信號與系統 Signals and Systems
|
|
|
- Julianna Osborne
- 5 years ago
- Views:
Transcription
 DT (Chap 5) Unbounded/Non-convergent Feng-Li Lian NTU-EE Feb13 Jun13 LT zt CT DT (Chap 9) (Chap 10) Figures and images used")
 CT-DT (Chap 7) Communication (Chap 8) Control (Chap 11) Digital Signal (dsp-8) Processing Fourier Series, Fourier Transform, Laplace")

1 Spring 2013 Flowchart Introduction (Chap 1) LTI & Convolution (Chap 2) NTUEE-SS10-Z-2 信號與系統 Signals and Systems Chapter SS-10 The z-transform FS (Chap 3) Periodic Bounded/Convergent CT DT FT Aperiodic CT (Chap 4) DT (Chap 5) Unbounded/Non-convergent Feng-Li Lian NTU-EE Feb13 Jun13 LT zt CT DT (Chap 9) (Chap 10) Figures and images used in these lecture notes are adopted from Signals & Systems by Alan V. Oppenheim and Alan S. Willsky, 1997 Time-Frequency (Chap 6) CT-DT (Chap 7) Communication (Chap 8) Control (Chap 11) Digital Signal (dsp-8) Processing Fourier Series, Fourier Transform, Laplace Transform, z-transform NTUEE-SS10-Z-3 FS FT LT/zT CT DT time frequency time frequency Outline NTUEE-SS10-Z-4 The z-transform The Region of Convergence for z-transforms The Inverse z-transform Geometric Evaluation of the Fourier Transform Properties of the z-transform Some Common z-transform Pairs Analysis & Characterization of LTI Systems Using the z-transforms System Function Algebra and Block Diagram Representations The Unilateral z-transform
2 Brief History of the z-transform NTUEE-SS10-Z-5 The z-transform was known to Laplace, and re-introduced in 1947 by W. Hurewicz as a tractable way to solve linear, constant-coefficient difference eqns. It was later dubbed "the z-transform" by Ragazzini and Zadeh in the sampled-data control group at Columbia University in 1952 The name of the z-transform The letter "z" being a sampled/digitized version of the letter "s" in Laplace transforms. Another possible source is the presence of the letter z" in the names of both Ragazzini and Zadeh who published the seminal paper. The modified or advanced z-transform was later developed and popularized by E. I. Jury in 1958, The idea contained within the z-transform is also known as the method of generating functions around 1730 when it was introduced by DeMoivre with probability theory. From a mathematical view the z-transform can also be viewed as a Laurent series where one views the sequence of numbers under consideration as the (Laurent) expansion of an analytic function (the z-transform). From the Fourier Transform From the Fourier Transform of DT signals x[n]: 1 1 FT n n NTUEE-SS10-Z-6 zt The z-transform The z-transform of a General Signal x[n]: NTUEE-SS10-Z-7 The z-transform z-transform & Fourier Transform: NTUEE-SS10-Z-8 FT zt



3 The z-transform Example 10.1: NTUEE-SS10-Z-9 Laplace Transform and The z-transform NTUEE-SS10-Z-10 The z-transform Example 10.2: NTUEE-SS10-Z-11 The z-transform Region of Convergence (ROC): NTUEE-SS10-Z-12



4 The z-transform Example 10.3: NTUEE-SS10-Z-13 The z-transform Example 10.3: NTUEE-SS10-Z-14 The z-transform Example 10.4: NTUEE-SS10-Z-15 The z-transform Example 10.4: NTUEE-SS10-Z-16


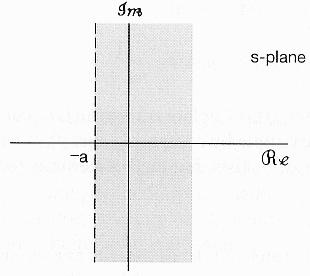
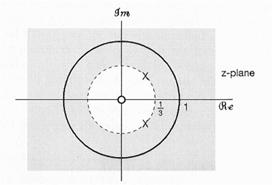
5 Outline NTUEE-SS10-Z-17 The z-transform The Region of Convergence for z-transforms The Inverse z-transform Geometric Evaluation of the Fourier Transform Properties of the z-transform Some Common z-transform Pairs Analysis & Characterization of LTI Systems Using the z-transforms System Function Algebra and Block Diagram Representations The Unilateral z-transform The Region of Convergence for z-transform Properties of ROC: 1. The ROC of X(z) consists of a ring in the z-plane centered about the origin 2. The ROC does not contain any poles NTUEE-SS10-Z-18 The Region of Convergence for z-transform Properties of ROC: NTUEE-SS10-Z-19 The Region of Convergence for z-transform Properties of ROC: NTUEE-SS10-Z If x[n] is of finite duration, then the ROC is the entire z-plane, except possibly z = 0 and/or z = 4. If x[n] is right-sided sequence, and if the circle z = r 0 is in the ROC, then all finite values of z for which z > r 0 will also be in the ROC


![If x[n] is left-sided sequence,](/docs-images/82/85448383/images/6-4.jpg "and if the circle z = r 0 is in")





6 The Region of Convergence for z-transform Properties of ROC: NTUEE-SS10-Z-21 The Region of Convergence for z-transform Properties of ROC: NTUEE-SS10-Z If x[n] is left-sided sequence, and if the circle z = r 0 is in the ROC, then all values of z for which 0 < z < r 0 will also be in the ROC 6. If x[n] is two-sided, and if the circle z = r 0 is in the ROC, then the ROC will consist of a ring in the z-plane that includes the circle z = r 0 The Region of Convergence for z-transform Example 10.7: NTUEE-SS10-Z-23 The Region of Convergence for z-transform Example 10.7: NTUEE-SS10-Z-24
 of x[n] is rational, then its ROC is bounded by poles or extends to NTUEE-SS10-Z-25 The Region of Convergence for z-transform Properties of ROC: 8.")
 of x[n] is rational NTUEE-SS10-Z-26 If x[n] is right sided")
 Furthermore, if x[n] is causal")
7 The Region of Convergence for z-transform Properties of ROC: 7. If the z-transform X(z) of x[n] is rational, then its ROC is bounded by poles or extends to NTUEE-SS10-Z-25 The Region of Convergence for z-transform Properties of ROC: 8. If the z-transform X(z) of x[n] is rational NTUEE-SS10-Z-26 If x[n] is right sided, then the ROC is the region in the z-plane outside the outermost pole --- i.e., outside the circle of radius equal to the largest magnitude of the poles of X(z) Furthermore, if x[n] is causal, then the ROC also includes z = The Region of Convergence for z-transform Properties of ROC: NTUEE-SS10-Z-27 The Region of Convergence for z-transform Example 10.8: NTUEE-SS10-Z If the z-transform X(z) of x[n] is rational and if x[n] is left sided, then the ROC is the region in the z-plane inside the innermost pole --- i.e., inside the circle of radius equal to the smallest magnitude of the poles of X(z) other than any at z = 0 and extending inward and possibly including z = 0 - In particular, if x[n] is anti-causal, (i.e., if it is left sided and = 0 for n > 0), then the ROC also includes z = 0
8 Outline NTUEE-SS10-Z-29 The z-transform The Region of Convergence for z-transforms The Inverse z-transform Geometric Evaluation of the Fourier Transform Properties of the z-transform Some Common z-transform Pairs Analysis & Characterization of LTI Systems Using the z-transforms System Function Algebra and Block Diagram Representations The Unilateral z-transform The Inverse z-transform The Inverse z-transform: By the use of contour integration NTUEE-SS10-Z-30 The Inverse z-transform The Inverse z-transform: NTUEE-SS10-Z-31 The Inverse z-transform Example 10.9: NTUEE-SS10-Z-32 By the technique of partial fraction expansion
9 The Inverse z-transform Examples 10.9, 10.10, 10.11: NTUEE-SS10-Z-33 Outline NTUEE-SS10-Z-34 The z-transform The Region of Convergence for z-transforms The Inverse z-transform Geometric Evaluation of the Fourier Transform Properties of the z-transform Some Common z-transform Pairs Analysis & Characterization of LTI Systems Using the z-transforms System Function Algebra and Block Diagram Representations The Unilateral z-transform Geometric Evaluation of the Fourier Transform First-Order Systems: NTUEE-SS10-Z-35 Geometric Evaluation of the Fourier Transform Second-Order Systems: NTUEE-SS10-Z-36

10 Laplace Transform and The z-transform CT DT NTUEE-SS10-Z-37 Outline The z-transform NTUEE-SS10-Z-38 The Region of Convergence for z-transforms The Inverse z-transform Geometric Evaluation of the Fourier Transform Properties of the z-transform Some Common z-transform Pairs Analysis & Characterization of LTI Systems Using the z-transforms System Function Algebra and Block Diagram Representations The Unilateral z-transform Outline NTUEE-SS10-Z-39 Property CTFS DTFS CTFT DTFT LT zt Linearity Time Shifting Frequency Shifting (in s, z) Conjugation Time Reversal Time & Frequency Scaling (Periodic) Convolution Multiplication Differentiation/First Difference , , , , Integration/Running Sum (Accumulation) Conjugate Symmetry for Real Signals Symmetry for Real and Even Signals Symmetry for Real and Odd Signals Even-Odd Decomposition for Real Signals Parseval s Relation for (A)Periodic Signals Initial- and Final-Value Theorems Properties of the z-transform Linearity of the z-transform: NTUEE-SS10-Z-40

11 Properties of the z-transform Time Shifting: NTUEE-SS10-Z-41 Properties of the z-transform Scaling in the z-domain: NTUEE-SS10-Z-42 Properties of the z-transform Scaling in the z-domain: NTUEE-SS10-Z-43 Properties of the z-transform Time Reversal: NTUEE-SS10-Z-44
12 Properties of the z-transform Time Expansion: NTUEE-SS10-Z-45 Properties of the z-transform Conjugation: NTUEE-SS10-Z-46 Properties of the z-transform Convolution Property: NTUEE-SS10-Z-47 Properties of the z-transform Differentiation in the z-domain: NTUEE-SS10-Z-48
13 Properties of the z-transform NTUEE-SS10-Z-49 Properties of the z-transform NTUEE-SS10-Z-50 The Initial-Value Theorem: The Final-Value Theorem: Outline NTUEE-SS10-Z-51 The z-transform The Region of Convergence for z-transforms The Inverse z-transform Geometric Evaluation of the Fourier Transform Properties of the z-transform Some Common z-transform Pairs Analysis & Characterization of LTI Systems Using the z-transforms System Function Algebra and Block Diagram Representations The Unilateral z-transform Some z-transform Pairs NTUEE-SS10-Z-52
14 Outline NTUEE-SS10-Z-53 The z-transform The Region of Convergence for z-transforms The Inverse z-transform Geometric Evaluation of the Fourier Transform Properties of the z-transform Some Common z-transform Pairs Analysis & Characterization of LTI Systems Using the z-transforms System Function Algebra and Block Diagram Representations The Unilateral z-transform Analysis & Characterization of LTI Systems Analysis & Characterization of LTI Systems: Causality Stability LTI System NTUEE-SS10-Z-54 Analysis & Characterization of LTI Systems Causality: NTUEE-SS10-Z-55 Analysis & Characterization of LTI Systems Example 10.21: NTUEE-SS10-Z-56 For a causal LTI system, h[n] = 0 for n < 0, and thus is right-sided A DT LTI system is causal if and only if the ROC of the system function H(z) is the exterior of a circle in the z-plane, including infinity A DT LTI system with a rational H(z) is causal if and only if (a) ROC is exterior of a circle outside outermost pole; and infinity must be in the ROC; and (b) order of numerator <= order of denominator

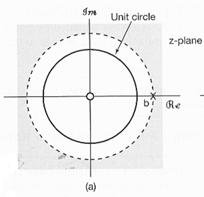
![is stable if and only if the ROC of H(z) includes the unit circle [i.e., z = 1] A causal LTI system with rational H(z) is stable if and only if all of the poles of H(z) lie in the inside the unit circle, i.](/docs-images/82/85448383/images/15-2.jpg "e., all of the poles have magnitude < 1 Analysis & Characterization of LTI Systems Example 10.")
15 Analysis & Characterization of LTI Systems Stability: NTUEE-SS10-Z-57 Analysis & Characterization of LTI Systems Example 10.22: NTUEE-SS10-Z-58 An DT LTI system is stable if and only if the ROC of H(z) includes the unit circle [i.e., z = 1] A causal LTI system with rational H(z) is stable if and only if all of the poles of H(z) lie in the inside the unit circle, i.e., all of the poles have magnitude < 1 Analysis & Characterization of LTI Systems Example 10.24: NTUEE-SS10-Z-59 NTUEE-SS10-Z-60 Analysis & Characterization of LTI Systems LTI Systems by Linear Constant-Coef Difference Equations: LTI System
16 NTUEE-SS10-Z-61 Systems Characterized by Linear Constant-Coefficient Difference Equations Analysis & Characterization of LTI Systems Example 10.25: NTUEE-SS10-Z-62 Outline NTUEE-SS10-Z-63 The z-transform The Region of Convergence for z-transforms The Inverse z-transform Geometric Evaluation of the Fourier Transform Properties of the z-transform Some Common z-transform Pairs Analysis & Characterization of LTI Systems Using the z-transforms System Function Algebra and Block Diagram Representations The Unilateral z-transform System Function Algebra & Block Diagram Representation System Function Blocks: NTUEE-SS10-Z-64
17 System Function Algebra & Block Diagram Representation Example 10.28: Consider a causal LTI system with system function NTUEE-SS10-Z-65 System Function Algebra & Block Diagram Representation Example 10.29: NTUEE-SS10-Z-66 System Function Algebra & Block Diagram Representation Example 10.29: NTUEE-SS10-Z-67 System Function Algebra & Block Diagram Representation Example 10.30: NTUEE-SS10-Z-68
18 System Function Algebra & Block Diagram Representation Example 10.30: NTUEE-SS10-Z-69 Outline NTUEE-SS10-Z-70 The z-transform The Region of Convergence for z-transforms The Inverse z-transform Geometric Evaluation of the Fourier Transform Properties of the z-transform Some Common z-transform Pairs Analysis & Characterization of LTI Systems Using the z-transforms System Function Algebra and Block Diagram Representations The Unilateral z-transform The Unilateral z-transform The Unilateral z-transform of x(t): NTUEE-SS10-Z-71 The Unilateral z-transform Time-Shifting Property NTUEE-SS10-Z-72


19 The Unilateral z-transform Example 10.33: NTUEE-SS10-Z-73 The Unilateral z-transform NTUEE-SS10-Z-74 Summary of Fourier Transform and z Transform NTUEE-SS10-Z-75 Summary of Fourier Transform and z Transform NTUEE-SS10-Z-76 definition theorem property Causality Stability ROC
20 Chapter 10: The z-transform The z-transform The ROC for z-t The Inverse z-t Geometric Evaluation of the FT Properties of the z-t Linearity Time Shifting Shifting in the z-domain Time Reversal Time Expansion Conjugation Convolution First Difference Accumulation Differentiation in the z-domain Initial-Value Theorems NTUEE-SS10-Z-77 Some Common z-t Pairs Analysis & Charac. of LTI Systems Using the z-t System Function Algebra, Block Diagram Repre. The Unilateral z-t Flowchart FS (Chap 3) Periodic Time-Frequency (Chap 6) CT-DT Introduction (Chap 7) (Chap 1) LTI & Convolution (Chap 2) Bounded/Convergent CT DT LT zt DT FT Aperiodic CT (Chap 4) DT Unbounded/Non-convergent CT (Chap 9) (Chap 10) Communication (Chap 8) Control (Chap 11) (Chap 5) NTUEE-SS10-Z-78 Digital Signal (dsp-8) Processing
信號與系統 Signals and Systems
 Spring 2011 信號與系統 Signals and Systems Chapter SS-4 The Continuous-Time Fourier Transform Feng-Li Lian NTU-EE Feb11 Jun11 Figures and images used in these lecture notes are adopted from Signals & Systems
Spring 2011 信號與系統 Signals and Systems Chapter SS-4 The Continuous-Time Fourier Transform Feng-Li Lian NTU-EE Feb11 Jun11 Figures and images used in these lecture notes are adopted from Signals & Systems
信號與系統 Signals and Systems
 Spring 2015 信號與系統 Signals and Systems Chapter SS-2 Linear Time-Invariant Systems Feng-Li Lian NTU-EE Feb15 Jun15 Figures and images used in these lecture notes are adopted from Signals & Systems by Alan
Spring 2015 信號與系統 Signals and Systems Chapter SS-2 Linear Time-Invariant Systems Feng-Li Lian NTU-EE Feb15 Jun15 Figures and images used in these lecture notes are adopted from Signals & Systems by Alan
信號與系統 Signals and Systems
 Spring 2010 信號與系統 Signals and Systems Chapter SS-2 Linear Time-Invariant Systems Feng-Li Lian NTU-EE Feb10 Jun10 Figures and images used in these lecture notes are adopted from Signals & Systems by Alan
Spring 2010 信號與系統 Signals and Systems Chapter SS-2 Linear Time-Invariant Systems Feng-Li Lian NTU-EE Feb10 Jun10 Figures and images used in these lecture notes are adopted from Signals & Systems by Alan
The Z transform (2) 1
 1") The Z transform (2) 1 Today Properties of the region of convergence (3.2) Read examples 3.7, 3.8 Announcements: ELEC 310 FINAL EXAM: April 14 2010, 14:00 pm ECS 123 Assignment 2 due tomorrow by 4:00 pm
The Z transform (2) 1 Today Properties of the region of convergence (3.2) Read examples 3.7, 3.8 Announcements: ELEC 310 FINAL EXAM: April 14 2010, 14:00 pm ECS 123 Assignment 2 due tomorrow by 4:00 pm
Signals and Systems. Spring Room 324, Geology Palace, ,
 Signals and Systems Spring 2013 Room 324, Geology Palace, 13756569051, zhukaiguang@jlu.edu.cn Chapter 10 The Z-Transform 1) Z-Transform 2) Properties of the ROC of the z-transform 3) Inverse z-transform
Signals and Systems Spring 2013 Room 324, Geology Palace, 13756569051, zhukaiguang@jlu.edu.cn Chapter 10 The Z-Transform 1) Z-Transform 2) Properties of the ROC of the z-transform 3) Inverse z-transform
The Z transform (2) Alexandra Branzan Albu ELEC 310-Spring 2009-Lecture 28 1
 Alexandra Branzan Albu ELEC 310-Spring 2009-Lecture 28 1") The Z transform (2) Alexandra Branzan Albu ELEC 310-Spring 2009-Lecture 28 1 Outline Properties of the region of convergence (10.2) The inverse Z-transform (10.3) Definition Computational techniques Alexandra
The Z transform (2) Alexandra Branzan Albu ELEC 310-Spring 2009-Lecture 28 1 Outline Properties of the region of convergence (10.2) The inverse Z-transform (10.3) Definition Computational techniques Alexandra
UNIT-II Z-TRANSFORM. This expression is also called a one sided z-transform. This non causal sequence produces positive powers of z in X (z).
.") Page no: 1 UNIT-II Z-TRANSFORM The Z-Transform The direct -transform, properties of the -transform, rational -transforms, inversion of the transform, analysis of linear time-invariant systems in the -
Page no: 1 UNIT-II Z-TRANSFORM The Z-Transform The direct -transform, properties of the -transform, rational -transforms, inversion of the transform, analysis of linear time-invariant systems in the -
EE123 Digital Signal Processing. M. Lustig, EECS UC Berkeley
 EE123 Digital Signal Processing Today Last time: DTFT - Ch 2 Today: Continue DTFT Z-Transform Ch. 3 Properties of the DTFT cont. Time-Freq Shifting/modulation: M. Lustig, EE123 UCB M. Lustig, EE123 UCB
EE123 Digital Signal Processing Today Last time: DTFT - Ch 2 Today: Continue DTFT Z-Transform Ch. 3 Properties of the DTFT cont. Time-Freq Shifting/modulation: M. Lustig, EE123 UCB M. Lustig, EE123 UCB
SIGNALS AND SYSTEMS. Unit IV. Analysis of DT signals
 SIGNALS AND SYSTEMS Unit IV Analysis of DT signals Contents: 4.1 Discrete Time Fourier Transform 4.2 Discrete Fourier Transform 4.3 Z Transform 4.4 Properties of Z Transform 4.5 Relationship between Z
SIGNALS AND SYSTEMS Unit IV Analysis of DT signals Contents: 4.1 Discrete Time Fourier Transform 4.2 Discrete Fourier Transform 4.3 Z Transform 4.4 Properties of Z Transform 4.5 Relationship between Z
ESE 531: Digital Signal Processing
 ESE 531: Digital Signal Processing Lec 6: January 30, 2018 Inverse z-transform Lecture Outline! z-transform " Tie up loose ends " Regions of convergence properties! Inverse z-transform " Inspection " Partial
ESE 531: Digital Signal Processing Lec 6: January 30, 2018 Inverse z-transform Lecture Outline! z-transform " Tie up loose ends " Regions of convergence properties! Inverse z-transform " Inspection " Partial
Signals and Systems Lecture 8: Z Transform
 Signals and Systems Lecture 8: Z Transform Farzaneh Abdollahi Department of Electrical Engineering Amirkabir University of Technology Winter 2012 Farzaneh Abdollahi Signal and Systems Lecture 8 1/29 Introduction
Signals and Systems Lecture 8: Z Transform Farzaneh Abdollahi Department of Electrical Engineering Amirkabir University of Technology Winter 2012 Farzaneh Abdollahi Signal and Systems Lecture 8 1/29 Introduction
ESE 531: Digital Signal Processing
 ESE 531: Digital Signal Processing Lec 6: January 31, 2017 Inverse z-transform Lecture Outline! z-transform " Tie up loose ends " Regions of convergence properties! Inverse z-transform " Inspection " Partial
ESE 531: Digital Signal Processing Lec 6: January 31, 2017 Inverse z-transform Lecture Outline! z-transform " Tie up loose ends " Regions of convergence properties! Inverse z-transform " Inspection " Partial
! z-transform. " Tie up loose ends. " Regions of convergence properties. ! Inverse z-transform. " Inspection. " Partial fraction
 Lecture Outline ESE 53: Digital Signal Processing Lec 6: January 3, 207 Inverse z-transform! z-transform " Tie up loose ends " gions of convergence properties! Inverse z-transform " Inspection " Partial
Lecture Outline ESE 53: Digital Signal Processing Lec 6: January 3, 207 Inverse z-transform! z-transform " Tie up loose ends " gions of convergence properties! Inverse z-transform " Inspection " Partial
The Z-Transform. Fall 2012, EE123 Digital Signal Processing. Eigen Functions of LTI System. Eigen Functions of LTI System
 The Z-Transform Fall 202, EE2 Digital Signal Processing Lecture 4 September 4, 202 Used for: Analysis of LTI systems Solving di erence equations Determining system stability Finding frequency response
The Z-Transform Fall 202, EE2 Digital Signal Processing Lecture 4 September 4, 202 Used for: Analysis of LTI systems Solving di erence equations Determining system stability Finding frequency response
Chapter Intended Learning Outcomes: (i) Understanding the relationship between transform and the Fourier transform for discrete-time signals
 Understanding the relationship between transform and the Fourier transform for discrete-time signals") z Transform Chapter Intended Learning Outcomes: (i) Understanding the relationship between transform and the Fourier transform for discrete-time signals (ii) Understanding the characteristics and properties
z Transform Chapter Intended Learning Outcomes: (i) Understanding the relationship between transform and the Fourier transform for discrete-time signals (ii) Understanding the characteristics and properties
(i) Represent discrete-time signals using transform. (ii) Understand the relationship between transform and discrete-time Fourier transform
 Represent discrete-time signals using transform. (ii) Understand the relationship between transform and discrete-time Fourier transform") z Transform Chapter Intended Learning Outcomes: (i) Represent discrete-time signals using transform (ii) Understand the relationship between transform and discrete-time Fourier transform (iii) Understand
z Transform Chapter Intended Learning Outcomes: (i) Represent discrete-time signals using transform (ii) Understand the relationship between transform and discrete-time Fourier transform (iii) Understand
Let H(z) = P(z)/Q(z) be the system function of a rational form. Let us represent both P(z) and Q(z) as polynomials of z (not z -1 )
 = P(z)/Q(z) be the system function of a rational form. Let us represent both P(z) and Q(z) as polynomials of z (not z -1 )") Review: Poles and Zeros of Fractional Form Let H() = P()/Q() be the system function of a rational form. Let us represent both P() and Q() as polynomials of (not - ) Then Poles: the roots of Q()=0 Zeros:
Review: Poles and Zeros of Fractional Form Let H() = P()/Q() be the system function of a rational form. Let us represent both P() and Q() as polynomials of (not - ) Then Poles: the roots of Q()=0 Zeros:
Need for transformation?
 Z-TRANSFORM In today s class Z-transform Unilateral Z-transform Bilateral Z-transform Region of Convergence Inverse Z-transform Power Series method Partial Fraction method Solution of difference equations
Z-TRANSFORM In today s class Z-transform Unilateral Z-transform Bilateral Z-transform Region of Convergence Inverse Z-transform Power Series method Partial Fraction method Solution of difference equations
Module 4. Related web links and videos. 1. FT and ZT
 Module 4 Laplace transforms, ROC, rational systems, Z transform, properties of LT and ZT, rational functions, system properties from ROC, inverse transforms Related web links and videos Sl no Web link
Module 4 Laplace transforms, ROC, rational systems, Z transform, properties of LT and ZT, rational functions, system properties from ROC, inverse transforms Related web links and videos Sl no Web link
The Discrete-time Fourier Transform
 The Discrete-time Fourier Transform Rui Wang, Assistant professor Dept. of Information and Communication Tongji University it Email: ruiwang@tongji.edu.cn Outline Representation of Aperiodic signals: The
The Discrete-time Fourier Transform Rui Wang, Assistant professor Dept. of Information and Communication Tongji University it Email: ruiwang@tongji.edu.cn Outline Representation of Aperiodic signals: The
06EC44-Signals and System Chapter Fourier Representation for four Signal Classes
 Chapter 5.1 Fourier Representation for four Signal Classes 5.1.1Mathematical Development of Fourier Transform If the period is stretched without limit, the periodic signal no longer remains periodic but
Chapter 5.1 Fourier Representation for four Signal Classes 5.1.1Mathematical Development of Fourier Transform If the period is stretched without limit, the periodic signal no longer remains periodic but
From Wikipedia, the free encyclopedia
 Z-transform - Wikipedia, the free encyclopedia Z-transform Page 1 of 7 From Wikipedia, the free encyclopedia In mathematics and signal processing, the Z-transform converts a discrete time domain signal,
Z-transform - Wikipedia, the free encyclopedia Z-transform Page 1 of 7 From Wikipedia, the free encyclopedia In mathematics and signal processing, the Z-transform converts a discrete time domain signal,
Lecture 2 OKAN UNIVERSITY FACULTY OF ENGINEERING AND ARCHITECTURE
 OKAN UNIVERSITY FACULTY OF ENGINEERING AND ARCHITECTURE EEE 43 DIGITAL SIGNAL PROCESSING (DSP) 2 DIFFERENCE EQUATIONS AND THE Z- TRANSFORM FALL 22 Yrd. Doç. Dr. Didem Kivanc Tureli didemk@ieee.org didem.kivanc@okan.edu.tr
OKAN UNIVERSITY FACULTY OF ENGINEERING AND ARCHITECTURE EEE 43 DIGITAL SIGNAL PROCESSING (DSP) 2 DIFFERENCE EQUATIONS AND THE Z- TRANSFORM FALL 22 Yrd. Doç. Dr. Didem Kivanc Tureli didemk@ieee.org didem.kivanc@okan.edu.tr
Module 4 : Laplace and Z Transform Problem Set 4
 Module 4 : Laplace and Z Transform Problem Set 4 Problem 1 The input x(t) and output y(t) of a causal LTI system are related to the block diagram representation shown in the figure. (a) Determine a differential
Module 4 : Laplace and Z Transform Problem Set 4 Problem 1 The input x(t) and output y(t) of a causal LTI system are related to the block diagram representation shown in the figure. (a) Determine a differential
Review of Discrete-Time System
 Review of Discrete-Time System Electrical & Computer Engineering University of Maryland, College Park Acknowledgment: ENEE630 slides were based on class notes developed by Profs. K.J. Ray Liu and Min Wu.
Review of Discrete-Time System Electrical & Computer Engineering University of Maryland, College Park Acknowledgment: ENEE630 slides were based on class notes developed by Profs. K.J. Ray Liu and Min Wu.
QUESTION BANK SIGNALS AND SYSTEMS (4 th SEM ECE)
") QUESTION BANK SIGNALS AND SYSTEMS (4 th SEM ECE) 1. For the signal shown in Fig. 1, find x(2t + 3). i. Fig. 1 2. What is the classification of the systems? 3. What are the Dirichlet s conditions of Fourier
QUESTION BANK SIGNALS AND SYSTEMS (4 th SEM ECE) 1. For the signal shown in Fig. 1, find x(2t + 3). i. Fig. 1 2. What is the classification of the systems? 3. What are the Dirichlet s conditions of Fourier
Material presented here is from the course 6.003, Signals & Systems offered by MIT faculty member, Prof. Alan Willsky, Copyright c 2003.
 EE-295 Image Processing, Spring 2008 Lecture 1 Material presented here is from the course 6.003, Signals & Systems offered by MIT faculty member, Prof. Alan Willsky, Copyright c 2003. This material is
EE-295 Image Processing, Spring 2008 Lecture 1 Material presented here is from the course 6.003, Signals & Systems offered by MIT faculty member, Prof. Alan Willsky, Copyright c 2003. This material is
Solution 7 August 2015 ECE301 Signals and Systems: Final Exam. Cover Sheet
 Solution 7 August 2015 ECE301 Signals and Systems: Final Exam Cover Sheet Test Duration: 120 minutes Coverage: Chap. 1, 2, 3, 4, 5, 7 One 8.5" x 11" crib sheet is allowed. Calculators, textbooks, notes
Solution 7 August 2015 ECE301 Signals and Systems: Final Exam Cover Sheet Test Duration: 120 minutes Coverage: Chap. 1, 2, 3, 4, 5, 7 One 8.5" x 11" crib sheet is allowed. Calculators, textbooks, notes
Signals and Systems Spring 2004 Lecture #9
 Signals and Systems Spring 2004 Lecture #9 (3/4/04). The convolution Property of the CTFT 2. Frequency Response and LTI Systems Revisited 3. Multiplication Property and Parseval s Relation 4. The DT Fourier
Signals and Systems Spring 2004 Lecture #9 (3/4/04). The convolution Property of the CTFT 2. Frequency Response and LTI Systems Revisited 3. Multiplication Property and Parseval s Relation 4. The DT Fourier
Z-Transform. The Z-transform is the Discrete-Time counterpart of the Laplace Transform. Laplace : G(s) = g(t)e st dt. Z : G(z) =
 = g(t)e st dt. Z : G(z) =") Z-Transform The Z-transform is the Discrete-Time counterpart of the Laplace Transform. Laplace : G(s) = Z : G(z) = It is Used in Digital Signal Processing n= g(t)e st dt g[n]z n Used to Define Frequency
Z-Transform The Z-transform is the Discrete-Time counterpart of the Laplace Transform. Laplace : G(s) = Z : G(z) = It is Used in Digital Signal Processing n= g(t)e st dt g[n]z n Used to Define Frequency
ECE-S Introduction to Digital Signal Processing Lecture 4 Part A The Z-Transform and LTI Systems
 ECE-S352-70 Introduction to Digital Signal Processing Lecture 4 Part A The Z-Transform and LTI Systems Transform techniques are an important tool in the analysis of signals and linear time invariant (LTI)
ECE-S352-70 Introduction to Digital Signal Processing Lecture 4 Part A The Z-Transform and LTI Systems Transform techniques are an important tool in the analysis of signals and linear time invariant (LTI)
ENT 315 Medical Signal Processing CHAPTER 2 DISCRETE FOURIER TRANSFORM. Dr. Lim Chee Chin
 ENT 315 Medical Signal Processing CHAPTER 2 DISCRETE FOURIER TRANSFORM Dr. Lim Chee Chin Outline Introduction Discrete Fourier Series Properties of Discrete Fourier Series Time domain aliasing due to frequency
ENT 315 Medical Signal Processing CHAPTER 2 DISCRETE FOURIER TRANSFORM Dr. Lim Chee Chin Outline Introduction Discrete Fourier Series Properties of Discrete Fourier Series Time domain aliasing due to frequency
How to manipulate Frequencies in Discrete-time Domain? Two Main Approaches
 How to manipulate Frequencies in Discrete-time Domain? Two Main Approaches Difference Equations (an LTI system) x[n]: input, y[n]: output That is, building a system that maes use of the current and previous
How to manipulate Frequencies in Discrete-time Domain? Two Main Approaches Difference Equations (an LTI system) x[n]: input, y[n]: output That is, building a system that maes use of the current and previous
Generalizing the DTFT!
 The Transform Generaliing the DTFT! The forward DTFT is defined by X e jω ( ) = x n e jωn in which n= Ω is discrete-time radian frequency, a real variable. The quantity e jωn is then a complex sinusoid
The Transform Generaliing the DTFT! The forward DTFT is defined by X e jω ( ) = x n e jωn in which n= Ω is discrete-time radian frequency, a real variable. The quantity e jωn is then a complex sinusoid
Continuous-Time Fourier Transform
 Signals and Systems Continuous-Time Fourier Transform Chang-Su Kim continuous time discrete time periodic (series) CTFS DTFS aperiodic (transform) CTFT DTFT Lowpass Filtering Blurring or Smoothing Original
Signals and Systems Continuous-Time Fourier Transform Chang-Su Kim continuous time discrete time periodic (series) CTFS DTFS aperiodic (transform) CTFT DTFT Lowpass Filtering Blurring or Smoothing Original
Question Paper Code : AEC11T02
 Hall Ticket No Question Paper Code : AEC11T02 VARDHAMAN COLLEGE OF ENGINEERING (AUTONOMOUS) Affiliated to JNTUH, Hyderabad Four Year B. Tech III Semester Tutorial Question Bank 2013-14 (Regulations: VCE-R11)
Hall Ticket No Question Paper Code : AEC11T02 VARDHAMAN COLLEGE OF ENGINEERING (AUTONOMOUS) Affiliated to JNTUH, Hyderabad Four Year B. Tech III Semester Tutorial Question Bank 2013-14 (Regulations: VCE-R11)
Discrete-Time Signals and Systems. The z-transform and Its Application. The Direct z-transform. Region of Convergence. Reference: Sections
 Discrete-Time Signals and Systems The z-transform and Its Application Dr. Deepa Kundur University of Toronto Reference: Sections 3. - 3.4 of John G. Proakis and Dimitris G. Manolakis, Digital Signal Processing:
Discrete-Time Signals and Systems The z-transform and Its Application Dr. Deepa Kundur University of Toronto Reference: Sections 3. - 3.4 of John G. Proakis and Dimitris G. Manolakis, Digital Signal Processing:
ELEG 305: Digital Signal Processing
 ELEG 305: Digital Signal Processing Lecture 4: Inverse z Transforms & z Domain Analysis Kenneth E. Barner Department of Electrical and Computer Engineering University of Delaware Fall 008 K. E. Barner
ELEG 305: Digital Signal Processing Lecture 4: Inverse z Transforms & z Domain Analysis Kenneth E. Barner Department of Electrical and Computer Engineering University of Delaware Fall 008 K. E. Barner
GATE EE Topic wise Questions SIGNALS & SYSTEMS
 www.gatehelp.com GATE EE Topic wise Questions YEAR 010 ONE MARK Question. 1 For the system /( s + 1), the approximate time taken for a step response to reach 98% of the final value is (A) 1 s (B) s (C)
www.gatehelp.com GATE EE Topic wise Questions YEAR 010 ONE MARK Question. 1 For the system /( s + 1), the approximate time taken for a step response to reach 98% of the final value is (A) 1 s (B) s (C)
Digital Signal Processing:
 Digital Signal Processing: Mathematical and algorithmic manipulation of discretized and quantized or naturally digital signals in order to extract the most relevant and pertinent information that is carried
Digital Signal Processing: Mathematical and algorithmic manipulation of discretized and quantized or naturally digital signals in order to extract the most relevant and pertinent information that is carried
EE 224 Signals and Systems I Review 1/10
 EE 224 Signals and Systems I Review 1/10 Class Contents Signals and Systems Continuous-Time and Discrete-Time Time-Domain and Frequency Domain (all these dimensions are tightly coupled) SIGNALS SYSTEMS
EE 224 Signals and Systems I Review 1/10 Class Contents Signals and Systems Continuous-Time and Discrete-Time Time-Domain and Frequency Domain (all these dimensions are tightly coupled) SIGNALS SYSTEMS
Modeling and Analysis of Systems Lecture #8 - Transfer Function. Guillaume Drion Academic year
 Modeling and Analysis of Systems Lecture #8 - Transfer Function Guillaume Drion Academic year 2015-2016 1 Input-output representation of LTI systems Can we mathematically describe a LTI system using the
Modeling and Analysis of Systems Lecture #8 - Transfer Function Guillaume Drion Academic year 2015-2016 1 Input-output representation of LTI systems Can we mathematically describe a LTI system using the
Z Transform (Part - II)
") Z Transform (Part - II). The Z Transform of the following real exponential sequence x(nt) = a n, nt 0 = 0, nt < 0, a > 0 (a) ; z > (c) for all z z (b) ; z (d) ; z < a > a az az Soln. The given sequence
Z Transform (Part - II). The Z Transform of the following real exponential sequence x(nt) = a n, nt 0 = 0, nt < 0, a > 0 (a) ; z > (c) for all z z (b) ; z (d) ; z < a > a az az Soln. The given sequence
The Continuous-time Fourier
 The Continuous-time Fourier Transform Rui Wang, Assistant professor Dept. of Information and Communication Tongji University it Email: ruiwang@tongji.edu.cn Outline Representation of Aperiodic signals:
The Continuous-time Fourier Transform Rui Wang, Assistant professor Dept. of Information and Communication Tongji University it Email: ruiwang@tongji.edu.cn Outline Representation of Aperiodic signals:
DSP-I DSP-I DSP-I DSP-I
 DSP-I DSP-I DSP-I DSP-I Digital Signal Processing I (8-79) Fall Semester, 005 OTES FOR 8-79 LECTURE 9: PROPERTIES AD EXAPLES OF Z-TRASFORS Distributed: September 7, 005 otes: This handout contains in outline
DSP-I DSP-I DSP-I DSP-I Digital Signal Processing I (8-79) Fall Semester, 005 OTES FOR 8-79 LECTURE 9: PROPERTIES AD EXAPLES OF Z-TRASFORS Distributed: September 7, 005 otes: This handout contains in outline
Notes 22 largely plagiarized by %khc
 Notes 22 largely plagiarized by %khc LTv. ZT Using the conformal map z e st, we can transfer our knowledge of the ROC of the bilateral laplace transform to the ROC of the bilateral z transform. Laplace
Notes 22 largely plagiarized by %khc LTv. ZT Using the conformal map z e st, we can transfer our knowledge of the ROC of the bilateral laplace transform to the ROC of the bilateral z transform. Laplace
X (z) = n= 1. Ã! X (z) x [n] X (z) = Z fx [n]g x [n] = Z 1 fx (z)g. r n x [n] ª e jnω
![X (z) = n= 1. Ã! X (z) x [n] X (z) = Z fx [n]g x [n] = Z 1 fx (z)g. r n x [n] ª e jnω](/thumbs/82/85448077.jpg "X (z) = n= 1. Ã! X (z) x [n] X (z) = Z fx [n]g x [n] = Z 1 fx (z)g. r n x [n] ª e jnω") 3 The z-transform ² Two advantages with the z-transform:. The z-transform is a generalization of the Fourier transform for discrete-time signals; which encompasses a broader class of sequences. The z-transform
3 The z-transform ² Two advantages with the z-transform:. The z-transform is a generalization of the Fourier transform for discrete-time signals; which encompasses a broader class of sequences. The z-transform
Fourier Analysis Overview (0B)
") CTFS: Continuous Time Fourier Series CTFT: Continuous Time Fourier Transform DTFS: Fourier Series DTFT: Fourier Transform DFT: Discrete Fourier Transform Copyright (c) 2009-2016 Young W. Lim. Permission
CTFS: Continuous Time Fourier Series CTFT: Continuous Time Fourier Transform DTFS: Fourier Series DTFT: Fourier Transform DFT: Discrete Fourier Transform Copyright (c) 2009-2016 Young W. Lim. Permission
Advanced Training Course on FPGA Design and VHDL for Hardware Simulation and Synthesis
 065-3 Advanced Training Course on FPGA Design and VHDL for Hardware Simulation and Synthesis 6 October - 0 November, 009 Digital Signal Processing The z-transform Massimiliano Nolich DEEI Facolta' di Ingegneria
065-3 Advanced Training Course on FPGA Design and VHDL for Hardware Simulation and Synthesis 6 October - 0 November, 009 Digital Signal Processing The z-transform Massimiliano Nolich DEEI Facolta' di Ingegneria
Z-Transform. 清大電機系林嘉文 Original PowerPoint slides prepared by S. K. Mitra 4-1-1
 Chapter 6 Z-Transform 清大電機系林嘉文 cwlin@ee.nthu.edu.tw 03-5731152 Original PowerPoint slides prepared by S. K. Mitra 4-1-1 z-transform The DTFT provides a frequency-domain representation of discrete-time
Chapter 6 Z-Transform 清大電機系林嘉文 cwlin@ee.nthu.edu.tw 03-5731152 Original PowerPoint slides prepared by S. K. Mitra 4-1-1 z-transform The DTFT provides a frequency-domain representation of discrete-time
Determine the Z transform (including the region of convergence) for each of the following signals:
 for each of the following signals:") 6.003 Homework 4 Please do the following problems by Wednesday, March 3, 00. your answers: they will NOT be graded. Solutions will be posted. Problems. Z transforms You need not submit Determine the Z
6.003 Homework 4 Please do the following problems by Wednesday, March 3, 00. your answers: they will NOT be graded. Solutions will be posted. Problems. Z transforms You need not submit Determine the Z
Continuous and Discrete Time Signals and Systems
 Continuous and Discrete Time Signals and Systems Mrinal Mandal University of Alberta, Edmonton, Canada and Amir Asif York University, Toronto, Canada CAMBRIDGE UNIVERSITY PRESS Contents Preface Parti Introduction
Continuous and Discrete Time Signals and Systems Mrinal Mandal University of Alberta, Edmonton, Canada and Amir Asif York University, Toronto, Canada CAMBRIDGE UNIVERSITY PRESS Contents Preface Parti Introduction
The Z-transform, like many other integral transforms, can be defined as either a onesided or two-sided transform.
 Z-transform Definition The Z-transform, like many other integral transforms, can be defined as either a onesided or two-sided transform. Bilateral Z-transform The bilateral or two-sided Z-transform of
Z-transform Definition The Z-transform, like many other integral transforms, can be defined as either a onesided or two-sided transform. Bilateral Z-transform The bilateral or two-sided Z-transform of
CH.6 Laplace Transform
 CH.6 Laplace Transform Where does the Laplace transform come from? How to solve this mistery that where the Laplace transform come from? The starting point is thinking about power series. The power series
CH.6 Laplace Transform Where does the Laplace transform come from? How to solve this mistery that where the Laplace transform come from? The starting point is thinking about power series. The power series
Digital Signal Processing
 COMP ENG 4TL4: Digital Signal Processing Notes for Lecture #21 Friday, October 24, 2003 Types of causal FIR (generalized) linear-phase filters: Type I: Symmetric impulse response: with order M an even
COMP ENG 4TL4: Digital Signal Processing Notes for Lecture #21 Friday, October 24, 2003 Types of causal FIR (generalized) linear-phase filters: Type I: Symmetric impulse response: with order M an even
ECE503: Digital Signal Processing Lecture 4
 ECE503: Digital Signal Processing Lecture 4 D. Richard Brown III WPI 06-February-2012 WPI D. Richard Brown III 06-February-2012 1 / 29 Lecture 4 Topics 1. Motivation for the z-transform. 2. Definition
ECE503: Digital Signal Processing Lecture 4 D. Richard Brown III WPI 06-February-2012 WPI D. Richard Brown III 06-February-2012 1 / 29 Lecture 4 Topics 1. Motivation for the z-transform. 2. Definition
University Question Paper Solution
 Unit 1: Introduction University Question Paper Solution 1. Determine whether the following systems are: i) Memoryless, ii) Stable iii) Causal iv) Linear and v) Time-invariant. i) y(n)= nx(n) ii) y(t)=
Unit 1: Introduction University Question Paper Solution 1. Determine whether the following systems are: i) Memoryless, ii) Stable iii) Causal iv) Linear and v) Time-invariant. i) y(n)= nx(n) ii) y(t)=
2.161 Signal Processing: Continuous and Discrete Fall 2008
 MIT OpenCourseWare http://ocw.mit.edu 2.161 Signal Processing: Continuous and Discrete Fall 2008 For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms. Massachusetts
MIT OpenCourseWare http://ocw.mit.edu 2.161 Signal Processing: Continuous and Discrete Fall 2008 For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms. Massachusetts
y[n] = = h[k]x[n k] h[k]z n k k= 0 h[k]z k ) = H(z)z n h[k]z h (7.1)
![y[n] = = h[k]x[n k] h[k]z n k k= 0 h[k]z k ) = H(z)z n h[k]z h (7.1)](/thumbs/71/66089461.jpg "y[n] = = h[k]x[n k] h[k]z n k k= 0 h[k]z k ) = H(z)z n h[k]z h (7.1)") 7. The Z-transform 7. Definition of the Z-transform We saw earlier that complex exponential of the from {e jwn } is an eigen function of for a LTI System. We can generalize this for signals of the form
7. The Z-transform 7. Definition of the Z-transform We saw earlier that complex exponential of the from {e jwn } is an eigen function of for a LTI System. We can generalize this for signals of the form
Signals and Systems
 204181 Signals and Systems Examination Scheme: Teaching Scheme: Theory Online : 50 Marks Lectures: 4 Hrs/ Week Theory Paper : 50 Marks Tutorial : 1 Hr/Week Term work: 25 Course Objectives and Outcomes:
204181 Signals and Systems Examination Scheme: Teaching Scheme: Theory Online : 50 Marks Lectures: 4 Hrs/ Week Theory Paper : 50 Marks Tutorial : 1 Hr/Week Term work: 25 Course Objectives and Outcomes:
Chapter 13 Z Transform
 Chapter 13 Z Transform 1. -transform 2. Inverse -transform 3. Properties of -transform 4. Solution to Difference Equation 5. Calculating output using -transform 6. DTFT and -transform 7. Stability Analysis
Chapter 13 Z Transform 1. -transform 2. Inverse -transform 3. Properties of -transform 4. Solution to Difference Equation 5. Calculating output using -transform 6. DTFT and -transform 7. Stability Analysis
DIGITAL SIGNAL PROCESSING. Chapter 3 z-transform
 DIGITAL SIGNAL PROCESSING Chapter 3 z-transform by Dr. Norizam Sulaiman Faculty of Electrical & Electronics Engineering norizam@ump.edu.my OER Digital Signal Processing by Dr. Norizam Sulaiman work is
DIGITAL SIGNAL PROCESSING Chapter 3 z-transform by Dr. Norizam Sulaiman Faculty of Electrical & Electronics Engineering norizam@ump.edu.my OER Digital Signal Processing by Dr. Norizam Sulaiman work is
UNIVERSITI MALAYSIA PERLIS
 UNIVERSITI MALAYSIA PERLIS SCHOOL OF COMPUTER & COMMUNICATIONS ENGINEERING EKT 230 SIGNALS AND SYSTEMS LABORATORY MODULE LAB 5 : LAPLACE TRANSFORM & Z-TRANSFORM 1 LABORATORY OUTCOME Ability to describe
UNIVERSITI MALAYSIA PERLIS SCHOOL OF COMPUTER & COMMUNICATIONS ENGINEERING EKT 230 SIGNALS AND SYSTEMS LABORATORY MODULE LAB 5 : LAPLACE TRANSFORM & Z-TRANSFORM 1 LABORATORY OUTCOME Ability to describe
Use: Analysis of systems, simple convolution, shorthand for e jw, stability. Motivation easier to write. Or X(z) = Z {x(n)}
 = Z {x(n)}") 1 VI. Z Transform Ch 24 Use: Analysis of systems, simple convolution, shorthand for e jw, stability. A. Definition: X(z) = x(n) z z - transforms Motivation easier to write Or Note if X(z) = Z {x(n)} z
1 VI. Z Transform Ch 24 Use: Analysis of systems, simple convolution, shorthand for e jw, stability. A. Definition: X(z) = x(n) z z - transforms Motivation easier to write Or Note if X(z) = Z {x(n)} z
Responses of Digital Filters Chapter Intended Learning Outcomes:
 Responses of Digital Filters Chapter Intended Learning Outcomes: (i) Understanding the relationships between impulse response, frequency response, difference equation and transfer function in characterizing
Responses of Digital Filters Chapter Intended Learning Outcomes: (i) Understanding the relationships between impulse response, frequency response, difference equation and transfer function in characterizing
A system that is both linear and time-invariant is called linear time-invariant (LTI).
.") The Cooper Union Department of Electrical Engineering ECE111 Signal Processing & Systems Analysis Lecture Notes: Time, Frequency & Transform Domains February 28, 2012 Signals & Systems Signals are mapped
The Cooper Union Department of Electrical Engineering ECE111 Signal Processing & Systems Analysis Lecture Notes: Time, Frequency & Transform Domains February 28, 2012 Signals & Systems Signals are mapped
EE482: Digital Signal Processing Applications
 Professor Brendan Morris, SEB 3216, brendan.morris@unlv.edu EE482: Digital Signal Processing Applications Spring 2014 TTh 14:30-15:45 CBC C222 Lecture 02 DSP Fundamentals 14/01/21 http://www.ee.unlv.edu/~b1morris/ee482/
Professor Brendan Morris, SEB 3216, brendan.morris@unlv.edu EE482: Digital Signal Processing Applications Spring 2014 TTh 14:30-15:45 CBC C222 Lecture 02 DSP Fundamentals 14/01/21 http://www.ee.unlv.edu/~b1morris/ee482/
EC6303 SIGNALS AND SYSTEMS
 EC 6303-SIGNALS & SYSTEMS UNIT I CLASSIFICATION OF SIGNALS AND SYSTEMS 1. Define Signal. Signal is a physical quantity that varies with respect to time, space or a n y other independent variable.(or) It
EC 6303-SIGNALS & SYSTEMS UNIT I CLASSIFICATION OF SIGNALS AND SYSTEMS 1. Define Signal. Signal is a physical quantity that varies with respect to time, space or a n y other independent variable.(or) It
Lecture 04: Discrete Frequency Domain Analysis (z-transform)
") Lecture 04: Discrete Frequency Domain Analysis (z-transform) John Chiverton School of Information Technology Mae Fah Luang University 1st Semester 2009/ 2552 Outline Overview Lecture Contents Introduction
Lecture 04: Discrete Frequency Domain Analysis (z-transform) John Chiverton School of Information Technology Mae Fah Luang University 1st Semester 2009/ 2552 Outline Overview Lecture Contents Introduction
EECE 301 Signals & Systems Prof. Mark Fowler
 EECE 3 Signals & Systems Prof. Mark Fowler Note Set #9 C-T Systems: Laplace Transform Transfer Function Reading Assignment: Section 6.5 of Kamen and Heck /7 Course Flow Diagram The arrows here show conceptual
EECE 3 Signals & Systems Prof. Mark Fowler Note Set #9 C-T Systems: Laplace Transform Transfer Function Reading Assignment: Section 6.5 of Kamen and Heck /7 Course Flow Diagram The arrows here show conceptual
EE Homework 5 - Solutions
 EE054 - Homework 5 - Solutions 1. We know the general result that the -transform of α n 1 u[n] is with 1 α 1 ROC α < < and the -transform of α n 1 u[ n 1] is 1 α 1 with ROC 0 < α. Using this result, the
EE054 - Homework 5 - Solutions 1. We know the general result that the -transform of α n 1 u[n] is with 1 α 1 ROC α < < and the -transform of α n 1 u[ n 1] is 1 α 1 with ROC 0 < α. Using this result, the
06EC44-Signals and System Chapter EC44 Signals and Systems (Chapter 4 )
") 06EC44 Signals and Systems (Chapter 4 ) Aurthored By: Prof. krupa Rasane Asst.Prof E&C Dept. KLE Society s College of Engineering and Technology Belgaum CONTENT Fourier Series Representation 1.1.1 Introduction
06EC44 Signals and Systems (Chapter 4 ) Aurthored By: Prof. krupa Rasane Asst.Prof E&C Dept. KLE Society s College of Engineering and Technology Belgaum CONTENT Fourier Series Representation 1.1.1 Introduction
EC1305-SIGNALS AND SYSTEMS UNIT-1 CLASSIFICATION OF SIGNALS AND SYSTEMS
 EC1305-SIGNALS AND SYSTEMS UNIT-1 CLASSIFICATION OF SIGNALS AND SYSTEMS 1. Define Signal? Signal is a physical quantity that varies with respect to time, space or any other independent variable. ( Or)
EC1305-SIGNALS AND SYSTEMS UNIT-1 CLASSIFICATION OF SIGNALS AND SYSTEMS 1. Define Signal? Signal is a physical quantity that varies with respect to time, space or any other independent variable. ( Or)
Flash File. Module 3 : Sampling and Reconstruction Lecture 28 : Discrete time Fourier transform and its Properties. Objectives: Scope of this Lecture:
 Module 3 : Sampling and Reconstruction Lecture 28 : Discrete time Fourier transform and its Properties Objectives: Scope of this Lecture: In the previous lecture we defined digital signal processing and
Module 3 : Sampling and Reconstruction Lecture 28 : Discrete time Fourier transform and its Properties Objectives: Scope of this Lecture: In the previous lecture we defined digital signal processing and
EEL3135: Homework #4
 EEL335: Homework #4 Problem : For each of the systems below, determine whether or not the system is () linear, () time-invariant, and (3) causal: (a) (b) (c) xn [ ] cos( 04πn) (d) xn [ ] xn [ ] xn [ 5]
EEL335: Homework #4 Problem : For each of the systems below, determine whether or not the system is () linear, () time-invariant, and (3) causal: (a) (b) (c) xn [ ] cos( 04πn) (d) xn [ ] xn [ ] xn [ 5]
Fourier Analysis Overview (0A)
") CTFS: Fourier Series CTFT: Fourier Transform DTFS: Fourier Series DTFT: Fourier Transform DFT: Discrete Fourier Transform Copyright (c) 2011-2016 Young W. Lim. Permission is granted to copy, distribute
CTFS: Fourier Series CTFT: Fourier Transform DTFS: Fourier Series DTFT: Fourier Transform DFT: Discrete Fourier Transform Copyright (c) 2011-2016 Young W. Lim. Permission is granted to copy, distribute
The Laplace Transform
 The Laplace Transform Introduction There are two common approaches to the developing and understanding the Laplace transform It can be viewed as a generalization of the CTFT to include some signals with
The Laplace Transform Introduction There are two common approaches to the developing and understanding the Laplace transform It can be viewed as a generalization of the CTFT to include some signals with
Very useful for designing and analyzing signal processing systems
 z-transform z-transform The z-transform generalizes the Discrete-Time Fourier Transform (DTFT) for analyzing infinite-length signals and systems Very useful for designing and analyzing signal processing
z-transform z-transform The z-transform generalizes the Discrete-Time Fourier Transform (DTFT) for analyzing infinite-length signals and systems Very useful for designing and analyzing signal processing
Lecture 8 - IIR Filters (II)
") Lecture 8 - IIR Filters (II) James Barnes (James.Barnes@colostate.edu) Spring 2009 Colorado State University Dept of Electrical and Computer Engineering ECE423 1 / 27 Lecture 8 Outline Introduction Digital
Lecture 8 - IIR Filters (II) James Barnes (James.Barnes@colostate.edu) Spring 2009 Colorado State University Dept of Electrical and Computer Engineering ECE423 1 / 27 Lecture 8 Outline Introduction Digital
Chapter 6: The Laplace Transform. Chih-Wei Liu
 Chapter 6: The Laplace Transform Chih-Wei Liu Outline Introduction The Laplace Transform The Unilateral Laplace Transform Properties of the Unilateral Laplace Transform Inversion of the Unilateral Laplace
Chapter 6: The Laplace Transform Chih-Wei Liu Outline Introduction The Laplace Transform The Unilateral Laplace Transform Properties of the Unilateral Laplace Transform Inversion of the Unilateral Laplace
Topic 3: Fourier Series (FS)
") ELEC264: Signals And Systems Topic 3: Fourier Series (FS) o o o o Introduction to frequency analysis of signals CT FS Fourier series of CT periodic signals Signal Symmetry and CT Fourier Series Properties
ELEC264: Signals And Systems Topic 3: Fourier Series (FS) o o o o Introduction to frequency analysis of signals CT FS Fourier series of CT periodic signals Signal Symmetry and CT Fourier Series Properties
Transform Representation of Signals
 C H A P T E R 3 Transform Representation of Signals and LTI Systems As you have seen in your prior studies of signals and systems, and as emphasized in the review in Chapter 2, transforms play a central
C H A P T E R 3 Transform Representation of Signals and LTI Systems As you have seen in your prior studies of signals and systems, and as emphasized in the review in Chapter 2, transforms play a central
Discrete-Time Fourier Transform (DTFT)
") Discrete-Time Fourier Transform (DTFT) 1 Preliminaries Definition: The Discrete-Time Fourier Transform (DTFT) of a signal x[n] is defined to be X(e jω ) x[n]e jωn. (1) In other words, the DTFT of x[n]
Discrete-Time Fourier Transform (DTFT) 1 Preliminaries Definition: The Discrete-Time Fourier Transform (DTFT) of a signal x[n] is defined to be X(e jω ) x[n]e jωn. (1) In other words, the DTFT of x[n]
EC Signals and Systems
 UNIT I CLASSIFICATION OF SIGNALS AND SYSTEMS Continuous time signals (CT signals), discrete time signals (DT signals) Step, Ramp, Pulse, Impulse, Exponential 1. Define Unit Impulse Signal [M/J 1], [M/J
UNIT I CLASSIFICATION OF SIGNALS AND SYSTEMS Continuous time signals (CT signals), discrete time signals (DT signals) Step, Ramp, Pulse, Impulse, Exponential 1. Define Unit Impulse Signal [M/J 1], [M/J
LECTURE NOTES DIGITAL SIGNAL PROCESSING III B.TECH II SEMESTER (JNTUK R 13)
") LECTURE NOTES ON DIGITAL SIGNAL PROCESSING III B.TECH II SEMESTER (JNTUK R 13) FACULTY : B.V.S.RENUKA DEVI (Asst.Prof) / Dr. K. SRINIVASA RAO (Assoc. Prof) DEPARTMENT OF ELECTRONICS AND COMMUNICATIONS
LECTURE NOTES ON DIGITAL SIGNAL PROCESSING III B.TECH II SEMESTER (JNTUK R 13) FACULTY : B.V.S.RENUKA DEVI (Asst.Prof) / Dr. K. SRINIVASA RAO (Assoc. Prof) DEPARTMENT OF ELECTRONICS AND COMMUNICATIONS
Chapter 7: The z-transform
 Chapter 7: The -Transform ECE352 1 The -Transform - definition Continuous-time systems: e st H(s) y(t) = e st H(s) e st is an eigenfunction of the LTI system h(t), and H(s) is the corresponding eigenvalue.
Chapter 7: The -Transform ECE352 1 The -Transform - definition Continuous-time systems: e st H(s) y(t) = e st H(s) e st is an eigenfunction of the LTI system h(t), and H(s) is the corresponding eigenvalue.
z-transform Chapter 6
 z-transform Chapter 6 Dr. Iyad djafar Outline 2 Definition Relation Between z-transform and DTFT Region of Convergence Common z-transform Pairs The Rational z-transform The Inverse z-transform z-transform
z-transform Chapter 6 Dr. Iyad djafar Outline 2 Definition Relation Between z-transform and DTFT Region of Convergence Common z-transform Pairs The Rational z-transform The Inverse z-transform z-transform
Solution 10 July 2015 ECE301 Signals and Systems: Midterm. Cover Sheet
 Solution 10 July 2015 ECE301 Signals and Systems: Midterm Cover Sheet Test Duration: 60 minutes Coverage: Chap. 1,2,3,4 One 8.5" x 11" crib sheet is allowed. Calculators, textbooks, notes are not allowed.
Solution 10 July 2015 ECE301 Signals and Systems: Midterm Cover Sheet Test Duration: 60 minutes Coverage: Chap. 1,2,3,4 One 8.5" x 11" crib sheet is allowed. Calculators, textbooks, notes are not allowed.
 DIGITAL SIGNAL PROCESSING UNIT 1 SIGNALS AND SYSTEMS 1. What is a continuous and discrete time signal? Continuous time signal: A signal x(t) is said to be continuous if it is defined for all time t. Continuous
DIGITAL SIGNAL PROCESSING UNIT 1 SIGNALS AND SYSTEMS 1. What is a continuous and discrete time signal? Continuous time signal: A signal x(t) is said to be continuous if it is defined for all time t. Continuous
Signals & Systems Handout #4
 Signals & Systems Handout #4 H-4. Elementary Discrete-Domain Functions (Sequences): Discrete-domain functions are defined for n Z. H-4.. Sequence Notation: We use the following notation to indicate the
Signals & Systems Handout #4 H-4. Elementary Discrete-Domain Functions (Sequences): Discrete-domain functions are defined for n Z. H-4.. Sequence Notation: We use the following notation to indicate the
Discrete-time Fourier transform (DTFT) representation of DT aperiodic signals Section The (DT) Fourier transform (or spectrum) of x[n] is
![Discrete-time Fourier transform (DTFT) representation of DT aperiodic signals Section The (DT) Fourier transform (or spectrum) of x[n] is](/thumbs/89/98498368.jpg "Discrete-time Fourier transform (DTFT) representation of DT aperiodic signals Section The (DT) Fourier transform (or spectrum) of x[n] is") Discrete-time Fourier transform (DTFT) representation of DT aperiodic signals Section 5. 3 The (DT) Fourier transform (or spectrum) of x[n] is X ( e jω) = n= x[n]e jωn x[n] can be reconstructed from its
Discrete-time Fourier transform (DTFT) representation of DT aperiodic signals Section 5. 3 The (DT) Fourier transform (or spectrum) of x[n] is X ( e jω) = n= x[n]e jωn x[n] can be reconstructed from its
E : Lecture 1 Introduction
 E85.2607: Lecture 1 Introduction 1 Administrivia 2 DSP review 3 Fun with Matlab E85.2607: Lecture 1 Introduction 2010-01-21 1 / 24 Course overview Advanced Digital Signal Theory Design, analysis, and implementation
E85.2607: Lecture 1 Introduction 1 Administrivia 2 DSP review 3 Fun with Matlab E85.2607: Lecture 1 Introduction 2010-01-21 1 / 24 Course overview Advanced Digital Signal Theory Design, analysis, and implementation
DHANALAKSHMI COLLEGE OF ENGINEERING DEPARTMENT OF ELECTRICAL AND ELECTRONICS ENGINEERING EC2314- DIGITAL SIGNAL PROCESSING UNIT I INTRODUCTION PART A
 DHANALAKSHMI COLLEGE OF ENGINEERING DEPARTMENT OF ELECTRICAL AND ELECTRONICS ENGINEERING EC2314- DIGITAL SIGNAL PROCESSING UNIT I INTRODUCTION PART A Classification of systems : Continuous and Discrete
DHANALAKSHMI COLLEGE OF ENGINEERING DEPARTMENT OF ELECTRICAL AND ELECTRONICS ENGINEERING EC2314- DIGITAL SIGNAL PROCESSING UNIT I INTRODUCTION PART A Classification of systems : Continuous and Discrete
DSP-I DSP-I DSP-I DSP-I
 NOTES FOR 8-79 LECTURES 3 and 4 Introduction to Discrete-Time Fourier Transforms (DTFTs Distributed: September 8, 2005 Notes: This handout contains in brief outline form the lecture notes used for 8-79
NOTES FOR 8-79 LECTURES 3 and 4 Introduction to Discrete-Time Fourier Transforms (DTFTs Distributed: September 8, 2005 Notes: This handout contains in brief outline form the lecture notes used for 8-79
Complex symmetry Signals and Systems Fall 2015
 18-90 Signals and Systems Fall 015 Complex symmetry 1. Complex symmetry This section deals with the complex symmetry property. As an example I will use the DTFT for a aperiodic discrete-time signal. The
18-90 Signals and Systems Fall 015 Complex symmetry 1. Complex symmetry This section deals with the complex symmetry property. As an example I will use the DTFT for a aperiodic discrete-time signal. The
6.003: Signals and Systems
 6.003: Signals and Systems Z Transform September 22, 2011 1 2 Concept Map: Discrete-Time Systems Multiple representations of DT systems. Delay R Block Diagram System Functional X + + Y Y Delay Delay X
6.003: Signals and Systems Z Transform September 22, 2011 1 2 Concept Map: Discrete-Time Systems Multiple representations of DT systems. Delay R Block Diagram System Functional X + + Y Y Delay Delay X
Chap 4. State-Space Solutions and
 Chap 4. State-Space Solutions and Realizations Outlines 1. Introduction 2. Solution of LTI State Equation 3. Equivalent State Equations 4. Realizations 5. Solution of Linear Time-Varying (LTV) Equations
Chap 4. State-Space Solutions and Realizations Outlines 1. Introduction 2. Solution of LTI State Equation 3. Equivalent State Equations 4. Realizations 5. Solution of Linear Time-Varying (LTV) Equations
The Laplace Transform
 The Laplace Tranform Prof. Siripong Potiuk Pierre Simon De Laplace 749-827 French Atronomer and Mathematician Laplace Tranform An extenion of the CT Fourier tranform to allow analyi of broader cla of CT
The Laplace Tranform Prof. Siripong Potiuk Pierre Simon De Laplace 749-827 French Atronomer and Mathematician Laplace Tranform An extenion of the CT Fourier tranform to allow analyi of broader cla of CT
Representing a Signal
 The Fourier Series Representing a Signal The convolution method for finding the response of a system to an excitation takes advantage of the linearity and timeinvariance of the system and represents the
The Fourier Series Representing a Signal The convolution method for finding the response of a system to an excitation takes advantage of the linearity and timeinvariance of the system and represents the
EE123 Digital Signal Processing
 EE123 Digital Signal Processing Lecture 5 based on slides by J.M. Kahn Info Last time Finished DTFT Ch. 2 z-transforms Ch. 3 Today: DFT Ch. 8 Reminders: HW Due tonight The effects of sampling What is going
EE123 Digital Signal Processing Lecture 5 based on slides by J.M. Kahn Info Last time Finished DTFT Ch. 2 z-transforms Ch. 3 Today: DFT Ch. 8 Reminders: HW Due tonight The effects of sampling What is going