algebraic Parameter and State Estimation for a DC Motor Applied to Adaptive Control G. Mamani,
Proceedings of the World Congress on Engineering 28 Vol II WCE 28, July 2-4, 28, London, U.K. On-Line Fast Algebraic Parameter and State Estimation for a DC Motor Applied to Adaptive Control G. Mamani,
International Journal of Advance Engineering and Research Development SIMULATION OF FIELD ORIENTED CONTROL OF PERMANENT MAGNET SYNCHRONOUS MOTOR
 Scientific Journal of Impact Factor(SJIF): 3.134 e-issn(o): 2348-4470 p-issn(p): 2348-6406 International Journal of Advance Engineering and Research Development Volume 2,Issue 4, April -2015 SIMULATION
Scientific Journal of Impact Factor(SJIF): 3.134 e-issn(o): 2348-4470 p-issn(p): 2348-6406 International Journal of Advance Engineering and Research Development Volume 2,Issue 4, April -2015 SIMULATION
Research Article Travel-Time Difference Extracting in Experimental Study of Rayleigh Wave Acoustoelastic Effect
 ISRN Mechanical Engineering, Article ID 3492, 7 pages http://dx.doi.org/.55/24/3492 Research Article Travel-Time Difference Extracting in Experimental Study of Rayleigh Wave Acoustoelastic Effect Hu Eryi
ISRN Mechanical Engineering, Article ID 3492, 7 pages http://dx.doi.org/.55/24/3492 Research Article Travel-Time Difference Extracting in Experimental Study of Rayleigh Wave Acoustoelastic Effect Hu Eryi
INC 341 Feedback Control Systems: Lecture 3 Transfer Function of Dynamic Systems II
 INC 341 Feedback Control Systems: Lecture 3 Transfer Function of Dynamic Systems II Asst. Prof. Dr.-Ing. Sudchai Boonto Department of Control Systems and Instrumentation Engineering King Mongkut s University
INC 341 Feedback Control Systems: Lecture 3 Transfer Function of Dynamic Systems II Asst. Prof. Dr.-Ing. Sudchai Boonto Department of Control Systems and Instrumentation Engineering King Mongkut s University
3 Lab 3: DC Motor Transfer Function Estimation by Explicit Measurement
 3 Lab 3: DC Motor Transfer Function Estimation by Explicit Measurement 3.1 Introduction There are two common methods for determining a plant s transfer function. They are: 1. Measure all the physical parameters
3 Lab 3: DC Motor Transfer Function Estimation by Explicit Measurement 3.1 Introduction There are two common methods for determining a plant s transfer function. They are: 1. Measure all the physical parameters
Manufacturing Equipment Control
 QUESTION 1 An electric drive spindle has the following parameters: J m = 2 1 3 kg m 2, R a = 8 Ω, K t =.5 N m/a, K v =.5 V/(rad/s), K a = 2, J s = 4 1 2 kg m 2, and K s =.3. Ignore electrical dynamics
QUESTION 1 An electric drive spindle has the following parameters: J m = 2 1 3 kg m 2, R a = 8 Ω, K t =.5 N m/a, K v =.5 V/(rad/s), K a = 2, J s = 4 1 2 kg m 2, and K s =.3. Ignore electrical dynamics
CHAPTER 5 SIMULATION AND TEST SETUP FOR FAULT ANALYSIS
 47 CHAPTER 5 SIMULATION AND TEST SETUP FOR FAULT ANALYSIS 5.1 INTRODUCTION This chapter describes the simulation model and experimental set up used for the fault analysis. For the simulation set up, the
47 CHAPTER 5 SIMULATION AND TEST SETUP FOR FAULT ANALYSIS 5.1 INTRODUCTION This chapter describes the simulation model and experimental set up used for the fault analysis. For the simulation set up, the
ME 3210 Mechatronics II Laboratory Lab 4: DC Motor Characteristics
 ME 3210 Mechatronics II Laboratory Lab 4: DC Motor Characteristics Introduction Often, due to budget constraints or convenience, engineers must use whatever tools are available to create new or improved
ME 3210 Mechatronics II Laboratory Lab 4: DC Motor Characteristics Introduction Often, due to budget constraints or convenience, engineers must use whatever tools are available to create new or improved
Research Article Forward and Reverse Movements of a Linear Positioning Stage Based on the Parasitic Motion Principle
 Advances in Mechanical Engineering, Article ID 45256, 7 pages http://dx.doi.org/1.1155/214/45256 Research Article Forward and Reverse Movements of a Linear Positioning Stage Based on the Parasitic Motion
Advances in Mechanical Engineering, Article ID 45256, 7 pages http://dx.doi.org/1.1155/214/45256 Research Article Forward and Reverse Movements of a Linear Positioning Stage Based on the Parasitic Motion
Introduction to Controls
 EE 474 Review Exam 1 Name Answer each of the questions. Show your work. Note were essay-type answers are requested. Answer with complete sentences. Incomplete sentences will count heavily against the grade.
EE 474 Review Exam 1 Name Answer each of the questions. Show your work. Note were essay-type answers are requested. Answer with complete sentences. Incomplete sentences will count heavily against the grade.
Research Article Visible Light Communication System Using Silicon Photocell for Energy Gathering and Data Receiving
 Hindawi International Optics Volume 2017, Article ID 6207123, 5 pages https://doi.org/10.1155/2017/6207123 Research Article Visible Light Communication System Using Silicon Photocell for Energy Gathering
Hindawi International Optics Volume 2017, Article ID 6207123, 5 pages https://doi.org/10.1155/2017/6207123 Research Article Visible Light Communication System Using Silicon Photocell for Energy Gathering
Digital Control Semester Project
 Digital Control Semester Project Part I: Transform-Based Design 1 Introduction For this project you will be designing a digital controller for a system which consists of a DC motor driving a shaft with
Digital Control Semester Project Part I: Transform-Based Design 1 Introduction For this project you will be designing a digital controller for a system which consists of a DC motor driving a shaft with
Lab 3: Quanser Hardware and Proportional Control
 Lab 3: Quanser Hardware and Proportional Control The worst wheel of the cart makes the most noise. Benjamin Franklin 1 Objectives The goal of this lab is to: 1. familiarize you with Quanser s QuaRC tools
Lab 3: Quanser Hardware and Proportional Control The worst wheel of the cart makes the most noise. Benjamin Franklin 1 Objectives The goal of this lab is to: 1. familiarize you with Quanser s QuaRC tools
Research Article Trial Application of Pulse-Field Magnetization to Magnetically Levitated Conveyor System
 Advances in Condensed Matter Physics Volume 2, Article ID 5657, pages doi:1.1155/2/5657 Research Article Trial Application of Pulse-Field Magnetization to Magnetically Levitated Conveyor System Yoshihito
Advances in Condensed Matter Physics Volume 2, Article ID 5657, pages doi:1.1155/2/5657 Research Article Trial Application of Pulse-Field Magnetization to Magnetically Levitated Conveyor System Yoshihito
Real-Time Implementation of a LQR-Based Controller for the Stabilization of a Double Inverted Pendulum
 Proceedings of the International MultiConference of Engineers and Computer Scientists 017 Vol I,, March 15-17, 017, Hong Kong Real-Time Implementation of a LQR-Based Controller for the Stabilization of
Proceedings of the International MultiConference of Engineers and Computer Scientists 017 Vol I,, March 15-17, 017, Hong Kong Real-Time Implementation of a LQR-Based Controller for the Stabilization of
Research Letter An Algorithm to Generate Representations of System Identification Errors
 Research Letters in Signal Processing Volume 008, Article ID 5991, 4 pages doi:10.1155/008/5991 Research Letter An Algorithm to Generate Representations of System Identification Errors Wancheng Zhang and
Research Letters in Signal Processing Volume 008, Article ID 5991, 4 pages doi:10.1155/008/5991 Research Letter An Algorithm to Generate Representations of System Identification Errors Wancheng Zhang and
Coupled Drive Apparatus Modelling and Simulation
 University of Ljubljana Faculty of Electrical Engineering Victor Centellas Gil Coupled Drive Apparatus Modelling and Simulation Diploma thesis Menthor: prof. dr. Maja Atanasijević-Kunc Ljubljana, 2015
University of Ljubljana Faculty of Electrical Engineering Victor Centellas Gil Coupled Drive Apparatus Modelling and Simulation Diploma thesis Menthor: prof. dr. Maja Atanasijević-Kunc Ljubljana, 2015
Transient Analysis of Separately Excited DC Motor and Braking of DC Motor Using Numerical Technique
 Journal homepage: www.mjret.in ISSN:2348-6953 Transient Analysis of Separately Excited DC Motor and Braking of DC Motor Using Numerical Technique Pavan R Patil, Javeed Kittur, Pavankumar M Pattar, Prajwal
Journal homepage: www.mjret.in ISSN:2348-6953 Transient Analysis of Separately Excited DC Motor and Braking of DC Motor Using Numerical Technique Pavan R Patil, Javeed Kittur, Pavankumar M Pattar, Prajwal
A FORCE BALANCE TECHNIQUE FOR MEASUREMENT OF YOUNG'S MODULUS. 1 Introduction
 A FORCE BALANCE TECHNIQUE FOR MEASUREMENT OF YOUNG'S MODULUS Abhinav A. Kalamdani Dept. of Instrumentation Engineering, R. V. College of Engineering, Bangalore, India. kalamdani@ieee.org Abstract: A new
A FORCE BALANCE TECHNIQUE FOR MEASUREMENT OF YOUNG'S MODULUS Abhinav A. Kalamdani Dept. of Instrumentation Engineering, R. V. College of Engineering, Bangalore, India. kalamdani@ieee.org Abstract: A new
LOW FREQUENCY NOISE OF TANTALUM CAPACITORS*
 Active and Passive Elec. Comp., 2002, Vol. 25, pp. 161 167 LOW FREQUENCY NOISE OF TANTALUM CAPACITORS* J. SIKULA a,{, J. HLAVKA a, J. PAVELKA a, V. SEDLAKOVA a, L. GRMELA a, M. TACANO b and S. HASHIGUCHI
Active and Passive Elec. Comp., 2002, Vol. 25, pp. 161 167 LOW FREQUENCY NOISE OF TANTALUM CAPACITORS* J. SIKULA a,{, J. HLAVKA a, J. PAVELKA a, V. SEDLAKOVA a, L. GRMELA a, M. TACANO b and S. HASHIGUCHI
Automatic Control Systems. -Lecture Note 15-
 -Lecture Note 15- Modeling of Physical Systems 5 1/52 AC Motors AC Motors Classification i) Induction Motor (Asynchronous Motor) ii) Synchronous Motor 2/52 Advantages of AC Motors i) Cost-effective ii)
-Lecture Note 15- Modeling of Physical Systems 5 1/52 AC Motors AC Motors Classification i) Induction Motor (Asynchronous Motor) ii) Synchronous Motor 2/52 Advantages of AC Motors i) Cost-effective ii)
MODELING AND SIMULATION OF ENGINE DRIVEN INDUCTION GENERATOR USING HUNTING NETWORK METHOD
 MODELING AND SIMULATION OF ENGINE DRIVEN INDUCTION GENERATOR USING HUNTING NETWORK METHOD K. Ashwini 1, G. N. Sreenivas 1 and T. Giribabu 2 1 Department of Electrical and Electronics Engineering, JNTUH
MODELING AND SIMULATION OF ENGINE DRIVEN INDUCTION GENERATOR USING HUNTING NETWORK METHOD K. Ashwini 1, G. N. Sreenivas 1 and T. Giribabu 2 1 Department of Electrical and Electronics Engineering, JNTUH
Reduction of the effect of floor vibrations in a checkweigher using an electromagnetic force balance system
 ACTA IMEKO ISSN: 1 870X July 017, Volume 6 Number, 65 69 Reduction of the effect of floor vibrations in a checkweigher using an electromagnetic force balance system Yuji Yamakawa 1, Takanori Yamazaki 1
ACTA IMEKO ISSN: 1 870X July 017, Volume 6 Number, 65 69 Reduction of the effect of floor vibrations in a checkweigher using an electromagnetic force balance system Yuji Yamakawa 1, Takanori Yamazaki 1
ECEN 420 LINEAR CONTROL SYSTEMS. Lecture 6 Mathematical Representation of Physical Systems II 1/67
 1/67 ECEN 420 LINEAR CONTROL SYSTEMS Lecture 6 Mathematical Representation of Physical Systems II State Variable Models for Dynamic Systems u 1 u 2 u ṙ. Internal Variables x 1, x 2 x n y 1 y 2. y m Figure
1/67 ECEN 420 LINEAR CONTROL SYSTEMS Lecture 6 Mathematical Representation of Physical Systems II State Variable Models for Dynamic Systems u 1 u 2 u ṙ. Internal Variables x 1, x 2 x n y 1 y 2. y m Figure
MATHEMATICAL MODELING OF OPEN LOOP PMDC MOTOR USING MATLAB/SIMULINK
 MATHEMATICAL MODELING OF OPEN LOOP PMDC MOTOR USING MATLAB/SIMULINK 1 Mr.Dhaval K.Patel 1 Assistant Professor, Dept. of Electrical Engineering. Gidc Degree Engineering College Abrama, Navsari. ABSTRACT:
MATHEMATICAL MODELING OF OPEN LOOP PMDC MOTOR USING MATLAB/SIMULINK 1 Mr.Dhaval K.Patel 1 Assistant Professor, Dept. of Electrical Engineering. Gidc Degree Engineering College Abrama, Navsari. ABSTRACT:
MECHATRONICS ENGINEERING TECHNOLOGY. Modeling a Servo Motor System
 Modeling a Servo Motor System Definitions Motor: A device that receives a continuous (Analog) signal and operates continuously in time. Digital Controller: Discretizes the amplitude of the signal and also
Modeling a Servo Motor System Definitions Motor: A device that receives a continuous (Analog) signal and operates continuously in time. Digital Controller: Discretizes the amplitude of the signal and also
Research Article Numerical Study of Flutter of a Two-Dimensional Aeroelastic System
 ISRN Mechanical Volume 213, Article ID 127123, 4 pages http://dx.doi.org/1.1155/213/127123 Research Article Numerical Study of Flutter of a Two-Dimensional Aeroelastic System Riccy Kurniawan Department
ISRN Mechanical Volume 213, Article ID 127123, 4 pages http://dx.doi.org/1.1155/213/127123 Research Article Numerical Study of Flutter of a Two-Dimensional Aeroelastic System Riccy Kurniawan Department
DC Motor Position: System Modeling
 1 of 7 01/03/2014 22:07 Tips Effects TIPS ABOUT BASICS INDEX NEXT INTRODUCTION CRUISE CONTROL MOTOR SPEED MOTOR POSITION SUSPENSION INVERTED PENDULUM SYSTEM MODELING ANALYSIS DC Motor Position: System
1 of 7 01/03/2014 22:07 Tips Effects TIPS ABOUT BASICS INDEX NEXT INTRODUCTION CRUISE CONTROL MOTOR SPEED MOTOR POSITION SUSPENSION INVERTED PENDULUM SYSTEM MODELING ANALYSIS DC Motor Position: System
Full Order Observer Controller Design for DC Motor Based on State Space Approach
 ISSN (Online): 2319-764 Index Copernicus Value (213): 6.14 Impact Factor (214): 5.611 Full Order Observer Controller Design for DC Motor Based on State Space Approach Debabrata Pal Aksum University, College
ISSN (Online): 2319-764 Index Copernicus Value (213): 6.14 Impact Factor (214): 5.611 Full Order Observer Controller Design for DC Motor Based on State Space Approach Debabrata Pal Aksum University, College
King Saud University
 motor speed (rad/sec) Closed Loop Step Response ing Saud University College of Engineering, Electrical Engineering Department Labwork Manual EE 356 Control and Instrumentation Laboratory (كهر 356 معمل
motor speed (rad/sec) Closed Loop Step Response ing Saud University College of Engineering, Electrical Engineering Department Labwork Manual EE 356 Control and Instrumentation Laboratory (كهر 356 معمل
Research Article Emissivity Measurement of Semitransparent Textiles
 Advances in Optical Technologies Volume 2012, Article ID 373926, 5 pages doi:10.1155/2012/373926 Research Article Emissivity Measurement of Semitransparent Textiles P. Bison, A. Bortolin, G. Cadelano,
Advances in Optical Technologies Volume 2012, Article ID 373926, 5 pages doi:10.1155/2012/373926 Research Article Emissivity Measurement of Semitransparent Textiles P. Bison, A. Bortolin, G. Cadelano,
DcMotor_ Model Help File
 Name of Model: DcMotor_021708 Author: Vladimir L. Chervyakov Date: 2002-10-26 Executable file name DcMotor_021708.vtm Version number: 1.0 Description This model represents a Nonlinear model of a permanent
Name of Model: DcMotor_021708 Author: Vladimir L. Chervyakov Date: 2002-10-26 Executable file name DcMotor_021708.vtm Version number: 1.0 Description This model represents a Nonlinear model of a permanent
Video 5.1 Vijay Kumar and Ani Hsieh
 Video 5.1 Vijay Kumar and Ani Hsieh Robo3x-1.1 1 The Purpose of Control Input/Stimulus/ Disturbance System or Plant Output/ Response Understand the Black Box Evaluate the Performance Change the Behavior
Video 5.1 Vijay Kumar and Ani Hsieh Robo3x-1.1 1 The Purpose of Control Input/Stimulus/ Disturbance System or Plant Output/ Response Understand the Black Box Evaluate the Performance Change the Behavior
Research Article Robust Switching Control Strategy for a Transmission System with Unknown Backlash
 Mathematical Problems in Engineering Volume 24, Article ID 79384, 8 pages http://dx.doi.org/.55/24/79384 Research Article Robust Switching Control Strategy for a Transmission System with Unknown Backlash
Mathematical Problems in Engineering Volume 24, Article ID 79384, 8 pages http://dx.doi.org/.55/24/79384 Research Article Robust Switching Control Strategy for a Transmission System with Unknown Backlash
Research Article Weather Forecasting Using Sliding Window Algorithm
 ISRN Signal Processing Volume 23, Article ID 5654, 5 pages http://dx.doi.org/.55/23/5654 Research Article Weather Forecasting Using Sliding Window Algorithm Piyush Kapoor and Sarabjeet Singh Bedi 2 KvantumInc.,Gurgaon22,India
ISRN Signal Processing Volume 23, Article ID 5654, 5 pages http://dx.doi.org/.55/23/5654 Research Article Weather Forecasting Using Sliding Window Algorithm Piyush Kapoor and Sarabjeet Singh Bedi 2 KvantumInc.,Gurgaon22,India
Sensorless DTC-SVM of Induction Motor by Applying Two Neural Controllers
 Sensorless DTC-SVM of Induction Motor by Applying Two Neural Controllers Abdallah Farahat Mahmoud Dept. of Electrical Engineering, Al-Azhar University, Qena, Egypt engabdallah2012@azhar.edu.eg Adel S.
Sensorless DTC-SVM of Induction Motor by Applying Two Neural Controllers Abdallah Farahat Mahmoud Dept. of Electrical Engineering, Al-Azhar University, Qena, Egypt engabdallah2012@azhar.edu.eg Adel S.
Mechatronic System Case Study: Rotary Inverted Pendulum Dynamic System Investigation
 Mechatronic System Case Study: Rotary Inverted Pendulum Dynamic System Investigation Dr. Kevin Craig Greenheck Chair in Engineering Design & Professor of Mechanical Engineering Marquette University K.
Mechatronic System Case Study: Rotary Inverted Pendulum Dynamic System Investigation Dr. Kevin Craig Greenheck Chair in Engineering Design & Professor of Mechanical Engineering Marquette University K.
THE REACTION WHEEL PENDULUM
 THE REACTION WHEEL PENDULUM By Ana Navarro Yu-Han Sun Final Report for ECE 486, Control Systems, Fall 2013 TA: Dan Soberal 16 December 2013 Thursday 3-6pm Contents 1. Introduction... 1 1.1 Sensors (Encoders)...
THE REACTION WHEEL PENDULUM By Ana Navarro Yu-Han Sun Final Report for ECE 486, Control Systems, Fall 2013 TA: Dan Soberal 16 December 2013 Thursday 3-6pm Contents 1. Introduction... 1 1.1 Sensors (Encoders)...
AN EXPERIMENTAL WEB TENSION CONTROL SYSTEM: SYSTEM SET-UP
 Advances in Production Engineering & Management 2 (2007) 4, 185-193 ISSN 1854-6250 Professional paper AN EXPERIMENTAL WEB TENSION CONTROL SYSTEM: SYSTEM SET-UP Giannoccaro, N.I. * ; Oishi, K. ** & Sakamoto,
Advances in Production Engineering & Management 2 (2007) 4, 185-193 ISSN 1854-6250 Professional paper AN EXPERIMENTAL WEB TENSION CONTROL SYSTEM: SYSTEM SET-UP Giannoccaro, N.I. * ; Oishi, K. ** & Sakamoto,
Lesson 17: Synchronous Machines
 Lesson 17: Synchronous Machines ET 332b Ac Motors, Generators and Power Systems Lesson 17_et332b.pptx 1 Learning Objectives After this presentation you will be able to: Explain how synchronous machines
Lesson 17: Synchronous Machines ET 332b Ac Motors, Generators and Power Systems Lesson 17_et332b.pptx 1 Learning Objectives After this presentation you will be able to: Explain how synchronous machines
DYNAMIC ANALYSIS OF DRIVE MECHANISM WITH FUNCTIONAL MODEL
 DYNAMIC ANALYSIS OF DRIVE MECHANISM WITH FUNCTIONAL MODEL Yasunobu Uchino Department of Mechanical Engineering, Hosei University 3-7-2 Kajinocho, Koganei-shi, TOKYO, JAPAN Tatsuhito Aihara Department of
DYNAMIC ANALYSIS OF DRIVE MECHANISM WITH FUNCTIONAL MODEL Yasunobu Uchino Department of Mechanical Engineering, Hosei University 3-7-2 Kajinocho, Koganei-shi, TOKYO, JAPAN Tatsuhito Aihara Department of
Eigenvalues and eigenvectors System Theory: electricmotor
 Eigenvalues and eigenvectors System Theory: electricmotor Alireza Abouhossein Ph.D. Alireza.abouhossein@unibo.it 1 Example-1 Can you calculate A^2, A -1 -I? without multiplying A or finding the inverse
Eigenvalues and eigenvectors System Theory: electricmotor Alireza Abouhossein Ph.D. Alireza.abouhossein@unibo.it 1 Example-1 Can you calculate A^2, A -1 -I? without multiplying A or finding the inverse
AC Induction Motor Stator Resistance Estimation Algorithm
 7th WSEAS International Conference on Electric Power Systems, High Voltages, Electric Machines, Venice, Italy, November 21-23, 27 86 AC Induction Motor Stator Resistance Estimation Algorithm PETR BLAHA
7th WSEAS International Conference on Electric Power Systems, High Voltages, Electric Machines, Venice, Italy, November 21-23, 27 86 AC Induction Motor Stator Resistance Estimation Algorithm PETR BLAHA
Research Article Calculation for Primary Combustion Characteristics of Boron-Based Fuel-Rich Propellant Based on BP Neural Network
 Combustion Volume 2012, Article ID 635190, 6 pages doi:10.1155/2012/635190 Research Article Calculation for Primary Combustion Characteristics of Boron-Based Fuel-Rich Propellant Based on BP Neural Network
Combustion Volume 2012, Article ID 635190, 6 pages doi:10.1155/2012/635190 Research Article Calculation for Primary Combustion Characteristics of Boron-Based Fuel-Rich Propellant Based on BP Neural Network
Parameter Estimation of Three Phase Squirrel Cage Induction Motor
 International Conference On Emerging Trends in Mechanical and Electrical Engineering RESEARCH ARTICLE OPEN ACCESS Parameter Estimation of Three Phase Squirrel Cage Induction Motor Sonakshi Gupta Department
International Conference On Emerging Trends in Mechanical and Electrical Engineering RESEARCH ARTICLE OPEN ACCESS Parameter Estimation of Three Phase Squirrel Cage Induction Motor Sonakshi Gupta Department
Research Article On the Security of a Novel Probabilistic Signature Based on Bilinear Square Diffie-Hellman Problem and Its Extension
 e Scientific World Journal, Article ID 345686, 4 pages http://dx.doi.org/10.1155/2014/345686 Research Article On the Security of a Novel Probabilistic Signature Based on Bilinear Square Diffie-Hellman
e Scientific World Journal, Article ID 345686, 4 pages http://dx.doi.org/10.1155/2014/345686 Research Article On the Security of a Novel Probabilistic Signature Based on Bilinear Square Diffie-Hellman
Research Article On the Dynamics of the Furuta Pendulum
 Control Science and Engineering Volume, Article ID 583, 8 pages doi:.55//583 Research Article On the Dynamics of the Furuta Pendulum Benjamin Seth Cazzolato and Zebb Prime School of Mechanical Engineering,
Control Science and Engineering Volume, Article ID 583, 8 pages doi:.55//583 Research Article On the Dynamics of the Furuta Pendulum Benjamin Seth Cazzolato and Zebb Prime School of Mechanical Engineering,
Lab 3: Model based Position Control of a Cart
 I. Objective Lab 3: Model based Position Control of a Cart The goal of this lab is to help understand the methodology to design a controller using the given plant dynamics. Specifically, we would do position
I. Objective Lab 3: Model based Position Control of a Cart The goal of this lab is to help understand the methodology to design a controller using the given plant dynamics. Specifically, we would do position
Research Article Characterization and Modelling of LeBlanc Hydrodynamic Stabilizer: A Novel Approach for Steady and Transient State Models
 Modelling and Simulation in Engineering Volume 215, Article ID 729582, 11 pages http://dx.doi.org/1.1155/215/729582 Research Article Characterization and Modelling of LeBlanc Hydrodynamic Stabilizer: A
Modelling and Simulation in Engineering Volume 215, Article ID 729582, 11 pages http://dx.doi.org/1.1155/215/729582 Research Article Characterization and Modelling of LeBlanc Hydrodynamic Stabilizer: A
PI-like Observer Structures in Digitally Controlled DC Servo Drives: Theory and Experiments
 30 ELECTRONICS, VOL. 15, NO. 1, JUNE 2011 PI-like Observer Structures in Digitally Controlled DC Servo Drives: Theory and Experiments Milica B. Naumović Abstract This paper deals with the problem of the
30 ELECTRONICS, VOL. 15, NO. 1, JUNE 2011 PI-like Observer Structures in Digitally Controlled DC Servo Drives: Theory and Experiments Milica B. Naumović Abstract This paper deals with the problem of the
2.004 Dynamics and Control II Spring 2008
 MIT OpenCourseWare http://ocw.mit.edu 2.004 Dynamics and Control II Spring 2008 For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms. Massachusetts Institute
MIT OpenCourseWare http://ocw.mit.edu 2.004 Dynamics and Control II Spring 2008 For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms. Massachusetts Institute
Application of Neuro Fuzzy Reduced Order Observer in Magnetic Bearing Systems
 Application of Neuro Fuzzy Reduced Order Observer in Magnetic Bearing Systems M. A., Eltantawie, Member, IAENG Abstract Adaptive Neuro-Fuzzy Inference System (ANFIS) is used to design fuzzy reduced order
Application of Neuro Fuzzy Reduced Order Observer in Magnetic Bearing Systems M. A., Eltantawie, Member, IAENG Abstract Adaptive Neuro-Fuzzy Inference System (ANFIS) is used to design fuzzy reduced order
(Refer Slide Time: 00:01:30 min)
") Control Engineering Prof. M. Gopal Department of Electrical Engineering Indian Institute of Technology, Delhi Lecture - 3 Introduction to Control Problem (Contd.) Well friends, I have been giving you various
Control Engineering Prof. M. Gopal Department of Electrical Engineering Indian Institute of Technology, Delhi Lecture - 3 Introduction to Control Problem (Contd.) Well friends, I have been giving you various
Research Article Dual-Domain Transform for Travelling Wave in FRFT Domain
 International Scholarly Research Network ISRN Applied Mathematics Volume 011, Article ID 161643, 8 pages doi:10.540/011/161643 Research Article Dual-Domain Transform for Travelling Wave in FRFT Domain
International Scholarly Research Network ISRN Applied Mathematics Volume 011, Article ID 161643, 8 pages doi:10.540/011/161643 Research Article Dual-Domain Transform for Travelling Wave in FRFT Domain
The Corrected Expressions for the Four-Pole Transmission Matrix for a Duct with a Linear Temperature Gradient and an Exponential Temperature Profile
 Open Journal of Acoustics, 03, 3, 6-66 http://dx.doi.org/0.436/oja.03.3300 Published Online September 03 (http://www.scirp.org/journal/oja) he Corrected Expressions for the Four-Pole ransmission Matrix
Open Journal of Acoustics, 03, 3, 6-66 http://dx.doi.org/0.436/oja.03.3300 Published Online September 03 (http://www.scirp.org/journal/oja) he Corrected Expressions for the Four-Pole ransmission Matrix
Dynamics of the synchronous machine
 ELEC0047 - Power system dynamics, control and stability Dynamics of the synchronous machine Thierry Van Cutsem t.vancutsem@ulg.ac.be www.montefiore.ulg.ac.be/~vct October 2018 1 / 38 Time constants and
ELEC0047 - Power system dynamics, control and stability Dynamics of the synchronous machine Thierry Van Cutsem t.vancutsem@ulg.ac.be www.montefiore.ulg.ac.be/~vct October 2018 1 / 38 Time constants and
International Journal of Advance Research in Computer Science and Management Studies
 Volume 2, Issue 9, September 2014 ISSN: 2321 7782 (Online) International Journal of Advance Research in Computer Science and Management Studies Research Article / Survey Paper / Case Study Available online
Volume 2, Issue 9, September 2014 ISSN: 2321 7782 (Online) International Journal of Advance Research in Computer Science and Management Studies Research Article / Survey Paper / Case Study Available online
A METHOD FOR EVALUATION OF THE CHAIN DRIVE EFFICIENCY
 Original Scientific Paper doi:10.5937/jaes13-9170 Paper number: 13(2015)4, 341, 277-282 A METHOD FOR EVALUATION OF THE CHAIN DRIVE EFFICIENCY Aleksey Egorov* Volga State University of Technology, Yoshkar-Ola,
Original Scientific Paper doi:10.5937/jaes13-9170 Paper number: 13(2015)4, 341, 277-282 A METHOD FOR EVALUATION OF THE CHAIN DRIVE EFFICIENCY Aleksey Egorov* Volga State University of Technology, Yoshkar-Ola,
UNIVERSITY OF BOLTON SCHOOL OF ENGINEERING BSC (HONS) MECHATRONICS TOP-UP SEMESTER 1 EXAMINATION 2017/2018 ADVANCED MECHATRONIC SYSTEMS
 MECHATRONICS TOP-UP SEMESTER 1 EXAMINATION 2017/2018 ADVANCED MECHATRONIC SYSTEMS") ENG08 UNIVERSITY OF BOLTON SCHOOL OF ENGINEERING BSC (HONS) MECHATRONICS TOP-UP SEMESTER EXAMINATION 07/08 ADVANCED MECHATRONIC SYSTEMS MODULE NO: MEC600 Date: 7 January 08 Time: 0.00.00 INSTRUCTIONS TO
ENG08 UNIVERSITY OF BOLTON SCHOOL OF ENGINEERING BSC (HONS) MECHATRONICS TOP-UP SEMESTER EXAMINATION 07/08 ADVANCED MECHATRONIC SYSTEMS MODULE NO: MEC600 Date: 7 January 08 Time: 0.00.00 INSTRUCTIONS TO
Positioning Servo Design Example
 Positioning Servo Design Example 1 Goal. The goal in this design example is to design a control system that will be used in a pick-and-place robot to move the link of a robot between two positions. Usually
Positioning Servo Design Example 1 Goal. The goal in this design example is to design a control system that will be used in a pick-and-place robot to move the link of a robot between two positions. Usually
JRE SCHOOL OF Engineering
 JRE SCHOOL OF Engineering Class Test-1 Examinations September 2014 Subject Name Electromechanical Energy Conversion-II Subject Code EEE -501 Roll No. of Student Max Marks 30 Marks Max Duration 1 hour Date
JRE SCHOOL OF Engineering Class Test-1 Examinations September 2014 Subject Name Electromechanical Energy Conversion-II Subject Code EEE -501 Roll No. of Student Max Marks 30 Marks Max Duration 1 hour Date
Rotary Motion Servo Plant: SRV02. Rotary Experiment #01: Modeling. SRV02 Modeling using QuaRC. Student Manual
 Rotary Motion Servo Plant: SRV02 Rotary Experiment #01: Modeling SRV02 Modeling using QuaRC Student Manual SRV02 Modeling Laboratory Student Manual Table of Contents 1. INTRODUCTION...1 2. PREREQUISITES...1
Rotary Motion Servo Plant: SRV02 Rotary Experiment #01: Modeling SRV02 Modeling using QuaRC Student Manual SRV02 Modeling Laboratory Student Manual Table of Contents 1. INTRODUCTION...1 2. PREREQUISITES...1
Online Identification And Control of A PV-Supplied DC Motor Using Universal Learning Networks
 Online Identification And Control of A PV-Supplied DC Motor Using Universal Learning Networks Ahmed Hussein * Kotaro Hirasawa ** Jinglu Hu ** * Graduate School of Information Science & Electrical Eng.,
Online Identification And Control of A PV-Supplied DC Motor Using Universal Learning Networks Ahmed Hussein * Kotaro Hirasawa ** Jinglu Hu ** * Graduate School of Information Science & Electrical Eng.,
Disturbance Rejection in Parameter-varying Web-winding Systems
 Proceedings of the 17th World Congress The International Federation of Automatic Control Disturbance Rejection in Parameter-varying Web-winding Systems Hua Zhong Lucy Y. Pao Electrical and Computer Engineering
Proceedings of the 17th World Congress The International Federation of Automatic Control Disturbance Rejection in Parameter-varying Web-winding Systems Hua Zhong Lucy Y. Pao Electrical and Computer Engineering
Mo de ling, Ide nti cat ion, and Control of a DC-Servomotor
 Mo de ling, Ide nti cat ion, and Control of a DC-Servomotor Concepts emphasized: Dynamic modeling, time-domain analysis, system identi cation, and position-plus-velocity feedback control. 1. Introduction
Mo de ling, Ide nti cat ion, and Control of a DC-Servomotor Concepts emphasized: Dynamic modeling, time-domain analysis, system identi cation, and position-plus-velocity feedback control. 1. Introduction
Mechanical Oscillations
 Mechanical Oscillations Richard Spencer, Med Webster, Roy Albridge and Jim Waters September, 1988 Revised September 6, 010 1 Reading: Shamos, Great Experiments in Physics, pp. 4-58 Harmonic Motion.1 Free
Mechanical Oscillations Richard Spencer, Med Webster, Roy Albridge and Jim Waters September, 1988 Revised September 6, 010 1 Reading: Shamos, Great Experiments in Physics, pp. 4-58 Harmonic Motion.1 Free
Research Article On Complementary Root Locus of Biproper Transfer Functions
 Mathematical Problems in Engineering Volume 9, Article ID 779, pages doi:.55/9/779 Research Article On Complementary Root Locus of Biproper Transfer Functions Marcelo C. M. Teixeira, Edvaldo Assunção,
Mathematical Problems in Engineering Volume 9, Article ID 779, pages doi:.55/9/779 Research Article On Complementary Root Locus of Biproper Transfer Functions Marcelo C. M. Teixeira, Edvaldo Assunção,
Research Article On the Charting Procedures: T 2 Chart and DD-Diagram
 Quality, Statistics, and Reliability Volume 2, Article ID 83764, 8 pages doi:.55/2/83764 Research Article On the Charting Procedures: T 2 Chart and DD-Diagram Mekki Hajlaoui Faculté des Sciences Economiques
Quality, Statistics, and Reliability Volume 2, Article ID 83764, 8 pages doi:.55/2/83764 Research Article On the Charting Procedures: T 2 Chart and DD-Diagram Mekki Hajlaoui Faculté des Sciences Economiques
MAE106 Homework 2 - Solution DC Motors & Intro to the frequency domain
 MAE06 Homework 2 - Solution DC Motors & Intro to the frequency domain University of California, Irvine Department of Mechanical and Aerospace Engineering Problem You are given the circuit shown in Figure.
MAE06 Homework 2 - Solution DC Motors & Intro to the frequency domain University of California, Irvine Department of Mechanical and Aerospace Engineering Problem You are given the circuit shown in Figure.
Appendix A Prototypes Models
 Appendix A Prototypes Models This appendix describes the model of the prototypes used in Chap. 3. These mathematical models can also be found in the Student Handout by Quanser. A.1 The QUANSER SRV-02 Setup
Appendix A Prototypes Models This appendix describes the model of the prototypes used in Chap. 3. These mathematical models can also be found in the Student Handout by Quanser. A.1 The QUANSER SRV-02 Setup
sc Control Systems Design Q.1, Sem.1, Ac. Yr. 2010/11
 sc46 - Control Systems Design Q Sem Ac Yr / Mock Exam originally given November 5 9 Notes: Please be reminded that only an A4 paper with formulas may be used during the exam no other material is to be
sc46 - Control Systems Design Q Sem Ac Yr / Mock Exam originally given November 5 9 Notes: Please be reminded that only an A4 paper with formulas may be used during the exam no other material is to be
GAIN SCHEDULING CONTROL WITH MULTI-LOOP PID FOR 2- DOF ARM ROBOT TRAJECTORY CONTROL
 GAIN SCHEDULING CONTROL WITH MULTI-LOOP PID FOR 2- DOF ARM ROBOT TRAJECTORY CONTROL 1 KHALED M. HELAL, 2 MOSTAFA R.A. ATIA, 3 MOHAMED I. ABU EL-SEBAH 1, 2 Mechanical Engineering Department ARAB ACADEMY
GAIN SCHEDULING CONTROL WITH MULTI-LOOP PID FOR 2- DOF ARM ROBOT TRAJECTORY CONTROL 1 KHALED M. HELAL, 2 MOSTAFA R.A. ATIA, 3 MOHAMED I. ABU EL-SEBAH 1, 2 Mechanical Engineering Department ARAB ACADEMY
Digitization of Vector Control Algorithm Using FPGA
 Digitization of Vector Control Algorithm Using FPGA M. P. Priyadarshini[AP] 1, K. G. Dharani[AP] 2, D. Kavitha[AP] 3 DEPARTMENT OF ECE, MVJ COLLEGE OF ENGINEERING, BANGALORE Abstract: The paper is concerned
Digitization of Vector Control Algorithm Using FPGA M. P. Priyadarshini[AP] 1, K. G. Dharani[AP] 2, D. Kavitha[AP] 3 DEPARTMENT OF ECE, MVJ COLLEGE OF ENGINEERING, BANGALORE Abstract: The paper is concerned
Analysis of Electric DC Drive Using Matlab Simulink and SimPower Systems
 Analysis of Electric DC Drive Using Matlab Simulink and SimPower Systems Miklosevic, Kresimir ; Spoljaric, Zeljko & Jerkovic, Vedrana Department of Electromechanical Engineering Faculty of Electrical Engineering,
Analysis of Electric DC Drive Using Matlab Simulink and SimPower Systems Miklosevic, Kresimir ; Spoljaric, Zeljko & Jerkovic, Vedrana Department of Electromechanical Engineering Faculty of Electrical Engineering,
Prediction of Electromagnetic Forces and Vibrations in SRMs Operating at Steady State and Transient Speeds
 Prediction of Electromagnetic Forces and Vibrations in SRMs Operating at Steady State and Transient Speeds Zhangjun Tang Stryker Instruments Kalamazoo, MI 491 Phone: 269-323-77 Ext.363 Fax: 269-323-394
Prediction of Electromagnetic Forces and Vibrations in SRMs Operating at Steady State and Transient Speeds Zhangjun Tang Stryker Instruments Kalamazoo, MI 491 Phone: 269-323-77 Ext.363 Fax: 269-323-394
Transient Vibration Prediction for Rotors on Ball Bearings Using Load-Dependent Nonlinear Bearing Stiffness
 Rotating Machinery, 10(6): 489 494, 2004 Copyright c Taylor & Francis Inc. ISSN: 1023-621X print / 1542-3034 online DOI: 10.1080/10236210490504102 Transient Vibration Prediction for Rotors on Ball Bearings
Rotating Machinery, 10(6): 489 494, 2004 Copyright c Taylor & Francis Inc. ISSN: 1023-621X print / 1542-3034 online DOI: 10.1080/10236210490504102 Transient Vibration Prediction for Rotors on Ball Bearings
6) Motors and Encoders
 Motors and Encoders") 6) Motors and Encoders Electric motors are by far the most common component to supply mechanical input to a linear motion system. Stepper motors and servo motors are the popular choices in linear motion
6) Motors and Encoders Electric motors are by far the most common component to supply mechanical input to a linear motion system. Stepper motors and servo motors are the popular choices in linear motion
Introduction to Control (034040) lecture no. 2
 lecture no. 2") Introduction to Control (034040) lecture no. 2 Leonid Mirkin Faculty of Mechanical Engineering Technion IIT Setup: Abstract control problem to begin with y P(s) u where P is a plant u is a control signal
Introduction to Control (034040) lecture no. 2 Leonid Mirkin Faculty of Mechanical Engineering Technion IIT Setup: Abstract control problem to begin with y P(s) u where P is a plant u is a control signal